
Drives, motori, automazione - Lenze
244
Drives, motori, automazione La soddisfazione per i nostri prodotti e servizi nei più disparati settori industriali è il nostro orgoglio. Lenze Solution partner Lenze è il partner competente per le vostre applicazioni. Lenze non fornisce solo compo- nenti, ma offre soluzioni complete di aziona- mento ed automazione. In aggiunta, grazie alla propria rete mon- diale, voi ed i vostri clienti, potrete contare su una qualificata ed efficiente assistenza pre e post vendita. Il nostro sistema di qualità certifica la progettazione, la produzione, la vendita e l’assistenza dei nostri prodotti in conformità alle normative DIN ISO 9001 : 2000. Il nostro sistema per la tutela dell’ambiente è anch’esso certificato secondo DIN EN ISO 14001. La soddisfazione dei nostri clienti costitui- sce la miglior verifica della qualità dei nostri prodotti. La nostra missione è di rispondere alle vostre esigenze, offrendo le soluzioni miglio- ri, più tecnologiche e competitive. Verificate personalmente. Sistema completo, performante, unico
-
Upload
khangminh22 -
Category
Documents
-
view
2 -
download
0
Transcript of Drives, motori, automazione - Lenze

Drives, motori, automazione
La soddisfazione per i nostri prodotti e servizi nei
più disparati settori industriali è il nostro orgoglio.
Cat
alog
o: D
rive
s, m
otor
i, au
tom
azio
ne
· Con
ten
uto
sog
gett
o a
mod
ific
he
· Ed
izio
ne
10/2
006
5k
“I nostri Clienti vengono prima di tutto. La loro soddisfazione è la nostra
motivazione. Pensare in termini di vantaggi per il Cliente significa aumen-
tare la nostra produttività grazie all’affidabilità dei nostri prodotti.”
“Da noi riceverete esattamente ciò di cui avete bisogno: prodotti e soluzio-
ni in perfetta sinergia e con le funzioni richieste per le vostre macchine e i
vostri impianti. Questo è ciò che intendiamo per qualità.”
“Fate leva sul nostro know-how, maturato in oltre 50 anni di esperienza in
vari settori e tradotto coerentemente in prodotti innovativi, in funzioni di
motori e azionamento all'avanguardia e in soluzioni chiavi in mano per
applicazioni specifiche .”
“Facciamo nostri i vostri obiettivi e puntiamo a raggiungere una partner-
ship di lunga durata, vantaggiosa per entrambe le parti. Potrete contare su
servizi competenti per realizzare le vostre esigenze. Siamo sempre a vostra
disposizione per offrirvi il nostro supporto in tutti i processi chiave.”
Lenze Gerit S.r.l.
Sede di Milano: Viale Monza, 338 · 20128 Milano
Telefono +39 02 270 98.1 · Telefax: +39 02 270 98 290
Filiale di Bologna: via del Sostegno, 26/A · 40131 Bologna
Telefono +39 051 63 50 511 · Telefax: +39 051 63 48 640
Helpline internazionale 24h: numero verde 008000 2446877
“Il mondo è il nostro mercato. Progettiamo e produciamo a livello
internazionale per essere vicini a voi, ovunque voi siate nel mondo.”
www.lenzegerit.it
Dri
ves,
mo
tori
, au
tom
azio
ne
Lenze Solution partner
Lenze è il partner competente per le vostre
applicazioni. Lenze non fornisce solo compo-
nenti, ma offre soluzioni complete di aziona-
mento ed automazione.
In aggiunta, grazie alla propria rete mon-
diale, voi ed i vostri clienti, potrete contare
su una qualificata ed efficiente assistenza
pre e post vendita.
Il nostro sistema di qualità certifica la
progettazione, la produzione, la vendita e
l’assistenza dei nostri prodotti in conformità
alle normative DIN ISO 9001 : 2000.
Il nostro sistema per la tutela dell’ambiente
è anch’esso certificato secondo DIN EN ISO
14001.
La soddisfazione dei nostri clienti costitui-
sce la miglior verifica della qualità dei nostri
prodotti.
La nostra missione è di rispondere alle
vostre esigenze, offrendo le soluzioni miglio-
ri, più tecnologiche e competitive.
Verificate personalmente.
Buono a sapersi perché siamo qui per voi
Sistema completo, performante, unico

Panoramica Drives, motori, automazione
Pannelli operatore Drive PLC Servoinverter 9300
Inverter9300 vector
Invertersmd
Inverter8200 vector
Inverter on board
8200 motec
Avviatore on boardstarttec
Servoinverter ECS per applicazioni multiasse
Moduli di comunicazione
Software di configurazione
Software applicativi
Tastiere XT Moduli d’automazione
Riduttori, Motoriduttori e Motori
Componenti e Freni
IP20 I/O system
INDONESIA
P.T. Futurindo GlobalsatyaJl.: Prof. Dr. Latumenten No. 18Kompleks PerkantoranKota Grogol Permai Blok A 35JAKARTA 11460Buero 1:Phone +62 (0)21 / 766 42 34
765 86 23Telefax +62 (0)21 / 766 44 20Buero 2:Phone +62 (0)21 / 567 96 31
567 96 32Telefax +62 (0)21 / 566 87 50
IRAN
Tavan Ressan Co. Ltd.P.O.Box. 19395-5177No. 44, Habibi St.,South Dastour St.,Sadr EXP’Way,TEHRAN 19396Phone +98 21 / 260 26 55
260 67 66260 92 99
Telefax +98 21 / 200 28 83
ISRAEL *
Greenshpon Engineering Works LTDBar-Lev Industrial ParkMISGAV 20179Phone +972 4 99 13 18 1Telefax +972 4 99 13 47 7
ITALY *
Gerit Trasmissioni S.p.A.Viale Monza 33820128 MILANOPhone +39 02 / 270 98.1Telefax +39 02 / 270 98 290
JAPAN *
Miki Pulley Co., Ltd.1-39-7 Komatsubara, Zama-cityKANAGAWA 228-8577Phone +81 (0)462 / 58 16 61Telefax +81 (0)462 / 58 17 04
LATVIA
see LITHUANIA
LITHUANIA
Lenze UABBreslaujos g.344403 KAUNASPhone +370 37 407174Telefax +370 37 407175
LUXEMBOURG *
see BELGIUM
MACEDONIA
Lenze Antriebstechnik GmbHPretstavnistvo Skopjeul. Nikola Rusinski 3/A/21000 SKOPJEPhone +389 2 30 90 090Telefax +389 2 30 90 091
MALAYSIA
D.S.C. Engineering SDN BHD3A & 3B, Jalan SS21/56BDamansara Utama47400, PETALING JAYA, SELANGOR Phone +60 (0)3 / 77 25 62 43
77 25 62 4677 28 65 30
Telefax +60 (0)3 / 77 29 50 31
Lenze S.E.A. Sdn BhdDamansara Technology ParkNo. 28, Jalan PJU 3/4747810, PETALING JAYA, SELANGOR
MAURITIUS
Automation & Controls Engineering Ltd3, Royal Road, Le Hochet, Terre RougeMAURITIUSPhone +230 248 8211Telefax +230 248 8968
MEXICO
Automatización y Control de Energía S.A. de C.V.Av. 2 No. 89 Esq Calle 13Col. San Pedro de los PinosC.P. 03800 MEXICO D.F.Phone +52 (55)5277/5998Telefax +52 (55)5277/5937
MOROCCO
GUORFET G.T.D.R Automatisation IndustrielleBd Chefchaouni Route 110 km, 11.500No. 353-Aîn-SabaâCASABLANCAPhone +212/22-35 70 78Telefax +212/22-35 71 04
NETHERLANDS *
Lenze B.V., Postbus 31 015203 DC`S-HERTOGENBOSCHPloegweg 155232 BR`S-HERTOGENBOSCHPhone +31 (0)73 / 64 56 50 0Telefax +31 (0)73 / 64 56 51 0
NEW ZEALAND *
Tranz Corporation343 Church StreetP.O. Box 12-320, PenroseAUCKLANDPhone +64 (0)9 / 63 45 51 1Telefax +64 (0)9 / 63 45 51 8
NORWAY *
Dtc- Lenze asStallbakken 5, 2005 RAELINGENPhone +47 / 64 80 25 10Telefax +47 / 64 80 25 11
PHILIPPINES
Jupp & Company Inc.Unit 224 Cityland Pioneer Bldg.,Pioneer StreetMANDALUYONG CITYPhone +63 2 / 687 7423
683 0042683 0047
Telefax +63 2 / 687 7421
POLAND
Lenze-Rotiw Sp. z o.o.ul. Ro˝dzieƒskiego 188b40-203 KATOWICEPhone +48 (0)32 / 2 03 97 73Telefax +48 (0)32 / 7 81 01 80
Lenze Systemy Automatyki Sp. z o.o.Ul. Rydygiera 4787-100 TORU¡Phone +48 (0)56 / 6 58 28 00
6 45 34 606 45 35 70
Telefax +48 (0)56 / 6 45 33 56
PORTUGAL *
Costa Leal el VictorElectronica-Pneumatica, Lda.Rua Prof. Augusto Lessa, 269,Apart. 520534202-801 PORTOPhone +351-22 / 5 50 85 20Telefax +351-22 / 5 02 40 05
ROMANIA
see AUSTRIA
RUSSIA
Inteldrive1-st Buhvostova Street 12/11Korpus 18 Office 213MOSCOW 107258Phone +7 (0) 095 / 748 78 27Telefax +7 (0) 095 / 963 96 86
SERBIA-MONTENEGRO
see MACEDONIA
SINGAPORE *
see MALAYSIA
SLOVAC REPUBLIC
ECS Sluzby spol. s.r.o.Staromlynska 2982106 BRATISLAVAPhone +421 2 45 25 96 06
+421 2 45 64 31 47+421 2 45 64 31 48
Telefax +421 2 45 25 96 06
SLOVENIA
Lenze pogonska tehnika GmbHZbiljska Cesta 41215 MEDVODEPhone +386 (0)1 361 61 41Telefax +386 (0)1 361 22 88
SOUTH AFRICA *
S.A. Power Services (Pty.) Ltd.Unit 14, Meadowbrook Business EstatesJacaranda Ave, OlivedaleRandburg 2158P.O.Box 1137RANDBURG 2125Phone +27(11) 462-8810Telefax +27(11) 704-5775
SOUTH KOREA *
Hankuk Mechatro Ltd.Room# 1409 Samhwan officetel 830-295Beomil-dong, Dong-GuPUSANPhone +82 (0)51-635-6663Telefax +82 (0)51-635-6632
SPAIN *
Lenze Transmisiones, S.A. (Headquarter)Milà i Fontanals, 135-13908205 SABADELLBarcelona Phone +34 937 207 680Telefax +34 937 120 215
Lenze Delegación BilbaoP.I. Ibarrabarri. Ed. METRO 2º-E48940 LEJONAVizcayaPhone +34 944 630 510/ 507Telefax +34 944 314 196
Lenze Delegación LevanteCullera, 73 – 4ºD46035 BENIMAMET ValenciaPhone +34 963 905 220/335Telefax +34 963 900 647
Lenze Delegación MadridArturo Soria, 187 – Of. 828043 MADRID Phone +34 915 103 341Telefax +34 915 102 061
SWEDEN *
Lenze Transmissioner ABP.O.Box 10 74, Attorpsgatan, Tornby Ind.58110 LINKÖPINGPhone +46 (0)13 / 35 58 00Telefax +46 (0)13 / 10 36 23
SWITZERLAND *
Lenze Bachofen AGAckerstrasse 458610 USTERPhone +41 (0) 43 399 14 14Telefax +41 (0) 43 399 14 24
Vente Suisse Romande:Route de Prilly 251023 CRISSIERPhone +41 (0)21 / 63 72 19 0Telefax +41 (0)21 / 63 72 19 9
SYRIA
Zahabi Co.8/5 Shouhadaa StreetP.O.Box 8262ALEPPO-SYRIAPhone +963 21 21 22 23 5Telefax +963 21 21 22 23 7
TAIWAN *
ACE Pillar Co. Ltd.No.12, Lane 61, Sec. 1, Kuanfu RoadSan-Chung CityTAIPEI HSIENPhone +886 (0)2 / 299 58 40 0Telefax +886 (0)2 / 299 53 46 6
THAILAND
PackSys Global (Thailand) Ltd.429 Moo 7Theparak Road, Tambol TheparakAmphur MuangSAMUTPRAKARN 10270Phone +66 2 383 5633Telefax +66 2 383 5637
TUNESIA
AMF Industrielle SarlRoute de Gremda - Km 0,2Immeuble El Madina,Centre Bloc B - 5 ème - appt 523002 SFAXPhone +216 74 403 514Telefax +216 74 402 516
TURKEY
LSE Elektrik Elektronik MakinaOtomasyon Mühendislik San. Ve Tic. Ltd. Sti.Atatürk mah. Cumhuriyet cad.Yurt sok. No:7ÜMRANIYE/ISTANBULPhone +90 (0)216 / 316 5138 pbxTelefax +90 (0)216 / 443 4277
Bursa Address:Demirtaspasa Mh.Ata Sk. Petek Bozkaya Is MerkeziD Blok No :5 / A OSMANGAZI / BURSAPhone +90 (0)224-2733232 pbx
+90 (0)224-2734151+90 (0)224-2733238
Telefax +90 (0)224-2734150
UKRAINE
SV Altera, Ltd.Lepse ave., 4 KIEV, 03067Phone +38 044 496 18 88Telefax +38 044 496 18-18
UNITED ARAB EMIRATES
LPT (FZC)Executive Suite X4-37P.O. Box: 9304, SAIF ZONESHARJAH AIRPORT INTERNATIONALFREE ZONE (SAIF ZONE)Phone +971 6 5573205Telefax +971 6 5573206
UNITED KINGDOM/EIRE *
Lenze Ltd.Caxton RoadBEDFORD MK 41 OHTPhone +44 (0)1234 / 32 13 21Telefax +44 (0)1234 / 26 18 15
USA *
AC Technology Corp.630 Douglas StreetUXBRIDGE, MA 01569Phone +1 508 / 278-9100Telefax +1 508 / 278-7873
Lenze Corporation1730 East Logan AvenueEMPORIA, KS 66 801 Phone +1 620 / 343-8401
+1 888 / 269-2381Telefax +1 620 / 342-2595
+1 800 / 469-0931
Lenze DETO Drive Systems USA, LLC5912 Sterling DriveHOWELL, MI 48843 Phone +1 517 / 586-4057Telefax +1 517 / 586-4058
œ* Countries connected to the free expert helpline 008000 24 hours (008000 24 46877)

Unico produttoreUnica tecnologiaUnica assistenza nel mondo
L'articolato "pacchetto motion control" Lenze costi-
tuisce un sistema completo e scalare composto da
componenti hardware elettronici e maccanici e da rela-
tivi software applicativi e di configurazione.
Il sistema Lenze, basato sulla tecnologia di automazio-
ne “Drive based” è ora in grado d'offrire anche soluzio-
ni “PC based”.
Il concetto d’intelligenza distribuita applicato nei
drive, la disponibilità di soluzioni “on board” e la per-
fetta integrazione di ogni componente permette la rea-
lizzazione di sistemi di azionamento decentrati straor-
dinariamente flessibili.
Ogni componente del sistema, dal PLC al motori-
duttore, è studiato in funzione degl’altri per offrire
uniformità di qualità, ottimizzazione di potenza e una
pluralità di combinazioni davvero unica e tale da copri-
re qualsiasi tipo di richiesta.
Poter contare su di un unico partner qualificato, in
grado di seguire ogni fase del progetto ed assicurare
un efficiente servizio post vendita, con il medesimo
standard qualitativo in tutto il mondo, costituisce un
ulteriore vantaggio senza pari.
Lenze Un programma completo che fa la differenza

Drives CA Sez. 1
Programma drives pagg. 1-1 . . . . . . 1-3
Inverter
Inverter smd (smart micro drive) (0,25 - 22 kW)Caratteristiche pagg. 1-5 . . . . . . 1-7Dati tecnici pagg. 1-8 . . . . . . 1-9Installazione, fusibili, interruttori automatici e cavi pag. 1-10Accessori dedicati pagg. 11 . . . . . . . 1-13
Inverter 8200 vector (0,25 - 110 kW)Caratteristiche pagg. 1-15 . . . . . 1-19Dati tecnici pagg. 1-20 . . . . . 1-25Transistor di frenatura integrato pag. 1-26
Inverter vettoriale 8200 motec (0,25 - 7,5 kW)Caratteristiche pagg. 1-27 . . . . . 1-31Dati tecnici pag. 1-32 . . . . . 1-33Transistor di frenatura integrato pag. 1-34
Avviatori Starttec (0,25 - 4 kW)Caratteristiche pagg. 1-35 . . . . . 1-38
Inverter ad alte prestazioni 9300 vector (0,37 - 400 kW)Caratteristiche pagg. 1-39 . . . . . 1-44Transistor di frenatura integrato pag. 1-45Dati tecnici pagg. 1-46 . . . . . 1-48
ServoInverter
Servo intelligenti monoasse serie 9300 (0,37 - 75 kW)Descrizione pagg. 1-49 . . . . . 1-53Firmware, funzioni tecnologiche pagg. 1-54 . . . . . 1-56Servo PLC pag. 1-57Caratteristiche pag. 1-58Dati tecnici pagg. 1-59 . . . . . 1-60
Servo positioning serie 940 (2 - 36 A)Caratteristiche pagg. 1-61 . . . . . 1-63Dati tecnici pag. 1-64Dimensioni pag. 1-65
Servo multiasse serie ECS (4 - 64 A)Caratteristiche pagg. 1-67 . . . . . 1-70Moduli asse pagg. 1-71 . . . . . 1-72Moduli alimentatore pagg. 1-73 . . . . . 1-74Moduli condensatore pagg. 1-75Dimensioni pagg. 1-76
Strumenti Software
Global Drive Control (GDC) pagg. 1-77 . . . . . 1-80Cam Designer pag. 1-81Drive Developer Studio (DDS) pag. 1-82Interfaccia PC, CAN pag. 1-83
Alimentatori e sistemi di frenaturaAlimentatori con recupero e senza in rete pag. 1-84 . . . . . 1-85Filtri di rete pag. 1-86 . . . . . 1-90Moduli e chopper di frenatura pag. 1-91 . . . . . 1-92Resistenze di frenatura pag. 1-93 . . . . . 1-94Fusibili, interruttori automatici e cavi pag. 1-95 . . . . . 1-96
Lenze Un programma completo che fa la differenza

Motori e Servomotori Sez. 2
Programma motori pagg. 2-1 . . . . . . 2-3
Motori asincroni trifase
Serie MDxMA (0,25 - 38,7 kW) Dati tecnici pagg. 2-4 . . . . . . 2-6Dimensioni pagg. 2-7 . . . . . . 2-11Carichi, sensori, freni, servoventilatori pagg. 2-12 . . . . . 2-13Collegamenti pag. 2-14
ServomotoriIntroduzione e panoramica del sistema pagg. 2-15 . . . . . 2-17Tabelle comparative di selezione pagg. 2-18 . . . . . 2-14
Serie MCS Servomotori sincroni (0,6 - 32 Nm) pagg. 2-25MCS 06 caratteristiche e dimensioni pagg. 2-26 . . . . . 2-29MCS 09 caratteristiche e dimensioni pagg. 2-30 . . . . . 2-33MCS 12 caratteristiche e dimensioni pagg. 2-34 . . . . . 2-37MCS 14 caratteristiche e dimensioni pagg. 2-38 . . . . . 2-41MCS 19 caratteristiche e dimensioni pagg. 2-42 . . . . . 2-45Morsettiera, collegamenti, cavi pagg. 2-46
Serie MCA Servomotori asincroni (2 - 55 Nm) pagg. 2-47MCA 10 e 13 caratteristiche e dimensioni pagg. 2-48 . . . . . 2-51MCA 14 caratteristiche e dimensioni pagg. 2-52 . . . . . 2-55MCA 17 caratteristiche e dimensioni pagg. 2-56 . . . . . 2-59MCA 19 caratteristiche e dimensioni pagg. 2-60 . . . . . 2-63MCA 21 caratteristiche e dimensioni pagg. 2-64 . . . . . 2-67Morsettiera, collegamenti, cavi pagg. 2-68
Serie MDFQA Servomotori asincroni a pacco lamellare (71 - 434 Nm) pagg. 2-69MDFQA 100 e 112 caratteristiche e dimensioni pagg. 2-70 . . . . . 2-73MDFQA 132 e 160 caratteristiche e dimensioni pagg. 2-74 . . . . . 2-78Morsettiera, cavi pagg. 2-79
Accessori per servomotoriEncoder e resolver pagg. 3-80Servoventilatore pagg. 3-81Cavi di sistema pagg. 3-82
Come ordinareServomotori sincroni MCS pagg. 3-83Servomotori asincroni MCA pagg. 3-84Servomotori asincroni MDFQA pagg. 3-85
MotoriduttoriPanoramica del sistema pagg. 2-87 . . . . . 2-85Motoriduttori G-motion const pagg. 2-86 . . . . . 2-87Motoriduttori G-motion atex pag. 2-88Motoriduttori G-motion motec pag. 2-89Motoriduttori G-motion servo pag. 2-90Motoriduttori G-motion EHB pag. 2-91

Automazione Sez. 3
Drive PLCCaratteristiche pagg. 3-3 . . . . . .2-5Dati tecnici pag. 3-6
I/O decentrabili
I/O modulari pagg. 3-7 . . . . . .3-10I/O compatti pag. 3-11Accessori pag. 3-12
Terminali operatoreDisplays e Touch screen pagg. 3-13 . . . . .3-15Software HMI Designer pag. 3-16
Moduli d'automazione per drives / PLC
Moduli di automazioneIl sistema pagg. 3-17 . . . . . 3-18Tastiere pag. 3-19
Moduli di comunicazione pag. 3-20Systembus CAN pag. 3-21ProfiBus-DP pag. 3-22InterBus-S pag. 3-23DeviceNet pag. 3-24Lecom A RS232 pag. 3-25Lecom B RS485 pag. 3-26Lecom LI pag. 3-27AS Interface pag. 3-28
Moduli I/OStandard I/O pag. 3-29Application I/O pag. 3-30Bus I/O pag. 3-31CAN I/O pag. 3-32ProfiBus I/O pag. 3-33
Telecontrollo
Introduzione pag. 3-35Modem CAN 2181 pagg. 3-36 . . . . .3-37EthernetCAN 2180 pagg. 3-38 . . . . .3-39OPC Drive Server pagg. 3-40 . . . . .3-43
Assistenza nel mondo
Lenze Un programma completo che fa la differenza

Lenze Assistenza nel mondo
Lenze AGPostfach 10 13 52D-31763 HamelnTelefon +49 (0)51 54/82-0Telefax +49 (0)51 54/82-28 00E-Mail: [email protected]: www.Lenze.com
Lenze Drive Systems GmbH
Postfach 10 13 52, D-31763 HamelnTelefon +49 (0)51 54 / 82-0Telefax +49 (0)51 54 / 82-28 00
Lenze GmbH & Co KG Anlagenbau
Buchenweg 1D-31855 AerzenTelefon +49 (0)51 54 / 82-0Telefax +49 (0)51 54 / 82-21 00
Lenze GmbH & Co KG Kleinantriebe
Hans-Lenze-Straße 1D-32699 ExtertalTelefon +49 (0)51 54 / 82-0Telefax +49 (0)51 54 / 82-14 85
Lenze Service GmbH
Breslauer Straße 3D-32699 Extertal
Mechanical DrivesTelefon +49 (0)51 54 / 82-16 26Telefax +49 (0)51 54 / 82-13 96
Electronic DrivesTelefon +49 (0)51 54 / 82-11 11Telefax +49 (0)51 54 / 82-11 12
Service Helpline +49 (0)180 5 20 24 26
Lenze Verbindungstechnik GmbH
Ipf-Landesstraße 1A-4481 ASTENPhone +43 (0)72 24 / 21 1-0Telefax +43 (0)72 24 / 21 19 98
Lenze DETO Drive Systems GmbH & Co KG
Gewerbepark Süd 11A-6330 KufsteinTelefon +43 (0)53 72 / 6 53 15-200Telefax +43 (0)53 72 / 6 53 15-299
LS Automation GmbH & Co KG
Jakob-Stadler-Platz 11D-78467 KonstanzTelefon +49 (0)75 31 /9 42 19-0Telefax +49 (0)75 31 /9 42 19 20
encoway GmbH
Universitätsallee 21-23D-28359 BremenTelefon +49 (0)4 21 /2 46 77-0Telefax +49 (0)4 21 /2 46 77-10
ALGERIA
see FRANCE
ARGENTINA *
E.R.H.S.A.Girardot 1368, 1427 BUENOS AIRESPhone +54 (0)11 / 45 54 32 32Telefax +54 (0)11 / 45 52 36 11
AUSTRALIA *
FCR Motion Technology Pty. Ltd.Unit 6, Automation Place38-40 Little Boundary Rd.LAVERTON NORTH, Vic. 3026 Phone +61 (3) 9362 6800 Telefax +61 (3) 9314 3744
AUSTRIA *
Lenze Antriebstechnik GmbHIpf-Landesstraße 14481 ASTENPhone +43 (0)7224 / 21 0-0Telefax +43 (0)7224 / 21 09 99
Office Dornbirn:Lustenauer Straße 646850 DORNBIRN Phone +43 (0)5572 / 26 789-0Telefax +43 (0)5572 / 26 789-66
Office Wr. Neudorf:Triester Straße 14/1092351 WR. NEUDORFPhone +43 (0)2236 / 2 53 33-0Telefax +43 (0)2236 / 2 53 33-66
Office Graz:Seering 88141 UNTERPREMSTÄTTENPhone +43 (0)3135 / 56 900-0Telefax +43 (0)3135 / 56 900 999
Lenze Verbindungstechnik GmbHIpf-Landesstraße 14481 ASTENPhone +43 (0)7224 / 21 1-0Telefax +43 (0)7224 / 21 19 98
Lenze Anlagentechnik GmbHMühlenstraße 34470 ENNSPhone +43 (0)7223 / 886-0Telefax +43 (0)7223 / 886-997 BELGIUM*
Lenze b.v.b.aNoorderlaan 133bus 152030 ANTWERPENPhone +32 (0)3 / 54 26 20 0Telefax +32 (0)3 / 54 13 75 4
BOSNIA-HERZEGOVINA
see AUSTRIA
BRAZIL *
AC Control LtdaRua Gustavo da Silveira 1199 Vila Sta. CatarinaSÃO PAULO – S.P.04376-000Phone +55 (11) 55 64 65 79 ramal: 214Telefax +55 (11) 56 79 75 10
BULGARIA
see MACEDONIA
CANADA *
see USA
CHILE
Sargent S.A.Tecnica Thomas C. SargentS.A.C.é.l.Casilla 166-DSANTIAGO DE CHILEPhone +56 (0)2 / 51 03 000Telefax +56 (0)2 / 69 83 989
CHINA *
Lenze Mechatronic Drives (Shanghai) Co. Ltd., Section B, 50# building,No.199 North Ri Ying Road,Waigaoqiao Free Trade ZoneSHANGHAI, 200131Phone +86-21-5046 0848Telefax +86-21-5046 0850
Beijing OfficeRm. 401, Huaxin MansionNo. 33 An Ding RoadChaoyang District BEIJING 100029Phone +86-10-6441 1470Telefax +86-10-6441 1467
CROATIA
Lenze Antriebstechnik GmbHPredstavnista ZagrebUlica Grada Gospica 3HR-1000 ZAGREBPhone +385-1-2 49 80 56Telefax +385-1-2 49 80 57
CZECH REPUBLIC
Lenze, s.r.o.Central Trade Park D1396 01 HUMPOLECPhone +420 565 507-111Telefax +420 565 507-399
Büro âerven˘ Kostelec:17. listopadu 510 549 41 âERVEN¯ KOSTELECPhone +420 491 467-111Telefax +420 491 467-166
DENMARK *
Lenze A/SVallensbækvej 18A2605 BRØNDBYPhone +45 / 46 96 66 66Telefax +45 / 46 96 66 6024 stunde service +45 / 40 93 04 11
Buero Jylland:Lenze A/SLanghøjvej 18381 TILSTPhone +45 / 46 96 66 66Telefax +45 / 46 96 66 80
EGYPT
WADI Co. for technologies and developmentP.O.Box 209, new center Ramses11794 CAIRO, Egypt11 Syria St., MohandessinGIZA, EgyptPhone +20 (2) 347 6842Telefax +20 (2) 347 6843
ESTONIA
see FINLAND
FINLAND *
Lenze DrivesRykmentintie 2 b20810 TURKUPhone +358 2 2748 180Telefax +358 2 2748 189
FRANCE *
Lenze S.A.SiegeZ.A. de ChanteloupRue Albert Einstein93603 AULNAY-SOUS-BOIS CEDEX
Services CommerciauxTel. 0 825 086 036Fax 0 825 086 346
Centre de formationE-Mail : [email protected]
Questions générales / DocumentationE-Mail : [email protected]
Service Après-vente / assistance en ligneHelpline 24/24 : 0 825 826 117 E-Mail : [email protected]
Agences en FranceRégion France Nord :Z.A. de ChanteloupRue Albert Einstein93603 AULNAY-SOUS-BOIS CEDEX
Lille59420 MOUVAUX
Strasbourg67960 ENTZHEIM
Rouen76500 ELBEUF
Région France Sud :Rond point du sans souci69578 LIMONEST Cedex
Toulouse31400 TOULOUSE
Agen47270 SAINT-PIERRE DE CLAIRAC
GERMANY
Lenze Vetrieb GmbH
Ludwig-Erhard-Straße 52-56D-72760 ReutlingenTelefon +49 (0)71 21 / 9 39 39-0Telefax +49 (0)71 21 / 9 39 39-29
Region NordDornenpark 131840 Hessisch OldendorfTelefon (0 51 52) 90 36-0Telefax (0 51 52) 90 36-33/44/55
Region WestPostfach 10 12 2047497 Neukirchen-VluynKelvinstraße 747506 Neukirchen-VluynTelefon (0 28 45) 95 93-0Telefax (0 28 45) 95 93 93
Region Mitte/OstPostfach 146335724 HerbornAustraße 8135745 HerbornTelefon (0 27 72) 95 94-0Telefax (0 27 72) 5 30 79
Region SüdwestPostfach 14 3371304 WaiblingenSchänzle 871332 WaiblingenTelefon (0 71 51) 9 59 81 - 0Telefax (0 71 51) 9 59 81 50
Region SüdFraunhoferstraße 1682152 MartinsriedTelefon (0 89) 89 56 14-0Telefax (0 89) 89 56 14 14
GREECE
George P. Alexandris S.A.12K. Mavromichali Str.185 45 PIRAEUSPhone +30 (0)210 / 41 11 84 15Telefax +30 (0)210 / 4 11 81 71
4 12 70 58183 Monastiriou Str. 546 27 THESSALONIKIPhone +30 (0)310 / 5 56 65 04Telefax +30 (0)310 / 51 18 15
HUNGARY *
Lenze AntriebstechnikHandelsgesellschaft mbH2040 BUDAÖRSGyár utca 2., P.O.Box 322.Phone +36 (0)23 / 501-320Telefax +36 (0)23 / 501-339
ICELAND
see DENMARK
INDIA
Electronic Service:National Power Systems,10, Saibaba Shopping CentreKeshav Rao Kadam Marg,Off Lamington Rd,MUMBAI 400 008Phone +91 22 / 2300 5667, 2301 3712 Telefax +91 22 / 2300 5668
V3 Controls Pvt. Ltd.1, “Devyani”, Next to SBI, Baner ITI Road,Sanewadi, Aundh,PUNE 411 007, MSPhone +91 20 / 25 88 68 62Telefax +91 20 / 25 88 03 50
Mechanical Service:Emco Lenze Pvt. Ltd.1st Floor, Sita MauliMadanlal Dhingra RoadPanch Pakhadi, Thane (West)MAHARASHATRA 400 602Phone +91 22 / 25 40 54 88
+91 22 / 25 45 22 44Telefax +91 22 / 25 45 22 33

Panoramica Drives, motori, automazione
Pannelli operatore Drive PLC Servoinverter 9300
Inverter9300 vector
Invertersmd
Inverter8200 vector
Inverter on board
8200 motec
Avviatore on boardstarttec
Servoinverter ECS per applicazioni multiasse
Moduli di comunicazione
Software di configurazione
Software applicativi
Tastiere XT Moduli d’automazione
Riduttori, Motoriduttori e Motori
Componenti e Freni
IP20 I/O system
INDONESIA
P.T. Futurindo GlobalsatyaJl.: Prof. Dr. Latumenten No. 18Kompleks PerkantoranKota Grogol Permai Blok A 35JAKARTA 11460Buero 1:Phone +62 (0)21 / 766 42 34
765 86 23Telefax +62 (0)21 / 766 44 20Buero 2:Phone +62 (0)21 / 567 96 31
567 96 32Telefax +62 (0)21 / 566 87 50
IRAN
Tavan Ressan Co. Ltd.P.O.Box. 19395-5177No. 44, Habibi St.,South Dastour St.,Sadr EXP’Way,TEHRAN 19396Phone +98 21 / 260 26 55
260 67 66260 92 99
Telefax +98 21 / 200 28 83
ISRAEL *
Greenshpon Engineering Works LTDBar-Lev Industrial ParkMISGAV 20179Phone +972 4 99 13 18 1Telefax +972 4 99 13 47 7
ITALY *
Gerit Trasmissioni S.p.A.Viale Monza 33820128 MILANOPhone +39 02 / 270 98.1Telefax +39 02 / 270 98 290
JAPAN *
Miki Pulley Co., Ltd.1-39-7 Komatsubara, Zama-cityKANAGAWA 228-8577Phone +81 (0)462 / 58 16 61Telefax +81 (0)462 / 58 17 04
LATVIA
see LITHUANIA
LITHUANIA
Lenze UABBreslaujos g.344403 KAUNASPhone +370 37 407174Telefax +370 37 407175
LUXEMBOURG *
see BELGIUM
MACEDONIA
Lenze Antriebstechnik GmbHPretstavnistvo Skopjeul. Nikola Rusinski 3/A/21000 SKOPJEPhone +389 2 30 90 090Telefax +389 2 30 90 091
MALAYSIA
D.S.C. Engineering SDN BHD3A & 3B, Jalan SS21/56BDamansara Utama47400, PETALING JAYA, SELANGOR Phone +60 (0)3 / 77 25 62 43
77 25 62 4677 28 65 30
Telefax +60 (0)3 / 77 29 50 31
Lenze S.E.A. Sdn BhdDamansara Technology ParkNo. 28, Jalan PJU 3/4747810, PETALING JAYA, SELANGOR
MAURITIUS
Automation & Controls Engineering Ltd3, Royal Road, Le Hochet, Terre RougeMAURITIUSPhone +230 248 8211Telefax +230 248 8968
MEXICO
Automatización y Control de Energía S.A. de C.V.Av. 2 No. 89 Esq Calle 13Col. San Pedro de los PinosC.P. 03800 MEXICO D.F.Phone +52 (55)5277/5998Telefax +52 (55)5277/5937
MOROCCO
GUORFET G.T.D.R Automatisation IndustrielleBd Chefchaouni Route 110 km, 11.500No. 353-Aîn-SabaâCASABLANCAPhone +212/22-35 70 78Telefax +212/22-35 71 04
NETHERLANDS *
Lenze B.V., Postbus 31 015203 DC`S-HERTOGENBOSCHPloegweg 155232 BR`S-HERTOGENBOSCHPhone +31 (0)73 / 64 56 50 0Telefax +31 (0)73 / 64 56 51 0
NEW ZEALAND *
Tranz Corporation343 Church StreetP.O. Box 12-320, PenroseAUCKLANDPhone +64 (0)9 / 63 45 51 1Telefax +64 (0)9 / 63 45 51 8
NORWAY *
Dtc- Lenze asStallbakken 5, 2005 RAELINGENPhone +47 / 64 80 25 10Telefax +47 / 64 80 25 11
PHILIPPINES
Jupp & Company Inc.Unit 224 Cityland Pioneer Bldg.,Pioneer StreetMANDALUYONG CITYPhone +63 2 / 687 7423
683 0042683 0047
Telefax +63 2 / 687 7421
POLAND
Lenze-Rotiw Sp. z o.o.ul. Ro˝dzieƒskiego 188b40-203 KATOWICEPhone +48 (0)32 / 2 03 97 73Telefax +48 (0)32 / 7 81 01 80
Lenze Systemy Automatyki Sp. z o.o.Ul. Rydygiera 4787-100 TORU¡Phone +48 (0)56 / 6 58 28 00
6 45 34 606 45 35 70
Telefax +48 (0)56 / 6 45 33 56
PORTUGAL *
Costa Leal el VictorElectronica-Pneumatica, Lda.Rua Prof. Augusto Lessa, 269,Apart. 520534202-801 PORTOPhone +351-22 / 5 50 85 20Telefax +351-22 / 5 02 40 05
ROMANIA
see AUSTRIA
RUSSIA
Inteldrive1-st Buhvostova Street 12/11Korpus 18 Office 213MOSCOW 107258Phone +7 (0) 095 / 748 78 27Telefax +7 (0) 095 / 963 96 86
SERBIA-MONTENEGRO
see MACEDONIA
SINGAPORE *
see MALAYSIA
SLOVAC REPUBLIC
ECS Sluzby spol. s.r.o.Staromlynska 2982106 BRATISLAVAPhone +421 2 45 25 96 06
+421 2 45 64 31 47+421 2 45 64 31 48
Telefax +421 2 45 25 96 06
SLOVENIA
Lenze pogonska tehnika GmbHZbiljska Cesta 41215 MEDVODEPhone +386 (0)1 361 61 41Telefax +386 (0)1 361 22 88
SOUTH AFRICA *
S.A. Power Services (Pty.) Ltd.Unit 14, Meadowbrook Business EstatesJacaranda Ave, OlivedaleRandburg 2158P.O.Box 1137RANDBURG 2125Phone +27(11) 462-8810Telefax +27(11) 704-5775
SOUTH KOREA *
Hankuk Mechatro Ltd.Room# 1409 Samhwan officetel 830-295Beomil-dong, Dong-GuPUSANPhone +82 (0)51-635-6663Telefax +82 (0)51-635-6632
SPAIN *
Lenze Transmisiones, S.A. (Headquarter)Milà i Fontanals, 135-13908205 SABADELLBarcelona Phone +34 937 207 680Telefax +34 937 120 215
Lenze Delegación BilbaoP.I. Ibarrabarri. Ed. METRO 2º-E48940 LEJONAVizcayaPhone +34 944 630 510/ 507Telefax +34 944 314 196
Lenze Delegación LevanteCullera, 73 – 4ºD46035 BENIMAMET ValenciaPhone +34 963 905 220/335Telefax +34 963 900 647
Lenze Delegación MadridArturo Soria, 187 – Of. 828043 MADRID Phone +34 915 103 341Telefax +34 915 102 061
SWEDEN *
Lenze Transmissioner ABP.O.Box 10 74, Attorpsgatan, Tornby Ind.58110 LINKÖPINGPhone +46 (0)13 / 35 58 00Telefax +46 (0)13 / 10 36 23
SWITZERLAND *
Lenze Bachofen AGAckerstrasse 458610 USTERPhone +41 (0) 43 399 14 14Telefax +41 (0) 43 399 14 24
Vente Suisse Romande:Route de Prilly 251023 CRISSIERPhone +41 (0)21 / 63 72 19 0Telefax +41 (0)21 / 63 72 19 9
SYRIA
Zahabi Co.8/5 Shouhadaa StreetP.O.Box 8262ALEPPO-SYRIAPhone +963 21 21 22 23 5Telefax +963 21 21 22 23 7
TAIWAN *
ACE Pillar Co. Ltd.No.12, Lane 61, Sec. 1, Kuanfu RoadSan-Chung CityTAIPEI HSIENPhone +886 (0)2 / 299 58 40 0Telefax +886 (0)2 / 299 53 46 6
THAILAND
PackSys Global (Thailand) Ltd.429 Moo 7Theparak Road, Tambol TheparakAmphur MuangSAMUTPRAKARN 10270Phone +66 2 383 5633Telefax +66 2 383 5637
TUNESIA
AMF Industrielle SarlRoute de Gremda - Km 0,2Immeuble El Madina,Centre Bloc B - 5 ème - appt 523002 SFAXPhone +216 74 403 514Telefax +216 74 402 516
TURKEY
LSE Elektrik Elektronik MakinaOtomasyon Mühendislik San. Ve Tic. Ltd. Sti.Atatürk mah. Cumhuriyet cad.Yurt sok. No:7ÜMRANIYE/ISTANBULPhone +90 (0)216 / 316 5138 pbxTelefax +90 (0)216 / 443 4277
Bursa Address:Demirtaspasa Mh.Ata Sk. Petek Bozkaya Is MerkeziD Blok No :5 / A OSMANGAZI / BURSAPhone +90 (0)224-2733232 pbx
+90 (0)224-2734151+90 (0)224-2733238
Telefax +90 (0)224-2734150
UKRAINE
SV Altera, Ltd.Lepse ave., 4 KIEV, 03067Phone +38 044 496 18 88Telefax +38 044 496 18-18
UNITED ARAB EMIRATES
LPT (FZC)Executive Suite X4-37P.O. Box: 9304, SAIF ZONESHARJAH AIRPORT INTERNATIONALFREE ZONE (SAIF ZONE)Phone +971 6 5573205Telefax +971 6 5573206
UNITED KINGDOM/EIRE *
Lenze Ltd.Caxton RoadBEDFORD MK 41 OHTPhone +44 (0)1234 / 32 13 21Telefax +44 (0)1234 / 26 18 15
USA *
AC Technology Corp.630 Douglas StreetUXBRIDGE, MA 01569Phone +1 508 / 278-9100Telefax +1 508 / 278-7873
Lenze Corporation1730 East Logan AvenueEMPORIA, KS 66 801 Phone +1 620 / 343-8401
+1 888 / 269-2381Telefax +1 620 / 342-2595
+1 800 / 469-0931
Lenze DETO Drive Systems USA, LLC5912 Sterling DriveHOWELL, MI 48843 Phone +1 517 / 586-4057Telefax +1 517 / 586-4058
œ* Countries connected to the free expert helpline 008000 24 hours (008000 24 46877)

Drives, motori, automazione
La soddisfazione per i nostri prodotti e servizi nei
più disparati settori industriali è il nostro orgoglio.
Cat
alog
o: D
rive
s, m
otor
i, au
tom
azio
ne
· Con
ten
uto
sog
gett
o a
mod
ific
he
· Ed
izio
ne
10/2
006
5k
“I nostri Clienti vengono prima di tutto. La loro soddisfazione è la nostra
motivazione. Pensare in termini di vantaggi per il Cliente significa aumen-
tare la nostra produttività grazie all’affidabilità dei nostri prodotti.”
“Da noi riceverete esattamente ciò di cui avete bisogno: prodotti e soluzio-
ni in perfetta sinergia e con le funzioni richieste per le vostre macchine e i
vostri impianti. Questo è ciò che intendiamo per qualità.”
“Fate leva sul nostro know-how, maturato in oltre 50 anni di esperienza in
vari settori e tradotto coerentemente in prodotti innovativi, in funzioni di
motori e azionamento all'avanguardia e in soluzioni chiavi in mano per
applicazioni specifiche .”
“Facciamo nostri i vostri obiettivi e puntiamo a raggiungere una partner-
ship di lunga durata, vantaggiosa per entrambe le parti. Potrete contare su
servizi competenti per realizzare le vostre esigenze. Siamo sempre a vostra
disposizione per offrirvi il nostro supporto in tutti i processi chiave.”
Lenze Gerit S.r.l.
Sede di Milano: Viale Monza, 338 · 20128 Milano
Telefono +39 02 270 98.1 · Telefax: +39 02 270 98 290
Filiale di Bologna: via del Sostegno, 26/A · 40131 Bologna
Telefono +39 051 63 50 511 · Telefax: +39 051 63 48 640
Helpline internazionale 24h: numero verde 008000 2446877
“Il mondo è il nostro mercato. Progettiamo e produciamo a livello
internazionale per essere vicini a voi, ovunque voi siate nel mondo.”
www.lenzegerit.it
Dri
ves,
mo
tori
, au
tom
azio
ne
Lenze Solution partner
Lenze è il partner competente per le vostre
applicazioni. Lenze non fornisce solo compo-
nenti, ma offre soluzioni complete di azio-
namento ed automazione.
In aggiunta, grazie alla propria rete mon-
diale, voi ed i vostri clienti, potrete contare
su una qualificata ed efficiente assistenza
pre e post vendita.
Il nostro sistema di qualità certifica la
progettazione, la produzione, la vendita e
l’assistenza dei nostri prodotti in conformità
alle normative DIN ISO 9001 : 2000.
Il nostro sistema per la tutela dell’ambiente
è anch’esso certificato secondo DIN EN ISO
14001.
La soddisfazione dei nostri clienti costi-
tuisce la miglior verifica della qualità dei
nostri prodotti.
La nostra missione è di rispondere alle
vostre esigenze, offrendo le soluzioni miglio-
ri, più tecnologiche e competitive.
Verificate personalmente.
Buono a sapersi perché siamo qui per voi
Sistema completo, performante, unico

Drives
1
1-1Drives, motori, automazione 10/2006
Programma drives
Nell’ampia gamma di drive Lenze potrete trovare la soluzioneottimaleper la vostra applicazione.
I drive Lenze assicurano una perfetta integrazione nelsistema di automazione e di comunicazione del progetto. Laloro completa scalarità e modularità migliorano la flessibilità,e facilitano la configurazione garantendo interessanti vataggieconomici.
Gli strumenti software dedicati semplificano laparametrizzazione ed abbattono i tempi per la messa infunzione dei moduli macchina.
I drive Lenze semplificano la progettazione anche dellemacchine dedicate agli ambienti più ostili. Le versioni IP65,studiate per l’installazione a bordo motore o a bordo
Lenze: la risposta che stavate cercando
macchina, semplificano la realizzazione di moduli macchinaindipendenti. Le versioni cold plate e push throughtaumentano la flessibilità dei modelli dedicati all’installazionenel quadro elettrico.
Potenze fino a 400 kW, la possibilità di gestire I/O di processoin modo trasparente e la capacità di realizzare applicazionidirettamente nel drive ampliano notevolmente il campod’impiego.
Sono inoltre disponibili versioni dedicate ad applicazioniHVAC (per pompe e ventilatori) per potenze fino a 1000 kW.

