Dynamic Low-Power Reconfiguration of Real-Time Systems With Periodic and Probabilistic Tasks
14
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination. IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING 1 Dynamic Low-Power Reconfiguration of Real-Time Systems With Periodic and Probabilistic Tasks Xi Wang, Imen Khemaissia, Mohamed Khalgui, ZhiWu Li, Senior Member, IEEE, Olfa Mosbahi, and MengChu Zhou, Fellow, IEEE Abstract—This paper deals with the dynamic low-power re- configuration of a real-time system. It processes periodic and probabilistic tasks that have hard/soft deadlines corresponding to internal/external events. A runtime event-based reconfiguration scenario is a dynamic operation allowing the addition/removal of the assumed periodic/probabilistic tasks. Thereafter, some tasks may miss their hard deadlines and the power consumption may increase. In order to reconfigure the system to be feasible, i.e., satisfying its real-time constraints with low-power consumption, this research presents a software-agent-based architecture. An intelligent agent is developed, which provides four solutions to reconfigure the system at runtime. For these solutions, in order to reconfigure the probabilistic tasks to be feasible, the agent mod- ifies their temporal parameters dynamically; moreover, in order to feasibly serve the probabilistic tasks and reduce the system’s power consumption, the agent provides three virtual processors by dynamically extending the periods of the periodic tasks. A simulation study verifies the effectiveness of the agent. Note to Practitioners—This study addresses new challenges in the real-time industrial systems by proposing original solutions for their low-power reconfiguration. This contribution is signifi- cant for future generations of low-power technology. A runtime event-based reconfiguration scenario is technically defined as any operation that works by adding/removing tasks. An agent-based architecture is developed, where an intelligent software agent is implemented to check the system’s runtime evolution. The agent presents useful technical solutions to reconfigure the system in Manuscript received August 10, 2013; accepted January 09, 2014. This paper was recommended for publication by Associate Editor H. Sethuraman and Ed- itor H. Ding upon evaluation of the reviewers’ comments. This work was sup- ported in part by the National Natural Science Foundation of China under Grant 61374068 and the Science and Technology Development Fund, MSAR, under Grant 066/2012/A2. X. Wang is with the School of Electro-Mechanical Engineering, Xidian Uni- versity, Xi’an 710071, China, and also with the Systems Control Group, Depart- ment of Electrical and Computer Engineering, University of Toronto, Toronto, ON M5S 3G4, Canada (e-mail: [email protected]). I. Khemaissia and O. Mosbahi are with Tunis El-Manar University, Tunis 2092, Tunisia (e-mail: [email protected]; olfamos- [email protected]). M. Khalgui is with the ITIA Institute, National Council of Research, Rome 00161, Italy, and also with the University of Carthage, Carthage 1054, Tunisia (e-mail: [email protected]). Z. W. Li is with the Institute of Systems Engineering, Macau University of Science and Technology, Taipa, Macau, the Faculty of Engineering, King Abdulaziz University, Jeddah 21589, Saudi Arabia, and also with the School of Electro-Mechanical Engineering, Xidian University, Xi’an 710071, China (e-mail: [email protected]). M. C. Zhou is with the Key Laboratory of Embedded System and Service Computing, Ministry of Education, Tongji University, Shanghai 200092, China, and also with the Department of Electrical and Computer Engineering, New Jersey Institute of Technology Newark, NJ 07102 USA (e-mail: [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TASE.2014.2309479 order to meet the temporal constraints of the tasks and satisfy the system’s low-power consumption. It can also be deployed in reconfigurable real-time embedded systems such as lap-tops, mobile phones, and personal digital assistants. Index Terms—Agent-based architecture, dynamic reconfigura- tion, EDF scheduling, low-power, real-time system. NOMENCLATURE periodic task set; corresponding synchronous task set of ; probabilistic task set; periodic task; probabilistic task with a hard deadline; probabilistic task with a soft deadline; release time rate of ; worst-case execution time (WCET) rate of ; WCET of ; WCET of ; WCET of ; relative deadline of ; deadline of ; deadline of ; deadline of ; processor demand; subset of tasks in with higher or same priority than ; hyper period; length of an idle period; end time of an idle period; start time of an idle period; th job of ; length of a busy period; end time of a busy period; start time of a busy period; length of a processor busy period; 1545-5955 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Dynamic Low-Power Reconfiguration of Real-Time Systems With Periodic and Probabilistic Tasks

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING 1
Dynamic Low-Power Reconfiguration of Real-TimeSystems With Periodic and Probabilistic Tasks
Xi Wang, Imen Khemaissia, Mohamed Khalgui, ZhiWu Li, Senior Member, IEEE, Olfa Mosbahi, andMengChu Zhou, Fellow, IEEE
Abstract—This paper deals with the dynamic low-power re-configuration of a real-time system. It processes periodic andprobabilistic tasks that have hard/soft deadlines corresponding tointernal/external events. A runtime event-based reconfigurationscenario is a dynamic operation allowing the addition/removal ofthe assumed periodic/probabilistic tasks. Thereafter, some tasksmay miss their hard deadlines and the power consumption mayincrease. In order to reconfigure the system to be feasible, i.e.,satisfying its real-time constraints with low-power consumption,this research presents a software-agent-based architecture. Anintelligent agent is developed, which provides four solutions toreconfigure the system at runtime. For these solutions, in order toreconfigure the probabilistic tasks to be feasible, the agent mod-ifies their temporal parameters dynamically; moreover, in orderto feasibly serve the probabilistic tasks and reduce the system’spower consumption, the agent provides three virtual processorsby dynamically extending the periods of the periodic tasks. Asimulation study verifies the effectiveness of the agent.
Note to Practitioners—This study addresses new challenges inthe real-time industrial systems by proposing original solutionsfor their low-power reconfiguration. This contribution is signifi-cant for future generations of low-power technology. A runtimeevent-based reconfiguration scenario is technically defined as anyoperation that works by adding/removing tasks. An agent-basedarchitecture is developed, where an intelligent software agent isimplemented to check the system’s runtime evolution. The agentpresents useful technical solutions to reconfigure the system in
Manuscript received August 10, 2013; accepted January 09, 2014. This paperwas recommended for publication by Associate Editor H. Sethuraman and Ed-itor H. Ding upon evaluation of the reviewers’ comments. This work was sup-ported in part by the National Natural Science Foundation of China under Grant61374068 and the Science and Technology Development Fund, MSAR, underGrant 066/2012/A2.X. Wang is with the School of Electro-Mechanical Engineering, Xidian Uni-
versity, Xi’an 710071, China, and also with the Systems Control Group, Depart-ment of Electrical and Computer Engineering, University of Toronto, Toronto,ON M5S 3G4, Canada (e-mail: [email protected]).I. Khemaissia and O. Mosbahi are with Tunis El-Manar University,
Tunis 2092, Tunisia (e-mail: [email protected]; [email protected]).M. Khalgui is with the ITIA Institute, National Council of Research, Rome
00161, Italy, and also with the University of Carthage, Carthage 1054, Tunisia(e-mail: [email protected]).Z. W. Li is with the Institute of Systems Engineering, Macau University
of Science and Technology, Taipa, Macau, the Faculty of Engineering, KingAbdulaziz University, Jeddah 21589, Saudi Arabia, and also with the Schoolof Electro-Mechanical Engineering, Xidian University, Xi’an 710071, China(e-mail: [email protected]).M. C. Zhou is with the Key Laboratory of Embedded System and Service
Computing, Ministry of Education, Tongji University, Shanghai 200092, China,and also with the Department of Electrical and Computer Engineering, NewJersey Institute of TechnologyNewark, NJ 07102USA (e-mail: [email protected]).Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TASE.2014.2309479
order to meet the temporal constraints of the tasks and satisfythe system’s low-power consumption. It can also be deployedin reconfigurable real-time embedded systems such as lap-tops,mobile phones, and personal digital assistants.
Index Terms—Agent-based architecture, dynamic reconfigura-tion, EDF scheduling, low-power, real-time system.
NOMENCLATURE
periodic task set;
corresponding synchronous task set of ;
probabilistic task set;
periodic task;
probabilistic task with a hard deadline;
probabilistic task with a soft deadline;
release time rate of ;
worst-case execution time (WCET) rate of ;
WCET of ;
WCET of ;
WCET of ;
relative deadline of ;
deadline of ;
deadline of ;
deadline of ;
processor demand;
subset of tasks in with higher or samepriority than ;
hyper period;
length of an idle period;
end time of an idle period;
start time of an idle period;
th job of ;
length of a busy period;
end time of a busy period;
start time of a busy period;
length of a processor busy period;
1545-5955 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
2 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING
subset of tasks in with lower priority than;
;
;
;
power consumption;
set-priority;
release time of ;
release time of ;
release time of ;
release time of ;
absolute response time of ;
system-speed;
periodic-speed;
probabilistic-speed;
real-time system;
period of periodic task ;
processor utilization;
periodic-utilization;
processor utilization of periodic task ;
probabilistic-utilization;
virtual processor handling periodic tasks;
virtual processor handling hard probabilistictasks;
virtual processor handling soft probabilistictasks;
processor supply voltage;
workload demand of periodic tasks in ;
workload demand of periodic tasks in ;
workload demand of periodic tasks in ;
workload demand of probabilistic tasks in;
workload demand of the tasks within ;
workload demand of the tasks within ;
worst-case response time of periodic task .
