
District 11-E1, District Governor Lion John Monahan “Together ...
Upload
independentCategory
view
0download
0
SISTEMAS DINÁMICOS
ACTIVIDAD INICIAL
OSCAR BONILLA PATIÑO C.C 9970810NEHEMÍAS BURGOS C.C 10005056FRANK CHARLES SANCHEZ C.C.JHON JAIRO RESTREPO C.C.
GRUPO: 201527_21
TUTOR: DIEGO FERNANDO SENDOYA LOSADA
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA - UNADESCUELA DE CIENCIAS BASICAS, TECNOLOGIA E INGENIERIA
INGENIERIA ELECTRONICA
2015
CONTENIDO.
Portada
Introducción
Resumen del análisis realizado por el grupo acerca de las
tareas de la etapa
Listado de conceptos conocidos
Listado de conceptos desconocidos
Metodología empleada para la investigación
Resultado de las consultas e información obtenida para
dar solución a las tareas de la etapa
Diseño del plan de acción para solucionar las tareas de
la etapa
Solución a las tareas de la etapa
Conclusiones
Referencias bibliográficas
INTRODUCCIÓN.
En la vida moderna no podemos desconocer la importancia que
tiene el control automático especialmente en el campo
industrial, una de las herramientas mas utiles en este caso
son las matematicas pues por emdio de ellas se llegan a muy
buenos resultados de manera muy confiable, es por ello que en
la solucion de este caso se aplicaran conceptos y formulas
matematicas. Los sistemas dinámicos se pueden definir de
manera conceptual como un ente que recibe unas acciones
externas o variables de entrada, y cuya respuesta a estas
acciones externas se obtienen las variables de salida.
Para solucionar este caso se estudiaran los sitemas de
control como etapa fundamental, lo cual facilitara el
aaprendizaje y las habilidades y destrezas en el manejo de
las diferentes herramientas matematicas existentes.
Los sitemas de control tiene unas caracteristicas muy
interesantes que permiten obtenr unas respuestas deseadas
según lo requerido en cuyo caso, se puedan obtener resultados
de acuerdo a lso valores que se han ontroducido o se han
prefihjado.
Cualqueir sistema de contro se realiza para evitar fallas o
minimizar reizgos de fallas con el fin de obtener muy buenos
resultados.
RESUMEN DEL ANÁLISIS REALIZADO POR EL GRUPO ACERCA DE LAS
TAREAS DE LA ETAPA.
Se realiza la presentación de los integrantes del grupo
compartiendo sus datos personales y las expectativas del
curso y se empiezan a realizar los aportes de acuerdo a la
guía en la cual se solicita que se aparte una lluvia de
ideas para buscar solucionar la problemática presentada en
la cual se suben aportes muy valiosos.
Se realizó los aportes para comprender los términos y
conceptos desconocidos, se realizó aportes
LISTADO DE CONCEPTOS CONOCIDOS.
Sistemas. Combinación de elementos que interactúan en
conjunto para lograr un objetivo
Sistemas dinámicos. Los sistemas dinámicos sirven para
entender como evolucionan los procesos de la naturaleza
Señal entrada- salida. En las aplicaciones típicas de
ingeniería, las señales de entrada y salida son variables
(físicas o abstractas) que cambían en el tiempo, como por
ejemplo, fuerzas, velocidades, temperaturas,
Controlador: Es aquel instrumento que compara el valor medido
con el valor deseado, en base a esta comparación calcula un
error (diferencia entre valor medido y deseado), para luego
actuar a fin de corregir este error. Tiene por objetivo
elaborar la señal de control que permita que la variable
controlada o variable de salida corresponda a la señal de
referencia. Los controladores pueden ser de tipo manual,
neumático o electrónico.
control en lazo cerrado. un sistema de control en lazo
cerrado es aquel que toma una muestra de la señal de salida
y(t) y la compara con la señal de entrada o señal de
referencia r(t) , si hay discrepancia entre las dos señales,
entonces se produce una señal de error e(t) , la cual actúa
sobre el mecanismo controlador con el fin de que este genere
una señal adecuada u(t) , que permita un control efectivo
sobre la planta o proceso.
Control: Se puede definir el control como la manipulación
indirecta de las magnitudes físicas de un sistema denominado
planta a través de otro sistema denominado sistema de
control, existen dos tipos de control los cuales son, el
manual y el automático de proceso.
Dominio de la frecuencia: Es el análisis de funciones
matemáticas o señales respecto a su frecuencia.
Dominio del tiempo: Consiste en analizar una función
matemática, movimientos periódicos o señales de todo tipo con
respecto al tiempo.
CONTROL: Acción ejercida con el fin de poder mantener una variable dentro de un rango de valores predeterminados.
SISTEMA DE CONTROL: Conjunto de equipos y componentes, que van a permitir llevar a cabo las operaciones de control.

OPERACIONES DE CONTROL: Conjunto de acciones que buscan mantener una variable dentro de patrones de funcionamiento deseados.
CONTROL AUTOMÁTICO: Es el desarrollo de la acción decontrol, sin la participación directa de un ser humano(operario).
PLANTA: Es el ambiente donde se encuentran los equipos y donde se lleva a cabo el proceso. Se puede decir que es el conjunto de objetos físicos, en los cuales es necesario desarrollar acciones especialmente organizadas con el fin de lograr los resultados de funcionamiento y desempeño deseados; estos objetos van a ser controlados por medio de acciones.
