Frequency-domain reconstruction of signals in electrical bioimpedance spectroscopy
10
ORIGINAL ARTICLE Frequency-domain reconstruction of signals in electrical bioimpedance spectroscopy Aleksander S. Paterno • Rodrigo A. Stiz • Pedro Bertemes-Filho Received: 5 February 2009 / Accepted: 5 September 2009 / Published online: 10 October 2009 Ó International Federation for Medical and Biological Engineering 2009 Abstract The use of an amplitude/phase retrieval algo- rithm in electrical bioimpedance spectroscopy (EIS) that allows a new technique to reconstruct the impedance spectrum in the frequency-domain is reported. To the authors’ knowledge this is the first time the proposed algorithm has been used to calculate the modulus or phase of a bioimpedance in EIS from one of these two experi- mentally obtained parameters. The algorithmic technique is demonstrated in EIS, when wide-bandwidth amplifiers, phase-detectors, and high speed converters determine spectra over frequencies up to 500 kHz at isolated points in the frequency interval. Simulated data from bioimpedance models (Cole and 2R1C circuit impedance functions) and experimental data from a known electrical impedance are used to show the applicability and limitations of the tech- nique with a phase retrieval and a modulus retrieval algo- rithm. Results comparing this technique with the Kramers– Kronig technique that retrieves the imaginary part of an impedance from its real part are also discussed. Keywords Bioimpedance Phase/modulus retrieval Dielectric spectroscopy 1 Introduction Electrical bioimpedance spectroscopy (EIS) is becoming an important tool in biomedical engineering, being used in the evaluation and the characterization of biological tissues in medical diagnosis and in the reconstruction of images in electrical impedance tomography [3, 13]. One example application would be the use of multi-frequency bioim- pedance spectroscopy to assess skin cancers and other cutaneous lesions [1]. EIS allows the measurement of an unknown transfer impedance across a predetermined fre- quency interval from which one can infer the analyzed tissue characteristics. In a typical sweeping EIS system, the sample tissue or cell suspension to be characterized is excited by a constant amplitude sine voltage or current and then the impedance is calculated at each frequency after the other parameter, current, or voltage is read. The obtained signal can be demodulated by a matched filter technique that produces signals proportional to the reactive and real part of the bioimpedance at the specific frequency. This technique is called digital synchronous demodulation (DSD) and uses a matched filter equivalent to the structure used in the detection of communication signals [13]. The spectra are determined either by obtaining the impedance real and imaginary parts, or by directly obtaining its modulus and phase. If one decides to determine modulus and phase via Fourier Transform techniques, analog precision amplifiers and phase detectors provide signals proportional to modulus and phase at each frequency, and the EIS frequency range may cover intervals between 100 Hz and 10 MHz. The use of the Kramers–Kronig causality relations to obtain the imaginary part from the real part of a causal spectrum has also been considered in EIS for the analysis of biological tissues [26]. In this study, the use of phase/ modulus retrieval algorithms is proposed to calculate the missing part of an electrical bioimpedance spectrum. The algorithm differs from the Hilbert transform used in the Kramers–Kronig technique because it is based on proper- ties of the discrete Fourier transform and it is an iterative A. S. Paterno (&) R. A. Stiz P. Bertemes-Filho Department of Electrical Engineering, Santa Catarina State University, Campus Universita ´rio Prof. Avelino Marcante s/n, 89223-100 Joinville, Brazil e-mail: [email protected] 123 Med Biol Eng Comput (2009) 47:1093–1102 DOI 10.1007/s11517-009-0533-1
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Frequency-domain reconstruction of signals in electrical bioimpedance spectroscopy

ORIGINAL ARTICLE
Frequency-domain reconstruction of signals in electricalbioimpedance spectroscopy
Aleksander S. Paterno • Rodrigo A. Stiz •
Pedro Bertemes-Filho
Received: 5 February 2009 / Accepted: 5 September 2009 / Published online: 10 October 2009
� International Federation for Medical and Biological Engineering 2009
Abstract The use of an amplitude/phase retrieval algo-
rithm in electrical bioimpedance spectroscopy (EIS) that
allows a new technique to reconstruct the impedance
spectrum in the frequency-domain is reported. To the
authors’ knowledge this is the first time the proposed
algorithm has been used to calculate the modulus or phase
of a bioimpedance in EIS from one of these two experi-
mentally obtained parameters. The algorithmic technique is
demonstrated in EIS, when wide-bandwidth amplifiers,
phase-detectors, and high speed converters determine
spectra over frequencies up to 500 kHz at isolated points in
the frequency interval. Simulated data from bioimpedance
models (Cole and 2R1C circuit impedance functions) and
experimental data from a known electrical impedance are
used to show the applicability and limitations of the tech-
nique with a phase retrieval and a modulus retrieval algo-
rithm. Results comparing this technique with the Kramers–
Kronig technique that retrieves the imaginary part of an
impedance from its real part are also discussed.
Keywords Bioimpedance � Phase/modulus retrieval �Dielectric spectroscopy
1 Introduction
Electrical bioimpedance spectroscopy (EIS) is becoming an
important tool in biomedical engineering, being used in the
evaluation and the characterization of biological tissues in
medical diagnosis and in the reconstruction of images in
electrical impedance tomography [3, 13]. One example
application would be the use of multi-frequency bioim-
pedance spectroscopy to assess skin cancers and other
cutaneous lesions [1]. EIS allows the measurement of an
unknown transfer impedance across a predetermined fre-
quency interval from which one can infer the analyzed tissue
characteristics. In a typical sweeping EIS system, the sample
tissue or cell suspension to be characterized is excited by a
constant amplitude sine voltage or current and then the
impedance is calculated at each frequency after the other
parameter, current, or voltage is read. The obtained signal
can be demodulated by a matched filter technique that
produces signals proportional to the reactive and real part of
the bioimpedance at the specific frequency. This technique
is called digital synchronous demodulation (DSD) and uses
a matched filter equivalent to the structure used in the
detection of communication signals [13]. The spectra are
determined either by obtaining the impedance real and
imaginary parts, or by directly obtaining its modulus and
phase. If one decides to determine modulus and phase via
Fourier Transform techniques, analog precision amplifiers
and phase detectors provide signals proportional to modulus
and phase at each frequency, and the EIS frequency range
may cover intervals between 100 Hz and 10 MHz.