I. INTRODUCTION
A S KNOWN, low-power consumption is of critical impor-tance to real-time systems (RTSs). Their battery life can
be extended by reducing their power consumption, which is asignificant criterion for battery-powered RTSs. Such an RTSusually consists of a set of real-time operating system (OS)tasks. The probabilistic inputs activate probabilistic tasks. Forexample, considering a laptop, typing its keyboard or clicking
its mouse can activate probabilistic tasks. Furthermore, the ser-vice processes for keyboard/mouse inputs can be viewed as pe-riodic tasks. There has been a fair amount of significant studiesfrom academy and industry [1]–[5] for real-time and low-powerreconfiguration, which are based on the rate-monotonic (RM)/earliest deadline first (EDF) scheduling with preemptive/non-preemptive schemes. One of the most outstanding achievementsof low-power scheduling is the dynamic voltage scaling (DVS)scheduling [6]–[12]. Furthermore, novel criteria such as flexi-bility and agility are considered in [13]. As a consequence, re-ducing power consumption at the OS level and offering optimalreal-time services are of paramount significance to the RTS per-formance [14], [15].Several distinguished studies deal with reconfigurable sys-
tems [16], [17]. The work related to agent-based reconfigurableRTSs can be found in [18]–[21]. In principle, two sets of re-configuration policies can be identified: 1) static ones that areapplied offline before any system’s cold start [22] and 2) dy-namic ones that are applied at runtime [23]. The latter is ad-dressed throughout this study. The most significant solutions tothe reconfiguration of real-time tasks that are scheduled by thefixed priority (FP) or EDF algorithm are proposed in [17]. Thestudies handling power consumption of probabilistic tasks/sys-tems can be found in [16] and [24]. An approach is proposedin [25] to minimize the power consumption of soft RTSs byconsidering the quality-of-service (QoS)-guarantee [26]–[30].This present study aims to dynamically reconfigure probabilisticRTSs (PRTSs) by using dynamic window-constrained sched-uling (DWCS) [31]. Even though the existing reconfigurationtechniques are useful, they fail to consider the dynamic adap-tation of PRTSs in dynamic reconfiguration scenarios. For thepurpose to minimize the systems’ power consumption, thereis much work that utilizes DWCS to dynamically reconfigurePRTSs with periodic real-time OS tasks as background tasksthat serve probabilistic tasks by providing required (software/hardware) resources.A PRTS is assumed to process two task sets: 1) a proba-
bilistic task set containing two subsets that are associated withhard and soft deadlines, respectively [32], and 2) a periodictask set containing several synchronous/asynchronous periodictasks. A task’s service time is between its best-case executiontime (BCET) and worst-case execution time (WCET) [1]. Onthe occurrence of a random disturbance, a set of OS tasks can beadded/removed to/from the system dynamically. This study as-sumes that a random disturbance can be any random internal/ex-ternal event. In order to guarantee its execution feasibility, eachtask’s WCET is considered as its service time. According to theM/M/1 model [33], probabilistic tasks have Markovian arrivaland service processes on a unique server that is the processor inuse. They request the processor according to a Poisson processand their WCETs are exponentially distributed.Suppose that a PRTS can be reconfigured repeatedly. Before
any reconfiguration scenario, it is feasible with low-power con-sumption. Four common runtime event-based reconfiguration(RER) forms are considered in this paper: 1) adding periodictasks and probabilistic ones simultaneously; 2) adding periodictasks only; 3) adding probabilistic tasks only; and 4) addingprobabilistic tasks and removing periodic ones simultaneously.According to [18], the low-power schedulability of an RTS can

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
WANG et al.: DYNAMIC LOW-POWER RECONFIGURATION OF REAL-TIME SYSTEMS WITH PERIODIC AND PROBABILISTIC TASKS 3
be converted into its feasibility with a minimal processor speedthat is linearly dependent on the processor utilization.As a major contribution of this paper, an intelligent software
agent is developed to dynamically reconfigure PRTSs by twophases. The first is to minimize the power consumption. By pro-viding four different reconfiguration solutions, the agent modi-fies the period of each periodic task and reconfigures the distri-bution of probabilistic tasks’ WCETs. In the second phase, theagent logically decomposes the execution of the hardware pro-cessor into three virtual ones [34] that are utilized to feasiblyexecute periodic tasks, probabilistic ones with hard deadlines,and probabilistic ones with soft deadlines, respectively. A toolis developed to support all the services offered by the agent.The real-time simulator Cheddar [35] is selected to verify thesystem’s behavior and to evaluate the developed algorithms’performance. The simulation results show that, after applyingeach real-time agent-based reconfiguration (RAR), the proposedtool can keep the power consumption almost unchanged.The rest of this paper is organized as follows. Section II
presents the terminologies used throughout this paper. Anagent-based architecture is defined in Section III, which dealswith the low-power reconfiguration of PRTSs. Section IVreports methodologies to reduce the power consumption afterruntime event-based reconfiguration scenarios. Three virtualprocessors are given in Section V. Section VI deals with themodification of temporal parameters of the processed tasks toguarantee their feasibility. The power consumption is evaluatedin Section VII. The architecture is implemented, simulated, andanalyzed in Section VIII. Some interesting issues are discussedin Section IX. Finally, Section X concludes this work.
II. CONCEPTS AND TERMINOLOGY
A. System Model
In 1973, the feasibility analysis of periodic task sets underEDF scheduling was proposed by Liu and Layland [36]. Witha preemptive scheme, among all scheduling algorithms, EDFscheduling is optimal. Under EDF, a set of periodic tasks isschedulable, if and only if its processor utilization is no greaterthan 1. Hence, EDF scheduling is selected in this study. Since allthe tasks’ activations and allocations are in discrete time, theyare assigned with integer temporal parameters. A PRTS, sym-bolled by , processes two task sets:• a periodic task set containing synchronous/asyn-chronous and periodic tasks, i.e.,[36];
• a probabilistic task set containing probabilistic taskswith hard or soft deadlines, denoted by or , respec-tively [32]. These tasks are regrouped in two separated sub-sets according to their deadlines, which are associated withindependent identical distributions.
Suppose that can be reconfigured repeatedly and its initialconfiguration is denoted as . , after theth runtime event-based reconfiguration (RER), i.e., addition/removal of periodic/probabilistic tasks, it evolves into . Notethat a symbol in this paper with a superscript “0” indicates acorresponding initial item/parameter within . Furthermore, asuperscript “ ” represents an item after the th RER. After the
th real-time agent-based reconfiguration (RAR) application, itis marked by a superscript “ .”
B. Task Model
The periodic tasks within are assumed to serve theprobabilistic tasks within by providing required hard-ware/software resources. All the tasks are assumed to bereconfigurable, i.e., their parameters can be modified at run-time. Following [36], a periodic task , is describedby , where• is the release time;• is the worst-case execution time (WCET);• is the relative deadline; and• is the period.
A synchronous (resp., asynchronous) task satisfies(resp., ). There is at least one asynchronous task within[37]. AWCET is interpreted as the maximum processing time
of [36]. The relative deadline of a periodic task is consideredas a hard deadline if its missing is unacceptable [37]. The hardrelative deadline of a periodic task is assumed to be less than orequal to its corresponding period, i.e., .Each periodic task produces an infinite sequence of jobs.
Each job , described by , is exe-cuted in only one single period. The release time of ’s thjob denotes its request time that can be calculated by
. Moreover, should be completed no laterthan its absolute deadline that is equal to its relative dead-line plus its current release time, i.e., .Each probabilistic task can produce only one job that is au-
tomatically destroyed after its execution is finished. A proba-bilistic task (resp. ) is characterized by:• release time (resp. ) following a Poisson process withthe rate ;
• WCET (resp. ) following an exponential distribu-tion with the same mean ; and
• absolute deadline (resp. ).The temporal parameters , , , and are reconfigurableand unpredictable. The violation of is acceptable.
C. Processor Utilization Model
The processor utilization of a task within , namely,task-utilization is the fraction of processor time spent on its ex-ecution [36], i.e., . Consequently, the processorutilization of , namely periodic-utilization, is formalized by
(1)
Due to the M/M/1 model [33], the probabilistic-utilization, i.e., the processor utilization of , can be calculated by
(2)
Consequently, the processor utilization of , i.e., the system-utilization is
(3)

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
4 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING
D. Power Consumption Model
Thanks to the studies in [2] and [18], we assign the initialprocessor speed to be . Hence, the initial system isfeasible and its processor’s power consumption is lower than athreshold predefined by users. According to the results in [38]and [39], the supply voltage and processor frequencyof a DVS-enabled processor satisfy with. According to [2], can be changed instantly, i.e., .Thus, the function that represents the power consumption ofa DVS-enabled processor is at least quadratic with respect to theprocessor utilization, i.e.,
(4)
Consequently, reducing the power consumption can beachieved by reducing the processor utilization to be andassigning the processor speed accordingly. In this research, theprocessor speeds for and are defined as periodic-speedand probabilistic-speed , respectively. Both can be dynami-cally updated according to and .
E. Basic Concepts
The work [40] summarizes the well-known concepts suchas processor utilization, worst-case response times (WCRTs),hyper periods, processor demands, workload demands, andbusy periods. All the concepts are used in the reconfiguration ofPRTSs. The calculation of the processor and workload demandsof the periodic tasks released in a time interval are reported in[41] as follows:• processor demand: ;• workload demand in : ; and• workload demand in : .
