Ergonomic Deficits in Robotic Gynecologic Oncology Surgery: A Need for Intervention
8
Original Article Ergonomic Deficits in Robotic Gynecologic Oncology Surgery: A Need for Intervention Renatta Craven, MS 1 , Jason Franasiak, MD 1 , Prithima Mosaly, PhD, and Paola A. Gehrig, MD* From the University of North Carolina School of Medicine (Ms. Craven), Departments of Obstetrics and Gynecology (Dr. Franasiak), Radiation Oncology (Dr. Mosaly), and Division of Gynecologic Oncology, Department of Obstetrics and Gynecology (Dr. Gehrig), University of North Carolina, Chapel Hill, North Carolina. ABSTRACT Study Objective: To evaluate surgeon strain using validated ergonomic assessment tools. Design: Observational study (Canadian Task Force classification III). Setting: Academic medical center. Participants: Robotic surgeons performing gynecologic oncology surgical procedures. Interventions: Videotape footage of surgeons performing robotic gynecologic oncology procedures was obtained. A human factors engineer experienced with health care ergonomics analyzed the video recordings and performed ergonomic evalua- tions of the surgeons. Measurements and Main Results: An initial evaluation was conducted using the Rapid Upper Limb Assessment (RULA) survey, an ergonomic assessment and prioritization method for determining posture, force, and frequency concerns with focus on the upper limbs. A more detailed analysis followed using the Strain Index (SI) method, which uses multiplicative interac- tions to identify jobs that are potentially hazardous. Seventeen hours of video recordings were analyzed, and descriptive data based on RULA/SI analysis were collected. Ergonomic evaluation of surgeon activity resulted in a mean RULA score of 6.46 (maximum possible RULA score, 7), indicating a need for further investigation. The mean SI grand score was 24.34. SI scores .10 suggest a potential for hazard to the operator. Thus, the current use of the surgical robot is potentially dangerous with regards to ergonomic positioning and should be modified. Conclusion: At a high-volume robotics center, there are ergonomics deficits that are hazardous to gynecologic surgeons and suggest the need for modification and intervention. A training strategy must be developed to address these ergonomic issues and knowledge deficiencies. Journal of Minimally Invasive Gynecology (2013) 20, 648–655 Ó 2013 AAGL. All rights reserved. Keywords: Ergonomics; Occupational strain; Rapid upper limb assessment; Robotic surgery; Strain Index DISCUSS You can discuss this article with its authors and with other AAGL members at http://www.AAGL.org/jmig-20-4-JMIG-D-13-00188 Use your Smartphone to scan this QR code and connect to the discussion forum for this article now* * Download a free QR Code scanner by searching for ‘‘QR scanner’’ in your smartphone’s app store or app marketplace. Ergonomic strain among surgeons performing minimally invasive surgery (MIS) is more pervasive than previously thought. Historically, surgeon strain related to MIS has been quoted at 12% to 18% [1,2]. However, recent studies in the general surgery and gynecologic oncology literature report strain rates as high as 87% to 88% [3,4]. Strain during traditional laparoscopy has been attributed largely to nonergonomic positioning [5,6]. Robotic surgery, a subset of MIS, is widely thought to provide ergonomic benefit while also expanding surgeon capabilities [7,8]. Although strain among surgeons performing robotic surgery is generally thought to be lower than that in surgeons using The authors have no commercial, proprietary, or financial interest in the products or companies described in this article. 1 Ms. Craven and Dr. Franasiak contributed equally to this article. Presented at the Annual Meeting of the Society of Gynecologic Oncologists, March 11, 2013, Los Angeles, CA. Corresponding author: Paola A. Gehrig, MD, Director, Division of Gyneco- logic Oncology, Department of Obstetrics and Gynecology, University of North Carolina, CB# 7572, Chapel Hill, NC 27599-7572. E-mail: [email protected] Submitted March 26, 2013. Accepted for publication April 15, 2013. Available at www.sciencedirect.com and www.jmig.org 1553-4650/$ - see front matter Ó 2013 AAGL. All rights reserved. http://dx.doi.org/10.1016/j.jmig.2013.04.008
Transcript of Ergonomic Deficits in Robotic Gynecologic Oncology Surgery: A Need for Intervention

Original Article
Ergonomic Deficits in Robotic Gynecologic Oncology Surgery:A Need for Intervention
Renatta Craven, MS1, Jason Franasiak, MD1, Prithima Mosaly, PhD, and Paola A. Gehrig, MD*From the University of North Carolina School of Medicine (Ms. Craven), Departments of Obstetrics and Gynecology (Dr. Franasiak), Radiation Oncology
(Dr. Mosaly), and Division of Gynecologic Oncology, Department of Obstetrics and Gynecology (Dr. Gehrig), University of North Carolina, Chapel Hill,
North Carolina.