The use of the Kramers–Kronig causality relations to
obtain the imaginary part from the real part of a causal
spectrum has also been considered in EIS for the analysis
of biological tissues [26]. In this study, the use of phase/
modulus retrieval algorithms is proposed to calculate the
missing part of an electrical bioimpedance spectrum. The
algorithm differs from the Hilbert transform used in the
Kramers–Kronig technique because it is based on proper-
ties of the discrete Fourier transform and it is an iterative
A. S. Paterno (&) � R. A. Stiz � P. Bertemes-Filho
Department of Electrical Engineering, Santa Catarina State
University, Campus Universitario Prof. Avelino Marcante s/n,
89223-100 Joinville, Brazil
e-mail: [email protected]
123
Med Biol Eng Comput (2009) 47:1093–1102
DOI 10.1007/s11517-009-0533-1

algorithm, while the direct reconstruction method provided
by the Hilbert transform requires a numerical integration
over the frequency interval of the available data. The
conditions to be satisfied by the phase/modulus retrieval
algorithm are more restrictive than in the Kramers–Kronig
technique. With a direct or iterative algorithm to retrieve
phase or modulus, the phase-detectors or the precision
instrumentation amplifiers may be obviated in the EIS
system, and the use of the algorithm depends on the nature
of the bioimpedance spectrum, since the data must satisfy
the technique constraints. For reconstruction, a version of
the algorithm [12] is proposed as an alternative technique
to determine the transfer impedance in an EIS system from
partial acquired information.
In some EIS systems, the current signal used in the
sample excitation is band-limited, because the output
impedance of the current source and the open-loop gain of
its amplifiers are low, especially at high frequencies [2].
Some of these characteristics may be avoided by also using
digital signal processing techniques to eliminate the elec-
tronic circuitry with frequency limitations such as insuffi-
cient sampling rate or operation bandwidth. The
instrumentation necessary for modulus detection in this
case requires mostly high-speed analog-to-digital convert-
ers following high-precision instrumentation amplifiers. In
the case of phase detection circuits, a high-precision analog
multiplier is commonly used, providing a DC signal pro-
portional to the phase of its input. Such multipliers require
a reference, namely, the excitation source signal. At pres-
ent, integrated phase-gain detector circuits are usually
designed for operation in radio frequency (RF) and inter-
mediate frequency (IF) [27], and not for impedance char-
acterization in the EIS frequency range. Other integrated
circuits which provide modulus and phase of a signal also
have a frequency response in the operation frequency
interval for EIS systems, having a cut-off at around
100 kHz in the frequency response [21]. A software solu-
tion would provide an alternative to the use of such phase
or modulus detectors. With this system configuration,
phase/modulus retrieval algorithms may be used to obtain
the phase or modulus of an impedance, considering that
one of these sets of values has been electronically obtained
and the resulting data satisfies the conditions to use the
algorithm.
In the following sections, the algorithm is analyzed with
input data characterized by noisy impedance functions used
in EIS systems and typical bioimpedance spectra to test the
applicability of the technique. Experimental data obtained
with a complete EIS system applied to a known electrical
impedance are used to illustrate the algorithm performance
in a practical case. Such data were obtained from one
channel of a system developed by the authors for multi-
channel EIS, where another version of the algorithm for
multi-dimensional data sets could well be used, following
the same principle explained here.
2 Methodology
2.1 Impedance simulation
The simulation of an impedance was performed in order to
produce an impedance spectrum that may be used as a
representation of bioimpedance data used in EIS systems.
The 2R1C circuit in parallel version as applied to biolog-
ical tissue or cell suspensions is a circuit where a resis-
tance, R, is in parallel with a series circuit formed by a
resistance, S, and a capacitance, C. For a modeled tissue,
the extracellular fluid is associated with R, the intracellular
fluid, with a resistance S, and the cell membrane capaci-
tance, with C [10]. The 2R1C impedance for lung tissue
was simulated using parameters found in the literature for
R = 99.5 X, S = 23.8 X, and C = 9.86 nF [15]. The Cole
impedance function [4], which is usually used to fit
experimental bioimpedance data, is simulated to evaluate
the behavior of the algorithm. The function of the Cole
impedance for the frequency dependence of tissue or cell
suspension is then represented by [10]
ZColeðxÞ ¼ R1 þR� R1
1þ ðjxs0Það1Þ
where R? = RS/(R ? S) is the resistance at very high
frequencies, j is the imaginary unit, a describes a Cole-type
distribution of relaxation times and for many tissues and
interfaces is a value in the interval 0.7 \ a\ 0.9 [14], and
s0 is the characteristic relaxation time.
For the 2R1C circuit impedance function, the procedure to
simulate it results from obtaining the Laplace transform
impedance, Z(s), and mapping the impedance zeros and
poles into the z-domain by using the matched-z variable
transformation [17]. The system function in the z-domain,
Z(z), can be obtained with a MATLAB built-in function. The
minimum-phase condition may be verified during this pro-
cedure. With another variable transformation, z = ejx, one
obtains the Discrete Fourier Transform (DFT) polar repre-
sentation of the impedance, ZðxkÞ ¼ ZðxkÞj jejhk ; where
xk ¼ 2pkN are the N normalized frequency points with k = 0,
1, …, N - 1. The impedance Fourier Transform is depicted
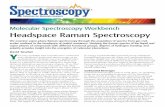
in Fig. 1, where x = 2pf is a function of the continuous
frequency, f. The DFT data points are complex values which
form the input to the algorithm and in a practical case may be
partially obtained with electronic circuits, either by acquir-
ing the phase hk or modulus ZðxkÞj j:The simulated samples of modulus that serve as input to
the algorithm are all in the frequency-domain at discrete
frequencies and were calculated using a MATLAB script,
1094 Med Biol Eng Comput (2009) 47:1093–1102
123
as well as the z-domain and s-domain representations of Z.
The algorithm itself was also implemented in a MATLAB
script. The frequency axis will be represented using the
normalized frequency from zero to p rad/s, where
x = p rad/s corresponds to the maximum frequency for
the simulated impedance, in this case, f = 10 MHz.
Error curves for algorithmic evaluation The errors plotted
in the simulated and experimental graphs resulted in a
sequence formed by the absolute value of the difference
between the original signal and the reconstructed signal at
each frequency point. The mean value of such a sequence is
the mean error. The relative error is calculated using nor-
malized values and is shown as a percentage of the maximum
value in the data set. Considering a comparison of the tech-
niques, data obtained from the published literature [20, 26] are
used for a qualitative comparison of the errors in obtaining the
imaginary part from the real part of an impedance with the
errors obtained in the modulus retrieval algorithm.
2.1.1 The Kramers–Kronig technique as a phase/modulus
retrieval technique
The Kramers–Kronig relations are expressed in the fol-
lowing equations for a causal impedance ZðxÞ ¼jZðxÞjejh ¼ ZRðxÞ þ jZIðxÞ [10]:
ZRðx�Þ ¼ ZRð1Þ þ2
p
Z1
0
xZIðxÞ � x�ZIðx�Þx2 � x2
�dx ð2Þ
ZIðx�Þ ¼2xc
p
Z1
0
ZRðxÞ � ZRðx�Þx2 � x2
�dx ð3Þ
The Kramers–Kronig relations are derived from the
Hilbert transform applied to a causal function, and allows
one to obtain the imaginary/real part from the real/imaginary
part of a causal function in the frequency-domain. If one
wants to obtain the real part of Z(x) by using Eq. (2), it
would require the knowledge of the real part at infinite
frequency and also an integration over an infinite interval to
determine an accurate retrieval of impedance real part. If the
imaginary part is to be determined, as in Eq. 3, the
knowledge of the real part of the impedance over a wide
(infinite) interval would be necessary. In both cases, a
numerical integration is required for each frequency point.