III. DWCS-BASED ARCHITECTURE
After the th RER, is represented by . A possible dead-line violation of a periodic/probabilistic task may occur and thepower consumption increases to be . Consequently, an intel-ligent software control agent is provided to perform new config-urations on in order to achieve a feasible with low-powerconsumption, i.e., .
A. System Reconfiguration Model
Within , there are periodic tasks remaining in .Moreover, no more than subsets are in , which havedistributions and . Especially, the initial subset has dis-tributions and . According to [2] and [18], linearlyincreases to be at the lower processor speed . Since the ac-tivations are in a discrete time,WCETs increase to be the nearestintegers, i.e.,
(5)
Running Example.Table I shows a running example containing a set with four
periodic tasks and another with three probabilistic tasks, , ,and , with the distributions and . We canobtain . If the processor runs at speed , by(5), the WCETs of the seven tasks shown in Table I increase
TABLE IINITIAL TASKS
Fig. 1. Scheduling of the initial system.
TABLE IIADDED TASKS
Fig. 2. Scheduling of the system after tasks addition.
to 2, 2, 6, 12, 3, 2, and 2, respectively. Due to the Cheddarimplementation, the feasible low-power scheduling result ofis shown in Fig. 1. Furthermore, Table II indicates two periodicand two probabilistic tasks satisfying and .After their addition to , . As shown in Fig. 2, thescheduling of the system, even at full speed 1, is infeasible sinceis violated at time .
B. Intelligent Software Control Agent
For the purpose to reconfigure , an intelligent softwarecontrol agent is proposed to perform the reconfiguration. By uti-lizing DWCS, the agent decomposes the execution of the hard-ware processor into three virtual ones – . They can be uti-lized to execute the tasks in , the ones with hard deadlinesin , and the ones with soft deadlines in , respectively.Two goals can be achieved by implementing the agent for :• to reduce to be ; and• to reconfigure to be feasible.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
WANG et al.: DYNAMIC LOW-POWER RECONFIGURATION OF REAL-TIME SYSTEMS WITH PERIODIC AND PROBABILISTIC TASKS 5
They can be achieved by:• parameter modifications of the periodic tasks, i.e., periodsand/or deadlines; and
• parameter modifications of the probabilistic tasks by con-structing and revising their deadlines.
Especially, if periodic task reconfiguration cannot be allowed byusers, following [42], the agent can optimize the periodic-speedto a minimal value in order to satisfy all the periodic tasks’
deadlines.
IV. LOW-POWER RECONFIGURATIONS
In order to reconfigure a PRTS that is of low-power con-sumption such that , four solutions are provided by theagent to consider four common reconfiguration forms:• A: adding periodic and probabilistic tasks simultaneously;• B: adding periodic tasks only;• C: adding probabilistic tasks only; and• D: adding probabilistic tasks and removing periodic onessimultaneously.
A. Reconfiguration Form A: Simultaneous Addition
For this case, the agent provides Solution A to reconfigurewith the following three steps.
1) Solution A.1: Period Modification: According to [18],after the RAR application, should evolve into satis-fying . This solution chooses the period modificationto achieve this goal.Proposition 1: The extended period of a periodic task
is equal to .Proof: The initial periodic-utilization is
. After the th RER, it increases to bewith . Hence, holds.
By assuming , in order to obtain ,, the task-utilization should be
converted into by increasing their periods at least times,i.e., . The new periodic-utilization can be calculatedas . Since the periodallocations are in discrete time, the obtained periodic-utilization
by extending the periods to be the nearest integersthat are greater than or equal to , i.e., .Consequently, , i.e.,
.According to Proposition 1, the new periods are
(6)
The periodic-utilization evolves into
(7)
Example A. 1: (continued from the running example)By (6), the periods of the six periodic tasks shown in Tables I
and II are modified to be 104, 39, 88, 207, 52, and 65, respec-tively. The periodic-utilization is modified to befrom .2) Solution A.2: Reconfiguration of : After the th RER,
no more than subsets of probabilistic tasks are added to .
The probabilistic-utilization increases to be . Due to [34],for the purpose of decreasing to be , the distribu-tions can be updated to , i.e.,
(8)
Obviously, the power consumption is reduced to be . Sinceis a positive real number, the probabilistic-utilization is
(9)
Consequently, Proposition 2 can be derived.Proposition 2: Equation (9) is satisfied if the added proba-
bilistic task set is empty.Example A. 2: After the RAR application, and are
reconfigured to be and , respectively.Consequently, the WCETs of the five probabilistic tasks can berevised to be 2, 1, 1, 1, and 1, respectively. By (3), the newsystem-utilization is .3) Solution A.3: Processor Speed Reconfiguration: After theth RAR application, and are running at speeds and, respectively. Both are assigned to be
(10)
Example A. 3: By (10) and (5), theWCETs of the six periodictasks are 2, 2, 6, 12, 8, and 9, respectively. The WCETs of thefive probabilistic tasks are 3, 2, 2, 2, and 2, respectively.
B. Reconfiguration Form B: Addition of Periodic Tasks Only
Considering the addition of periodic tasks as a special case ofreconfiguration form A, i.e., with an empty set of probabilistictasks, (8)–(10) can be still utilized to reconfigure leading tothe following result.Theorem 1: Solution A can be implemented on reconfigura-
tion forms A and B.Example B: Consider the addition of periodic tasks discussed
in Example A, by (6), the reconfigured periodic-utilization is. Since no probabilistic tasks are added, remains
unchanged.
C. Reconfiguration Form C: Addition of Probabilistic TasksOnly
For this case, the agent provides Solution B to re-configure . Similar to Solution A, and ,
, can be calculated by (8) and(9). The processor speed remains unchanged, i.e.,
(11)
Since is assigned to be , the actual utilization takenby is . Moreover, the agent decreases in order tolocate the probabilistic tasks in the idle periods, i.e.,
(12)
Example C: (continued from the running example)

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
6 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING
Suppose that only the probabilistic tasks are added.should be reconfigured to be 0.4 from 0.65. By (12), isassigned to be 0.71.
D. Reconfiguration Form D: Simultaneous Addition andRemoval
Consider that one probabilistic task set is added to andperiodic ones are removed from simultaneously. Then, thenew periodic-utilization is
(13)
The agent provides Solution C to modify the parameters ofthe probabilistic tasks, as well as periodic tasks, if necessary.The modification of is as the same as that presented inSolution B. Since the probabilistic-utilization remains un-changed after each RAR application, . Fur-thermore, can be assigned via (12). After the periodic taskremoval, the new system-utilization is true.We have by , implying .Thus, the agent optimizes the speed for periodic tasks to bethat is near or equal to .As the optimal scaling factor of WCETs, parameter is pro-
posed in [42], which can be selected to modify the WCETs inorder to find the optimal WCETs to satisfy all the deadlines. Inthis paper, is utilized by the agent to adjust . Since WCETshave an inverse relationship with speed , it is obvious thatcannot be lower than as shown below
(14)
where• is the minimum deadline of the tasks within ; and• is the hyper period of the remaining tasks.
Since the optimal processor speed is , the agent adjuststhe periodic-speed to be
(15)
Example D: (continued from the running example)Suppose that task is removed from , while and are
added. The new utilizations , , and are equal to 0.4,0.21, and 0.61, respectively. By (14), is obtained.By (15), can be assigned to be 0.61.
E. -Based Parameter Modification
The developed agent provides Solution D to reconfigureresulting from the RER presented in Section IV-C or IV-D.1) Implementation for Reconfiguration Form C: Since only
the probabilistic tasks are added, different from (8) to decreaseby modifying , a technique is presented to modify the
parameters of all the tasks within . The agent extends the pe-riods of the periodic tasks and distributions of the probabilistic
tasks’ WCETs. The period of task in is modified asfollows:
(16)
Thus, can be calculated by (7). , the rate ismodified to be
(17)
Similar to (9), the probabilistic-utilization remains un-changed after each reconfiguration. Hence, the new system-uti-lization can be obtained by (3) and speeds and canbe assigned according to (10).Example E-1: (continued from the running example)Considering the RER presented in Example C, after the re-
configurations via (16) and (17), the periods of the four peri-odic tasks are extended to be 55, 21, 46, and 109, respectively.The WCET distributions are modified to be and
. By (10), the new speed can be assigned to be.
2) Implementation for Reconfiguration Form D: Solution Dcan be used to reconfigure when one faces a simultaneousaddition and removal scenario. The tasks within andcan be modified by (16) and (17). By (10), the processor speedsand can be assigned to be .Example E-2: (continued from the running example)After the RAR application of Solution D, for discussed in
Example D to survive, the periods of are extended to be49, 19, and 42, respectively. The WCET distributions become
and . By (10), the new processor speedcan be assigned to be .
V. VIRTUAL PROCESSORS
After the RAR applications according to the solutions pre-sented in Section IV, the power consumption is reduced.As a next step, in order to satisfy the temporal feasibility, threevirtual processors [34] are presented to regroup and handle thethree kinds of tasks in a single real processor.
