Fast and Efficient Two-Dimensional DOA Estimation for ... - MDPI
Upload
independentCategory
view
1download
0
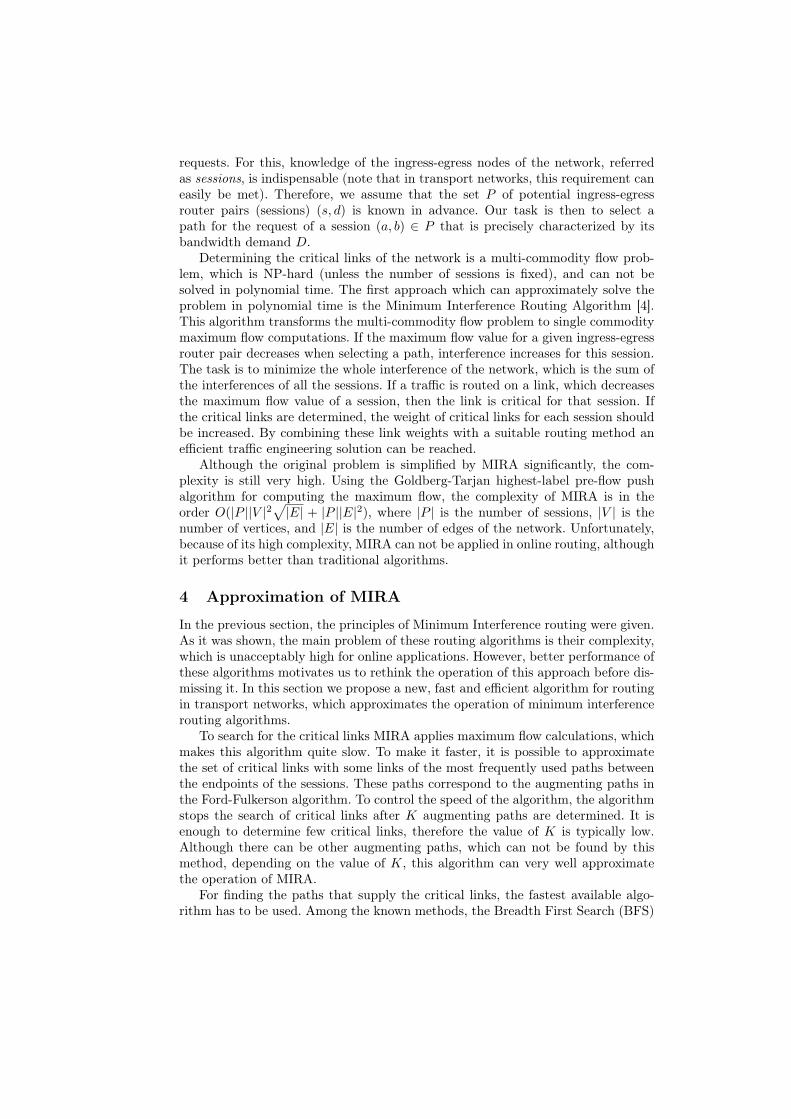
FMIRA: A Fast and Efficient Traffic EngineeringMethod for Transport Networks1
Péter Fodor, Gábor Enyedi, Tibor Cinkler2
High Speed Networks LaboratoryDepartment of Telecommunications and Media Informatics
Budapest University of Technology and EconomicsH-1117, Magyar Tudósok körútja 2., Budapest, Hungary
{fodorp,enyedi,cinkler}@tmit.bme.huTelephone: +36–1463–4391, Fax: +36–1463–1763
Abstract. Link weight setting methods are well recognized to increasethe throughput of routing in modern transport networks. Minimum inter-ference routing algorithms provide better performance by selecting a pathwith links, which cause the least interference with potential future requests.Although, by saving these critical links for each ingress-egress router pair,these algorithms perform better, the computational complexity is significantand minimum interference routing is not, or just with restrictions, applica-ble for online routing. In this paper, taking advantage of characteristics oftransport networks we set up FMIRA, a new fast and efficient online pathselection algorithm, which reduces the interference on the most frequentlyused links in the network. We prove that the complexity of our algorithmtheoretically approximates that of Dijkstra’s shortest path algorithm. Insimulation studies we show that our algorithm performs similarly to min-imum interference routing, while it is almost as fast as Dijkstra’s shortestpath algorithm, manifesting a fruitful compromise.
1 Introduction and Backgrounds
Traffic Engineering is the discipline dealing with the reliable and economical opti-mization of network utilization. This goal is achieved by characterization, modelingand controlling of traffic. While traffic engineering is getting more and more impor-tant in traditional IP-based (Internet Protocol) networks, in transport networks –such as optical core or MPLS (Multi Protocol Label Switching) backbone networks– it received much less attention.
In these networks, finding decent routes is much more important than in packetswitched ones. Since, in order to guarantee the bandwidth, the required capacityis reserved on the links of the selected path, there is a chance that the network cannot serve a demand, and it has to be blocked. Of course minimizing this chance isvery important.