There is also the problem of calculating the integral at the
frequency x*, which results in a singularity [26]. Even with
such drawbacks, this method can also be used to solve the
problem of obtaining modulus/phase from phase/modulus,
by using Eqs. 2 and 3 in the logarithm lnðjZðxÞjejhðxÞÞ ¼lnðjZðxÞjÞ þ jhðxÞ producing the result jh(x) from
lnðjZðxÞjÞ or lnðjZðxÞjÞ from jh(x) [17]. Of course, the
natural logarithm of |Z(x)| should also be calculated.
This technique is non-iterative and requires the input
signal to be causal, being technically based on the numerical
integration of a function. If modulus retrieval is required, the
logarithm of the data is another computational process to be
implemented. In contrast with the direct technique, the
algorithm described in the following section is an iterative
procedure that may be eventually used in implementing the
Hilbert transform as described in the literature [19]. For the
implementation of the Hilbert transform with the magnitude
retrieval iterative algorithm, the known phase may be used
as input and the obtained magnitude is retrieved to within a
factor, K, and the log-magnitude of this term may be com-
puted to within an additive factor lnðKÞ; resulting in the
Hilbert transform of the sequence.
When applying the direct Hilbert transform as a mod-
ulus retrieval algorithm, the unwrapped phase must be used
as input data to retrieve the logarithm of the modulus. The
unwrapped phase input is defined as a continuous phase
function and when applied to the Hilbert transform an
additional algorithm would be necessary to unwrap the
input data [25]. In the iterative algorithm, the phase
unwrapping requirement is not necessary [19].
2.2 Iterative phase/modulus retrieval algorithm
The algorithm used in this paper has been proposed by
Oppenheim and co-workers [12, 19] and is capable of
reconstructing a signal from its Fourier transform modulus
or phase. However, some constraints are imposed on the
data set to be processed so that the algorithm can produce a
unique retrieved phase or modulus.
In the phase retrieval procedure from the modulus of
the Fourier transform, it is sufficient that the signal has a
non-factorable z-transform, is real and of finite duration.
This is the case for the simulated 2R1C function in Fig. 1,
0 1 2 3
0.9
1.8
2.7
3.6
4.5|Z
(ω)|
0 1 2 3-0.8
-0.6
-0.4
-0.2
0.0
θ(ω
) (r
ad)
NORMALIZED FREQUENCY ω = fπ10-7 (rad/s)
Fig. 1 Discrete Fourier Transform of a simulated electrical imped-
ance using lung tissue parameters, with N = 128 points. In the uppergraph, the DFT modulus; below the impedance DFT phase
Med Biol Eng Comput (2009) 47:1093–1102 1095
123

but impedances used in EIS may not satisfy these con-
straints. As a consequence, for a single data set of modulus
points, there may be more than one corresponding phase
data set, and phase reconstruction will not be unique.
In Fig. 1, it can be observed that the impedance spec-
trum plot is a minimum-phase spectrum of N = 128 points.
As a consequence, the system function of the impedance,
Z(z), has neither zeros on the unit circle nor in conjugate
reciprocal pairs. In addition, it is stable and causal [19] and
all these characteristics are related to the constraints on the
data set for the application of the iterative modulus
retrieval algorithm in the spectrum, so that the calculated
spectrum is unique [12, 16]. Another consequence of the
algorithm use is that the modulus will be reconstructed to
within a scale factor. To obtain such a factor, when pro-
viding experimental phase data sets to retrieve modulus via
software, the algorithm must be previously calibrated.
Since the goal here is to demonstrate the validity of the
technique, the reconstructed spectra can be presented in a
normalized form for comparison purposes between the
reconstructed and the original spectrum.
The ZCole(x) function in Eq. 1 is not a rational function
of polynomials in jx, therefore it is necessary to simulate
the impedance with different a values in the interval (0, 1)
and use the algorithm to reconstruct modulus or phase data
from partial information to find out if the algorithm con-
verges to a unique and correct reconstructed data set. The
conditions to use the algorithm will not be directly tested
with a Cole-type impedance. Considering the analysis
found in the literature for another reconstruction method
using the Kramers–Kronig relations [26], for comparison
purposes, the modulus retrieval algorithm dependence on
the characteristic relaxation constant is evaluated. Different
characteristic relaxation constants are used in Eq. 1 to show
the error performance of the algorithm with respect to
impedance function average relaxation constant, s0.
2.3 Simulation of the fractional order Cole-type
functions
Since many tissues or cell suspensions cannot be modeled
by the ideal Debye-type single relaxation (pole) function,
an impedance function in terms of a distribution function of
relaxation times may be used to evaluate if this structure
(Cole function) is usable with the phase/modulus algo-
rithm. Fuoss and Kirkwood [8] extended the Debye theory
from which a relation can be obtained between the distri-
bution function, G(s) and a transfer function, Z(s), using
ZðsÞ ¼R1
0
GðsÞ1þssds: With this relation between Z(s) and
G(s), the function containing the fractional order term,
ðss0Þa; in the Cole-type impedance function would then be
represented by the following integral of the distribution
function G(s), as originally developed by Cole and Cole [5]
for a dielectric model [5]
ZfracðsÞ ¼R� R1
1þ ðss0Þa¼ ðR� R1Þ
Z1
0
GðsÞ1þ ss
ds ð4Þ
where the function G(s) is the distribution function for the
Cole model and is given by a modified form of the
distribution function as used to obtain the Cole–Cole
function [5]:
GðsÞ ¼ 1
2psin ð1� aÞp½ �
cosh a logð ss0Þ
h i� cos ð1� aÞp½ �
24
35: ð5Þ
It must be recalled that the Cole–Cole function containing
the fractional order term, ðss0Þ1�ainstead of the ðss0Þa; was
originally used in a model for dielectrics [5]. The complete
model developed by Cole and Cole consists of an equation,
an equivalent circuit and a complex impedance circular arc
locus. The Cole–Cole function in Eq. 6 is an empirical
formula that represents the complex dielectric constant of a
large class of liquids and dielectrics [5].
��ðxÞ ¼ �1 þ�0 � �1
1þ ðjxs0Þ1�a ð6Þ
where ��ðxÞ is the complex dielectric permittivity as a
function of frequency x, �0; and �1 are the dielectric
permittivity at x = 0 and at infinite frequency, respec-
tively, and s0 is the generalized relaxation time. The Cole–
Cole function was first obtained by the Cole brothers when
they also introduced the distribution function correspond-
ing to Eq. 6.
