Evaluation of an Adaptive Cruise Control (ACC) system used ...
12
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of Evaluation of an Adaptive Cruise Control (ACC) system used ...
Evaluation of an Adaptive CruiseControl (ACC) system used by drivers
with lower limb impairments
Paper presented at the Third Annual World
Congress on Intelligent Transport Systems,
Oct. 14-18, 1996, Orlando, Florida, USA
|U')G)_|
HooN
x0>.&-Hh
35m
Björn Peters
Swedish National Roadand'Fansport Research Instiwte
VTI särtryck 281 - 1997
Evaluation of an Adaptive CruiseControl (ACC) system used by drivers
with lower limb impairments
Paper presented at the Third Annual World
Congress on Intelligent Transport Systems,
Oct. 14-18, 1996, Orlando, Florida, USA
Björn Peters
wedisir andl?easpofr instr mte

Evaluation of an Adaptive Cruise Control (ACC) system used by
drivers with lower limb impairments
No 2104
Björn Peters
Swedish National Road and Transport Research Institute
S - 581 95 Linköping
Sweden
phone +46 13- 20 40 70
fax +46 - 13 - 1414 36
email bjorn.peters©vti.se
ABSTRACT
An advanced driving simulator equipped with an Adaptive Cruise Control (ACC) system was used to study drivingbehaviour of drivers with lower limb impairments. The ACC system could keep a constant speed selected and set bythe driver and also adapt speed in order to keep a safe distance to a leading vehicle. The purpose of the study was toinvestigate ACC driving influence on workload, comfort and driving behaviour compared to manual driving. Twentysubjects with leg impairments, all experienced drivers of converted cars, participated in the study. Two common typesof hand controls for accelerator and brakes were used for the manual driving condition. These were different both withrespect to function and position All subjects drove 100 km at two occasions, with and without the ACC systemavailable. Subjective workload was found to be lower and performance better when ACC was used. Manualspeedkeeping is a loading task and increased variation in spped could indicate increased load or tiredness. Thedifference in speed variation between manual and ACC supported driving increased with the distance driven. Thesubjects thought they could control both speed and distance to leading vehicles better while driving with the ACC.ACC driving did not influence reaction time, speed level, lateral position or variation in lateral position. Headwayduring car following situations was shorter for the ACC condition compared to manual driving. The ACC was wellreceived, trusted and wanted. It was concluded that the ACC system substantially contributed to decrease workloadand increase comfort for drivers with lower limb disorders.
INTRODUCTION
People with lower limb disorders constitute one of the largest groups of mobility handicapped people. Many ofthese can maintain or regain their independent mobility through driving converted cars. Drivers with impaired legshave to rely on their upper limbs to perform the driving task. This imposes a higher load on their upper limbscompared to able-bodied drivers ([l], [2]) and long distance driving is often experienced as problematic (B]).Reducing the load on the upper limbs would improve comfort and mobility for these drivers. Advanced TransportTelematics (ATT) applications could be used to improve driving conditions for both disabled and elderly if systems
are designed with respect to their need and resources ([4], [5]). This makes ATT applications which are primarily
aimed at improving the driver's comfort like the Adaptive Cruise Control (ACC) particularly interesting.
ACC systems will probably be one of the first in vehicle ATT systems to be introduced on the market. The
conventional Cruise Controller (CC) was developed for constant speed driving on a motor-way with no traffic or
smooth traffic flows. The ACC can handle some interaction with other traffic i.e. adjusting speed in order to keep a
safe distance to a leading vehicle.
Hand controlled accelerator and brakes can be designed in numerous ways. All systems have their pros and cons
depending on the individual driver s need and resources and the specific vehicle. There is no single standard solution
that suits all drivers. The design of the hand controls might influence the driver s steering control ([l]). The specific
questions of interest in this study were: Will ACC driving reduce physical load and improve comfort?, Will ACC
driving influence steering control ?, Will ACC driving influence reaction time?, What influence will ACC driving have
on Headway and TTC (Time-To-Collision) during carfollowing situations ?, Will the drivers approve of the ACC?, and
finally Will the effects ofACC driving be dijåferent depending on the type of hand control systems used?
