ILA-2: AN INDUCTIVE LEARNING ALGORITHM FOR KNOWLEDGE DISCOVERY
34
ILA-2: An Inductive Learning Algorithm for Knowledge Discovery Mehmet R. Tolun (*) Hayri Sever Department of Computer Engineering Department of Computer Science Eastern Mediterranean University Hacettepe University Gazimagusa, T.R.N.C. Beytepe – Ankara Turkey Turkey 06530 {[email protected]} {[email protected]} Mahmut 8OXGD÷ Saleh M. Abu-Soud Information Security Research Institute Department of Computer Science 7h%ø7$.8(.$( Princess Sumaya University College for Technology PK 21 Gebze Kocaeli P.O. Box 925819 Turkey 41470 Amman - Jordan 11110 {[email protected]} {[email protected]} (*) Corresponding author Running Title: ILA-2: An Inductive Learning Algorithm This research is partly supported by the State Planning Organization of the Turkish Republic under the research grant 97-K-12330. All of the data sets were obtained from the University of California-Irvine’s repository of machine learning databases and domain theories, managed by Patrick M. Murphy. We acknowledge Ross Quinlan and Peter Clark for the implementations of C4.5 and CN2 and also Ron Kohavi, for we have used MLC++ library to execute OC1, CN2, and ID3 algorithms.
Transcript of ILA-2: AN INDUCTIVE LEARNING ALGORITHM FOR KNOWLEDGE DISCOVERY

ILA-2: An Inductive Learning Algorithm for Knowledge Discovery
Mehmet R. Tolun (*) Hayri Sever
Department of Computer Engineering Department of Computer Science
Eastern Mediterranean University Hacettepe University
Gazimagusa, T.R.N.C. Beytepe – Ankara
Turkey Turkey 06530
{[email protected]} {[email protected]}
Mahmut 8OXGD÷ Saleh M. Abu-Soud
Information Security Research Institute Department of Computer Science
7h%ø7$.�8(.$( Princess Sumaya University College for Technology
PK 21 Gebze Kocaeli P.O. Box 925819
Turkey 41470 Amman - Jordan 11110
{[email protected]} {[email protected]}
(*) Corresponding author
Running Title: ILA-2: An Inductive Learning Algorithm
This research is partly supported by the State Planning Organization of the Turkish Republic under the research
grant 97-K-12330. All of the data sets were obtained from the University of California-Irvine’s repository of
machine learning databases and domain theories, managed by Patrick M. Murphy. We acknowledge Ross
Quinlan and Peter Clark for the implementations of C4.5 and CN2 and also Ron Kohavi, for we have used
MLC++ library to execute OC1, CN2, and ID3 algorithms.

ILA-2: An Inductive Learning Algorithm 2
Abstract
In this paper we describe the ILA-2 rule induction algorithm which is the improved version of a novel
inductive learning algorithm, ILA. We first outline the basic algorithm ILA, and then present how the
algorithm is improved using a new evaluation metric that handles uncertainty in the data. By using a
new soft computing metric, users can reflect their preferences through a penalty factor to control the
performance of the algorithm. ILA has also a faster pass criteria feature which reduces the processing
time without sacrificing much from the accuracy that is not available in basic ILA.
We experimentally show that the performance of ILA-2 is comparable to that of well-known inductive
learning algorithms, namely CN2, OC1, ID3 and C4.5.
Keywords: Data Mining, Knowledge Discovery, Machine Learning, Inductive Learning, Rule Induction.
1. Introduction
A knowledge discovery process involves extracting valid, previously unknown, potentially
useful, and comprehensible patterns from large databases. As described in (Fayyad, 1996;
Simoudis, 1996), this process is typically made up of selection and sampling, preprocessing
and cleaning, transformation and reduction, data mining, and evaluation steps. The first step in
data-mining process is to select a target data set from a database and to possibly sample the
target data. The preprocessing and data cleaning step handles noise and unknown values as
well as accounting for missing data fields, time sequence information, and so forth. The data
reduction and transformation involves finding relevant features depending on the goal of the
task and certain transformations on the data such as converting one type of data to another
(e.g., changing nominal values into numeric ones, discretizing continuous values), and/or
defining new attributes. In the mining step, the user may apply one or more knowledge
discovery techniques on the transformed data to extract valuable patterns. Finally, the

ILA-2: An Inductive Learning Algorithm 3
evaluation step involves interpreting the result (or discovered pattern) with respect to the
goal/task at hand. Note that the data mining process is not linear and involves a variety of
feedback loops, as any one step can result in changes in preceding or succeeding steps.
Furthermore, the nature of a real-world data set, which may contain noisy, incomplete,
dynamic, redundant, continuos, and missing values, certainly makes all steps critical on the
path going from data to knowledge (Deogun et al., 1997; Matheus, Chan, and Piatetsky-
Shapiro, 1993).
One of the methods in data mining step is inductive learning, which is mostly concerned with
finding general descriptions of a concept from a set of training examples. Practical data
mining tools generally employ a number of inductive learning algorithms. For example,
Silicon Graphics’ data mining and visualization product MineSet uses MLC++ as a base for
the induction and classification algorithms (Kohavi, Sommerfield, and Dougherty, 1996). This
work focuses on establishing causal relationships to class labels from values of attributes via a
heuristic search that starts with values of individual attributes and continues to consider the
double, triple, or further combinations of attribute values in sequence until the example set is
covered.
Once a new learning algorithm has been introduced, it is not unusual to see follow-up
contributions appear that extend the algorithm in order to improve it in various ways. These
improvements are important in establishing a method and clarifying when it is and is not
useful. In this paper, we propose extensions to improve upon such a new algorithm, namely
the Inductive Learning Algorithm (ILA) introduced by Tolun and Abu-Soud (1998). ILA is a
consistent inductive algorithm that operates on non-conflicting example sets. It extracts a rule
set covering all instances in a given example set. A condition (also known as a description) is
defined as a pair of attribute and its value. The condition plays a building block in
constructing the antecedent of a rule in which there may be one or more conditions conjuncted

