
düşük gerilimli değişken akım çıkışlı invertör tasarımı - Gazi ...
99
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of düşük gerilimli değişken akım çıkışlı invertör tasarımı - Gazi ...


DÜŞÜK GERİLİMLİ DEĞİŞKEN AKIM ÇIKIŞLI İNVERTÖR TASARIMI
VE UYGULAMASI
Erol CAN
DOKTORA TEZİ
ELEKTRİK EĞİTİMİ ANABİLİM DALI
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
ŞUBAT 2016

Erol CAN tarafından hazırlanan “ DÜŞÜK GERİLİMLİ DEĞİŞKEN AKIM ÇIKIŞLI
İNVERTÖR TASARIMI VE UYGULAMASI.” adlı tez çalışması aşağıdaki jüri tarafından OY
BİRLİĞİ ile Gazi Üniversitesi Elektrik Eğitimi Anabilim Dalında DOKTORA TEZİ olarak kabul
edilmiştir.
Danışman: Yrd. Doç. Dr. Hasan Hüseyin SAYAN
Elektrik-Elektronik Mühendisliği, Gazi Üniversitesi
Bu tezin, kapsam ve kalite olarak Doktora Tezi olduğunu onaylıyorum
....………….……..
Başkan: Doç. Dr. İlhan KOŞALAY
Elektrik-Elektronik Mühendisliği, Üniversite Adı
Bu tezin, kapsam ve kalite olarak Doktora Tezi olduğunu onaylıyorum
.…………….…….
Üye: Doç. Dr. Nihat ÖZTÜRK
Elektrik-Elektronik Mühendisliği,Gazi Üniversitesi
Bu tezin, kapsam ve kalite olarak Doktora Tezi olduğunu onaylıyorum
...……….………...
Üye : Doç. Dr. Uğur GÜVENÇ
Elektrik-Elektronik Mühendisliği, Düzce Üniversitesi
Bu tezin, kapsam ve kalite olarak Doktora Tezi olduğunu onaylıyorum
...…………………
Üye: Yrd. Doç. Dr. Ali SAYGIN
Elektrik-Elektronik Mühendisliği, Gazi Üniversitesi
Bu tezin, kapsam ve kalite olarak Doktora Tezi olduğunu onaylıyorum
...…………………
Tez Savunma Tarihi: 9/2/2016
Jüri tarafından kabul edilen bu tezin Doktora Tezi olması için gerekli şartları yerine getirdiğini
onaylıyorum.
Prof. Dr. Metin GÜRÜ
Fen Bilimleri Enstitüsü Müdürü

ETİK BEYAN
Gazi Üniversitesi Fen Bilimleri Enstitüsü Tez Yazım Kurallarına uygun olarak
hazırladığım bu tez çalışmasında;
Tez içinde sunduğum verileri, bilgileri ve dokümanları akademik ve etik kurallar
çerçevesinde elde ettiğimi,
Tüm bilgi, belge, değerlendirme ve sonuçları bilimsel etik ve ahlak kurallarına uygun
olarak sunduğumu,
Tez çalışmasında yararlandığım eserlerin tümüne uygun atıfta bulunarak kaynak
gösterdiğimi,
Kullanılan verilerde herhangi bir değişiklik yapmadığımı,
Bu tezde sunduğum çalışmanın özgün olduğunu,
bildirir, aksi bir durumda aleyhime doğabilecek tüm hak kayıplarını kabullendiğimi beyan
ederim.
Erol Can
9/2/2016

iv
DÜŞÜK GERİLİMLİ DEĞİŞKEN AKIM ÇIKIŞLI İNVERTÖR TASARIMI VE
UYGULAMASI
(Doktora Tezi)
Erol CAN
GAZİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
Şubat 2016
ÖZET
Bu tez çalışmasında, üç fazlı basamak sinüs darbe genişlik modülasyonu tarafından kontrol
edilen, düşük gerilimli ve değişken akım çıkışlı evirici devresinin tasarımı ve uygulaması
yapılmıştır. İlk olarak, invertör devresinin matematiksel modeli için gerekli matematiksel
eşitlikler, basamak sinüs darbe genişlik modülasyonuna göre hesaplandıktan sonra matris
formuna çevrilmiştir. Daha sonra, Matlab Simulink’te invertör devresiyle rezistif (R),
endüktif (L) yükler ve üç fazlı asenkron motor benzetimleri yapılmıştır. Uygulamada,
devrenin yapımı için ulaşılması kolay mikroçipler PIC 16F877A ve PIC 18F4550’ler, güç
devresi anahtarları olarak da mosfetler kullanılmıştır. Uygulama aşamasında invertör
devresiyle, rezistif (R) - endüktif (L) yük deneyleri ve üç fazlı asenkron motor deneyleri
yapılmıştır. Kullanılan PIC 16F877A, PIC 18F4550 kendi ailesinden gelen diğer düşük
frekanslı PIC’lere oranla daha yüksek performans göstermiştir. Ayrıca, PIC leri yalıtmak
için sürücü devresi düşük maliyetle tasarlanmıştır. Benzetim ve deneysel çalışmalar da
yükler üzerinde fazlar ve hatlar arası gerilimler kolaylıkla oluşturularak ölçü aletleriyle
ölçülmüştür. IEEE tarafından 1992 yılında getirilen IEEE 519-1992 nolu standart ve IEC
tarafından 1995 yılında getirilen IEC 100-3-2 gibi standartlar elektrik dağıtım şirketleri ve
müşterileri için akım harmonik değeri % 5 in altında olmasını belirtmiştir. Yükler üzerinde
oluşan gerilimler darbe genişlikleri şeklinde olduğundan, asenkron motorda ve diğer
yüklerde oluşan akımların harmonikleri ölçülmüştür. Ölçüm sonuçlarına göre harmonik
dağılımlarının kabul edilebilir seviye % 5 den daha düşük olduğu görüldü.
Bilim Kodu : 703.3.012
Anahtar Kelimeler : Basamak sinüs darbe genişlik modülasyonu, Matematiksel model,
PIC, Harmonik dağılım
Sayfa Adedi 80
Danışman : Yrd. Doç. Dr. H.Hüseyin SAYAN

v
VARIABLE CURRENT WITH LOW VOLTAGE INVERTER DESIGNING AND
APPLICATION
(Ph. D. Thesis)
Erol CAN
GAZİ UNIVERSITY
GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES
February 2016
ABSTRACT
In this thesis, low voltage and variable current output with design and application of the
inverter circuit controlled by the three-phase step-sinus pulse width modulation was
conducted. Firstly, mathematical equations were translated matrix form for new
mathematical model after the inverter circuit needing mathematical equations was
calculated according to step sinus the pulse width modulation. Then, simulation of inverter
circuit with resistive (R), inductive (L) loads and three-phase asynchronous motors were
performed at the Matlab Simulink. In implementation, Microchip PIC 16F877a and
microchip PIC 18f4550 s which are easy to reach were used for the construction of the
circuit. Power MOSFETs were used as switches of circuit. During the implementation
stage, experimentations of the inverter circuit with resistive (R), inductive (L) loads and
three-phase asynchronous motor were performed. Created line voltages and phases
voltages were measured by measuring instruments in the results of simulation and
experimental studies. Used PIC16F877A PIC 18f4550 showed higher performance than
other PIC from their families which have low frequencies. In addition, a driver circuit was
designed for insulation of PICs at low cost. The IEEE Standard No. 519-1992 introduced
by IEEE in 1992 and IEC 100-3-2 introduced by the IEC in 1995 stated harmonic value
of current must be lower than 5% for electricity distribution companies and customers.
Harmonics were measured in currents of induction motor and other loads because formed
voltages were pulse width form on loads. According to the measurement results harmonic
distortions was observed as acceptable level which is lower than %5.
Science Code : 703.3.012
Key Words : Step-sinus pulse width modulation, Mathematical model, PIC,
Harmonic distortions
Page Number : 80
Supervisor : Assist. Prof. Dr. H. Hüseyin SAYAN

vi
TEŞEKKÜR
Doktora tez çalışmam da danışmanlığımı üstlenen değerli hocam Yrd. Doç. Dr. Hasan
Hüseyin SAYAN’a katkı ve yönlendirmelerinden dolayı en içten teşekkürlerimi sunarım.
Ayrıca destek ve teşviklerinden dolayı, tez izleme komitesindeki değerli hocalarım Doç.
Dr. İlhan KOŞALAY, Yrd. Doç. Dr. Ali SAYGIN ve Gazi üniversitesi Öğretim
üyelerinden Doç. Dr. Yusuf SÖNMEZ’ e de teşekkür ederim.
Çalışmalarım süresince sürekli bana destek veren, üzerimdeki sorumlulukları elinden
geldiğince azaltmaya çalışan hayat arkadaşım biricik oğlumun annesi Merih CAN’a
yürekten teşekkür ediyorum. Yine tez çalışmalarım sırasında bana yardımlarını
esirgemeyen Erzincan Üniversitesindeki çalışma arkadaşlarıma da teşekkürlerimi sunarım.

vii
İÇİNDEKİLER
Sayfa
ÖZET .............................................................................................................................
iv
ABSTRACT ..................................................................................................................
v
TEŞEKKÜR ..................................................................................................................
vi
İÇİNDEKİLER ..............................................................................................................
vii
ÇİZELGELERİN LİSTESİ ........................................................................................... ix
ŞEKİLLERİN LİSTESİ ................................................................................................. x
RESİMLERİN LİSTESİ ................................................................................................
xi
SİMGELER VE KISALTMALAR ...............................................................................
xiii
1. GİRİŞ .....................................................................................................................
1
2. İNVERTÖR TASARIMI İÇİN YAPILAN ÇALIŞMALAR ..................
5
2.1. PWM .................................................................................................................
5
2.1.1. Klasik SPWM yöntemi ............................................................................
5
2.1.2. İki farklı büyüklükte üçgen ile üretilen SPWM yöntemi .........................
6
2.1.3. Basamak sinüs darbe genişlik modülasyon yöntemi ...............................
7
2.2. Üç Fazlı İnvertör ................................................................................................
11
2.2.1. RL yüklü üç fazlı invertör .......................................................................
11
2.2.2. RL yüklü üç fazlı invertörün matematiksel modeli ................................
12
2. 3. Üç Fazlı Asenkron Motor .................................................................................
18
2.4. Asenkron Motorun Alfa Beta Eksenlerine Göre Matematiksel Modeli ............
18
2. 5. Asenkron Motorun Eksen Dönüşümü...............................................................
22
2.5.1. Clarke dönüşümü ....................................................................................
22
2.5.2. Park dönüşümü .......................................................................................
24
2.5.3. Ters Park dönüşümü ...............................................................................
24

viii
2.5.4. Ters Clarke dönüşümü ............................................................................
Sayfa
25
3. İNVERTÖR DEVRESİ İÇİN YAPILAN BENZETİM
ÇALIŞMALARI .....................................................................................
27
3.1. Rezistif Endüktif ve 3 Fazlı Asenkron Motorun İnvertörle Benzetimi .............
27
3.2. Üç Fazlı İnvertörle Sürülen RL Yükün Toplam Harmonik Distorsiyonu .........
30
3.3. Üç Fazlı İnvertörle Asenkron Motorun Sürülmesinin Benzetimi ......................
30
3.4. Üç Fazlı İnvertörle Sürülen Asenkron Motorun
Toplam Harmonik Distorsiyonu .......................................................................
32
3.5. PWM’lere Göre Kontrol Edilen Yüklerin Karşılaştırılması ..............................
33
3.6. SPWM ve SSPWM’lere Göre Sürülen Dengesiz Yüklerin Karşılaştırılması ...
36
3.7. Harmonik Etkisi Artırılmış Yüklerin SPWM ve SSPWM’lere Göre
Sürülmesi ..........................................................................................................
39
4. FARKLI DENETLEYİCİLERLE YAPILAN KONTROLDE
SSPWM YÖNTEMİNİN UYGULANMASI ..............................................
45
4.1. Fuzzy Lojik (Bulanık Mantık) Kontrolör .........................................................
45
4.2. Oransal İntegral ve Türev Kontrolör ................................................................
48
4.3. Üç Fazlı Asenkron Motorun Benzetimi ............................................................
49
5. İNVERTÖR DEVRESİNİN GERÇEKLEMESİ .........................................
53
5.1. Üç fazlı İnvertör Gerçekleme Şekli ve Baskı Devresi .......................................
53
5.2. Üç Fazlı İnvertörle Omik ve İndüktif Yük Sürülmesi .......................................
54
5.3. Üç Fazlı İnvertörle 3 Fazlı Asenkron Motorun Sürülmesi ................................
56
5.4. Frekans Gerilim Devir İlişkilerini Veren Tablolar ............................................
60
5.4.1. 8Hz-20Hz ve 35V-90V değerler arasında oluşan devir ..........................
60
5.4.2. 25Hz-40Hz ve 35V-90V değerler arasında oluşan devir .........................
61
5.4.3. 45Hz-70Hz ve 35V-90V değerler arasında oluşan devir .........................
62

ix
5.4.4. 90Hz-150Hz ve 35-90V değerler arasında oluşan devir ......................................
Sayfa
63
5.5. Frekans Gerilim Devir İlişkilerini Veren Grafikler ...........................................
64
5.6. Üç Fazlı ASM’nin Dengesiz Faz Gerilimiyle Sürülmesi ..................................
67
5.6.1. Asenkron motorun 45Hz-70Hz ve 35V-90V değerler arasında
oluşan devirleri ........................................................................................
68
6. SONUÇ VE ÖNERİLER ...................................................................................
71
KAYNAKLAR ..............................................................................................................
73
ÖZGEÇMİŞ ...................................................................................................................
79

x
ÇİZELGELERİN LİSTESİ
Çizelge Sayfa
Çizelge 3.1. Farklı frekanslarda harmonik değerleri .....................................................
38
Çizelge 4.1. Üçlü fuzzy kural karar tablosu ..................................................................
46
Çizelge 4.2. Beşli fuzzy kural karar tablosu ..................................................................
47
Çizelge 5.1. 8Hz-20Hz frekans aralığında 3 fazlı asenkron motorun farklı
gerilimlerdeki devir değerleri ....................................................................
60
Çizelge 5.2. 25-40Hz frekans aralığında 3 fazlı asenkron motorun farklı
gerilimlerdeki devir değerleri ....................................................................
61
Çizelge 5.3. 45-70Hz frekans aralığında 3 fazlı asenkron motorun farklı
gerilimlerdeki devir değerleri ....................................................................
62
Çizelge 5.4. 90-150Hz frekans aralığında 3 fazlı asenkron motorun farklı
gerilimlerdeki devir değerleri ....................................................................
63
Çizelge 5.5. 40-70Hz frekans aralığında dengesiz faz gerilimli asenkron motorun
farklı gerilimlerdeki devir değerleri ...........................................................
60 60606666 68
Çizelge 5.6. İnvertör devresi için kullanılan elemanlar .................................................
70

xi
ŞEKİLLERİN LİSTESİ
Şekil Sayfa
Şekil 2.1. Üçgen ve sinüs sinyallerinin karşılaştırması.................................................
5
Şekil 2.2. Üç adet sinüs sinyalle farklı büyüklükte 2 üçgen sinyalin
karşılaştırılması .............................................................................................
6
Şekil 2.3. Üç adet sinüs sinyalle farklı büyüklükte 2 üçgen sinyalin
karşılaştırılması ile oluşan PWM ..................................................................
7
Şekil 2.4. Basamak Sinüs sinyalleri ile üçgen sinyalin karşılaştırılması ...................... 8
Şekil 2.5. a) S1 için PWM b) S2 için PWM c) S3 için PWM b) S4 için PWM e) S5
için PWM f) S6 için PWM ..........................................................................
8
Şekil 2.6. Basamak sinüs ile üçgen sinyalin karşılaştırılması .......................................
9
Şekil 2.7. Tek sayı artış gösteren PWM’ler için basamak sinüs ve üçgenlerin
karşılaştırılması .............................................................................................
10
Şekil 2.8. Tek sayı artış gösteren PWM’ler için üçgen benzerlikleri ...........................
11
Şekil 2.9. RL yüklü 3 fazlı invertör ..............................................................................
12
Şekil 2.10. Asenkron motorun alfa eksenini temsil eden eşdeğer devre .......................
19
Şekil 2.11. Asenkron motorun beta eksenini temsil eden eşdeğer devre .......................
19
Şekil 2.12. Stator vektör uzayı ve α-β eksenindeki bileşeni ..........................................
23
Şekil 2.12. Stator uzay vektörü α-β eksenindeki bileşeni ve dönen referans alandaki
d-q bileşenleri..............................................................................................
24
Şekil 3.1. Matlab Simulink’te 3 fazlı asenkron motorun benzetim şekli .....................
27
Şekil 3.2. Omik yüklü invertörün Matlab Simulink’de hatlar arası gerilimleri ............
28
Şekil 3.3. Omik yüklü ASM’nin Matlab Simulink’de faz gerilimleri ..........................
28
Şekil 3.4. Omik yüklü asenkron motorun Matlab Simulink’de faz akımları ................ 29
Şekil 3.5. RL yüklerin a) hatlar arası gerilimleri b) faz gerilimleri ..............................
29
Şekil 3.6. a) Üç fazlı invertörün faz akımları b) RL yük akımının harmonik
dağılımı .........................................................................................................
30

