EF-MPR, a new energy eFficient multi-point relay selection algorithm for MANET
18
J Supercomput (2012) 59:744–761 DOI 10.1007/s11227-010-0470-7 EF-MPR, a new energy eFficient multi-point relay selection algorithm for MANET Hassan Chizari · Majid Hosseini · Shaharuddin Salleh · Shukor Abd Razak · Abdul Hanan Abdullah Published online: 20 August 2010 © Springer Science+Business Media, LLC 2010 Abstract MultiPoint Relay (MPR) selection algorithm is a flooding technique for propagating a broadcast message inside an ad-hoc network which reduces the number of unnecessary broadcast messages in order to save more energy in the network, minimize the number of packet collisions, and speed up the propagation time. In this paper, we demonstrate that MPR selection is an application of Set Covering Problem (SCP). A few optimization methods are developed in this work to find the optimum solution including Simulated Annealing (SA), Tabu Search (TS), Genetic Algorithm (GA), and a new greedy algorithm. Extensive simulations are set up to evaluate the developed methods. The new algorithm is named Energy eFficient MPR or EF-MPR in short. The simulation results show that EF-MPR can reduce the number of MPR nodes up to 19%. Moreover, EF-MPR algorithm reduces the power-consumption of network up to 12% and speed up the propagation time by 9%. This work is funded by Malaysian Ministry of Science, Technology, and Innovation (MOSTI) under project number 79262. H. Chizari · M. Hosseini · S.A. Razak · A.H. Abdullah Faculty of Computer Science and Information System, Universiti Teknologi Malaysia, Johor 81300, Malaysia H. Chizari e-mail: [email protected] M. Hosseini e-mail: [email protected] S.A. Razak e-mail: [email protected] A.H. Abdullah e-mail: [email protected] S. Salleh ( ) Department of Mathematics, Faculty of Science, Universiti Teknologi Malaysia, Jokor 81300, Malaysia e-mail: [email protected]
Transcript of EF-MPR, a new energy eFficient multi-point relay selection algorithm for MANET

J Supercomput (2012) 59:744–761DOI 10.1007/s11227-010-0470-7
EF-MPR, a new energy eFficient multi-point relayselection algorithm for MANET
Hassan Chizari · Majid Hosseini ·Shaharuddin Salleh · Shukor Abd Razak ·Abdul Hanan Abdullah
Published online: 20 August 2010© Springer Science+Business Media, LLC 2010
Abstract MultiPoint Relay (MPR) selection algorithm is a flooding technique forpropagating a broadcast message inside an ad-hoc network which reduces the numberof unnecessary broadcast messages in order to save more energy in the network,minimize the number of packet collisions, and speed up the propagation time. In thispaper, we demonstrate that MPR selection is an application of Set Covering Problem(SCP). A few optimization methods are developed in this work to find the optimumsolution including Simulated Annealing (SA), Tabu Search (TS), Genetic Algorithm(GA), and a new greedy algorithm. Extensive simulations are set up to evaluate thedeveloped methods. The new algorithm is named Energy eFficient MPR or EF-MPRin short. The simulation results show that EF-MPR can reduce the number of MPRnodes up to 19%. Moreover, EF-MPR algorithm reduces the power-consumption ofnetwork up to 12% and speed up the propagation time by 9%.
This work is funded by Malaysian Ministry of Science, Technology, and Innovation (MOSTI) underproject number 79262.
H. Chizari · M. Hosseini · S.A. Razak · A.H. AbdullahFaculty of Computer Science and Information System, Universiti Teknologi Malaysia, Johor 81300,Malaysia
H. Chizarie-mail: [email protected]
M. Hosseinie-mail: [email protected]
S.A. Razake-mail: [email protected]
A.H. Abdullahe-mail: [email protected]
S. Salleh (�)Department of Mathematics, Faculty of Science, Universiti Teknologi Malaysia, Jokor 81300,Malaysiae-mail: [email protected]
EF-MPR, a new energy eFficient multi-point relay selection 745
Keywords Genetic algorithms · Mobile ad hoc network · Multipoint relay ·Optimization · Simulated annealing · Tabu search
1 Introduction
A flooding technique for propagating a broadcast message inside an ad-hoc network.Flooding technique is a propagation for a broadcast message inside the network.
Flooding is a fundamental concept in Mobile Ad-hoc NETwork (MANET) and ithas different applications like routing, path finding, and event notification in ad-hocnetworks. In MANET’s flooding mechanism, there are two factors that have to beconsidered.
First, number of packets: It is important to consider the number of packets tobe disseminated through a complete flooding procedure. A large number of packetscould increase power consumption of mobile nodes and increases network trafficbecause of packet collisions. Second, the propagation speed: The total time of onecomplete flooding procedure throughout the network is also a significant contributorto the efficiency of the network. As the nodes are mobile, the network topology maychange during the flooding stage which causes the collected information via floodingfor such path finding and event notification less efficient.
The normal flooding method is blind flooding [1] in which all nodes retransmit thereceived packet. This is the most inefficient flooding method since it creates many un-necessary messages. In contrast to blind flooding, many optimized flooding methodshave been proposed by limiting the number of rebroadcaster nodes. They could bedivided to sender-based and receiver-based methods. In sender-based methods, whena node transmits a packet, it selects the rebroadcaster nodes among its first neighbors.In receiver-based method, when a node receives a broadcast message, it decides byitself to whether or not to rebroadcast the packet.
In this paper, we focus on MultiPoint Relay (MPR) [2] selection algorithm whichis a sender-based method and is used as the core of OLSR routing algorithm. Wefirst show that MPR is an application of infamous optimization problem named SetCovering Problem (SCP) and categorized as NP-Hard problem [3]. The representedsolution by [2] for MPR was based on the proposed algorithm by [4] for SCP. Since[4], many solutions have been proposed for SCP where some of them are based on op-timization algorithms like Genetic Algorithm (GA), Simulated Annealing (SA), andTabu Search (TS). Based on the existing research, these optimization techniques pro-duce good results on SCP [5, 6]. One obvious issue is whether or not these proposedsolutions for SCP can be applied in MPR selection. In this work, a new fitness func-tion for GA, SA, and TS is proposed and these algorithms are tested and comparedto the original MPR algorithm. Moreover, a new Energy eFficient MPR (EF-MPR)as a heuristic greedy algorithm is proposed. It is shown that the new heuristic greedyalgorithm (EF-MPR) can achieve better results in terms of number of MPR nodeswhich causes better energy efficiency and less propagation time.
