Cytoskeleton changes and impaired motility of monocytes at modelled low gravity

Rock Mech Rock Engng (2008) 41: 869–892
DOI 10.1007/s00603-008-0166-y
Printed in The Netherlands
Experimental and modelled mechanical behaviourof a rock fracture under normal stress
By
A. Marache1, J. Riss1, S. Gentier2
1 Universit�ee Bordeaux 1, GHYMAC, Av. des Facult�ees, Talence Cedex, France2 BRGM, Orl�eeans Cedex, France
Received June 27 2007; Accepted January 11 2008; Published online April 3 2008# Springer-Verlag 2008
Summary
The mechanical and hydromechanical behaviour of isolated rock joints is of prime impor-tance for a correct understanding of the behaviour of jointed rock masses. This paper focuseson the mechanical behaviour of a fracture under normal stress (fracture closure), usingapproaches based on both experimentation and modelled analysis. Experimental closure testswere carried out by positioning four displacement transducers around a fracture, leading toresults which tended to vary as a function of transducer location. Such variations can beexplained by the non-constant void space distribution between both walls of the fracture. Thepresent study focuses on the importance of transducer location in such a test, and on thesignificant role played, in terms of mechanical response, by the morphology of the fracturesurfaces.
An analytical mechanical model is then developed, which takes into account the defor-mation of surface asperities and of the bulk material surrounding the fracture; it also includesthe effects of mechanical interaction between contact points. The model is validated bysimulating the behaviour which is very similar to experimental observations. Various paramet-ric studies (scale effect, spatial distribution of contact points) are then carried out. The studyof scale effects reveals a decrease in the normal stiffness with increasing fracture size. Finally,analysis of the role of various mechanical parameters has shown that the most influentialof these is Young’s modulus corresponding to the bulk material surrounding the joint. Manyapplications, such as geothermal fluid recovery from fractures, could benefit from theseresults.
Keywords: Fracture, mechanical behaviour, normal stress, experimental device, roughness,analytical model, parametric study
Correspondence: Antoine Marache, Universit�ee Bordeaux 1, GHYMAC, Av. des Facult�ees, 33405 TalenceCedex, Francee-mail: [email protected]

1. Introduction
In order to understand the mechanical and hydromechanical behaviour of fractured
rock masses, it is essential to study single fractures. Numerous applications could
benefit from the study of fractures at small scale. Some examples are geothermy, the
study of petroleum reservoirs and all other types of energy recovery. Furthermore, the
outcome of this study could be used to determine parameters needed by numerical
codes, such as used in various civil engineering applications, or for the determination
of rock mass stability.
The present paper focuses on the mechanical behaviour of a rock joint under
normal stress. This is the first step in the direction of a more global hydromechanical
study of single fractures (normal and shear behaviour). Fractures (or joints) can be
thought of as two rough surfaces in partial contact with one another, characterised by a
void space between opposite walls of the fracture. When the normal stress is in-
creased, progressive closure of the rock joint is observed, together with an increase
in contact area between both walls. This evolution plays a key role in the development
of flow paths through the fracture.
Our study is presented in two parts: the experimental approach, and the numeri-
cally modelled approach. In the first, the importance of the position of the displace-
ment transducer on the fracture is emphasised and illustrated using mechanical results.
In the second part of the paper, following a brief appraisal of relevant models found in
the literature, our model is presented. It is validated by comparing simulated results
with the experimental results found in the first part of the study. Lastly, various
applications of the model are described, such as the study of scale effects, the deter-
mination of fracture contact zones during a test, and the influence of mechanical
parameter variations on the test results.
2. Experimental study of the mechanical behaviour of a rock
fracture under normal stress
The fracture studied in this paper is located in mortar replicas of a granitic sample
(diameter 90 mm); such replicas were used because many shear tests needed to be
performed under various conditions, and this approach enabled the same fracture
surface morphology to be respected for each test. The replicas have a Young’s modu-
lus of 31 GPa, a Poisson’s ratio equal to 0.19 and a compressive strength of 75 MPa;
44% of the grains have a size ranging from 0.4 mm to 1.0 mm, and 28% are larger than
1 mm. In the following, the experimental procedures are presented, followed by de-
tailed analysis of the results.
2.1 Experimental procedures
The mechanical test used to study the behaviour of a rock fracture under normal stress
is normally performed with a uniaxial apparatus: a normal force is applied to the free
surface of the upper wall of the fracture which closes at a constant velocity. It should
be noted that the upper wall can move only in the vertical direction, and that all
870 A. Marache et al.

possible rotations of the free surface are inhibited by the test apparatus. Before
initiating the test, particular attention should be paid to two details: the transducer
position and the design of the load-unload cycles, in order to ensure that good match-
ing is achieved at both walls of the fracture.
2.1.1 Transducer position
The experimental device used by Flamand (2000) to perform mechanical tests com-
prises one force transducer and four displacement transducers (LVDT) located around
the fracture (Fig. 1). The h value (Fig. 1) is chosen to be as small as possible so that
the measurement is influenced predominantly by closure of the fracture, rather than by
deformations of the surrounding rock; here, the value of h is 26 mm. Nevertheless, the
influence of rock deformations is corrected, with the corrected closure �V of the
fracture being given by:
�V ¼ �Vmeasured ��N � h
Eð1Þ
where �Vmeasured is the measured displacement, E is Young’s modulus for the sample,
�N is the applied normal stress and h is the vertical distance (26 mm) separating the
two transducers.
2.1.2 Load-unload cycles before the test
The closure test of a fracture can be performed only if its two walls are matched
in-situ; this is why several load-unload cycles are needed before beginning the test.
Without this preliminary step, the test would be carried out under conditions of
matching fracture walls, but not of fracture deformations. Accurate experimental
procedures were described by Gentier (1986) in order to achieve such optimal
matching (Fig. 2). Several ‘‘sub-tests’’ are performed as follows: following applica-
tion of a pre-load (defined as the stress required to obtain initial closure of the
fracture with a small normal stiffness), three load-unload cycles are carried out with
Fig. 1. Position of displacement transducers (lateral and aerial views)
Mechanical behaviour of a rock fracture 871

