
Invers Kinematika Robot Planar 2 Do F
12
Invers Kinematika Variabel JointParameter Joint Posisi EoEPosisi EoE Ө1,Ө2Ө1,Ө2 Invers KinematikaKinematika Invers Kinematika Robot Planar 2 DoF I. Tujuan - Mengimplementasikan invers kinematika robot planar 2 DoF menggunakan mikrokontroller 8535 II. Dasar Teori Control Chart Gambar di atas menunjukkan tentang bagaimana mekanisme yang terjadi pada invers kinematika robot planar 2 DoF. Dimana invers kinematika digunakan untuk mencari besar dari nilai sudut resolute joint yang diperlukan untuk mencapai posisi yang ditentukan dalam proses pengambilan suatu objek Input yang diberikan merupakan posisi EoE ( x b ,y b ) dan hasilnya berupa besar sudut θ 1 dan θ 2 . Penentuan nilai sudut θ ini dapat dicari melalui rumus- rumus berikut: θ 2 ( x b ,y b ) =cos −1 ( x b 2 +y b 2 −L 1 2 −L 2 2 2 L 1 L 2 ) → cos θ 2 = ( x b 2 + y b 2 −L 1 2 −L 2 2 2 L 1 L 2 )
Transcript of Invers Kinematika Robot Planar 2 Do F

Invers Kinematika
Variabel JointParameter JointPosisi EoEPosisi EoE
Ө1,Ө2Ө1,Ө2Invers KinematikaKinematika
Invers Kinematika Robot Planar 2 DoF
I. Tujuan- Mengimplementasikan invers kinematika robot planar 2
DoF menggunakan mikrokontroller 8535II. Dasar Teori
Control Chart
Gambar di atas menunjukkan tentang bagaimanamekanisme yang terjadi pada invers kinematika robotplanar 2 DoF. Dimana invers kinematika digunakan untukmencari besar dari nilai sudut resolute joint yangdiperlukan untuk mencapai posisi yang ditentukan dalamproses pengambilan suatu objek
Input yang diberikan merupakan posisi EoE (xb,yb) danhasilnya berupa besar sudut θ1 dan θ2. Penentuan nilaisudut θ ini dapat dicari melalui rumus- rumus berikut:
θ2 (xb,yb)=cos−1(xb2+yb
2−L12−L22
2L1L2)
→cosθ2=(xb2+yb2−L1
2−L22
2L1L2 )

θ1 (xb,yb)=tan−1(xb
yb)−tan−1( L2sinθ2L1+L2cosθ2 )
→sinθ2=√1−cos2θ2
Keterangan : parameter joint yang lebih dekat denganEoE dicari terlebih dahulu. Jadi Ө2 dicari terlebihdahulu.

III. Peralatan1. Modul robot planar 2. \modul minsys dengan mikrokontroller ATMega 85353. DC power supply4. Kabel USB dan ISP downloader5. PC + software codevision AVR6. Kabel penjepit buaya7. Kabel power8. Jumper9. Busur10. Penngaris
IV. Setting PercobaanA. Setting Percobaan 1 (mencari nilai OCR1A)