1 This work has been done as a part of the European sixth framework research projectIP NOBEL (www.ist-nobel.org).
2 The author has been supported by the OTKA postdoctoral grant D42211 and by theJános Bólyai postdoctoral scholarship.

Unfortunately, the performance of traditional routing methods – such as Short-est Path (SP) [1], Widest Shortest Path (WSP) [2] or Shortest Widest Path (SWP)[3] – is not sufficient. One of the possible solutions is the so called Minimum In-terference Routing [4] discipline. Minimum interference routing algorithms – byexploiting the knowledge on the potential communicating node-pairs in the net-work – try to avoid using highly critical links, which are essential for serving thefuture requests of these communicating node pairs. Although several methods havebeen proposed based on this principle, most of them can not be used in onlineapplications due to their high computation complexity. In our study we focus onreducing this complexity, while simultaneously keeping the blocking probabilityreasonably low.
The first minimum interference routing algorithm, called MIRA, is proposedin [4]. In this paper, the authors laid down the basics of minimum interferencerouting and defined the notion of interference. Using flow theory they showed howto determine the critical links of the network for each source-destination pair. Then,setting the weight of these critical links to a high value and selecting the shortestpath over the emergent link weights, MIRA promises with finding a path of minimalinterference.
There exist some extensions based on minimum interference routing. In [5] theauthors propose an integrated admission control and path selection scheme. Thisalgorithm is based on the knowledge of traffic profile of ingress-egress pairs in thenetwork. Although its complexity is less than that of MIRA, the profile of networktraffic can not be determined easily. In [7] the authors use a more general notionof link criticality to pre-compute criticality information for routing a number ofsubsequent requests. A definition of link criticality providing a finer resolution canbe found in [8]. The links of the network are classified into different criticality classesdepending on their criticality. Integer linear programming is used in [9] to maximizethe minimum flow value of each ingress-egress router pair simultaneously, and thesetting of the link weights happens online according to residual capacity of the links.All these solutions improve on the performance of MIRA but, at the same time,they suffer from high computational requirements. To remedy this shortcoming,a sophisticated link weighting method is proposed in [10]. This scheme does notconsider the interference between other source-destination pairs. The weight of linksis computed as a function of the residual network and link capacity, therefore thisalgorithm is reasonably fast.
A well-known drawback of minimum interference routing algorithms is its lengthycomputational time. However, the online routing in modern transport networks can-not tolerate long calculations. In order to further facilitate online routing, in thispaper, we propose a fast link weight setting algorithm, which promises with uni-fying the simplicity and rapidness of Dijkstra’s shortest path algorithm, while alsotries to maintain all the relevant features – beyond all, the low blocking probability– of minimum interference routing. Our algorithm is specifically aimed at moderntransport networks, since, as shall be shown, its additional complexity, comparedto the complexity of Dijsktra’s algorithm, amortizes in such networks.
In section 2 we sum up the main characteristics of transport networks. In sec-tion 3 we survey the idea of the minimum interference routing, and describe thefirst algorithm on it, called MIRA. In section 4 we propose our algorithm. Usingmathematical formulation we prove that its complexity makes this algorithm ap-

plicable for online routing. In section 5 we evaluate the performance and executiontime of the traditional routing methods compared to our algorithm by extensivesimulation studies. Finally, in section 6 we briefly summarize the conclusions.
2 Transport Networks
Application of MPLS in transport networks is fundamental for the service providersto efficiently engineer the traffic. An MPLS LSP (Label Switched Path) suppliesbandwidth-guaranteed channel, over which user data (mostly showing up as astream of IP packets) can be transmitted with a warranted Quality of Service. Atransport network is basically a core network in the service provider’s network, inwhich thousands and thousands of user MPLS LSPs are aggregated at the boundaryof the network into high-volume trunks. Traffic aggregation between the ingress-egress router pairs makes this network easily manageable, and it has advantage ofsmoothing out the bandwidth requirement across bursty streams.
Transport networks usually do not contain too many links between the nodes,so the respective graph topology easily classifies as a sparse graph [14]. Namely,the majority of the nodes is connected to some immediate neighbors, and commu-nication with distant nodes is only possible through more hops. Therefore, in atransport network the average degree of nodes is small, and the number of links inthe network is less than a low power of the number of nodes. Formally, for sparsegraphs O(|E|) << O(|V |k) holds, where 1 < k < 2, |E| is the number links and|V | is the number of nodes.
Interestingly, the traffic of transport networks is also special, since – as shownby measurements on actual traffic in [12] – 80% of traffic in a transport network isgenerated typically between 20% of the end nodes. We can safely assume that thetask of traffic engineering is confined to route these very high-traffic ingress-egressroute pairs. However we need to engineer this traffic very carefully due to its highvolume. Using the assumption of [12], we shall assume that the number of source-destination pairs is typically small in a transport network, so we can treat it as aconstant number, or at least, it does not depend on the size of the network. Weadopt this approach similarly to [6], [11].
