Interaction between signal settings and traffic flow patterns on road networks
15
INTERACTION BETWEEN SIGNAL SETTINGS AND TRAFFIC FLOW PATTERNS ON ROAD NETWORKS Gaetano FUSCO 1 , Guido GENTILE 1 , Lorenzo MESCHINI 1 , Maurizio BIELLI 2 , Giovanni FELICI 2 , Ernesto CIPRIANI 3 , Stefano GORI 3 , Marialisa NIGRO 3 Abstract. The paper illustrates methodology and preliminary results obtained in the project of basic research “Interaction between signal settings and traffic flow patterns on road networks”, funded by the Italian Ministry of University and Research. The object of the project is to develop a general procedure to study, model and solve the problem of the optimal road network signal settings, by taking into account the interaction between signal control systems and traffic flow patterns. Different macroscopic and microscopic modelling approaches are discussed and applied to test cases. Moreover, different signal control strategies are introduced and tested by numerical experiments on a wide area of the road network of Roma. 1. Introduction The paper describes the objectives, the methodology and the preliminary results of the research project “Interaction between signal settings and traffic flow patterns on road networks”, granted by the Italian Ministry of University and Research with the Fund for Investments on Basic Research (FIRB). The project joins three research units, belonging respectively to the University of Rome “La Sapienza”, the University “Roma Tre” and the Institute for Information System Analysis (IASI) of the Italian National Council of Research. 1 Università degli Studi di Roma La Sapienza, via Eudossiana, 18, Roma, [email protected]; [email protected]; [email protected] 2 Istituto di Analisi dei Sistemi ed Informatica, CNR, viale Manzoni, 30, Roma, [email protected]; [email protected] 3 Università degli Studi Roma Tre, Dipartimento di Scienze dell’Ingegneria Civile, Via Vito Volterra, 62, [email protected]; [email protected]; [email protected]
Transcript of Interaction between signal settings and traffic flow patterns on road networks

INTERACTION BETWEEN SIGNAL SETTINGS AND TRAFFIC FLOW PATTERNS ON ROAD NETWORKS
Gaetano FUSCO1 Guido GENTILE1 Lorenzo MESCHINI1 Maurizio BIELLI2 Giovanni FELICI2 Ernesto CIPRIANI3 Stefano GORI3 Marialisa NIGRO3
Abstract The paper illustrates methodology and preliminary results obtained in the project of basic research ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo funded by the Italian Ministry of University and Research The object of the project is to develop a general procedure to study model and solve the problem of the optimal road network signal settings by taking into account the interaction between signal control systems and traffic flow patterns Different macroscopic and microscopic modelling approaches are discussed and applied to test cases Moreover different signal control strategies are introduced and tested by numerical experiments on a wide area of the road network of Roma
1 Introduction
The paper describes the objectives the methodology and the preliminary results of the research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo granted by the Italian Ministry of University and Research with the Fund for Investments on Basic Research (FIRB) The project joins three research units belonging respectively to the University of Rome ldquoLa Sapienzardquo the University ldquoRoma Trerdquo and the Institute for Information System Analysis (IASI) of the Italian National Council of Research
1 Universitagrave degli Studi di Roma La Sapienza via Eudossiana 18 Roma gaetanofuscouniroma1it guidogentileuniroma1it lorenzomeschiniuniroma1it 2 Istituto di Analisi dei Sistemi ed Informatica CNR viale Manzoni 30 Roma bielliiasirmcnrit feliciiasirmcnrit 3 Universitagrave degli Studi Roma Tre Dipartimento di Scienze dellrsquoIngegneria Civile Via Vito Volterra 62 eciprianuniroma3it sgoriuniroma3it mnigrouniroma3it
The object of the research is to develop a general procedure to study model and solve the problem of optimal road network signal settings by taking into account the interaction between signal control systems and traffic flow patterns
This problem is interesting by both a theoretical and an application point of view since several mathematical studies and experimental results have shown that usual signal setting policies which simply adjust signal parameters according to the measured traffic may lead to system unstable solutions and deteriorate network performances
At core of the problem is the difference between a user equilibrium flow pattern where individuals choose their paths in order to minimize their own travel time and a system optimizing flow that minimizes total delay of all users The problem is object of an intensive research activity by the scientific community by many years (Cfr [4] and [27]
Although the combined problem of signal settings and traffic assignment is a well known non convex problem a systematic analysis of the objective function of the global optimization signal setting problem highlighted in several examples large quasi-convex intervals for even different levels and patterns of traffic demand [5] Still open problems are recognizing which conditions give rise to non convexity of the objective functions as well as individuating possible real-time strategies to keep the state of the traffic network near system optimal conditions
The global optimal signal settings on a road network is a complex problem that involves dynamic traffic patterns usersrsquo route choice and real-time application of suitable control strategies With several noticeable exceptions (Cfr [13] [26] [1] and [2]) the problem is usually tackled by following an equilibrium approach that is by searching for a possibly optimal configuration of mutually consistent traffic flows and signal variables The equilibrium approach assumes but does not reproduce the existence of a process where drivers correct their route choice day-to-day according to the modified network performances until no further improvement could be achieved The traffic flow is modeled by a stationary relationship between link travel time and link flow Although the delay at node approaches can be taken into account as it may be added to the link cost neither a realistic modeling of traffic congestion on a road network or an explicit representation of real-time traffic control is possible
In order to investigate real-time applications the research project aims at extending the static modeling framework usually adopted in the scientific literature to apply dynamic assignment models and deal with both coordinated arteries and traffic-flow responsive signal settings
The study is being developed focusing on the following topics bull Modelling of traffic flow along coordinated arteries and urban traffic networks bull Integration of signal control and dynamic assignment problems bull Advanced models and methods for signal settings and traffic control
2 Modeling framework
Many models with increasing levels of complexity have been analyzed in order to identify the most suitable for different possible applications to arteries or networks in static or dynamic contexts
21 Analytical traffic model for synchronized arteries
A simple analytical traffic model that describes the average delay along a synchronized artery (see ref [24] for further details) has been here extended to apply different hypotheses of driversrsquo behavior Such hypotheses concern the capability of drivers to accelerate and catch up the tail of a preceding platoon if any Specifically the following assumptions have been introduced a) all vehicles follow the same trajectory and after having been stopped at a signal accelerate at a given rate until they reach a given cruise speed b) all vehicles can accelerate along a link and catch up the previous platoon c) all vehicles can accelerate up to a given maximal acceleration rate so that they catch up the previous platoon only if the link is long enough
This model has been developed specifically to assess synchronization strategies along signalized arteries Delays at every approach of the artery are computed by checking for each arriving platoon which condition occurs among the following a) the platoon arrives during the red (or -if a queue already exists at that approach- before the queue is cleared so that the first vehicle of the platoon is stopped) and ends during the green b) the platoon arrives during the green (or after the queue if any has been cleared) and ends during the red c) the platoon arrives during the green after the queue if any has been cleared and ends during the green of the same cycle d) the platoon arrives during the green and ends after the green of the next cycle A different analytical expression for the delay holds for each condition
Since the existence and the length of a queue can not be determined before all platoons have been analyzed the delay computation requires an iterative procedure that classifies the different platoons progressively It is worth noting that such a procedure involves few iterations because the platoons can both catch up each other along the links and recompose themselves at nodes when more platoons arrive during the red phase
22 Dynamic traffic network loading
The cell transmission model [6] has been here extended to deal with coordinated arteries by introducing the following changes
bull in less than critical conditions vehicles can move forwards by a generic quantity dependent on the traffic density on the link
bull capability of simulating even complex signalized intersections bull apply dynamic shortest paths and follow different OD pairs in the network loading
process The extended cell transmission model has been selected as the most suitable
mathematical model to assess and calibrate real-time feedback signal control systems that use the relative link occupancy as control variable like Traffic Urban Control does [7]
23 Microscopic simulation of traffic flow
A microscopic simulation model aimed at reproducing the behavior and interaction of vehicles on road networks has been developed by the IASI [11] This microscopic simulator is able to manage different aspects of vehiclesrsquo dynamic that is acceleration and deceleration based on the car-following principles [6] and on the state of downstream signals lane changes and overtakes based on gap-acceptance rules and vehiclesrsquo paths Vehicles are generated according to the negative exponential distribution where the number of vehicles to be generated every minute can be time varying in order to simulate the variation of vehicular flows during the day
The system includes a graphic interface developed in the UNIX environment in C language with the public domain graphic libraries X11 The micro-simulation is animated on a reproduction of the road network where the signals and the vehicles are visualized
24 Dynamic traffic assignment model
Dynamic traffic assignment models are the most advanced modeling framework to simulate traffic patterns in congested urban networks as they can both simulate the flow progression along links and reproduce the complex interaction between traffic flow and route choice behavior of users
Several software packages for solving dynamic traffic assignment are now available Two of the most popular and advanced (Dynasmart [9] and Dynameq [8]) have been taken into consideration in this research and are object of a systematic comparison Both have been applied to a selected area of the road network of Roma having 51 centroids 300 nodes 870 links 70 signalized junctions (18 of which are under control) The figure below shows the study network as displayed by the two software packages
Figure 1 The study network in Dynameq (on the left) and Dynasmart (on the right)
Both models are simulation based but they differ as far as the modeling approach of
traffic flow (Dynameq assumes a fundamental triangular diagram Dynasmart a modified Greenshield model [11]) the route choice (two phases for Dynameq -a path generation phase in which one new path at each iteration is added until the maximum predefined number of paths is reached and a convergence phase in which no new paths are added- one
phase for Dynasmart which does not introduce any distinction between the generation phase and the convergence phase) the simulation process (Dynameq uses an event based procedure Dynasmart a macroparticle simulation model) convergence criterion (time based for Dynameq flow based for Dynasmart)
Thus Dynameq aims especially at providing a detailed representation of traffic flow by following a microsimulation approach It reproduces the traffic behavior at junction approaches by an explicit lane changing model and resolves conflicts at nodes by applying a gap acceptance rule It simulates pre-timed signal traffic control and ramp metering
On the other hand Dynasmart provides a simpler framework to model the traffic flow and aims rather at allowing simulating the impact of real-time strategies of traffic control and information systems (like actuated traffic signal ramp metering variable message signs and vehicle route guidance) on usersrsquo behavior
Even if the tests of the models are still in progress the following remarks can be made Comparison between static and dynamic assignment models shows that they provide not
so different patterns of traffic flows (R2=061) but as expected the static model overestimates the traffic flow as it assumes that the whole trip demand is assigned within a steady-state simulation period
Dynasmart and Dynameq predict very similar trends of the overall outflow of the network However their results are quite different as far as the route choice and consequently the traffic flow patterns
Finally simulation experiments highlight that a relevant issue of dynamic simulation assignment models is their capability to reproduce a temporary gridlock which is actually experienced on the network in the rush hour In fact if the dynamic assignment model is forced to prevent the gridlock the goodness-of-fit of simulated flow with respect to observed values decreases from R2=054 to R2=046
3 Signal Control strategies
