
Enriching time series datasets using Nonparametric kernel regression to improve forecasting accuracy
6
Abstract— Improving the accuracy of prediction on future values based on the past and current observations has been pursued by enhancing the prediction’s methods, combining those methods or performing data pre-processing. In this paper, another approach is taken, namely by increasing the number of input in the dataset. This approach would be useful especially for a shorter time series data. By filling the in-between values in the time series, the number of training set can be increased, thus increasing the generalization capability of the predictor. The algorithm used to make prediction is Neural Network as it is widely used in literature for time series tasks. For comparison, Support Vector Regression is also employed. The dataset used in the experiment is the frequency of USPTO’s patents and PubMed’s scientific publications on the field of health, namely on Apnea, Arrhythmia, and Sleep Stages. Another time series data designated for NN3 Competition in the field of transportation is also used for benchmarking. The experimental result shows that the prediction performance can be significantly increased by filling in-between data in the time series. Furthermore, the use of detrend and deseasonalization which separates the data into trend, seasonal and stationary time series also improve the prediction performance both on original and filled dataset. The optimal number of increase on the dataset in this experiment is about five times of the length of original dataset. I. INTRODUCTION HIS Forecasting is the process of making predictions about events whose actual outcomes usually have not yet been observed. Time series problems typically involves task of predicting sequence of future values based on the observed values in the past. Improving the accuracy of prediction on future values based on past and current observations has been pursued by many researchers and elaborated in many literatures in recent years. Several methods proposed to improve the prediction‟s accuracy include data pre-processing, enhancing the prediction‟s methods, and combining those methods. Data pre-processing, which includes de-trending and de-seasonalizing, is usually performed especially for statistical method in which the time series of observations is required to be stationer. In machine learning methods, however, this method is not a mandatory [4, 9]. Some researcher, on the other hand, suggest this method is not even necessary [11, 12, 13]. Related to data pre-processing, is the use of input selection, namely cross-validation, bagging, and boosting that form an ensemble of several predictions [5, 7, 8]. Recently, Phetking et al. [33] propose a method, namely a zigzag based perceptually important point, to reduce noise in time series without losing the nature of financial time series such as uptrends, downtrends, and sideway trends. Meanwhile, several prediction methods have been studied and used in practice. The most common ones are linear methods based on autoregressive models of time series [13, 14]. More advanced approaches apply nonlinear models based mainly on artificial neural networks (NNs), support vector machine (SVM), and other machine learning methods [2, 9, 15, 16]. It is reported that NNs are nonlinear structures, capable of taking into account more complex relations existing among the analyzed data, thus making prediction more accurate [2]. However, it is stated in [15] that NNs may exhibit inconsistent and unpredictable performance on noisy data. In order to predict future values, several consecutive values are required for training data. In some domain, for example in macroeconomic, the time series are usually long enough to decompose such that sufficient training dataset can be obtained. In other domain, however, such as certain technology in patent or scientific publication, the frequency of such technological terms may not be very long. In fact, certain newly growth technology may appear only in the past few years. For this reason, this paper aims to improve the prediction result by increasing the number of dataset. Having longer time series, we may have more training data, which could improve the chance of better prediction. Enriching Time Series Datasets using Nonparametric Kernel Regression to Improve Forecasting Accuracy Agus Widodo, Mohamad Ivan Fanani, and Indra Budi Information Retrieval Laboratory Faculty of Computer Science, University of Indonesia E-mail: [email protected], [email protected], [email protected] T ICACSIS 2011 ISBN: 978-979-1421-11-9 227
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of Enriching time series datasets using Nonparametric kernel regression to improve forecasting accuracy

Abstract— Improving the accuracy of prediction
on future values based on the past and current
observations has been pursued by enhancing the
prediction’s methods, combining those methods or
performing data pre-processing. In this paper,
another approach is taken, namely by increasing
the number of input in the dataset. This approach
would be useful especially for a shorter time series
data. By filling the in-between values in the time
series, the number of training set can be increased,
thus increasing the generalization capability of the
predictor. The algorithm used to make prediction
is Neural Network as it is widely used in literature
for time series tasks. For comparison, Support
Vector Regression is also employed. The dataset
used in the experiment is the frequency of
USPTO’s patents and PubMed’s scientific
publications on the field of health, namely on
Apnea, Arrhythmia, and Sleep Stages. Another
time series data designated for NN3 Competition in
the field of transportation is also used for
benchmarking. The experimental result shows that
the prediction performance can be significantly
increased by filling in-between data in the time
series. Furthermore, the use of detrend and
deseasonalization which separates the data into
trend, seasonal and stationary time series also
improve the prediction performance both on
original and filled dataset. The optimal number of
increase on the dataset in this experiment is about
five times of the length of original dataset.
I. INTRODUCTION
HIS Forecasting is the process of making
predictions about events whose actual outcomes
usually have not yet been observed. Time series
problems typically involves task of predicting
sequence of future values based on the observed
values in the past. Improving the accuracy of
prediction on future values based on past and current
observations has been pursued by many researchers
and elaborated in many literatures in recent years.
Several methods proposed to improve the prediction‟s
accuracy include data pre-processing, enhancing the
prediction‟s methods, and combining those methods.