METHOD
Twenty subjects with lower limb disorders, seventeen men and three women, participated in this study. All subjects
were experienced drivers of converted cars. The subjects were divided in to two subgroups equal in size depending on
the type of hand control they used for manual driving. One group drove with a single lever system and the other a dual
lever system for accelerating and braking. The first group had a mean age of 37.6 years and the second 41.9 years. The
total mean age was 39.8 years (sd 11.1). The rather few number of female subjects (15%) corresponds to the gender
distribution among lower limb disabled people in general. All subjects had a minimum driving experience of at least 2
years (mean 9.7 years) or at least 40,000 km in converted cars equipped with the type of hand control they used in this
study. They estimated that they drove between 10,000 and 45,000 km per year (mean 22,200 km, sd 10,340 km).The
study was performed as a two by two mixed factorial design. All subjects drove both with and without ACC but with
only one hand control system. The order of ACC condition was counterbalanced.
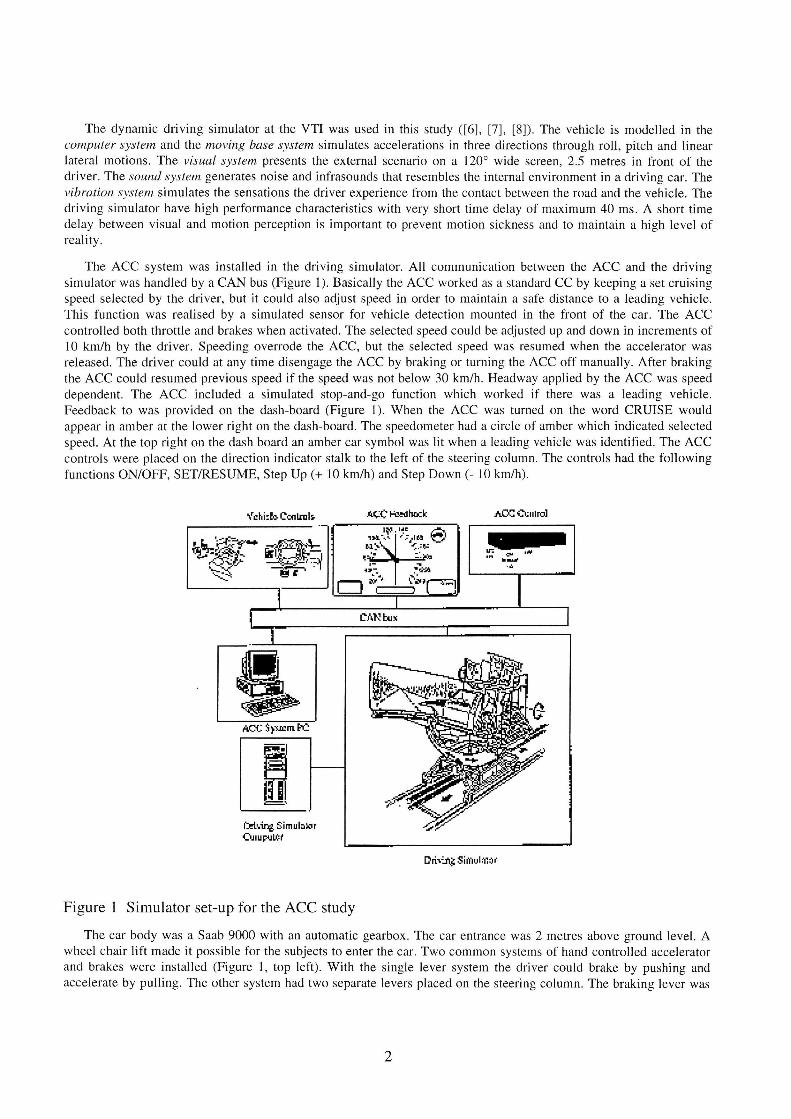
The dynamic driving simulator at the VTI was used in this study ([6], [7], [8]). The vehicle is modelled in the
computer system and the moving base system simulates accelerations in three directions through roll, pitch and linear
lateral motions. The visual system presents the external scenario on a 120O wide screen, 2.5 metres in front of the
driver. The sound system generates noise and infrasounds that resembles the internal environment in a driving car. The
vibration system simulates the sensations the driver experience from the contact between the road and the vehicle. The
driving simulator have high performance characteristics with very short time delay of maximum 40 ms. A short time
delay between visual and motion perception is important to prevent motion sickness and to maintain a high level of
reality.