ILA-2: An Inductive Learning Algorithm 4
with one to another; the consequent of that rule is associated with a particular class. The
representation of rules in ILA is suitable for data exploration such that a description set in its
simplest form is generated to distinguish a class from the other ones.
The induction bias used in ILA selects a rule for a class from a set of promising rules if and
only if the coverage proportion of the rule1 is maximum. To implement this bias, ILA runs in
a stepwise forward iteration that cycles as many times as the number of attributes until all
positive examples of a single class is covered. Each iteration searches for a description (or a
combination of descriptions) that covers a relatively larger number of training examples of a
single class than the other candidates do. Having found such a description (or combination),
ILA generates a rule with the antecedent part consisting of that description. It then marks the
examples covered by the rule just generated so that they are not considered in further iteration
steps.
The first modification we propose is the ability to deal with uncertain data. In general, two
different sources of uncertainty can be distinguished. One of these is noise that is defined as
non-systematic errors in gathering or entering data. This may happen because of incorrect
recording or transcription of data, or because of incorrect measurement or perception at an
earlier stage. The second situation occurs when descriptions of examples become insufficient
to induce certain rules. In this paper, a data set is called inconsistent if descriptions of
examples are not sufficient to induce rules. This case is also known as incomplete data to
point out the fact that some relevant features are missing to extract non-conflicting class
descriptions. In real-world problems this often constitutes the greatest source of error, because
data is usually organized and collected around the needs of organizational activities that
causes incomplete data from the knowledge discovery task point of view. Under such

ILA-2: An Inductive Learning Algorithm 5
circumstances, the knowledge discovery model should have the capability of providing
approximate decisions with some confidence level.
The second modification is a greedy rule generation bias that reduces learning time at the cost
of increased number of generated rules. This feature is discussed in section 3. ILA-2 is an
extension of ILA with respect to the modifications stated above. We have empirically
compared ILA-2 with ILA using real-world data sets. The results show that ILA-2 is better
than ILA in terms of accuracy in classifying unseen instances, size of the classifiers and
learning time. Some well-known inductive learning algorithms are compared to our own
algorithm. These algorithms are ID3 (Quinlan, 1983), C4.5, C4.5rules (Quinlan, 1993), OC1
(Murthy, Kasif, and Salzberg, 1994) and CN2 (Clark and Niblett, 1989). respectively. Test
results with unseen examples also show that ILA-2 is comparable to both CN2 and C4.5
algorithms.
The organization of this paper is as follows: In the following section, we briefly introduce the
ILA algorithm, the execution of the algorithm for an example task is also presented. In section
3, modifications to ILA algorithm are described. In section 4, the time complexity analysis of
ILA-2 is presented. Finally, ILA-2 is empirically compared with five well-known induction
algorithms over nineteen different domains.
2. The ILA Inductive Learning Algorithm
ILA works in an iterative fashion. In each iteration the algorithm strives for searching a rule
that covers a large number of training examples of a single class. Having found a rule, ILA
first removes those examples from further consideration by marking them, and then appends
the rule at the end of its rule set. In other words, the algorithm works on a rules-per-class
1 the coverage proportion of a rule is computed as the proportion of the number of positive (and none ofnegative) examples covered over the size of description (i.e., the number of conjunctives) is maximum amongstthe others.