the maximum normal stress being increased at each cycle, up to a level of 20 MPa
for the last cycle (between each cycle, the sample is unloaded down to the pre-load
stress); the pre-load is unloaded after the last cycle. After completion of one such
‘‘sub-test’’, irreversible residual closure of the fracture can be observed; this irre-
versible residual closure decreases as the number of ‘‘sub-tests’’ increases. When the
irreversible residual closure approaches zero, optimal matching of the walls has been
achieved; the sample’s behaviour then becomes reversible, characterised by hyster-
esis. In general, three sub-tests were needed for our samples to be optimally
matched.
Experimental results are presented in the next section; these are obtained from one
test performed according to the procedures described above (using 3 preliminary
‘‘sub-tests’’ before the true test) on a mortar replica of the granitic sample.
Fig. 2. Experimental procedure to obtain optimal matching of both walls
872 A. Marache et al.

2.2 Experimental results
2.2.1 Global results
The four normal curves plotted in Fig. 3 (normal stress as a function of fracture
closure) correspond to the recordings of the four displacement transducers, with the
dashed line showing the average of the four transducer values.
These curves can be separated into two components: below and above 1 MPa,
which is the normal stress value used for pre-loading, as described in the previ-
ous section. This value was common to all transducers. The initial closure was
equal to 0.070 mm for transducers 1 to 3, and 0.095 mm for transducer 4. Beyond
this pre-load value, the same behaviour was observed for all the transducers,
with the same normal stiffness value (slope of the curve, 250 MPa=mm) for a
given normal stress. The recorded behaviour is thus the same for all the transdu-
cers, with a horizontal translation along the x-axis corresponding to a different
initial closure value for each transducer. The main conclusion is that initial closure
occurs more or less quickly, depending on which zone of the fracture is being
considered.
It can be seen obvious that the pre-load and normal stiffness values of the mean
curve are the same as those corresponding to each separate transducer. However,
although the initial mean closure is 0.075 mm, as seen previously this value varies
between transducers. If a single value is needed for this parameter, great care should
be taken because of the range observed between measuring points. The reasons for this
behaviour are provided in the following section.
Fig. 3. Measured normal stress as a function of fracture closure: trends for four different transducers, andmean curve
Mechanical behaviour of a rock fracture 873

2.2.2 Explanation of differences between transducer measurements
With the deformation test of a rock fracture under normal stress conditions, leading to
closure of the void space, differences between measured values are due only to
variations in the morphology of the fracture surfaces. Because rotations of the upper
wall are inhibited, changes detected can only be explained by variations in the frac-
ture’s void height. Figure 4 shows a map of the cast mortar void space replica (Gentier
and Hopkins, 1997) and of the transducer locations; on this map, the lightest zones
correspond to largest voids (white zones represent a void of more than 0.20 mm).
It can be seen that the left side of the void space shows, on average, larger voids
than the right side; the greatest void heights are located near to transducer 4. In this
zone, greater vertical displacements are needed to achieve initial closure of the frac-
ture. Nevertheless, once this closure is reached, the same behaviour is recorded by all
the transducers.
Analysis of the data recorded during the described experiment has enabled classi-
cal fracture closure behaviour to be studied. One of the main conclusions of this study
is the importance of choosing the correct type of device for the test, and the significant
role of transducer location. These considerations are essential for correct modelling of
fracture closure phenomena under normal stress.
3. Modeling the mechanical behaviour of a rock fracture under normal stress
3.1 Bibliographical review
Many models have been developed to describe the mechanical behaviour of a rock
fracture under normal stress. These can be classified into three categories: empirical,
analytical and numerical models.
In the first of these, the model relies on the fitting of a non-linear mathematical
function (hyperbolic or logarithm for example) to an experimental curve. Input param-
Fig. 4. Void space map with transducer locations
874 A. Marache et al.

eters vary as a function of the model: some models use the elasticity modulus (Shehata,
1971), the material constant (Goodman, 1976; Detournay, 1979; Bandis, 1980) or the
initial value of fracture closure (pre-load) (Goodman, 1976; Detournay, 1979). Only the
model of Brown and Scholz (1986) takes morphological characteristics into account. All
of these models rely on fits to experimental curves, but do not allow a mechanical
behaviour to be predicted. Furthermore, Bandis et al. (1983) established a relationship
between the JRC (Joint Roughness Coefficient) roughness parameter and mechanical
parameters such as maximum closure of the fracture, or normal stiffness. Nevertheless,
such a model makes use of parameters which can be obtained from experimental data
only. Because of the non-predictive nature of such models, other methods are needed.
A second class of models (analytical) was used in order to explicitly take into
account the morphology of the fracture surfaces: these models were designed to take
into account the stress-strain relationship between two rough, contacting surfaces.
Many models of this type require the fracture surface to be discretised into zones
characterised by asperities of varying height with respect to a reference plane. A given
asperity is characterised by its form, its height, its width and the height of the void
between it and the opposite surface. Models of this class are based on the principle of
computing the individual stresses applied when local asperities come into contact, in
order to compute the total stress on the fracture.
Of the various models of this type, it is of interest to note that developed by Tsang
and Witherspoon (1981), who proposed coupling a void deformation model (defor-
mation of an elliptic void, as described by Walsh, 1965) and the asperity deformation
model of Gangi (1978), which describes the contact between a smooth and a rough
surface. The drawback of this model is its reliance on empirical parameters; other
types of model, which do not rely on the use of such parameters, have been developed
in order to predict a fracture’s mechanical behaviour.
Another approach is to use Hertz’s (1882) equations, which describe the elastic
deformation of two contacting spheres. Historically, these were the first models which
required only the mechanical characteristics of the material and the morphology of the
fracture’s surfaces. The application of these models to rough surfaces is explained in
detail by Gentier (1986), who uses studies of the behaviour of steel developed by
Greenwood and Williamson (1966), and Greenwood and Tripp (1971). It has been
shown that for low and medium stress levels the predicted fracture closure is greater
than that measured experimentally, and that for high stress levels the normal stiffness
and the contact area between both walls are underestimated. Of the many other
authors who have used this approach, it is of interest to note the papers of Swan
(1983), Matsuki et al. (2001) and Lanaro (2001), where a model is proposed that takes
into account plasticity and the unloaded phase of the fracture.
When a normal test is performed, no damage is noted on the fracture surfaces.
Nevertheless, when the true stress acting on each contacting asperity (rather than on
the whole fracture) is calculated, the values obtained are found to be much greater than
the rock compression strength. Only asperity confinement can explain these observa-
tions. This interpretation has been included in Gentier’s (1986) model, which is
derived from that of Billaux and Feuga (1984). When this approach is compared with
previous models, the main difference observed is an improved agreement between
theoretical and experimental curves, for high levels of normal stress.
Mechanical behaviour of a rock fracture 875