The ACC system was installed in the driving simulator. All communication between the ACC and the driving
simulator was handled by a CAN bus (Figure l). Basically the ACC worked as a standard CC by keeping a set cruising
speed selected by the driver, but it could also adjust speed in order to maintain a safe distance to a leading vehicle.
This function was realised by a simulated sensor for vehicle detection mounted in the front of the car. The ACC
controlled both throttle and brakes when activated. The selected speed could be adjusted up and down in increments of
10 km/h by the driver. Speeding overrode the ACC, but the selected speed was resumed when the accelerator was
released. The driver could at any time disengage the ACC by braking or turning the ACC off manually. After braking
the ACC could resumed previous speed if the speed was not below 30 km/h. Headway applied by the ACC was speed
dependent. The ACC included a simulated stop-and-go function which worked if there was a leading vehicle.
Feedback to was provided on the dash board (Figure l). When the ACC was turned on the word CRUISE would
appear in amber at the lower right on the dash board. The speedometer had a circle of amber which indicated selected
speed. At the top right on the dash board an amber car symbol was lit when a leading vehicle was identified. The ACC
controls were placed on the direction indicator stalk to the left of the steering column. The controls had the following
functions ON/OFF, SET/RESUME, Step Up (+ 10 km/h) and Step Down (- 10 km/h).
'urchizlo Central: h ? I- aedhmk ACC Chink-J]
"äs-5:55; - if} _
få ? gig-'a'=; en l.
fitting SimulabarCmupumr
Biting Sirl'lulfmf
Figure l Simulator set up for the ACC study
The car body was a Saab 9000 with an automatic gearbox. The car entrance was 2 metres above ground level. A
wheel chair lift made it possible for the subjects to enter the car. Two common systems of hand controlled accelerator
and brakes were installed (Figure l, top left). With the single lever system the driver could brake by pushing and
accelerate by pulling. The other system had two separate levers placed on the steering column. The braking lever was
pushed, and the accelerator lever was moved radially. Both systems were operated by the driver's right hand. The left
hand was used for steering.
The test road was 9 m wide with two lanes each 3,5 m wide and with a hard shoulder of 1 m. The road surface
consisted of asphalt with randomised texture with high friction. It was daylight conditions with a sight distance of
approximately 500 m. The route consisted of mixed straight sections and sections with varying horizontal and vertical
curvature. The route included also cross roads with traffic lights. The speed limit, marked by road signs, was in
general 90 km/h but 70 km/h at traffic lights. The experimental route was 100 km long. The same route was used for
all subjects and both with and without ACC.
Different traffic situations appeared in a randomised sequence but equal to all subjects during the driving session.
The subjects were meeting oncoming vehicles. There were six cross roads with traffic lights along the test route.
Unexpected traffic events were simulated by visual stimulus. Yellow and red squares were displayed at the left side of
the road. The squares were 4 x 4 cm in size and at a distance of 2.5 m from the driver's eyes, representing an
approximate sight angle of 1°. The subjects were told to brake as fast as possible for red squares and to do nothing for
the yellow. There were sixteen carfollowing situations during the ride. Catching up procedure was standardised. There
were four types of car following situations: Leading vehicle braking, Leading vehicle driving with varying speed,
Leading vehicle with constant speed, Leading vehicle stopping at traffic lights.
The following measures were used: speed, lateral position on the road, time headway, and reaction time.
Subjective measures of workload (NASA - RTLX) ([9], [10]) and questionnaires were used to collect the subject's
opinion. Before the test all subjects were give written and verbal instructions and answered a questionnaire about age,
gender, handicap, and driving experience. All subjects were instructed to drive and interact with other road users as
they would do normally in real life traffic under comparable conditions. At both occasions, with and without ACC, the
subjects drove a 20 km long training route where all the relevant traffic situations were demonstrated. After the test
drive all subjects rated their workload and in a separate questionnaire answered questions regarding experienced
reality, experienced illness, speed and distance control, and usability of the ACC system.