Data pre-processing, which includes de-trending
and de-seasonalizing, is usually performed especially
for statistical method in which the time series of
observations is required to be stationer. In machine
learning methods, however, this method is not a
mandatory [4, 9]. Some researcher, on the other hand,
suggest this method is not even necessary [11, 12, 13].
Related to data pre-processing, is the use of input
selection, namely cross-validation, bagging, and
boosting that form an ensemble of several predictions
[5, 7, 8]. Recently, Phetking et al. [33] propose a
method, namely a zigzag based perceptually important
point, to reduce noise in time series without losing the
nature of financial time series such as uptrends,
downtrends, and sideway trends.
Meanwhile, several prediction methods have been
studied and used in practice. The most common ones
are linear methods based on autoregressive models of
time series [13, 14]. More advanced approaches apply
nonlinear models based mainly on artificial neural
networks (NNs), support vector machine (SVM), and
other machine learning methods [2, 9, 15, 16]. It is
reported that NNs are nonlinear structures, capable of
taking into account more complex relations existing
among the analyzed data, thus making prediction more
accurate [2]. However, it is stated in [15] that NNs
may exhibit inconsistent and unpredictable
performance on noisy data.
In order to predict future values, several
consecutive values are required for training data. In
some domain, for example in macroeconomic, the
time series are usually long enough to decompose
such that sufficient training dataset can be obtained. In
other domain, however, such as certain technology in
patent or scientific publication, the frequency of such
technological terms may not be very long. In fact,
certain newly growth technology may appear only in
the past few years.
For this reason, this paper aims to improve the
prediction result by increasing the number of dataset.
Having longer time series, we may have more training
data, which could improve the chance of better
prediction.
Enriching Time Series Datasets using Nonparametric
Kernel Regression to Improve Forecasting Accuracy
Agus Widodo, Mohamad Ivan Fanani, and Indra Budi
Information Retrieval Laboratory
Faculty of Computer Science, University of Indonesia
E-mail: [email protected], [email protected], [email protected]
T
ICACSIS 2011 ISBN: 978-979-1421-11-9
227

II. LITERATURE REVIEW
The effect of generating additional training data
have studied by several researchers such as by adding
noises to the input data on neural network modeling
and generalization performance. Several literature
concludes that that adding noises into the training
patterns may improve neural network generalization
[21,22,23]. Bishop [24] indicates that training with
more dataset is approximately equivalent to a form of
the regularization technique. In addition, [25]
conducts a rigorous analysis of how the various types
of noise affect the learning cost function for both
regression and classification problems. He
demonstrates that input noise is effective in improving
the generalization performance. Zhang [20] also adds
noises to the input data and reports that proposed
method is able to consistently outperform the single
modeling approach with a variety of time series
processes. He uses several methods to generate the
noise, namely Autoregressive, ARMA, Bilinear
process, Nonlinear autoregressive and smooth
transition autoregressive.
Meanwhile, the Kernel Parametric Regression for
time series is applied by Li and Tkacz [26] to select
weights in a forecast-combining regression. They
propose nonparametric kernel regression time-varying
weighting approach to allow the form of the weight
function to be determined by the forecast errors,
which should allow maximum flexibility in situations
of structural change of unknown form.
In addition, Auestad and Tjostheim [27] use a
kernel estimator to estimate the k-step ahead
prediction in time series using the Nadaraya-Watson
estimator. Chen and Hafner [28] also propose krenel
regression for prediction using multistage kernel
smoother, which includes the current prediction to
predict the next values. Thus, the work in [27] is
similar to direct method and the latter is similar to
iterative approach in [1].
Meanwhile, Shang and Hyndman [29] present a
nonparametric method to forecast a seasonal time
series, and propose dynamic updating methods,
namely the block moving, ordinary least squares,
penalized least squares, and ridge regression, to
improve point forecast accuracy.
In this paper, instead of using Kernel Parametric
Regression to forecast future values, it is used to
predict the the neighboring values. Non-parametric
method is very dependent on the adjacent data, thus,
we assume that this mothod is more appropriate to
compute in-between values in time series rather than
predicting some consecutive values in the futures.
Thus, the novelty of this paper is the use of
Nonparametric Kernel Regression to lengthen the time
series which in turns may increase the prediction
accuracy.
III. THEORETICAL BACKGROUND
A. Time Series Analysis
As stated in [4], a time series is sequence of
observations in which each observation xt is recorded a
particular time t. A time series of length t can be
represented as a sequence of X=[x1,x2,...,xt]. Multi-
step-ahead forecasting is the task of predicting a
sequence of h future values, 𝑋𝑡+1𝑡+ , given its p past
observations, 𝑋𝑡−𝑝+1𝑡 , where the notation 𝑋𝑡−𝑝
𝑡 denotes
a segment of the time series [xt-p,xt-p+1,...,xt].
Time series methods for forecasting are based on
analysis of historical data assuming that past patterns
in data can be used to forecast future data points [17].