Another model is based on joint deformation analysis, which takes into account
both asperity deformations and deformations of the rock surrounding the asperities.
Two main classes of models respect this approach: those due to Cook (1992) based on
Hertz’s theory and on the superposition principle in linear elasticity respectively
(Timoshenko and Goodier, 1970) (the displacement of a zone is given by the sum of
all contributing elementary displacements); the latter approach was used by Hopkins
(1990) (it forms the basis of the model used in the present study, cf. Section 3.2), and
by Pyrak-Nolte and Morris (2000), Lee and Harrison (2001), Borri-Brunetto et al.
(1998, 2001) and Capasso (2000).
Finally, the last category of models includes all those based on a numerical approach,
as for example is the case of the distinct element method. A comparison of various
numerical methods used for rock mass modelling can be found in Davias (1997).
3.2 Presentation of the model developed for the present study
The model presented in the following is based on the joint deformation approach and
was initially developed by Hopkins (1990, 2000), and later improved by Marache
(2002). We present the method used to represent the fracture, and then describe how
the computations are implemented. Improvements with respect to the initial model
include the possibility of modelling greater fracture sizes, and the inclusion of total-
force boundary conditions.
The model relies on an accurate description of the topography of the fracture walls
and of the void space. A geostatistical methodology was developed in order to obtain
topographical maps of the fracture surfaces from profile data (Marache et al., 2002).
Fractures are modelled as the interface between two elastic half spaces. The surface
roughness of the interface walls is modelled by discretizing the surface topography
maps into a grid of elements. Each element thus represents an asperity on the elastic
half space. In order to correctly evaluate the normal stress levels, asperities are rep-
resented by cylinders of radius R, with the height H of each cylinder being determined
from the void space map (Fig. 5). In addition, the material’s mechanical properties, i.e.
Young’s modulus (E) and Poisson’s ratio (�), are required. Different material proper-
ties can be assigned to each of the two half spaces and to each of the asperity subsets.
This is important for cases in which surface asperities are likely to be weaker than the
Fig. 5. Modelling of joint surfaces
876 A. Marache et al.

surrounding rock because of geologic processes; as an example, fluid flow through
fractures can alter the surfaces it encounters.
Fractures can be thought of as two rough surfaces in partial contact. The model
presented in the following is based on the computation of forces acting between both
fracture walls, at each contact zone, for a specified applied normal load. One of our
main objectives was to derive an analytical formulation which enables the normal
stresses acting on contact areas to be determined, for a given value of normal dis-
placement (or which enables the resulting displacements to be predicted for a specified
applied load). Because elastic behaviour is assumed under normal loading (the normal
stress applied during experimental tests was small compared to the compressive
strength of the material, and no damage occurred), we can apply the superposition
principle (Timoshenko and Goodier, 1970).
It is then possible to calculate the total displacement at each contact asperity, as the
sum of displacements arising from:
– deformation of the asperity itself due to the forces acting directly on it. For an
asperity i of radius R and height Hi, the displacement D1i due to the force F1i is
given by:
D1i ¼Hi
�R2Ea
�Fi ð2Þ
where Ea is Young’s modulus for the asperity,
– deformation of the bulk material surrounding the asperity due to the forces acting
on the asperity, leading to the displacement D2i:
D2i ¼16ð1 � �2Þ
3�2EbR�Fi ð3Þ
where � and Eb are respectively Poisson’s ratio and Young’s modulus for the bulk
material surrounding the asperity, and
– deformation of the bulk material surrounding the asperity due to the forces acting
on all other asperities in contact (deformation of the bulk material results in me-
chanical interaction between contact zones). The displacement of an asperity j due
to a force acting on asperity i is given by the following expression:
D3ij ¼
ðR2
R1
w� 2r�Arc cos
�d2 þ r2 � R2
2� d� r
�dr
�R2ð4Þ
where d is the distance between the centre of the asperity i and the centre of the
asperity j, R1 and R2 are the minimum and maximum distances between the centre of
the asperity i and the asperity j, and w is given by the expression:
w ¼ 4ð1 � �2Þr�Eb
� Fi
�R2
�AðrÞ �
�1 � R2
r2
�BðrÞ
�ð5Þ
where A(r) and B(r) are respectively the first and second order Legendre elliptical
integrals. As there is no analytical solution for Eq. (4), the problem is solved
numerically.
Mechanical behaviour of a rock fracture 877