RESULTS
The general driving behaviour was analysed in terms of mean speed and lateral position on the road and the
variations of these measures. The mean speed level was for ACC driving 88.6 km/h (single lever drivers 89.3 km/h and
dual lever drivers 87.8 km/h) and for No ACC driving 89.1 km/h (single lever drivers 88.2 km/h and dual lever drivers
89.9 km/h). A two way ANOVA did not show any significant (5%) interactions or main effects. The lateral position
indicated how far to the right in the lane the driver were driving, i.e. the distance between the centre of the steering
wheel and the mid-line of the road. Analysis of mean lateral position measures over 100 km showed that single lever
users drove on average approx. 14 cm more to the left than the other group. This difference was significant (F(1,36) =
5.00, p: .0317). There was though no interaction effects (5%) and no main effects from ACC use. This difference in
lateral position turned out to be consistent both for free flow driving and during car following situations.
Free flow driving was defined as the total distance when the subjects did not have to deal with catching up,
overtaking, or traffic lights situations. They just followed the road and occasionally met oncoming traffic. The total
free flow driving distance was approximately 60 km (60%) of the total route. The mean speed for free flow driving
was for the ACC condition 94.7 km/h (single lever drivers 95.4 km/h and dual lever drivers 94.1 km/h) and for No
ACC driving 96.3 km/h (single lever drivers 95.0 km/h and dual lever drivers 97.6 km/h). There were no interaction or
main effects (5%). The variation in speed was for the ACC condition 3.3 km/h (equal for both groups) and for No
ACC driving 4.7 km/h (single lever drivers 5.3 km/h and dual lever drivers 4.1 km/h). The difference between ACC
and No ACC was significant (F(1,36) = 6.59, p= .0145). The mean variation in lateral position was analysed with a
two way ANOVA and showed no interaction effect but a main effect due to hand control (F(1,36) = 5.24, p= .0280).
Single lever drivers had a greater variation in lateral position (0.27 m) compared to those driving with the dual lever
system (0.21 m) (F(1,36) = 12.12, p= .0013).Manual speed keeping imposes a constant load on the driver. Variation in
speed (km/h) during free flow driving was analysed to detect possible degradation in manual speed keeping compared
to ACC driving. The difference increased with distance driven (Figure 2).

+ - Total
W&W Dual lever
+ Single lever
O-25km 25-50km 50-75km 75-100km !
l
li Distance
Figure 2 Difference in speed variation (km) between No ACC and ACC condition
Mean (n = 4) reaction time for red squares were calculated for all subjects. The mean reaction time for the ACCcondition was 1.32 s (1.41 s for single lever drivers and 1.23 5 for dual lever drivers) and 1.43 s for the No ACCcondition (1.50 s for single lever drivers and 1.37 s for dual lever drivers). A two-way ANOVA revealed no interactionor main effects (5%).
Car following situations were analysed with respect to mean headway, variation in headway, shortest headway,time to collision (TTC), speed and lateral position. Headway was defined as the time distance between the front end ofthe subject s car to the rear end of the vehicle in front divided with the current speed of the subject s car. Time-to-collision (TTC) was defined as the time it would take to drive the distance to a leading vehicle with the speeddifference between the two cars involved i.e. if the two cars drove with the same speed the TTC would be indefinite
independent of speed level and distance. The mean headway was longer while driving without ACC 3.3 s (single lever
drivers 3.2 5 and dual lever drivers 3.4 s) compared to ACC driving condition 2.6 s (same for both groups). The main
effect from ACC was significant (F(1,36) = 8.82, p = 0053) but there was no main effect of hand control nor any
interaction effects. Headway variation was reduced when the ACC system was available 1.0 compared to 1.4 s. Also
this main effect was significant (F(1,36) = 15.68, p = 003). The average min TTC was 5.2 s while driving without
ACC and 7.3 s while driving with (F(1,36) = 7.39, p = .01). Speed and lateral position were also analysed for the car
following situation. The results conformed to what was found for the free flow driving. Less variation in speed for the
ACC condition (F(1,36) = 12.61, p = 0011) and dual lever users drove more to the right (F(1,36) = 4.80, p = .0351)
and vary less in lateral position (F(1,36) = 6.47, p = .0154). The shortest headway was considered to be critical for the
car following situations. The number of short headway deceased while driving with the ACC.