SEÑALES DE CONTROL: Son aquellas acciones elaboradas por elsistema de control, o dadas por un operario, a través de las variables manipuladas. Por ejemplo, si se desea mantener un tanque a una temperatura constante, se deberá manipular el nivel de voltaje que recibe la resistencia quebrinda calor al tanque.
PERTURBACIONES: Son aquellas acciones que no dependen del sistema de control ni del operario, pero intervienen positiva o negativamente en el proceso. Por ejemplo, para el caso anterior si se desea mantener una temperatura constante en un tanque, la temperatura ambiental actuará e interferirá con el calor del tanque.
VARIABLES DE SALIDA: Son aquellas que caracterizan el estado de los procesos dentro de la planta, estas variablesson guiadas por variables controladas. Por ejemplo, si se cuenta con un recipiente de agua en el cual la variable de salida será el nivel, entonces la variable controlada será el flujo de líquido que ingresa al recipiente.

PROCESO INDUSTRIAL: Es la sucesión de cambios graduales (enel tiempo) de materia y energía, todo proceso implica unatransformación; generalizando se puede decir que es todofenómeno físico que se puede medir y controlar. Pueden serprocesos continuos (siderúrgica, petroquímica), procesos demanufactura (embotelladoras, confección de textiles),procesos de servicio (distribución de agua), y procesoshíbridos (reciclaje de vidrio).
CONTROLADOR: Es aquel instrumento que compara el valormedido con el valor deseado, en base a esta comparacióncalcula un error (diferencia entre valor medido y deseado),para luego actuar a fin de corregir este error. Tiene porobjetivo elaborar la señal de control que permita que lavariable controlada o variable de salida corresponda a laseñal de referencia. Los controladores pueden ser de tipomanual, neumático o electrónico. Los controladoreselectrónicos más usados son: computadores con tarjetas deadquisición de datos, PLC (Controladores LógicosProgramables) y microcontroladores (PIC).
ACTUADOR: Es aquel equipo que sirve para regular la variable de control y ejecutar la acción de control, también es conocido como elemento final de control. Los actuadores pueden ser de tres tipos:
Actuadores eléctricos: Son usados para posicionar dispositivos de movimientos lineales o rotacionales. Por ejemplo: motores, relés, switches y electroválvulas.
Actuadores neumáticos: Trabajan con señales de presión, estasseñales son convertidas a movimientos mecánicos. Por ejemplo: pistones neumáticos y válvulas.
Actuadores hidráulicos: Operan igual a los neumáticos, sonusados en tareas que requieren mayor fuerza por ejemplolevantar compuertas, mover grúas, elevadores, etc. Porejemplo: pistones hidráulicos.

SENSOR: Es un elemento de medición de parámetros o variablesdel proceso. Los sensores pueden ser usados también como indicadores, para transformar la señal medida en señal eléctrica. Los sensores más comunes son los de nivel, temperatura, presencia, proximidad, flujo, presión, entre otros. Pueden ser de varios tipos:
Sensores de contacto: Son aquellos que realizan la medidaen contacto directo, real y físico con el producto o materia. Por ejemplo: sensores de boya para medir nivel en un tanque, termocuplas para medir temperatura, etc.
Sensores de no contacto: Se basan en propiedades físicas de los materiales, son más exactos, pero son propensos a interferencias del medio ambiente. Por ejemplo: sensores ultrasónicos, sensores ópticos, etc.
Sensores digitales: Trabajan con señales digitales, en código binario, pueden representar la codificación de unaseñal analógica, o también la representación de dos estados ON/OFF. Por ejemplo: sensores tipo switch.
Sensores analógicos: Proporcionan medidas continuas, los rangos típicos son de 0 a 20 mA, 4 a 20 mA, 0 a 5 V, 1 a 5 V, entre otros. Por ejemplo: sensores capacitivos, sensores piezoresistivos, etc.
Sensores mecánicos: Son aquellos que traducen la acción física del elemento medido, en un comportamiento mecánico, típicamente de movimiento y/o calor. Por ejemplo: barómetros, termómetros de mercurio, etc.
Sensores electro-mecánicos: Este tipo de sensor emplea unelemento mecánico elástico combinado con un transductoreléctrico. Por ejemplo: sensores resistivos, sensoresmagnéticos, etc.
Tipos de Variables
Se define como variable a todo aquel parámetro físico cuyo valor puede ser medido. Puede ser:
VARIABLE CONTROLADA: Es aquella que se busca mantener constante o con cambios mínimos. Su valor debe seguir al set-point.
VARIABLE MANIPULADA: A través de esta se debe corregir el efecto de las perturbaciones. Sobre esta se colocaráel actuador.
VARIABLE PERTURBADORA: Esta dado por los cambios repentinos que sufre el sistema y que provocan inestabilidad.
VARIABLE MEDIDA: Es toda variable adicional, cuyo valores necesario registrar y monitorear, pero que no esnecesario controlar.
Señales de Comunicación: El flujo de información entre los elementos se da a través de señales. Las señales son un conjunto de datos que fluyen en diversos sentidos, conformando un flujo de información. Estas pueden ser:
SEÑALES ELÉCTRICAS: Utilizan el flujo de electrones sobre un conductor, pueden ser:
Señales analógicas: Son señales en tiempo continuo, la información está dada por la amplitud de la señal.