DrivesProgramma prodotti
1
1-2 Drives, motori, automazione 10/2006
Azionamenti decentrati Inve
starttec 8200 motec 930 fluxxtorque smd tmd
� = Standard� = Opzionale� = Variante
Campo di tensione e di potenza 3 x 100 ... 550 V: 1 x 180 ... 264 V: 1 x 230 V: 1 x 180 ... 264 V: 1 x 180 ... 264 V:0,25 ... 4,0 kW 0,25 ... 0,37 kW. 0,25 ... 0,5 kW. 0,18 ... 2,2 kW. 0,18 ... 2,2 kW.
3 x 320 ... 550 V: 24 oppure 48 VDC: 3 x 320 ... 528 V: 3 x 320 ... 528 V:0,55 ... 7,5 kW 0,14 ... 0,17 kW 0,37 ... 22 kW 0,37 ... 7,5 kW
Omologazioni CE, UL508C, cUL CE, UL508C, cUL CE CE, UL508C, cUL CE, UL508C, cUL
Tipi di rete ammissibili TT, TN TN, TT TN, TT TN, TT
Frequenza di commutazione 2, 4, 8, 16 kHz 10 kHz 4, 6, 8, 10 kHz 4, 6, 8, 10 kHz
Costruzione meccanicaUnità stand alone � �Push throughCold PlateBase di fissaggioMontaggio su motore � � �Montaggio a parete � � �
Livello di protezione IP65 IP65 IP54 IP20 IP20
Funzionamento da generatoreTransistor di frenatura integrato � �Chopper di frenatura esterno � �Ricircolo in rete
Tipo di regolazione Regolazione delleV/f rampe di � � �Vettoriale (sensorless) avviamento � �Servoregolazione e fermata �
Funzionalità di azionamentoControllo di frequenza � � �Controllo di coppia � � �Controllo di velocità � � �PID � � � �Motion Control �
ProgrammabilitàParametrizzazione � � � � �Configurazione di blocchi funzioneProgrammazione IEC 61131-3
Ingressi/usciteI/O analogici 1 / 1 oppure 2 / 2 1 / 1 2 / 1I/O digitali 5 / 1 oppure 7 / 3 1 / 1 4 / 1 4 / 2Uscite a relè 1 1 1Retroazione di velocità �Encoder simulatoPTC e/o KTY � � �Software I x t � � � �
Bus di campoCAN-Bus � � � �PROFIBUS � � �INTERBUS � �Modbus � �LECOM � � � �AS Interface � �Device Net � � �Ethernet TCP / IPETHERNET Powerlink
Funzioni di sicurezzaScollegamento sicuro del motore
Supporto diagnosticaLEDs � �Tastiera integrata � �Tastiera removibile � � � �Interfaccia PC � � � �Modulo memoria � �
Strumenti software Global Drive Control Global Drive Control fluxx Global Drive Control Tech-Link

DrivesProgramma prodotti
1
1-3Drives, motori, automazione 10/2006
erter Servoinverter
8200 vector 9300 vector 930 ECS 9300 Servo 9400 Servo 94/940
1 x 180 ... 264 V: 3 x 320 ... 528 V: 24 ... 48 VDC: 3 x 180 ... 528 V: 3 x 320 ... 528 V: 3 x 180 ... 550 V: 1 x 200 ... 240 V:0,25 ... 2,2 kW. 0,37 ... 90 kW. 0,6 kW 1,1 ... 13,8 kW 0,37 ... 75 kW. 0,37 ... 30 kW. 0,25 ... 2,2 kW.
3 x 100 ... 264 V: 3 x 340 ... 456 V: 460 ... 740 VDC: 260 ... 775 VDC: 3 x 400 ... 480 V:0,55 ... 7,5 kW. 110 ... 400 kW. 0,37 ... 75 kW 0,37 ... 30 kW 0,50 ... 2,2 kW
3 x 320 ... 550 V: 3 x 340 ... 577 V:0,55 ... 90 kW 132 ... 500 kW
CE, UL508C, cUL CE, UL508C, cUL CE CE, UL508C, cUL CE, UL508C, cUL CE, UL508C, cUL CE, UL508C, cUL
TT, TN, (Variante IT- TT, TN, (Variante IT TT, TN, IT TT, TN, IT TT, TN, IT TT, TNda 15 kW) fino a 90 kW)
2, 4, 8, 16 kHz 1, 2, 4, 8, 16 kHz 10 / 20 kHz 4, 8 kHz 8, 16 kHz 1, 2, 4, 8, 16 kHz 8, 16 kHz
� � � � � � �� � (fino a 90 kW) � �
� (fino a 22 kW) � (fino a 22 kW) � � (fino a 22 kW)�
IP20 IP20 IP20 IP20 IP20 IP20 IP20
� (fino a 11 kW) � � � �� (da 15 kW) � �
� � � �
� � �� � �
� � � � � �
� � �� � � � � � �� � � � � � �� � � � � �
� � � � � (940)
� � � � � � �� � �
� � �
1 / 1 oppure 2 / 2 2 / 2 2 / 2 1 / - 2 / 2 2 / 2 1 / 15 / 1 oppure 7 / 3 7 / 4 6 / 2 4 / 1 6 / 4 9 / 4 2 / 2 oppure 14 / 5
1 (2 > 11 kW) 12 2 2 3 2 (3 �) 1 (2 �)1 1 1 1 �
� � � � � � �� � � � � �
� � � � � � �� � � � �� � � �
� � � ��� � � � �
� � (940)�
� (da 3 kW) � � � �
� � � � � �� � � � � �� � � � �� � � � � � �
� �
Global Drive Control Global Drive Control Small Drives Control GDC, DDS GDC, DDS L-force Engineer Motionview

DrivesInverter smd
1
1-4 Drives, motori, automazione 10/2006

DrivesInverter smd
1
1-5Drives, motori, automazione 10/2006
Inverter smd 0,25...22 kW
Senza compromessiQuando le esigenze applicative richiedono grandi prestazioni,ampie funzionalità – come ad esempio ingressi analogici,velocità preselezionabili ed il tastierino integrato – e lo spaziodisponibile è limitato, non è possibile accettare alcun compro-messo. Il nuovo inverter Lenze 8200 smd (smart micro drive) èstato realizzato per raggiungere tutti questi obiettivi ed offri-re una risposta molto vantaggiosa alla crescente domandad'azionamenti per applicazioni standard. Per la sua elevatacompattezza e le sue prestazioni, questo inverter è un verocampione nella sua categoria.
Versatilità unicaCon una potenza in uscita da 0,25 a 5,5 kW, un ampio campodi tensioni d’alimentazione da 180 a 480 V, versioni monofaseo trifase e un’ampia offerta di accessori opzionali, gli inverter8200 smd offrono la massima capacità d’integrazione in ogniapplicazione. Essi sono un raro esempio di come la tecnologiapossa essere al sevizio degli utilizzatori: grande semplicità d’u-so, massimo rapporto qualità/prezzo e affidabilità Lenze. Già dal primo impatto è possibile apprezzare il valore ed i van-taggi di questo prodotto. Non solo il prezzo è competitivo, maanche i tempi ridotti di messa in servizio e la facilità operativacostituiscono un, ulteriore, concreto risparmio.
Cosa offre?˘ una circuitazione affidabile ed efficiente˘ rapida messa in servizio˘ protezione IP20˘ inversioni, accelerazioni e decelerazioni controllate˘ ingressi digitali liberamente configurabili˘ riferimento velocità 0 – 10 V, 4 – 20 mA˘ uscita a relé ˘ funzione motopotenziometro˘ velocità preselezionabili˘ protezione contro il sovraccarico del motore˘ chip di memoria EPM˘ ampia gamma di accessori˘ filtro RFI integrato nei modelli monofase˘ comunicazione seriale RS485 / ModBus per le versioni
trifase 400/480 V˘ versione con CANopen integrata (a richiesta)
Compatto, semplice, affidabile.
Il partner giusto per
applicazioni universali
DrivesInverter smd
1
1-6 Drives, motori, automazione 10/2006
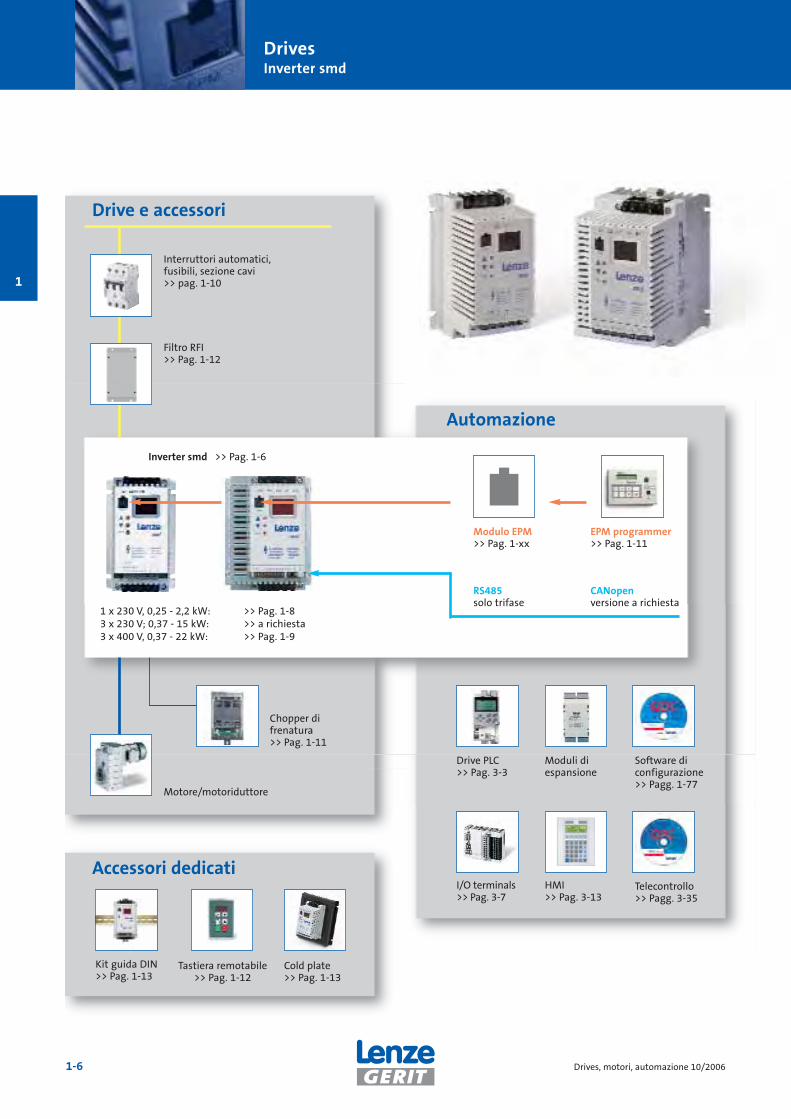
Automazione
Kit guida DIN>> Pag. 1-13
Cold plate>> Pag. 1-13
Tastiera remotabile>> Pag. 1-12
Accessori dedicati
Chopper difrenatura>> Pag. 1-11
Motore/motoriduttore
Inverter smd >> Pag. 1-6
Modulo EPM >> Pag. 1-xx
EPM programmer>> Pag. 1-11
RS485 solo trifase
CANopenversione a richiesta
1 x 230 V, 0,25 - 2,2 kW: >> Pag. 1-83 x 230 V; 0,37 - 15 kW: >> a richiesta3 x 400 V, 0,37 - 22 kW: >> Pag. 1-9
Interruttori automatici,fusibili, sezione cavi >> pag. 1-10
Filtro RFI>> Pag. 1-12
Drive PLC>> Pag. 3-3
I/O terminals>> Pag. 3-7
HMI>> Pag. 3-13
Moduli diespansione
Software di configurazione>> Pagg. 1-77
Telecontrollo>> Pagg. 3-35
Drive e accessori

DrivesInverter smd
1
1-7Drives, motori, automazione 10/2006
Caratteristiche
Coppia di spunto 150% x INom (60 s)
Frequenza di chopper a scelta 4, 6, 8, 10 kHz
Protezione IP20 (EN 60529)
Immunità alle vibrazioni fino a 0,7 g
Classe immunità EMC Secondo EN 61800-3/A11
Emissione disturbi EN 55011 modelli monofase: filtro classe A integrato *
modelli trifase: con filtro opzionale da installare sotto l’inverter
Lunghezza massima cavi motore schermati: 50 m (cavi a bassa capacità)
non schermati: 100 m
Condizioni ambientali Umidità classe F (umidità relativa < 85% senza condensa)
Temperatura ambiente funzionamento: 0...+ 55 °C (> 40°C con riduzione di potenza)trasporto: –25...+ 70 °Cstoccaggio: –20...+ 70 °C
Altitudine sul livello del mare: 0... 4000 m (> 1000 m con riduzione di potenza)
Riduzione di potenza > 40° ~ ≥ 55°C: riduzione del 2,5% ogni 1°K> 1000 ~ ≤ 4000 m (s.l.m.): riduzione del 5% ogni 1000 m
Tipo di regolazione caratteristica V/f, lineare, quadratica per pompe / ventilatori, auto-boost
Frequenza in uscita 0 ... 240 Hz (fino a 1000 HZ a richiesta)
Funzioni MotopotenziometroVariazione della velocità tramite tasti AUM. / DIM. sulla tastieraFrenatura in c.c. (DCB), protezione I2 x t del motore3 velocità JOGReset guasti tramite segnale d'ingresso o automaticamente (con ritardo impostabile)Funzioni di diagnostica e visualizzazione (contatore tempo in funzione e dall’accensione)Memoria cronologica guastiLimitazione di correnteProtezioni: – cortocircuito
– dispersione a terra– sovratensione– stallo motore– sovraccarico motore
Clonazione parametri tramite EPM Programmer, opzionale
Comunicazione Seriale RS485: per modelli trifase 400/480 V (tutti) e trifase 230 V ( da 5,5 a 15 kW)Versione con CANopen integrato (a richiesta)
Certificazioni CE, UL, cUL
Ingressi liberamente programmabili digitali 3 (più un ingresso fisso per Start / Stop)analogico 1 (0- 5V, 0-10V; 0-20mA / 4-20mA)
Uscita relè (configurabile) Relé (normalmente aperto) 250 VCA / 3 A; 24 VCC / 2 A...240 VCC / 0,22 A
* Con cavo motore di lunghezza ≤ 2 m, il filtro integrato è conforme alle normative EN 55011, classe B.

DrivesInverter smd
1
1-8 Drives, motori, automazione 10/2006
Inverter smd tipo ESMD 251X2SFA 371X2SFA 551X2SFA 751X2SFA 152X2SFA 222X2SFA
Potenza motore PN [kW] 0,25 0,37 0,55 0,75 1,5 2,2
Tensione d’alimentazione Vrete [V] Monofase 180V...264V; 48 Hz...62 Hz (±0%)
Corrente nom. assorbita INrete [A] 3,4 5,0 6,0 9,0 15,0 18,0
Corrente nom. 4, 6, 8 kHz IN8kHz [A] 1,7 2,4 3,0 4,0 7,0 9,5in uscita
10 kHz IN10kHz [A] 1,6 2,2 2,8 3,7 6,4 8,7
Corrente max 4, 6, 8 kHz Imax8kHz [A] 2,6 3,6 4,5 6,0 10,5 14,3per 60 s
10 kHz Imax10kHz [A] 2,4 3,3 4,2 5,5 9,6 13,1
Dimensioni a x b x c [mm] 93 x 146 x 83 93 x 146 x 92 114 x 146 x 124 114 x 146 x 140
Peso [kg] 0,5 0,5 0,6 0,6 1,2 1,4
Dati tecnici versioni monofase con alimentazione 230 V
0 ... 20 mA4 ... 20 mA
1k ... 10k
+_
7 28 E1 E2 E3
+12 ... 30 VDC ±0 %
PE PEU V W
PEL1 L2/N
PE
PEPES
M3~
smd
8 9 20 28 E1 E2 E3 K14K12
+10V
+12V
CO
M
AIN
7
PENL3L2L1
1/N/PE 180 ... 264 V 0 %48 Hz ... 62 Hz
87
250
PES
PES
PES
Collegamenti 1 x 230 VDimensioni
a
b
c

DrivesInverter smd
1
1-9Drives, motori, automazione 10/2006
Inverter smd tipo ESMD 402L4TXA 552L4TXA 752L4TXA 113L4TXA 153L4TXA 183L4TXA 223L4TXA
Potenza motore PN [kW] 4,0 5,5 7,5 11 15 18,5 22
Tensione d’alimentazione VN [V] Trifase 400V...480V; 48 Hz...62 Hz (±0%)
Dati per alimentazione a Vrete [V] 400 480 400 480 400 480 400 480 400 480 400 480 400 480
Corrente nom. assorbita IN [A] 10,6 8,8 14,2 12,4 18,1 15,8 27 24 35 31 44 38 52 45
Corrente nom. 4, 6, 8 kHz IN8kHz [A] 9,4 7,8 12,6 11,0 16,1 14,0 24 21 31 37 29 34 46 40in uscita
10 kHz IN10kHz [A] 8,6 7,2 11,6 10,1 14,8 12,9 22 19,3 29 25 26 31 42 37
Corrente max 4, 6, 8 kHz Imax8kHz [A] 14,1 11,7 18,9 16,5 24 21 36 32 47 41 59 51 69 60per 60 s
10 kHz Imax10kHz [A] 12,9 10,8 17,4 15,2 22 19,4 34 29 43 37 54 47 64 55
Dimensioni senza filtro a x b x c [mm] 114 x 146 x 171 146 x 197 x 182 195 x 248 x 203
Dimensioni con filtro d x e x f [mm] 118 x 175 x 214 150 x 226 x 225 198 x 280 x 246
Peso inverter / filtro [kg] 1,8 / 0,7 3,2 / 1,3 6,4 / 2,2
Dati tecnici versioni trifase con alimentazione 400 ... 480 V
Inverter smd tipo ESMD 371L4TXA 751L4TXA 112L4TXA 152L4TXA 222L4TXA 302L4TXA
Potenza motore PN [kW] 0,37 0,75 1,1 1,5 2,2 3,0
Tensione d’alimentazione Vrete [V] Trifase 400V...480V; 48 Hz...62 Hz (±0%)
Dati per alimentazione a VNrete [V] 400 480 400 480 400 480 400 480 400 480 400 480
Corrente nom. assorbita INrete [A] 1,6 1,4 3,0 2,5 4,3 3,6 4,8 4,0 6,4 5,4 8,3 7,0
Corrente nom. 4, 6, 8 kHz IN8kHz [A] 1,3 1,1 2,5 2,1 3,6 3,0 4,1 3,4 5,8 4,8 7,6 6,3in uscita
10 kHz IN10kHz [A] 1,2 1,0 2,3 1,9 3,3 2,8 3,8 3,1 5,3 4,4 7,0 5,8
Corrente max 4, 6, 8 kHz Imax8kHz [A] 2,0 1,7 3,8 3,2 5,4 4,5 6,2 5,1 8,7 7,2 11,4 9,5per 60 s
10 kHz Imax10kHz [A] 1,8 1,5 3,5 2,9 5,0 4,2 5,7 4,7 8,0 6,6 10,5 8,7
Dimensioni senza filtro a x b x c [mm] 93 x 146 x 100 93 x 146 x 120 93 x 146 x 146 114 x 146 x 133 114 x 146 x 171
Dimensioni con filtro d x e x f [mm] 95 x 175 x 126 118x 175 x 135 95 x 175 x 184 118 x 175 x 184 118 x 175 x 214
Peso inverter / filtro [kg] 0,5 / 0,48 0,6 / 0,48 1,2 / 0,48 1,4 / 0,7 1,9 / 0,7
PE PEU V W
L1 L2smd
8 9 20 28 E1 E2 E3 K14 K12
+10
V
+12
V
CO
M
AIN
7
PENL3L2L1
87
+_
71 72
L3
7 28 E1 E2 E3
20 A1 62
PE
AO
UT
TXA
TXB
COM
DIG
OU
T
3/PE 320...528 V ± 0 %48...62 Hz
PES
PEPES
PES
M3~PES PE
0 ... 20 mA4 ... 20 mA
1k ... 10k
+12 ... 30 VDC ±0 %
Collegamenti 3 x 400 VDimensioni
fc
be
a
d
* Versioni trifase con alimentazione 230 V a richiesta.
DrivesInverter smd
1
1-10 Drives, motori, automazione 10/2006
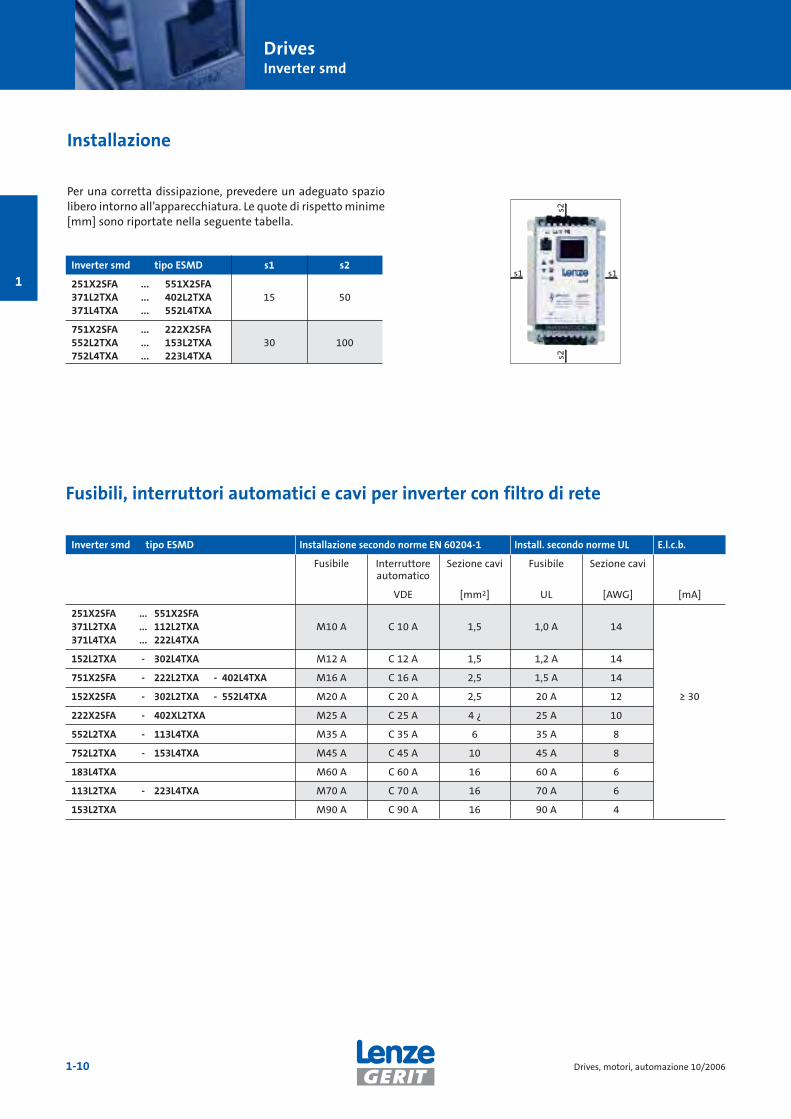
Installazione
Per una corretta dissipazione, prevedere un adeguato spaziolibero intorno all’apparecchiatura. Le quote di rispetto minime[mm] sono riportate nella seguente tabella.
s1s1
s2s2
Inverter smd tipo ESMD s1 s2
251X2SFA ... 551X2SFA371L2TXA ... 402L2TXA 15 50371L4TXA ... 552L4TXA
751X2SFA ... 222X2SFA552L2TXA ... 153L2TXA 30 100752L4TXA ... 223L4TXA
Fusibili, interruttori automatici e cavi per inverter con filtro di rete
Inverter smd tipo ESMD Installazione secondo norme EN 60204-1 Install. secondo norme UL E.l.c.b.
Fusibile Interruttore Sezione cavi Fusibile Sezione caviautomatico
VDE [mm2] UL [AWG] [mA]
251X2SFA ... 551X2SFA371L2TXA ... 112L2TXA M10 A C 10 A 1,5 1,0 A 14371L4TXA ... 222L4TXA
152L2TXA - 302L4TXA M12 A C 12 A 1,5 1,2 A 14
751X2SFA - 222L2TXA - 402L4TXA M16 A C 16 A 2,5 1,5 A 14
152X2SFA - 302L2TXA - 552L4TXA M20 A C 20 A 2,5 20 A 12 ≥ 30
222X2SFA - 402XL2TXA M25 A C 25 A 4 ¿ 25 A 10
552L2TXA - 113L4TXA M35 A C 35 A 6 35 A 8
752L2TXA - 153L4TXA M45 A C 45 A 10 45 A 8
183L4TXA M60 A C 60 A 16 60 A 6
113L2TXA - 223L4TXA M70 A C 70 A 16 70 A 6
153L2TXA M90 A C 90 A 16 90 A 4
DrivesInverter smd
1
1-11Drives, motori, automazione 10/2006
Ampia gamma d’accessori
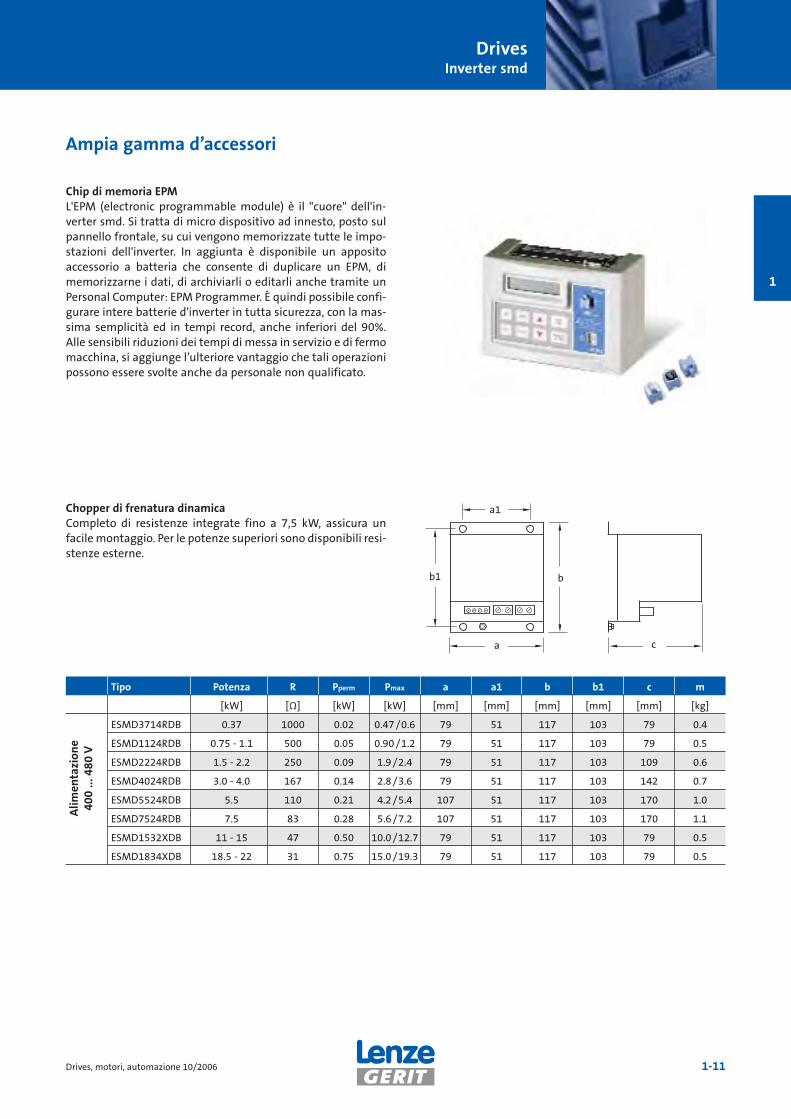
Chip di memoria EPM L'EPM (electronic programmable module) è il "cuore" dell'in-verter smd. Si tratta di micro dispositivo ad innesto, posto sulpannello frontale, su cui vengono memorizzate tutte le impo-stazioni dell'inverter. In aggiunta è disponibile un appositoaccessorio a batteria che consente di duplicare un EPM, dimemorizzarne i dati, di archiviarli o editarli anche tramite unPersonal Computer: EPM Programmer. È quindi possibile confi-gurare intere batterie d'inverter in tutta sicurezza, con la mas-sima semplicità ed in tempi record, anche inferiori del 90%.Alle sensibili riduzioni dei tempi di messa in servizio e di fermomacchina, si aggiunge l’ulteriore vantaggio che tali operazionipossono essere svolte anche da personale non qualificato.
Tipo Potenza R Pperm Pmax a a1 b b1 c m
[kW] [Ω] [kW] [kW] [mm] [mm] [mm] [mm] [mm] [kg]
ESMD3714RDB 0.37 1000 0.02 0.47 / 0.6 79 51 117 103 79 0.4
ESMD1124RDB 0.75 - 1.1 500 0.05 0.90 / 1.2 79 51 117 103 79 0.5
ESMD2224RDB 1.5 - 2.2 250 0.09 1.9 / 2.4 79 51 117 103 109 0.6
ESMD4024RDB 3.0 - 4.0 167 0.14 2.8 / 3.6 79 51 117 103 142 0.7
ESMD5524RDB 5.5 110 0.21 4.2 / 5.4 107 51 117 103 170 1.0
ESMD7524RDB 7.5 83 0.28 5.6 / 7.2 107 51 117 103 170 1.1
ESMD1532XDB 11 - 15 47 0.50 10.0 / 12.7 79 51 117 103 79 0.5
ESMD1834XDB 18.5 - 22 31 0.75 15.0 / 19.3 79 51 117 103 79 0.5
Alim
enta
zion
e 40
0 ...
480
V
a
a1
bb1
c
Chopper di frenatura dinamicaCompleto di resistenze integrate fino a 7,5 kW, assicura unfacile montaggio. Per le potenze superiori sono disponibili resi-stenze esterne.

DrivesInverter smd
1
1-12 Drives, motori, automazione 10/2006
Filtro RFIIl filtro contro i radiodisturbi, indispensabile per un’installazio-ne in conformità alle normative europee, è integrato neimodelli monofase ed è predisposto per il montaggio sotto l’in-verter, per le versioni trifase. Il suo impiego, oltre a ridurre alminimo le procedure d’installazione e collegamento, esalta legià contenute dimensioni di questo inverter.
b1 b
b2
a1a2
a3
d
PE
a
c
Filtro tipo IN a a1 a2 a3 b b1 b2 c d m
[A] [mm] [mm] [mm] [mm] [mm] [mm] [mm] [mm] [mm] [kg]
ESMD1124TMF 4.3 95 63 --- 16 175 160 8.9 43 5.1 0.5
ESMD2224TMF 6.9 118 86 63 16 175 160 8.9 43 5.1 0.5
ESMD5524TMF 14.2 118 86 63 16 175 160 8.9 43 5.1 0.7
ESMD1134TMF 32 150 118 --- 16 226 211 8.9 43 5.1 1.3
ESMD2234TMF 59 198 166 --- 16 283 267 8.9 63 7.1 2.2
Tastiera remotabileLa tastiera remotabile permette di intervenire sui parametri difunzionamento dall’esterno del quadro elettrico.
RUN STOP
18mm
56 mm
86 mm

DrivesInverter smd
1
1-13Drives, motori, automazione 10/2006
Modulo di frenatura
Inverter smd
Kit di montaggio su guida DINSemplifica l’installazione nel quadro elettrico e velocizza gliinterventi di manutenzione.
Versioni a richiesta
Versione trifase con alimentazione 180 ... 264 VQuesta versione copre le potenze da 0,37 a 15 kW ed è richie-sta soprattutto per l’esportazione verso i mercati nord ameri-cani.
Versione push troughtConsente l’installazione nel quadro elettrico tramite una fine-stra passante per il dissipatore.
Versione cold plate
Versione con frequenza in uscita fino a 1000 Hz
Versioni personalizzate per quantità
Versione cold plate

DrivesInverter smd
1
1-14 Drives, motori, automazione 10/2006

DrivesInverter 8200 vector
1
1-15Drives, motori, automazione 10/2006
Gli inverter Lenze 8200 vector costituiscono un nuovo stan-dard di modularità nel campo della tecnologia dell’automazio-ne. Si è così ottenuto un inverter versatile, con prestazioni alvertice della categoria e la certezza di poter rispondere anchealle esigenze future.
L’esclusiva doppia porta seriale FIF e AIFUnici nella propria categoria, questi inverter hanno due porteseriali (tre nei modelli oltre 15 kW) in grado d’offrire la massi-ma personalizzazione. Nell’ampia gamma di moduli I/O, dicomunicazione RS 232/485 e bus di campo, è possibile sceglie-re la propria configurazione ottimale inserendo esclusivamen-te le funzioni effettivamente necessarie al vostro controllo diprocesso. L’azionamento risulta pertanto più performante in quanto piùefficiente, semplice ed economico.
Vasto campo di regolazione e rapidità di risposta Il campo di variazione della coppia (1:10) e della velocità (1:50)senza retroazione, unito ad una rapida risposta di coppia (~200ms), rendono molto interessante questo inverter, sia in appli-cazioni con elevate variazioni del carico, che ovunque siarichiesta stabilità della velocità nell’intero campo di variazio-ne.
Inverter 8200 vector0,25...110 kW
La forza della ragione:modularità e prestazioni
Controllo vettorialeIl controllo vettoriale (ad orientamento di campo) sviluppatoda Lenze consente di ottenere un ampio campo di regolazionedella coppia e della velocità del motore sensorless. Nelle appli-cazioni più semplici, è comunque possibile selezionare un fun-zionamento con caratteristica vettoriale, lineare V/F oppurequadratica.
Molteplicità delle versioniQuesti inverter sono studiati per un impiego universale. La possibilità di scelta tra versioni idonee in vasto campo ditensioni d’alimentazione, monofase e trifase, consentono d’al-largare le possibilità d’applicazione.
monofase 0,25 – 0,37 kW (190-260 V)mono/trifase 0,55 – 2,2 kW (190-260 V)trifase 3,0 – 7,5 kW (190-260 V) trifase 0,55 – 90 kW (320-550 V).
La versione HVAC, per il comando di pompe e ventilatori, coprele potenze fino a 110 kW.

DrivesInverter 8200 vector
1
1-16 Drives, motori, automazione 10/2006
Drive PLC>> Pag. 3-3
I/O remoti>> Pag. 3-7
HMI>> Pag. 3-13
Moduli diespansione
Software di configurazione>> Pagg. 1-77
Telecontrollo>> Pagg. 3-35Motore/motoriduttore
Filtro motorea richiesta
Chopper e resistenze di frenatura>> Pag. 1-91
Drive e accessori
Automazione
Alimentatoricon o senzarecupero inrete>> Pag. 1-84
Interruttori automatici,fusibili, sezione cavi >> pag. 1-96
Rete ~
= DC bus
Filtri di retee filtri RFI>> Pag. 1-87
Moduli AIF: >> Pag. 3-17Tastiera, Profibus-DP, Interbus-S, Systembus CAN, DeviceNet,Lecom
Moduli FIF: >> Pag. 3-17Standard I/O, Application I/O,Profibus-DP, Profibus I/O,Interbus-SCAN, CAN I/O, DeviceNet,ASi, Lecom
Versione con potenza0,25 - 11 kW
Versione con potenza15 - 110 kW
Interfaccia AIF
Interfaccia FIF
Inverter 8200 base >> Pag. 3.16

DrivesInverter 8200 vector
1
1-17Drives, motori, automazione 10/2006
Prestazioni e precisioneQuesti inverter sono in grado d’erogare un’elevata coppia dispunto anche a frequenze < 1 Hz:
˘ 180% per le grandezze fino a 11 kW˘ 210% per le grandezze da 15 a 90 kW.
La coppia disponibile è estremamente lineare in tutto il campodi variazione della velocità. Anche la rotondità del movimentoè eccellente, in quanto soggetta a variazioni inferiori ± 0,1Hz.Nel funzionamento a velocità costante la precisione è < 1% intutto il campo di utilizzo, senza necessità di retroazione.
Operare in sistemi remotatiI moduli I/O (standard e application) e la disponibilità di nume-rosi moduli di comunicazione (InterBus S, Profibus DP, CanBus,DeviceNet, RS 232/485) garantiscono la massima integrazionein sistemi automatizzati.
Rapida messa in servizioLe funzioni già configurate per le applicazioni standard con-sentono di attuare la messa in servizio in brevissimo tempo.
Sicurezza integrataLa funzione di scollegamento sicuro del motore (variante“safety lock”) che impedisce un riavvio indesiderato in caso dierrore, può essere integrata nell’inverter. Rispetto ai sistemitradizionali, questa soluzione risulta particolarmente efficaceed economica. L’interruzione dell’alimentazione del motoreviene realizzata internamente, tra la logica di controllo e lasezione di potenza. Si eliminano cablaggi aggiuntivi e l’instal-lazione di antieconomici teleruttori, inoltre con la certezza diconformità ai requisiti della categoria 3 della normativa EN954 parte 1 e 2 (dal 01.01.2007: EN ISO 13849).
Versatilità da primatoL’inverter 8200 vector dispone di numerosissime interessanticaratteristiche e funzioni esclusive: ˘ transistor di frenatura integrato (fino a 11 kW)˘ filtro RFI livello A/B integrato (fino a 11 kW)˘ ingressi e uscite analogici e digitali liberamente
configurabili˘ frequenza di chopper selezionabile fino a 16 kHz˘ possibilità di selezionare un funzionamento con
caratteristica vettoriale, lineare V/F oppure quadratica˘ uscita programmabile a relé ˘ ingresso/uscita in frequenza˘ inversione del livello logico˘ controllo PID˘ rampe ad S˘ 4 parametrizzazioni selezionabili on-line˘ 12 velocità jog˘ riferimento bipolare˘ riferimento addizionale˘ uscite dei segnali di processo˘ identificazione automatica dei parametri del motore˘ controllo rottura cinghia˘ riavvio al volo del motore.
Veloce e facile adattamento dei parametriImpiegando la tastiera alfanumerica o via BUS, è possibileimpostare, con la massima semplicità, i parametri e modifica-re on-line direttamente le condizioni operative.Una password opzionale di protezione impedisce un’accessonon autorizzato alla selezione dei parametri. La tastiera puòanche essere remotata, impiegando l’apposita consolle, oppu-re montata sulla porta del quadro elettrico.
ModularitàCon questa serie, Lenze ha introdotto un nuovo standard dimodularità nel campo della tecnologia dell’automazione. Nel-l’ampia gamma di moduli, descritti dettagliatamente nellasezione “moduli aggiuntivi”, è possibile scegliere la configura-zione ottimale per la propria applicazione. Il concetto modula-re degli inverter 8200 vector offre, inoltre, la certezza di potercontare sulla possibilità di futuri aggiornamenti delle macchi-ne sulle quali sono installati.
100%
180%
210%
Velocità n [giri/min]0 500 1000 1500
grandezze da 15 a 90 kW
grandezze fino a 11 kW
Andamento della coppia

DrivesInverter 8200 vector
1
1-18 Drives, motori, automazione 10/2006
8200 vector di potenza: 15...110 kW
Sebbene caratterizzati dalle medesime funzionalità dei model-li minori, gli iinverter 8200 vector con potenza oltre 15 kWoffrono un’importante novità: sono ora disponibili ben tre por-te per moduli aggiuntivi.La versatilità raggiunta da questi nuovi modelli è senza pari.Essi sono infatti in grado di supportare ben 16 differenti modu-
Esempio d’impiego delle porte
In questo esempio, l'inverter 8200 vector è in grado di raccogliere
ed inviare in rete segnali digitali provenienti da sensori.
L'inverter, può essere controllato via PROFIBUS ed inviare al PLC i
segnali provenienti dal campo e viceversa. La tastiera LCD è
inoltre impiegata per la diagnostica. La presenza di ben tre porte
per moduli d’espansione I/O e bus, consente la massima
versatilità e permette anche un decentramento effettivo di
numerose funzioni.
li di comunicazione. Le numerose combinazioni di bus permettono a questi inver-ter di costituire un vero e proprio anello di collegamento frareti differenti, ad esempio: CAN Open per il dialogo fra i drive,ProfiBus per il controllo. I moduli I/O, trasparenti verso il bus di campo, offrono inoltrefunzionalità molto apprezzate nei macchinari che sfruttano letecnologie basate sul concetto dell’intelligenza distribuita.
Porta n°1 per moduli AIF
Tastiera
Porta n°2 per moduli FIF
Modulo: PROFIBUS DP
Porta n°3 per moduli FIF
Modulo: Standard I/O
Segnali digitali
Alimentazione 3~400 V
PROFIBUS

DrivesInverter 8200 vector
1
1-19Drives, motori, automazione 10/2006
Coppia di spunto modelli fino 11 kW: 1.8 x MNom (1 s); 1.5 x MNom (60 s) modelli da 15 kW: 2,1 x MNom (3 s); 1.5 x MNom (60 s)
Campo di regolazione della coppia 1:10 (3...50 Hz, velocità costante)
Controllo sensorless della velocità frequenza min. uscita 1,0 Hz (0...MN)campo di regolazione 1:50 con coppia MNom (riferito a 50 Hz),precisione 0,5% (3...50 Hz)scorrimento ± 0.1 Hz (3...50 Hz)
Frequenza di chopper modelli fino 11 kW: a scelta 2, 4, 8, 16 kHz modelli da 15 kW: a scelta 1, 2, 4, 8, 16 kHz
Massima lunghezza cavi motore cavi schermati 50 m dati relativi alla tensione di rete ecavi non schermati 100 m con frequenza di chopper di 8 kHz
Protezione IP20
Immunità alle vibrazioni fino a 0,7 g (in accordo a: Germanischer Lloyd, allgemeine Bedingungen)
Classe immunità EMC filtro integrato livello A e B, secondo normative EN55011/EN55022 (solo modelli fino 11 kW)
Condizioni ambientali Classe 3K3 secondo EN 50178 (umidità relativa < 85% senza condensa)
Temperatura ambiente funzionamento: –10...+ 55 °C (> 40°C con riduzione di potenza)trasporto: –25...+ 70 °Cstoccaggio: –25...+ 60 °C
Riduzione di potenza > 40° ~ ≥ 55°C: riduzione del 2,5% ogni 1°K> 1000 ~ ≤ 4000 m (s.l.m.): riduzione del 5% ogni 1000 m
Frequenza in uscita Campo -650 Hz...+650 Hz
Risoluzione assoluta 0,02 Hznormalizzata parametro: 0,01%, dati processo: 0,006% (=214)
Riferimento digitale precisione ± 0,005 Hz (= ±100 p/min)
Riferimento analogico linearità ± 0,5% livello segnale: 5 V o 10 Vsensibilità alla temperatura + 0,3% 0...60°Coffset ± 0%
Moduli I/O Ingressi Usciteanalogici digitali in frequenza analogiche digitali in frequenza
Standard I/O E82FAFS (FIF) 1 4 1 1 1 –
Application I/O E82ZAFA (FIF) 2 6 1 2 2 1
CAN I/O E82ZAFCC210 – 2 – – – –
Profibus I/O E82ZAFPC201 – 2 – – – –
Moduli Bus InterBus-S: EMF2113IB (per porta AIF) E82ZAFI (per porta FIF)ProfiBus-DP: EMF2133IB (per porta AIF) E82ZAFP (per porta FIF)Systembus (CAN): EMF2171IB (per porta AIF) E82ZAFC (per porta FIF)CanBus con indirizzo: EMF2172IB (per porta AIF)DeviceNet: EMF2175IB (per porta AIF) E82ZAFD (per porta FIF)AS-Interface E82ZAFF (per porta FIF)
Moduli seriali Lecom A/B RS232/485: EMF2102IB-V001 (per portaAIF)Lecom B RS485: EMF2102IB-V002 (per portaAIF) E82ZAFL (per porta FIF)Lecom-LI fibra ottica: EMF2102IB-V003 (per portaAIF)
Ulteriori opzioni Variante Cold Plate, per potenze da 0,25 a 22 kWVariante 200, senza filtro integrato, per potenze da 0,25 a 11 kWVariante IT, per potenze da 15 a 90 kWSoftware Global Drive ControlTastiera remotabile completa di supporto ergonomico
Certificazioni UL, cUL, CE, VDE, DIN, EN, GL
Tempo ciclo Ingressi digitali 1 msUscite digitali 4 msIngressi analogici 2 msUscite analogiche 4 ms (tempo filtro 10 ms)
Uscita relè (configurabile) modelli fino 11 kW: 1 x 250 VCA / 3 A, 24 VCC / 2 A ...240 V / 0,22 Amodelli da 15 kW: 2 x 250 VCA / 3 A, 24 VCC / 2 A ...240 V / 0,22 A
Transistor di frenatura modelli fino 11 kW: integratomodelli da 15 kW: con modulo esterno
Caratteristiche (tutti i modelli 0,25...110 kW)

DrivesInverter 8200 vector
1
1-20 Drives, motori, automazione 10/2006
Dati tecnici: modelli a 230 V (0,25...7,5 kW), funzionamento gravoso con sovraccarichi fino al 150%
* Frequenza di chopper.** Funzionamento solo con induttanza di rete.– Disponibili anche senza filtro di rete integrato per applicazioni multi inverter: variante 200.– Disponibili anche in versione Cold Plate, per inverter da 0,25 a 22 kW.
Tipo E82EV251K2C E82EV371K2C E82EV551K2C E82EV751K2C E82EV152K2C E82EV222K2C
Potenza motore (4 poli ASM) PN [kW] 0,25 0,37 0,55 0,75 1,5 2,2
Alimentazione tensione Vrete [V] 1 x 180 V…264 V ± 0% 1/3 x 180 V…264 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0% 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] non possibile 140 VDC...370 VDC ± 0%
Tipo di alimentazione [A] 1 fase 1 fase 1 fase 3 fase 1 fase 3 fase 1 fase 3 fase 1 fase 3 fase
Corrente nominale assorbita INrete [A] 3,4 5,0 6,0 3,9 9,0 5,2 15,0 9,1 18,0 12,4
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 1,7 2,4 3,0 4,0 7,0 9,5con frequenza
(8 kHz)* IN8 [A] 1,7 2,4 3,0 4,0 7,0 9,5di commutazione(16 kHz)* IN16 [A 1,1 1,6 2,0 2,6 4,6 6,2
Corrente max. in uscita (2/4k Hz)* Imax2/4 [A] 2,5 3,6 4,5 6,0 10,5 14,2per 60s con frequenza
(8 kHz)* Imax8 [A] 2,5 3,6 4,5 6,0 10,5 14,2di commutazione(16 kHz)* Imax16 [A] 1,7 2,3 2,9 3,9 6,9 9,3
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 30 40 50 60 100 130
Dimensioni: (h x L x p) [mm] 120 x 60 x 140 180 x 60 x 140 240 x 60 x 140
Peso m [kg] 0,8 1,2 1,6
Tipo E82EV302K2C E82EV402K2C E82EV552K2C E82EV752K2C
Potenza motore (4 poli ASM) PN [kW] 3 4 5,5 7,5 **
Alimentazione tensione Vrete [V] 3 x 100 V…264 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 140 VDC...370 VDC ± 0%
Corrente nominale assorbita INrete [A] 15,6 21,3 29,3 28
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 12 16,5 22,5 28,6con frequenza
(8 kHz)* IN8 [A] 12 16,5 22,5 28,6di commutazione (16 kHz)* IN16 [A 7,8 10,7 14,6 18,6
Corrente max. in uscita (2/4k Hz)* Imax2/4 [A] 18 24,8 33,8 42,9per 60s con frequenza
(8 kHz)* Imax8 [A] 18 24,8 33,8 42,9di commutazione (16 kHz)* Imax16 [A] 11,7 16,1 21,9 27,9
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 150 190 250 320
Dimensioni: (h x L x p) [mm] 240 x 100 x 140 240 x 100 x 140 240 x 125 x 140 240 x 125 x 140
Peso m [kg] 2,9 2,9 3,6 3,6

DrivesInverter 8200 vector
1
1-21Drives, motori, automazione 10/2006
Tipo E82EV251K2C E82EV371K2C E82EV551K2C E82EV751K2C E82EV152K2C E82EV222K2C
Potenza motore (4 poli ASM) PN [kW] 0,37 – 0,75 1,1 2,2** –
Alimentazione tensione Vrete [V] 1 x 180 V…264 V ± 0% 1/3 x 180 V…264 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0% 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] non possibile 140 VDC...370 VDC ± 0%
Tipo di alimentazione [A] 1 fase 1 fase 3 fase 1 fase 3 fase 1 fase 3 fase
Corrente nominale assorbita Irete [A] 4,1 7,2 4,2 9,0 4,4 18,0 10,4
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 2,0 3,6 4,8 8,4
Corrente max. per 60s (2/4k Hz)* Imax2/4 [A] 2,5 4,5 6,0 10,5
Tensione in uscita VM [V] 3 x 0...rete 3 x 0...rete
Frequenza in uscita [Hz] 0....650 0....650
Potenza dissipata a IN Ploss [W] 30 50 60 100
Dimensioni: (h x L x p) [mm] 120 x 60 x 140 180 x 60 x 140 240 x 60 x 140
Peso m [kg] 0,8 1,2 1,6
Dati tecnici: modelli a 230 V (0,37...7,5 kW), funzionamento con potenza motore incrementata
* Frequenza di chopper.** Funzionamento solo con induttanza di rete.– Disponibili anche senza filtro di rete integrato per applicazioni multi inverter: variante 200
Tipo E82EV302K2C E82EV402K2C E82EV552K2C E82EV752K2C
Potenza motore (4 poli ASM) PN [kW] 4 – 7,5 –
Alimentazione tensione Vrete [V] 3 x 100 V…264 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 140 VDC...370 VDC ± 0%
Corrente nominale assorbita INrete [A] 18,7 25,2
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 14,4 27,0
Corrente max. per 60s (2/4k Hz)* Imax2/4 [A] 18,0 33,8
Tensione in uscita VM [V] 3 x 0...rete 3 x 0...rete
Frequenza in uscita [Hz] 0....650 0....650
Potenza dissipata a IN Ploss [W] 150 250
Dimensioni: (h x L x p) [mm] 240 x 100 x 140 240 x 125 x 140
Peso m [kg] 2,9 3,6

DrivesInverter 8200 vector
1
1-22 Drives, motori, automazione 10/2006
* Frequenza di commutazione.** Funzionamento solo con induttanza di rete.– Disponibili anche senza filtro di rete integrato: variante 200.– Disponibili anche in versione Cold Plate per inverter da 0,25 a 22 kW Push-through.
Dati tecnici: modelli a 400/500 V (0,55...11 kW), funzionamento gravoso con sovraccarichi fino al 150%
Tipo E82EV551K4C E82EV751K4C E82EV152K4C E82EV222K4C
Potenza motore (4 poli ASM) PN [kW] 0,55 0,75 1,5 2,2
Alimentazione tensione Vrete [V] 3 x 320 V…550 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 450 VDC...775 VDC ± 0%
Dati per alimentazione a VNrete [V] 400 500 400 500 400 500 400 500
Corrente nominale assorbita INrete [A] 2,5 2,0 3,3 2,6 5,5 4,4 7,3 5,8
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 1,8 1,4 2,4 1,9 4,7 3,1 5,6 4,5con frequenza
(8 kHz)* IN8 [A] 1,8 1,4 2,4 1,9 3,9 3,1 5,6 4,5di commutazione (16 kHz)* IN16 [A 1,2 0,9 1,6 1,2 2,5 2,0 3,6 2,9
Corrente max. in uscita (2/4k Hz)* Imax2/4 [A] 2,7 2,7 3,6 3,6 5,9 5,9 8,4 8,4per 60s con frequenza
(8 kHz)* Imax8 [A] 2,7 2,7 3,6 3,6 5,9 5,9 8,4 8,4di commutazione (16 kHz)* Imax16 [A] 1,8 1,35 2,4 1,85 3,8 3,0 5,5 4,4
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 50 60 100 130
Dimensioni: (h x L x p) [mm] 180 x 60 x 140 180 x 60 x 140 240 x 60 x 140 240 x 60 x 140
Peso m [kg] 1,2 1,2 1,6 1,6
Tipo E82EV302K4C E82EV402K4C E82EV552K4C E82EV752K4C E82EV113K4C
Potenza motore (4 poli ASM) PN [kW] 3 4 5,5 7,5 11**
Alimentazione tensione Vrete [V] 3 x 320 V…550 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 450 VDC...775 VDC ± 0%
Dati per alimentazione a Vrete [V] 400 500 400 500 400 500 400 500 400 500
Corrente nominale assorbita Irete [A] 9 7,2 12,3 9,8 16,8 13,4 21,5 17,2 21 16,8
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 7,3 5,8 9,5 7,6 13 10,4 16,5 13,2 23,5 18,8con frequenza
(8 kHz)* IN8 [A] 7,3 5,8 9,5 7,6 13 10,4 16,5 13,2 23,5 18,8di commutazione (16 kHz)* IN16 [A 4,7 3,8 6,1 4,9 8,4 6,8 10,7 8,6 13 12,2
Corrente max. in uscita (2/4k Hz)* Imax2/4 [A] 11 11 14,2 14,2 19,5 19,5 24,8 24,8 35,3 35,3per 60s con frequenza
(8 kHz)* Imax8 [A] 11 11 14,2 14,2 19,5 19,5 24,8 24,8 35,3 35,3di commutazione (16 kHz)* Imax16 [A] 7 5,7 9,1 7,9 12,6 10 16,0 12,9 19,5 18,3
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 145 180 230 300 410
Dimensioni: (h x L x p) [mm] 240 x 100 x 140 240 x 100 x 140 240 x 100 x 140 240 x 125 x 140 240 x 125 x 140
Peso m [kg] 2,9 2,9 2,9 3,6 3,6

DrivesInverter 8200 vector
1
1-23Drives, motori, automazione 10/2006
Tipo E82EV551K4C E82EV751K4C E82EV152K4C E82EV222K4C
Potenza motore (4 poli ASM) PN [kW] 0,75 1,1 – 3
Alimentazione tensione Vrete [V] 3 x 320 V…550 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 450 VDC...775 VDC ± 0%
Dati per alimentazione a VNrete [V] 400 400 400
Corrente nominale assorbita INrete [A] 2,9 2,8 6,1
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 2,2 2,9 6,7
Corrente max. per 60s (2/4k Hz)* Imax2/4 [A] 2,7 3,6 8,4
Tensione in uscita VM [V] 3 x 0...rete 3 x 0...rete
Frequenza in uscita [Hz] 0....650 0....650
Potenza dissipata a IN Ploss [W] 50 60 130
Dimensioni: (h x L x p) [mm] 180 x 60 x 140 180 x 60 x 140 240 x 60 x 140
Peso m [kg] 1,2 1,2 1,6
Dati tecnici: modelli a 400 V (0,75...5,5 kW), funzionamento con potenza motore incrementata
* Frequenza di commutazione.** Funzionamento solo con induttanza di rete.– Disponibili anche senza filtro di rete integrato per applicazioni multi inverter: variante 200
Tipo E82EV302K4C E82EV402K4C E82EV552K4C E82EV752K4C E82EV113K4C
Potenza motore (4 poli ASM) PN [kW] 4 5,5 – – –
Alimentazione tensione Vrete [V] 3 x 320 V…550 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 450 VDC...775 VDC ± 0%
Dati per alimentazione a Vrete [V] 400 400
Corrente nominale assorbita Irete [A] 10,8 10,6
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 8,7 11,4
Corrente max. per 60s (2/4k Hz)* Imax2/4 [A] 11 14,2
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 145 180
Dimensioni: (h x L x p) [mm] 240 x 100 x 140 240 x 100 x 140
Peso m [kg] 2,9 2,9

DrivesInverter 8200 vector
1
1-24 Drives, motori, automazione 10/2006
Dati tecnici: modelli a 400/500 V (15...90 kW), funzionamento gravoso con sovraccarichi fino al 150%
* Frequenza di commutazione.** Con induttanza/filtro di rete– Disponibili solo senza filtro di rete integrato oppure con filtro preassemblato.– Disponibili anche in versione Cold Plate per inverter da 0,25 a 22 kW Push-through.– Versione speciale di inverter da 15 a 90 kW per il collegamento a reti IT.
Tipo E82EV153K4B201 E82EV223K4B201 E82EV303K4B201 E82EV453K4B201
Potenza motore (4 poli ASM) PN [kW] 15 22 30 45
Alimentazione tensione Vrete [V] 3 x 320 V…550 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 450 VDC...775 VDC ± 0%
Dati per alimentazione a VNrete [V] 400 500 400 500 400 500 400 500
Corrente nominale assorbita INrete [A] 29 29 42 42 55 55 80 80
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 32 32 47 47 59 56 89 84con frequenza
(8 kHz)* IN8 [A] 32 32 47 47 59 56 89 84di commutazione (16 kHz)* IN16 [A 24 22 35 33 44 41 58 54
Corrente max. in uscita (2/4k Hz)* Imax2/4 [A] 48 48 70,5 70,5 89 84 134 126per 60s con frequenza
(8 kHz)* Imax8 [A] 48 48 70,5 70,5 89 84 88 82di commutazione (16 kHz)* Imax16 [A] 36 33 53 49 66 61 81 75
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 430 640 810 1100
Dimensioni: (h x L x p) [mm] 350 x 250 x 250 350 x 250 x 250 350 x 250 x 250 510 x 340 x 285
Peso m [kg] 15 15 15 33,5
Tipo E82EV553K4B201 E82EV753K4B201 E82EV903K4B201
Potenza motore (4 poli ASM) PN [kW] 55 75 90
Alimentazione tensione Vrete [V] 3 x 320 V…550 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 450 VDC...770 VDC ± 0%
Dati per alimentazione a VNrete [V] 400 500 400 500 400 500
Corrente nominale assorbita INrete [A] 100 100 135 135 165 165
Corrente nom. in uscita (2/4k Hz)* IN2/4 [A] 110 105 150 142 180 171 con frequenza
(8 kHz)* IN8 [A] 110 105 150 142 171 162 di commutazione (16 kHz)* IN16 [A 77 72 105 98 108 99
Corrente max. in uscita (2/4k Hz)* Imax2/4 [A] 165 157 225 213 270 256per 60s con frequenza
(8 kHz)* Imax8 [A] 165 157 225 213 221 211di commutazione (16 kHz)* Imax16 [A] 100 94 136 128 140 130
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 1470 1960 2400
Dimensioni: (h x L x p) [mm] 591 x 340 x 285 680 x 450 x 285 680 x 450 x 285
Peso m [kg] 36,5 59 59

DrivesInverter 8200 vector
1
1-25Drives, motori, automazione 10/2006
Tipo E82EV153K4B201 E82EV223K4B201 E82EV303K4B201 E82EV453K4B201
Potenza motore (4 poli ASM) PN [kW] 22 30 37,5 55
Alimentazione tensione Vrete [V] 3 x 320 V…550 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione alternativa CC VDC [VDC] 460 VDC...620 VDC ± 0%
Dati per alimentazione a VNrete [V] 400 400 400 400
Corrente nominale assorbita INrete [A] 39 50 60 97
Corrente nom. uscita (1/2/4k Hz)* IN2/4 [A] 43 56 66 100
Corrente max. per 60s (1/2/4k Hz)* IN2/4 [A] 48 70,5 89 134
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 430 640 810 1100
Dimensioni: (h x L x p) [mm] 350 x 250 x 250 350 x 250 x 250 350 x 250 x 250 510 x 340 x 285
Peso m [kg] 15 15 15 33,5
Dati tecnici: modelli a 400 V (22...110 kW), funzionamento con potenza motore incrementata
* Frequenza di commutazione.– Disponibili solo senza filtro di rete integrato per applicazioni multi inverter.– In preparazione versione con filtro preassemblato.
Tipo E82EV553K4B201 E82EV753K4B201 E82EV903K4B201
Potenza motore (4 poli ASM) PN [kW] 75 90 110
Alimentazione tensione Vrete [V] 3 x 320 V…550 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione alternativa CC VDC [VDC] 460 VDC...620 VDC ± 0%
Dati per alimentazione a VNrete [V] 400 400 400
Corrente nominale assorbita INrete [A] 119 144 185
Corrente nom. uscita (1/2/4k Hz)* IN2/4 [A] 135 159 205
Corrente max. per 60s (1/2/4k Hz)* IN2/4 [A] 165 22 270
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 1470 1960 2400
Dimensioni: (h x L x p) [mm] 591 x 340 x 285 680 x 450 x 285 680 x 450 x 285
Peso m [kg] 36,5 5 59

DrivesInverter 8200 vector
1
1-26 Drives, motori, automazione 10/2006
Tipo E82EV251K2C E82EV371K2C E82EV551K2C E82EV751K2C E82EV152K2C E82EV222K2C
Soglia tensione [VDC] 380 (fisso)
Corrente di picco [ADC] 0,85 4,0 8,6
Corrente max. continuativa [ADC] 0,85 2,0 5,8
Potenza di frenatura di picco Pmax [kW] 0,3 1,5 3,2
Potenza di frenatura continuativa Pcont [kW] 0,3 0,75 2,2
Resistenza minima di frenatura Rmin [Ω] 470 90 47
Riduzione di potenza 40°C < T < 60°C: 2%/K°1000 m s.l.m. < h < 4000 m s.l.m.: 5%/1000 m
Ciclo di frenatura Max. 60 s frenando alla Pmax, con almeno 60 s d’intervallo fino alla frenata successiva
Resistenze tipo DZ 3309 DZ 3311 DZ 3312
Tipo E82EV551K4C E82EV751K4C E82EV152K4C E82EV222K4C
Soglia tensione [VDC] 790
Corrente di picco [ADC] 1,9 3,8 5,6
Corrente max. continuativa [ADC] 0,96 1,92 2,8
Potenza di frenatura di picco Pmax [kW] 1,5 3,0 4,4
Potenza di frenatura continuativa Pcont [kW] 0,75 1,5 2,2
Resistenza minima di frenatura Rmin [Ω] 455 230 155
Riduzione di potenza 40°C < T < 60°C: 2%/K°1000 m s.l.m. < h < 4000 m s.l.m.: 5%/1000 m
Ciclo di frenatura Max. 60 s frenando alla Pmax, con almeno 60 s d’intervallo fino alla frenata successiva
Resistenze Tipo DZ 3309 DZ 3301 DZ 3310
Dati tecnici
Transistor di frenatura integrato
Gli inverter 8200 vector, con potenza fino a 11 kW, sono com-pleti di un transistor di frenatura integrato. Per la frenaturadei modelli oltre 15 kW sono disponibili appositi moduliriportati nella sezione Accessori. Il transistor integrato con-sente una frenatura controllata dell’azionamento. L’energiaprodotta dal motore viene deviata su apposite resistenzeesterne e quindi dissipata sotto forma di calore. .
Frenatura con recupero in reteIn caso d’applicazioni con azionamenti multiasse può esserevantaggioso l’impiego di un modulo alimentatore. Questa soluzione offre la possibilità di notevoli risparmi ener-getici in quanto consente il recupero in rete dell’energiagenerata durante la frenatura.
Tipo E82EV302K4C E82EV402K4C E82EV552K4C E82EV752K4C E82EV113K4C
Soglia tensione [VDC] 790
Corrente di picco [ADC] 7,8 7,8 11,4 16,5 23,5
Corrente max. continuativa [ADC] 3,9 5,1 7,0 9,6 14,1
Potenza di frenatura di picco Pmax [kW]
Potenza di frenatura continuativa Pcont [kW]
Resistenza minima di frenatura Rmin [Ω] 100 100 68 47 47
Riduzione di potenza 40°C < T < 60°C: 2%/K°1000 m s.l.m. < h < 4000 m s.l.m.: 5%/1000 m
Ciclo di frenatura Max. 60 s frenando alla Pmax, con almeno 60 s d’intervallo fino alla frenata successiva
Resistenze Tipo DZ 3313 DZ 3303 DZ 3303 DZ 3314 DZ 3314

Drives on boardInverter 8200 motec
1
1-27Drives, motori, automazione 10/2006
L’inverter vettoriale 8200 motec è un prodotto di punta, parti-colarmente studiato per ottimizzare l’integrazione nei sistemidi processo parziali attraverso un sistema intelligente.
˘ Sistema modulare aperto specifico per ogni applicazione˘ Infinite combinazioni con motoriduttori, motori, accessori.˘ “Plug & drive” grazie alla semplicità del sistema.˘ Doppia porta seriale che consente l’inserimento e la
combinazione tra moduli funzione e moduli dicomunicazione.
Il motore/motoriduttore trifase finora impiegato per applica-zioni a velocità fissa, può ora essere usato a velocità variabile,inserito in una rete e applicato in modo versatile.
Ulteriori vantaggi˘ accesso semplificato grazie al montaggio a parete˘ integrazione in sistemi di processo automatici˘ filtro RFI integrato (livello B)˘ contenimento dei costi: “all in one”˘ massima capacità di sovraccarico senza la necessità di una
ventilazione separata (es. funzionamento start/stop)˘ elevata flessibilità grazie al sistema termico indipendente˘ controllo di processo (es. controllo PID standard)˘ semplice messa in servizio, connessioni ad innesto
Massima affidabilità e compatibilità˘ protezione IP65, fino a 2,2 kW, oltre IP54˘ resistenza alle vibrazioni secondo Germanischem Lloyd (GL)˘ certificazione UL/cUL
Inverter 8200 motec0,25...7,5 kW
Tecnologia vector on-board
Veloce e facile modifica dei parametri operativi I parametri dell’inverter possono essere facilmente adattatialle condizioni della macchina, via bus, direttamente dal pul-pito di comando. Possibilità di password per la protezione daaccessi non autorizzati.
Regolazioni centralizzate La connessione ad un sistema di livello superiore consente ilcontrollo, il monitoraggio e quindi una miglior integrazione insistemi complessi.
Funzioni di controllo˘ PTC˘ controllo guasto sulle fasi ˘ controllo rottura cinghia˘ controllo del freno meccanico (opzionale) con possibilità
d’impostare salti di frequenza per superare eventualirisonanze meccaniche.