The traditional approach to signal control assumes traffic pattern as given and signal parameters (cycle length green splits and offsets) as design variables However the combined problem of signal settings and traffic assignment generalizes the signal settings problem to concern the interaction between the control action and the usersrsquo reaction Usually it takes as design variables only green splits of signals at isolated junctions In the Global Optimization of Signal Settings Problem (Gossp) the whole system of signals is set to minimize an objective function that describe the global network performances In the Local Optimization of Signal Settings Problem (Lossp) flow-responsive signals are set independently each other either to minimize a local objective function or following a given criterion like equisaturation [29] or Po policy [25]
In the research project the usual approach is being extended in two directions taking into account signal synchronization and develop signal control strategies that can be suitably applied in real-time
31 Pre-timed synchronization
Signal synchronization of two-way arteries can be applied by following two different approaches -maximal bandwidth and minimum delay- although a solution procedure that applies the former problem to search for the solution of the latter one has been developed [23] Specifically it is well known that given the synchronization speed and the vector of distances between nodes the offsets that maximize the green bandwidth are univocally determined by the cycle length of the artery Such a property of the maximal bandwidth problem has been exploited to facilitate the search for a sub-optimal solution of the minimum delay problem Thus a linear search of the sub-optimal cycle length is first carried out starting from the minimum cycle length for the artery and then a local search is performed starting from the offset vector corresponding to that cycle length
The analytical model described in section 21 makes it possible a quick evaluation of the artery delay without involving any simulation The performances of the solutions obtained by applying the analytical model are then assessed by dynamic traffic assignment
Moreover two different strategies for one-way signal synchronization are also introduced in this paper The simplest strategy consists of starting the red of each node just after the end of the primary platoon (that is the platoon with the most number of vehicles) In the second strategy the red is checked to start after the end of the every platoon and the position giving the least delay is then selected
Preliminary tests conducted by carrying out a systematic analysis of the optimal offsets on an artery of Roma underline that the latter strategy outperforms the former one especially for large traffic flows Such an occurrence highlights that the performances of the artery are heavily affected by the complex process of platoon re-combination at nodes so that the strategy that favor the main platoon can be ineffective if it is stopped later while secondary platoons can run without being delayed
Numerical experiments concerning the analytical model have been carried out on Viale Regina Margherita a 6-node artery situated into the study network of Rome in the peak-off period In the first experiment the common cycle length of the artery has been set equal to the maximal cycle length of the junctions The green times have been adjusted consequently to keep the green splits unchanged Thus the offsets are the only control vector In the second experiment also the cycle length has been varied from the minimum cycle for the most critical junction of the artery (namely 32s) until its current value (1085s) As before the objective functions of the two problems are the maximal bandwidth and the minimum delay for the artery
The corresponding values of maximum bandwidth and sub-optimal minimum delay offsets are reported in Table 1 and Table 2 respectively
Offset of maximum bandwidth [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 149 195 242 288 335 381 428 474 1047 3 149 405 502 598 335 381 428 474 504 4 309 195 502 598 695 791 888 474 504 5 155 204 92 611 349 398 446 1005 526 6 177 233 29 34 400 455 511 56 65
Table 1 Offset of maximum bandwidth
Offset of minimum delay [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 319 395 452 108 125 641 768 944 17 3 159 55 452 598 45 381 428 474 475 4 289 195 262 378 125 591 648 474 505 5 185 414 272 611 350 398 446 845 851 6 197 323 49 34 430 545 631 76 59
Table 2 Sub-optimal offset of minimum delay
Figure 2 plots the value of delay at nodes along the artery for different values of the cycle length and the sub-optimal offsets The analytical delay model described in section 21 has been applied by assuming acceleration capabilities of vehicles and then allowing a platoon catching up the preceding one As expected the delay function is non convex The lowest value is obtained for a cycle length of 42s while other local minima are obtained for the cycle lengths of 72s and 102s
0
20
40
60
80
100
120
32 42 52 62 72 82 92 102
Cycle length [s]
Del
ay [s
veh
]
Figure 2 Estimation of node delay along the artery by the analytical traffic model for
different values of the cycle length
32 Actuated signal control based on logic programming
The traffic actuated strategies are constructed on the basis of the current configuration of the traffic flows or of the current number of vehicles at the controlled junctions Thus both the measurement of data and the elaborations aimed at identifying the traffic signal setting at each instant are carried out in real time
The literature proposes several control methods that use mathematical programming amongst others successful examples of adaptive systems are the SCOOT system [15] SCATS [18] UTOPIA [19] COP [14] New approaches have been recently proposed with the development of models based on fuzzy logic such [3] [17]
Traffic control based on logic programming have also recently appeared The method adopted in this paper described in [10] [11] and [12] is one of the first models and applications of this type It is an adaptive method actuated by vehicles that adopts logic programming to model and solve the decision problems associated with traffic control Such a method can be applied with success to urban intersections with high levels of traffic where many different and unpredictable events contribute to large fluctuations in the number of vehicles that use the intersection The logic programming methods based on vehicle counts make it possible to design the traffic control strategies with a high degree of simplicity and flexibility The system makes use of a very efficient logic programming solver the Leibniz System [28] that is capable of generating fast solution algorithms for the decision problems associated with traffic signal setting
This method has been applied to a system of two signalized and coordinated junctions in Roma Italy The junctions which are 180 meters apart and lay on a urban arterial road used to access and egress the city are characterized by high congestion peaks and flow conditions varying rapidly over time The schema of the study area is reported in Figure 3
In cooperation with the Mobility Agency of Rome a preliminary analysis of technical aspects signal plans traffic flows and congestion levels has been performed Some historic samples of traffic data have been therefore integrated with a data collection campaign with the use of temporary loop detectors Collected data have been used to calibrate and validate the simulation of the system with the micro simulator described in section 23
To take into account the problems related to the quantity and quality of available traffic data both incomplete and at an aggregate level this application required to integrate and refine the detected data with analytic processes based on mathematical traffic flow models To this end a suitable macroscopic model based on the simplified theory of kinematic waves [21] was developed to estimate the queue length of each stream at a given intersection as a function of vehicles counts taken at an upstream section
Figure 3 Scheme of the two junctions for the application of the signal control based
on logic programming
33 Real-time feedback network signal regulator
Real-time network traffic control strategies usually follow a hierarchical approach that optimizes cycle length green splits and offsets by evaluating their impacts on the network performances at different level of time and space aggregation
The Traffic Urban Control (TUC) model formulates the real-time traffic urban control system as a Linear-Quadratic (LQ) optimal control problem based on a store-and-forward type of mathematical modeling [7] The basic control objective is to minimize the risk of oversaturation and the spillback of link queues by suitably varying in a coordinated manner the green-phase durations of all stages at all network junctions around some nominal values
Via Fanella
Via Portuense
Via Affogalasino
Via del Trullo
suburbs city center
7
4
6
1
3
2
5
Loop detector connected both to the local regulator and to the central system
Loop detector connected only to the local regulator
Regulator
180 m
We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

The object of the research is to develop a general procedure to study model and solve the problem of optimal road network signal settings by taking into account the interaction between signal control systems and traffic flow patterns
This problem is interesting by both a theoretical and an application point of view since several mathematical studies and experimental results have shown that usual signal setting policies which simply adjust signal parameters according to the measured traffic may lead to system unstable solutions and deteriorate network performances
At core of the problem is the difference between a user equilibrium flow pattern where individuals choose their paths in order to minimize their own travel time and a system optimizing flow that minimizes total delay of all users The problem is object of an intensive research activity by the scientific community by many years (Cfr [4] and [27]
Although the combined problem of signal settings and traffic assignment is a well known non convex problem a systematic analysis of the objective function of the global optimization signal setting problem highlighted in several examples large quasi-convex intervals for even different levels and patterns of traffic demand [5] Still open problems are recognizing which conditions give rise to non convexity of the objective functions as well as individuating possible real-time strategies to keep the state of the traffic network near system optimal conditions
The global optimal signal settings on a road network is a complex problem that involves dynamic traffic patterns usersrsquo route choice and real-time application of suitable control strategies With several noticeable exceptions (Cfr [13] [26] [1] and [2]) the problem is usually tackled by following an equilibrium approach that is by searching for a possibly optimal configuration of mutually consistent traffic flows and signal variables The equilibrium approach assumes but does not reproduce the existence of a process where drivers correct their route choice day-to-day according to the modified network performances until no further improvement could be achieved The traffic flow is modeled by a stationary relationship between link travel time and link flow Although the delay at node approaches can be taken into account as it may be added to the link cost neither a realistic modeling of traffic congestion on a road network or an explicit representation of real-time traffic control is possible
In order to investigate real-time applications the research project aims at extending the static modeling framework usually adopted in the scientific literature to apply dynamic assignment models and deal with both coordinated arteries and traffic-flow responsive signal settings
The study is being developed focusing on the following topics bull Modelling of traffic flow along coordinated arteries and urban traffic networks bull Integration of signal control and dynamic assignment problems bull Advanced models and methods for signal settings and traffic control
2 Modeling framework
Many models with increasing levels of complexity have been analyzed in order to identify the most suitable for different possible applications to arteries or networks in static or dynamic contexts
21 Analytical traffic model for synchronized arteries
A simple analytical traffic model that describes the average delay along a synchronized artery (see ref [24] for further details) has been here extended to apply different hypotheses of driversrsquo behavior Such hypotheses concern the capability of drivers to accelerate and catch up the tail of a preceding platoon if any Specifically the following assumptions have been introduced a) all vehicles follow the same trajectory and after having been stopped at a signal accelerate at a given rate until they reach a given cruise speed b) all vehicles can accelerate along a link and catch up the previous platoon c) all vehicles can accelerate up to a given maximal acceleration rate so that they catch up the previous platoon only if the link is long enough
This model has been developed specifically to assess synchronization strategies along signalized arteries Delays at every approach of the artery are computed by checking for each arriving platoon which condition occurs among the following a) the platoon arrives during the red (or -if a queue already exists at that approach- before the queue is cleared so that the first vehicle of the platoon is stopped) and ends during the green b) the platoon arrives during the green (or after the queue if any has been cleared) and ends during the red c) the platoon arrives during the green after the queue if any has been cleared and ends during the green of the same cycle d) the platoon arrives during the green and ends after the green of the next cycle A different analytical expression for the delay holds for each condition
Since the existence and the length of a queue can not be determined before all platoons have been analyzed the delay computation requires an iterative procedure that classifies the different platoons progressively It is worth noting that such a procedure involves few iterations because the platoons can both catch up each other along the links and recompose themselves at nodes when more platoons arrive during the red phase
22 Dynamic traffic network loading
The cell transmission model [6] has been here extended to deal with coordinated arteries by introducing the following changes