A system of equations was derived to describe the total displacement at each
contacting asperity, in terms of the normal stress acting at each point (see Eq. (6)).
The system is solved by imposing either a far-field normal displacement, or a total-
force boundary condition, and by searching for the distribution of stresses which
minimizes the strain energy in the system. The code was developed in Fortran 5,
and the required computing time depends essentially on the number of contact asperi-
ties, and can vary from a few seconds to several minutes.
�V1
�V2
..
.
�Vi
..
.
�Vn
266666664
377777775¼
C11 C12 � � � C1i � � � C1n
C12 C22
..
. . ..
Cij
C1i Cii
..
.Cij
. ..
C1n Cnn
266666664
377777775
F1
F2
..
.
Fi
..
.
Fn
266666664
377777775
ð6Þ
where n is the number of contact asperities.
The model can be used to generate both global results, which can be compared
with data from laboratory experiments, and local results which are useful in under-
standing the micromechanical behaviour. For example, at the global level, the normal
stiffness can be calculated by determining total loads and displacements; the strain
energy can also be calculated for any stress state. Locally, contact areas can be es-
timated, along with the normal force acting at each contact point.
Following the above presentation of our model, we show that it is well validated,
by comparing predicted behaviours with experimental observations.
3.3 Validation of the model
The validation of our model is presented in two parts. Firstly, we present global results
as if only one displacement transducer (located at the top of the fracture) had been
used in the test. In practice, we have shown that the number and location of displace-
ment transducers play an important role when recording the experimental behaviour of
fractures (cf. Section 2.2); for this reason the model is also validated, in a second
section, by taking the transducer positions into account.
Our simulations were validated by comparing their predictions with the results
obtained during the laboratory experiments presented in Section 2. The mortar used
has a Young’s modulus of 30,853 MPa and a Poisson’s ratio of 0.19. The discretization
step for the geometrical model of the fracture was equal to 1 mm; this choice will be
explained in detail in Section 3.4.1.a.
Figure 6 shows the modelled and experimental results; the experimental curve
corresponds to the mean output of the four sensors, whereas the modelled curve
results from a simulated test performed with only one sensor, located on the top of
the fracture (global result). One can see that the general shape of the experimental
curve is well reproduced by the model, and that both curves are well fitted up to a
vertical displacement of 0.09 mm; beyond this value the model underestimates the
normal stiffness. The divergence between the two curves is due to the fact that the
experimental conditions, i.e. the position and the number of transducers, are not well
878 A. Marache et al.

represented by the model. If it is assumed that each sensor integrates the effects of
fracture closure over a restricted part of the whole fracture surface, it can be useful
to determine which portion of the fracture is accounted for by each of the four
transducers.
It was seen in Section 2.2 that each transducer provides different results; it is thus
important to determine which part of the fracture influences the signals recorded by
each one of them. In order to model each of these zones of influence, only limited
sections of the fracture are represented in the model; these are bounded by an arc of
radius Ri, centred on the studied transducer (Fig. 7). An optimal value of R can thus be
found, for which the simulated results come closest to the experimental ones. Figure 8
shows the results of simulations for various values of R, in the case of transducer 2.
When the value of R increases, with the displacement remaining constant, a decrease
Fig. 6. Experimental and modelled results
Fig. 7. Sectorial representation of the spatial range of zones relevant to each transducer (transducer 2 in thisexample)
Mechanical behaviour of a rock fracture 879

in normal stress is observed for all measurement points and the different curves tend to
merge; these observations are commented in greater detail in Section 3.4.1, which
deals with the scale effect study.
An optimal radius can thus be determined for each measuring point, such that
simulated and experimental curves have the best match (normal stiffness comparison).
However, this optimal value is not the same for each transducer (see Table 1). An
example is given in Fig. 9 for measurement point 2. It can be noticed that with this
approach, the simulation is carried out for each transducer as if it were associated with
an isolated fracture, limited by the perimeter of the fracture and the chosen radius R;
interactions between zones inside and outside the perimeter are thus removed in this
model (because the whole fracture is not taken into account), whereas from an experi-
mental point of view they are known to exist. As a consequence, for a given displace-
ment, the model predicts stresses slightly higher than those measured experimentally.
Because the model is validated independently for each measuring point, the aver-
age of the four simulated curves can be determined, exactly as was done for the
experimental results (Fig. 3); this result is presented in Fig. 10. It can be seen that
the two curves are very similar (more so than in Fig. 6). It is thus important to take the
characteristics and position of each transducer into account.
Fig. 8. Influence of the measurement zone for transducer 2
Table 1. Optimal radius determined for each transducer
Transducer Optimal radius (mm)
1 45.02 47.53 37.54 50.0
880 A. Marache et al.