B. Setting Percobaan 2

V. ProsedurA. Pendahuluan
1. Menyiapkan alat dan bahan yang dibutuhkan2. Memeriksa kondisi dari alat dan bahan tersebut3. Menhidupkan PC4. Menghidupkan DC power supply dan mengatur teganganoutput sebesar 5 volt.
5. Menyambungkan power supply dengan modulmikrokontroller
6. Menghubungkan PC dengan modul mikrokontrollermenggunakan kabel USB + ISP downloader
7. Bila lampu indikator downloader telah menyalamenandakan telah terhubung.
B. Percobaan 1 (untuk mencari nilai OCR1A)1. Membuka software Codevision AVR pada PC2. Mengetikkan program seperti program I pada percobaan
kinematika robot planar satu lengan3. Menghubungkan kabel Data, VCC, dan GND motor servo 1
(lengan 1) pada PORTD seperti gambar setting percobaanA.
4. Meng-compile program, bila tidak ada error dapatlangsung di-download. Bila masih terdapat error, makaterdapat kesalahan pada program dan harus dibenarkanhingga error tidak terdapat lagi
5. Setelah berhasil di-download-kan, akan terdapat reaksipada lengan robot. Mengatur posisi lengan 1 robot padasudut 0° dari sumbu x, dengan menekan push button 0(pin0) dan push button 1 (pin1)
6. Mengambil data OCR1A yang terlihat pada layar LCD. Danselanjutnya data disebut OCR1A0
7. Menekan push button 0 (pin0) dan push button 1 (pin1)hingga didapatkan posisi lengan 1 pada sudut 90° darisumbu x
8. Mengambil data OCR1A yang terlihat pada layar LCD. Danselanjutnya data disebut OCR1A90
9. Melepaskan kabel motor servo 1 (lengan 1) dari modulmikrokontroller dan menggantikannya dengan kabel motorservo 2 (lengan 2)
10. Menekan tombol reset pada modul mikrokontroller11. Mengatur posisi lengan 2 robot pada sudut 0° dari
sumbu x, dengan menekan push button 0 (pin0) dan pushbutton 1 (pin1)
12. Mengambil data OCR1A yang terlihat pada layar LCD.Dan selanjutnya data disebut OCR1B0
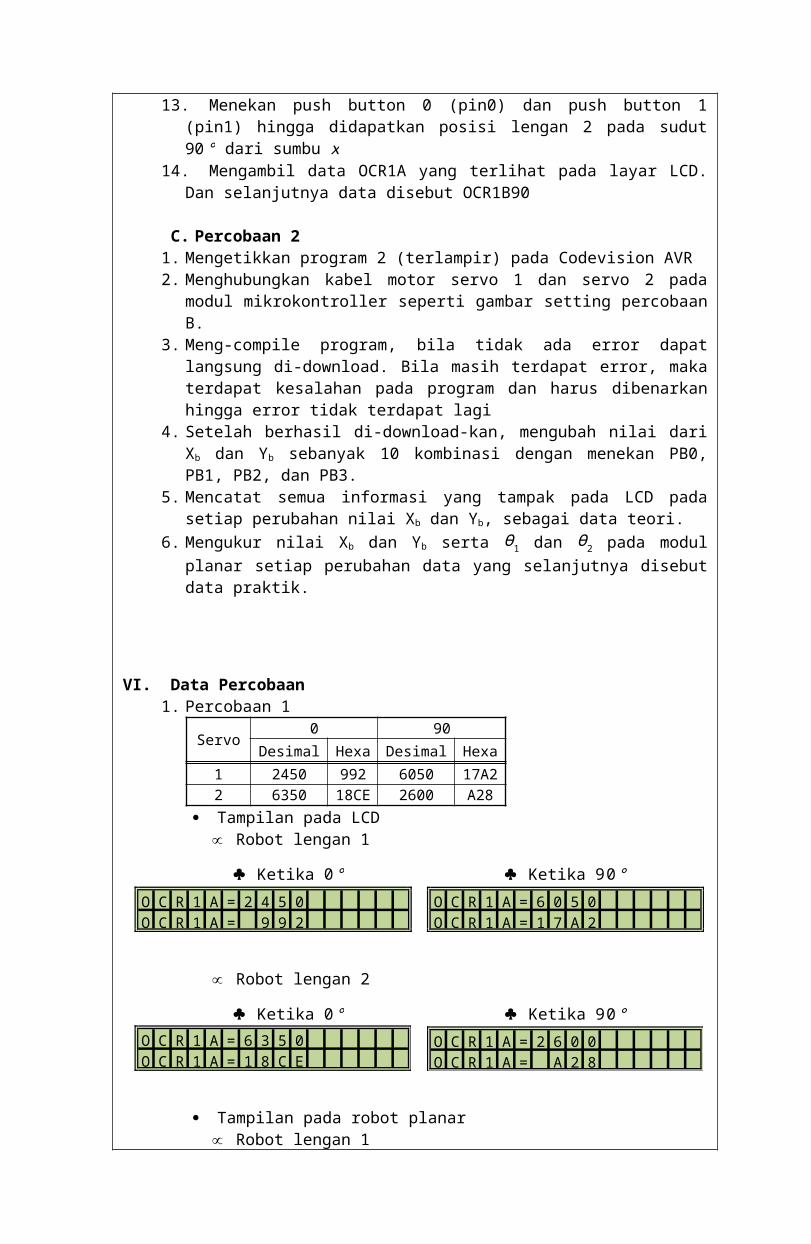
13. Menekan push button 0 (pin0) dan push button 1(pin1) hingga didapatkan posisi lengan 2 pada sudut90° dari sumbu x
14. Mengambil data OCR1A yang terlihat pada layar LCD.Dan selanjutnya data disebut OCR1B90
C. Percobaan 21. Mengetikkan program 2 (terlampir) pada Codevision AVR 2. Menghubungkan kabel motor servo 1 dan servo 2 pada
modul mikrokontroller seperti gambar setting percobaanB.
3. Meng-compile program, bila tidak ada error dapatlangsung di-download. Bila masih terdapat error, makaterdapat kesalahan pada program dan harus dibenarkanhingga error tidak terdapat lagi
4. Setelah berhasil di-download-kan, mengubah nilai dariXb dan Yb sebanyak 10 kombinasi dengan menekan PB0,PB1, PB2, dan PB3.
5. Mencatat semua informasi yang tampak pada LCD padasetiap perubahan nilai Xb dan Yb, sebagai data teori.
6. Mengukur nilai Xb dan Yb serta Ө1 dan Ө2 pada modulplanar setiap perubahan data yang selanjutnya disebutdata praktik.
VI. Data Percobaan1. Percobaan 1
Servo 0 90Desimal Hexa Desimal Hexa
1 2450 992 6050 17A22 6350 18CE 2600 A28
Tampilan pada LCD Robot lengan 1
Ketika 0°O C R 1 A = 2 4 5 0O C R 1 A = 9 9 2
Ketika 90°O C R 1 A = 6 0 5 0O C R 1 A = 1 7 A 2
Robot lengan 2
Ketika 0°O C R 1 A = 6 3 5 0O C R 1 A = 1 8 C E
Ketika 90°O C R 1 A = 2 6 0 0O C R 1 A = A 2 8
Tampilan pada robot planar Robot lengan 1