bull in less than critical conditions vehicles can move forwards by a generic quantity dependent on the traffic density on the link
bull capability of simulating even complex signalized intersections bull apply dynamic shortest paths and follow different OD pairs in the network loading
process The extended cell transmission model has been selected as the most suitable
mathematical model to assess and calibrate real-time feedback signal control systems that use the relative link occupancy as control variable like Traffic Urban Control does [7]
23 Microscopic simulation of traffic flow
A microscopic simulation model aimed at reproducing the behavior and interaction of vehicles on road networks has been developed by the IASI [11] This microscopic simulator is able to manage different aspects of vehiclesrsquo dynamic that is acceleration and deceleration based on the car-following principles [6] and on the state of downstream signals lane changes and overtakes based on gap-acceptance rules and vehiclesrsquo paths Vehicles are generated according to the negative exponential distribution where the number of vehicles to be generated every minute can be time varying in order to simulate the variation of vehicular flows during the day
The system includes a graphic interface developed in the UNIX environment in C language with the public domain graphic libraries X11 The micro-simulation is animated on a reproduction of the road network where the signals and the vehicles are visualized
24 Dynamic traffic assignment model
Dynamic traffic assignment models are the most advanced modeling framework to simulate traffic patterns in congested urban networks as they can both simulate the flow progression along links and reproduce the complex interaction between traffic flow and route choice behavior of users
Several software packages for solving dynamic traffic assignment are now available Two of the most popular and advanced (Dynasmart [9] and Dynameq [8]) have been taken into consideration in this research and are object of a systematic comparison Both have been applied to a selected area of the road network of Roma having 51 centroids 300 nodes 870 links 70 signalized junctions (18 of which are under control) The figure below shows the study network as displayed by the two software packages
Figure 1 The study network in Dynameq (on the left) and Dynasmart (on the right)
Both models are simulation based but they differ as far as the modeling approach of
traffic flow (Dynameq assumes a fundamental triangular diagram Dynasmart a modified Greenshield model [11]) the route choice (two phases for Dynameq -a path generation phase in which one new path at each iteration is added until the maximum predefined number of paths is reached and a convergence phase in which no new paths are added- one
phase for Dynasmart which does not introduce any distinction between the generation phase and the convergence phase) the simulation process (Dynameq uses an event based procedure Dynasmart a macroparticle simulation model) convergence criterion (time based for Dynameq flow based for Dynasmart)
Thus Dynameq aims especially at providing a detailed representation of traffic flow by following a microsimulation approach It reproduces the traffic behavior at junction approaches by an explicit lane changing model and resolves conflicts at nodes by applying a gap acceptance rule It simulates pre-timed signal traffic control and ramp metering
On the other hand Dynasmart provides a simpler framework to model the traffic flow and aims rather at allowing simulating the impact of real-time strategies of traffic control and information systems (like actuated traffic signal ramp metering variable message signs and vehicle route guidance) on usersrsquo behavior
Even if the tests of the models are still in progress the following remarks can be made Comparison between static and dynamic assignment models shows that they provide not
so different patterns of traffic flows (R2=061) but as expected the static model overestimates the traffic flow as it assumes that the whole trip demand is assigned within a steady-state simulation period
Dynasmart and Dynameq predict very similar trends of the overall outflow of the network However their results are quite different as far as the route choice and consequently the traffic flow patterns
Finally simulation experiments highlight that a relevant issue of dynamic simulation assignment models is their capability to reproduce a temporary gridlock which is actually experienced on the network in the rush hour In fact if the dynamic assignment model is forced to prevent the gridlock the goodness-of-fit of simulated flow with respect to observed values decreases from R2=054 to R2=046
3 Signal Control strategies
The traditional approach to signal control assumes traffic pattern as given and signal parameters (cycle length green splits and offsets) as design variables However the combined problem of signal settings and traffic assignment generalizes the signal settings problem to concern the interaction between the control action and the usersrsquo reaction Usually it takes as design variables only green splits of signals at isolated junctions In the Global Optimization of Signal Settings Problem (Gossp) the whole system of signals is set to minimize an objective function that describe the global network performances In the Local Optimization of Signal Settings Problem (Lossp) flow-responsive signals are set independently each other either to minimize a local objective function or following a given criterion like equisaturation [29] or Po policy [25]
In the research project the usual approach is being extended in two directions taking into account signal synchronization and develop signal control strategies that can be suitably applied in real-time
31 Pre-timed synchronization
Signal synchronization of two-way arteries can be applied by following two different approaches -maximal bandwidth and minimum delay- although a solution procedure that applies the former problem to search for the solution of the latter one has been developed [23] Specifically it is well known that given the synchronization speed and the vector of distances between nodes the offsets that maximize the green bandwidth are univocally determined by the cycle length of the artery Such a property of the maximal bandwidth problem has been exploited to facilitate the search for a sub-optimal solution of the minimum delay problem Thus a linear search of the sub-optimal cycle length is first carried out starting from the minimum cycle length for the artery and then a local search is performed starting from the offset vector corresponding to that cycle length
The analytical model described in section 21 makes it possible a quick evaluation of the artery delay without involving any simulation The performances of the solutions obtained by applying the analytical model are then assessed by dynamic traffic assignment
Moreover two different strategies for one-way signal synchronization are also introduced in this paper The simplest strategy consists of starting the red of each node just after the end of the primary platoon (that is the platoon with the most number of vehicles) In the second strategy the red is checked to start after the end of the every platoon and the position giving the least delay is then selected
Preliminary tests conducted by carrying out a systematic analysis of the optimal offsets on an artery of Roma underline that the latter strategy outperforms the former one especially for large traffic flows Such an occurrence highlights that the performances of the artery are heavily affected by the complex process of platoon re-combination at nodes so that the strategy that favor the main platoon can be ineffective if it is stopped later while secondary platoons can run without being delayed
Numerical experiments concerning the analytical model have been carried out on Viale Regina Margherita a 6-node artery situated into the study network of Rome in the peak-off period In the first experiment the common cycle length of the artery has been set equal to the maximal cycle length of the junctions The green times have been adjusted consequently to keep the green splits unchanged Thus the offsets are the only control vector In the second experiment also the cycle length has been varied from the minimum cycle for the most critical junction of the artery (namely 32s) until its current value (1085s) As before the objective functions of the two problems are the maximal bandwidth and the minimum delay for the artery
The corresponding values of maximum bandwidth and sub-optimal minimum delay offsets are reported in Table 1 and Table 2 respectively
Offset of maximum bandwidth [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 149 195 242 288 335 381 428 474 1047 3 149 405 502 598 335 381 428 474 504 4 309 195 502 598 695 791 888 474 504 5 155 204 92 611 349 398 446 1005 526 6 177 233 29 34 400 455 511 56 65
Table 1 Offset of maximum bandwidth
Offset of minimum delay [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 319 395 452 108 125 641 768 944 17 3 159 55 452 598 45 381 428 474 475 4 289 195 262 378 125 591 648 474 505 5 185 414 272 611 350 398 446 845 851 6 197 323 49 34 430 545 631 76 59
Table 2 Sub-optimal offset of minimum delay
Figure 2 plots the value of delay at nodes along the artery for different values of the cycle length and the sub-optimal offsets The analytical delay model described in section 21 has been applied by assuming acceleration capabilities of vehicles and then allowing a platoon catching up the preceding one As expected the delay function is non convex The lowest value is obtained for a cycle length of 42s while other local minima are obtained for the cycle lengths of 72s and 102s
0
20
40
60
80
100
120
32 42 52 62 72 82 92 102
Cycle length [s]
Del
ay [s
veh
]
Figure 2 Estimation of node delay along the artery by the analytical traffic model for
different values of the cycle length
32 Actuated signal control based on logic programming
The traffic actuated strategies are constructed on the basis of the current configuration of the traffic flows or of the current number of vehicles at the controlled junctions Thus both the measurement of data and the elaborations aimed at identifying the traffic signal setting at each instant are carried out in real time
The literature proposes several control methods that use mathematical programming amongst others successful examples of adaptive systems are the SCOOT system [15] SCATS [18] UTOPIA [19] COP [14] New approaches have been recently proposed with the development of models based on fuzzy logic such [3] [17]
Traffic control based on logic programming have also recently appeared The method adopted in this paper described in [10] [11] and [12] is one of the first models and applications of this type It is an adaptive method actuated by vehicles that adopts logic programming to model and solve the decision problems associated with traffic control Such a method can be applied with success to urban intersections with high levels of traffic where many different and unpredictable events contribute to large fluctuations in the number of vehicles that use the intersection The logic programming methods based on vehicle counts make it possible to design the traffic control strategies with a high degree of simplicity and flexibility The system makes use of a very efficient logic programming solver the Leibniz System [28] that is capable of generating fast solution algorithms for the decision problems associated with traffic signal setting
This method has been applied to a system of two signalized and coordinated junctions in Roma Italy The junctions which are 180 meters apart and lay on a urban arterial road used to access and egress the city are characterized by high congestion peaks and flow conditions varying rapidly over time The schema of the study area is reported in Figure 3
In cooperation with the Mobility Agency of Rome a preliminary analysis of technical aspects signal plans traffic flows and congestion levels has been performed Some historic samples of traffic data have been therefore integrated with a data collection campaign with the use of temporary loop detectors Collected data have been used to calibrate and validate the simulation of the system with the micro simulator described in section 23
To take into account the problems related to the quantity and quality of available traffic data both incomplete and at an aggregate level this application required to integrate and refine the detected data with analytic processes based on mathematical traffic flow models To this end a suitable macroscopic model based on the simplified theory of kinematic waves [21] was developed to estimate the queue length of each stream at a given intersection as a function of vehicles counts taken at an upstream section
Figure 3 Scheme of the two junctions for the application of the signal control based
on logic programming
33 Real-time feedback network signal regulator
Real-time network traffic control strategies usually follow a hierarchical approach that optimizes cycle length green splits and offsets by evaluating their impacts on the network performances at different level of time and space aggregation
The Traffic Urban Control (TUC) model formulates the real-time traffic urban control system as a Linear-Quadratic (LQ) optimal control problem based on a store-and-forward type of mathematical modeling [7] The basic control objective is to minimize the risk of oversaturation and the spillback of link queues by suitably varying in a coordinated manner the green-phase durations of all stages at all network junctions around some nominal values
Via Fanella
Via Portuense
Via Affogalasino
Via del Trullo
suburbs city center
7
4
6
1
3
2
5
Loop detector connected both to the local regulator and to the central system
Loop detector connected only to the local regulator
Regulator
180 m
We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

21 Analytical traffic model for synchronized arteries
