Finite domain simulations with adaptive boundaries: Accurate potentials and nonequilibrium movesets
14
Finite domain simulations with adaptive boundaries: Accurate potentials and nonequilibrium movesets Jason A. Wagoner and Vijay S. Pande Citation: The Journal of Chemical Physics 139, 234114 (2013); doi: 10.1063/1.4848655 View online: http://dx.doi.org/10.1063/1.4848655 View Table of Contents: http://scitation.aip.org/content/aip/journal/jcp/139/23?ver=pdfcov Published by the AIP Publishing This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP: 199.87.82.138 On: Wed, 15 Jan 2014 21:55:03
Transcript of Finite domain simulations with adaptive boundaries: Accurate potentials and nonequilibrium movesets

Finite domain simulations with adaptive boundaries: Accurate potentials andnonequilibrium movesetsJason A. Wagoner and Vijay S. Pande Citation: The Journal of Chemical Physics 139, 234114 (2013); doi: 10.1063/1.4848655 View online: http://dx.doi.org/10.1063/1.4848655 View Table of Contents: http://scitation.aip.org/content/aip/journal/jcp/139/23?ver=pdfcov Published by the AIP Publishing
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

THE JOURNAL OF CHEMICAL PHYSICS 139, 234114 (2013)
Finite domain simulations with adaptive boundaries: Accurate potentialsand nonequilibrium movesets
Jason A. Wagoner1,a) and Vijay S. Pande2
1Laufer Center for Physical and Quantitative Biology, Stony Brook University, Stony Brook,New York 11794, USA2Department of Chemistry, Department of Structural Biology, and Department of Computer Science,Stanford University, Stanford, California 94305-5080, USA
(Received 26 February 2013; accepted 26 November 2013; published online 20 December 2013)
We extend the theory of hybrid explicit/implicit solvent models to include an explicit domain thatgrows and shrinks in response to a solute’s evolving configuration. The goal of this model is to pro-vide an appropriate but not excessive amount of solvent detail, and the inclusion of an adjustableboundary provides a significant computational advantage for solutes that explore a range of con-figurations. In addition to the theoretical development, a successful implementation of this methodrequires (1) an efficient moveset that propagates the boundary as a new coordinate of the system,and (2) an accurate continuum solvent model with parameters that are transferable to an explicitdomain of any size. We address these challenges and develop boundary updates using Monte Carlomoves biased by nonequilibrium paths. We obtain the desired level of accuracy using a “decou-pling interface” that we have previously shown to remove boundary artifacts common to hybridsolvent models. Using an uncharged, coarse-grained solvent model, we then study the efficiency ofnonequilibrium paths that a simulation takes by quantifying the dissipation. In the spirit of optimiza-tion, we study this quantity over a range of simulation parameters. © 2013 AIP Publishing LLC.[http://dx.doi.org/10.1063/1.4848655]
I. INTRODUCTIONWe have developed a hybrid solvent model1 that, as in
previous methods,2–18 combines an explicit solvent represen-tation within a specified simulation domain with a contin-uum representation elsewhere. The major advancement of thismodel is the inclusion of a “decoupling interface,” a spa-tial region over which implicit interactions smoothly replaceexplicit molecules. Similar coupling methods are used inother multiscale simulation methods.19–24 For an uncharged,coarse-grained forcefield,25, 26 this model removes the arti-ficial interactions commonly found at the explicit/implicitboundary of more traditional hybrid methods and accuratelyreproduces solute thermodynamics with a significant reduc-tion in the number of degrees of freedom required for explicitsolvent methods.1
Here, we develop simulation methods that extend theflexibility of this model to include an explicit domain thatchanges size in response to an evolving solute conformation.The reason for using such an adjustable boundary is to modelan appropriate but not excessive amount of solvent detail forany particular solute configuration. This flexibility is desirablefor systems exploring conformational change, as the numberof molecules necessary to solvate even a simple peptide inan extended versus a collapsed state can vary significantly.This issue also arises in periodic explicit solvent simulations:a box size and number of solvent molecules that are suitablefor the majority of a simulation may lead to artificial interac-tions among periodic images when the solute visits a more ex-
tended conformation. Simply performing the simulation in alarger box of solvent–one suitable to the (perhaps infrequentlyvisited) extended states–is inefficient and sometimes compu-tationally intractable.
We will achieve the desired change in domain size bycoupling the position of the boundary to the solute configura-tion. This method requires (1) an efficient moveset that propa-gates the boundary as a new coordinate of the system, and (2)an accurate continuum solvent model with parameters that aretransferable to an explicit domain of any size.
Propagation of the explicit/implicit boundary is per-formed using Monte Carlo (MC) moves biased by nonequi-librium paths. The study of nonequilibrium transitions haslargely been developed in the context of work distribu-tions and free energy differences for simulations of drivenprocesses.27–38 The use of nonequilibrium transitions as partof a Monte Carlo moveset, as in this work, is also gainingtraction given their ability to explore transitions that may bedifficult to sample with traditional simulation techniques.39–44
Using principles outlined in the development of the Crooksfluctuation theorem,29 these nonequilibrium processes can becast as biased Monte Carlo moves that are later accepted orrejected within an equilibrium simulation. This method hasbeen derived in a very general framework as nonequilibriumcandidate Monte Carlo (NCMC).44 Here, we demonstratethat nonequilibrium paths can be used to transition betweenexplicit domains of different sizes within a hybrid solventsimulation.
It is imperative that the continuum solvent model pro-vides a very accurate representation of the influence from the
0021-9606/2013/139(23)/234114/13/$30.00 © 2013 AIP Publishing LLC139, 234114-1
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-2 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
bulk region in order to avoid biasing toward particular sizesof the explicit domain. Any such error would translate to abiasing in the solute configuration, since this coordinate iscoupled to the system’s boundary. Though our previous workdemonstrated this level of accuracy,1 the model requires achemical potential correction term that had to be determinedself-consistently for each domain size. This correction termaccounts for the gradient in chemical potential that arises fromremoving interactions across a spatial domain and is presentin other multiscale simulations that smoothly couple differ-ent levels of molecular granularity.19–24 The necessity of aniterative parameterization of this term presents a significantchallenge for these methods and, in particular, a simulationwith an adaptive boundary. Here, we develop a model capa-ble of predicting this term for an explicit domain of any sizewithout the need for iterative parameterization.
This paper develops the nonequilibrium moveset andboundary potential necessary for adaptive boundary simula-tions. The results indicate that our boundary potential is suf-ficiently accurate to model a system that is invariant with re-spect to the location of the explicit boundary. We also opti-mize the nonequilibrium transitions by quantifying the dis-sipation as a measure of path efficiency for an uncharged,coarse-grained system. This optimization is performed overa variety of paths, integrations schemes, and other simulationparameters. The application of these methods to biomolecu-lar systems, including analyses of system thermodynamic andkinetic properties, is reserved for a forthcoming paper.
II. THEORY
A. Summary of the algorithm
The proposed algorithm incorporates the boundary of theexplicit domain as an additional degree of freedom that mustbe efficiently sampled. For this purpose, we turn to MonteCarlo moves that update the explicit domain in discrete steps.The reason for this choice over other possible algorithms(such as an extended Lagrangian approach) is discussed inSec. II D.
The algorithm can be summarized as an alternating se-quence of two movesets:
1. For a fixed boundary position, the molecular coordinatesof the system are updated via standard molecular dynam-ics or Monte Carlo moves.