Señales digitales: Son señales en tiempo discreto, la información esta dada en código binario.
SEÑALES NEUMÁTICAS: La información está dada por la variación física de compresión o expansión de un fluidogaseoso en un tiempo determinado.
SEÑALES HIDRÁULICAS: En este caso las variaciones de presión por lo general de un líquido viscoso generan elconjunto de datos a ser transmitidos.
SEÑALES DE SONIDO: Conformadas por ondas de sonido producidas por el movimiento vibratorio de los cuerpos a una determinada frecuencia; también son usadas las ondas ultrasónicas.
SEÑALES ELECTROMAGNÉTICAS: La información viaja sobre unaonda de radio, microondas o satélite, empaquetada dentro de una señal portadora, recorriendo grandes distancias.
SEÑALES ÓPTICAS: Se hace uso de la fibra óptica y sonempleadas para transmitir grandes volúmenes deinformación, generalmente usadas en redes decontroladores.
SISTEMAS DE CONTROL CONTINUOS: Son aquellos que están descritos mediante ecuaciones diferenciales que describen las leyes físicas que rigen el comportamiento de dicho sistema, y que relacionan el comportamiento de la salida deeste ante una entrada determinada.
SISTEMAS DE CONTROL DISCRETOS: son aquellos descritosmediante ecuaciones en diferencia, y solo poseen valorespara determinados instantes de tiempo, separados porintervalos dados por un periodo constante. Está referido alas señales digitales, y su comportamiento matemático essimilar a un tren de pulsos. Por ejemplo el encendido yapagado de un switch que acciona una alarma.
Control digital o discreto: Es un sistema procesador diseñado paraque el sistema de control logre las especificaciones requeridas.
Interfaces A/D y D/A: Se usan para convertir señales continuasen señales discretas y señales discretas en señales
continuas, respectivamente. Permiten la introducción de unprocesador discreto en el sistema de control y reconstruyentemporalmente la señal discreta en una señal continua en eltiempo.
LISTADO DE CONCEPTOS DESCONOCIDOS.
Sistemas térmicos. Los sistemas térmicos son aquellos que
involucran la transferencia de calor demuna sustancia a otra.
Estos sistemas se analizan en términos de resistencia y
capacitancia, aunque la capacitancia térmica y la resistencia
térmica tal vez no se representen con precisión como
elementos de parámetros concentrados, dado que, por lo
general, están distribuidas en todas las sustancias. Para
lograr análisis precisos, deben usarse modelos de parámetros
distribuidos.
Regla de Mason. El ejemplo 3.18 pone en manifiesto que para
la obtención de la función de transferencia de un sistema a
partir de su diagrama de bloques es necesario desarrollar
habilidad en la manipulación de los mismos. Sin embargo,
existe un procedimiento general para la obtención de la
función de transferencia conocido como la regla de Mason.
• Trayectoria directa: Conjunto de bloques que van de la
entrada a la salida, sin repetirse.
• Ganancia de la trayectoria directa: Producto de las
ganancias de los bloques que forman la trayectoria directa.
• Lazo cerrado: Conjunto de bloques que parten de un punto de
suma o bifurcación y llegan al mismo punto, sin repetir
ningún bloque.
• Ganancia de lazo cerrado: Producto de las ganancias de los
bloques que forman un lazo.
• Lazos adyacentes: Lazos que comparten al menos un punto de
suma o bifurcación.
• Lazos no adyacentes: Lazos que no comparten ningún punto de
suma o bifurcación.
Flujo: Expresa el movimiento de un fluido, pero también
significa la cantidad total de fluido que ha pasado por una
sección determinada de un conducto.
Modelo matemático: Es cualquier tentativa de diseño de un
sistema que debe empezar a partir de una predicción de su
funcionamiento antes de que el sistema pueda diseñarse en
detalle o construirse físicamente y se basa en una
descripción matemática de las características dinámicas del
sistema.

Monitoreo: Es la supervisión periódica en la implementación
de una actividad, intervención, proyecto, o programa. Permite
establecer si los recursos invertidos, procesos (actividades
realizadas y su calidad), así como los resultados (productos
directos) si proceden según el plan.
Diagnostico fallas: Este método de análisis permite confirmar
o descartar los supuestos hechos al pretender encontrar el
origen de la falla. Al dar un diagnóstico sobre la falla de
una pieza es necesario plantear o dar soluciones para cada
caso. La falta de esto haría inútil el trabajo realizado en
las etapas anteriores.
Controlabilidad: La Controlabilidad se sujeta a sistemas
lineales o en sistemas lineales e invariantes y se dice que
un sistema es controlable si y solo si todos los puntos del
espacio de estado son controlables.
Observabilidad: supone que a partir de las salidas de un
sistema, es posible determinar el comportamiento de todo el
sistema. Si un sistema no es observable, los valores actuales
de algunos de sus estados no se pueden determinar a través de
sensores de salida.
1. SISTEMAS DE CONTROL CONTINUOS
Los sistemas de control continuos son aquellos que están
descritos mediante ecuaciones diferenciales que describen las
leyes físicas que rigen el comportamiento de dicho sistema, y
que relacionan el comportamiento de la salida de este ante
una entrada determinada.