A simple analytical traffic model that describes the average delay along a synchronized artery (see ref [24] for further details) has been here extended to apply different hypotheses of driversrsquo behavior Such hypotheses concern the capability of drivers to accelerate and catch up the tail of a preceding platoon if any Specifically the following assumptions have been introduced a) all vehicles follow the same trajectory and after having been stopped at a signal accelerate at a given rate until they reach a given cruise speed b) all vehicles can accelerate along a link and catch up the previous platoon c) all vehicles can accelerate up to a given maximal acceleration rate so that they catch up the previous platoon only if the link is long enough
This model has been developed specifically to assess synchronization strategies along signalized arteries Delays at every approach of the artery are computed by checking for each arriving platoon which condition occurs among the following a) the platoon arrives during the red (or -if a queue already exists at that approach- before the queue is cleared so that the first vehicle of the platoon is stopped) and ends during the green b) the platoon arrives during the green (or after the queue if any has been cleared) and ends during the red c) the platoon arrives during the green after the queue if any has been cleared and ends during the green of the same cycle d) the platoon arrives during the green and ends after the green of the next cycle A different analytical expression for the delay holds for each condition
Since the existence and the length of a queue can not be determined before all platoons have been analyzed the delay computation requires an iterative procedure that classifies the different platoons progressively It is worth noting that such a procedure involves few iterations because the platoons can both catch up each other along the links and recompose themselves at nodes when more platoons arrive during the red phase
22 Dynamic traffic network loading
The cell transmission model [6] has been here extended to deal with coordinated arteries by introducing the following changes
bull in less than critical conditions vehicles can move forwards by a generic quantity dependent on the traffic density on the link
bull capability of simulating even complex signalized intersections bull apply dynamic shortest paths and follow different OD pairs in the network loading
process The extended cell transmission model has been selected as the most suitable
mathematical model to assess and calibrate real-time feedback signal control systems that use the relative link occupancy as control variable like Traffic Urban Control does [7]
23 Microscopic simulation of traffic flow
A microscopic simulation model aimed at reproducing the behavior and interaction of vehicles on road networks has been developed by the IASI [11] This microscopic simulator is able to manage different aspects of vehiclesrsquo dynamic that is acceleration and deceleration based on the car-following principles [6] and on the state of downstream signals lane changes and overtakes based on gap-acceptance rules and vehiclesrsquo paths Vehicles are generated according to the negative exponential distribution where the number of vehicles to be generated every minute can be time varying in order to simulate the variation of vehicular flows during the day
The system includes a graphic interface developed in the UNIX environment in C language with the public domain graphic libraries X11 The micro-simulation is animated on a reproduction of the road network where the signals and the vehicles are visualized
24 Dynamic traffic assignment model
Dynamic traffic assignment models are the most advanced modeling framework to simulate traffic patterns in congested urban networks as they can both simulate the flow progression along links and reproduce the complex interaction between traffic flow and route choice behavior of users
Several software packages for solving dynamic traffic assignment are now available Two of the most popular and advanced (Dynasmart [9] and Dynameq [8]) have been taken into consideration in this research and are object of a systematic comparison Both have been applied to a selected area of the road network of Roma having 51 centroids 300 nodes 870 links 70 signalized junctions (18 of which are under control) The figure below shows the study network as displayed by the two software packages
Figure 1 The study network in Dynameq (on the left) and Dynasmart (on the right)
Both models are simulation based but they differ as far as the modeling approach of
traffic flow (Dynameq assumes a fundamental triangular diagram Dynasmart a modified Greenshield model [11]) the route choice (two phases for Dynameq -a path generation phase in which one new path at each iteration is added until the maximum predefined number of paths is reached and a convergence phase in which no new paths are added- one
phase for Dynasmart which does not introduce any distinction between the generation phase and the convergence phase) the simulation process (Dynameq uses an event based procedure Dynasmart a macroparticle simulation model) convergence criterion (time based for Dynameq flow based for Dynasmart)
Thus Dynameq aims especially at providing a detailed representation of traffic flow by following a microsimulation approach It reproduces the traffic behavior at junction approaches by an explicit lane changing model and resolves conflicts at nodes by applying a gap acceptance rule It simulates pre-timed signal traffic control and ramp metering
On the other hand Dynasmart provides a simpler framework to model the traffic flow and aims rather at allowing simulating the impact of real-time strategies of traffic control and information systems (like actuated traffic signal ramp metering variable message signs and vehicle route guidance) on usersrsquo behavior
Even if the tests of the models are still in progress the following remarks can be made Comparison between static and dynamic assignment models shows that they provide not
so different patterns of traffic flows (R2=061) but as expected the static model overestimates the traffic flow as it assumes that the whole trip demand is assigned within a steady-state simulation period
Dynasmart and Dynameq predict very similar trends of the overall outflow of the network However their results are quite different as far as the route choice and consequently the traffic flow patterns
Finally simulation experiments highlight that a relevant issue of dynamic simulation assignment models is their capability to reproduce a temporary gridlock which is actually experienced on the network in the rush hour In fact if the dynamic assignment model is forced to prevent the gridlock the goodness-of-fit of simulated flow with respect to observed values decreases from R2=054 to R2=046
3 Signal Control strategies
The traditional approach to signal control assumes traffic pattern as given and signal parameters (cycle length green splits and offsets) as design variables However the combined problem of signal settings and traffic assignment generalizes the signal settings problem to concern the interaction between the control action and the usersrsquo reaction Usually it takes as design variables only green splits of signals at isolated junctions In the Global Optimization of Signal Settings Problem (Gossp) the whole system of signals is set to minimize an objective function that describe the global network performances In the Local Optimization of Signal Settings Problem (Lossp) flow-responsive signals are set independently each other either to minimize a local objective function or following a given criterion like equisaturation [29] or Po policy [25]
In the research project the usual approach is being extended in two directions taking into account signal synchronization and develop signal control strategies that can be suitably applied in real-time
31 Pre-timed synchronization
Signal synchronization of two-way arteries can be applied by following two different approaches -maximal bandwidth and minimum delay- although a solution procedure that applies the former problem to search for the solution of the latter one has been developed [23] Specifically it is well known that given the synchronization speed and the vector of distances between nodes the offsets that maximize the green bandwidth are univocally determined by the cycle length of the artery Such a property of the maximal bandwidth problem has been exploited to facilitate the search for a sub-optimal solution of the minimum delay problem Thus a linear search of the sub-optimal cycle length is first carried out starting from the minimum cycle length for the artery and then a local search is performed starting from the offset vector corresponding to that cycle length
The analytical model described in section 21 makes it possible a quick evaluation of the artery delay without involving any simulation The performances of the solutions obtained by applying the analytical model are then assessed by dynamic traffic assignment
Moreover two different strategies for one-way signal synchronization are also introduced in this paper The simplest strategy consists of starting the red of each node just after the end of the primary platoon (that is the platoon with the most number of vehicles) In the second strategy the red is checked to start after the end of the every platoon and the position giving the least delay is then selected
Preliminary tests conducted by carrying out a systematic analysis of the optimal offsets on an artery of Roma underline that the latter strategy outperforms the former one especially for large traffic flows Such an occurrence highlights that the performances of the artery are heavily affected by the complex process of platoon re-combination at nodes so that the strategy that favor the main platoon can be ineffective if it is stopped later while secondary platoons can run without being delayed
Numerical experiments concerning the analytical model have been carried out on Viale Regina Margherita a 6-node artery situated into the study network of Rome in the peak-off period In the first experiment the common cycle length of the artery has been set equal to the maximal cycle length of the junctions The green times have been adjusted consequently to keep the green splits unchanged Thus the offsets are the only control vector In the second experiment also the cycle length has been varied from the minimum cycle for the most critical junction of the artery (namely 32s) until its current value (1085s) As before the objective functions of the two problems are the maximal bandwidth and the minimum delay for the artery
The corresponding values of maximum bandwidth and sub-optimal minimum delay offsets are reported in Table 1 and Table 2 respectively
Offset of maximum bandwidth [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 149 195 242 288 335 381 428 474 1047 3 149 405 502 598 335 381 428 474 504 4 309 195 502 598 695 791 888 474 504 5 155 204 92 611 349 398 446 1005 526 6 177 233 29 34 400 455 511 56 65
Table 1 Offset of maximum bandwidth
Offset of minimum delay [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 319 395 452 108 125 641 768 944 17 3 159 55 452 598 45 381 428 474 475 4 289 195 262 378 125 591 648 474 505 5 185 414 272 611 350 398 446 845 851 6 197 323 49 34 430 545 631 76 59
Table 2 Sub-optimal offset of minimum delay
Figure 2 plots the value of delay at nodes along the artery for different values of the cycle length and the sub-optimal offsets The analytical delay model described in section 21 has been applied by assuming acceleration capabilities of vehicles and then allowing a platoon catching up the preceding one As expected the delay function is non convex The lowest value is obtained for a cycle length of 42s while other local minima are obtained for the cycle lengths of 72s and 102s
0
20
40
60
80
100
120
32 42 52 62 72 82 92 102
Cycle length [s]
Del
ay [s
veh
]
Figure 2 Estimation of node delay along the artery by the analytical traffic model for
different values of the cycle length
32 Actuated signal control based on logic programming
The traffic actuated strategies are constructed on the basis of the current configuration of the traffic flows or of the current number of vehicles at the controlled junctions Thus both the measurement of data and the elaborations aimed at identifying the traffic signal setting at each instant are carried out in real time
The literature proposes several control methods that use mathematical programming amongst others successful examples of adaptive systems are the SCOOT system [15] SCATS [18] UTOPIA [19] COP [14] New approaches have been recently proposed with the development of models based on fuzzy logic such [3] [17]
Traffic control based on logic programming have also recently appeared The method adopted in this paper described in [10] [11] and [12] is one of the first models and applications of this type It is an adaptive method actuated by vehicles that adopts logic programming to model and solve the decision problems associated with traffic control Such a method can be applied with success to urban intersections with high levels of traffic where many different and unpredictable events contribute to large fluctuations in the number of vehicles that use the intersection The logic programming methods based on vehicle counts make it possible to design the traffic control strategies with a high degree of simplicity and flexibility The system makes use of a very efficient logic programming solver the Leibniz System [28] that is capable of generating fast solution algorithms for the decision problems associated with traffic signal setting
This method has been applied to a system of two signalized and coordinated junctions in Roma Italy The junctions which are 180 meters apart and lay on a urban arterial road used to access and egress the city are characterized by high congestion peaks and flow conditions varying rapidly over time The schema of the study area is reported in Figure 3
In cooperation with the Mobility Agency of Rome a preliminary analysis of technical aspects signal plans traffic flows and congestion levels has been performed Some historic samples of traffic data have been therefore integrated with a data collection campaign with the use of temporary loop detectors Collected data have been used to calibrate and validate the simulation of the system with the micro simulator described in section 23