A. Characteristics of Virtual Processors
The concept of constant bandwidth servers (CBSs) is pro-posed in [43] in order to implement resource reservations forperiodic and probabilistic tasks within RTSs. However, a CBSis limited to predict the tasks’ deadlines, since 1) all the tasks arescheduled by the EDF algorithm and 2) the probabilistic tasks’release time and WCETs are unpredictable. Thus, in order toconstruct the deadlines accurately, the agent provides three vir-tual processors, , to regroup all the tasks. A virtual pro-cessor is assumed to be a logical execution time slot of the hard-ware processor where the real execution of a subset of tasks canbe realized. Each slot is considered as a window.To schedule the tasks of in different execution time
slots and to dynamically satisfy the low-power and real-timeconstraints, the tasks are assigned with different labels ’s toindicate their set-priorities (SPs) [34]. Any task of a virtual pro-cessor with a higher SP, no matter its deadline is earlier or not,

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
WANG et al.: DYNAMIC LOW-POWER RECONFIGURATION OF REAL-TIME SYSTEMS WITH PERIODIC AND PROBABILISTIC TASKS 7
Fig. 3. Virtual processors.
cannot be preempted by the tasks with lower SPs. On the con-trary, all those tasks with lower SPs can be preempted by anywith a higher SP. The three virtual processors are shown asfollows:• with handles the periodic tasks within ;• with handles the probabilistic tasks with harddeadlines within ; and
• with handles the probabilistic tasks with softdeadlines within .
As shown in Fig. 3, the probabilistic tasks are of independentidentical distributions and they are running in the idle periodsof periodic tasks. Furthermore, and can be dynamicallyupdated according to their SPs.Example F. 1: In the rest of this paper, all the examples are
continued from Example A sequentially. After the addition ofthe tasks shown in Table II, is infeasible. By assigning dif-ferent SPs, the tasks can be regrouped by the agent as follows:
are handled by ; are handled by ; andare handled by .
B. Establishment of Virtual Processors
After each RAR application, and are located in the idleperiods of . Since the busy and idle periods appear alterna-tively, in a periodic task set , they should be calculated. Thetime intervals and , with , arethe lengths of the th busy period and idle period, respectively.The start time of the th idle period is equal to the end time ofthe th busy period, i.e., . Moreover, is equal to thestart time of the next busy period, i.e., .In order to calculate all the busy periods, in this research,
the workload demands, start time of the busy periods, and busyperiods’ lengths are automatically calculated by the agent. Thedetails of the calculation of the workload demands and start timeare presented in Appendices I and II.1) Establishment of : The virtual processors and are
located in the idle periods of that is the time slots runningby the busy periods of the periodic tasks within . The busyperiods can be obtained by iteratively calculating the workloaddemand of the jobs of the periodic tasks released in , i.e.,
. Hence, we can obtain the following result.Theorem 2: In a periodic task set , is the th busy
period iff: 1) and 2) is an idletime or .
Proof: Necessity: It is obvious that each busy period satis-fies conditions 1) and 2).Sufficiency: Since is an idle time or , is the
start time of a busy period. Moreover, all the jobs released intime interval can complete the execution in
iff . The workload demand is .Hence, is the busy period .According to Theorem 2, , the length of a busy period, can
be calculated by finding via an iterative calculation. canbe expressed as . , can becalculated by
(18)
where represents the workload demand ofthe jobs that request the processor at .This method can be utilized to calculate the busy periods of
periodic/synchronous task sets. Thereafter, the idle periods canbe derived. The calculation halts when two consecutive values
and are found to be equal.Example F. 2: According to (A2) shown in Appendix II,
is the start time of the first busy period, i.e., .By (18), we can obtain that is the length of the timeinterval [1,28).2) Establishment of and : The virtual processors andare located in the idle periods of . Since the probabilistic
tasks have different SPs, and can be established automati-cally. All the tasks with hard (resp., soft) deadlines within arerunning in (resp., ). The developed agent can construct thehard deadlines accurately.
VI. FEASIBILITY RECONFIGURATIONS
In this section, the developed agent aims to satisfy the feasi-bility of the reconfigured PRTSs since the deadlines of all thetasks within the system may need to be reconstructed.
A. Deadline Construction of Periodic Tasks
According to [41], a periodic task set satisfies the followingcondition: if its corresponding synchronous task set with allrelease time being equal to 0 is feasible, then is feasible too.In , the processor busy period is the longest busy period [40].Moreover, George et al. [40] show that the processor busy pe-riod does not depend on the scheduling algorithm. If is notschedulable, the first deadline violation happens in the processorbusy period [41]. In , the calculation of the processor busyperiod as detailed in Appendix III is necessary. In this case, ifall the tasks can satisfy the deadlines in the processor busy pe-riod, the tasks within is feasible. The absolute response time
of is defined as the actual time when its executionis finished. According to [17], , the WCRT of , can be con-sidered as its relative deadline.Property 1: The tasks within are feasible if ,
.In order to satisfy all the real-time constraints, before the
deadline modification, all the tasks are assumed to be syn-chronous, i.e., and . Let be a subsetof tasks in with higher or the same priorities than . Let
be a subset of tasks in with lower priorities than .Specifically, is located in if it satisfies the followingcondition: has a deadline that is equal to and
. Otherwise, it is located in .

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
8 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING
Fig. 4. Construction of the deadlines of periodic tasks.
In , let and be the workload demandsof the tasks and in the time interval
, respectively. Hence, we have
(19)
and
(20)
Theorem 3: Under EDF scheduling, the absolute responsetime satisfies .
Proof: The EDF scheduling algorithm assigns the highestpriority to the tasks with the earliest deadlines dynamically. Ata release time , job is released. It can be preempted byany job in , and preempt all the jobs in . For the taskswith higher priorities, i.e., , the workload demand
should be considered. For the tasks with lower pri-orities, i.e., , the latest requests should not be con-sidered. Since the EDF scheduling in this research is with a pre-emptive scheme, some jobs in may be pended at time .They cannot come back into the run queue before . Thus,the execution time of the tasks in before is less thanor equal to .In order to satisfy Property 1, the deadlines can be reconfig-
ured to be the maximal module of to ,i.e., , ,
(21)
Example G. 1: The deadlines of the six periodic tasks dis-cussed in Example A are revised to be 27, 2, 25, 39, 10, and 19,respectively. The scheduling result is shown in Fig. 4.
B. Deadline Construction of Hard Probabilistic Tasks
In order to modify the probabilistic tasks’ hard deadlines,their workload demands should be calculated. Similar to the pe-riodic tasks’ workload demands, the th workload demand ofprobabilistic tasks can be calculated by the sum of all the tasks’WCETs that request the processor in a time interval .Note that, not all the probabilistic tasks can be located in theidle period of periodic tasks if is greater than the cor-responding idle period. In order to simplify the calculation, if atask is preempted by , it can be considered as the first task inthe next idle period. The start time can be obtained by
(22)
Fig. 5. Workload demands of the tasks of .
All the workload demands of the probabilistic tasks can be cal-culated by the following iterative equation:
(23)
where , and
. The calculation halts when two consecu-
tive values and are found to be equal.Example G. 2: As shown in Fig. 5, in , the workload de-
mands of the probabilistic tasks discussed in Example A can becalculated, where and .After any RER scenario, the agent locates the probabilistic
tasks within in the memory. In this phase, it reconfiguresthe distributions of the tasks and adjusts the processor speeds.After the tasks enter the ready queue, the agent calculates theirresponse time, which is followed by constructing their dead-lines. In each busy period, , the deadline of the firsttask can be calculated by
(24)
The deadlines of the following tasks should be located in thenext idle period if is greater than , i.e.,
(25)Example G. 3: As shown in Fig. 5, in Example A
are in the workload demand . Consequently, we have. By applying (24), we obtain:
• ;• ; and• .is achieved after all the RAR applications, which is fea-
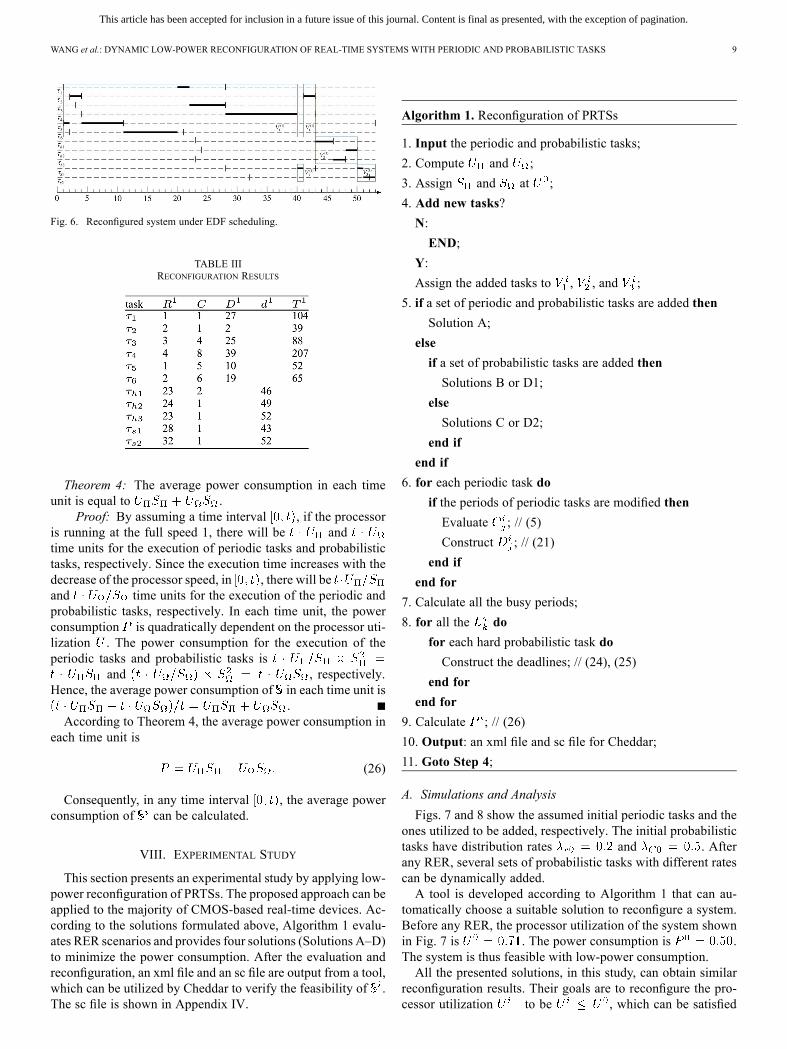
sible with low-power consumption. The scheduling result isshown in Fig. 6. The reconfiguration result is shown in Table III.