This paper is organized as follows: In Sect. 2, we briefly describe the MultiPointrelay selection problem. Section 3 discusses the definition of Set Covering Problem
746 H. Chizari et al.
(SCP) and the MPR problem is mapped to Unicost SCP. Three solutions using opti-mization methods (GA, SA, and TS) are explained in Sect. 4 along with their para-meters including chromosome design and fitness function. The EF-MPR algorithm isintroduced in Sect. 5 which is based on a new greedy algorithm. The simulation sce-nario and the obtained results are discussed in Sect. 6. Finally, the paper is concludedwith few suggestions and future works in Sect. 7.
2 MultiPoint relay selection
The concept of “MultiPoint Relaying“ is to decrease the number of redundant re-transmissions in packet broadcasting [2]. It is a technique to limit blind flooding [1]by selecting a subset of nodes to retransmit the received packets. This small subsetof nodes, called MultiPoint Relays, are in one-hop distance of a particular node. Thegoal is transferring the broadcast message from a node to its second-hop nodes bydecreasing the number of rebroadcasts in the one-hop distance nodes (MPRs). As abasic goal, MPR set should be able to cover all the nodes through the network, whichmeans each packet has to be received by all the nodes in the network in a same wayas blind flooding.
As the MPR algorithm is sender-based flooding strategy, the knowledge of one-hop and two-hop neighbors are crucial for determining MPRs set. Therefore, somekind of HELLO message is designed that the nodes disseminate them locally andcollect the information of first-hop neighbors. In terms of mobile networks, thesemessages have been sent periodically as keep-alive signals to refresh the informationin [2].
The heuristic greedy algorithm for node n proposed by [2] is presented in Algo-rithm 1.
Algorithm 1 MPR selection algorithm1: MPR(n) ← ∅2: N(n) ← one-hop neighbors from node n
3: N2(n) ← second-hop neighbors reachable by N(n) nodes4: while There is any uncovered node in N2(n) by MPR(n) do5: For all N(n) /∈ MPR(n) compute the number of covered nodes among uncov-
ered nodes in the N2(n)
6: Add a node from N(n) to MPR(n) which has the maximum number of coverednodes in the N2(n)
7: end while
MultiPoint Relay selection mechanism is a distributed technique where each nodeselects its own MPR set among its one-hop neighbors, independent of what have beenselected by other nodes. The MultiPoint Relay selection algorithm should have twoadvantages: easy to implement and produces near optimal MPR sets in the majorityof the cases [2].

EF-MPR, a new energy eFficient multi-point relay selection 747
Several work have been proposed to improve the MPR selection mechanism andreduce the broadcast flooding. The authors in [7] proposed an algorithm to predictMPR nodes. Each individual node checks both previous and predicted MPR to ob-tain a reliable communication. In such manner, the deleted one-hop record and theassociated two-hop records must be buffered for a distinct time interval. Therefore,the algorithm might not work properly in terms of memory and energy-consumptionwhen the network is dense and the mobility is high.
The algorithm which is used by the original MPR mechanism usually choosesthe farthest nodes from the selectors as the forwarding nodes (also called the bordernodes). Due to the movement, the possibility that a MPR node gets out of the selectortransmission range is high. In [8], the authors proposed a broadcasting scheme calledDynamic Power-aware and Stability-aware MultiPoint Relays (DPS-MPR) that pre-vents the border nodes from becoming MPR nodes. Moreover, they also suggest re-ducing the transmission range of nodes to save energy. In addition, their work uses arange buffer in order to further enhancing the stability of the forwarding nodes. Sim-ilar to [7], [8] tries to choose more stable nodes as MPRs and predict the mobilityin different way. Therefore, their approach needs more memory space to buffer therange to enhance the stability.
The work in [9] utilizes the idea of Link Duration (LD) criterion as mobility met-ric for selecting MPRs. LD represents the link duration when a node is in the trans-mission range of another distinct node. This work has employed a different sort ofmobility metrics and choose the nodes as MPRs which have less mobility similar to[7] and [8]. Contrary to the aforementioned methods, [10] concentrated on Qualityof Service metrics. They manipulated the Local Available Bandwidth (LAB) of eachnode as a QoS parameter which could be measured locally at MAC layers. This mea-surement could be derived from QoS parameters values given by the MAC driver ifthey are available. The available bandwidth is disseminated locally via HELLO mes-sages and globally by topology control (TC) messages [10]. They sort all one hopneighbors in a descending order of QoS parameters in first step and employ the MPRalgorithm to choose the MPRs. Furthermore, [11] employed Maximal IndependentSet (MIS) concept to choose more independent connected dominating set and theyform gateways while MPRs will be selected among these nodes based on the originalMPR selection algorithm. Obviously, the existing works concentrated mostly on im-proving the MPR selection mechanism by considering different parameters while themain selection algorithm remains same. Contradictory to the existing work, we de-veloped a new energy-efficient MPR selection mechanism by proposing a new MPRalgorithm (EF-MPR) which can improve the MPR algorithm itself.
3 MPR as a unicost SCP
Set Covering Problem (SCP) is an infamous optimization problem which has manyapplications in different areas. Various usages for SCP could be found, especially inad-hoc networks. For instance, one of the proposed solution for flooding in ad-hocnetworks is MultiPoint Relay (MPR) which is based on SCP [2]. The MPR solutionfor Set Covering Problem back to [12] and its method is presented in Algorithm 2.