Drives on boardInverter 8200 motec
1
1-28 Drives, motori, automazione 10/2006
Drive e accessori
Fusibili, interruttoriautomatici e cavi>> Pag. 1-95
Rete ~
Connettore per rete passante>> Pag. 1-29
Resistenze difrenatura>> Pag. 1-94
Adattatori perinstallazione sul motore
8200 motec base >> Pag. 1-xx
1 x 230 V, 0,25 - 0,37kW 3 x 400 V; 0,55 - 7,5 kW
Interfaccia FIF
Alimentatore DCper freno motore>> Pag. 1-xx???
Potenziometro/selettore comandi
Interfaccia per tastiera oRS232 con impugnaturapalmare >> Pag. 3-19
Moduli FIF:Standard I/O, Application I/O,Profibus-DP, Profibus I/O,Interbus-S, Systembus CAN, CAN I/O, DeviceNet,ASi, Lecom, Bus I/O >> Pag. 3-17
Drive PLC>> Pag. 3-3
I/O remoti>> Pag. 3-7
HMI>> Pag. 3-13
Moduli diespansione
Software di configurazione>> Pagg. 1-77
Telecontrollo>> Pagg. 3-35
Motore/motoriduttore
Automazione

Drives on boardInverter 8200 motec
1
1-29Drives, motori, automazione 10/2006
Decentramento dell’intelligenzaL’installazione direttamente nel cuore della macchina, la pos-sibilità d’integrazione nei più diffusi bus di campo e la dispo-nibilità di I/O per la ricezione ed invio in rete dei segnali di pro-cesso, semplificano la realizzazione di macchine ed impiantiautomatici basati su moduli macchina indipendenti.
Installazione "no limit"Gli inverter 8200 motec, fino a 2,2 kW, sono termicamenteindipendenti dalla ventilazione del motore e possono esseremontati direttamente sul motore oppure a bordo macchina, inqualsiasi posizione. Per le potenze superiori, il montaggio abordo macchina richiede l’impiego dell’apposito modulo auto-ventilato opzionale. Questa possibilità d’installazione aumen-ta la flessibilità degli inverter 8200 motec, ottimizza gli ingom-bri e migliora l'accessibilità.
Cablaggi semplificatiIl decentramento dell’inverter determina anche evidenti van-taggi nella razionalizzazione e semplificazione dei cablaggi.Basti pensare alla completa eliminazione delle problematichedovuta alla lunghezza dei cavi di collegamento tra aziona-mento e motore. Tramite l’apposito connettore opzionale, codice E82ZWKN4, èpossibile realizzare una rete di alimentazione passante per col-legare più inverter, consentendo un ulteriore semplificazione eriduzione dei costi d’installazione. L’armadio elettrico potrà essere molto più compatto o in alcu-ni casi, sparire del tutto.
Monitoraggio dello stato direttamente sul postoIl display LED presente sul motec consente una facile e velocericognizione dello stato del motore e del processo.
Variazione personalizzata della velocità˘ potenziometro˘ tensione master / corrente master˘ funzione motopotenziometro˘ tastiera ˘ velocità jog.
Versione motec motoriduttore
Affidabilità e compatibilitàI motoriduttori Lenze sono realizzati e collaudati per risponderea severi standard qualitativi e di robustezza, a garanzia di unalunga durata del vostro sistema di azionamento. Le numerose tipologie, esecuzioni ed opzioni disponibili (freno,ventilazione separata, ecc) ne assicurano la perfetta risponden-za anche alle più specifiche esigenze applicative.
Compattezza e facile integrazioneLa qualità dei materiali impiegati per la realizzazione degliingranaggi, il profilo ottimizzato e la rettifica dei denti deter-minano l’elevata potenza specifica e l’alto rendimento di que-sti riduttori.La grande versatilità della carcassa consente una facile inte-grazione anche in condizioni difficili.

Drives on boardInverter 8200 motec
1
1-30 Drives, motori, automazione 10/2006
Tipi di comando • Interruttore CCW/CW• Interruttore Start/stop• Potenziometro di riferimento
Azionamento singolo
Azionamenticoordinati da bus di campo
Motore azionato damotec a parete
Condizioni ambientali
-20
+60
Motec + MotoriduttoreSistema integrato modulare
Rete di alimentazione
Bus di campo
Dimensionil p
h
h1
l p
Motec Motore Potenza nom. Velocità Coppia Corrente Tensione Inerzia Peso solo Dimensionitipo taglia motec motore nom. nom. alim. d'inerzia motore motec motore
PN nN MN IN U (50 HZ) J m l p h h1
[kW] [giri/min] [Nm] [A] [V] [10-3 kgm2] [kg] [mm]
E82MV251-2B 71-12 0,25 0,25 1355 1,8 0,85 230 0,6 1,8 5,9 190 138 100 210
E82MV371-2B 71-22 0,37 0,37 1345 2,6 1,15 230 0,8 1,8 6,6 190 138 100 210
E82MV551-4B 80-12 0,55 0,55 1370 3,9 1,6 400 1,6 2,8 8,6 202 156 151 219
E82MV151-4B 80-32 0,75 0,75 1390 5,2 1,9 400 1,9 2,8 9,8 202 156 151 219
90-12 1,5 1,1 1405 7,5 2,6 400 2,6 4,1 14,0 230 176 167 245E82MV152-4B
90-32 1,5 1,5 1410 10,2 3,5 400 3,4 4,1 17,2 230 176 167 245
E82MV222-4B 100-12 2,2 2,2 1425 14,7 4,8 400 5,7 4,1 25,0 230 176 167 258
E82MV402-4B 100-32 3,0 3,0 1415 20,2 6,5 400 6,5 9,7 26,0 325 211 163* 256
E82MV402-4B 112-22 4,0 4,0 1435 26,6 8,3 400 11,8 9,7 34,0 325 211 163* 270
E82MV552-4B 132-12 5,5 5,5 1450 36,2 11,0 400 29,0 9,7 62,0 325 211 163* 290
E82MV752-4B 132-22 7,5 7,5 1450 49,4 14,6 400 35,0 9,7 73,0 325 211 163* 290
Motec con motore IEC Lenze tipo MDXMA
* In caso di montaggio a parete, questi motec necessitano del modulo di raffreddamento E82ZMV. L’altezza complessiva sarà 223 mm.
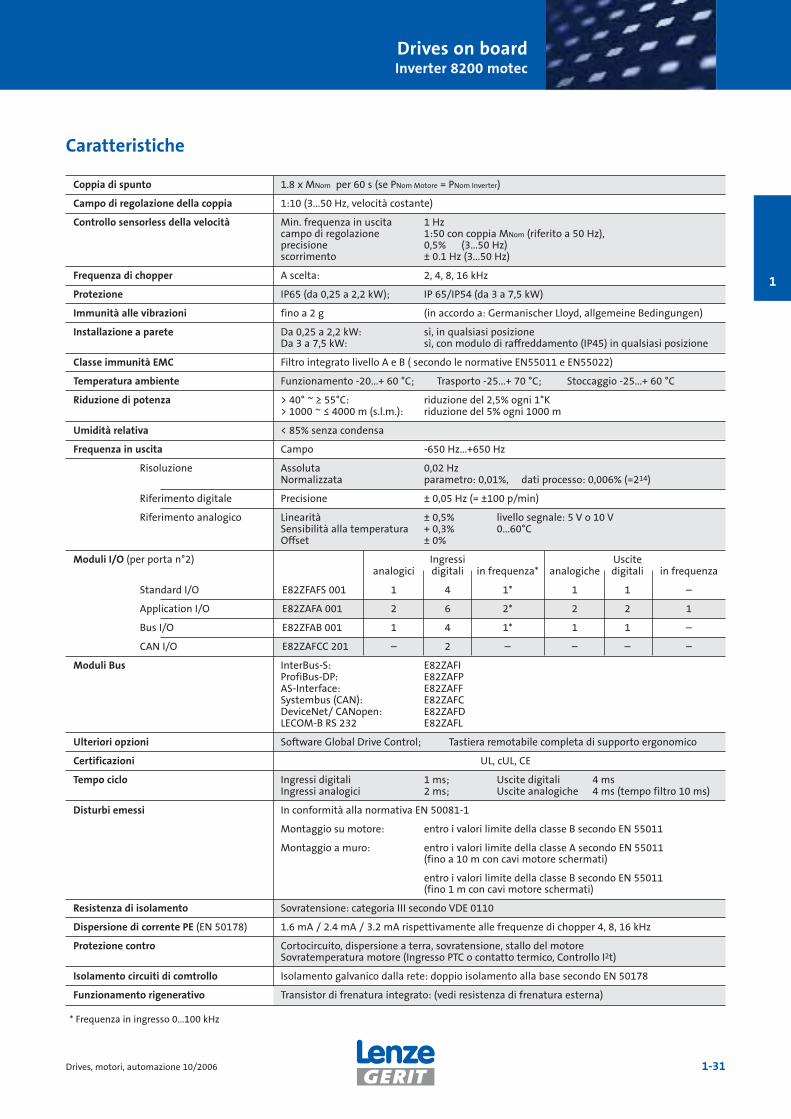
Drives on boardInverter 8200 motec
1
1-31Drives, motori, automazione 10/2006
Coppia di spunto 1.8 x MNom per 60 s (se PNom Motore = PNom Inverter)
Campo di regolazione della coppia 1:10 (3...50 Hz, velocità costante)
Controllo sensorless della velocità Min. frequenza in uscita 1 Hzcampo di regolazione 1:50 con coppia MNom (riferito a 50 Hz),precisione 0,5% (3...50 Hz)scorrimento ± 0.1 Hz (3...50 Hz)
Frequenza di chopper A scelta: 2, 4, 8, 16 kHz
Protezione IP65 (da 0,25 a 2,2 kW); IP 65/IP54 (da 3 a 7,5 kW)
Immunità alle vibrazioni fino a 2 g (in accordo a: Germanischer Lloyd, allgemeine Bedingungen)
Installazione a parete Da 0,25 a 2,2 kW: sì, in qualsiasi posizioneDa 3 a 7,5 kW: sì, con modulo di raffreddamento (IP45) in qualsiasi posizione
Classe immunità EMC Filtro integrato livello A e B ( secondo le normative EN55011 e EN55022)
Temperatura ambiente Funzionamento -20...+ 60 °C; Trasporto -25...+ 70 °C; Stoccaggio -25...+ 60 °C
Riduzione di potenza > 40° ~ ≥ 55°C: riduzione del 2,5% ogni 1°K> 1000 ~ ≤ 4000 m (s.l.m.): riduzione del 5% ogni 1000 m
Umidità relativa < 85% senza condensa
Frequenza in uscita Campo -650 Hz...+650 Hz
Risoluzione Assoluta 0,02 HzNormalizzata parametro: 0,01%, dati processo: 0,006% (=214)
Riferimento digitale Precisione ± 0,05 Hz (= ±100 p/min)
Riferimento analogico Linearità ± 0,5% livello segnale: 5 V o 10 VSensibilità alla temperatura + 0,3% 0...60°COffset ± 0%
Moduli I/O (per porta n°2) Ingressi Usciteanalogici digitali in frequenza* analogiche digitali in frequenza
Standard I/O E82ZFAFS 001 1 4 1* 1 1 –
Application I/O E82ZAFA 001 2 6 2* 2 2 1
Bus I/O E82ZFAB 001 1 4 1* 1 1 –
CAN I/O E82ZAFCC 201 – 2 – – – –
Moduli Bus InterBus-S: E82ZAFIProfiBus-DP: E82ZAFPAS-Interface: E82ZAFFSystembus (CAN): E82ZAFCDeviceNet/ CANopen: E82ZAFDLECOM-B RS 232 E82ZAFL
Ulteriori opzioni Software Global Drive Control; Tastiera remotabile completa di supporto ergonomico
Certificazioni UL, cUL, CE
Tempo ciclo Ingressi digitali 1 ms; Uscite digitali 4 msIngressi analogici 2 ms; Uscite analogiche 4 ms (tempo filtro 10 ms)
Disturbi emessi In conformità alla normativa EN 50081-1
Montaggio su motore: entro i valori limite della classe B secondo EN 55011
Montaggio a muro: entro i valori limite della classe A secondo EN 55011(fino a 10 m con cavi motore schermati)
entro i valori limite della classe B secondo EN 55011(fino 1 m con cavi motore schermati)
Resistenza di isolamento Sovratensione: categoria III secondo VDE 0110
Dispersione di corrente PE (EN 50178) 1.6 mA / 2.4 mA / 3.2 mA rispettivamente alle frequenze di chopper 4, 8, 16 kHz
Protezione contro Cortocircuito, dispersione a terra, sovratensione, stallo del motoreSovratemperatura motore (Ingresso PTC o contatto termico, Controllo I2t)
Isolamento circuiti di comtrollo Isolamento galvanico dalla rete: doppio isolamento alla base secondo EN 50178
Funzionamento rigenerativo Transistor di frenatura integrato: (vedi resistenza di frenatura esterna)
Caratteristiche
* Frequenza in ingresso 0...100 kHz

Drives on boardInverter 8200 motec
1
1-32 Drives, motori, automazione 10/2006
Motec tipo E82MV251-2B E82MV371-2B E82MV551-4B E82MV751-4B E82MV152-4B E82MV222-4B
Potenza motore (4 pol. ASM) PN [kW] 0,25 0,37 0,55 0,75 1,5 2,2
PN [hp] 0,34 0,5 0,75 1,0 2,0 3,0
Alimentazione tensione Vrete [V] 1 x 180 V…264 V ± 0% 3 x 320 V…550 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0% 45 Hz…65 Hz ± 0%
Corrente nominale assorbita Irete [A] 3,4 5,0 1,8 1,4 2,4 1,9 3,8 3,0 5,5 4,5
Dati per differenti alimentazioni VNrete [V] 240 240 400 500 400 500 400 500 400 500
Corrente nom. in (2/4k Hz)* IN24 [A] 2,0 2,9 2,1 1,8 2,5 2,4 4,6 3,9 6,7 5,6uscita alla frequenza
(8 kHz)* IN8 [A] 1,7 2,4 1,8 1,6 2,4 2,1 3,9 3,5 5,6 5,0di commutazione di:(16 kHz)* IN16 [A] 1,1 1,6 1,2 1,1 1,6 1,4 2,5 2,3 3,6 3,2
Corrente max. per (2/4k Hz)* Imax2/4 [A] 2,5 3,6 2,7 2,4 3,6 3,2 5,8 5,2 8,4 7,660 s alla frequenza
(8 kHz)* Imax8 [A] 2,5 3,6 2,7 2,4 3,6 3,2 5,8 5,2 8,4 7,6di commutazione di: (16 kHz)* Imax16 [A] 1,6 1,4 1,8 1,6 2,4 2,1 3,9 3,5 5,3 4,8
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 30 40 35 45 70 95
Peso (solo motec) m [kg] 1,8 1,8 2,8 2,8 4,1 4,1
Dati tecnici: funzionamento gravoso con sovraccarichi fino al 150%
Motec tipo E82MV302-4B E82MV402-4B E82MV552-4B E82MV752-4B
Potenza motore (4 pol. ASM) PN [kW] 3,0 4,0 5,5 7,5
PN [hp] 4,1 5,4 7,5 10,2
Alimentazione tensione Vrete [V] 3 x 320 V - 0 % ... 550 V + 0 %
frequenza frete [Hz] 45 Hz…65 Hz + 0 %
Corrente nominale assorbita Irete [A] 9,5 7,6 12,3 9,8 16,8 13,4 21,5 17,2
Dati per differenti alimentazioni VNrete [V] 400 500 400 500 400 500 400 500
Corrente nom. in (2/4k Hz)* IN24 [A] 8,8 7,0 11,4 9,2 15,6 12,5 16,5 13,2uscita alla frequenza
(8 kHz)* IN8 [A] 7,3 5,8 9,5 7,6 13 10,4 16,5 13,2di commutazione di:(16 kHz)* IN16 [A] 4,7 4,2 6,1 5,5 8,4 7,6 10,7 9,6
Corrente max. per (2/4k Hz)* Imax2/4 [A] 11 8,7 14,2 11,4 19,5 15,6 24,8 19,860 s alla frequenza
8 kHz)* Imax8 [A] 11 8,7 14,2 11,4 19,5 15,6 24,8 19,8di commutazione di:(16 kHz)* Imax16 [A] 7,1 6,4 9,1 8,2 12,7 11,4 16,1 14,5
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 145 180 230 300
Peso (solo motec) m [kg] 9,7 9,7 9,7 9,7
- Dati in grassetto sono relativi ad un funzionamento alla frequenza di chopper standard di 8 kHz.* Frequenza di chopper dell’inverter.

Drives on boardInverter 8200 motec
1
1-33Drives, motori, automazione 10/2006
Dati tecnici, funzionamento con potenza motore incrementata
Motec tipo E82MV E82MV251-2B E82MV371-2B E82MV551-4B E82MV751-4B E82MV152-4B E82MV222-4B
Potenza motore (4 pol. ASM) PN [kW] 0,37 0,55 0,75 1,1 2,2 3,0
PN [hp] 0,5 0,75 1,0 1,5 3,0 4,0
Alimentazione tensione Vrete [V] 1 x 180 V…264 V ± 0% 3 x 320 V…440 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0% 45 Hz…65 Hz ± 0%
Corrente nominale assorbita Irete [A] 4,1 6,0 2,3 2,8 4,6 6,6
Dati per differenti alimentazioni VNrete [V] 240 240 400 500 400 500 400 500 400 500
Corrente nom. (2/4k Hz)* IN24 [A] 2,0 2,9 2,1 - 2,9 - 4,6 - 6,7 -
Corrente max. 60 s (2/4k Hz)* Imax2/4 [A] 2,5 3,6 2,7 - 3,6 - 5,8 - 8,4 -
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 30 40 35 45 70 95
Peso (solo motec) m [kg] 1,8 1,8 2,8 2,8 4,1 4,1
Motec tipo E82MV302-4B E82MV402-4B E82MV552-4B E82MV752-4B
Potenza motore (4 pol. ASM) PN [kW] 4,0 5,5 7,5 7,5
PN [hp] 5,4 7,5 10,2 10
Alimentazione tensione Vrete [V] 320 V - 0 % ... 440 V + 0 %
frequenza frete [Hz] 45 Hz - 0 % … 65 Hz + 0 %
Corrente nominale assorbita Irete [A] 11,4 14,8 20,2 16,5
Dati per differenti alimentazioni VNrete [V] 400 400 400 400
Corrente nom. (2/4k Hz)* IN24 [A] 8,8 11,4 15,6 16,5
Corrente max. 60 s (2/4k Hz)* Imax2/4 [A] 11 14,2 19,5 24,5
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] - - - 300
Peso (solo motec) m [kg] 9,7 9,7 9,7 9,7
- Correnti relative a carichi variabili: 1 minuto di sovracorrente (Imax) oppure 2 minuti al 75 % della corrente nominale IN
* Frequenza di chopper dell’inverter.
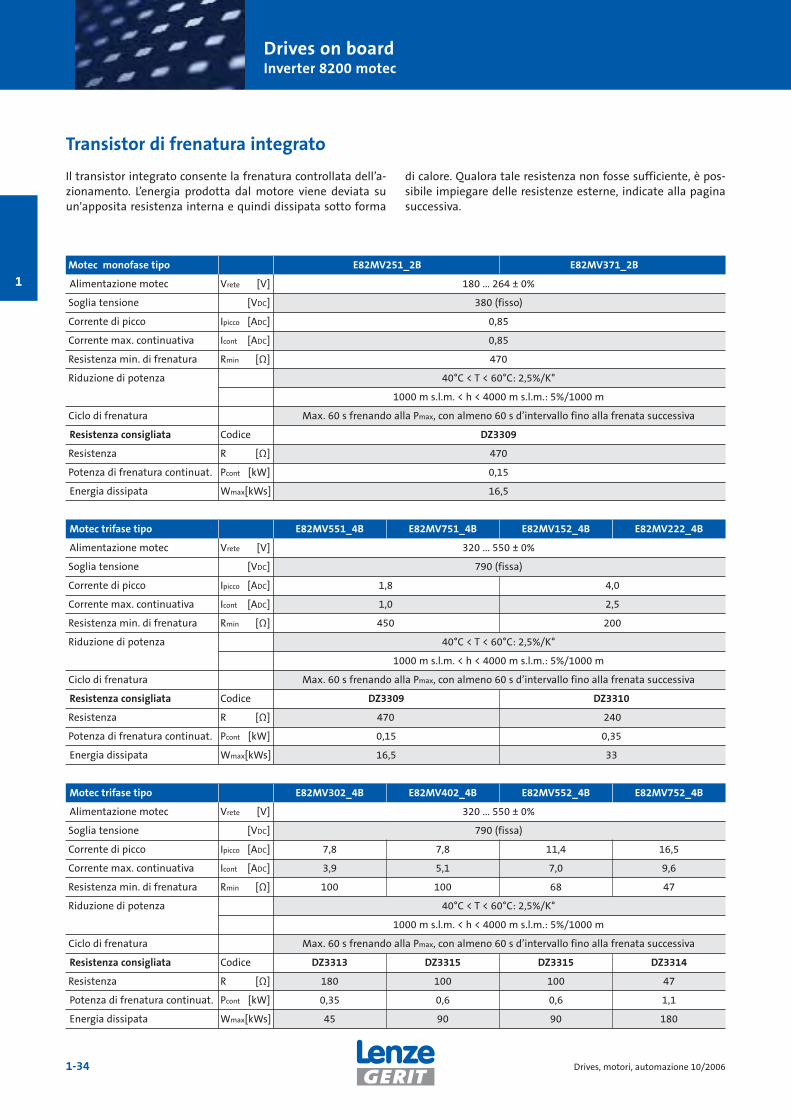
Drives on boardInverter 8200 motec
1
1-34 Drives, motori, automazione 10/2006
Motec monofase tipo E82MV251_2B E82MV371_2B
Alimentazione motec Vrete [V] 180 ... 264 ± 0%
Soglia tensione [VDC] 380 (fisso)
Corrente di picco Ipicco [ADC] 0,85
Corrente max. continuativa Icont [ADC] 0,85
Resistenza min. di frenatura Rmin [Ω] 470
Riduzione di potenza 40°C < T < 60°C: 2,5%/K°
1000 m s.l.m. < h < 4000 m s.l.m.: 5%/1000 m
Ciclo di frenatura Max. 60 s frenando alla Pmax, con almeno 60 s d’intervallo fino alla frenata successiva
Resistenza consigliata Codice DZ3309
Resistenza R [Ω] 470
Potenza di frenatura continuat. Pcont [kW] 0,15
Energia dissipata Wmax[kWs] 16,5
Motec trifase tipo E82MV551_4B E82MV751_4B E82MV152_4B E82MV222_4B
Alimentazione motec Vrete [V] 320 ... 550 ± 0%
Soglia tensione [VDC] 790 (fissa)
Corrente di picco Ipicco [ADC] 1,8 4,0
Corrente max. continuativa Icont [ADC] 1,0 2,5
Resistenza min. di frenatura Rmin [Ω] 450 200
Riduzione di potenza 40°C < T < 60°C: 2,5%/K°
1000 m s.l.m. < h < 4000 m s.l.m.: 5%/1000 m
Ciclo di frenatura Max. 60 s frenando alla Pmax, con almeno 60 s d’intervallo fino alla frenata successiva
Resistenza consigliata Codice DZ3309 DZ3310
Resistenza R [Ω] 470 240
Potenza di frenatura continuat. Pcont [kW] 0,15 0,35
Energia dissipata Wmax[kWs] 16,5 33
Motec trifase tipo E82MV302_4B E82MV402_4B E82MV552_4B E82MV752_4B
Alimentazione motec Vrete [V] 320 ... 550 ± 0%
Soglia tensione [VDC] 790 (fissa)
Corrente di picco Ipicco [ADC] 7,8 7,8 11,4 16,5
Corrente max. continuativa Icont [ADC] 3,9 5,1 7,0 9,6
Resistenza min. di frenatura Rmin [Ω] 100 100 68 47
Riduzione di potenza 40°C < T < 60°C: 2,5%/K°
1000 m s.l.m. < h < 4000 m s.l.m.: 5%/1000 m
Ciclo di frenatura Max. 60 s frenando alla Pmax, con almeno 60 s d’intervallo fino alla frenata successiva
Resistenza consigliata Codice DZ3313 DZ3315 DZ3315 DZ3314
Resistenza R [Ω] 180 100 100 47
Potenza di frenatura continuat. Pcont [kW] 0,35 0,6 0,6 1,1
Energia dissipata Wmax[kWs] 45 90 90 180
Transistor di frenatura integrato
Il transistor integrato consente la frenatura controllata dell’a-zionamento. L’energia prodotta dal motore viene deviata suun'apposita resistenza interna e quindi dissipata sotto forma
di calore. Qualora tale resistenza non fosse sufficiente, è pos-sibile impiegare delle resistenze esterne, indicate alla paginasuccessiva.

Drives on boardAvviatori starttec
1
1-35Drives, motori, automazione 10/2006
Il concetto di "decentramento" sta acquistando un'importanzasempre maggiore in tutti i settori. Oltre alla dislocazione sem-pre più frequente dei componenti di comando e avviamento aldi fuori degli armadi elettrici, l'implementazione di funzionidecentrate, in grado di ridurre il carico sul PLC centrale, hadeterminato il successo dei componenti di azionamentodecentralizzati. Questi sistemi sono, infatti, in grado di offrirela massima flessibilità ed una maggiore redditività degl'im-pianti. Per quanto riguarda l’azionamento di motori e motori-duttori asincroni trifase, spesso non è necessario l’impiego diinverter ma potrebbe essere sufficiente un avviatore soft-start.
A questo proposito Lenze, basandosi sulle esperienzeacquisite con l'inverter 8200 motec ed il know-how maturatonel campo degli azionamenti decentrati, ha dato vita al pro-getto Starttec. È nato così un innovativo avviatore on-board che coniuga lasemplicità di un soft-start con la massima capacità d’integra-zione anche in impianti complessi.
Avviatori starttec0,25...5,5 kW
Decentramento e
innovazione
Perfetta integrazione nei sistemi d’automazione
Economicità˘ un solo modello in due versioni per motori da
0,25 a 5,5 kW˘ abbattimento dell'usura dei componenti meccanici grazie
alla rampa di accelerazione˘ tempi ridotti d’installazione e montaggio˘ riduzione dei costi d'installazione grazie al bus di energia
"main-through"˘ facilità di riattrezzaggio, ad esempio in caso di motori
normalizzati o di montaggio a parete dell'avviatorestarttec
˘ rapida messa in servizio, senza senza dover ricorrere alknow-how di esperti
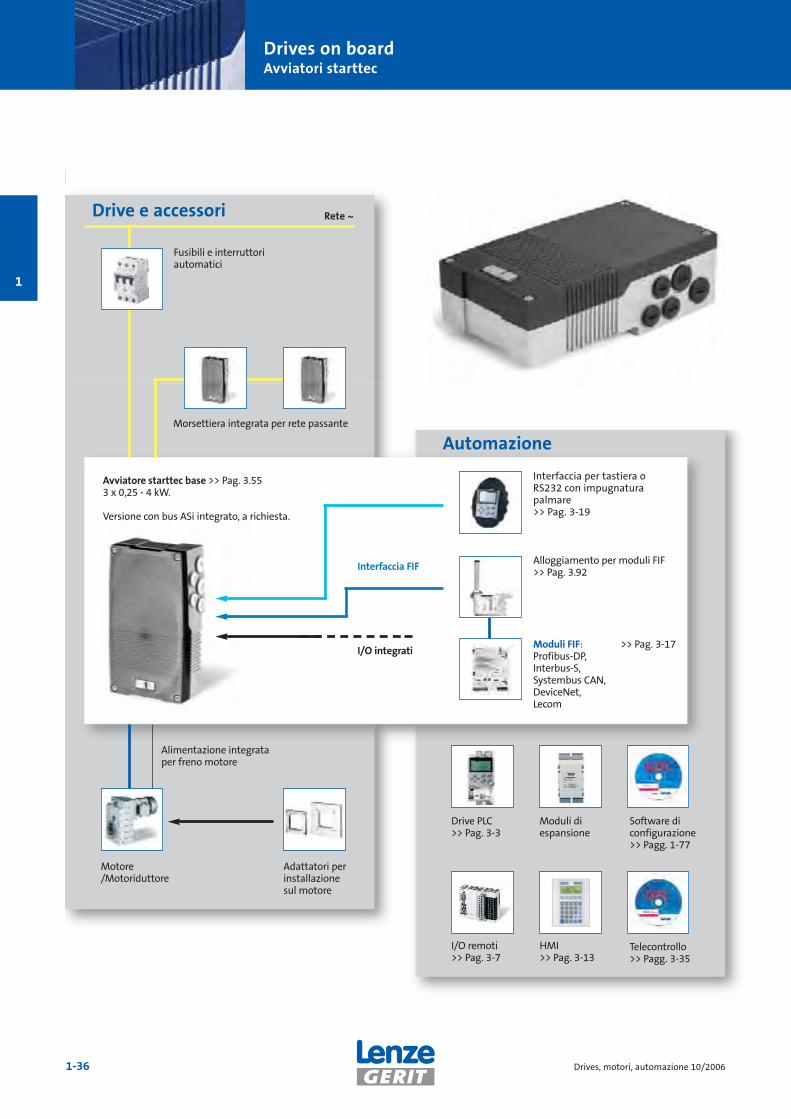
Drives on boardAvviatori starttec
1
1-36 Drives, motori, automazione 10/2006
Fusibili e interruttoriautomatici
Morsettiera integrata per rete passante
Adattatori perinstallazione sul motore
Interfaccia per tastiera oRS232 con impugnaturapalmare >> Pag. 3-19
Moduli FIF: >> Pag. 3-17Profibus-DP, Interbus-S, Systembus CAN,DeviceNet,Lecom
Drive PLC>> Pag. 3-3
I/O remoti>> Pag. 3-7
HMI>> Pag. 3-13
Moduli diespansione
Software di configurazione>> Pagg. 1-77
Telecontrollo>> Pagg. 3-35
Motore/Motoriduttore
Avviatore starttec base >> Pag. 3.55 3 x 0,25 - 4 kW.
Versione con bus ASi integrato, a richiesta.
Alimentazione integrataper freno motore
Interfaccia FIF
I/O integrati
Alloggiamento per moduli FIF >> Pag. 3.92
Drive e accessori
Automazione
Rete ~

Drives on boardAvviatori starttec
1
1-37Drives, motori, automazione 10/2006
Molteplici possibilità d'impiego
Azionamenti collegati alla rete tramite bus di energia e di cam-po, ad esempio con comando tramite PROFIBUS-DP:˘ riduzione del cablaggio con "loop-through"˘ accesso ottimale, grazie al montaggio a parete˘ sicurezza del funzionamento con segnalazione guasti, ad
esempio in caso di mancanza rete
Singolo azionamento configurato come sistema modularecompleto (starttec + motore + riduttore), ad esempio con comando tra-mite interfaccia ASi:˘ riduzione dell’usura delle parti meccaniche grazie alla
rampa di accelerazione regolabile˘ protezione sovraccarico del motore ˘ rotazione oraria / antioraria (opzionale)
Gli avviatori Starttec sono disponibili in due versioni: tipo 1 etipo 2. Il modello tipo 1 consente il comando di un singolomotore, caratteristiche:˘ avvio e arresto del motore tramite segnale di comando o
bus (es.: AS interface)˘ tempi di accelerazione regolabili˘ protezione del motore integrata con rilevamento di
sovraccarichi e sovratemperatura (PTC / termocontatto)˘ struttura robusta con grado di protezione IP 65/NEMA 4 ˘ massima accessibilità, grazie alla possibilità di montaggio
a parete o direttamente sul motore˘ indipendenza termica˘ messa in servizio rapida e semplice˘ indicatori di stato a LED.
Singoli azionamenti, ad esempio con comando tramite ingressi digitali per:˘ comando freno motore integrato (opzionale)˘ comando di 2 motori in parallelo (opzionale) ˘ azionamento sul posto tramite tastiera
Motec + Starttec
L’abbinamento con gli inverter vettoriali “on-board” MotecLenze consente di realizzare sistemi decentrati complessi,caratterizzati dalla massima integrazione versatilità ed econo-micità.
˘ massima disponibilità degli impianti, grazie alla funzionedi reset guasti e azionamento manuale sul posto tramitetastiera
In aggiunta, oltre alle caratteristiche menzionate, il modellotipo 2 offre:˘ possibilità di comando di due motori in parallelo˘ cambio del senso di rotazione˘ comando freno motore, integrato nello Starttec, con
ritardo regolabile, e conseguente alleggerimento del caricosul PLC.
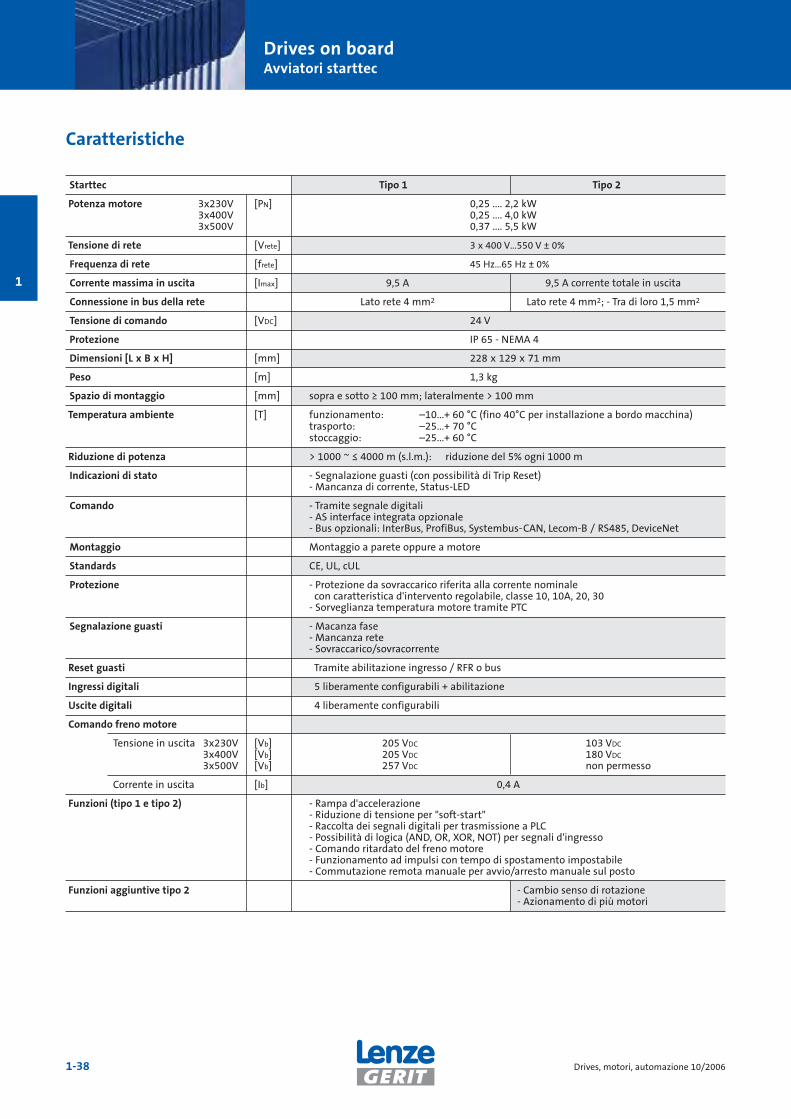
Drives on boardAvviatori starttec
1
1-38 Drives, motori, automazione 10/2006
Caratteristiche
Starttec Tipo 1 Tipo 2
Potenza motore 3x230V [PN] 0,25 .... 2,2 kW3x400V 0,25 .... 4,0 kW3x500V 0,37 .... 5,5 kW
Tensione di rete [Vrete] 3 x 400 V…550 V ± 0%
Frequenza di rete [frete] 45 Hz…65 Hz ± 0%
Corrente massima in uscita [Imax] 9,5 A 9,5 A corrente totale in uscita
Connessione in bus della rete Lato rete 4 mm2 Lato rete 4 mm2; - Tra di loro 1,5 mm2
Tensione di comando [VDC] 24 V
Protezione IP 65 - NEMA 4
Dimensioni [L x B x H] [mm] 228 x 129 x 71 mm
Peso [m] 1,3 kg
Spazio di montaggio [mm] sopra e sotto ≥ 100 mm; lateralmente > 100 mm
Temperatura ambiente [T] funzionamento: –10...+ 60 °C (fino 40°C per installazione a bordo macchina)trasporto: –25...+ 70 °Cstoccaggio: –25...+ 60 °C
Riduzione di potenza > 1000 ~ ≤ 4000 m (s.l.m.): riduzione del 5% ogni 1000 m
Indicazioni di stato - Segnalazione guasti (con possibilità di Trip Reset)- Mancanza di corrente, Status-LED
Comando - Tramite segnale digitali- AS interface integrata opzionale- Bus opzionali: InterBus, ProfiBus, Systembus-CAN, Lecom-B / RS485, DeviceNet
Montaggio Montaggio a parete oppure a motore
Standards CE, UL, cUL
Protezione - Protezione da sovraccarico riferita alla corrente nominale con caratteristica d'intervento regolabile, classe 10, 10A, 20, 30
- Sorveglianza temperatura motore tramite PTC
Segnalazione guasti - Macanza fase- Mancanza rete- Sovraccarico/sovracorrente
Reset guasti Tramite abilitazione ingresso / RFR o bus
Ingressi digitali 5 liberamente configurabili + abilitazione
Uscite digitali 4 liberamente configurabili
Comando freno motore
Tensione in uscita 3x230V [Vb] 205 VDC 103 VDC
3x400V [Vb] 205 VDC 180 VDC
3x500V [Vb] 257 VDC non permesso
Corrente in uscita [Ib] 0,4 A
Funzioni (tipo 1 e tipo 2) - Rampa d'accelerazione- Riduzione di tensione per "soft-start"- Raccolta dei segnali digitali per trasmissione a PLC- Possibilità di logica (AND, OR, XOR, NOT) per segnali d'ingresso- Comando ritardato del freno motore- Funzionamento ad impulsi con tempo di spostamento impostabile- Commutazione remota manuale per avvio/arresto manuale sul posto
Funzioni aggiuntive tipo 2 - Cambio senso di rotazione- Azionamento di più motori

DrivesInverter 9300 vector
1
1-39Drives, motori, automazione 10/2006
Inverter 9300 vector0,37...500 kW
Funzioni standard˘ controllo vettoriale sensorless˘ protezione contro cortocircuito˘ circuito di riavvio al volo˘ oscilloscopio˘ motopotenziometro˘ setpoint bipolare˘ ingressi ed uscite liberamente configurabili˘ uscita per segnale d’errore˘ frenatura DC˘ compensazione dello scorrimento˘ frequenze Skip˘ controllo PID˘ memorizzazione di 4 set di parametri˘ controllo mancanza rete˘ ingresso digitale in frequenza˘ blocchi funzione ed aritmetici liberamente configurabili˘ CANopen integrato
La serie 9300 vector rappresenta l’attuale vertice della tecno-logia inverter ed è in grado d’offrire eccellenti caratteristichedi controllo e la massima versatilità in ogni tipo di applicazio-ne. Grazie alla loro eccellente capacità di regolazione con control-lo vettoriale sensorless o con retroazione da encoder, questiinverter costituiscono la soluzione ideale in tutte le applica-zioni che necessitano di un elevato livello qualitativo di pro-duzione e processo. L’ampia gamma di moduli di comunicazione e di moduliaccessori (in comune con i servoinverter Serie 9300) assicurauna perfetta integrazione nel sistema di automazione del-l’impianto.
Inverter vettoriali ad alte prestazioni

DrivesInverter 9300 vector
1
1-40 Drives, motori, automazione 10/2006
Automazione
Drive PLC>> Pag. 3-3
I/O remoti>> Pag. 3-7
HMI>> Pag. 3-13
Moduli diespansione
Software di configurazione>> Pagg. 1-77
Telecontrollo>> Pagg. 3-35
Chopper e resistenze di frenatura>> Pag. 1-91
Drives e accessori
Motore/Motoriduttore
Filtro motore a richiesta
Alimentatoricon o senzarecupero inrete>> Pag. 1-84
Interruttori automatici,fusibili, sezione cavi >> pag. 1-96
Rete ~
= DC bus
Filtri di retee filtri RFI>> Pag. 1-87
Inverter 9300 vector base >> Pag. 1-44 0,37 - 400 kW
Systembus CAN integrato
I/O digitali e analogici integrati
Moduli AIF: >> Pag. 3-17 Profibus-DP, Interbus-S, DeviceNet,Lecom
Tastiera
Interfaccia AIF

DrivesInverter 9300 vector
1
1-41Drives, motori, automazione 10/2006
UniversalitàQuesta serie, è universalmente impiegabile per via dell’ali-mentazione trifase (da 320 a 528 V 50/60 Hz) oppure da (460a 760 V) a corrente continua e alla costruzione in ottempe-ranza alle normative CE e UL.La gamma di potenze va da 0,37 a 500 kW.Varianti disponibili: variante rete IT
variante safety lookvariante cold plate
FunzionamentoControllo vettoriale sensorless o con retroazione da encoderincrementale 5 V TTL Line Drive.
Menù utenteLa possibilità di configurare il numero e la sequenza dei codi-ci da parametrizzare rende estremamente semplice l’operati-vità del sistema. Pertanto anche personale non specializzatoè in grado di ottimizzare le funzioni della macchina sul posto.
Ingressi e uscite configurabiliSono disponibili due ingressi e uscite analogiche.Un’uscita digitale 0 – 500 kHz (encoder simulato).Un ingresso digitale per la retroazione da encoder (0 ... 500 kHz, 5 V TTL).Un ingresso digitale 0 – 500 kHz (riferimento in frequenza).Cinque ingressi e un interrupt, quattro uscite digitali PLC com-patibili che possono essere ampliate collegando un moduloI/O al nodo Can Bus.
Controllo mancanza rete (M-Fail) Quest’ultima funzione, permette in caso d’interruzione dellarete, che l’energia cinetica venga utilizzata dagl'inverter perdecelerare e arrestare in modo controllato la macchina.
Diagnosis
Diagnosis
Parameter menu
Speed controller
Torque control
Frequency set value - Master
Frequency set value - Slave line
Frequency set value - Slave cascade
Actual setting
Configurationspeed mode
Motor typeMDSKS056 - 23 - 150
TrasducerRSx (resolver)
Configuration 93xx
Short commissioning
Menù per l’inserimento dati
X8
RFG
X6 X9 X10
X8
X9 X10
X8
X9 X10
ϕ, n, - controllore
Master Slave 1 Slave 2
Encoder Encoder Encoder
ϕ, n, - controlloreϕ, n, - controllore
Fattore Fattore
Configurazione di un sincronismo in asseelettrico in serie (linee rosse) o in parallelo(linee tratteggiate)
Il sincronismo digitale trova innumerevoliapplicazioni:
– linee di estrusione di materie plastiche, l’allungamento del materiale viene impostato tramite il fattore di riduzione
– trasporto di materiale a basso coefficiente di stiro
– linee di imbottigliamento– linee nastratura per cavi– impianti tessili
Sicurezza integrataLa funzione di scollegamento sicuro del motore (variante“safety lock”) che impedisce un riavvio indesiderato in caso dierrore, può essere integrata nell’inverter. Rispetto ai sistemitradizionali, questa soluzione risulta particolarmente efficaceed economica. L’interruzione dell’alimentazione del motoreviene realizzata internamente, tra la logica di controllo e lasezione di potenza. Si eliminano cablaggi aggiuntivi e l’instal-lazione di antieconomici teleruttori, inoltre, si ha la certezzain una piena conformità ai requisiti della categoria di control-lo 3 della normativa EN 954 parte 1 e 2 (dal 01.01.2007: EN ISO13849).

DrivesInverter 9300 vector
1
1-42 Drives, motori, automazione 10/2006
Shielding of all unassigned connection
FB editor - CONVAD1
Diagnostics
alphabetical
process
Sorting
all avaiable
only used
Function blocks
Connect: "ASW1-OUT2 —> Select marked FB input
CONV4CONV5CONVAD1CONVAD2
CONVAPH1CONVAPH2
FB name
123? I ? I
? I
ASW1-OUT
0
1
2
3
4
5
6
IN
CONVAD1 - Converter
Esempi di collegamento dei blocchi funzione: nodo di collegamento
C0601/1
C0601/2
C0602/1
C0602/2
ARIT2-IN2
x
y
C0600
+ – x
/ x/ (1-y)
200%
Configurazione Codice/i Funzioni Nome uscita codice/i visualizzato
ARIT2
ARIT2-Out
ARIT2-IN1
AIN2-OUT
C0408
C0409/2
AIN2-GAIN
C0407
C0409/1
AIN2-OFFSET
AIN2
NomeFB
Nomeingresso
Parametrizzazionecodice/i
NomeFB
Nome uscitaCodicevisualizzato
Nomeingresso
3
4
C0026/2
C0027/2
Configurazionecodice
C0432
C0434/2
AOUT1-OFFSET
C0433
C0434/3
AOUT1-GAIN
AOUT2
NomeFB
Codicevisualizzato
C0026/2
C0027/2
Configurazionecodice
C0431
C0431
AOUT1-IN62
Esempio di configurazione dei blocchi funzione:
– ingressi– blocco aritmetico– uscite
Blocchi funzione e blocchi aritmeticiOgni applicazione richiede una specifica configurazione o pro-gramma. Per soddisfare questa esigenza, gli inverter serie9300 vector, unici nel loro genere, dispongono di numerosiblocchi funzione e aritmetici liberamente configurabili dall’u-tente mediante dei codici. É pertanto possibile costruire all’in-terno dell’inverter molte delle funzioni che fino ad oggi eranodelegate a PLC, o a schede elettroniche dedicate, determinan-do un concreto risparmio. Ad esempio si possono costruirealgoritmi per ottimizzare un ballerino, una cella di carico o uncalcolatore di diametro. Un ulteriore vantaggio offerto dallaconfigurazione individuale è la massima riservatezza dell’ap-plicazione, cioè l’impossibilità da parte di alcuno di sfruttare lasoluzione adottata.
Controllo vettorialeIl controllo vettoriale (ad orientamento di campo) sviluppatoda Lenze per gli inverter serie 9300 offre prestazioni estrema-mente interessanti ed un ampio campo di regolazione dellacoppia e della velocità del motore. Nelle applicazioni più sem-plici, è comunque possibile selezionare un funzionamento concaratteristica vettoriale, lineare V/F oppure quadratica. Nelgrafico a piè di pagina è evidenziato l'andamento della coppia,
su quattro quadranti, in funzione del tipo di funzionamento edella retroazione scelta. Gli inverter serie 9300-EV garantisco-no un vasto campo di regolazione della velocità (> 1:100, senza retroazione - > 1:1000, con retroazione) e dellacoppia (> 1:10, senza retroazione - > 1:20, con retroazione). Lacoppia di spunto raggiunge il 150% del valore nominale.