When there are trend and seasonal factors in the data
series, those factors shall be removed first, and
computed separately, in order to correctly compute the
forecast. De-trend and de-seasonalize time-series to
separate base from trend and seasonality effects can be
done by this exponential smoothing, as stated in [18]:
𝐵𝑡 = 𝛼𝐷𝑡
𝑆𝑡−𝑚+ 1 − 𝛼 (𝐵𝑡−1 + 𝑇𝑡−1)
𝑇𝑡 = 𝛽 𝐵𝑡 − 𝐵𝑡−1 + (1 − 𝛽)𝑇𝑡−1
𝑆𝑡 = 𝛾𝐷𝑡
𝐵𝑡+ (1− 𝛾)𝑆𝑡−𝑚
where equation (1) is used to smooth the base forecast
Bt, equation (2) to smooth the trend forecast Tt, and
equation (3) to smooth the seasonality forecast St.
Meanwhile, α, β, and γ are the degree of importance of
the current data compared to the previous ones,
whereas subscript t and m denotes the current time
and seasonal period. The forecast of the next k period
using exponential smoothing with trend and
seasonality can be calculated by:
𝐹𝑡+𝑘 = (𝐵𝑡−1 + 𝑘𝑇𝑡−1)𝑆𝑡+𝑘−𝑚
Furthermore, the multi-step-ahead prediction task of
time series can be achieved by either explicitly
training a direct model to predict several steps ahead,
or by doing repeated one-step ahead predictions up to
the desired horizon. The former is often called as
direct method, whereas the latter is often called as
iterative method.
The iterative approach is used and the model is
trained on a one-step-ahead basis in [1]. After training,
the model is used to forecast one step ahead, such as
one week ahead. Then the forecasted value is used as
an input for the model to forecast the subsequent
point. In the direct approach, a different network is
used for each future point to be forecasted. In
addition, a parallel approach is also discussed in [1]. It
consists of one network with a number of outputs
equal to the length of the horizon to be forecasted. The
network is trained in such a way that output number k
produces the k-step-ahead forecast. However, it was
reported that this approach did not perform well
compared to the two previous methods.
ICACSIS 2011 ISBN: 978-979-1421-11-9
228
B. Non-parametric Kernel Regression
Non-parametric Kernel Regression which is also
sometimes related to the smoothing methods, typically
requires three phases, namely (1) a fitting step to find
the best combine of model type, kernel function, and
bandwidth, using a test sample, (2) a validation phase
that allows to validate the model on new observations
for which the prediction is known, and (3) an
application phase, where the model is applied to a new
set of data for which the prediction is unknown.
Fernandez and Cao [31] indicate that Nonparametric
regression estimation has several advantages over
classical parametric methods. It is a more flexible
approach and can be very well adapted to local
features in time series. Usual non-parametric
estimators of m(u) are of the general form:
𝑚 𝑢 = 𝑊(𝑢, 𝑥𝑗 )𝑦𝑗𝑛𝑗=1
where W(u,xj) are some smoothing positive weights
with high values if u is close to xj and valuse close to
zero otherwise. The shape of the weight function
W(u,xj) is often referred as kernel, which is a
continuous, bounded, and symmetric real function
which integrates to one. The form of weight has been
proposed by Nadaraya-Watson as
𝑊(𝑢, 𝑥𝑗 ) =𝐾 (𝑥𝑗−𝑢)
𝐾 (𝑥𝑖−𝑢)𝑛𝑖=1
where h is the bandwidth. As stated in [32], a very
large bandwidth will result in an oversmooth curve,
whereas small bandwith will reproduce the data.
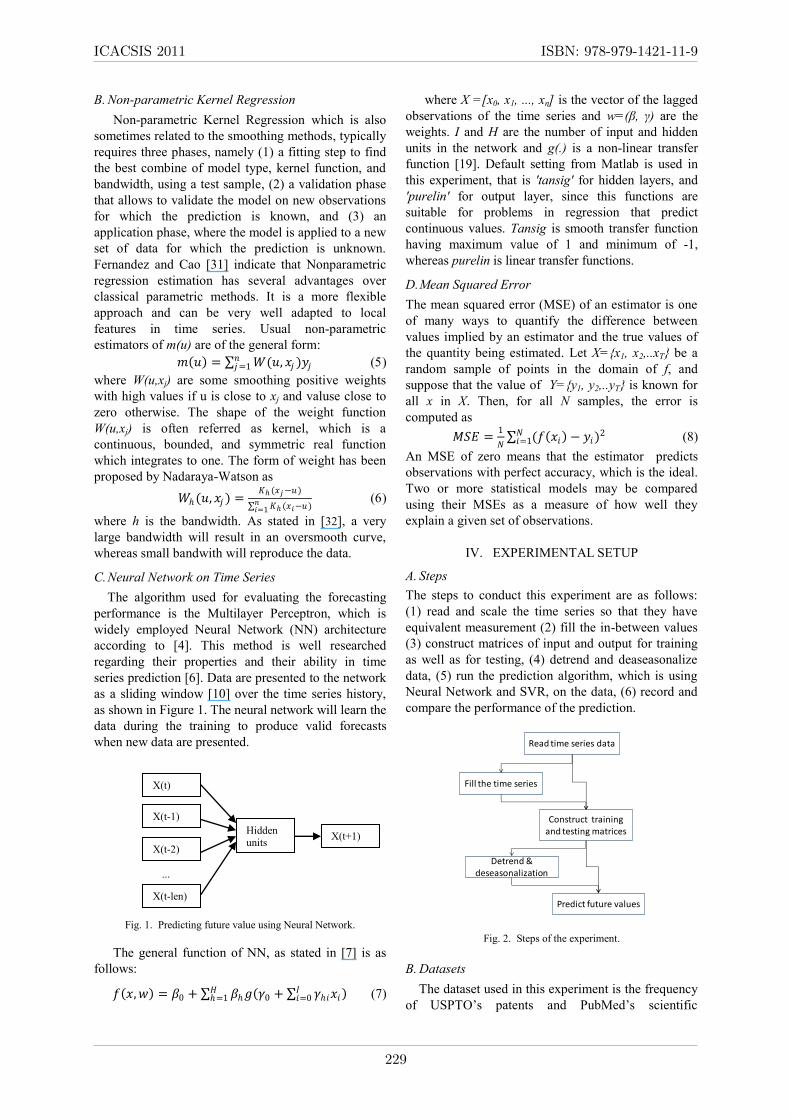
C. Neural Network on Time Series
The algorithm used for evaluating the forecasting
performance is the Multilayer Perceptron, which is
widely employed Neural Network (NN) architecture
according to [4]. This method is well researched
regarding their properties and their ability in time
series prediction [6]. Data are presented to the network
as a sliding window [10] over the time series history,
as shown in Figure 1. The neural network will learn the
data during the training to produce valid forecasts
when new data are presented.