For the use of the phase/modulus retrieval algorithm in
ZCole(s) the independent term corresponding to the resis-
tance, R?, causes the frequency dependent function to
satisfy neither the phase nor the modulus retrieval algo-
rithm conditions. However, if the resistance at high fre-
quencies is equal to or even approximately zero, only the
fractional order term Zfrac(s) may be used as input to the
algorithm producing lower errors for a specific interval of
a. In the limit, when a & 0, Zfrac(s) becomes a pure
resistance having minimum phase. For values of a in the
interval (0, 1), the modulus retrieval algorithm is capable of
producing a limited error, and this is going to be demon-
strated in a simulation for different s0 and a.
When the experimental data are initially unknown, it is
not possible to conclude that the algorithm will provide the
desired spectrum and satisfy the algorithm constraints. One
possible solution would be to experimentally determine a
spectrum from a standardized material, and test if this
spectrum satisfies the algorithm constraints. The test could
be implemented, for example, by using an algorithm to
decide if the samples form a minimum-phase sequence.
1096 Med Biol Eng Comput (2009) 47:1093–1102
123
The Schur–Cohn algorithm applied to the sequence in the
time-domain can determine if it has all its zeros inside the
unit circle [18]. For experimental data having a Cole-type
impedance function, if R? = 0, for any s0, or a [ (0, 1),
the phase/modulus retrieval algorithm is not able to retrieve
a unique correct phase or modulus.
There is another method to evaluate if data obtained from
a Cole-type function satisfy the algorithm constraints. This
would be done by sampling the distribution function G(s) in
Eq. 4, and numerically calculating the resulting sum of first-
order processes, and their poles and constants, to obtain the
Cole impedance in a rational form over a limited frequency
interval, in a method called singularity decomposition [23].
ZCole(s) could be represented in this case by a finite sum-
mation of partial fractions having single-poles, that could
produce an approximation to ZCole(x) with a high degree of
accuracy [11]. After this procedure, the approximating
function could be subject to the Schur–Cohn algorithm to
detect if it satisfies the algorithm constraints.
2.4 Algorithm description
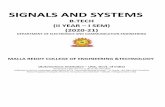
The algorithm is based on the flowchart in Fig. 2. The first
block represents the initialization procedure, where the
modulus in the phase retrieval algorithm can be provided by
electronic means or by simulating the samples, as in this
section. A vector containing the N modulus samples equally
spaced in frequency is saved in YORðkÞj j and a vector that
contains the estimated phase samples is initialized with
random values. The initial impedance Fourier transform
spectrum is a vector represented by the N values, YORðkÞ ¼YORðkÞj jejhest : In the following block, the real part of an
M-point inverse Fast-Fourier transform (IFFT) algorithm is
used to produce a sequence in the time-domain. An M-point
IFFT is used, where the constraint M C 2N guarantees the
algorithm convergence in the determination of the spec-
trum. Only the real part of the M-point IFFT is used because
signal is real in the time-domain [24], and a real signal has
an even Fourier transform modulus, allowing only N sam-
ples to represent the bioimpedance spectrum. In the mod-
ulus retrieval flowchart, phase must be exchanged for
modulus and vice-versa. The fourth block imposes causality
and a finite length constraint on the time-domain sequence,
setting to zero the samples yest(n) that do not belong to the
set Saest ¼ yestð0Þ; . . .; yestðN � 1Þf g: Causality and finite
length are necessary constraints on the sequence to which
one applies the phase-retrieval algorithm. The M-point FFT
of the set Saest produces the first estimate of the impedance
spectrum. This whole process is repeated until the root-
mean square value of the difference between two consec-
utive estimated vectors is less than the loop stopping
parameter value, e. The loop stopping parameter was set
equal to � = 10-6, which is a lower value than the neces-
sary resolution in the modulus or phase values in EIS sys-
tems. The length of input sequences to the algorithm is a
power of 2, since the iterative solution to the problem is
based on the use of uniformly spaced samples [24] and the
Fast-Fourier Transform (FFT) radix-2 algorithm.
2.5 Validation of the algorithm with a known electrical
impedance
In order to validate the algorithm with a practical application,
a multi-channel EIS system developed at the laboratory of
electronic instrumentation at the Santa Catarina State Uni-
versity was used to measure a known transfer impedance
spectrum from an RC circuit. In this case, a circuit formed by
a resistance, R = 1000.35 X in parallel with a capacitance,
C = 1 nF, was used and the modulus retrieval algorithm was
implemented using the acquired phase as the input data. In
the experiment conducted, 28 samples of the spectrum were
acquired with the implemented EIS system and linear
interpolation was used to enlarge the sequence to N = 64
points. Since the circuit is a first-order system, it was con-
sidered that, to demonstrate the applicability of the algorithm
in this case, a linear interpolation was a reasonable choice to
enlarge the sequence size of this spectrum. As a conse-
quence, some of the error produced in the modulus recon-
struction is due to this procedure.
2.5.1 EIS system for the experimental procedure
The hardware used in the experiment is based on an EIS
technique consisting of injecting a current into a load by two
electrodes, measuring its potential by two other electrodes
yest(n)=0
y (n)est
M-pointIFFT
Y (k)=|Y (k)|eOR OR
j (k)est
M-pointFFT
Y (k)=|Y (k)|eest+1 est
j est (k)
|Y (k)| |Y (k)|est OR
Y (k)=|Y (k)|eest+1 OR
j est (k)
simulatedmagnitude
Y| (k)|OR
(k) (k)est random
(k) (k)<-est est+1
Fig. 2 Flowchart representing the processing steps in the phase-
retrieval algorithm for the EIS system
Med Biol Eng Comput (2009) 47:1093–1102 1097
123

and then calculating the transfer impedance. In this circuit,
both phase and modulus are acquired from the load, even
though the purpose of the algorithm is to demonstrate that
one of such acquisition modules may become unnecessary
if the algorithm is applicable. The complete diagram of the
EIS system is shown in Fig. 3. The output of the Voltage-
Controlled-Current-Source (VCCS) is a multi-frequency
sinusoidal current with a constant amplitude of 1 mA.
Injecting current and measured potential are both multi-
plexed into eight output channels. The voltage measure-
ments are done by the Instrumentation Amplifier (IA). The
multi-frequency sine-wave signal (OSC) is generated by a
Direct Digital Synthesizer (DDS). A phase detector circuit
was built to identify the phase shift of the system and then to
supply an output DC voltage proportional to the phase
across the load (RC circuit). The modulus and phase of the
load are both sampled by the kit’s analog-to-digital con-
verters. A graphical interface was developed with MAT-
LAB for acquisition data control by a RS-232 link.
Although the modulus and phase of the load are electroni-
cally obtained, one of the parameters can be used to
experimentally validate the technique by comparing the
estimated and measured values.
3 Results
White gaussian noise was added to the simulated modulus
spectrum of the 2R1C circuit impedance function, causing
the modulus-to-noise ratio (SNR) to be 30, 50, and 80 dB.