DrivesInverter 9300 vector
1
1-43Drives, motori, automazione 10/2006
Impianti di estrusioneGli estrusori necessitano di azionamenti concaratteristiche elevate, es.: alte coppied'avviamento, ampio campo di variazione dellavelocità, massima uniformità di rotazione.L'inverter 9300 vector offre i seguenti vantaggi:– Coppie d'avviamento fino al 150% Mnom– Campo di regolazione della velocità > 1:1000– Campo di regolazione della coppia > 1:20
Avvolgitori/svolgitoriI sistemi di controllo della velocità di avvolgitori e svolgitorisono sezioni vitali di moltissimi processi produttivi. Inquesto esempio, la sezione alimentatrice e quellaavvolgitrice sono comandate da un ballerino. Il controllo aballerino è in grado di compensare le fluttuazioni dovute almateriale od al processo di trasformazione, quali:allungamenti, restringimenti e rottura del materiale.
Funzioni disponibili:– Calcolatore diametro – Controllo mancanza rete– Controllo frenatura
Albero d'uscita
Uscita estrusore
Sistemaplanetario
Svolgitore
Ballerino
Avvolgitore
Taglierinalineare
Spreader
DosatoriNei sistemi di dosaggio, due o più componenti devono essere miscelati con rapportiprestabiliti. Questa procedura può essere sia periodica che continua.Funzioni disponibili • regolazione della quantità• richiamo di quantità memorizzate• albero elettrico incorporato: regolazione dei rapporti• regolazione del dosaggio, tempo/quantitàIn applicazioni di dosatori multipli, in caso d'interruzione improvvisa, l'inverter9300 mantiene in memoria le quantità già miscelate!

DrivesInverter 9300 vector
1
1-44 Drives, motori, automazione 10/2006
Coppia di spunto 1.5 x MNom (60 s) se: potenza nominale inverter = potenza nominale motore
Campo di regolazione della coppia 1:10 (3...50 Hz, velocità costante); 1:20 con retroazione
Controllo sensorless della velocità velocità min. motore 1% (0...MN)campo di regolazione 1:100 con coppia MNom (riferito a 50 Hz),precisione 0,5% (3...50 Hz)
Controllo della velocità con retroazione velocità min. motore 0% (0...MN)campo di regolazione 1:1000 con coppia MNom (riferito a 50 Hz),precisione 0,1% (3...50 Hz)
Frequenza di chopper a scelta 1, 2 o 4 kHz
Temperatura ambiente funzionamento: –10...+ 50 °C (> 40°C con riduzione di potenza)trasporto: –25...+ 70 °Cstoccaggio: –20...+ 60 °C
Altitudine s.l.m. 0...4000 m
Riduzione di potenza > 40° - ≥ 50°C: riduzione del 2,5% ogni 1°K> 1000 - ≤ 4000 m (s.l.m.): riduzione del 5% ogni 1000 m
Protezione IP20
Immunità alle vibrazioni fino a 0,7 g (in accordo a: Germanischer Lloyd, allgemeine Bedingungen)
EMC secondo EN62800-3/A11
Emissione disturbi secondo classe A EN5501, solo con filtro RFI integrato (opzionale)
Condizioni ambientali Classe 3K3 secondo EN 50178 (umidità relativa < 85% senza condensa)
Protezione IP20 standardconformi alle normative: EN 50081-1/2, IEC 22G-WG4 (Cv) 21
Immunità ai radiodisturbi Conformità alle normative: EN 50082-2, IEC 22G-WG4 (Cv) 21
Normativa Standard SeveritàESD EN61000-4-2 3, i.e. 8 kV con dissipazione ad aria
e 6 kV con dissipazione per contattoline- bound RF interferenze EN61000-4-6 150 kHz...80 MHz, 10 V/m, 80%AM (1 kHz)RF-field (housing) EN61000-4-3 80 MHz...1000 MHz, 10 V/m, 80%AM (1 kHz)RF-field burst EN61000-4-4 3/4, i.e. 2 kV / 5 kHzSorgente (tensione pulsantesui cavi d’alimentazione) IEC 1000-4-5 3, i.e. 1,2/50 ms, 1kV fase-fase, 2kV fase-PE
Certificazioni CE (bassa tensione)UL 508 / UL 508C (equipaggiamenti industriali di controllo e di potenza)
Moduli alimentatori A recupero d’energia Modulo 9341: 5,5 kWModulo 9342: 11,0 kWModulo 9343: 22,0 kW
Senza recupero d’energia Modulo 9364: 55 kWModulo 9365: 110 kW
Modulo di frenatura con Modulo 9351resistenza di frenatura [Ω] 47 Ω interna
Chopper di frenatura Chopper 9352resistenze di frenatura [Ω] 18 Ω min. esterna
Moduli d’automazione CanBus: Integrato nell’azionamentoRS 232/485: EMF2102IB-V001RS 485: EMF2102IB-V002RS 232/485: EMF2102IB-V003 (fibra ottica)InterBus-S: EMF2113IBProfiBus-DP: EMF2133IBDeviceNet: EMF2175IB
Modulo tastiera EMZ9371BB
Modulo espansione terminali I/O Vedere programma I/O via CAN
Caratteristiche

DrivesInverter 9300 vector
1
1-45Drives, motori, automazione 10/2006
➀ Impiegando lunghi cavi di collegamento, occorre considerare anche la resistenza dei cavi stessi, che può avere un effetto notevole sulla resistenzatotale
➁ L’apparecchiatura è composta da due unità (1145 x 500 x 436 mm), master e slave, collegate in parallelo (alimentazione CD). Normalmente occorre impiegare una resistenza per l’unità master ed una per l’unità slave
Tipo EVF9335-EV EVF9336-EV EVF9337-EV EVF9338-EV
Soglia tensione [VDC] 680
Corrente di picco Imax [ADC] 315 375 450 560
Corrente max. continuativa Icont [ADC] 210 250 300 375
Resistenza minima di frenatura Rmin [Ω] 1,14 1,14 1,14 0,85
Riduzione di potenza 40°C < T < 60°C: 2%/K°
1000 m s.l.m. < h < 4000 m s.l.m.: 5%/1000 m
Ciclo di frenatura Max. 60 s frenando alla Pmax, con almeno 60 s d’intervallo fino alla frenata successiva
Tipo EVF9381-EV ➁ EVF9382-EV ➁ EVF9383-EV ➁
Soglia tensione [VDC] 680
Corrente di picco Imax [ADC] 2 x 375 2 x 450 2 x 560
Corrente max. continuativa Icont [ADC] 2 x 250 2 x 300 2 x 375
Resistenza minima di frenatura Rmin [Ω] 1,14 1,14 0,85
Riduzione di potenza 40°C < T < 60°C: 2%/K°
1000 m s.l.m. < h < 4000 m s.l.m.: 5%/1000 m
Ciclo di frenatura Max. 60 s frenando alla Pmax, con almeno 30 s d’intervallo fino alla frenata successiva
Dati tecnici
Transistor di frenatura integrato
Gli inverter 9300 vector, con potenza sopra i 110 kW, a richie-sta, possono essere forniti completi di un transistor di frenatu-ra integrato. Per la frenatura dei modelli più piccoli sono dispo-nibili appositi moduli riportati nella sezione 3: Accessori.Il transistor integrato consente una frenatura controllata dell’azionamento. L’energia prodotta dal motore viene deviatasu apposite resistenze esterne e quindi dissipata sotto formadi calore.
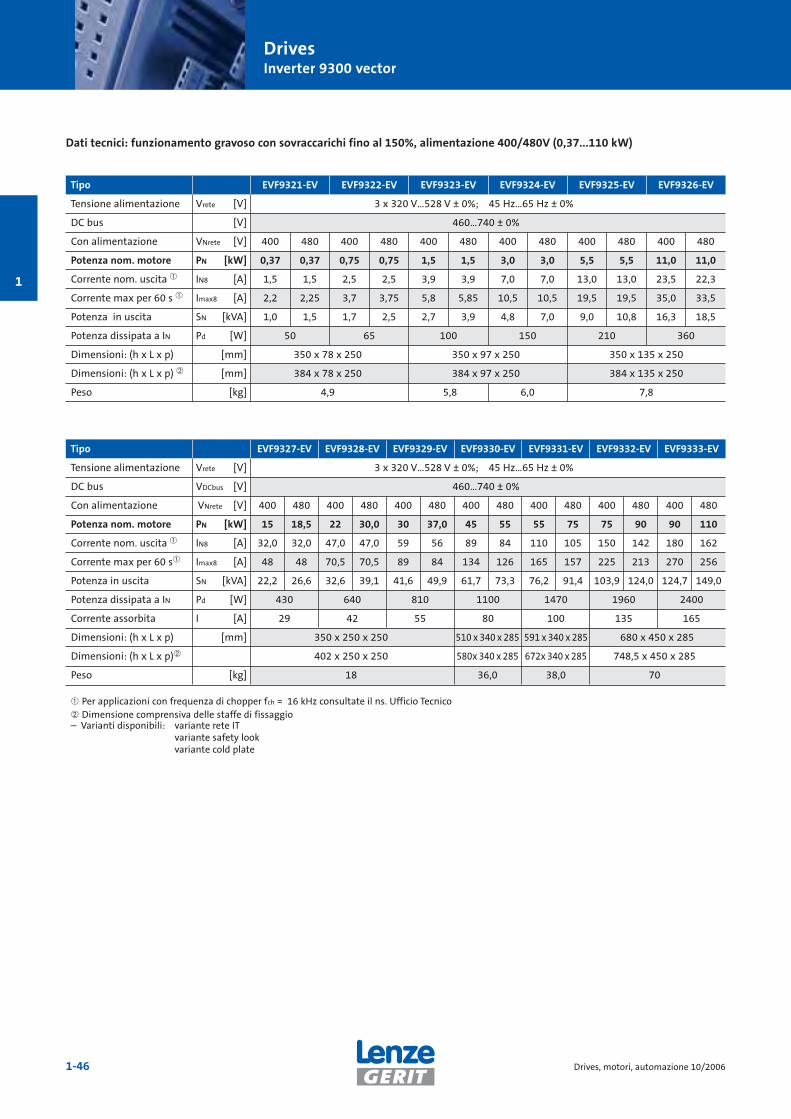
DrivesInverter 9300 vector
1
1-46 Drives, motori, automazione 10/2006
Dati tecnici: funzionamento gravoso con sovraccarichi fino al 150%, alimentazione 400/480V (0,37...110 kW)
➀ Per applicazioni con frequenza di chopper fch = 16 kHz consultate il ns. Ufficio Tecnico➁ Dimensione comprensiva delle staffe di fissaggio– Varianti disponibili: variante rete IT
variante safety lookvariante cold plate
Tipo EVF9321-EV EVF9322-EV EVF9323-EV EVF9324-EV EVF9325-EV EVF9326-EV
Tensione alimentazione Vrete [V] 3 x 320 V…528 V ± 0%; 45 Hz…65 Hz ± 0%
DC bus [V] 460…740 ± 0%
Con alimentazione VNrete [V] 400 480 400 480 400 480 400 480 400 480 400 480
Potenza nom. motore PN [kW] 0,37 0,37 0,75 0,75 1,5 1,5 3,0 3,0 5,5 5,5 11,0 11,0
Corrente nom. uscita ➀ IN8 [A] 1,5 1,5 2,5 2,5 3,9 3,9 7,0 7,0 13,0 13,0 23,5 22,3
Corrente max per 60 s ➀ Imax8 [A] 2,2 2,25 3,7 3,75 5,8 5,85 10,5 10,5 19,5 19,5 35,0 33,5
Potenza in uscita SN [kVA] 1,0 1,5 1,7 2,5 2,7 3,9 4,8 7,0 9,0 10,8 16,3 18,5
Potenza dissipata a IN Pd [W] 50 65 100 150 210 360
Dimensioni: (h x L x p) [mm] 350 x 78 x 250 350 x 97 x 250 350 x 135 x 250
Dimensioni: (h x L x p) ➁ [mm] 384 x 78 x 250 384 x 97 x 250 384 x 135 x 250
Peso [kg] 4,9 5,8 6,0 7,8
Tipo EVF9327-EV EVF9328-EV EVF9329-EV EVF9330-EV EVF9331-EV EVF9332-EV EVF9333-EV
Tensione alimentazione Vrete [V] 3 x 320 V…528 V ± 0%; 45 Hz…65 Hz ± 0%
DC bus VDCbus [V] 460…740 ± 0%
Con alimentazione VNrete [V] 400 480 400 480 400 480 400 480 400 480 400 480 400 480
Potenza nom. motore PN [kW] 15 18,5 22 30,0 30 37,0 45 55 55 75 75 90 90 110
Corrente nom. uscita ➀ IN8 [A] 32,0 32,0 47,0 47,0 59 56 89 84 110 105 150 142 180 162
Corrente max per 60 s➀ Imax8 [A] 48 48 70,5 70,5 89 84 134 126 165 157 225 213 270 256
Potenza in uscita SN [kVA] 22,2 26,6 32,6 39,1 41,6 49,9 61,7 73,3 76,2 91,4 103,9 124,0 124,7 149,0
Potenza dissipata a IN Pd [W] 430 640 810 1100 1470 1960 2400
Corrente assorbita I [A] 29 42 55 80 100 135 165
Dimensioni: (h x L x p) [mm] 350 x 250 x 250 510 x 340 x 285 591 x 340 x 285 680 x 450 x 285
Dimensioni: (h x L x p)➁ 402 x 250 x 250 580x 340 x 285 672x 340 x 285 748,5 x 450 x 285
Peso [kg] 18 36,0 38,0 70

DrivesInverter 9300 vector
1
1-47Drives, motori, automazione 10/2006
Dati tecnici: funzionamento con potenza motore incrementata, alimentazione 400 V (0,55...110 kW)
Tipo EVF9321-EV EVF9322-EV EVF9323-EV EVF9324-EV EVF9325-EV EVF9326-EV
Tensione alimentazione Vrete [V] 3 x 320 V…528 V ± 0%; 45 Hz…65 Hz ± 0%
DC bus VDCbus [V] 460…620 ± 0%
Con alimentazione VNrete [V] 400 400 400 400 400 400
Potenza nom. motore PN [kW] 0,55 1,1 2,2 4,0 7,5 11,0
Corrente nom. uscita ➀ IN8 [A] 1,8 3,0 5,5 9,4 16,0 23,5
Corrente max per 60 s ➀ Imax8 [A] 2,2 3,7 5,8 10,5 19,5 35,0
Potenza in uscita SN [kVA] 1,3 2,1 3,8 6,5 11,1 16,3
Potenza dissipata a IN Pd [W] 50 65 100 150 210 360
Dimensioni: (h x L x p) [mm] 350 x 78 x 250 350 x 97 x 250 350 x 135 x 250
Dimensioni: (h x L x p) ➁ [mm] 384 x 78 x 250 384 x 97 x 250 384 x 135 x 250
Peso [kg] 4,9 5,8 6 7,8
➀ Dati relativi ad una frequenza di chopper fino a 8 kHz, consultate il ns. Ufficio Tecnico per applicazioni con frequenza di 16 kHz.➁ Dimensione comprensiva delle staffe di fissaggio.– Varianti disponibili: variante rete IT
variante safety lookvariante cold plate
Tipo EVF9327-EV EVF9328-EV EVF9329-EV EVF9330-EV EVF9331-EV EVF9332-EV EVF9333-EV
Tensione alimentazione Vrete [V] 3 x 320 V…440 V ± 0%; 45 Hz…65 Hz ± 0%
DC bus VDCbus [V] 460…620 ± 0%
Con alimentazione VNrete [V] 400 400 400 400 400 400 400
Potenza nom. motore PN [kW] 22 30 37,5 55 75 90 110
Corrente nom. uscita ➀ IN8 [A] 43 52 66 93 132 159 205
Corrente max per 60 s➀ Imax8 [A] 48 70,5 89 134 165 225 270
Potenza in uscita SN [kVA] 29,8 39,5 46,4 74,8 91,5 110 142
Potenza dissipata a IN Pd [W] 430 640 810 1100 1470 1960 2400
Corrente assorbita I [A] 29 42 55 80 100 135 165
Dimensioni: (h x L x p) [mm] 350 x 250 x 250 510 x 340 x 285 591 x 340 x 285 680 x 450 x 285
Dimensioni: (h x L x p)➁ 402 x 250 x 250 672x 340 x 285 673x 340 x 285 748,5 x 450 x 285
Peso [kg] 18 36,0 38,0 70

DrivesInverter 9300 vector
1
1-48 Drives, motori, automazione 10/2006
Dati tecnici: funzionamento gravoso con sovraccarichi fino al 150%, alimentazione 400 V (110...500 kW)
** Per applicazioni con frequenza di chopper differente consultate il ns. Ufficio Tecnico➀ L’apparecchiatura è composta da due unità (1145 x 500 x 436 mm) collegate in parallelo (alimentazione DC).
Queste unità devono essere installate a 50 mm.– Varianti disponibili: EVFxxxx-EVV030 con filtro RFI classe A integrato
EVFxxxx-EVV060 con transistor di frenatura integratoEVFxxxx-EVV110 con filtro RFI classe A e transistor di frenatura integrati
Tipo EVF9335-EV EVF9336-EV EVF9337-EVE VF9338-EV
Alimentazione versione 400 V Vrete [V] 3 x 340 V…456 V ± 0% (45 Hz…65 Hz ± 0%)
versione 500 V Vrete [V] 3 x 340 V…577 V ± 0% (45 Hz…65 Hz ± 0%)
Dati per alimentazione a Vrete [V] 400 500 400 500 400 500 400 500
Corrente nominale assorbita Irete [A] 200 200 238 238 285 285 356 356
Potenza motore (4 poli ASM) PN [kW] 110 132 132 160 160 200 200 250
Potenza in uscita (2 kHz)* SN2 [kWA] 145 - 173 - 207 - 259 -
Corrente nom uscita alla (1 kHz)* IN1 [A] 210 250 300 375frequenza di
(2 kHz)* IN2 [A] 210 250 300 375commutazione di:(4 kHz)* IN4 [A] 210 250 250 300
Corrente max uscita alla (1 kHz)* Imax1 [A] 315 375 450 560frequenza di
(2 kHz)* Imax2 [A] 315 375 450 560commutazione di:(4 kHz)* Imax4 [A] 315 375 375 450
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN PV [kW] 2,8 3,3 4 5
Dimensioni: (h x L x p) ➀ [mm] 1145 x 500 x 436 1145 x 500 x 436 1145 x 500 x 436 1145 x 500 x 436
Peso m [kg] 160 160 160 200
Tipo EVF9381-EV EVF9382-EV EVF9383-EV
Alimentazione versione 400 V Vrete [V] 3 x 340 V…456 V ± 0% (45 Hz…65 Hz ± 0%)
versione 500 V Vrete [V] 3 x 340 V…577 V ± 0% (45 Hz…65 Hz ± 0%)
Dati per alimentazione a Vrete [V] 400 500 400 500 400 500
Corrente nominale assorbita Irete [A] 475 475 570 570 713 713
Potenza motore (4 poli ASM) PN [kW] 250 315 315 400 400 500
Potenza in uscita (2 kHz)* SN2 [kWA] 346 - 415 - 519 -
Corrente nom uscita alla (1 kHz)* IN1 [A] 500 600 750frequenza di
(2 kHz)* IN2 [A] 500 600 750commutazione di:(4 kHz)* IN4 [A] 500 500 600
Corrente max uscita alla (1 kHz)* Imax1 [A] 750 900 1125frequenza di
(2 kHz)* Imax2 [A] 750 900 1125commutazione di:(4 kHz)* Imax4 [A] 750 750 900
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN PV [kW] 6,6 8,0 10
Dimensioni: (h x L x p) ➀ [mm] 1145 x 1050 x 436 1145 x 1050 x 436 1145 x 1050 x 436
Peso m [kg] 320 320 400

DrivesServoinverter 9300
1
1-49Drives, motori, automazione 10/2006
Servo 93000,37...75 kW
La scelta d’eccellenza
Prestazioni e flessibilità
L’eccellente sistema di controllo della qualità che va dalla pro-gettazione al servizio post vendita, è in grado di assicurare lamassima efficacia del prodotto in tutto il mondo.
Ulteriori garanzie per il cliente sono la costruzione su lineedi montaggio e collaudo completamente automatiche inottemperanza alle normative UNI-EN ISO 9001. Altre normati-ve di riferimento sono la marcatura CE relativa alla bassa ten-sione e UL 508/508C.
Per quanto riguarda la normativa CE sull’emissione e l’im-munità ai radiodisturbi, la compatibilità è ottenuta mediantel’impiego dei relativi filtri.
I Servoinverter serie 9300, insieme al programma motori,costituiscono l’attuale vertice della tecnologia AC.L’esperienze maturate in numerose applicazioni nei diversi set-tori dell’industria e le eccellenti caratteristiche di controlloconsentono la massima versatilità in ogni tipo di applicazione.
Il potente software di gestione consente la scelta ottimaledella motorizzazione in funzione delle necessità dinamiche edel momento d’inerzia del carico. È possibile infatti deciderel’impiego di motori con tecnologie differenti ed equipaggiarlicon differenti sistemi di retroazione oppure in modalità sen-sorless. Tutto con il medesimo hardware e con un unico siste-ma operativo.
I Servoinverter serie 9300 costituiscono un azionamentoglobale in grado di soddisfare tutte le necessità di motorizza-zione di una macchina costituisce un concreto risparmio:˘ nella formazione del personale,˘ nei minimi tempi di messa in servizio˘ nei ridotti tempi di fermo macchina

DrivesServoinverter 9300
1
1-50 Drives, motori, automazione 10/2006
Automazione
Drive PLC>> Pag. 3-3
I/O remoti>> Pag. 3-7
HMI>> Pag. 3-13
Moduli diespansione
Software di configurazione>> Pagg. 1-77
Telecontrollo>> Pagg. 3-35
Chopper e resistenze di frenatura>> Pag. 1-91
Drives e accessori
Alimentatoricon o senzarecupero inrete>> Pag. 1-84
Interruttori automatici,fusibili, sezione cavi >> pag. 1-96
Rete ~
= DC bus
Filtri di retee filtri RFI>> Pag. 1-87
Servoinverter 9300 base >> Pag. 1-58 0,37 - 90 kW
Systembus CAN integrato
I/O digitali e analogici integrati
Moduli AIF: >> Pag. 3-17 Profibus-DP, Interbus-S, DeviceNet,Lecom
Tastiera
Interfaccia AIF
Servomotore/Servomotoriduttore
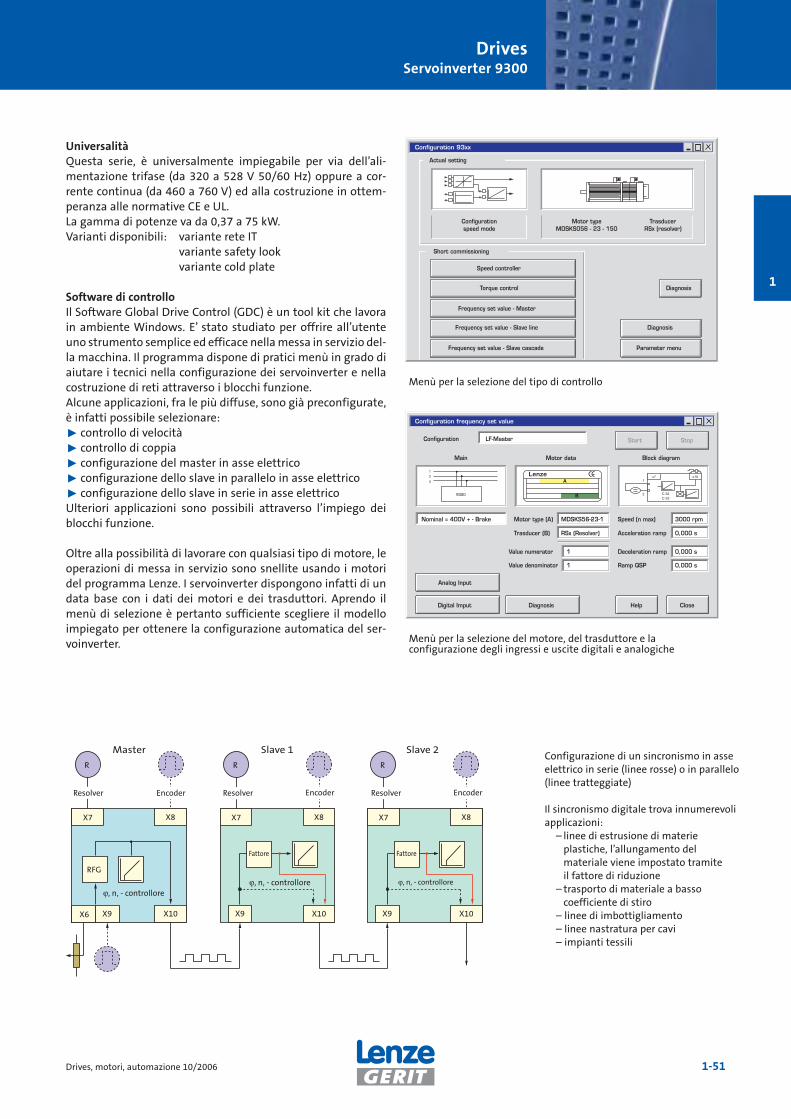
DrivesServoinverter 9300
1
1-51Drives, motori, automazione 10/2006
UniversalitàQuesta serie, è universalmente impiegabile per via dell’ali-mentazione trifase (da 320 a 528 V 50/60 Hz) oppure a cor-rente continua (da 460 a 760 V) ed alla costruzione in ottem-peranza alle normative CE e UL.La gamma di potenze va da 0,37 a 75 kW.Varianti disponibili: variante rete IT
variante safety lookvariante cold plate
Software di controlloIl Software Global Drive Control (GDC) è un tool kit che lavorain ambiente Windows. E’ stato studiato per offrire all’utenteuno strumento semplice ed efficace nella messa in servizio del-la macchina. Il programma dispone di pratici menù in grado diaiutare i tecnici nella configurazione dei servoinverter e nellacostruzione di reti attraverso i blocchi funzione.Alcune applicazioni, fra le più diffuse, sono già preconfigurate,è infatti possibile selezionare:˘ controllo di velocità˘ controllo di coppia ˘ configurazione del master in asse elettrico˘ configurazione dello slave in parallelo in asse elettrico˘ configurazione dello slave in serie in asse elettricoUlteriori applicazioni sono possibili attraverso l’impiego deiblocchi funzione.
Oltre alla possibilità di lavorare con qualsiasi tipo di motore, leoperazioni di messa in servizio sono snellite usando i motoridel programma Lenze. I servoinverter dispongono infatti di undata base con i dati dei motori e dei trasduttori. Aprendo ilmenù di selezione è pertanto sufficiente scegliere il modelloimpiegato per ottenere la configurazione automatica del ser-voinverter.
Diagnosis
Diagnosis
Parameter menu
Speed controller
Torque control
Frequency set value - Master
Frequency set value - Slave line
Frequency set value - Slave cascade
Actual setting
Configurationspeed mode
Motor typeMDSKS056 - 23 - 150
TrasducerRSx (resolver)
Configuration 93xx
Short commissioning
3000 rpm
0,000 s
0,000 s
0,000 s1
1
RSx (Resolver)
MDSKS56-23-1
Start StopLF-Master
Nominal = 400V + - Brake
Analog Input
Digital Imput
Configuration
Main Motor data Block diagram
Diagnosis Help Close
Motor type (A)
Trasducer (B)
Value numerator
Value denominator
Speed (n max)
Acceleration ramp
Deceleration ramp
Ramp QSP
Configuration frequency set value
A
B9300
12
3
C 32C 33
1
2
x7 x10
X7 X8
RFG
X6 X9 X10
X7 X8
X9 X10
X7 X8
X9 X10
ϕ, n, - controllore
Master Slave 1 Slave 2
Resolver Encoder Resolver Encoder Resolver Encoder
ϕ, n, - controlloreϕ, n, - controllore
RR R
Fattore Fattore
Menù per la selezione del motore, del trasduttore e laconfigurazione degli ingressi e uscite digitali e analogiche
Menù per la selezione del tipo di controllo
Configurazione di un sincronismo in asseelettrico in serie (linee rosse) o in parallelo(linee tratteggiate)
Il sincronismo digitale trova innumerevoliapplicazioni:
– linee di estrusione di materie plastiche, l’allungamento del materiale viene impostato tramite il fattore di riduzione
– trasporto di materiale a basso coefficiente di stiro
– linee di imbottigliamento– linee nastratura per cavi– impianti tessili

DrivesServoinverter 9300
1
1-52 Drives, motori, automazione 10/2006
Blocchi funzione e blocchi aritmeticiPer soddisfare le specifiche applicazioni, i servoinverter serie9300 dispongono di numerosi blocchi funzione e aritmeticiliberamente configurabili dall’utente mediante dei codici. Épertanto possibile costruire all’interno del drive molte dellefunzioni che fino ad oggi erano delegate a PLC, o a schede elet-troniche dedicate, determinando un concreto risparmio. Adesempio si possono costruire algoritmi per ottimizzare un bal-lerino, una cella di carico o un calcolatore di diametro. Un ulte-riore vantaggio offerto dalla configurazione individuale è lamassima riservatezza dell’applicazione, cioè l’impossibilità daparte di alcuno di sfruttare la soluzione adottata.
Menù utenteLa possibilità di configurare il numero e la sequenza dei codicida parametrizzare rende estremamente semplice l’operativitàdel sistema. Pertanto anche personale non specializzato è ingrado di ottimizzare le funzioni della macchina sul posto.
Ingressi e uscite configurabiliSono disponibili due ingressi e uscite analogiche.Un’uscita digitale 0 – 500 kHz (encoder simulato).Un ingresso digitale 0 – 500 kHz (riferimento in frequenza).Cinque ingressi e un interrupt, quattro uscite digitali PLC com-patibili che possono essere ampliate collegando un moduloI/O al nodo Can Bus.
Shielding of all unassigned connection
FB editor - CONVAD1
Diagnostics
alphabetical
process
Sorting
all avaiable
only used
Function blocks
Connect: "ASW1-OUT2 —> Select marked FB input
CONV4CONV5CONVAD1CONVAD2
CONVAPH1CONVAPH2
FB name
123? I ? I
? I
ASW1-OUT
0
1
2
3
4
5
6
IN
CONVAD1 - Converter
Esempi di collegamento dei blocchi funzione: nodo di collegamento
C0601/1
C0601/2
C0602/1
C0602/2
ARIT2-IN2
x
y
C0600
+ – x
/ x/ (1-y)
200%
Configurazione Codice/i Funzioni Nome uscita codice/i visualizzato
ARIT2
ARIT2-Out
ARIT2-IN1
AIN2-OUT
C0408
C0409/2
AIN2-GAIN
C0407
C0409/1
AIN2-OFFSET
AIN2
NomeFB
Nomeingresso
Parametrizzazionecodice/i
NomeFB
Nome uscitaCodicevisualizzato
Nomeingresso
3
4
C0026/2
C0027/2
Configurazionecodice
C0432
C0434/2
AOUT1-OFFSET
C0433
C0434/3
AOUT1-GAIN
AOUT2
NomeFB
Codicevisualizzato
C0026/2
C0027/2
Configurazionecodice
C0431
C0431
AOUT1-IN62
Esempio di configurazione dei blocchi funzione:
– ingressi– blocco aritmetico– uscite
Master virtualeQuesta funzione consiste in un uscita regolabile in frequenzain grado di simulare il segnale generato dall’unità di controllodella macchina. In questo modo è possibile collaudare modulimacchina in modo completamente indipendente.

DrivesServoinverter 9300
1
1-53Drives, motori, automazione 10/2006
X10
Riduttore
E4 E5 28 A1 A4 39 A2
1
2
=
X7
R
Resolver
X79300 Slave
X10
Riduttore
E4 E5 28 A1 A4 39 A2
R
Resolver
X9
Fattore di stiro
RFR nact=0 RFR nact=0
1:5 1:5
Master Slave
9300 Master –
+
M
Motore Encoder
M
Motore Encoder
Touch probe Touch probe
X8 X8
Motori e retroazioneVia software è possibile configurare il tipo di motore più ido-neo alla propria applicazione (caricandolo dal data base), inpratica si può scegliere tra:˘ motore asincrono trifase sensorless in applicazioni a bassa
dinamica˘ servomotore asincrono con resolver, encoder incrementale
o assoluto con funzione Sin Cos in applicazioni a mediadinamica
˘ servomotore sincrono con resolver o encoder con funzioneSin Cos in applicazioni ad alta dinamica e precisione.
Tutto sempre con il medesimo hardware e software!
Moduli di comunicazioneProgettati per essere ”ready to use” (pronti all’uso), questiinverter supportano i più comuni sistemi bus. Tipici sistemi dicontrollo quali PC e PLC possono pertanto essere utilizzaticome host. I moduli di interfaccia addizionali, da innestarsi in alternativaalla tastiera, consentono il collegamento ad una rete. Sonodisponibili interfacce RS 232/485 a fibra ottica o via cavo ed imoduli InterBus-S, InterBus Loop, ProfiBus, DeviceNet, LON,per collegamento a differenti bus di campo. Qesti moduli sonoampiamente descritti nella sezione 3: Accessori.
CanBus integratoIl bus di sistema, integrato di serie, si basa sul protocollo CanOpen e consente lo scambio di dati tra azionamenti e parti
Controllodi velocità
Controlloangolare
C051nact
C025Encoder: tipoe risoluzione
X7
X8
C050nset
+
–
Resolver
Encoder
Encoder
R
Possibili tipi di retroazione del motore
Controllo di sincronismo angolare contouch-probe e funzione di homing.
Applicazioni tipiche:– macchine da imballaggio– riempitrici– macchine da stampa– convogliatori per smistamento
decentrate del sistema. La trasmissione avviene in tempo rea-le. Questo systembus è caratterizzato da un’elevata immunitàai disturbi, grande economicità e massima semplicità dei col-legamenti. Tramite appositi dispositivi opzionali, illustrati nel-la sezione 3: Accessori, è possibile espandere il numero ed iltipo degli I/O.
Modulo alimentatore con recupero in reteConsigliato nel funzionamento multiasse o con carichi forte-mente rigenerativi, permette lo scambio di energia tra gli assie il recupero in rete dell’energia con un conseguente risparmioenergetico. Gli alimentatori sono descritti nella sezione 3Accessori.
Modulo alimentatore senza recupero in reteSimile al modello sopracitato, non consente il recupero dell’e-nergia in rete. nella sezione 3: Accessori.
Controllo mancanza rete (M-Fail) Questa funzione, permette in caso d’interruzione della rete,che l’energia cinetica venga utilizzata dagl'inverter per decele-rare e arrestare in modo controllato la macchina.
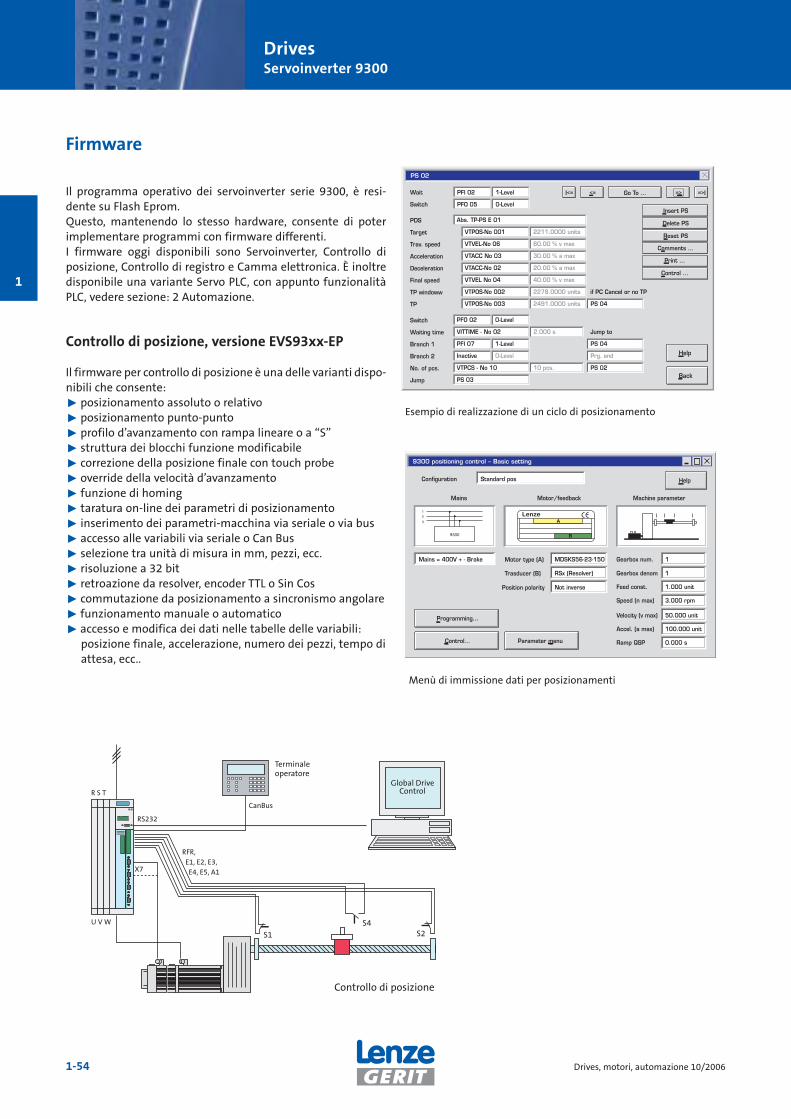
DrivesServoinverter 9300
1
1-54 Drives, motori, automazione 10/2006
Firmware
Il programma operativo dei servoinverter serie 9300, è resi-dente su Flash Eprom. Questo, mantenendo lo stesso hardware, consente di poterimplementare programmi con firmware differenti.I firmware oggi disponibili sono Servoinverter, Controllo diposizione, Controllo di registro e Camma elettronica. È inoltredisponibile una variante Servo PLC, con appunto funzionalitàPLC, vedere sezione: 2 Automazione.
Controllo di posizione, versione EVS93xx-EP
Il firmware per controllo di posizione è una delle varianti dispo-nibili che consente:˘ posizionamento assoluto o relativo˘ posizionamento punto-punto˘ profilo d’avanzamento con rampa lineare o a “S”˘ struttura dei blocchi funzione modificabile˘ correzione della posizione finale con touch probe˘ override della velocità d’avanzamento˘ funzione di homing˘ taratura on-line dei parametri di posizionamento˘ inserimento dei parametri-macchina via seriale o via bus˘ accesso alle variabili via seriale o Can Bus˘ selezione tra unità di misura in mm, pezzi, ecc. ˘ risoluzione a 32 bit˘ retroazione da resolver, encoder TTL o Sin Cos˘ commutazione da posizionamento a sincronismo angolare˘ funzionamento manuale o automatico˘ accesso e modifica dei dati nelle tabelle delle variabili:
posizione finale, accelerazione, numero dei pezzi, tempo diattesa, ecc..
PS 02
Abs. TP-PS E 01
VTPOS-No 001
VTVEL-No 06
VTACC No 03
VTACC-No 02
VTVEL No 04
VTPOS-No 002
VTPOS-No 003
2211.0000 units
60.00 % v max
30.00 % a max
20.00 % a max
40.00 % v max
2278.0000 units if PC Cancel or no TP
2491.0000 units
PFO 02
VITTIME - No 02
PFI 07
Inactive
VTPCS - No 10
PS 04
Jump to
PS 04
Prg. end
PS 02
2.000 s
10 pcs.
PS 03
0-Level
1-Level
0-Level
PFI 02
PFO 05
1-Level
0-Level
Wait
Switch
PDS
Target
Trav. speed
Acceleration
Deceleration
Final speed
TP windoww
TP
Switch
Waiting time
Branch 1
Branch 2
No. of pcs.
Jump
=>I=>I<= <= Go To ...
Insert PS
Delete PS
Reset PS
Comments ...
Print ...
Control ...
Back
Help
Esempio di realizzazione di un ciclo di posizionamento
1
RSx (Resolver)
HelpStandard pos
Mains = 400V + - Brake
Configuration
Mains Motor/feedback Machine parameter
MDSKS56-23-150Motor type (A)
Trasducer (B)
Gearbox num.
1
1.000 unit
3.000 rpm
Gearbox denom
Feed const.
Speed (n max)
9300 positioning control – Basic setting
A
B9300
12
3
Not inversePosition polarity
50.000 unit
100.000 unit
0.000 s
Velocity (v max)
Accel. (a max)
Ramp QSP
Programming...
Control... Parameter menu
Menù di immissione dati per posizionamenti
Global DriveControl
S1
S4S2
U V W
R S T
X7
RS232
RFR, E1, E2, E3, E4, E5, A1
Terminale operatore
CanBus
Controllo di posizione
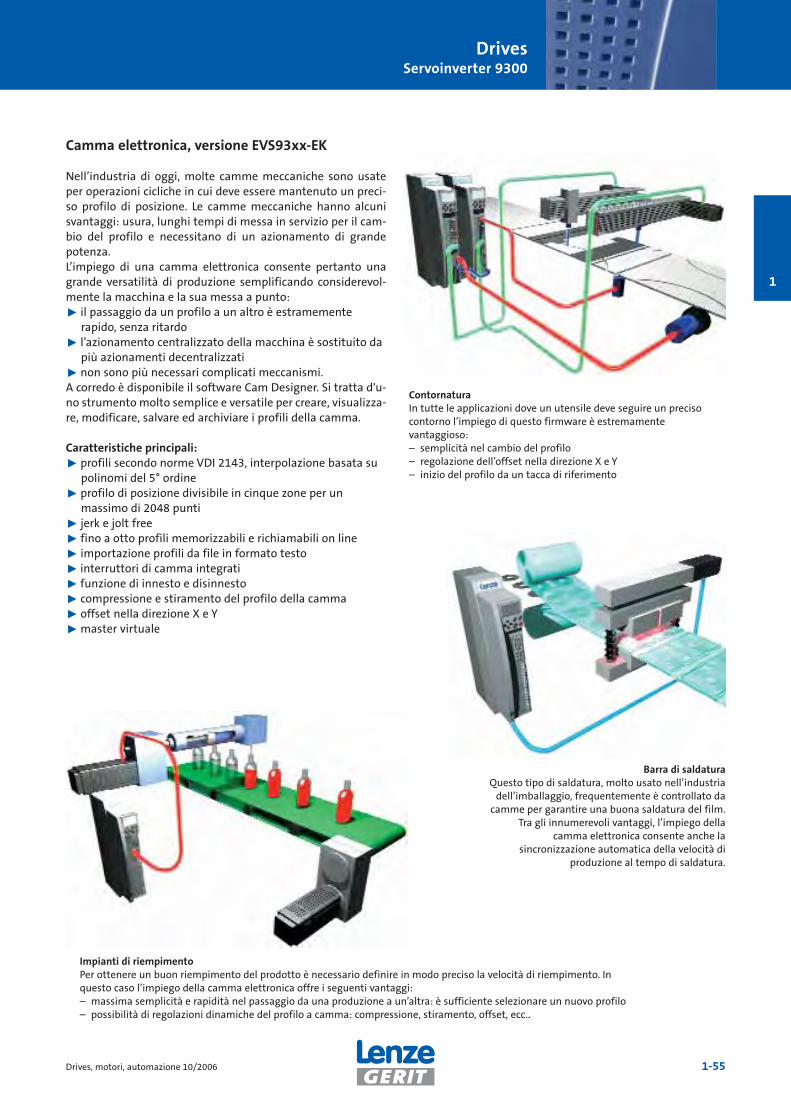
DrivesServoinverter 9300
1
1-55Drives, motori, automazione 10/2006
Camma elettronica, versione EVS93xx-EK
Nell’industria di oggi, molte camme meccaniche sono usateper operazioni cicliche in cui deve essere mantenuto un preci-so profilo di posizione. Le camme meccaniche hanno alcunisvantaggi: usura, lunghi tempi di messa in servizio per il cam-bio del profilo e necessitano di un azionamento di grandepotenza.L’impiego di una camma elettronica consente pertanto unagrande versatilità di produzione semplificando considerevol-mente la macchina e la sua messa a punto:˘ il passaggio da un profilo a un altro è estramemente
rapido, senza ritardo˘ l’azionamento centralizzato della macchina è sostituito da
più azionamenti decentralizzati˘ non sono più necessari complicati meccanismi.A corredo è disponibile il software Cam Designer. Si tratta d'u-no strumento molto semplice e versatile per creare, visualizza-re, modificare, salvare ed archiviare i profili della camma.
Caratteristiche principali:˘ profili secondo norme VDI 2143, interpolazione basata su
polinomi del 5° ordine˘ profilo di posizione divisibile in cinque zone per un
massimo di 2048 punti˘ jerk e jolt free˘ fino a otto profili memorizzabili e richiamabili on line˘ importazione profili da file in formato testo ˘ interruttori di camma integrati˘ funzione di innesto e disinnesto˘ compressione e stiramento del profilo della camma˘ offset nella direzione X e Y˘ master virtuale
Impianti di riempimentoPer ottenere un buon riempimento del prodotto è necessario definire in modo preciso la velocità di riempimento. Inquesto caso l’impiego della camma elettronica offre i seguenti vantaggi:– massima semplicità e rapidità nel passaggio da una produzione a un’altra: è sufficiente selezionare un nuovo profilo– possibilità di regolazioni dinamiche del profilo a camma: compressione, stiramento, offset, ecc..
Barra di saldaturaQuesto tipo di saldatura, molto usato nell’industria
dell’imballaggio, frequentemente è controllato dacamme per garantire una buona saldatura del film.
Tra gli innumerevoli vantaggi, l’impiego dellacamma elettronica consente anche la
sincronizzazione automatica della velocità diproduzione al tempo di saldatura.
ContornaturaIn tutte le applicazioni dove un utensile deve seguire un precisocontorno l’impiego di questo firmware è estremamentevantaggioso:– semplicità nel cambio del profilo– regolazione dell’offset nella direzione X e Y– inizio del profilo da un tacca di riferimento

DrivesServoinverter 9300
1
1-56 Drives, motori, automazione 10/2006
Stampa in più passaggiQuesto firmware determina la posizione della prima
stampa ed è in grado di regolare con la massimaprecisione sia la posizione angolare del rullo di
stampa che la velocità del rullo inseritore affinché isuccessivi passaggi siano a registro perfetto.
Tutto ciò con la macchina in funzione.
Taglierina trasversaleIl taglio deve essere sempre nella stessa posizionerelativa rispetto allo stampato, anche quando laposizione della stampa varia per disomogeneità delmateriale o della produzione. Il controllo di registrodetermina la posizione della stampa e regola laposizione angolare del cilindro di taglio in modo datagliere correttamente il materiale. L’asse elettricoconsente inoltre di eliminare complicati meccanismi.
Ulteriori vantaggiIl servoinverter 9300 ha già inclusa la necessaria intelligenzaper realizzare quanto voluto. É pertanto possibile: ˘ ridurre il numero dei componenti meccanici (fasatori
meccanici, alberi ecc.)˘ ridurre il numero di componenti di livello superiore (PLC,
IPC, moduli dedicati al controllo di registro)˘ costruzione modulare della macchina˘ maggiore produttività˘ tempi ridotti di messa in servizio ecc..
Controllo di registro, versione EVS93xx-ER
I servoinverter 9300 con firmware per controllo di registrooffrono un perfetto controllo della posizione angolare del cilin-dro di entrata, del rullo di stampa, del rullo di taglio o di altrestazioni. Sono pertanto in grado di compensare le variazionidelle caratteristiche del materiale e del processo di produzionesenza l’ausilio di un sistema di controllo superiore. Tagli, perfo-razioni, stampa, incollaggio, ecc. sono sempre dove è suppostodebbano essere. Gli effetti di deriva fanno parte del passato!
Caratteristiche principali˘ correzione senza fine (endless) del registro in funzione˘ acquisizione di una marcatura significativa sul materiale˘ finestra regolabile per il riconoscimento dei crocini di
registro˘ compensazione del fattore di riduzione˘ adattamento della caratteristica di controllo (filtro per il
controllo dell’anello)˘ generazione del setpoint attraverso il tempo o da un
determinato percorso˘ generazione di un profilo per posizionare l’azionamento
(registro grossolano)˘ inserimento dei dati in mm o pollici˘ compensazione della banda morta del canale che
acquisisce i crocini di registro˘ semplice adattamento alla condotta della macchina:
n° impulsi encoder, avanzamento materiale per giro, ecc..˘ blocchi funzione liberamente configurabili per adattare
l’applicazione.