With the model correctly validated, the purpose of this paper is to predict fracture
behaviour in various applications, as described in the following section.
3.4 Application of the model
The results obtained with the model for scale effect applications are presented in the
following together with a study of the contact zones between both walls of the fracture
Fig. 9. Validation of the model for transducer 2 (R¼ 47.5 mm)
Fig. 10. Mean of the experimental and simulated results from the four transducers
Mechanical behaviour of a rock fracture 881
during normal closure. Finally, a parametric study of the relevant mechanical param-
eters is discussed.
3.4.1 Resolution of the model and scale effects
Scale effects in the mechanical behaviour of single fractures under normal stress can
be studied using two different approaches: one can either vary the size of the mesh
interval used to produce a discretised representation of the fracture surfaces, or vary
the fracture size in the model.
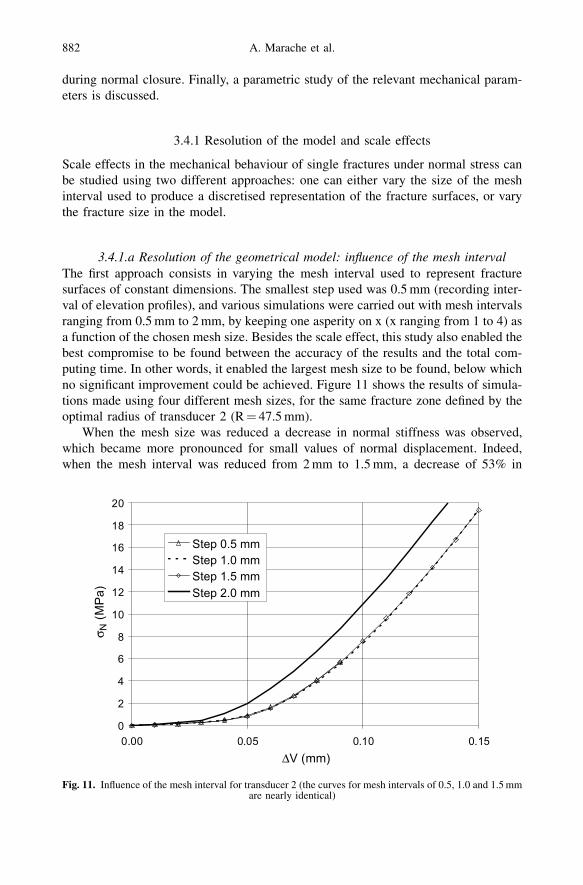
3.4.1.a Resolution of the geometrical model: influence of the mesh interval
The first approach consists in varying the mesh interval used to represent fracture
surfaces of constant dimensions. The smallest step used was 0.5 mm (recording inter-
val of elevation profiles), and various simulations were carried out with mesh intervals
ranging from 0.5 mm to 2 mm, by keeping one asperity on x (x ranging from 1 to 4) as
a function of the chosen mesh size. Besides the scale effect, this study also enabled the
best compromise to be found between the accuracy of the results and the total com-
puting time. In other words, it enabled the largest mesh size to be found, below which
no significant improvement could be achieved. Figure 11 shows the results of simula-
tions made using four different mesh sizes, for the same fracture zone defined by the
optimal radius of transducer 2 (R¼ 47.5 mm).
When the mesh size was reduced a decrease in normal stiffness was observed,
which became more pronounced for small values of normal displacement. Indeed,
when the mesh interval was reduced from 2 mm to 1.5 mm, a decrease of 53% in
Fig. 11. Influence of the mesh interval for transducer 2 (the curves for mesh intervals of 0.5, 1.0 and 1.5 mmare nearly identical)
882 A. Marache et al.

normal stiffness was determined, for a normal displacement of 0.05 mm. A 9% de-
crease in normal stiffness was observed in the case of a normal displacement of
0.14 mm. Furthermore, there was almost no further change when the mesh size was
reduced below 1.5 mm.
These observations can be explained by studying the proportion of contact area
between both walls. Figure 12 shows the contact zones, for a vertical displacement of
0.1 mm and two different mesh sizes. The location of these contact zones is an output
provided by the model. When the mesh size decreases the contact area also decreases,
but the contacting asperities become more numerous. Because the model takes inter-
action between asperities into account (cf. Section 3.2), a larger number of asperities
leads to a smaller value of normal stiffness. Furthermore, it is known from previous
studies (Marache, 2002) that greater mesh sizes lead to smoother representations of
the fracture surfaces, and thus to thinner void spaces. This tendency leads to an
increase in normal stiffness when the mesh size is increased.
As a result of various comparisons, a mesh size of 1 mm was chosen for all of the
simulations: this size was found to provide the best compromise between computing
time and the accuracy of results. All of the results presented in the following are
derived from simulations using this mesh interval. Another approach which could be
used to study the scale effect would be to vary the fracture size, whilst setting the mesh
interval to a constant value of 1 mm.
3.4.1.b Influence of the fracture size
Variations in fracture size were implemented by increasing the fracture radius, by
5 mm increments, from 5 mm to 45 mm. Figures 13 and 14 show respectively the
fracture closure curves, and the void height distributions, for each value of fracture
radius. To perform these calculations, an isolated fracture was considered for each
Fig. 12. Contact zones for a vertical displacement of 0.1 mm (transducer 2)
Mechanical behaviour of a rock fracture 883