Fig. 1. Predicting future value using Neural Network.
The general function of NN, as stated in [7] is as
follows:
𝑓 𝑥,𝑤 = 𝛽0 + 𝛽𝑔 𝛾0 + 𝛾𝑖𝑥𝑖𝐼𝑖=0 𝐻
=1 (7)
where X =[x0, x1, ..., xn] is the vector of the lagged
observations of the time series and w=(β, γ) are the
weights. I and H are the number of input and hidden
units in the network and g(.) is a non-linear transfer
function [19]. Default setting from Matlab is used in
this experiment, that is 'tansig' for hidden layers, and
'purelin' for output layer, since this functions are
suitable for problems in regression that predict
continuous values. Tansig is smooth transfer function
having maximum value of 1 and minimum of -1,
whereas purelin is linear transfer functions.
D. Mean Squared Error
The mean squared error (MSE) of an estimator is one
of many ways to quantify the difference between
values implied by an estimator and the true values of
the quantity being estimated. Let X={x1, x2,..xT} be a
random sample of points in the domain of f, and
suppose that the value of Y={y1, y2,..yT} is known for
all x in X. Then, for all N samples, the error is
computed as
𝑀𝑆𝐸 =1
𝑁 (𝑓 𝑥𝑖 − 𝑦𝑖)
2𝑁𝑖=1 (8)
An MSE of zero means that the estimator predicts
observations with perfect accuracy, which is the ideal.
Two or more statistical models may be compared
using their MSEs as a measure of how well they
explain a given set of observations.
IV. EXPERIMENTAL SETUP
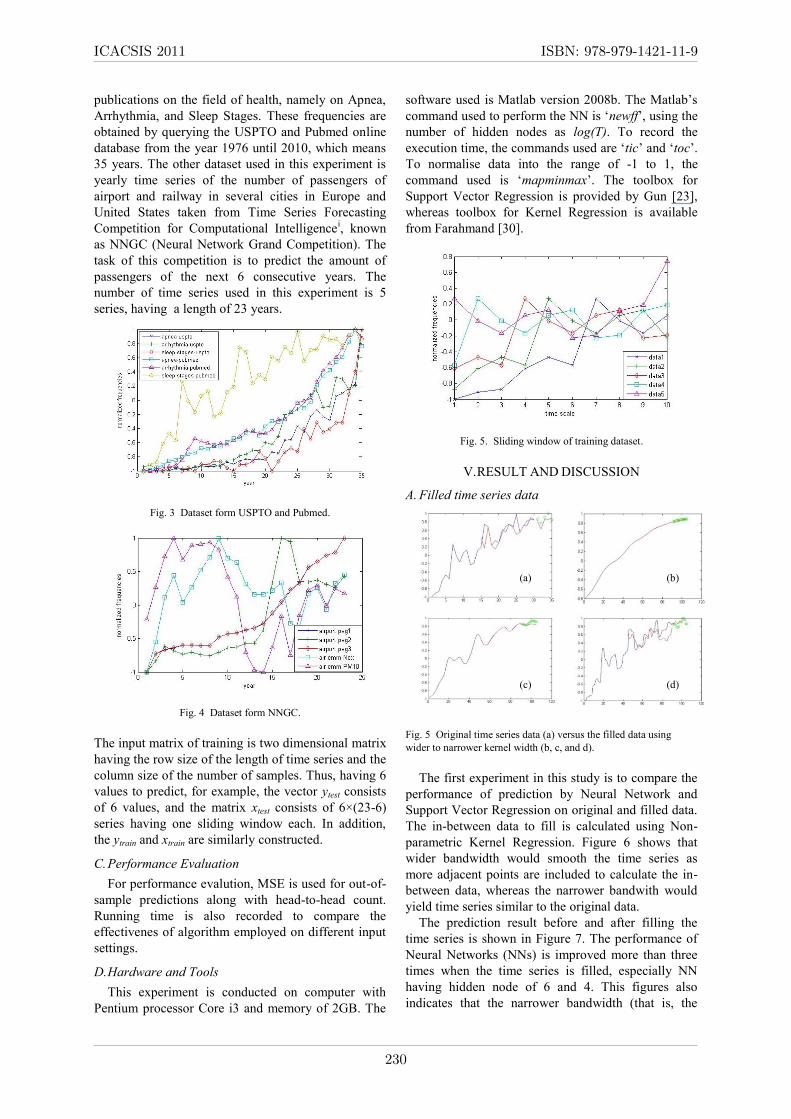
A. Steps
The steps to conduct this experiment are as follows:
(1) read and scale the time series so that they have
equivalent measurement (2) fill the in-between values
(3) construct matrices of input and output for training
as well as for testing, (4) detrend and deaseasonalize
data, (5) run the prediction algorithm, which is using
Neural Network and SVR, on the data, (6) record and
compare the performance of the prediction.