748 H. Chizari et al.
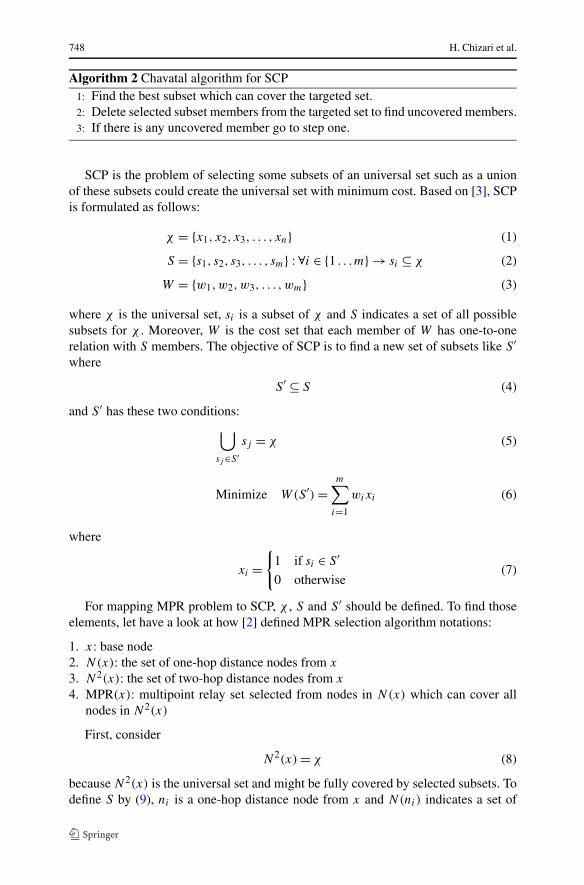
Algorithm 2 Chavatal algorithm for SCP1: Find the best subset which can cover the targeted set.2: Delete selected subset members from the targeted set to find uncovered members.3: If there is any uncovered member go to step one.
SCP is the problem of selecting some subsets of an universal set such as a unionof these subsets could create the universal set with minimum cost. Based on [3], SCPis formulated as follows:
χ = {x1, x2, x3, . . . , xn} (1)
S = {s1, s2, s3, . . . , sm} : ∀i ∈ {1 . . .m} → si ⊆ χ (2)
W = {w1,w2,w3, . . . ,wm} (3)
where χ is the universal set, si is a subset of χ and S indicates a set of all possiblesubsets for χ . Moreover, W is the cost set that each member of W has one-to-onerelation with S members. The objective of SCP is to find a new set of subsets like S′where
S′ ⊆ S (4)
and S′ has these two conditions:⋃
sj ∈S′sj = χ (5)
Minimize W(S′) =m∑
i=1
wixi (6)
where
xi ={
1 if si ∈ S′
0 otherwise(7)
For mapping MPR problem to SCP, χ , S and S′ should be defined. To find thoseelements, let have a look at how [2] defined MPR selection algorithm notations:
1. x: base node2. N(x): the set of one-hop distance nodes from x
3. N2(x): the set of two-hop distance nodes from x
4. MPR(x): multipoint relay set selected from nodes in N(x) which can cover allnodes in N2(x)
First, consider
N2(x) = χ (8)
because N2(x) is the universal set and might be fully covered by selected subsets. Todefine S by (9), ni is a one-hop distance node from x and N(ni) indicates a set of

EF-MPR, a new energy eFficient multi-point relay selection 749
nodes that has one hop distance to ni
N(x) = {n1, n2, n3, . . . , nm} (9)
This set N(ni) could be divided to three separated sets:
– Ni : two hop distance nodes from x reachable by ni
– Ni(x): one hop distance nodes from both x and ni
– x: it is in one hop distance from ni
Ni is derivable as follows:
Ni = (N(ni) − Ni(x)
) − x (10)
and because it contains some of the two-hop distance nodes to x, we have
Ni ⊆ N2(x) (11)
We now define N1(x), or the set of all possible subsets, as follows:
N1(x) = {N1,N2,N3, . . . ,Nm} (12)
N1(x) is the set of Ni subsets (12). In other words, Ni is equal to S in SCP. Thetargeted set in MultiPoint Relay algorithm is MPR(x) which is equivalent to S′, andthus based on (4)
MPR(x) ⊆ N1(x) (13)⋃
Ni∈MPR(x)
Ni = N2(x) (14)
Consequently, the goal is to find the MPR(x) set while the union of all its subsetsis equal to universal set χ (14). So, the objective function for MPR is
Minimize W(MPR(x)
) =m∑
i=1
wixi (15)
where
xi ={
1 if Ni ∈ MPR(x)
0 otherwise(16)
The main difference between SCP and MPR is that there is no weight function forselecting Ni sets. Thus, a new weight function is created whose value is always one,as follows:
∀mi=1wi : wi = 1 (17)
With this definition, the MultiPoint Relay algorithm is a SCP application withweight function value of one. In other words, MPR is the Unicost Set CoveringProblem that the cost for selecting all nodes in Ni set is equal. However, in someresearches, despite of original MPR definition, the weight functions for MPR weredefined as the willingness to forward data [7], power [8], and stability [9].

750 H. Chizari et al.
4 Optimization algorithms
Although MPR is based on the Unicost Set Covering Problem (USCP), it has twomain characteristics. First, the MPR algorithm has to be run in mobile ad-hoc nodes.So, there are some limitations in terms of memory and CPU usage. Second, becausethe nodes are in the move, the algorithm run-time is more important than its optimal-ity. Based on these two features, the proposed optimization methods have to be asfast as possible.
In this section, the general experimented optimization methods with their designand algorithms are discussed. In the first part, the way that information is stored in thecomputer memory and the proposed fitness function are described. Then the proposedparameters for each optimization algorithm are shown separately.
4.1 Encoding a solution
Optimization algorithms are usually based on iterative methods to converge to theirsolutions. A solution to an optimization algorithm can be stored in the node memorybut there is limitation on memory capacity in mobile ad-hoc network devices. Totackle this restriction, a bit-wise representation of a solution is employed. In thisdesign, each bit indicates a one-hop neighbor and its value shows whether it is inMPR set or not. Therefore, the size of a bit-wise encoded solution is equal to thenumber of one-hop distance neighbors. For example, memory space for a node with50 one-hop neighbors is 50 bits. In the simulation practice, the size increases up to300 neighbors which is still small in terms of memory usage. This encoding schemeis used for all experimented optimization algorithms (MPR, GA, SA, TS, and EF-MPR).