ABSTRACT Study Objective: To evaluate surgeon strain using validated ergonomic assessment tools.
The authors have
products or comp1Ms. Craven and
Presented at the A
March 11, 2013,
Corresponding au
logic Oncology,
North Carolina, C
E-mail: paola_ge
Submitted March
Available at www
1553-4650/$ - see
http://dx.doi.org/1
Design: Observational study (Canadian Task Force classification III).Setting: Academic medical center.Participants: Robotic surgeons performing gynecologic oncology surgical procedures.Interventions: Videotape footage of surgeons performing robotic gynecologic oncology procedures was obtained. A humanfactors engineer experienced with health care ergonomics analyzed the video recordings and performed ergonomic evalua-tions of the surgeons.Measurements and Main Results: An initial evaluation was conducted using the Rapid Upper Limb Assessment (RULA)survey, an ergonomic assessment and prioritization method for determining posture, force, and frequency concerns with focuson the upper limbs. A more detailed analysis followed using the Strain Index (SI) method, which uses multiplicative interac-tions to identify jobs that are potentially hazardous. Seventeen hours of video recordings were analyzed, and descriptive databased on RULA/SI analysis were collected. Ergonomic evaluation of surgeon activity resulted in a mean RULA score of 6.46(maximum possible RULA score, 7), indicating a need for further investigation. The mean SI grand score was 24.34. SI scores.10 suggest a potential for hazard to the operator. Thus, the current use of the surgical robot is potentially dangerous withregards to ergonomic positioning and should be modified.Conclusion: At a high-volume robotics center, there are ergonomics deficits that are hazardous to gynecologic surgeonsand suggest the need for modification and intervention. A training strategy must be developed to address these ergonomicissues and knowledge deficiencies. Journal of Minimally Invasive Gynecology (2013) 20, 648–655� 2013 AAGL. All rightsreserved.
Keywords: Ergonomics; Occupational strain; Rapid upper limb assessment; Robotic surgery; Strain Index
DISCUSS
You can discuss this article with its authors and with other AAGL members athttp://www.AAGL.org/jmig-20-4-JMIG-D-13-00188no commercial, proprietary, or financial interest in the
anies described in this article.
Dr. Franasiak contributed equally to this article.
nnualMeeting of the Society of Gynecologic Oncologists,
Los Angeles, CA.
thor: Paola A. Gehrig, MD, Director, Division of Gyneco-
Department of Obstetrics and Gynecology, University of
B# 7572, Chapel Hill, NC 27599-7572.
26, 2013. Accepted for publication April 15, 2013.
.sciencedirect.com and www.jmig.org
front matter � 2013 AAGL. All rights reserved.
0.1016/j.jmig.2013.04.008
Utoadth
se your Smartphonescan this QR code
nd connect to theiscussion forum foris article now*
* Download a free QR Code scanner by searching for ‘‘QRscanner’’ in your smartphone’s app store or app marketplace.
Ergonomic strain among surgeons performing minimallyinvasive surgery (MIS) is more pervasive than previouslythought. Historically, surgeon strain related to MIS hasbeen quoted at 12% to 18% [1,2]. However, recent studiesin the general surgery and gynecologic oncology literaturereport strain rates as high as 87% to 88% [3,4]. Strainduring traditional laparoscopy has been attributed largely tononergonomic positioning [5,6]. Robotic surgery, a subsetof MIS, is widely thought to provide ergonomic benefitwhile also expanding surgeon capabilities [7,8]. Althoughstrain among surgeons performing robotic surgery isgenerally thought to be lower than that in surgeons using

Craven et al. Ergonomic Deficits in Robotic Gynecologic Oncology Surgery 649
traditional laparoscopy, reported neck and torso strain inrobotic surgery remains substantial [9]. The literature indi-cates that a lack of ergonomic knowledge and training inproper ergonomic techniquemay be responsible for the strainassociated with performing robotic surgery [3,4,10].
Although the Da Vinci surgical system (Intuitive Surgi-cal, Inc., Sunnyvale, CA) has experienced widespreadacceptance and growth over the past decade [11–14] andthe early literature suggests that it is more ergonomicallyfavorable and potentially less mentally stressful thanlaparoscopic surgery [15,16], literature evaluating thesepotential ergonomic benefits is sparse. One such studyof gastrointestinal surgeons performing gastric bypasssurgery found that laparoscopy caused more discomfort inthe shoulders, arms, and wrists, according to Rapid UpperLimb Assessment (RULA) analysis, and that roboticsurgery caused more discomfort in the neck and trunkwhen evaluated using the Body Part Discomfort (BPD)scale [9]. The authors concluded that robotic methods of-fered both postural advantages and disadvantages for mini-mally invasive surgeons.