Fig. 2. Steps of the experiment.
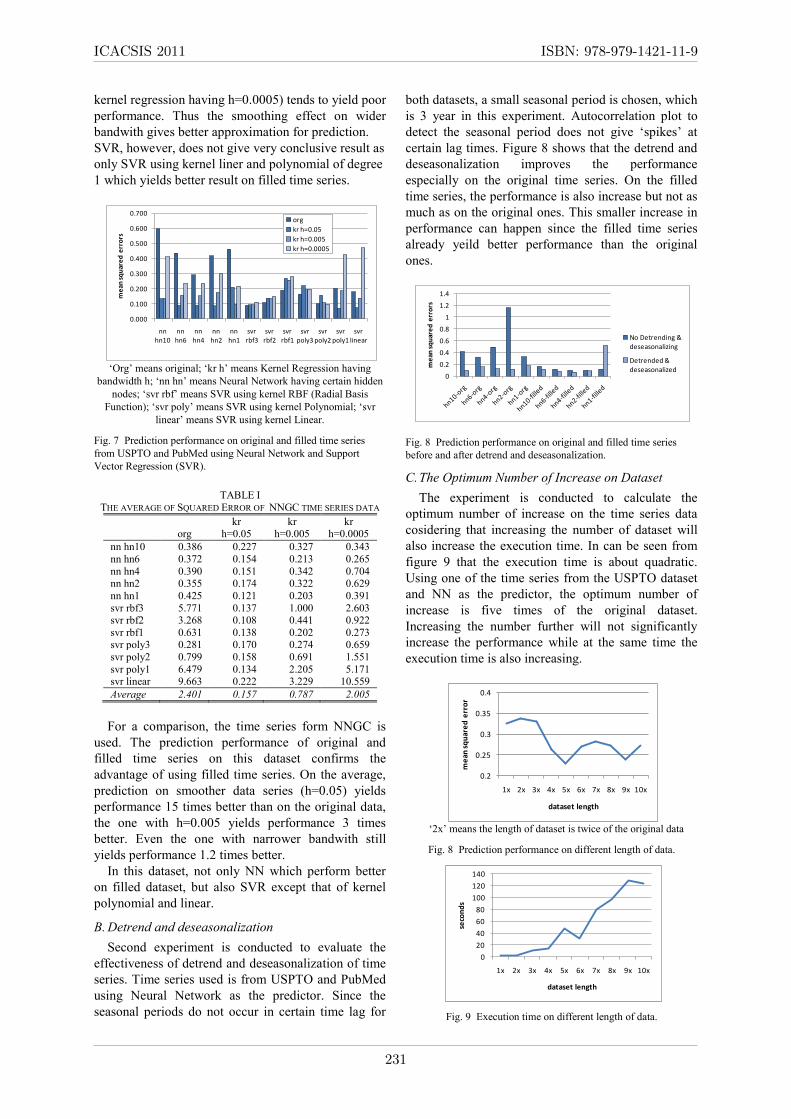
B. Datasets
The dataset used in this experiment is the frequency
of USPTO‟s patents and PubMed‟s scientific
Read time series data
Fill the time series
Construct training and testing matrices
Predict future values
Detrend & deseasonalization
X(t)
X(t-1)
Hidden
units X(t-2)
X(t+1)
...
X(t-len)
ICACSIS 2011 ISBN: 978-979-1421-11-9
229
publications on the field of health, namely on Apnea,
Arrhythmia, and Sleep Stages. These frequencies are
obtained by querying the USPTO and Pubmed online
database from the year 1976 until 2010, which means
35 years. The other dataset used in this experiment is
yearly time series of the number of passengers of
airport and railway in several cities in Europe and
United States taken from Time Series Forecasting
Competition for Computational Intelligencei, known
as NNGC (Neural Network Grand Competition). The
task of this competition is to predict the amount of
passengers of the next 6 consecutive years. The
number of time series used in this experiment is 5
series, having a length of 23 years.
Fig. 3 Dataset form USPTO and Pubmed.
Fig. 4 Dataset form NNGC.