VII. POWER CONSUMPTION
This work assumes that is running at the periodic-speed. Moreover, since and are unpredictable, they are run-
ning at a same probabilistic-speed .
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
WANG et al.: DYNAMIC LOW-POWER RECONFIGURATION OF REAL-TIME SYSTEMS WITH PERIODIC AND PROBABILISTIC TASKS 9
Fig. 6. Reconfigured system under EDF scheduling.
TABLE IIIRECONFIGURATION RESULTS
Theorem 4: The average power consumption in each timeunit is equal to .
Proof: By assuming a time interval , if the processoris running at the full speed 1, there will be andtime units for the execution of periodic tasks and probabilistictasks, respectively. Since the execution time increases with thedecrease of the processor speed, in , there will beand time units for the execution of the periodic andprobabilistic tasks, respectively. In each time unit, the powerconsumption is quadratically dependent on the processor uti-lization . The power consumption for the execution of theperiodic tasks and probabilistic tasks is
and , respectively.Hence, the average power consumption of in each time unit is
.According to Theorem 4, the average power consumption in
each time unit is
(26)
Consequently, in any time interval , the average powerconsumption of can be calculated.
VIII. EXPERIMENTAL STUDY
This section presents an experimental study by applying low-power reconfiguration of PRTSs. The proposed approach can beapplied to the majority of CMOS-based real-time devices. Ac-cording to the solutions formulated above, Algorithm 1 evalu-ates RER scenarios and provides four solutions (Solutions A–D)to minimize the power consumption. After the evaluation andreconfiguration, an xml file and an sc file are output from a tool,which can be utilized by Cheddar to verify the feasibility of .The sc file is shown in Appendix IV.
Algorithm 1. Reconfiguration of PRTSs
1. Input the periodic and probabilistic tasks;
2. Compute and ;
3. Assign and at ;
4. Add new tasks?
N:
END;
Y:
Assign the added tasks to , , and ;
5. if a set of periodic and probabilistic tasks are added then
Solution A;
else
if a set of probabilistic tasks are added then
Solutions B or D1;
else
Solutions C or D2;
end if
end if
6. for each periodic task do
if the periods of periodic tasks are modified then
Evaluate ; // (5)
Construct ; // (21)
end if
end for
7. Calculate all the busy periods;
8. for all the do
for each hard probabilistic task do
Construct the deadlines; // (24), (25)
end for
end for
9. Calculate ; // (26)
10. Output: an xml file and sc file for Cheddar;
11. Goto Step 4;
A. Simulations and Analysis
Figs. 7 and 8 show the assumed initial periodic tasks and theones utilized to be added, respectively. The initial probabilistictasks have distribution rates and . Afterany RER, several sets of probabilistic tasks with different ratescan be dynamically added.A tool is developed according to Algorithm 1 that can au-
tomatically choose a suitable solution to reconfigure a system.Before any RER, the processor utilization of the system shownin Fig. 7 is . The power consumption is .The system is thus feasible with low-power consumption.All the presented solutions, in this study, can obtain similar
reconfiguration results. Their goals are to reconfigure the pro-cessor utilization to be , which can be satisfied

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
10 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING
Fig. 7. Initial periodic tasks.
Fig. 8. Added periodic tasks.
well. Hence, the gains are independent of the considered sce-narios. As shown in Fig. 9, by considering different reconfigu-ration solutions, the power consumption remains unchanged orreduced. Solutions D-1 and D-2 represent the two applicationsof Solution D, respectively. As shown in Fig. 9(a), is in theinterval [0.4992,0.4997] and its variation can be ignored. Thus,we conclude that they can guarantee that the low-power con-sumption level remains unchanged. Specially, Solution B cankeep the power consumption without variation. As shown inFig. 9(b), the power consumption is between 0.44 and 0.485.This theoretical simulation result by Solution C provides morebenefits than the other four solutions.In the simulation study of Solution A, we add each time a
set of periodic tasks and a set of probabilistic tasks (which canbe empty). The power consumption varies, as shown in the firsthalf of the corresponding curve, if the added periodic tasks ineach RER are different from others. If we add the same peri-odic tasks and arbitrary sets of probabilistic tasks in each RER,the power consumption after the RAR implementation remainsunchanged. As shown in the second half of the corresponding
Fig. 9. Simulation results.
curve in Fig. 9(a), the theoretical simulation result of the powerconsumption is a horizontal straight line. By considering So-lutions A and B, we conclude that the reduction of the powerconsumption depends on the modifications of the periodic tasks.The developed tool can keep the power consumption unchangedor decrease it.
B. Comparison With Previous Approaches
The approach presented in [6] is to apply DVS on proces-sors with discrete voltage/frequency models, by modifying theperiods of periodic tasks, in which only the periodic tasks withthe same task utilization are considered. This study considersPRTSs that process both periodic and probabilistic tasks. Byconsidering reconfiguration form B (addition of periodic tasksonly), the presented approach can obtain a smoother processorspeed than the contribution in [6].Probabilistic tasks are not considered in [6]. In order to com-
pare with its approach, the PRTS is considered to process peri-odic tasks only. Consequently, the initial processor utilization is
that is the utilization of the 50 periodic tasks depictedin Fig. 7. Since the gains of the presented solutions are indepen-dent of the considered scenarios, Solution A is selected. In orderto illustrate the gain of PRTS with different , the periods of
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
WANG et al.: DYNAMIC LOW-POWER RECONFIGURATION OF REAL-TIME SYSTEMS WITH PERIODIC AND PROBABILISTIC TASKS 11
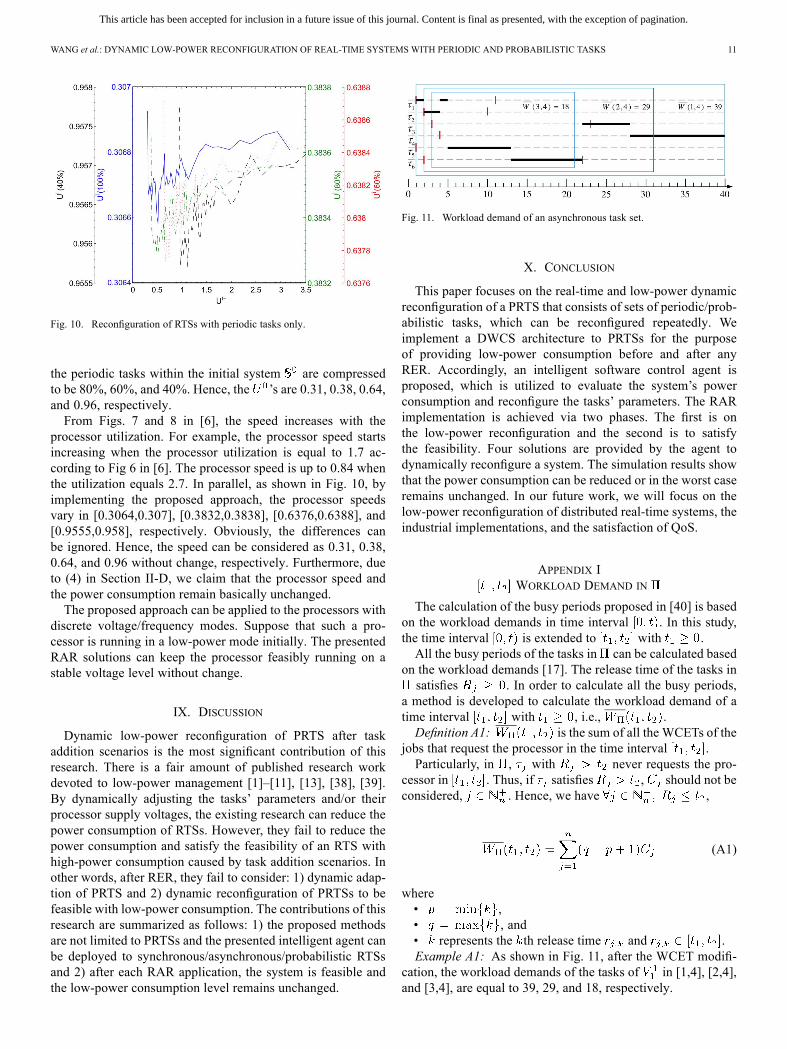
Fig. 10. Reconfiguration of RTSs with periodic tasks only.
the periodic tasks within the initial system are compressedto be 80%, 60%, and 40%. Hence, the ’s are 0.31, 0.38, 0.64,and 0.96, respectively.From Figs. 7 and 8 in [6], the speed increases with the
processor utilization. For example, the processor speed startsincreasing when the processor utilization is equal to 1.7 ac-cording to Fig 6 in [6]. The processor speed is up to 0.84 whenthe utilization equals 2.7. In parallel, as shown in Fig. 10, byimplementing the proposed approach, the processor speedsvary in [0.3064,0.307], [0.3832,0.3838], [0.6376,0.6388], and[0.9555,0.958], respectively. Obviously, the differences canbe ignored. Hence, the speed can be considered as 0.31, 0.38,0.64, and 0.96 without change, respectively. Furthermore, dueto (4) in Section II-D, we claim that the processor speed andthe power consumption remain basically unchanged.The proposed approach can be applied to the processors with
discrete voltage/frequency modes. Suppose that such a pro-cessor is running in a low-power mode initially. The presentedRAR solutions can keep the processor feasibly running on astable voltage level without change.