Subjective workload. After each driving session the subjects rated the six workload factors; mental demand,
physical demand, time pressure, performance, e ort, and frustration level on separate continuous subscales ranging
from very low (0) to very high (100). Workload was on three separate forms for the total driving task, car following
situations, and car following at trafic lights. The loading factors were in general rated lower and performance higher
for the ACC condition for both groups. The total driving task was rated as more loading with No ACC than with ACC
(Figure 3). Two way ANOVAs revealed significant main effects of ACC mode for four factors: physical demand
(F(1,36) = 10.13; p = 0030), time pressure (F(l,36) = 6.13; p = .0181), performance (F(l,36) = 4.12; p = 0497), and
e ort (F(1,36) = 4.67; p = .0373). No main effects of hand control or interaction effects were found.
The car following situations were also in general considered to be less loading under ACC driving conditions.
There were significant main effects of ACC mode for five of the work load factors: mental demand (F(1,36) = 14.96; p
= 0004), physical demand (F(1,36) = 16.99; p = 0002), performance (F(1,36) = 7.01; p = .0119), frustration level
(F(1,36) = 5.66; p = 0229) and effort (F(1,36) = 5.38; p = 0262). There were only two car following situations at
trafic lights in total. All loading factors were lower for the ACC condition and performance higher (p < 02). There
were no interaction effects.
Total Driving Task
Effort
Performance D AOC
I No ACC Time pressure
Physical demand
0,00 20,00 40,00 60,00 80,00
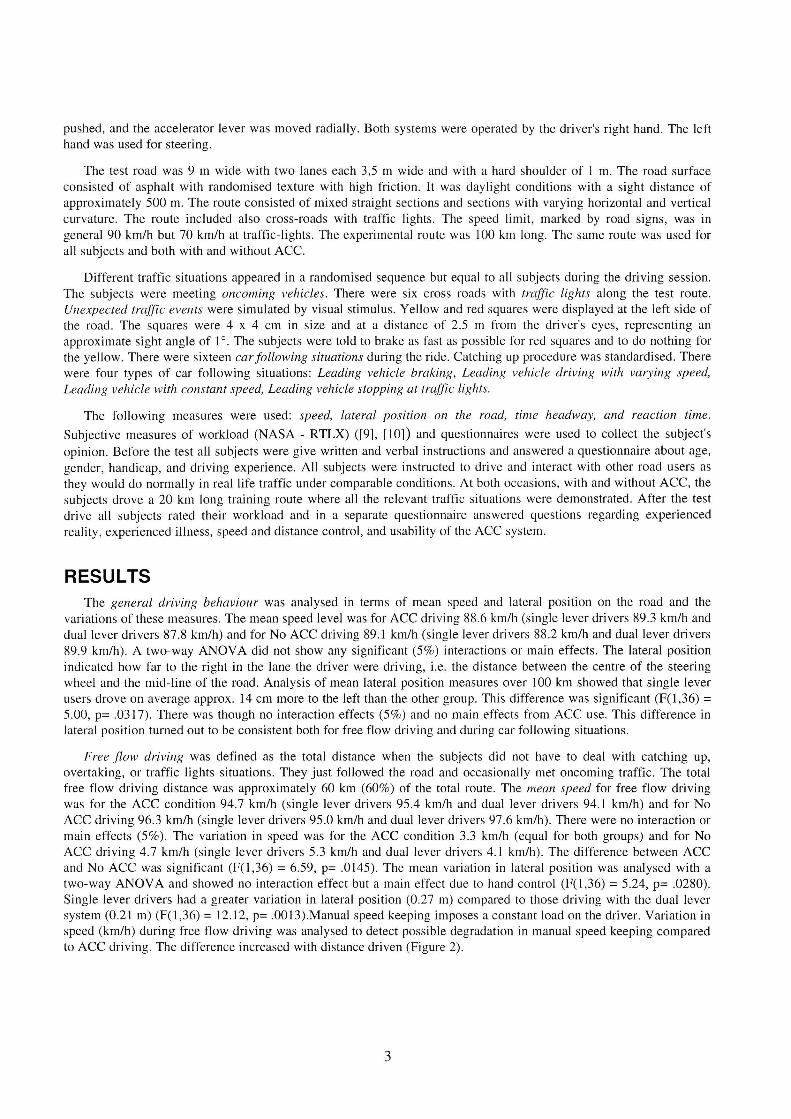
Figure 3 Mean workload ratings for both groups (n=20) of the total driving task with and withoutACC.