2. At some defined frequency, an update move is attemptedfor the boundary of the explicit domain. During this up-date, the solute will be held frozen while the rest of thesystem evolves via a nonequilibrium path in order torelax with respect to the candidate boundary. The finalstate is then accepted or rejected as a Monte Carlo movebiased by the nonequilibrium path.44
In Sec. II B, we derive the stationary probability distri-bution of the system’s molecular and boundary coordinates,providing a framework for the above sequence of moves. Thisdistribution function rigorously defines a finite simulation do-main that includes both an adjustable boundary and the decou-pling interface of our previous work.1 In Sec. II C, we discuss
the continuum solvent model to be used that (1) avoids a self-consistent parameterization for new domain sizes, and (2) issufficiently accurate so that the system is invariant with re-spect to the boundary location. Section II D discusses the im-plementation of nonequilibrium movesets in our simulations,including the framework for Monte Carlo moves that are bi-ased by nonequilibrium paths and the specific transition pathsthat are taken by our hybrid solvent simulations.
B. Framework of the hybrid solvent model
This development draws from the notation and frame-work of our previous work1 and that of Roux and co-workers.2, 5, 45 Consider a supersystem partition function of asolute immersed in bulk solvent
Z = 1
�3U�3NN !
∫�
d(Xu)∫
�
d(x1) . . . d(xN ) exp[−βU ],
(1)where U is the total potential energy of the system, β is theinverse thermal energy 1/(kBT), �U and �N are the thermal deBroglie wavelengths of solute and N solvent molecules, and(Xu, x1. . . xN) represent the degrees of freedom of the soluteand N solvent molecules. The factor of N! is inserted into thedenominator to account for the indistinguishability of thesesolvent molecules.
1. A finite domain with adaptive boundaries
We can partition the domain of our system into sepa-rate regions (� = �i(R) ∪ �o(R)), where the interior domain�i(R) is a sphere of radius R. We rewrite the partition functionas
Z = 1
�3U�3NN !
∫�
d(Xu)
×∫
�i(R)
∫�o(R)
d(x1) . . . d(xN ) exp[−βU ]
=N∑
n=0
1
�3U�3N
∫�
d(Xu)∫
�i(R)d(Xn)
1
n!
×∫
�o(R)d(ZN−n)
exp[−βU ]
(N − n)!, (2)
where the vectors Xn and ZN−n correspond to the config-urations of solvent molecules located in the inner (�i(R))and outer (�o(R)) regions, respectively, and the subscriptsof these vectors indicate the number of solvent molecules inthese regions.
We wish to couple the size of our inner region to the so-lute configuration. We define the function PR(Xu, R) that re-turns the joint probability of finding a particular radius R fora given solute configuration. Inserting this factor into the par-tition function
Z =N∑
n=0
1
�3U�3N
∫d(Xu)
∫dRPR(Xu, R)
×∫
�i(R)d(Xn)
1
n!
∫�o(R)
d(ZN−n)exp[−βU ]
(N − n)!. (3)
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-3 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
From this, we can define the joint probability of finding aninner domain of radius R, n solvent molecules within this do-main, and the configuration of interior coordinates as
P (Xu, Xn, n, R) = PR(Xu, R)
Z�3U�3Nn!(N − n)!
×∫
�o(R)d(ZN−n)exp[−βU ]. (4)
If we separate the total potential into inner-inner(Uii(Xu, Xn)), inner-outer (Uio(Xu, Xn, ZN−n)), and outer-outer (Uoo(ZN−n)) components, we can define the potentialof mean force (PMF) �W∗ for the bulk region as1, 46
exp[−β�W∗(Xu, Xn, R)]
=∫�o(R) d(ZN−n)exp[−β(Uio(Xu, Xn, ZN−n)+Uoo(ZN−n))]∫
�d(ZN−n)exp[−βU (ZN−n)]
.
(5)
Inserting this factor into Eq. (4)
P (Xu, Xn, n, R)
= PR(Xu, R)
Z�3U�3Nn!(N − n)!
×exp[−β(Uii(Xu, Xn) + �W∗(Xu, Xn, R))]
×∫
�
d(ZN−n)exp[−βU (ZN−n)]. (6)
In the limit of an infinitely large domain,
limN→∞, N
V→ρ
1
�3N−3n(N − n)!
∫�
d(ZN−n)exp[−βU (ZN−n)]
∝ exp[−β(N − n)μ], (7)
where V is the volume of the domain, ρ is the bulk den-sity, and μ is the chemical potential of one of the solventmolecules. Our probability distribution becomes
P (Xu, Xn, n, R) ∝ PR(Xu, R)
�3U�3nn!
×exp[−β(Uii(Xu, Xn) + �W∗(Xu, Xn, R)
+ (N − n)μ)]. (8)
2. A simplified PMF
The bulk solvent PMF given in Eq. (8) is a complex,many-body function that is difficult to reproduce with simplecontinuum models. This issue poses a significant obstacle forthe development of accurate hybrid solvent models. We mayconsider an alternate formalism in which the PMF is calcu-lated from a reference distribution that contains an unphysicalor coarse-grained potential V,
exp[−β�W†(Xu, Xn, R)] =∫�o(R) d(ZN−n)exp[−β(Uio(Xu, Xn, ZN−n) + Uoo(ZN−n))]∫�o(R) d(ZN−n)exp[−β(Vio(Xu, Xn, ZN−n) + Voo(ZN−n))]
(9)
leading to the probability distribution
P (Xu, Xn, n, R) = PR(Xu, R)
Z�3U�3Nn!(N − n)!
exp[−β(Uii(Xu, Xn) + �W†(Xu, Xn, R))]
×∫
�o(R)d(ZN−n)exp[−β(Vio(Xu, Xn, ZN−n) + Voo(ZN−n))]. (10)
It is instructive to compare Eqs. (8) and (10). In Eq. (8),we have a distribution that has completely removed the de-grees of freedom from the outermost domain but is left withthe formidable task of reproducing the bulk solvent PMF,W∗. In Eq. (10), we have constructed a PMF W† with re-spect to a coarse-grained potential V. We have shown that itis possible to define a potential V such that W† can be ac-curately reproduced with simple and efficient methods.1 Incontrast to W∗, the distribution containing W† requires theexplicit sampling of the coarse grained molecules to repro-duce the final integral in Eq. (10). In Sec. II B 3, we com-bine these two methods into a 3-region hybrid solvent modelthat balances the accuracy of a simplified PMF with the ef-ficiency of methods that fully remove the exterior degrees offreedom.
3. Inclusion of an intermediate domain
Consider the hybrid solvent model developed above withan additional, intermediate domain, � = �i(R) ∪ �o1(R)∪ �o2(R). The intermediate domain, �o1(R), is a sphericalshell that separates the inner region �i(R) from the outer-most region �o2(R). This spherical shell is bound by the radiiR − w and R, where the width w is a constant. We can extendEq. (4) to include this region,
P (Xu, Xn, n, R)
=N−n∑m=0
PR(Xu, R)
Z�3U�3Nn!m!(N − n − m)!
∫�o1(R)
d(Ym)
×∫
�o2(R)d(ZN−n−m)exp[−βU ]. (11)
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-4 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
We can separate the total potential into interactions within and between the three subdomains and define the solvent PMF,
exp[−β�W(Xu, Xn, n, R)] =∑N−n
m=0
[∫�o1 (R) d(Ym)exp[−β(Uio1 (Xu, Xn, Ym) + Uo1o1 (Ym))]∑N−n
m=0
[∫�o1 (R) d(Ym)exp[−β(Vio1 (Xu, Xn, Ym) + Vo1o1 (Ym))]
× ∫�o2 (R) d(ZN−n)exp
[−β(Uio2 (Xu, Xn, ZN−n) + Uo1o2 (Ym, ZN−n) + Uo2o2 (ZN−n)
)]]× ∫
�d(ZN−n)exp[−βU (ZN−n)]]
.