Utilizing the sparse graph property of transport networks, and the attributethat the number of ingress-egress router pairs can be approximated with a con-stant number, our aim is to create a new routing algorithm based on the idea ofminimum interference routing, which avoids complicated flow computations, andwhose additive complexity amortizes compared to Dijkstra’s shortest path algo-rithm in a transport network.
3 Minimum Interference Routing
Let the network be modeled as a directed graph G(V, E). Let V be the set of nodes(|V | = n), E the set of edges (|E| = m) and let us define a positive function onedges with cij denoting the capacity of the corresponding link (i, j) ∈ E. It isan important question how the routing engine considers future requests in onlinerouting. Although these requests are unknown, the selected paths should avoidthose links, which may eventually turn out to be critical for the paths of future
requests. For this, knowledge of the ingress-egress nodes of the network, referredas sessions, is indispensable (note that in transport networks, this requirement caneasily be met). Therefore, we assume that the set P of potential ingress-egressrouter pairs (sessions) (s, d) is known in advance. Our task is then to select apath for the request of a session (a, b) ∈ P that is precisely characterized by itsbandwidth demand D.
Determining the critical links of the network is a multi-commodity flow prob-lem, which is NP-hard (unless the number of sessions is fixed), and can not besolved in polynomial time. The first approach which can approximately solve theproblem in polynomial time is the Minimum Interference Routing Algorithm [4].This algorithm transforms the multi-commodity flow problem to single commoditymaximum flow computations. If the maximum flow value for a given ingress-egressrouter pair decreases when selecting a path, interference increases for this session.The task is to minimize the whole interference of the network, which is the sum ofthe interferences of all the sessions. If a traffic is routed on a link, which decreasesthe maximum flow value of a session, then the link is critical for that session. Ifthe critical links are determined, the weight of critical links for each session shouldbe increased. By combining these link weights with a suitable routing method anefficient traffic engineering solution can be reached.
Although the original problem is simplified by MIRA significantly, the com-plexity is still very high. Using the Goldberg-Tarjan highest-label pre-flow pushalgorithm for computing the maximum flow, the complexity of MIRA is in theorder O(|P ||V |2
√|E| + |P ||E|2), where |P | is the number of sessions, |V | is the
number of vertices, and |E| is the number of edges of the network. Unfortunately,because of its high complexity, MIRA can not be applied in online routing, althoughit performs better than traditional algorithms.
4 Approximation of MIRA
In the previous section, the principles of Minimum Interference routing were given.As it was shown, the main problem of these routing algorithms is their complexity,which is unacceptably high for online applications. However, better performance ofthese algorithms motivates us to rethink the operation of this approach before dis-missing it. In this section we propose a new, fast and efficient algorithm for routingin transport networks, which approximates the operation of minimum interferencerouting algorithms.
To search for the critical links MIRA applies maximum flow calculations, whichmakes this algorithm quite slow. To make it faster, it is possible to approximatethe set of critical links with some links of the most frequently used paths betweenthe endpoints of the sessions. These paths correspond to the augmenting paths inthe Ford-Fulkerson algorithm. To control the speed of the algorithm, the algorithmstops the search of critical links after K augmenting paths are determined. It isenough to determine few critical links, therefore the value of K is typically low.Although there can be other augmenting paths, which can not be found by thismethod, depending on the value of K, this algorithm can very well approximatethe operation of MIRA.
For finding the paths that supply the critical links, the fastest available algo-rithm has to be used. Among the known methods, the Breadth First Search (BFS)
algorithm is one of the fastest, which determines the minhop path to any node ofa graph. After selecting the shortest path, the critical links should be determined,which will be the "narrowest" edges on this path. For this decision we can say thatour algorithm, called FMIRA (Fast Minimum Interference Routing Algorithm) isthe approximation of MIRA, since here we redefined the notion of critical links.Since BFS finds only one path between the source and destination in a given graph,it has to be executed subsequently on a modified graph. Here, modification of thegraph means the decrease of the capacity of the edges on the path by the capacityof the narrowest (bottleneck) edge. Then, BFS should be rerun on this modifiedgraph to select a new path. Applying this method recursively the critical edges ofMIRA are approximated by the edges of the paths found.
After determining the critical links for a given source-destination pair, it isnecessary to set the weight of the links, so that the weight reflects the criticalityof the link. Once a link is found in an augmenting path, the weight of its edges isincremented by w cap
btl , where cap is the free capacity of the link, btl is the capacityof the bottleneck edge(s) of the path and w is a constant number. We set the valueof w = 2, and we leave the weight of normal edges at the default value c = 0.01.
Fast Minimum Interference Routing Algorithm (FMIRA)
INPUT: A network G(V,E), in which a path has to be found, the capacity ofthe demand D, the set of sessions P and (a, b) ∈ P source-destination pairs of thedemand. We also assume that the maximum number of the paths per demand, K,is also a parameter of the algorithm.