Ketika 0° Ketika 90°
Robot lengan 2
Ketika 0° Ketika 90°

2. Percobaan 2Error EoE
Xb(cm ) Yb (cm ) θ1 θ2 Xb(cm ) Yb (cm ) θ1 θ2 Xb(cm ) Yb (cm ) θ1 θ2 E (cm )16,0 48,0 57,7 26,7 16,5 49,0 60,0 23,5 3,13 2,08 3,99 11,99 1,1212,0 46,0 50,5 47,8 12,0 48,2 57,0 45,0 0,00 4,78 12,87 5,86 2,200,0 40,0 48,4 79,5 1,4 43,0 51,0 76,0 ∞ 7,50 5,37 4,40 3,318,0 50,0 67,2 26,3 8,3 51,0 70,0 26,0 3,75 2,00 4,17 1,14 1,0424,0 38,0 26,0 60,4 24,6 39,2 30,0 61,0 2,50 3,16 15,38 0,99 1,3414,0 46,0 49,8 44,8 14,5 27,6 54,0 46,0 3,57 40,00 8,43 2,68 18,416,0 46,0 54,6 53,8 5,7 48,0 59,0 55,0 5,00 4,35 8,06 2,23 2,0240,0 32,0 28,4 19,8 40,3 32,6 34,0 19,0 0,75 1,88 19,72 4,04 0,676,0 42,0 45,0 70,7 7,0 44,1 47,0 71,0 16,67 5,00 4,44 0,42 2,336,0 48,0 60,5 43,1 5,5 49,5 64,0 46,0 8,33 3,13 5,79 6,73 1,58
PraktikLCD (teori) Error
Sample tampilan pada LCD ketika (xb,yb)=(14.0,46.0)
E o E = ( 1 4 . 0 , 4 6 . 0T e t a = ( 4 9 , 8 , 4 4 . 8 )
Sample tampilan pada modul robot planar ketika(xb,yb)=(14.0,46.0)
Sample perhitungan ketika (xb,yb)=(16.0,48.0)
Untuk mencari persentase kesalahan darixb,yb,θ1,danθ2 dapat menggunakan rumus:
error (% )=|nilaiteori−nilaipraktiknilaiteori |×100%
Untuk mencari nilai dari error EoE, dapat digunakan rumus:
E (cm )=√(xbTeori−xbPraktik)2+(ybTeori−ybPraktik)2
Error (%)xbxb teori = 16.0 cmxb praktik = 16.5 cm