(12)
We have constructed this PMF both by integrating over the intermediate domain with respect to a coarse-grained potential,analogous to W† above, and by integrating over the outermost domain in a manner analogous to W∗. Inserting this factor intoEq. (11), we obtain a distribution for our hybrid model that can be used to calculate thermodynamic properties for the innermostdomain of our simulation,
P (Xu, Xn, n, R) =N−n∑m=0
PR(Xu, R)
Z�3U�3(n+m)n!m!
exp [−β (Uii (Xu, Xn) + (N − n − m)μ)]
×exp [−β�W (Xu, Xn, n, R)]
×∫
�o1 (R)d (Ym) exp
[−β(Vio1 (Xu, Xn, Ym) + Vo1o1 (Ym)
)]. (13)
Defining the total PMF as
W (Xu, Xn, n, Ym,m,R) = Uii (Xu, Xn) + Vio1 (Xu, Xn, Ym)
+Vo1o1 (Ym) + �W (Xu, Xn, n, R) , (14)
we can define the ratio of equilibrium probability densities for two states in our system. The integral over the intermediatedomain in Eq. (13) is removed because the coordinates Ym are explicitly sampled in these simulations,
P(Xub
, Xnb, nb, Ymb
,mb, Rb
)P
(Xua
, Xna, na, Yma
,ma, Ra
)= PR
(Xub
, Rb
)na!ma!�3(na+ma )
PR(Xua
, Ra
)nb!mb!�3(nb+mb)
exp[−β
(W
(Xub
, Xnb, nb, Ymb
,mb, Rb
)−W
(Xua
, Xna, na, Yma
,ma, Ra
) − (nb + mb − na − ma)μ)]
= PR(Xub
, Rb
)na!ma!
PR(Xua
, Ra
)nb!mb!
ρnb+mb−na−ma exp[−β
(W
(Xub
, Xnb, nb, Ymb
,mb, Rb
)−W
(Xua
, Xna, na, Yma
,ma, Ra
) − (nb + mb − na − ma)μ′)] . (15)
We have substituted in the excess chemical potential μ′, noting that μ = μ0 + μ′ and μ0 = 1β
ln[ρ�3] is the chemical potentialof a monatomic ideal gas that has the same density and particle mass of our solvent.
C. PMF approximation
Our coarse-grained potential of the intermediate domainuses a decoupling parameter λ to scale the interactions ofmolecules in this region,
λ (r, R) =
⎧⎪⎪⎨⎪⎪⎩
1 r ≤ R − w
1 + 2(r−R+w)3
w3 − 3(r−R+w)2
w2 R − w < r < R
0 r ≥ R
.
(16)
This parameter smoothly transitions particles between thefully interacting (λ = 1) and the fully decoupled (λ = 0)states. This serves to smoothly remove the local solvent in-
teractions that would be difficult to reproduce with a simplecontinuum model. The solvent used here interacts only via theLennard-Jones (LJ) potential and we decouple the explicit in-teractions in a manner directly analogous to that used in freeenergy studies,47
U (xi , xj , R) = λ(ri, R)λ(rj , R)ULJ (rsc(xi , xj )), (17)
where, assuming that the center of the explicit domain is atthe coordinate origin, ri = ‖xi‖. ULJ is the LJ potential and
rsc(xi , xj ) =(
1
2σ 6
ij (1 − λ(ri, R)λ(rj , R)) + ‖xi − xj‖6
) 16
,
(18)
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-5 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
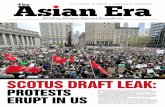
FIG. 1. Framework for the hybrid solvent model. The parameter λ describesthe strength of explicit interactions across the spatial domain. In the innerregion, molecules correspond to the λ = 1 state and are fully interacting. Inthe intermediate region, the explicit interactions are smoothly removed as thisparameter is switched to zero. Outside of this boundary, a continuum modelis used.
where σ ij is the LJ parameter for atoms i and j. Figure 1 il-lustrates the framework of the hybrid model using this decou-pling potential.
The total energy of this system is
W(Xu, Xn, Ym,m,R)
=∑
i
⎡⎣�wi(ri, R) + 1
2
∑j �=i
U (xi , xj , R)
⎤⎦ + wcav (R) ,
(19)
where �wi is a per-atom component of the implicit sol-vent model. The final term, wcav, is an additional implicitsolvent component that accounts for the difference betweenthe cost of cavity formation for explicit domains of differentsizes.48–53
As before, the implicit solvent model contains per-atomattractive (�w(att)), repulsive (�w(rep)), and chemical poten-tial correction (G) terms1
�wi(ri, R) = λ(ri, R)�w(att)(ri, R)
+ λ(ri, R)�w(rep)(ri, R) + G(ri, R). (20)
The attractive component, based on integration of the disper-sive solute-solvent interactions over the available bulk solventdomain, and repulsive component, a volume-based term, bothuse a distribution function of 1−λ(r, R). These componentsare more thoroughly discussed in Appendix A.
The factor G arises from the spatial removal of interac-tions across the intermediate domain (the difference in chem-ical potential between a fully coupled and a fully decoupledmolecule is equivalent to the solvation free energy). A largesolvent density gradient would be present in this system if thischange in chemical potential were not counteracted with thecorrection potential G. Our previous study relied on a sepa-rate parameterization of this term for every explicit region of
a different size. This work, in which the size of the domain isdynamic throughout a simulation, relies on a method of pre-dicting this term without separate parameterization for someparticular value of R.
We note the similarity between molecules in the interme-diate region of this hybrid model and a molecule being anni-hilated in a solvation free energy calculation: both moleculeshave their explicit interactions modified according to a soft-core scaling of the LJ potential47 via an alchemical parameterλ. A molecule in the hybrid model differs from that in a freeenergy calculation in that, for the hybrid model, the entire sys-tem is subject to some value of the decoupling parameter. Wewill approximate the chemical potential correction as
G (ri, R) = �Fsolv (λ (ri, R)) + E (λ (ri, R)) , (21)
where �Fsolv (λ) is the solvation free energy of a solventmolecule with respect to the alchemical parameter λ and E(λ)is a λ-dependent error term that we have empirically observedto be independent of R. We posit that E(λ) accounts for varia-tions in the contact density between molecules as the repulsiveinteractions are removed, an effect that is rapidly varying withrespect to λ and slowly varying with respect to R. Note that�Fsolv (0) = μ′ and �Fsolv (1) = 0. The parameterization ofthis model is described in Sec. III B.
D. Nonequilibrium Monte Carlo movesets
1. Overview
By introducing an explicit domain that is a function of thesolute configuration, we have added an additional degree offreedom that must be propagated in a simulation. An extendedLagrangian approach, which would alter the explicit domainin a dynamic fashion, is possible but undesirable. This is be-cause both the implicit solvent and the scaled explicit interac-tions are dependent on the location of the explicit boundary.Changing this coordinate in a dynamic fashion would requirecalculation of the derivative of these interactions with respectto the explicit boundary. Such a calculation is considerablycomplex, especially given that the bulk PMF contribution istabulated.
Thus, we turn to Monte Carlo methods that update theexplicit domain in discrete steps. Within a static explicit re-gion, the simulation will progress according to a combina-tion of standard molecular dynamics and Monte Carlo moves.At some defined frequency, we will attempt to update the ex-plicit domain of our system, at which point we must eitherinsert or delete a chunk of the explicit region correspondingto the outermost shell of solvent molecules. The obstacle ofthis algorithm is the selection of a candidate with reasonableacceptance probability in the final state–a configuration thatis in equilibrium with the new explicit boundary. Generatinga new configuration with any reasonable acceptance probabil-ity is unlikely with a single-step Monte Carlo move–such amoveset would have to be particularly clever or derived withextensive knowledge of the partition function.