To take into account the problems related to the quantity and quality of available traffic data both incomplete and at an aggregate level this application required to integrate and refine the detected data with analytic processes based on mathematical traffic flow models To this end a suitable macroscopic model based on the simplified theory of kinematic waves [21] was developed to estimate the queue length of each stream at a given intersection as a function of vehicles counts taken at an upstream section
Figure 3 Scheme of the two junctions for the application of the signal control based
on logic programming
33 Real-time feedback network signal regulator
Real-time network traffic control strategies usually follow a hierarchical approach that optimizes cycle length green splits and offsets by evaluating their impacts on the network performances at different level of time and space aggregation
The Traffic Urban Control (TUC) model formulates the real-time traffic urban control system as a Linear-Quadratic (LQ) optimal control problem based on a store-and-forward type of mathematical modeling [7] The basic control objective is to minimize the risk of oversaturation and the spillback of link queues by suitably varying in a coordinated manner the green-phase durations of all stages at all network junctions around some nominal values
Via Fanella
Via Portuense
Via Affogalasino
Via del Trullo
suburbs city center
7
4
6
1
3
2
5
Loop detector connected both to the local regulator and to the central system
Loop detector connected only to the local regulator
Regulator
180 m
We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London
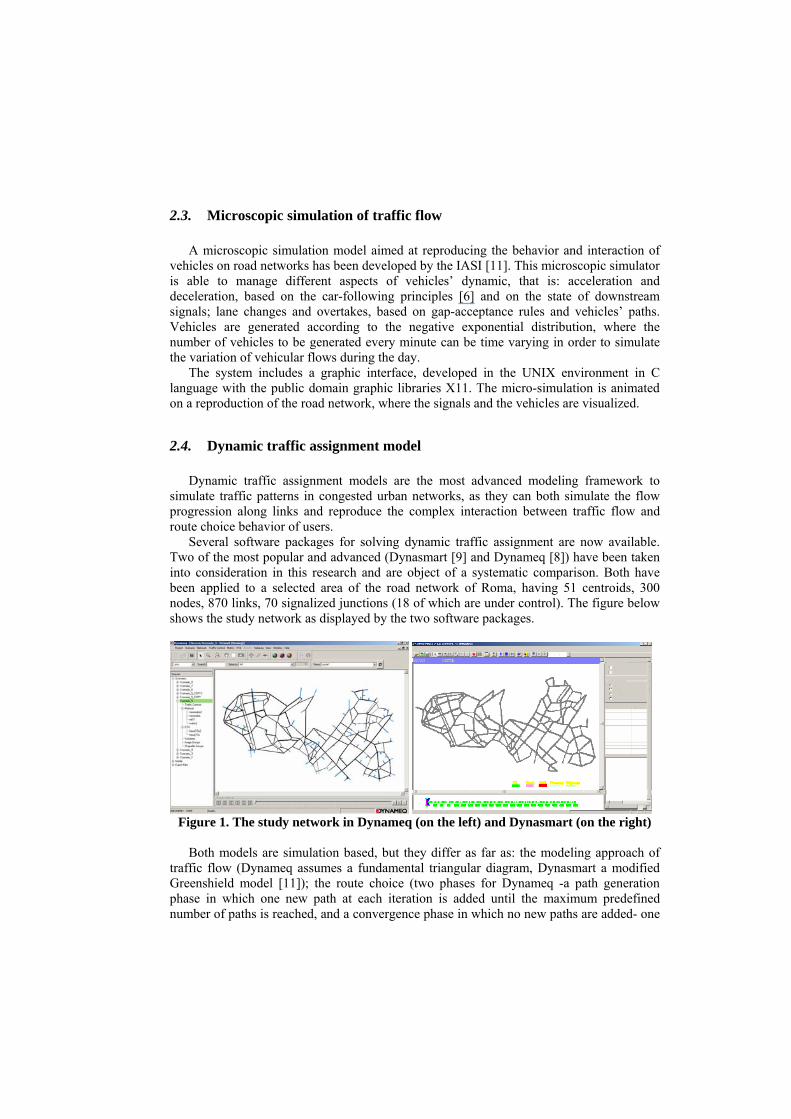
23 Microscopic simulation of traffic flow
A microscopic simulation model aimed at reproducing the behavior and interaction of vehicles on road networks has been developed by the IASI [11] This microscopic simulator is able to manage different aspects of vehiclesrsquo dynamic that is acceleration and deceleration based on the car-following principles [6] and on the state of downstream signals lane changes and overtakes based on gap-acceptance rules and vehiclesrsquo paths Vehicles are generated according to the negative exponential distribution where the number of vehicles to be generated every minute can be time varying in order to simulate the variation of vehicular flows during the day
The system includes a graphic interface developed in the UNIX environment in C language with the public domain graphic libraries X11 The micro-simulation is animated on a reproduction of the road network where the signals and the vehicles are visualized
24 Dynamic traffic assignment model
Dynamic traffic assignment models are the most advanced modeling framework to simulate traffic patterns in congested urban networks as they can both simulate the flow progression along links and reproduce the complex interaction between traffic flow and route choice behavior of users
Several software packages for solving dynamic traffic assignment are now available Two of the most popular and advanced (Dynasmart [9] and Dynameq [8]) have been taken into consideration in this research and are object of a systematic comparison Both have been applied to a selected area of the road network of Roma having 51 centroids 300 nodes 870 links 70 signalized junctions (18 of which are under control) The figure below shows the study network as displayed by the two software packages
Figure 1 The study network in Dynameq (on the left) and Dynasmart (on the right)
Both models are simulation based but they differ as far as the modeling approach of
traffic flow (Dynameq assumes a fundamental triangular diagram Dynasmart a modified Greenshield model [11]) the route choice (two phases for Dynameq -a path generation phase in which one new path at each iteration is added until the maximum predefined number of paths is reached and a convergence phase in which no new paths are added- one
phase for Dynasmart which does not introduce any distinction between the generation phase and the convergence phase) the simulation process (Dynameq uses an event based procedure Dynasmart a macroparticle simulation model) convergence criterion (time based for Dynameq flow based for Dynasmart)
Thus Dynameq aims especially at providing a detailed representation of traffic flow by following a microsimulation approach It reproduces the traffic behavior at junction approaches by an explicit lane changing model and resolves conflicts at nodes by applying a gap acceptance rule It simulates pre-timed signal traffic control and ramp metering
On the other hand Dynasmart provides a simpler framework to model the traffic flow and aims rather at allowing simulating the impact of real-time strategies of traffic control and information systems (like actuated traffic signal ramp metering variable message signs and vehicle route guidance) on usersrsquo behavior
Even if the tests of the models are still in progress the following remarks can be made Comparison between static and dynamic assignment models shows that they provide not
so different patterns of traffic flows (R2=061) but as expected the static model overestimates the traffic flow as it assumes that the whole trip demand is assigned within a steady-state simulation period
Dynasmart and Dynameq predict very similar trends of the overall outflow of the network However their results are quite different as far as the route choice and consequently the traffic flow patterns
Finally simulation experiments highlight that a relevant issue of dynamic simulation assignment models is their capability to reproduce a temporary gridlock which is actually experienced on the network in the rush hour In fact if the dynamic assignment model is forced to prevent the gridlock the goodness-of-fit of simulated flow with respect to observed values decreases from R2=054 to R2=046
3 Signal Control strategies
The traditional approach to signal control assumes traffic pattern as given and signal parameters (cycle length green splits and offsets) as design variables However the combined problem of signal settings and traffic assignment generalizes the signal settings problem to concern the interaction between the control action and the usersrsquo reaction Usually it takes as design variables only green splits of signals at isolated junctions In the Global Optimization of Signal Settings Problem (Gossp) the whole system of signals is set to minimize an objective function that describe the global network performances In the Local Optimization of Signal Settings Problem (Lossp) flow-responsive signals are set independently each other either to minimize a local objective function or following a given criterion like equisaturation [29] or Po policy [25]
In the research project the usual approach is being extended in two directions taking into account signal synchronization and develop signal control strategies that can be suitably applied in real-time
31 Pre-timed synchronization
Signal synchronization of two-way arteries can be applied by following two different approaches -maximal bandwidth and minimum delay- although a solution procedure that applies the former problem to search for the solution of the latter one has been developed [23] Specifically it is well known that given the synchronization speed and the vector of distances between nodes the offsets that maximize the green bandwidth are univocally determined by the cycle length of the artery Such a property of the maximal bandwidth problem has been exploited to facilitate the search for a sub-optimal solution of the minimum delay problem Thus a linear search of the sub-optimal cycle length is first carried out starting from the minimum cycle length for the artery and then a local search is performed starting from the offset vector corresponding to that cycle length
The analytical model described in section 21 makes it possible a quick evaluation of the artery delay without involving any simulation The performances of the solutions obtained by applying the analytical model are then assessed by dynamic traffic assignment
Moreover two different strategies for one-way signal synchronization are also introduced in this paper The simplest strategy consists of starting the red of each node just after the end of the primary platoon (that is the platoon with the most number of vehicles) In the second strategy the red is checked to start after the end of the every platoon and the position giving the least delay is then selected
Preliminary tests conducted by carrying out a systematic analysis of the optimal offsets on an artery of Roma underline that the latter strategy outperforms the former one especially for large traffic flows Such an occurrence highlights that the performances of the artery are heavily affected by the complex process of platoon re-combination at nodes so that the strategy that favor the main platoon can be ineffective if it is stopped later while secondary platoons can run without being delayed
Numerical experiments concerning the analytical model have been carried out on Viale Regina Margherita a 6-node artery situated into the study network of Rome in the peak-off period In the first experiment the common cycle length of the artery has been set equal to the maximal cycle length of the junctions The green times have been adjusted consequently to keep the green splits unchanged Thus the offsets are the only control vector In the second experiment also the cycle length has been varied from the minimum cycle for the most critical junction of the artery (namely 32s) until its current value (1085s) As before the objective functions of the two problems are the maximal bandwidth and the minimum delay for the artery
The corresponding values of maximum bandwidth and sub-optimal minimum delay offsets are reported in Table 1 and Table 2 respectively
Offset of maximum bandwidth [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 149 195 242 288 335 381 428 474 1047 3 149 405 502 598 335 381 428 474 504 4 309 195 502 598 695 791 888 474 504 5 155 204 92 611 349 398 446 1005 526 6 177 233 29 34 400 455 511 56 65
Table 1 Offset of maximum bandwidth
Offset of minimum delay [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 319 395 452 108 125 641 768 944 17 3 159 55 452 598 45 381 428 474 475 4 289 195 262 378 125 591 648 474 505 5 185 414 272 611 350 398 446 845 851 6 197 323 49 34 430 545 631 76 59
Table 2 Sub-optimal offset of minimum delay
Figure 2 plots the value of delay at nodes along the artery for different values of the cycle length and the sub-optimal offsets The analytical delay model described in section 21 has been applied by assuming acceleration capabilities of vehicles and then allowing a platoon catching up the preceding one As expected the delay function is non convex The lowest value is obtained for a cycle length of 42s while other local minima are obtained for the cycle lengths of 72s and 102s
0
20
40
60
80
100
120
32 42 52 62 72 82 92 102
Cycle length [s]
Del
ay [s
veh
]
Figure 2 Estimation of node delay along the artery by the analytical traffic model for
different values of the cycle length
32 Actuated signal control based on logic programming
The traffic actuated strategies are constructed on the basis of the current configuration of the traffic flows or of the current number of vehicles at the controlled junctions Thus both the measurement of data and the elaborations aimed at identifying the traffic signal setting at each instant are carried out in real time
The literature proposes several control methods that use mathematical programming amongst others successful examples of adaptive systems are the SCOOT system [15] SCATS [18] UTOPIA [19] COP [14] New approaches have been recently proposed with the development of models based on fuzzy logic such [3] [17]
Traffic control based on logic programming have also recently appeared The method adopted in this paper described in [10] [11] and [12] is one of the first models and applications of this type It is an adaptive method actuated by vehicles that adopts logic programming to model and solve the decision problems associated with traffic control Such a method can be applied with success to urban intersections with high levels of traffic where many different and unpredictable events contribute to large fluctuations in the number of vehicles that use the intersection The logic programming methods based on vehicle counts make it possible to design the traffic control strategies with a high degree of simplicity and flexibility The system makes use of a very efficient logic programming solver the Leibniz System [28] that is capable of generating fast solution algorithms for the decision problems associated with traffic signal setting
This method has been applied to a system of two signalized and coordinated junctions in Roma Italy The junctions which are 180 meters apart and lay on a urban arterial road used to access and egress the city are characterized by high congestion peaks and flow conditions varying rapidly over time The schema of the study area is reported in Figure 3
In cooperation with the Mobility Agency of Rome a preliminary analysis of technical aspects signal plans traffic flows and congestion levels has been performed Some historic samples of traffic data have been therefore integrated with a data collection campaign with the use of temporary loop detectors Collected data have been used to calibrate and validate the simulation of the system with the micro simulator described in section 23
To take into account the problems related to the quantity and quality of available traffic data both incomplete and at an aggregate level this application required to integrate and refine the detected data with analytic processes based on mathematical traffic flow models To this end a suitable macroscopic model based on the simplified theory of kinematic waves [21] was developed to estimate the queue length of each stream at a given intersection as a function of vehicles counts taken at an upstream section
Figure 3 Scheme of the two junctions for the application of the signal control based
on logic programming
33 Real-time feedback network signal regulator
Real-time network traffic control strategies usually follow a hierarchical approach that optimizes cycle length green splits and offsets by evaluating their impacts on the network performances at different level of time and space aggregation