OUTPUT: A route from a to b.STEPS:
1. Find K paths between (s, d) ∈ P\(a, b) with the BFS algorithm. After eachpath selection, decrease the capacity of the edges by the bottleneck capacity ofthe path. Remove from the graph all the edges, whose capacity reaches zero.
2. Compute the weights of the links with the following formula:
c + w∑
(s,d)∈P\(a,b)
K∑
i=1
∑
l∈Li
capl
btli, (1)
where c is the default weight for each link, w is a constant number, Li is the setof the edges of the ith path and btli is the capacity of the narrowest (bottleneck)edge in Li, capl is the capacity of link l.
3. Eliminate the links with free capacity less than D.4. Find a minimum weight path between a and b using Dijkstra’s shortest path
algorithm.
COMPLEXITY: The complexity of the first step is at most the complexityof finding K paths with the BFS algorithm. BFS finds one augmenting path inO(|E|+ |V |) time. Finding K paths for each ingress-egress router pair is thereforeO(K|P ||E| + K|P ||V |). There can be at most O(|E|) links in a path. Hence thecomplexity of the second step is O(K|P ||E|). The third step can be solved withchecking all the edges and eliminating some of them, if necessary. The complexity

of this step is O(|E|). For executing the last step, the execution of Dijkstra’s short-est path algorithm is needed. The complexity of this method is O(|V | log(|V |) +|E|). Hence the complexity of Fast Minimum Interference Routing Algorithm isO(K|P ||E|+ K|P ||V |+ |V | log(|V |)).
Theorem 1. The additional computational complexity of FMIRA, in comparisonto Dijkstra’s shortest path algorithm, amortizes in a transport network.
Proof: The complexity of FMIRA is O(K|P ||E| + K|P ||V | + |V | log(|V |)). Thenumber of searched paths K in critical link determination is a constant number.By our assumptions on transport networks, the number of sessions |P | can also betreated as a constant number. Moreover, both values are typically small numbers.Then the complexity of FMIRA is O(|E| + |V | + |V | log |V |), which is equals toO(|E| + |V | log |V |). In section 2 we showed that the transport networks can bemodeled by sparse graphs. From the definition of sparse graphs [14], O(E) <<O(|V |k), where 1 < k < 2, so the second part is the dominant and the complexityis O(|V | log(|V |)). The original complexity of Dijkstra’s shortest path algorithmO(|E|+ |V | log(|V |)) amortizes to O(|V | log(|V |)) in sparse networks as well.
As it turns out, this algorithm is a new, and yet unknown member of theSimple Minimum Interference Routing Algorithm (SMIRA) family. SMIRA is anapproximation of MIRA proposed by Iliadis et al. [6], which avoids flow computa-tions as well. SMIRA applies the more complex widest shortest path and shortestwidest path algorithm for determining the critical links of the sessions. Further-more, SMIRA introduces two cost assignment strategies based on whether criticalpath (Minimum Interference Path Avoidance – MI-PA) or bottleneck links (Min-imum Interference Bottleneck-Link-Avoidance – MI-BLA) should be avoided. Be-cause of its more complicated path selection, the complexity of these algorithmscan be as high as O(K|P ||E| + K|P ||V | log(|V |)). Additionally, LMIR [11] is an-other approximation of minimum interference routing algorithm, where L refers toits complexity, which is light. Although this algorithm performs similarly as MIRAand avoids flow computations by computing least capacity paths, the complexity ofthis approach is O(K|P ||E|+ K|P ||V |2), which is also slower, than the algorithmwe proposed.
5 Simulation Results
In the previous parts, the principles of the minimum interference routing algorithmswere introduced. The complexity of these methods can not be tolerated in onlinerouting. We proposed a new algorithm, which can tackle this problem meanwhilehaving efficient performance. In this section we present simulation results to verifythe theoretical findings.