radius value, such that the same asperity could be assigned slightly different height
values, depending on the chosen value of fracture radius.
Figure 13 shows that when the radius is increased the normal stiffness (given by the
slope of the curve) decreases for a given normal displacement; Fig. 14 illustrates that the
void height distribution has a smaller range (except for the 5 mm curve) with higher
aperture values. The curve corresponding to a radius of 5 mm is different from the others
Fig. 13. Fracture closure simulations for various fracture radii
Fig. 14. Void height distributions for various fracture radii
884 A. Marache et al.
because the morphology of this studied zone has been totally interpolated by kriging;
indeed, as we can see on Fig. 4, a hole was present in the fracture for the purpose of
hydraulic tests. The differences between the curves decrease with increasing radius; this
observation emphasizes the well-known problem of the scale effect between laboratory
and in-situ conditions: a fracture too small in size will lead to an overestimation of the
normal stiffness and to an underestimation of the fracture aperture. Nevertheless, it can
be seen in Figs.13 and 14 that the results are very similar for fracture radii greater than
or equal to 30 mm. This threshold value corresponds to the second morphological
structure identified in a prior variographical study (Marache et al., 2002) where an
accurate geostatistical study led to the analysis of roughness correlation structures, in
which two major structures were identified, equal to 15 mm and 30 mm.
In conclusion, the scale effect described above is not caused by the fracture’s
mechanical properties (because these are the same whatever its size), but rather by
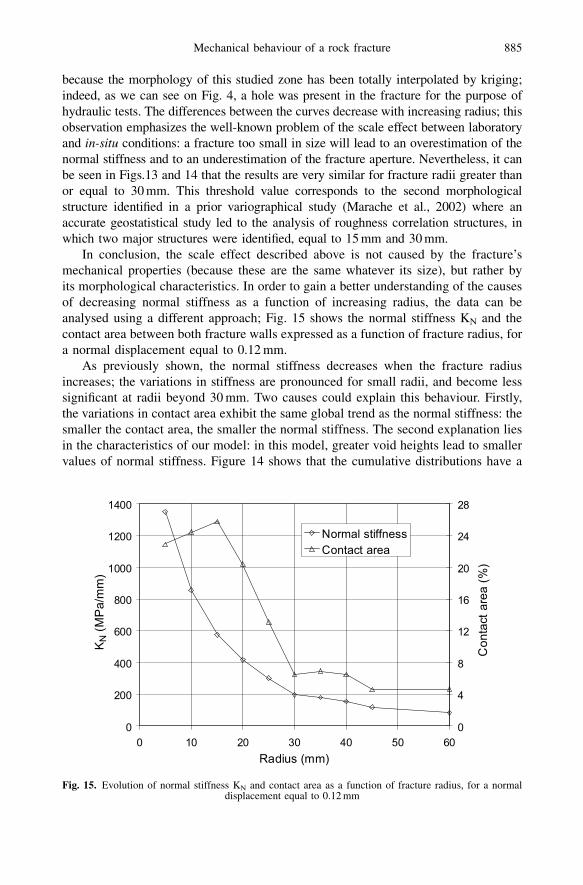
its morphological characteristics. In order to gain a better understanding of the causes
of decreasing normal stiffness as a function of increasing radius, the data can be
analysed using a different approach; Fig. 15 shows the normal stiffness KN and the
contact area between both fracture walls expressed as a function of fracture radius, for
a normal displacement equal to 0.12 mm.
As previously shown, the normal stiffness decreases when the fracture radius
increases; the variations in stiffness are pronounced for small radii, and become less
significant at radii beyond 30 mm. Two causes could explain this behaviour. Firstly,
the variations in contact area exhibit the same global trend as the normal stiffness: the
smaller the contact area, the smaller the normal stiffness. The second explanation lies
in the characteristics of our model: in this model, greater void heights lead to smaller
values of normal stiffness. Figure 14 shows that the cumulative distributions have a
Fig. 15. Evolution of normal stiffness KN and contact area as a function of fracture radius, for a normaldisplacement equal to 0.12 mm
Mechanical behaviour of a rock fracture 885

right-hand distribution tail when the fracture radius increases, which could explain the
decrease in stiffness.
Nevertheless, these two curves do not show the same evolution for radii ranging
between 5 mm and 15 mm (decrease in normal stiffness and stabilization of the contact
area). This observation emphasizes the significant role played by interactions between
asperities, which are correctly taken into account in our model (see Section 3.2): for
the same value of contact area, the position of the contact areas on the fracture plays
an important role in the normal stiffness (Hopkins, 1990). In the present case, the
contact areas are considerably more dispersed when the radius is equal to 5 mm than
when it reaches a value of 15 mm.
The spatial location of contact areas thus plays an important role in the mechanical
response of the fracture, and in the determination of possible channels for the flow of
fluids. In the following we present detailed results of the spatial and quantitative
evolution of contact zones during closure of a fracture.
3.4.2 Spatial and quantitative evolution of contact zones as a function
of normal stress
During fracture closure, the total normal stress is distributed over contact areas be-
tween both walls of the fracture. In preparation for future studies of fluid flow through
fractures, it is important to analyze the evolution of these contact areas when the
normal stress increases. Figures 16 and 17 illustrate the evolution of contact areas,
respectively as a function of fracture closure and of applied normal stress.
In Fig. 16, a small increase in contact area can be observed in response to small
levels of fracture closure, followed by a greater rate of change beyond 0.07 mm of
vertical displacement. The latter value corresponds to the initial fracture closure
Fig. 16. Contact area as a function of fracture closure
886 A. Marache et al.

identified in Section 2.2.1. As opposed to this non-linear response, the contact area
increases linearly as a function of normal stress (Fig. 17), as was previously observed
by Borri-Brunetto et al. (1998). Other authors have shown in various ways that, with
such results, a fast initial increase of contact area is observed in response to normal
stress, followed by a slower rate of change and finally an asymptotic behaviour for
high levels of normal stress (Gentier, 1986; Re and Scavia, 1999; Flamand, 2000). It
should be noticed that in the present case the normal stress levels reached are small
compared to those presented in the papers of many other authors, such that our results
are relevant only to the first part of the normal stress range.
Having quantified the evolution of contact areas during fracture closure, the
spatial distribution of these contacts over the fracture surface can now be studied
for four levels of normal stress (Fig. 18). This figure reveals a very heterogeneous
distribution of contact zones over the fracture, with a very dense zone around sensor
2 for the greatest normal stress values. This result is in total agreement with
the mechanical results and void height distribution presented in Section 2.2, in which
the smallest apertures are located around sensor 2. If the local stress applied in the
contact zones is observed, it is found to reach values significantly greater than the
compressive strength of the material (75 MPa), without damage to the fracture sur-
faces; this result points to the existence of asperity confinement. Furthermore, it is
found that the local stress is higher on isolated asperities than on asperities belonging
to a cluster, because the model takes into account the inter-asperity interaction phe-
nomenon. Finally, when the normal stress increases, the extension of pre-existing
zones is observed (see the surrounded area), rather than the creation of new contact
zones.
The last application of the model involved the study of the influence of variations
in mechanical parameters on fracture closure behaviour.
Fig. 17. Contact area as a function of applied normal stress
Mechanical behaviour of a rock fracture 887