The input matrix of training is two dimensional matrix
having the row size of the length of time series and the
column size of the number of samples. Thus, having 6
values to predict, for example, the vector ytest consists
of 6 values, and the matrix xtest consists of 6×(23-6)
series having one sliding window each. In addition,
the ytrain and xtrain are similarly constructed.
C. Performance Evaluation
For performance evalution, MSE is used for out-of-
sample predictions along with head-to-head count.
Running time is also recorded to compare the
effectivenes of algorithm employed on different input
settings.
D. Hardware and Tools
This experiment is conducted on computer with
Pentium processor Core i3 and memory of 2GB. The
software used is Matlab version 2008b. The Matlab‟s
command used to perform the NN is „newff‟, using the
number of hidden nodes as log(T). To record the
execution time, the commands used are „tic‟ and „toc‟.
To normalise data into the range of -1 to 1, the
command used is „mapminmax‟. The toolbox for
Support Vector Regression is provided by Gun [23],
whereas toolbox for Kernel Regression is available
from Farahmand [30].
Fig. 5. Sliding window of training dataset.
V. RESULT AND DISCUSSION
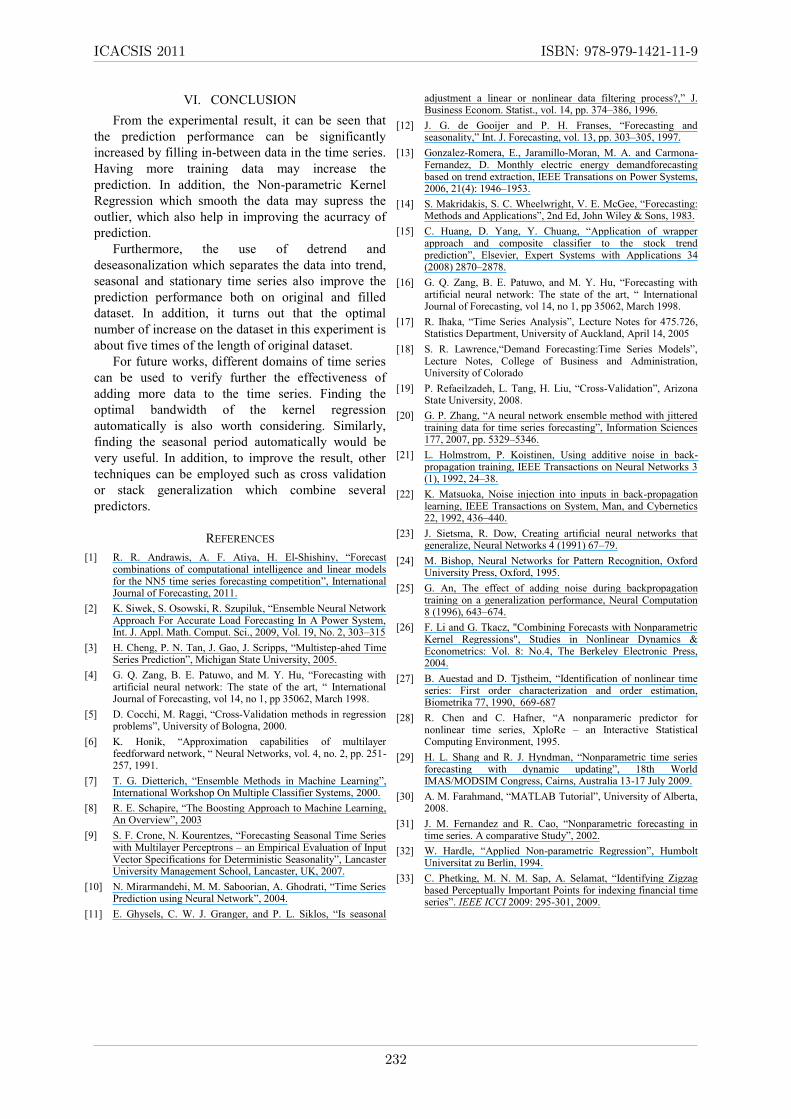
A. Filled time series data
Fig. 5 Original time series data (a) versus the filled data using
wider to narrower kernel width (b, c, and d).
The first experiment in this study is to compare the
performance of prediction by Neural Network and
Support Vector Regression on original and filled data.
The in-between data to fill is calculated using Non-
parametric Kernel Regression. Figure 6 shows that
wider bandwidth would smooth the time series as
more adjacent points are included to calculate the in-
between data, whereas the narrower bandwith would
yield time series similar to the original data.
The prediction result before and after filling the
time series is shown in Figure 7. The performance of
Neural Networks (NNs) is improved more than three
times when the time series is filled, especially NN
having hidden node of 6 and 4. This figures also
indicates that the narrower bandwidth (that is, the
(a) (b)
(c) (d)
ICACSIS 2011 ISBN: 978-979-1421-11-9
230
kernel regression having h=0.0005) tends to yield poor
performance. Thus the smoothing effect on wider
bandwith gives better approximation for prediction.
SVR, however, does not give very conclusive result as
only SVR using kernel liner and polynomial of degree
1 which yields better result on filled time series.