Fortunately, successful candidates can be efficiently gen-erated using Monte Carlo moves biased by nonequilib-rium paths. This simulation technique is developed from
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-6 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
straightforward extensions to the original presentation of theCrooks fluctuation theorem29 and has also been presented ina very general framework as NCMC.44
Recall that the detailed balance condition imposes that,for a transition T between initial i and final f states,the forward and reverse acceptance probabilities (A) mustsatisfy
P (Xi)T (Xi → Xf )A(Xi → Xf )
= P (Xf )T (X̃f ,→ X̃i , )A(X̃f ,→ X̃i , ). (22)
The Metropolis criterion satisfies this requirement,
A(Xi → Xf ) = min
(1,
T (X̃f → X̃i)
T (Xi → Xf )
P (Xf )
P (Xi)
), (23)
where a biased MC move corresponds to the case in which theselection probabilities T are not symmetric. The tilde impliesreversal of the momenta. If the candidate transition is gen-erated by a dynamics move, then the balance condition im-poses that the momenta must be reversed either upon moveacceptance or upon move rejection,44 though we have re-cently derived a method that relaxes this constraint and re-sults in better acceptance probabilities and simulation mixingtimes.54
We begin with a state of our system defined by thegeneric coordinate X0, which implies the positions, momenta,and number of particles for a given state. X0 is taken from anensemble governed by the Hamiltonian H0. We wish to drivethe system to a new state X1 governed by the HamiltonianH1. To do so, we construct a series of moves accompanied bya control parameter αi ∈ [0, 1] (note that the control param-eter is traditionally presented as λ). In this work, α is variedalong equally spaced intervals: αi = i
Nα, where Nα defines the
discretization. This parameter allows us to define an interme-diate Hamiltonian of the system, Hi. The exact constructionof Hi may vary for different paths, though the endpoints areconstrained to the initial and final states (H0 and H1). Betweenthe states i = 0 and i = Nα , the system is updated via somecombination of moves that fall into two classes. The first typeof move propagates the control parameter from αi to αi+1.The second type propagates the configuration, using some al-gorithm governed by the intermediate Hamiltonian Hi, fromXj
i to Xj+1i .
If the two sub-Hamiltonians H0 and H1 are part of alarger ensemble, we can use this protocol as a simple biasedMC move that can be accepted or rejected with the standardcriterion described by Eq. (23). The transition probabilitiesfrom state j to j+1 in the system governed by Hi are definedas
T(Xj
i → Xj+1i
)T
(X̃j+1
i → X̃j
i
) = exp[ − β�s
(Xj
i → Xj+1i
)], (24)
where �s(Xj
i → Xj+1i ) is the relative action, dictated by the
particular algorithm that is used. The exact form that the rela-tive action takes in this work is discussed in Appendix B.
We can calculate the overall transition probability of thisnonequilibrium moveset
T(X0
0 → XN1Nα
) =Nα∏i=0
Ni−1∏j=0
T(Xj
i → Xj+1i
), (25)
where Ni is the number of transformations made while thesystem is governed by Hi. Also note that X0
0 = X0 and XN1Nα= X1, the initial and final states of this nonequilibrium
moveset. This transition probability obeys the condition
T (X0 → X1)
T (X̃1 → X̃0)= exp[−β�S(X0 → X1)], (26)
�S(X0 → X1) =Nα∑i=0
Ni−1∑j=0
�s(Xj
i → Xj+1i
). (27)
Note that Eq. (26) is simply the Crooks fluctuation theoremwritten in terms of the relative path action.29 Inserting this re-sult into Eq. (23), we can define the overall acceptance prob-ability for this nonequilibrium moveset
A(X0 → X1) = min(1, exp[−β(H1(X1)
−H0(X0) − �S(X0 → X1))]). (28)
2. Nonequilibrium paths for hybrid solvent models
Here, we define the paths that are taken for hybrid solventsimulations, where the initial and final states correspond toexplicit regions of different sizes. For these paths, the solutewill be frozen in configuration Xua
= Xub. We use Eqs. (15)
and (28) to give the final acceptance probability
A[(
Xua, Xna
, na, Yma,ma, Ra
) → (Xub
, Xnb, nb, Ymb
,mb, Rb
)]
= min
(1,
PR(Xub, Rb)na!ma!
PR(Xua, Ra)nb!mb!
ρnb+mb−na−ma exp[β(nb + mb − na − ma)μ′]
×exp[ − β
(W
(Xub
, Xnb, Ymb
,mb, Rb
) − W(Xua
, Xna, Yma
,ma, Ra
))
+β�S[(
Xua, Xna
, na, Yma,ma, Ra
) → (Xub
, Xnb, nb, Ymb
,mb, Rb
)]]). (29)
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-7 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
FIG. 2. The first move of a nonequilibrium transition between a starting con-figuration (green) for a sphere of radius Ra. The boundary of the explicit do-main is instantaneously moved from Ra to Rb while this new spherical shellis filled with random insertions of particles. At this point, the Hamiltonian ofthe system remains unaltered and all inserted particles (red) are noninteract-ing. Following this insertion, the Hamiltonian of the system is updated viathe nonequilibrium methods described in the text.
Care must be taken with the nonequilibrium path in orderto ensure appropriate growth or annihilation of the subdomainof interest. If Rb > Ra, we note that when α = 0, any particleat position rj > Ra is completely noninteracting (the decou-pling parameter λ is set to 0). Thus, we can begin the path byinstantaneously moving the boundary of the explicit domainfrom Ra to Rb and filling the new spherical shell with randominsertions of particles. At this point, the Hamiltonian remainsunaltered. The number of insertions made is chosen accordingto the probability distribution of ideal particles,
T insdR
(nid
a
) = (ρVdR)nida
ZiddRnid
a !, (30)
where VdR is the volume of the spherical shell bound byRa and Rb, nid
a is the number of inserted solvent molecules,
and ZiddR = ∑∞
nida =0
(ρVdR)nida
nida ! . This insertion step is illustrated
in Figure 2. Following insertion, the molecular configura-tion is evolved along the nonequilibrium path as described inSec. II D. The α-dependent Hamiltonian is defined below.
In the reverse transition, we replace the initial randominsertion with a final deletion of all molecules at positionsri > Ra with a probability of 1, after which the boundary ofthe system is moved from Rb to Ra. Because the insertion ofideal gas particles is performed via the exact distribution, theratio of transition probabilities for the insertion and deletionsteps cancels exactly with the contribution to the overall con-figurational probability ratio given in Eq. (29).
We present two definitions for the intermediate Hamilto-nian Hi along the path between states a and b. Recall that, for apath of Nα steps, our control parameter is defined as αi = i
Nα.
The direct Hamiltonian scaling method will simply definethe intermediate Hamiltonian as a linear combination of thetwo Hamiltonian’s defined by the radii Ra and Rb,
Hi(Xu, XN,Ra, Rb)
= (1 − αi)W(Xua
, Xna, na, Yma
,ma, Ra
)+αiW
(Xub
, Xnb, nb, Ymb
,mb, Rb
). (31)
The soft-core Hamiltonian scaling method will also definethe intermediate Hamiltonian as a combination of the twoHamiltonian’s defined by Ra and Rb, but rather than a linearcombination, will directly scale the decoupling parameter λ
for every particle in the system
Hi(Xu, XN,Ra, Rb)
= Wαλ(Xua
, Xna, na, Yma
,ma, Ra, (1 − α))
+Wαλ(Xub
, Xnb, nb, Ymb
,mb, Rb, α), (32)
where the superscript αλ now denotes a modification to thePMF defined by Eq. (19) for which every instance of the de-coupling parameter λ will be scaled by the seventh argumentof Wαλ (either α or 1 − α in this case) except for the distribu-tion function hi (Eq. (A5) in Appendix A). This is identical tothe direct Hamiltonian method except that the LJ interactionsare scaled in a soft-core manner defined in Eq. (17).