Speed and distance control. The subjects were asked to rate how well they could control speed level and how mucheffort they had to assigned to control it. The same types of questions were asked for the distance control to a vehicleahead. Scales with seven steps were used ( 1 = very bad / no effort and 7 = very well / very high effort). Bothgroups rated the control to be higher and effort to be lower for the ACC condition: speed keeping (ACC mean = 6.2,
No ACC mean = 4.0), speed keeping effort (ACC mean = 1.6, No ACC mean = 3.6), distance keeping (ACC mean =
5.8, No ACC mean = 4.6), distance keeping e ort (ACC mean = 1.7, No ACC mean = 3.0). All differences were
significant (p < 0.015) but there were no main effects of type of hand control and no interaction effects.
ACC usage. After driving with the ACC the subjects were asked rate some aspects which were considered to be
important for ACC usage and acceptance. A seven point rating scale was used. The results were General opinion of
the ACC? (mean = 6.7 sd = 0.75), ACC contribution to comfort? (mean = 6.5 sd = 0.95), Learn to use ACC?
(mean = 6.7 sd = 0.59), Trusting ACC? (mean = 6.5 sd = 0.69), Wanting to have ACC? (mean = 6.9 sd = 0.45),
ACC better than own CC? (mean = 6.5 sd = 0.77).
DISCUSSION
Physical overload in the upper limbs caused by driving is a serious problem for drivers with lower limb
impairments. It does not just cause discomfort but can eventually cause musculo-skeletal problems and reduced
mobility. It was expected that ACC driving would reduce workload and improve comfort which was also confirmed.
The subjects estimated the experienced workload for the total driving task and the car following situations including
traffic lights to be substantially lower when the ACC was available and performance higher (Figure 3). For the total
driving task it was found that ACC supported driving was experienced to be 50% less loading with respect to physical
demand and time pressure and effort was rated to be 40% lower (Figure 3). Analysis of the variation in speed during
free ow driving supports these findings (Figure 2). Speed control seems to become more loading as the driving
proceeds. This is indicated by increased variation in speed. Specific questions concerning speed and distance control
showed that the subjects found it much easier and less loading to control both speed and distance to leading vehicles
when using the ACC system. The ACC system decreased the workload to a level approximately equal to what have
been found for able bodied drivers ([1 l]) under comparable conditions. There were no differences between the
two subgroups in this respect. The subjects attitudes to the ACC system were recorded by a questionnaire. The ACC
system was very well accepted, wanted and trusted by the subjects. They found the system easy to learn and that it
contributed substantially to increase comfort. The answers were more positive than what was found in an other
comparable study with able-bodied drivers ([ll]). The ACC was also very much preferred over conventional CC.

Nineteen out of twenty (95%) subjects had a conventional CC in their own car. This is far more than in other studiesWith able bodied drivers where only approx. 10% had a CC ([11], [12]). These results show that the ACC applicationcan be of important value beyond mere comfort to improve the independent mobility of drivers with lower limbimpairments.