4.2 Fitness function
A fitness function ranks the encoded solution and shows its optimality. By expressingthe original MPR selection operator, we propose a new fitness function. We defineCMPR as the union of all second hop nodes reachable by selected one-hop nodes inMPR(x) list
CMPR =⋃
Ni∈MPR(x)
Ni (18)
So, the base condition for having a MPR set is
CMPR = N2(x) (19)
for a given subset MPR(x) which can satisfy (19) the fitness value is
Fitness = #MPR(x) (20)
where # indicates the size of a set.When the solution that appears in encoded representation could cover all the nodes
in N2(x) set, (19) can be applied. There are two ways for ranking the solutions which

EF-MPR, a new energy eFficient multi-point relay selection 751
could not cover the N2(x) set. First, we propose assigning a general high cost value toall of them for the optimization method to converge toward good solutions. This is thesimpler tactic, while they may loss those uncovered solutions that are close to optimalsolutions in their patterns. The second way is to define a penalty function for rankingthe solutions to distinguish those which have the possibility of generating good resultsin the subsequent iterations. This penalty function is defined as the number of nodesin N2(x), which are not still covered by MPR(x), to be added with a constant andmake this cost higher than those which can cover N2(x). The complete formula is asfollows:
Fitness ={
#MPR(x) CMPR(x) = N2(x)
M + #(N2(x) − CMPR) CMPR(x) = N2(x)(21)
where M is one unit more than the maximum possible value for the biggest possibleMPR set. From (13)
M = #N1(x) + 1 (22)
Equation (21) is our strategy used to rank the results for all experimented algorithms.
4.3 Genetic algorithm
Genetic algorithm is a type of evolutionary algorithm that works as a global parallelsearch method. The algorithm starts with some random solutions. Then evolutionaryoperators such as recombination, mutation and selection generate a new population totake place of the previous ones. Genetic algorithm is well known for solving variousNP-Hard optimization problems as well as SCP. Thus, many different implementa-tions of genetic algorithm exist for solving set covering problem. [13] tested com-putational ability of GA to solve various SCPs and had very good results that showsGA could reach to near optimal solution for SCP. [14] used normal GA with specialpenalty function that could find good answers to SCP and [15] used Parallel GeneticAlgorithm with separated population to improve normal GA.
To ensure the produced result by GA could cover all second neighbor nodes as in(19), there is a chromosome (c1) in the starting population with this shape:
∀ni ∈ N(x) → ni ∈ c1 (23)
c1 gets less fitness value, as it covers all its second hop neighbors according to (21),compared to other chromosomes which may not cover their such neighbors. So, wehave at least one chromosome which has full coverage on the population. Althoughthe fitness value of this chromosome is lower than all other chromosomes withoutcoverage, selection operator could not guarantee to choose it for next population. So,the elite operator is used to transfer the lowest fitness chromosome(s) to the next pop-ulation directly. So, we can make sure that the best chromosome in the last populationcould cover all second neighbor nodes.
To implement GA, two different parameter settings are defined as in Table 1. Inthe first setting, GA has enough time with large population of chromosomes to obtaina good result. In the second setting, GA only has the same time as our proposed

752 H. Chizari et al.
Table 1 Genetic algorithm parameters
Operator Selected model (slow) Selected model (fast)
Starting point Random solution including one specific chromosome
Population number 50 20
Iteration number 200 20
Elite count 2 1
Crossover Scattered Scattered
Fraction size 0.3 0.3
Selection Tournament Tournament
Mutation Adaptive feasible Adaptive feasible
algorithm (EF-MPR) to find the solution because the speed of algorithm is moreimportant than its accuracy since network topology varies quickly in mobile ad-hocnetworks. The parameters for these two settings have been chosen heuristically basedon different experiments to find out the optimized ones.
4.4 Tabu search
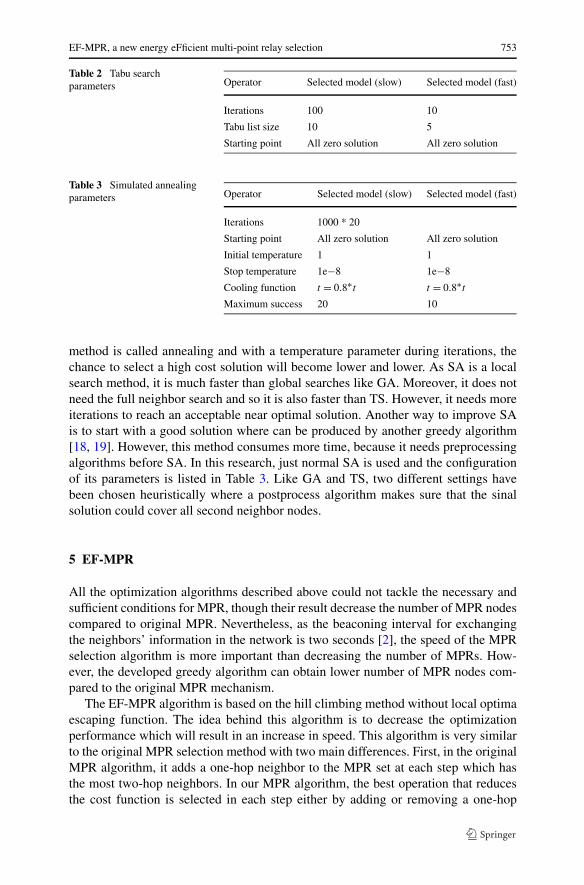
Tabu Search (TS) is a local search engine based on hill climbing theory [16]. It startsthe search from one point instead of a population of random solutions like GA. Ineach iteration, TS checks all possible neighbors of the current solution to find the bestone. Moreover, to escape from local optima, it generates a Tabu list to prevent the se-lection of the previously selected solutions. However, the Tabu list is usually limitedto a fixed size determined heuristically. TS is a popular algorithm for optimizationproblems and it could reach to the near optimal solution faster using a larger mem-ory. In some cases, TS may be aggregated with other heuristics to reach better results.Guturu and Dantu [5] combined GA as a global search with TS to search for betterresults in each GA iteration. In [17], TS was used to look for near optimal solution.The starting point is a list of subsets where all of them are not selected. In each stepwith one operation (add or remove), the best possible solution will be found and se-lected. A Tabu list is also exist to prevent from oscillation among some good resultsand to escape from local optima. Like our configuration for GA, two different settingsof parameters are used in TS as in Table 2. One setting is to find a good solution andthe second one is to find a solution as fast as our proposed algorithm (EF-MPR). Theparameters have been chosen heuristically based on different experiments. To makesure that proposed solution by Tabu could cover all second neighbors, a postprocess-ing algorithm is run over the solution. It is the same as original MPR algorithm andit will add some other first neighbor nodes to the solution to promise its coverage.