For the simulations we used the COST266 European reference network topology[13], depicted in Fig. 1. We considered the network as a homogeneous network, sowe set the capacity of each link to the same value. We used Interrupted Poisson Pro-cess for generating traffic with Inter-arrival Times λ = 5 1
s . The holding times of thedemands followed exponential distribution with the mean value µ = 20s. The band-width requested by the demands followed uniform distribution with the value of 5
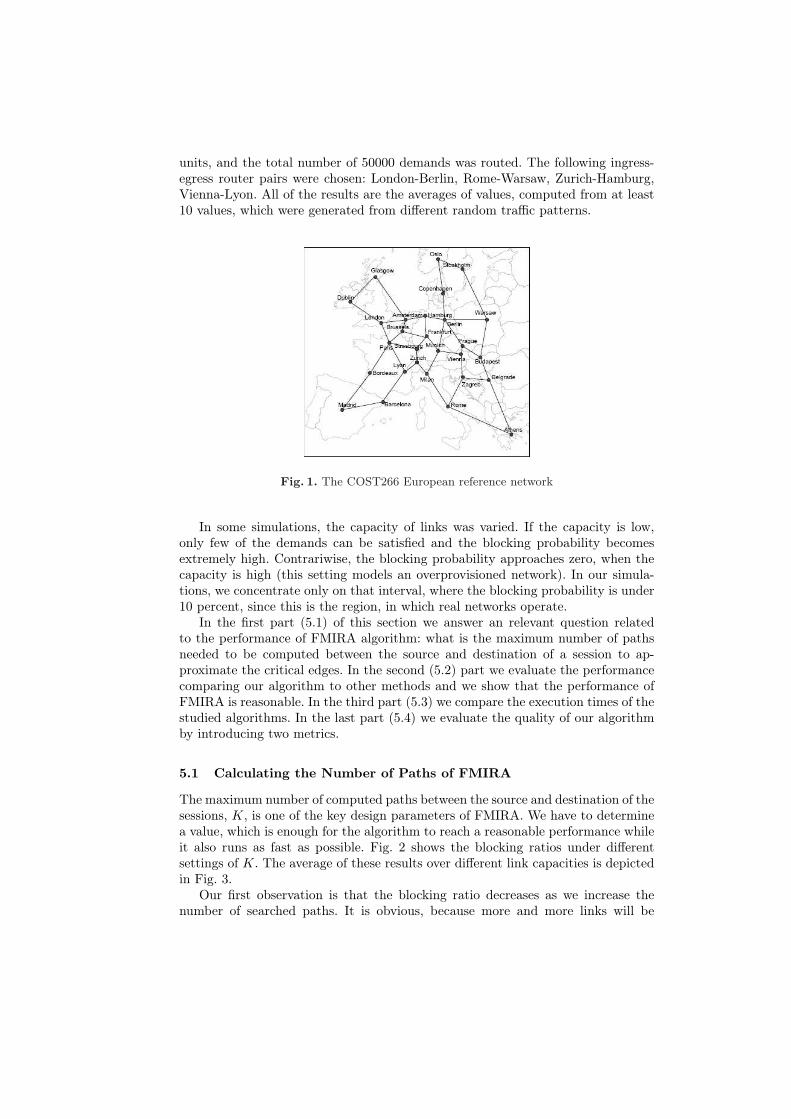
units, and the total number of 50000 demands was routed. The following ingress-egress router pairs were chosen: London-Berlin, Rome-Warsaw, Zurich-Hamburg,Vienna-Lyon. All of the results are the averages of values, computed from at least10 values, which were generated from different random traffic patterns.
Fig. 1. The COST266 European reference network
In some simulations, the capacity of links was varied. If the capacity is low,only few of the demands can be satisfied and the blocking probability becomesextremely high. Contrariwise, the blocking probability approaches zero, when thecapacity is high (this setting models an overprovisioned network). In our simula-tions, we concentrate only on that interval, where the blocking probability is under10 percent, since this is the region, in which real networks operate.
In the first part (5.1) of this section we answer an relevant question relatedto the performance of FMIRA algorithm: what is the maximum number of pathsneeded to be computed between the source and destination of a session to ap-proximate the critical edges. In the second (5.2) part we evaluate the performancecomparing our algorithm to other methods and we show that the performance ofFMIRA is reasonable. In the third part (5.3) we compare the execution times of thestudied algorithms. In the last part (5.4) we evaluate the quality of our algorithmby introducing two metrics.
5.1 Calculating the Number of Paths of FMIRA
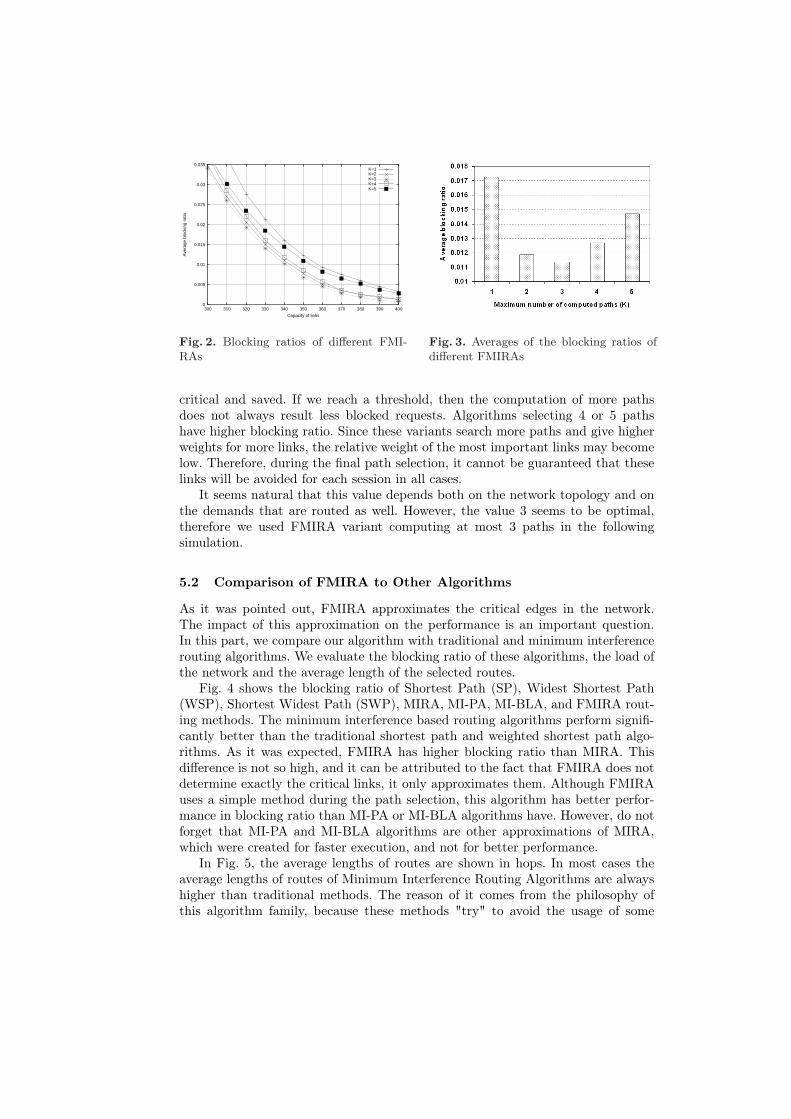
The maximum number of computed paths between the source and destination of thesessions, K, is one of the key design parameters of FMIRA. We have to determinea value, which is enough for the algorithm to reach a reasonable performance whileit also runs as fast as possible. Fig. 2 shows the blocking ratios under differentsettings of K. The average of these results over different link capacities is depictedin Fig. 3.
Our first observation is that the blocking ratio decreases as we increase thenumber of searched paths. It is obvious, because more and more links will be
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
400390380370360350340330320310300
Ave
rage
blo
ckin
g ra
tio
Capacity of links
K=1K=2K=3K=4K=5
Fig. 2. Blocking ratios of different FMI-RAs
Fig. 3. Averages of the blocking ratios ofdifferent FMIRAs
critical and saved. If we reach a threshold, then the computation of more pathsdoes not always result less blocked requests. Algorithms selecting 4 or 5 pathshave higher blocking ratio. Since these variants search more paths and give higherweights for more links, the relative weight of the most important links may becomelow. Therefore, during the final path selection, it cannot be guaranteed that theselinks will be avoided for each session in all cases.