DrivesServoinverter 9300
1
1-57Drives, motori, automazione 10/2006
9300 Servo PLC
La variante Servo PLC rappresenta la linea di demarcazionetra azionamenti e PLC. La programmazione nei linguaggi IEC1131-3, tipica dei PLC, consente la realizzazione di molte fun-zioni che fino ad oggi erano delegate a PLC, o a elettronichededicate, determinando un concreto risparmio. Sono inoltredisponibili numerosi "template" preconfigurati, per realizzarecontrolli di coppia, alberi elettrici, posizionamenti, cammeelettroniche, avvolgitori, ecc. La funzionalità PLC aggiunge un ulteriore valore al progetto econsente la realizzazione di macchine e sistemi a controllodecentralizzato applicato fino ai limiti delle possibilità. Il tut-to integrato nella tecnologia di azionamento.
Vantaggi˘ razionalizzazione della parte elettrica della macchina˘ notevole riduzione del carico sul bus tra PLC e servodrive˘ massimo sfruttamento delle prestazioni del servodrive˘ realizzazione di applicazioni complesse tramite funzioni
preconfigurate˘ rapida messa in servizio, grazie alle elevate prestazioni del
software di programmazione "Drive Developer Studio"˘ riduzione dei componenti del controllo˘ scelta del tempo ciclo del servo PLC˘ possibilità di selezionare task ciclici o task controllati sia su
base temporale che su eventi
Linguaggi di programmazione IEC 1131-3Con le vostre consuete conoscenze di programmazione, avre-te la sicurezza di operare con un’affermato standard interna-zionale, scegliendo fra 6 linguaggi differenti˘ Linguaggio PLC conosciuto (IL, LD, FBD, ST, SFC, CFC)˘ Rapida messa in funzione˘ Programmi PLC di dimensioni ridotte
Template per 9300 servo PLC
Per i Servo PLC sono disponibil differenti soluzioni di controllodi movimento in forma di pacchetti software aggiuntivi, cherappresentano un’estensione naturale del software di pro-grammazione PLC "Drive PLC Developer Studio". Oltre a conte-nere specifiche librerie di blocchi funzione, i pacchetti softwa-re dispongono anche di template applicativi e relativi esempi .
Template Cam:consente di realizzare camme elettroniche con estremasemplicità. Sono presenti profili preconfigurati e per realizzaresoluzioni su misura, è disponibile una libreria di blocchifunzione. In ogni servo asse è possibile archiviare e richiamarefino a 48 profili di movimento, riducendo i tempi di cambiodella produzione o del formato.
Winder:“Winder” permette di realizzare avvolgitori/svolgitori concontrollo tramite ballerino o con calcolo indiretto del tiro(regolazione in anello aperto o chiuso).
PositionerIl pacchetto software "Positioner" consente di realizzare fino a128 profili di posizionamento point-to-point e selezionare finoa 16 tipi di homing. La sequenza di controllo avviene secondola normativa IEC 61131-3

DrivesServoinverter 9300
1
1-58 Drives, motori, automazione 10/2006
Temperatura ambiente [°C] funzionamento 0°…+40° trasporto -25°…+70° stoccaggio -25°…+55°
Riduzione di potenza [%] ≤ 40°C: nessuna riduzione> 40° ~ < 50°C: riduzione del 2,5% ogni 1°K
Altitudine [%] ≤ 1000 m (s.l.m.): nessuna riduzione> 1000 ~ ≤ 4000 m (s.l.m.): riduzione del 5% ogni 1000 m
Umidità relativa [%] Classe F 85% senza condensa
Protezione IP20 standardIP41 (con separazione termica)NEMA 1 (protezione contro contatti)
Filtri RFI opzionali Filtri in classe A e B per reti industriali e reti residenzialiconformi alle nomative: EN 50081-1/2, IEC 22G-WG4 (Cv) 21
Immunità ai radiodisturbi Conformità alle normative: EN 50082-2, IEC 22G-WG4 (Cv) 21
Normativa Standard SeveritàESD EN61000-4-2 3, i.e. 8 kV con dissipazione in aria
e 6 kV con dissipazione per contattoRF-field (housing) EN61000-4-3 3, i.e. 10 V/m; da 27 a 1000 MHzRF-field burst EN61000-4-4 3/4, i.e. 2 kV / 5 kHzSorgente (tensione pulsantesui cavi d’alimentazione) IEC 1000-4-5 3, i.e. 1,2/50 ms, 1kV fase-fase, 2kV fase-PE
Certificazioni CE (bassa tensione)UL 508 / UL 508C (equipaggiamenti industriali di controllo e potenza)
Moduli alimentatori A recupero d’energia Modulo 9341: 5,5 kWModulo 9342: 11,0 kWModulo 9343: 22,0 kW
Senza recupero d’energia Modulo 9364: 55 kWModulo 9365: 110 kW
Modulo di frenatura con Modulo 9351resistenza di frenatura [Ω] 47 Ω interna
Chopper di frenatura Chopper 9352Resistenze di frenatura [Ω] 18 Ω min. esterna
Moduli d’automazione CanBus: Integrato nell’azionamentoLecom A/B RS232/485: EMF2102IB-V001Lecom B RS485: EMF2102IB-V002Lecom-LI fibra ottica (LWZ): EMF2102IB-V003InterBus-S: EMF2113IBProfiBus-DP: EMF2133IBDeviceNet: EMF2175IB
Modulo tastiera EMZ9371BC
Modulo espansione terminali I/O EMZ9374IB
Caratteristiche

DrivesServoinverter 9300
1
1-59Drives, motori, automazione 10/2006
Dati Tecnici per servizio intermittente: utilizzo (duty cycle) = 70%, potenze da 0,37 a 3 kW
Tipo EVS9321-ES EVS9322-ES EVS9323-ES EVS9324-ES
Alimentazione tensione Vrete [V] 3 x 320 V…528 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 460 VDC...740 VDC ± 0%
Corrente nominale assorbita Irete [A] 1,5/2,1 2,5/3,5 3,9/5,5 7,0/ -
Dati per alimentazione a Vrete [V] 400 480 400 480 400 480 400 480
Potenza motore (4 poli ASM) PN [kW] 0,37 0,37 0,75 0,75 1,5 1,5 3,0 3,0
Potenza in uscita SN8 [kVA] 1,0 1,2 1,7 2,1 2,7 3,2 4,8 5,8
Corrente nom. in uscita con (8k Hz)* IN8 [A] 1,05 1,05 1,7 1,7 2,6 2,6 4,7 4,7frequenza di commutazione
(16 kHz)* IN16 [A] 1,1 1,1 1,8 1,8 2,9 2,9 5,2 5,2
Corrente max. per 60s con (8k Hz)* Imax8 [A] 3,0 3,0 5,0 5,0 7,8 7,8 14,0 14,0frequenza di commutazione
(16 kHz)* Imax16 [A] 2,2 2,2 3,6 3,6 5,8 5,8 10,4 10,4
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Dimensioni: (h x L x p) [mm] 350 x 78 x 250 350 x 97 x 250
Dimensioni: (h x L x p) ➀ [mm] 384 x 78 x 250 384 x 97 x 250
Peso m [kg] 3,5 5,0
Dati Tecnici per funzionamento continuativo, potenze da 0,37 a 3 kW
Tipo EVS9321-ES EVS9322-ES EVS9323-ES EVS9324-ES
Alimentazione tensione Vrete [V] 3 x 320 V…528 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 460 VDC...740 VDC ± 0%
Corrente nominale assorbita Irete [A] 1,5/2,1 2,5/3,5 3,9/5,5 7,0/ -
Dati per alimentazione a Vrete [V] 400 480 400 480 400 480 400 480
Potenza motore (4 poli ASM) PN [kW] 0,37 0,37 0,75 0,75 1,5 1,5 3,0 3,0
Potenza in uscita SN8 [kVA] 1,0 1,2 1,7 2,1 2,7 3,2 4,8 5,8
Corrente nom. in uscita con (8k Hz)* IN8 [A] 1,5 1,5 2,5 2,5 3,9 3,9 7,0 7,0frequenza di commutazione
(16 kHz)* IN16 [A] 1,1 1,1 1,8 1,8 2,9 2,9 5,2 5,2
Corrente max. per 60s con (8k Hz)* Imax8 [A] 2,3 2,3 3,8 3,8 5,9 5,9 10,5 10,5frequenza di commutazione
(16 kHz)* Imax16 [A] 1,7 1,7 2,7 2,7 4,4 4,4 7,8 7,8
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 100 110 140 200
Dimensioni: (h x L x p) [mm] 350 x 78 x 250 350 x 97 x 250
Dimensioni: (h x L x p) ➀ [mm] 384 x 78 x 250 384 x 97 x 250
Peso m [kg] 3,5 5,0
➀ Dimensioni comprensive delle staffe di fissaggio– Versioni disponibili: EVS93xx-ES, versione con firmware controllo di velocità
EVS93xx-EP, versione con firmware controllo di posizioneEVS93xx-EK, versione con firmware camma elettronicaEVS93xx-ER, versione con firmware controllo di registro
– Varianti disponibili: variante rete ITvariante safety lookvariante cold plate
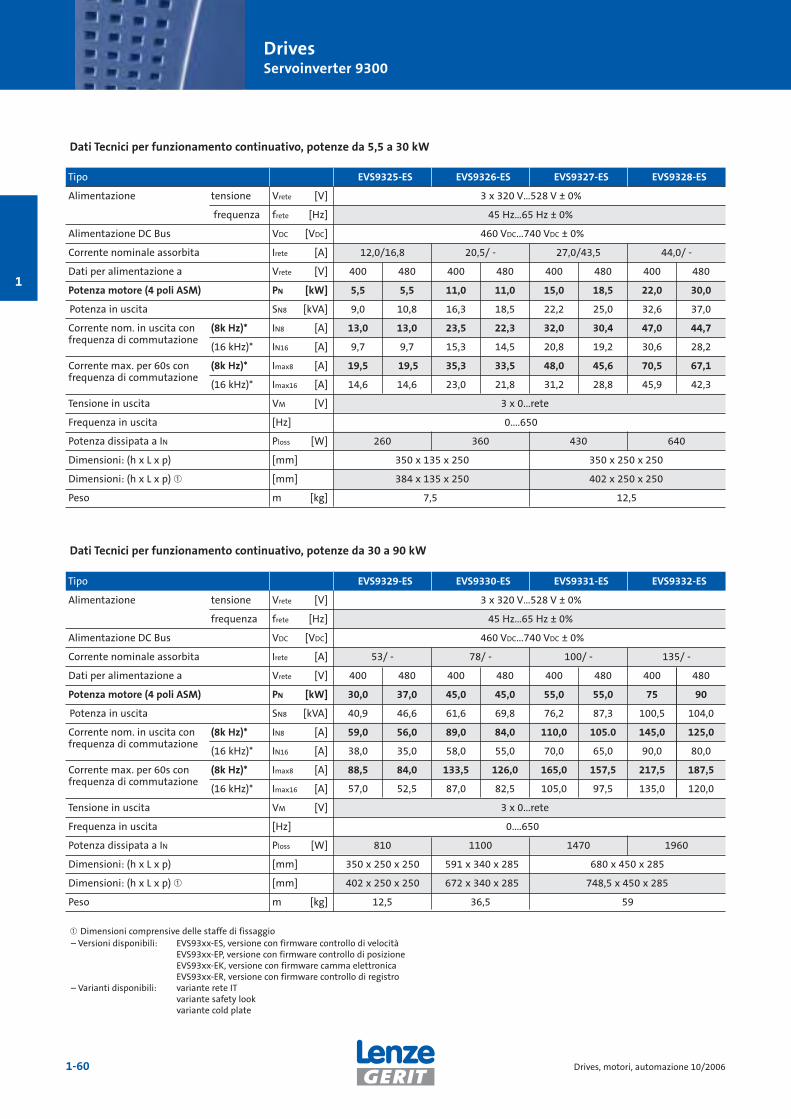
DrivesServoinverter 9300
1
1-60 Drives, motori, automazione 10/2006
Tipo EVS9329-ES EVS9330-ES EVS9331-ES EVS9332-ES
Alimentazione tensione Vrete [V] 3 x 320 V…528 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 460 VDC...740 VDC ± 0%
Corrente nominale assorbita Irete [A] 53/ - 78/ - 100/ - 135/ -
Dati per alimentazione a Vrete [V] 400 480 400 480 400 480 400 480
Potenza motore (4 poli ASM) PN [kW] 30,0 37,0 45,0 45,0 55,0 55,0 75 90
Potenza in uscita SN8 [kVA] 40,9 46,6 61,6 69,8 76,2 87,3 100,5 104,0
Corrente nom. in uscita con (8k Hz)* IN8 [A] 59,0 56,0 89,0 84,0 110,0 105.0 145,0 125,0frequenza di commutazione
(16 kHz)* IN16 [A] 38,0 35,0 58,0 55,0 70,0 65,0 90,0 80,0
Corrente max. per 60s con (8k Hz)* Imax8 [A] 88,5 84,0 133,5 126,0 165,0 157,5 217,5 187,5frequenza di commutazione
(16 kHz)* Imax16 [A] 57,0 52,5 87,0 82,5 105,0 97,5 135,0 120,0
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 810 1100 1470 1960
Dimensioni: (h x L x p) [mm] 350 x 250 x 250 591 x 340 x 285 680 x 450 x 285
Dimensioni: (h x L x p) ➀ [mm] 402 x 250 x 250 672 x 340 x 285 748,5 x 450 x 285
Peso m [kg] 12,5 36,5 59
Dati Tecnici per funzionamento continuativo, potenze da 30 a 90 kW
➀ Dimensioni comprensive delle staffe di fissaggio– Versioni disponibili: EVS93xx-ES, versione con firmware controllo di velocità
EVS93xx-EP, versione con firmware controllo di posizioneEVS93xx-EK, versione con firmware camma elettronicaEVS93xx-ER, versione con firmware controllo di registro
– Varianti disponibili: variante rete ITvariante safety lookvariante cold plate
Dati Tecnici per funzionamento continuativo, potenze da 5,5 a 30 kW
Tipo EVS9325-ES EVS9326-ES EVS9327-ES EVS9328-ES
Alimentazione tensione Vrete [V] 3 x 320 V…528 V ± 0%
frequenza frete [Hz] 45 Hz…65 Hz ± 0%
Alimentazione DC Bus VDC [VDC] 460 VDC...740 VDC ± 0%
Corrente nominale assorbita Irete [A] 12,0/16,8 20,5/ - 27,0/43,5 44,0/ -
Dati per alimentazione a Vrete [V] 400 480 400 480 400 480 400 480
Potenza motore (4 poli ASM) PN [kW] 5,5 5,5 11,0 11,0 15,0 18,5 22,0 30,0
Potenza in uscita SN8 [kVA] 9,0 10,8 16,3 18,5 22,2 25,0 32,6 37,0
Corrente nom. in uscita con (8k Hz)* IN8 [A] 13,0 13,0 23,5 22,3 32,0 30,4 47,0 44,7frequenza di commutazione
(16 kHz)* IN16 [A] 9,7 9,7 15,3 14,5 20,8 19,2 30,6 28,2
Corrente max. per 60s con (8k Hz)* Imax8 [A] 19,5 19,5 35,3 33,5 48,0 45,6 70,5 67,1frequenza di commutazione
(16 kHz)* Imax16 [A] 14,6 14,6 23,0 21,8 31,2 28,8 45,9 42,3
Tensione in uscita VM [V] 3 x 0...rete
Frequenza in uscita [Hz] 0....650
Potenza dissipata a IN Ploss [W] 260 360 430 640
Dimensioni: (h x L x p) [mm] 350 x 135 x 250 350 x 250 x 250
Dimensioni: (h x L x p) ➀ [mm] 384 x 135 x 250 402 x 250 x 250
Peso m [kg] 7,5 12,5

DrivesServoinverter 940
1
1-61Drives, motori, automazione 10/2006
Servo 940 positioning2...36 A
La tecnologia si fà semplice
Software di configurazione e programmazione MotionViewcon funzione oscilloscopio in tempo reale, liberamente scari-cabile da internet.
Caratteristiche
˘ Azionamento di motori sincroni e asincroni˘ Curve di accelerazione lineari o ad S˘ Chip di memoria rimuovibile˘ Certificazioni UL, cUL, CE (Bassa tensione e EMC)
˘ Controllo di coppia e velocità˘ Controllo di posizione incrementale, assoluto, a treno d’im-
pulsi o a segmenti, con risoluzione a 64 bit˘ Albero elettrico
˘ 12 ingressi digitali programmabili˘ 5 uscite digitali programmabili˘ 2 ingressi analogici programmabili˘ 1 uscita analogica programmabile
˘ Interfaccia RS232 come standard˘ Intefacce opzionali: CANopen, Ethernet, RS485 Modbus RTU
˘ Versioni a 120/240 VAC ˘ Versioni doubler voltave a 120 VAC (uscita 240 V)˘ Versioni 480 VAC ˘ Corrente massima 6...36 A˘ Corrente continuativa 2...12 A
La serie Lenze Simple Servo 940 positioning, progettata per leapplicazioni ad elevata dinamica, si distingue per la sua com-pletezza e semplicità di messa in servizio, dalle applicazionibase, fino alla completa programmazione.
I servo assi 9400 offrono un’elevata potenza di calcolo asso-ciata a performanti funzioni di controllo del movimento comeil controllo di coppia, di velocità, di posizione e albero elettri-co. Non sono quindi più necessarie schede di controllo dedi-cate ed i relativi cablaggi.
Sul pannello frontale è inoltre presente un chip di memoriarimuovibile EPM, sul quale viene memorizzato il programmaapplicativo. Tramite un apposito accessorio a batteria è possi-bile duplicare, memorizzare, archiviare o editare i dati su PC.Si ottengono così interessanti risparmi di tempo per la messain servizio e di fermo macchina.
L’ampia possibilittà di comunicazione, tra cui un’ interfacciaEthernet per un collegamento ad alte prestazioni, permetteun collegamento ottimale con i dispositivi di livello superiore.
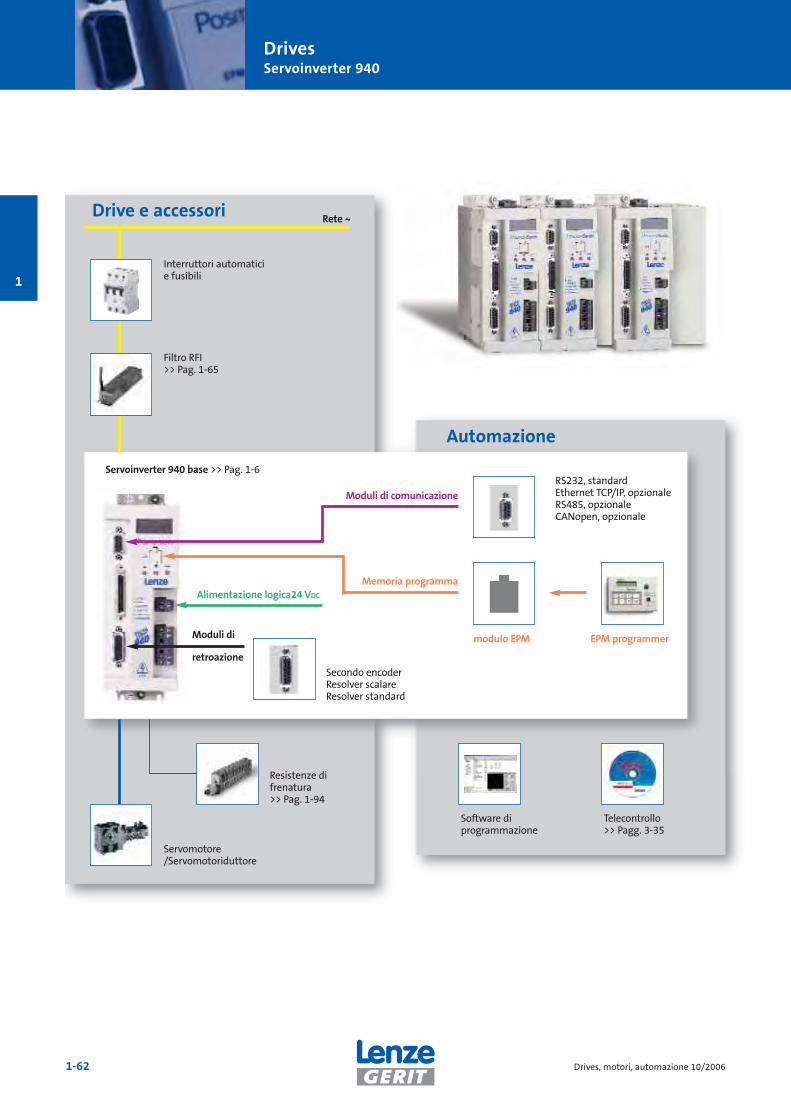
DrivesServoinverter 940
1
1-62 Drives, motori, automazione 10/2006
Automazione
Drive e accessori
Resistenze difrenatura>> Pag. 1-94
Servoinverter 940 base >> Pag. 1-6
modulo EPM EPM programmer
Moduli di comunicazione
Memoria programma
Moduli di
retroazione
Alimentazione logica24 VDC
RS232, standardEthernet TCP/IP, opzionaleRS485, opzionaleCANopen, opzionale
Secondo encoderResolver scalareResolver standard
Interruttori automaticie fusibili
Filtro RFI>> Pag. 1-65
Software di programmazione
Telecontrollo>> Pagg. 3-35
Rete ~
Servomotore/Servomotoriduttore

DrivesServoinverter 940
1
1-63Drives, motori, automazione 10/2006
Condizioni standard di funzionamento
Conformità CE Bassa tensione e EMC
Certificazioni UL cUL
Immunità alle vibrazioni Fino a 2 g con frequenza di vibrazione entro 10 ... 2000 Hz
Livello di protezione IP20
Temperature stoccaggio -10 … +70°Cammissibili funzionamento 0 … +40°C
Deriva della temperatura 0,1% ogni 1°C
Altitudine ammissibile 0 … 4000 m slm oltre 1500 m slm, diminuire la corrente nominale in uscitadel 1% ogni 300 m
Umidità relativa Fino al 90% senza condensa
Posizione di montaggio Verticale a libro
Dati elettrici funzionali
Precisione +/- 1 posizione encoder
Uscita servo Sinusoidale
Funzionamento controllo di coppia Riferimento: ± 10 VDC, 16 bit;Tempo di ciclo: 32 μs; Campo di variazione: 100:1
Funzionamento controllo di velocità Riferimento: ± 10 VDC, 16 bit; Regolazione: ± 1 giro/minTempo di ciclo: 255 μs; Campo di variazione: 5000:1
Funzionamento controllo Riferimento: 0 ... 2 MHz; Ingresso PWMpasso/velocità (albero elettrico) Tempo di ciclo: 255 μs; Ampiezza minima impulso: 500 ns
Ingressi e uscite 12 ingressi digitali 5...24 VDC, isolati elettricamente 1 ingresso digitale dedicato 5...24 VDC, isolato elettricamente 4 uscite digitali 5...24 VDC, 100 mA, isolati elettr., a collettore aperto1 uscita digitale dedicata 5...24 VDC, 100 mA, isolati elettr., a collettore aperto2 ingressi analogici +/- 10 V differenziale, 16 bit1 uscita analogica +/- 10 V, 10 bit1/2 ingressi encoder fino a 2 MHz (1 ingresso standard + 1 opzionale)1 ingresso resolver risoluzione 12 bit (opzionale)
Moduli di comunicazione RS232 standard 38,4 kB/s protocollo PPP (Point to Point Protocol)Ethernet TCP/IP opzionale E94ZAETH1RS485 opzionale E94ZARS41 (38,4 kB/s indirizzabile a 32 dispositivi,
protocollo PPP o Modbus (RTU slave)CANopen opzionale E94ZAETH1 (250/500/1000 kB/s)
Moduli di retroazione E94ZAENC1 modulo per secondo encoderE94ZARSV2 modulo per resolver scalareE94ZARSV3 modulo per resolver standard
Filtri EMC da installare sotto E94ZF04T4A1 per E94P020Y2N, E94P020T4N.E94ZF07T4A1 per E94P040Y2N, E94P040T4N, E94P050T4N.E94ZF15T4A1 per E94P080Y2N.E94ZF15T4A2 per E94P100Y2N.
Resistenze esterne di frenatura (IP20) E94ZB20A150A per E94P080S2F, E94P100S2F, E94P080Y2N, E94P100Y2N.E94ZB40A080A per E94P020S1N, E94P040S1N, E94P020S2F, E94P040S2F,
E94P020Y2N, E94P040Y4N, E94P120Y2N.E94ZB75A150A per E94P040T4N, E94P050T4N, E94P060T4N.E94ZBF0A080A per E94P020T4N.
Caratteristiche
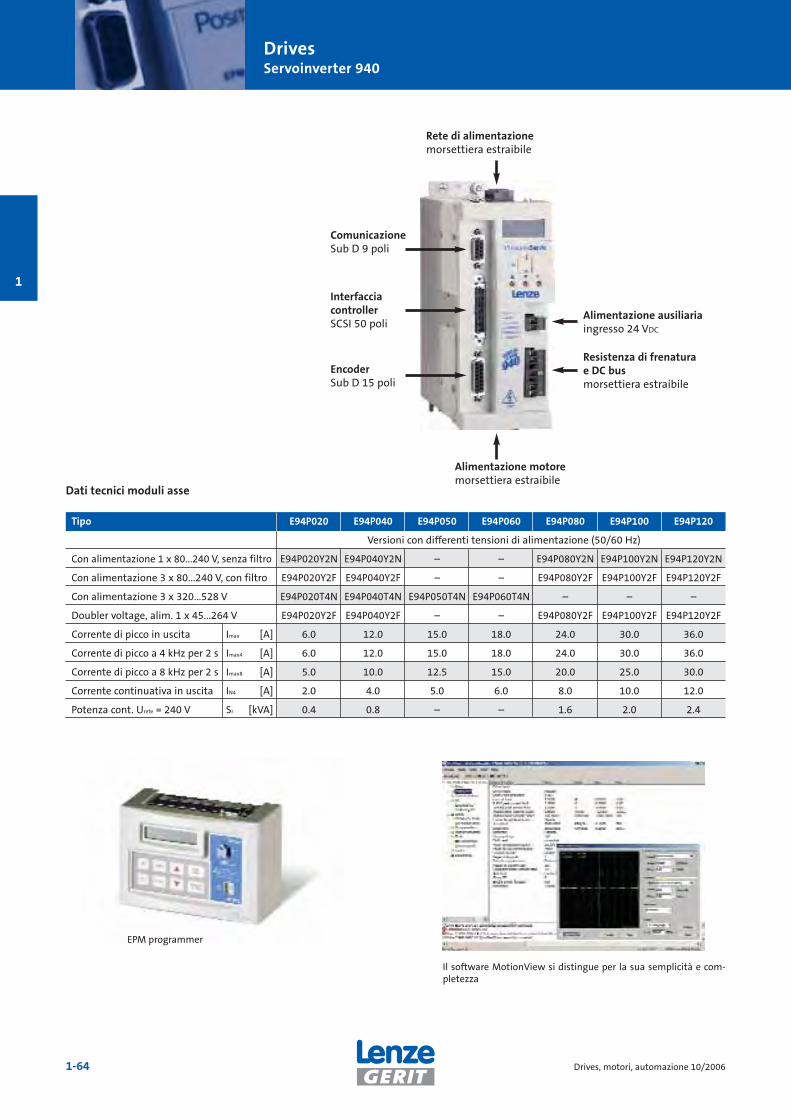
DrivesServoinverter 940
1
1-64 Drives, motori, automazione 10/2006
Dati tecnici moduli asse
Tipo E94P020 E94P040 E94P050 E94P060 E94P080 E94P100 E94P120
Versioni con differenti tensioni di alimentazione (50/60 Hz)
Con alimentazione 1 x 80...240 V, senza filtro E94P020Y2N E94P040Y2N – – E94P080Y2N E94P100Y2N E94P120Y2N
Con alimentazione 3 x 80...240 V, con filtro E94P020Y2F E94P040Y2F – – E94P080Y2F E94P100Y2F E94P120Y2F
Con alimentazione 3 x 320...528 V E94P020T4N E94P040T4N E94P050T4N E94P060T4N – – –
Doubler voltage, alim. 1 x 45...264 V E94P020Y2F E94P040Y2F – – E94P080Y2F E94P100Y2F E94P120Y2F
Corrente di picco in uscita Imax [A] 6.0 12.0 15.0 18.0 24.0 30.0 36.0
Corrente di picco a 4 kHz per 2 s Imax4 [A] 6.0 12.0 15.0 18.0 24.0 30.0 36.0
Corrente di picco a 8 kHz per 2 s Imax8 [A] 5.0 10.0 12.5 15.0 20.0 25.0 30.0
Corrente continuativa in uscita IN4 [A] 2.0 4.0 5.0 6.0 8.0 10.0 12.0
Potenza cont. Urete = 240 V Sr [kVA] 0.4 0.8 – – 1.6 2.0 2.4
Interfaccia controllerSCSI 50 poli
EncoderSub D 15 poli
ComunicazioneSub D 9 poli
Resistenza di frenatura e DC bus morsettiera estraibile
Alimentazione motoremorsettiera estraibile
Rete di alimentazione morsettiera estraibile
Alimentazione ausiliaria ingresso 24 VDC
Il software MotionView si distingue per la sua semplicità e com-pletezza
EPM programmer
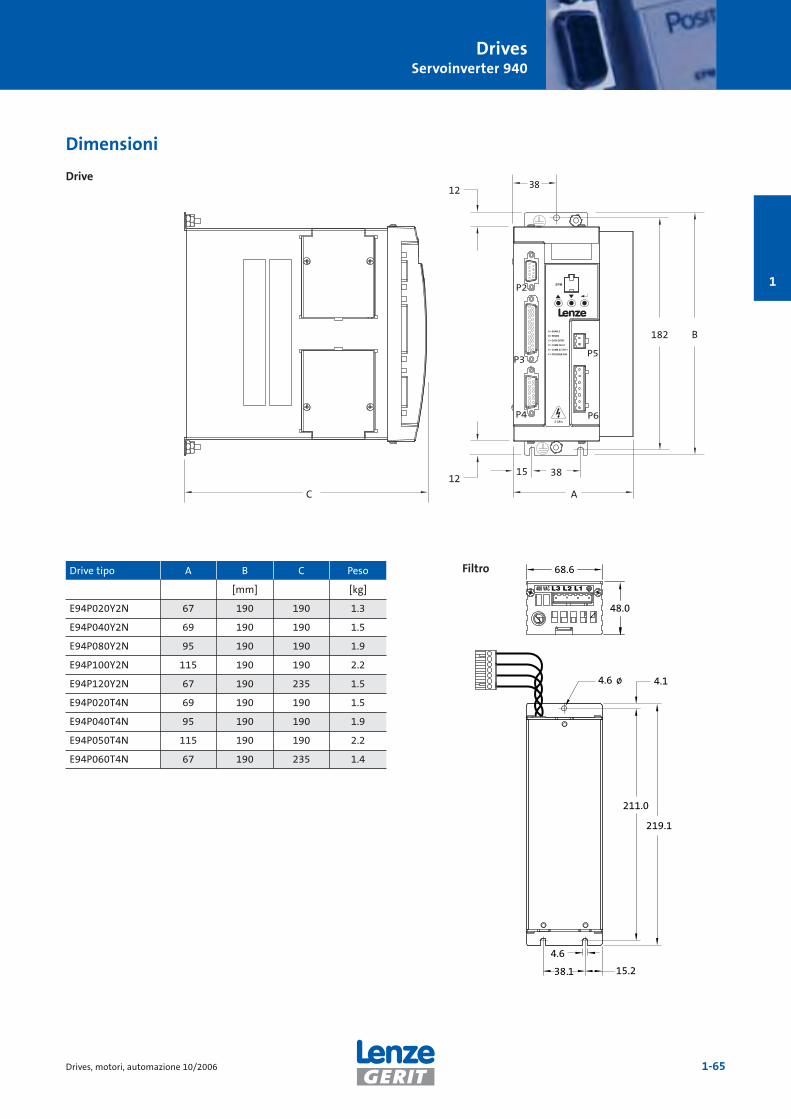
DrivesServoinverter 940
1
1-65Drives, motori, automazione 10/2006
P2
P3
P4 P6
P5
182 B
C A
38
381512
12
Dimensioni
Drive
FiltroDrive tipo A B C Peso
[mm] [kg]
E94P020Y2N 67 190 190 1.3
E94P040Y2N 69 190 190 1.5
E94P080Y2N 95 190 190 1.9
E94P100Y2N 115 190 190 2.2
E94P120Y2N 67 190 235 1.5
E94P020T4N 69 190 190 1.5
E94P040T4N 95 190 190 1.9
E94P050T4N 115 190 190 2.2
E94P060T4N 67 190 235 1.4
4.1
219.1
4.6 ø
4.6
68.6
48.0
38.1 15.2
211.0

DrivesServoinverter 940
1
1-66 Drives, motori, automazione 10/2006

DrivesServoinverter ECS
1
1-67Drives, motori, automazione 10/2006
Servo ECS multiasse4...64 A
Dinamica,produttività,
flessibilità
Gli ECS sono disponibili in due versioni:
˘ Base: costituita da differenti versioni complete di uno spe-cifico software applicativo preinstallato a scelta tra, Speed& Torque, Posi & Schaft e Motion.
˘ Application: si tratta di una versione aperta, liberamenteprogrammabile tramite i linguaggi di programmazione IEC1131-3, su cui è possibile caricare differenti template appli-cativi: Cam, Positioner, Winder.
Il servo sistema Lenze Servo ECS è progettato specificamenteper le applicazioni multiasse ed è composto da moduli asse,alimentatori, filtri, servomotori e da una vasta gamma di solu-zioni accessorie che ne esaltano la versatilità.
I moduli asse offrono un'alta capacità di sovraccarico, finoal 300% ed un elevata dinamica, assicurano un apprezzatissi-mo livello di precisione dei movimenti coordinati multiasse esono in grado di comunicare i setpoints di posizione, tramite ilbus CAN integrato, con tempi di ciclo inferiori a 1 ms. Questecaratteristiche li rendono particolarmente apprezzati per l’a-zionamento di robot, sistemi a portale, dispositivi pick & pla-ce, così come per l'intero settore delle macchina per imballag-gio e in tutte le applicazioni ove la dinamica e quindi la pro-duttività, sono fattori essenziali. Sono disponibili moduli assecon correnti massime in uscita fino a 64 A.
Questi drive sono concepiti per essere alimentati da unmodulo alimentatore centrale. Tramite il DC Bus viene realiz-zato uno scambio di energia tra gli assi che realizza un concre-to risparmio energetico che si aggiunge alla riduzione dei costidi cablaggio e a quelli dovuti all’unificazione dei dispositivi dicommutazione e dei filtri di rete.

DrivesServoinverter ECS
1
1-68 Drives, motori, automazione 10/2006
Automazione
Drive PLC>> Pag. 3-3
I/O terminals>> Pag. 3-7
HMI>> Pag. 3-13
Moduli diespansione
Software di configurazione>> Pagg. 1-77
Telecontrollo>> Pagg. 1-35
Drive e accessori
Servomotore/Servomotoriduttore
Interruttori automaticie fusibili
Rete ~
Filtri di retee filtri RFI>> Pag. 1-90
Servo ECSbase
Alimenta-tori DC bus
Modulo condensatore
Pag. 1-71 Pag. 1-73 Pag. 1-75
Systembus CAN integrato
Motionbus CAN integrato
I/O digitali e analogici integrati
Moduli AIF: >> Pag. 3-17Profibus-DP, Interbus-S, DeviceNet,Lecom
TastieraInterfaccia AIF
Resistenze di frenatura>> Pag. 1-94
Alimentazione integrata per logica24 VDC

DrivesServoinverter ECS
1
1-69Drives, motori, automazione 10/2006
Versioni e software applicativi
Versioni “Base”
I servosistemi multiasse ECS sono ideali in un’ampia varietàd’applicazioni. Per rendere più semplici e rapide le operazionidi configurazione e messa in servizio, sono stati realizzatedifferenti versioni complete di software applicativo: Speed &Torque, Posi & Shaft o Motion. Essi sono specificatamentestudiati per applicazioni multiasse controllate da PLC, da uncontrollo assi oppure da un PC. Si ottiene così un’elevataprecisione nel ciclo di sincronizzazione di tutti gli assi, entro ilmicrosecondo.Se avete necessità di soluzioni specifiche, non presenti neipacchetti standard, queste saranno realizzabili. Contattatecon fiducia il nostro Ufficio Tecnico.
Speed & Torque, versione ECSES: questo software offre tutte le funzionalità per realizzare uncontrollo di velocità o di coppia. I parametri principali sonoinseribili sia manualmente, sia via CAN bus o altri bus dicampo. È possibile impostare fino a 15 velocità con proprierampe, lineari o ad “S”. Nel caso di una frenata rapida (quickstop), è garantito il sincronismo. In caso d’emergenza siattiverà la funzione standard di scollegamento sicuro delmotore, in conformità a EN 954-1, Categoria 3 e l’interventodel freno di stazionamento con funzione di controllo.
Posi & Shaft, versione ECSEP: questo software consente l’impostazione e l’archiviazione difino a 15 profili di posizionamento. Il posizionamento puòessere assoluto, relativo, modulo (relativo e infinito) o basatosu una velocità manuale fissa o sull’inseguimento di unafrequenza master (albero elettrico). Sono inoltre supportatisvariati sensori di posizione così come una riduzione dellacoppia al raggiungimento della posizione e la velocità dioverride. In aggiunta alle otto differenti opzioni di homing, lasicurezza integrata per lo scollegamento sicuro del motore ela logica del freno di stazionamento sono funzioni standard.
Motion, versione ECSEM: questo software è stato studiato per applicazioni multiassegestite da un sistema di controllo del movimento (es. ETCLenze). Il comando del drive avviene tramite un segnaleanalogico oppure via CAN bus. Per l’utilizzatore sonodisponibili otto differenti modalità di homing, due tipid’interpolazione (lineare o con polinomi di secondo ordine)ed il precontrollo della coppia. In aggiunta, la sicurezzaintegrata per lo scollegamento sicuro del motore e la logicadel freno di stazionamento sono funzioni standard.
Versione “Application” ECSEA
Per la versione “Application” sono disponibil differenti soluzio-ni di controllo di movimento in forma di pacchetti softwareaggiuntivi, che rappresentano un’estensione naturale delsoftware di programmazione PLC "Drive PLC Developer Studio".Oltre a contenere specifiche librerie di blocchi funzione, i pac-chetti software dispongono anche di template applicativi erelativi esempi .
Cam:consente di realizzare camme elettroniche con estremasemplicità. Sono presenti profili preconfigurati e per realizzaresoluzioni su misura, è disponibile una libreria di blocchifunzione. In ogni servo asse è possibile archiviare e richiamarefino a 48 profili di movimento, riducendo i tempi di cambiodella produzione o del formato.
Winder:“Winder” permette di realizzare avvolgitori/svolgitori concontrollo tramite ballerino o con calcolo indiretto del tiro(regolazione in anello aperto o chiuso).
PositionerIl pacchetto software "Positioner" consente di realizzare fino a128 profili di posizionamento point-to-point e selezionare finoa 16 tipi di homing. La sequenza di controllo avviene secondola normativa IEC 61131-3

DrivesServoinverter ECS
1
1-70 Drives, motori, automazione 10/2006
Condizioni standard di funzionamento
Conformità CE Low-Voltage Directive (73/23/EEC)
Certificazioni UL508C Underwriter Laboratories (File No. E132659)Power conversion equipment
Lunghezza massima dei cavi motore schermati 50 m alla tensione nominale di rete e frequenza di commutazione 8 kHz
Immunità alle vibrazioni Fino a 0,7 g secondo: Germanischer Lloyd, general conditions
Condizioni ambientali Classe 3K3 secondo EN 50178, senza condensa, umidità relativa media 30…95%
Livello d’inquinamento Livello 2 secondo VDE 0110, Parte 2
Temperature Trasporto -25 … +70°Cammissibili Stoccaggio -25 … +55°C
Funzionamento 0 … +55°C oltre +40°C, diminuire la corrente nominale in uscita del 2%/°C
Altitudine ammissibile 0 … 4000 m slm oltre 1000 m slm, diminuire la corrente nominale in uscitadel 5%/1000 m
Installazione Installazione in quadro elettrico IP54 per funzionamento con sicurezza integrata
Posizione di montaggio Verticale
Quote di rispetto Sopra/sotto ≥ 50 mm
installazione Di lato Installabile a libro, fianco a fianco senza alcuna quota di rispetto
Dati elettrici generali
EMC Secondo i requisiti di EN 61800-3
Disturbi emessi In accordo alla classe A di EN 55011(impiegando l’apposito filtro di linea)
Immunità ai disturbi Scondo EN 61800-3
Tipo di immunità Standard Livello
ESD 1) EN 61000-4-2 3: 8 kV dispersione in aria6 kV dispersione per contatto
Alta frequenza sui cavi EN 61000-4-6 10 V; 0.15 … 80 MHz
RFI (carcassa) EN 61000-4-3 3: 10 V/m; 80 … 1000 MHz
Esplosione EN 61000-4-4 3/4: 2 kV/5 kHz
Sovracorrente impulsiva (sulle fasi) EN 61000-4-5 3: 1.2/50 μs
1 kV phase-phase2 kV phase-PE
Isolamento Sovracorrenti secondo categoria III di VDE 0110
Dispersione a terra (secondo EN 50178) > 3.5 mA AC per funzionamento con idonei salvavita
Livello di protezione IP20 per installazione standard IP20 per installazione “cold plate”IP20 per installazione “push-through” (IP54 sul lato dissipatore)
Funzioni di protezione contro: Cortocircuito, dispersione a terra (protezione contro dispersione durante il funzionamento, protezione limitata contro dispersione delle fasi power-up), sovratensione, stallo del motore, sovratemperatura motore (ingresso PTC, controllo I2t)
Isolamento contro i cortocircuito Isolamento di sicurezza delle fasi: isolamento doppio/rinforzato secondo EN 50178;Tensione nominale d’isolamento 300 x √2 [V]
Caratteristiche
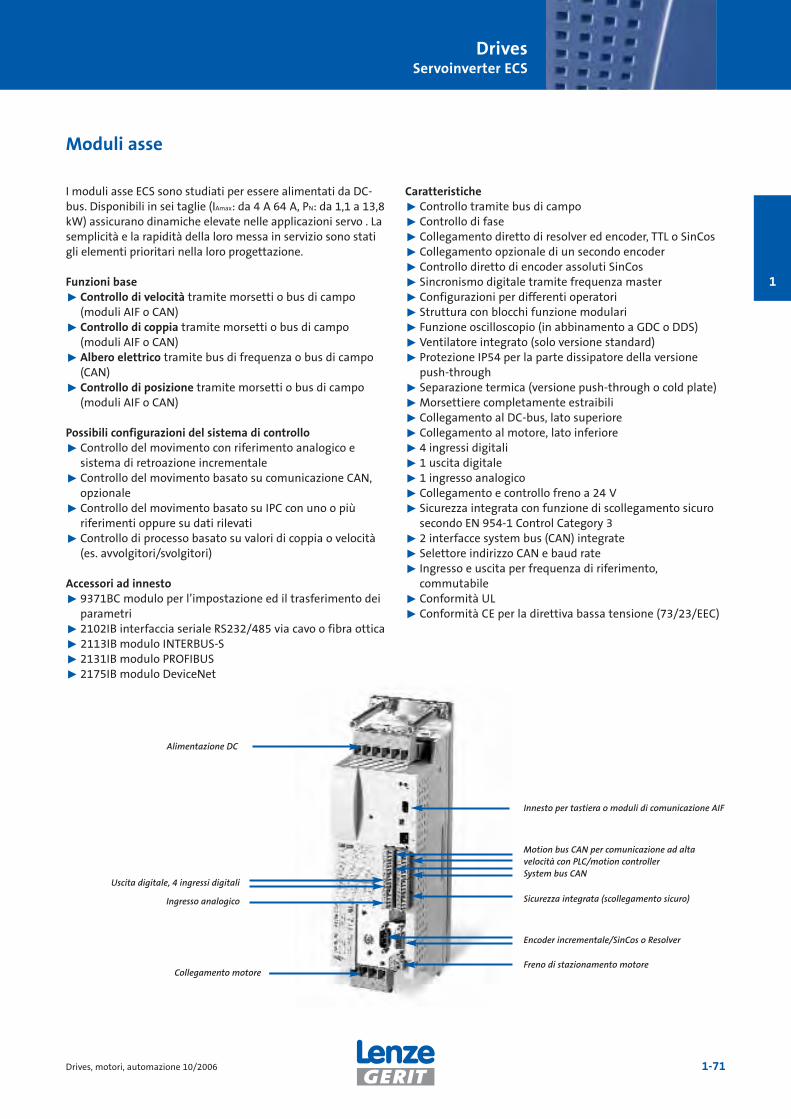
DrivesServoinverter ECS
1
1-71Drives, motori, automazione 10/2006
Moduli asse
I moduli asse ECS sono studiati per essere alimentati da DC-bus. Disponibili in sei taglie (IAmax: da 4 A 64 A, PN: da 1,1 a 13,8kW) assicurano dinamiche elevate nelle applicazioni servo . Lasemplicità e la rapidità della loro messa in servizio sono statigli elementi prioritari nella loro progettazione.
Funzioni base˘ Controllo di velocità tramite morsetti o bus di campo
(moduli AIF o CAN)˘ Controllo di coppia tramite morsetti o bus di campo
(moduli AIF o CAN)˘ Albero elettrico tramite bus di frequenza o bus di campo
(CAN)˘ Controllo di posizione tramite morsetti o bus di campo
(moduli AIF o CAN)
Possibili configurazioni del sistema di controllo˘ Controllo del movimento con riferimento analogico e
sistema di retroazione incrementale˘ Controllo del movimento basato su comunicazione CAN,
opzionale˘ Controllo del movimento basato su IPC con uno o più
riferimenti oppure su dati rilevati˘ Controllo di processo basato su valori di coppia o velocità
(es. avvolgitori/svolgitori)
Accessori ad innesto ˘ 9371BC modulo per l’impostazione ed il trasferimento dei
parametri ˘ 2102IB interfaccia seriale RS232/485 via cavo o fibra ottica ˘ 2113IB modulo INTERBUS-S ˘ 2131IB modulo PROFIBUS ˘ 2175IB modulo DeviceNet
Caratteristiche˘ Controllo tramite bus di campo˘ Controllo di fase˘ Collegamento diretto di resolver ed encoder, TTL o SinCos ˘ Collegamento opzionale di un secondo encoder ˘ Controllo diretto di encoder assoluti SinCos ˘ Sincronismo digitale tramite frequenza master ˘ Configurazioni per differenti operatori˘ Struttura con blocchi funzione modulari˘ Funzione oscilloscopio (in abbinamento a GDC o DDS)˘ Ventilatore integrato (solo versione standard)˘ Protezione IP54 per la parte dissipatore della versione
push-through˘ Separazione termica (versione push-through o cold plate)˘ Morsettiere completamente estraibili˘ Collegamento al DC-bus, lato superiore˘ Collegamento al motore, lato inferiore˘ 4 ingressi digitali˘ 1 uscita digitale˘ 1 ingresso analogico˘ Collegamento e controllo freno a 24 V˘ Sicurezza integrata con funzione di scollegamento sicuro
secondo EN 954-1 Control Category 3˘ 2 interfacce system bus (CAN) integrate˘ Selettore indirizzo CAN e baud rate ˘ Ingresso e uscita per frequenza di riferimento,
commutabile˘ Conformità UL ˘ Conformità CE per la direttiva bassa tensione (73/23/EEC)
Motion bus CAN per comunicazione ad altavelocità con PLC/motion controllerSystem bus CAN
Sicurezza integrata (scollegamento sicuro)
Encoder incrementale/SinCos o Resolver
Freno di stazionamento motore
Alimentazione DC
Uscita digitale, 4 ingressi digitali
Ingresso analogico
Innesto per tastiera o moduli di comunicazione AIF
Collegamento motore

DrivesServoinverter ECS
1
1-72 Drives, motori, automazione 10/2006
Dati tecnici moduli asse
1) “ò” inserire la versione come segue: Cold plate: “C”; Standard: “E”; push-through: “D”
2) La profondità dell’azionamento aumenta di 8 mm se si installa un moduloAIF base oppure di 24 mm se il modulo AIF è il 2113.
4) Dimensioni senza staffe o moduli AIF6) Consultate il ns. Ufficio Tecnico per il dimensionamento del dissipatore
esterno
Tipo 1) ECSòA004 ECSòA008 ECSòA016 ECSòA032 ECSòA048 ECSòA064
Corrente massima in uscita (corrente di accelerazione) IAmax [A] 4.0 8.0 16.0 32.0 48.0 64.0
Corrente nominale a 4 kHz 5) IN4 [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente nominale a 8 kHz 5) IN8 [A] 1.35 2.7 5.3 8.5 11.3 13.3
Corrente continuativa a velocità 0 I0, rms 4 kHz [A] 2.0 4.0 8.0 16.0 23.0 27.0
Corrente a velocità 0 per brevi periodi I0, rms 4 kHz [A] 3.0 6.0 12.0 24.0 36.0 48.0
Potenza in uscita a Urete = 400 V SN [kVA] 1.1 2.2 5.5 8.8 11.8 13.8
Corrente DC-bus IDCr [A] 2.5 4.9 9.8 15.6 20.9 24.5
Capacità DC-bus [μF] 165 165 165 165 330 330
Tensione DC-bus UDC [V] 0 ... 770
Frequenza massima in uscita fout [Hz] 600
Temperatura ambiente Tamb [°C] 0 ... +55 3)
Velocità dell’aria di raffreddamento (solo versione “push-through”) Vcooling [m/s] 3
Peso (confezione inclusa) [kg] 2.2 3.1
Dimensioni versione “cold plate” 2) 4) 6) l x h x p [mm] 88 x 287 x 121 132 x 287 x 121
Dimensions versione standard e “push-through” 2) 4) l x h x p [mm] 88 x 247 x 176 132 x 247 x 176
Collegamenti di controllo
Tutti i collegamenti di controllo devono essere isolati dallamassa dell’azionamento. Tutti i collegamenti di controllohanno il medesimo potenziale di riferimento.
Dati elettrici Caratteristiche aggiuntive
Tensione alimentazione sezione di controllo GND, 24 V DC, 0.5 A 1) 20 … 30 V DC
Ingressi digitali 4 x 24 V DC parametrizzabili
Uscita digitale 24 V DC, 0.7 A protette contro cortocircuito, Imax 1.4 A
Funzione di scollegamento di sicurezza 24 V DC 2x ingressi, 1x uscita,1x tensione alimentazione, 18 … 30 V DC
Freno di stazionamento del motore 24 V DC, 1.5 A 18 … 30 V DC
Ingresso analogico -10 V … +10 V o-20 mA … +20 mA configurable
Interfacce di comunicazione 2x CAN bus integrate
Ingresso resolver 9-pin SUB-D
Collegamento encoder 9-pin SUB-D è possibile selezionare:1) Ingresso encoder 2) Encoder simulato3) Uscita encoder
1) La corrente per l’uscita digitale deve essere considerata per dimensionare l’alimentazione a 24 V.

DrivesServoinverter ECS
1
1-73Drives, motori, automazione 10/2006
Moduli alimentatore
I moduli alimentatori forniscono la tensione continua per imoduli asse. In termini di taglie e struttura, gli alimentatorisono identici ai moduli asse e possono essere installatiaffiancati ad essi.
Caratteristiche:˘ Alimentazione dei moduli multiasse via DC-bus˘ Installazione/disinstallazione rapida, grazie alle
morsettiere ad innesto˘ Selettore indirizzo/baud rate per il system bus˘ Controllo della carica del DC bus˘ Comunicazione via system bus CAN (integrato) per il
trasferimento dei parametri e diagnostica˘ Comunicazione dei parametri tramite moduli AIF ˘ Chopper di frenatura integrato˘ Resistenza di frenatura integrata con termocontatto
(assente nella versione cold plate)˘ Collegamento per resistenza di frenatura opzionale
esterna, completa di termocontatto
˘ Rilevamento automatico della tensione di rete eadattamento della tensione di commutazione del chopperdi frenatura
˘ Rilevamento accensione del DC bus per dispersione a terrae cortocircuito
˘ Rilevamento e controllo mancanza fase˘ Rilevamento corrente lato rete˘ 2 ingressi digitali, 1 uscita digitale
Varianti disponibili:˘ Standard (installazione a parete) con ventilatore integrato˘ Versione push-through (separazione termica) senza
ventilatore integrato˘ Versione cold plate
Alimentatori con recupero in reteIn alternativa all’alimentatore passivo, sono disponibili anchealimentatori con recupero dell’energia in rete. Vedere a pag. 1-84.
Morsettiere estraibili dei moduli alimentatori (la figuraillustra la versione standard tipo ECSEE020)
Connettore system bus CAN
I/O digitali per messaggi di stato
Rete dialimentazione
Collegamento per resistenzadi frenatura esterna
Uscita DC bus
Innesto per moduli di comunicazione omodulo LECOM
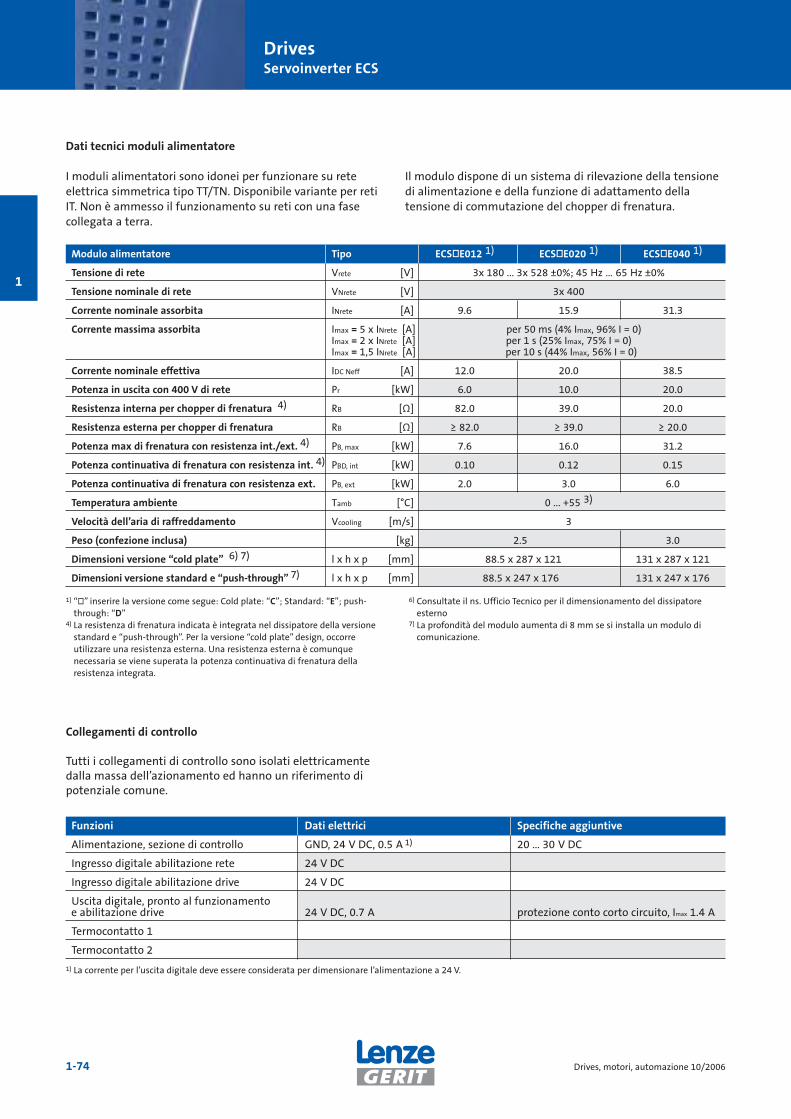
DrivesServoinverter ECS
1
1-74 Drives, motori, automazione 10/2006
Dati tecnici moduli alimentatore
I moduli alimentatori sono idonei per funzionare su reteelettrica simmetrica tipo TT/TN. Disponibile variante per retiIT. Non è ammesso il funzionamento su reti con una fasecollegata a terra.
1) “ò” inserire la versione come segue: Cold plate: “C”; Standard: “E”; push-through: “D”
4) La resistenza di frenatura indicata è integrata nel dissipatore della versionestandard e “push-through”. Per la versione “cold plate” design, occorreutilizzare una resistenza esterna. Una resistenza esterna è comunquenecessaria se viene superata la potenza continuativa di frenatura dellaresistenza integrata.
6) Consultate il ns. Ufficio Tecnico per il dimensionamento del dissipatoreesterno
7) La profondità del modulo aumenta di 8 mm se si installa un modulo dicomunicazione.
Modulo alimentatore Tipo ECSòòE012 1) ECSòòE020 1) ECSòòE040 1)
Tensione di rete Vrete [V] 3x 180 ... 3x 528 ±0%; 45 Hz … 65 Hz ±0%
Tensione nominale di rete VNrete [V] 3x 400
Corrente nominale assorbita INrete [A] 9.6 15.9 31.3
Corrente massima assorbita Imax = 5 x INrete [A] per 50 ms (4% Imax, 96% I = 0)Imax = 2 x INrete [A] per 1 s (25% Imax, 75% I = 0)Imax = 1,5 INrete [A] per 10 s (44% Imax, 56% I = 0)
Corrente nominale effettiva IDC Neff [A] 12.0 20.0 38.5
Potenza in uscita con 400 V di rete Pr [kW] 6.0 10.0 20.0
Resistenza interna per chopper di frenatura 4) RB [Ω] 82.0 39.0 20.0
Resistenza esterna per chopper di frenatura RB [Ω] ≥ 82.0 ≥ 39.0 ≥ 20.0
Potenza max di frenatura con resistenza int./ext. 4) PB, max [kW] 7.6 16.0 31.2
Potenza continuativa di frenatura con resistenza int. 4) PBD, int [kW] 0.10 0.12 0.15
Potenza continuativa di frenatura con resistenza ext. PB, ext [kW] 2.0 3.0 6.0
Temperatura ambiente Tamb [°C] 0 ... +55 3)
Velocità dell’aria di raffreddamento Vcooling [m/s] 3
Peso (confezione inclusa) [kg] 2.5 3.0
Dimensioni versione “cold plate” 6) 7) l x h x p [mm] 88.5 x 287 x 121 131 x 287 x 121
Dimensioni versione standard e “push-through” 7) l x h x p [mm] 88.5 x 247 x 176 131 x 247 x 176
Collegamenti di controllo
Tutti i collegamenti di controllo sono isolati elettricamentedalla massa dell’azionamento ed hanno un riferimento dipotenziale comune.
Funzioni Dati elettrici Specifiche aggiuntive
Alimentazione, sezione di controllo GND, 24 V DC, 0.5 A 1) 20 … 30 V DC
Ingresso digitale abilitazione rete 24 V DC
Ingresso digitale abilitazione drive 24 V DC
Uscita digitale, pronto al funzionamentoe abilitazione drive 24 V DC, 0.7 A protezione conto corto circuito, Imax 1.4 A
Termocontatto 1
Termocontatto 2
1) La corrente per l’uscita digitale deve essere considerata per dimensionare l’alimentazione a 24 V.
Il modulo dispone di un sistema di rilevazione della tensionedi alimentazione e della funzione di adattamento dellatensione di commutazione del chopper di frenatura.