4.5 Simulated annealing
Simulated Annealing (SA) is a hill climbing greedy algorithm that searches neighborsfor a solution iteratively to optimize the overall solution. However, despite of hillclimbing, SA uses a probability method to escape from local optima. This probability
EF-MPR, a new energy eFficient multi-point relay selection 753
Table 2 Tabu searchparameters Operator Selected model (slow) Selected model (fast)
Iterations 100 10
Tabu list size 10 5
Starting point All zero solution All zero solution
Table 3 Simulated annealingparameters Operator Selected model (slow) Selected model (fast)
Iterations 1000 * 20
Starting point All zero solution All zero solution
Initial temperature 1 1
Stop temperature 1e−8 1e−8
Cooling function t = 0.8∗t t = 0.8∗t
Maximum success 20 10
method is called annealing and with a temperature parameter during iterations, thechance to select a high cost solution will become lower and lower. As SA is a localsearch method, it is much faster than global searches like GA. Moreover, it does notneed the full neighbor search and so it is also faster than TS. However, it needs moreiterations to reach an acceptable near optimal solution. Another way to improve SAis to start with a good solution where can be produced by another greedy algorithm[18, 19]. However, this method consumes more time, because it needs preprocessingalgorithms before SA. In this research, just normal SA is used and the configurationof its parameters is listed in Table 3. Like GA and TS, two different settings havebeen chosen heuristically where a postprocess algorithm makes sure that the sinalsolution could cover all second neighbor nodes.
5 EF-MPR
All the optimization algorithms described above could not tackle the necessary andsufficient conditions for MPR, though their result decrease the number of MPR nodescompared to original MPR. Nevertheless, as the beaconing interval for exchangingthe neighbors’ information in the network is two seconds [2], the speed of the MPRselection algorithm is more important than decreasing the number of MPRs. How-ever, the developed greedy algorithm can obtain lower number of MPR nodes com-pared to the original MPR mechanism.
The EF-MPR algorithm is based on the hill climbing method without local optimaescaping function. The idea behind this algorithm is to decrease the optimizationperformance which will result in an increase in speed. This algorithm is very similarto the original MPR selection method with two main differences. First, in the originalMPR algorithm, it adds a one-hop neighbor to the MPR set at each step which hasthe most two-hop neighbors. In our MPR algorithm, the best operation that reducesthe cost function is selected in each step either by adding or removing a one-hop

754 H. Chizari et al.
neighbor to MPR set. Second, original MPR tries to cover all the two-hop neighborswhile in EF-MPR there is a fitness function that pushes the algorithm to decrease thenumber of MPRs more. The complete pseudo code for algorithm is summarized asAlgorithm 3:
Algorithm 3 EF-MPR algorithm1: Selected_Sol ← [ 0 0 . . . 0 ]2: Selected_Fit ← Fitness(Selected_Sol)3: repeat4: Alternates_Sol ← Find_Alternates(Selected_Sol)5: Alternates_Fit ← Fitness(Alternates_Sol)6: Min_Index ← Find_Minimum(Alternates_Fit)7: if Alternates_Fit[Min_Index] < Selected_Fit then8: Selected_Sol ← Alternates_Sol[Min_Index]9: Selected_Fit ← Alternates_Fit[Min_Index]
10: end if11: until Selected_Sol not changed
The algorithm starts with an all-zero set as its initial solution, which means noone-hop neighbor is selected (e.g., r = {0,0,0,0,0}). In the EF-MPR loop, theFind_Alternates function creates a list of all possible sets which differs from inputset just in one member (24)
∀rai → #(r − rai) = 1 (24)
where rai indicates all possible alternative sets. For example, if r = {0,1,1,0,0},then ra1 and ra2 are two possible alternatives from five available alternatives wherera1 = {1,0,1,1,0} and ra2 = {0,0,1,0,0}.
The next step in the EF-MPR algorithm is to find the best set (lowest fitness value)among these new generated solutions which this set will be used for the followingiteration. The algorithm stops when there is no better alternative set than the selectedsolution.
One main condition for this algorithm is to select MPR nodes in such a way all thesecond neighbor nodes could be covered by MPRs as in (19). To check this, considerthat there is a solution with no alternatives better than itself where this solution couldnot cover all second neighbors. So, we have
CR(x) = N2(x) (25)
∀Rai → Fitness(R(x)
) ≤ Fitness(Rai(x)
)(26)
where R(x) is the solution and Rai are alternative solutions. Because R(x) could notcover N2(x), from (9), we have
∃nk,nk /∈ R(x) → CR(x) < CR(x)∪nk(27)

EF-MPR, a new energy eFficient multi-point relay selection 755
Rak = R(x) ∪ nk (28)
Fitness(R(x)
)> Fitness
(Rak(x)
)(29)
Equation (29) is opposite to (26) which means R(x) has better alternative solution.The algorithm will not stop at this point and recursively continues the work to coverall second neighbors.
6 Simulation and results
In this research, two different simulators are used for different evaluation setups.In the first step, all the optimization algorithms (MPR, GA, TS, SA, and EF-MPR)are tested in MATLAB. In the next step, both the original MPR and EF-MPR areexperimented in NS2 for comparing their performance, energy usage and speed. Bothof these steps are described below.