3. Path optimization
The efficiency of a nonequilibrium transition can bequantified with the dissipation that is accumulated. Sivak andCrooks55 have derived a friction tensor that can be used tobound the dissipation for nonequilibrium paths. Here, we op-timize simulation parameters with a direct calculation of thedissipation
〈(H1(x1) − H0(x1) − �S(X0 → X1) − �F (X0 → X1))2〉,(33)
where the average is performed over all paths, includingthe initial and final configurations. If the configurationalupdates are performed according to a Metropolis criterion,the quantity of interest corresponds to dissipated work (seeAppendix B 1),
〈(W (X0 → X1) − �F (X0 → X1))2〉 ≈ 〈W 2〉, (34)
where the final step is taken because, for the hybrid model,there should be no net change in free energy for these tran-sitions once wcav is appropriately accounted (this point isdemonstrated in Sec. IV). For paths generated using dynamicsmoves not subject to a Metropolis criterion, the term “work”is a misnomer given that the actual quantity that we are com-puting is the difference between the change in energy and therelative action (see Appendix B for a discussion of transitionprobabilities for the algorithms used in this work).
III. METHODS
A. Simulation details
Simulations were conducted using a monatomic watermodel from the MARTINI coarse-grained force field25, 26 anda modified version of GROMACS 3.3.1.56 Simulations werecoupled to a heat bath at 400 K using either the Andersenthermostat,57 the stochastic velocity rescaling method,58 orthe Langevin integrator of Bussi and Parrinello59 (adoptedfor nonequilibrium transitions by Sivak et al.60). Simulationswere performed using a LJ potential that is switched at 0.9nm and cut off at 1.2 nm in conjunction with a dispersive tailcorrection.61 Explicit solvent simulations were performed us-ing a 10 fs time step. Unless otherwise stated, hybrid simu-lations were performed using a 20 fs time step. All full ex-plicit simulations were performed using the reduced-flipping
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-8 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
(a) (b)
(c)
FIG. 3. Density profiles, for which the density is expected to equal the bulk value everywhere, for three hybrid domain sizes, R = 2.5, 3.5, 4.5 nm. As opposedto previous methods, these simulations do not require separate parameterization of the bulk PMF contribution. (a) R = 2.5 nm, the maximum relative error indensity is 0.01. (b) R = 3.5 nm, the maximum relative error in density is 0.01. (c) R = 4.5 nm, the maximum relative error in density is 0.03.
generalized hybrid Monte Carlo (HMC) algorithm54 to ensuresampling of the desired distribution.
B. PMF parameterization
As described in Sec. II C and Appendix A, the implicitsolvent model used in this work is
�w(ri, R) = �Fsolv(λ(ri, R)) + λ(ri, R)�w(att)(ri, R)
+ λ(ri, R)�w(rep)(ri, R) + E(λ(ri, R)). (35)
The chemical potential correction term has already been de-termined self-consistently for R = 1.5 nm and R = 3.5 nm.1
The total PMF for these systems, labeled �w0(ri, R), is usedto optimize parameters of Eq. (35). If we define the error at agiven radial value,
e(ri, R) = �w0(r−1(λ,R), R) − �w(r−1(λ,R), R), (36)
where r−1(λi, R) is the inverse of Eq. (16), then the opti-mal set of parameters for Eq. (35) is found by minimizingthe value of 1
Nλ
∑Nλ
i=0 ‖e(λi, 1.5) − e(λi, 3.5)‖ while iterat-ing over a set of test parameters (σ s ∈ [0, 0.45] nm andp ∈ [0, 100] kJ/mol/nm3). Nλ gives the number of testdata points and the parameters σ s and p are described inAppendix A. The systematic term was then set as the aver-age of the error, E(λ) = 1
2 (e(r−1(λi), 1.5) + e(r−1(λi), 3.5)).Following this initial parameterization, the systematic
term E(λ) was optimized on a set of bulk solvent densityprofiles for two explicit regions of size R = 2.0 nm andR = 4.25 nm. The optimization was similar to that usedpreviously:1 the density profiles were collected and, if thedensity was higher or lower than expected in a given re-
gion, the value of the systematic term at that particular valueof λ was raised or lowered in increasingly small incrementsuntil convergence was reached. We tested the accuracy ofthe resulting PMF approximation by calculating bulk den-sity profiles for systems containing no solute in which allsolvent molecules are unrestrained. These calculations wereperformed for spherical domains of size R ∈ {2.5, 3.5, 4.5}nm. In the absence of any error in our PMF approximation,we would expect to find an average density of ρ everywherewithin the spherical domain.
It is necessary for us to determine the nature of thepenalty associated with cavity formation, wcav(R). Based onstudies of spherical cavity formation,48–53 we would expectthis term to scale with some combination of the spherical do-main’s volume, surface area, and curvature. As such, we usethe functional form
wcav(R) = 4
3πpcavR
3 + 4πγ
(1 − 2δ
R
)R2. (37)
FIG. 4. Normalized density profile for the radial coordinate of the explicitdomain, R, for simulations of bulk solvent in which R was allowed to movefreely.
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-9 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
TABLE I. Comparison of the mean-squared dissipated work, 〈W 2〉(kJ/mol)2, obtained from the direct-scaling and soft-core Hamiltonian scal-ing methods. These calculations were performed using the Langevin integra-tor with τ = 1.0 ps, direct Hamiltonian scaling, an integration time step of 20fs, and a total transition time of 80 ps.
HMC no HMC
Direct scaling 10.5 ± 0.12 174 ± 2.13Soft-core scaling 3.34 × 103 ± 36.6 1.21 × 103 ± 19.9
In general, the constants pcav, γ , and δ can be connected tothermodynamic quantities. However, given the nature of thedecoupling boundary used in our simulations, the growth of aspherical cavity in this model is not representative of any realsystem and these are treated as free parameters. Parameteri-zation of wcav is described in the supplementary material.62
C. Path optimization
We will study all parameters associated with the nonequi-librium transitions on a system of bulk solvent being trans-formed from an explicit domain of R = 1.95 nm to oneof R = 2.0 nm, both with a switching window width ofw = 0.5 nm. Transitions along the reverse path will alsobe simulated. Optimal simulation parameters are determinedby minimizing the mean-squared dissipated work 〈W 2〉, de-scribed in Sec. II D 3.
IV. RESULTS AND DISCUSSION
A. Accuracy of the boundary potential
1. Bulk density profiles
Following parameterization of our continuum model, asdescribed in Sec. III B, we find the optimal parameters to bea probe radius of σ s = 0.28 nm and a solvent pressure of p= 20.21 kJ/nm3 (these parameters are discussed at length inAppendix A). Figure 3 displays a test set of bulk density pro-files calculated using the resulting potential with the hybridmodel for explicit regions of three different sizes. With no so-lute, we expect to observe bulk density everywhere within theexplicit domain. The maximum relative error in density forthese three domain sizes is 3% for R = 4.5 nm, demonstratingthat our method is capable of accurately reproducing the bulksolvent PMF over the range of explicit domains tested.
2. Contribution from cavity formation
The bulk density profiles represent encouraging resultsbut offer no test of the PMF difference for explicit domains
FIG. 5. The distribution of dissipated work obtained for the forward andreverse transitions from an explicit domain of R = 1.95 nm to one ofR = 2.0 nm. Transitions were performed using the Langevin integrator withτ = 1.0 ps, direct Hamiltonian scaling, an integration time step of 20 fs,and a total transition time of 80 ps. For this set of data, 〈W 2〉 = 10.5± 0.12 (kJ/mol)2.
of varying size, accounted for with the cavitation componentwcav. An accurate representation of this term is necessary toensure that the system is invariant with respect to the size ofthe explicit domain. Parameterization of this term is describedin the supplementary material.62 Optimal parameters for wcav
(see Eq. (37)) are found to be pcav = 51.294 kJ/mol/nm3, γ
= −5.010 kJ/mol/nm2, and δ = 0.907kJ/mol/nm.These parameters were used in a set of simulations of
bulk solvent in which the value of R was allowed to fluctuateunrestrained within R ∈ [2.0, 2.5] nm (see the supplemen-tary material62 for more detail on these simulation methods).Figure 4 shows that the resulting distribution of R is unbiasedwithin this domain. As desired, this demonstrates that our ap-proximation for the PMF is quite accurate and that the systemis invariant to the radius of the explicit domain.