DrivesServoinverter ECS
1
1-75Drives, motori, automazione 10/2006
Moduli condensatore
Il servo sistema ECS è ideale per applicazioni multiasse adelevata dinamica. In funzione di esigenze specifiche, i modulicondensatore permettono il funzionamento in applicazioniche richiedono un significativo aumento della potenza del DCbus per i periodi di tempo lunghi. Questi moduliottimizzeranno la capacità richiesta al DC bus.
Dati tecnici
1) “ò” inserire la versione come segue: Cold plate: “C”; Standard: “E”; push-through: “D”
Modulo condensatore tipo1) ECSòK001 ECSòK002
Capacità [μF] 705 1410
Potenza nominale [kW] 10.0 20.0
Tensione DC bus UDC [V] 0 ... 770
Temperatura ambiente Tamb [°C] 0 ... +55
Velocità dell’aria di raffreddamento (solo per versione push-through) Non sono richieste misure specifiche
Peso (inclusa la confezione) [kg] 2.0 3.1
Dimensioni senza staffe di fissaggio e moduli AIF (l x p x h) [mm]
Versione cold plate 88.5 x 286 x 121 132 x 286 x 121Versione standard e push-through 88.5 x 247 x 176 132 x 247 x 176
Usare la seguente formula per una valutazione preliminare del modulo condensatore e se è necessario:
Capacità totale del DC-bus [μF] [μF]Media temporale della potenza totale di tutti i moduli asse [kW] = kc [kW]
Se kc ≥ 100 [μF/kW], il modulo aggiuntivo non è necessario.
Esempio: Tre assi lavorano con posizionamenti ciclici, con il profilo triangolare e una pausa con il seguente rapporto temporale:Accelerazione: Frenatura: Pausa = 1:1:1La seguente equazione è idonea a questo profilo di movimento 1): Potenza media = Potenza richiesta x 0.222
Esigenza: Potenza richiesta 2x 2.2 kW + 1x 5.5 kWModuli asse impiegati: 2x EXSòA008 + 1x ECSòA016Somma delle capacità del DC bus: 3x 165 μF = 495 μFPotenza media: ((2x 2.2 kW) + 5.5 kW) x 0.222 = 2.2 kW
kc= 495 μF = 225 [μF]2.2 kW [kW]
Se kc > 100 μF/kW, il modulo aggiuntivo non è necessario.
In caso di dubbi sui calcoli, contattate con fiducia il nostro Ufficio Tecnico.
1) Per informazioni più dettagliate sui calcoli, consultate il formulario Lenze.
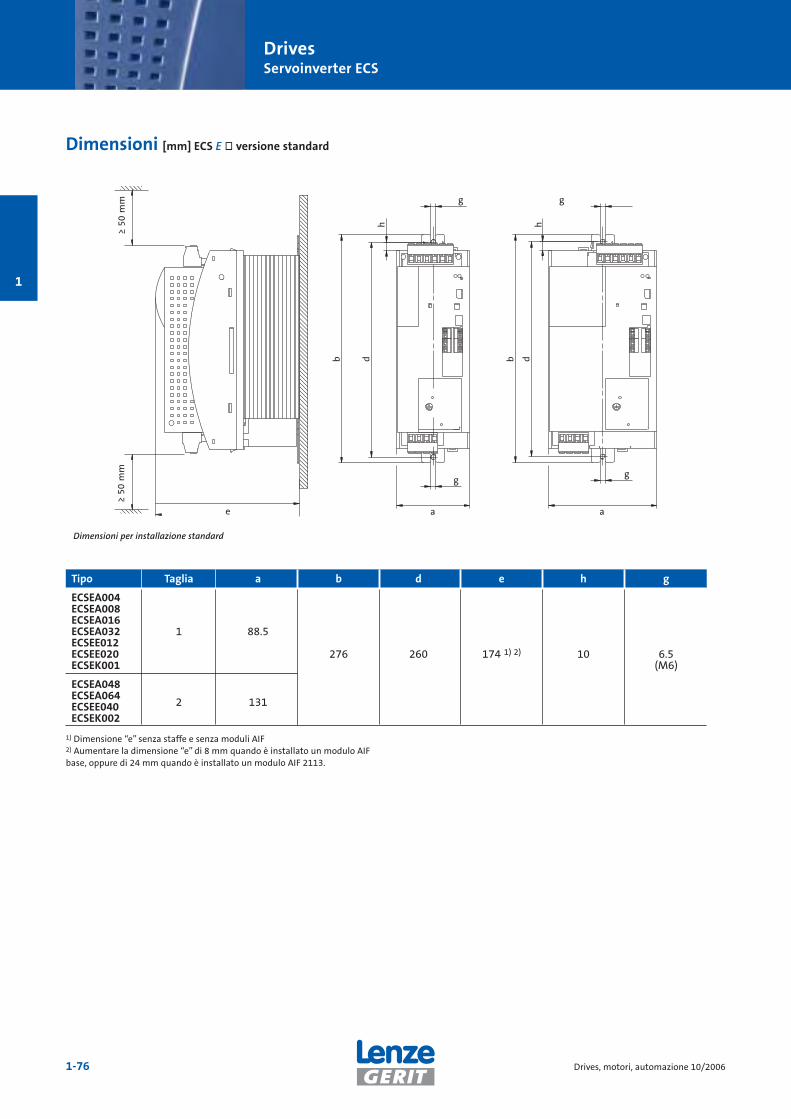
DrivesServoinverter ECS
1
1-76 Drives, motori, automazione 10/2006
Dimensioni [mm] ECS E ò versione standard
h h
e a
g
db
g
a
db
g g
≥50
mm
≥50
mm
Dimensioni per installazione standard
Tipo Taglia a b d e h g
ECSEA004ECSEA008ECSEA016ECSEA032 1 88.5ECSEE012ECSEE020 276 260 174 1) 2) 10 6.5ECSEK001 (M6)
ECSEA048ECSEA064
2 131ECSEE040ECSEK002
1) Dimensione “e” senza staffe e senza moduli AIF 2) Aumentare la dimensione “e” di 8 mm quando è installato un modulo AIFbase, oppure di 24 mm quando è installato un modulo AIF 2113.

DrivesSoftware
1
1-77Drives, motori, automazione 10/2006
Funzionalità,
semplicità, potenza
Caratteristiche˘ non è richiesta alcuna conoscenza di programmazione˘ messa in servizio semplice e rapida tramite il menù "short
commissioning"˘ numerose funzioni di aiuto facilitano le operazioni anche
agli utenti meno esperti˘ sono disponibili numerose funzioni tecnologiche per la
soluzione dei problemi applicativi˘ funzioni di diagnostica e di monitoraggio˘ funzioni di oscilloscopio (solo per i drive serie 9300)˘ editor per la configurazione dei blocchi funzione˘ semplice collegamento ai drive via RS232/485, fibra ottica
o System-bus CAN
G.D.C.: Global Drive Control
I drive intelligenti sono sempre più impiegati nei moderniimpianti di produzione. Essi, oltre ai compiti convenzionali,svolgono funzioni tecnologiche nei processi di produzione.Global Drive Control è uno strumento versatile e completo peril controllo, l'impostazione dei parametri e la diagnostica ditutti dispositivi Lenze (drives, I/O, PLC).
DrivesSoftware
1
1-78 Drives, motori, automazione 10/2006
Short CommissioningQuesto menù consente una messa in servizio facile ed intuitiva,grazie ad un interfaccia estremamente semplice. Tutti i parametri richiesti per la messa a punto dell’inverter posso-no essere impostati direttamente nelle apposite finestre. È possibile selezionare in modo rapido e confortevole la propriaapplicazione, il tipo di motore, il trasduttore, la configurazionedegli ingressi e delle uscite digitali ed analogiche.Sono comunque disponibili ulteriori funzioni di settaggio del dri-ve, con descrizione dettagliata per tutti i singoli parametri.Oltre alla possibilità di lavorare con qualsiasi tipo di motore, leoperazioni di messa in servizio sono ulteriormente snellite impie-gando i motori del programma Lenze. Global Drive Control dispone infatti d'un aggiornato data base coni dati dei motori, dei trasduttori e degli inverter Lenze. Aprendo ilmenù di selezione è pertanto sufficiente scegliere il modelloimpiegato per ottenere la configurazione automatica dell’inverter.

DrivesSoftware
1
1-79Drives, motori, automazione 10/2006
Function Block Editor Ogni applicazione richiede una specifica configurazione o pro-gramma. I drive Lenze serie 9300 sono apparecchiature estre-mamente versatili e dispongono, a questo scopo, di numerosiblocchi funzione e aritmetici liberamente configurabili dall’u-tente mediante dei codici. É pertanto possibile costruire all’in-terno del drive molte delle funzioni che fino ad oggi eranodelegate a PLC o a schede elettroniche dedicate, determinan-do un concreto risparmio.Per semplificare la programmazione degli inverter 9300 vector,dei servoinverter 9300 (esclusa la versione Servo PLC) ed ECS, ilGDC fornisce ulteriori funzioni dedicate.Le funzionalità di queste apparecchiature sono descritte dauna struttura a blocchi funzione che si genera automatica-mente operando con lo short commissioning.
I singoli blocchi funzione rappresentano unità di funzioni rag-gruppate intelligentemente, con ingressi e uscite.Il function block editor consente la configurazione dei blocchifunzione ed aritmetici, senza richiedere nessuna particolareabilità di programmazione.Ad esempio si possono costruire algoritmi per ottimizzare ilfunzionamento d’un ballerino, una cella di carico o un calcola-tore di diametro. Un ulteriore vantaggio offerto dalla configu-razione individuale è la possibilità di proteggere la soluzioneadottata da duplicazioni indesiderate.
Funzioni disponibili per le apparecchiature serie 9300
Funzioni matematiche: operazioni aritmetiche
Funzioni drive: logica controllo freno
posizionatore
controllo motore
riduttore elettronico
Esempi di blocchi funzione
Operazioni logiche: AND, OR, NOT
Moduli di interfaccia: Ingressi/uscite digitali,
System bus
Moduli Fieldbus
Vantaggi˘ semplicità operativa˘ non è richiesta capacità di programmazione˘ libreria moduli di funzione˘ help in linea
"Saldatore" per collegareingressi ed uscite
"Forbice"

DrivesSoftware
1
1-80 Drives, motori, automazione 10/2006
Funzione Oscilloscopio (solo per servoinverter)
In sistemi complessi può essere difficoltoso determinare perun singolo azionamento il valore effettivo di velocità o coppia.La messa in servizio di questi sistemi diventa più facile quan-do questi valori sono noti.
La funzione oscilloscopio integrata nel GDC è dedicata ai ser-voinverter 9300. Questa funzione rende superfluo collegaresofisticati strumenti di misura. Tutte le variabili sono misuratee visualizzate via software su PC.
Per i servoinverter ECS e servo PLC la funzione oscilloscopio èfornita da un software dedicato GDO (Global Drive Oscillosco-pe).
La funzione oscilloscopio offre i seguenti importanti vantaggi:˘ Misurazione precisa di specifiche variabili di processo
senza utilizzare strumenti di misura aggiuntivi˘ Non si richiede l’installazione di strumenti provvisori˘ Comoda documentazione della taratura degli anelli di
regolazione ˘ Manutenzione e messa in servizio semplice
Caratteristiche˘ misurazione di tutti i segnali analogici˘ misurazione simultanea fino ad un massimo di quattro
canali indipendenti˘ trigger su segnali digitali o analogici˘ pre- e post-triggering˘ funzioni cursore e zoom per l’analisi delle misurazioni˘ frequenza di scansione variabile ˘ facile comparazione delle misurazioni grazie alla funzione
overlay˘ le misure possono essere caricate, salvate, commentate e
stampate
Requisiti hardware:˘ Personal computer IBM-AT o PC compatibile˘ CPU: 80486 o superiore / Pentium˘ 16 MB RAM˘ 30 MB disponibili su disco fisso˘ Monitor Super VGA ˘ Lettore CD ROM ˘ Porta seriale RS232/fibra ottica o˘ Porta parallela per adattatore system bus (CAN)
Requisiti software:˘ Windows 3.1x o Windows 95 / 98 / NT 4.0

DrivesSoftware
1
1-81Drives, motori, automazione 10/2006
Semplicità e potenza
CamDesigner è uno strumento molto potente, studiato per laprogettazione di profili di movimento per i servodrive 9300 EK,ECS e Servo PLC con template Camma. Con CamDesigner è pos-sibile introdurre la forma del profilo desiderato semplicemen-te disegnandola col mouse, importandola da fogli elettronicioppure inserendo manualmente le coordinate di ogni punto. Ilprofilo viene realizzato tramite una rete neurale, in grado difornire la distribuzione ottimale dei singoli punti.Questo software è un plug-in di Global Drive Control e pertan-to ne condivide la semplicità d’interfaccia
Caratteristiche˘ Dati inseribili direttamente in unità ingegneristiche˘ Un sistema esperto effettua la generazione automatica
delle connessioni conformemente alle leggi di motosecondo VDI 2143 (tramite polinomi del 5° ordine).
˘ Visualizzazione grafica profilo di velocità, accelerazione e discontinuità
Requisiti Software˘ Windows 95/98NT/4.0˘ Global Drive Control V4.0 o superiore
Requisiti Hardware˘ Cpu 486 DX/33 o superiore / Pentium˘ 32 MB memoria RAM˘ 30 MB disponibili su disco fisso˘ Monitor Super VGA ˘ Mouse compatibile Microsoft˘ Lettore CD ROM
Cam Designer

DrivesSoftware
1
1-82 Drives, motori, automazione 10/2006
Schema a contatti
Lista istruzioni Diagramma di flussoBlocchi funzioni
Testo strutturato
Requisuti hardware:˘ PC IBM-compatibile (Pentium 90 MHz o superiore)˘ 32 MB (RAM)˘ 80 MB liberi su disco fisso˘ scheda grafica Super VGA˘ mouse Microsoft-compatibile ˘ drive CD ROM ˘ interfaccia parallela o USB per la comunicazione tramite
apposita interfaccia, tipo: EMF2173IB
Requisiti software:˘ Windows 98/ME/NT 4.0 SP5 o sup./2000 SP2 o sup./XP
Si tratta d'un ambiente di sviluppo software ad elevate pre-stazioni sviluppato sulla piattaforma Windows e studiato perla programmazione e la messa in servizio di Servo PLC, ECS eDrive PLC. Drive Developer Studio rende disponibili tutte le funzioni e glistrumenti richiesti da un esperto programmatore di PLC.Sono disponibili gli editor per i cinque diversi linguaggi diprogrammazione secondo lo standard IEC1131-3. Questoconsente al programmatore di poter scegliere, in base allesue competenze, il linguaggio che meglio soddisfa le esigenzedella propria applicazione. Sono disponibili anche le funzionidi simulazione, debugger e monitoraggio che permettono lavisualizzazione dei valori di tutte le variabili e rendono possi-bile una semplice ottimizzazione dei programmi.Il programma supporta la visualizzazione grafica dell’applica-zione, rendendo intuitivo il processo produttivo.
Massima semplicità˘ Possibilità di scelta tra cinque linguaggi di
programmazione in conformità allo standard IEC 1131-3(utilizzabili anche in combinazione tra loro).
˘ Messa a punto facilitata da debug a passi e punti diinterruzione
˘ Monitoraggio di tutte le variabili˘ Gestione password per differenti livelli d’accesso ai
parametri.˘ Possibilità di selezionare liberamente il tempo di ciclo.˘ Simulazione del programma PLC sul PC˘ Capiente libreria per il controllo dei drive Lenze˘ Calcolo matematico a 32 bit e virgola mobile˘ Possibilità di gestire facilmente programmi su base
temporale e/o su eventi
DDS: Drive Developer Studio

DrivesSoftware
1
1-83Drives, motori, automazione 10/2006
Visualizzazione
Debug
Interfaccia CAN/USB e CAN/PS2
Queste interfacce sono indispensabili per poter collegare unPC al systembus CAN delle apparecchiature Lenze. Tutti i dispo-sitivi Lenze saranno visualizzati automaticamente tramitesoftware Global Drive Control (GDC).
Versioni disponibili:˘ Tipo EMF2177IB, interfaccia CAN/USB˘ Tipo EMF2173IB-V002, interfaccia CAN/PS2 (porta
parallela)˘ Tipo EMF2173IB-V003, interfaccia CAN/PS2(porta
parallela) versione con separazione galvanica
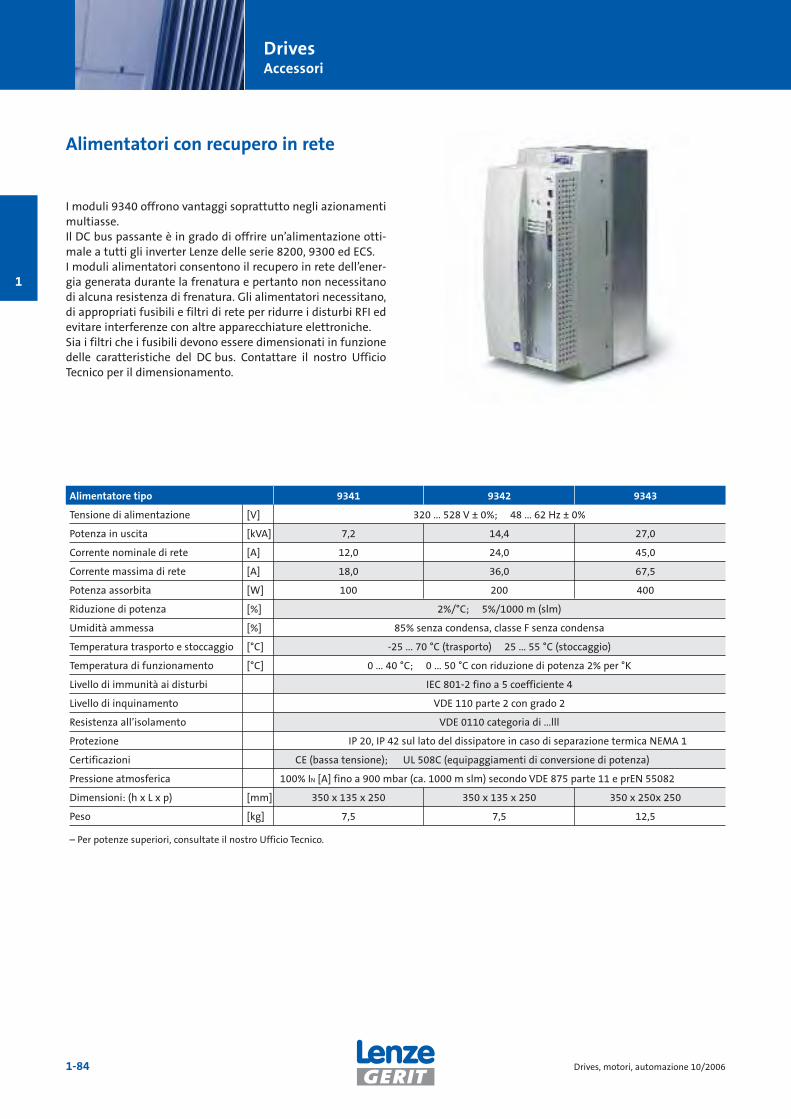
DrivesAccessori
1
1-84 Drives, motori, automazione 10/2006
Alimentatori con recupero in rete
I moduli 9340 offrono vantaggi soprattutto negli azionamentimultiasse. Il DC bus passante è in grado di offrire un’alimentazione otti-male a tutti gli inverter Lenze delle serie 8200, 9300 ed ECS. I moduli alimentatori consentono il recupero in rete dell’ener-gia generata durante la frenatura e pertanto non necessitanodi alcuna resistenza di frenatura. Gli alimentatori necessitano,di appropriati fusibili e filtri di rete per ridurre i disturbi RFI edevitare interferenze con altre apparecchiature elettroniche. Sia i filtri che i fusibili devono essere dimensionati in funzionedelle caratteristiche del DC bus. Contattare il nostro UfficioTecnico per il dimensionamento.
Alimentatore tipo 9341 9342 9343
Tensione di alimentazione [V] 320 ... 528 V ± 0%; 48 ... 62 Hz ± 0%
Potenza in uscita [kVA] 7,2 14,4 27,0
Corrente nominale di rete [A] 12,0 24,0 45,0
Corrente massima di rete [A] 18,0 36,0 67,5
Potenza assorbita [W] 100 200 400
Riduzione di potenza [%] 2%/°C; 5%/1000 m (slm)
Umidità ammessa [%] 85% senza condensa, classe F senza condensa
Temperatura trasporto e stoccaggio [°C] -25 ... 70 °C (trasporto) 25 ... 55 °C (stoccaggio)
Temperatura di funzionamento [°C] 0 ... 40 °C; 0 ... 50 °C con riduzione di potenza 2% per °K
Livello di immunità ai disturbi IEC 801-2 fino a 5 coefficiente 4
Livello di inquinamento VDE 110 parte 2 con grado 2
Resistenza all’isolamento VDE 0110 categoria di ...lll
Protezione IP 20, IP 42 sul lato del dissipatore in caso di separazione termica NEMA 1
Certificazioni CE (bassa tensione); UL 508C (equipaggiamenti di conversione di potenza)
Pressione atmosferica 100% IN [A] fino a 900 mbar (ca. 1000 m slm) secondo VDE 875 parte 11 e prEN 55082
Dimensioni: (h x L x p) [mm] 350 x 135 x 250 350 x 135 x 250 350 x 250x 250
Peso [kg] 7,5 7,5 12,5
– Per potenze superiori, consultate il nostro Ufficio Tecnico.

DrivesAccessori
1
1-85Drives, motori, automazione 10/2006
Alimentatore L1, L2, L3, PE +UG, –UG
Tipo Fusibile Sezione cavi Fusibile Sezione caviVDE UL [mm2] AWG [mm2] AWG
9341 M 16A 15A 2,5 13 (12) 20A 2,5 12
9342 M 32A 30A 6,0 9 (8) 40A 6 8
9343 M 50A 50A 16 5 (4) 80A 16 4
Fusibili per moduli 9340
Alimentatori senza recupero in rete
I moduli 9360 sono del tutto simili ai moduli 9340 ma non con-sentono il recupero dell’energia in rete. L’energia, generatadurante la frenatura, è resa disponibile sul Bus DC e consenteun risparmio energetico nelle applicazioni multiasse. Il DC buspassante è in grado di offrire un’alimentazione ottimale a tut-ti gli inverter Lenze delle serie 8200, 9300 ed ECS.
Gli alimentatori necessitano, di appropriati fusibili e filtri direte per ridurre i disturbi RFI ed evitare interferenze con altreapparecchiature elettroniche.Sia i filtri che i fusibili devono essere dimensionati in funzionedelle caratteristiche del DC bus. Contattare il nostro UfficioTecnico per il dimensionamento.
Alimentatore tipo EME9364-E EME9365-E
Tensione di alimentazione [V] 100 ... 550 V ± 0%; 48 ... 62 Hz ± 0%
Alimentazione ventilatore separato [V] 1 CA / 230 V, 50/60 Hz
Potenza in uscita [kVA] 51 103
Corrente nominale di rete IRete [A] 12,0 24,0
Corrente massima di rete Imax [A] 74 148
Potenza assorbita [W] 111 222
Tensione DC Bus UDC [VCC] 150...780 ± 0%;
Corrente DC Bus IDC [ACC] 90 180
Corrente massima DC Bus IDCmax [ACC] 135 270
Potenza effettiva in uscita PN [kW] 50 100
Potenza massima in uscita Pmax [kW] 75 150
Potenza dissipata [kW] 0,173 0,389
Umidità ammessa [%] 85% senza condensa, classe F senza condensa
Temperatura trasporto e stoccaggio [°C] -25 ... 70 °C (trasporto) 25 ... 55 °C (stoccaggio)
Temperatura di funzionamento [°C] 0 ... 40 °C; 0 ... 55 °C con riduzione di potenza 2% per °K
Altitudine [m] 0...1000; 1000...4000 con riduzione di potenza 5% per 1000 m (slm)
Livello di immunità ai disturbi Secondo EN50081-2, EN50082-1, IEC 224-WGH (CV) 21. e di emissione La conformità alla classe A, EN55011 (aree industriali), si ottiene
impiegando un filtro di rete classe B
Livello di inquinamento VDE 110 parte 2 con grado 2
Resistenza all’isolamento VDE 0110 categoria di ...lll
Protezione IP 20
Certificazioni CE (bassa tensione e EMC)
Dimensioni: (l x p x h) [mm] 280 x 175 x 220 280 x 175 x 220
Peso m [kg] 4,8 5,8

DrivesAccessori
1
1-86 Drives, motori, automazione 10/2006
8200 vector Rete Potenza Codice filtro a a1 a2 b b1 b2 b3 c Peso
[V] [kW] [mm] [kg]
E82EV251K2C200 0,25 LL: E82ZZ37112B220
E82EV371K2C200 0,37 SD: E82ZZ37112B200 60 25 10 217 197 172 145 30 0,5
LD: E82ZZ37112B210
E82EV551K2C200 1~ 0,55 LL: E82ZZ75112B200
E82EV751K2C200 230 0,75 LD: E82ZZ75112B200 60 25 10 277 247 232 210 40 0,8
LD: E82ZZ75112B210
E82EV152K2C200 1,5 SD: E82ZZ22212B20060 25 10 337 317 292 266 40 0,9
E82EV222K2C200 2,2 LD: E82ZZ22212B210
E82EV551K2C200 0,55 SD: E82ZZ75132B20060 25 10 277 247 232 210 40 0,8
E82EV751K2C200 3~ 0,75 LD: E82ZZ75132B210
E82EV152K2C200 230 1,5 SD: E82ZZ22232B20060 25 10 337 317 292 266 40 0,9
E82EV222K2C200 2,2 LD: E82ZZ22232B210
E82EV551K4C200 0,55 SD: E82ZZ75134B20060 25 10 277 247 232 210 40 0,8
E82EV751K4C200 3~ 0,75 LD: E82ZZ75134B210
E82EV152K4C200 400/500 1,5 SD: E82ZZ22234B20060 25 10 337 317 292 266 40 0,9
E82EV222K4C200 2,2 LD: E82ZZ22234B210
E82EV302K2C200 3,0 SD: E82ZZ40232B200100 12,5 75 337 317 292 266 60 1,7
E82EV402K2C200 3~ 4,0 LD: E82ZZ40232B210
E82EV552K2C200 230 5,5 SD: E82ZZ75232B200125 25 75 337 317 292 266 60 2,1
E82EV752K2C200 7,5 LD: E82ZZ75232B210
E82EV302K4C200 3,0
E82EV402K4C200 3~ 4,0SD: E82ZZ55234B200
100 12,5 75 337 317 292 266 60 1,7
E82EV552K4C200 400/500 5,5LD: E82ZZ55234B210
E82EV752K4C200 7,5 SD: E82ZZ11334B200125 25 75 337 317 292 266 60 2,2
E82EV113K4C200 11,0 LD: E82ZZ11334B210
LL = bassissima dispersione < 3,5 mA. SD = bassa dispersione per differenziale da 30 mA, cavi motore corti. LD = per lunghi cavi motore
Filtri RFI da montare sotto gli inverter 8200 vector 0,25...11 kW
a
c
b
M6 x 15
a1
Linea
b1
b3
b2
a2
Carico
b2b3
b1
a2a1
6,5
(M6)
6,5
(M6)
Per inverter fino a 2,2 kW
Per inverter oltre 2,2 kW
Filtri RFI
I filtri oltre a limitare la corrente in ingresso sono indispensa-bili per ridurre i disturbi RFI ed evitare interferenze con altreapparecchiature elettroniche. Per quanto riguarda i disturbiRFI le normative prevedono due classi di protezione:
˘ classe A richiesta in ambito industriale (reti collegateindirettamente a siti abitativi o commerciali)
˘ classe B richiesta negli impieghi commerciali e residenziali.
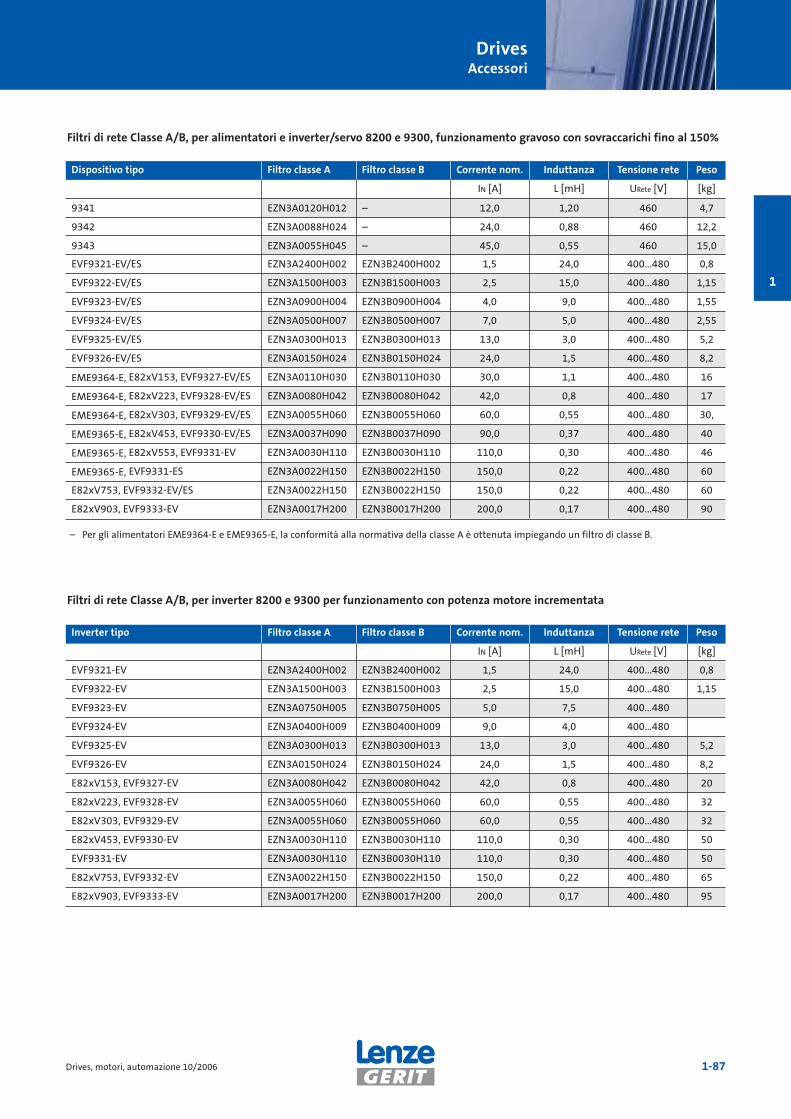
DrivesAccessori
1
1-87Drives, motori, automazione 10/2006
Dispositivo tipo Filtro classe A Filtro classe B Corrente nom. Induttanza Tensione rete Peso
IN [A] L [mH] URete [V] [kg]
9341 EZN3A0120H012 – 12,0 1,20 460 4,7
9342 EZN3A0088H024 – 24,0 0,88 460 12,2
9343 EZN3A0055H045 – 45,0 0,55 460 15,0
EVF9321-EV/ES EZN3A2400H002 EZN3B2400H002 1,5 24,0 400...480 0,8
EVF9322-EV/ES EZN3A1500H003 EZN3B1500H003 2,5 15,0 400...480 1,15
EVF9323-EV/ES EZN3A0900H004 EZN3B0900H004 4,0 9,0 400...480 1,55
EVF9324-EV/ES EZN3A0500H007 EZN3B0500H007 7,0 5,0 400...480 2,55
EVF9325-EV/ES EZN3A0300H013 EZN3B0300H013 13,0 3,0 400...480 5,2
EVF9326-EV/ES EZN3A0150H024 EZN3B0150H024 24,0 1,5 400...480 8,2
EME9364-E, E82xV153, EVF9327-EV/ES EZN3A0110H030 EZN3B0110H030 30,0 1,1 400...480 16
EME9364-E, E82xV223, EVF9328-EV/ES EZN3A0080H042 EZN3B0080H042 42,0 0,8 400...480 17
EME9364-E, E82xV303, EVF9329-EV/ES EZN3A0055H060 EZN3B0055H060 60,0 0,55 400...480 30,
EME9365-E, E82xV453, EVF9330-EV/ES EZN3A0037H090 EZN3B0037H090 90,0 0,37 400...480 40
EME9365-E, E82xV553, EVF9331-EV EZN3A0030H110 EZN3B0030H110 110,0 0,30 400...480 46
EME9365-E, EVF9331-ES EZN3A0022H150 EZN3B0022H150 150,0 0,22 400...480 60
E82xV753, EVF9332-EV/ES EZN3A0022H150 EZN3B0022H150 150,0 0,22 400...480 60
E82xV903, EVF9333-EV EZN3A0017H200 EZN3B0017H200 200,0 0,17 400...480 90
Filtri di rete Classe A/B, per alimentatori e inverter/servo 8200 e 9300, funzionamento gravoso con sovraccarichi fino al 150%
Filtri di rete Classe A/B, per inverter 8200 e 9300 per funzionamento con potenza motore incrementata
– Per gli alimentatori EME9364-E e EME9365-E, la conformità alla normativa della classe A è ottenuta impiegando un filtro di classe B.
Inverter tipo Filtro classe A Filtro classe B Corrente nom. Induttanza Tensione rete Peso
IN [A] L [mH] URete [V] [kg]
EVF9321-EV EZN3A2400H002 EZN3B2400H002 1,5 24,0 400...480 0,8
EVF9322-EV EZN3A1500H003 EZN3B1500H003 2,5 15,0 400...480 1,15
EVF9323-EV EZN3A0750H005 EZN3B0750H005 5,0 7,5 400...480
EVF9324-EV EZN3A0400H009 EZN3B0400H009 9,0 4,0 400...480
EVF9325-EV EZN3A0300H013 EZN3B0300H013 13,0 3,0 400...480 5,2
EVF9326-EV EZN3A0150H024 EZN3B0150H024 24,0 1,5 400...480 8,2
E82xV153, EVF9327-EV EZN3A0080H042 EZN3B0080H042 42,0 0,8 400...480 20
E82xV223, EVF9328-EV EZN3A0055H060 EZN3B0055H060 60,0 0,55 400...480 32
E82xV303, EVF9329-EV EZN3A0055H060 EZN3B0055H060 60,0 0,55 400...480 32
E82xV453, EVF9330-EV EZN3A0030H110 EZN3B0030H110 110,0 0,30 400...480 50
EVF9331-EV EZN3A0030H110 EZN3B0030H110 110,0 0,30 400...480 50
E82xV753, EVF9332-EV EZN3A0022H150 EZN3B0022H150 150,0 0,22 400...480 65
E82xV903, EVF9333-EV EZN3A0017H200 EZN3B0017H200 200,0 0,17 400...480 95

DrivesAccessori
1
1-88 Drives, motori, automazione 10/2006
f
mca
db
n
e
k
Filtro classe A, dimensioni [mm]
Codice Fig. a b c d e m n
EZN3A2400H002 A 77 71 50 38 98 5 9
EZN3A1500H003 A 95 82 56 35 115 5 9
EZN3A0900H004 A 95 90 56 43 116 5 9
EZN3A0500H007 A 119 95 90 49 138 5 9
EZN3A0300H013 A 150 106 113 64 162 6 11
EZN3A0150H024 A 180 120 136 67 192 7 12
Filtro classe B, dimensioni [mm]
Codice Fig. a b c d e m n
EZN3B2400H002 B 78 150 – 135 230 6,5 –
EZN3B1500H003 B 78 150 – 135 230 6,5 –
EZN3B0900H004 B 95 180 – 165 230 6,5 –
EZN3B0500H007 B 95 180 – 165 230 6,5 –
EZN3B0300H013 B 135 260 92 245 230 6,5 –
EZN3B0150H024 B 135 260 92 245 230 6,5 –
Dimensioni filtri di rete classe A e B, per inverter/servo 9300, fino a 11 kW
Fig. A
Fig. B
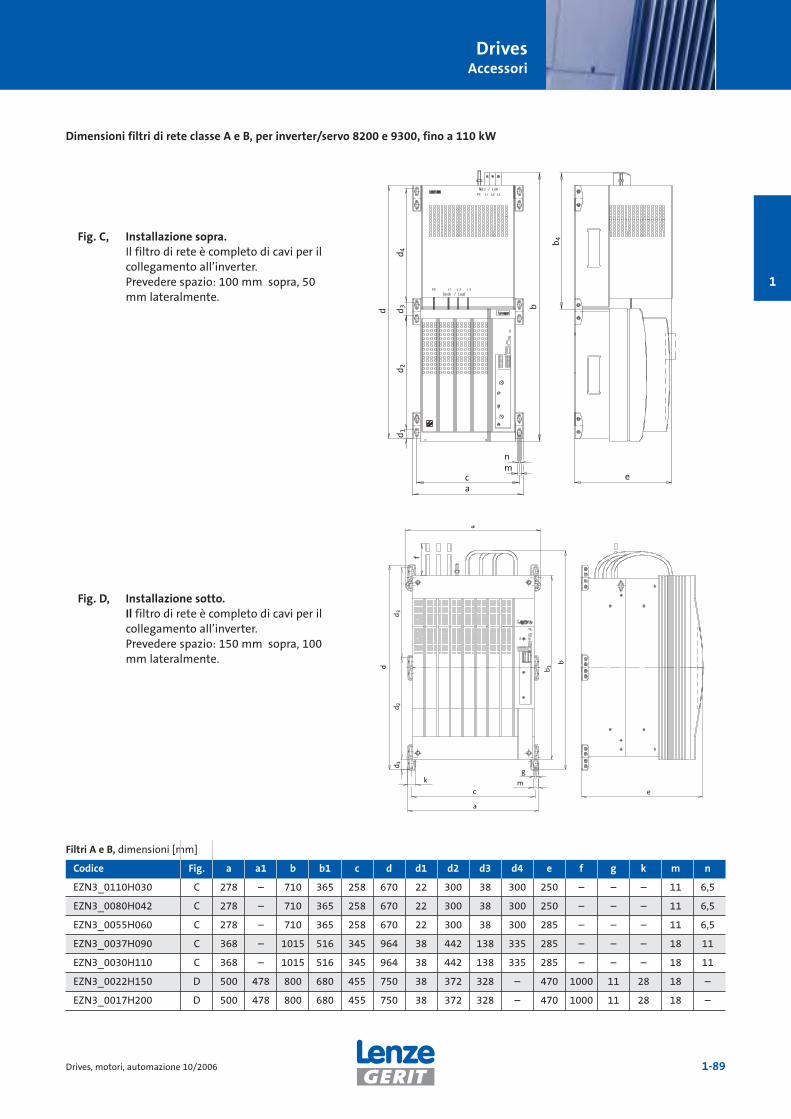
DrivesAccessori
1
1-89Drives, motori, automazione 10/2006
d4
b4
d3
d b
d 2d
1
c ea
nm
Dimensioni filtri di rete classe A e B, per inverter/servo 8200 e 9300, fino a 110 kW
Filtri A e B, dimensioni [mm]
Codice Fig. a a1 b b1 c d d1 d2 d3 d4 e f g k m n
EZN3_0110H030 C 278 – 710 365 258 670 22 300 38 300 250 – – – 11 6,5
EZN3_0080H042 C 278 – 710 365 258 670 22 300 38 300 250 – – – 11 6,5
EZN3_0055H060 C 278 – 710 365 258 670 22 300 38 300 285 – – – 11 6,5
EZN3_0037H090 C 368 – 1015 516 345 964 38 442 138 335 285 – – – 18 11
EZN3_0030H110 C 368 – 1015 516 345 964 38 442 138 335 285 – – – 18 11
EZN3_0022H150 D 500 478 800 680 455 750 38 372 328 – 470 1000 11 28 18 –
EZN3_0017H200 D 500 478 800 680 455 750 38 372 328 – 470 1000 11 28 18 –
Fig. C, Installazione sopra.Il filtro di rete è completo di cavi per ilcollegamento all’inverter.Prevedere spazio: 100 mm sopra, 50mm lateralmente.
d3
d
d2
d1
c
a
g
mk
a
f
b1
b
e
Fig. D, Installazione sotto.Il filtro di rete è completo di cavi per ilcollegamento all’inverter.Prevedere spazio: 150 mm sopra, 100mm lateralmente.
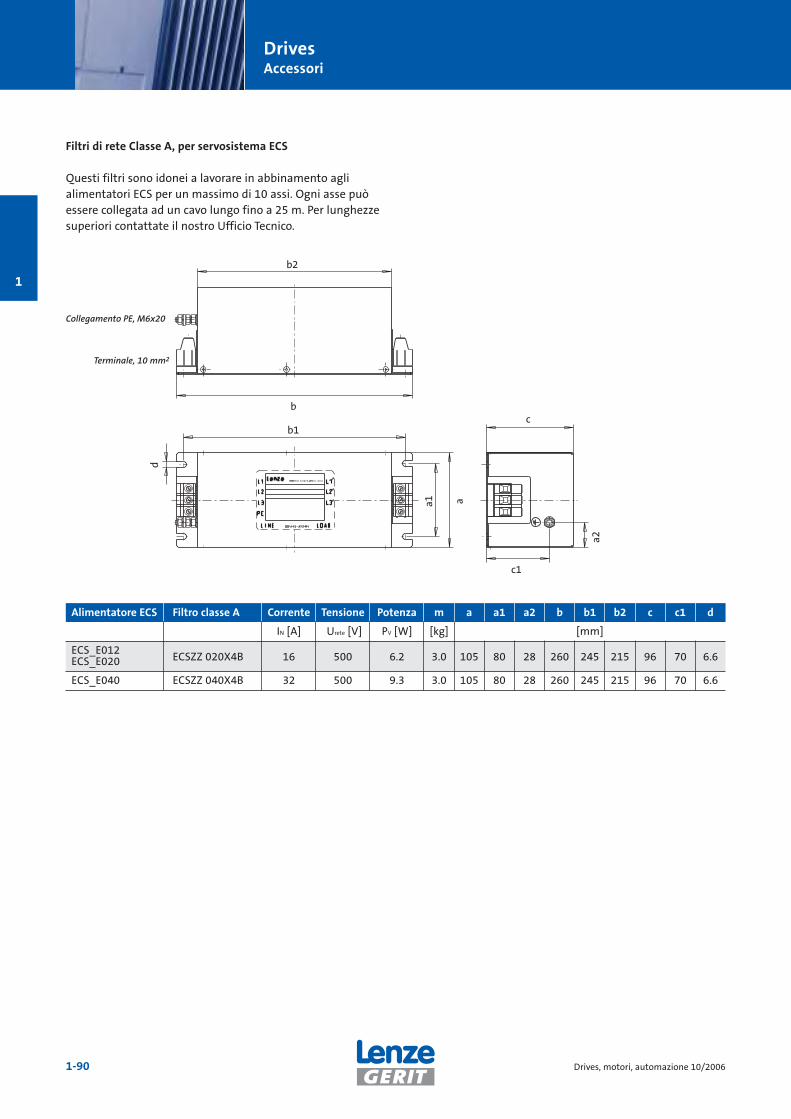
DrivesAccessori
1
1-90 Drives, motori, automazione 10/2006
Filtri di rete Classe A, per servosistema ECS
Questi filtri sono idonei a lavorare in abbinamento aglialimentatori ECS per un massimo di 10 assi. Ogni asse puòessere collegata ad un cavo lungo fino a 25 m. Per lunghezzesuperiori contattate il nostro Ufficio Tecnico.
a
a2
a1
b
b1
b2
c
c1
d
Terminale, 10 mm2
Alimentatore ECS Filtro classe A Corrente Tensione Potenza m a a1 a2 b b1 b2 c c1 d
IN [A] Urete [V] PV [W] [kg] [mm]
ECS_E012ECSZZ 020X4B 16 500 6.2 3.0 105 80 28 260 245 215 96 70 6.6ECS_E020
ECS_E040 ECSZZ 040X4B 32 500 9.3 3.0 105 80 28 260 245 215 96 70 6.6
Collegamento PE, M6x20

DrivesAccessori
1
1-91Drives, motori, automazione 10/2006
Dati tecnici Modulo 9351 Chopper 9352
Tensione di alimentazione [VN] [V] 270 ... 765 270 ... 765
Energia di frenatura massima [Wmax] [kWs] 50 in funzione della resistenza impiegata
Soglia d’intervento: a 400 V [V DC] 630 630a 460 V 725 725a 480 V 765 765
Corrente massima [IN] [A DC] 16 42
Potenza di frenatura continuativa [PN] [kW] 0,1 19
Potenza di frenatura di picco [Pmax] [kW] 12 (ciclo d’intervento fino all’1% ogni 4 s) 32 (ciclo d’intervento fino al 50% ogni 60 s)
Resistenza minima [Ωmin] [Ohm] 47 interna 18 esterna
Temperatura di funzionamento [t] [°C] 0 ... 40 °C 0 ... 40 °C
Temperatura di stoccaggio [t] [°C] -20 ... 70 °C -20 ... 70 °C
Umidità Classe F Classe F
Dimensioni: h x L x p [mm] 384 x 52 x 186 384 x 52 x 186
Peso [m] [kg] 2,6 2,2
PN ≥ tf . Pmax ; Pmax =
1 . Wkin
tcicl 2 tf
Wmax = Pmax . t0max
Sistemi di Frenatura
Quando un motore è soggetto ad una rapida frenata si com-porta da generatore, l’energia prodotta viene inviata all'inver-ter determinando un aumento della tensione nel circuitointermedio. Nel caso in cui la tensione superasse una deter-minata soglia, il convertitore bloccherà gli stadi di potenza eil motore tenderà a fermarsi per inerzia.In questo caso è necessario impiegare un modulo di frenaturacon resistenza integrata oppure un chopper con resistenzaesterna. In questo caso l’azionamento potrà essere frenato inmodo controllato in quanto l’energia prodotta dal motoreverrà deviata sulle resistenze di frenatura e quindi dissipatasotto forma di calore.
Modulo di frenatura 9351 Questo modulo di frenatura è particolarmente compatto e disemplice installazione in quanto la resistenza di frenatura èintegrata nell’apparecchiatura. La resistenza di 47 Ohm con-sente una potenza massima di frenatura di 12 kW in un ciclodi interventi fino all’ 1% ogni 4 s. Per potenze superiori occor-re impiegare il chopper di frenatura 9352 e un’opportunaresistenza esterna.
Chopper di frenatura 9352Questo dispositivo offre la possibilità di un dimensionamentoottimale in funzione della potenza di frenatura. A questo sco-po sono disponibili differenti resistenze esterne. La minimaresistenza di frenatura installabile è di 18 Ohm e una potenzadi 32 kW con un ciclo d’intervento fino al 50% ogni 60 s.
Sia il modulo di frenatura 9351 che il chopper 9352 possonoessere installati direttamente a pacco.
Scelta delle resistenze di frenaturaIl dimensionamento è in funzione della potenza continuativae dell’energia cinetica massima da dissipare. La potenza con-tinuativa di frenata PN deve essere inferiore o uguale ai valoririportati nella tabella sottostante.
Pmax: potenza massima di frenata tf: tempo di frenata impostabile sull’invertertcicl: tempo tra due cicli di frenaturaWkin: energia cinetica da frenareWmax: energia cinetica massima da dissiparet0max: tempo max d’inserzione del chopper di frenatura
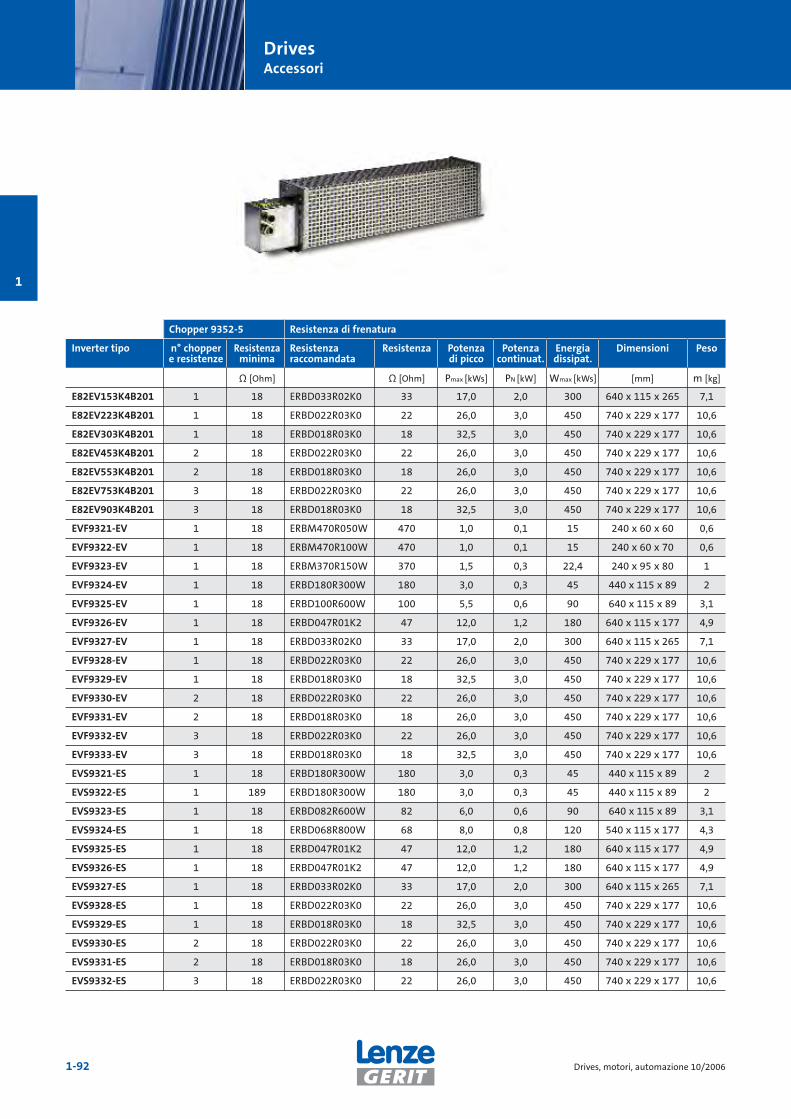
DrivesAccessori
1
1-92 Drives, motori, automazione 10/2006
Chopper 9352-5 Resistenza di frenatura
Inverter tipo n° chopper Resistenza Resistenza Resistenza Potenza Potenza Energia Dimensioni Pesoe resistenze minima raccomandata di picco continuat. dissipat.
Ω [Ohm] Ω [Ohm] Pmax [kWs] PN [kW] Wmax [kWs] [mm] m [kg]
E82EV153K4B201 1 18 ERBD033R02K0 33 17,0 2,0 300 640 x 115 x 265 7,1
E82EV223K4B201 1 18 ERBD022R03K0 22 26,0 3,0 450 740 x 229 x 177 10,6
E82EV303K4B201 1 18 ERBD018R03K0 18 32,5 3,0 450 740 x 229 x 177 10,6
E82EV453K4B201 2 18 ERBD022R03K0 22 26,0 3,0 450 740 x 229 x 177 10,6
E82EV553K4B201 2 18 ERBD018R03K0 18 26,0 3,0 450 740 x 229 x 177 10,6
E82EV753K4B201 3 18 ERBD022R03K0 22 26,0 3,0 450 740 x 229 x 177 10,6
E82EV903K4B201 3 18 ERBD018R03K0 18 32,5 3,0 450 740 x 229 x 177 10,6
EVF9321-EV 1 18 ERBM470R050W 470 1,0 0,1 15 240 x 60 x 60 0,6
EVF9322-EV 1 18 ERBM470R100W 470 1,0 0,1 15 240 x 60 x 70 0,6
EVF9323-EV 1 18 ERBM370R150W 370 1,5 0,3 22,4 240 x 95 x 80 1
EVF9324-EV 1 18 ERBD180R300W 180 3,0 0,3 45 440 x 115 x 89 2
EVF9325-EV 1 18 ERBD100R600W 100 5,5 0,6 90 640 x 115 x 89 3,1
EVF9326-EV 1 18 ERBD047R01K2 47 12,0 1,2 180 640 x 115 x 177 4,9
EVF9327-EV 1 18 ERBD033R02K0 33 17,0 2,0 300 640 x 115 x 265 7,1
EVF9328-EV 1 18 ERBD022R03K0 22 26,0 3,0 450 740 x 229 x 177 10,6
EVF9329-EV 1 18 ERBD018R03K0 18 32,5 3,0 450 740 x 229 x 177 10,6
EVF9330-EV 2 18 ERBD022R03K0 22 26,0 3,0 450 740 x 229 x 177 10,6
EVF9331-EV 2 18 ERBD018R03K0 18 26,0 3,0 450 740 x 229 x 177 10,6
EVF9332-EV 3 18 ERBD022R03K0 22 26,0 3,0 450 740 x 229 x 177 10,6
EVF9333-EV 3 18 ERBD018R03K0 18 32,5 3,0 450 740 x 229 x 177 10,6
EVS9321-ES 1 18 ERBD180R300W 180 3,0 0,3 45 440 x 115 x 89 2
EVS9322-ES 1 189 ERBD180R300W 180 3,0 0,3 45 440 x 115 x 89 2
EVS9323-ES 1 18 ERBD082R600W 82 6,0 0,6 90 640 x 115 x 89 3,1
EVS9324-ES 1 18 ERBD068R800W 68 8,0 0,8 120 540 x 115 x 177 4,3
EVS9325-ES 1 18 ERBD047R01K2 47 12,0 1,2 180 640 x 115 x 177 4,9
EVS9326-ES 1 18 ERBD047R01K2 47 12,0 1,2 180 640 x 115 x 177 4,9
EVS9327-ES 1 18 ERBD033R02K0 33 17,0 2,0 300 640 x 115 x 265 7,1
EVS9328-ES 1 18 ERBD022R03K0 22 26,0 3,0 450 740 x 229 x 177 10,6
EVS9329-ES 1 18 ERBD018R03K0 18 32,5 3,0 450 740 x 229 x 177 10,6
EVS9330-ES 2 18 ERBD022R03K0 22 26,0 3,0 450 740 x 229 x 177 10,6
EVS9331-ES 2 18 ERBD018R03K0 18 26,0 3,0 450 740 x 229 x 177 10,6
EVS9332-ES 3 18 ERBD022R03K0 22 26,0 3,0 450 740 x 229 x 177 10,6