The Traffic Urban Control (TUC) model formulates the real-time traffic urban control system as a Linear-Quadratic (LQ) optimal control problem based on a store-and-forward type of mathematical modeling [7] The basic control objective is to minimize the risk of oversaturation and the spillback of link queues by suitably varying in a coordinated manner the green-phase durations of all stages at all network junctions around some nominal values
Via Fanella
Via Portuense
Via Affogalasino
Via del Trullo
suburbs city center
7
4
6
1
3
2
5
Loop detector connected both to the local regulator and to the central system
Loop detector connected only to the local regulator
Regulator
180 m
We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

phase for Dynasmart which does not introduce any distinction between the generation phase and the convergence phase) the simulation process (Dynameq uses an event based procedure Dynasmart a macroparticle simulation model) convergence criterion (time based for Dynameq flow based for Dynasmart)
Thus Dynameq aims especially at providing a detailed representation of traffic flow by following a microsimulation approach It reproduces the traffic behavior at junction approaches by an explicit lane changing model and resolves conflicts at nodes by applying a gap acceptance rule It simulates pre-timed signal traffic control and ramp metering
On the other hand Dynasmart provides a simpler framework to model the traffic flow and aims rather at allowing simulating the impact of real-time strategies of traffic control and information systems (like actuated traffic signal ramp metering variable message signs and vehicle route guidance) on usersrsquo behavior
Even if the tests of the models are still in progress the following remarks can be made Comparison between static and dynamic assignment models shows that they provide not
so different patterns of traffic flows (R2=061) but as expected the static model overestimates the traffic flow as it assumes that the whole trip demand is assigned within a steady-state simulation period
Dynasmart and Dynameq predict very similar trends of the overall outflow of the network However their results are quite different as far as the route choice and consequently the traffic flow patterns
Finally simulation experiments highlight that a relevant issue of dynamic simulation assignment models is their capability to reproduce a temporary gridlock which is actually experienced on the network in the rush hour In fact if the dynamic assignment model is forced to prevent the gridlock the goodness-of-fit of simulated flow with respect to observed values decreases from R2=054 to R2=046
3 Signal Control strategies
The traditional approach to signal control assumes traffic pattern as given and signal parameters (cycle length green splits and offsets) as design variables However the combined problem of signal settings and traffic assignment generalizes the signal settings problem to concern the interaction between the control action and the usersrsquo reaction Usually it takes as design variables only green splits of signals at isolated junctions In the Global Optimization of Signal Settings Problem (Gossp) the whole system of signals is set to minimize an objective function that describe the global network performances In the Local Optimization of Signal Settings Problem (Lossp) flow-responsive signals are set independently each other either to minimize a local objective function or following a given criterion like equisaturation [29] or Po policy [25]
In the research project the usual approach is being extended in two directions taking into account signal synchronization and develop signal control strategies that can be suitably applied in real-time
31 Pre-timed synchronization
Signal synchronization of two-way arteries can be applied by following two different approaches -maximal bandwidth and minimum delay- although a solution procedure that applies the former problem to search for the solution of the latter one has been developed [23] Specifically it is well known that given the synchronization speed and the vector of distances between nodes the offsets that maximize the green bandwidth are univocally determined by the cycle length of the artery Such a property of the maximal bandwidth problem has been exploited to facilitate the search for a sub-optimal solution of the minimum delay problem Thus a linear search of the sub-optimal cycle length is first carried out starting from the minimum cycle length for the artery and then a local search is performed starting from the offset vector corresponding to that cycle length
The analytical model described in section 21 makes it possible a quick evaluation of the artery delay without involving any simulation The performances of the solutions obtained by applying the analytical model are then assessed by dynamic traffic assignment
Moreover two different strategies for one-way signal synchronization are also introduced in this paper The simplest strategy consists of starting the red of each node just after the end of the primary platoon (that is the platoon with the most number of vehicles) In the second strategy the red is checked to start after the end of the every platoon and the position giving the least delay is then selected
Preliminary tests conducted by carrying out a systematic analysis of the optimal offsets on an artery of Roma underline that the latter strategy outperforms the former one especially for large traffic flows Such an occurrence highlights that the performances of the artery are heavily affected by the complex process of platoon re-combination at nodes so that the strategy that favor the main platoon can be ineffective if it is stopped later while secondary platoons can run without being delayed
Numerical experiments concerning the analytical model have been carried out on Viale Regina Margherita a 6-node artery situated into the study network of Rome in the peak-off period In the first experiment the common cycle length of the artery has been set equal to the maximal cycle length of the junctions The green times have been adjusted consequently to keep the green splits unchanged Thus the offsets are the only control vector In the second experiment also the cycle length has been varied from the minimum cycle for the most critical junction of the artery (namely 32s) until its current value (1085s) As before the objective functions of the two problems are the maximal bandwidth and the minimum delay for the artery
The corresponding values of maximum bandwidth and sub-optimal minimum delay offsets are reported in Table 1 and Table 2 respectively
Offset of maximum bandwidth [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 149 195 242 288 335 381 428 474 1047 3 149 405 502 598 335 381 428 474 504 4 309 195 502 598 695 791 888 474 504 5 155 204 92 611 349 398 446 1005 526 6 177 233 29 34 400 455 511 56 65
Table 1 Offset of maximum bandwidth
Offset of minimum delay [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 319 395 452 108 125 641 768 944 17 3 159 55 452 598 45 381 428 474 475 4 289 195 262 378 125 591 648 474 505 5 185 414 272 611 350 398 446 845 851 6 197 323 49 34 430 545 631 76 59
Table 2 Sub-optimal offset of minimum delay
Figure 2 plots the value of delay at nodes along the artery for different values of the cycle length and the sub-optimal offsets The analytical delay model described in section 21 has been applied by assuming acceleration capabilities of vehicles and then allowing a platoon catching up the preceding one As expected the delay function is non convex The lowest value is obtained for a cycle length of 42s while other local minima are obtained for the cycle lengths of 72s and 102s
0
20
40
60
80
100
120
32 42 52 62 72 82 92 102
Cycle length [s]
Del
ay [s
veh
]
Figure 2 Estimation of node delay along the artery by the analytical traffic model for
different values of the cycle length
32 Actuated signal control based on logic programming
The traffic actuated strategies are constructed on the basis of the current configuration of the traffic flows or of the current number of vehicles at the controlled junctions Thus both the measurement of data and the elaborations aimed at identifying the traffic signal setting at each instant are carried out in real time
The literature proposes several control methods that use mathematical programming amongst others successful examples of adaptive systems are the SCOOT system [15] SCATS [18] UTOPIA [19] COP [14] New approaches have been recently proposed with the development of models based on fuzzy logic such [3] [17]
Traffic control based on logic programming have also recently appeared The method adopted in this paper described in [10] [11] and [12] is one of the first models and applications of this type It is an adaptive method actuated by vehicles that adopts logic programming to model and solve the decision problems associated with traffic control Such a method can be applied with success to urban intersections with high levels of traffic where many different and unpredictable events contribute to large fluctuations in the number of vehicles that use the intersection The logic programming methods based on vehicle counts make it possible to design the traffic control strategies with a high degree of simplicity and flexibility The system makes use of a very efficient logic programming solver the Leibniz System [28] that is capable of generating fast solution algorithms for the decision problems associated with traffic signal setting
This method has been applied to a system of two signalized and coordinated junctions in Roma Italy The junctions which are 180 meters apart and lay on a urban arterial road used to access and egress the city are characterized by high congestion peaks and flow conditions varying rapidly over time The schema of the study area is reported in Figure 3
In cooperation with the Mobility Agency of Rome a preliminary analysis of technical aspects signal plans traffic flows and congestion levels has been performed Some historic samples of traffic data have been therefore integrated with a data collection campaign with the use of temporary loop detectors Collected data have been used to calibrate and validate the simulation of the system with the micro simulator described in section 23
To take into account the problems related to the quantity and quality of available traffic data both incomplete and at an aggregate level this application required to integrate and refine the detected data with analytic processes based on mathematical traffic flow models To this end a suitable macroscopic model based on the simplified theory of kinematic waves [21] was developed to estimate the queue length of each stream at a given intersection as a function of vehicles counts taken at an upstream section
Figure 3 Scheme of the two junctions for the application of the signal control based
on logic programming
33 Real-time feedback network signal regulator
Real-time network traffic control strategies usually follow a hierarchical approach that optimizes cycle length green splits and offsets by evaluating their impacts on the network performances at different level of time and space aggregation
The Traffic Urban Control (TUC) model formulates the real-time traffic urban control system as a Linear-Quadratic (LQ) optimal control problem based on a store-and-forward type of mathematical modeling [7] The basic control objective is to minimize the risk of oversaturation and the spillback of link queues by suitably varying in a coordinated manner the green-phase durations of all stages at all network junctions around some nominal values
Via Fanella
Via Portuense
Via Affogalasino
Via del Trullo
suburbs city center
7
4
6
1
3
2
5
Loop detector connected both to the local regulator and to the central system
Loop detector connected only to the local regulator
Regulator
180 m
We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

31 Pre-timed synchronization
Signal synchronization of two-way arteries can be applied by following two different approaches -maximal bandwidth and minimum delay- although a solution procedure that applies the former problem to search for the solution of the latter one has been developed [23] Specifically it is well known that given the synchronization speed and the vector of distances between nodes the offsets that maximize the green bandwidth are univocally determined by the cycle length of the artery Such a property of the maximal bandwidth problem has been exploited to facilitate the search for a sub-optimal solution of the minimum delay problem Thus a linear search of the sub-optimal cycle length is first carried out starting from the minimum cycle length for the artery and then a local search is performed starting from the offset vector corresponding to that cycle length
The analytical model described in section 21 makes it possible a quick evaluation of the artery delay without involving any simulation The performances of the solutions obtained by applying the analytical model are then assessed by dynamic traffic assignment
Moreover two different strategies for one-way signal synchronization are also introduced in this paper The simplest strategy consists of starting the red of each node just after the end of the primary platoon (that is the platoon with the most number of vehicles) In the second strategy the red is checked to start after the end of the every platoon and the position giving the least delay is then selected
Preliminary tests conducted by carrying out a systematic analysis of the optimal offsets on an artery of Roma underline that the latter strategy outperforms the former one especially for large traffic flows Such an occurrence highlights that the performances of the artery are heavily affected by the complex process of platoon re-combination at nodes so that the strategy that favor the main platoon can be ineffective if it is stopped later while secondary platoons can run without being delayed
Numerical experiments concerning the analytical model have been carried out on Viale Regina Margherita a 6-node artery situated into the study network of Rome in the peak-off period In the first experiment the common cycle length of the artery has been set equal to the maximal cycle length of the junctions The green times have been adjusted consequently to keep the green splits unchanged Thus the offsets are the only control vector In the second experiment also the cycle length has been varied from the minimum cycle for the most critical junction of the artery (namely 32s) until its current value (1085s) As before the objective functions of the two problems are the maximal bandwidth and the minimum delay for the artery