Estos sistemas se caracterizan porque las variables poseen un
valor para cualquier tiempo posible dentro de un intervalo de
tiempo finito. Está referido a las señales analógicas, y su
comportamiento matemático es similar a una onda continua. Por
ejemplo un proceso de llenado de balones de gas.
Resistencia: Si tenemos el flujo a través de un tubo corto que conecta dos tanques, la resistencia R para el flujo de líquido en tal tubo se define como el cambio en la diferencia de nivel (la diferencia entre el nivel de líquido en los dos tanques) necesaria para producir un cambio de una unidad en la velocidad del flujo; es decir,
R=cambioenladiferenciadenivel(m)
cambioenlavelocidaddelflujo [m3/s ]
H: Altura en estado estable, [m]
Capacitancia: La capacitancia C de un tanque se define comoel cambio necesario en la cantidad de líquidoalmacenado, para producir un cambio en la altura.
C=cambioenellíquidoalmacenado[m3]
cambioenlavelocidaddelflujo [m ]
Debe señalarse que la capacidad (m3) y la capacitancia (m2) son diferentes. La capacitancia del tanque es igual
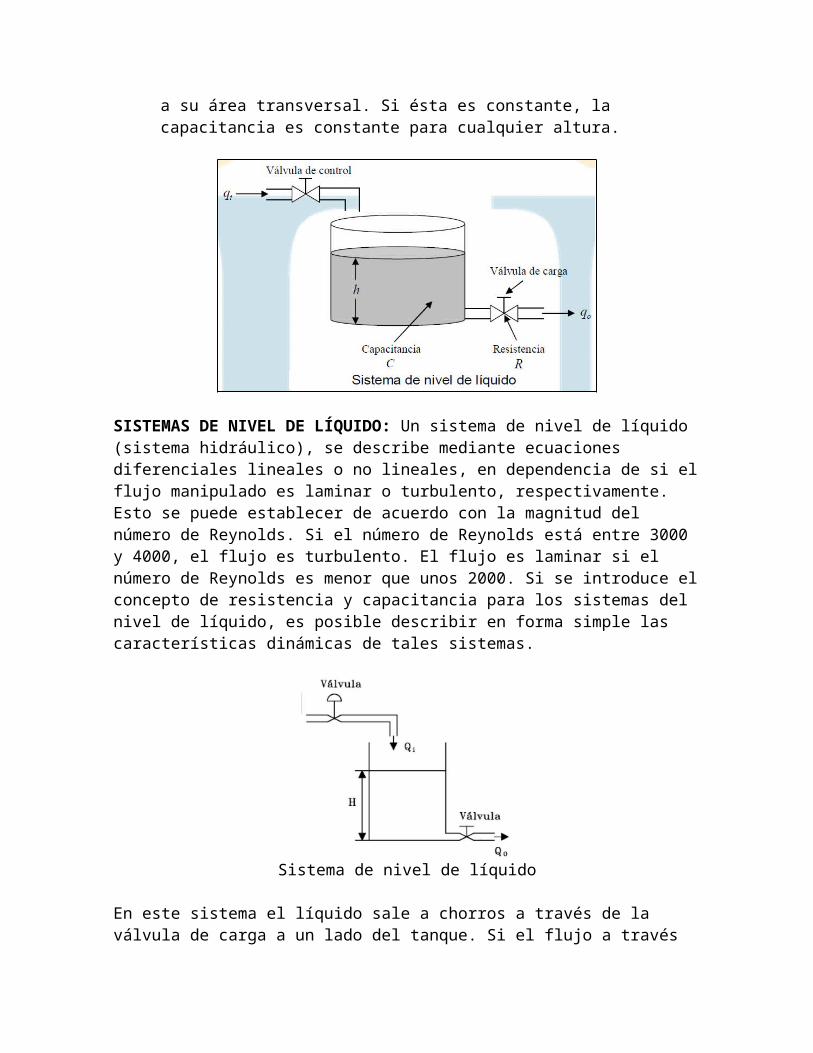
a su área transversal. Si ésta es constante, la capacitancia es constante para cualquier altura.
SISTEMAS DE NIVEL DE LÍQUIDO: Un sistema de nivel de líquido (sistema hidráulico), se describe mediante ecuaciones diferenciales lineales o no lineales, en dependencia de si elflujo manipulado es laminar o turbulento, respectivamente. Esto se puede establecer de acuerdo con la magnitud del número de Reynolds. Si el número de Reynolds está entre 3000 y 4000, el flujo es turbulento. El flujo es laminar si el número de Reynolds es menor que unos 2000. Si se introduce elconcepto de resistencia y capacitancia para los sistemas del nivel de líquido, es posible describir en forma simple las características dinámicas de tales sistemas.
Sistema de nivel de líquido
En este sistema el líquido sale a chorros a través de la válvula de carga a un lado del tanque. Si el flujo a través
de esta restricción es laminar, la relación entre la velocidad del flujo en estado estable y la altura en estado estable en el nivel de la restricción se obtiene mediante:
Q=KHDonde,
Q: Velocidad del flujo del líquido en estado estable, [m3/s ]
k: Coeficiente, [m2/s ]
H : Altura en estado estable, [m]
Controlabilidad: Es una propiedad importante de un sistema decontrol, y juega un papel crucial en muchos problemas de control, como la estabilización de sistemas inestables, o el control óptimo.