„Org‟ means original; „kr h‟ means Kernel Regression having
bandwidth h; „nn hn‟ means Neural Network having certain hidden
nodes; „svr rbf‟ means SVR using kernel RBF (Radial Basis
Function); „svr poly‟ means SVR using kernel Polynomial; „svr
linear‟ means SVR using kernel Linear.
Fig. 7 Prediction performance on original and filled time series
from USPTO and PubMed using Neural Network and Support
Vector Regression (SVR).
TABLE I
THE AVERAGE OF SQUARED ERROR OF NNGC TIME SERIES DATA
org kr
h=0.05 kr
h=0.005 kr
h=0.0005
nn hn10 0.386 0.227 0.327 0.343
nn hn6 0.372 0.154 0.213 0.265
nn hn4 0.390 0.151 0.342 0.704 nn hn2 0.355 0.174 0.322 0.629
nn hn1 0.425 0.121 0.203 0.391
svr rbf3 5.771 0.137 1.000 2.603 svr rbf2 3.268 0.108 0.441 0.922
svr rbf1 0.631 0.138 0.202 0.273 svr poly3 0.281 0.170 0.274 0.659
svr poly2 0.799 0.158 0.691 1.551
svr poly1 6.479 0.134 2.205 5.171 svr linear 9.663 0.222 3.229 10.559
Average 2.401 0.157 0.787 2.005
For a comparison, the time series form NNGC is
used. The prediction performance of original and
filled time series on this dataset confirms the
advantage of using filled time series. On the average,
prediction on smoother data series (h=0.05) yields
performance 15 times better than on the original data,
the one with h=0.005 yields performance 3 times
better. Even the one with narrower bandwith still
yields performance 1.2 times better.
In this dataset, not only NN which perform better
on filled dataset, but also SVR except that of kernel
polynomial and linear.
B. Detrend and deseasonalization
Second experiment is conducted to evaluate the
effectiveness of detrend and deseasonalization of time
series. Time series used is from USPTO and PubMed
using Neural Network as the predictor. Since the
seasonal periods do not occur in certain time lag for
both datasets, a small seasonal period is chosen, which
is 3 year in this experiment. Autocorrelation plot to
detect the seasonal period does not give „spikes‟ at
certain lag times. Figure 8 shows that the detrend and
deseasonalization improves the performance
especially on the original time series. On the filled
time series, the performance is also increase but not as
much as on the original ones. This smaller increase in
performance can happen since the filled time series
already yeild better performance than the original
ones.
Fig. 8 Prediction performance on original and filled time series
before and after detrend and deseasonalization.
C. The Optimum Number of Increase on Dataset
The experiment is conducted to calculate the
optimum number of increase on the time series data
cosidering that increasing the number of dataset will
also increase the execution time. In can be seen from
figure 9 that the execution time is about quadratic.
Using one of the time series from the USPTO dataset
and NN as the predictor, the optimum number of
increase is five times of the original dataset.
Increasing the number further will not significantly
increase the performance while at the same time the
execution time is also increasing.
„2x‟ means the length of dataset is twice of the original data
Fig. 8 Prediction performance on different length of data.
Fig. 9 Execution time on different length of data.
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
nn hn10
nn hn6
nn hn4
nn hn2
nn hn1
svr rbf3
svr rbf2
svr rbf1
svr poly3
svr poly2
svr poly1
svr linear
me
an s
qu
are
d e
rro
rs
org
kr h=0.05
kr h=0.005
kr h=0.0005
0
0.2
0.4
0.6
0.8
1
1.2
1.4
me
an s
qu
are
d e
rro
rs
No Detrending & deseasonalizing
Detrended & deseasonalized
0.2
0.25
0.3
0.35
0.4
1x 2x 3x 4x 5x 6x 7x 8x 9x 10x
me
an s
qu
are
d e
rro
r
dataset length
0
20
40
60
80
100
120
140
1x 2x 3x 4x 5x 6x 7x 8x 9x 10x
seco
nd
s
dataset length
ICACSIS 2011 ISBN: 978-979-1421-11-9
231
VI. CONCLUSION
From the experimental result, it can be seen that
the prediction performance can be significantly
increased by filling in-between data in the time series.
Having more training data may increase the
prediction. In addition, the Non-parametric Kernel
Regression which smooth the data may supress the
outlier, which also help in improving the acurracy of
prediction.
Furthermore, the use of detrend and
deseasonalization which separates the data into trend,
seasonal and stationary time series also improve the
prediction performance both on original and filled
dataset. In addition, it turns out that the optimal
number of increase on the dataset in this experiment is
about five times of the length of original dataset.
For future works, different domains of time series
can be used to verify further the effectiveness of
adding more data to the time series. Finding the
optimal bandwidth of the kernel regression
automatically is also worth considering. Similarly,
finding the seasonal period automatically would be
very useful. In addition, to improve the result, other
techniques can be employed such as cross validation
or stack generalization which combine several
predictors.
REFERENCES
[1] R. R. Andrawis, A. F. Atiya, H. El-Shishiny, “Forecast combinations of computational intelligence and linear models for the NN5 time series forecasting competition”, International Journal of Forecasting, 2011.