B. Nonequilibrium path optimization
Here, we discuss our optimization of the simulationparameters for nonequilibrium transitions accompanying asystem of bulk solvent being transformed from an explicitdomain of R = 1.95 nm to one of R = 2.0 nm. The stan-dard parameter set will correspond to the Langevin integratorwith τ = 1.0 ps, direct Hamiltonian scaling, an integrationtime step of 20 fs, an 80 ps total transition time, and HMCperformed at every configurational update. In our discussion
TABLE II. Comparison of the mean-squared dissipated work 〈W 2〉 (kJ/mol)2 for Langevin integration and thestochastic velocity rescaling thermostat. 〈W 2〉 is calculated over a range of values for the relaxation constant τ .These calculations were performed using HMC, direct Hamiltonian scaling, an integration time step of 20 fs, anda total transition time of 80 ps.
Integratorτ (ps)
0.01 0.1 1.0 10.0 100.0
Langevin integration 53.4 ± 1.31 14.6 ± 0.25 10.5±0.12 29.6±0.26 2.56 × 103 ± 1.01 × 103
Stochastic velocity rescaling 168 ± 1.33 21.6 ± 0.30 25.1 ± 0.56 284 ± 16.3 7.224 ± 4.644
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-10 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
TABLE III. Mean-squared dissipated work, 〈W 2〉 (kJ/mol)2, calculated for a search of the parameters associatedwith the Andersen thermostat, which are described in the text. These calculations were performed using directHamiltonian scaling, an integration time step of 20 fs, and a total transition time of 80 ps. Parenthetical values areobtained using the same parameters but without HMC.
PA
FA (ps)
0.02 1.0 4
1.0 38.80 ± 1.39 11.20 ± 0.44 14.45 ± 0.51(1.61 × 105 ± 1.13 × 103) (3.52 × 104 ± 869) (1.96 × 105 ± 2.36 × 103)
0.25 4.55 × 104 ± 3.43 × 104 7.77 × 105 ± 4.41 × 105 2.73 × 104 ± 1.84 × 104
(5.41 × 104 ± 4.33 × 103) (5.43 × 104 ± 3.35 × 103) (4.48 × 104 ± 2.33 × 103)0.05 9.27 × 103 ± 3.23 × 103 5.99 × 105 ± 3.45 × 105 7.95 × 103 ± 1.36 × 103
(5.71 × 104 ± 5.64 × 103) (4.71 × 104 ± 3.46 × 103) (4.79 × 104 ± 3.92 × 103)0.01 4.95 × 105 ± 1.61 × 105 4.40 × 104 ± 2.14 × 104 7.05 × 103 ± 1.34 × 103
(4.55 × 104 ± 4.18 × 103) (4.42 × 104 ± 3.39 × 103) (5.93 × 104 ± 3.88 × 103)
of path optimization, we will discuss only the parameters thatdiffer from this standard set.
1. Hamiltonian scaling methods
We begin the analysis of nonequilibrium transitions bycomparing the soft-core and direct scaling methods, describedin Sec. II D 2. Table I compares these two methods. The scal-ing methods provide quite different results, as 〈W 2〉 = 10.5± 0.12 (kJ/mol)2 for the direct scaling method and〈W 2〉 = 3.34 × 103 ± 36.6 (kJ/mol)2 for the soft-core scalingmethod. Table I also lists results for these transitions whenHMC is not used at every step, showing a significant increasein dissipation. The distribution of dissipated work values ac-cumulated in the forward and reverse processes using the di-rect scaling method are shown in Figure 5.
2. Thermostatting methods
Here, we analyze the use of three different integra-tion schemes: Verlet integration coupled with an Andersen
thermostat,57 the stochastic velocity rescaling method,58 andLangevin integration.59 See Appendix B for a discussion ofthese algorithms and the associated transition probabilities.
The time constant τ defines the relaxation rate (or inverseof the friction coefficient τ = 1/γ ) for Langevin integrationand the stochastic velocity rescaling thermostat. Table II givesthe results for transitions calculated using these two integra-tors over a range of values for τ . Clearly, this parameter bearsa significant impact on the dissipation of these paths and theoptimal value is found in neither limit of high nor low fric-tion (minimum dissipation corresponds to τ = 0.1 ps for thestochastic velocity rescaling thermostat and τ = 1.0 ps forLangevin integration).
Similar results are observed for the Andersen thermo-stat, where the frequency at which velocities are rescaledhas a very significant impact on the dissipation. For ourimplementation of the Andersen thermostat, described inAppendix B 2, velocities are rescaled at set intervals of fre-quency FA. At a particular update, the probability of select-ing a new velocity for any degree of freedom is given bythe parameter PA ∈ [0, 1]. Table III shows the mean-squared
FIG. 6. Plots of the mean-squared dissipated work, 〈W 2〉, for different simulation parameters. These calculations were performed using the Langevin integratorwith τ = 1.0 ps, direct Hamiltonian scaling, and HMC at every configurational update. (a) Log plot of 〈W 2〉 as a function of integration time step. Simulationswere performed with 4000 total steps. (b) Log-log plot 〈W 2〉 as a function of total transition time. These transitions were performed using a 20 fs integrationtime step. The linear relationship shown here demonstrates the inverse relationship between mean-squared dissipated work and the total transition time.
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-11 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
FIG. 7. The frequency of a particular value of accumulated work, W , for theforward and reverse transitions calculated using 80 ps and 640 ps transitiontimes. These calculations were performed using Langevin integration with τ
= 1.0 ps, direct Hamiltonian scaling, and an integration time step of 20 fs.For this set of data, 〈W 2〉 = 10.5 ± 0.12 (kJ/mol)2 for the 80 ps transitionsand 〈W 2〉 =1.24 ± 0.023 (kJ/mol)2 for the 640 ps transitions.
dissipated work obtained for a set of these parameters. Ascan be seen, dissipation tends to be minimized at higher col-lision rates: 〈W 2〉 = 11.20 ± 0.44 (kJ/mol)2 is obtained for(PA = 0.5, FA = 0.02 ps), or an update of half of the system’sdegrees of freedom at every integration step. This table alsoshows the significant increase in dissipation obtained whenHMC is not used for the configurational updates.
3. Integration time step and total transition time
Figure 6(a) illustrates the effect of time step on thenonequilibrium transitions with and without HMC. Each tran-sition is performed with 4000 integration steps so that the to-tal transition time varies accordingly. As is demonstrated, theoptimal time step is found to be 20 fs used with HMC. De-viations from this time step can cause a significant increasein dissipation. This plot once again demonstrates the crucialrole that HMC plays in reducing dissipation along a nonequi-librium transition, particularly for larger values of the integra-tion time step.
Figure 6(b) shows the change in dissipation as the to-tal transition time is increased. The log-log plot demon-strates a nearly perfect inverse relationship between the mean-squared dissipated work and transition time (slope of best fit= −1.07). Distributions of the accumulated work values ob-tained for 80 ps and 640 ps paths are shown in Figure 7 todemonstrate the reduction in work fluctuations obtained forlonger paths.
V. CONCLUSIONS
Previously, we developed a hybrid explicit/implicit sol-vent model capable of reducing the number of explicitmolecules needed to reproduce solvation effects while remov-ing spurious boundary interactions common to such finite do-main treatments.1 Here, we have extended this model to in-
clude an adaptive explicit domain that changes size through-out the course of a simulation in order to include an optimallevel of detail for any particular state of the system.
This implementation requires (1) an accurate continuumsolvent model with parameters that are transferable to an ex-plicit domain of any size, and (2) an efficient moveset thatpropagates the boundary as a new coordinate of the system.As the results demonstrate, we have been successful in devel-oping a continuum solvent model that accurately transitionsbetween differently sized explicit domains so that the systemis invariant to any such change. With this model in place, theboundary of our system is coupled to the solute configurationand propagated using Monte Carlo moves biased by nonequi-librium paths.
We have quantified the dissipated work that is accumu-lated along these nonequilibrium transitions over a range ofsimulation conditions and parameters. The dissipation pro-vides a reliable measure with which to optimize the transi-tions used for our adaptive boundaries. While the presentedwork uses nonequilibrium transitions on the order of tens ofpicoseconds, we anticipate implementing moves with smallerchanges in domain size and thus significantly shorter tran-sition times. Our forthcoming work applies these transitionsand continuum methods to biomolecular simulations.
ACKNOWLEDGMENTS
We are very grateful to John Chodera for thoughtful dis-cussion of this work. Computer resources were provided bythe National Science Foundation (NSF) Award No. 0960306.J.A.W. was supported in part by the National Science Foun-dation Graduate Research Fellowship Program.
APPENDIX A: IMPLICIT SOLVENT MODEL
The separation of the implicit solvent model into attrac-tive and repulsive components, �w(att) and �w(rep), closelymirrors the Weeks-Chandler-Andersen (WCA) decomposi-tion of the LJ interaction, ULJ(rij) = u(rep)(rij) + u(att)(rij). TheLJ potential is
ULJ (rij ) = 4εij
[σ 12
ij
r12− σ 6
ij
r6
], (A1)
where rij is the distance between atoms i and j, εij gives theminimum value of this energy, and 21/6σ ij is the distance atwhich that minimum occurs. The WCA components are
u(rep)(rij ) ={
U (LJ)(rij ) + εij rij < 21/6σij
0 rij ≥ 21/6σij
, (A2)
u(att)(rij ) ={−εij rij < 21/6σij
U (LJ)(rij ) rij ≥ 21/6σij
. (A3)
The attractive PMF contribution, �w(att), is calculated byintegrating the attractive component of the WCA potentialover the system domain
�w(att)(ri, R) = ρ
∫�
u(att) (‖xi − y‖) hi (xi , y, R) dy, (A4)
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-12 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
where y ∈ �, ρ is the average solvent particle density andhi(xi, y, R) is the reference distribution used to describe meannormalized solvent density surrounding atom i at position xi.The distribution function is
hi (xi , y, R) = (1 − λ (‖y‖, R)) H (‖y − xi‖ − σi) , (A5)
where λ(ri, R) is the decoupling parameter given by Eq. (16),H is the Heaviside function, and σ i is the radius of particle i,calculated as σi = 1
2 21/6σii + σs , with σ s as a parameterizedprobe radius.
The repulsive component of the implicit solventmodel is proportional to the atomic volume, �w(rep)(ri, R)= pvi (ri, R), where p is a parameterizable constant used torepresent the bulk solvent pressure and vi is an atomic volumecontribution. If V is the system volume, then
V (Xu, Xn, R) =∫
�
(1 −
∑i
hi (xi , y, R)
)dy
≈∑
i
∫�
(1 − hi (xi , y, R)) dy
=∑
i
vi (ri, R) . (A6)
The use of a volume rather than surface-area term is expectedto reproduce the repulsive PMF component at sub-nanometerlength scales,49–52, 63 relevant for atomic solvation forces64 orsmall atomic perturbations at the surface of our spherical hy-brid model.1
APPENDIX B: TRANSITION PROBABILITIES
This section presents the transition probabilities associ-ated with the methods that are used to propagate degrees offreedom in this work.
1. Metropolis Monte Carlo
If the coordinate transformations of nonequilibrium pathsare governed by the detailed balance condition, we can calcu-late the heat exchanged with the system at every step,29
Q(X0 → X1) =Nα∑i=0
Ni−1∑j=0
qj
i =Nα∑i=0
Ni−1∑j=0
Hi
(Xj+1
i
) − Hi
(Xj
i
).
(B1)We can also define the work corresponding to this transition,
W (X0 → X1) =Nα−1∑i=0
Hi+1(X0
i+1
) − Hi
(XNi
i
), (B2)
noting that Q(X0 → X1) + W (X0 → X1) = H1(x1) −H0(X0) and
A(X0 → X1) = min(1, exp[−βW (X0 → X1)]). (B3)
2. Andersen thermostat
The Verlet algorithm is used to deterministically updatethe system’s configuration. For degree of freedom k at step j,the Andersen thermostat will update the velocity from vk,j tov∗
k,j .57 Labeling a Gaussian random variable ξ k, j with mean 0and standard deviation 1,
v∗k,j =
{vk,j 1 − PA(k, j )
1√βmk
ξk,j PA(k, j ), (B4)
where PA(k, j) is the probability of randomly selecting a newvelocity for atom k at step j and mk is the atom’s mass. Therelative action can be summed via the contribution from all Nf
degrees of freedom,
�s(Xj
i → Xj+1i
) = −Nf∑k=0
βmk
2
(v2
k,j − v∗2k,j
). (B5)
Note that the Jacobian factor to account for the transformationbetween ξ and Cartesian space cancels in the ratio.
3. Stochastic velocity rescaling
Thermostatting via the stochastic velocity rescalingmethod58 is similar to the Berendsen thermostat with an addi-tional stochastic term that ensures proper canonical sampling.The positions and velocities are propagated using standard in-tegration methods. At step j, the kinetic energy (Ej
k ) is up-dated,
Ej∗k = E
j
k + (Eref
k − Ej
k
)�t
τ+ 2
√E
j
k Erefk
Nf τξj , (B6)
where Erefk = Nf
2βis the average kinetic energy, the parame-
ter τ defines the relaxation timescale, and ξ j is once again aGaussian random variable of mean 0 and standard deviation1. To achieve this change in kinetic energy, all velocities are
scaled by the factor
√E
j∗k
Ej
k
.
We can calculate the Gaussian random variable ξ̃j neces-sary for the reverse transition
ξ̃j = Ej
k − Ej∗k −
(Eref
k − Ej∗k
)√Nf
2√
Ej∗k Eref
k �tτ
. (B7)
Note that, in this case, we must include the Jacobian factoraccounting for the coordinate transformation from ξ (a sin-gle random variable applied to the total kinetic energy) to theCartesian space of the Nf degrees of freedom,
�s(Xj
i → Xj+1i
)= log
⎡⎣(
Ej∗k
Ej
k
)(Nf −3)/2⎤⎦−0.5ξ̃j
2 + 0.5ξ 2j .
(B8)
4. Langevin integration
The Langevin integrator of Bussi and Parrinello59
has been adopted for nonequilibrium transitions by Sivak
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03

234114-13 J. A. Wagoner and V. S. Pande J. Chem. Phys. 139, 234114 (2013)
et al.60 Beginning with the position, velocity, and force(rk,j , vk,j , fk,j ) for degree of freedom k at step j, this inte-grator proceeds as follows:60
v(k,j+1/4) = √avk,j +
√1 − a
βmk
ξ+k,j , (B9a)
v(k,j+1/2) = v(k,j+1/4) + fk,j�t
2mk
, (B9b)
r(k,j+1/2) = rk,j + �t
2v(k,j+1/2), (B9c)
Hi → Hi+1, (B9d)
r(k,j+1) = r(k,j+1/2) + �t
2v(k,j+1/2), (B9e)
v(k,j+3/4) = v(k,j+1/2) + f(k,j+1)�t
2mk
, (B9f)
v(k,j+1) = √av(k,j+3/4) +
√1 − a
βmk
ξ−(k,j+1), (B9g)
where a = exp[−�t/τ ]. This protocol relies on the two inde-pendent, randomly distributed variables ξ+
k,j and ξ−(k,j+1). We
can calculate the random variables necessary for the reversetransition
ξ̃+(k,j+1) = −
√βmk(1 − a)
av(k,j+1) + 1√
aξ−
(k,j+1), (B10)
ξ̃−k,j = −
√βmk(1 − a)
av(k,j+1/4) + 1√
aξ+k,j . (B11)
The relative action is
�s(Xj
i → Xj+1i
) =Nf∑k=0
(ξ+2k,j + ξ−2
(k,j+1) − ξ̃+2(k,j+1) − ξ̃−2
k,j
).
(B12)
1J. A. Wagoner and V. S. Pande, J. Chem. Phys. 134, 214103 (2011).2D. Beglov and B. Roux, J. Chem. Phys. 100, 9050 (1994).3W. Im, S. Berneche, and B. Roux, J. Chem. Phys. 114, 2924 (2001).4D. Beglov and B. Roux, Biopolymers 35, 171 (1995).5Y. Deng and B. Roux, J. Chem. Phys. 128, 115103 (2008).6D. Shivakumar, Y. Deng, and B. Roux, J. Chem. Theory Comput. 5, 919(2009).
7C. Brooks and M. Karplus, J. Chem. Phys. 79, 6312 (1983).8M. S. Lee, F. R. Salsbury, and M. A. Olson, J. Comput. Chem. 25, 1967(2004).
9V. Lounnas, S. K. Lüdemann, and R. C. Wade, Biophys. Chem. 78, 157(1999).
10J. Essex and W. Jorgensen, J. Comput. Chem. 16, 951 (1995).11J. A. C. Rullmann and P. T. van Duijnen, Mol. Phys. 61, 293
(1987).12A. Warshel and G. King, Chem. Phys. Lett. 121, 124 (1985).13Y. H. Li, G. Krilov, and B. J. Berne, J. Phys. Chem. B 109, 463 (2005).14P. Attard, Mol. Phys. 104, 1951 (2006).15G. Brancato, A. Di Nola, V. Barone, and A. Amadei, J. Chem. Phys. 122,
154109 (2005).16H. J. Risselada, A. E. Mark, and S. J. Marrink, J. Phys. Chem. B 112, 7438
(2008).
17S. C. L. Kamerlin, M. Haranczyk, and A. Warshel, ChemPhysChem 10,1125 (2009).
18R. Delgado-Buscalioni, K. Kremer, and M. Praprotnik, J. Chem. Phys. 128,114110 (2008).
19M. Praprotnik, L. Delle Site, and K. Kremer, J. Chem. Phys. 123, 224106(2005).
20M. Praprotnik, L. Delle Site, and K. Kremer, Phys. Rev. E 73, 066701(2006).
21M. Praprotnik, S. Matysiak, L. D. Site, K. Kremer, and C. Clementi, J.Phys.: Condens. Matter 19, 292201 (2007).
22R. Delgado-Buscalioni, K. Kremer, and M. Praprotnik, J. Chem. Phys. 131,244107 (2009).
23S. Poblete, M. Praprotnik, K. Kremer, and L. Delle Site, J. Chem. Phys.132, 114101 (2010).
24S. Fritsch, C. Junghans, and K. Kremer, J. Chem. Theory Comput. 8, 398(2012).
25S. J. Marrink, H. J. Risselada, S. Yefimov, D. P. Tieleman, and A. H.de Vries, J. Phys. Chem. B 111, 7812 (2007).
26S. J. Marrink, A. H. de Vries, T. A. Harroun, J. Katsaras, and S. R. Wassall,J. Am. Chem. Soc. 130, 10 (2008).
27C. Jarzynski, Phys. Rev. Lett. 78, 2690 (1997).28C. Jarzynski, Phys. Rev. E 56, 5018 (1997).29G. E. Crooks, J. Stat. Phys. 90, 1481 (1998).30G. E. Crooks, Phys. Rev. E 60, 2721 (1999).31G. E. Crooks, Phys. Rev. E 61, 2361 (2000).32D. a. Hendrix and C. Jarzynski, J. Chem. Phys. 114, 5974 (2001).33J. Horowitz and C. Jarzynski, J. Stat. Mech.: Theory Exp. (2007), P11002.34C. Jarzynski, Proc. Natl. Acad. Sci. U.S.A. 98, 3636 (2001).35C. Jarzynski, J. Stat. Mech.: Theory Exp. (2004), P09005.36C. Jarzynski, Eur. Phys. J. B 64, 331 (2008).37G. Hummer and A. Szabo, Proc. Natl. Acad. Sci. U.S.A. 98, 3658 (2001).38S. Park, F. Khalili-Araghi, E. Tajkhorshid, and K. Schulten, J. Chem. Phys.
119, 3559 (2003).39H. A. Stern, J. Chem. Phys. 126, 164112 (2007).40M. Athènes, Phys. Rev. E 66, 046705 (2002).41S. Brown and T. Head-Gordon, J. Comput. Chem. 24, 68 (2003).42A. J. Ballard and C. Jarzynski, Proc. Natl. Acad. Sci. U.S.A. 106, 12224
(2009).43R. M. Dirks, H. Xu, and D. E. Shaw, J. Chem. Theory Comput. 8, 162
(2012).44J. P. Nilmeier, G. E. Crooks, D. D. L. Minh, and J. D. Chodera, Proc. Natl.
Acad. Sci. U.S.A. 108, E1009 (2011).45H. J. Woo, A. R. Dinner, and B. Roux, J. Chem. Phys. 121, 6392 (2004).46B. Roux and T. Simonson, Biophys. Chem. 78, 1 (1999).47T. C. Beutler, A. E. Mark, R. C. V. Schaik, P. R. Gerber, and W. F. V.
Gunsteren, Chem. Phys. Lett. 222, 529 (1994).48G. Graziano, J. Phys. Chem. B 109, 12160 (2005).49G. Graziano, J. Phys. Chem. B 110, 11421 (2006).50K. Lum, D. Chandler, and J. D. Weeks, J. Phys. Chem. B 103, 4570 (1999).51D. M. Huang and D. Chandler, Proc. Natl. Acad. Sci. U.S.A. 97, 8324
(2000).52D. M. Huang, P. L. Geissler, and D. Chandler, J. Phys. Chem. B 105, 6704
(2001).53D. M. Huang and D. Chandler, J. Phys. Chem. B 106, 2047 (2002).54J. A. Wagoner and V. S. Pande, J. Chem. Phys. 137, 214105 (2012).55D. A. Sivak and G. E. Crooks, Phys. Rev. Lett. 108, 190602 (2012).56H. J. C. Berendsen, D. van der Spoel, and R. van Drunen, Comput. Phys.
Commun. 91, 43 (1995).57H. C. Andersen, J. Chem. Phys. 72, 2384 (1980).58G. Bussi, D. Donadio, and M. Parrinello, J. Chem. Phys. 126, 014101
(2007).59G. Bussi and M. Parrinello, Phys. Rev. E 75, 056707 (2007).60D. A. Sivak, J. D. Chodera, and G. E. Crooks, Phys. Rev. X 3, 011007
(2013).61M. R. Shirts, D. L. Mobley, J. D. Chodera, and V. S. Pande, J. Phys. Chem.
B 111, 13052 (2007).62See supplementary material at http://dx.doi.org/10.1063/1.4848655 for a
description of our parameterization of the PMF contribution from sphericalcavity formation, wcav(R).
63D. Chandler, Nature (London) 417, 491 (2002).64J. A. Wagoner and N. A. Baker, Proc. Natl. Acad. Sci. U.S.A. 103, 8331
(2006).
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
199.87.82.138 On: Wed, 15 Jan 2014 21:55:03