A grandes rasgos, el concepto de controlabilidad es la habilidad de mover un sistema en toda su configuración de espacios usando solamente ciertas manipulaciones admisibles. La definición exacta varía ligeramente dentro del marco de trabajo o los tipos de modelos aplicados.
Controlabilidad y observabilidad son aspectos duales de un mismo problema.
Observabilidad: Es una propiedad importante de un sistema de control, y gobierna la existencia de una solución de control óptimo. Es una medición que determina cómo los estados internos pueden ser inferidos a través de las salidas externas. La controlabilidad y la observabilidad de un sistema son aspectos duales de un mismo problema, estos criterios son utilizados para determinar de antemano la existencia de una solución de diseño según los parámetros y objetivos del diseño.
Formalmente, se dice que un sistema es observable si, mediante cualquier secuencia de los vectores de estado y de control, el estado actual puede determinarse en un tiempo
finito usando solamente las salidas (esta definición está orientada hacia la representación de espacios de estados). Demanera menos formal, esto significa que a partir de las salidas de un sistema es posible conocer el comportamiento detodo el sistema. Cuando un sistema no es observable, quiere decir que los valores actuales de algunos de sus estados no pueden ser determinados mediante sensores de salida: esto implica que su valor es desconocido para el controlador y, consecuentemente, no será capaz de satisfacer las especificaciones de control referidas a estas salidas.
METODOLOGÍA EMPLEADA PARA LA INVESTIGACIÓN.
La metodología empleada en esta investigación se realizó pormedio del Aprendizaje Basado en Problema, el cual se centraen el estudiante promoviendo que el aprendizaje seasignificativo, desarrollando una serie de habilidades ycompetencias indispensables en el entorno profesional actual.
El grupo colaborativo se ocupará en la búsqueda de lasolución a un problema planteado desencadenando elaprendizaje auto-dirigido.
RESULTADO DE LAS CONSULTAS E INFORMACIÓN OBTENIDA PARA DAR
SOLUCIÓN A LAS TAREAS DE LA ETAPA.
Los resultados se basaron en el estudio de las guías y
módulos de la UNAD, la consulta en internet, el estudio de
los conceptos desconocidos y la investigación de los temas
desconocidos.
DISEÑO DEL PLAN DE ACCIÓN PARA SOLUCIONAR LAS TAREAS DE LA
ETAPA.
Para comenzar a dar solución al problema debemos leer
muy bien el enunciado del problema y observar
detalladamente los datos y las variables que nos
entrega. Para este caso tenemos que:
El área trasversal o capacitancia es C=1m2.
Flujo de salida qo (t )=K√h (t ), donde K=10 litrosminuto √m
Flujo de entrada qi (t )
Altura del líquido dentro del tanque h (t )
Con los datos entregados por el problema podemos
encontrar un modelo matemático en el dominio del
tiempo que relacione la entrada con la salida del
sistema.
Debemos tener en cuenta que el modelo matemático lo
expresamos en forma de ecuación diferencial
Tener presente que el contenido del cilindro o flujo
acumulado es la diferencia del flujo de entrada con
respecto al flujo de salida
Después de tener las ecuaciones del sistema en el
dominio del tiempo, las llevamos al dominio de la
frecuencia (s) utilizando transformada de Laplace