xii
Şekil 3.7. ASM’nin a) üç faz stator akımları b) rotor akımı .........................................
Sayfa
31
Şekil 3.8. ASM’nin 60 derece faz farklı hatlar arası gerilimleri b) faz gerilimi ........... 31
Şekil 3.9. 3 fazlı ASM’nin a) rotor devri b) elektro manyetik torku……...................
32
Şekil 3.10. 3 fazlı ASM’nin a) stator akımının harmonik dağılımı b) stator faz
akımı…………………………………………………………
32
Şekli 3.11. Üç fazlı invertörle RL yüklerin benzetim devre modeli ..............................
33
Şekil 3.12. Genel PWM yöntemiyle kontrol edilen yükler üzerindeki akımlar .............
34
Şekil 3.13. SSPWM yöntemiyle kontrol edilen yükler üzerindeki
akımlar .........................................................................................................
34
Şekil 3.14. İki farklı PWM yöntemiyle elde edilen yük akımlarının birlikte
görünümü .....................................................................................................
35
Şekil 3.15. Kare PWM yöntemlerine göre sürülen yükün a) akımı b) harmonik
dağılımı ........................................................................................................
35
Şekil 3.16. SSPWM yöntemine göre sürülen yükün a) akımı b) harmonik dağılımı ....
36
Şekil 3.17. SSPWM yöntemine göre elde edilen yük akımları......................................
36
Şekil 3.18. SPWM yöntemine göre elde edilen yük akımları ........................................
37
Şekil 3.19. SSPWM yöntemine göre elde edilen dengesiz yük akımının harmonik
dağılımı ........................................................................................................
37
Şekil 3.20. SSPWM yöntemine göre elde edilen dengesiz yük akımı ...........................
38
Şekil 3.21. SPWM yöntemine göre sürülen yükün a) akımını
b) harmonik dağılımı...................................................................................
38
Şekil 3.22. Dengesiz yüklerde SSPWM ve SPWM yöntemlerine göre
Farklı frekanslarda harmonik dağılımı .........................................................
39
Şekil 3.23. Doğrusal olmayan etkisi artırılmış 3 fazlı invertörün Matlab Simulink
modeli ..........................................................................................................
40
Şekil 3.24. SPWM’ in kontrol ettiği doğrusal olmayan etkisi artırılmış yükün
akımları ........................................................................................................
40

xiii
Şekil 3.25. SPWM yöntemine göre sürülen a) Ib yükün akımı b) harmonik dağılımı ..
Sayfa
41
Şekil 3.26. Doğrusal olmayan etkisi artırılmış yüklerin faz gerilimleri ........................
41
Şekil 3.27. SSPWM’ in kontrol ettiği doğrusal olmayan etkisi artırılmış yükün
akımları ........................................................................................................
42
Şekil 3.28. SSPWM yöntemine göre sürülen a) Ib yükün akımı b) akımın harmoniği .
42
Şekil 3.29. SSPWM ve SPWM yöntemine göre sürülen yüklerin akımları .................. 43
Şekil 3.30. SSPWM ve SPWM yöntemlerine göre frekanslarda harmonik dağılımı ....
43
Şekil 4.1. Hata ve hatanın değişimi ..............................................................................
46
Şekil 4.2. Beş kümeli üyeliklerin karşılaştırılmaları ..................................................... 47
Şekil 4.3. Hata ve hatanın değişiminin kurallar ile durulaştırmaya dönüşümünün
benzetim modeli ............................................................................................
48
Şekil 4.4. Asenkron motorun fuzzy lojik kontrolörlü benzetim modeli ....................... 49
Şekil 4.5. Farklı kontrol yöntemleriyle kontrol edilen asenkron motorun torkları .......
50
Şekil 4.6. Farklı kontrol yöntemleriyle kontrol edilen asenkron motorun stator
akımları .........................................................................................................
50
Şekil 4.7. Farklı kontrol yöntemleriyle kontrol edilen asenkron motorun rotor
akımları .........................................................................................................
51
Şekil 4.8. Farklı kontrol yöntemleriyle kontrol edilen asenkron motorun devirleri .....
52
Şekil 5.1. 3 fazlı invertör gerçekleme devre modeli .....................................................
53
Şekil 5.2. 3 fazlı invertörün uygulama devresi .............................................................
54
Şekil 5.3. RL yüklerin a) 100Hz de hatlar arası gerilimi ve devri
b) 50 Hz de hatlar arası gerilimi ...................................................................
54
Şekil 5.4. Klasik modülasyon uygulanan RL yükün hatlar arası sinüs geriliminin
akışı .............................................................................................................
55
Şekil 5.5. a) SSPWM yöntemiyle sürülen RL yükün sinüs gerilimi b) Genel PWM
yöntemiyle sürülen RL yükün sinüs gerilimi ................................................
55
xiv
Şekil 5.6. a) SSPWM yöntemiyle sürülen RL yükün iki faz sinüs gerilim akışı
b) Kare PWM yöntemiyle sürülen RL yükün iki faz sinüs gerilim akışı......
Sayfa
56
Şekil 5.7. ASM’nin a) 90Hz de hatlar arası gerilimi ve devri
b) 30 Hz de hatlar arası gerilimi ve devri
57
Şekil 5.8. ASM’nin a) fazlar arası gerilimi ve devri
b) hatlar arası gerilimi ve devri .....................................................................
57
Şekil 5.9. ASM’nin a) 58V-150Hz de hatlar arası gerilimlerin sinüs eğrisi ve devri
b) 55V-40Hz de hatlar arası gerilimlerin sinüs eğrisi ve devri .....................
58
Şekil 5.10. Motorun PWM şeklinde hatlar arası gerilimi ..............................................
58
Şekil 5.11. Asenkron motorun 67 Hz de hatlar arası iki faz sinüs gerilimi ...................
59
Şekil 5.12. Asenkron motorun hat geriliminin FFT değeri ...........................................
59
Şekil 5.13. 3 fazlı asenkron motorun a) 8Hz de gerilim devir değişimi b) 32Hz de
gerilim devir değişimi .................................................................................
64
Şekil 5.14. 3 fazlı asenkron motorun a) 40Hz de gerilim devir değişimi b) 45Hz de
gerilim devir değişimi .................................................................................
64
Şekil 5.15. 3 fazlı asenkron motorun a) 55Hz de gerilim devir değişimi b) 70Hz de
gerilim devir değişimi .................................................................................
65
Şekil 5.16. 3 fazlı asenkron motorun a) 90Hz de gerilim devir değişimi b) 110Hz de
gerilim devir değişimi .................................................................................
65
Şekil 5.17. 3 fazlı asenkron motorun a) 130Hz de gerilim devir değişimi b) 150Hz
de gerilim devir değişimi ............................................................................
66
Şekil 5.18. Basamak sinüs darbe genişlik modülasyonlu invertörle sürülen 3 fazlı
asenkron motorun gerilim ve frekans arasındaki ilişki……………………
66
Şekil 5.19. Faz farklı dengesiz yük gerilimlerinin osiloskop görünümü .......................
67
Şekil 5.20. Asenkron motorun dengesiz faz geriliminde sürülmesi ..............................
68
Şekil 5.21. Üç fazlı asenkron motorun akım-tork değişimi ........................................... 69

xv
SİMGELER VE KISALTMALAR
Bu çalışmada kullanılmış simgeler ve kısaltmalar, açıklamaları ile birlikte aşağıda
sunulmuştur.
Simgeler Açıklamalar
A Amper
Hz Hertz
m² Metrekare
N Newton
S Saniye
V Volt
W Watt
Kısaltmalar
Açıklamalar
b Sinüs basamağının yatay uzunluğu
Di İlk PWM’ in çalışma süresi
Do Ortanca PWM’ in çalışma süresi
de Hata sinyalinin değişimi
e Hata sinyali
Ia İnvertörün a fazının akımı
Ib İnvertörün b fazının akımı
Ic İnvertörün c fazının gerilimi
isα Statorun beta eksenine göre akımı
isβ Statorun alfa eksenine göre akımı
irα Rotorun alfa eksenine göre akımı
irβ Rotorun beta eksenine göre akımı
id Akım vektörünün d ekseni bileşeni
iq Akım vektörünün q ekseni bileşeni
J Yükün ataleti
k Sinüs basamağının dikey uzunluğu
Ki İntegral kazancı

xvi
Kısaltmalar
KD
Açıklamalar
Türev kazancı
Kp Oransal kazanç
La İnvertörün a hattının endüktansı
Lb İnvertörün b hattının endüktansı
Lc İnvertörün c hattının endüktansı
L1 İnvertörün a fazının endüktansı
L2 İnvertörün b fazının endüktansı
L3 İnvertörün c fazının endüktansı
Lr Rotor direnci ve rotor endüktansı
Ls Stator endüktansı
n Bir PWM deki örneklem sayısı
p Çift kutup sayısı
PID Oransal, integral türev kontrol
PWM Darbe genişlik modülasyonu
Ra İnvertörün a hattının omik direnci
Rb İnvertörün b hattının omik direnci
Rc İnvertörün c hattının omik direnci
R1 İnvertörün a fazının omik direnci
R2 İnvertörün b fazının omik direnci
R3 İnvertörün c fazının omik direnci
Rr Rotor direnci
Rs Stator direnci
SSPWM Basamak sinüs darbe genişlik modülasyonu
SPWM Sinüs darbe genişlik modülasyonu
TDoff T/2 periyotta PWM’lerin toplam çalışmama süresi
Te Elektromanyetik tork
TL Şaftın mekaniksel torku
THD Toplam harmonik distorsiyon
Ua İnvertörün a hat gerilimi
Ub İnvertörün b hat gerilimi
Uc İnvertörün c hat gerilimi
xvii
Kısaltmalar
Uao
Açıklamalar
İnvertörün a fazının gerilimi
Ubo İnvertörün b fazının gerilimi
Uco İnvertörün c fazının gerilimi
urα Rotorun alfa eksenine göre gerilimi
urβ Rotorun beta eksenine göre gerilim
usα Statorun alfa eksenine göre gerilimi
usβ Statorun beta eksenine göre gerilimi
Vac Alternatif gerilim
Vdc Doğru gerilim
ωm Rotorun açısal hızı
ωr Rotorun elektriksel açısal hızı
Za a fazının hat empedansı
Zb b fazının hat empedansı
Zc c fazının hat empedansı
XLa a fazının hat reaktansı
XLb b fazının hat reaktansı
XLc c fazının hat reaktansı
ψrα Rotorun alfa eksenine göre akısı
ψrβ Rotorun beta eksenine göre akısı
ψ sα Statorun alfa eksenine göre akısı
ψsβ Statorun beta eksenine göre akısı


1
1. GİRİŞ
Günümüzde ihtiyaçların artmasından dolayı yaşamı kolaylaştıracak daha ileri düzey
sistemler arzu edilmektedir. Bu ihtiyaçları karşılamak amacıyla da endüstri ve tarım
çalışmalarına paralel olarak sanayi ve teknoloji gelişimi sürekli şekilde artmaktadır. Bunun
sonucunda da yaygın bir alanda sanayi ve tarım çalışmaları sürdürülmektedir. Bu durum
enerji ihtiyacı ortaya çıkarmaktadır. Enerji ihtiyaçlarını karşılamak için yeni enerji
kaynakları bulmak ve bunları kullanmak kaçınılmaz ve önemli hale gelmektedir. Lawrence
and Middlekau’a (2005) göre ‘‘ İhtiyaç duyulan enerjiyi elde etmek için güneş enerjisi gibi
yenilenebilir enerji kaynakları dikkat çekmekte’’dir. European Commission’a (2010) göre
‘‘Fosil yakıtların maliyetinin giderek artması ve karbondioksit gibi atıklarla çevre kirliliği
oluşturmasından dolayı güneş enerjisinden elde edilen elektrik enerjisi üretimi 2030 yılında
% 30 a ulaşacak’’tır. Bunun sonucunda da güneş enerjisi ile elde edilecek olan doğru akım
elektrik enerjisi çevre kirliliğin azalmasına katkıda bulunacaktır. Aynı zamanda da
yerleşim merkezlerinden uzak yerlerde hiçbir enerji iletim hattına gerek olmadan üretilip
kullanılmasından dolayı günümüzde ve gelecekte en çok kullanılacak enerji türlerindendir.
Eltawil and Zhao’ a (2010) göre ‘‘Güneş enerjisinden, doğru gerilim üretimi ve dağıtımı
için güneş panelleri kullanımı da dünya üzerinde yaygın bir uygulama alanı bulmakta’’ dır.
Yenilenebilir veya benzeri doğru gerilim kaynaklarından enerji elde edilmesine rağmen
pek çok cihaz ve uygulama için yeterli değildir. Bu enerji türünü alternatif enerjiye
çevirmek gerekebilir. Bu durumda da doğru akımı (DA) alternatif akıma (AA) çevirmek
için invertör devreleri en çok kullanılan güç elektroniği devreleridir [4-10]. Salazar and
Joos’a (1994) göre ‘‘Şimdiye kadar yapılan çalışmaların sonuçlarına göre anahtarlama
fonksiyon içerikli invertör modellerinin kullanılması, hem çalışma şeklinin anlaşılması
hem de sistemin iyileştirilmesi için iyi bir seçenek olmakta’’dır. Bu nedenle de pek çok
bilimsel çalışmada bu invertör içeriğine yer verilmiştir [12-13]. İnvertör devresinin
anahtarlarını kontrol etmede darbe genişlik modülasyon (PWM) üretmek ve kullanmak
karmaşık ancak gerekli olan bir yöntemdir [14-24]. Garcia, Liop ve Novotny’a (1998)
göre ‘‘Temel kontrol amacı, dışarıdan gelebilecek herhangi bir bozulmaya karşı koyarak
motoru istenilen hızda tutmaktır. Gerilim beslemeli bir PWM invertör ile hem gerilim hem
de frekans sabit bir değerde kalması sağlanarak motorun akısı aynı değerde
tutulabilmekte’’dir.

2
Bu çalışma da amaç, yüksek gerilimin tehlike arz ettiği nemli ortamlarda veya enerjinin
olmadığı güneş pillerinin kullanıldığı ortamlarda, düşük gerilimli, yüksek frekansta
invertör tasarımı ve uygulaması yapmaktır. Bu uygulamayı diğer uygulamalardan farklı
olarak basamak darbe genişlik modülasyonu kullanarak yeni matematiksel metotlar
sunmaktır. Ayrıca düşük maliyetli elemanlar kullanarak tasarımda düşük maliyeti
sağlamaktır. Bundan dolayda invertörün donanımsal yapısında mosfetler, transistörler ve
denetleyeci olarak PİC 16F877A ve 18f4550 kullanılmıştır. Kontrol sinyalleri olarak
kullanılan PWM’ler, diğer çalışmalardan farklı olarak 3 faz basamak sinüs sinyal ve farklı
büyüklüklerde iki üçgen sinyalin karşılaştırılmasıyla yapılmıştır. Klasik PWM
yöntemlerinde yük üzerinde oluşan gerilim diferansiyel denklem yöntemleriyle
hesaplanırken, kullanılan basamak sinüs darbe genişlik modülasyon yöntemiyle yükler
üzerinde oluşturulan gerilimin hesaplaması geometrik olarak alan yöntemiyle yapılarak
yük geriliminin bulunması sağlanmaktadır. Basamak sinüs darbe genişlik modülasyonunun
(SSPWM) kontrol ettiği invertöre, yük olarak üç fazlı asenkron motor ve üç fazlı omik,
endüktif yükler bağlanarak benzetim ve uygulama çalışmaları yapılmıştır. Üç fazlı
asenkron motorların kullanılması nedeni, sanayi sektöründe kullanılan diğer motorlarla
kıyaslandığında, maliyetlerinin düşük olması, bakımlarının ve tamirinin kolay yapılması ve
daha dayanıklı ve uzun ömürlü olmalarıdır [25-26]. Bununla birlikte endüstriyel
uygulamalarda çoğu zaman değişken hızlarda motorların çalıştırılması gerekmektedir. AA
motorlarına uygulanan gerilimin alternatif olması ve stator sargılarına uygulanan gerilimin
indüksiyon yoluyla rotoru etkileyerek dönmeyi sağlaması gibi nedenlerden dolayı
uygulanan gerilimin frekansına ve efektif değerine müdahale etmek gerekmektedir. AA
motorlarının hızlarının kontrolü DA motorlarla kıyaslandığında biraz daha karmaşık
olmasına rağmen 3 fazlı AA motorların hız ve gerilim kontrolü üzerine yapılmış çok
sayıda çalışma bulunmaktadır [27-35]. Önerilen invertör sistemiyle yapılan benzetim ve
deneysel çalışmalarda dengeli ve dengesiz omik (R) endüktif (L) yük deneyleri yapılarak
akım ve gerilim değerleri ölçülerek harmonik analizi yapılmıştır. Ölçüm sonuçları, klasik
PWM yöntemleriyle yapılan benzetim ve deneysel çalışma sonuçlarıyla karşılaştırılmıştır.
Alınan sonuçlara göre, basamak sinüs darbe genişlik modülasyon yöntemiyle sürülen
yüklerin kare PWM ve sinüs darbe genişlik modülasyon(SPWM) yöntemine göre akım
harmonik dağılımı ve sinüs şeklinin oluşturulması bakımından tatmin edici olduğu ortaya
konmuştur. RL yükler için yapılan çalışmalara göre, farklı bir modülasyon tekniği ile yeni
bir matematiksel model kullanılarak, 0-500Hz gibi geniş frekans aralığında frekansın
ayarlanabilinmesi ile yüksek frekans değişim olanağı sağlamaktadır. 380 Volt, 1Amper,

3
1400 d/d ve 50 Hz lik üç fazlı asenkron motor için yapılan benzetim ve deneysel
çalışmalarda, dengeli ve dengesiz faz gerilimleriyle sürülen motorun ölçümleri yapılmıştır.
Bu ölçümlerde Faz, hat gerilimleri ve faz, hat akımları ölçülmüştür. 0-100Volt aralığında,
motor hızı takometre ile ölçülürken, yük bağlanarak akım-tork ilişkisi araştırılmıştır. Motor
yüklendikçe akım artarken, torkun da arttığı gözlenmiştir. Motor nominal geriliminin
altında gerilimle sürüldüğü için düşük frekanslarda, nominal yük değerinin altında
değerlerle yüklenebilmiştir. Motor boşta dengeli ve dengesiz faz gerilimi altında, 0-
100Volt gibi düşük bir gerilim aralığında bile motor çok yüksek devirlere ulaşmıştır.
İnvertör devresinde güç anahtarları olarak mosfetlerin kullanılması sürücü devresi
oluşturmayı güçleştirmesine rağmen sistemin uygulamasında tatmin edici sonuçlar
alınmıştır. Sistemde mosfetlerin ısınmasını önlemek için PC 817 optokupler kullanılarak
sürücü devresi oluşturulmuştur. Diğer üç fazlı invertör devrelerinden farklı olarak düşük
maliyetli Mikrochip teknolojisinin PIC 16F877A, 18F4550 sürümü kullanılmıştır.
Mikrochip ler donanımsal olarak, iki bacağı PWM ürettiği için üç fazlı invertör devre
uygulamasına yeterli olmamasına rağmen yapılan yazılımla PIC’in 6 adet PWM üretmesi
sağlanmıştır. Böylece daha pahalı işlemcilerle yapılacak invertör uygulaması,
mikrodenetleyici ler kullanılarak daha düşük maliyetle başarıyla yapılmıştır.