In the upper plot of Fig. 4, the phase retrieved by the
algorithm for three different SNR is shown; in the graph
below, the absolute error between the original noiseless
phase and the estimated phase curves are depicted as a
function of the normalized frequency. The error curve for
the phase associated with the noiseless modulus shows the
intrinsic error in the reconstruction without any distortion
caused by noise in the process. Additional noisy simulated
modulus spectra were used to evaluate how many iterations
would be necessary to provide the required estimate. The
number of iterations and the error between the original
simulated signal and the final estimated phase are depicted
in two graphs in Fig. 5 as a function of the SNR, for
sequences of lengths N = 32, 64, 128, 256, 512, 1024.
Fig. 3 EIS system complete diagram for multi-channel evaluation of
electrical bioimpedances
-0.8
-0.4
0.0
0.0 0.7 1.4 2.1 2.8 3.5
0
8
16
RELATIVE ESTIMATION ERROR FOR MNR=30dB RELATIVE ESTIMATION ERROR FOR MNR=50dB RELATIVE ESTIMATION ERROR FOR MNR=80dB
θ (r
ad
)
ORIGINAL SIMULATED PHASE ESTIMATED PHASE WITH MNR=30dB ESTIMATED PHASE WITH MNR=50dB ETIMATED PHASE WITH MNR=80dB
NORMALIZED FREQUENCY (rad/s)
ER
RO
R (
%P
HA
SE)
Fig. 4 In the upper graph, simulated and estimated phase spectrum
under different modulus-to-noise ratios, 30, 50 and 80 dB. Below, the
absolute error as a function of normalized frequency for the depicted
phase
15 30 45 60
05
1015202530
1224364860728496
108
ME
AN
PH
AS
E E
RR
OR
(%
of m
axim
um p
hase
)
SNR (dB)
NU
MB
ER
OF
ITE
RA
TIO
NS
N=32 samples N=64 samples N=128 samples N=256 samples N=512 samples N=1024 samples
Fig. 5 In the upper graph, the necessary number of iterations for the
algorithm to reach e\ 10-6 as a function of SNR and for different
sequence lengths, N = 32, 64, 128, 256, 512,1024; below, the error in
the reconstruction of phase as a function of the SNR and sequence
length, N
1098 Med Biol Eng Comput (2009) 47:1093–1102
123
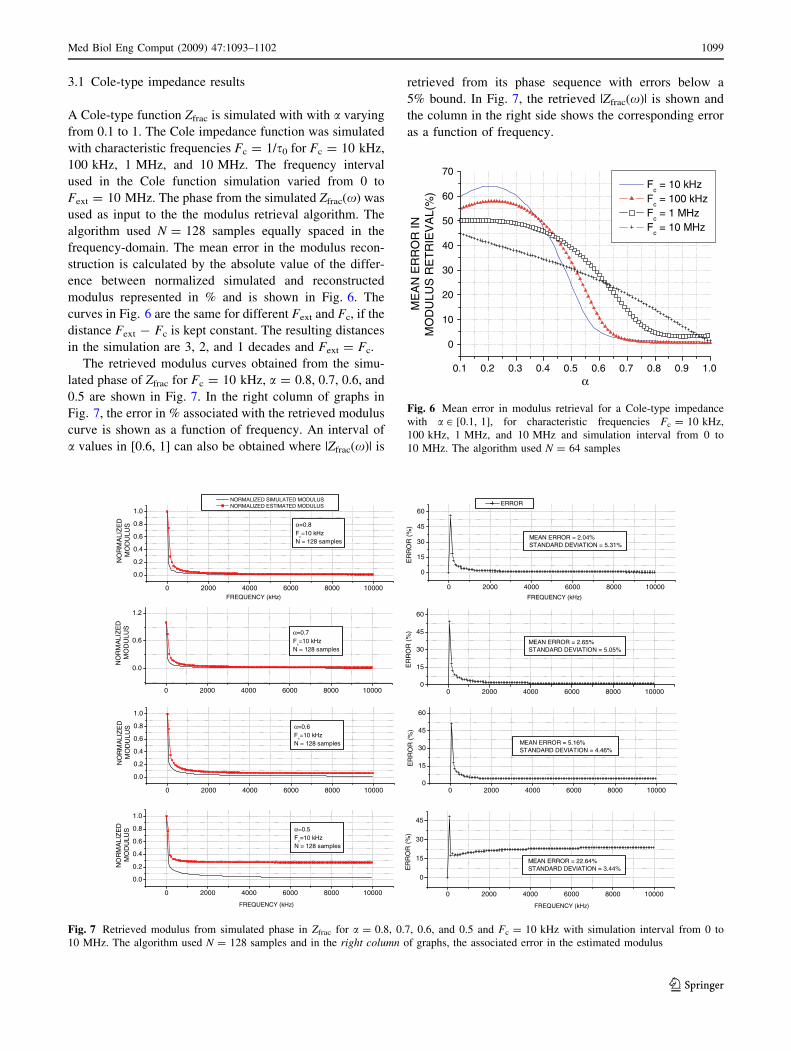
3.1 Cole-type impedance results
A Cole-type function Zfrac is simulated with with a varying
from 0.1 to 1. The Cole impedance function was simulated
with characteristic frequencies Fc = 1/s0 for Fc = 10 kHz,
100 kHz, 1 MHz, and 10 MHz. The frequency interval
used in the Cole function simulation varied from 0 to
Fext = 10 MHz. The phase from the simulated Zfrac(x) was
used as input to the the modulus retrieval algorithm. The
algorithm used N = 128 samples equally spaced in the
frequency-domain. The mean error in the modulus recon-
struction is calculated by the absolute value of the differ-
ence between normalized simulated and reconstructed
modulus represented in % and is shown in Fig. 6. The
curves in Fig. 6 are the same for different Fext and Fc, if the
distance Fext - Fc is kept constant. The resulting distances
in the simulation are 3, 2, and 1 decades and Fext = Fc.