Researchers have used RULA for ergonomic evaluationof MIS because it screens for stressors to the shoulder,elbow, and wrist and prioritizes job tasks for further investi-gation [17–19]. Using descriptive guidelines, the evaluatorassigns numerical values to postures and forces and sumsthese values to arrive at a grand score. RULA evaluationis conducted for one side of the body at a time.Although RULA uses observations of lower limb and neckpositioning, it does not assess ergonomic strain in theseareas [19]. RULA grand scores.5 indicate that the individ-ual performing the job task is at increased risk for musculo-skeletal injury, and grand scores .7 indicate that the job isprobably hazardous. Although RULA makes observationsof lower limb and neck positioning, it does not assess ergo-nomic strain in these areas. To address this caveat, a morecomprehensive tool such as the Strain Index (SI) can beused. The SI is a semiquantitative job analysis method de-signed to identify jobs that are associated with distal upperextremity musculoskeletal disorders vs those that are not[20–24]. The SI is based on multiplicative interactionsamong variables related to distal upper extremity disordersand enables better characterization of tasks identified usingRULA.
While there is general belief that robotic surgery posesless risk of strain than traditional MIS does, the literaturecontains no data specific to gynecologic robotic surgery. Inaddition, although previous research evaluated surgeon tasksusing RULA and provided conclusions based on the RULAscore [9], to our knowledge, no efforts have been made tofurther evaluate the robotic surgery job tasks identified asrisky using RULA. For this reason, we sought to provide in-formation about occupational injury incurred while perform-ing robotic gynecologic surgery using the RULA and SImethods. We hypothesized that although there may be ergo-nomic benefits, strain related to surgery using the robotics
platform will remain a prominent issue for surgeons andthat educational strategies are necessary to modify theserisks.
Material and Methods
The study was approved by the University of North Car-olina at Chapel Hill Institutional Review Board (#12-1072).A subset of robotic surgeries performed at a single high vol-ume robotic surgical center were digitally recorded. In 2012,the center’s Department of Obstetrics and Gynecology per-formed 470 robotic procedures, 351 of which were per-formed by the Division of Gynecologic Oncology. Duringthe study, 14 consecutive procedures were videotaped. A sta-tionary camera was set up so that the surgeon was in viewfrom head to toe, with full view of both hands and thehead, neck, shoulders, arms, and legs. The digital video foot-age was evaluated by an ergonomics specialist consultantblinded to the surgery and the surgeon.
An initial ergonomics assessment was performed usingRULA. A grand score was determined for each side of thebody per cycle. A cycle was defined as the duration oftime during a video segment in which the participant wasperforming uninterrupted surgery. Therefore, there couldbe more than one cycle per surgeon per procedure if therewas a change of surgeons at the robotic console. RULAgrand scores were averaged for all cycles, and an action levelwas assigned. To obtain the grand scores using descriptiveguidelines, the evaluators rated three variables: i) postureof the upper limbs (upper arms, lower arms, wrist posture,and wrist twist) (Fig. 1 and Table 1), to obtain score A; ii)posture of the neck, trunk, and legs (Fig. 1 and Table 2), toobtain score B; and iii) muscle use and force rates, addingthese ratings to scores A and B to obtain scores C and D, re-spectively (Figs. 2 and 3). A grand score was computed fromscores C and D (Figs. 2 and 3). A grand score .5 indicatesthat the individual performing the job task is at increased riskfor musculoskeletal injury, and a grand score .10 indicatesthat the job is probably hazardous.
If preliminary screening suggested the need for further er-gonomics investigation, a second analysis using the SI wasperformed [20]. The SI enables systematic evaluation andprediction of risk of development of a musculoskeletal dis-order in the distal upper extremity. The SI score representsthe product of six multipliers, each corresponding to a taskvariable: intensity of exertion, percentage duration of exer-tion, number of efforts/exertions per minute, hand and wristposture, speed of work, and duration of task exposure perday (Table 3). Scores are cross-referenced with the SI actionlevels to assess the risk of injury. SI action level %4 indi-cates that the job is safe, scores of 5 to 9 indicate increasedrisk, and scores of R10 indicate that the job is hazardous.
Intensity of exertion is an estimate of the force required tocomplete a task and is not related to endurance or stamina. Itcan be measured subjectively or objectively. In the presentstudy, intensity of exertion was measured objectively using

Fig. 1
Rapid Upper Limb Assessment scoring system for postures. Reprinted with permission from Moore [25].
650 Journal of Minimally Invasive Gynecology, Vol 20, No 5, September/October 2013
percent maximal strength [26]. Participant maximal pincerstrength was measured using a dynamometer. They werethen asked to mimic the amount of pincer strength usedwhile performing robotic surgery. The percentage of maxi-mum force used while simulating force applied during ro-botic surgery was then converted to an SI multiplier.
Hand and wrist posture evaluates anatomic positioning ofthe hand and wrist in comparison with neutral posture. Thisvariable rating was determined by ergonomics expert per-ception of wrist flexion/extension and ulnar/radial deviation.Speed of work evaluation was similarly assessed. Durationof exertion is an objective measurement of the duration oftime in seconds in which a surgeon continuously maintainedan exerted posture. Effort per minute is an objective measureof the frequency of achieving an exerted posture during eachminute. Duration of task per day was determined by survey-ing participating robotic surgeons (Table 3).
Results
In total, 17 hours of video footage of 14 robotic surgicalprocedureswas collected. The footage included five surgeons:two gynecology oncology attending surgeons (P.A.G.), onegynecologic oncology fellow, and two obstetrics and gynecol-ogy residents rotating on the gynecologic oncology service.Two were men, and three were women, with mean height172.7 cm (range, 160.0–180.3 cm), mean weight 75.7 kg(range, 63.5–90.7 kg), and mean glove size 7 (range, 6.5–8).
Descriptive variables obtained from the video footageanalysis indicated that the tasks involved in completing ro-botic surgery place the surgeon at increased risk for muscu-loskeletal strain. The mean cycle time during whicha surgeon performed uninterrupted surgery was 1029 sec-onds (range, 108–3001 seconds), or 17.2 minutes (range,1.8–50 minutes). The mean number of exertions per cyclewas 452 (range, 57–1453). The percentage of time when

Table 1
Posture scores (from Fig. 1) for upper limbs to find posture score A
Upper arm
score
Lower arm
score
Wrist posture score
1 2 3 4
Wrist twist
1 2 1 2 1 2 1 2
1 1 1 2 2 2 2 3 3 3
2 2 2 2 2 3 3 3 3
3 2 3 3 3 3 3 4 4
2 1 2 3 3 3 3 4 4 4
2 3 3 3 3 3 4 4 4
3 3 4 4 4 4 4 5 5
3 1 3 3 4 4 4 4 5 5
2 3 4 4 4 4 4 5 5
3 4 4 4 4 4 5 5 5
4 1 4 4 4 4 4 5 5 5
2 4 4 4 4 4 5 5 5
3 4 4 4 5 5 5 6 6
5 1 5 5 5 5 5 6 6 7
2 5 6 6 6 6 7 7 7
3 6 6 6 7 7 7 7 8
6 1 7 7 7 7 7 8 8 9
2 8 8 8 8 8 9 9 9
3 9 9 9 9 9 9 9 9
Fig. 2
Rapid Upper Limb Assessment scoring sheet. Scores A, B, C, and D are
obtained using the subjective scoring methods described in Fig. 1.
‘‘Muscle’’ indicates muscle usage, which depends on how long a posture
is held and/or repeated. ‘‘Force’’ indicates force ratings, which are esti-
mated for each participant by using a dynamometer.
Craven et al. Ergonomic Deficits in Robotic Gynecologic Oncology Surgery 651
the armwas not rested on the console, as compared with totaloperative time, was 37% (range, 8%–74%).
Posture observations using the guidelines shown inFigure 1 were used to calculate the RULA scores. Themean of score A, calculated using descriptive guidelines torate the posture of the upper limb, was 3.58; the mean ofscore B, calculated using descriptive guidelines to rate theposture of the neck and trunk, was 2.05; the mean of scoreC, calculated by adding muscle usage (which depends onhow long a posture is held and/or repeated) and force ratings(estimated for each participant using a dynamometer) toscore A, was 6.53 for the right side and 6.58 for the left
Table 2
Posture scores (from Fig. 1) for neck, trunk and legs to find posture
score B
Neck posture
score
Trunk posture score
1 2 3 4 5 6
Legs
1 2 1 2 1 2 1 2 1 2 1 2
1 1 3 2 3 3 4 5 5 6 6 7 7
2 2 3 2 3 4 5 5 5 6 7 7 7
3 3 3 3 4 4 5 5 6 6 7 7 7
4 5 5 5 6 6 7 7 7 7 7 8 8
5 7 7 7 7 7 8 8 8 8 8 8 8
6 8 8 8 8 8 8 8 9 9 9 9 9
side; and the mean of score D, calculated by adding muscleusage and force ratings to score B, was 5.05. The meanRULA grand score was then computed from scores C andD and was 6.42 on the right side and 6.47 on the left side.This algorithm is shown in Figure 3. A representative scorefor one of the study participants is given in Table 4. This cor-related with a RULA action level between 3 and 4, indicatingthat the individual performing the job task was at increasedrisk for musculoskeletal injury and that investigation withchanges is required (Fig. 4A).
Because of the need for further investigation, SI scoreswere calculated. The six task variables were intensity of ex-ertion, percentage duration of exertion, number of efforts/ex-ertions per minute, hand and wrist posture, speed of work,and duration of task exposure per day. The six variableswere each associated with a multiplier, determined bycross-referencing task variable observations with the SI rat-ing system. The mean intensity of exertion was 3.64, dura-tion of exertion was 3, number of efforts/exertions perminute was 3, hand and wrist posture was 1.79, speed of
Fig. 3
Look-up table for Rapid Upper Limb Assessment grand score.
Score D (neck, trunk, legs)
1 2 3 4 5 6 7+
Scor
e C
(up
per
limb)
1 1 2 3 3 4 5 5
2 2 2 3 4 4 5 5
3 3 3 3 4 4 5 6
4 3 3 3 4 5 6 6
5 4 4 4 5 6 7 7
6 4 4 5 6 6 7 7
7 5 5 6 6 7 7 7
8+ 5 5 6 7 7 7 7

Table 3
Strain Index scoring table
Risk factor Rating criteria Maximum strength (%) Verbal anchors Rating Multiplier
Intensity of exertion Light %10 Barely noticeable or relaxed effort 1 1.0
Somewhat hard 10–30 Noticeable or definite effort 2 3.0
Hard 30–50 Obvious effort; unchanged facial expression 3 6.0
Very hard 50–80 Substantial effort; change in facial expression 4 9.0
Near maximal .80 Use of shoulder or trunk to generate force 5 13.0
Duration of exertion
(duration of all
exertions in sec/total
observation time in
sec) (%)
,10 1 0.5
10–29 2 1.0
30–49 3 1.5
50–79 4 2.0
R80 5 3.0
Efforts per minute (No.
of exertions observed/
total observed time)
,4 1 0.5
4–8 2 1.0
9–14 3 1.5
15–19 4 2.0
R20 5 3.0
Hand/wrist posture Wrist extension Wrist flexion Ulnar deviation Perceived posture
Very good 0�–10� 0�–5� 0�–10� Perfectly neutral 1 1.0
Good 11�–25� 6�–15� 11�–15� Near neutral 2 1.0
Fair 26�–40� 16�–30� 16�–20� Non-neutral 3 1.5
Bad 41�–55� 31�–50� 21�–25� Marked deviation 4 2.0
Very bad R60� .50� .25� Near extreme 5 3.0
Speed of Work Very slow Extremely relaxed pace 1 1.0
Slow Taking one’s own time 2 1.0
Fair Normal speed of motion 3 1.0
Fast Rushed but able to keep up 4 1.5
Very fast Rushed and barely or unable to keep up 5 2.0
Duration per day (hrs) %1 1 0.25
1–2 2 0.50
2–4 3 0.75
4–8 4 1.00
.8 5 1.50
652 Journal of Minimally Invasive Gynecology, Vol 20, No 5, September/October 2013
work was 1, and duration of task exposure per day was 0.43.The mean SI grand score was 24.34 (range, 10.12–40.5)(Fig. 4B). A representative score for one of the study partic-ipants is given in Table 4. An SI score of %4 is considered
Table 4
Examples of calculation of RULA and SI scores for participant Xa
Participant
Upper
arm
Lower
arm Wrist
Wrist
twist
Group A
score Neck Back
R R R R R
X 2 2 3 2 4 2 2
Participant Intensity of exertion Duration of exertion Efforts per minute H
X 6 2 1 1
R 5 right hand; RULA 5 Rapid Upper Limb Assessment; SI 5 Strain Index.a Variables from Fig. 1 and Tables 1 and 2 are used to obtain the RULA score. For the S
simulation of 30%, which correlates with an SI multiplier of 6. The duration of exertion
used to obtain the multipliers for the remaining variables. The product of these multiplier
safe; SI scores between 4 and 9 suggest that the task couldpossibly be improved to lower musculoskeletal disorderrisk; and an SI score ofR10 is considered probably hazard-ous, and further ergonomic investigation or ergonomic
Legs
Group B
score Muscle Force Score C Score D
RULA
score
R R R
1 2 1 2 7 5 6
and/wrist posture Speed of work Duration of work per day SI score
.5 1.5 0.5 13.5
I score, participant X has a percentage of maximum strength used during surgery
is 70 seconds, which correlates with an SI multiplier of 2. Similar correlations are
s generates the SI score.

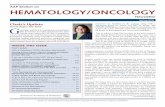
Fig. 4
Results of the Rapid Upper Limb Assessment grand scores (A) and Stress Index scores (B) in terms of their action level thresholds. All scores indicated
a need for further investigation and alteration of the ergonomics in each video cycle, defined as a period of uninterrupted operating.
Craven et al. Ergonomic Deficits in Robotic Gynecologic Oncology Surgery 653
modifications should be made immediately to prevent mus-culoskeletal disorder.
Discussion
The robotics platform is used extensively in general, gas-trointestinal, urologic, and gynecologic surgery, and its rapidadoption continues [8,11,27]. Although the design of theda Vinci robotic platform seems to be geared toward anergonomic operating position, few studies have examinedthis specifically, and none have evaluated gynecologicsurgery. Results of the present study indicate that severeergonomic deficits persist in robotic gynecologic surgeryand that intervention geared toward optimizing ergonomicsis warranted.
There are several benefits to adding the robotics platformto MIS. The 7 degrees of freedom actuator enables instru-ment movement that more closely mimics movement ofthe human wrist and provides a three-dimensional view ofthe surgical field for fine-tissue dissection [13,16]. Leeet al [28] have reported substantially lower RULA and SIscores for the robotic platform vs traditional laparoscopy.In their study they evaluated medical students and junior in-ternal medicine and surgical residents with no MIS experi-ence on simulated surgical tasks in the laboratory [28].Although this study reinforces the idea that robotics providesinherent ergonomic benefit over laparoscopy, the presentstudy, which included both experienced MIS surgeons andsurgeons in training, suggests that, despite some benefits,serious ergonomic deficiencies remain.
Lawson et al [9] evaluated a single surgeonwith advancedMIS skills in a clinical setting. The evaluation revealed lowerRULA scores when compared with laparoscopy for score Acomponents, i.e., upper arm, lower arm, wrist posture, and
wrist twist [9]. Scores ranged from 1.0 to 2.5, dependingon the body part. Those authors also identified a potentialdrawback of the robotic workstation after assessing in-creased body part discomfort scores for the trunk and neckassociated with using the robotics platform. The lowerRULA scores observed in that study may be explained bythe study population, which included only one very experi-enced robotic surgeon. Thus, the study implications maynot be generalizable when considering surgeons of variedsize, experience, and ergonomics training and highlightsthe strength of the present study, in which several surgeonsof varied size and experience were evaluated. These studies,along with our data, emphasize the need for further investi-gation into ergonomics guidelines for the robotic platform.
Lux et al [29] published guidelines for proper positioningusing the da Vinci surgeon console. They reported Occupa-tional Safety and Health Administration [30] workstationguidelines for appropriate positioning and used ergonomicguidelines for microscopists as a foundation for ergonomicsguidelines relating to robotic surgery. Historical strain rates,which ranged between 70% and 75% for microscopists,similar to those of minimally invasive surgeons [30,31],warranted a series of modifications in microscope design.These modifications can be similarly appreciated in the daVinci system and include the armrests, adjustable ocularheight, and headrests [31,32]. Previous studies have alsoshown that when the ocular angle exceeds 30 degrees,substantial static muscle contraction, fatigue, and pain canoccur [33,34]. After applying standards for ergonomicmicroscopy to the robotic system, Lux et al [29] found thatthe surgeon console allows only acceptable posturing for in-dividuals with height between 64 and 73 inches. This was anissue in the present study, in which surgeon height rangedfrom 63 to 71 inches. This standard indicated that the findings

654 Journal of Minimally Invasive Gynecology, Vol 20, No 5, September/October 2013
of severe ergonomic deficiencies could have been due in partto surgeons being outside the acceptable posture range.
Several conclusions and recommendations can be madefor the ergonomic setup of robotic surgery systems [29].The console chair should be on lockable castors for easeof mobility near the console workstation and have readilyadjustable height, lumbar support, and seat angle tilt. Theseat depth should be adjustable as well, to attain maximalbenefit from lumbar support. Given these recommendations,the console chair could present a problem for surgeons be-cause of the high degree of variability in chairs at our insti-tution and sister institutions. Insofar as robotic consolesetup, the surgeon should attempt to maintain a neutral posi-tion, with feet resting on the ground in front of the pedals atan angle ofR90 degrees. The upper arms should remain per-pendicular to the floor, with the elbows forming a 90-degreeangle and tucked close to the body and the forearms restingon the armrest in a neutral position. This was a major issueidentified in the present study because surgeons did nothave their arms at rest on average 37% of the time. The angleof the neck should be approximately 20 degrees, and the headshould be placed only lightly on the headrest. Although mostof the recommendations put forth seem to be common sense,our observational data as well as RULA and SI scores provethat these recommendations are difficult to maintain for theduration of surgery and perhaps point to the need for moreformal training and assessment of ergonomic positioningfor gynecologic surgeons who perform robotic surgery.
Limitations of our study include its observational natureand relatively small size insofar as number of surgeonsand surgical procedures observed. Surgeon posture was eval-uated by a single expert evaluator (P.M.) from one side onlybecause of the setup of the video camera and thus was an ap-proximate rather than absolute posture assessment. Thestudy surgeons were not blinded, which could introducebias in the form of altered surgical practices. However, thiswould likely bias away from strain because surgeons wouldlikely be more cognizant of their surgical technique and po-sitioning. In addition, although the RULA and SI scores arestandardized and validated [18], they are inherently subjec-tive. Strengths of the study are that it is the first to evaluategynecologic robotic surgery using validated ergonomicstools, and it confirms many surgeon subjective findings ofstrain during robotic surgery. In addition, evaluation of sev-eral surgeons of varying expertise, sex, and height and thevariable procedures and duration of procedures all add tothe generalizability of our findings.
The data suggest that strain is an important issue in ro-botic surgery and requires improvements in ergonomicstraining and robotic workstations. A concerted effort shouldbe made to make available an ergonomics expert to assistsurgeons in individualizing their console settings. Such in-tervention would base console settings on surgeon comfortat a static moment and may reduce risk of future musculo-skeletal injury. In addition, standardizing console seatswith the most appropriate lumbar support and locking mech-
anism may also assist with efforts to minimize surgeonstrain. Furthermore, inasmuch as the demographics of ro-botic surgeons is variable, we must consider modificationsneeded to accommodate shorter or taller surgeons. Forshorter surgeons (,64 inches), lifts can be placed underthe robotic pedals to allow for a 90-degree angle of the leg[29]. A more difficult issue is achieving the appropriate20-degree angle of the neck in surgeons taller than 73 inches.This will require special seating to still enable appropriateleg positioning.
Futurework is needed that implements ergonomic modifi-cations and assesses the feasibility of training interventions.Such studies may shed light on optimal ways to minimizestrain and work-related injury among robotic surgeons,thereby ensuring the durability of the workforce. We are per-forming an ongoing multiple-specialty study assessing thefeasibility of an ergonomics intervention tool for surgeonergonomics knowledge and sustained change of practice.
References
1. Berguer R. Surgery and ergonomics. Arch Surg. 1999;134:1011–1016.
2. Lawther RE, Kirk GR, Regan MC. Laparoscopic procedures are asso-
ciated with a significant risk of digital nerve injury for general surgeons.
Ann R Coll Surg Engl. 2002;84:443.
3. Park A, Lee G, Seagull FJ, Meenaghan N, Dexter D. Patients benefit
while surgeons suffer: an impending epidemic. J Am Coll Surg. 2010;
210:306–313.
4. Franasiak J, Ko EM, Kidd J, et al. Physical strain and urgent need for
ergonomic training among gynecologic oncologists who perform min-
imally invasive surgery. Gynecol Oncol. 2012;126:437–442.
5. Berguer R. Surgical technology and the ergonomics of laparoscopic
instruments. Surg Endosc. 1998;12:458–462.
6. Nguyen NT, Ho HS, Smith WD, et al. An ergonomic evaluation of sur-
geons’ axial skeletal and upper extremity movements during laparo-
scopic and open surgery. Am J Surg. 2001;182:720–724.
7. Mucksavage P, Kerbl DC, Lee JY. The da Vinci Surgical System over-
comes innate hand dominance. J Endourol. 2011;25:1385–1388.
8. Schreuder HW, Verheijen RH. Robotic surgery. BJOG. 2009;116:
198–213.
9. Lawson EH, Curet MJ, Sanchez BR, Schuster R, Berguer R. Postural
ergonomics during robotic and laparoscopic gastric bypass surgery:
a pilot project. J Robot Surg. 2007;1:61–67.
10. Stone R, McCloy R. Ergonomics in medicine and surgery. BMJ. 2004;
328:1115–1118.
11. Wexner SD, Bergamaschi R, Lacy A, et al. The current status of robotic
pelvic surgery: results of a multinational interdisciplinary consensus
conference. Surg Endosc. 2009;23:438–443.
12. Challacombe BJ, Khan MS, Murphy D, Dasgupta P. The history of
robotics in urology. World J Urol. 2006;24:120–127.
13. Ballantyne GH, Moll F. The da Vinci telerobotic surgical system: the
virtual operative field and telepresence surgery. Surg Clin North Am.
2003;83:1293–1304, vii.
14. Ruurda JP, van Vroonhoven TJ, Broeders IA. Robot-assisted surgical
systems: a new era in laparoscopic surgery. Ann R Coll Surg Engl.
2002;84:223–226.
15. Mohr CJ, Nadzam GS, Curet MJ. Totally robotic Roux-en-Y gastric
bypass. Arch Surg. 2005;140:779–786.
16. Talamini MA, Chapman S, Horgan S, Melvin WS, Academic Robotics
Group. A prospective analysis of 211 robotic-assisted surgical proce-
dures. Surg Endosc. 2003;17:1521–1524.
17. McAtamney L, Corlett EN. Ergonomic workplace assessment in
a health care context. Ergonomics. 1992;35:965–978.

Craven et al. Ergonomic Deficits in Robotic Gynecologic Oncology Surgery 655
18. Pascual SA, Naqvi S. An investigation of ergonomics analysis tools
used in industry in the identification of work-related musculoskeletal
disorders. Int J Occup Saf Ergon. 2008;14:237–245.
19. McAtamney L, Nigel Corlett E. RULA: a survey method for the investi-
gation ofwork-related upper limbdisorders.ApplErgon. 1993;24:91–99.
20. Moore JS, Garg A. The Strain Index: a proposedmethod to analyze jobs
for risk of distal upper extremity disorders. Am Ind Hyg Assoc J. 1995;
56:443–458.
21. Moore JS, Rucker NP, Knox K. Validity of generic risk factors and the
Strain Index for predicting nontraumatic distal upper extremity morbid-
ity. AIHAJ. 2001;62:229–235.
22. Rucker N, Moore JS. Predictive validity of the Strain Index in
manufacturing facilities. Appl Occup Environ Hyg. 2002;17:63–73.
23. Stephens JP, Vos GA, Stevens EM Jr, Moore JS. Test-retest repeatability
of the Strain Index. Appl Ergon. 2006;37:275–281.
24. Stevens EM Jr, Vos GA, Stephens JP, Moore JS. Inter-rater reliability of
the Strain Index. J Occup Environ Hyg. 2004;1:745–751.
25. Moore JS. Applied Ergonomics: Upper Extremity. Training manual.
Milwaukee, WI: University ofWisconsin–Milwaukee, Center for Ergo-
nomics; 2006.
26. Borg G. Perceived exertion as an indicator of somatic stress. Scand J
Rehabil Med. 1970;2:92–98.
27. Falk V, Diegler A, Walther T, Autschbach R, Mohr FW. Developments
in robotic cardiac surgery. Curr Opin Cardiol. 2000;15:378–387.
28. Lee EC, Rafiq A, Merrell R, Ackerman R, Dennerlein JT. Ergo-
nomics and human factors in endoscopic surgery: a comparison of
manual vs telerobotic simulation systems. Surg Endosc. 2005;19:
1064–1070.
29. Lux MM, Marshall M, Erturk E, Joseph JV. Ergonomic evaluation and
guidelines for use of the da Vinci Robot system. J Endourol. 2010;24:
371–375.
30. Occupational Safety and Health Administration. Available at:
http://www.osha.gov/Publications/laboratory/OSHAfactsheet-laboratory-
safety-ergonomics.pdf. Accessed May 20, 2013.
31. Sillanpaa J, Nyberg M, Laippala P. A new table for work with a micro-
scope, a solution to ergonomic problems.ApplErgon. 2003;34:621–628.
32. James T. An ergonomic approach to modifying microscope design for
increased comfort: a case study. Proceedings of the Human Factors
and Ergonomics Society 39th Annual Meeting; 1995:573–577.
33. Chaffin DB, Andersson GB. Occupational Biomechanics. 2nd ed. New
York: John Wiley & Sons; 1991.
34. Putz-Anderson V. Microscope use. Howard Hughes Medical Institution
Environmental Health and Safety Conference. Washington, DC; 1995
[not published].