IX. DISCUSSION
Dynamic low-power reconfiguration of PRTS after taskaddition scenarios is the most significant contribution of thisresearch. There is a fair amount of published research workdevoted to low-power management [1]–[11], [13], [38], [39].By dynamically adjusting the tasks’ parameters and/or theirprocessor supply voltages, the existing research can reduce thepower consumption of RTSs. However, they fail to reduce thepower consumption and satisfy the feasibility of an RTS withhigh-power consumption caused by task addition scenarios. Inother words, after RER, they fail to consider: 1) dynamic adap-tion of PRTS and 2) dynamic reconfiguration of PRTSs to befeasible with low-power consumption. The contributions of thisresearch are summarized as follows: 1) the proposed methodsare not limited to PRTSs and the presented intelligent agent canbe deployed to synchronous/asynchronous/probabilistic RTSsand 2) after each RAR application, the system is feasible andthe low-power consumption level remains unchanged.
Fig. 11. Workload demand of an asynchronous task set.
X. CONCLUSION
This paper focuses on the real-time and low-power dynamicreconfiguration of a PRTS that consists of sets of periodic/prob-abilistic tasks, which can be reconfigured repeatedly. Weimplement a DWCS architecture to PRTSs for the purposeof providing low-power consumption before and after anyRER. Accordingly, an intelligent software control agent isproposed, which is utilized to evaluate the system’s powerconsumption and reconfigure the tasks’ parameters. The RARimplementation is achieved via two phases. The first is onthe low-power reconfiguration and the second is to satisfythe feasibility. Four solutions are provided by the agent todynamically reconfigure a system. The simulation results showthat the power consumption can be reduced or in the worst caseremains unchanged. In our future work, we will focus on thelow-power reconfiguration of distributed real-time systems, theindustrial implementations, and the satisfaction of QoS.
APPENDIX IWORKLOAD DEMAND IN
The calculation of the busy periods proposed in [40] is basedon the workload demands in time interval . In this study,the time interval is extended to with .All the busy periods of the tasks in can be calculated based
on the workload demands [17]. The release time of the tasks insatisfies . In order to calculate all the busy periods,
a method is developed to calculate the workload demand of atime interval with , i.e., .Definition A1: is the sum of all the WCETs of the
jobs that request the processor in the time interval .Particularly, in , with never requests the pro-
cessor in . Thus, if satisfies , should not beconsidered, . Hence, we have ,
(A1)
where• ,• , and• represents the th release time and .Example A1: As shown in Fig. 11, after the WCET modifi-
cation, the workload demands of the tasks of in [1,4], [2,4],and [3,4], are equal to 39, 29, and 18, respectively.
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
12 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING
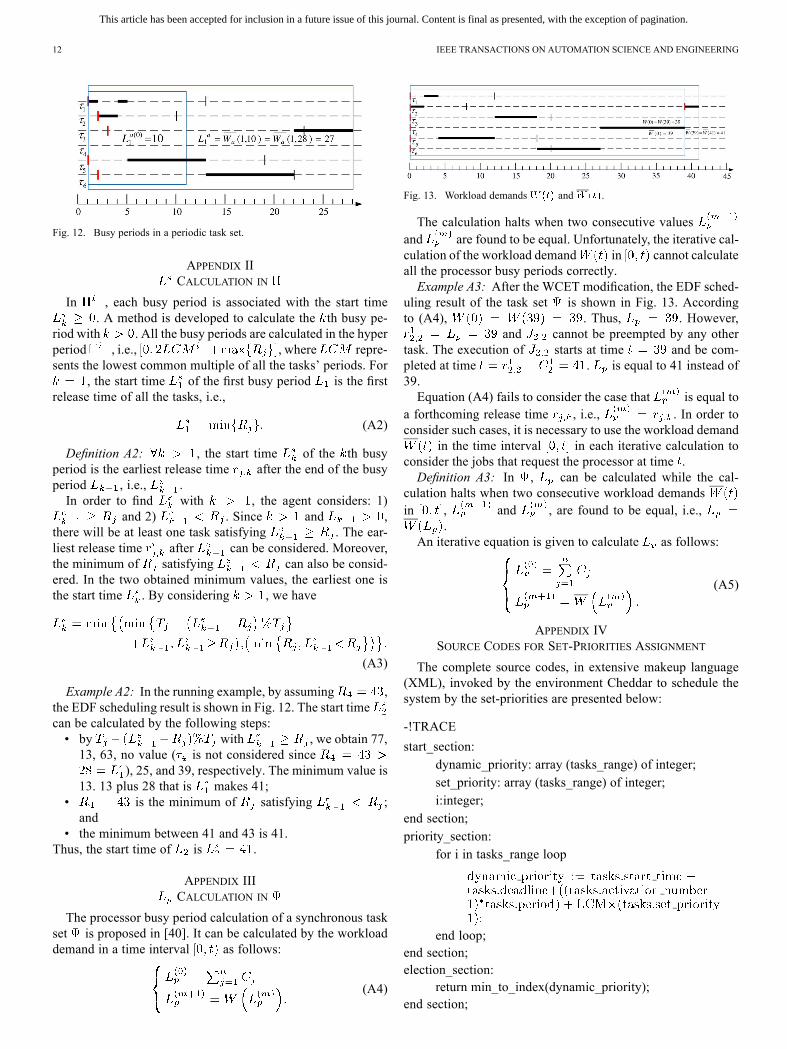
Fig. 12. Busy periods in a periodic task set.
APPENDIX IICALCULATION IN
In , each busy period is associated with the start time. A method is developed to calculate the th busy pe-
riod with . All the busy periods are calculated in the hyperperiod , i.e., , where repre-sents the lowest common multiple of all the tasks’ periods. For
, the start time of the first busy period is the firstrelease time of all the tasks, i.e.,
(A2)
Definition A2: , the start time of the th busyperiod is the earliest release time after the end of the busyperiod , i.e., .In order to find with , the agent considers: 1)
and 2) . Since and ,there will be at least one task satisfying . The ear-liest release time after can be considered. Moreover,the minimum of satisfying can also be consid-ered. In the two obtained minimum values, the earliest one isthe start time . By considering , we have
(A3)
Example A2: In the running example, by assuming ,the EDF scheduling result is shown in Fig. 12. The start timecan be calculated by the following steps:• by with , we obtain 77,13, 63, no value ( is not considered since
), 25, and 39, respectively. The minimum value is13. 13 plus 28 that is makes 41;
• is the minimum of satisfying ;and
• the minimum between 41 and 43 is 41.Thus, the start time of is .
APPENDIX IIICALCULATION IN
The processor busy period calculation of a synchronous taskset is proposed in [40]. It can be calculated by the workloaddemand in a time interval as follows:
(A4)
Fig. 13. Workload demands and .
The calculation halts when two consecutive valuesand are found to be equal. Unfortunately, the iterative cal-culation of the workload demand in cannot calculateall the processor busy periods correctly.Example A3: After the WCET modification, the EDF sched-
uling result of the task set is shown in Fig. 13. Accordingto (A4), . Thus, . However,
and cannot be preempted by any othertask. The execution of starts at time and be com-pleted at time . is equal to 41 instead of39.Equation (A4) fails to consider the case that is equal to
a forthcoming release time , i.e., . In order toconsider such cases, it is necessary to use the workload demand
in the time interval in each iterative calculation toconsider the jobs that request the processor at time .Definition A3: In , can be calculated while the cal-
culation halts when two consecutive workload demandsin , and , are found to be equal, i.e.,
.An iterative equation is given to calculate as follows:
(A5)
APPENDIX IVSOURCE CODES FOR SET-PRIORITIES ASSIGNMENT
The complete source codes, in extensive makeup language(XML), invoked by the environment Cheddar to schedule thesystem by the set-priorities are presented below:
-!TRACE
start_section:dynamic_priority: array (tasks_range) of integer;set_priority: array (tasks_range) of integer;i:integer;
end section;priority_section:
for i in tasks_range loop
end loop;end section;election_section:
return min_to_index(dynamic_priority);end section;

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
WANG et al.: DYNAMIC LOW-POWER RECONFIGURATION OF REAL-TIME SYSTEMS WITH PERIODIC AND PROBABILISTIC TASKS 13
REFERENCES
[1] Y. Shin and K. Choi, “Power conscious fixed priority scheduling forhard real-time systems,” in Proc. IEEE Des. Autom. Conf., New Or-leans, LA, USA, Jun. 1999, pp. 134–139.