6.1 MATLAB
MATLAB’s powerful mathematical libraries and optimization toolboxes have beenmanipulated. The original MPR method [2], GA, TS, SA and the EF-MPR algorithmare implemented in MATLAB.
The network environment is considered as a 500 × 500 square area and nodesare distributed randomly. Different number of nodes are tested to experiment thealgorithms performance in dense and scattered areas. The nodes’ transmission modelused in this research is boolean [20] including:
p(x) ={
1, x ≤ R
0, x > R(30)
There are some assumptions in the simulation environment as follows:
– The transmission range for all nodes are the same.– There is no transmission error among nodes.– All the links are symmetric (Bidirectional).– The mobility of nodes are ignored during sending HELLO packets.– There is no obstacle in the network area.– Transmission range is 100 meter and number of nodes vary from 100 to 1000.
The main goal in the MATLAB simulation is to compare the different heuristicmethods in terms of total operational cost (i.e., time and number MPRs). In the firststep, the ability of different algorithms for reducing the number of selected nodes asMPRs is discovered. In this test, the setting for slow algorithm running time is chosenfor GA, TS, and SA as provided in Tables 1, 2, and 3. As the results shown in Table 4,the value in each cell of table represents the average number of MPR nodes in thepresented network. The smaller number indicates the less MPR nodes. According tothis table, TS and EF-MPR algorithms obtained the best results. Furthermore, Table 5shows the number of MPR nodes reduction in terms of percentages compared to the

756 H. Chizari et al.
Table 4 Average number of MPR nodes (slow setting for algorithms)
Number of nodes 100 200 300 400 500 600 700 800 900
MPR 2.99 3.59 3.75 3.91 4.13 4.39 4.47 4.64 4.58
Genetic algorithm 2.81 3.28 3.42 3.62 3.79 3.96 3.97 4.01 3.91
Tabu search 2.70 3.17 3.25 3.39 3.54 3.74 3.77 3.80 3.67
Simulated annealing 2.86 3.39 3.52 3.69 3.97 4.00 4.03 5.99 9.13
EF-MPR 2.72 3.17 3.29 3.40 3.55 3.75 3.77 3.80 3.67
Table 5 MPR nodes reduction percentage (slow setting for algorithms)
Number of nodes 100 200 300 400 500 600 700 800 900
Genetic algorithm 6.02 8.77 8.79 7.43 8.14 9.90 11.10 13.65 14.61
Tabu search 9.70 11.84 13.32 13.25 14.24 14.95 15.70 18.23 19.85
Simulated annealing 4.35 5.71 6.22 5.44 3.87 9.03 9.82 −28.97 −99.37
EF-MPR 9.03 11.84 12.43 12.93 13.95 14.61 15.54 18.15 19.85
Table 6 Average running time (slow setting for algorithms)
Number of nodes 100 200 300 400 500 600 700 800 900
MPR 0.00 0.00 0.00 0.00 0.01 0.01 0.01 0.01 0.02
Genetic algorithm 12.63 11.11 11.54 13.00 17.70 22.28 22.46 30.87 43.80
Tabu search 0.26 0.71 1.53 2.52 5.38 8.51 11.31 17.64 26.96
Simulated annealing 0.55 0.63 0.77 0.86 1.33 1.72 1.86 2.72 3.82
EF-MPR 0.01 0.02 0.06 0.10 0.23 0.40 0.55 0.94 1.47
original method. It is clear that the improvement of the EF-MPR and TS are almostthe same in all different stages.
Apart from the performance evaluation, Table 6 represents the average of the totaltime for each individual node to find its MPRs set and broadcast it through the net-work. Based on this table, despite the good improvement of the node reduction viagenetic algorithm and Tabu Search, those methods are very slow and they cannot sat-isfy desirable time. Whereas the proposed EF-MPR produced very reasonable timecompared to the original MPR.
As the second step, the GA, TS and SA are forced to execute in the same time asEF-MPR by changing their parameters as in Tables 1, 2, and 3. As the result shownin Table 7, GA, TS, and SA could not achieve to their optimum results where therunning time is restricted to a low value. However, as previously shown in Table 5,EF-MPR provides up to 19% reduction in number of MPRs compared to originalMPR algorithm.

EF-MPR, a new energy eFficient multi-point relay selection 757
Table 7 MPR nodes reduction percentage (fast setting for algorithms)
Number 100 200 300 400 500 600 700 800 900
of nodes
Genetic −250.00 −678.86 −1072.03 −1512.17 −1933.65 −2317.83 −2744.10 −3161.50 −3670.53
algorithm
Tabu 7.79 11.14 −63.72 −192.09 −285.17 −479.26 −572.78 −700.03 −720.43
search
Simulated 2.60 3.71 −18.10 −46.45 −216.61 −394.01 −690.40 −1072.62 −1327.92
annealing
EF-MPR 7.79 12.14 11.60 12.29 13.66 15.26 16.14 18.30 19.83
Table 8 NS2 node’sspecifications Parameter Value
Channel Wireless channel
Propagation Two ray ground
Mac layer 802.11
Antenna Omni antenna
Table 9 NS2 wirelesscommunication characteristics Parameter Value
CP threshold 10.0
CS threshold 2.78869e−9
RX threshold 2.78869e−9
Bandwidth rate 1e6
Transmission power 0.281838
Frequency 2.4e+9
Transmission range 100 m
6.2 NS2
Network Simulator 2 (NS2) is originally developed for simulating wired net-works [21]. However, NS2 is widely used for wireless simulation and specificallyin MANET since the wireless extension was provided by [22]. In this step, MPR andEF-MPR are tested in NS2 in terms of optimizing the number of selected nodes asMPRs, network energy usage during the propagation of a broadcast message, andthe propagation time. The simulation is setup based on the node characteristics andtelecommunication parameters are as shown in Tables 8 and 9.