Both headway and TTC are crucial parameters for car following situations. Headway determines the time distanceand TTC the approaching speed to a leading vehicle. When headway data was analysed for the car following situationsit was found that both variation in headway and mean headway decreased when the ACC was available. The reducedvariation in headway indicated a smoother traffic flow. Mean headway was approximately 0.7 seconds shorter forACC condition. This meant that on average the subjects were driving 17 m closer at a speed of 90 km/h to leadingvehicles. This shorter distance was accepted but it does not seem to conform to the distance preferred duringunsupported driving. This result is in line with what have been found in a number of other studies with able-bodieddrivers ([13]). These results seems to indicate that headway should preferably be adjustable according to driver'scharacteristics and preferences in order to conform to the individual driving behaviour. This need is likely to be evenmore pronounced when considering bad weather conditions, night time driving etc. The number of shortest headwaysper individual were deceased when ACC was used but the average of the shortest headways was not significantlydifferent between the two conditions. Min TTC during car following was approx. 2 s less for the unsupportedcondition. This means that speed difference was greater when the ACC was not used. It should be noted though thatthere were no safety critical situations included in this test.
Choice reaction time was used as a measure of the driver s alertness. The reaction manoeuvres (brake for a visualstimuli) were different depending on the type of hand control used and ACC condition. For the unsupported conditionthe drivers using the dual lever system had to move his/her hand from the speed lever to the brake lever. This was notthe case for those who used the single lever system but they had to move the lever a longer distance. When the ACCsystem was engaged the driver was free to place his/her right hand on the steering wheel or on the brake lever orsomewhere else irrelevant to the driving task. If the driver prefered to place it on the brake lever this could influencethe brake reaction time. There was though no influence of ACC mode or type of hand control on the choice reactiontime nor did the reaction times change with order of appearance.
The two types of hand control systems used in the study could in uence the steering control in different ways. The
drivers who used the single lever system could use only one hand for steering while driving without ACC while the
dual lever system allowed the drivers to keep both hands on the steering wheel. In an earlier study ([1]) with
quadriplegic drivers it was found that the variation in lateral position was 7 cm greater for those who used the dual
lever system compared those driving with the single lever system. It was suggested that this could be caused by
interference between the steering control and speed control. The analysis of lateral position data in this study showed
that the dual lever users had 6 cm less variation in lateral position compared to the other. They drove also on average
14 cm more to the right in the lane. These findings were consistent for the complete route, free flow driving, and car
following situations and independent of ACC condition. If the differences between the two subgroups were caused by
the hand controls or if the groups were just different in their driving behaviour is hard to say. The differences between
the groups found in this and the previous study are contradictory with respect to variation in lateral control.. ACC
driving was expected to improve the lateral control by decreasing lateral variation as both hands could be used for
steering but the analysis did though not revealed any decrease for none of the groups. This seems to support the idea
that there were differences in driving behaviour between the groups which influenced the variation in lateral position
The single lever users continued to steer with one hand most of the time (more than 70% of the time) even when the
ACC was available. This might explain why there was no effects of ACC support on the variation in lateral position
for these drivers. The driving task was though not very demanding with respect to lateral control and the benefit of
having both hands available for steering control might appear first when the steering control demands get higher.
The general driving behaviour was analysed with respect to speed and lateral position. There were no effects of
ACC mode or type of hand control system on the mean speed level. The mean speed level for the total route, including
car following, overtaking, and stopping, was just below 90 km/h. Mean speed for free flow driving was approx. 5 km/h
higher but the difference was not significant (5%). The variation in speed during free flow driving was reduced when
the ACC was used.
This study did not include any critical situations but it is expected that the same safety considerations as for other
driver apply also to drivers with disabilities but might be more prounced depending of the type of handicap. Drivers
with disabilities in general does though not seem to differ from other drivers with respect to traffic accidentinvolvement on the contrary there is some evidence that they are less involved in accidents ([14]). ACC systems areaimed to increase the driver's comfort but the use of them might have negative safety implications due to highexpectations ([12]). Form the driver s point of view the ACC might appear to include a Collision Avoidance System(CAS). Thus it is important to make the distinction clear between ACC and CAS to the user especially when thefeedback of the ACC is designed ([15]). Feedback aspects of ACC driving should also be evaluated with respect todrivers with perceptual impairments. Control aspects of the ACC system were not explicitly considered in this studybut it seems clear that the controls used were not optimally designed with respect to the group of drivers considered.Further testing would be of value.
