Instrumentación y Control Introducción
28
Instrumentación y Control Introducción
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of Instrumentación y Control Introducción
Instrumentación y Control
Introducción
Sistemas de Control
❚ IntroducciónControl ??
❚ Sistemas de Control: Control de Procesos Servomecanismos
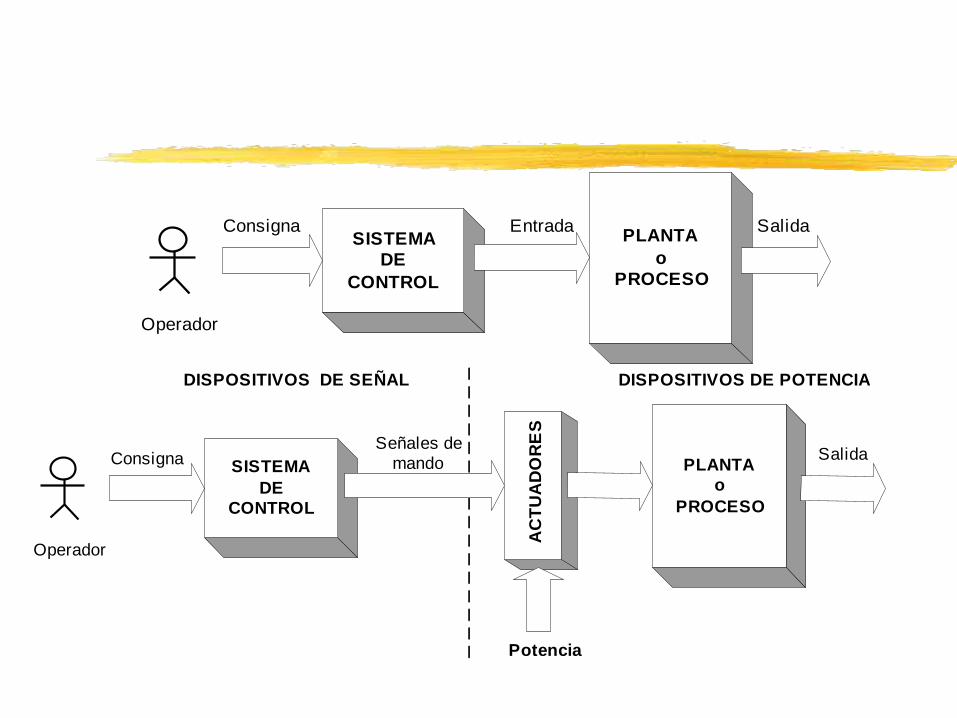
Operador
SISTEMADE
CONTROL
PLANTAo
PROCESO
Consigna Entrada Salida
Operador
SISTEMADE
CONTROL
PLANTAo
PROCESO
ConsignaSeñales de
mando Salida
Potencia
AC
TU
AD
OR
ES
DISPOSITIVOS DE SEÑAL DISPOSITIVOS DE POTENCIA
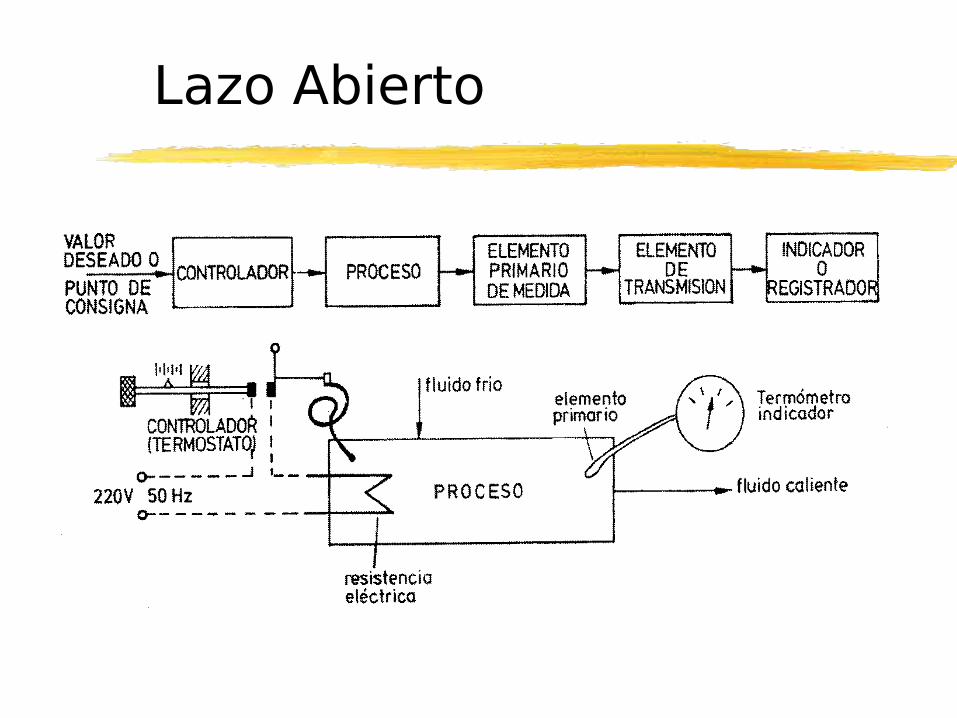
Lazo Abierto
Diagrama de bloques de un control de procesos
❚ Identificación de elementosProcesoMediciónDetector de errorControladorElemento de control
❚ Diagrama de bloques
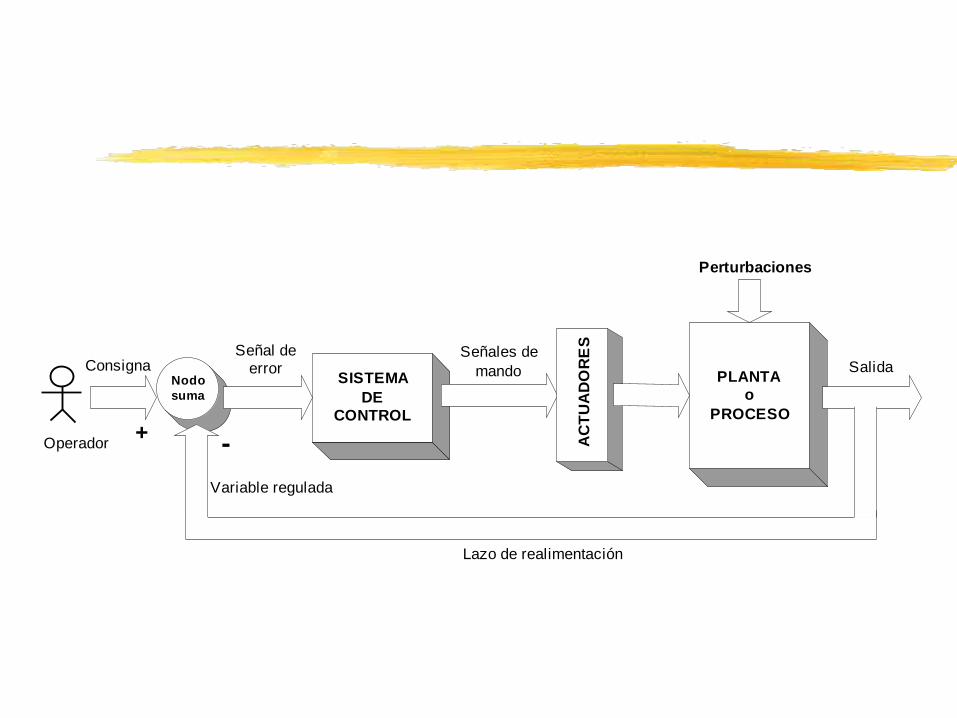
Operador
SISTEMADE
CONTROL
PLANTAo
PROCESO
ConsignaSeñales de
mando
Perturbaciones
AC
TU
AD
OR
ES
Nodosuma
+ -
Señal deerror
Variable regulada
Lazo de realimentación
Salida
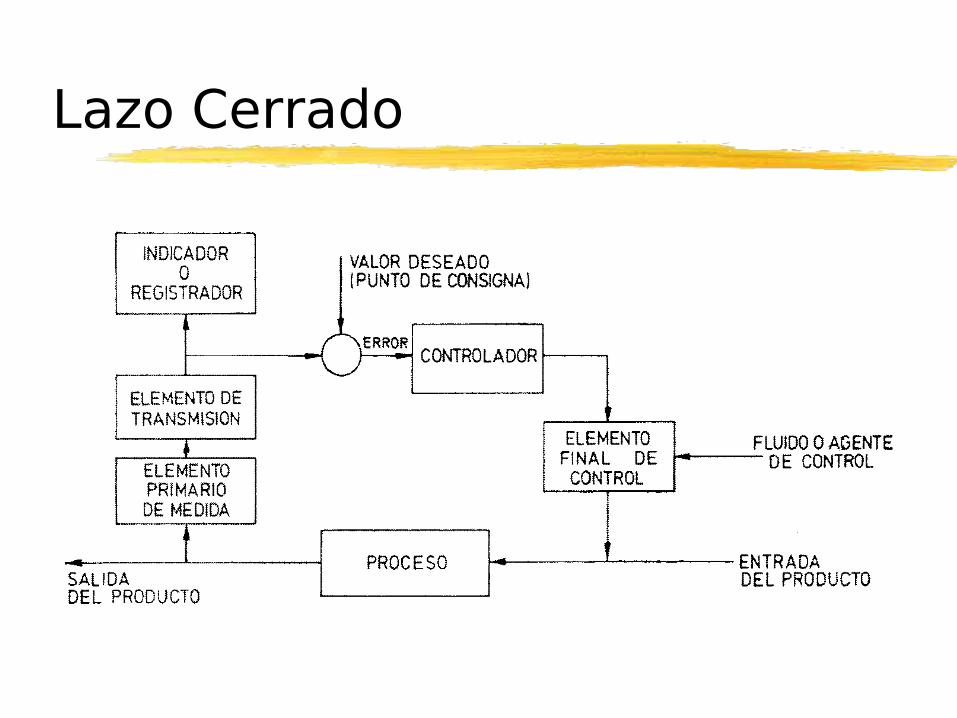
Lazo Cerrado

Lazo Cerrado (cont.)
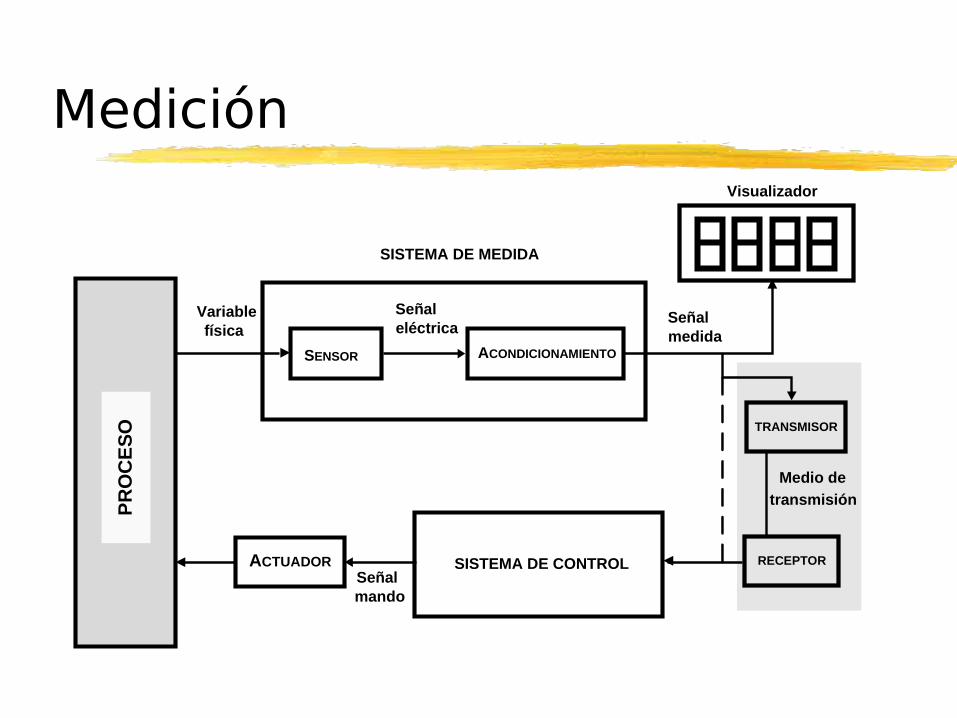
MediciónP
RO
CE
SO
SISTEMA DE CONTROL
Visualizador
SENSOR ACONDICIONAMIENTO
ACTUADOR
TRANSMISOR
RECEPTOR
Señaleléctrica
Variablefísica
Señalmedida
Señalmando
Medio de
transmisión
SISTEMA DE MEDIDA
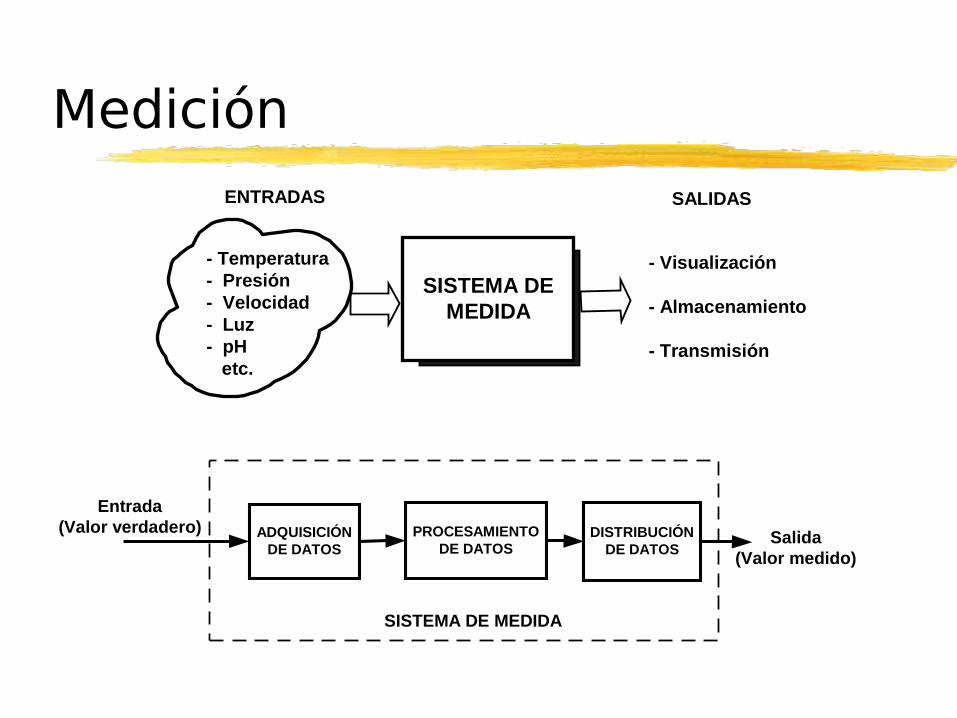
Medición
text
ADQUISICIÓNDE DATOS
PROCESAMIENTODE DATOS
DISTRIBUCIÓNDE DATOS
SISTEMA DE MEDIDA
Entrada(Valor verdadero)
Salida(Valor medido)
SISTEMA DEMEDIDA
- Temperatura - Presión - Velocidad - Luz - pH etc.
- Visualización
- Almacenamiento
- Transmisión
ENTRADAS SALIDAS
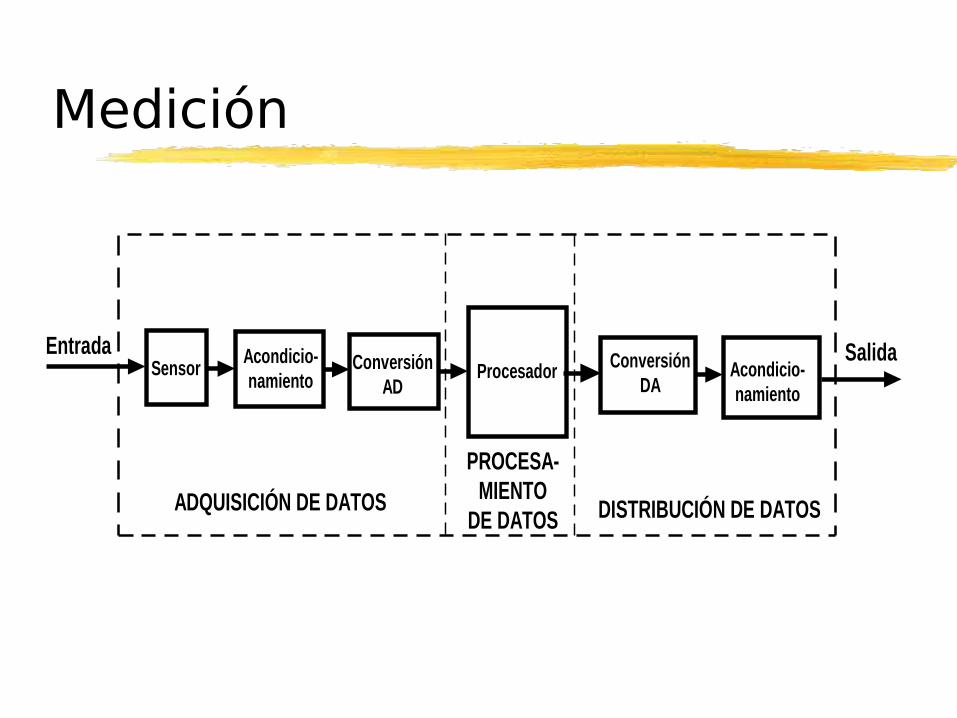
Medición
Procesador
ADQUISICIÓN DE DATOS
PROCESA-MIENTO
DE DATOS DISTRIBUCIÓN DE DATOS
Entrada SalidaSensor
Acondicio-namiento
Acondicio-namiento
ConversiónAD
ConversiónDA

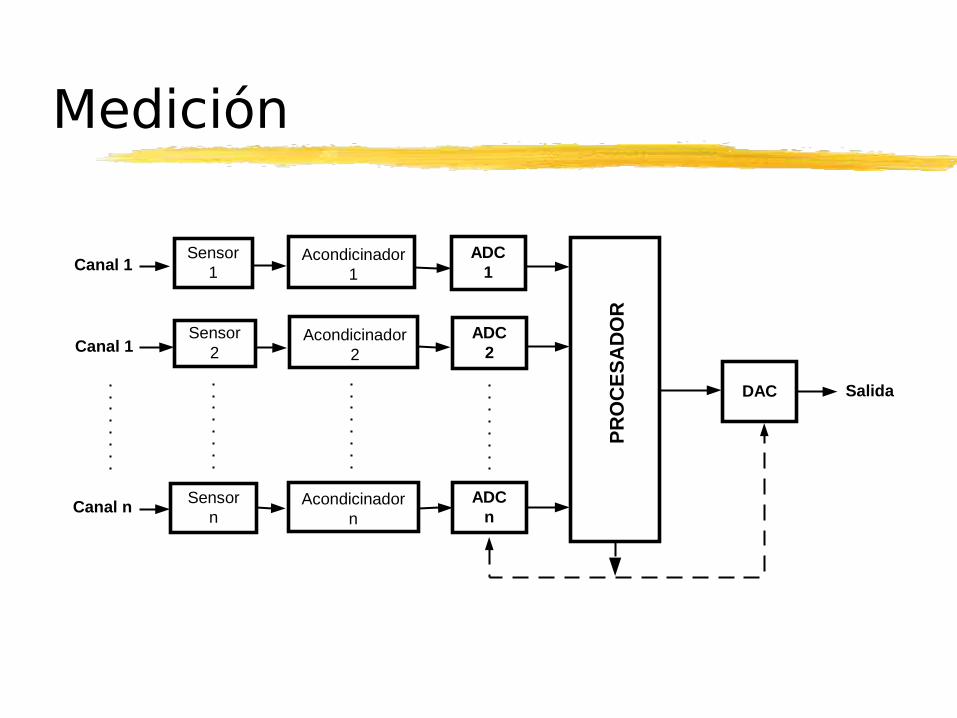
Medición
Sensor1
ADCProce-sador
DAC
MU
LT
IPL
EX
OR
AN
AL
ÓG
ICO
Canal 1
Salida
Acondicinador1
Sensor2Canal 1
Acondicinador2
Sensorn
Canal n Acondicinadorn
Medición
Sensor1
DAC
PR
OC
ES
AD
OR
Canal 1
Salida
Acondicinador1
Sensor2Canal 1
Acondicinador2
Sensorn
Canal n Acondicinadorn
ADC1
ADC2
ADCn
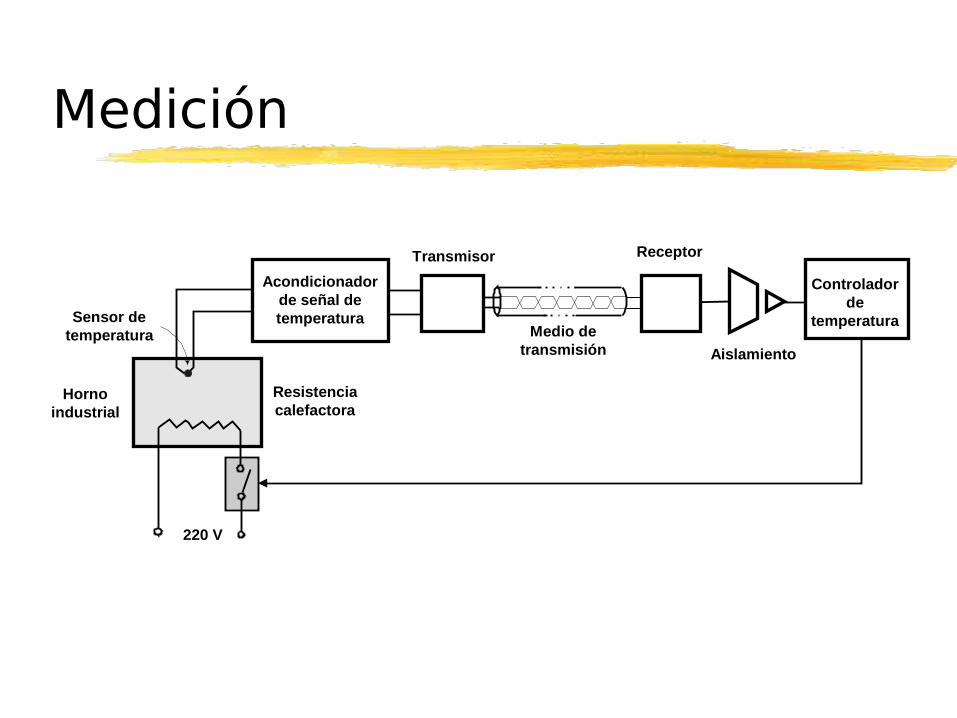
Medición
Acondicionadorde señal detemperatura
Medio detransmisión
Sensor detemperatura
Hornoindustrial
Aislamiento
Controladorde
temperatura
Transmisor Receptor
Resistenciacalefactora
220 V
Evaluación del sistema de control
❚ Estabilidad, ❚ Regulación de estado estacionario, ❚ Regulación transitoria, ❚ Criterios de evaluación.
Respuesta amortiguadaRespuesta oscilatoria

Procesamiento analógico y digital
❚ Representación de datos, ❚ Control ON-OFF, ❚ Control analógico, ❚ Control digital,
SupervisorDirecto
❚ PLCs.
Instrumentos
❚ Ciegos: alarmas, transmisores ..❚ Indicadores: analógicos, digitales ..❚ Registradores❚ Sensores: elemento primario❚ Transmisores❚ Transductores, Convertidores❚ Receptores, Controladores
Términos
❚ Intervalo de medida (range)❚ Dinámica de medida o rangeabilidad
(rangeability)❚ Alcance (span)❚ Error
❙ Estático, dinámico, medio, absoluto, relativo❚ Incertidumbre de la medida (uncertainty)❚ Exactitud (accuracy)❚ Precisión❚ Zona muerta (dead band o dead zone)❚ Sensibilidad (sensitivity)❚ Repetibilidad (repetibility)
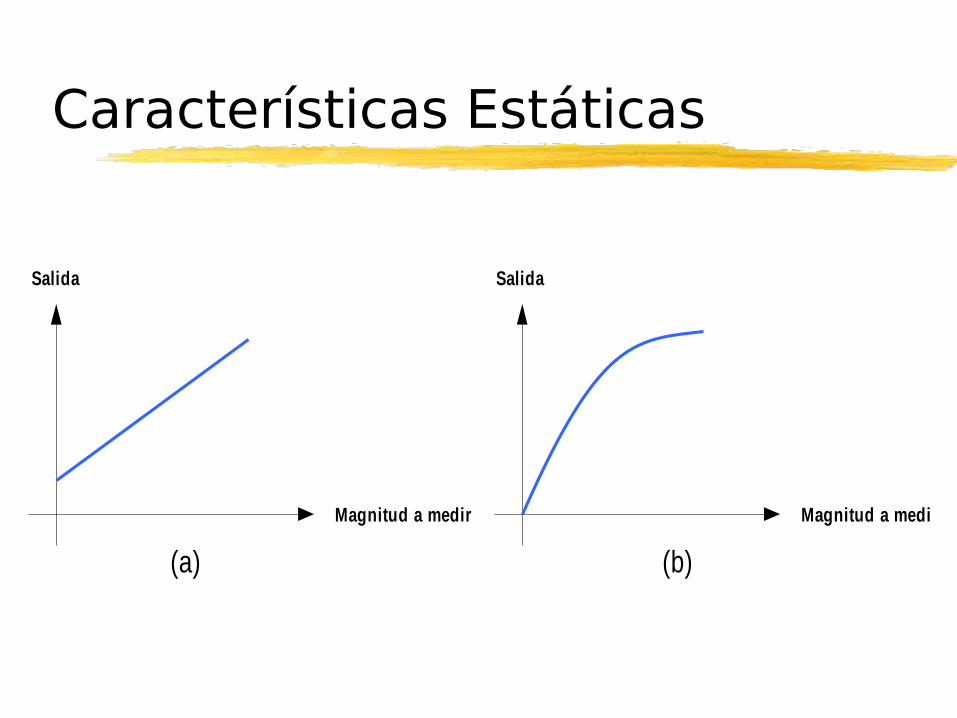
Características Estáticas
Salida
Magnitud a medir
Salida
Magnitud a medir
(a) (b)

Características Estáticas
Salida,Y
YS
YI
Salida a fondode escala
YS-Y
I
Campo de medidaAlcance=X
S-X
I
XI
límiteinferior
Xslímite
superior
Magnitud a medir, X

No Linealidad
Salida
Magnitud,X
XSXI
Curva real
Curvalinealizada
h2
Salida
Magnitud,X
XSXI
Curva real
Curvalinealizada
Desviaciónmáxima
(a) (b)
h1
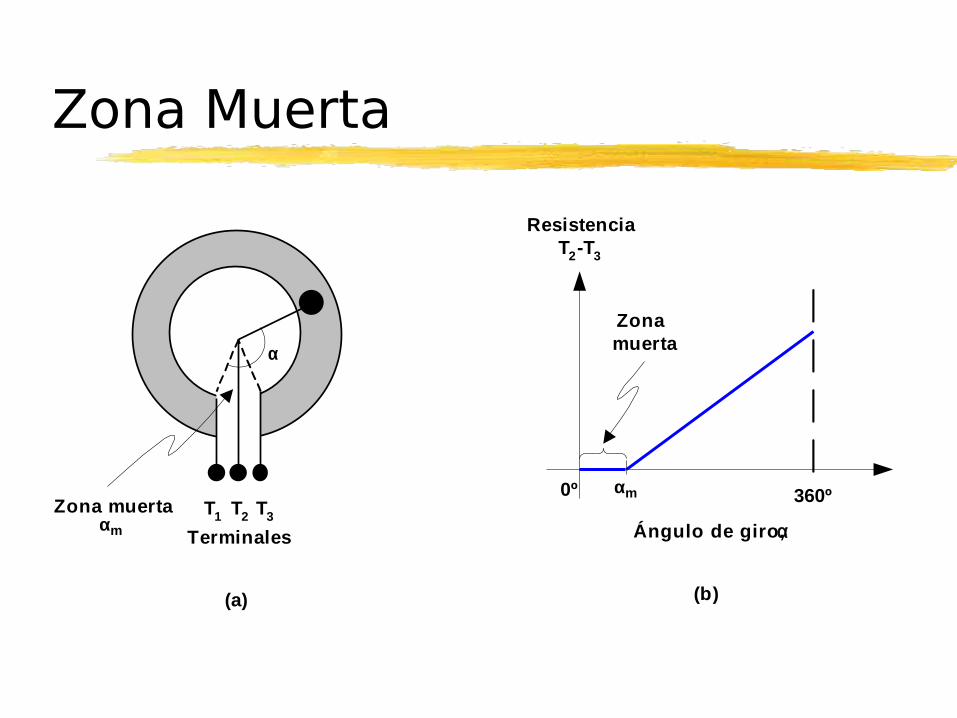
Zona Muerta
ResistenciaT2-T3
360º0º
Zona muerta
Zona muertamα
Terminales
T1 T2 T3
α
(a) (b)
Ángulo de giro, α
mα
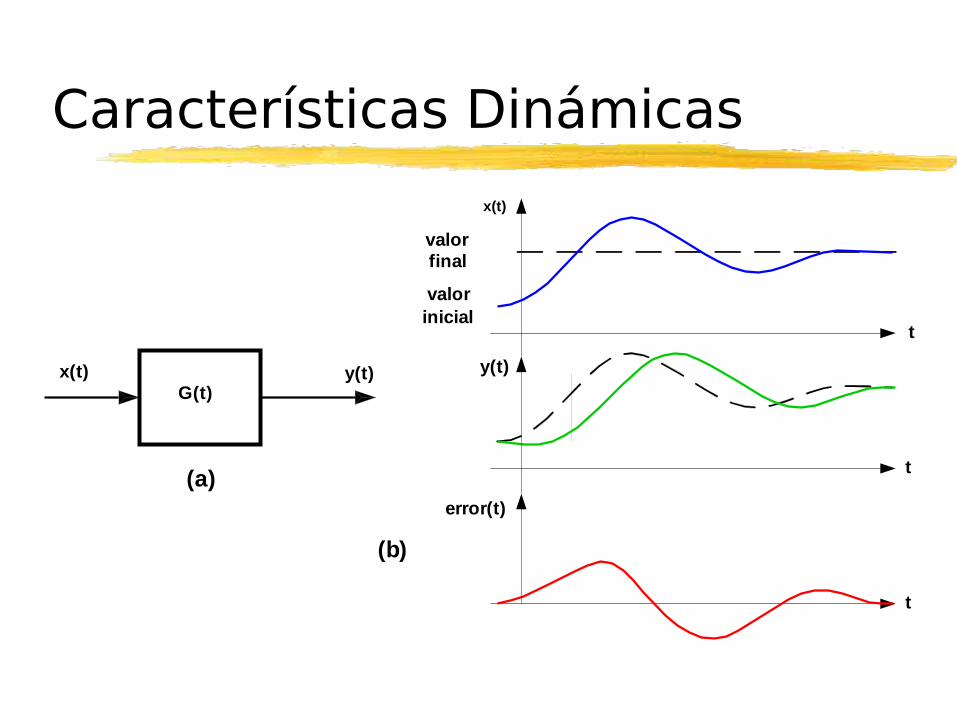
Características Dinámicas
y(t)G(t)
(a)
(b)
x(t)
valorfinal
valorinicial
y(t)
error(t)
t
t
t
x(t)

Características Dinámicas
x(t)
y(t)
(a) (b)
x(t)
y(t)
retraso VALOR“EXACTO”
VALOR“EXACTO”
t
t t
t

Características Dinámicas
t
t
t
t
t
t
t
t
t t
f f
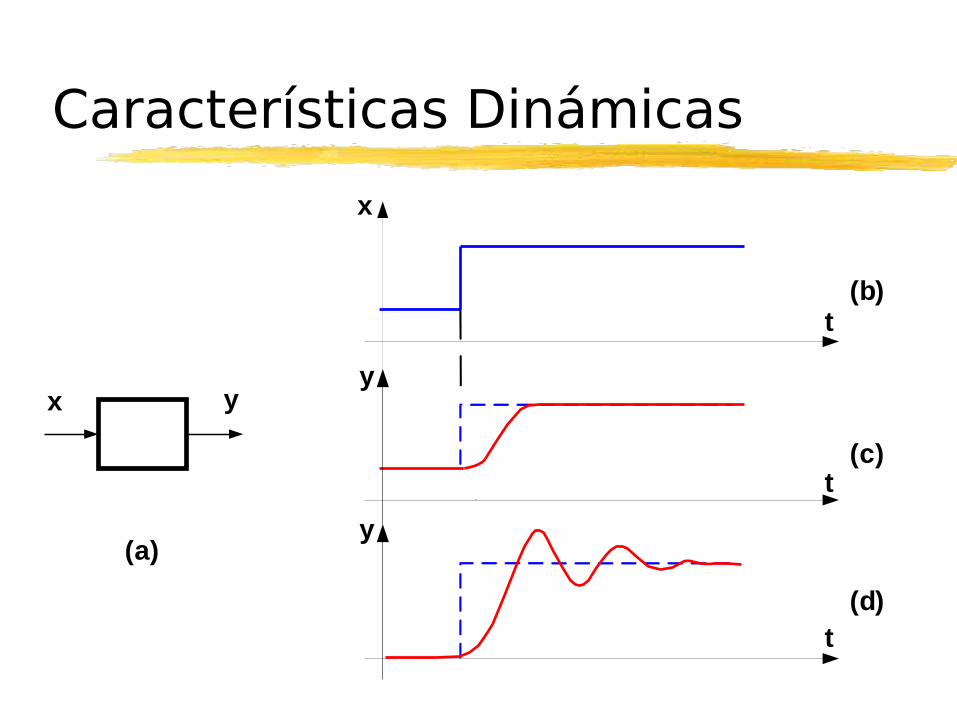
Características Dinámicas
(a)
x y
x
y
y
(b)
(c)
(d)
t
t
t
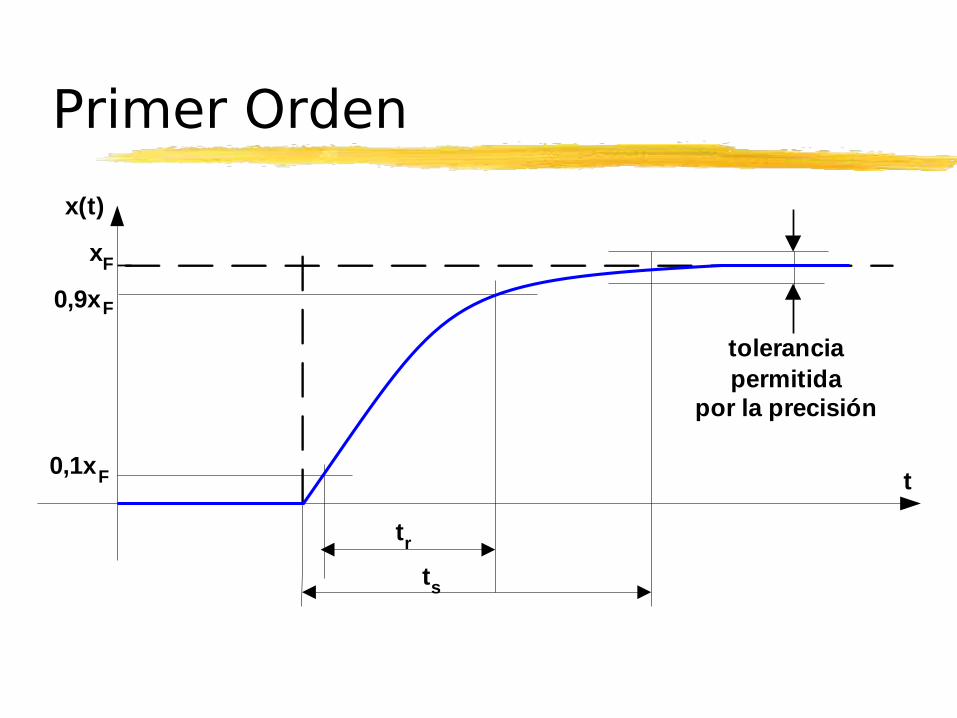
Primer Orden
toleranciapermitida
por la precisión
t
ts
tr
x(t)
xF
0,9xF
0,1xF
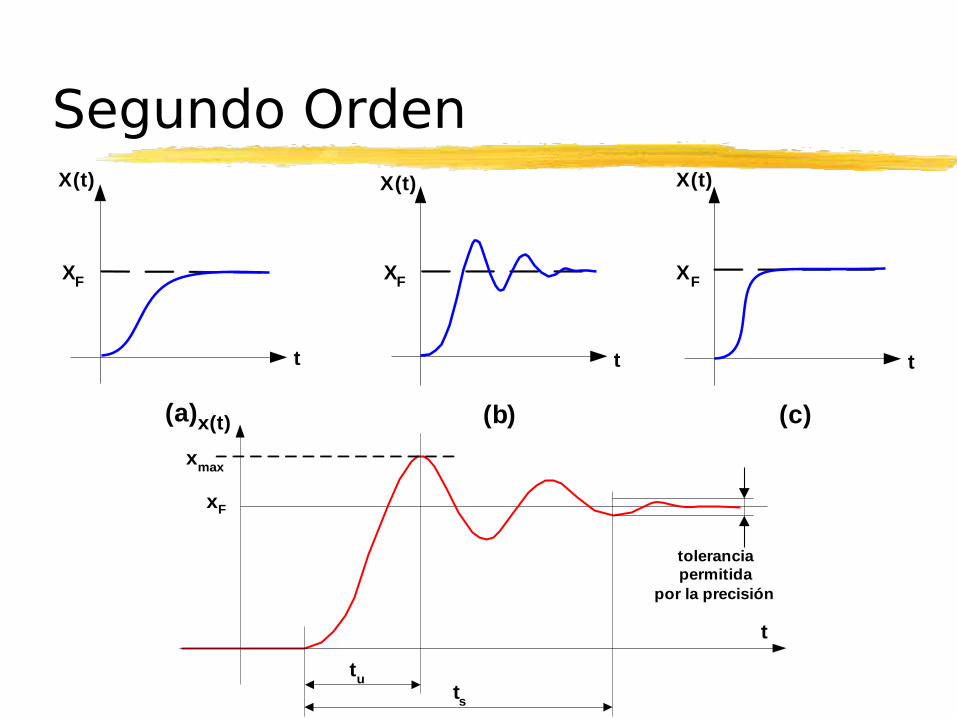
Segundo OrdenX(t)
t
(a) (c)
t
XF
(b)
t
X(t) X(t)
XF XF
toleranciapermitida
por la precisión
t
ts
tu
x(t)
xF
xmax