[2] G. Quan and X. S. Hu, “Minimal energy fixed-priority scheduling forvariable voltage processors,” IEEE Trans. Comput.-Aid. Des. Integ.Circu. Syst., vol. 22, no. 8, pp. 1062–1071, Aug. 2003.
[3] H. Yun and J. Kim, “On energy-optimal voltage scheduling for fixed-priority hard real-time systems,” ACM Trans. Emb. Comput. Syst., vol.2, no. 3, pp. 393–430, 2003.
[4] F. Yao, A. Demers, and S. Shenker, “A scheduling model for reducedCPU energy,” in Proc. 36th IEEE Annu. Symp. Found. Comput. Sci.,Oct. 1995, pp. 374–382.
[5] B. Gaujal and N. Navet, “Dynamic voltage scaling under EDF revis-ited,” Real-Time Syst., vol. 37, no. 1, pp. 77–97, Oct. 2007.
[6] M.Marinoni and G. Buttazzo, “Elastic DVSmanagement in processorswith discrete voltage/frequency modes,” IEEE Trans. Ind. Informat.,vol. 3, no. 1, pp. 51–62, Feb. 2007.
[7] J. Mei, K. Li, J. Hu, S. Yin, and H.-M. S. Edwin, “Energy-aware pre-emptive scheduling algorithm for sporadic tasks on DVS platform,”Microprocess. Microsyst., vol. 37, no. 1, pp. 99–112, 2013.
[8] X. Zhu, C. He, K. Li, and X. Qin, “Adaptive energy-efficient sched-uling for real-time tasks on DVS-enabled heterogeneous clusters,” J.Parallel Distrib. Comput., vol. 72, no. 6, pp. 751–763, 2012.
[9] T. Ishihara, “A multi-performance processor for reducing the energyconsumption of real-time embedded systems,” IEICE Trans. Fund.Electr., Commu. Comp. Sci., vol. E93-A, no. 12, pp. 2533–2541, 2010.
[10] S. Kim, “Adaptive online voltage scaling scheme based on the nashbargaining solution,” ETRI Journal, vol. 33, no. 3, pp. 407–414, Jun.2011.
[11] T. Yokoyama, G. Zeng, H. Tomiyama, and H. Takada, “Static taskscheduling algorithms based on greedy heuristics for battery-poweredDVS systems,” IEICE Trans. Inform. Syst., vol. E93D, no. 8, pp.2737–2746, 2010.
[12] Y. Zhu and F. Mueller, “Feedback EDF scheduling of real-time tasksexploiting dynamic voltage scaling,” Real-Time Syst., vol. 31, no. 1–3,pp. 33–63, 2005.
[13] S. K. Pradhan and B. Subudhi, “Real-time adaptive control of a flexiblemanipulator using reinforcement learning,” IEEE Trans. Autom. Sci.Eng., vol. 9, no. 2, pp. 237–249, Apr. 2012.
[14] D. Zhu, R. Melhem, and D. Mosse, “The effects of energy manage-ment on reliability in real-time embedded systems,” in Proc. Int. Conf.Comp.-Aid. Des., 2004, pp. 35–40.
[15] C. A. Rusu, R. Melhem, and D. Mosse, “Maximizing the system valuewhile satisfying time and energy constraints,” IBM J. Res. Develop.,vol. 47, no. 5–6, pp. 689–702, Sep. 2003.
[16] E. Camponogara, A. B. de Oliveira, and G. Lima, “Optimization-baseddynamic reconfiguration of real-time schedulers with support for sto-chastic processor consumption,” IEEE Trans. Ind. Informat., vol. 6, no.4, pp. 594–609, Nov. 2010.
[17] L. George and P. Courbin, “Reconfiguration of uniprocessor sporadicreal-time systems: The sensitivity approach,” in Book Chapter in IGI-Global Knowledge on Reconfigurable Embedded Control Systems: Ap-plications for Flexibility and Agility. Hershey, PA, USA: IGI Global,2011.
[18] X. Wang, M. Khalgui, and Z. W. Li, “Dynamic low power reconfigura-tions of real-time embedded systems,” in Proc. 1st Pervas. EmbeddedComput. Commun. Syst., Algarve, Portugal, Mar. 2011, pp. 415–420.
[19] M. Khalgui, O. Mosbahi, Z. W. Li, and H.-M. Hanisch, “Reconfig-urable multiagent embedded control systems: From modeling to im-plementation,” IEEE Trans. Comput., vol. 60, no. 4, pp. 538–551, Apr.2011.
[20] H. C. Lau, Z. J. Zhao, S. S. Ge, and T. H. Lee, “Allocating resourcesin multiagent flowshops with adaptive auctions,” IEEE Trans. Autom.Sci. Eng., vol. 8, no. 4, pp. 732–743, Oct. 2011.
[21] S. Lee, “Fairness, stability and optimality of adaptive multiagent sys-tems: Interaction through resource sharing,” IEEE Trans. Autom. Sci.Eng., vol. 7, no. 3, pp. 427–439, Jul. 2010.
[22] C. Angelov, K. Sierszecki, and N. Marian, L. T. Yang, Ed. et al., “De-sign models for reusable and reconfigurable state machines,” in Proc.Embedded Ubiquitous Comput., 2005, pp. 152–163.
[23] J. F. Zhang, M. Khalgui, Z. W. Li, O. Mosbahi, and A. M. Al-Ahmari,“R-TNCES: A novel formalism for reconfigurable discrete event con-trol systems,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 43, no. 4, pp.757–772, Jul. 2013.
[24] W. Wang, S. Ranka, and P. Mishra, “Energy-aware dynamic recon-figuration algorithms for real-time multitasking systems,” SustainableComp.: Inform. Syst., vol. 1, no. 1, pp. 35–45, 2011.
[25] L. W. Niu, “Energy efficient scheduling for real-time embedded sys-tems with QoS guarantee,” Real-Time Syst., vol. 47, no. 2, pp. 75–108,2011.
[26] G. Liu, C. Jiang, M. Zhou, and P. Xiong, “Interactive Petri nets,” IEEETrans. Syst. Man Cybern.: Syst., vol. 43, no. 2, pp. 291–302,Mar. 2013.
[27] S. Liu, H. Cao, L. Li, and M. C. Zhou, “Predicting stay time of mobileusers with contextual information,” IEEE. Trans. Autom. Sci. Eng., vol.10, no. 4, pp. 1026–1036, Oct. 2013.
[28] P. Wang, Z. Ding, C. Jiang, and M. C. Zhou, “A web service basedpublic-oriented personalized health care platform,” IEEE Trans. Syst.Man Cybern.: Syst., vol. 43, no. 4, pp. 941–957, Jul. 2013.
[29] Y. Wu, C. Yan, Z. Ding, G. Liu, P. Wang, C. Jiang, and M. C. Zhou, “Anovel method for calculating service reputation,” IEEE Trans. Autom.Sci. Eng., vol. 10, no. 3, pp. 634–642, Jul. 2013.
[30] W. Y. Yu, C. G. Yan, Z. J. Ding, C. J. Jiang, and M. C. Zhou, “Mod-eling and validating E-commerce business process based on Petri nets,”IEEE Trans. Syst. Man Cybern.: Syst., vol. 44, no. 3, pp. 327–341, Mar.2014.
[31] R.West and K. Schwan, “Dynamic window-constrained scheduling formultimedia applications,” in Proc. IEEE 6th Int. Conf. Mult. Comp.Syst., June 1999, vol. 2, pp. 87–91.
[32] L. Sha, T. Abdelzaher, K. E. Årzén, A. Cervin, T. Baker, A. Burns,G. Buttazzo, M. Caccamo, J. Lehoczky, and A. K. Mok, “Real timescheduling theory: A historical perspective,” Real-Time Syst., vol. 28,no. 2, pp. 101–155, 2004.
[33] U. N. Bhat, An Introduction to Queueing Theory. Cambridge, MA,USA: Birkhäuser, 2008.
[34] I. Khemaissia, O. Mosbahi, M. Khalgui, and W. Bouzayen, “Newreconfigurable middleware for feasible adaptive RT-Linux,” in Proc.4th Pervas. Embedded Comput. Commun. Syst., Lisbon, Portugal, Jan.2014, pp. 158–167.
[35] F. Singhoff, J. Legrand, L. Nana, and L. Marce, “Cheddar: A flexiblereal time scheduling framework,” in Proc. Int. ACM SIGAda Conf.,2004, pp. 1–8.
[36] C. L. Liu and J.W. Layland, “Scheduling algorithms for multiprogram-ming in a hard real time environment,” J. Assoc. Comput. Mach., vol.20, no. 1, pp. 46–61, Jan. 1973.
[37] S. Baruah and J. Goossens, , J. Y.-T. Leung, Ed., “Scheduling real-timetasks: Algorithms and complexity,” in Handbook of Scheduling: Algo-rithms, Models, and Performance Analysis. London, U.K.: ChapmanHall, 2004.
[38] B. Zhai, D. Blaauw, D. Sylvester, and K. Flautner, “Theoretical andpractical limits of dynamic voltage scaling,” in Proc. 41st Des. Autom.Conf., 2004, pp. 868–873.