The results from this study can be of value for the further development of the ACC application and the design of itsHMI (Human Machine Interface). ACC systems are not yet available on the market. Only limited testing have beenperformed so far and there has not emerged very much guidance on how the ACC application should be designed ingeneral and virtually nothing with respect to drivers with disabilities. The next step in developing the ACC could be torealise "green wave" or "stop and go" functions. Such features would make the ACC application even useful in moreurban like environments and extend its value for drivers with disabilities.
CONCLUSIONS
* ACC reduced workload and increased comfort
* ACC support becomes more important over longer distances
* ACC was rated to improve speed and distance control in car following situations
* ACC system was well accepted, wanted and trusted
* ACC driving produced a shorter mean time headways compared to manual driving
* ACC had no effects on speed level, variation in lateral position, or reaction time.
* ACC driving did not influence workload, comfort, and driving behaviour differently with respect to type of hand
control used
ACKNOWLEDGEMENTS
This study was performed by the VTI as part of the DRIVE II Project V2032 (TELAID). The work was financially
supported by the Swedish Transport Research Board (TFB). Saab Automobile provided the ACC system and
AMU/K'avlinge the hand controls.
ENDNOTESl. Peters, B. and L. Nilsson. Driving Performance of DSN (Drivers with Special Needs) using Hand Controls for
Braking and Accelerating. in 26th International Symposium on Automotive Technology nd Automation (ISATA).
1993. Aachen, Germany: Automotive Automation Ltd, London.
2. Verwey, W. and R. Veenbaas, Driving Performance of Paraplegic Drivers using Common Hand Controls for
Accelerating and Braking, . 1993, TNO Human Factors Research Institute: Soesterberg, NL.
3. Nicolle, C., T. Ross, and S. Richardson, Identification and Grouping of Requirements for Drivers with Special
Needs, . 1992: Thesaloniki, Greece.
4. Parviainen, J.A., W.G. Atkinson, and M.L. Young, Application ofMicro-Electronic Technology to Assist Elderly
and Disabled Travellers, . 1991, Transportation Development Centre Policy and Coordination Transport Canada.
5. Guthrie, B.M. and A.J. Philips. Market Estimates of Intelligent Transportation Systems for Seniors and People
with Disabilities. in First World Congress on Applications of Transport Telematics and Intelligent Vehicle-
Highway Systems. 1994. Paris, France: Artech House, London.
6. Nilsson, L., The VTI Driving Simulator Description of a Research Tool, . 1989.

10.
11.
12.
13.
14.
15.
Nilsson, L. Behavioural Reseach in an Advanced Driving Simulator - Experiences of the VTI System. in 37th
Annual Meeting of the Human Factors and Egonomics Society. 1993. Seattle, USA.
Nordmark, S. The VTI Driving Simulator - Trends and Experiences. in Road Safety and Tra ic Environment in
Europe. 1990. Gothenburg.
Hart, SG. and L.E. Staveland, Development ofNASA - TLX (Task Load Index): Results of Empirical and
Theoretical Research, in Human Mental Workload, P.A. Hancock and N. Meshkati, Editors. 1988, Elsivier
Science Publisher B.V. p. 139 183.
Byers, J.C., A.C. Bittner, and S.G. Hill. Traditional and Raw Task Load Index (TLX) Correlations: Are paired
comparisons necessary? in Advances in Industrial Ergonomics and Safety I . 1989: Taylor and Francis.
Nilsson, L., Driving with Autonomous Intelligent Cruise Control in Critical Traffic Situations. Effects on Driver
Behaviour, Workload and Attitudes, . 1995.
Nilsson, L. Safety E ects ofAdaptive Cruise Controls in Critical Tra ic Situations. in Second World Congress of
Intelligent Transport Systems. 1995 . Yokohama.
Morello, E., Cross-Project Evaluation of Transport Telematics Applications; Final Report, . 1996.
Haslegrave, C.M., Car Control Conversions for Disabled Drivers, . 1986, TRL: Crowthorn, UK.
Duncan, B. and M. Fuchs. MMI Desing for AICC and Collision Avoidance Systems. in First World Congress on
Applications of Transport Telematics and Intelligent Vehicle-Highway Systems. 1994. Paris, France: Artech
House, London.