In NS2, two different scenarios are tested. At first, different number of nodes (from100 nodes to 1000 nodes) in the network area are randomly deployed. The transmis-sion range is assumed 100 meters and the network size is 500 m×500 m. The periodicHELLO packets among nodes are exchanged and the MPR sets is calculated for eachnode using both the original and EF-MPR selection algorithms. The simulation was

758 H. Chizari et al.
Table 10 Number of MPRs selected by both methods in NS2
Number of Total number of MPRs Number of MPRs per node Improvement
nodes MPR EF-MPR MPR EF-MPR percentage
100 35251 31284 3.53 3.13 11.25
200 95839 85624 4.79 4.28 10.66
300 167560 147820 5.59 4.93 11.78
400 247687 216802 6.19 5.42 12.47
500 332638 290711 6.65 5.81 12.60
600 425040 368417 7.08 6.14 13.32
700 520541 452073 7.44 6.46 13.15
800 621318 538015 7.77 6.73 13.41
900 729774 624547 8.11 6.94 14.42
1000 836296 717487 8.36 7.17 14.21
Table 11 Energy modelspecifications Initial energy (Joules) 15
Transmission power (Watt) 1.4
Receiving power (Watt) 1.0
Idle power (Watt) 0.0
repeated 100 times for each scenario and the average of the results are presented inTable 10. This step only tests the ability of EF-MPR selection algorithm in terms ofdecreasing the number of selected nodes as MPRs in contrast to the original MPRselection algorithm. As shown in Table 10, the EF-MPR algorithm has always betterresults than original MPR with minimum value of 10.66%. Moreover, the perfor-mance of the proposed algorithm increases up to 14.21% in dense networks.
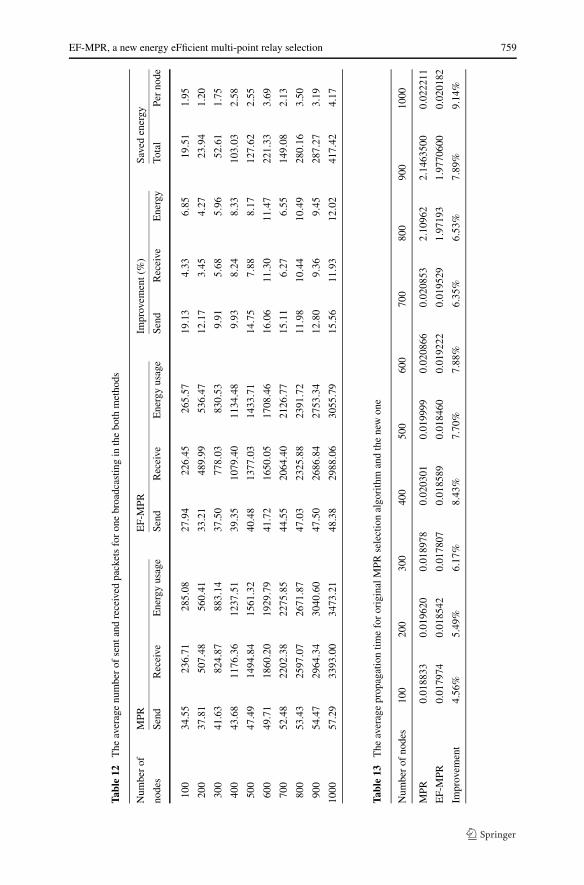
In the second step, the energy usage and time of flooding propagation are exam-ined through different size of networks. In this test, when one node sends a broadcastmessage, the number of sent and received packets by all other nodes are countedthrough the network. The energy usage model is proposed by [23] and it is shownin Table 11. Moreover, each node announce its time after receiving the broadcastmessage and the last announcement is recorded as the broadcast propagation time.
This practice is repeated where all nodes could be considered as the starting pointfor a broadcast message and the average results are given in Tables 12 and 13.
As shown in Table 12, the number of sends and receives as well as the energy usageare decreased in the EF-MPR selection algorithm and it saves more energy (from6.85% to 12.02%) when the density of network increases. The saved energy of eachnode is presented in the last column. Although this value is not high, the repetitionof broadcasting in MANET will multiply this number to a high factor which makesit considerable.
EF-MPR selection algorithm will also decrease the propagation time. The broad-casting time is the minimum time that all nodes receive broadcast message. Sincenodes in MANET are mobile, the speed of broadcasting could be very important. InTable 13, the average broadcasting time values are presented. Furthermore, the new
EF-MPR, a new energy eFficient multi-point relay selection 759
Tabl
e12
The
aver
age
num
ber
ofse
ntan
dre
ceiv
edpa
cket
sfo
ron
ebr
oadc
astin
gin
the
both
met
hods
Num
ber
ofM
PRE
F-M
PRIm
prov
emen
t(%
)Sa
ved
ener
gy
node
sSe
ndR
ecei
veE
nerg
yus
age
Send
Rec
eive
Ene
rgy
usag
eSe
ndR
ecei
veE
nerg
yTo
tal
Per
node
100
34.5
523
6.71
285.
0827
.94
226.
4526
5.57
19.1
34.
336.
8519
.51
1.95
200
37.8
150
7.48
560.
4133
.21
489.
9953
6.47
12.1
73.
454.
2723
.94
1.20
300
41.6
382
4.87
883.
1437
.50
778.
0383
0.53
9.91
5.68
5.96
52.6
11.
75
400
43.6
811
76.3
612
37.5
139
.35
1079
.40
1134
.48
9.93
8.24
8.33
103.
032.
58
500
47.4
914
94.8
415
61.3
240
.48
1377
.03
1433
.71
14.7
57.
888.
1712
7.62
2.55
600
49.7
118
60.2
019
29.7
941
.72
1650
.05
1708
.46
16.0
611
.30
11.4
722
1.33
3.69
700
52.4
822
02.3
822
75.8
544
.55
2064
.40
2126
.77
15.1
16.
276.
5514
9.08
2.13
800
53.4
325
97.0
726
71.8
747
.03
2325
.88
2391
.72
11.9
810
.44
10.4
928
0.16
3.50
900
54.4
729
64.3
430
40.6
047
.50
2686
.84
2753
.34
12.8
09.
369.