4

5
2. İNVERTÖR TASARIMI İÇİN YAPILAN ÇALIŞMALAR
2.1. PWM
2.1.1. Klasik SPWM yöntemi
Darbe genişlik modülasyonu ( PWM ) ya da darbe süresi modülasyonu ( PDM ), darbe
genişliği, modülatör sinyal bilgilerine dayanarak darbe süresi oluşturan, uygun bir
modülasyon tekniğidir. Bu modülasyon tekniği bilgileri kodlamak için kullanılabilir.
Ancak ana kullanım amacı özellikle motorlar gibi atalet yüklerinin, elektrikli cihazlar için
verilen gücün kontrolünü sağlamaktır.
Besleme geriliminin ortalama değeri, anahtarın açık veya kapalı olma durumuna göre
değişecektir. İstenilen değerde gücün yük üzerinde oluşması için, anahtarları kontrol eden
darbelerin iletimde kalması sağlanacaktır. Genel olarak PWM oluşturma yöntemlerinden
biri, sinüs ve üçgen sinyallerinin karşılaştırılmasıdır. Aşağıda Şekil 2.1’de üçgen ve sinüs
sinyallerinin karşılaştırılması verilmiştir.
Şekil 2.1. Üçgen ve sinüs sinyallerinin karşılaştırması
Toplam (çalışma + çalışmama) süre (T) % 100 olarak belirlenir ve çalışma oranı (D), bu
toplam süre yüzdeliği üzerinden değer alır. D, %100 yaklaştıkça besleme geriliminin yük
üzerinde değeri artar. PWM yöntemi, diğer gerilim kontrol ve ayar yöntemlerinden farklı
olarak, hızlı bir şekilde gerilim kontrolü sağlar. Bu yöntemde, gerilimin ve frekansın hızlı
-2
-1
0
1
2
Vol
t
0
0.5
1
Vol
t
0.475 0.48 0.485 0.49 0.495 0.50
0.5
1
t(s)
Vol
t

6
bir şekilde kontrolü yapılırken, minimum kayıp oluşur. Bu nedenle, verimli ve hızlı bir
kontrol işlemi gerçekleştirilir. Bunun yanında, PWM yöntemini kullanan dönüştürücüler,
ayarlı transformatörlere nazaran daha hafif ve daha az yer kaplaması gibi avantajlara da
sahiptir.
PWM yönteminin bilinen en önemli dezavantajı, şebeke üzerinde harmoniklere neden
olmasıdır. Bu harmonikler, şebeke geriliminde yüksek frekanslı dalgalanmalar oluşmasına
neden olur. Buna bağlı olarak da şebekeye bağlı yükler üzerinde oluşan akım ve
gerilimlerde yüksek frekanslı gürültü oluşur [24].
2.1.2. İki farklı büyüklükte üçgen ile üretilen SPWM yöntemi
Yapılan bu tez çalışmasından önce SPWM ve benzeri PWM çalışmaları bazı güç
elektroniği devreleri için yapılmıştır [38-42]. Yapılan benzetim çalışmalarında, farklı
yöntemlerle PWM’ler üretilmiştir. Bu kesimde, 60 derece faz farklı, üç fazlı alternatif
gerilim üretebilmek için Şekil 2.1’deki sinyalleri veren yöntemden farklı bir yöntem
kullanılmıştır. Daha önce denenen PWM yönteminden farklı olarak, 60 derece faz farklı 3
sinüs sinyal ile farklı büyüklükteki iki üçgen sinyalin karşılaştırılması aşağıda Şekil 2.2’de
verildiği gibidir. Bu karşılaştırma sonucunda ortaya çıkan PWM’ler Şekil 2.3’de
verilmiştir.
Şekil 2.2. 3 adet sinüs sinyalle farklı büyüklükte 2 üçgen sinyalin karşılaştırılması
0.475 0.48 0.485 0.49 0.495 0.5-1.5
-1
-0.5
0
0.5
1
1.5
t(s)
Vol
t

7
Şekil 2.3. 3 adet sinüs sinyalle farklı büyüklükte 2 üçgen sinyalin karşılaştırılması sonucu
oluşan altı PWM
Şekil 2.1 deki sinyallere göre; Şekil 2.2’deki sinüs sinyaller, sıfır noktasından artı ve eksi
yönde iki üçgen grubuyla karşılaştırılmıştır. Bunun sonucunda, Şekil 2.2’deki sinyalleri
veren yöntemin, gerilim üretmeyen periyot dışında kısa süreli anahtar çalışmalarını
engelleyip gerilim sarkmalarını azaltarak daha düzgün sinyaller üretmesine imkan
sağladığı gözlenmiştir. Farklı büyüklükte iki PWM in aynı anda küçük çalışma oranlısı
kaynağın pozitif tarafında olan anahtara, büyük çalışma oranlısı ise kaynağın negatif
tarafında olan anahtara uygulanmaktadır. Bundan dolayı da endüktif yüklerde endüktif
etkiyi azaltmak için şase tarafındaki anahtarların daha fazla çalışması sağlanmış olur. Şase
tarafındaki anahtarların fazla çalışması, anahtarlamadaki geçişleri rahatlatarak yükün
üzerinde daha düzgün sinüs üretilmesine ve yükün daha kolay sürülmesine katkıda
bulunur.
2.1.3. Basamak sinüs darbe genişlik modülasyon yöntemi
DA enerjiyi AA enerjiye dönüştüren invertör devreleri için PWM kullanımı pek çok
çalışmada yapılmıştır [36-46]. Burada diğer invertör uygulamalarından farklı olarak,
anahtarların kontrolünü sağlayacak PWM’leri üretmek için, 3 fazlı basamak sinüs sinyali
ile 2 adet farklı büyüklükteki üçgen sinyalin karşılaştırılması yapılmıştır. Bu karşılaştırma
sonucunda anahtarların çalıştırılması için PWM’ler üretilmiştir. Bu PWM’lerin darbe
genişlikleri doğrusal artışla oluşturulduğundan, kontrol ettiği yük üzerinde düşük seviyede
0
0.5
1
(a)
vo
lt
0
0.5
1
vo
lt
(b)
0
0.5
1
vo
lt
(c)
0
0.5
1
vo
lt
(d)
0
0.5
1
vo
lt
(e)
0.475 0.48 0.485 0.49 0.495 0.50
0.5
1
vo
lt
(f) t(s)

8
harmoniklere sebep olmaktadır. Bu PWM yöntemiyle, kaynağın negatif tarafındaki
anahtarların daha uzun süre çalışır durumda kalması sağlanarak endüktif yüklerdeki
çalışmalarda daha düzgün sinyal üretilmesi sağlanmıştır. Sinyallerin karşılaştırılması Şekil
2.4’de verilmiştir.
Şekil 2.4. Basamak sinüs sinyalleri ile üçgen sinyalin karşılaştırılması
Şekil.2.4’deki karşılaştırmalar sonucu altı mosfet için üretilen 60 derece faz farklı SSPWM
ler Şekil 2.5’de görülmektedir. Kaynağın eksi ucuna bağlı olan mosfetleri kontrol eden
SSPWM’lerin daha büyük çalışma oranlı olduğu görülmektedir.
Şekil 2.5. a) S1 için PWM b) S2 için PWM c) S3 için PWM d) S4 için PWM e) S5 için
PWM f) S6 için PWM
0.475 0.48 0.485 0.49 0.495 0.5
-1.5
-1
-0.5
0
0.5
1
1.5
t(s)
Vol
t
0
0.5
1
(a)
Vol
t
0
0.5
1
(b)
Vol
t
0
0.5
1
(c)
Vol
t
0
0.5
1
(d)
Vol
t
0
0.5
1
(e)
Vol
t
0.475 0.48 0.485 0.49 0.495 0.50
0.5
1
(f) t(s)
Vol
t

9
(a) (b)
Şekil 2.6. a) Basamak sinüs ile üçgen sinyalin karşılaştırılması b) Üçgen benzerliğine göre
PWM’ler
PWM’ler oluşturulurken üç tane basamak sinüs sinyali ile iki farklı büyüklükte üçgen
sinyalin karşılaştırılmasına karşılık gelen PWM’ler üretilmiştir. Basamak sinüs
sinyallerinin kullanılması, oluşturulan PWM’lerin doğrusal olarak artmasına sebep olur.
Bu durum matematiksel modelin çıkartılmasını basitleştirirken modelin de diğer
uygulamalardan farklı olmasını sağlamaktadır. Şekil 2.6 ve Şekil 2.7’de; Di, ilk PWM’in
çalışma süresi; Do, ortadaki PWM’in çalışma süresi; k, basamağın dikey uzunluğu, b,
basamağın yatay uzunluğu; a, üçgenin basamağı kesme miktarı; n, bir alternanstaki
örneklem sayısıdır. PWM’ler doğrusal olarak değiştiğinden T/2 alternanstaki toplam
PWM sayısı ile gerilim arasındaki ilişki
dcoi
T
dcoi
)nVT
DD(
)nV2
DD(
2
(2.1)
eşitliği ile verilir.
Şekil 2.6 ya göre, anahtarların çalışmadığı süre hesaplanırsa. İlk PWM için çalışmama
süresi b-a olarak ifade edilir. T/2 periyot için PWM’lerin toplam çalışmama süresi ise TDoff
a+b)-1)a2
n)a] +b-((
2
n2[b-(b-a +b-2aTDoff
(2.2)

10
dır. Eş. 2.2 düzenlenecek olursa,
2)na]/2
n[2bn-(1TDoff
(2.3)
elde edilir.
PWM lerin tek sayıda artma ve azalma gösterdiği durum için, basamak sinüs ve üçgen
sinyallerin karşılaştırılması Şekil 2.7’de, bu karşılaştırmalar sonucu oluşan PWM’lerin
üçgen benzerliğiyle gösterimi Şekil 2.8’de verilmiştir.
Şekil 2.7. Tek sayıda artma ve azalma gösteren PWM’ler için basamak sinüs ve üçgen
sinyallerin karşılaştırılması

11
Şekil 2.8. Tek sayıda artış gösteren PWM’ler için üçgen benzerliği
PWM’lerin doluluk oranlarına göre T/2 periyot’daki alternatif gerilimi oluşturacak toplam
PWM sayısı yine Eş. 2.1’deki gibi bulunur. Eğer PWM’lerin çalışma süresi dışında kalan
alan dikkate alınıp hesaplama yapılırsa,
2]1)-(-…+3+[ anba-b a-bTDoff
(2.4)
]2
2[]
2
)1()(
2()
2[(2
anbn
ananb
nTDoff
(2.5)
elde edilir.
2.2. Üç Fazlı İnvertör
2.2.1. RL yüklü üç fazlı invertör
3 fazlı invertör devresi 6 adet mosfete sahiptir ve bu mosfetler gruplar halinde
anahtarlanması gerekmektedir. 360 derecelik bir sinüs dalga oluşturmak için altı adet
mosfet, üçerli guruplar halinde 6 defa peş peşe anahtarlamalar yapılarak 60 derecelik
açılarla çalıştırılmıştır. İlk olarak invertörün çalışması RL gibi bir yükte denenerek
gözlenmiştir. Dengeli RL yükleri yıldız bağlandıktan sonra invertöre giriş gerilimi olarak
da Vdc gerilimi uygulanmıştır. İnvertörün uzay durum denklemleri RL yüklerinin yıldız
bağlı durumuna göre çıkarıldı ve yapılan benzetim çalışlarında bu yüklerdeki 3 fazlı hat ve

12
faz gerilim değerleri ölçüldü. Anahtarlar 360 derecelik çalışmanın sonunda invertöre
bağlanan yükün fazlar arası geriliminin tepe değeri 2V/3 olmuştur. Aşağıda Şekil 2.9’da 3
fazlı invertör modeli verilmiştir.
Şekil 2.9. RL yüklü 3 fazlı invertör
Bu çalışmadaki invertör uygulamalarından, anahtarların kontrolü için kullanılan 3 fazlı
basamak sinüs sinyali ile 2 adet büyüklükleri farklı üçgen sinyalin karşılaştırılması yapılan
PWM’ler ile klasik PWM yöntemlerinin yük üzerindeki performanslarının karşılaştırılması
yapılmıştır.
2.2.2. RL yüklü üç fazlı invertörün matematiksel modeli
Alternatif gerilimi oluşturan ve anahtarlama sinyallerine karşılık gelen PWM toplamları
acViRLdt
didc
nVT
oDiD
)(
(2.6)
şeklindedir.
a Hat gerilimi Za empedansı üzerinde oluşur. Za=Ra+ jXLa dir. Birinci hat gerilim için
durum, denklemleri çıkarılacak olursa 0-60 derece anahtarlama süresince S1, S3, S6=ON
ve S2, S4, S5= OFF ve 60-120 derece anahtarlama süresince S2, S3, S6=ON ve S1, S4,

13
S5= OFF ve Va gerilim denklemlerinden diferansiyel akım eşitliğini veren denklem Eş.
2.7’ deki gibidir.
dt
adi
aL
aRai
dcnV
aTL
oDiD
)(
(2.7)
b Hat gerilimi Zb empedansı üzerinde oluşur. Zb=Rb+ jXLb dir. İkici hat gerilimi için durum
denklemleri, 60-120 derece anahtarlama süresince S2, S3, S6=ON ve S1, S4, S5= OFF.
120-180 derece anahtarlama süresince S2, S3, S5=ON ve S1, S4, S6= OFF ve Vb gerilim
denklemlerinden diferansiyel akım eşitliğini veren denklem
dt
bdi
bL
bR
bi
dcnV
aTL
oDiD
)( (2.8)
şeklindedir.
c Hat gerilimi Zc empedansı üzerinde oluşur. Zc=Rc+ jXLc dir. Üçüncü faz için durum
denklemleri, 120-180 derece anahtarlama süresince S1, S4, S5=ON ve S2, S3, S6= OFF ve
180-240 derece anahtarlama süresince S1, S4, S6=ON ve S2, S3, S5= OFF. Vc gerilim
denklemlerinden diferansiyel akım eşitliğini veren denklem
dt
cdi
cL
cRci
dcnV
aTL
oDiD
)( (2.9)
şeklindedir.
Elde edilen durum denklemlerinin matris formu
dcnV
cTL
oDiD
dcnV
bTL
oDiD
dcnV
aTL
oDiD
cIb
I
aI
cL
cRb
L
bR
aL
aR
dt
cdidt
bdidt
adi
)(00
0)(0
00)(
00
00
00
(2.10)

14
şeklinde ifade edilir.
Mosfetlerin çalışmama durumu dikkate alınarak çıkış gerilim değeri bulunacak olursa, Eş.
2.3 ün kullanılması ile T /2 periyot için üretilen alternatif gerilimi; b, a ve T/2’nin birimleri
saniye olmak üzere,
dcV
T
)na]2
n(1-[2bn
dcV
dcV
2
T
)na]/22
n(1-[2bn
dcVacV
(2.11)
olarak hesaplanır.
Örnek olarak 10V DC gerilim, T/2 =100 mikrosaniye için alternatif gerilime
dönüştürülmüş olsun. Basamak süresi b= 10 mikrosaniye ve ilk darbe çalışma süresi a ise 1
mikrosaniye olsun. Eş.2.11 dikkate alınarak toplam oluşturulan AA gerilim,
1010
100
2
b
Tn
(2.12)
6
66
10200
10]10110)2
101()1010102[(
10
acV
(2.13)
VacV 371020
14010
200
10]60200[10
(2.14)
olarak bulunur.
Alternatif hat gerilimi denklemi olan Eş. 2.9, genel gerilimin diferansiyel denklemine
eşitlenerek
acViRLdt
di
dcV
T
nan
bn
dcV
])2
(1-2[
(2.15)

15
dt
di
L
iR
dcV
TL
nan
bn
L
dcV
])2
(1-2[
(2.16)
yeni bir denklem elde edilir.
Birinci faz için durum denklemleri çıkarılacak olursa, 0-60 derece anahtarlama süresince
S1, S3, S6=ON ve S2, S4, S5= OFF. 60-120 derece anahtarlama süresince S2, S3, S6=ON
ve S1, S4, S5= OFF ve Va gerilim denklemlerinden diferansiyel akım eşitliğini veren
denklem
aL
aRai
dcV
aTL
nan
bn
aL
dcV
dt
adi
])2
(1-2[
(2.17)
şeklinde olur.
İkici faz için hat geriliminin durum denklemleri, 60-120 derece anahtarlama süresince S2,
S3, S6=ON ve S1, S4, S5= OFF. 120-180 derece anahtarlama süresince S2, S3, S5=ON ve
S1, S4, S6= OFF ve Vb gerilim denklemlerinden diferansiyel akım eşitliğini veren denklem
bL
bR
bi
dcV
bTL
nan
bn
bL
dcV
dt
bdi
])2
(1-2[ (2.18)
şeklinde olur.
Üçüncü fazın hat gerilimi için durum denklemleri, 120-180 derece anahtarlama süresince
S1, S4, S5=ON ve S2, S3, S6= OFF. 180-240 derece anahtarlama süresince S1, S4,
S6=ON ve S2, S3, S5= OFF ve Vc gerilim denklemlerinden diferansiyel akım eşitliğini
veren denklem
cL
cRciVdccTL
nan
bn
cL
dcV
dt
cdi
])2
(1-2[
(2.19)

16
olarak elde edilir.
Denklemler matris formda
dcV
cTL
nan
bn
dcV
bTL
nan
bn
dcV
aTL
nan
bn
cL
bL
aL
dcV
cR
cI
dcV
bR
bI
dcV
aR
aI
dt
cdidt
bdidt
adi
])2
(1-2[
00
0
])2
(1-2[
0
00
])2
(1-2[
1
1
1
)(00
0)(0
00)(
(2.20)
şeklinde ifade edilir.
PWM lerin doluluk oranının tek sayıda artışına göre, PWM lerin çalışmama durumu
dikkate alınarak elde edilen toplam anahtarlama gerilimi ve T/2 periyot için toplam gerilim
eşitliği
dcV
T
anbn
dcV
dcV
anbn
dcVacV ]
2[
2
T
]2
2[
(2.21)
şeklindedir.
Faz akımının diferansiyel eşitliğini bulmak için
acViRLdt
di
dcV
T
anbn
dcV
]
2[
(2.22)