error (% )=|16.0−16.516.0 |×100%=3.13%
Error (%)ybyb teori = 48.0 cmyb praktik = 49.0 cm
error (% )=|48.0−49.048.0 |×100%=2.08%
Error (%)θ1θ1teori = 57.7°θ1praktik = 60.0°
error (% )=|57.7−60.057.7 |×100%=3.99%
Error (%)θ2θ2teori = 26.7°θ2praktik = 23.5°
error (% )=|26.7−23.526.7 |×100%=11.99%
Error EoE (cm)xb teori = 16.0 cmyb teori = 48.0 cmxb praktik = 16.5 cmyb praktik = 49.0 cm
E (cm )=√(16.0−16.5)2+(48.0−49.0)2
E (cm )=√(0.5)2+(−1)2
E (cm )=√0.25+1
E (cm )=√1.25=1.12cm
VII. Analisa DataBerdasarkan data percobaan yang telah kami dapat
pada praktum ini, dapat saya analisa bahwa inverskinematika 2 DoF merupakan proses dimana kita harusmencari sudut θ1,danθ2 dengan menentukkan koordinat dariEoE (End of Effector). Dan dalam hal ini nilai dari θ1

harus dicari terlebih dahulu dikarenakan parameter jointθ1 adalah parameter yang terdekat dengan posisi EoE.
Pada pecobaan pertama kami mencari nilai dari OCR1Aterlebih dahulu sebagai kalibrasi robot planar dan nilaiyang didapatkan akan digunakan pada percobaan inerskinematika itu sendiri. Saat pencarian nilai OCR1A darimotor servo satu lengan digerakkan pada sudut 0° darisumbu x0 dan diperoleh nilai OCR1A = 2450 yangselanjutnya disebut OCR1A0, dan dilanjutkan denganmengarahkan lengan 1 pada sudut 90° dari sumbu x0 denganmenekan PB0 dan PB1 sehingga didapatkan nilai OCR1A =6050 yang seljutnya disebut OCR1A90. Hal yang samadilakukan pada motor servo 2 sehingga didapatkan nilaiOCR1A ketika lengan 2 0° dari sumbu x1 adalah 6350 yangselanjutnya disebut OCR1B0 dan nilai OCR1A ketikalengan 2 90° dari sumbu x1 adalah 2600yang selanjutnyadisebut OCR1B90.

Nilai OCR yang yang telah didapatkan tersebutdimasukkan dalam rumus yang diprogram sedemikian rupahingga daat menggerakkan lengan robot tersebut. Sehinggapada LCD menunjukkan data yang disebut data teori danpengukuran yang dilakukan merupakan data percobaandengan sample hasil percobaan seperti berikut:
xb teori = 16.0 cmyb teori = 48.0 cmθ1teori = 57.7°θ2teori = 26.7°
xb praktik = 16.5 cmyb praktik = 49.0 cmθ1praktik = 60.0°θ2praktik = 23.5°
Sehingga dari nilai nilai tersebut dapat dicari nilai persentase kesalahan xb,yb,θ1,danθ2 dan juga error EoE menggunakan rumus :
error (% )=|nilaiteori−nilaipraktiknilaiteori |×100%
E (cm )=√(xbTeori−xbPraktik)2+(ybTeori−ybPraktik)2
VIII. KesimpulanBerdasarkan hasil pengamatan pada percobaan dan
datanya dapat saya simpulkan bahwa:- Invers kinematika digunakan untuk mencari besar dari
nilai sudut resolute joint yang diperlukan untukmencapai posisi yang ditentukan dalam prosespengambilan suatu objek
- Invers kinematika menggunakan proses untuk mencarinilai θ1dan θ2menggunakan koordinat EoE.
- Error yang didapat dimungkinkan kerana akurasi darimodul tidaklah sempurna dan juga kesaahan pembacaan (Human Error)




