It seems natural that this value depends both on the network topology and onthe demands that are routed as well. However, the value 3 seems to be optimal,therefore we used FMIRA variant computing at most 3 paths in the followingsimulation.
5.2 Comparison of FMIRA to Other Algorithms
As it was pointed out, FMIRA approximates the critical edges in the network.The impact of this approximation on the performance is an important question.In this part, we compare our algorithm with traditional and minimum interferencerouting algorithms. We evaluate the blocking ratio of these algorithms, the load ofthe network and the average length of the selected routes.
Fig. 4 shows the blocking ratio of Shortest Path (SP), Widest Shortest Path(WSP), Shortest Widest Path (SWP), MIRA, MI-PA, MI-BLA, and FMIRA rout-ing methods. The minimum interference based routing algorithms perform signifi-cantly better than the traditional shortest path and weighted shortest path algo-rithms. As it was expected, FMIRA has higher blocking ratio than MIRA. Thisdifference is not so high, and it can be attributed to the fact that FMIRA does notdetermine exactly the critical links, it only approximates them. Although FMIRAuses a simple method during the path selection, this algorithm has better perfor-mance in blocking ratio than MI-PA or MI-BLA algorithms have. However, do notforget that MI-PA and MI-BLA algorithms are other approximations of MIRA,which were created for faster execution, and not for better performance.
In Fig. 5, the average lengths of routes are shown in hops. In most cases theaverage lengths of routes of Minimum Interference Routing Algorithms are alwayshigher than traditional methods. The reason of it comes from the philosophy ofthis algorithm family, because these methods "try" to avoid the usage of some

0
0.01
0.02
0.03
0.04
0.05
400390380370360350340330320310300
Ave
rage
blo
ckin
g ra
tio
Capacity of links
SPWSPSWPMIRA
MI-BLAMI-PA
FMIRA
Fig. 4. Comparison of the blocking ratios
3.6
3.8
4
4.2
4.4
4.6
4.8
5
5.2
5.4
400390380370360350340330320310300
Ave
rage
rou
tele
ngth
(in
hop
s)
Capacity of the edges
SPWSPSWPMIRA
MI-BLAMI-PA
FMIRA
Fig. 5. Comparison of the average lengthsof routes
0.3
0.32
0.34
0.36
0.38
0.4
0.42
0.44
0.46
0.48
0.5
400390380370360350340330320310300
Ave
rage
net
load
Capacity of the edges
SPWSPSWPMIRA
MI-BLAMI-PA
FMIRA
Fig. 6. Comparison of the average loads ofthe network
Fig. 7. The execution time of the algo-rithms
links. This makes the selected routes longer. Considering Fig. 5, our proposedalgorithm behaves similarly to MIRA, it selects long paths warranting that FMIRAavoids the critical links in the network. It approximates the behavior of MIRA well,unlike SMIRA algorithms, which select short paths including critical links, whichis confirmed by higher blocking ratios. FMIRA selects longer paths even if thecapacity of links is high enough, so the avoidance of the critical links will not benecessary.
