Fisdas-1-lapressoftcopypegasg2-120921224851-phpapp01
49
ABSTRAK Getaran selaras adalah gerakan bolak-balik yang melewati titik kesetimbangan dalam waktu tertentu. Getaran selaras terjadi pada suatu benda yang digantungkan ke suatu pegas. Getaran memiliki periode (T), yaitu waktu yang diperlukan untuk terjadinya satu getaran lengkap. Karena adanya benda yang digantungkan pada pegas, maka pegas tersebut mengalami pertambahan panjang, disebabkan oleh berat banda yang digantungkan tersebut. Setiap benda memiliki konstanta/tetapan pegas yang berbeda, tergantung pada jenis pegas dan bahan serta banyaknya lilitan pada pegas tersebut. Oleh karena itu setiap pegas akan memberikan respon yang berbeda terhadap perlakuan yang diberikan, misalnya tarikan di ujung pegas yang mengakibatkan simpangan. Berdasarkan data yang telah diperoleh nilai konstanta pegas dengan cara statis yaitu 4,20 N/m dan nilai konstatnta pegas untuk cara dinamis yaitu 2,98 N/m. 1
Transcript of Fisdas-1-lapressoftcopypegasg2-120921224851-phpapp01
ABSTRAK
Getaran selaras adalah gerakan bolak-balik yang
melewati titik kesetimbangan dalam waktu tertentu.
Getaran selaras terjadi pada suatu benda yang
digantungkan ke suatu pegas. Getaran memiliki periode
(T), yaitu waktu yang diperlukan untuk terjadinya satu
getaran lengkap. Karena adanya benda yang digantungkan
pada pegas, maka pegas tersebut mengalami pertambahan
panjang, disebabkan oleh berat banda yang digantungkan
tersebut.
Setiap benda memiliki konstanta/tetapan pegas yang
berbeda, tergantung pada jenis pegas dan bahan serta
banyaknya lilitan pada pegas tersebut. Oleh karena itu
setiap pegas akan memberikan respon yang berbeda
terhadap perlakuan yang diberikan, misalnya tarikan di
ujung pegas yang mengakibatkan simpangan. Berdasarkan
data yang telah diperoleh nilai konstanta pegas dengan
cara statis yaitu 4,20 N/m dan nilai konstatnta pegas
untuk cara dinamis yaitu 2,98 N/m.
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Di dalam kehidupan sehari-hari, pasti banyak
peralatan-peralatan yang memanfaatkan sifat dari pegas.
Tak bisa dihindari penggunaan pegas tersebut sangat
dibutuhkan dalam aktivitas sehari-hari kita. Bukti
konkret penggunaan pegas di kehidupan kita adalah
penggunaan pegas di dalam springbed ataupun kursi sofa.
Ternyata dengan memanfaatkan sifat dari pegas, dapat
diperoleh sebuah keuntungan. Dengan adanya pegas di
dalam springbed ataupun kursi dapat menjadikan keduanya
elastis sehingga lebih nyaman ketika digunakan.
Sebuah pegas yang apabila diberi beban dan
simpangan akan menimbulkan sebuah gerakan, yaitu
gerakan harmonik. Gerak harmonik itu sendiri
dipengaruhi oleh gaya dari sebuah pegas. Dan gaya dari
pegas itu juga dipengaruhi oleh faktor nilai tetapan
pegas itu sendiri. Oleh karena itu akan dilakukan
percobaan tetapan pegas untuk lebih memahaminya.
1.2 Permasalahan
Permasalahan yang akan muncul pada percobaan pegas
ini adalah menghitung tetapan (k) dengan cara statis
maupun dinamis.
2
1.3 Tujuan
Tujuan dari praktikum pegas ini adalah untuk
menentukan nilai tetapan pegas (k).
BAB II
DASAR TEORI
2.1 Osilasi
Setiap gerak yang berulang dalam selang waktu yang
sama disebut gerak periodik. Jika suatu partikel dalam
gerak peiodik bergerak bolak-balik melalui lintasan
yang sama, maka geraknya disebut gerak osilasi atau
vibrasi (getaran). Bumi penuh dengan gerak osilasi,
misalnya osilasi roda keseimbangan arloji, dawai biola,
massa yang diikat pada pegas, atom dalam molekul atau
dalam kisi zat padat, molekul udara ketika ada
gelombang bunyi dan sebagainya.
(D. Halliday, 1999,443)
3
Periode (T) suatu gerakan harmonik berulang di
dalam suatu sistem, yaitu yang bergetar atau berotasi
dengan cara berulang-ulang, adalah waktu yang
dibutuhkan bagi sistem tersebut untuk menyelesaikan
satu putaran penuh. Dalam kasus getaran (osilasi),
periode merupakan waktu total bagi gerakan bolak-balik
sistem. Frekuensi (f) adalah jumlah getaran yang dibuat
persatuan waktu atau banyaknya putaran perdetik. Karena
(T) adalah waktu satu putaran maka dapat dirumuskan :
f = 1T ......... ……………………………..(2.1)
(Frederick J. Bueche, Eugene Heat, 2006, 90)
Satuan internasiaonal untuk frekuensi adalah
putaran per detik, atau hertz (Hz). Posisi pada saat
tidak ada gaya yang bekerja pada partikel yang
berosilasi disebut posisi seimbang. Simpangan
(pergeseran), linier atau sudut, adalah jarak, linier
atau sudut, partikel yang berisolasi dari posisi
seimbangnya pada sembarang saat. Dinyatakan dalam
tenaga, dapat dikatakan bahwa partikel yang mengalami
gerak harmonik bergerak bolak-balik melalui titik yang
tenaga potensialnya minimum (titik sembarang). Bandul
berayun adalah contoh yang baik, tenaga potensialnya
mencapai harga minimum di titik terendah ayunan, yaitu
titik seimbangnya.
Sebuah partikel yang berosilasi, bergerak bolak-
balik di sekitar titik seimbang melalui potensial yang
berubah-ubah menurut konstanta disebut dengan osilator
4
harmonik sederhana. Sebuah benda bermassa m yang
diikatkan pada pegas ideal dengan konstanta gaya (k)
dan bebas bergerak di atas permukaan horizontal tanpa
gesekan merupakan salah satu contoh osilator harmonik
sederhana.
Persoalan osilator harmonik sederhana menjadi
penting karena dua alasan yang berikut : Pertama,
kebanyakan persoalan yang menyangkut getaran mekanis
untuk amplitudo yang kecil kembali menjadi osilator
harmonik sederhana atau kombinasi getaran yang
demikian. Kedua, muncul banyak persoalan fisis seperti
misalnya dalam bidang akustika, optika, mekanika,
rangkaian elektris, dan bahkan dalam fisika atom.(D.
Halliday,1999,443-447)
2.2 Gerakan Harmonik Sederhana
Suatu system yang menunjukkan gejala gerak harmonik
sederhana adalah sebuah benda yang tertambat ke sebuah
pegas. Adapun syarat dari sebuah gerak harmonik
sederhana yaitu bila percepatan sebuah benda berbanding
lurus dan arahnya berlawanan dengan simpangan, benda
itu akan bergerak dengan gerak harmonik sederhana.
Gerak harmonik sederhana merupakan getaran yang
dialami suatu sistem, yaitu sistem hooken. Sistem
hooken adalah sistem yang kembali pada konfigurasi
awalnya setelah berubah bentuk dan kemungkinan
dilepaskan lebih lanjut, ketika sistem semacam ini
5
diregangkan dengan jarak x(untuk penekanan, x adalah
negatif). Di dalam sebuah pegas, terdapat gaya pemulih,
yaitu gaya yang berlawanan dengan perpindahan sistem,
yang merupakan hal yang penting agar getaran terjadi.
Dengan kata lain, gaya pemulih selalu berarah
sedemikian sehingga mendorong atau menarik sistem
kembali pada posisi keseimbangannya.(Frederick J.
Bueche, Eugene Heat, 2006,90-91)
Sebuah gaya pemulih yang ditimbulkan oleh sebuah
pegas ditentukan oleh hokum Hooke. Hukum Hooke adalah
hukum atau ketentuan mengenai gaya dalam ilmu fisika
yang terjadi karena sifat elastisitas dari sebuah
pegas. Sifat elastisitas adalah kemampuan sebuah benda
untuk kembali kebentuk semula.
Hukun Hooke menyatakan bahwa besarnya gaya secara
proporsional akan berbanding lurus dengan pertambahan
panjang yang dapat ditulis :
F = -k. x...................……………………(2.2)
Dalam persamaan tersebut, x adalah panjang setelah
diberi gaya atau pertambahan panjang yang dialami
pegas. F merupakan gaya pemulih dan k adalah suatu
ketetapan atau konstanta pegas. (Sutrisno, 1986, 81)
Misalnya untuk sistem pegas, hukum Hooke juga
berlaku, ketika sebuah gaya menekan atau menarik sebuah
pegas, maka terjadi perubahan pada bentuk pegas, yakni
memendek jika diberikan tekanan atau memanjang jika
ditarik. Namun tidak semua pegas mudah untuk ditarik
6
atau ditekan. Pegas pada sistem suspensi mobil memiliki
kekuatan yang lebih besar dibanding pegas pada umumnya.
Kekuatan ini merupakan modulus elastik yaitu yang
dikenal sebagai konstanta pegas k.
Pada persamaan Hukun Hooke tanda minus menunjukkan
bahwa pegas akan cenderung melawan perubahan. Jika kita
menariknya maka pegas akan menarik kita dengan gaya F
sebesar k dikali panjang tarikan kita x, dan jika
pegas kita tekan, ia melawan dengan menekan kita.
(Muhammad Ishaq, 2007, 89)
Hukum Hooke berlaku pada suatu bahan selama
perubahan panjang tidak terlalu besar. Daerah dimana
hokum Hooke berlaku disebut daerah elastis.
Jika suatu bahan mengalami perubahan panjang
melampaui daerah elastis, maka akan mengalami perubahan
bentuk permanen. Daerah diluar daerah elastis disebut
daerah plastik. Dalam daerah disebut bersifat permanen.
Jika sebuah pegas ditarik melebihi batas elastik, maka
pegas tidak kembali lagi pada panjang semula karena
struktur atom dalam pegas telah mengalami perubaha.
(Sutrisno, 1986, 82)
2.3 Konstanta Pegas
Pegas yang ujung mula-mula berada pada titik xO
bila diberi beban dengan massa m, maka pegas tersebut
akan bertambahnya panjang sebesar x, sehingga :
x = x2 – x1 ….......………………………..(2.3)
7
Berdasarkan hokum Hooke peristiwa dirumuskan dengan
F = -
kx.....................................................
..(2.4)
Bila setelah diberi massa m pegas kita getarkan
yaitu dengan cara menarik pada beban jarak tertentu
lalu dilepaskan, maka waktu pergetaran selaras pegas
atau periode dirumuskan :
T = 2πW…………………………..……..(2.5)
dengan W = √Km maka T = 2R √mK ………….......…………
(2.6)
Tenaga kinetik benda telah diartikan sebagai
kemampuan untuk melakukan usaha karena adanya gerak.
Gaya elastis yang dilakukan oleh pegas ideal dan gaya
lain yang berlaku serupa disebut bersifat konservatif.
Pegas spiral dibedakan menjadi 2 macam, yaitu :
1. Pegas spiral yang dapat meregang memanjang
karena gaya tarik misalnya pegas spiral pada
neraca pegas.
2. Pegas spiral yang dapat meregang memendek
karena gaya dorong misalnya pada jok tempat
duduk jok mobil.
Timbulnya gaya meregang pada pegas spiral sebagai
reaksi adanya pengaruh gaya tarik atau gaya dorong
8
sebagai aksi suatu gaya diletakkan bekerja jika gaya
itu dapat menyebabkan perubahan pada benda. Misalnya
gaya berat dari suatu benda yang digantungkan. Pada
ujung bagian bawah spiral menyebabkan pegas spiral
berubah meregang memanjang dan sekaligus timbul gaya
regang yang besarnya sama dengan berat benda digantung.