The retrieved modulus curves obtained from the simu-
lated phase of Zfrac for Fc = 10 kHz, a = 0.8, 0.7, 0.6, and
0.5 are shown in Fig. 7. In the right column of graphs in
Fig. 7, the error in % associated with the retrieved modulus
curve is shown as a function of frequency. An interval of
a values in [0.6, 1] can also be obtained where |Zfrac(x)| is
retrieved from its phase sequence with errors below a
5% bound. In Fig. 7, the retrieved |Zfrac(x)| is shown and
the column in the right side shows the corresponding error
as a function of frequency.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
0
10
20
30
40
50
60
70 F
c = 10 kHz
Fc = 100 kHz
Fc = 1 MHz
Fc = 10 MHz
ME
AN
ER
RO
R IN
MO
DU
LUS
RE
TR
IEV
AL(
%)
α
Fig. 6 Mean error in modulus retrieval for a Cole-type impedance
with a [ [0.1, 1], for characteristic frequencies Fc = 10 kHz,
100 kHz, 1 MHz, and 10 MHz and simulation interval from 0 to
10 MHz. The algorithm used N = 64 samples
0 2000 4000 6000 8000 10000
0.0
0.6
1.2
0 2000 4000 6000 8000 100000
15
30
45
60
0 2000 4000 6000 8000 10000
0.0
0.2
0.4
0.6
0.8
1.0
0 2000 4000 6000 8000 10000
0
15
30
45
0 2000 4000 6000 8000 10000
0.0
0.2
0.4
0.6
0.8
1.0
0 2000 4000 6000 8000 100000
15
30
45
60
0 2000 4000 6000 8000 10000
0.0
0.2
0.4
0.6
0.8
1.0
0 2000 4000 6000 8000 10000
0
15
30
45
60
α=0.7 F
c=10 kHz
N = 128 samples
NORMALIZED SIMULATED MODULUS NORMALIZED ESTIMATED MODULUS
NO
RM
ALI
ZE
D
MO
DU
LUS
MEAN ERROR = 2.65%STANDARD DEVIATION = 5.05%
ERROR
ER
RO
R (
%)
α=0.5 F
c=10 kHz
N = 128 samples
NO
RM
ALI
ZE
D
MO
DU
LUS
MEAN ERROR = 22.64%STANDARD DEVIATION = 3.44%E
RR
OR
(%
)
α=0.6F
c=10 kHz
N = 128 samples
NO
RM
ALI
ZE
D
MO
DU
LUS
MEAN ERROR = 5.16%STANDARD DEVIATION = 4.46%
ER
RO
R (
%)
α=0.8 F
c=10 kHz
N = 128 samples
NO
RM
ALI
ZE
D
MO
DU
LUS
FREQUENCY (kHz) FREQUENCY (kHz)
FREQUENCY (kHz)
MEAN ERROR = 2.04%STANDARD DEVIATION = 5.31%
FREQUENCY (kHz)
ER
RO
R (
%)
Fig. 7 Retrieved modulus from simulated phase in Zfrac for a = 0.8, 0.7, 0.6, and 0.5 and Fc = 10 kHz with simulation interval from 0 to
10 MHz. The algorithm used N = 128 samples and in the right column of graphs, the associated error in the estimated modulus
Med Biol Eng Comput (2009) 47:1093–1102 1099
123
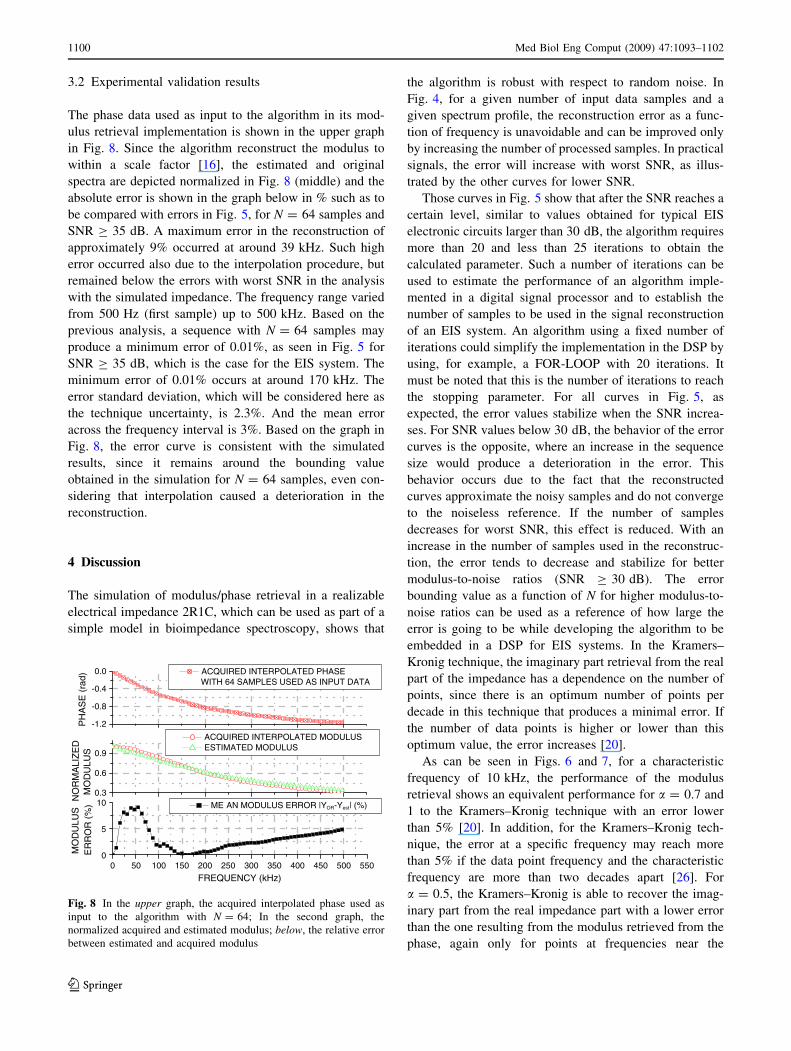
3.2 Experimental validation results
The phase data used as input to the algorithm in its mod-
ulus retrieval implementation is shown in the upper graph
in Fig. 8. Since the algorithm reconstruct the modulus to
within a scale factor [16], the estimated and original
spectra are depicted normalized in Fig. 8 (middle) and the
absolute error is shown in the graph below in % such as to
be compared with errors in Fig. 5, for N = 64 samples and
SNR C 35 dB. A maximum error in the reconstruction of
approximately 9% occurred at around 39 kHz. Such high
error occurred also due to the interpolation procedure, but
remained below the errors with worst SNR in the analysis
with the simulated impedance. The frequency range varied
from 500 Hz (first sample) up to 500 kHz. Based on the
previous analysis, a sequence with N = 64 samples may
produce a minimum error of 0.01%, as seen in Fig. 5 for
SNR C 35 dB, which is the case for the EIS system. The
minimum error of 0.01% occurs at around 170 kHz. The
error standard deviation, which will be considered here as
the technique uncertainty, is 2.3%. And the mean error
across the frequency interval is 3%. Based on the graph in
Fig. 8, the error curve is consistent with the simulated
results, since it remains around the bounding value
obtained in the simulation for N = 64 samples, even con-
sidering that interpolation caused a deterioration in the
reconstruction.
4 Discussion
The simulation of modulus/phase retrieval in a realizable
electrical impedance 2R1C, which can be used as part of a
simple model in bioimpedance spectroscopy, shows that
the algorithm is robust with respect to random noise. In
Fig. 4, for a given number of input data samples and a
given spectrum profile, the reconstruction error as a func-
tion of frequency is unavoidable and can be improved only
by increasing the number of processed samples. In practical
signals, the error will increase with worst SNR, as illus-
trated by the other curves for lower SNR.