The corresponding values of maximum bandwidth and sub-optimal minimum delay offsets are reported in Table 1 and Table 2 respectively
Offset of maximum bandwidth [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 149 195 242 288 335 381 428 474 1047 3 149 405 502 598 335 381 428 474 504 4 309 195 502 598 695 791 888 474 504 5 155 204 92 611 349 398 446 1005 526 6 177 233 29 34 400 455 511 56 65
Table 1 Offset of maximum bandwidth
Offset of minimum delay [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 319 395 452 108 125 641 768 944 17 3 159 55 452 598 45 381 428 474 475 4 289 195 262 378 125 591 648 474 505 5 185 414 272 611 350 398 446 845 851 6 197 323 49 34 430 545 631 76 59
Table 2 Sub-optimal offset of minimum delay
Figure 2 plots the value of delay at nodes along the artery for different values of the cycle length and the sub-optimal offsets The analytical delay model described in section 21 has been applied by assuming acceleration capabilities of vehicles and then allowing a platoon catching up the preceding one As expected the delay function is non convex The lowest value is obtained for a cycle length of 42s while other local minima are obtained for the cycle lengths of 72s and 102s
0
20
40
60
80
100
120
32 42 52 62 72 82 92 102
Cycle length [s]
Del
ay [s
veh
]
Figure 2 Estimation of node delay along the artery by the analytical traffic model for
different values of the cycle length
32 Actuated signal control based on logic programming
The traffic actuated strategies are constructed on the basis of the current configuration of the traffic flows or of the current number of vehicles at the controlled junctions Thus both the measurement of data and the elaborations aimed at identifying the traffic signal setting at each instant are carried out in real time
The literature proposes several control methods that use mathematical programming amongst others successful examples of adaptive systems are the SCOOT system [15] SCATS [18] UTOPIA [19] COP [14] New approaches have been recently proposed with the development of models based on fuzzy logic such [3] [17]
Traffic control based on logic programming have also recently appeared The method adopted in this paper described in [10] [11] and [12] is one of the first models and applications of this type It is an adaptive method actuated by vehicles that adopts logic programming to model and solve the decision problems associated with traffic control Such a method can be applied with success to urban intersections with high levels of traffic where many different and unpredictable events contribute to large fluctuations in the number of vehicles that use the intersection The logic programming methods based on vehicle counts make it possible to design the traffic control strategies with a high degree of simplicity and flexibility The system makes use of a very efficient logic programming solver the Leibniz System [28] that is capable of generating fast solution algorithms for the decision problems associated with traffic signal setting
This method has been applied to a system of two signalized and coordinated junctions in Roma Italy The junctions which are 180 meters apart and lay on a urban arterial road used to access and egress the city are characterized by high congestion peaks and flow conditions varying rapidly over time The schema of the study area is reported in Figure 3
In cooperation with the Mobility Agency of Rome a preliminary analysis of technical aspects signal plans traffic flows and congestion levels has been performed Some historic samples of traffic data have been therefore integrated with a data collection campaign with the use of temporary loop detectors Collected data have been used to calibrate and validate the simulation of the system with the micro simulator described in section 23
To take into account the problems related to the quantity and quality of available traffic data both incomplete and at an aggregate level this application required to integrate and refine the detected data with analytic processes based on mathematical traffic flow models To this end a suitable macroscopic model based on the simplified theory of kinematic waves [21] was developed to estimate the queue length of each stream at a given intersection as a function of vehicles counts taken at an upstream section
Figure 3 Scheme of the two junctions for the application of the signal control based
on logic programming
33 Real-time feedback network signal regulator
Real-time network traffic control strategies usually follow a hierarchical approach that optimizes cycle length green splits and offsets by evaluating their impacts on the network performances at different level of time and space aggregation
The Traffic Urban Control (TUC) model formulates the real-time traffic urban control system as a Linear-Quadratic (LQ) optimal control problem based on a store-and-forward type of mathematical modeling [7] The basic control objective is to minimize the risk of oversaturation and the spillback of link queues by suitably varying in a coordinated manner the green-phase durations of all stages at all network junctions around some nominal values
Via Fanella
Via Portuense
Via Affogalasino
Via del Trullo
suburbs city center
7
4
6
1
3
2
5
Loop detector connected both to the local regulator and to the central system
Loop detector connected only to the local regulator
Regulator
180 m
We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

Offset of maximum bandwidth [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 149 195 242 288 335 381 428 474 1047 3 149 405 502 598 335 381 428 474 504 4 309 195 502 598 695 791 888 474 504 5 155 204 92 611 349 398 446 1005 526 6 177 233 29 34 400 455 511 56 65
Table 1 Offset of maximum bandwidth
Offset of minimum delay [s] Cycle [s] Node N 32 42 52 62 72 82 92 102 1085
1 0 0 0 0 0 0 0 0 0 2 319 395 452 108 125 641 768 944 17 3 159 55 452 598 45 381 428 474 475 4 289 195 262 378 125 591 648 474 505 5 185 414 272 611 350 398 446 845 851 6 197 323 49 34 430 545 631 76 59
Table 2 Sub-optimal offset of minimum delay
Figure 2 plots the value of delay at nodes along the artery for different values of the cycle length and the sub-optimal offsets The analytical delay model described in section 21 has been applied by assuming acceleration capabilities of vehicles and then allowing a platoon catching up the preceding one As expected the delay function is non convex The lowest value is obtained for a cycle length of 42s while other local minima are obtained for the cycle lengths of 72s and 102s
0
20
40
60
80
100
120
32 42 52 62 72 82 92 102
Cycle length [s]
Del
ay [s
veh
]
Figure 2 Estimation of node delay along the artery by the analytical traffic model for
different values of the cycle length
32 Actuated signal control based on logic programming
The traffic actuated strategies are constructed on the basis of the current configuration of the traffic flows or of the current number of vehicles at the controlled junctions Thus both the measurement of data and the elaborations aimed at identifying the traffic signal setting at each instant are carried out in real time
The literature proposes several control methods that use mathematical programming amongst others successful examples of adaptive systems are the SCOOT system [15] SCATS [18] UTOPIA [19] COP [14] New approaches have been recently proposed with the development of models based on fuzzy logic such [3] [17]
Traffic control based on logic programming have also recently appeared The method adopted in this paper described in [10] [11] and [12] is one of the first models and applications of this type It is an adaptive method actuated by vehicles that adopts logic programming to model and solve the decision problems associated with traffic control Such a method can be applied with success to urban intersections with high levels of traffic where many different and unpredictable events contribute to large fluctuations in the number of vehicles that use the intersection The logic programming methods based on vehicle counts make it possible to design the traffic control strategies with a high degree of simplicity and flexibility The system makes use of a very efficient logic programming solver the Leibniz System [28] that is capable of generating fast solution algorithms for the decision problems associated with traffic signal setting
This method has been applied to a system of two signalized and coordinated junctions in Roma Italy The junctions which are 180 meters apart and lay on a urban arterial road used to access and egress the city are characterized by high congestion peaks and flow conditions varying rapidly over time The schema of the study area is reported in Figure 3
In cooperation with the Mobility Agency of Rome a preliminary analysis of technical aspects signal plans traffic flows and congestion levels has been performed Some historic samples of traffic data have been therefore integrated with a data collection campaign with the use of temporary loop detectors Collected data have been used to calibrate and validate the simulation of the system with the micro simulator described in section 23
To take into account the problems related to the quantity and quality of available traffic data both incomplete and at an aggregate level this application required to integrate and refine the detected data with analytic processes based on mathematical traffic flow models To this end a suitable macroscopic model based on the simplified theory of kinematic waves [21] was developed to estimate the queue length of each stream at a given intersection as a function of vehicles counts taken at an upstream section
Figure 3 Scheme of the two junctions for the application of the signal control based
on logic programming
33 Real-time feedback network signal regulator
Real-time network traffic control strategies usually follow a hierarchical approach that optimizes cycle length green splits and offsets by evaluating their impacts on the network performances at different level of time and space aggregation
The Traffic Urban Control (TUC) model formulates the real-time traffic urban control system as a Linear-Quadratic (LQ) optimal control problem based on a store-and-forward type of mathematical modeling [7] The basic control objective is to minimize the risk of oversaturation and the spillback of link queues by suitably varying in a coordinated manner the green-phase durations of all stages at all network junctions around some nominal values
Via Fanella
Via Portuense
Via Affogalasino
Via del Trullo
suburbs city center
7
4
6
1
3
2
5
Loop detector connected both to the local regulator and to the central system
Loop detector connected only to the local regulator
Regulator
180 m
We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

0
20
40
60
80
100
120
32 42 52 62 72 82 92 102
Cycle length [s]
Del
ay [s
veh
]
Figure 2 Estimation of node delay along the artery by the analytical traffic model for
different values of the cycle length
32 Actuated signal control based on logic programming
The traffic actuated strategies are constructed on the basis of the current configuration of the traffic flows or of the current number of vehicles at the controlled junctions Thus both the measurement of data and the elaborations aimed at identifying the traffic signal setting at each instant are carried out in real time
The literature proposes several control methods that use mathematical programming amongst others successful examples of adaptive systems are the SCOOT system [15] SCATS [18] UTOPIA [19] COP [14] New approaches have been recently proposed with the development of models based on fuzzy logic such [3] [17]
Traffic control based on logic programming have also recently appeared The method adopted in this paper described in [10] [11] and [12] is one of the first models and applications of this type It is an adaptive method actuated by vehicles that adopts logic programming to model and solve the decision problems associated with traffic control Such a method can be applied with success to urban intersections with high levels of traffic where many different and unpredictable events contribute to large fluctuations in the number of vehicles that use the intersection The logic programming methods based on vehicle counts make it possible to design the traffic control strategies with a high degree of simplicity and flexibility The system makes use of a very efficient logic programming solver the Leibniz System [28] that is capable of generating fast solution algorithms for the decision problems associated with traffic signal setting
This method has been applied to a system of two signalized and coordinated junctions in Roma Italy The junctions which are 180 meters apart and lay on a urban arterial road used to access and egress the city are characterized by high congestion peaks and flow conditions varying rapidly over time The schema of the study area is reported in Figure 3
In cooperation with the Mobility Agency of Rome a preliminary analysis of technical aspects signal plans traffic flows and congestion levels has been performed Some historic samples of traffic data have been therefore integrated with a data collection campaign with the use of temporary loop detectors Collected data have been used to calibrate and validate the simulation of the system with the micro simulator described in section 23
To take into account the problems related to the quantity and quality of available traffic data both incomplete and at an aggregate level this application required to integrate and refine the detected data with analytic processes based on mathematical traffic flow models To this end a suitable macroscopic model based on the simplified theory of kinematic waves [21] was developed to estimate the queue length of each stream at a given intersection as a function of vehicles counts taken at an upstream section
Figure 3 Scheme of the two junctions for the application of the signal control based
on logic programming
33 Real-time feedback network signal regulator
Real-time network traffic control strategies usually follow a hierarchical approach that optimizes cycle length green splits and offsets by evaluating their impacts on the network performances at different level of time and space aggregation