DrivesAccessori
1
1-93Drives, motori, automazione 10/2006
Resistenze di Frenatura
Scelta delle resistenze di frenaturaLe resistenze di frenatura consigliate nelle tabelle sono sele-zionate per rispondere ad esigenze generiche in moltepliciapplicazioni. Per un corretto dimensionamento occorre stabili-re il tipo di carico applicato e conseguentemente utilizzare leprocedure indicate in tabella.
Carico attivo: carico in grado di avviarsi senza essereinfluenzato dall’azionamento. Es. svolgitori,ecc...
Carico passivo: carico in grado di arrestarsi senza essereinfluenzato dall’azionamento. Es. movimen-ti orizzontali, centrifughe, ventilatori, ecc...
Applicazioni con carico attivo Applicazioni con carico passivo
Potenza di frenatura continuativa PNf [kW]≥ Pmax · ηe · ηm ·
tf≥
Pmax · ηe · ηm·
tf
tcicl 2 tcicl
Energia dissipata Wmax [kWs]≥ Pmax · ηe · ηm · tf ≥
Pmax · ηe · ηm· tf
2
Rmin ≤ R ≤ VDC2
Pmax · ηe · ηm
tf = tempo di frenataVDC = Tensione del Bus DCPmax = potenza massima di frenataηe = rendimento elettrico (inverter + motore), valori
guida: 0,54 (0,25 kW) ... 0,85 (11 kW)
ηm = rendimento meccanico (riduttore + macchina).tf = tempo di frenataTciclo = tempo del ciclo = tempo che intercorre tra due
successive frenate
Dimensionamento
Resistenza tipo ERBD Resistenza IP65 tipo ERBSResistenza tipo ERBM

DrivesAccessori
1
1-94 Drives, motori, automazione 10/2006
Caratteristiche delle resistenze IP50/IP65
Caratteristiche delle resistenze IP20
Tipo Resistenza Potenza di frenatura Energia Dimensioni Sezione cavi PesoR di picco continuat. dissipata l x h x p m
[Ω] [kW] [kW] [kWs] [mm] [mm2] [AWG] [kW]
ERBM082R100W 1) 82 0,1 3 217 x 68 x 31 0,7
ERBM470R110W 2) 470 1,3 0,11 16,5 160 x 75 x 80 1,5 3) 16 3)
ERBM039R120W 1) 39 0,12 6 267 x 68 x 31 0,9
ERBM020R200W 1) 20 0,15 13 337 x 68 x 31 0,1
ERBM240R220W 2) 240 2,5 0,22 33 340 x 75 x 80 1,5 3) 16 3)
ERBS180R350W 180 3,5 0,35 52,5 381 x 104 x 123 1,5 3) 18 3) 2,1
ERBS100R625W 100 6,25 0,625 93,75 566 x 104 x 123 1,5 3) 18 3) 3,2
ERBS082R780W 82 7,8 0,78 117 666 x 104 x 123 2,5 3) 14 3) 3,7
ERBS039R01K2 39 16,4 1,2 248 747 x 106 x 200 8,4
ERBS022R03K2 22 32,0 3,2 485 810 x 121 x 276 13,2
1) Resistenze ERBM in versione IP50 per alimentatori ECSCS in versione cold plate, complete di cavo integrato da 2,5 m2) Resistenze ERBM in versione IP55 per inverter 8200 motec, complete di cavo integrato da 2,5 m3) Sezione cavi per inverter 8200 motec
1) Solo per inverter con alimentazione 230 V2) Consente frenature non superiori a 10 s
Tipo Resistenza Potenza di frenatura Energia Dimensioni Sezione cavi PesoR di picco continuat. dissipata l x h x p m
[Ω] [kW] [kW] [kWs] [mm] [mm2] [AWG] [kW]
ERBM470R020W 1) 470 – 0,02 3 2) 160 x 33 x 45 1 18 0,2
ERBM470R050W 1) 470 – 0,05 7,5 240 x 60 x 60 1 18 0,6
ERBM470R100W 470 1 0,1 15 240 x 60 x 70 1 18 0,6
ERBM200R100W 1) 200 1 0,1 15 160 x 95 x 80 1 18 0,6
ERBM370R150W 370 15 0,15 22,5 240 x 95 x 80 1 18 0,9
ERBM100R150W 1) 100 15 0,15 22,5 1 18 0,9
ERBM082R150W 1) 82 15 0,15 22,5 240 x 95 x 80 1 18 0,9
ERBM240R200W 240 2 0,2 30 340 x 70 x 80 1 18 1,2
ERBM082R200W 1) 82 2 0,2 30 340 x 70 x 80 1 18 1,2
ERBM052R200W 1) 52 2 0,2 30 340 x 70 x 80 1 18 1,2
ERBD180R300W 180 3 0,3 45 440 x 115 x 89 1 18 2,0
ERBD100R600W 100 5,5 0,6 90 640 x 115 x 89 1 18 3,1
ERBD082R600W 82 6 0,6 90 640 x 115 x 89 1,5 16 3,1
ERBD068R800W 68 8 0,8 120 540 x 115 x 177 1,5 16 4,3
ERBD047R01K2 47 12 1,2 180 640 x 115 x 177 2,5 14 4,9
ERBD033R02K0 33 17 2,0 300 640 x 115 x 265 6 10 7,1
ERBD022R03K0 22 26,5 3,0 450 740 x 229 x 177 6 10 10,6
ERBD018R03K0 18 32,5 3,0 450 740 x 229 x 177 6 10 10,6

DrivesAccessori
1
1-95Drives, motori, automazione 10/2006
Fusibili, interruttori automatici e cavi per inverter con filtro di rete
Funzionamento con sovraccarichi fino al 150% Funzionamento continuativo al 120% HVAC
Inverter 8200 vector/motec Rete Fusibile Interrut. aut. Sezione cavi Fusibile Interrut. aut. Sezione cavi
Tipo [V] VDE UL VDE [mm2] AWG VDE UL VDE [mm2] AWG
E82EV251K2C, E82MV251-2B M10 A 10 A C10 A 1,5 16 M10 A 10 A C10 A 1,5 16
E82EV371K2C, E82MV371-2B M10 A 10 A C10 A 1,5 16 – – – – –
E82EV551K2C 1~ M10 A 10 A B10 A 1,5 16 M10 A 10 A B10 A 1,5 16
E82EV751K2C 230 M10 A 10 A B10 A 1,5 16 M16 A 15 A B16 A 2,5 14
E82EV152K2C M16 A 15 A B16 A 2 x 1,5 2 x 16 M20 A 20 A B20 A 2 x 1,5 2 x 16
E82EV222K2C M20 A 20 A B20 A 2 x 1,5 2 x 16 – – – – –
E82EV551K2C M6 A 5 A B6 A 1 18 M6 A 5 A B6 A 1 18
E82EV751K2C M6 A 5 A B6 A 1 18 M10 A 10 A B10 A 1,5 16
E82EV152K2C M10 A 10 A B10 A 1,5 16 M10 A 10 A B10 A 1,5 16
E82EV222K2C 3~ M10 A 10 A B10 A 1,5 16 – – – – –
E82EV302K2C 230 M16 A 15 A B16 A 2,5 14 M20 A 20 A B20 A 4 12
E82EV402K2C M20 A 20 A B20 A 4 12 – – – – –
E82EV552K2C M25 A 25 A B25 A 4 10 M32 A 35 A B32 A 6 8
E82EV752K2C M35 A 35 A – 6 8 – – – – –
E82EV551K4C, E82MV551-4B M6 A 5 A B6 A 1 18 M6 A 5 A B6 A 1 18
E82EV751K4C, E82MV751-4B M6 A 5 A B6 A 1 18 M6 A 5 A B6 A 1 18
E82MV152-4B M6 A 5 A B6 A 1 18 M10 A 10 A B10 A 1,5 16
E82EV152K4C M10 A 10 A B10 A 1,5 16 – – – – –
E82EV222K4C, E82MV222-4B 3~ M10 A 10 A B10 A 1,5 16 M10 A 10 A B10 A 1,5 16
E82EV302K4C, E82MV302-4B 400 M10 A 10 A B10 A 1,5 16 M10 A 10 A B10 A 1,5 16
E82EV402K4C, E82MV402-4B M16 A 15 A B16 A 2,5 14 M16 A 15 A B16 A 2,5 14
E82EV552K4C, E82MV552-4B M20 A 20 A B20 A 4 12 – – – – –
E82EV752K4C, E82MV752-4B M20 A 20 A B20 A 4 12 – – – – –
E82EV113K4C M32 A 25 A B32 A 6 10 – – – – –
E82EV153K4B201 M35 A 35 A – 10 8 M50 A 50 A – 16 6
E82EV223K4B201 M50 A 50 A – 16 6 M63 A 63 A – 25 4
E82EV303K4B2013~
M80 A 80 A – 25 3 M80 A 80 A – 25 3
E82EV453K4B201 M100 A 100 A – 50 1 M125 A 125 A – 50 0
E82EV553K4B201400
M125 A 125 A – 50 0 M160 A 175 A – 70 2/0
E82EV753K4B201 M160 A 175 A – 70 2/0 M160 A 175 A – 70 2/0
E82EV903K4B201 M200 A 200 A – 95 3/0 M200 A 200 A – 95 3/0

DrivesAccessori
1
1-96 Drives, motori, automazione 10/2006
Funzionamento gravoso 9300-EV-ES Funzionamento a potenza incrementata 9300-EV
Inverter 9300 EV/ES Rete Fusibile Interrut. aut. Sezione cavi Fusibile Interrut. aut. Sezione cavi
Tipo [V] VDE UL VDE [mm2] AWG VDE UL VDE [mm2] AWG
EV-9321-EV-ES M6 A 5 A B6 A 1 17 M6 A 5 A B6 A 1 17
EV-9322-EV-ES M6 A 5 A B6 A 1 17 M6 A 5 A B6 A 1 17
EV-9323-EV-ES3~
M10 A 10 A B10 A 1,5 15 M10 A 10 A B10 A 1,5 15
EV-9324-EV-ES400
M10 A 10 A B10 A 1,5 15 M10 A 10 A B10 A 1,5 15
EV-9325-EV-ES M20 A 20 A B20 A 4 11 M20 A 10 A B20 A 4 11
EV-9326-EV-ES M32 A 25 A B32 A 6 10 M32 A 25 A B32 A 6 10
EV-9327-EV-ES M35A 35A – 10 7 M50 A 50 A – 16 5
EV-9328-EV-ES M50 A 50 A – 16 5 M63A 63A – 25 3
EV-9329-EV-ES M80 A 80 A – 25 3 M80 A 80 A – 25 3
EV-9330-EV-ES M100 A 100 A – 50 2 M125 A 125 A – 70 2/0
EV-9331-EV-ES M125 A 125 A – 70 2/0 M160 A 175 A – 95 3/0
EV-9332-EV-ES 3~ M160 A 175 A – 95 3/0 M160 A 175 A – 95 3/0
EV-9333-EV 400 M200 A 200 A – 120 4/0 M200 A 200 A – 120 4/0
EV-9335-EV M250 A – – 150 –
EV-9336-EV M315 A – – 150 –
EV-9337-EV M315 A – – 150 –
EV-9338-EV M400 A – – 240 –
Inverter 9300 EV Rete Fusibile Sezione caviMaster Slave Master Slave
Tipo [V] VDE [mm2]
EV-9381-EV3~
M315 A M315 A 150 95
EV-9382-EV400
M315 A M315 A 150 95
EV-9383-EV M400 A M400 A 240 95
Fusibili, interruttori automatici e cavi per inverter con filtro di rete

Motori
2-1Drives, motori, automazione 9/2006
2
I motori Lenze costituiscono una gamma ricca e diversificata,perfettamente integrata nel programma drive e riduttori.
Caratterizzati da un’apprezzata compattezza, i motori Lenzesono stati studiati per rispondere ad un’ampia varietà diapplicazioni fino a oltre 300 kW, nelle più disparatecondizioni ambientali.
L’ampia gamma d’accessori, parte integrante del programmamotori Lenze, aumenta la versatilità e permette di ritagliarel’azionamento su misura per l’applicazione. Oltre a poterutilizzare la motorizzazione ideale, in funzione delle realinecessità dinamiche del carico da pilotare, è possibilescegliere il trasduttore più idoneo in funzionedell’applicazione e del drive impiegato, oppure il tipo diventilazione. Le versioni con freno di sicurezza integrato (amolle o a magnete permanente a seconda del motore) è ingrado di provvedere all’arresto del carico in situazionid’emergenza.
Tutti i motori Lenze sono realizzati secondo elevati standardqualitativi per assicurare la massima affidabilità e durata inogni condizione d’esercizio. L’impiego di cuscinetti ad alte prestazioni, avvolgimenti conisolamento in classe H e la presenza di un sensore ditemperatura degli avvolgimenti sono parte integrante ditutte le motorizzazioni Lenze.
Le versioni motoriduttore costituiscono delle unità ad alteprestazioni, silenziose e molto compatte che si distinguonoper il loro rendimento elevato ed il gioco angolare moltocontenuto. La combinazione tra sei differenti tipologie dimotori standard, dodici modelli di riduttori e numeroseopzioni in uscita, dà vita ad un assortimento davvero unico.
Programma motori
Vasta gamma
Robusti e potenti

Motori
2-2 Drives, motori, automazione 9/2006
2
Motori Servomotori asincroni Servomotori sincronitrifase con carcassa liscia SDSGS
MDXMA/MDERA SDSGA710
Motori trifase asincroni Motori asincroni Servomotori sincroni,con opzioni con carcassa liscia, con servodrive 931M per inverter con opzioni per inverter integrato a richiesta
Protezione IP54/IP55 IP54/IP55 IP54/IP55
Prestazione dinamica Media Media Elevata
Momento d’inerzia Medio Elevato Contenuto
Capacità di sovraccarico Media Elevata Molto elevata
Densità di potenza Media Media Elevata
Campo di deflussaggio Medio Esteso Minimo
Coppia residua (riferita a M0) Nessuna Nessuna
Ripple di coppia rispetto a Mn 3,5 % … 4,5 %(valori approssimativi)
Taglie disponibili 17 4 4
Potenza 30 W … 315 kW 12 W … 600 W 140 W … 750 W
Velocità 1.400, 2.500, 2.800 giri/min 1.350, 2.700 giri/min 2.000 ... 3.000 giri/min
Coppia continuativa 0,2 … 290 Nm 0,09 … 1,9 Nm 0,45 … 2,2 Nm
Flangia Ø 65, 75, 85, 95 mm Ø 65, 75, 85, 95 mm
Altezza asse (mm) 50, 56, 63, 71, 80, 90, 100, 112, 132,160, 180, 200, 225, 250, 280, 315, 355 33, 38, 43, 47 mm 33, 38, 43, 47 mm
Ventilatore/Freno Con servoventilatore assiale, Senza ventilatore, Senza ventilatore,(solo MDXMA) Freno a molle Freno a molle,o autoventilato Freno a magnete permanente
Trasduttori Serie MDXMA: Serie SDSGA: ResolverResolver, Resolver, Encoder assoluto SinCos
Encoder incrementale, Encoder incrementaleEncoder SinCos
Tipo di accoppiamento Diretto o standard coi riduttori Diretto o standard coi riduttori Diretto o standard coi riduttorimotore-riduttore GST, GFL, GKS, GSS, GKR. GST, GKR. GST, GKR.
Standard con SPL, Standard con SPL, Standard con SPL,Integrato con SSN Integrato con SSN Integrato con SSN
(in funzione della taglia) (in funzione della taglia)
Combinazione motore-drive starttec, motec, smd, tmd, starttec, motec, smd, tmd, 931M, 931E, 9300, 9400 8200, ECS, 9300, 9400 8200, ECS, 9300, 9400
Programma motori

Motori
2-3Drives, motori, automazione 9/2006
2
Servomotori sincroni Servomotori asincroni Servomotori asincroni Servomotori comando pinzaMCS MCA MDFQA MDSLS
Servomotori ad alta dinamica Servomotori nervati, Servomotori ad elevata Servomotori sincroni ed elevata densità di potenza completamente chiusi, densità di potenza, con vite a ricircolo
con o senza ventilatore con ventilazione forzata di sfere integrata
IP54/IP65 IP54/IP65 IP23 IP54
Molto elevata Elevata Molto elevata Molto elevata
Molto contenuto Contenuto Molto contenuto Molto contenuto
Molto elevata Molto elevata Molto elevata Molto elevata
Molto elevata Elevata Molto elevata Elevata
Minimo Esteso Esteso Minimo
<1 % Nessuna Nessuna <2 %
2,5 % 3,5 % … 4,5 % 3,5 % … 4,5 % 3,5 % … 4,5 %
5 6 4 2
250 W … 10 kW 1 kW … 20 kW 10 kW … 95 kW Corsa 160 / 170 mm
1.300 ... 6.000 giri/min 1.600 ... 4.100 giri/min 500 ... 3.000 giri/min 250 mm/s
0,6 … 65 Nm 2 … 75 Nm 75 … 480 Nm Forza 1,9 … 15 kN
ò 6, 9, 12, 14, 19 cm ò 10, 13, 14, 17, 19, 21 cm ò 20, 22, 26, 32 cm ò 10, 13 cm
31, 45, 58, 71, 96 mm 56, 71, 80, 90, 100, 112 mm 100, 112, 132, 160 mm 56, 71 mm
Senza ventilatore, Senza ventilatore, Servoventilatore radiale, Senza ventilatore,Freno a magnete permanente con servoventilatore, Freno a molle Freno a molle
Freno a magnete permanente
Resolver, Resolver, Resolver, ResolverEncoder SinCos, Encoder incrementale, Encoder incrementale,
Encoder SinCos, Encoder SinCos,Encoder assoluto SinCos Encoder assoluto SinCos
Diretto o standard coi riduttori Diretto o standard coi riduttori Standard coi riduttori Non possibileGST, GFL, GKS, GSS, GKR. GST, GFL, GKS, GSS, GKR. GST, GFL, GKS, GSS
Standard con GPA Standard con GPA
ECS, 9300, 9400, 94/940 ECS, 9300, 9400 ECS, 9300, 9400 ECS, 9300, 9400

Motori ACMDxMA
2-4 Drives, motori, automazione 9/2006
2
La serie MDxMA Lenze è composta da motori asincroni AC agabbia di scoiattolo di grande robustezza ottimizzati per ilfunzionamento con inverter. Accettano frequenti variazionidella tensione e le sovratensioni dovute agli inverter.I motori MDxMA, collegati a triangolo (D), sono in grado dilavorare a coppia costante fino a 87 Hz e a potenza costantefino alla loro massima velocità di 4.500 giri/min.
L’abbinamento a servoinverter Lenze consente di risolvere leproblematiche di motorizzazione di macchine che nonnecessitano la dinamica e la precisione di un servomotore edallo stesso tempo offrire una capacità di controllo non dispo-nibile con un inverter standard.
Applicazioni tipiche: taglierine, estrusori, pompe, cordatrici,nastratrici, ventilatori, stampe, convogliatori che richiedonoun buon controllo della velocità e della coppia.
Questi motori sono prodotti e collaudati per rispondere aseveri standard qualitativi, si distinguono per la totalemodularità e possono essere forniti anche in esecuzionemotoriduttore. Contattate il nostro Ufficio Tecnico.
Caratteristiche˘ Studiati per frequenze di chopper fino a 16 kHz.˘ Morsettiera in grado di consentire un collegamento
razionale e ordinato di tutti gli accessori.˘ Vasto campo di variazione della velocità.˘ Ventilatore di raffreddamento opzionale.˘ Possibilità di scelta tra differenti dispositivi di retroazione:
- resolver TS 2650 (solo con serie 9300)- encoder incrementale ITD21 5V TTL- encoder sin-cos ITD22 A4
˘ freno di sicurezza. ˘ Protezione IP 54 (IP 55 opzionale).˘ Termocontatto tarato per temperature classe F (155 °C).˘ Esecuzioni B3, B5 e B14.˘ Le curve coppia/velocità relative al funzionamento in
abbinamento ai servoinverter serie 9300 sono scaricabililiberamente dal nostro sito, www.lenzegerit.it
Massima flessibilità
ed affidabilità
Serie MDxMA motori AC0,25...38,7 kW
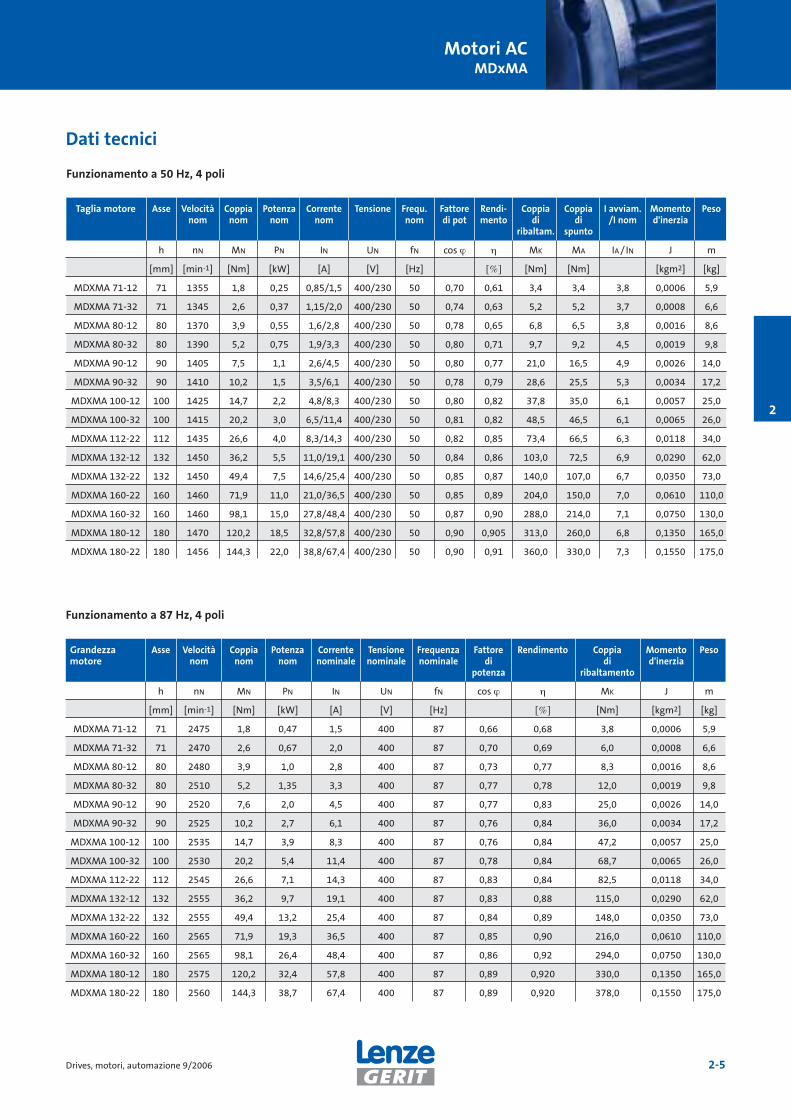
Motori ACMDxMA
2-5Drives, motori, automazione 9/2006
2
Funzionamento a 50 Hz, 4 poli
Funzionamento a 87 Hz, 4 poli
Taglia motore Asse Velocità Coppia Potenza Corrente Tensione Frequ. Fattore Rendi- Coppia Coppia I avviam. Momento Pesonom nom nom nom nom di pot mento di di /I nom d'inerzia
ribaltam. spunto
h nN MN PN IN UN fN cos ϕ η MK MA IA / IN J m
[mm] [min-1] [Nm] [kW] [A] [V] [Hz] [%] [Nm] [Nm] [kgm2] [kg]
MDXMA 71-12 71 1355 1,8 0,25 0,85/1,5 400/230 50 0,70 0,61 3,4 3,4 3,8 0,0006 5,9
MDXMA 71-32 71 1345 2,6 0,37 1,15/2,0 400/230 50 0,74 0,63 5,2 5,2 3,7 0,0008 6,6
MDXMA 80-12 80 1370 3,9 0,55 1,6/2,8 400/230 50 0,78 0,65 6,8 6,5 3,8 0,0016 8,6
MDXMA 80-32 80 1390 5,2 0,75 1,9/3,3 400/230 50 0,80 0,71 9,7 9,2 4,5 0,0019 9,8
MDXMA 90-12 90 1405 7,5 1,1 2,6/4,5 400/230 50 0,80 0,77 21,0 16,5 4,9 0,0026 14,0
MDXMA 90-32 90 1410 10,2 1,5 3,5/6,1 400/230 50 0,78 0,79 28,6 25,5 5,3 0,0034 17,2
MDXMA 100-12 100 1425 14,7 2,2 4,8/8,3 400/230 50 0,80 0,82 37,8 35,0 6,1 0,0057 25,0
MDXMA 100-32 100 1415 20,2 3,0 6,5/11,4 400/230 50 0,81 0,82 48,5 46,5 6,1 0,0065 26,0
MDXMA 112-22 112 1435 26,6 4,0 8,3/14,3 400/230 50 0,82 0,85 73,4 66,5 6,3 0,0118 34,0
MDXMA 132-12 132 1450 36,2 5,5 11,0/19,1 400/230 50 0,84 0,86 103,0 72,5 6,9 0,0290 62,0
MDXMA 132-22 132 1450 49,4 7,5 14,6/25,4 400/230 50 0,85 0,87 140,0 107,0 6,7 0,0350 73,0
MDXMA 160-22 160 1460 71,9 11,0 21,0/36,5 400/230 50 0,85 0,89 204,0 150,0 7,0 0,0610 110,0
MDXMA 160-32 160 1460 98,1 15,0 27,8/48,4 400/230 50 0,87 0,90 288,0 214,0 7,1 0,0750 130,0
MDXMA 180-12 180 1470 120,2 18,5 32,8/57,8 400/230 50 0,90 0,905 313,0 260,0 6,8 0,1350 165,0
MDXMA 180-22 180 1456 144,3 22,0 38,8/67,4 400/230 50 0,90 0,91 360,0 330,0 7,3 0,1550 175,0
Grandezza Asse Velocità Coppia Potenza Corrente Tensione Frequenza Fattore Rendimento Coppia Momento Pesomotore nom nom nom nominale nominale nominale di di d'inerzia
potenza ribaltamento
h nN MN PN IN UN fN cos ϕ η MK J m
[mm] [min-1] [Nm] [kW] [A] [V] [Hz] [%] [Nm] [kgm2] [kg]
MDXMA 71-12 71 2475 1,8 0,47 1,5 400 87 0,66 0,68 3,8 0,0006 5,9
MDXMA 71-32 71 2470 2,6 0,67 2,0 400 87 0,70 0,69 6,0 0,0008 6,6
MDXMA 80-12 80 2480 3,9 1,0 2,8 400 87 0,73 0,77 8,3 0,0016 8,6
MDXMA 80-32 80 2510 5,2 1,35 3,3 400 87 0,77 0,78 12,0 0,0019 9,8
MDXMA 90-12 90 2520 7,6 2,0 4,5 400 87 0,77 0,83 25,0 0,0026 14,0
MDXMA 90-32 90 2525 10,2 2,7 6,1 400 87 0,76 0,84 36,0 0,0034 17,2
MDXMA 100-12 100 2535 14,7 3,9 8,3 400 87 0,76 0,84 47,2 0,0057 25,0
MDXMA 100-32 100 2530 20,2 5,4 11,4 400 87 0,78 0,84 68,7 0,0065 26,0
MDXMA 112-22 112 2545 26,6 7,1 14,3 400 87 0,83 0,84 82,5 0,0118 34,0
MDXMA 132-12 132 2555 36,2 9,7 19,1 400 87 0,83 0,88 115,0 0,0290 62,0
MDXMA 132-22 132 2555 49,4 13,2 25,4 400 87 0,84 0,89 148,0 0,0350 73,0
MDXMA 160-22 160 2565 71,9 19,3 36,5 400 87 0,85 0,90 216,0 0,0610 110,0
MDXMA 160-32 160 2565 98,1 26,4 48,4 400 87 0,86 0,92 294,0 0,0750 130,0
MDXMA 180-12 180 2575 120,2 32,4 57,8 400 87 0,89 0,920 330,0 0,1350 165,0
MDXMA 180-22 180 2560 144,3 38,7 67,4 400 87 0,89 0,920 378,0 0,1550 175,0
Dati tecnici
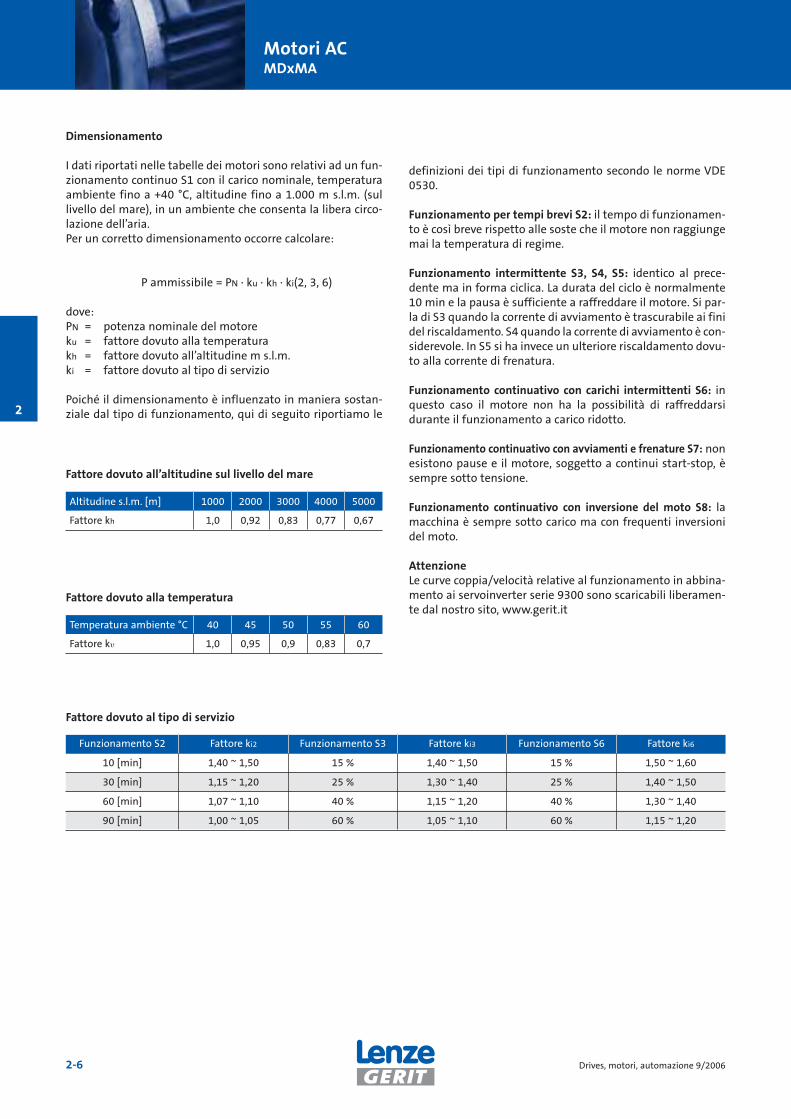
Motori ACMDxMA
2-6 Drives, motori, automazione 9/2006
2
Dimensionamento
I dati riportati nelle tabelle dei motori sono relativi ad un fun-zionamento continuo S1 con il carico nominale, temperaturaambiente fino a +40 °C, altitudine fino a 1.000 m s.l.m. (sullivello del mare), in un ambiente che consenta la libera circo-lazione dell’aria.Per un corretto dimensionamento occorre calcolare:
P ammissibile = PN · ku · kh · ki(2, 3, 6)
dove:PN = potenza nominale del motore ku = fattore dovuto alla temperatura kh = fattore dovuto all’altitudine m s.l.m. ki = fattore dovuto al tipo di servizio
Poiché il dimensionamento è influenzato in maniera sostan-ziale dal tipo di funzionamento, qui di seguito riportiamo le
definizioni dei tipi di funzionamento secondo le norme VDE0530.
Funzionamento per tempi brevi S2: il tempo di funzionamen-to è così breve rispetto alle soste che il motore non raggiungemai la temperatura di regime.
Funzionamento intermittente S3, S4, S5: identico al prece-dente ma in forma ciclica. La durata del ciclo è normalmente10 min e la pausa è sufficiente a raffreddare il motore. Si par-la di S3 quando la corrente di avviamento è trascurabile ai finidel riscaldamento. S4 quando la corrente di avviamento è con-siderevole. In S5 si ha invece un ulteriore riscaldamento dovu-to alla corrente di frenatura.
Funzionamento continuativo con carichi intermittenti S6: inquesto caso il motore non ha la possibilità di raffreddarsidurante il funzionamento a carico ridotto.
Funzionamento continuativo con avviamenti e frenature S7: nonesistono pause e il motore, soggetto a continui start-stop, èsempre sotto tensione.
Funzionamento continuativo con inversione del moto S8: lamacchina è sempre sotto carico ma con frequenti inversionidel moto.
AttenzioneLe curve coppia/velocità relative al funzionamento in abbina-mento ai servoinverter serie 9300 sono scaricabili liberamen-te dal nostro sito, www.gerit.it
Funzionamento S2 Fattore ki2 Funzionamento S3 Fattore ki3 Funzionamento S6 Fattore ki6
10 [min] 1,40 ~ 1,50 15 % 1,40 ~ 1,50 15 % 1,50 ~ 1,60
30 [min] 1,15 ~ 1,20 25 % 1,30 ~ 1,40 25 % 1,40 ~ 1,50
60 [min] 1,07 ~ 1,10 40 % 1,15 ~ 1,20 40 % 1,30 ~ 1,40
90 [min] 1,00 ~ 1,05 60 % 1,05 ~ 1,10 60 % 1,15 ~ 1,20
Temperatura ambiente °C 40 45 50 55 60
Fattore kυ 1,0 0,95 0,9 0,83 0,7
Altitudine s.l.m. [m] 1000 2000 3000 4000 5000
Fattore kh 1,0 0,92 0,83 0,77 0,67
Fattore dovuto alla temperatura
Fattore dovuto all’altitudine sul livello del mare
Fattore dovuto al tipo di servizio

Motori ACMDxMA
2-7Drives, motori, automazione 9/2006
2
Dimensioni [mm]
Dimensioni Versione B3, 071...100*
Versione autoventilata Versione con servoventilatore
Motore tipo Senza Con resolver Con Senza Con resolver Con Con freno etrasduttore o encoder freno trasduttore o encoder Freno resolver o ecoder
MDXMAXX 071-12 k6 222 272 272 293 293 340 340
k2 63 121 121 134 134 188 188
MDXMAXX 071-32 k6 241 291 291 312 312 359 359
k2 63 121 121 134 134 188 188
MDXMAXX 080-12 k6 261 315 315 346 346 397 397
k2 70 130 130 155 155 211 211
MDXMAXX 080-32 k6 281 335 335 366 366 417 417
k2 70 130 130 155 155 211 211
MDXMAXX 090-12 k6 313 377 385 418 418 475 475
k2 75 139 153 180 180 243 243
MDXMAXX 090-32 k6 338 402 410 443 443 500 500
k2 75 139 153 180 180 243 243
MDXMAXX 100-X2 k6 392 454 454 494 494 550 550
k2 80 158 158 182 182 254 254
* Le quote z1, z2 e p2 si riferiscono alla versione con inverter 8200 Motec. Per maggiori informazioni consultate il ns. Ufficio Tecnico.
Motore tipo d x l a b c d4 e f g h i p p1 p2 q q1 q2 s s1 t
Sigle secondo IEC 72
D x E B A HA BB AB AC H K GA
MDXMAXX 071-12 14 x 30 90 112 8 M5 105 142 143 71 75 214 - 281 52 - 43 7 10 16
MDXMAXX 071-32 14 x 30 90 112 8 M5 105 142 143 71 75 214 - 281 52 - 43 7 10 16
MDXMAXX 080-12 19 x 40 100 125 9 M6 120 160 156 80 90 231 - 315 65 - 59 10 13 21,5
MDXMAXX 080-32 19 x 40 100 125 9 M6 120 160 156 80 90 231 - 315 65 - 59 10 13 21,5
MDXMAXX 090-12 24 x 50 100 140 10 M8 153 170 176 90 106 232 150 315 85 47,5 72 10 12 27
MDXMAXX 090-32 24 x 50 125 140 10 M8 153 170 176 90 106 232 150 315 85 47,5 72 10 12 27
MDXMAXX 100-X2 28 x 60 140 160 14 M10 172 200 194 100 123 251 159 335 99 47,5 86 12 14 31

Motori ACMDxMA
2-8 Drives, motori, automazione 9/2006
2
Dimensioni [mm]
Versione B3, 112...180
Versione autoventilata Versione con servoventilatore
Motore tipo Senza Con resolver Con Senza Con resolver Con Con freno etrasduttore o encoder freno trasduttore o encoder Freno resolver o ecoder
MDXMAXX 112-22 k6 420 475 492 514 514 587 587
k2 88 143 160 182 182 255 255
MDXMAXX 132-12 k6 470 572 550 572 572 650 650
k2 120 222 210 232 232 310 310
MDXMAXX 132-22 k6 508 610 588 610 610 688 688
k2 120 222 210 232 232 310 310
MDXMAXX 160-22 k6 598 703 711 711 711 823 823
k2 147 252 260 260 260 372 372
MDXMAXX 160-32 k6 642 747 755 755 755 867 867
k2 147 252 260 260 260 372 372
MDXMAXX 180-12 k6 671 780 784 787 787 899 899
k2 147 256 260 263 263 375 375
MDXMAXX 180-22 k6 671 780 784 787 787 899 899
k2 147 256 260 263 263 375 375
x2 y
127 85
127 85
127 85
127 85
127 85
127 85
127 85
Motore tipo d x l a b c d4 e f g h i p p1 q q1 s s1 t u x1
Sigle secondo IEC 72
D x E B A HA BB AB AC H K GA F
MDXMAXX 112-22 28 x 60 140 190 16 M10 174 230 219 112 130 286 172 102 47,5 12 12 31 8 226
MDXMAXX 132-12 38 x 80 140 216 16 M12 182 278 258 132 169 320 191 129 47,5 12 12 41 10 226
MDXMAXX 132-22 38 x 80 178 216 16 M12 220 278 258 132 169 320 191 129 47,5 12 12 41 10 226
MDXMAXX 160-22 42 x 110 210 254 20 M16 256 300 310 160 218 380 217 175 47,5 15 15 45 12 226
MDXMAXX 160-32 42 x 110 254 254 20 M16 300 300 310 160 218 380 217 175 47,5 15 15 45 12 226
MDXMAXX 180-12 48 x 110 241 279 23 M16 320 350 348 180 231 405 217 186 47,5 15 15 51,5 14 226
MDXMAXX 180-22 48 x 110 279 279 23 M16 320 350 348 180 231 405 217 186 47,5 15 15 51,5 14 226

Motori ACMDxMA
2-9Drives, motori, automazione 9/2006
2
Versione autoventilata Versione con servoventilatore
Motore tipo Senza Con resolver Con Senza Con resolver Con Con freno etrasduttore o encoder freno trasduttore o encoder Freno resolver o ecoder
MDXMAXX 071-12 k6 222 272 272 293 293 340 340
k2 63 121 121 134 134 188 188
MDXMAXX 071-32 k6 241 291 291 312 312 359 359
k2 63 121 121 134 134 188 188
MDXMAXX 080-12 k6 261 315 315 346 346 397 397
k2 70 130 130 155 155 211 211
MDXMAXX 080-32 k6 281 335 335 366 366 417 417
k2 70 130 130 155 155 211 211
MDXMAXX 090-12 k6 313 377 385 418 418 475 475
k2 75 139 153 180 180 243 243
MDXMAXX 090-32 k6 338 402 410 443 443 500 500
k2 75 139 153 180 180 243 243
MDXMAXX 100-X2 k6 392 454 454 494 494 550 550
k2 80 158 158 182 182 254 254
Dimensioni [mm]
Versione B5, 071...100*
* Le quote z1, z2 e p2 si riferiscono alla versione con inverter 8200 Motec. Per maggiori informazioni consultate il ns. Ufficio Tecnico.
x2 y z1 z2
120 - 202 156
120 - 202 156
120 - 230 176
120 - 230 176
120 85 230 176
120 85 230 176
120 85 230 176
Motore tipo Flangia d x l a1 b1 c1 d4 e1 f1 g p p1 p2 q q1 q2 s2 t u x1
DIN 42948 Sigle secondo IEC 72
D x E P N LA M T AC S GA F
MDXMAXX 071-12 A160 14 x 30 160 110 10 M5 130 3,5 143 143 - 210 52 - 43 10 16 5 200
MDXMAXX 071-32 A160 14 x 30 160 110 10 M5 130 3,5 143 143 - 210 52 - 43 10 16 5 200
MDXMAXX 080-12 A200 19 x 40 200 130 10 M6 165 3,5 156 151 - 234 65 - 59 12 21,5 6 200
MDXMAXX 080-32 A200 19 x 40 200 130 10 M6 165 3,5 156 151 - 234 65 - 59 12 21,5 6 200
MDXMAXX 090-12 A200 24 x 50 200 130 10 M8 165 3,5 176 142 150 225 85 47,5 72 12 27 8 200
MDXMAXX 090-32 A200 24 x 50 200 130 10 M8 165 3,5 176 142 150 235 85 47,5 72 12 27 8 200
MDXMAXX 100-X2 A250 28 x 60 250 180 11 M10 215 4 194 151 159 235 99 47,5 86 15 31 8 200

Motori ACMDxMA
2-10 Drives, motori, automazione 9/2006
2
Dimensioni [mm]
Versione B5, 112...180
Versione autoventilata Versione con servoventilatore
Motore tipo Senza Con resolver Con Senza Con resolver Con Con freno etrasduttore o encoder freno trasduttore o encoder Freno resolver o ecoder
MDXMAXX 112-22 k6 420 475 492 514 514 587 587
k2 88 143 160 182 182 255 255
MDXMAXX 132-12 k6 470 572 550 572 572 650 650
k2 120 222 210 232 232 310 310
MDXMAXX 132-22 k6 508 610 588 610 610 688 688
k2 120 222 210 232 232 310 310
MDXMAXX 160-22 k6 598 703 711 711 711 823 823
k2 147 252 260 260 260 372 372
MDXMAXX 160-32 k6 642 747 755 755 755 867 867
k2 147 252 260 260 260 372 372
MDXMAXX 180-12 k6 671 780 784 787 787 899 899
k2 147 256 260 263 263 375 375
MDXMAXX 180-22 k6 671 780 784 787 787 899 899
k2 147 256 260 263 263 375 375
Motore tipo Flangia d x l a1 b1 c1 d4 e1 f1 g p p1 q q1 s2 t u x1 x2 y
DIN 42948 Sigle secondo IEC 72
D x E P N LA M T AC S GA F
MDXMAXX 112-22 A250 28 x 60 250 180 12 M10 215 4 219 174 172 102 47,5 15 31 8 226 127 85
MDXMAXX 132-12 A300 38 x 80 300 230 12 M12 265 4 258 188 191 129 47,5 15 41 10 226 127 85
MDXMAXX 132-22 A300 38 x 80 300 230 12 M12 265 4 258 188 191 129 47,5 15 41 10 226 127 85
MDXMAXX 160-22 A350 42 x 110 350 250 13 M16 300 5 310 220 217 175 47,5 19 45 12 226 127 85
MDXMAXX 160-32 A350 42 x 110 350 250 13 M16 300 5 310 220 217 175 47,5 19 45 12 226 127 85
MDXMAXX 180-12 A350 48 x 110 350 250 13 M16 300 5 348 238 217 186 47,5 19 51,5 14 226 127 85
MDXMAXX 180-22 A350 48 x 110 350 250 13 M16 300 5 348 238 217 186 47,5 19 51,5 14 226 127 85
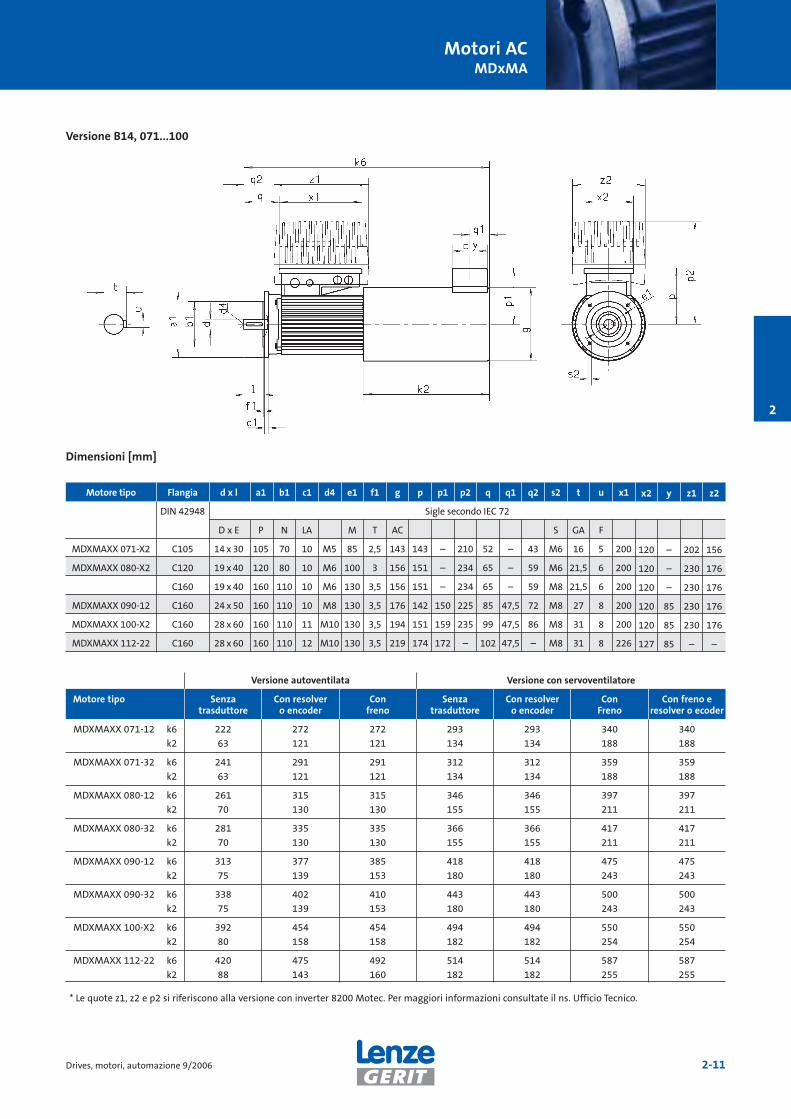
Motori ACMDxMA
2-11Drives, motori, automazione 9/2006
2
Versione autoventilata Versione con servoventilatore
Motore tipo Senza Con resolver Con Senza Con resolver Con Con freno etrasduttore o encoder freno trasduttore o encoder Freno resolver o ecoder
MDXMAXX 071-12 k6 222 272 272 293 293 340 340
k2 63 121 121 134 134 188 188
MDXMAXX 071-32 k6 241 291 291 312 312 359 359
k2 63 121 121 134 134 188 188
MDXMAXX 080-12 k6 261 315 315 346 346 397 397
k2 70 130 130 155 155 211 211
MDXMAXX 080-32 k6 281 335 335 366 366 417 417
k2 70 130 130 155 155 211 211
MDXMAXX 090-12 k6 313 377 385 418 418 475 475
k2 75 139 153 180 180 243 243
MDXMAXX 090-32 k6 338 402 410 443 443 500 500
k2 75 139 153 180 180 243 243
MDXMAXX 100-X2 k6 392 454 454 494 494 550 550
k2 80 158 158 182 182 254 254
MDXMAXX 112-22 k6 420 475 492 514 514 587 587
k2 88 143 160 182 182 255 255
Dimensioni [mm]
Versione B14, 071...100
x2 y z1 z2
120 – 202 156
120 – 230 176
120 – 230 176
120 85 230 176
120 85 230 176
127 85 – –
Motore tipo Flangia d x l a1 b1 c1 d4 e1 f1 g p p1 p2 q q1 q2 s2 t u x1
DIN 42948 Sigle secondo IEC 72
D x E P N LA M T AC S GA F
MDXMAXX 071-X2 C105 14 x 30 105 70 10 M5 85 2,5 143 143 – 210 52 – 43 M6 16 5 200
MDXMAXX 080-X2 C120 19 x 40 120 80 10 M6 100 3 156 151 – 234 65 – 59 M6 21,5 6 200
C160 19 x 40 160 110 10 M6 130 3,5 156 151 – 234 65 – 59 M8 21,5 6 200
MDXMAXX 090-12 C160 24 x 50 160 110 10 M8 130 3,5 176 142 150 225 85 47,5 72 M8 27 8 200
MDXMAXX 100-X2 C160 28 x 60 160 110 11 M10 130 3,5 194 151 159 235 99 47,5 86 M8 31 8 200
MDXMAXX 112-22 C160 28 x 60 160 110 12 M10 130 3,5 219 174 172 – 102 47,5 – M8 31 8 226
* Le quote z1, z2 e p2 si riferiscono alla versione con inverter 8200 Motec. Per maggiori informazioni consultate il ns. Ufficio Tecnico.