The average load of the network is shown in Fig. 6, which is given by:
Load =
∑Tj=1
∑mi=1 c
(i,j)used
T ∗ ctotal, (2)
where T is the number of time steps of the simulation. c(i,j)used is the reserved capacity
of links j in time i and ctotal is the total capacity of the network.The average load of the network relates to the lengths of routes. FMIRA and
MIRA use the network quite intensively. These algorithms not only generate thelowest blocking ratio and admit more demands in the network, but they also avoidthe usage of some edges and select more complicated paths, which makes the routelonger.
The behavior of the SWP algorithm requires a short explanation. SWP alwaysselects the shortest one from the set of widest paths, which induces long paths.

This generates extra, unnecessary reservations on links causing high blocking ratioin a heavier loaded network, therefore the average load of the network will be low.
5.3 Complexity
Although the lost performance of our algorithm compared to MIRA is not so sig-nificant, the speed of this approximation is an important question. In section 4 weproved that, the computational complexity of FMIRA is significantly lower thanthat of MIRA, and, at least theoretically, it is in the order of magnitude of Dijkstra’salgorithm’s complexity. In this section, we confirm this finding by the investigationof the running time of algorithms.
To obtain canonical results we used a dedicated computer for this simulation.The capacity of each link was set to a value high enough, so that it did not influ-ence the result (the capacity of an edge was hundred times the traffic generatedby all sessions). The results shown in Fig. 7 are the mean values after executingthe method 200000 times. The running time values were normalized to Dijkstra’sShortest Path algorithm for better comparison.
Fig. 7 shows the relative execution time of the algorithms. The number after thename SMIRA (MI-BLA and MI-PA) and FMIRA is the number of paths computedby these methods (i.e., K). Observe how important this value is. The execution timeof FMIRA is linearly increasing as the function of K, and when computing 5 pathsthe execution time is about two times greater than when computing only one path.Moreover this value is significantly less than that of MIRA. Comparing the resultsit can be seen that our algorithm is faster than both MI-BLA, and MI-PA.
Although in section 4 we declared that FMIRA can theoretically approximatethe shortest path algorithm in running time, Fig. 7 does not reflect this finding.This difference comes from the first step of our algorithm, which generates an extratime, which is proportional to the number of sessions.
5.4 Quality of FMIRA
FMIRA is only an approximation of MIRA, since it does not compute the preciseminimum cut in order to identify the critical links – it solely approximates theminimum cut with the bottleneck links of the first K BFS paths it happens to find.A way to verify the correctness of this "guess" is to observe, how often the criticallinks, as found by FMIRA, make up a cut. In this case, we can regard this cutas a minimum cut, so FMIRA gives a perfect approximation of MIRA. Otherwise,it only finds a proper subset of the "real" critical links. Fig. 8, as the functionof the parameter K, depicts how often the critical links found by a particularalgorithm in the last win rounds, turned out to form a cut (in fact, it depicts theratio, normalized to the number of all routing events). The higher the ratio, themore closely an algorithm approximates MIRA, for which this ratio is 1. As canbe seen on the figure, the higher the number of paths searched by the algorithms,the closer the approximation. For MI-PA and MI-BLA this ratio is higher, becausethey search critical links in a more sophisticated way than FMIRA. However, evenFMIRA is not that bad, and for higher values of K, every second "guess" of thecritical links is correct with FMIRA.

Fig. 8. Ratio of critical links form a cut inthe last win = 2 rounds
Fig. 9. The ratio of a route does not crossany of the links, which is critical for thesession in the last win = 10 rounds
Minimum interference routing is based on the idea that certain critical linksmust be defended from the traffic of other sessions, or future requests will beblocked. An important question with algorithms that approximate the workingsof MIRA, is how often we guess correctly, which links are critical. If we considerlinks to be critical that we never again use for routing actual traffic, then the linkswe defend are not critical in reality. For this to see, we observed, how often aroute crosses at least one link that we found critical for the session in the last winrounds. Again, for MIRA, which we deem to be the ideal case, this value is 1. Fig.9 shows the inverse ratio (that is, the ratio of the occurence that a selected pathdoes not contain critical links) in function of the number of searched paths (K).Interestingly, as K increases, our guess of critical links becomes more and morecorrect. Moreover, as compared to MI-PA and MI-BLA, FMIRA again exhibitsreasonable performance.