ILA-2: An Inductive Learning Algorithm 6
basis. For each class, rules are induced to separate examples in that class from the examples in
the other classes. This produces an ordered list of rules rather than a decision tree. The details
of ILA algorithm are given in Figure 1. A good description is a conjuncted pair of attributes
and their values such that it covers some positive examples and none of negative examples for
a given class. The goodness measure assesses the extent of goodness by returning the good
description with maximum occurrences of positive examples. ILA constructs production rules
in a general-to-specific way, i.e., starting off with the most general rule possible and
producing specific rules whenever it is deemed necessary. The advantages of ILA can be
stated as follows:
Figure 1
• The rules are in a suitable form for data exploration; namely a description of each
class in the simplest way that enables it to be distinguished from the other classes.
• The rule set is ordered in a more modular fashion, which enables to focus on a
single rule at a time. Direct rule extraction is preferred over decision trees, as the
latter are hard to interpret particularly when there is a large number of nodes.
2.1 Description of the ILA Algorithm with a Running Example
In describing ILA we shall make use of a simple training set. Consider the training set for
object classification given in Table 1, consisting of seven examples with three attributes and
the class attribute with two possible values.
Table 1
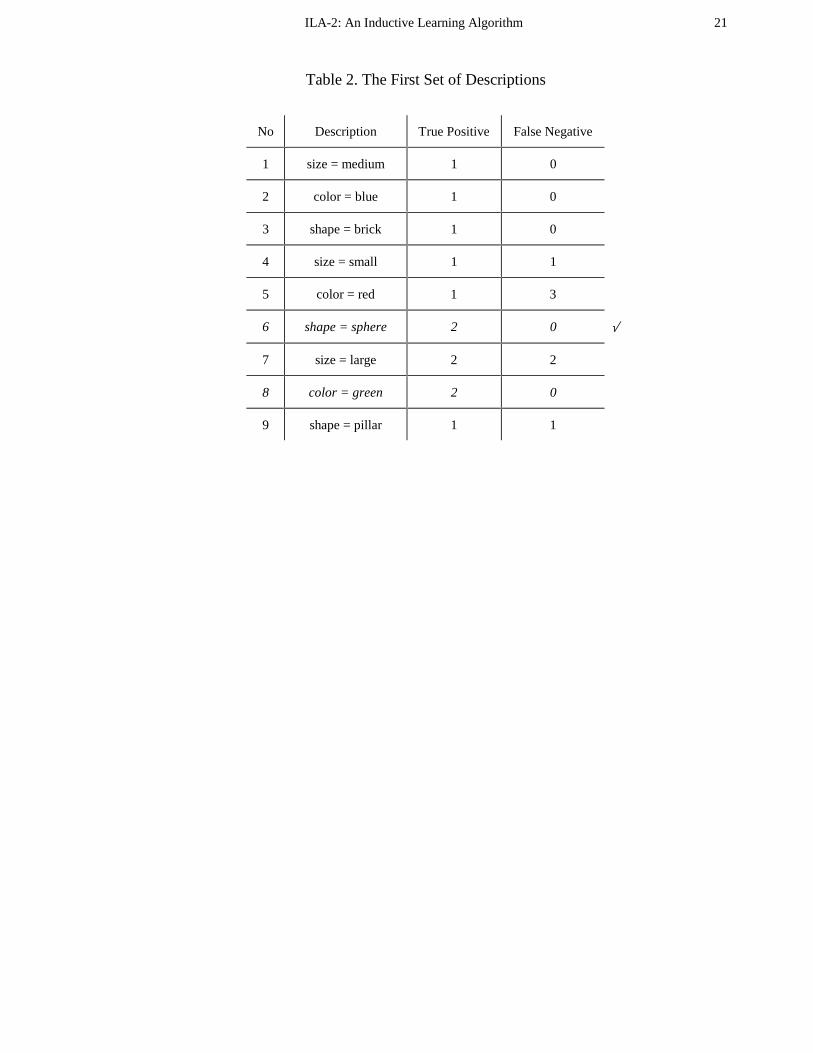
Let us trace the execution of the ILA algorithm for this training set. After reading the object
data, algorithm starts by the first class (yes), and generates hypothesis in the form of

ILA-2: An Inductive Learning Algorithm 7
descriptions as shown in Table 2. A description is a conjunction of attribute-value pairs, they
are used to form left-hand side of rules in the rule generation step.
Table 2
For each description the number of positive and negative instances are found. The descriptions
6 and 8 are the ones with the most positives and no negatives. Since description 6 is the first,
it is selected by default. Hence the following rule is generated:
Rule 1: IF shape = sphere -> class is yes
Upon generation of Rule 1, instances 2 and 6 covered by that rule are marked as classified.
These instances are no longer taken into account in hypothesis generation. Next time, the
algorithm generates descriptions shown in Table 3.
Table 3
In the second hypothesis space, there are four equivalent quality descriptions; 1, 2, 3 and 5.
The system selects the first description for a new rule generation.
Rule 2: IF size = medium -> class is yes
The item 1 covered by this rule is marked as classified, and next descriptions are generated
(Table 4).
Table 4.
This time only the second description satisfies the ILA quality criterion, and is used for the
generation of the following rule:

ILA-2: An Inductive Learning Algorithm 8
Rule 3: IF color = green -> class yes
Since example 4 is covered by this rule, it is marked as classified. All examples of the current
class (yes) are now marked as classified. The algorithm continues with the next class (no)
generating the following rules:
Rule 4: IF shape = wedge -> class is no
Rule 5: IF color = red and size = large -> class is no
Algorithm stops when all of the examples in the training set are marked as classified, i.e. all
the examples are covered by the current rule-set.
3. Extensions to ILA
Two main problems of ILA are over-fitting and long learning time. Over-fitting problem is
due to the bias that ILA tries to generate a consistent classifier on training data. However
training data, most of the time includes noisy examples causing over-fitting in the generated
classifiers. We have developed a novel heuristic function that prevents this bias in the case of
noisy examples. We also proposed another modification to make ILA faster, which considers
the possibility of generating more than one rule after the iteration steps.
The ILA algorithm and its extensions have been implemented by using the source code of
C4.5 programs. Therefore, in addition to extensions stated above, the algorithm has also been
enhanced by some features of C4.5, such as rule sifting and default class selection (Quinlan,
1993). During the classification process, the ILA system first extracts a set of rules using the
ILA algorithm. In the next step, the set of extracted rules for the classes are ordered to
minimize false positive errors, and then a default class is chosen. The default class is found as
the one with most instances not covered by any rule. Ties are resolved in favor of more