Those curves in Fig. 5 show that after the SNR reaches a
certain level, similar to values obtained for typical EIS
electronic circuits larger than 30 dB, the algorithm requires
more than 20 and less than 25 iterations to obtain the
calculated parameter. Such a number of iterations can be
used to estimate the performance of an algorithm imple-
mented in a digital signal processor and to establish the
number of samples to be used in the signal reconstruction
of an EIS system. An algorithm using a fixed number of
iterations could simplify the implementation in the DSP by
using, for example, a FOR-LOOP with 20 iterations. It
must be noted that this is the number of iterations to reach
the stopping parameter. For all curves in Fig. 5, as
expected, the error values stabilize when the SNR increa-
ses. For SNR values below 30 dB, the behavior of the error
curves is the opposite, where an increase in the sequence
size would produce a deterioration in the error. This
behavior occurs due to the fact that the reconstructed
curves approximate the noisy samples and do not converge
to the noiseless reference. If the number of samples
decreases for worst SNR, this effect is reduced. With an
increase in the number of samples used in the reconstruc-
tion, the error tends to decrease and stabilize for better
modulus-to-noise ratios (SNR C 30 dB). The error
bounding value as a function of N for higher modulus-to-
noise ratios can be used as a reference of how large the
error is going to be while developing the algorithm to be
embedded in a DSP for EIS systems. In the Kramers–
Kronig technique, the imaginary part retrieval from the real
part of the impedance has a dependence on the number of
points, since there is an optimum number of points per
decade in this technique that produces a minimal error. If
the number of data points is higher or lower than this
optimum value, the error increases [20].
As can be seen in Figs. 6 and 7, for a characteristic
frequency of 10 kHz, the performance of the modulus
retrieval shows an equivalent performance for a = 0.7 and
1 to the Kramers–Kronig technique with an error lower
than 5% [20]. In addition, for the Kramers–Kronig tech-
nique, the error at a specific frequency may reach more
than 5% if the data point frequency and the characteristic
frequency are more than two decades apart [26]. For
a = 0.5, the Kramers–Kronig is able to recover the imag-
inary part from the real impedance part with a lower error
than the one resulting from the modulus retrieved from the
phase, again only for points at frequencies near the
0.3
0.6
0.9
-1.2
-0.8
-0.4
0.0
0 50 100 150 200 250 300 350 400 450 500 5500
5
10
ACQUIRED INTERPOLATED MODULUS ESTIMATED MODULUS
NO
RM
ALI
ZE
D
MO
DU
LUS
PH
AS
E (
rad)
ACQUIRED INTERPOLATED PHASE WITH 64 SAMPLES USED AS INPUT DATA
ME AN MODULUS ERROR |YOR-Yest| (%)
MO
DU
LUS
ER
RO
R (
%)
FREQUENCY (kHz)
Fig. 8 In the upper graph, the acquired interpolated phase used as
input to the algorithm with N = 64; In the second graph, the
normalized acquired and estimated modulus; below, the relative error
between estimated and acquired modulus
1100 Med Biol Eng Comput (2009) 47:1093–1102
123

characteristic frequency. In the modulus retrieval error
using the algorithm, it depends on the characteristic fre-
quency as shown in Fig. 6. When the average relaxation
constant s0 is varied, mean errors of more than 5% are
obtained when Fext - Fc is less than two decades. In
addition, there is an interval of a for which the modulus is
retrieved with a limited error in the modulus retrieval. In
this case, for a [ (0.6, 1) and R? & 0, the modulus
retrieval process produces an error with the same order of
magnitude or less if compared with the errors in the Kra-
mers–Kronig technique for R? = 0. Both techniques are
dependent on the characteristic frequency distance from the
maximum frequency of the input data points, Fext, and
show reconstruction mean errors of the same order of
magnitude for a [ (0.6, 1). However, the error is more
uniformly distributed for the modulus retrieval algorithm,
where the high frequency impedance value was R? = 0.
This indicates the main drawback of this technique, that
requires the set of algorithms constraints to be satisfied.
This would limit the applicability of the algorithm to a
specific class of impedance functions. In Fig. 7 a higher
error in the low frequency interval is observed, which in a
practical case may be considered less relevant, since
experimental data are usually obtained at frequencies
higher than hundreds of Hz. At higher frequencies, the
error is uniform and stable, increasing only for a values
outside the interval (0.6, 1), as depicted in the other graphs.
With respect to the numerical methods involved in
retrieving modulus or imaginary data from the provided
input, it is easy to observe that the modulus retrieval
algorithm has a much more optimized code if compared to
the direct numerical integration required in the Kramers–
Kronig technique.
For the case of practical and simpler impedance func-
tions with a single pole, an experimental electrical
impedance was measured with the previously described
EIS apparatus. The measurement was performed in a sin-
gle-pole minimum-phase impedance having an equivalent
impedance spectrum that satisfies only the modulus
retrieval algorithm producing a reconstructed modulus with
an error compatible with simulated data error curves with
SNR [ 30 dB. With this experimental impedance, the
phase retrieval algorithm was not able to produce a unique
set of phase data. In this case, the equivalent transfer
impedance contains stray capacitances from cables and
instrumentation circuits and the algorithm constraints are
not satisfied due to the presence of such capacitances. This
illustrates an important issue to consider when using the
values from a measured equivalent transfer impedance
resulting from the combination of skin-electrode, stray
capacitances and cable impedances. When special elec-
trodes are required in the application to produce low and
uniform current densities at the skin-electrode interface
[22] as in EIT to monitor the brain [9], and, in addition to
that, the phase/modulus retrieval algorithm is intended to
be used, the resulting measured impedance may cause the
obtained transfer-impedance not to satisfy the algorithm
constraints.
5 Conclusions
Experimental and theoretical validation of a new technique
to reconstruct the transfer impedance spectrum from partial
acquired information were demonstrated. To the authors’
knowledge it is the first time this well known algorithm is
proposed to be used as a reconstruction technique in EIS
systems. Performance analysis of the algorithm with typi-
cal simulated bioimpedance data and using EIS experi-
mental data from a known RC circuit was implemented.
The curves showing the algorithm performance in terms of
number of iterations for convergence with typical imped-
ance data can be used as parameters to develop the soft-
ware to be implemented in DSPs in practical and less
complex EIS systems, since the use of the algorithm may
obviate parts of the EIS circuits. The results demonstrate
the limitations and applicability of the modulus and phase
retrieval algorithm in EIS by showing that the widely used
Cole-type impedance function must be suitably used when
the impedance data does not satisfy the algorithm con-
straints. The algorithm is shown to be independent of the
number of spectrum samples when this number is suffi-
ciently high, differing from the Kramers–Kronig technique.
With respect to performance in reconstruction, a compar-
ison of impedance reconstruction using Kramers–Kronig
technique and modulus retrieval, not considering that
R? = 0 in the former and R? = 0 in the latter, shows that
both techniques perform equivalently. Consistency of
simulated and experimental results has also been demon-
strated, since no significant discrepancy between theoreti-
cal and experimental validation has been observed for a
known single-pole electrical impedance spectrum obtained
with an EIS setup.