These simulations confirm that the seemingly oversimplified critical link identi-fication of FMIRA – the use of BFS for searching for the bottleneck links – gives aquite good approximation of MIRA. In fact, it is almost as good as more sophisti-cated approximation algorithms, while, at the same time, its complexity is clearlysuperior amongst all minimum interference routing algorithms.
6 Conclusion
In this paper, we give an efficient and fast traffic engineering solution for transportnetworks. Our algorithm, FMIRA, is based on the idea of minimum interferencerouting, however it works without complicated flow computations. By minimizingthe interference on the most often used links, a good approach can be achieved withreduced complexity. This is particularly apparent in transport networks, wherethe additional complexity of our algorithm, compared to shortest path routing,disappears, at least theoretically. In simulation studies, we compared our algorithmto traditional, and minimum interference routing algorithms. FMIRA performsalmost like minimum interference routing, and in execution time – although itruns slower than Dijkstra’s algorithm – it runs much faster than other minimuminterference routing algorithms. This difference in running time can be tolerated,
and the better performance of FMIRA makes it really applicable for online routingin modern transport networks.
7 Acknowledgement
The authors thank to Gábor Rétvári and János Tapolcai for their helpful commentson the paper.
References
1. E. W. Dijkstra, ”A Note on Two Problems in Connexion with Graphs”, NumerischeMathematik 1 (1959), pp. 269-271.
2. R. Guerin, A. Orda, and D. Williams, “QoS routing mechanisms and OSPFextensions”, IETF RFC 2676, 1999.
3. Z. Wang and J. Crowcroft, “Quality of Service routing for supporting multimediaapplications,” IEEE Journal on Selected Areas in Communications, vol. 14, pp.1228–1234, 1996.
4. M. S. Kodialam, T. V. Lakshman, “Minimum interference routing with applications toMPLS traffic engineering,” in INFOCOM (2), 2000, pp. 884–893. [Online]. Available:citeseer.ist.psu.edu/kodialam00minimum.html
5. S. Suri, M. Waldvogel, D. Bauer, P. R. Warkhede, “Profile-based routing and trafficengineering,” Computer Communications, vol. 26, pp. 351–365, 2003.
6. I. Iliadis and D. Bauer, “A new class of online minimum-interference routing algo-rithms,” in Networking 2002, Proceedings of Second the International IFIP-TC6 Net-working Conference, May 19-24 2002, p. 959 ff.
7. G. Rétvári, J. Bíró, and T. Cinkler, “A precomputation scheme for minimuminterference routing: the Least-Critical-Path-First algorithm,” to appear at INFOCOM2005.
8. J. Tapolcai, P. Fodor, G. Rétvári, M. Maliosz, T. Cinkler, ”Class-based MinimumInterference Routing for Traffic Engineering in Optical Networks”, in EuroNGI 2005,Proceedings of the first Next Generation Internet Networks Conference, 18-20 April2005. pp:31 - 38
9. D. Kumar, J. Kuri, A. Kumar, ”Routing guaranteed bandwidth virtual pathswith simultaneous maximization of additional flows”, in in Proceedings of IEEE,International Conference on Communications, 2003. pp:1759-1764
10. K. Hendling, G. Franzi, B. Statovci-Halimi, A. Halimi ”Residual network andlink capapcity weighting for efficient traffic engineering in MPLS networks”, in inProceedings of ITC, 2003. pp:51-60
11. G. B. Figueiredo, N. L.S. da Fonseca, J. A.S. Monteiro, ”A minimum interferencerouting algorithm with reduced computational complexity”, in Computer Networks,2005, Article in press
12. B. Quoitin, S. Uhlig, C. Pelsser, L. Swinnen, O. Bonaventure, ”In-terdomain traffic engineering with BGP”, IEEE Communications Magazine,Volume 41, Issue 5, May 2003, pp:122 - 128, [Online]. Available: cite-seer.ist.psu.edu/article/quoitin03interdomain.html
13. R. Inkret, A. Kuchar, B. Mikac, ”Advanced Infrastructure for Photonic Networks- European Research Project COST 266”, Extended Final Report of COST 266Action, 2003, Zagreb, Croatia, ISBN 953-184-064-4, pp. 20 [Online]. Available:http://www.ure.cas.cz/dpt240/cost266/index.html
14. Paul E. Black, ”Dictionary of Algorithms and Data Structures”, Paul E. Black (ed.),NIST. Retrieved on 25 November 2005. [Online]. Available: http://www.nist.gov/dads/
Copyright © 2022 FDOKUMEN



![Fast and Efficient Synthesis of Pyrano[3,2- c ]quinolines Catalyzed by Niobium(V) Chloride](https://static.fdokumen.com/doc/165x107/6337c72f65077fe2dd044087/fast-and-efficient-synthesis-of-pyrano32-c-quinolines-catalyzed-by-niobiumv.jpg)