considerando condiciones iniciales iguales a cero.
En base a los anteriores conceptos lo primero que debemoshacer es identificar los valores de las variables que nos danen el problema, es decir tomar en cuenta el siguiente dato:
El tanque es cilíndrico y posee un área transversal o capacitancia C = 1 m2. El flujo de salida qo (t ) depende de la altura del líquido dentro del tanque qo (t )=k√h(t), donde
k=10 litrosminutos√m
Entonces: El parámetro de entrada para este caso es el flujoqi (t ), y el parámetro de salida es el flujo q0 (t ), se puedeanalizar el sistema teniendo en cuenta que:
Flujo de Entrada – Flujo de Salida = Flujo Acumulado
Identificamos cada variable:
Flujo de entrada = qi (t ), Flujo de Salida = qo (t )
Flujo Acumulado = C∗dh(t)dt
C = Capacitancia o área Transversal

dh(t) = Derivada de la altura del líquido dentro del tanquecon respecto al tiempoh = Altura
Ahora reemplazamos:
qi (t )−qo (t)=C∗dh(t)dt
Hay que tomar en cuenta que, h (t )=Rqo (t)
R = Resistencia
De lo anterior se obtiene:
qi (t )−qo (t)=RC∗dqo (t )
dt
La anterior ecuación la podemos reescribir obteniendo una ecuación diferencial de primer orden:
Primero colocamos en un lado de la igualdad la variable qo (t ):
qi (t )=RC∗dqo (t )
dt+qo (t )
Segundo dividimos cada uno de los téminos de la ecuación por la Resistencia y Capacitancia (RC):
qi (t)RC =
RCRC
∗dqo (t)
dt +qo (t )RC
Revolvemos el resultado de dividir por RC y nos queda:
1RC
qi (t )=dqo (t)dt
+1RC
qo (t )
Reorganizamos los términos:
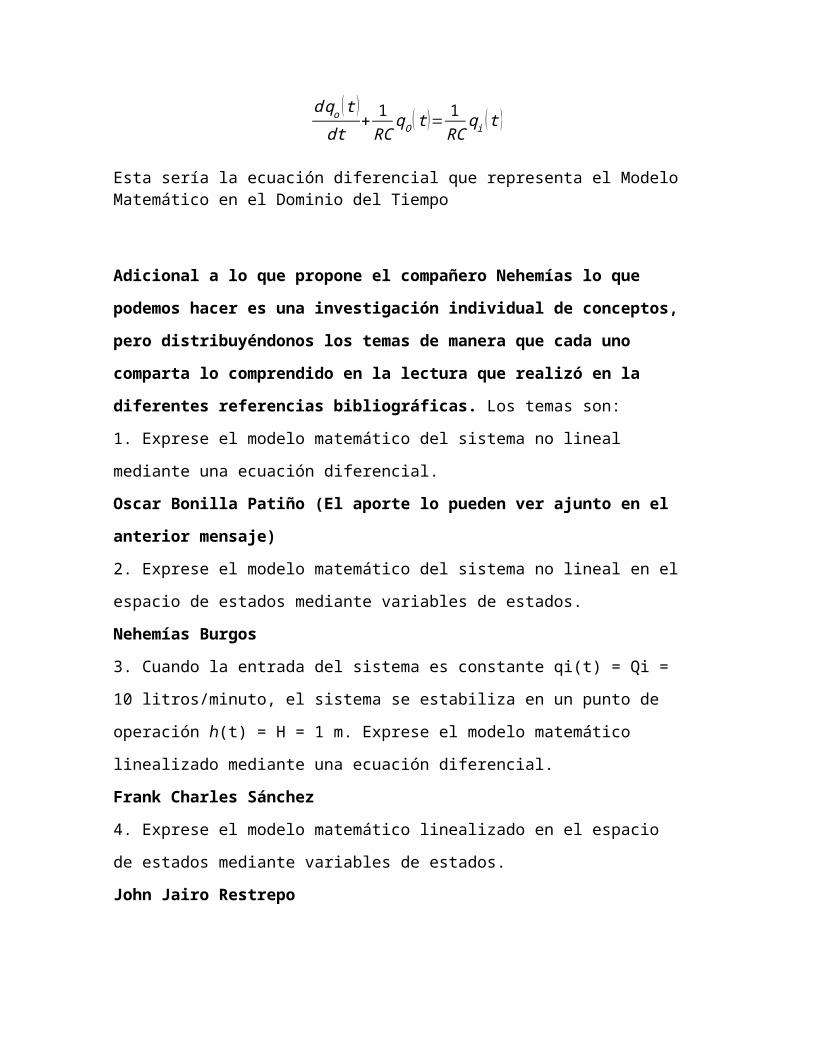
dqo (t )dt
+1RC
qO (t)= 1RC
qi (t )
Esta sería la ecuación diferencial que representa el Modelo Matemático en el Dominio del Tiempo
Adicional a lo que propone el compañero Nehemías lo que
podemos hacer es una investigación individual de conceptos,
pero distribuyéndonos los temas de manera que cada uno
comparta lo comprendido en la lectura que realizó en la
diferentes referencias bibliográficas. Los temas son:
1. Exprese el modelo matemático del sistema no lineal
mediante una ecuación diferencial.
Oscar Bonilla Patiño (El aporte lo pueden ver ajunto en el
anterior mensaje)
2. Exprese el modelo matemático del sistema no lineal en el
espacio de estados mediante variables de estados.
Nehemías Burgos
3. Cuando la entrada del sistema es constante qi(t) = Qi =
10 litros/minuto, el sistema se estabiliza en un punto de
operación ℎ(t) = H = 1 m. Exprese el modelo matemático
linealizado mediante una ecuación diferencial.
Frank Charles Sánchez
4. Exprese el modelo matemático linealizado en el espacio
de estados mediante variables de estados.
John Jairo Restrepo

5. Determine la controlabilidad y la observabilidad del
sistema lineal.
Oscar Bonilla Patiño
Utilice MATLAB® para simular el sistema no lineal y
grafique la salida el sistema cuando se aplica una entrada
constante qi(t) = Qi = 10 litros/minuto, durante los
primeros 2 minutos y en ese momento se aplica una entrada
escalón unitario, esto es, el flujo de entrada cambia
de 10 litros/minuto a 11 litros/minuto durante 3 minutos
más. De manera que la simulación dura 5 minutos.
Todos los miembros del grupo
Una vez tengamos claridad en los temas, podemos proceder a
discutir los conceptos en el foro y consolidar la
información para el trabajo final.
SOLUCIÓN A LAS TAREAS DE LA ETAPA.