ILA-2: An Inductive Learning Algorithm 9
frequent classes. Once the class order and the default class have been established, the rule set
is subject to a post-pruning process. If there are one or more rules whose omission would
actually reduce the number of classification errors in training cases, the first such rule is
discarded and the set is checked again. This last step allows a final global scrutiny of the rule
set as a whole for the context it will be used.
ILA-2 algorithm can also handle continuous feature discretization through using the entropy-
based algorithm of Fayyad and Irani (1993). This algorithm uses a recursive entropy
minimization heuristic for discretization and couples this with a Minimum Description Length
criterion (Rissanen, 1986) to control the number of intervals produced over the continuous
space. In the original paper by Fayyad and Irani, this method was applied locally at each node
during tree generation. The method was found to be quite promising as a global discretization
method (Ting, 1994). We have used the implementation of Fayyad and Irani’s discretization
algorithm as provided within the MLC++ library (Kohavi, Sommerfeld, and Dougherty,
1996).
3.1 The Novel Evaluation Function
In general, an evaluation function’s score for a description should increase in proportion to
both the number of positive instances covered, denoted by TP, and the number of negative
instances not covered, denoted by TN. In order to normalize the score, a simple metric takes
into account the total number of positive instances, P, and negative instances, N, which is
given in (Langley, 1996) as
(TP + TN ) / (P + N),

ILA-2: An Inductive Learning Algorithm 10
where the resulting value ranges between 0 (when no positives and all negatives are covered)
and 1 (when all positives and no negatives covered). This ratio may be used to measure the
overall classification accuracy of a description on the training data.
Now, we may turn to description evaluation of the metric used in ILA, which can be
expressed as follows.
The description should not occur in any of the negative examples of the current class
AND must be the one with maximum occurrences in positive examples of the current
class.
Since this metric assumes, however, no uncertainty to be present in the training data, it
searches a given description space to extract a rule set that classifies training data perfectly. It
is, however, well-known fact that an application targeting real-world domains should address
how to handle uncertainty. Generally, uncertain tolerant classification requires relaxing the
constraint that the induced descriptions must classify the consistent part of training data (Clark
and Niblett, 1989), which is equivalent to say that classification methods should generate
almost true rules (Matheus, Chan, and Piatetsky-Shapiro, 1993). Considering this point, a
noise tolerant version of the ILA metric has been developed.
The above idea is also supported by one of the guiding principles of soft-computing: "Exploit
the tolerance for imprecision, uncertainty, and particular truth to achieve tractability,
robustness, and low solution cost" (Zadeh, 1994). Using these ideas, a new quality criterion is
established, in which the quality of a description (D) is calculated by the following heuristic:
Quality(D) = TP - PF * FN, where
TP (True Positives) is the number of correctly identified positive examples; FN (False
Negatives) is the number of wrongly identified negative examples; and PF (Penalty Factor) is

ILA-2: An Inductive Learning Algorithm 11
a user-defined parameter. Note that to reason about uncertain data, the evaluation measure of
ILA-2 maximizes the quality value of a rule for a given PF.
The Penalty Factor determines the negative effect of FN examples on the quality of
descriptions. It is similar to the well-known sensitivity measure used for accuracy estimation.
Usually sensitivity (Sn) is defined as the proportion of items that have been correctly predicted
to the number of items covered, i.e.,
Sn = TP / ( TP + FN ).
Sensitivity may be equivalently rewritten in terms of PenaltyFactor (PF) as
Sn = PF / ( PF + 1 ).
The user defined PF values may be converted to the sensitivity measure using the above
equation.
As seen in Figure 2, sensitivity value approaches to one as the penalty factor increases. The
advantage of the new heuristic may be seen by an example case. In respect to penalty factor of
five, let us have two descriptions one with TP=70 and FN=2, the other with TP=6 and FN=0.
The ILA quality criterion selects the second description. However, the soft criteria selects the
first one, which is intuitively more predictive than the second.
Figure 2
When penalty factor approaches to the number of training examples, the selection with the
new formula is the same as ILA criteria. On the other hand, a zero penalty factor means the
number of negative training examples has no importance and only the number of positive
examples are looked at, which is quite an optimistic choice.

ILA-2: An Inductive Learning Algorithm 12
Properties of classifiers generated by different values of penalty factor for splice dataset are
given in Table 5. The number of rules and the average number of conditions in the rules
increase as the penalty factor increases. As seen in Table 5, i.e., ILA with smaller penalty
factors, constructs smaller size classifiers.
Table 5
As seen from Figure 3, for all reasonable values of penalty factors, (1-30), we get better
results than ILA in terms of estimated accuracy. For this data set we get maximum estimated
accuracy prediction when penalty factor is 10. Increasing the penalty factor further does not
yield better classifiers. However, when we look at the accuracy on training data we see that
there is a proportional increase in the accuracy as the penalty factor increases.
Figure 3
3.2 The Faster Pass Criteria
In each iteration, after an exhaustive search for good descriptions in the search space, ILA
selects only one description to generate a new rule. This approach seems an expensive way of
rule extraction. However, it is possible that if there exists more than one description with the
same quality then all these descriptions may be used for possible rule generation. Usually the
second approach tends to decrease the processing time. On the other hand, this approach
might result in redundant rules with an increase in the size of the output rule-set.
The above idea was implemented in the ILA system and the option to activate this feature
referred to as FastILA. For example, in case of promoter data set FastILA reduced the
processing time from 17 seconds to 10 seconds. Also, the number of final rules decreased by
one and the total number of conditions by two. The experiments show that, if the size of the

ILA-2: An Inductive Learning Algorithm 13
classification rules is not extremely important and less processing time is desirable then
FastILA option would be more suitable to use.
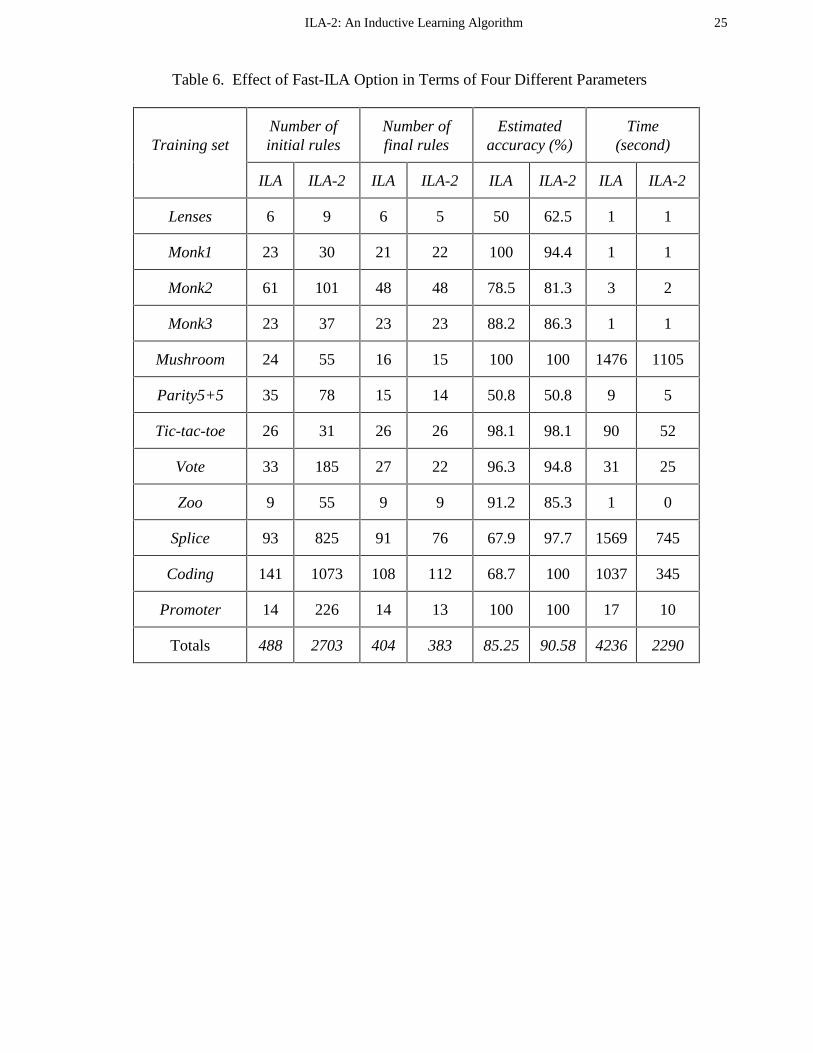
As seen in Table 6, ILA-2 (or ILA with fast pass criteria) generates a higher number of initial
rules than ILA, which amounts to about 5.5 on average for the evaluation data sets. This is
because of the faster pass criteria permits more than one rule to be asserted at once. However,
after the rule generation step is finished, the sifting process sifts all the unnecessary rules.
Table 6
4. The Time Complexity Analysis
In the time complexity analysis of ILA, only the upper bounds for the critical components of
the algorithm are provided because the overall complexity of any algorithm is domain-
dependent. Let us define following notation:
- e is the number of examples in the training set.
- Na stands for the number of attributes.
- c stands for the number of class attribute values.
- j is the number of attributes of the descriptions.
- S is the number of descriptions in the current test descriptions set.
The following procedure is applied when ILA-2 runs for a classification task: ILA-2 algorithm
comprises two main loops. The outer loop is performed for each class attribute value, which
takes time O(c). In the loop, first the size of the descriptions for the hypothesis space, also
known as version space, is set to one. A description is a combination of attribute-value pairs,
they are used as left-hand side of the IF-THEN rules in the rule generation step. Then an inner
loop is executed. The execution of the inner loop is continued until all examples of the current
class are covered by the generated rules or the maximum size for the descriptions is reached,
thus it takes time O(Na).

ILA-2: An Inductive Learning Algorithm 14
Inside the inner loop, first a set of temporary descriptions is generated for the given
description size using the training examples of the current class, O(e/c.Na). Then, occurrences
of these descriptions are counted, O(e.S). Next, good descriptions maximizing the ILA quality
measure are searched, O(S). If some good descriptions are found, they are used to generate
new rules. The examples matching these new rules are marked as classified, O(e/c). When no
description found passing the quality criteria the size of the descriptions for the next iteration
is incremented by one. Steps of the algorithm are given using short notations as follows;
for each class (c)
{
for each attribute (Na)
{
Hypothesis generation in the form of descriptions; // O((e/c) . Na)
Frequency counting for the descriptions; // O(e . S)
Evaluation of descriptions; // O(S)
Marking covered instances; // O(e/c)
}
}
Therefore, the overall time complexity is then given by
O(c.Na.(e/c.Na + e.S + S + e/c) ).
O(e.Na2 + c. Na.S.(e+1) + e.Na)
This may be simplified by replacing e+1 with e, and then the complexity becomes:
O(e.Na2 + c. Na.e.S + e.Na)
O(e. Na.(Na+c.S+1/c).
As 1/c is also comparatively small, then
O(e. Na.(Na+c.S).

ILA-2: An Inductive Learning Algorithm 15
Usually c.S is much larger than Na, e.g., in the experiments we selected S as 1500 while the
maximum Na was only 60. In addition c is also comparatively smaller than S. Therefore we
may simplify the complexity equation as:
O(e. Na.S).
So, the time complexity of the ILA is linear in the number of attributes and in the number of
examples. Also, the size of the hypothesis space (S) linearly affects the processing time.
5. Evaluation of ILA-2
For evaluation purposes of ILA-2 we have mainly used two parameters: the classifier size and
accuracy. Classifier size is the total number of conditions of the rules in the classifier. For
decision tree algorithms classifier size refers to the number of leaf nodes in the decision tree;
i.e., the number of regions that the data is divided by the tree. Accuracy is the estimated
accuracy on test data. We have used the hold out method to estimate the future prediction
accuracy on unseen data.
We have used nineteen different training sets from the UCI repository (Merz and Murphy,
1997). Table 7 summarizes the characteristics of these datasets. In order to test the algorithms
for the ability of classifying unseen examples a simple practice is to reserve a portion of the
training dataset as a separate test set, which is not used in building the classifiers. We have
employed the test sets related with these training sets from the UCI Repository in the
experiments, to estimate the accuracy of the classifiers’.
Table 7
In selecting the penalty factor (PF) as 1 and 5, we have considered the two ends and the
middle of the PF spectrum. In the higher end we observe that the ILA-2 performs like the
basic ILA, for this reason we have not included higher PF values in the experiments. The

ILA-2: An Inductive Learning Algorithm 16
lower end of the spectrum is zero, which eliminates the meaning of the PF. Therefore, PF=1 is
included in the experiments to see the results with the most relaxed (error tolerant) case. PF=5
case is selected as it represents a moderate case, which corresponds to sensitivity value of 0.83
in training.
We ran three different versions of ILA algorithm on these datasets: ILA-2 with penalty factor
set to 1 and 5, and the basic ILA algorithm. In addition, we ran three different decision tree
algorithms and two rule induction algorithms: ID3 (Quinlan, 1986), C4.5, C4.5rules (Quinlan,
1993), OC1 (Murthy Kasif, and Salzberg, 1994), and CN2 (Clark and Niblett, 1989).
Algorithms other than ILA-2 were run using the default settings supplied with their systems.
Estimated accuracies of generated classifiers on classifying the test sets are given in Table 8
on which our comparative interpretation is based. ILA algorithms have higher accuracies than
OC1 algorithm in classifying thirteen out of nineteen domains’ test sets. Compared to CN2,
ILA-2 performs better in eleven of the nineteen domains’ test sets and they have similar
accuracies in other two domains. ILA algorithms performed marginally better than C4.5
among the nineteen test sets, producing higher accuracies in ten domains’ test sets.
Table 8
Table 9 shows size of the output classifiers generated by the same algorithms above for the
same data sets. Results in the table prove that ILA-2 or ILA with the novel evaluation function
is comparable to C4.5 algorithms in terms of the generated classifiers’ size. When penalty
factor set to 1, ILA-2 usually produced the smallest size classifiers for the evaluation sets.
In regard to results in Table 9, it may be worth pointing out that ILA-2 solves over-fitting
problem of basic (certain) ILA, in a similar fashion to C4.5 solves the over-fitting problem of

ILA-2: An Inductive Learning Algorithm 17
ID3 (Quinlan, 1986). The sizes of classifiers generated by the corresponding classification
methods show the existence of this relationship clearly.
Table 9
6. Conclusion
We introduced an extended version of ILA, namely ILA-2, which is a supervised rule
induction algorithm. ILA-2 has additional features that are not available in basic ILA. A faster
pass criterion that reduces the processing time by employing a greedy rule generation strategy
is introduced. This feature, called fastILA, is useful for situations where a reduced processing
time is more important than the size of classification task performed.
The main contribution of our work is the evaluation metric utilized in ILA-2 for evaluation of
description(s). In other words, users can reflect their preferences via a penalty factor to tune
up (or control) the performance of ILA-2 system with respect to the nature of the domain at
hand. This provides a valuable advantage over most of the current inductive learning
algorithms.
Finally, using a number of machine learning and real-world data sets, we show that the
performance of ILA-2 is comparable to that of well-known inductive learning algorithms,
CN2, OC1, ID3 and C4.5.
As a further work, adapting different feature subset selection (FSS) approaches is planned to
be embedded into the system as a pre-processing step in order to yield a better performance.
With FSS, the search space requirements and the processing time will probably be reduced
due to the elimination of irrelevant attribute value combinations at the very beginning of the
rule extraction process.