17
L
iR
dcV
TL
anbn
L
dcV
dt
di
]
2[
(2.23)
eşitlikleri kullanılır.
0-60 ve 60 -120 derecelik anahtarlama açıları için a fazının diferansiyel akım denklemi
aL
aRai
dcV
aTL
anbn
aL
dcV
dt
adi
]
2[
(2.24)
olarak bulunur.
60-120 ve 120 -180 derecelik anahtarlama açıları için b fazının diferansiyel akım denklemi
bL
bR
bi
dcV
bTL
anbn
bL
dcV
dt
bdi
]2
[ (2.25)
olarak bulunur.
120-180 ve 180 -240 derecelik anahtarlama açıları için c fazının diferansiyel akım eşitliği
cL
cRci
dcV
cTL
anbn
cL
dcV
dt
cdi
]
2[ (2.26)
olarak bulunur.
Eşitliklerin matris formu ise

18
dcV
dcV
dcV
TL
anbn
TL
anbn
TL
anbn
dt
cdidt
bdidt
adi
c
b
a
cL
bL
aL
dcV
cR
cI
dcV
bR
bI
dcV
aR
aI
.
]2
[00
0]2
[0
00]2
[
1
1
1
)(00
0)(0
00)(
(2.27)
ifade edilebilir.
2.3. Üç Fazlı Asenkron Motor
Asenkron makineler, değişken performanslı, farklı amaçlar için kullanılan dayanıklı
elektrik makineleridir. Uygulama için 3 veya tek faz girişli AA ya ihtiyaç duymasından
dolayı asenkron motor kontrolü için yapılmış çalışmalar vardır [30-36]. ‘‘Yarı iletken
teknolojisinin gelişimiyle mikroçip ve mikrokontrolör endüstrisinin gelişimi asenkron
makineler ve benzeri makinelerin DA enerjinin AA ya çevrilerek sürülme ve kontrol
konuları ilgi çekici olmaktadır’’ [36].
Asenkron makineler, çalışma esnasında başta frekansa bağlı olarak ve çalışma şartlarına
göre parametreleri zamanla değişen bir yapıya sahiptir. Bu nedenle farklı büyüklükte iki
üçgen ile basamak sinüs sinyallerinin karşılaştırılmasıyla üretilen SSPWM’lerin asenkron
motoru kontrol etmesi, invertör uygulamaları için önerilen bir çalışmadır.
2.4. Asenkron Motorun Alfa Beta Eksenlerine Göre Matematiksel Modeli
Bölüm 2.2.1’de yıldız bağlı ve dengeli RL yükün matematiksel modeli çıkarılmıştı. Bu
defa, Matlab Simulink’in kullandığı asenkron motorun matematiksel modelleri
çıkarılmıştır. Bu matematiksel modeller alfa beta eksenlerini temsil eden 2 adet eşdeğer
devre dikkate alınarak oluşturulmuştur. Şekil 2.10’da alfa eksenini temsil eden eşdeğer
devre verilmiştir, Şekil 2.11’de ise beta eksenini temsil eden eşdeğer devre verilmiştir.

19
Bu şekiller yeniden çizilecekti
Şekil 2.10. Asenkron motorun alfa eksenini temsil eden eşdeğer devre
Şekil 2.11. Asenkron motorun beta eksenini temsil eden eşdeğer devre
Alfa ve beta eksenlerine göre stator ve rotor akılarının denklemleri
rmsss iLiL (2.28)
rmSSS iLiL (2.29)
smrrr iLiL (2.30)
smrrr iLiL (2.31)
şeklinde bulunur.

20
Alfa ve beta eksenlerine göre stator ve rotor gerilimlerinin denklemleri,
ssssdt
diRu (2.32)
ssssdt
diRu (2.33)
rrrrr wdt
diRu (2.34)
rrrrr wdt
diRu (2.35)
olarak elde edilir.
Stator akımının alfa eksenindeki eşitliği ise
r
sm
r
rmSSSSS
L
iL
dt
d
L
L
dt
diL
dt
diRu
2
(2.36)
r
rm
r
m
sssssL
L
dt
d
L
LLi
dt
diRu
)(
2
(2.37)
r
rm
s
rs
mrs
ssssL
L
dt
dL
LL
LLLi
dt
diRu
)(
2
(2.38)
S
s
Ss
r
m
rs idt
d
LiR
L
L
dt
du
1][ (2.39)
şeklindedir.
Stator akımının beta eksenindeki eşitliği ise

21
r
smr
msssssL
iLL
dt
diL
dt
diRu
(2.40)
r
sm
r
rm
sssssL
iL
dt
d
L
L
dt
diL
dt
diRu
2
(2.41)
r
rm
s
rs
mrs
ssssL
L
dt
dL
LL
LLLi
dt
diRu
)(
2
(2.42)
s
s
ss
r
m
rs idt
d
LiR
L
L
dt
du
1][ (2.43)
rs
mrs
LL
LLL 2 (2.44)
şeklindedir.
Moment denklemleri ise
)(2
3 rsrsMe iiiiLp
T (2.45)
mLem BwTT
dt
dwJ (2.46)
mr wwp
2
(2.47)
olarak ifade edilir.

22
2.5. Asenkron Motorun Eksen Dönüşümü
2.5.1 Clarke dönüşümü
(a, b, c) gibi üç eksenli koordinat sistemini (α,β) gibi iki eksenli sisteme dönüştürmeye
Clarke dönüşümü denilmektedir.
Iα ve Iß dik açılı referans düzlem parametreleridir, dengeli üç faz sistemlerde Io=0 eşit olur
ve sistem bileşenidir. Birçok uygulamada bileşen yok kabul edilir veya önemsizdir. Bu
durumda uzay vektörü I = Iα + Iß şeklinde ifade edilir.
Bu durumda da iα = ia ve ia + ib + ic = 0 olur. Buna göre dönüşüm matrisi
c
b
a
0
β
α
i
i
i
330
3
1
3
1
3
2
i
i
i
000
11
(2.48)
gibi olur.
0 cba iii
(2.49)
Üç faz akımının anlık değerlerinin toplamı sıfır olduğundan üç faz akımından herhangi iki
tanesi bilindiğinde, diğer bilinmeyen değer bulunabilir. Bu nedenle Clarke dönüşümü
hesaplamasında iki tane faz akımı kullanılacaktır.
cba iiii3
1
3
1
3
2
(2.50)
3
cb iii
(2.51)
Stator vektör uzayı ve α-β düzlemindeki bileşenleri Şekil 2.12’ de verildiği gibidir [37].

23
Şekil 2.12. Stator vektör uzayı ve α-β eksenindeki bileşenleri
2.5.2. Park dönüşümü
Bu dönüşüm ile zaman ve hızdan bağımsız iki eksenli, akı ve momenti temsil eden
koordinat sistemine geçilir. Clarke dönüşümüyle iki boyutlu α-β düzlemine geçildikten
sonra çıkışlar vektör çevirme bloğuna verilir. Burada rotor akısının bağlı olduğu d-q
düzlemini takip etmek için vektör Ѳ açısı kadar döner. Ѳ açısı kadar vektörün
döndürülmesi
i
i
cossin
sincos
i
i
q
d
(2.52)
göre yapılır. Eş.2.52 açılacak olursa
sinicosiid (2.53)
cosisiniid (2.54)

24
eşitlikleri elde edilir.
Stator uzay vektörü α-β eksenindeki bileşeni ve dönen referans alandaki d-q bileşenleri
Şekil 2.13’ de verildiği gibidir [37].
Şekil 2.13. Stator uzay vektörü α-β eksenindeki bileşeni ve dönen referans alandaki d-q
Bileşenleri
2.5.3. Ters Park dönüşümü
Bu dönüşüm statora uygulanacak üç fazlı gerilimin iki eksenli koordinat sistemindeki
izdüşümünü verir. Ters Park dönüşümü ile gerilim vektörünün α-β düzlemindeki değeri
hesaplanır.
Ters Park dönüşümü
q
d
u
u
cossin
sincos
u
u
(2.55)
gibi ifade edilir.
Eş.2.55 açılacak olursa
sinucosuu qd (2.56)

25
cosusinuu qd (2.57)
eşitlikleri elde edilir [37].
2.5.4. Ters Clarke dönüşümü
Bu dönüşümde iki boyutlu α-β ekseninden üç boyutlu sisteme dönüşüm yapılır. Sistemin
matrisi
u
u
2
3
2
12
1
01
u
u
u
c
b
a
2
3
(2.58)
gibi dir.
Eş.2.58 açılacak olursa
uua (2.60)
uuub2
3
2
1
(2.61)
uuuc2
3
2
1
(2.62)
eşitlikleri elde edilir [37].

26

27
3. İNVERTÖR DEVRESİ İÇİN YAPILAN BENZETİM
ÇALIŞMALARI
3.1. Rezistif Endüktif ve 3 Fazlı Asenkron Motorun İnvertör ile Benzetimi
Kesim 2.4 de matematiksel modeli çıkarılan devrenin 6 mosfetle yapılan benzetim devresi
Şekil 3.1’de verilmiştir.
Şekil 3.1. Matlab Simulink’te 3 fazlı asenkron motorun benzetimi
Sistemi kontrol için kullanılan basamak sinüs darbe genişlik modülasyon yöntemi ile
sürülen yüklerin akım harmonik analizi yapılmıştır. 70 volt DA giriş gerilimiyle 12 Ω luk
omik yük için yapılan benzetim çalışmasında elde edilen fazlar arası ve hatlar arası
gerilimler Şekil 3.2’de, SSPWM ile sürülen üç fazlı omik yükün hatlar arası gerilimi Şekil
3.3’de ve fazlar arası akım ise Şekil 3.4’de verilmiştir. Anahtarlama frekansını oluşturan
süre 5 mikro saniyedir.

28
Şekil 3.2. Omik yüklü invertörün Matlab Simulink’deki hatlar arası gerilimleri
Şekil 3.3. Omik yüklü invertörün Matlab Simulink’deki fazlar arası gerilimleri
-50
0
50
UaV
OL
T
-50
0
50
Ub
VO
LT
0.044 0.045 0.046 0.047 0.048 0.049 0.05
-50
0
50
t(s)
Uc
VO
LT
-50
0
50
GE
RİL
İM (
V)
Uao
-50
0
50
Ubo
GE
RİL
İM (
V)
0.044 0.045 0.046 0.047 0.048 0.049 0.05
-50
0
50
t(s)
Uco
GE
RİL
İM (
V)

29
Şekil 3.4. Omik yüklü invertörün Matlab Simulink’deki faz akımları
Matlab Simulink’te, basamak sinüs darbe genişlik modülasyonlu invertörün omik yükle
uygulaması yapıldıktan sonra, omik ve endüktif yük benzetimi yapılmıştır. Harmonik
analizi de omik ve endüktif yüklerde yapılarak sistemin istenmeyen unsurlarının oranı
belirlenmiş oldu. Şekil 3.5.a’da RL yükün hatları arası gerilimi, Şekil 3.5.b’de ise, RL
yükün faz gerilimleri verilmiştir.
(a) (b)
Şekil 3.5. RL yüklerin a) hatlar arası gerilimleri b) faz gerilimleri
-50
0
50
GE
RİL
İM
(V)
Ua
-50
0
50
Ub
GE
RİL
İM
(V)
0.044 0.045 0.046 0.047 0.048 0.049 0.05
-50
0
50
t(s)
Uc
GE
RİL
İM
(V)
-50
0
50
GE
RİL
İM
(V)
Uao
-50
0
50
Ubo
GE
RİL
İM
(V)
0.044 0.045 0.046 0.047 0.048 0.049 0.05
-50
0
50
t(s)
Uco
GE
RİL
İM
(V)

30
3.2. Üç Fazlı İnvertörle Sürülen RL Yükün Toplam Harmonik Dağılımı
SSPWM’ in kontrol ettiği invertörün yük üzerinde oluşturduğu akımın şekli ve harmonik
dağılımı Şekil 3.6’da verilmiştir. Benzetim devresinde üç fazın her bir omik yükü için 1 Ω,
üç fazın her bir endüktif yükü için 100 mili Henry kullanılmıştır. Giriş gerilimi 70 Volt,
Modülasyon indeksi 0.9 değerleri kullanılmıştır. Anahtarlama süresi 5 mikro saniyedir.
(a) (b)
Şekil 3.6. a) Üç fazlı invertörün faz akımları b) RL yük akımının harmonik dağılımı
Yapılan benzetim çalışmasının sonucunda, yük akımının harmonik değerinin yüzde birin
altında bir değer aldığı görülmektedir.
3.3. Üç Fazlı İnvertörle Asenkron Motorun Sürülmesinin Benzetimi
Daha önce Bölüm 2’de matematiksel modeli verilen asenkron motor için, bu bölümde
Matlab Simulink kullanılarak basamak sinüs darbe genişlik modülasyonlu benzetim
çalışmaları yapılmıştır. Şekil 3.7.a’da 3 fazlı stator akımları, Şekil 3.7.b’de ise rotor akımı
birlikte verilmiştir. Asenkron motor 110 Volt 1Amper ve 50 Hz, 1400 d/d olarak
modellenmiştir.
0.044 0.045 0.046 0.047 0.048 0.049 0.05
-0.1
-0.05
0
0.05
0.1
t(s)
AK
IM (
A)
Ia Ib Ic
0.044 0.045 0.046 0.047 0.048 0.049
-0.1
-0.05
0
0.05
0.1
Ia
T (s)
Mag
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.05
0.1
F (Hz)
Fundamental (500Hz) = 0.1253 , THD= 0.52%
Mag
(%
of
Fu
nd
am
en
tal)

31
(a) (b)
Şekil 3.7. a) ASM’nin üç faz stator akımları b) ASM’nin rotor akımı
Şekil 3.8 de ASM’nin 60 derece faz farklı üç faz hatlar arası gerilimleri ve ASM’nin faz
gerilimi verilmiştir.
(a) (b)
Şekil 3.8. ASM’nin a) 60 derece faz farklı üç faz hatlar arası gerilimleri b) faz gerilimi
Şekil 3.9. da 3 fazlı ASM’nin rotor devri ve ASM’nin elektro manyetik torku verilmiştir.
Burada rotor devrinin ve manyetik torkun yaklaşık 2,5 saniyede kararlı hale geldiği
gözlenmektedir. TL=0 yük için yerleşme zamanı 2.5 saniye, TL=1/2 yük için yerleşme
zamanı 3 saniye, TL=1 yük için yerleşme zamanı 3.5 saniyedir.
0 0.5 1 1.5 2 2.5 3-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
t(s)
AK
IM
(
A)
Ia
Ib
Ic
0 0.5 1 1.5 2 2.5 3-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
t(s)
AK
IM
(A
)
-50
0
50
GE
RİL
İM (
V)
Ua
-50
0
50
Ub
GE
RİL
İM (
V)
2.5 2.55 2.6 2.65 2.7 2.75 2.8 2.85 2.9 2.95 3
-50
0
50
t(s)
Uc
GE
RİL
İM (
V)
2.5 2.55 2.6 2.65 2.7 2.75 2.8 2.85 2.9 2.95 3-60
-40
-20
0
20
40
60
t(s)
GE
RİL
İM
(V)

32
(a) (b)
Şekil 3.9. 3 fazlı ASM’nin a) rotor devri b) elektro manyetik torku
3.4. Üç Fazlı İnvertörle Sürülen Asenkron Motorun Toplam Harmonik Distorsiyonu
Yapılan çalışmanın stator akımının harmonik dağılımı Şekil 3.10’da verilmiştir.
Şekil 3.10. 3 fazlı ASM’nin stator akımı ve harmonik dağılımı
Benzetim çalışmalarının sonuçlarına göre, toplam harmonik dağılımın geleneksel kontrol
yöntemleri kullanılmadan % 0.82 değerinde kaldığı görülmektedir.
0 0.5 1 1.5 2 2.5 3-200
0
200
400
600
800
1000
1200
1400
t(s)
DE
VİR
(R
PM
) 0
1
2
EL
EK
TR
OM
AN
YE
TİK
TO
RK
(N
m)
0 0.5 1 1.5 2 2.5 3
0
1
2
t(s)
EL
EK
TR
OM
AN
YE
TİK
TO
RK
(N
m)
Yükte
Yüksüz
0 0.5 1 1.5 2 2.5
-1
0
1
Selected signal: 60 cycles. FFT window (in red): 9 cycles
t (s)
AK
IM (A
)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.05
0.1
F (Hz)
Fundamental (50Hz) = 0.8619 , THD= 0.82%
Mag

33
3.5. PWM’lere Göre Kontrol Edilen Yüklerin Karşılaştırılması
Bu kısımda genel PWM yöntemleri ile kontrol edilen yükler üzerinde oluşan akım ve bu
çalışmada kullanılan basamak sinüs darbe genişlik modülasyonunun yükler üzerinde
oluşturduğu akımların karşılaştırılması yapıldı. Benzetim devresi Şekli 3.11’de verilmiştir.
Benzetim devresinde üç fazın her bir omik yükü için 0.5 ohm, üç fazın her bir endüktif
yükü için 8 mili Henry kullanılmıştır. Giriş gerilimi 70 Volt, Modülasyon indeksi olarak
0.9 değerleri kullanılmıştır. Anahtarlama frekansı için, 50 mikro saniyelik anahtarlama
süresi kullanılmıştır.
Şekli 3.11. Üç fazlı invertörle RL yüklerin benzetim devre modeli
RL yüklerin üç fazlı invertörle genel PWM yöntemi kullanılarak yapılan benzetim
çalışmasına göre yükler üzerinde oluşan akımlar Şekil 3.12’de verildiği gibidir.