El tanque es cilíndrico y posee un área transversal o capacitancia C = 1 m2. El flujo de salida qo (t ) depende de la

altura del líquido dentro del tanque qo (t )=k√h(t), donde
k=10 litrosminutos√m
Entonces: El parámetro de entrada para este caso es el flujoqi (t ), y el parámetro de salida es el flujo q0 (t ), se puedeanalizar el sistema teniendo en cuenta que:
Flujo de Entrada – Flujo de Salida = Flujo Acumulado
Identificamos cada variable:
Flujo de entrada = qi (t ), Flujo de Salida = qo (t )
Flujo Acumulado = C∗dh(t)dt
C = Capacitancia o área Transversaldh(t) = Derivada de la altura del líquido dentro del tanquecon respecto al tiempoh = Altura
Ahora reemplazamos:
qi (t )−qo (t)=C∗dh(t)dt
Hay que tomar en cuenta que, h (t )=Rqo (t)
R = Resistencia
De lo anterior se obtiene:
qi (t )−qo (t)=RC∗dqo (t )
dt
La anterior ecuación la podemos reescribir obteniendo una ecuación diferencial de primer orden:
Primero colocamos en un lado de la igualdad la variable qo (t ):

qi (t )=RC∗dqo (t )
dt+qo (t )
Segundo dividimos cada uno de los téminos de la ecuación por la Resistencia y Capacitancia (RC):
qi (t)RC =
RCRC
∗dqo (t)
dt +qo (t )RC
Revolvemos el resultado de dividir por RC y nos queda:
1RC
qi (t )=dqo (t)dt
+1RC
qo (t )
Reorganizamos los términos:
dqo (t )dt
+1RC
qO (t)= 1RC
qi (t )
Reemplazamos qo (t )=k√h(t) en la fórmula y queda:
dk√h(t)dt
+1RC
∗k√h(t)=1RC
qi (t)
Esta sería la ecuación diferencial que representa el Modelo Matemático en el Dominio del Tiempo
=================================================================
El tanque es cilíndrico y posee un área transversal o capacitancia C = 1 m2. El flujo de salida qo (t ) depende de la altura del líquido dentro del tanque qo (t )=k√h(t), donde
k=10 litrosminutos√m

Entonces: El parámetro de entrada para este caso es el flujoqi (t ), y el parámetro de salida es el flujo q0 (t ), se puedeanalizar el sistema teniendo en cuenta que:
Flujo de Entrada – Flujo de Salida = Flujo Acumulado
Identificamos cada variable:
Flujo de entrada = qi (t ), Flujo de Salida = qo (t )
Flujo Acumulado = C∗dh(t)dt
C = Capacitancia o área Transversaldh(t) = Derivada de la altura del líquido dentro del tanquecon respecto al tiempoh = Altura
Ahora reemplazamos:
qi (t )−qo (t)=C∗dh(t)dt
Esta sería la ecuación diferencial que representa el Modelo Matemático en el Dominio del Tiempo.
Tomamos en cuenta los valores que me da el ejercicio:
k=10 litrosminutos√m
C=1m2
h(t) = H = 1 m
qi (t )−k√h(t)=C∗dh(t)
dt

qi (t )− 10ltsminutos√m
∗√1m=1m2∗1m
Para un flujo de 10lts/min y h(t) = H = 1 m, nuestra ecuacióndel sistema queda:
G (s)=Qo(s)
Qi(s)=( 1
RCs+1)
Resolvemos RC:
R=H(s)Qo(s)
Pero:
R=H(s)
K√H(s) Entonces; R=
1m10lts/min (√1m)
R=0,1
Ahora:
RC=(0,1 ) (1) => RC=(0,1)
G (s)=( 10.1s+1 )
MUESTRA DE RESULTADOS
Tenemos que:

qi (t )−k√h(t)=C∗dh(t)
dt
Reordenamos:
C∗dh(t)dt =qi (t)−k√h (t)
C∗dh(t)dt +k√h (t)=qi (t )
dh(t)dt +
kC √h (t )=1
C qi (t)
Esta es la ecuación diferencial de primer orden en el dominiodel tiempo de nuestro ejercicio, que es de la forma:
a dXodt
+bXo=cXi (t)
Función de Transferencia:
A partir de la ecuación diferencial podemos sacar la funciónde transferencia del sistema y tomando la Transformada deLaplace con condiciones iniciales de cero:
dh(t)dt +
kC √h (t )=1
C qi (t)
(s+kC )H(s)=
1CQi (s )
G (s)= H(s)Qi(s)
=
1C
s+kC

Esta es nuestra función de transferencia del sistema,teniendo en cuenta que la salida es la altura del líquido oflujo acumulado H, y la entrada es el suministro de agua Qi.
Nuestra función de transferencia responde a un sistema deprimer orden, el cual es de la forma:
G(s)=K
ms+b=K
s+a=
1C
s+kC
Donde;
K=1C=1
m=1
b=a=kC=10
Así que nuestra función de transferencia del sistema es:
G(s)= 1s+10
Representación de la ecuación de estado:

Si la dinámica del sistema se puede representar mediante laecuación diferencial:
KU=Ẋ1+aX1
Entonces, el sistema posee una única variable de estado, alser de primer grado, que puede ser la salida del bloque, laecuación de estado es por lo tanto:
Ẋ1=−aX1+KU
X1=h(t)
Ẋ1=ḣ(t)
U=qi
Tenemos que:
Ẋ1=−aX1+KU
ḣ(t)=−(10)h+(1)qi
La ecuación de estado del sistema es:
ḣ(t)=−10h+qi
Espacio de estados:
El espacio de estados es de la forma:
[h ]=[−bm ] [h ]+[1m ][qi]
Donde:
A=[−bm ]=−10
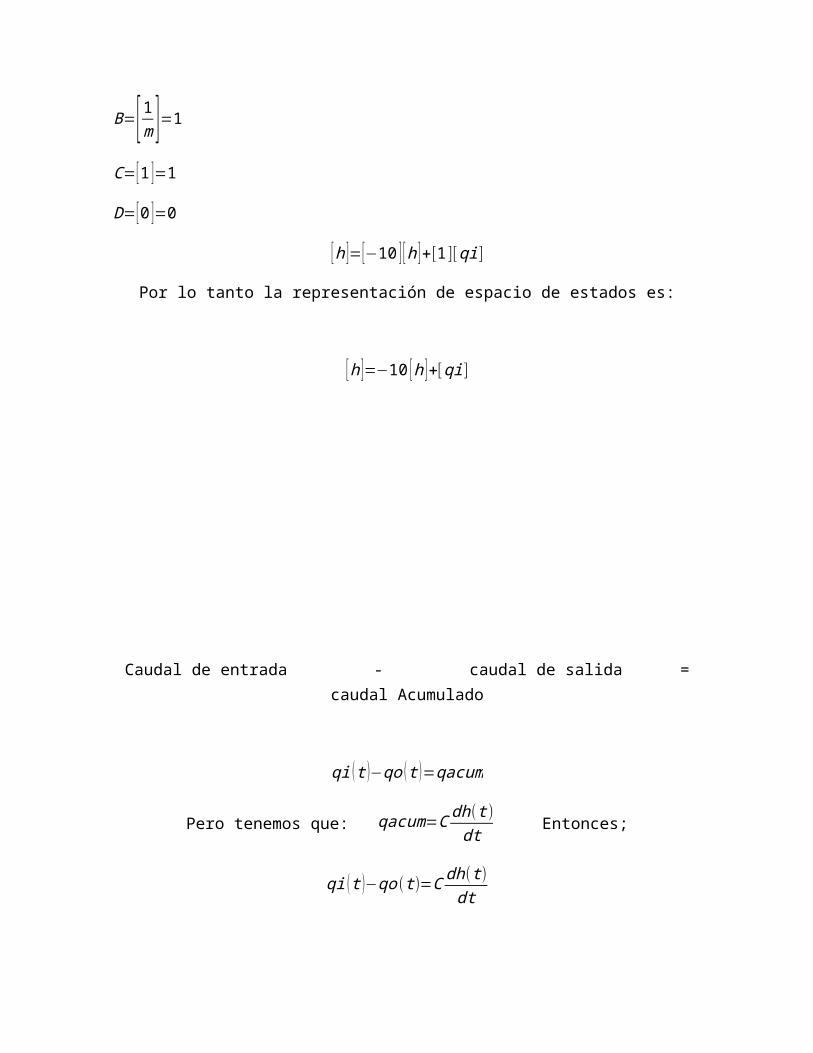
B=[1m ]=1C=[1 ]=1
D=[0 ]=0
[h ]=[−10 ] [h ]+[1 ][qi]
Por lo tanto la representación de espacio de estados es:
[h ]=−10 [h ]+[qi]
Caudal de entrada - caudal de salida =caudal Acumulado
qi (t )−qo (t )=qacum
Pero tenemos que: qacum=C dh(t)dt Entonces;
qi (t )−qo (t)=C dh(t)dt

qo(t)=h(t)R
qi (t )−h(t)R
=Cdh (t)dt
Ahora:
Qi (s )−Qo (s)=CsH(s)
Qo(t)=H(s)R
Qi (s )−H(s)R
=CsH(s)
Entonces tenemos que:
CONCLUSIONES.
En este trabajo se pudo apreciar la importancia de trabajar
en equipo, ser organizados y responder por las diferentes
actividades.
Se concluye que las matemáticas es una ciencia que se
aplica en cualquier campo disciplinar como en este caso en
el almacenamiento de líquidos en un tanque.
Los sistemas de control son etapas demasiado importantes en
cualquier campo de las ciencias.
Se utilizó las ecuaciones diferenciales para buscar el
modelo matemático con el fin de resolver el problema.
Se realizó un resumen del análisis realizado por el grupo
acerca de las tareas de la etapa
Se trabajó con los conceptos conocidos y se investigó el
listado de conceptos des conocidos
Se diseñó un del plan de acción para solucionar las tareas
de la etapa.
Referencias Bibliográficas
UNAD, Sistemas y modelos, recuperado de http://152.186.37.83/ecbti01/mod/lesson/view.php?id=271&pageid=21
UNAD, Sistemas de nivel de líquidos, recuperado de http://152.186.37.83/ecbti01/mod/lesson/view.php?id=271&pageid=25
UNAD, Sistemas no lineales, recuperado de http://152.186.37.83/ecbti01/mod/lesson/view.php?id=271&pageid=27
UNAD, Controlabilidad y Observabilidad, recuperado de http://152.186.37.83/ecbti01/mod/lesson/view.php?id=271&pageid=29
UNAD, Referencias bibliográficas complementarias, recuperado de http://152.186.37.83/ecbti01/mod/lesson/view.php?id=271&pageid=31
Universidad Nacional de Colombia sede Bogotá, Curso virtual de análisis de sistemas dinámicos. Recuperado en http://www.virtual.unal.edu.co/cursos/ingenieria/2001619/index.html
Copyright © 2022 FDOKUMEN




