4528
7.27
3.19
1000
57.2
933
93.0
034
73.2
148
.38
2988
.06
3055
.79
15.5
611
.93
12.0
241
7.42
4.17
Tabl
e13
The
aver
age
prop
agat
ion
time
for
orig
inal
MPR
sele
ctio
nal
gori
thm
and
the
new
one
Num
ber
ofno
des
100
200
300
400
500
600
700
800
900
1000
MPR
0.01
8833
0.01
9620
0.01
8978
0.02
0301
0.01
9999
0.02
0866
0.02
0853
2.10
962
2.14
6350
00.
0222
11
EF-
MPR
0.01
7974
0.01
8542
0.01
7807
0.01
8589
0.01
8460
0.01
9222
0.01
9529
1.97
193
1.97
7060
00.
0201
82
Impr
ovem
ent
4.56
%5.
49%
6.17
%8.
43%
7.70
%7.
88%
6.35
%6.
53%
7.89
%9.
14%

760 H. Chizari et al.
EF-MPR selection algorithm could reduce the broadcasting time from 4.56% up to9.14% based on the node density as shown in Table 13.
7 Conclusion
In this paper, first we showed that MPR is an application of Set Covering Problem(SCP). Then followed by our experiment of implementing proposed solutions forSCP in MPR has indicated that although these algorithms have good results, theirspeed to calculate the MPR set is not suitable for MANET. We also proposed a newMPR selection algorithm named EF-MPR that gave from the minimum of 10% up to19% improvement in terms of the number of MPRs required which could reduce boththe flooding energy usage from 6% to 12% and flooding propagation time from 4% to9%. All the experiments showed that it has better results in more dense environment.EF-MPR also has reasonable speed which makes it practical in real world implemen-tation. Our future work will be implementing the EF-MPR with OLSR algorithm andexperimenting the algorithm performance in a real testbed environment.
References
1. Tseng Y-C, Ni S-Y, Chen Y-S, Sheu J-P (2002) The broadcast storm problem in a mobile ad hocnetwork. Wirel Netw 8(2/3):153–167
2. Qayyum A, Viennot L, Laouiti A (2000) Multipoint relaying: an efficient technique for flooding inmobile wireless networks. Technical Report, Institu National de Recherche en Informatique et enAutomatique
3. Gonzalez TF (ed) (2007) Handbook of approximation algorithms and metaheuristics. Chapman andHall/CRC Press, London/Boca Raton
4. Chavatal V (1979) A greedy heuristic for the set-covering problem. Math Oper Res 4(3):2335. Guturu P, Dantu R (2008) An impatient evolutionary algorithm with probabilistic tabu search for
unified solution of some np-hard problems in graph and set theory via clique finding. IEEE Trans SystMan Cybern B 38(3):645–666
6. Chiang CC, Dai HK (2005) On the minimum-cost set-covering problem. In: Proceedings of the2005 international conference on parallel and distributed processing techniques and applications,PDPTA’05, vol 3, pp 1199–1205
7. Khan AY, Rashid S, Iqbal A (2005) Mobility vs predictive MPR selection for mobile ad hoc networksusing OLSR. In: Proceedings—IEEE 2005 international conference on emerging technologies, ICET2005, vol 2005, pp 52–57
8. Chang Y-K, Ting Y-W, Wu S-C (2007) Power-efficient and path-stable broadcasting scheme for wire-less ad hoc networks. In: Proceedings—21st international conference on advanced information net-working and applications workshops/symposia, AINAW’07, vol 1, pp 707–712
9. Yawut C, Paillassa B, Dhaou R (2007) Mobility versus density metric for OLSR enhancement. Lecturenotes in computer science, vol 4866, pp 2–17. Springer, Berlin
10. Nguyen D, Minet P (2007) Analysis of MPR selection in the OLSR protocol. In: Ainaw ’07: Pro-ceedings of the 21st international conference on advanced information networking and applicationsworkshops, Washington, DC, USA. IEEE Comput. Soc., Los Alamitos, pp 887–892
11. Liang O, Sekercioglu YA, Mani N (2006) Gateway multipoint relays-an MPR-based broadcast al-gorithm for ad hoc networks. In: 10th IEEE Singapore international conference on communicationsystems, 2006 ICCS 2006, pp. 1–6, 30 Nov 2006
12. Johnson DS (1973) Approximation algorithms for combinatorial problems. In: STOC ’73: Proceed-ings of the 5th annual ACM symposium on theory of computing, New York, USA. ACM, New York,pp 38–49
EF-MPR, a new energy eFficient multi-point relay selection 761
13. Lorena L, de Souza Lopes L (1997) Genetic algorithms applied to computationally difficult set cov-ering problems. J Oper Res Soc 48(4):440–445
14. Huang W-C, Kao C-Y, Horng J-T (1994) Genetic algorithm approach for set covering problems. IEEEConf Evol Comput Proc 2:569–574
15. Solar M, Parada V, Urrutia R (2002) A parallel genetic algorithm to solve the set-covering problem.Comput Oper Res 29(9):1221–1235
16. Glover F, Laguna F (1997) Tabu search. Kluwer Academic, Boston17. Musliu N (2006) Local search algorithm for unicost set covering problem. Lecture notes in computer
science (including subseries Lecture notes in artificial intelligence and lecture notes in bioinformat-ics), vol 4031, pp 302–311. Springer, Berlin
18. Brusco MJ, Jacobs LW, Thompson GM (1996) A morphing procedure to supplement a simulatedannealing heuristic for cost- and coverage-correlated weighted set-covering problems. Working paper,Operations Management and Information Systems Department, Northern Illinois University
19. Jacobs LW, Brusco MJ (1995) Note: a local-search heuristic for large set-covering problems. Nav ResLogist 42(7):1129–1140
20. Hossain A, Chakrabarti S, Biswas PK (2008) Sensing models and its impact on network coverage inwireless sensor network. In: IEEE region 10 colloquium and the 3rd ICIIS, Dec 2008
21. The Network Simulator 2 (NS2). http://www.isi.edu/nsnam/ns/ (2010)22. Johnson DB (1999) Validation of wireless and mobile network models and simulation. In
DARPA/NIST network simulation validation workshop23. Kunz T (2008) Energy-efficient variations of OLSR, Piscataway, NJ 08855-1331, United States, pp
517–522