34
Şekil 3.12. Genel PWM yöntemiyle kontrol edilen yükler üzerindeki akımlar.
RL yüklerin üç fazlı invertör ile SSPWM yöntemi kullanılarak yapılan benzetim
çalışmasına göre yükler üzerinde oluşan akımlar Şekil 3.13’de verildiği gibidir.
Şekil 3.13. SSPWM yöntemiyle kontrol edilen yükler üzerindeki akımlar.
İki farklı PWM yöntemiyle elde edilen yük akımlarının birlikte görünümü Şekil 3.14’de
verilmiştir.
0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-8
-6
-4
-2
0
2
4
6
8
t(s)
Akı
mla
r (A
)
Ia
Ib
Ic
0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-8
-6
-4
-2
0
2
4
6
8
t(s)
Akı
mla
r (A
)
Ia Ib Ic

35
Şekil 3.14. İki farklı PWM yöntemiyle elde edilen yük akımlarının birlikte görünümü
Elde edilen akım değerlerine bakıldığında basamak sinüs darbe genişlik modülasyon
yöntemine göre yük üzerinde oluşan I2 akımı daha düzgün sinüs şekline sahiptir. Genel
PWM yöntemlerine göre yükler üzerinde elde edilen akımda, sinüs şekli bozuk ve tepe
noktalara doğru köşeli kırılmalar meydana gelmektedir. Akım değerinin maksimum değeri
kare PWM yöntemlerinde bozunuma uğramakta, SSPWM yönteminde ise maksimum
değer daha yüksek değer almaktadır. Genel PWM yöntemlerinde elde edilen yük I1 akımı
ve toplam harmonik dağılımı aşağıda Şekil 3.15’de verilmiştir.
(a) (b)
Şekil 3.15. Kare PWM yöntemiyle elde edilen a) yük akımı b) harmonik dağılımı
Basamak sinüs darbe genişlik modülasyon yöntemine göre elde edilen yük akımı ve toplam
harmonik dağılım aşağıda Şekil 3.16’da verildiği gibidir.
0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-8
-6
-4
-2
0
2
4
6
8
t(s)
Akı
mla
r (A
)
I1
I2
0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-8
-6
-4
-2
0
2
4
6
8
t(s)
Akım
(A
)
0 2000 4000 6000 8000 100000
0.5
1
1.5
2
2.5
3
F (Hz)
Fundamental (100Hz) = 7.08 , THD= 6.95%
Mag

36
(a) (b)
Şekil 3.16. SSPWM yöntemine göre elde edilen a) yük akımı b) harmonik dağılımı
SSPWM yöntemine göre elde edilen yük akımının harmonik dağılımı %0.95 iken genel
PWM yöntemlerine göre yüklerden alınan akımın harmonik dağılımı %6.95 tür.
3.6. SPWM ve SSPWM’lere Göre Sürülen Dengesiz Yüklerin Karşılaştırılması
Benzetim devresinde üç fazın her bir omik yükü için 0.1ohm, iki fazın L1 ve L3 endüktif
yükleri için 40 mili Henry ve L3 endüktif yükü için 80 mili Henry kullanılmıştır. Giriş
gerilimi 70 Volt, Modülasyon indeksi olarak 0.9 değerleri kullanılmıştır. Anahtarlama
frekansı için, 50 mikro saniyelik anahtarlama süresi kullanılmıştır. SSPWM invertör
dengesiz yük sürmesi halinde yük akımlarının görünümü Şekil 3.17’de verilmiştir.
Şekil 3.17. SSPWM yöntemine göre elde edilen yük akımları
0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-8
-6
-4
-2
0
2
4
6
8
t(s)
Akım
lar
(A)
0 2000 4000 6000 8000 100000
0.5
1
1.5
2
2.5
3
F(Hz)
Fundamental (100Hz) = 7.124 , THD= 0.95 %
Mag

37
2L1=2L3=L2 ile SPWM invertör dengesiz yük sürmesi halinde yük akımlarının görünümü
Şekil 3.18’de verilmiştir.
Şekil 3.18. SPWM yöntemine göre elde edilen yük akımları
Basamak sinüs darbe genişlik modülasyon yöntemiyle sürülen yükün harmoniği Şekil
3.19’ da 1.86 olarak görülmektedir.
Şekil 3.19. SSPWM yöntemine göre elde edilen dengesiz yük akımının harmonik dağılımı
Şekil 3.20’de harmoniği ölçülen akımın şekli verilmiştir.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
F(Hz)
Fundamental (100Hz) = 0.9512 , THD= 1.86%
Mag

38
Şekil 3.20. SSPWM yöntemine göre elde edilen dengesiz yük akımı
Sinüs darbe genişliği modülasyon yöntemiyle sürülen dengesiz yüklerin harmoniği Şekil
3.21’de görüldüğü gibi % 2.90 dır.
(a) (b)
Şekil 3.21. SPWM yöntemine göre elde edilen a) yük akımı b) harmonik dağılımı
Çizelge 3.1. Farklı frekanslarda harmonik değerleri
SSPWM SPWM
Frekans THD Frekans THD
50 HZ 2.03 50 HZ 3.08
60 HZ 1.98 60 HZ 3
80 HZ 1.93 80 HZ 2.95
100 HZ 1.86 100 HZ 2.90
120 HZ 1.53 120 HZ 2.81
140 HZ 1.41 140 HZ 2.73
160 HZ 1.2 160 HZ 2.5
180 HZ 1.1 180 HZ 2.3
0.05 0.06 0.07 0.08 0.09 0.1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
T (s)
Am
per
0 2000 4000 6000 8000 100000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
F (Hz)
Fundamental (100Hz) = 0.9398 , THD= 2.90%
Mag
0.05 0.06 0.07 0.08 0.09 0.1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
T (s)
Am
per

39
Dengesiz yüklerle yapılan benzetim çalışmasında farklı frekans değerleri için yük akımının
harmonik distorsiyonları Şekil 3.22 ve Çizelge 3.1’de verilmiştir. 100 Hz de basamak sinüs
darbe genişlik modülasyonu (SSPWM) yöntemiyle sürülen yüklerde % 1.86 harmonik
distorsiyon oluşurken SPWM yöntemiyle sürülen yüklerde % 2.9 harmonik distorsiyon
oluşmaktadır. Aynı modülasyon indeksleri kullanılmasına rağmen modülasyon
farklılığından dolayı akımın tepe değerlerinde ve sinüs şekillerinde farklılıklar
oluşmaktadır.
Şekil 3.22. Dengesiz yüklerde SSPWM ve SPWM yöntemlerine göre farklı frekanslarda
harmonik dağılımı
3.7. Harmonik Etkisi Artırılmış Yüklerin SPWM ve SSPWM’lere Göre Sürülmesi
İnvertör devrelerinin sürdüğü yükler üzerinde doğrusal olmayan etkinin istenmeyen
sonuçlarını azaltılması için çeşitli invertör uygulamaları ve genel PWM yöntemleriyle
farklı invertör topolojisi çalışmaları yapılmıştır [47-57]. İnvertör devresinin sürdüğü
yüklerde yarı iletken anahtarların fazla olması ve bu anahtarların darbe genişlik
modülasyonuyla sürülmesi doğrusal olmayan etkiyi artırmaktadır. Şekil 3.23’de yüklerin
giriş ve çıkışına kontrol edilmesi gereken yarı iletken anahtarlar konularak yüklerin
doğrusal olmayan etkileri artırılmıştır. Benzetim devresinde üç fazın her bir omik yükü için
1ohm, üç fazın her bir endüktif yükü için 80 mili Henry kullanılmıştır. Giriş gerilimi 70
Volt, Modülasyon indeksi olarak 0.9 değerleri kullanılmıştır. Anahtarlama frekansı için, 5
mikro saniyelik anahtarlama süresi kullanılmıştır.
40 60 80 100 120 140 160 1801
1.5
2
2.5
3
3.5
F (Hz)
Har
mon
ik D
isto
rsiy
on
SSPWM
SPWM

40
Şekil 3.23. Doğrusal olmayan etkisi artırılmış 3 fazlı invertörün Matlab Simulink modeli
Genel PWM yöntemine göre sürülen omik ve endüktif yükün akımları Şekil 3.24’de
verildiği gibidir.
Şekil 3.24. SPWM’in kontrol ettiği doğrusal olmayan etkisi artırılmış yükün akımları
Genel SPWM yöntemine göre sürülen Ib yük akımı Şekil 3.25. a’da, harmonik dağılımı ise
Şekil 3.25.b’de verildiği gibidir.
0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-1.5
-1
-0.5
0
0.5
1
1.5
t(s)
Akı
mla
r (A
)
Ia Ib Ic

41
(a) (b)
Şekil 3.25 SPWM yöntemine göre sürülen. a) Ib yük akımı b) harmonik dağılımı
Basamak sinüs modülasyon yöntemine göre sürülen doğrusal olmayan etkisi artırılmış
yüklerin faz gerilimleri Şekil 3.26’ de verildiği gibidir.
Şekil 3.26. Doğrusal olmayan etkisi artırılmış yüklerin faz gerilimleri
SSPWM yöntemine göre sürülen doğrusal olmayan etkisi artırılmış omik ve endüktif
yükün akımları Şekil 3.27’de verildiği gibidir.
0.05 0.06 0.07 0.08 0.09-1
-0.5
0
0.5
1
Selected signal: 8 cycles. FFT window (in red): 3 cycles
Time (s)
Am
per
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
F(Hz)
Fundamental (80Hz) = 0.949 , THD= 4.70 %
Mag
-50
0
50
Volt
Uao
-50
0
50Ubo
Volt
0.05 0.06 0.07 0.08 0.09 0.1
-50
0
50
t(s)
Uco
Volt

42
Şekil 3.27. SSPWM’in kontrol ettiği doğrusal olmayan etkisi artırılmış yükün akımları
SSPWM yöntemine göre sürülen Ib yükün akımı Şekil 3.28.a’da, harmonik dağılımı ise
Şekil 3.28.b’de verildiği gibidir.
(a) (b)
Şekil 3.28. SSPWM yöntemine göre sürülen a) Ib yük akımı b) akımın harmoniği
İki farklı PWM le sürülen yüklerin bir arada görüntüsü Şekil 3.29’ da verildiği gibidir.
0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1
-1
-0.5
0
0.5
1
1.5
t(s)
Akı
mla
r (A
)
Ia Ib Ic
0.045 0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Selected signal: 8 cycles. FFT window (in red): 3 cycles
Time (s)
Am
per
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
F(Hz)
Fundamental (80Hz) = 0.9198 , THD= 1.19%
Mag

43
Şekil 3.29. SSPWM ve SPWM yöntemine göre sürülen yüklerin akımları
Genel PWM yöntemi kullanılarak doğrusal olmayan etkisi artırılmış yükün harmonik
dağılımı % 4.70 iken, SSPWM yöntemi kullanılarak sürülen yüklerin harmonik dağılımları
% 1.19 dur. Harmonik etkinin fazla olduğu akımın maksimum değeri daha düşük olduğu
Şekil 3.29’ da net bir şekilde görülmektedir.
Şekil 3.30. SSPWM ve SPWM yöntemlerine göre frekanslarda harmonik dağılımı
0.05 0.06 0.07 0.08 0.09 0.1
-1
-0.5
0
0.5
1
1.5
t(s)
Akı
mla
r (A
)
SSPWM Kontrol
SPWM Kontrol
50 100 150 200 2500.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
Frekans (Hz)
Harm
on
ik D
ağ
ılım
ı
SSPWM Kontrol
SPWM Kontrol

44
80 Hz de benzetim çalışmasının sonuçları verilen harmonik etkisi artırılmış yüklerin,
değişik frekanslarda harmonik değerleri Şekil 3.30’da verilmiştir. Şekil 3.30’ da görüldüğü
üzere; SSPWM’ in kontrol ettiği invertörün sürdüğü yük akımları üzerinde 50Hz de % 1.4
lük harmonik distorsiyonu oluşurken, SPWM’ in kontrol ettiği invertörün sürdüğü yük
akımları üzerinde 50Hz de % 5.4 lük harmonik distorsiyonu oluşmaktadır. Frekans 250Hz’
e kadar arttırıldığında SSPWM’in kontrol ettiği invertörün sürdüğü yük akımlarının
harmonik dağılımları % 1’ in altına düşerken, SPWM’ in kontrol ettiği invertörün sürdüğü
yük akımlarının harmonik dağılımları % 4’ün altına düşmektedir.

45
4. FARKLI DENETLEYİCİLERLE YAPILAN KONTROLDE SSPWM
YÖNTEMİNİN UYGULANMASI
Bu çalışmada önerilen PWM yöntemiyle asenkron motorun, çıkış değerleri alınıp referans
değerleriyle karşılaştırılarak Fuzzy, PID kontrolörlerle ve açık döngü benzetim çalışması
yapılmıştır.
4.1. Fuzzy Lojik (Bulanık Mantık) Kontrol
Doğrusal olmayan ve doğrusal olan kural tabanlarına göre daha doğal kural tabanı
kullanılarak daha iyi bir denetim gerçekleştirilebilir. Bu durumda kontrol edilen sistemin
performansı mükemmel bir şekilde iyileştirilip sistemde daha etkili ve duyarlı bir denetim
elde edilebilir. Yaygın şekilde kullanılan kontrol uygulamalarının çok girişi olup çok
sayıda parametrenin tasarlanıp, ayarlanması gerekir. Bu da uygulamayı zorlaştırıcı ve
zaman alıcı bir işlemdir. Oysa fuzzy lojik tabanlı bir denetleyicinin kuralları, doğrusal
olmayan özellikleri de dikkate alarak, çok sayıdaki girişi tekli ‘‘if ..... then ....’’ sözel
ifadeleriyle birleştirip uygulamayı basitleştirir. Ayrıca, bulanık mantık kullanılarak, çıkış
büyüklüğü VE (AND) gibi işlemcilerle birbirine bağlanmış iki veya daha fazla girişin bir
fonksiyonu olarak ifade edilebilir [56-58]. Fuzzy sistem 5 fonksiyonel bloktan oluşur. Bu
birimler; bulanıklaştırma, bilgi tabanı, kural tabanı, karar verme birimi ve durulaştırmadır.
Karar verme birimi fuzzy lojik kontrollerin en önemli birimidir. Bu birim kurallar üzerinde
sonuç çıkarma işlemlerini gerçekleştirir. Bulanıklaştırma giriş değişkenlerini ölçer, ölçü
haritaları ve bulanıklaştırma yapar. Bu blok içerisindeki işlemlerin sonucunda karşılaştırma
derecelerinin değerlerini bilimsel bir dille açıklar. Bilimsel dil kuralları ‘‘if ,then’’ formu
içindedir. Karar verme birimi fuzzy lojik kontrollerin en önemli birimidir. Bu birim
kurallar üzerinde sonuç çıkarma işlemlerini gerçekleştirir. Bilimsel dil kuralları ‘‘if ,then’’
formu içindedir. Sistemdeki giriş değerlileri; kontrol hatası (e), kontrol hatasındaki değişim
(de), kararın bulanık sonuçlarını kesin çıkış değerlerine çevirir. Üç girişli bir sistemde
bulanık değişkenler üç farklı bulanık küme ile gösterilir. Bunlar negatif (N), sıfır (Z) ve
pozitif (P) olarak tanımlandırılırlar. Sistemden gerçek zamanlı örneklenen değerler ile
daha önceden belirlenmiş ve örneklenmesi beklenen sinyaller karşılaştırılarak her
örnekleme anı için bir hata değeri elde edilir. Bu hata e(k) ve değişimi de(k) =e(k)-e(k-1)
nin değerleri bulanıklaştırma sürecine girer. e(k) ve de(k) bir veya birden fazla bulanık
kümeye aynı anda dahil olabilir. Bu sürecin sonunda, (e) ve (de) bulanık sayılara

46
dönüştürülür ve (du)’ nun belirlenmesi için kural tablosuna uygulanır. 3 bulanık küme için
kural karar tablosu Çizelge 2’de verildiği gibi 9 kurala sahiptir.
Çizelge 4.1. Üçlü fuzzy kural karar tablosu
de
N Z P
N N N N
e Z N Z P
P P P P
du
Bulanık karar verme yöntemleri kullanılarak bu kurallar işlenir ve sonuçta bulanık bir
yargıya varılır. Kural tablosu yardımı ile kontrol işaretindeki değişim ‘‘If-Then’’ sözel
ifadesi biçiminde tanımlanabilir. Çizelge 4.1’de sol ilk sütun (e) için sözel terimleri, üst
kısımdaki ilk satır (de) için sözel terimleri ve her ikisinin kesişimi ise (du) için sözel
ifadeleri göstermektedir.
Şekil 4.1. Hata ve hatanın değişimi
0 5 10 15 200
0.5
1
1.5
2
Kontrolsüz sinyal
Fuzzy Kontrollü sinyal
-0.1 -0.05 0 0.05 0.10
0.5
1
Üy
eli
k d
ere
cesi de(Hatanın değişimi)
0 0.5 1-1
-0.5
0
0.5
1
e (
Hata
)
Üyelik derecesi
de=e(k)-e(k-1)
e(k+a)=r(k+a)-y(k+a)

47
Pozitif ve negatif yönde hata ve hata değişiminin sinyal üzerinde gösterimi Şekil 4.1 de
verildiği gibidir.
Beş girişli bir sistemde bulanık değişkenler beş farklı bulanık küme ile gösterilir. Bunlar
negatif küçük(NS), negatif büyük (NB), sıfır (ZZ) ve pozitif büyük (PB), pozitif küçük
(PS) olarak tanımlandırılırlar. Sistemden gerçek zamanlı örneklenen değerler ile daha
önceden belirlenmiş ve örneklenmesi beklenen sinyaller karşılaştırılarak her örnekleme anı
için bir hata değeri elde edilir. 5 bulanık küme için kural karar tablosu Çizelge 4.2’de
verildiği gibi 25 kurala sahiptir.
Çizelge 4.2. Beşli fuzzy kural karar tablosu
de
NB NS ZZ PS PB
PB ZZ PS PS PB PB
PS NS ZZ PS PS PB
e ZZ NS NS ZZ PS PS
NS NB NS NS ZZ PS
NB NB NB NS NS ZZ
du
Şekil 4.2. Beş kümeli üyeliklerin karşılaştırılmaları

48
Beş kurallı fuzzy kural karar tablosunun Matlab Simulinkte ki üçgen üyelikleriyle
gösterimi Şekil 4.2’de gösterildiği gibidir.
Şekil 4.3. Hata ve hatanın değişiminin kurallar ile durulaştırmaya dönüşümünün
benzetim modeli
Benzetim modelindeki üyeliklerin hata hatanın değişiminin durulaştırmaya dönüşümü
sırsında birbirleriyle etkileşiminin bir bölümü Şekil 4.3.’de verildiği gibidir [58].
4.2. Oransal İntegral ve Türev Tipi Kontrolör (PID)
Uzun yıllardır kullanılan bu yöntem, istenilen çıkış (referans girişi) ile gerçek çıkış
arasındaki farka (hataya göre) göre çıkışın şiddetini ayarlar [59-61]. Bu yöntem; doğrusal
bir kontrol yöntemidir. Burada kontrol işlemi; oransal etki (P), oransal-integral etki (PI),
oransal-türev etki (PD) veya oransal-integral-türev (PID) etki yöntemleri ile gerçekleştirilir
[62].
Oransal integral ve türev kontrolörünün özelliklerinin bir arada kullanılmak istendiğinde,
bu tip bir kontrolör tercih edilir. Yani sistemin, hem sürekli durum hatası üretmemesi ve
hem de ani değişimlere karşı dayanıklı olması için; oransal, integral ve türev etkili

49
kontrolör kullanılır. KP oransal kazanç değeri, Ti integral kazanç değeri, TD türev kazanç
değeri. PID denklemi
)()1
()(
)()(dt
deTdte
TeKPID
t
Dt
i
tP
(4.1)
gibi ifade edilir [61-63].
4.3. Üç Fazlı Asenkron Motorun Benzetimi
380 volt, 3Hp, 60Hz, 1750, devir/dakika etiket değerine sahip asenkron motorun fuzzy
lojik kontrolörlü benzetim modeli Şekil 4.4’ de verilmiştir. Anahtarlama frekansı için, 50
mikro saniyelik anahtarlama süresi kullanılmıştır. Asenkron motorun rotor hızı ve faz
gerilimi gibi çıkış değerleri alınıp referans değerleriyle karşılaştırılarak girişteki 380Volt
DA kaynak fuzzy ve PID kontrolörlerle denetlenmiştir.
Şekil 4.4. Asenkron motorun fuzzy lojik kontrolörlü benzetim modeli
Fuzzy lojik, PID kontrolörlerle (KP=0.0008, Ki=0.0008,,KD=0.0004 ) ve açık çevrim
kontrol edilen asenkron motorun zamana göre tork değişimleri Şekil 4.5’de verilmektedir.