(addesanjaya.blogspot.com/2010/10/konstanta
pegas.html).
2.4 Formulasi Matematika
Persamaan gerak getaran dapat diturunkan dari dua
hukum gerak, yaitu hokum II Newton dan hokum Hooke.
Bila pegas tidak tertarik atau tertekan, simpangan
benda adalah nol, benda dalam titik keseimbangan. Bila
benda ditarik, simpangan benda positif. Bila pegas
adalah satu-satunya gaya luar yang bekerja pada benda
namun berlawanan arah dengannya.
F = m.a
-kx = m.a
- kxm = a
a + km . x = 0
d2xdt2 +
km x = 0
……………………………….…... (2.7)
Persamaan 2.7 merupakan persamaan getaran selaras.
Dalam getaran selaras, benda berosilasi diantara dua
9
posisi dalam waktu (periode) tertentu dengan asumsi
tanpa kehilangan tenaga mekaniknya. Dengan kata lain,
simpangan maksimum(amplitudo) getaran tetap.
Tanpa menunjukkan langkah-langkah perhitungannya,
persamaan 2.7 dapat berbentuk :
x(t) : A Sin (wt ± θ ) ……………………(2.8)dengan A, w, dan θ adalah tetapan. A disebut
amplitudo, w adalah frekuensi sudut, dalam persamaan di
atas, bernilai √km dan θ adalah sudut fase awal.
Besaran(wt + θ) disebut fase getaran. Sudut fase awal (θ) adalah faktor dalam persamaan yang dilibatkan untukmenggambarkan posisi benda yang berosilasi.(D.
Halliday. 1999. 449)
2.5 Osilasi Dua-Benda
Dalam alam seringkali kita menjumpai sistem
berosilasi dua-benda dengan massa salah satu benda
tidak dapat diambil sama dengan tak terhingga dan kita
harus meninjau gerak kedua benda itu dalam suatu
kerangka inersial yang sesuai. Contoh-contoh untuk
sistem ini, antara lain, molekul diatomik seperti H2,
CO, HCL dan sebagainya, yang dapat berosilasi sepanjang
sumbu simetrinya. Gandengan(Coupling) antara kedua atom
yang membentuk molekul bersifat elektromagnetik, tetapi
untuk keperluan kita sekarang, kita dapat membayangkan
10
bahwa kedua atom tersebut seolah-olah dihubungkan oleh
pegas tak bermassa yang sangat kecil.
Suatu hal yang tak terduga dalam osilator dua benda
ini adalah bahwa dengan sedikit mendefinisikan kembali
suku-sukunya dan dengan memperkenalkan suatu konsep
baru. (D. Holliday, 1999, 474)
2.6 Hukum II Newton
Hukum pertama Newton menerangkan bagaimana suatu
objek ketika tidak ada suatu gaya yang bekerja padanya.
Ini juga pada saat diam ataupun bergerak dalam garis
lurus dengan kecepatan konstan. Hukum kedua Newton
menjawab bagaimana jika ada suatu gaya yang bekerja
pada suatu benda.
Percepatan benda juga bergantung pada massa, kita
dapat memahaminya dengan percobaan sebagai berikut.
Jika kita memberi suatu gaya pada suatu benda. Benda
tersebut akan mempunyai percepatan sebesar “a”.
Jika kita memberi sebuah gaya 2 kali lipat dari
gaya semula, percepatan akan bertambah 2 kali lipatnya.
Dan jika kita memberikan gaya sebesar 3 kali lipat dari
gaya awal, percepatan akan bertambah 3 kali lipat, dan
begitu seterusnya. Dari hal tersebut, dapat disimpulkan
percepatan suatu benda berbalik dengan massanya.
Jadi dapat dihubungkan massa, percepatan dan gaya
secara matematis, hokum II Newton.
F = m . a …………………∑ ....……………(2.9)
11
(Id.wikipedia.org/wiki/hokum newton)
BAB III
METOLOGI PERCOBAAN
3.1 Peralatan dan Bahan
Peralatan dan bahan yang digunakan dalam praktikum
ini meliputi : ember 1 buah, beban pemberat 1 set,
stopwatch 1 buah, statip 1 set, timbangan 0-610 gram,
pegas 1set(besar dan kecil).
3.2 Cara Kerja
12
Dalam praktikum ini terdapat 2 cara dalam
menentukan tetapan pegas, yaitu cara statis dan cara
dinamis.
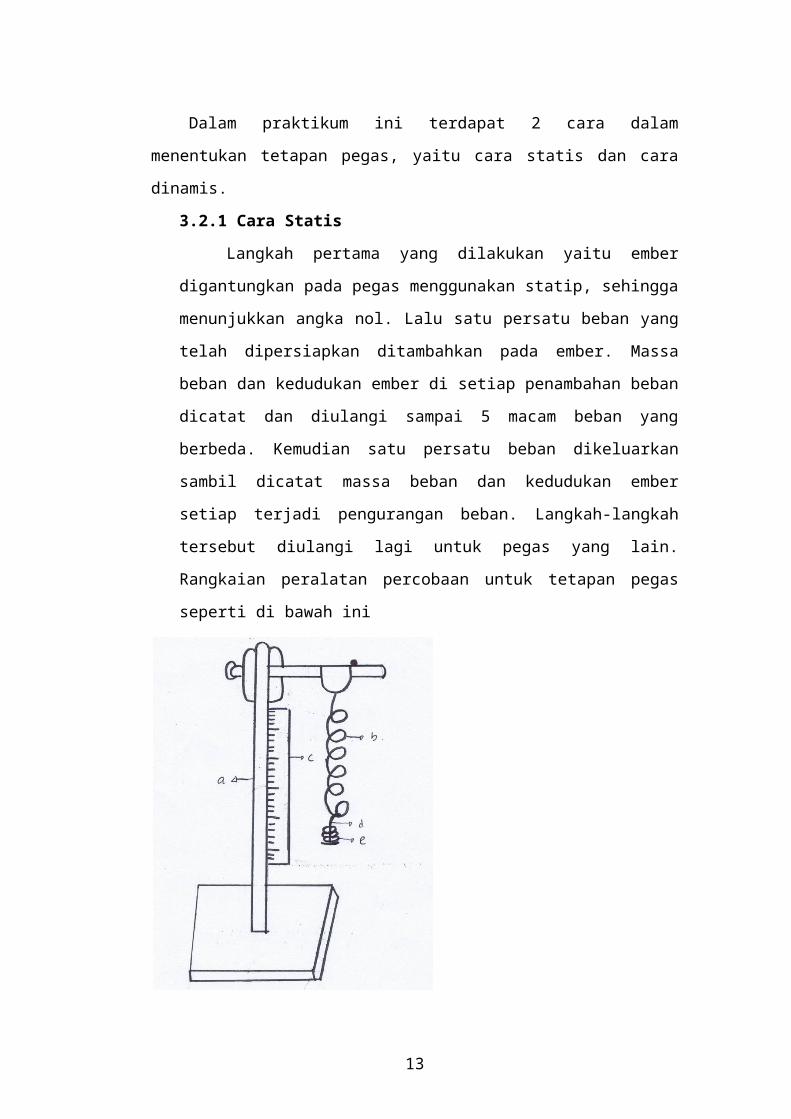
3.2.1 Cara Statis
Langkah pertama yang dilakukan yaitu ember
digantungkan pada pegas menggunakan statip, sehingga
menunjukkan angka nol. Lalu satu persatu beban yang
telah dipersiapkan ditambahkan pada ember. Massa
beban dan kedudukan ember di setiap penambahan beban
dicatat dan diulangi sampai 5 macam beban yang
berbeda. Kemudian satu persatu beban dikeluarkan
sambil dicatat massa beban dan kedudukan ember
setiap terjadi pengurangan beban. Langkah-langkah
tersebut diulangi lagi untuk pegas yang lain.
Rangkaian peralatan percobaan untuk tetapan pegas
seperti di bawah ini
13
Gambar 3.2
3.2.2 Cara Dinamis
Langkah pertama yang dilakukan yaitu ember
digantungkan pada pegas besar lalu diberi beban
pemberat dan simpangan menuju pusat bumi sejauh
10cm, setelah itu dilepaskan dan waktu untuk 15
getaran dicatat. Kemudian ditambahkan beban hingga
lima kali penambahan, waktu untuk 15 kali getaran
juga dicatat setiap penambahan beban pemberat.
Semua langkah tersebut dilakukan juga untuk pegas
kecil.
Keterangan gambar rancangan percobaan :
a. Statipb. Mistar
(penggaris)c. Pegasd. Ember
14
BAB IV
ANALISIS DATA DAN PEMBAHASAN
4.1 Analisis data
4.1.1 Cara statis
Pegas 1(pegas kecil), xo=12 cm
15
No.
m1 (gram)
(penambahan
)
X1 (cm)
m1 (gram)
(penguranga
n)
X2 (cm)
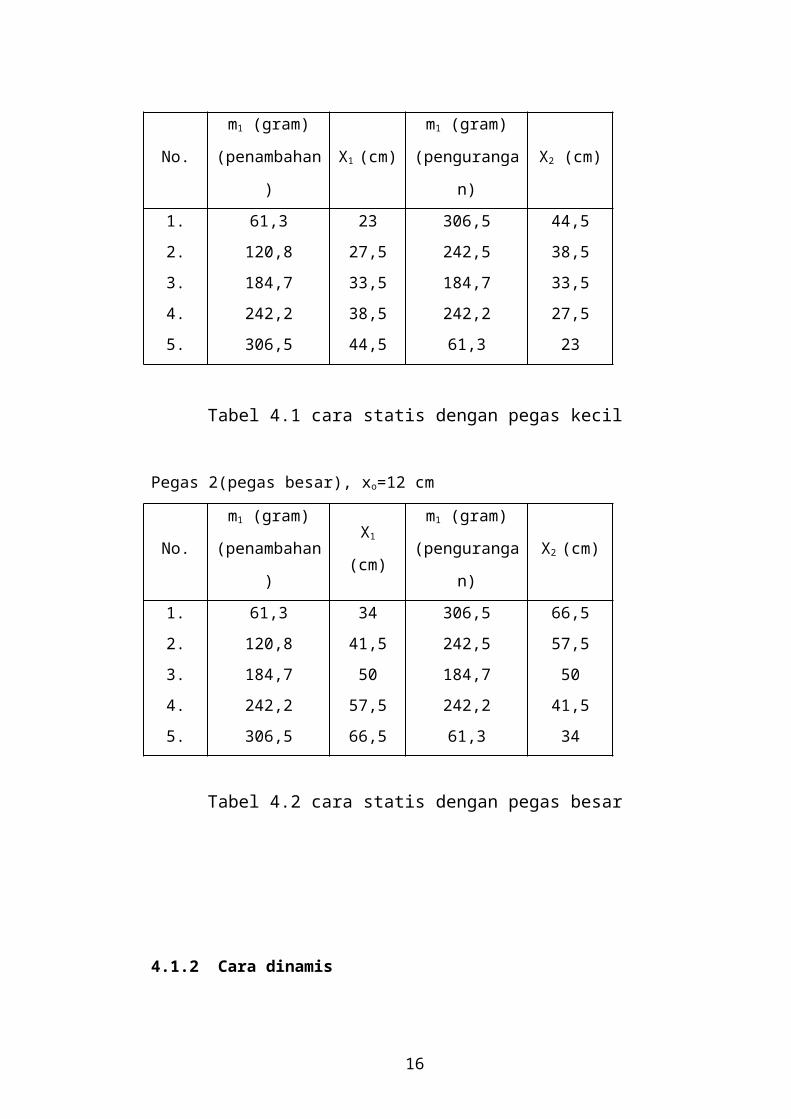
1. 61,3 23 306,5 44,52. 120,8 27,5 242,5 38,53. 184,7 33,5 184,7 33,54. 242,2 38,5 242,2 27,55. 306,5 44,5 61,3 23
Tabel 4.1 cara statis dengan pegas kecil
Pegas 2(pegas besar), xo=12 cm
No.