3.4.3 Parametric study of mechanical parameters
The developed model allows parametrical studies to be carried out, by varying me-
chanical input parameters (Young’s modulus and Poisson’s ratio). Furthermore, be-
cause the model takes asperities and the bulk material surrounding the asperities into
account, different values can be assigned to the mechanical parameters of asperities
and bulk material. In practice, for geological reasons, the asperities which are in direct
contact with air or fluids can indeed be weakened and have poorer mechanical char-
acteristics than neighbouring portions of intact rock.
3.4.3.a Young’s modulus
The influence of variations in Young’s modulus can be studied by assigning the same
value to asperities and bulk material. Because the model is based on the principle of
superposition in linear elasticity, the normal stiffness for a given value of fracture
Fig. 18. Contact zone localisations for four normal displacement values (the spot size is proportional to theapplied local stress, which ranges from 0 MPa to 933 MPa)
888 A. Marache et al.

closure is directly proportional to Young’s modulus. As an example, for a normal
displacement of 0.14 mm and a Poisson’s ratio equal to 0.19, the normal stiffness is
equal to 0.0085 times=mm Young’s modulus. This linear relationship implies that the
contact area between both walls corresponding to a constant fracture closure is the
same, whatever the value of Young’s modulus. This can easily be checked, by analys-
ing the spatial distribution of contact surfaces over the fracture after running the
simulation.
Secondly, the value of Young’s modulus can be different for the asperities and for
the bulk material, as previously explained. Figure 19 shows the results obtained for
simulations using three different values of Young’s modulus for the asperities, and a
constant setting for Young’s modulus for the bulk material (30,000 MPa) and Poisson’s
ratio (0.19). The results are presented for the portion of the fracture which corresponds
to the measurement zone of sensor 2.
It can be clearly seen that an increase in Young’s modulus leads to an increase in
normal stiffness. However, this tendency is clearly weaker than in the previous case.
Furthermore, the previously observed linear relationship between both parameters is not
present here; for example, for a vertical displacement equal to 0.14 mm, the results show
a 5% increase in normal stiffness when Young’s modulus varies from 10,000 MPa to
20,000 MPa, as opposed to a 1% change when it varies from 20,000 MPa to 30,000 MPa.
It can thus be concluded that increases in normal stiffness related to changes in
Young’s modulus are due mainly to variations in Young’s modulus of the bulk mate-
rial, and not to that of asperities. This result also confirms the conclusions of Hopkins
(1990) and Capasso (2000), who showed that fracture deformation is mainly due to
deformations of the bulk material, rather than to that of the asperities. This conclusion
becomes even more valid when the largest fracture opening is small (Marache, 2002);
Fig. 19. Influence of variations in Young’s modulus for asperities only (transducer 2, Eintact rock¼30,000 MPa, �¼ 0.19)
Mechanical behaviour of a rock fracture 889

in cases where the asperities are relatively high (leading to high aperture values), the
relative contribution of asperity deformations becomes more significant.
3.4.3.b Poisson’s ratio
The last remaining parameter which can be studied in the present context is Poisson’s
ratio. Figure 20 shows fracture closure curves for three values of Poisson’s ratio (the
same value is taken for the asperities and the bulk material); Young’s modulus is set to
30,853 MPa. As in the case of the previous examples, the results presented here
correspond to the portion of the fracture measured by sensor 2.
It can be seen that an increase in Poisson’s ratio leads to a slight increase in normal
stiffness for a given fracture closure, but that the influence of this parameter is
completely insignificant in comparison to that of Young’s modulus.
4. Conclusions and perspectives
A complete understanding of the mechanical behaviour of a fracture under normal
stress is of prime importance in many fields. It was shown at the beginning of this
study that it is not a straightforward task to carry out a normal fracture test under
laboratory conditions, because the choice of transducer location conditions the results:
for a given closure level, the calculated normal stiffness depends on the position of the
transducer. The main parameter influencing the mechanical results is the void height
distribution between both walls of the fracture.
Hopkins’ model (based on a joint deformation model and on the principle of
superposition in linear elasticity) has then been improved by enabling greater fracture
sizes to be modelled and by imposing total-force boundary conditions. Simulations
made with this model have allowed experimental test results to be reproduced, and
Fig. 20. Influence of variations in Poisson’s ratio (transducer 2, E¼ 30,853 MPa)
890 A. Marache et al.

have provided considerable insight into the extent of the measurement zones relevant
to each transducer.
Various parametric studies have been presented. We have shown that an increase in
fracture size leads to a decrease in normal stiffness, which in our case then stabilizes at
a fracture radius of 30 mm; this threshold value can be explained by morphological
considerations, which are enhanced by a previous geostatistical study (Marache et al.,
2002). With regard to the spatial evolution of contact zones during fracture closure, we
observed an increase of pre-existing zones rather than the creation of new contact
zones. Finally, with regard to the variation of mechanical parameters (Young’s modu-
lus and Poisson’s ratio), we have shown that Young’s modulus for the bulk material
surrounding the asperities is the most influential parameter, and that variations in
Poisson’s ratio have very little impact on normal stiffness.
Various perspectives can be envisioned with regard to the behaviour of fractures.
Firstly, our model should be extended to include the effects of shear behaviour, in
order to forecast peak and residual shear stress as a function of fracture surface
morphology (shearing direction), and under constant normal stress or constant normal
stiffness conditions. The outputs of such a model could be the predicted location of
damaged zones, or the evolution of void space during the shear process; these results
could then be compared with those obtained using other tools (Marache et al., 2003).
Void space evolution during shearing is of prime importance to hydraulic studies.
As an example, such predictions could be used to analyse fluid flow through fractures
for resource recovery problems. Secondly, although fracture surfaces are considered to
be homogeneous with regard to mechanical parameters, the majority of rocks are
polyminerals and their mechanical parameters can vary as a consequence. Because
the model is based on the definition of asperities, we could assign different mechanical
parameter values to each asperity, in order to simulate a polymineral fracture surface.
Finally, the problem of scale effects needs to be addressed by simulating a wide range
of fractures, ranging from laboratory to in-situ scales, in order to gain improved
understanding of in-situ mechanical parameters which can later be used by hydrome-
chanical numerical simulators.
References
Bandis S (1980) Experimental studies of scale effects on shear strength and deformation of rockjoints. Ph.D. Thesis, University of Leeds
Bandis SC, Lumsden AC, Barton NR (1983) Fundamentals of rock joint deformation. Int J RockMech Min Sci Geomech Abstr 20: 249–268
Billaux D, Feuga B (1982) Calcul des perm�eeabilit�ees dans un milieu fissur�ee �aa partir de l’�eetat decontraintes. Programme MECHYD, Rapport du BRGM 82 SGN 816 GEG
Borri-Brunetto M, Carpinteri A, Chiaia B (1998) Lacunarity of the contact domain betweenelastic bodies with rough boundaries. PROBAMAT-21st Century: Probabilities and Materials,pp 45–64
Borri-Brunetto M, Chiaia B, Ciavarella M (2001) Incipient sliding of rough surfaces in contact: amultiscale numerical analysis. Comput Methods Appl Mech Engrg 190: 6053–6073
Brown SR, Scholz CH (1986) Closure of rock joints. J Geoph Res 91(B5): 4939–4948Capasso G (2000) Mechanical and hydraulic behavior of a rock fracture in relation to surface
roughness. Ph.D. Thesis, Turin PolytechnicumCook NGW (1992) Natural joints in rock: mechanical, hydraulic and seismic behaviour and
properties under normal stress. Int J Rock Mech Min Sci Geomech Abstr 29(3): 198–223
Mechanical behaviour of a rock fracture 891