50
Şekil 4.5. Farklı kontrol yöntemleriyle kontrol edilen asenkron motorun torkları
Fuzzy lojik kullanılan kontrol yönteminde motorun torku kararlı hale 0.4 saniyede
gelirken, PID kontrolörle kontrol edilen motorun torku yaklaşık olarak 0.42 saniye
civarında kararlı hale gelmektedir. Kontrolcü kullanmadan açık çevrim olarak kontrol
edilen asenkron motorun torku yaklaşık 0.47 saniye civarında kararlı hale gelmiştir.
Fuzzy lojik, PID kontrolörlerle ve kontrolcü kullanılmadan kontrol edilen asenkron
motorun zamana göre stator geriliminin değişimleri Şekil 4.6’da verilmektedir.
Şekil 4.6. Farklı kontrol yöntemleriyle kontrol edilen asenkron motorun stator akımları
0 0.2 0.4 0.6 0.8 1-20
0
20
40
60
80
100
t(s)
To
rk (
Nm
)
PID Kontrol
Fuzzy LojikKontrol
Kontrolsüz
0 0.2 0.4 0.6 0.8 1-80
-60
-40
-20
0
20
40
60
80
t(s)
Sta
tor
Ak
ımla
rı(A
)
Fuzzy Lojik Kontrol
Kontrolsüz
PID Kontrol

51
Fuzzy lojik kullanılan kontrol yönteminde motorun stator akımı kararlı hale 0.4 saniyede
gelirken PID kontrolörle kontrol edilen motorun stator akımı yaklaşık olarak 0.42 saniye
civarında kararlı hale gelmektedir. Kontrolcü kullanmadan açık çevrim olarak kontrol
edilen asenkron motorun stator akımı yaklaşık 0.47 saniye civarında kararlı hale gelmiştir.
Fuzzy lojik, PID kontrolörlerle ve kontrolcü kullanılmadan denetlenen asenkron motorun
zamana göre rotor akımlarının değişimleri Şekil 4.7’de verilmektedir
Şekil 4.7. Farklı kontrol yöntemleriyle kontrol edilen asenkron motorun rotor akımları
Fuzzy lojik kullanılan kontrol yönteminde motorun rotor akımı kararlı hale 0.4 saniyede
gelirken PID kontrolörle kontrol edilen motorun rotor akımı yaklaşık olarak 0.42 saniye
civarında kararlı hale gelmektedir. Kontrolcü kullanmadan açık çevrim olarak kontrol
edilen asenkron motorun rotor akımı yaklaşık 0.47 saniye civarında kararlı hale gelmiştir.
Fuzzy lojik, PID kontrolörlerle ve kontrolcü kullanılmadan denetlenen asenkron motorun
zamana göre devir değişimleri Şekil 4.8’de verilmektedir. Seçilen kazanç değerlerinden
dolayı PID kontrol ile denetlenen motorun devri açık çevrim kontrole göre daha erken
hızlanırken kararlı halede daha erken oturmaktadır. İnvertörün giriş gerilimi anahtarlanarak
kontrol edildiği için ve seçilen kontrolör değerlerinden dolayı sonuç değerlerinde aşınım
oluşmamaktadır.
0 0.2 0.4 0.6 0.8 1-80
-60
-40
-20
0
20
40
60
80
t(s)
Ro
tor
Ak
ımla
rı (
A)
PID Kontol
Kontrolsüz
Fuzzy Lojik Kontrol

52
Şekil 4.8. Farklı kontrol yöntemleriyle kontrol edilen asenkron motorun devirleri
Fuzzy lojik kullanılan kontrol yönteminde 0.4 saniyede motorun devri 1750 devir/dakika
da kararlı hale gelirken, PID kontrolörle kontrol edilen motorun devri 0.42 saniye civarında
1750 devir/dakika da kararlı hale gelmektedir. Kontrolcü kullanmadan açık çevrim olarak
kontrol edilen asenkron motorun devri yaklaşık 0.47 saniye civarında 1750 devir/dakika da
kararlı hale gelmiştir.
0 0.2 0.4 0.6 0.8 1-200
0
200
400
600
800
1000
1200
1400
1600
1800
t(s)
Roto
r H
ızı
(rpm
)
Fuzzy Lojik Kontrol
Kontrolsüz
PID Kontrol

53
5. İNVERTÖR DEVRESİNİN GERÇEKLEMESİ
5.1. Üç Fazlı İnvertör Gerçekleme Şekli ve Baskı Devresi
Benzetimleri yapılan çalışmanın gerçekleme aşamasında, ilk önce 100 Hz frekansta omik
ve endüktif yükler sürülmüştür. İkinci olarak da 3 fazlı asenkron motor sürülerek devri, faz
gerilimleri ve hatlar arası gerilimleri farklı frekanslarda ölçülmüştür. Gerçeklemesi yapılan
devre deki mosfetleri etkin şekilde sürmek için sürücü devresi tasarlanmıştır. Tasarlanan
bu sürücü devresinde mosfetlerin tamamı N tipi kullanılmıştır. Yapılan sürücü sistemi iyi
bir performans göstererek sistemin uzun süre ısınmadan çalışmasını sağlamıştır. Aşağıda
Şekil 5.1’de PIC 16F877A ile kontrol edilen RL yüklü invertör devresi verilmiştir. Omik
yükler için 20Ω, endüktif yükler için 24mili Henry, anahtarlama frekansı olarak 20 KHz
kullanılmıştır, gerçekleme aşamasında kullanılan elemanlar tablo halinde Çizelge 5.6’da
verilmiştir.
Şekil 5.1. Üç fazlı invertör gerçekleme devre modeli
Benzetimleri yapılan çalışmaların gerçek elamanlarla uygulamaları yapılabilmesi için
gerçekleme devre modeline göre baskı devresi yapıldı. Baskı devresi yapılan invertörün
montajlı görünümü Şekil 5.2’de verilmiştir.

54
Şekil 5.2. Üç fazlı invertörün uygulama devresi
5.2. Üç Fazlı İnvertörle Omik ve İndüktif Yük Sürülmesi
38 volt AA gerilimi altında 20Ω, 24mili Henry endüktif ve omik yükler, Basamak sinüs
darbe genişlik modülasyon tekniğiyle sürülmüştür. 50Hz ve 100Hz sürülen RL yüklerin
hatlar arası gerilimin sinüs akışının görünümü Şekil 5.3.’de verilmiştir.
(a)
(b)
Şekil 5.3. RL yüklerin a) 100 Hz de hatlar arası gerilimi b) 50 Hz de hatlar arası gerilimi
Şekil 5.4. de kare PWM yöntemleriyle sürülen RL yükün sinüs gerilim akışının görünümü
verilmiştir.

55
Şekil 5.4. Kare PWM kullanılarak sürülen yükün hatlar arası sinüs geriliminin akışı
Şekil 5.5.a’da verilen şekillerde, basamak sinüs darbe genişlik modülasyon tekniğiyle
yükler üzerinde tam sinüs akışı sağlanırken. Şekil 5.5.b’de görülen, mikrokontrolörlerin
ürettiği ya da klasik PWM tekniklerini kullanan invertörlerin oluşturduğu gerilimin sinüs
akışı istenilen seviyeye ulaşmamıştır.
(a) (b)
Şekil 5.5. a) SSPWM yöntemiyle sürülen RL yükün gerilim sinüs akış b) Kare PWM
yöntemiyle sürülen RL yükün sinüs gerilimi

56
(a)
(b)
Şekil 5.6. a) SSPWM yöntemiyle sürülen RL yükün iki faz sinüs gerilim akışı b) Kare
PWM yöntemiyle sürülen RL yükün iki faz sinüs gerilim akışı
Kare PWM ve SSPWM yöntemleriyle 35Hz de sürülen 3 fazlı yüklerin 2 fazlarının
karşılaştırılması Şekil 4.6’da göründüğü gibidir.
5.3. Üç Fazlı İnvertörle 3 Fazlı Asenkron Motorun Sürülmesi
3 fazlı RL yükler, invertör devresiyle başarıyla sürüldükten sonra; 380 Volt,1.05 Amper,
Cosφ=0.73, hızı 1400 devir/dakika olan üç fazlı asenkron motor sürülmüştür. Motor düşük
gerilim seviyelerinde nominal yük değerinin 1/5’i kadar yüklenebilmiştir. Anahtarlama
frekansları olarak 200-20KHz dir. Şekil 5,7’de, Şekil 5,8’de ve Şekil 5,9’da 3 fazlı
asenkron motorun frekansları değiştirilerek devirleri ve gerilimleri gözlenmiştir. Nominal
geriliminin yaklaşık 1/6’sı kadar değerde sürüldüğü için motorun milinin sürtünme
etkilerinden dolayı frekans değerlerinde, motor devri çıkması gereken devir değerlerinin

57
altında kalmaktadır. Artan frekans değerlerinde akımın düşmesi ve torkun azalmasından
dolayı devirdeki değer kaybı artmaktadır.
(a) (b)
Şekil 5.7. ASM’nin 90 Hz de a) hatlar arası gerilimi ve devri b) 30 Hz de hatlar arası
gerilimi ve devri.
İlk olarak benzetimi yapılan asenkron motor çalışmasının bu defa gerçek elemanlarla
uygulaması gerçekleştirilmiştir. Bölüm 3 deki benzetimlerde alınan hatlar arası gerilim bu
defa gerçek elemanlarla yapılan deneysel çalışmalarda alınmıştır. Hatlar arası gerilim 49
Volt ve 90Hz lik ve 30Hz, 47Volt alternatif gerilim değerleri Şekil 5.7’de verilmiştir.
Osiloskop ekranında görülen frekans farklılığına bağlı olarak takometrede okunan değerler
görülmektedir. 30Hz, 47Volt alternatif gerilim için 715devir / dakika okunurken, 90Hz,
49Volt alternatif gerilim için 2050 devir/ dakika okunmaktadır.
(a) (b)
Şekil 5.8. ASM’nin a) faz gerilimi ve devri b) hatlar arası gerilimi ve devri

58
(a) (b)
Şekil 5.9. ASM’nin a) 58Volt-150Hz de hatlar arası gerilimlerin sinüs eğrisi ve devri
b) 55Volt-40Hz de hatlar arası gerilimlerin sinüs eğrisi ve devri
Girişine 70Volt DC gerilim uygulanan invertörle, 150 Hz gibi yüksek frekansta sürülen 3
fazlı asenkron motorun 2 hat geriliminin muntazam sinüs akış eğrileri Şekil 5.9’da
görülmektedir. 70 volt DA giriş gerilimi uygulanan invertörle sürülen asenkron motorun
hatlar arası PWM şeklinde gerilimi Şekil 5.10’de verildiği gibidir.
Şekil 5.10. Motorun PWM şeklinde hatlar arası gerilimi
70 volt DA giriş gerilimi uygulanan invertörle sürülen asenkron motorun 67 Hz de hatlar
arası iki faz sinüs gerilimleri Şekil 5.11’de verildiği gibidir.

59
Şekil 5.11. Asenkron motorun 67 Hz de hatlar arası iki faz sinüs gerilimleri
Asenkron motorun hatlar arası geriliminin 1KHz deki FFT sonucu Şekil 5.12 de
verilmiştir. 50 voltluk gerilim üzerinde 1.5 voltluk harmonik salınımları oluşmaktadır.
Harmonik distorsiyonu ana harmonik değerinin yaklaşık % 3’ü kadardır.
Şekil 5.12. Asenkron motorun hat geriliminin FFT değeri
Asenkron motorun hatlar arası geriliminin frekans arttıkça harmonik salımın azaldığı Şekil
5.12’de görülmektedir.
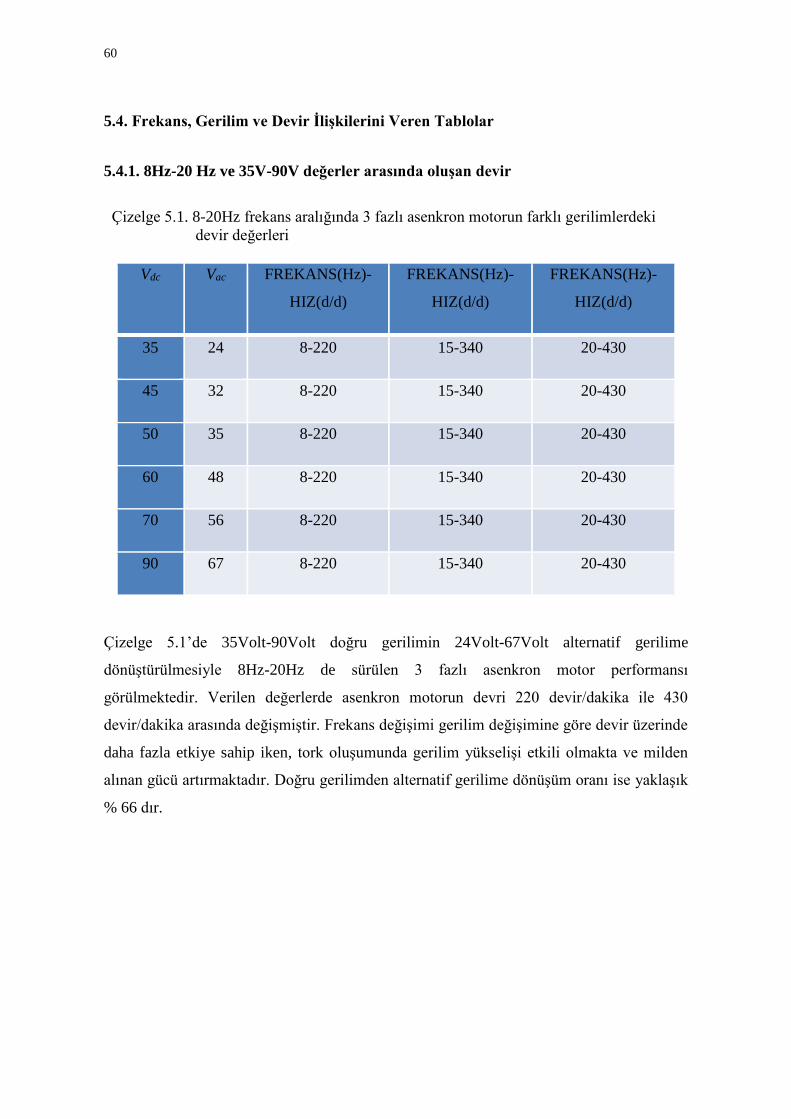
60
5.4. Frekans, Gerilim ve Devir İlişkilerini Veren Tablolar
5.4.1. 8Hz-20 Hz ve 35V-90V değerler arasında oluşan devir
Çizelge 5.1. 8-20Hz frekans aralığında 3 fazlı asenkron motorun farklı gerilimlerdeki
devir değerleri
Vdc Vac FREKANS(Hz)-
HIZ(d/d)
FREKANS(Hz)-
HIZ(d/d)
FREKANS(Hz)-
HIZ(d/d)
35 24 8-220 15-340 20-430
45 32 8-220 15-340 20-430
50 35 8-220 15-340 20-430
60 48 8-220 15-340 20-430
70 56 8-220 15-340 20-430
90 67 8-220 15-340 20-430
Çizelge 5.1’de 35Volt-90Volt doğru gerilimin 24Volt-67Volt alternatif gerilime
dönüştürülmesiyle 8Hz-20Hz de sürülen 3 fazlı asenkron motor performansı
görülmektedir. Verilen değerlerde asenkron motorun devri 220 devir/dakika ile 430
devir/dakika arasında değişmiştir. Frekans değişimi gerilim değişimine göre devir üzerinde
daha fazla etkiye sahip iken, tork oluşumunda gerilim yükselişi etkili olmakta ve milden
alınan gücü artırmaktadır. Doğru gerilimden alternatif gerilime dönüşüm oranı ise yaklaşık
% 66 dır.