With respect to the engineering applications of the
algorithm in electrical impedance tomography (EIT), some
suggestions can be provided. Many image reconstruction
systems based on EIT use single-frequency conductivity
data to reconstruct relative images, while a true absolute
image would require also phase information. In order to use
the discussed algorithm to attempt the phase retrieval of a
set of values, the first point to consider is to use a multi-
frequency excitation of electrodes to calculate data asso-
ciated with the conductivity measurements. This multi-
frequency excitation would characterize the use of EIT
spectroscopy [28]. The next step would be the analysis of
typical conductivity data obtained in EIT such as to verify
Med Biol Eng Comput (2009) 47:1093–1102 1101
123

if the obtained data satisfy the algorithm constraints. For
validation purposes of this application, at least one set of
data from the phase and magnitude (or the imaginary and
real part) of conductivity should be obtained. In the case of
difference EIT, the conductivity change and its corre-
sponding phase would be calculated. In general, the algo-
rithm may be employed in the retrieval of the phase from
the estimated difference conductivities in EIT in each
reconstructed frame. Given that the proposed algorithm is
computationally optimized being based on Fast-Fourier
transform algorithms, and the use of the algorithm in the
data set is permissible, the first potential use of the algo-
rithm in difference EIT reconstruction techniques, as, for
example, in the technique described in [6], could be the
application of phase-retrieval in the conductivity change
data.
As a work to be developed in the future remains the
analysis of the characterization of biological tissues data
under the standpoint of a minimum-phase sequence, and
also how skin-electrode, stray capacitances and cable
impedances may influence the algorithm response. The
results shown in this work have been obtained mainly by
simulation, and demonstrate that the reconstruction may
work with irrational functions, even considering that the
algorithm was originally developed for rational functions.
Experimental data based on the systematic analysis of
biological tissue in other EIS and EIT systems will also be
analyzed in a future work.
References
1. Aberg P, Nicander I, Hansson J, Geladi P, Holmgren U, Ollmar S
(2004) Skin cancer identification using multifrequency electrical
impedance—a potential screening tool. IEEE Trans Biomed Eng
51:2097–2102
2. Bertemes-Filho P (2002) Tissue characterisation using an
Impedance Spectroscopy Probe. PhD Thesis, The University of
Sheffield, UK
3. Brown BH (2003) Electrical impedance tomography (EIE): a
review. J Med Eng Technol 3:97–108
4. Cole KS (1940) Permeability and impermeability of cell mem-
branes for ions. In: Proceedings of the Cold Spring Harbor
Symposia, vol 8, pp 110–122
5. Cole KS, Cole RH (1941) Dispersion and absorption in dielec-
trics: I Alternating current characteristics. J Chem Phys 9:97–108
6. Dai T, Soleimani M, Adler A (2008) EIT image reconstruction
with four dimensional regularization. Med Biol Eng Comput
46(9):889–999
7. Debye P (1929–Reprint:1965) Polar molecules. Dover Publica-
tions, New York
8. Fuoss R, Kirkwood JG (1941) Electrical properties of solids.
VIII. Dipole moments in polyvinyl chloride-diphenyl systems.
J Am Chem Soc 63(2):385–394
9. Gilad O, Horesh L, Holder DS (2007) Design of electrodes and
current limits for low frequency electrical impedance tomography
of the brain. Med Biol Eng Comput 45(7):621–633
10. Grimnes S, Martinsen OG (2008) Bioimpedance and bioelec-
tricity: basics, 2nd edn. Academic Press, London
11. Haschka M, Krebs V (2007) Advances in fractional calculus the-
oretical developments and applications in physics and engineering,
chap. A direct approximation of fractional cole-cole systems by
ordinary first-order processes. Springer, Netherlands, pp 257–270
12. Hayes M, Lin JS, Oppenheim AV (1980) Signal reconstruction
from phase or magnitude. IEEE Trans Acoust Speech ASSP
28:672–680
13. Holder DS (2004) Electrical impedance tomography: methods,
history and applications, 1st edn. Taylor and Francis, New York
14. McAdams ET, Jossinet J (1996) Problems in equivalent circuit
modelling of the electrical properties of biological tissues. Bio-
electrochem Bioenerg 40:147–152
15. Nebuya S, Noshiro M, Brown BH, Smallwood RH, Milnes P
(2002) Accuracy of an optically isolated tetra-polar impedance
measurement system. Med Biol Eng Comput 40:647–650
16. Oppenheim AV, Lin JS, Curtis S (1983) Signal synthesis and
reconstruction from partial Fourier domain information. J Opt
Soc Am 73:1413–1420
17. Proakis JG, Manolakis DK (1996) Discrete-time signal process-
ing, 3rd edn. Prentice-Hall, Boston, pp 617–681
18. Proakis JG, Manolakis DK (1996) Discrete-time signal process-
ing, 3rd edn. Prentice-Hall, Boston, pp 213–215
19. Quartieri T, Oppenheim AV (1981) Iterative techniques for
minimum phase signal reconstruction from phase or magnitude.
IEEE Trans Acoust Speech ASSP 29:1187–1193
20. Riu PJ, Lapaz C (1999) Practical limits of the Kramers-Kronig
relationships applied to experimental bioimpedance data. Ann
NY Acad Sci 873:374–380
21. Seoane F, Ferreira J, Sanchez JJ, Bragos R (2008) An analog
front-end enables electrical impedance spectroscopy system on-
chip for biomedical applications. Physiol Meas 29:267–278
22. Suesserman MF, Spelman FA, Rubinstein JT (1991) In vitro mea-
surement and characterization of current density profiles produced by
non-recessed, simple-recessed, and radially varying recessed stim-
ulating electrodes. IEEE Trans Biomed Eng 38(5):401–408
23. Sun H, Charef A, Tsao Y, Onaral B (1992) Analysis of polari-
zation dynamics by singularity decomposition method. Ann
Biomed Eng 20:321–335
24. Tom VT, Quartieri T, Hayes MH, McClellan JH (1981) Con-
vergence of iterative nonexpansive signal reconstruction algo-
rithms. IEEE Trans Acoust Speech ASSP 29:1052–1058
25. Tribolet J (1977) A new phase unwrapping algorithm. IEEE
Trans Acoust Speech ASSP-25:170–177
26. Waterworth AR (2000) Data analysis techniques of measured
biological impedance. PhD Thesis, The University of Sheffield, UK
27. Yang Y, Wang J (2005) A Design of bioimpedance spectrometer
for early detection of pressure ulcer. In: Proceedings of the IEEE
engineering in medicine and biology 27th annual conference.
Shanghai, China, pp 6602–6604
28. Yerworth RJ, Bayford RH, Brown B, Milnes PM, Conway M,
Holder DS (2003) Electrical impedance tomography spectros-
copy (EITS) for human head imaging. Physiol Meas 24:477–489
1102 Med Biol Eng Comput (2009) 47:1093–1102
123