m1 (gram)
(penambahan
)
X1
(cm)
m1 (gram)
(penguranga
n)
X2 (cm)
1. 61,3 34 306,5 66,52. 120,8 41,5 242,5 57,53. 184,7 50 184,7 504. 242,2 57,5 242,2 41,55. 306,5 66,5 61,3 34
Tabel 4.2 cara statis dengan pegas besar
4.1.2 Cara dinamis
16
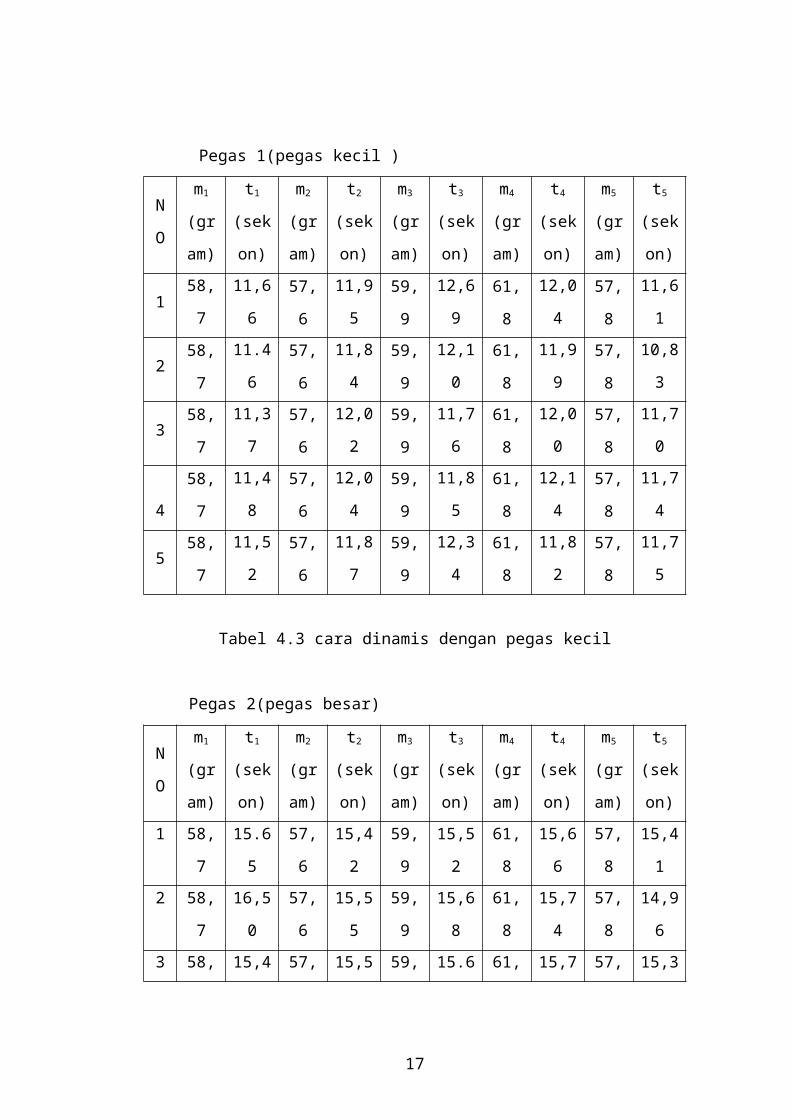
Pegas 1(pegas kecil )
N
O
m1
(gr
am)
t1
(sek
on)
m2
(gr
am)
t2
(sek
on)
m3
(gr
am)
t3
(sek
on)
m4
(gr
am)
t4
(sek
on)
m5
(gr
am)
t5
(sek
on)
158,
7
11,6
657,
6
11,9
559,
9
12,6
961,
8
12,0
457,
8
11,6
1
258,
7
11.4
657,
6
11,8
459,
9
12,1
061,
8
11,9
957,
8
10,8
3
358,
7
11,3
757,
6
12,0
259,
9
11,7
661,
8
12,0
057,
8
11,7
0
458,
7
11,4
857,
6
12,0
459,
9
11,8
561,
8
12,1
457,
8
11,7
4
558,
7
11,5
257,
6
11,8
759,
9
12,3
461,
8
11,8
257,
8
11,7
5
Tabel 4.3 cara dinamis dengan pegas kecil
Pegas 2(pegas besar)
N
O
m1
(gr
am)
t1
(sek
on)
m2
(gr
am)
t2
(sek
on)
m3
(gr
am)
t3
(sek
on)
m4
(gr
am)
t4
(sek
on)
m5
(gr
am)
t5
(sek
on)1 58,
7
15.6
5
57,
6
15,4
2
59,
9
15,5
2
61,
8
15,6
6
57,
8
15,4
12 58,
7
16,5
0
57,
6
15,5
5
59,
9
15,6
8
61,
8
15,7
4
57,
8
14,9
63 58, 15,4 57, 15,5 59, 15.6 61, 15,7 57, 15,3
17
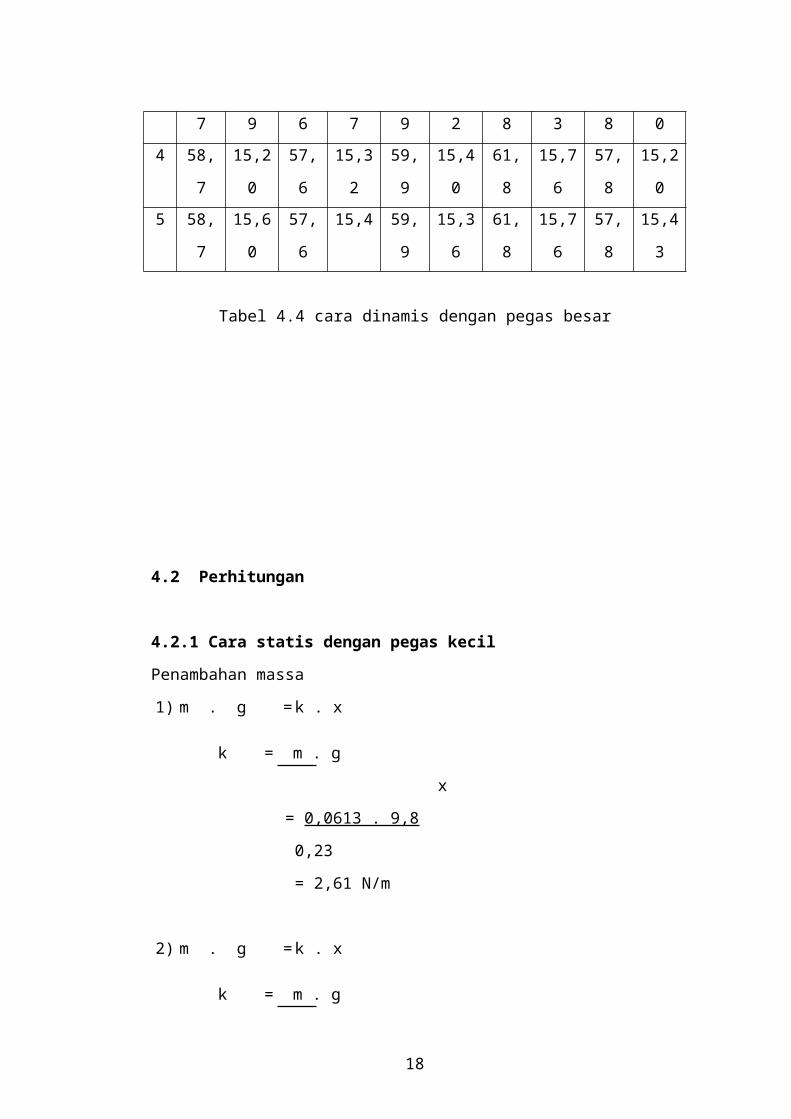
7 9 6 7 9 2 8 3 8 04 58,
7
15,2
0
57,
6
15,3
2
59,
9
15,4
0
61,
8
15,7
6
57,
8
15,2
05 58,
7
15,6
0
57,
6
15,4 59,
9
15,3
6
61,
8
15,7
6
57,
8
15,4
3
Tabel 4.4 cara dinamis dengan pegas besar
4.2 Perhitungan
4.2.1 Cara statis dengan pegas kecil
Penambahan massa
1) m . g =k . x
k = m . g
x
= 0,0613 . 9,8
0,23
= 2,61 N/m
2) m . g =k . x
k = m . g
18
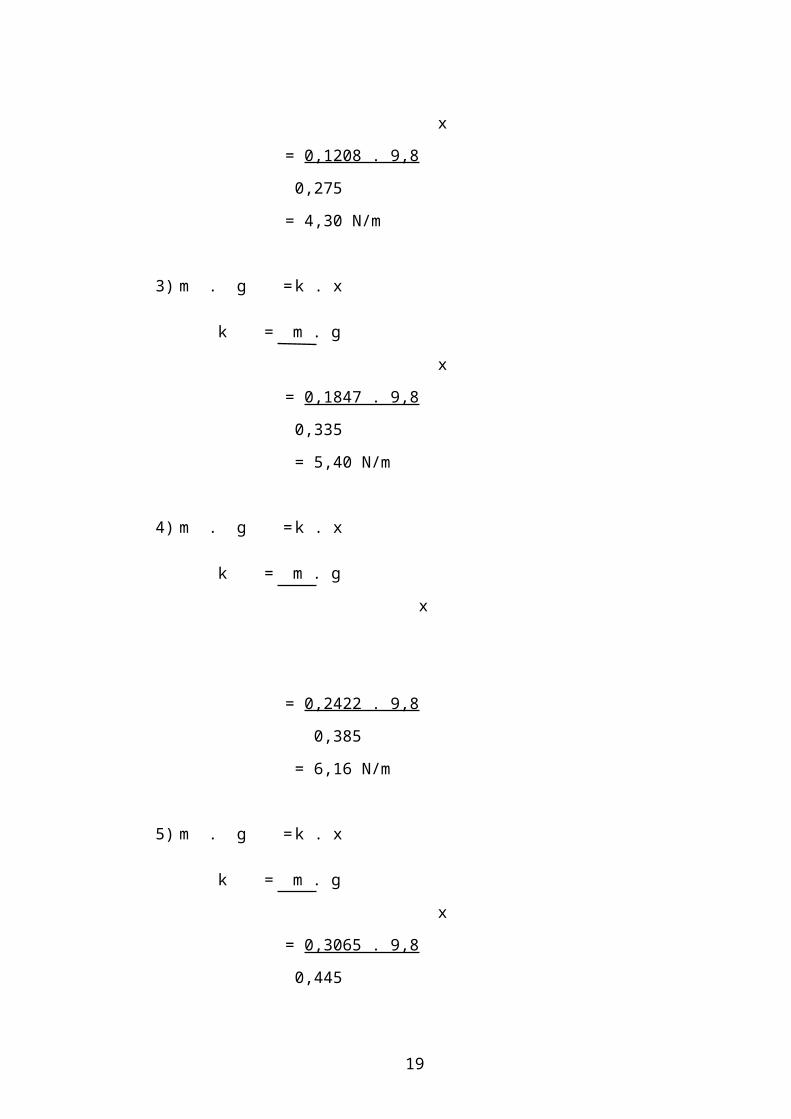
x
= 0,1208 . 9,8
0,275
= 4,30 N/m
3) m . g =k . x
k = m . g
x
= 0,1847 . 9,8
0,335
= 5,40 N/m
4) m . g =k . x
k = m . g
x
= 0,2422 . 9,8
0,385
= 6,16 N/m
5) m . g =k . x
k = m . g
x
= 0,3065 . 9,8
0,445
19
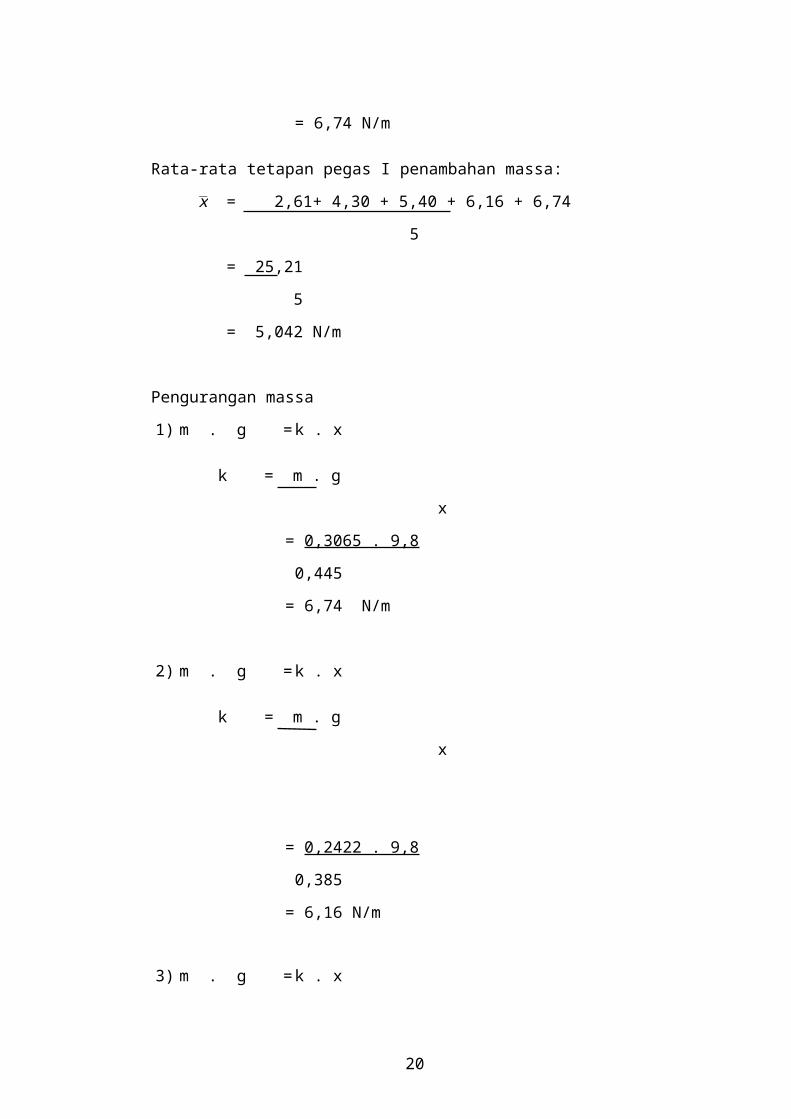
= 6,74 N/m
Rata-rata tetapan pegas I penambahan massa:
x = 2,61+ 4,30 + 5,40 + 6,16 + 6,74
5
= 25,21
5
= 5,042 N/m
Pengurangan massa
1) m . g =k . x
k = m . g
x
= 0,3065 . 9,8
0,445
= 6,74 N/m
2) m . g =k . x
k = m . g
x
= 0,2422 . 9,8
0,385
= 6,16 N/m
3) m . g =k . x
20
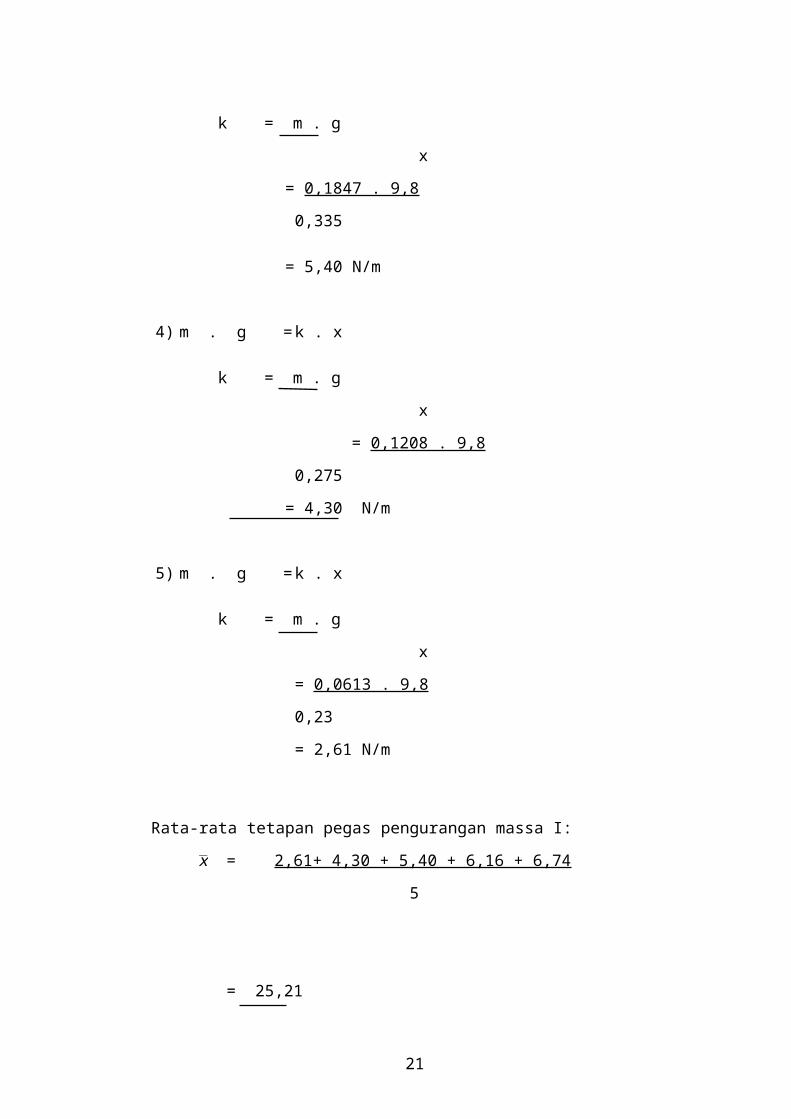
k = m . g
x
= 0,1847 . 9,8
0,335
= 5,40 N/m
4) m . g =k . x
k = m . g
x
= 0,1208 . 9,8
0,275
= 4,30 N/m
5) m . g =k . x
k = m . g
x
= 0,0613 . 9,8
0,23
= 2,61 N/m
Rata-rata tetapan pegas pengurangan massa I:
x = 2,61+ 4,30 + 5,40 + 6,16 + 6,74
5
= 25,21
21
5
= 5,042 N/m
Tetapan pegas I:
x = 5,042+5,042
2
= 5,042 N/m
4.2.2 Cara statis dengan pegas besar
Penambahan massa
1) m . g =k . x
k = m . g
x
= 0,0613 . 9,8
0,34
= 1,76 N/m
2) m . g =k . x
k = m . g
x
= 0,1208 . 9,8
0,415
= 2,85 N/m
3) m . g =k . x
k = m . g
22
x
= 0,1847 . 9,8
0,50
= 3,62 N/m
4) m . g =k . x
k = m . g
x
= 0,2422 . 9,8
0,575
= 4,12 N/m
5) m . g =k . x
k = m . g
x
= 0,3065 . 9,8
0,665
= 4,51 N/m
Rata-rata tetapan pegas 2 penambahan massa: x = 1,76 + 2,85 +3,62 + 4,12 + 4,51
5
= 16,86
23
5
= 3,372 N/m
Pengurangan massa
1) m . g =k . x
k = m . g
x
= 0,3065 . 9,8
0,665
= 4,51 N/m
2) m . g =k . x
k = m . g
x
= 0,2422 . 9,8
0,575
= 4,12 N/m
3) m . g =k . x
k = m . g
x
= 0,1847 . 9,8
0,50
= 3,62 N/m
24
4) m . g = k . x
k = m . g
x
= 0,1208 . 9,8
0,415
= 2,85 N/m
5) m . g = k . x
k = m . g
x
= 0,0613 . 9,8
0,34
= 1,76 N/m
Rata-rata tetapan pegas pengurangan massa I:
x = 2,61+ 4,30 + 5,40 + 6,16 + 6,74
5
= 16,86
5
= 3,372 N/m
Tetapan pegas 2 :
x = 3,372 + 3,372
2
25
= 3,372 N/m
Jadi rata-rata tetapan pegas statis adalah :
x = 5,042 + 3,372
2
= 4,20 N/m
4.2.2 Cara dinamis dengan pegas kecil
Pegas 1(pegas kecil)
1. Pegas dengan beban 0,0587 kg
T = √2(m /k)
K = 4 2 m
T2
= 42. 0,0587
( 11,50/15 )2
= 3,85 N/m
2. Pegas dengan beban 0,0576 kg
T = √2(m /k)
K = 4 2 m
T2
= 42. 0,0576
( 11,95/15 )2
= 3,67 N/m
3. Pegas dengan beban 0,0599 kg
26
T = √2(m /k)
K = 4 2 m
T2
= 42. 0,0599
( 12,14/15 )2
= 3,68 N/m
4. Pegas ditambah beban 0,0618 kg
T = √2(m /k)
K = 4 2 m
T2
= 42. 0,0618
( 12/15 )2
= 3,79 N/m
5. Pegas dengan beban 0,0578 kg
T = √2(m /k)
K = 4 2 m
T2
= 42. 0,0578
( 11,52/15 )2
= 3,91 N/m
Rata-rata tetapan pegas kecil cara dinamis
K = 3,85 + 3,67 + 3,68 + 3,79 + 3,91
27

5
= 18,9
5= 3,78 N/m
4.2.3 Cara dinamis dengan pegas besar
Pegas 2(pegas besar)
1. Pegas dengan beban 0,0587 kg
T = √2(m /k)
K = 4 2 m
T2
= 42. 0,0587
( 15,68/15 )2
= 2,13 N/m
2. Pegas dengan beban 0,0576 kg
T = √2(m /k)
K = 4 2 m
T2
= 42. 0,0576
( 15,45/15 )2
= 2,14 N/m
3. Pegas dengan beban 0,0599 kg
T = √2(m /k)
K = 4 2 m
28
T2
= 42. 0,0599
( 15,51/15 )2
= 2,22 N/m
4. Pegas ditambah beban 0,0618 kg
T = √2(m /k)
K = 4 2 m
T2
= 42. 0,0618
( 15,73/15 )2
= 2,25 N/m
5. Pegas dengan beban 0,0578 kg
T = √2(m /k)
K = 4 2 m
T2
= 42. 0,0578
( 15,26/15 )2
= 2,23 N/m
Rata-rata tetapan pegas besar cara dinamis
K = 2,13 + 2,14 +2,22 + 2,25 +2,23
5
= 10,97
5
29
= 2,19 N/m
Jadi rata-rata tetapan pegas cara dinamis adalah :
K = 3,78 + 2,19
2
= 2,98 N/m
4.3 Grafik
Gambar grafik linear tetapan pegas I, dengan w(berat)
sebagai ordinat dan x (pertambahan panjang) sebagai
absis
Grafik 1.1 grafik tetapan pegas 1
Gambar grafik linear tetapan pegas II, dengan w(berat)
sebagai ordinat dan x( pertambahan panjang)sebagai
absis
30
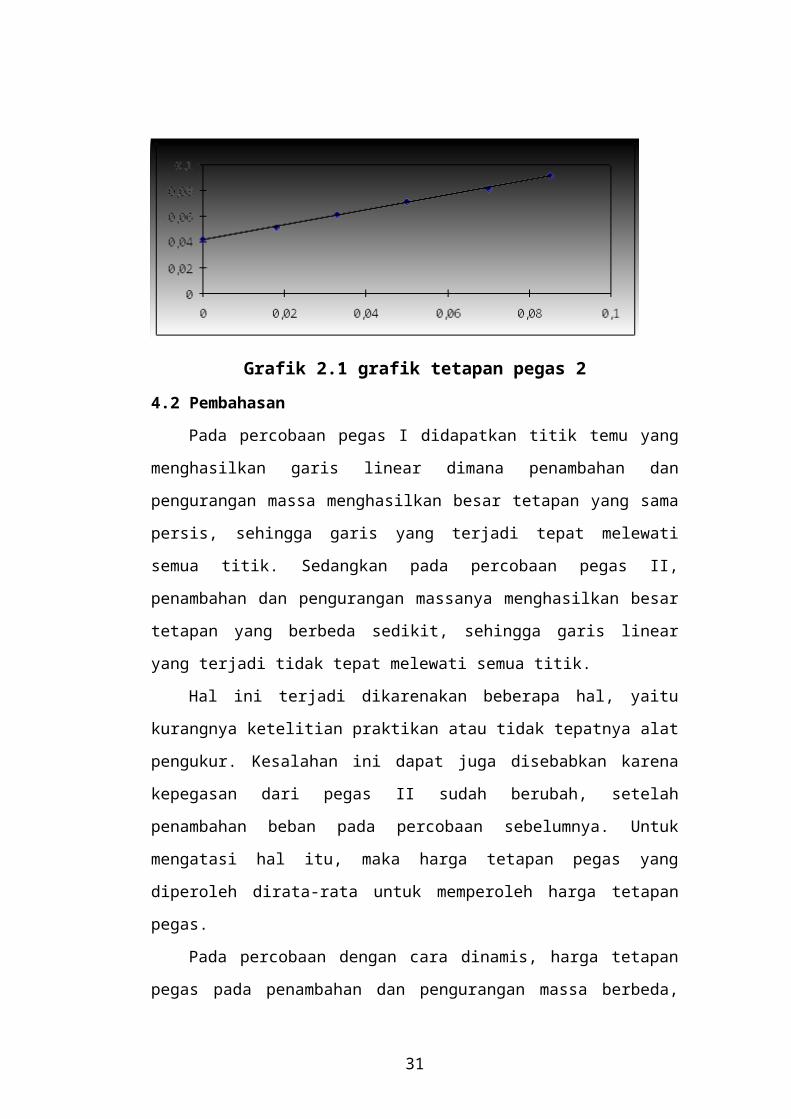
Grafik 2.1 grafik tetapan pegas 24.2 Pembahasan
Pada percobaan pegas I didapatkan titik temu yang
menghasilkan garis linear dimana penambahan dan
pengurangan massa menghasilkan besar tetapan yang sama
persis, sehingga garis yang terjadi tepat melewati
semua titik. Sedangkan pada percobaan pegas II,
penambahan dan pengurangan massanya menghasilkan besar
tetapan yang berbeda sedikit, sehingga garis linear
yang terjadi tidak tepat melewati semua titik.
Hal ini terjadi dikarenakan beberapa hal, yaitu
kurangnya ketelitian praktikan atau tidak tepatnya alat
pengukur. Kesalahan ini dapat juga disebabkan karena
kepegasan dari pegas II sudah berubah, setelah
penambahan beban pada percobaan sebelumnya. Untuk
mengatasi hal itu, maka harga tetapan pegas yang
diperoleh dirata-rata untuk memperoleh harga tetapan
pegas.
Pada percobaan dengan cara dinamis, harga tetapan
pegas pada penambahan dan pengurangan massa berbeda,
31
baik pada pegas I maupun pada pegas II. Ini disebabkan
kemungkinan karena kesalahan pencatatan waktu yang
kurang tepat, atau kepegasan dari kedua pegas sudah
berubah setelah percobaan sebelumnya. Oleh karena itu
untuk memperoleh harga tetapan pegasnya, harga tetapan
dari masing-masing percobaan dirata-rata.
Jika dilihat pada analisa data yang ada, hasil
tetapan pegas yang didapat tidak jauh berbeda. Adapun
masalah-masalah yang dapat menyebabkan perbedaan hasil
akhir antara lain:
1. Pembulatan dalam perhitungan
Seperti yang kita tahu tetapan pegas yang didapat
dari percobaan ini menghasilkan suatu nilai yang
bernilai desimal. Dari situlah, sehingga dijadikan
pembulatan dimana pembulatan tersebut akan menimbulkan
ketidakakuratan dari nilai tetapan pegas
2. Kesalahan alat karena alat tidak bekerja sempurna
Alat yang dipakai saat praktikum tetapan pegas ini
kemungkinan tidak bekerja sempurna sehingga data-data
yang didapat kurang akurat
3.Kesalahn praktikan,kurang cermat dalam mengambil
data,kurang hati-hati dalam percobaan sehingga
mempengaruhi dalam perolehan data
Untuk cara statis,dalam menganalisa data dalam
percobaan kami menggunakan regresi linier dan
menggunakan alat. Sedangkan untuk cara dinamis,sebagai
massa awal adalah massa ember dan digetarkan sebanyak
32
15 kali. Sehingga periode di dapat dari pembagian antar
waktu yang diperlukan untuk 15 kali getaran dan
banyaknya getaran yaitu 15 kali
33
BAB V
KESIMPULAN
Dari percobaan tetapan pegas yang telah di lakukan
didapatkan kesimpulan bahwa
1. Tiap-tiap pegas memiliki tetapan pegas yang
berbeda-beda,hal ini dibuktikan dengan hasil
pengukuran cara statis dan cara dinamis yang
berbeda. Berdasarkan hasil pengukuran bahwa nilai
tetapan pegas cara statis adalah 4,20 N/m,
sedangkan nilai tetapan pegas cara dinamis adalah
2,98 N/m.
2. Dari percobaan tersebut dapat juga disimpulkan
bahwa penambahan beban sebanding dengan
pertambahan panjang.
34

35
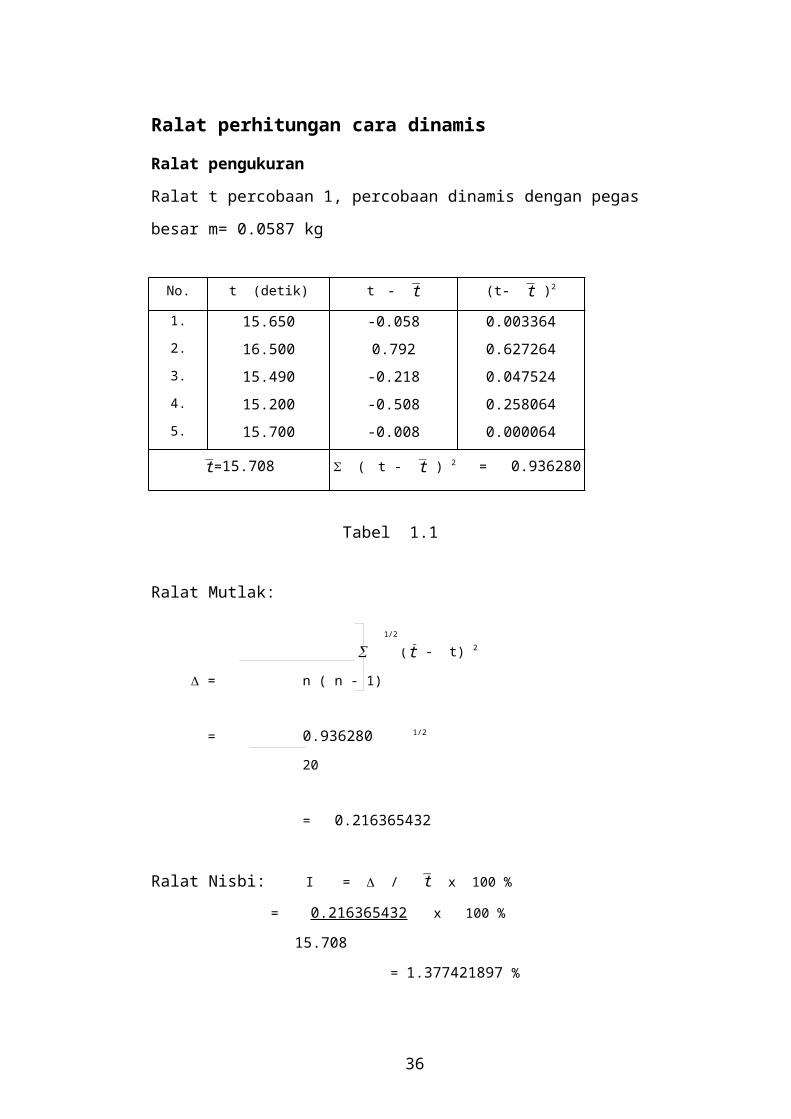
Ralat perhitungan cara dinamis
Ralat pengukuran
Ralat t percobaan 1, percobaan dinamis dengan pegas
besar m= 0.0587 kg
No. t (detik) t - t (t- t )2
1. 15.650 -0.058 0.0033642. 16.500 0.792 0.6272643. 15.490 -0.218 0.0475244. 15.200 -0.508 0.2580645. 15.700 -0.008 0.000064
t=15.708 ( t - t ) 2 = 0.936280
Tabel 1.1
Ralat Mutlak:
(t - t) 2
= n ( n - 1)
= 0.936280 1/2
20
= 0.216365432
Ralat Nisbi: I = / t x 100 % = 0.216365432 x 100 %
15.708
= 1.377421897 %
1/2
36
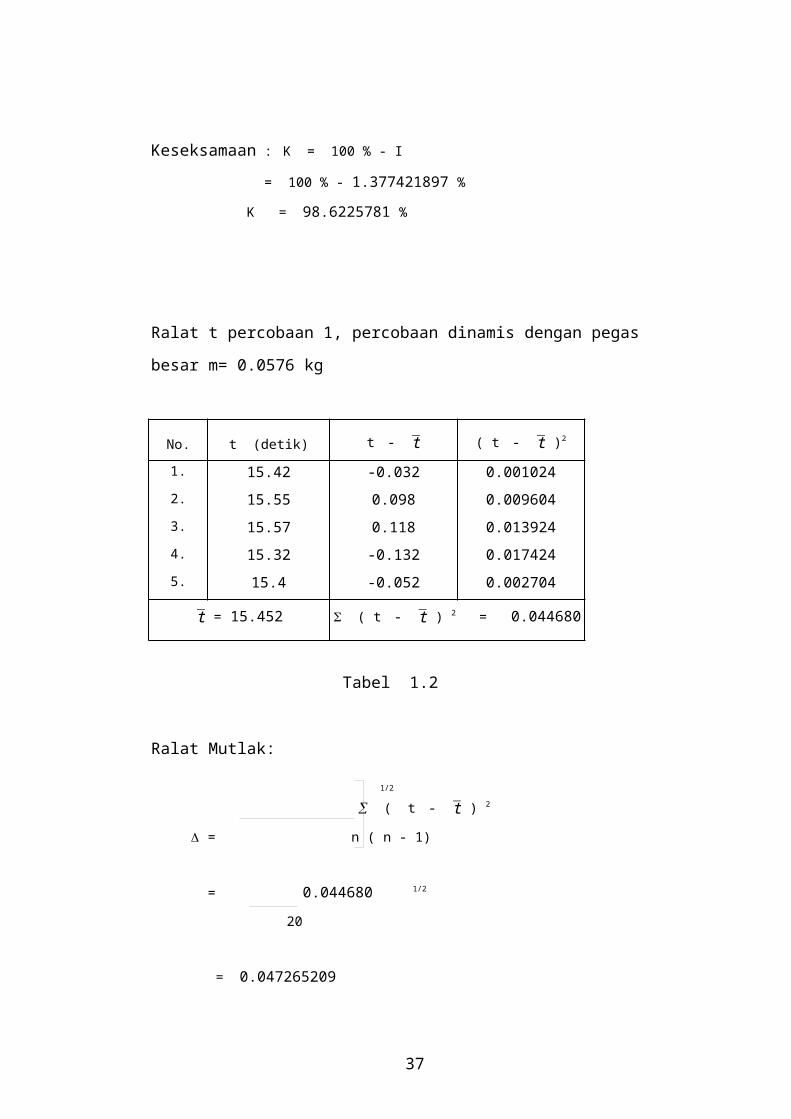
Keseksamaan : K = 100 % - I
= 100 % - 1.377421897 %
K = 98.6225781 %
Ralat t percobaan 1, percobaan dinamis dengan pegas
besar m= 0.0576 kg
No. t (detik) t - t ( t - t )2
1. 15.42 -0.032 0.0010242. 15.55 0.098 0.0096043. 15.57 0.118 0.0139244. 15.32 -0.132 0.0174245. 15.4 -0.052 0.002704
t = 15.452 ( t - t ) 2 = 0.044680
Tabel 1.2
Ralat Mutlak:
( t - t ) 2
= n ( n - 1)
= 0.044680 1/2
20
= 0.047265209
1/2
37
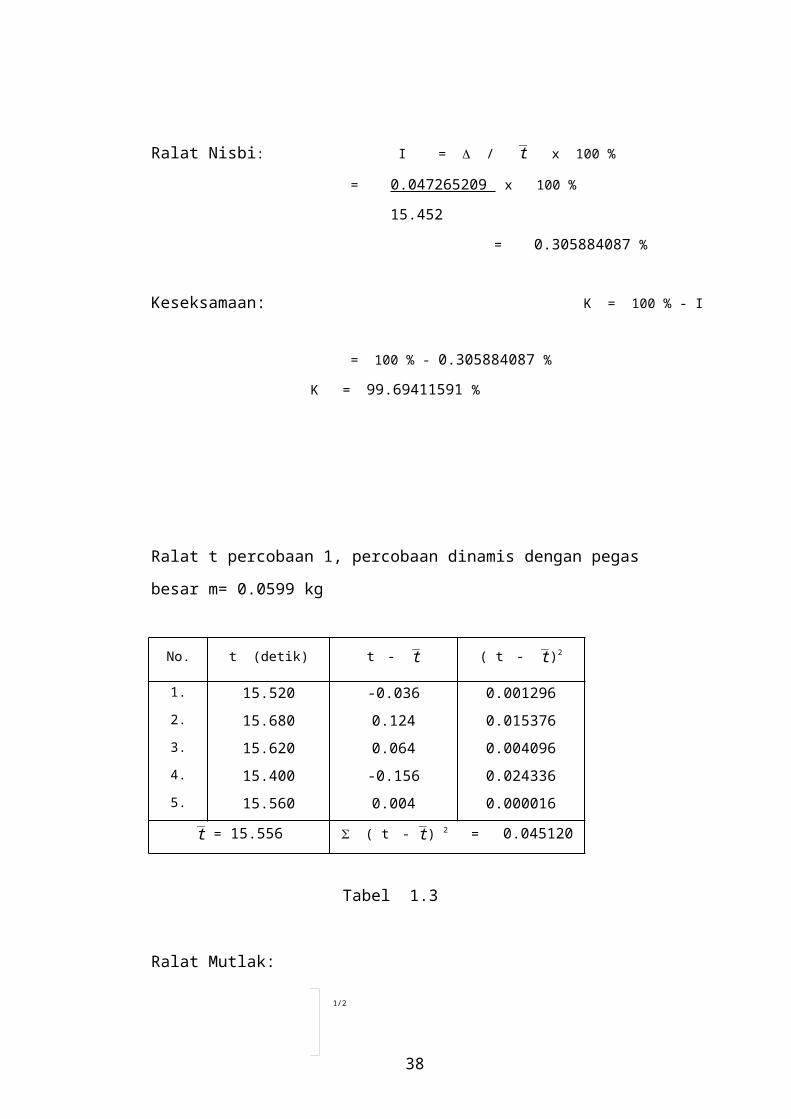
Ralat Nisbi: I = / t x 100 % = 0.047265209 x 100 %
15.452
= 0.305884087 %
Keseksamaan: K = 100 % - I
= 100 % - 0.305884087 %
K = 99.69411591 %
Ralat t percobaan 1, percobaan dinamis dengan pegas
besar m= 0.0599 kg
No. t (detik) t - t ( t - t)2
1. 15.520 -0.036 0.0012962. 15.680 0.124 0.0153763. 15.620 0.064 0.0040964. 15.400 -0.156 0.0243365. 15.560 0.004 0.000016
t = 15.556 ( t - t) 2 = 0.045120
Tabel 1.3
Ralat Mutlak:
1/2
38
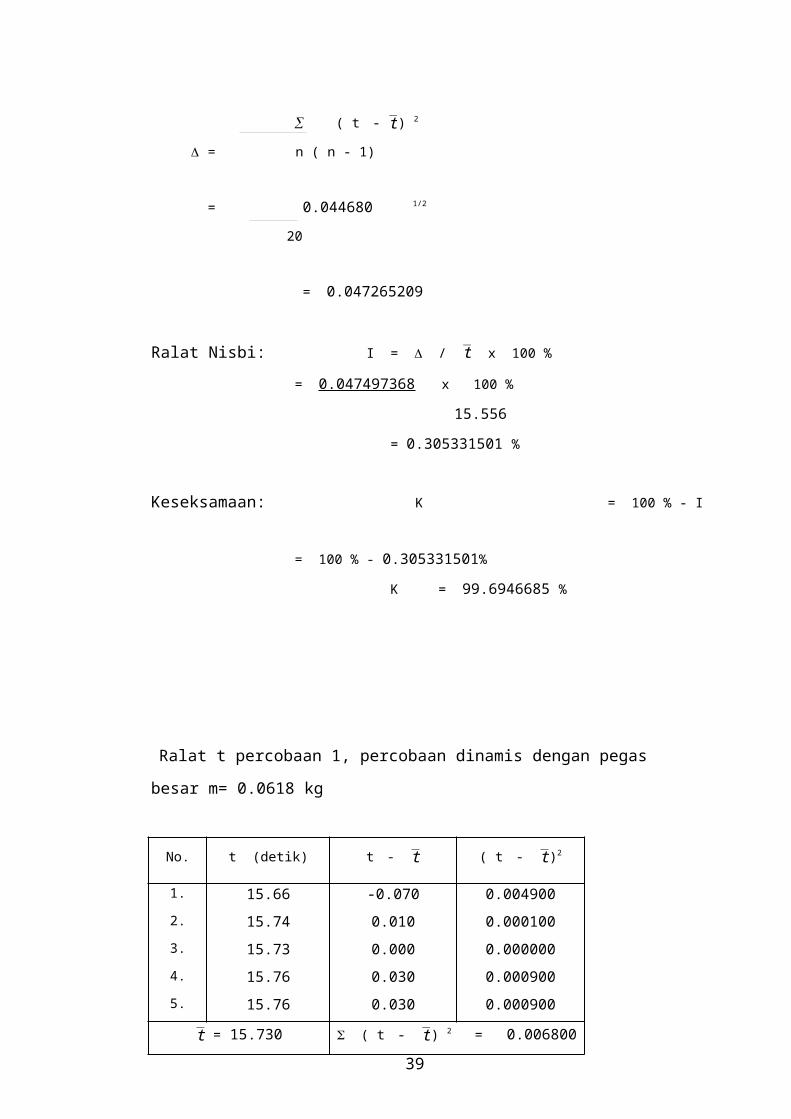
( t - t) 2
= n ( n - 1)
= 0.044680 1/2
20
= 0.047265209
Ralat Nisbi: I = / t x 100 % = 0.047497368 x 100 %
15.556
= 0.305331501 %
Keseksamaan: K = 100 % - I
= 100 % - 0.305331501%
K = 99.6946685 %
Ralat t percobaan 1, percobaan dinamis dengan pegas
besar m= 0.0618 kg
39
No. t (detik) t - t ( t - t)2
1. 15.66 -0.070 0.0049002. 15.74 0.010 0.0001003. 15.73 0.000 0.0000004. 15.76 0.030 0.0009005. 15.76 0.030 0.000900
t = 15.730 ( t - t) 2 = 0.006800
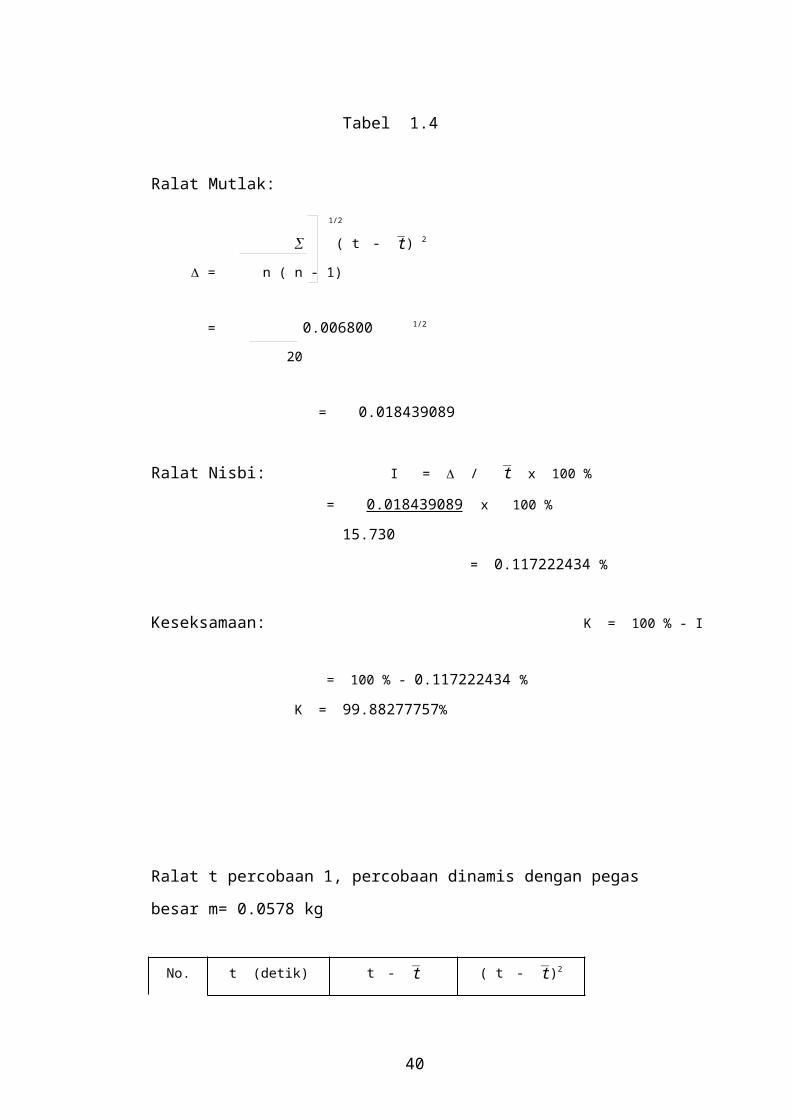
Tabel 1.4
Ralat Mutlak:
( t - t) 2
= n ( n - 1)
= 0.006800 1/2
20
= 0.018439089
Ralat Nisbi: I = / t x 100 % = 0.018439089 x 100 %
15.730
= 0.117222434 %
Keseksamaan: K = 100 % - I
= 100 % - 0.117222434 %
K = 99.88277757%
Ralat t percobaan 1, percobaan dinamis dengan pegas
besar m= 0.0578 kg
No. t (detik) t - t ( t - t)2
1/2
40
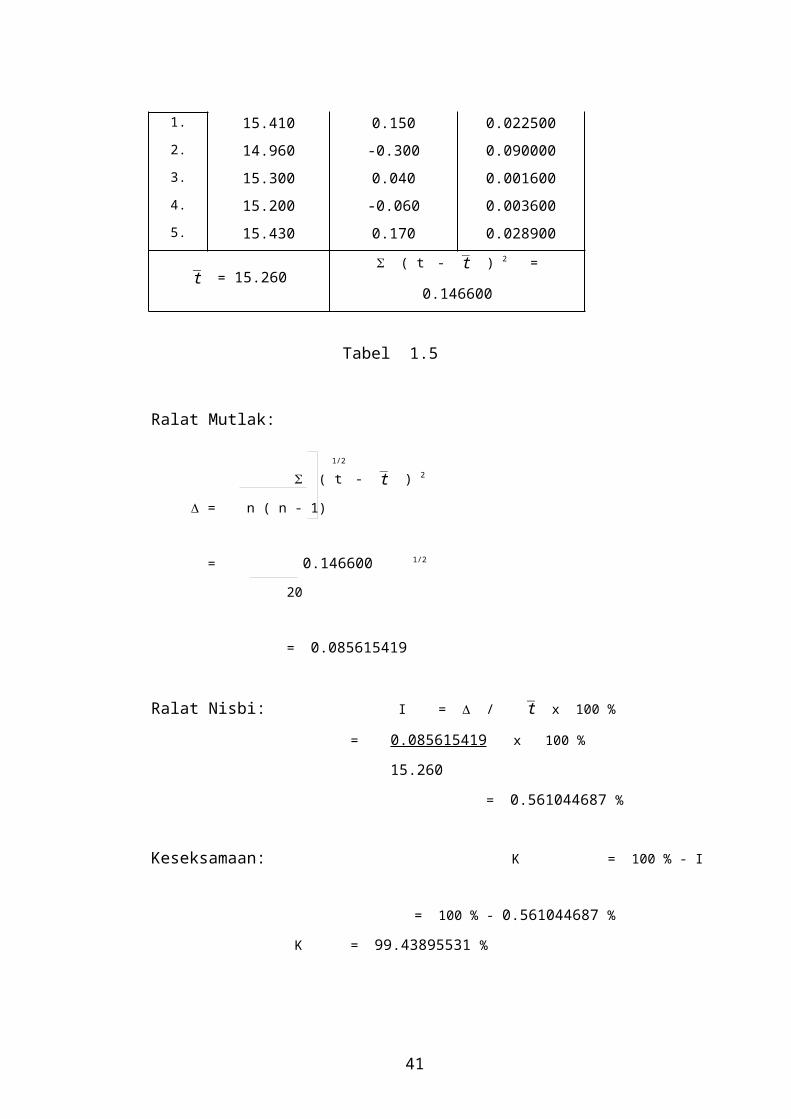
1. 15.410 0.150 0.0225002. 14.960 -0.300 0.0900003. 15.300 0.040 0.0016004. 15.200 -0.060 0.0036005. 15.430 0.170 0.028900
t = 15.260 ( t - t ) 2 =
0.146600
Tabel 1.5
Ralat Mutlak:
( t - t ) 2
= n ( n - 1)
= 0.146600 1/2
20
= 0.085615419
Ralat Nisbi: I = / t x 100 % = 0.085615419 x 100 %
15.260
= 0.561044687 %
Keseksamaan: K = 100 % - I
= 100 % - 0.561044687 %
K = 99.43895531 %
1/2
41
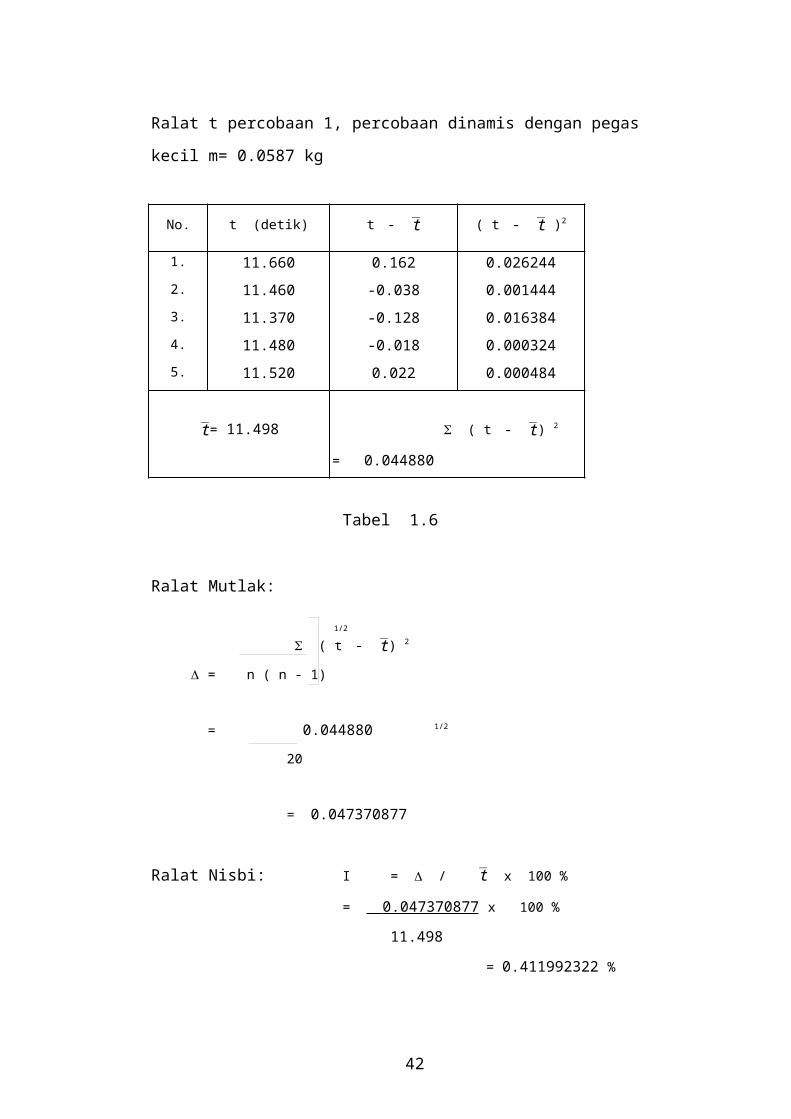
Ralat t percobaan 1, percobaan dinamis dengan pegas
kecil m= 0.0587 kg
No. t (detik) t - t ( t - t )2
1. 11.660 0.162 0.0262442. 11.460 -0.038 0.0014443. 11.370 -0.128 0.0163844. 11.480 -0.018 0.0003245. 11.520 0.022 0.000484
t= 11.498 ( t - t) 2
= 0.044880
Tabel 1.6
Ralat Mutlak:
( t - t) 2
= n ( n - 1)
= 0.044880 1/2
20
= 0.047370877
Ralat Nisbi: I = / t x 100 % = 0.047370877 x 100 %
11.498
= 0.411992322 %
1/2
42
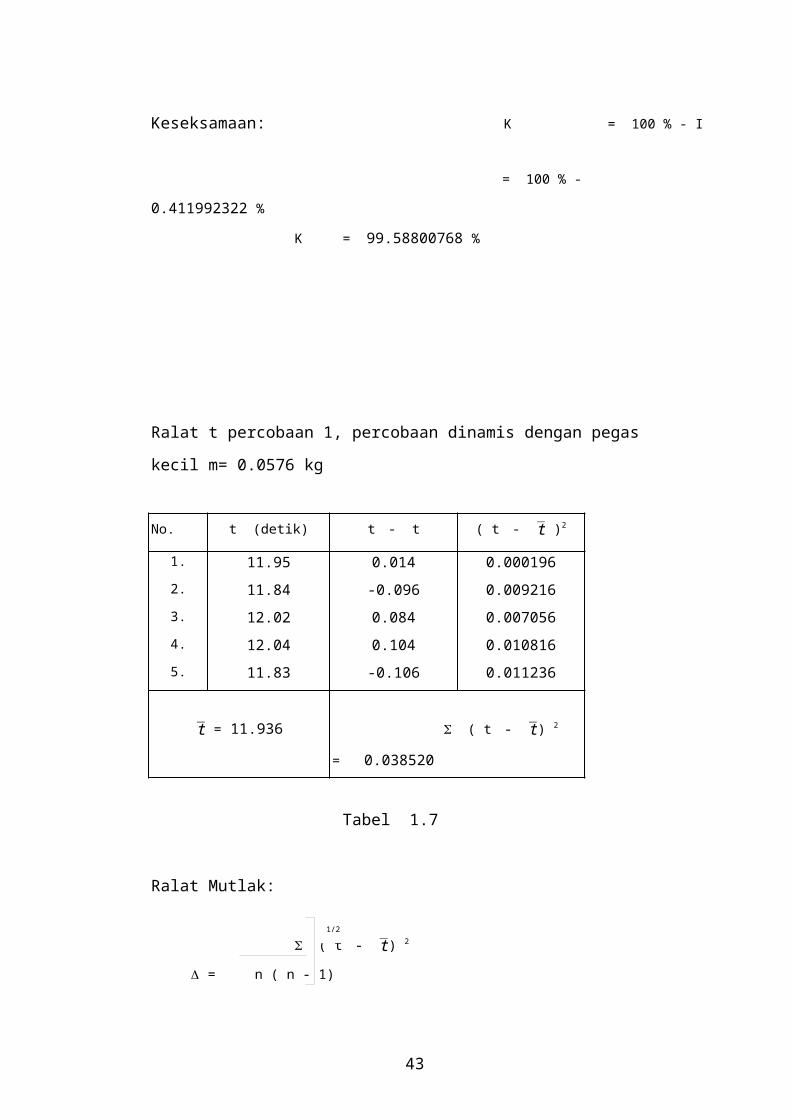
Keseksamaan: K = 100 % - I
= 100 % -
0.411992322 %
K = 99.58800768 %
Ralat t percobaan 1, percobaan dinamis dengan pegas
kecil m= 0.0576 kg
No. t (detik) t - t ( t - t )2
1. 11.95 0.014 0.0001962. 11.84 -0.096 0.0092163. 12.02 0.084 0.0070564. 12.04 0.104 0.0108165. 11.83 -0.106 0.011236
t = 11.936 ( t - t) 2
= 0.038520
Tabel 1.7
Ralat Mutlak:
( t - t) 2
= n ( n - 1)
1/2
43
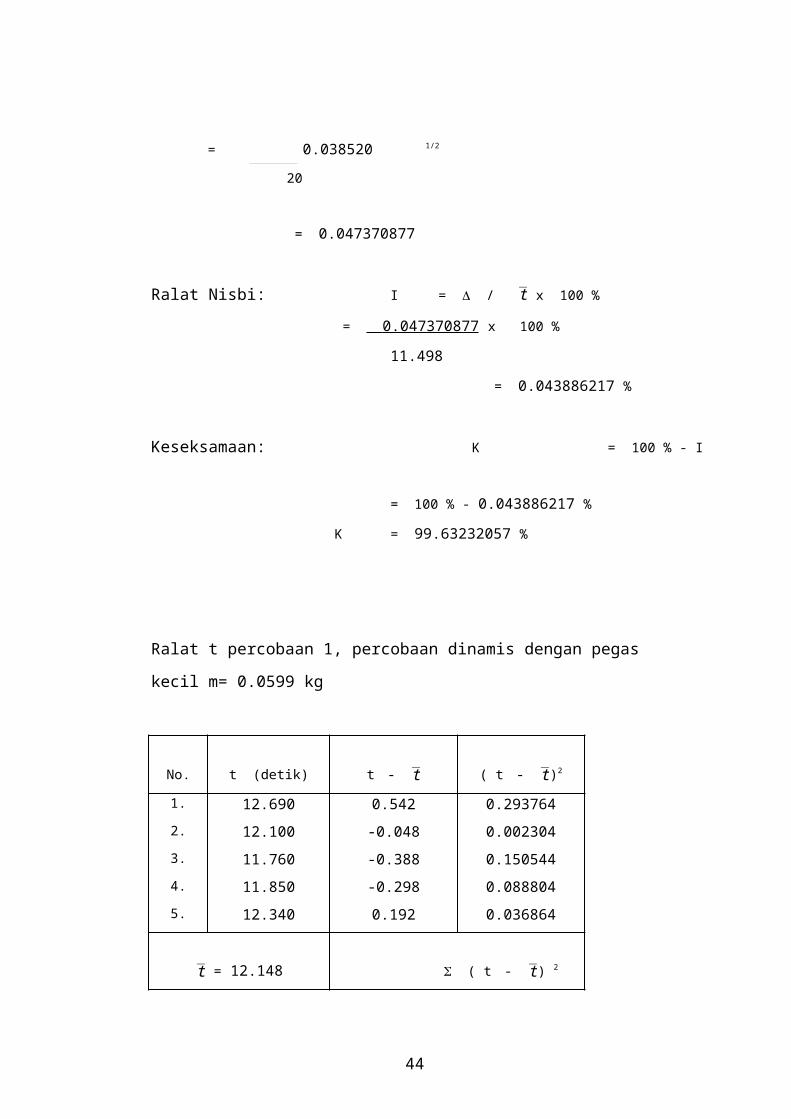
= 0.038520 1/2
20
= 0.047370877
Ralat Nisbi: I = / t x 100 % = 0.047370877 x 100 %
11.498
= 0.043886217 %
Keseksamaan: K = 100 % - I
= 100 % - 0.043886217 %
K = 99.63232057 %
Ralat t percobaan 1, percobaan dinamis dengan pegas
kecil m= 0.0599 kg
No. t (detik) t - t ( t - t)2
1. 12.690 0.542 0.2937642. 12.100 -0.048 0.0023043. 11.760 -0.388 0.1505444. 11.850 -0.298 0.0888045. 12.340 0.192 0.036864
t = 12.148 ( t - t) 2
44
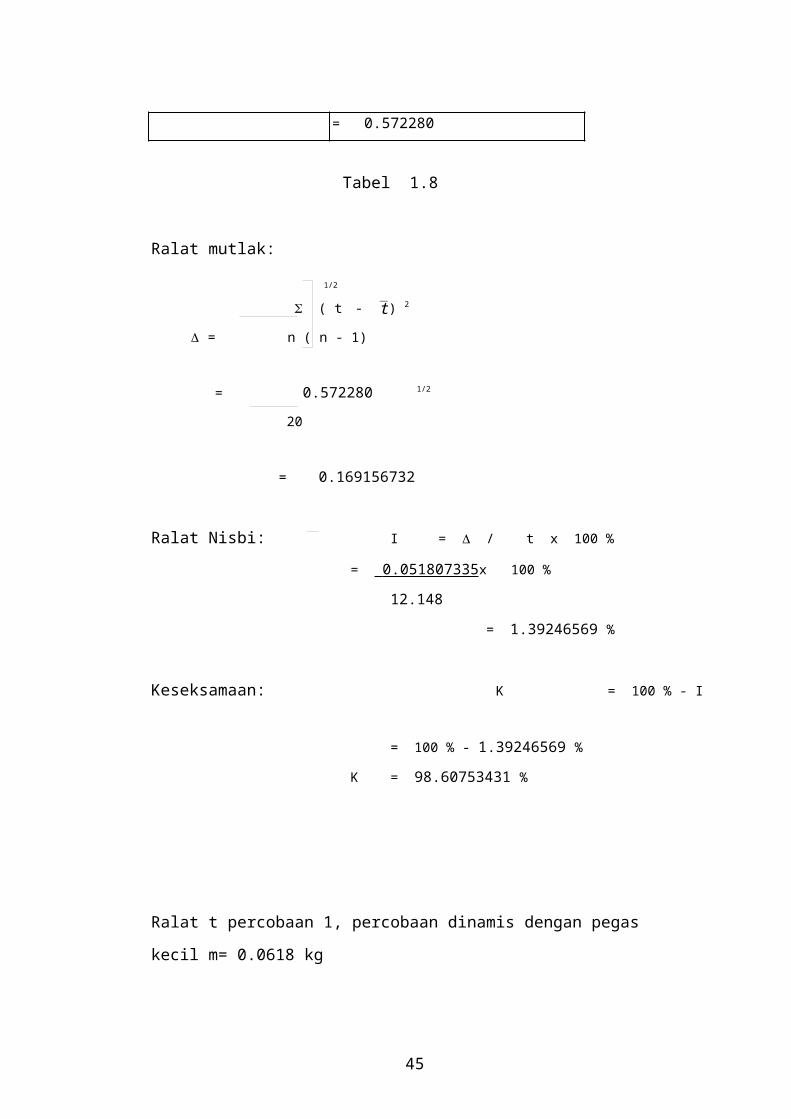
= 0.572280
Tabel 1.8
Ralat mutlak:
( t - t) 2
= n ( n - 1)
= 0.572280 1/2
20
= 0.169156732
Ralat Nisbi: I = / t x 100 %
= 0.051807335 x 100 %
12.148
= 1.39246569 %
Keseksamaan: K = 100 % - I
= 100 % - 1.39246569 %
K = 98.60753431 %
Ralat t percobaan 1, percobaan dinamis dengan pegas
kecil m= 0.0618 kg
1/2
45
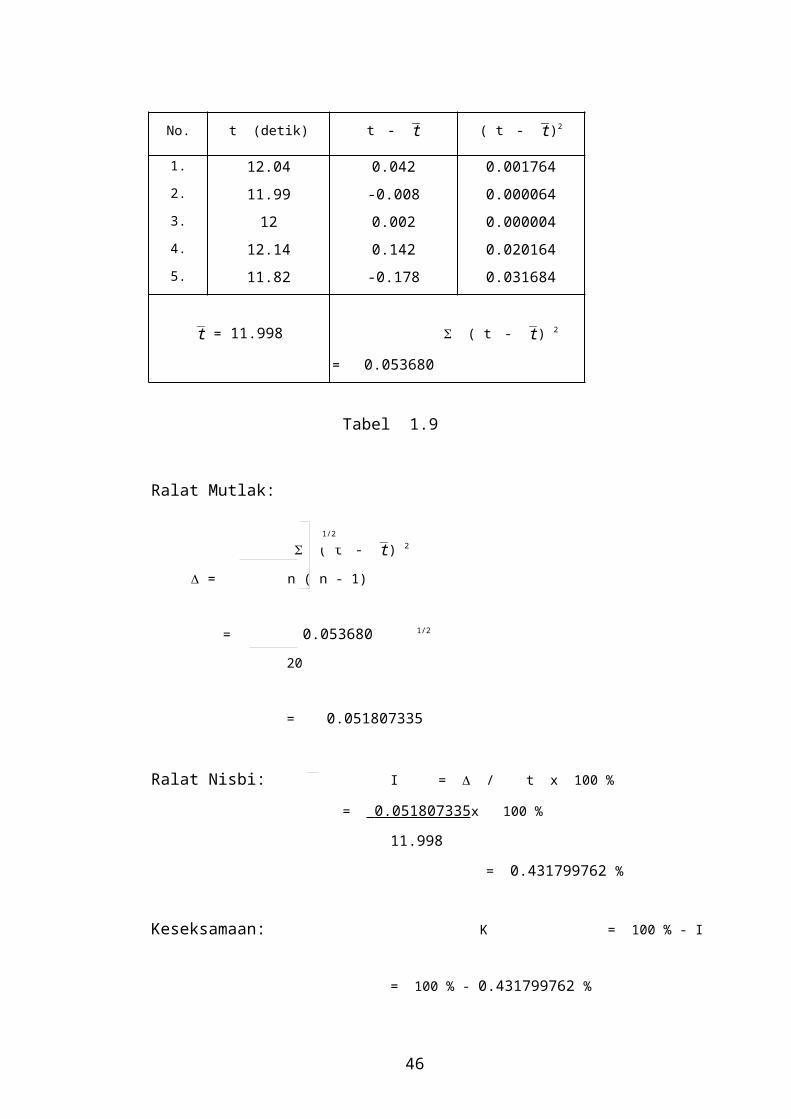
No. t (detik) t - t ( t - t)2
1. 12.04 0.042 0.0017642. 11.99 -0.008 0.0000643. 12 0.002 0.0000044. 12.14 0.142 0.0201645. 11.82 -0.178 0.031684
t = 11.998 ( t - t) 2
= 0.053680
Tabel 1.9
Ralat Mutlak:
( t - t) 2
= n ( n - 1)
= 0.053680 1/2
20
= 0.051807335
Ralat Nisbi: I = / t x 100 %
= 0.051807335 x 100 %
11.998
= 0.431799762 %
Keseksamaan: K = 100 % - I
= 100 % - 0.431799762 %
1/2
46
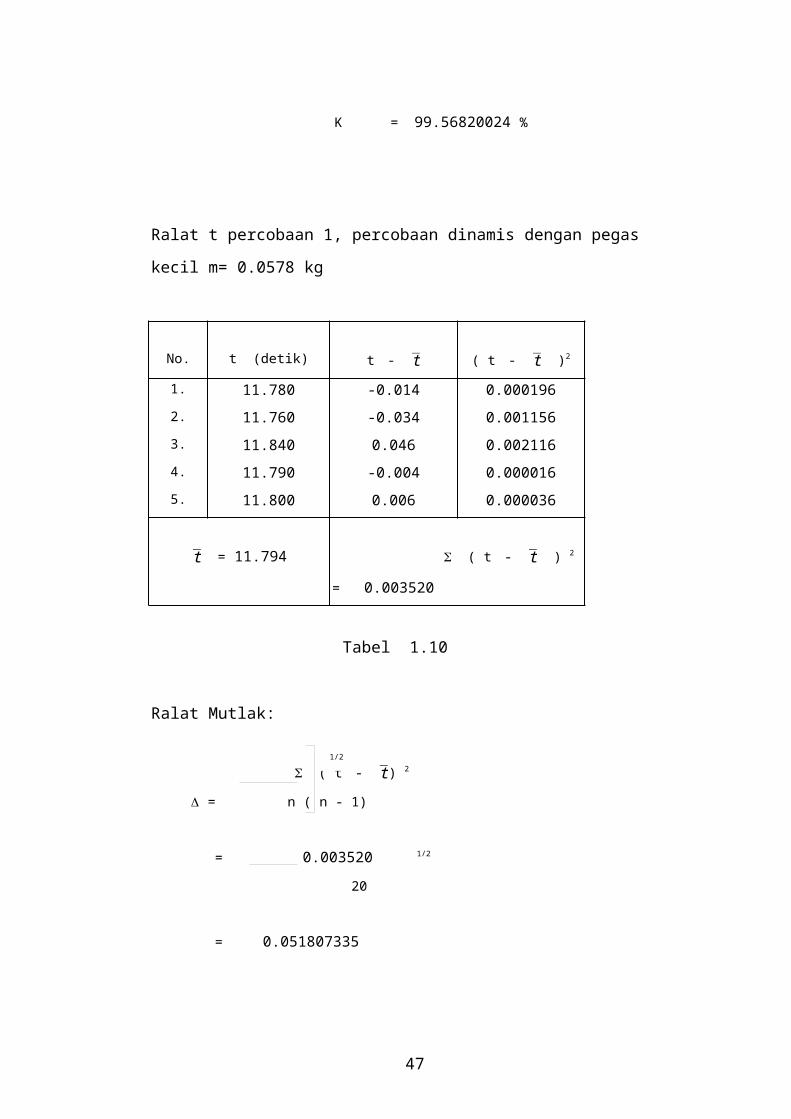
K = 99.56820024 %
Ralat t percobaan 1, percobaan dinamis dengan pegas
kecil m= 0.0578 kg
No. t (detik) t - t ( t - t )2
1. 11.780 -0.014 0.0001962. 11.760 -0.034 0.0011563. 11.840 0.046 0.0021164. 11.790 -0.004 0.0000165. 11.800 0.006 0.000036
t = 11.794 ( t - t ) 2
= 0.003520
Tabel 1.10
Ralat Mutlak:
( t - t) 2
= n ( n - 1)
= 0.003520 1/2
20
= 0.051807335
1/2
47
Ralat Nisbi: I = / t x 100 % = 0.013266499 x 100 %
11.794
= 0.112485155 %
Keseksamaan: K = 100 % - I
= 100 % - 0.112485155 %
K = 99.88751485 %
DAFTAR PUSTAKA
F.J. Bueche.2006.”FISIKA UNIVERSITAS”.Erlangga,
Jakarta.
Halliday, David.1999.”FISIKA”.Erlangga, Jakarta.
Id.wikipedia.org/wiki/hokum-newton.051013;20.00 WIB
Ishaq, Mohammad.2007”Fisika Dasar Edisi 2”.Graha Ilmu,
Bandung.
Sutrisno, 1986.”SERI FISIKA DASAR MEKANIKA”, ITB,
Bandung.
48

49