61
5.4.2. 25Hz-40Hz ve 35V-90 V değerler arasında oluşan devir
Çizelge 5.2. 25-40 Hz frekans aralığında 3 fazlı asenkron motorun farklı gerilimlerdeki
devir değerleri
Vdc Vac FREKANS(Hz)-
HIZ(d/d)
FREKANS(Hz)-
HIZ(d/d)
FREKANS(Hz)-
HIZ(d/d)
35 24 25-560 32-720 40-820
45 32 25-560 32-720 40-820
50 35 25-560 32-735 40-830
60 48 25-560 32-740 40-845
70 56 25-560 32-745 40-865
90 67 25-560 32-760 40-890
Çizelge 5.2’de 35-90Volt doğru gerilim, 24-67Volt alternatif gerilim değerlerine
dönüştürülerek 25Hz-40Hz arasında sürülen 3 fazlı asenkron motorun performansı
verilmiştir. Verilen değerlerde asenkron motorun devri 560 devir/dakika ile 890
devir/dakika arasında değişmiştir. Yine frekans değişimi gerilim değişimine göre devir
üzerinde daha fazla etkiye sahip iken tork oluşumunda gerilim yükselişi etkili olmakta ve
milden alınan gücü artırmaktadır. Gerilim dönüşümü ise yaklaşık % 66 oranında
gerçekleşmiştir. Devirdeki artış düzgün olarak değişmektedir.

62
5.4.3. 45Hz-70Hz ve 35V-90V değerler arasında oluşan devir
Çizelge 5.3. 45-70Hz frekans aralığında 3 fazlı asenkron motorun farklı
gerilimlerdeki devir değerleri
Vdc Vac FREKANS(Hz)-
HIZ(d/d)
FREKANS(Hz)-
HIZ(d/d)
FREKANS(Hz)-
HIZ(d/d)
35 24 45-1000 55-1290 70-1520
45 32 45-1010 55-1350 70-1680
50 35 45-1032 55-1380 70-1720
60 48 45-1043 55-1393 70-1750
70 56 45-1050 551420 70-1760
90 67 45-1060 55-1460 70-1780
Çizelge 5.3’ de, 35-90Volt doğru gerilim, 24-67Volt alternatif gerilim değerlerine
dönüştürülerek 45Hz-70Hz arasında sürülen 3 fazlı asenkron motor performansı
görülmektedir. Verilen değerlerde asenkron motorun devri 1000 devir/dakika ile 1780
devir/dakika arasında değişmiştir. Yine frekans değişimi ve gerilim değişimi devir
üzerinde etki göstermiştir. 50Hz ve 1400 devir /dakika standartlarında üretilen asenkron
motor 55Hz ve 70Hz frekansta sürülerek motor devri, etiket değerlerinin üzerine çıkmıştır.
Tork oluşumunda gerilim yükselişi etkili olmakta ve milden alınan gücü artırmaktadır.
Gerilim dönüşümü ise yaklaşık % 66 oranında gerçekleşmiştir. Devirdeki artış düzgün
olarak değişmiştir.

63
5.4.4. 90Hz-150Hz ve 35V-90V değerler arasında oluşan devir
Çizelge 5.4. 90-150Hz frekans aralığında 3 fazlı asenkron motorun farklı gerilimlerdeki
devir değerleri
Vdc Vac FREKANS(Hz)-
HIZ (d/d)
FREKANS(Hz)-
HIZ (d/d)
FREKANS(Hz)-
HIZ (d/d)
FREKANS(Hz)-
HIZ (d/d)
35 24
45 32 90-1930
50 35 90-2000 110-2040
60 48 90-2060 110-2400
70 56 90-2080 110-2560 130-2800 150-3100
90 67 90-2100 110-2580 130-2900 150-3250
Çizelge 5.4’ de görüldüğü üzere, 35-90Volt doğru gerilim ve 24-67Volt alternatif gerilim
değerlerine dönüştürülerek 90Hz-150Hz arasında 3 fazlı asenkron motor başarıyla
sürülmüştür. Verilen değerlerde asenkron motorun devri 1930 devir/dakika ile 3250
devir/dakika arasında değişmiştir. Yine frekans değişimi ve gerilim değişimi devir
üzerinde etki göstermiştir. 380Volt-50Hz ve 1400 devir /dakika standartlarında üretilen
asenkron motor 90Hz ve 150Hz frekansta sürülerek devri etiket değerlerinin üzerine
çıkartılmıştır. Bunu sonucunda da motorun devri kendi özgün değerinin 2,5 katı civarında
olmuştur. Tork oluşumunda gerilim yükselişi etkili olmakta ve milden alınan gücü
artırmaktadır. Gerilim dönüşümü ise yaklaşık % 66 oranında gerçekleşmiştir. Devirdeki
artış düzgün olarak değişmiştir.

64
5.5. Frekans Gerilim Ve Devir İlişkilerini Veren Grafik Şekilleri
Bu kesimde alternatif gerilime dönüştürülen doğru gerilim değerleri dönüştürülen frekans
değerleriyle birlikte grafik şeklinde verilmiştir. Şekil 5.13.’ de 3 fazlı asenkron motorun
8Hz ve 32Hz de gerilim devir ilişkisini veren eğriler görülmektedir.
(a) (b)
Şekil 5.13. 3 fazlı asenkron motorun a) 8Hz de gerilim devir değişimi b) 32Hz de gerilim,
devir değişimi
Şekil 5.14’ de 3 fazlı asenkron motorun 40Hz ve 45Hz de gerilim devir ilişkisini veren
eğriler görülmektedir.
(a) (b)
Şekil 5.14. 3 fazlı asenkron motorun a) 40Hz de gerilim devir değişimi b) 45Hz de gerilim
devir değişimi
30 40 50 60 70 80 90219
219.2
219.4
219.6
219.8
220
220.2
220.4
220.6
220.8
221
Doğru Gerilim(V)
Mo
tor
Hız
ı (d
/d)
8Hz
30 40 50 60 70 80 90720
725
730
735
740
745
750
755
760
765
Doğru Gerilim(V)
Mo
tor
Hız
ı (d
/d)
32Hz
20 30 40 50 60 70 80 90820
830
840
850
860
870
880
890
900
Doğru Gerilim(V)
Mo
tor
Hız
ı (d
/d)
40Hz
30 40 50 60 70 80 901000
1010
1020
1030
1040
1050
1060
Doğru Gerilim(V)
Moto
r H
ızı
(d/d
)
45Hz

65
(a) (b)
Şekil 5.15. 3 fazlı asenkron motorun a) 55Hz de gerilim devir değişimi b) 70Hz de gerilim
devir değişimi
Şekil 5.15. a’da 3 fazlı asenkron motorun, invertöre uygulanan 90Voltluk DA gerilim ile
üretilen 55Hz lik alternatif gerilimde hızı 1460 devir/dakikaya oturmaktadır. Şekil 5.15.b’
de 3 fazlı asenkron motorun, uygulanan 90Voltluk DA gerilim ile üretilen 70Hz lik
alternatif gerilimde, hızı 1760 devir/dakikaya oturmaktadır.
(a) (b)
Şekil 5.16. 3 fazlı asenkron motorun a) 90Hz de gerilim devir değişimi b) 110Hz de
gerilim devir değişimi
Şekil 5.16 a’ da 3 fazlı asenkron motorun, invertöre uygulanan 90Voltluk DA gerilim ile
üretilen 90Hz lik alternatif gerilimde hızı 2000 devir/dakika ya ulaşmaktadır. Şekil 5.16 b’
de 3 fazlı asenkron motorun, üretilen 110Hz lik alternatif gerilimde invertöre uygulanan
30 40 50 60 70 80 901280
1300
1320
1340
1360
1380
1400
1420
1440
1460
Doğru Gerilim(V)
Moto
r H
ızı
(d/d
)
55Hz
30 40 50 60 70 80 901500
1550
1600
1650
1700
1750
1800
Doğru Gerilim(V)
Moto
r H
ızı
(d/d
)
70Hz
20 30 40 50 60 70 80 900
500
1000
1500
2000
2500
Doğru Gerilim(V)
Moto
r H
ızı
(d/d
)
90Hz
30 40 50 60 70 80 900
500
1000
1500
2000
2500
3000
Doğru Gerilim (V)
Mo
tor
Hız
ı (d
/d)
110HZ
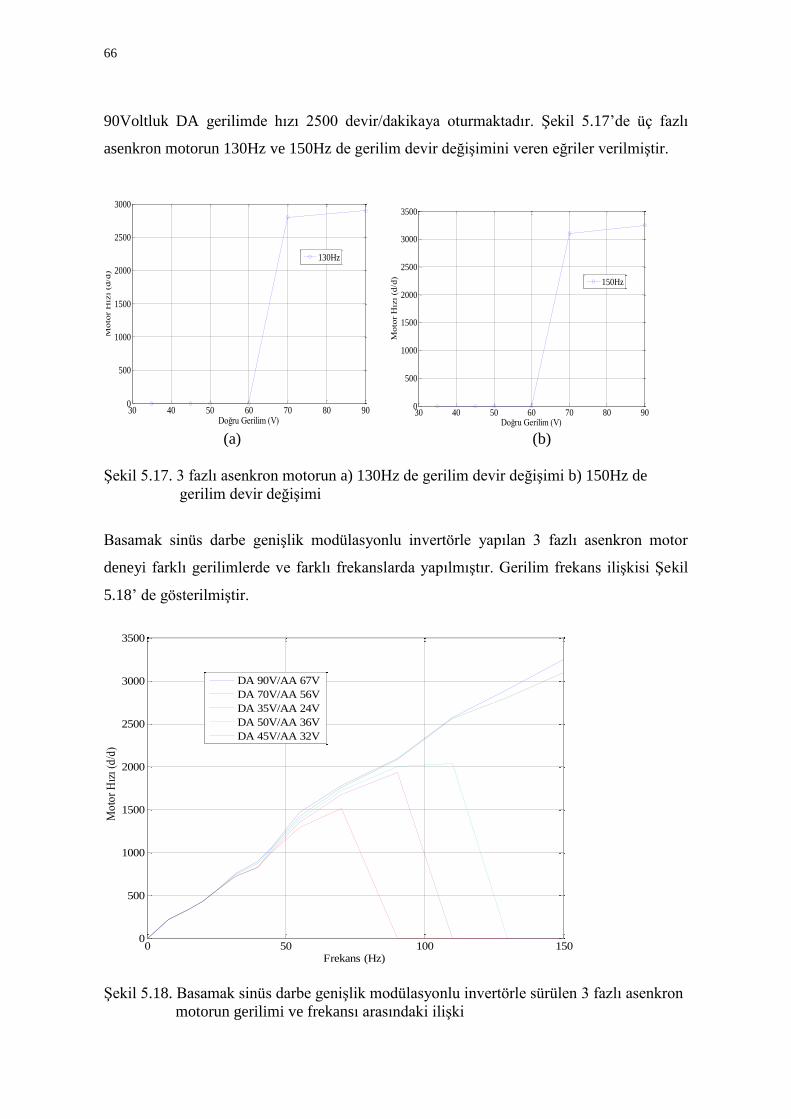
66
90Voltluk DA gerilimde hızı 2500 devir/dakikaya oturmaktadır. Şekil 5.17’de üç fazlı
asenkron motorun 130Hz ve 150Hz de gerilim devir değişimini veren eğriler verilmiştir.
(a) (b)
Şekil 5.17. 3 fazlı asenkron motorun a) 130Hz de gerilim devir değişimi b) 150Hz de
gerilim devir değişimi
Basamak sinüs darbe genişlik modülasyonlu invertörle yapılan 3 fazlı asenkron motor
deneyi farklı gerilimlerde ve farklı frekanslarda yapılmıştır. Gerilim frekans ilişkisi Şekil
5.18’ de gösterilmiştir.
Şekil 5.18. Basamak sinüs darbe genişlik modülasyonlu invertörle sürülen 3 fazlı asenkron
motorun gerilimi ve frekansı arasındaki ilişki
30 40 50 60 70 80 900
500
1000
1500
2000
2500
3000
Doğru Gerilim (V)
Mo
tor
Hız
ı (d
/d)
130Hz
30 40 50 60 70 80 900
500
1000
1500
2000
2500
3000
3500
Doğru Gerilim (V)
Mo
tor
Hız
ı (d
/d)
150Hz
0 50 100 1500
500
1000
1500
2000
2500
3000
3500
Frekans (Hz)
Mo
tor
Hız
ı (d
/d)
DA 90V/AA 67V
DA 70V/AA 56V
DA 35V/AA 24V
DA 50V/AA 36V
DA 45V/AA 32V

67
4.6. Üç Fazlı ASM’nin Dengesiz Faz Gerilimiyle Sürülmesi
Basamak sinüs darbe genişlik modülasyonlu invertörle yapılan dengesiz faz gerilimli 3
fazlı asenkron motor deneyi farklı gerilimlerde ve farklı frekanslarda yapılmıştır. 45Volt-
90Volt DC gerilim, 32Volt-67Volt arasında alternatif gerilime dönüştürülmüştür. Düşük
gerilim değerlerinde yüksek frekans uygulanarak asenkron motor yüksek devirlerde
sürülmüştür. 24Volt alternatif gerilim değerinde 90Hz’e kadar motor devri mevcut iken,
70Hz değerinde maksimum 1500 devir/ dakikaya ulaşmıştır. 90Hz değerinden sonra devir
sönüme uğramış ve gerilime ihtiyaç duymuştur. 3 fazlı asenkron motorun fazlarından
birine omik yük bağlanarak dengesiz faz geriliminde Şekil 5.19’ daki gibi sürülmüştür.
Şekil 5.19. Asenkron motorun dengesiz faz geriliminde sürülmesi
1-) Asenkron motor
2-) Omik yük
3-) İnvertör
4-) DA kaynak
5-) Osiloskop
Faz farklı dengesiz yük gerilimlerinin osiloskop görünümü Şekil 5.20’ de verildiği gibidir.
Dengesiz faz gerilimi altında sürülen asenkron motor farklı frekanslar ve gerilim
değerlerinde sürülüştür, bunun sonucunda oluşan performans durumu Çizelge 5.5’de
verildiği gibidir.

68
Şekil 5.20. Faz farklı dengesiz yük gerilimlerinin osiloskop görünümü
5.6.1. Asenkron motorun 45Hz-70Hz ve 35V-90V değerler arasında oluşan
devirler
Çizelge 5.5. 45-70Hz frekans aralığında dengesiz faz gerilimli asenkron motorun
farklı gerilimlerdeki devir değerleri
DC
VOLT
AC
VOLT
FREKANS(Hz)-
DEVİR(d/d)
FREKANS(Hz)-
DEVİR(d/d)
FREKANS(Hz)-
DEVİR(d/d)
35 24 45-900 55-1200 70-1500
45 32 45-1000 55-1300 70-1640
50 35 45-1032 55-1350 70-1700
60 48 45-1043 55-1373 70-1720
70 56 45-1050 55-1400 70-1740
90 67 45-1060 55-1420 70-1760
Çizelge 5.4’ de görüldüğü üzere, 35-90 Volt doğru gerilim 24-67Volt alternatif gerilim
değerlerine dönüştürülerek 45Hz-70Hz arasında 3 fazlı asenkron motor başarıyla

69
sürülmüştür. 45Hz de motor devri 900 devir/dakika iken 70Hz de 1760 devir/dakika
olmuştur. Fazlar üzerine düşen gerilimler Şekil 5.19’ de görüldüğü gibi, farklı değerlerde
olmasına rağmen motor başarıyla sürülmüştür.
380Volt-50Hz 1400 d/d lik üç fazlı asenkron motor 100Volt DA gerilimle yüklü olarak
çalıştırıldığında frekanslara göre akım-tork değişimi aşağıda Şekil 5.21’de verilmiştir.
Şekil 5.21. Üç fazlı asenkron motor akım, tork değişimi
Şekil 5.18’ de akım – tork grafiğine göre 20Hz lik bir frekansta motor akım 1.3 Ampere
ulaşırken, motorun torku 0.42 Nm olmaktadır. 40Hz lik bir frekansta motorun akımı 0.9
Ampere ulaşırken torku 0.35 Nm olmaktadır. 50Hz lik bir frekansta akım 0.82 ampere
ulaşırken tork 0.33 Nm olmaktadır. Motor düşük gerilim seviyelerinde nominal yük
değerinin 1/5’i kadar yüklenebilmiştir. Devrenin uygulaması için farklı Mikrochip ve
mosfet türleri kullanılmıştır. Kullanılan malzemeler tablo halinde Çizelge 5.6’da
verilmiştir.
0 0.5 10.1
0.15
0.2
0.25
0.3
0.35
Akım(A)
To
rk (
Nm
)
0 0.5 10.1
0.2
0.3
0.4
0.5
Akım(A)
To
rk (
Nm
)
0 0.5 10.1
0.2
0.3
0.4
0.5
Akım(A)
To
rk (
Nm
)
0 0.5 10.1
0.15
0.2
0.25
0.3
0.35
Akım(A)
To
rk (
Nm
)
50Hz
20Hz
30Hz 40Hz

70
Çizelge 5.6. İnvertör devresi için kullanılan elemanlar
Malzeme Adet Temel Değerleri
1 PIC16f877a 1 10Mhz
2 PIC 18f4550 1 20Mhz
3 Mosfet 6n60 6 600V-6A 70Mhz
4 Mosfet 540n 6 100V-33A 70Mhz
5 Mosfet IRFP 6 75V-330A 50Mhz
6 PC817 6 20V
7 Kristal 1 10.4Mhz
8 Kapasitör 2 22pf
9 Direnç 10 1k
10 Direnç 3 5k
11 Direnç 3 0.47k