[2] K. Siwek, S. Osowski, R. Szupiluk, “Ensemble Neural Network Approach For Accurate Load Forecasting In A Power System, Int. J. Appl. Math. Comput. Sci., 2009, Vol. 19, No. 2, 303–315
[3] H. Cheng, P. N. Tan, J. Gao, J. Scripps, “Multistep-ahed Time Series Prediction”, Michigan State University, 2005.
[4] G. Q. Zang, B. E. Patuwo, and M. Y. Hu, “Forecasting with artificial neural network: The state of the art, “ International Journal of Forecasting, vol 14, no 1, pp 35062, March 1998.
[5] D. Cocchi, M. Raggi, “Cross-Validation methods in regression problems”, University of Bologna, 2000.
[6] K. Honik, “Approximation capabilities of multilayer feedforward network, “ Neural Networks, vol. 4, no. 2, pp. 251-257, 1991.
[7] T. G. Dietterich, “Ensemble Methods in Machine Learning”, International Workshop On Multiple Classifier Systems, 2000.
[8] R. E. Schapire, “The Boosting Approach to Machine Learning, An Overview”, 2003
[9] S. F. Crone, N. Kourentzes, “Forecasting Seasonal Time Series with Multilayer Perceptrons – an Empirical Evaluation of Input Vector Specifications for Deterministic Seasonality”, Lancaster University Management School, Lancaster, UK, 2007.
[10] N. Mirarmandehi, M. M. Saboorian, A. Ghodrati, “Time Series Prediction using Neural Network”, 2004.
[11] E. Ghysels, C. W. J. Granger, and P. L. Siklos, “Is seasonal
adjustment a linear or nonlinear data filtering process?,” J. Business Econom. Statist., vol. 14, pp. 374–386, 1996.
[12] J. G. de Gooijer and P. H. Franses, “Forecasting and seasonality,” Int. J. Forecasting, vol. 13, pp. 303–305, 1997.
[13] Gonzalez-Romera, E., Jaramillo-Moran, M. A. and Carmona-Fernandez, D. Monthly electric energy demandforecasting based on trend extraction, IEEE Transations on Power Systems, 2006, 21(4): 1946–1953.
[14] S. Makridakis, S. C. Wheelwright, V. E. McGee, “Forecasting: Methods and Applications”, 2nd Ed, John Wiley & Sons, 1983.
[15] C. Huang, D. Yang, Y. Chuang, “Application of wrapper approach and composite classifier to the stock trend prediction”, Elsevier, Expert Systems with Applications 34 (2008) 2870–2878.
[16] G. Q. Zang, B. E. Patuwo, and M. Y. Hu, “Forecasting with artificial neural network: The state of the art, “ International Journal of Forecasting, vol 14, no 1, pp 35062, March 1998.
[17] R. Ihaka, “Time Series Analysis”, Lecture Notes for 475.726, Statistics Department, University of Auckland, April 14, 2005
[18] S. R. Lawrence,“Demand Forecasting:Time Series Models”, Lecture Notes, College of Business and Administration, University of Colorado
[19] P. Refaeilzadeh, L. Tang, H. Liu, “Cross-Validation”, Arizona State University, 2008.
[20] G. P. Zhang, “A neural network ensemble method with jittered training data for time series forecasting”, Information Sciences 177, 2007, pp. 5329–5346.
[21] L. Holmstrom, P. Koistinen, Using additive noise in back-propagation training, IEEE Transactions on Neural Networks 3 (1), 1992, 24–38.
[22] K. Matsuoka, Noise injection into inputs in back-propagation learning, IEEE Transactions on System, Man, and Cybernetics 22, 1992, 436–440.
[23] J. Sietsma, R. Dow, Creating artificial neural networks that generalize, Neural Networks 4 (1991) 67–79.
[24] M. Bishop, Neural Networks for Pattern Recognition, Oxford University Press, Oxford, 1995.
[25] G. An, The effect of adding noise during backpropagation training on a generalization performance, Neural Computation 8 (1996), 643–674.
[26] F. Li and G. Tkacz, "Combining Forecasts with Nonparametric Kernel Regressions", Studies in Nonlinear Dynamics & Econometrics: Vol. 8: No.4, The Berkeley Electronic Press, 2004.
[27] B. Auestad and D. Tjstheim, “Identification of nonlinear time series: First order characterization and order estimation, Biometrika 77, 1990, 669-687
[28] R. Chen and C. Hafner, “A nonparameric predictor for nonlinear time series, XploRe – an Interactive Statistical Computing Environment, 1995.
[29] H. L. Shang and R. J. Hyndman, “Nonparametric time series forecasting with dynamic updating”, 18th World IMAS/MODSIM Congress, Cairns, Australia 13-17 July 2009.
[30] A. M. Farahmand, “MATLAB Tutorial”, University of Alberta, 2008.
[31] J. M. Fernandez and R. Cao, “Nonparametric forecasting in time series. A comparative Study”, 2002.
[32] W. Hardle, “Applied Non-parametric Regression”, Humbolt Universitat zu Berlin, 1994.
[33] C. Phetking, M. N. M. Sap, A. Selamat, “Identifying Zigzag based Perceptually Important Points for indexing financial time series”. IEEE ICCI 2009: 295-301, 2009.
ICACSIS 2011 ISBN: 978-979-1421-11-9
232




