The Traffic Urban Control (TUC) model formulates the real-time traffic urban control system as a Linear-Quadratic (LQ) optimal control problem based on a store-and-forward type of mathematical modeling [7] The basic control objective is to minimize the risk of oversaturation and the spillback of link queues by suitably varying in a coordinated manner the green-phase durations of all stages at all network junctions around some nominal values
Via Fanella
Via Portuense
Via Affogalasino
Via del Trullo
suburbs city center
7
4
6
1
3
2
5
Loop detector connected both to the local regulator and to the central system
Loop detector connected only to the local regulator
Regulator
180 m
We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London
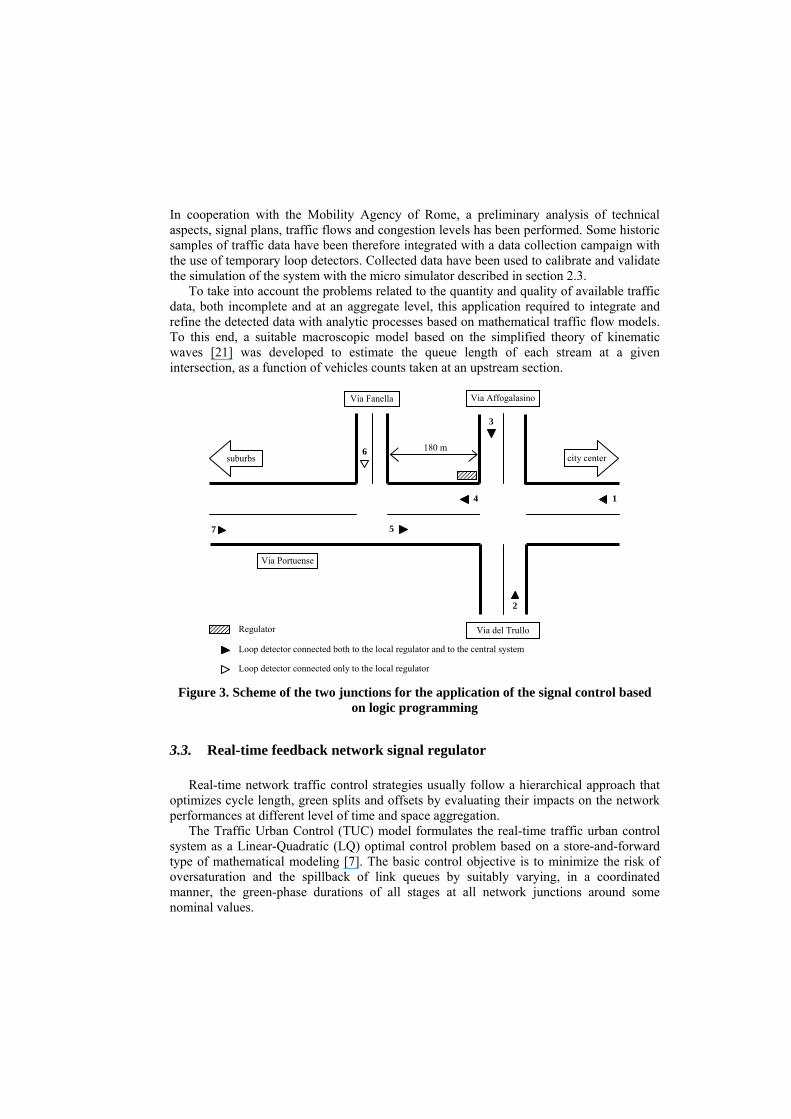
In cooperation with the Mobility Agency of Rome a preliminary analysis of technical aspects signal plans traffic flows and congestion levels has been performed Some historic samples of traffic data have been therefore integrated with a data collection campaign with the use of temporary loop detectors Collected data have been used to calibrate and validate the simulation of the system with the micro simulator described in section 23
To take into account the problems related to the quantity and quality of available traffic data both incomplete and at an aggregate level this application required to integrate and refine the detected data with analytic processes based on mathematical traffic flow models To this end a suitable macroscopic model based on the simplified theory of kinematic waves [21] was developed to estimate the queue length of each stream at a given intersection as a function of vehicles counts taken at an upstream section
Figure 3 Scheme of the two junctions for the application of the signal control based
on logic programming
33 Real-time feedback network signal regulator
Real-time network traffic control strategies usually follow a hierarchical approach that optimizes cycle length green splits and offsets by evaluating their impacts on the network performances at different level of time and space aggregation
The Traffic Urban Control (TUC) model formulates the real-time traffic urban control system as a Linear-Quadratic (LQ) optimal control problem based on a store-and-forward type of mathematical modeling [7] The basic control objective is to minimize the risk of oversaturation and the spillback of link queues by suitably varying in a coordinated manner the green-phase durations of all stages at all network junctions around some nominal values
Via Fanella
Via Portuense
Via Affogalasino
Via del Trullo
suburbs city center
7
4
6
1
3
2
5
Loop detector connected both to the local regulator and to the central system
Loop detector connected only to the local regulator
Regulator
180 m
We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

We are now aiming at exploiting the results obtained in [5] where at least one local minimum of the objective function of the global optimization of signal settings was found out and then can be assumed as a desired state of the network
We so extend the approach followed in TUC and we introduce a Linear-Quadratic regulator designed to control the distance to the desired state of the network and specifically the green split vector and traffic flow patterns that are solution of the global optimization of signal settings problem
The LQ optimal control can be then be formulated as follows ( ) ( )[ ]dd kk xxLgg minusminus= (1)
where the following notations are introduced g = green time vector (at time k) gd = desired green time vector (solution of static Goss problem) x = link flow vector (at time k) xd = link flow vector (solution of static Goss problem) L = gain matrix The generalized cell transmission model briefly described in section 23 has been
recognized as the most suitable approach for simulating such a real-time control strategy in the short-term However a wider analysis involving the long-term rerouting behavior of drivers and the en-route diversion of drivers which may occur when large increase of congestion is experienced on some links of the network necessarily requires the application of a dynamic equilibrium traffic assignment model It is worth noting that such diversions are taken by the control system as random disturbances of the process unless a real-time route guidance system exists that provides the drivers with updated information on the current or better on the future traffic conditions of the network
4 Signal control and dynamic assignment problems
The integration of signal control and dynamic assignment has a twofold goal On one hand we aim at assessing the effectiveness of the synchronization algorithm introduced in section 31 and on the other hand we aim at appraising the effect of signal control on usersrsquo route choice
In the first experiment the cycle length of 1085 seconds which better fits the current conditions is used and the corresponding suboptimal offset vector (last column of Table 2) has been applied in simulation to the artery
The equilibrium dynamic traffic assignment of the total off peak hour trip demand has been so carried out with Dynameq
Results reported in Table 3 show a significant reduction of delay on the artery (about 13) which is even more important if we consider that due to its improved performances the artery attracts 138 more traffic The total travel time on the whole network decreases as about 2 although the study area is much wider than the influence area of the artery and more important the objective function of the synchronization algorithm accounts only the travel time of the artery
Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

Current scenario Synchronization Difference Average arterial travel time
[s] 1765 1540 -127
Average total arterial travel length [vehkm] 414 471 +138
Average total network travel time [vehh] 876 855 -24
Table 3 Comparison of arterial and network results pre and post synchronization
A further investigation concerns the analytical traffic model used by the synchronization algorithm Two issues are here dealt with The first regards the capability of such a simple model to estimate the average travel time along the artery The second issue concerns the impact of the interaction between traffic control and driversrsquo route choice to the solution found As signals have been set by assuming the traffic flows as independent variables and the dynamic traffic assignment provided the dynamic equilibrium traffic flows on the artery the analytical delay model has been applied again by taking the average equilibrium traffic flows as input
The travel times on the artery computed by Dynameq and by the analytical model are compared in Figures 5 and 6
Although the analytical model is based on a much simpler theory that assumes stationary and homogeneous traffic flow the two models provide very similar results As far as the two assumptions considered in the analytical model namely the possibility or not that platoons can always catch-up each other the former provided a better correspondence with the microsimulation performed by Dynameq
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
1 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 4 Comparison between simulation and analytical model
(Arterial direction 1 Cycle length 1085 s)
80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

80
100
120
140
160
180
200
220
240
5 25 45 65 85 105 125 145 165Simulation interval [min]
Arte
rial t
rave
l tim
e di
rect
ion
2 [s Simulation
analytical model(with catchup)analytical model(without catchup)
Figure 5 Comparison between simulation and analytical model
(Arterial direction 2 Cycle length 1085 s)
However the differences between the two models become larger when shorter values of cycle are used In such cases the green is long just enough to allow the traffic flow being served Even a small random increase of traffic produces a temporary over-saturation and a relevant increase of delay which can not be predicted by a stationary model Indeed much larger differences have been recorded between the microsimulation and the well-known Webster model which has been applied to compute the delay at the lateral approaches Thus although the analytical model predicted that shorter cycle lengths would reduce delays on the artery the results obtained by the dynamic traffic assignment model indicate that even if the travel times along the artery improve the overall performances of the network are slightly worse
5 Conclusions and further developments
The research project ldquoInteraction between signal settings and traffic flow patterns on road networksrdquo aims at extending the global signal settings and traffic assignment problem to a more realistic dynamic context and at developing effective signal control strategies that lead the network performances to a stable desired state of traffic
Different approaches to model traffic flow are introduced and compared the analytical model of delay on a synchronized artery a generalized cell transmission model a microsimulation model Two dynamic traffic assignment models Dynasmart and Dynameq are applied to a real-size network
the two-way synchronization algorithm that applies the analytical delay model to carry out a linear search of the minimum delay solution which revealed to be effective in
reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

reducing the travel times along a synchronized artery even if moreover the traffic flow on the artery increased as it became more convenient
Current research concerns a Linear-Quadratic regulator designed to keep signals settings and traffic flows stably near a desired state namely the solution of the global optimization of signal settings problem
References
[1] Abdelfatah AS Mahmassani H (1998) System optimal time-dependent path assignment and signal timing in traffic networks paper presented at the 77th Annual Meeting of Transportation Research Board
[2] Abdelghany K Valdes D Abdelfatah A and Mahmassani H (1999) Real-time traffic assignment and path-based signal coordination application to network traffic management 78th Annual Meeting of Transportation Research Board Washington January 1999
[3] Bingham E (2001) Reinforcement learning in neurofuzzy traffic signal control European Journal of Operational Research 131 232ndash241
[4] Cantarella GE Improta and G Sforza A (1991) Road network signal setting equilibrium conditions In Papageorgiou M (Ed) Concise Encyclopedia of Traffic and Transportation Systems Pergamon Press pp 366ndash371
[5] Cipriani E Fusco G (2004) Combined Signal Setting Design and Traffic Assignment Problem European Journal of Operational Research 155 569ndash583
[6] Daganzo CF (1997) Fundamentals of transportation and traffic operations Pergamon Great Britain 147-156
[7] Dinopoulou V C Diakaki and M Papageorgiou (2002) Applications of the urban traffic control strategy TUC Proceedings of the 9th Meeting of the EURO Working Group on Transportation Bari Italy 2002 pp 366-371
[8] Dynameq userrsquos manual ndash Release 11 November 2005
[9] Dynasmart-P Version 10 Userrsquos Guide September 2004
[10] Felici G Rinaldi G Sforza A Truemper K (1995) Traffic control a logic programming approach and a real application Ricerca Operativa 30 39-60
[11] Felici G Rinaldi G Sforza A Truemper K (2002) A methodology for traffic signal control based on logic programming IASI-CNR Report n 581 ISSN 1128-3378
[12] Felici G Sforza A Rinaldi G Truemper K (2006) A logic programming based approach for online traffic control To appear on Transportation Research C available online at wwwsciencedirectcom
[13] Ghali MO and Smith MJ (1995) A model for the dyamic system optimum traffic assignment problem TranspRes-B Vol28B pp155-17
[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

[14] Head KL Mirchandani PB and Sheppard D (1992) Hierarchical framework for real time traffic control Transportation Research Record 1324 82-88
[15] Hunt PB Robertson DI Bretherton RD and Winton R (1981) SCOOT - A traffic responsive method of coordinating signals Transportation and Road Research Laboratory Report LR 1014 Crwothorne Berkshire England
[16] Jayakrishnan R Hu T Mahmassani H S An evaluation tool for advanced traffic information and management systems in urban networks Transportation Research-C 2(3)129-147 May 1994
[17] Kosonen I (2003) Multi-agent fuzzy signal control based on real-time simulation Transportation Research C 11 389-403
[18] Luk JYK (1984) Two Traffic Responsive Area Traffic Control Methods SCAT and SCOOT Traffic Engineering and Control 30 14-20
[19] Mauro V Di Taranto D (1990) UTOPIA Proceedings of the 6th IFAC IFIP IFORS Symposium on Control Computers and Communication in Transportation Paris France 1990
[20] Mirchandany P Head L (2001) A real-time traffic signal control system architecture algorithms analysis Transportation Research C 9 415-432
[21] Newell GF (1993) A simplified theory of kinematic waves in highway traffic part I general theory part II queuing at freeway bottlenecks part III multi-destination flows Transportation Research B 27 281-313
[22] Niittymaki J Turunen E (2003) Traffic signal control on similarity logic reasoning Fuzzy Sets and Systems 133 109-131
[23] Papola N and Fusco G (1998) Maximal Bandwidth Problems a New Algorithm Based on the Properties of Periodicity of the System Transportation Research-Part B 32(4) pp277-288
[24] Papola N and Fusco G (2000b) A new analytical model for traffic signal synchronization Proceedings of 2nd ICTTS Conference Beijing China 31 July-2 August 2000
[25] Smith MJ (1980) A local traffic control policy which automatically maximises the overall travel capacity of an urban road network Traffic Eng Control pp298-302
[26] Smith MJ and Ghali MO (1990) Traffic assignment traffic control and road pricing In CDaganzo (ed) Proc of the 12th International Symposium on Transportation and Traffic Theory pp147-170 New York Elsevier
[27] Taale H and van Zuylen HJ (2001) The combined traffic assignment and control problemndashndashan overview of 25 years of research In 9th World Conference on Transport Research Seoul Chorea July 22ndash27
[28] Truemper K (1998) Effective Logic Computation Wiley-Interscience Pub New York
[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London

[29] Webster (1958) Traffic signal settings Road research technical paper no 39 HMSO London