[39] K. Li, “Energy efficient scheduling of parallel tasks on multiprocessorcomputers,” J. Supercomputing, vol. 60, no. 2, pp. 223–247.
[40] L. George, N. Rivierre, andM. Spuri, “Preemptive and non-preemptivescheduling real-time uniprocessor scheduling,” INRIA Res. Rep. 2966,Sep. 1996.
[41] S. Baruah, R. Howell, and L. Rosier, “Algorithms and complexity con-cerning the preemptive scheduling of periodic real-time tasks on oneprocessor,” Real-Time Syst., vol. 2, pp. 301–324, 1990.
[42] J. F. Hermant and L. George, “An optimal approach to determine theminimum architecture for real-time embedded systems scheduled byEDF,” Syst. Inform. Sci. Notes, vol. 2, pp. 78–81, Sept. 2007.
[43] L. Abeni and G. Buttazzo, “Resource reservation in dynamic real-timesystems,” Real-Time Syst., vol. 27, no. 2, pp. 123–167, Jul. 2004.
Xi Wang received the B.S. degree in automationfrom Liren College, Yanshan University, Qin-huangdao, China, in 2008, and the M.S. degreein mechanical-electronic engineering from XidianUniversity, Xi’an, China, in 2011. He is pursuing hisPh.D. degree at the School of Electro-MechanicalEngineering, Xidian University. He is currently avisiting Ph.D. student at the Systems Control Group,Department of Electrical and Computer Engineering,University of Toronto, Toronto, ON, Canada.His research interests include dynamic low-power
reconfiguration of real-time systems and supervisory control of discrete-eventsystems.

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
14 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING
Imen Khemaissia was born in Jendouba, Tunisia, in1988. She received the M.S. degree in parallel con-trol systems from Tunis El-Manar University, Tunis,Tunisia, in 2012. She is currently working towardsthe Ph.D. degree at the Computer Lab for IndustrialSystems, National Institute of Applied Science andTechnology (INSAT).Her main research interest is in the dynamic low-
power reconfiguration of real-time systems.
Mohamed Khalgui received the B.S. degree in com-puter science from Tunis University, Tunis, Tunisia,in 2001, and the M.S. degree in telecommunicationand services from Henri Poincaré University, Nancy,France, in 2003. He did research in computer scienceat the Institut National de Recherche en Infor-matique et en Automatique, Nancy and receivedthe Ph.D. degree from the National PolytechnicInstitute of Lorraine, Lorraine, Nancy, in 2007.Owing to a Humboldt grant, he did research incomputer science at the Martin Luther University of
Halle–Wittenberg, Halle, Germany, and received the Habilitation Diploma ininformation technology in 2012.He is currently an Associate Professor at the University of Carthage, Tunis,
Tunisia.
ZhiWu Li (M’06–SM’07) received the B.S., M.S.,and Ph.D. degrees in mechanical engineering,automatic control, and manufacturing engineering,respectively, all from Xidian University, Xi’an,China, in 1989, 1992, and 1995, respectively.He joined Xidian University in 1992, where he is
currently a Professor with the School of Electro-Me-chanical Engineering and the Director of the SystemsControl and Automation Group. From June 2002 toJuly 2003, he was a Visiting Professor at the SystemsControl Group, Department of Electrical and Com-
puter Engineering, University of Toronto, Toronto, ON, Canada. From Feb-ruary 2007 to February 2008, he was a Visiting Scientist at the Laboratory forComputer-Aided Design (CAD) and Lifecycle Engineering, Department of Me-chanical Engineering, Technion-Israel Institute of Technology, Technion City,Haifa, Israel. From November 2008 to October 2010, he was a Visiting Pro-fessor with the Automation Technology Laboratory, Institute of Computer Sci-ence, Martin-Luther University of Halle-Wittenburg, Halle (Saale), Germany.He was a Senior Visiting Scientist at the Conservatoire National des Arts etMétiers (CNAM), Paris, France, supported by the program Research in Paris in2010 and the Cai YuanPei Program in 2012. He serves as a host Professor ofthe ChangJiang Scholars Program, the Thousand Foreign Talents Program, andthe Research Fellowship for International Young Scientists, National NaturalScience of Foundation of China. He is the author or coauthor of over 200 publi-cations including two book chapters in Deadlock Resolution in Computer-Inte-grated Systems (Marcel Dekker, 2005) and in Reconfigurable Embedded Con-trol Systems: Applications for Flexibility and Agility (IGI Global Press, 2011).He is a coauthor with M. C. Zhou, Deadlock Resolution in Automated Manu-facturing Systems: A Novel Petri Net Approach (Springer, 2009) andModeling,Analysis and Deadlock Control in Automated Manufacturing Systems (Beijing,2009, in Chinese), and with Y. F. Chen, Optimal Supervisory Control of Auto-mated Manufacturing Systems (CRC Press, 2012). He is a Co-Editor with Prof.A. Al-Ahmari of a book Formal Methods in Manufacturing: Recent Advances(IGI Global 2012). His current research interests include Petri net theory andapplication, supervisory control of discrete-event systems, workflow modelingand analysis, systems integration, embedded control systems, and smart grid.Dr. Li is a recipient of Alexander von Humboldt Research Grant, Alexander
von Humboldt Foundation, Germany He was the General Co-Chair of theIEEE International Conference on Automation Science and Engineering,August 23–26, Washington, DC, 2008. He was a Financial Co-Chair of theIEEE International Conference on Networking, Sensing, and Control, March26–29, 2009, a member of the International Advisory Committee, the 10th
International Conference on Automation Technology, June 27–29, 2009, aCo-Chair of the program committee of the IEEE International Conferenceon Mechatronics and Automation, August 24–27, 2010, and a member ofthe program committees of many international conferences. He served asan Associate Editor of the IEEE TRANSACTIONS ON AUTOMATION SCIENCEAND ENGINEERING (2008–2013) and the IEEE TRANSACTIONS ON SYSTEMS,MAN, AND CYBERNETICS, PART A: SYSTEMS AND HUMANS (2011–2012),and is currently serving as an Associate Editor of the IEEE TRANSACTIONSON SYSTEMS, MAN, AND CYBERNETICS: SYSTEMS (2013–2014), InformationSciences (2014–), the International Journal of Discrete Event Control Sys-tems, the IST Transactions of Robotics, Automation & Mechatronics-Theory& Applications, and IST Transactions of Control Engineering-Theory andApplications. He is a Guest Editor of a Special Issue on “Petri Nets for SystemControl Automation” in the Asian Journal of Control, a Special Issue on“Petri Nets and Agile Manufacturing” in the Transactions of the Institute ofMeasurement and Control, and a Special Issue on “Modeling and Verificationof Discrete Event Systems” in the ACM Transactions on Embedded ComputingSystems. He is a member of the Discrete Event Systems Technical Committeeof the IEEE SYSTEMS, MAN, AND CYBERNETICS SOCIETY, and a memberof the IFAC Technical Committee on Discrete Event and Hybrid Systems(2011–2014). He serves as a frequent reviewer for more than 30 internationaljournals including a number of the IEEE TRANSACTIONS, as well as manyinternational prestigious conferences. He was listed in Marquis Who’s Who inthe World, 27th Ed., 2010. He is the Founding Chair of Xi’an Chapter of IEEESystems, Man, and Cybernetics Society.
Olfa Mosbahi received the B.S. degree in computerscience and the M.S. degree from Tunis University,Tunis, Tunisia, in 1999 and 2002, respectively.She did research in computer science at the InstitutNational de Recherche en Informatique et en Au-tomatique (INRIA), Nancy, France, and received thePh.D. degree from the National Polytechnic Instituteof Lorraine, Nancy, France, in 2008.She was a Part-Time Researcher at INRIA, France,
and a temporary Lecturer at Nancy II University. Shewas also a Researcher at Martin Luther University,
Germany. She is an Assistant Professor of Computer Science at the INSAT In-stitute, Carthage University, Tunisia. She is active in several European Projectsand also in other interesting international collaborations.
MengChu Zhou (S’88–M’90–SM’93–F’03) re-ceived the B.S. degree in control engineeringfrom the Nanjing University of Science and Tech-nology, Nanjing, China, in 1983, the M.S. degreein automatic control from the Beijing Institute ofTechnology, Beijing, China, in 1986, and the Ph.D.degree in computer and systems engineering fromthe Rensselaer Polytechnic Institute, Troy, NY, USA,in 1990.He joined the New Jersey Institute of Technology
(NJIT), Newark, NJ, USA, in 1990, and is now a Dis-tinguished Professor of Electrical and Computer Engineering. He is presently aProfessor with Tongji University, Shanghai, China. His research interests are inPetri nets, sensor networks, web services, automation, big data, transportationand energy systems. He has over 500 publications including 11 books, 250+journal papers (majority in IEEE TRANSACTIONS), and 22 book-chapters.Dr. Zhou is a Life Member of the Chinese Association for Science and Tech-
nology-USA and served as its President in 1999. He is Fellow of IFAC andthe American Association for the Advancement of Science (AAAS). He is thefounding Editor of the IEEE Press Book Series on “Systems Science and En-gineering,” and Associate Editor of the IEEE TRANSACTIONS ON SYSTEMS,MAN AND CYBERNETICS: SYSTEMS, the IEEE TRANSACTIONS ON INDUSTRIALINFORMATICS, and the IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATIONSYSTEMS.