Enterprise environment modeling for penetration testing on ...
Upload
independentCategory
view
0download
0
Group State Estimation Algorithm Using
Foliage Penetration GMTI Radar Detections
Shozo Mori, Hui Hoang
Systems & Technology Research
Woburn, MA USA {Shozo.Mori,Hui.Hoang}@STResearch.com
17th International Conference on Information Fusion
Salamanca, Spain, 8 July 2014
Constantino Rago, Michael J. Shea,
Patricia L. Davey
BAE Systems,
Burlington, MA USA {Constantino.Rago,Michael.Shea,Patricia.Davey}@baesystems.com
Pablo O. Arambel
Raytheon Company
Sudbury, MA USA [email protected]
Chee-Yee Chong
Independent Consultant
Los Altos, CA USA [email protected]
Steve J. Alter
Independent Consultant
Needam, MA USA [email protected]
FUSION 2014
Salamanca Spain Paper 245

1 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Acknowledgement
The research described in this presentation was supported by the
United States Defense Advanced Research Project Agency (DARPA) for
its FOPEN (Foliage Penetration) GMTI (Ground Moving Target Indicator)
Radar Exploitation and Planning (FOPEN-GXP) Program. BAE Systems
was a subcontractor to Syracuse Research Corporation (SRC), the
developer of the FORESTER radar.
The authors developed and implemented the group state estimation
(GSE) algorithm while they were all at BAE Systems, from 2010 to 2012.
The views and conclusions expressed by this presentation are those of
the authors and should not be interpreted as representing the official
policies, either expressed or implied, of DARPA, the U.S. Government,
or SRC. DARPA approved this paper for unlimited distribution.
The authors would like to express their sincere appreciation to Mr.
Vincent Sabio, Program Manager, DARPA Information Innovation Office,
for his steady and solid technical guidance throughout the entire course
of the algorithm development effort reported in this presentation.

2 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
OUTLINE
• Foliage Penetrating (FOPEN), Ground Moving Target Indicator (MTI) Radar Extrapolation and Planning (FOPEN-GXP) Concept
• Group Tracking Algorithm: Two-Level algorithm – Individual Target Tracking
– Grouping, Merging and Splitting
• Processing Examples
• Conclusions

3 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Foliage Penetrating (FOPEN) Ground Moving
Target Indicator (GMTI) Radar Concept
• Foliage Penetrating (FOPN) Ground Moving Target Indicator (GMTI) radar for
FOPEN-GMTI Radar Exploitation and Planning (FOPEN-GXP) program is
airborne radar designed to detect hostile ground elements through dense foliage.
• Tracking using FOPEN GMTI radar is difficult because of (1) low state-dependent
detection-probability and (2) high-density structured false alarms.
• Data association is difficult but any multiple hypothesis tracking (MHT) will be
overwhelmed by significant uncertainty and data load (not a feasible solution).
• Detection-level target classification (vehicles,
dismounts, animals, etc.) is not possible.
• Need to track targets as groups and classify
them based on group activity patterns

4 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Our Approach
• Two-Level Tracking Approach
• Level 1: Individual (Group Members) Target Tracking
• Model a set of an unknown number of targets by
i.i.d. cluster finite point process (random finite set)
of stochastic processes*
• Calculate target density function
• Level 2: Group Tracking
• Group Forming, Merging, and Splitting
• Group Activity Analysis
• Group Identification
• No feedback to Level 1.
* S. Mori, and C.-Y. Chong, “Evaluation of Data Association Hypotheses: Non-Poisson I.I.D. Cases,” Proc. 7th International Conference on Information Fusion, pp. 1133 – 1140, Stockholm, Sweden, July 2004.

5 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Individual Target (Group Member) Tracking
Underlying Model
o I.I.D. cluster of finite point process (random finite set) of stochastic
process (position & velocity), 1(( ( )) )n
i t T ix t .
o NOT a stochastic process on a space of finite point processes (random
finite sets), 1(( ( )) )n
i i t Tx t .
Calculate Target Density
o A Posteriori First-Order Moment Measure: def
1( | ) ( ; )
n
iiB Y x B Y
o Radon-Nikodym derivative ( | )x Y of ( | )B Y is Probability Hypothesis
Density (PHD), or posterior first-order moment measure density, or
posterior intensity measure density, so that ( | ) ( | )B
B Y x Y dx .
Algorithm is: Sum-Of-Gaussian (Gaussian Mixture) Cardinalized PHD
(SOG+
CPHD)*: 1
ˆˆ ˆ( | ) ( | ) ( ; )N
UDT n n n
n
x Y x Y g x x V
1
def
1/2
(1/2)
( ; )
det(2 )TV
g V
V
e
* S. Mori, and C.-Y. Chong, “An Alternative Form of Cardinalized PHD Filter or I.I.D.-
Approximation Filter,” Proc. 10th International Conference on Information Fusion, Quebec,
Quebec, Canada, July 2007.
=informationY

6 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Individual Target Density Calculation
We use standard Cardinalized PHD (CPHD) filter, i.e., use i.i.d. cluster
approximation of a collection of all the orders of conditional Janossy measures
at the beginning of each measurement update (scan),
except for No target is born or killed
o A target is born. A target is detected for the first time.
Maintain undetected target density, ( | )UDT x Y
o A target is killed. A target stops or goes out of field-of-view.
Detection probability is state dependent as ( )DP x
Treat each Gaussian term, 1
21/2
ˆˆ ˆˆ ˆ( ; ) det(2 ) exp (1/ 2)
nn n n n V
g x x V V x x
as
a track with probabilistic weight ˆn
o Maintain parentchild relation (track history) activity analysis
o Processing structure similar to track-oriented MHT Replace optimal
data association selection for track pruning pruning using track
weights ˆn

7 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Track-Oriented Multiple Hypothesis
Tracking (MHT)
1
First Frame (SCAN)
Second Frame (SCAN)
0=
2 0
y11
y12
5 6 1
y21
y22 7 8 2 3 4 0
101L 1(1 ( ))DP x102L
211L212L
210L 221L222L
220L 201L202L
Track likelihood ( )k for each track is
updated by track-to-detection likelihood
kijL for i -th track and j -th detection for
each frame k .
1 1( )1 2( )
2 5( ) 2 6( )2 1( ) 2 7( ) 2 8( )
2 2( ) 2 3( ) 2 4( )
1U
0U
2U
2(1 ( ))DP x
Null Track =
Common track for
undetected targets
Measurement-to-
track assignment
Hypothesize miss
detections

8 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
SOG (GM) CPHD Track Weight Updates
1
0=
2 0
y11
y12
5 6 1
y21
y22 7 8 2 3 4 0
101 11
11D
L W
Sum-of-Gaussian (SOG) target density function: ˆ
1
ˆˆ ˆ ˆ ˆ( ) ( ) ( ; )kN
k Uk k ki kii
x x g x x V
to represent
1 1( ( ); ) ,...,
ˆ ( )
ni i k k
kB
x t B y y
x dx
11v12
1U
0U
2U
101 11
12D
L W
20 2(1 ( ))DW P x
10 1(1 ( ))DW P x
201 21
21D
L W
201 22
22D
L W
211 21
21D
L W
212 22
22D
L W
221 21
21D
L W
222 22
22D
L W
210 20L W 220 20L W
21v22v
23v 24v25v 26v
27v28v
Number-of-Target (Cardinality) Probability
Distribution Update: 1
0 1ˆ ( ) ( , ) (( ) )kk
DT
mm
nk NTk D kj jp n C L n n r
Null Track =
Common track for
undetected targets
Measurement-to-
track assignment
Hypothesize miss
detections
First Frame (SCAN)
Second Frame (SCAN)

9 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Group-Level Tracking Group Formation, Group Merging, and Group Splitting
New group track: No term has a parent • Assign a new ID, and • Set the group cardinality as the sum of the weights of the individual terms.
Continuation group track: Each term has the same parent group track ID
• Assign the parent ID to the group track ID, • Derive the cardinality from the cardinality of the parent group updated with the estimated
cardinality of the child group. Merged group track: Some Gaussian terms are derived from two or more previous groups
• Assign a new group track ID, • Augment the lineage of the track with two or more parent group track IDs, and • Reset the cardinality to the cardinality of the new group.
Split group track: Gaussian terms from a single group separate
• Split the group into two or more groups (after identifying all the new groups, continued groups, and merged groups (as described above)),
• Assign a new ID, • Augment the lineage with the group track ID of the parent, and • Reset the cardinality to the cardinality of each new group.

10 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Raw GMTI (STANAG 4607) data (yellow triangles) collected on Ft. Stewart, Georgia (multiple dwells shown)

11 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Ground truth for the Ft. Stewart scenario in the previous figure, and the corresponding estimated group track position and
cardinality.
12 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
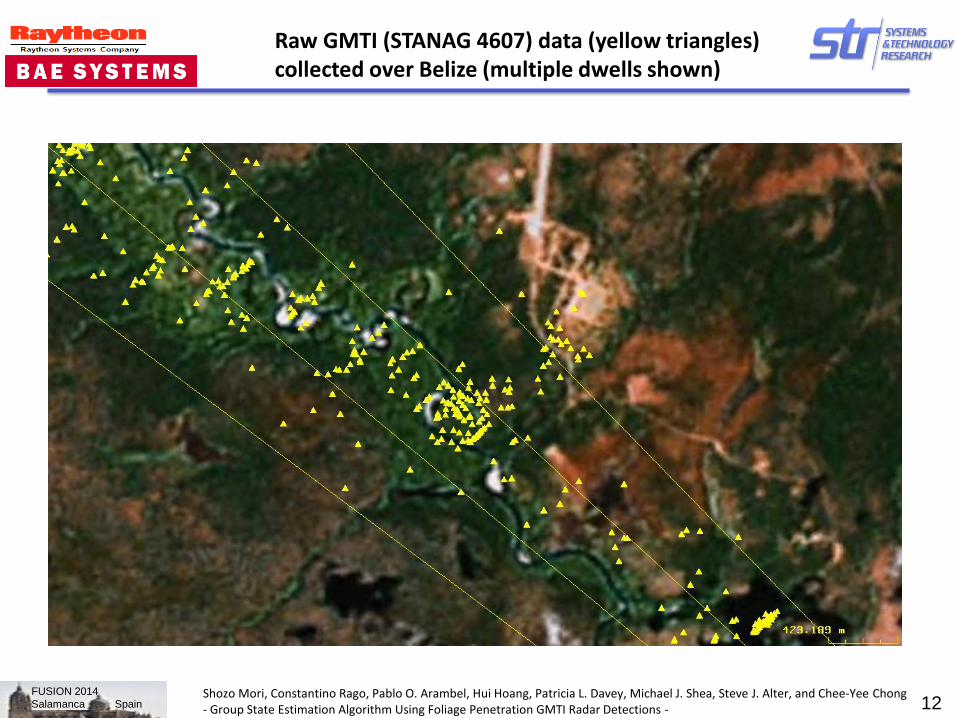
Raw GMTI (STANAG 4607) data (yellow triangles) collected over Belize (multiple dwells shown)

13 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
Ground truth for the Belize scenario in the previous figure, and the
corresponding estimated group track position and cardinality.
Estimated Group size ~1 to 2
14 FUSION 2014
Salamanca Spain Shozo Mori, Constantino Rago, Pablo O. Arambel, Hui Hoang, Patricia L. Davey, Michael J. Shea, Steve J. Alter, and Chee-Yee Chong - Group State Estimation Algorithm Using Foliage Penetration GMTI Radar Detections -
CONCLUSIONS
• We have shown the sum-of-Gaussian (SOG) group state estimation (GSE)
algorithm that the authors developed and implemented for DARPA’s Foliage
Penetrating (FOPEN) Ground Moving Target Indicator (GMTI) radar,
extrapolation and planning (FOPEN-GEP) in 2010 – 2012, at BAE Systems.
• The GSE algorithm works at two levels, individual target (group members)
level, and group level. The individual target level algorithm is a variation of
SOG CPHD, characterized by (i) no birth-death process (instead maintains
the undetected target density, and use state dependent target detection
probability), and (ii) track tree maintenance (maintaining parent-child
relations – aiding group activity analysis).
•The GSE algorithm was thoroughly tested through the data collected by the
FOPEN Reconnaissance, Surveillance, Tracking and Engagement Radar
(FORESTER) mounted on airborne frames at various locations, and under
diverse conditions.
Copyright © 2022 FDOKUMEN