Davias F (1997) Mod�eelisation num�eerique d’�eecoulements en massif rocheux fractur�ee – contribu-tion �aa la mod�eelisation du comportement hydrom�eecanique des milieux fractur�ees. Ph.D. Thesis,University of Bordeaux 1
Detournay E (1979) The interaction of deformation and hydraulic conductivity in rock fracture –an experimental and analytical study. Improved stress determination procedures by hydraulicfracturing, Final Report, University of Minnesota, Minneapolis, vol. 2
Flamand R (2000) Validation d’une loi de comportement m�eecanique pour les fractures rocheusesen cisaillement. Ph.D. Thesis, Universit�ee du Qu�eebec �aa Chicoutimi
Gangi AF (1978) Variation of whole and fractured porous rock permeability with confiningpressure. Int J Rock Mech Min Sci Geomech Abstr 15: 249–257
Gentier S (1986) Morphologie et comportement hydrom�eecanique d’une fracture naturelle dans legranite sous contrainte normale – Etude exp�eerimentale et th�eeorique. Ph.D. Thesis, Universit�eed’Orl�eeans
Gentier S, Hopkins DL (1997) Mapping fracture aperture as a function of normal stress using acombination of casting, image analysis and modeling techniques. Int J Rock Mech Min Sci34(3–4): 132.e1–132.e14
Goodman RE (1976) Methods of geological engineering in discontinuous rocks. West, New YorkGreenwood JA, Tripp JH (1971) The contact of two nominally flat rough surfaces. Proc I Mech
Eng 185(48): 625–633Greenwood JA, Williamson JBP (1966) Contact of nominally flat surfaces. Proc Royal Soc
London A (295): 300–319Hertz H (1882) €UUber die Ber€uuhrung fester elastischer K€oorper. J f€uur die Reine Angewandte
Mathematic 92: 156–171Hopkins DL (1990) The effect of surface roughness on joint stiffness, aperture, and acoustic wave
propagation. Ph.D. Thesis of the University of California at Berkeley, Spec. Eng Mater SciMiner Eng
Hopkins DL (2000) The implications of joint deformation in analysing the properties andbehavior of fractured rock masses, underground excavations, and faults. Int J Rock Mech MinSci 37: 175–202
Lanaro F (2001) Geometry, mechanics and transmissivity of rock fractures. Ph.D. Thesis, RoyalInstitute of Technology Stockholm
Lee SD, Harrison JP (2001) Empirical parameters for non-linear fracture stiffness from numericalexperiments of fracture closure. Int J Rock Mech Min Sci 38: 721–727
Marache A (2002) Comportement m�eecanique d’une fracture rocheuse sous contraintes normale ettangentielle. Ph.D. Thesis, Ecole Centrale Paris
Marache A, Riss J, Gentier S, Chil�ees J-P (2002) Characterization and reconstruction of a rockfracture surface by geostatistics. Int J Numer Anal Meth Geomech 26(9): 873–896
Marache A, Riss J, Gentier S (2003) Simulation of the mechanical behavior of a fracture inshear: implication on the distribution of the void space. 10th Int. Congress Rock Mechanics,pp 803–808
Matsuki K, Wang EQ, Sakaguchi K, Okumura K (2001) Time-dependent closure of a fracturewith rough surfaces under constant normal stress. Int J Rock Mech Min Sci 38: 607–619
Pyrak-Nolte LJ, Morris JP (2000) Single fractures under normal stress: the relation betweenfracture specific stiffness and fluid flow. Int J Rock Mech Min Sci 37: 245–262
Re F, Scavia C (1999) Determination of contact areas in rock joints by X-ray computertomography. Int J Rock Mech Min Sci 36: 883–890
Shehata WM (1971) Geohydrology of Mount Vernon Canyon area. Ph.D. Thesis, ColoradoSchool of Mines
Swan G (1983) Determination of stiffness and other joint properties from roughness measure-ments. Rock Mech Rock Engng 16: 19–38
Timoshenko SP, Goodier JN (1970) Theory of elasticity. McGraw-Hill Company, New-YorkTsang YW, Witherspoon PA (1981) Hydromechanical behavior of a deformable rock fracture
subject to normal stress. J Geoph Res 86(B10): 9287–9298Walsh JB (1965) The effect of cracks on the uniaxial elastic compression of rocks. J Geoph Res
70(2): 399–411
892 A. Marache et al.: Mechanical behaviour of a rock fracture
Copyright © 2022 FDOKUMEN