71
6. SONUÇ VE ÖNERİLER
Bu çalışmada tasarım aşamasında invertör devresi için yeni matematiksel yöntemler
araştırılmıştır ve sunulmuştur. Daha sonra matematiksel modeli çıkartılan invertör
devresinin omik ve endüktif yüklerde ve 3 fazlı asenkron motorla benzetimleri başarıyla
yapılmıştır. Uygulama aşamasında gerçek elemanlarla deneyler yapılmıştır. Böylesine üst
düzey bir uygulama rahatlıkla temin edilebilecek malzemelerden oluşturulan genel invertör
devre modeliyle sağlamıştır. Bu uygulama da 2 adet PWM kanalı olan ve 3 fazlı invertör
devresi için yetersiz sayılabilecek 16f877A ve 18f4550 denetleyiciler, yapılan yazılımla 6
adet PWM üretir hale getirilerek üç fazlı invertör devresi için yeterli hale getirilmiştir.
Yapılan gerçekleme çalışmalarında daha uzun süre ısınmadan çalışmasını sağlamak için
PC817 optocoupler ile kendine has sürücü sistemi oluşturulmuştur. Bu sayede kontrol
ünitesiyle güç devresi arasında üst düzey bir yalıtım sağlanmıştır. Sürücü devresi için
PC817 kullanılması sürücü devre maliyetini düşürürken, kolay temin edilebilen malzeme
kullanılmasını da sağlamıştır. Bu uygulamada SSPWM üretmek için, basamak sinüs
sinyalleri ile farklı büyüklükte iki üçgen sinyallin karşılaştırılması yapılmıştır. Bu sayede
bugüne kadar kullanılan sinüs sinyalleri ile üçgen sinyallerin karşılaştırılmasına farklılık
getirilmiştir. Basamak sinüs sinyallerinin kullanılması üretilen PWM’lerin doğrusal olarak
artırıp azalmasını sağlamıştır. Bu durum da, sistemin düşük harmonik üretmesine izin
vermiştir. Örnek olarak, 75Volt DC giriş gerilim uygulanan invertör 3 fazlı asenkron
motoru 150 Hz frekansta rahat bir şekilde sürmüştür. Sürülen asenkron motorun stator
akımının harmonik değeri % 0.82 olmuştur. Benzetim çalışmasında, üç fazlı RL yükün
500Hz frekansta sürülmesinde ise akımın harmonik değeri % 0.52 dir. Dengesiz yükler
altında invertör devresi % 1.86 gibi bir harmonik üretmekte ve buda kabul edilir bir değeri
göstermektedir. Yüklerin giriş ve çıkışlarına PWM’ler ile kontrol edilen anahtarların
eklenmesiyle doğrusal olmayan etkisi artırılarak sürülmüştür. Fazladan 6 anahtarın
PWM’ler ile kontrol edilmesi karşın yük akımlarının harmonik dağılımları % 1.19
olmuştur. İnvertör devresinin motor kontrolü için fuzzy lojik ve PID kontrolörler
kullanarak motor parametreleri üzerindeki performansları gözlendi. Yapılan
uygulamalarda, Şekil 4.9 da 3 fazlı asenkron motor, 150Hz 70Volt DA, 58Volt AA
gerilimde 3248 devire/dakika ya ulaşmıştır. Asenkron motorun fazlarından birine omik yük
bağlanarak motorun değişik frekanslarda rotor hızı gözlenmiştir ve fazlar arası gerilimin
sinüs şekli bozulmadığı ve yüksek frekanslarda motorun nominal devrinin üzerine çıktığı
görülmüştür. Aynı zamanda invertörün başka bir üstünlüğü ise piyasada kullanılan

72
invertörlerin maliyetinin 1/10 kadar olmasıdır. Bundan dolayı da düşük maliyette yüksek
ergonomi sağlanarak, ilk defa PIC 16f877a ve PIC 18F4550 gibi denetleyiciler ile basamak
sinüs darbe genişlik modülasyonlu 3 fazlı invertör uygulaması başarıyla sağlanmıştır. Bu
çalışma, tehlike arz eden veya enerjinin olmadığı güneş pillerinin kullanıldığı ortamlarda,
düşük gerilimlerle düşük harmonikle yüksek frekansta 3 fazlı yüklerin rahatlıkla
sürülebileceğini göstermektedir. İnvertör devresindeki sürücü sisteminin dirençleri ve güç
devresindeki anahtarları yüksek gerilim seviyeleri için tekrar ayarlandığında yüksek
voltajlarda da yük sürülmesi mümkün olabilecektir. Geniş aralıklarda frekansının
ayarlanabilmesi sayesinde ve nominal yük ve gerilim şartlarında kalibre edildiğinde
piyasada güç invertörlerine alternatif olabilecektir. Bu çalışmamın yüksek akım taşıyan
mosfetler kullanılarak, askeri alanda kullanılan cihazların ihtiyaç duyduğu alternatif akım
enerji dönüşümünü sağlamada kullanılmak için modifiye edilebileceği önerilirken; bunu
yanı sıra enerji hatlarından uzak noktalarda, güneş enerjisi ile üç fazlı alternatif akım
motorlarının sürmesi önerildi.
73
KAYNAKLAR
1. Lawrence and S. Middlekau. (2005). The new guy on the block. Industry
Applications Magazine, IEEE, 142-148.
2. European Commission. (2010). Luxembourg, Publications Office of the European
Union accessedon. 2030-2010.
3. Mohamed, E. and Zhengming, Z. (2010). Grid-connected photovoltaic power
systems Renewable and Sustainable Energy Reviews, 14(1),112-129
4. N. A. Rahim, J. Selvaraj, C. Krismadinata. (2010). Five level inverter with dual
reference modulation technique for grid-connected PV system. Renewable Energy,
35(3), 712-720.
5. Beser, E., Arifoglu, B., Camur, S., Beser, K. (2011). A grid-connected photovoltaic
power conversion system with single-phase multilevel inverter. Solar Energy, 84(12),
2056-2067.
6. Busquets, S., Rocabert, J., Rodriguez, P., Alepuz, S. (2008). Multilevel diode-
clamped converter for photovoltaic generators with independent voltage control of
each solar array. IEEE Transactions on Industrial Electronics, 55(7), 2713-2723.
7. Calais, M., Agelidis, V. G., Dymond, M. S. (2001). A cascaded inverter for
transformerless single - phase grid- International Journal Of Renewable Energy
Research. 22(1), 255-262.
8. Calais, M., Agelidis, V. G., Meinhardt, M. (1999). Multilevel converters for single-
phase grid connected photovoltaic systems: an overview. Solar Energy, 66(5), 325-
335.
9. Alonso J., Eloy, J., Arnaltes, S. (2010). Direct power control of grid connected PV
systems with three level NPC inverter. Solar Energy, 84(7), 1175-1186.
10. Fernão Pires, V., Martins, J. F., Foito, D., Chen, H., (2012). A Grid Connected
Photovoltaic System with a Multilevel Inverter and a Le-Blanc Transformer.
Internationa Journal of Renewable Energy Research, 2(1), 117-118.
11. Salazar, L., Joos, G. (1994). PSPICE simulation of three-phase inverters by means of
switching functions. Transactions Power Electron, 9(1), 35–42.
12. Enjeti, P. N., Ziogas, P. D. (1990). Analysis of a static power converter under
unbalance: A novel approach. Transactions Ind. Electron, 37(2), 91–93.
13. Cavalcanti, M. C., Farias, A. M., Neves, F. A. S., Afonso, J. L. (2012). Eliminating
leakage currents in neutral point clamped inverters for photovoltaic systems.
Transactions Power Electron, 59(1), 435–443.

74
14. Mohammadi, H. P., Bina, M. T. A. (2001). Transformerless Medium Voltage
STATCOM Topology Based on Extended Modular Multilevel Converters. Power
Electronics, Transactions on, 26, 1534-1545.
15. Salmon, J. (2009). Single-Phase Multilevel PWM Inverter Topologies Using Coupled
Inductors. Power Electronics, Transactions on, 24, 1259-1266.
16. Xiaobin, M., Jiuhe W., Hao, X., Yuling, M. (2011). Study on a control strategyfor
three-phase voltage sources pwm dc/ac inverter based on pch model. In Electrical
Machines and Systems (ICEMS), 1, 4-2011.
17. Dong, K., Dong, L. (2010). Feedback linearization control of three-phase ups inverter
systems. Transactions on Industrial Electronics, 57(3), 963-968.
18. Dahono, P. A., Purwadi, A. (1995). An LC filter design method for single- phase
PWM inverters, Power Electronics and Drive Systems, 2, 571-576.
19. Kim, J., Choi, H. H. (2000). Output LC filter design of voltage source inverter
considering the performance of controller, Power System Technology, 3, 1659-1664.
20. Sozer, Y., Torrey, D. A., Reva, S. (2000). New inverter output filter topology for
PWM motor drives. Power Electronics, Transactions, 15(6), 1007-1017.
21. Dahono, P. A., Bahar, Y. R., Sato, Y., (2001). Damping of transient oscillations on
the output LC filter of PWM inverters by using a virtual resistor. Power Electronics
and Drive Systems, 1, 403-407.
22. Dahono, P. A., Taryana, E. (2003). A new control method for single-phase PWM
inverters to realize zero steady-state error and fast response. Power Electronics and
Drive Systems (PEDS), 2, 888-892.
23. Cougo, B. (2011). Parallel Three-Phase Inverters Optimal PWM Method for Flux
Reduction in Intercell Transformers. Power Electronics, Transactions on, 26, 2184-
2191.
24. Garcia, A. M., Liop, T. A., Novotny, D. W. (1998). A new induction motor V/f
control method capable of high-performance regulation at low speeds, Transactions
Ind.Applicat, 34(4), 813-821.
25. Parekh, R., (2003). AC Induction Motor Fundamentals. Application Note (AN887),
4(2), 83-821.
26. Crowder, R., (2005). Induction Motors. Electric Drives and Electromechanical
Systems, 191-214.
27. Escalante, M. F., Vannier, J. C. (2002). Flying Capacitor Multilevel Inverters and
DTC Motor Drive Applications. Transactions on Industry Electronics. 49(4), 809-
815.

75
28. Yedamale, P. (2002). Speed Control of 3-Phase Induction Motor Using PIC18
Microcontrollers. Application Note (AN843).
29. Bowling, S., (2005). An Introduction To AC Induction Motor Control Using the
dsPIC30 MCU, Application Note(AN984), Microchip Technology Inc.
30. Burroughs, J. (2004). Controlling 3-Phase AC Induction Motors Using the
PIC18F4431. Application Note (AN900), Microchip Technology Inc.
31. Barambones, O., Garrido, A.J. (2004). A sensorless variable structure control of
induction motor drives. ElectricPower Systems Research, 72(2004), 21–32.
32. Tipsuwan, V., Keanthong, K., Charean, A., Runghimmawan, T. (2006). Design and
Implementation Multilevel Inverter for 3 phase Induction Motor Speed Control with
RBM Chopper Technique embedded on FPGA. Power System Technology, 1(2), 4 –5
33. Fonseca, J., Afonso, J. L., Martins, J. S., Couto, C. (1999). Fuzzy logic speed control
of an induction motor. Microprocessors and Microsystems, 22(1999), 523–534
34. Addoweesh, K. E., Shepherd, W., Hulley, L. N. (1989). Induction motor speed control
using a microprocessor based PWM inverter. Industrial Electronics, Transactions
36(4), 516 -522.
35. Vithal V., Deshpande, S. M. (1980). Microprocessor Control of a Three-Phase
inverter action, Transactions on, 27(4), 291-298
36. Abbondanti, A. (1977). Method of flux control in induction motors driven by variable
frequency, variable voltage supplies. Proc. IEEE-IAS Int. Semi-Annual Power
Conversion Conf. 177-184
37. Haluk, İ. (2011). Asenkron Motorun Alan Yönlendirmeli Kontrolü İçin Geliştirilmiş
Methodun Dsp İle Karġılaġtırılması. Yıldız Teknik Üniversitesi Fen Bilimleri
Enstitüsü Yüksek Lisans Tezi, İstanbul.
38. Yahia, H., Liouane, N., Dhifaoui, R. (2010). Weighted Differential Evolution Based
PWM Optimization for Single Phase Voltage Source Inverter. International Review
of Electrical Engineering, 5(5), 1956–1962.
39. Hagh, M. T., Taghizadeh, H., Razi, K. (2009). Harmonic Minimization in Multilevel
Inverters Using Modified Species-Based Particle Swarm Optimization. Transactions
Power Electron, 24(10), 2259– 2267.
40. Ozpineci, B., Tolbert, L. M., Chiasson, J. N. (1985). Harmonic optimization of
multilevel converters using genetic algorithms. IEEE Power Electron. 3(3), 92–95.
41. Taghizadeh, J. N., Hagh, M. T. (2010). Harmonic Elimination of Cascade Multilevel
Inverters with Nonequal DC Sources Using Particle Swarm Optimization.
Transactions Industrial Electron, 57(11), 3678– 3684..

76
42. Dudrik, J. (2003). Soft Switching PWM DC-DC Converters for High Power
Applications. Proc. Of the International Conference. 2003, Gliwice-Niedzica,
Poland, 11-11-12.
43. Rashid, M. H. (1993). Power electronics: circuits, devices and application. Prentice
Hall, Electric Power Components and Systems, 41(2012),1-5.
44. Charles, I. O. (2015).Sinusoidal Pulse-width Modulated Three-phase Multi-level
Inverter Topology. Electric Power Components and Systems, 43 (2015)-1
45. Mu, X., Wang J., Gu W., Xu S.(2011). Passivity–Based of Photovoltaic Grid-
Connected Inverter Based on Nonlinear Current Control Strategy. Symposium on
Power Electronics & Electrical Drives Proceedings. 2(11), 298-302.
46. Wang, J., Xia P., Zhang, J. (2008). Control Strategy of Three-Phase AC / DC Voltage
–Source Converters Based on Storage function. Workshop on Power Electronics and
Intelligent Transportation System, 117-121.
47. Wang, J. (2008). The nonlinear control for the voltage source PWM rectifier. Beijing:
China Machine Press,160-163.
48. Jagabar, S. M., Ramani, K. (2015). A New Symmetric Cascaded Multilevel Inverter
Topology Using Single and Double Source Unit. Journal of Power Electronics,
15(4), 951-963.
49. Neelashetty, K., Ramesh K. (2011). Comparison of 3-Level and 9-Level Inverter-
Fed Induction Motor Drives.Research Journal of Applied Sciences, Engineering and
Technology, 3(2), 123– 131.
50. Kannan, R., Ali, J., Selvam, S.(2015). A New Symmetric Multilevel Inverter
Topology Using Single and Double Source Sub- Multilevel Inverters. Journal of
Power Electronics, 15(1), 76–98.
51. Binbin, L., Dandan, X., Dianguo X. (2014). Circulating Current Harmonics
Suppression for Modular Multilevel Converters Based on Repetitive Control. Journal
of Power Electronics, 14 – 6.
52. Chose, G., Park, M. (1989). An Improved PWM Technique for A.C. Chopper. IEEE
Trans. On Power Electronics, 4(4), 96 – 505.
53. Jang, D., Choe, G. (1991). Asymmetrical PWM Method for A.C. Chopper with
Improved Input Power Factor. IEEE PESC Conference. Power Electronics, 83 -845.
54. Chetanya, G, Devbrat, K, Abhishek, V., Tahir, K., Kapil, D. S.(2012). Harmonic
Analysis of Seven and Nine Level Cascad Multilevel Inverter using Multi-Carrier
PWM Technique., International Journal of Power Electronics and Drive System,
4(8), 196 -505.
55. Lucanu, M., Ursaru, O., Aghion, C. (2003). Single Phase A. C. Choppers with
I.G.B.T’s, Proceedings of the International Symposium on Signal. Circuits and

77
Systems, 10(11), 213-216.
56. Congwei, L., Bin, V., Zargari, N. R., Devei, X., Jiacheng, W. (2009). A novel three-
phase three leg AC/AC converter using nine IGBT’s. Transactions On Power
Electron, 24(5) , 1151-1160.
57. Altas, I. H., Sharaf, A. M. (1994). A Novel Fuzzy Logic Controller For Maximum
Power Extraction From a PV Array Driving a Threephase Induction Motor, 7th
Mediterranean Electrotechnical Conference (MELECON’94), Antalya, Turkey,
12(14), 853-856.
58. Altas, I. H, (1998). The Effects of Fuzziness in Fuzzy Logic Controllers, 2nd
International Symposium on Intelligent Manufacturing Systems, , Sakarya University,
Sakarya, Turkey, 211-220.
59. Tzafestas, S., Papanikolopoulos, N. E. (1990). Incremental Fuzzy Expert PID Control.
Transactions Industrial Electron, 37(1), 365-371.
60. Selvaraj, J., Rahim, N. A. (2009). Multilevel Inverter for Grid-Connected PV
Systems Employing Digital PI controller. IEEE Transactions on Industrial
electronics, 56(1), 149-158.
61. Gerry, J. P. (1987). A comparison of PID control algorithms. Control Engineering,
34(3), 102–105.
62. Hang, C. C., Sin, K. K. (1999). A comparative performance study of PID auto-tuners.
IEEE Control System. 11(5), 41–47.
63. Kaya, A., Scheib, T. J. (1988). Tuning of PID controls of different structures. Control
engineering. 35(7), 62–65.

78

79
ÖZGEÇMİŞ Kişisel Bilgiler
Soyadı, adı : CAN, Erol
Uyruğu : T.C.
Doğum tarihi ve yeri : 01.10.1976, Bayburt
Medeni hali : Evli
e-mail : [email protected]
Eğitim
Derece
Doktora
Eğitim Birimi
Gazi Üniversitesi / Elektrik Eğitimi
Mühendisliği
2016
Yüksek lisans KTÜ /Elektrik-Elektronik Mühendisliği
2010
Lisans Marmara Üniversitesi /Elektrik Eğitimi 2001
Lise Bayburt Endüstri Meslek Lisesi/Elektrik 1995
İş Deneyimi
Yıl Yer Görev
2009-Halen Erzincan Üniversitesi Uzman
Yabancı Dil
İngilizce
Yayınlar
SCI ve SCI-E Kapsamındaki Yayınlar
1. Can, E., Sayan H.H. (2016). SSPWM Three Phase Inverter Design and
Implementation For Unstable Loads.’ Power electronic, Electrical Engineering and
Technology, Technical Gazette. 23(3), 512 - 520
2. Can, E., Sayan, H.H. (2016). The Increasing Harmonic Effects of SSPWM Controlling
Loads Currents are Investigated on Modulation Index.’’ Electrical machines,
Electrical Engineering and Technology, Technical Gazette. 23(5), 711 - 719
80
Sempozyumda Sunulan Bildiriler
1. Can, E., Sayan, H.H. (2015). Artıran dönüştürücü devresi için uzay durum
denklemlerinin oluşturulması. Matder ,Niğde Üniversitesi
2. Can, E., Sayan, H.H. (2015). İnvertör devresi için farklı bir uygulamalı. Matder, Niğde
Üniversitesi.





![PROSTEEL 2008 Sergi Mekanları Düzenlemesl [EXPO Merkezi] Çelik Yapı Tasarımı Öğrenci Yarışması 1. Teşvik Ödülü](https://static.fdokumen.com/doc/165x107/6336198bcd4bf2402c0b5bdc/prosteel-2008-sergi-mekanlari-duezenlemesl-expo-merkezi-celik-yapi-tasarimi.jpg)