ILA-2: An Inductive Learning Algorithm 18
References
Clark, P. and T. Niblett. 1989. The CN2 Induction Algorithm. Machine Learning 3: 261-283.
Deogun, J.S., V.V. Raghavan, A. Sarkar, and H. Sever. 1997. Data Mining: Research Trends,
Challenges, and Applications. Rough Sets and Data Mining: Analysis of Imprecise Data, (Ed.
T.Y. Lin and N. Cercone), 9-45. Boston, MA: Kluwer Academic Publishers.
Fayyad, U.M. 1996. Data Mining and Knowledge Discovery: Making Sense Out of Data.
IEEE Expert 11(5): 20-25.
Fayyad, U.M., and K.B. Irani. 1993. Multi-Interval Discretization of Continuous-Valued
Attributes for Classification Learning. In Proceedings of 13th International Joint Conference
on Artificial Intelligence, (Ed. R.Bajcsy,) 1022-1027. Philadelphia, PA: Morgan Kaufmann.
Kohavi, R., D. Sommerfield, and J. Dougherty. 1996. Data Mining Using MLC++: A
Machine Learning Library in C++. Tools with AI: 234-245.
Langley, P. 1996. Elements of Machine Learning. San Francisco: Morgan Kaufmann
Publishers.
Matheus, C.J., P.K. Chan, and G. Piatetsky-Shapiro. 1993. Systems for Knowledge Discovery
in Databases. IEEE Trans. on Knowledge and Data Engineering 5(6): 903-912.
Merz, C. J., and P. M. Murphy. 1997. UCI Repository of Machine Learning Databases,
http://www.ics.uci.edu/∼ mlearn/MLRepository.html. Irvine, CA: University of California,
Department of Information and Computer Science.
Murthy, S.K., S. Kasif, and S. Salzberg. 1994. A System for Induction of Oblique Decision
Trees. Journal of Artificial Intelligence Research 2: 1-32.

ILA-2: An Inductive Learning Algorithm 19
Quinlan, J.R., 1983. Learning Efficient Classification Procedures and their Application to
Chess End Games. In Machine Learning: An Artificial Intelligence Approach, (Eds, R.S.
Michalski, J.G. Carbonell, and T.M. Mitchell) 463-482. Palo Alto, CA: Tioga.
Quinlan, J.R. 1986. Induction of Decision Trees. Machine Learning 1: 81-106.
Quinlan, J.R. 1993. C4.5: Programs for Machine Learning. Philadelphia, PA: Morgan
Kaufmann.
Rissanen, J. 1986. Stochastic Complexity and Modeling. Ann. Statist. 14: 1080-1100.
Simoudis E., 1996. Reality Check for Data Mining. IEEE Expert, 11(5): 26-33.
Thornton, C.J., 1992. Techniques in Computational Learning-An Introduction. London:
Chapman and Hall.
Ting, K.M., 1994. Discretization of Continuous-valued Attributes and Instance-based
Learning. Technical Report 491, Univ. of Sydney, Australia.
Tolun, M.R., and S.M. Abu-Soud. 1998. ILA: An Inductive Learning Algorithm for Rule
Discovery. Expert Systems with Applications. 14: 361-370.
Zadeh, L. A. 1994. Soft Computing and Fuzzy Logic. IEEE Software. November: 48-56.

ILA-2: An Inductive Learning Algorithm 20
Table 1. Object Classification Training Set (Thornton, 1992).
Example no. Size Color Shape Class
1 medium Blue brick yes
2 small red wedge no
3 small red sphere yes
4 large red wedge no
5 large green pillar yes
6 large red pillar no
7 large green sphere yes
ILA-2: An Inductive Learning Algorithm 21
Table 2. The First Set of Descriptions
No Description True Positive False Negative
1 size = medium 1 0
2 color = blue 1 0
3 shape = brick 1 0
4 size = small 1 1
5 color = red 1 3
6 shape = sphere 2 0 √
7 size = large 2 2
8 color = green 2 0
9 shape = pillar 1 1

ILA-2: An Inductive Learning Algorithm 22
Table 3. The Second Set of Descriptions
No Description True Positive False Negative
1 size = medium 1 0 √
2 color = blue 1 0
3 shape = brick 1 0
4 size = large 1 2
5 color = green 1 0
6 shape = pillar 1 1

ILA-2: An Inductive Learning Algorithm 23
Table 4. The Third Set of Descriptions
No Description True Positive False Negative
1 size = large 1 2
2 color = green 1 0 √
3 shape = pillar 1 1

ILA-2: An Inductive Learning Algorithm 24
Table 5. Results for Splice Dataset with Different Values of Penalty Factors
PenaltyFactor
Number ofrules
Averagenumber ofconditions
Totalnumber ofconditions
Accuracy ontraining data
Accuracy ontest data
1 13 2.0 26 82.4% 73.4%
2 31 2.3 71 88.7% 81.6%
3 38 2.3 86 94.7% 87.6%
4 50 2.5 125 96.1% 87.2%
5 53 2.4 128 97.9% 86.9%
7 63 2.5 158 98.7% 85.4%
10 66 2.5 167 99.6% 88.5% √
30 87 2.6 228 100.0% 71.7%
ILA 91 2.6 240 100.0% 67.9%
ILA-2: An Inductive Learning Algorithm 25
Table 6. Effect of Fast-ILA Option in Terms of Four Different Parameters
Training setNumber ofinitial rules
Number offinal rules
Estimatedaccuracy (%)
Time(second)
ILA ILA-2 ILA ILA-2 ILA ILA-2 ILA ILA-2
Lenses 6 9 6 5 50 62.5 1 1
Monk1 23 30 21 22 100 94.4 1 1
Monk2 61 101 48 48 78.5 81.3 3 2
Monk3 23 37 23 23 88.2 86.3 1 1
Mushroom 24 55 16 15 100 100 1476 1105
Parity5+5 35 78 15 14 50.8 50.8 9 5
Tic-tac-toe 26 31 26 26 98.1 98.1 90 52
Vote 33 185 27 22 96.3 94.8 31 25
Zoo 9 55 9 9 91.2 85.3 1 0
Splice 93 825 91 76 67.9 97.7 1569 745
Coding 141 1073 108 112 68.7 100 1037 345
Promoter 14 226 14 13 100 100 17 10
Totals 488 2703 404 383 85.25 90.58 4236 2290

ILA-2: An Inductive Learning Algorithm 26
Table 7. The Characteristics Features of Tested Data-sets
DomainName
Number ofattributes
Number ofexamples intraining data
Number of classvalues
Number ofexamples in test
data
Lenses 4 16 3 8
Monk1 6 124 2 432
Monk2 6 169 2 432
Monk3 6 122 2 432
Mushroom 22 5416 2 2708
Parity5+5 10 100 2 1024
Tic-tac-toe 9 638 2 320
Vote 16 300 2 135
Zoo 16 67 7 34
Splice 60 700 3 3170
Coding 15 600 2 5000
Promoter 57 106 2 40
Australia 14 460 2 230
Crx 15 465 2 187
Breast 10 466 2 233
Cleve 13 202 2 99
Diabetes 8 512 2 256
Heart 13 180 2 90
Iris 10 100 3 50

ILA-2: An Inductive Learning Algorithm 27
Table 8. Estimated Accuracy’s of Various Learning Algorithms on Selected Domains
DomainName
ILA-2PF = 1
ILA-2PF = 5
ILA ID3C4.5-
prunedOC1
C4.5-rules
CN2
Lenses 62.5 50 50 62.5 62.5 37.5 62.5 62.5
Monk1 100 100 100 81.0 75.7 91.2 93.5 98.6
Monk2 59.7 66.7 78.5 69.9 65.0 96.3 66.2 75.4
Monk3 100 87.7 88.2 91.7 97.2 94.2 96.3 90.7
Mushroom 98.2 100 100 100 100 99.9 99.7 100
Parity5+5 50.0 51.1 51.2 50.8 50.0 52.4 50.0 53.0
Tic-tac-toe 84.1 98.1 98.1 80.9 82.2 85.6 98.1 98.4
Vote 97.0 96.3 94.8 94.1 97.0 96.3 95.6 95.6
Zoo 88.2 91.2 91.2 97.1 85.3 73.5 85.3 82.4
Splice 73.4 86.9 67.9 89.0 90.4 91.2 92.7 84.5
Coding 70.0 70.7 68.7 65.7 63.2 65.9 64.0 100
Promoter 97.5 97.5 100 100 95.0 87.5 97.5 100
Australia 83.0 76.5 82.6 81.3 87.0 84.8 88.3 82.2
Crx 80.2 78.1 75.4 72.5 83.0 78.5 84.5 80.0
Breast 95.7 96.1 95.3 94.4 95.7 95.7 94.4 97.0
Cleve 70.3 76.2 76.2 64.4 77.2 79.2 82.2 68.3
Diabetes 71.5 73.8 65.6 62.5 69.1 70.3 73.4 70.7
Heart 60.0 82.2 84.4 75.6 83.3 78.9 84.4 77.8
Iris 96.0 94.0 96.0 94.0 92.0 96.0 92.0 94.0

ILA-2: An Inductive Learning Algorithm 28
Table 9. Size of the Classifiers Generated by Various Algorithms
Domain NameILA-2,PF = 1
ILA-2,PF = 5
ILA ID3C4.5-
prunedC4.5-rules
Lenses 9 13 13 9 7 8
Monk1 14 37 58 92 18 23
Monk2 9 115 188 176 31 35
Monk3 5 48 63 42 12 25
Mushroom 9 13 22 29 30 11
Parity5+5 2 67 81 107 23 17
Tic-tac-toe 15 88 88 304 85 66
Vote 18 35 69 67 7 8
Zoo 11 16 17 21 19 14
Splice 26 128 240 201 81 88
Coding 64 256 319 429 109 68
Promoter 7 18 27 41 25 12
Australia 13 69 116 130 30 30
Crx 12 39 111 129 58 32
Breast 5 16 38 37 19 20
Cleve 8 55 64 74 27 20
Diabetes 6 22 33 165 27 19
Heart 1 25 19 57 33 26
Iris 5 16 4 9 7 5
Totals 238 1079 1570 2119 648 527

ILA-2: An Inductive Learning Algorithm 29
Figure 1. ILA Inductive Learning Algorithm

ILA-2: An Inductive Learning Algorithm 30
Figure 2. Penalty Factor vs. Sensitivity Values

ILA-2: An Inductive Learning Algorithm 31
Figure 3. Accuracy Values on Training and Test Data for the Splice Dataset.

ILA-2: An Inductive Learning Algorithm 32
For each class attribute value perform
{
1. Set j, which keeps the size of descriptions, to 1.
2. While there are unclassified examples in current class
and j is less than or equal to the number of attributes:
{
1. Generate the set of all descriptions in the current
class for unclassified examples using the current description size.
2. Update occurrence counts of all descriptions in the current set.
3. Find description(s) passing the goodness measure.
4. If there is any description that has passed the goodness measure:
{
1. Assert rule(s) using the ’good’ description(s).
2. Mark Items covered by the new rule(s) as classified.
}
Else increment description size j by 1.
}
}
Figure 1.

ILA-2: An Inductive Learning Algorithm 33
����
����
����
����
����
����
� � � � �� �� �� �� �� �� ��
3HQDOW\�IDFWRU
6HQVLWLYLW\
Figure 2.

ILA-2: An Inductive Learning Algorithm 34
0
20
40
60
80
100
1 3 5 10
ILA
penalty factor
Acc
ura
cy% Accuracy on
training data
Accuracy ontest data
Figure 3.