Motori ACMDxMA
2-12 Drives, motori, automazione 9/2006
2
Encoder incrementali
Resolver
Tipo ITD 21 A4 TTL line driver per servoinverter 9300
Tipo TTLNumero impulsi [imp/giro] 2048 (512) Canali A, B, zero CTensione alimentazione [V DC] 5 ± 5%Frequenza limite [kHz] 300 Temperatura ambiente [°C] –20°...+100°Protezione IP54Velocità massima [min–1] 8000Peso [g] 300Esecuzione A4
Tipo ITD 21 A4 HTL per inverter 8200
Tipo HTLNumero impulsi [imp/giro] 2048 (512) Canali A, B, zero CTensione alimentazione [V DC] 8...30Frequenza limite [kHz] 300 Temperatura ambiente [°C] –20°...+100°Protezione IP54Velocità massima [min–1] 8000Peso [g] 300Esecuzione A4
Tipo RS per servoinverter 9300
Tensione in entrata [V rms] 10 Frequenza in entrata [kHz] 4 Errore di fase max [arcmin] ± 10 Temperatura ambiente [°C] –10°...+150° Protezione IP53Velocità massima [min–1] 8000 Peso [g] 305 Esecuzione A4
Carichi Ammissibili
Motore tipo Albero Forza assiale Forza radiale
d x l Fa Fr1 Fr2
[mm] [N] [N] [N]
MDxMA 071 14x30 260 470 200
MDxMA 080 19x40 230 560 510
MDxMA 090 24x50 330 580 450
MDxMA 100 28x60 310 800 600
MDxMA 112 28x60 310 760 570
MDxMA 132 38x80 350 1100 820
MDxMA 160 42x110 950 1240 950
MDxMA 180 48x110 2240 3120 2300
Fax
d
l
l/2
Fr2
Fr1
Basi di calcolo: durata del cuscinetto = 20.000 hcoppia = 2,5 MN
Tra Fr1 e Fr2 è possibile interpolare linearmente
Sensori
Tipo SCM 70 per servoinverter 9300
Massima velocità continuativa [giri/min] 12000
Riferimento di posizione [giri] 4096 (multigiro)
Periodi [n°/giro] 512
Frequenza massima [kHz] 100
Tensione di alimentazione [V] 7 ... 12
Assorbimento [mA] 100 ... 130
Segnale in uscita Due segnali sinusoidali sfasati di90° con uscita seriale RS485asincrona halfduplex
Tipo ITD 22 A4 per servoinverter 9300
Massima velocità continuativa [giri/min] 8000
Riferimento di posizione [giri] 1 (monogiro)
Periodi [n°/giro] 2048
Frequenza massima [kHz] 180
Tensione di alimentazione [V] 5 ± 10%
Assorbimento [mA] < 100
Segnale in uscita Due segnali sinusoidali sfasati di90° con uscita seriale RS485asincrona halfduplex
Encoder Sin Cos monogiro
Encoder Sin Cos multigiro

Motori ACMDxMA
2-13Drives, motori, automazione 9/2006
2
Servoventilatore
Motore Alimentazione Tensione di alimentazione Corrente assorbita Potenza
VN [V] IN [A] PN [kW]
MDxMA 071 Monofase 50/60 Hz 220 ... 240 0,12 / 0,11 19360 ... 420 0,07 / 0,06 19
MDxMA 080 Monofase 50/60 Hz 220 ... 240 0,32 / 0,25 46360 ... 420 0,16 / 0,13 41
MDxMA 090 Monofase 50/60 Hz 220 ... 240 0,22 / 0,27 50Trifase 50/60 Hz Y 360 ... 530 - Δ 210 ... 305 Y 0,08 / 0,07 - Δ 0,14 / 0,12 41
MDxMA 100 Monofase 50/60 Hz 220 ... 240 0,16/0,18 30Trifase 50/60 Hz Y 360 ... 530 - Δ 210 ... 305 Y 0,08 / 0,07 - Δ 0,14 / 0,12 41
MDxMA 112 Monofase 50/60 Hz 220 ... 240 0,30/0,33 80Trifase 50/60 Hz Y 360 ... 530 - Δ 210 ... 305 Y 0,14 / 0,15 - Δ 0,24 / 0,26 41
MDxMA 132 Monofase 50/60 Hz 220 ... 240 0,55/0,74 125Trifase 50/60 Hz Y 360 ... 530 - Δ 210 ... 305 Y 0,26 / 0,30 - Δ 0,45 / 0,52 41
MDxMA 160 Monofase 50/60 Hz 220 ... 240 0,71/0,90 160Trifase 50/60 Hz Y 360 ... 530 - Δ 210 ... 305 Y 0,40 / 0,50 - Δ 0,70 / 0,87 41
MDxMA 180 Monofase 50/60 Hz 220 ... 240 0,71/0,90 160Trifase 50/60 Hz Y 360 ... 530 - Δ 210 ... 305 Y 0,40 / 0,50 - Δ 0,70 / 0,87 41
Freni
Questi freni ad azione inversa vengono attivati in caso diassenza della tensione di alimentazione (24 Vcc o 205 Vcc arichiesta). Impiegando cavi molto lunghi, occorre compensare la cadutadi tensione. Questo fenomeno risulta accentuato impiegandofreni a 24 V.
Motore Freno Mb Vb= In24V / In205V t1 ➀ t2 Qe ➁ Shü ➂ Jb ➃ mb ➃
tipo tipo [Nm] [VDC] [A] [ms] [ms] [kJ] [1/h] [kgcm2] [kg]
MDx MA 71 06 4 24/205 (+5%, -10%) 0,83 / 0,10 17 35 3 79 0,15 1,008 8 24/205 (+5%, -10%) 1,04 / 0,12 20 50 7,5 50 0,61 1,5
MDx MA 80 08 8 24/205 (+5%, -10%) 1,04 / 0,12 20 50 7,5 50 0,61 1,5
MDx MA 90 08 8 24/205 (+5%, -10%) 1,04 / 0,12 20 50 7,5 50 0,61 1,510 16 24/205 (+5%, -10%) 1,25 / 0,15 30 90 12 40 2,00 2,5
MDx MA 100 10 16 24/205 (+5%, -10%) 1,25 / 0,15 30 90 12 40 2,00 2,512 32 24/205 (+5%, -10%) 1,66 / 0,19 40 120 24 30 4,50 4,0
MDx MA 112 12 32 24/205 (+5%, -10%) 1,66 / 0,19 40 120 24 30 4,50 4,014 60 24/205 (+5%, -10%) 2,08 / 0,24 65 150 30 28 6,30 6,6
MDx MA 132 14 60 24/205 (+5%, -10%) 2,08 / 0,24 65 150 30 28 6,30 6,616 80 24/205 (+5%, -10%) 2,29 / 0,27 90 180 36 27 15,0 9,5
MDx MA 160 18 150 24/205 (+5%, -10%) 3,54 / 0,41 110 300 60 20 29,0 16,020 260 24/205 (+5%, -10%) 4,17 / 0,49 200 400 80 19 73,0 24,0
MDx MA 180 18 150 24/205 (+5%, -10%) 3,54 / 0,41 110 300 60 20 29,0 16,020 260 24/205 (+5%, -10%) 4,17 / 0,49 200 400 80 19 73,0 24,0
– Dati relativi ad un funzionamento con la bobina del freno alla temperatura di 20° C.➀ Tempi di risposta riferiti ad una commutazione dal lato corrente continua e con traferro nominale. Commutando dal lato corrente alternata,
i tempi indicati possono aumentare fino a sei volte.➁ Lavoro massimo ammissibile per una singola manovra alla velocità di 1500 min-1.➂ Frequenza di calcolo (secondo VDI 2241) necessaria per determinare la massima frequenza di commutazione o il lavoro di frizione.➃ Per ottenere il momento d’inerzia e il peso dei motori con freno occorre sommare questi valori a quelli riportati nelle tabelle dei motori.
Per i cavi di sistema Lenze, calcolate come segue:
Δ VB = 0,08 · Icavo [m] · IB [A]
Accessori
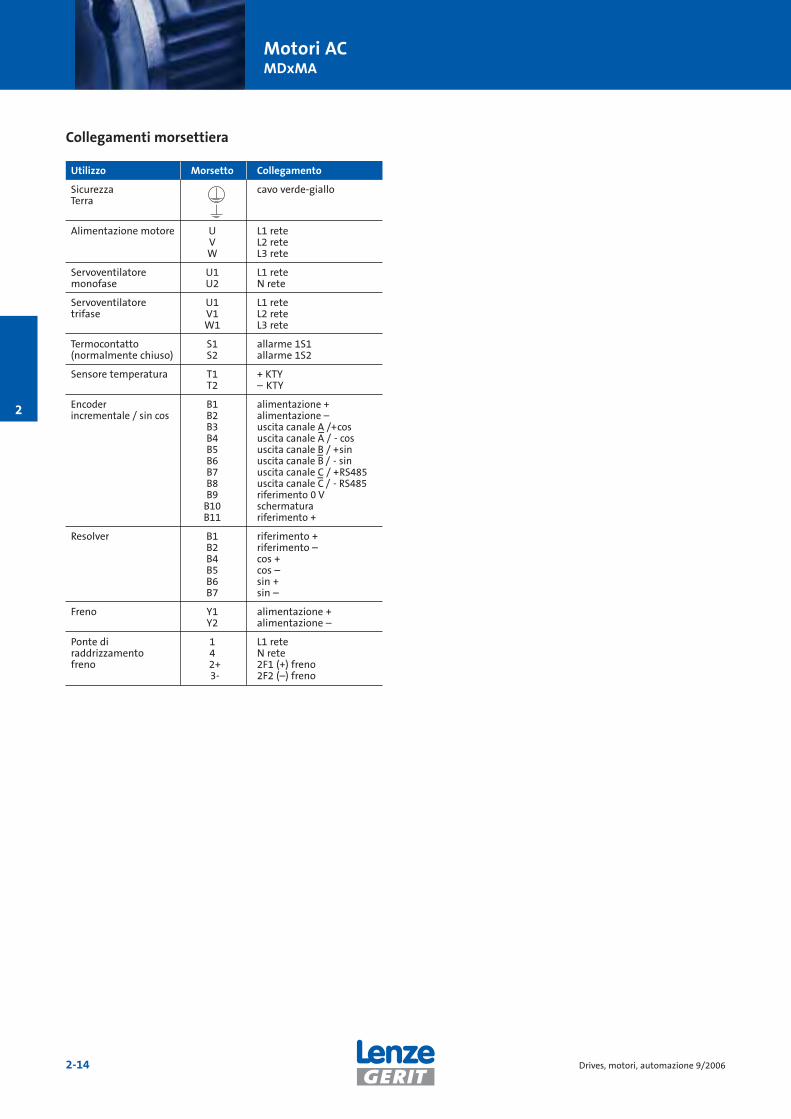
Motori ACMDxMA
2-14 Drives, motori, automazione 9/2006
2
Utilizzo Morsetto Collegamento
Sicurezza cavo verde-gialloTerra
Alimentazione motore U L1 reteV L2 reteW L3 rete
Servoventilatore U1 L1 rete monofase U2 N rete
Servoventilatore U1 L1 retetrifase V1 L2 rete
W1 L3 rete
Termocontatto S1 allarme 1S1(normalmente chiuso) S2 allarme 1S2
Sensore temperatura T1 + KTYT2 – KTY
Encoder B1 alimentazione +incrementale / sin cos B2 alimentazione –
B3 uscita canale A /+cosB4 uscita canale A
–/ - cos
B5 uscita canale B / +sinB6 uscita canale B
–/ - sin
B7 uscita canale C / +RS485B8 uscita canale C
–/ - RS485
B9 riferimento 0 VB10 schermaturaB11 riferimento +
Resolver B1 riferimento +B2 riferimento –B4 cos +B5 cos –B6 sin +B7 sin –
Freno Y1 alimentazione +Y2 alimentazione –
Ponte di 1 L1 reteraddrizzamento 4 N retefreno 2+ 2F1 (+) freno
3- 2F2 (–) freno
Collegamenti morsettiera

Servomotori
2-15Drives, motori, automazione 9/2006
22
I servosistemi sono attualmente soggetti ad una domandasempre crescente. L’offerta Lenze L-force è basata sunumerose tipologie di drive e motori, perfettamentearmonizzati fra loro, in grado di assicurare la scelta ottimale.I servomotori Lenze hanno un ruolo importante da giocare. Imotori sincroni ed asincroni sono perfettamente cucitisull’applicazione e soddisfano completamente le esigenzedinamiche, precisione e sintonia col drive. Essi sonodisponibili in un’ampia gamma di coppie e potenze.
DinamicaTutti i servomotori Lenze offrono momenti d’inerziacontenuti ed un’elevata capacità di sovraccarico. Il sensoretermico integrato assicura un preciso controllo continuodella temperatura. In combinazione con i servo 9300 ed ECS,i motori assicurano un’elevata precisione nella velocità,un’ideale rotondità di rotazione e accelerazioni angolarirepentine.
PrecisioneL’impiego di magneti ad elevata energia, in Neodimio FerroBoro (NdFeB) e della tecnologia SEpT (Single Element poleTechnology) assicura minime distorsioni del campomagnetico nell’intero andamento sinusoidale deiservomotori sincroni MCS. Questo assicura sia un’eccellenterotondità di rotazione (dovuta all’assenza di distorsione delcampo), sia la massima densità di potenza (il campo di
lavoro è generato quasi totalmente per induzione). Questecaratteristiche determinano una quasi totale assenza didistorsione e delle coppie resistenti.
Lunga durataGli altissimi livelli qualitativi raggiunti da Lenze assicurano ipiù elevati standard in termini di affidabilità e durata deipropri servomotori. Ad esempio, gli avvolgimenti conisolamento rinforzato con elevata riserva termica(isolamento per temperature classe H, per impiego classe F)oppure l’adozione di una struttura lamellare dellacarcassa/statore, garantiscono un perfetto funzionamentoanche in condizioni estreme e con forti vibrazioni. Miglioracosì l’efficienza nella dissipazione del calore, si ottiene unagrande capacità di sovraccarico ed una maggior robustezza. Icuscinetti rinforzati impiegano grasso per alte temperature esono generosamente dimensionati per assicurare lamassima durata.
Servomotori Lenze
Robustezza senza pari
Alte prestazioni

Servomotori
2-16 Drives, motori, automazione 9/2006
2
AffidabilitàLa protezione IP54 standard, offerta dalle serie MCS e MCAfornisce un buon livello di protezione contro sporco edacqua. In caso di asigenze superiori, i servomotori MCS eMCA sono anche disponibili in versione IP65.
Conformità CE Tutti i servomotori Lenze sono conformi alle seguentidirettive:˘ Conformità CE alla direttiva bassa tensione˘ Conformità CE alla direttiva sulla compatibilità
elettromagnetica per l’impiego in abbinamento a inverter.L’impiego dei cavi di sistema Lenze semplifica l’installazioneed assicura la compatibilità elettromagnetica.
Certificazione UL Tutti i servomotori Lenze serie MCS e MCA sono idonei perl’impiego nelle Americhe e sono forniti con certificato UR(eccetto la versione con freno a 205V).
Velocità idealiI riduttori Lenze, con la loro ampia gamma di rapporti diriduzione finemente intervallati (passi minimi i = 1,12),consentono una scelta ottimale della velocità in uscita. Iservomotori MCS e MCA sono integrabili nella carcassa delriduttore e costituiscono una combinazione estremamentecompatta. In alternativa i servomotori possono essereinstallati sul riduttore in modo convenzionale, tramiteflangia.
FlessibiliLa struttura modulare dei motori e degli accessori permettedi realizzare soluzioni ottimizzate per tutte le applicazioni.sempre a questo scopo, i motori ed i motoriduttori sonodisponibili in numerose varianti sul lato uscita:˘ Servomotori con albero d’uscita con o senza chiavetta ˘ Servo motoriduttori con albero sporgente, albero cavo o
albero cavo e calettatore˘ Servomotori con o senza flangia, piedi o centraggio ˘ La gamma di sensori disponibili, permette al motore di
fornire la precisione richiesta: il resolver di precisionecostituisce la soluzione standard, l’encoder incrementaleoppure assoluto SinCos sono disponibili per applicazioniuniversali o dove sia richiesta una maggiore precisione.
˘ Realizzati su misura per i differenti motori, i freni distazionamento a magnete permanente o a molla condifferenti coppie, consentono il mantenimento dellaposizione anche a motore disinserito.
SilenziosiL’elevata frequenza di commutazione degli inverter Lenze(fino a 16 kHz) e una circuitazione magnetica realizzataappositamente permettono una silenziosità elevata. Anche iriduttori sono molto silenziosi grazie alla geometriaottimizzata delle dentature e alle nervature interne allacarcassa in ghisa sferoidale.
CompattiL’elevata densità di potenza dei servomotori Lenze consentela realizzazione di unità di azionamento molto piccole e concaratteristiche dimamiche superiori. I servo motoriduttoriLenze, caratterizzati dalla perfetta integrazione dei motori edei riduttori, migliorano ulteriormente la grandecompattezza.
Gioco ridottoI riduttori Lenze si distinguono per il gioco contenuto degliaccoppiamenti e per la precisione di lavorazione dei loroingranaggi. Rispetto ai riduttori simili, i riduttori Lenzeoffrono un gioco ridotto in uscita e risultano ideali in ogniapplicazione servo. In aggiunta, i freni a magnetepermanente senza gioco assicurano la posizione anche nelcaso in cui l’azionamento è elettricamente scollegato. Per le applicazioni di maggiore precisione, le combinazionifra i servomotori MCS e MCA e gli specifici riduttoriepicicloidali GPA assicurano eccellenti prestazioni e giochiancora più contenuti. Per garantire la massima affidabilitàdella trasmissione di potenza nelle applicazioni servo ad altadinamica, tutti i motoriduttori impiegano accoppiamenti perattrito.Dal nostro sito, www.lenzegerit.it, sono liberamentescaricabili tutti i cataloghi in formato pdf.
Versioni speciali La nostra flessibilità progettuale e produttiva ci consente direalizzare nodelli speciali, realizzati su misura perapplicazioni specifiche.
Semplicità d’installazioneTutti i servomotori Lenze assicurano un’estrema semplicitàd’installazione e rapide sostituzioni in caso di necessità. Iconnettori dei motori MCS e MCA sono realizzati perprevenire collegamenti errati e possono essere ruotati di240° per facilitarne l’innesto o lo scollegamento in ognisituazione.
Non esitate a contattarci per maggiori informazioni.Dal sito www.lenze.de è possibile scaricare liberamente imanuali d’installazione e funzionamento di tutti iservomotori Lenze.

Servomotori
2-17Drives, motori, automazione 9/2006
2
MorsettieraMCS pag. 2-46MCA pag. 2-68MDFQA pag. 2-79
Cavi di sistemapag. 2-82
MCS servomotori sincronida pag. 2-25
MDFQA servomotori asincronida pag. 2-69
MCA servomotori asincronida pag. 2-47
Connettori di sistema
PM freno di stazionamentoa magneti permanenti
freno di stazionamentoa molle
Resolver/Encoder assolutoSinCos pag. 2-80
Encoder incrementalepag. 2-80

Servomotori
2-18 Drives, motori, automazione 9/2006
2
Tipologia
Servomotori sincroni ö ö ö ö ö
Servomotori asincroni ö ö ö ö ö ö ö ö ö ö
Velocità nominali
500...999 giri/min ö ö ö
1000...1499 giri/min ö ö ö ö ö ö
1500 ... 2499 giri/min ö ö ö ö ö ö ö ö ö
2500 ... 2999 giri/min ö ö
3000 ... 3999 giri/min ö ö ö ö ö ö ö ö ö ö
4000 ... 4999 giri/min ö ö ö ö ö ö ö ö
5000 ... 6000 giri/min ö ö
Dispositivo di retroazione
Resolver ö ö ö ö ö ö ö ö ö ö ö ö ö ö ö
Encoder SinCos monogiro o multigiro ö ö ö ö ö ö ö ö ö ö ö ö ö ö ö
Encoder incrementale ö ö ö ö ö ö ö ö ö ö
Senza retroazione ö ö ö ö
Forma costruttiva
B5 FF75 ö
B5A 120 FF100 ö ö
B5A 160 FF130 ö ö
B5A 200 FF165 ö ö ö
B5A 250 FF215 ö ö ö
B5A 300 FF265 ö ö
B5A 400 FF350 ö
B14 C105 ö
B14 C160 ö ö ö ö ö
B35 A250 FF215 ö
B35 A300 FF265 ö ö
B35 A400 FF350 ö
Albero d’uscita (con o senza chiavetta)
11 x 23 ö
14 x 30 ö ö
19 x 40 ö ö
24 x 50 ö ö ö
28 x 60 ö ö
38 x 80 ö ö ö
55 x 110 ö ö
Caratteristiche
MC
S 06
MC
S 09
MC
S 12
MC
S 14
MC
S 19
MC
A 1
0
MC
A 1
3
MC
A 1
4
MC
A 1
7
MC
A 1
9
MC
A 2
1
MD
xQA
100
MD
xQA
112
MD
xQA
132
MD
xQA
160

Servomotori
2-19Drives, motori, automazione 9/2006
2
Servomotori
MC
S 06
MC
S 09
MC
S 12
MC
S 14
MC
S 19
MC
A 1
0
MC
A 1
3
MC
A 1
4
MC
A 1
7
MC
A 1
9
MC
A 2
1
MD
xQA
100
MD
xQA
112
MD
xQA
132
MD
xQA
160
Tipologia
Servomotori sincroni ö ö ö ö ö
Servomotori asincroni ö ö ö ö ö ö ö ö ö ö
Freno
senza freno ö ö ö ö ö ö ö ö ö ö ö ö ö ö ö
con freno a magnete permanente, 24 V ö ö ö ö ö ö ö ö ö ö ö
con freno a magnete permanente, 205 V ö ö ö ö ö ö
con freno a molle, 24 V ö ö ö ö
con freno a molle, 24 V coppia maggiorata ö ö ö ö
con freno a molle, 205 V ö ö ö ö
con freno a molle, 205 V coppia maggiorata ö ö ö ö
Livello di vibrazioni, concentricità, rotondità (DIN 42955)
normale ö ö ö ö ö ö ö ö ö ö ö
ridotto ö ö ö ö
Tipo di collegamento
Due connettori per il motore e trasduttore ö ö ö ö ö ö ö ö ö ö ö
Morsettiera motore/ventilatore e connettore trasduttore ö ö ö ö ö ö ö ö ö ö
Morsettiera per motore e trasduttore ö ö ö ö ö ö ö ö ö ö ö
Tipo di protezione
IP54 ö ö ö ö ö ö ö ö ö ö ö
IP65 (solo con ventilazione naturale) ö ö ö ö ö ö ö ö ö ö ö
IP23s ö ö ö ö
Raffreddamento
Ventilazione naturale senza ventilatore ö ö ö ö ö ö ö ö ö ö ö
Ventilatore assiale 1 ph, 230 V ö ö ö ö ö
Ventilatore radiale 3 ph, 400 V senza filtro ö ö ö ö
Ventilatore radiale 3 ph, 400 V con filtro ö ö
Ventilatore radiale 3 ph, 350...540 V senza filtro ö ö ö ö
Ventilatore radiale 3 ph, 350...540 V con filtro ö ö ö ö
Protezione temperatura
KTY ö ö ö ö ö ö ö ö ö ö ö
KTY e TKO ö ö ö ö
Certificazioni
UR ö ö ö ö ö ö ö ö ö ö ö õ õ õ
MCS 06F MCS 09H MCS 12L

Servomotori
2-20 Drives, motori, automazione 9/2006
2
Servomotori
Motore tipo nN /nmax M0 Mmax MN PN I0 Imax IN Jmot
[giri/min] [Nm] [Nm] [Nm] [kW] [A] [A] [A] [kgm2·10-4]
MCS 06C41(L*) 4050/8000 (6500) 0.8 2.4 0.6 0.25 1.3 (2.5) 5.4 (10.8) 1.3 (2.5) 0.14
MCS 06C60(L*) 6000/8000 (8500) 0.8 2.4 0.5 0.31 2.4 (4.3) 10.8 (19) 2.4 (4.0) 0.14
MCS 06F41(L*) 4050/8000 (6500) 1.5 4.4 1.2 0.51 1.5 (2.9) 5.3 (10.5) 1.5 (2.9) 0.22
MCS 06F60(L*) 6000/8000 (8500) 1.5 4.4 0.9 0.57 2.9 (3.8) 10.5 (16.5) 2.5 (3.4) 0.22
MCS 06I41(L*) 4050/8000 (6500) 2.0 6.2 1.5 0.64 1.7 (3.1) 5.9 (11.8) 1.6 (2.9) 0.30
MCS 06I60(L*) 6000/8000 (8500) 2.0 6.2 1.2 0.75 3.4 (4.2) 11.8 (16) 2.9 (3.6) 0.30
MCS 09F38(L*) 3750/7000 (6500) 4.2 15.0 3.1 1.2 3.0 (6.0) 15 (30) 2.5 (5.0) 1.50
MCS 09F60(L*) 6000/7000 (8000) 4.2 15.0 2.4 1.5 6.0 (10.5) 30 (52.5) 4.5 (7.9) 1.50
MCS 09H41(L*) 4050/7000 (6500) 5.5 20.0 3.8 1.6 4.3 (8.5) 20 (40) 3.4 (6.8) 1.90
MCS 09H60(L*) 6000/7000 (8000) 5.5 20.0 3.0 1.9 8.5 (12) 40 (57) 6.0 (8.0) 1.90
MCS 12H15(L*) 1500/6000 (4000) 11.4 29.0 10.0 1.9 4.1 (8.2) 12 (24) 3.8 (7.6) 7.3
MCS 12H30(L*) (3000/6000) (11.4) (29.0) (8.0) (2.5) (13.5) (29) (10.5) (7.7)
MCS 12H35 3525/6000 11.4 29.0 7.5 2.8 8.2 24 5.7 7.3
MCS 12L20(L*) 1950/6000 (4000) 15.0 56.0 13.5 2.8 6.2 (12.4) 28 (57) 5.9 (11.8) 10.6
MCS 12L41 4050/6000 15.0 56.0 11.0 4.7 12.4 57 10.2 10.6
MCS 14D15 1500/6000 11.0 29.0 9.2 1.4 5.0 17 4.5 8.1
MCS 14D36 3600/6000 11.0 29.0 7.5 2.8 10.0 33 7.5 8.1
MCS 14H15 1500/6000 21.0 55.0 16.0 2.5 8.5 26 6.6 14.2
MCS 14H32 3225/6000 21.0 55.0 14.0 4.7 16.9 52 11.9 14.2
MCS 14L15 1500/6000 28.0 77.0 23.0 3.6 12.0 37 9.7 23.4
MCS 14L32 3225/6000 28.0 77.0 17.2 5.8 24.0 75 15.0 23.4
MCS 14P14 1350/6000 37.0 105.0 30.0 4.2 12.2 46 10.8 34.7
MCS 14P32 3225/6000 37.0 105.0 21.0 7.1 24.3 92 15.6 34.7
MCS 19F14 1425/4000 32.0 86.0 27.0 4.0 9.9 31 8.6 65.0
MCS 19F30 3000/4000 32.0 86.0 21.0 6.6 19.8 63 14.0 65.0
MCS 19J14 1425/4000 51.0 129.0 40.0 6.0 15.2 45 12.3 105.0
MCS 19J30 3000/4000 51.0 129.0 29.0 9.1 30.5 90 18.5 105.0
MCS 19P14 1350/4000 64.0 190.0 51.0 7.2 17.5 60 14.3 160.0
MCS 19P30 3000/4000 64.0 190.0 32.0 10.0 34.9 120 19.0 160.0
Dati tecnici servomotori sincroni MCS
* Modelli a 240 V per servoinverter Lenze serie 940 positioning. I relativi valori, quando differenti, sono tra parentesi.
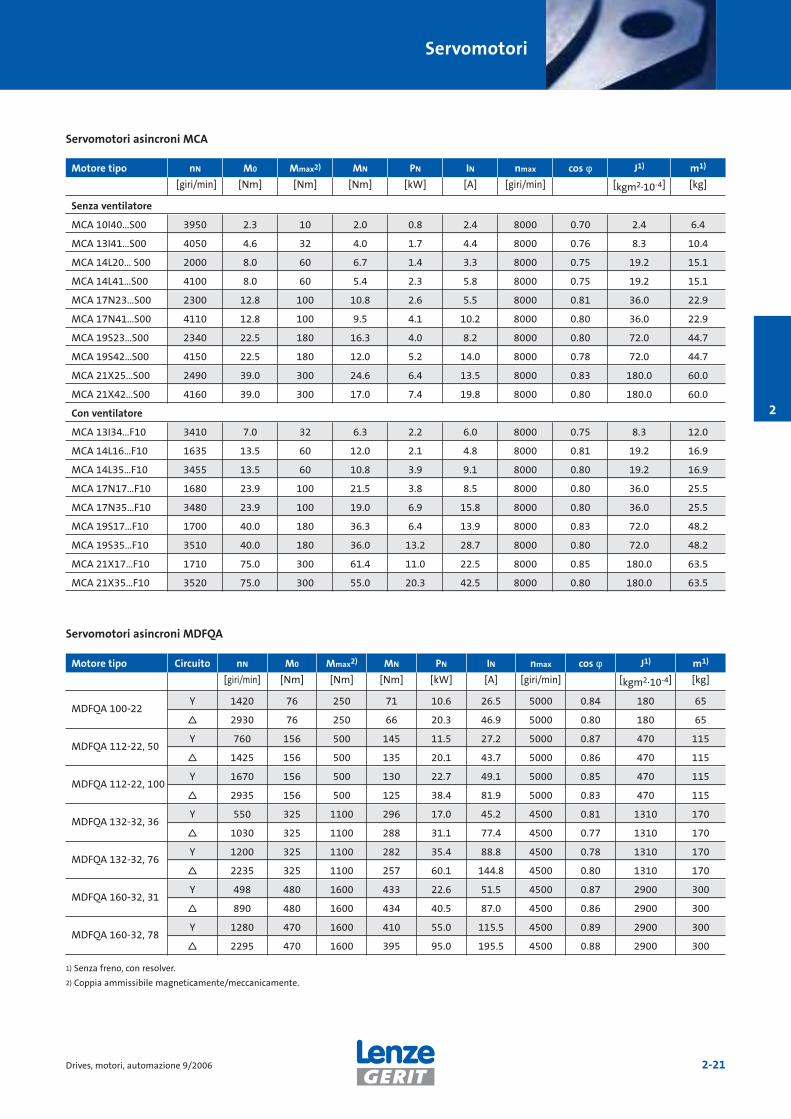
Servomotori
2-21Drives, motori, automazione 9/2006
2
1) Senza freno, con resolver.
2) Coppia ammissibile magneticamente/meccanicamente.
Motore tipo nN M0 Mmax2) MN PN IN nmax cos f J1) m1)
[giri/min] [Nm] [Nm] [Nm] [kW] [A] [giri/min] [kgm2·10-4] [kg]
Senza ventilatore
MCA 10I40…S00 3950 2.3 10 2.0 0.8 2.4 8000 0.70 2.4 6.4
MCA 13I41…S00 4050 4.6 32 4.0 1.7 4.4 8000 0.76 8.3 10.4
MCA 14L20… S00 2000 8.0 60 6.7 1.4 3.3 8000 0.75 19.2 15.1
MCA 14L41…S00 4100 8.0 60 5.4 2.3 5.8 8000 0.75 19.2 15.1
MCA 17N23…S00 2300 12.8 100 10.8 2.6 5.5 8000 0.81 36.0 22.9
MCA 17N41…S00 4110 12.8 100 9.5 4.1 10.2 8000 0.80 36.0 22.9
MCA 19S23…S00 2340 22.5 180 16.3 4.0 8.2 8000 0.80 72.0 44.7
MCA 19S42…S00 4150 22.5 180 12.0 5.2 14.0 8000 0.78 72.0 44.7
MCA 21X25…S00 2490 39.0 300 24.6 6.4 13.5 8000 0.83 180.0 60.0
MCA 21X42…S00 4160 39.0 300 17.0 7.4 19.8 8000 0.80 180.0 60.0
Con ventilatore
MCA 13I34…F10 3410 7.0 32 6.3 2.2 6.0 8000 0.75 8.3 12.0
MCA 14L16…F10 1635 13.5 60 12.0 2.1 4.8 8000 0.81 19.2 16.9
MCA 14L35…F10 3455 13.5 60 10.8 3.9 9.1 8000 0.80 19.2 16.9
MCA 17N17…F10 1680 23.9 100 21.5 3.8 8.5 8000 0.80 36.0 25.5
MCA 17N35…F10 3480 23.9 100 19.0 6.9 15.8 8000 0.80 36.0 25.5
MCA 19S17…F10 1700 40.0 180 36.3 6.4 13.9 8000 0.83 72.0 48.2
MCA 19S35…F10 3510 40.0 180 36.0 13.2 28.7 8000 0.80 72.0 48.2
MCA 21X17…F10 1710 75.0 300 61.4 11.0 22.5 8000 0.85 180.0 63.5
MCA 21X35…F10 3520 75.0 300 55.0 20.3 42.5 8000 0.80 180.0 63.5
Servomotori asincroni MCA
Motore tipo Circuito nN M0 Mmax2) MN PN IN nmax cos f J1) m1)
[giri/min] [Nm] [Nm] [Nm] [kW] [A] [giri/min] [kgm2·10-4] [kg]
MDFQA 100-22Y 1420 76 250 71 10.6 26.5 5000 0.84 180 65
Δ 2930 76 250 66 20.3 46.9 5000 0.80 180 65
Y 760 156 500 145 11.5 27.2 5000 0.87 470 115MDFQA 112-22, 50
Δ 1425 156 500 135 20.1 43.7 5000 0.86 470 115
Y 1670 156 500 130 22.7 49.1 5000 0.85 470 115MDFQA 112-22, 100
Δ 2935 156 500 125 38.4 81.9 5000 0.83 470 115
Y 550 325 1100 296 17.0 45.2 4500 0.81 1310 170MDFQA 132-32, 36
Δ 1030 325 1100 288 31.1 77.4 4500 0.77 1310 170
Y 1200 325 1100 282 35.4 88.8 4500 0.78 1310 170MDFQA 132-32, 76
Δ 2235 325 1100 257 60.1 144.8 4500 0.80 1310 170
Y 498 480 1600 433 22.6 51.5 4500 0.87 2900 300MDFQA 160-32, 31
Δ 890 480 1600 434 40.5 87.0 4500 0.86 2900 300
Y 1280 470 1600 410 55.0 115.5 4500 0.89 2900 300MDFQA 160-32, 78
Δ 2295 470 1600 395 95.0 195.5 4500 0.88 2900 300
Servomotori asincroni MDFQA

Servomotori
2-22 Drives, motori, automazione 9/2006
2
Caratteristiche ambientali e costruttive
Servomotori sincroni Servomotori asincroni Servomotori asincroniMCS MCA MDFQA
Protezione IP54/IP65 (solo con ventilazione naturale) IP23
Classe termica Funzionamento classe di temperatura F (VDE 0530); Isolamento avvolgimenti classe H
Conformità UL Componenti conformi UR Versione UL a richiesta *File n° File n° E 210321
E 210321
Livello d’isolamento Tensione massima Û = 1.5 kVMassima crescita di tensione du/dt = 5 kV/μs
Livello vibrazioni N N per taglie 10 e 13 NR dalla taglia 14
Rotondità, concentricità N N per taglie 10 e 13 NR dalla taglia 14
Tolleranza meccanica Diametro albero: k6 da ø 11 a ø 38; m6 fino ø 55Diametro centraggio flangia b1: J6
Rilevamento temperatura KTY 83 – 110 + 2x PTC 150° Sensore continuo KTY combinato MCS06: 1 x KTY 83 – 110 ** (KTY 83 – 110) (senza con termocontatto
termocontatto di protezione)
Collegamenti Connettore motore e freno, connettore resolver e sensore Collegamento motore condi temperatura, connettore ventilatore (MCA oltre la taglia 13) morsettiera, collegamento
o morsettiera encoder con spinotto
Campo di temperature –20 ... +40 °C senza riduzione di potenza (senza freno, ventilazione naturale) –10 to +40 °C senza riduzione di potenza (con freno)
–15 to +40 °C con ventilazione forzata
Umidità relativa fino 85 % senza condensa
Temperatura superficiale fino a 140 °C con ventilazione naturale fino a 140 °C fino a 110 °Ccon ventilazione forzata fino a 110 °C
Altitudine fino a 1000 m slm senza riduzione di potenza, fino a 4000 m con riduzione di potenza
Limite di smagnetizzazione >5 · IN con ventilazione naturale senza magneti permanenti
Coppia massima >4 · MN >5 · MN
Velocità nominale 1350 – 6000 giri/min 1635 – 4160 giri/min 550 – 2935 giri/min
Retroazione Resolver/Encoder Resolver/Encoder incrementale/Encoderassoluto SinCos assoluto SinCos
Forma costruttiva B5 B5 / B14 B5 / B35
Stoccaggio Deep-groove ball bearing with high-temperature resistant grease, sealing disc/cover plate Locating bearing on the B-side Locating bearing on the A-side Locating bearing on the B-side
Albero d’uscita Con o senza chiavetta
Freno Con o senza freno a magnete permanente Con o senza freno a molla
Ventilazione solo ventilazione naturale Possibile ventilatore assiale Ventilatore radialedalla taglia 13
Colore Nero, RAL 9005
* Escluso MDFQA 160.** Non assicurano la totale protezione del motore.

Servomotori
2-23Drives, motori, automazione 9/2006
2
Concentricità del riscontro della flangia ed eccentricità dell’albero
Motore Forma Diametro Diametro Concentricità flamgia Albero Eccentricità alberotipo costruttiva centraggio m [mm] y [mm] d [mm] x [mm]
b1 [mm]N R N R
MCS 06 B5 60 65 0.08 0.04 11 0.035 0.018
MCS 09 B5 80 85 0.08 0.04 14 0.035 0.018
MCS 12 B5 110 115 0.1 0.05 19 0.040 0.021
MCS 14 B5 130 135 0.1 0.05 24 0.040 0.021
MCS 19 B5 180 185 0.1 0.05 28 0.040 0.021
MCA 10 B5 80 113 0.08 0.04 14 0.035 0.018B14 70 98 0.08 0.04 14 0.035 0.018
MCA 13 B5, B14 110 149 0.1 0.05 19 0.04 0.021
MCA 14 B5 130 188 0.1 0.05 24 0.04 0.021B14 110 149 0.1 0.05 24 0.04 0.021
MCA 17 B5 130 188 0.1 0.05 24 0.04 0.021B14 110 149 0.1 0.05 24 0.04 0.021
MCA 19 B5 180 239 0.1 0.05 28 0.04 0.021B14 110 149 0.1 0.05 28 0.04 0.021
B5 180 239 0.1 0.05 38 0.05 0.025MCA 21 B5, A300 230 289 0.1 0.05 38 0.05 0.025
B14 110 149 0.1 0.05 38 0.05 0.025
- Valori di concentricità ed eccentricità secondo DIN 42 955
- I valori raccomandati indicati in grasssetto
Livello vibrazioni
Motore Massimo livello RMS tipo di vibrazione
[mm/s]N R
MCS 06 1.8 1.12
MCS 09 1.8 1.12
MCS 12 1.8 1.12
MCS 14 1.8 1.12
MCS 19 1.8 1.12
Mmax 10 13 1.8 1.12
MCA 14-21 1.8 1.12
- Livello di vibrazioni secondo DIN VDE 0530 Parte 14(n = 600...3600 giri/min)
- I valori raccomandati indicati in grasssetto B y
d
10
B
A x
l/2
b1
B y
m
A
+-1 Distanza della flangiaper il controllo dellaconcentricità

Servomotori
2-24 Drives, motori, automazione 9/2006
2
Tutti i dati riportati nelle tabelle e nei grafici dei servomotorisono validi per una temperatura ambiente max di 40°C e unaltitudine fino a 1000 m slm.In caso di differenti condizioni di funzionamento ed’installazione, occorrerà considerare dei fattori dicorrezione.
Influsso della temperatura ambiente e dell’altitudine
Cop
pia
am
mis
sib
ileM
per
m/M
con
t40
°C 1
000
m
20 30 40 50 60Temperatura aria di raffreddamento/Temperatura ambiente [°C]
Altitudine < 1000 m
< 2000 m
< 3000 m
< 4000 m
Servomotori sincroni MCS
Servomotori asincroni MCA e MDFQA, con ventilatore MCA ... F 10 a MDFQAMassima temperatura ambiente 40 °C
1.20
1.00
0.80
0.60
0.40
020
Cop
pia
am
mis
sib
ileM
per
m/M
con
t40
°C 1
000
m
20 30 40 50 60Temperatura aria di raffreddamento/Temperatura ambiente [°C]
Altitudine < 1000 m
< 2000 m
< 3000 m
< 4000 m
1.20
1.00
0.80
0.60
0.40
020
> 40 °C solo senza ventilatore
> 40 °C solo senza ventilatore

Servomotori sincroniMCS
2-25Drives, motori, automazione 9/2006
2
Gli avvolgimenti dello statore sono realizzati impiegando lametodologia SEpT (Single Element pole Technology). La combinazione con magneti permanenti ad elevataenergia, in neodimio ferro boro (NdFeB) si ottengonocaratteristiche eccezzionali. Da un lato viene assicurato unsignificativo incremento della densità di potenza, allo stessotempo si riduce il momento d’inerzia assicurando eccellentiprestazioni dinamiche. Dall’altro lato viene ottimizzata larotondità di rotazione e minimizzate le coppie residue. Larealizzazione è molto robusta ed impiega cuscinettirinforzati per alte temperature. La protezione IP 54/64assicura la massima affidabilità ed una lunga durata anchein condizioni molto gravose.
Servomotori MCS: avvolgimenti statorecon tecnologia SEpT
FEM calculation
Ideali per dinamica e precisione
Grande densità di potenza
Servomotori sincroni serie MCS0,6...32 Nm, 0,25...10 kW
Le curve coppia/velocità relative al funzionamento in abbina-mento a servoinverter sono scaricabili liberamente dal nostrosito, www.lenzegerit.it
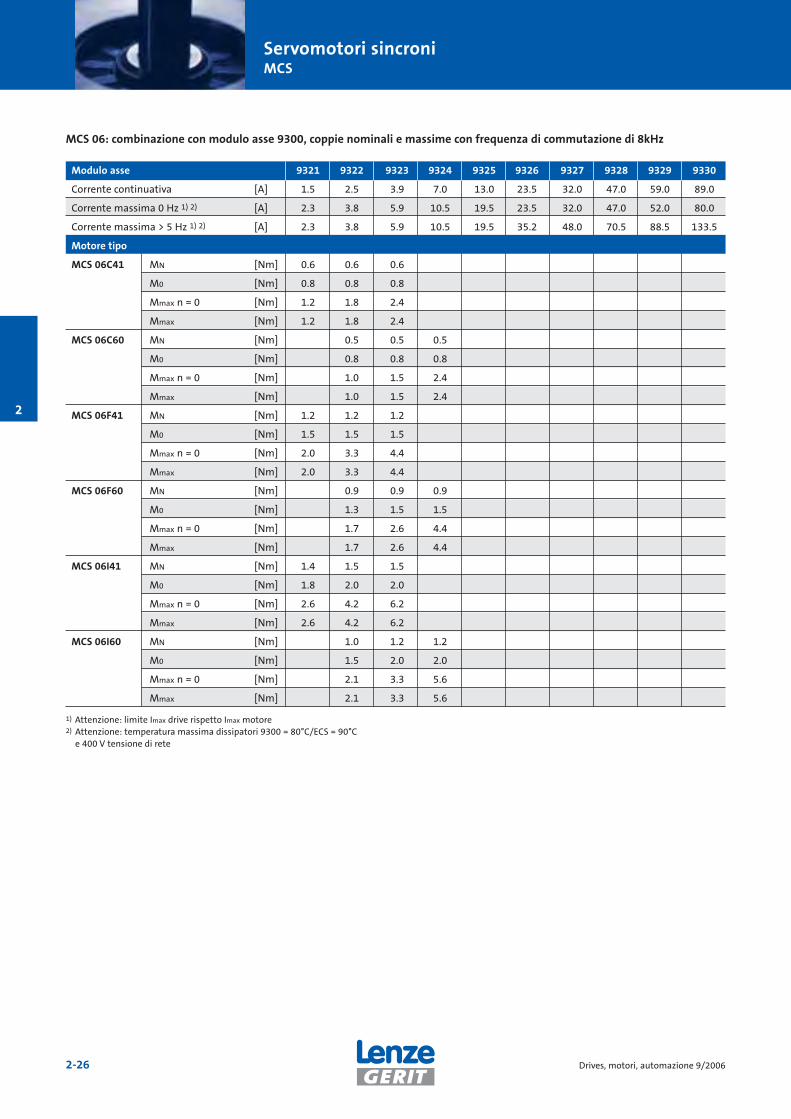
Servomotori sincroniMCS
2-26 Drives, motori, automazione 9/2006
2
1) Attenzione: limite Imax drive rispetto Imax motore2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C
e 400 V tensione di rete
MCS 06: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
Modulo asse 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330
Corrente continuativa [A] 1.5 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0
Corrente massima 0 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0
Corrente massima > 5 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 35.2 48.0 70.5 88.5 133.5
Motore tipo
MCS 06C41 MN [Nm] 0.6 0.6 0.6
M0 [Nm] 0.8 0.8 0.8
Mmax n = 0 [Nm] 1.2 1.8 2.4
Mmax [Nm] 1.2 1.8 2.4
MCS 06C60 MN [Nm] 0.5 0.5 0.5
M0 [Nm] 0.8 0.8 0.8
Mmax n = 0 [Nm] 1.0 1.5 2.4
Mmax [Nm] 1.0 1.5 2.4
MCS 06F41 MN [Nm] 1.2 1.2 1.2
M0 [Nm] 1.5 1.5 1.5
Mmax n = 0 [Nm] 2.0 3.3 4.4
Mmax [Nm] 2.0 3.3 4.4
MCS 06F60 MN [Nm] 0.9 0.9 0.9
M0 [Nm] 1.3 1.5 1.5
Mmax n = 0 [Nm] 1.7 2.6 4.4
Mmax [Nm] 1.7 2.6 4.4
MCS 06I41 MN [Nm] 1.4 1.5 1.5
M0 [Nm] 1.8 2.0 2.0
Mmax n = 0 [Nm] 2.6 4.2 6.2
Mmax [Nm] 2.6 4.2 6.2
MCS 06I60 MN [Nm] 1.0 1.2 1.2
M0 [Nm] 1.5 2.0 2.0
Mmax n = 0 [Nm] 2.1 3.3 5.6
Mmax [Nm] 2.1 3.3 5.6

Servomotori sincroniMCS
2-27Drives, motori, automazione 9/2006
2
1) Attenzione: limite Imax drive rispetto Imax motore2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C
e 400 V tensione di rete4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
MCS 06: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore tipo
MCS 06C41 MN [Nm] 0.6
M0 [Nm] 0.8
Mmax n = 0 4) [Nm] 1.2
Mmax [Nm] 1.9
MCS 06C60 MN [Nm] 0.4 0.5
M0 [Nm] 0.6 0.8
Mmax n = 0 4) [Nm] 0.6 1.2
Mmax [Nm] 1.0 1.9
MCS 06F41 MN [Nm] 1.2
M0 [Nm] 1.5
Mmax n = 0 4) [Nm] 2.0
Mmax [Nm] 3.5
MCS 06F60 MN [Nm] 0.7 0.9
M0 [Nm] 1.0 1.5
Mmax n = 0 4) [Nm] 1.0 2.0
Mmax [Nm] 1.8 3.5
MCS 06I41 MN [Nm] 1.5 1.5
M0 [Nm] 2.0 2.0
Mmax n = 0 4) [Nm] 2.6 5.0
Mmax [Nm] 4.4 6.2
MCS 06I60 MN [Nm] 0.8 1.2 1.2
M0 [Nm] 1.2 2.0 2.0
Mmax n = 0 4) [Nm] 1.3 2.6 4.9
Mmax [Nm] 2.2 4.4 6.2

Servomotori sincroniMCS
2-28 Drives, motori, automazione 9/2006
2
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
M4 M4 M1m UB 1) IB 2) JB t1 3) t2 3) 4) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1 04H 2.2 2 0.6 24 0.34 0.12 15 30 29.6 0.27
MCS 06C41, MCS 06C60MCS 06F41, MCS 06F60MCS 06I41, MCS 06I60
1) Con oscillazioni < 1%.. 2) Valori massimi che si verificano a freno freddo (per dimensionare
l’alimentatore). Quando il motore raggiunge la temperatura difunzionamento, tali valori diminuiscono.
3) Tempi d’inserzione e disinserzione validi con una tensione d’alimentazionenominale (± 0%) e circuito di protezione con commutazione lato DC. Senzatale circuito i tempi possono aumentare.
4) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio.In caso d’impiego di lunghi cavi di collegamento, la lororesistenza aumenterà e dovrà essere compensata da unamaggiore tensione d’alimentazione. La seguente formuladovrà essere applicata impiegando cavi Lenze:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.
Freno opzionale
I servomotori MCS possono essere forniti completi di freno amagnete permanente a 24 V. Il freno viene attivato in caso diassenza di alimentazione (principio ad azione inversa). Se ilfreno viene utilizzato come freno di stazionamento, esso non
sarà virtualmente soggetto ad usura. Non superando illavoro di commutazione, il freno assicurerà almeno 2000frenature d’emergenza.
0
100
200
300
400
500
600
700
800
-400 -300 -200 -100 0 100 200 300
Carichi radiali Fr1 e assiali Fa ammissibili
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
Valori calcolati applicando il caricoradiale sulla mezzeria dell’albero
U*[V] = UB [V] + 0.08V
x lcable [m] x IB [A]A · m

Servomotori sincroniMCS
2-29Drives, motori, automazione 9/2006
2
Motore tipo Motore senza freno Motore con 22,426
k [mm] l [mm] lx [mm] k [mm] l [mm] lx [mm]
MCS 06C 132 155 236.5 150.5 173.5 255
MCS 06F 162 185 266.5 180.5 203.5 285
MCS 06I 192 215 296.5 210.5 233.5 315
MCS 06: dimensioni
l Lunghezza motore completo di resolverlx Lunghezza motore completo di un encoder assoluto
Chiavetta 4 x 18 mm(DIN 6885, foglio 1)

Servomotori sincroniMCS
2-30 Drives, motori, automazione 9/2006
2
1) Attenzione: limite Imax drive rispetto Imax motore2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C
e 400 V tensione di rete
MCS 09: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
Modulo asse 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330
Corrente continuativa [A] 1.5 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0
Corrente massima 0 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0
Corrente massima > 5 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 35.2 48.0 70.5 88.5 133.5
Motore tipo
MCS 09F38 MN [Nm] 3.1 3.1 3.1
M0 [Nm] 3.5 4.2 4.2
Mmax n = 0 [Nm] 5.2 7.7 12.0
Mmax [Nm] 5.2 7.7 12.0
MCS 09F60 MN [Nm] 2.4 2.4
M0 [Nm] 4.2 4.2
Mmax n = 0 [Nm] 6.9 11.4
Mmax [Nm] 6.9 11.4
MCS 09H41 MN [Nm] 2.8 3.8 3.8 3.8
M0 [Nm] 3.2 5.0 5.5 5.5
Mmax n = 0 [Nm] 4.9 7.5 12.5 20.1
Mmax [Nm] 4.9 7.5 12.5 20.1
MCS 09H60 MN [Nm] 3.0 3.0 3.0
M0 [Nm] 4.5 5.5 5.5
Mmax n = 0 [Nm] 6.8 11.8 13.8
Mmax [Nm] 6.8 11.8 13.8

Servomotori sincroniMCS
2-31Drives, motori, automazione 9/2006
2
1) Attenzione: limite Imax drive rispetto Imax motore2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C
e 400 V tensione di rete4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
MCS 09: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore tipo
MCS 09F38 MN [Nm] 2.5 3.1 3.1
M0 [Nm] 2.8 4.2 4.2
Mmax n = 0 4) [Nm] 3.2 6.2 10.8
Mmax [Nm] 5.5 9.8 14.9
MCS 09F60 MN [Nm] 2.1 2.4 2.4
M0 [Nm] 2.8 4.2 4.2
Mmax n = 0 4) [Nm] 3.2 6.1 10.8
Mmax [Nm] 5.5 9.8 14.9
MCS 09F41 MN [Nm] 3.8 3.8
M0 [Nm] 5.2 5.5
Mmax n = 0 4) [Nm] 5.9 11.1
Mmax [Nm] 9.9 17.5
MCS 09I60 MN [Nm] 3.0 3.0 3.0
M0 [Nm] 5.2 5.5 5.5
Mmax n = 0 4) [Nm] 5.9 11.1 15.5
Mmax [Nm] 10.0 17.5 20.5

Servomotori sincroniMCS
2-32 Drives, motori, automazione 9/2006
2
MCS 09FMCS 09H
Freno opzionale
I servomotori MCS possono essere forniti completi di freno amagnete permanente a 24 V. Il freno viene attivato in caso diassenza di alimentazione (principio ad azione inversa). Se ilfreno viene utilizzato come freno di stazionamento, esso non
sarà virtualmente soggetto ad usura. Non superando illavoro di commutazione, il freno assicurerà almeno 2000frenature d’emergenza.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio.In caso d’impiego di lunghi cavi di collegamento, la lororesistenza aumenterà e dovrà essere compensata da unamaggiore tensione d’alimentazione. La seguente formuladovrà essere applicata impiegando cavi Lenze:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
M4 M4 M1m UB 1) IB 2) JB t1 3) t2 3) 4) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1 07H 8.0 6 4.5 24 0.65 1.07 20 40 400 0.8
P2 07H 12 10 7.0 24 0.65 1.07 20 40 400 0.8
P1 = freno standard; P2 = freno rinforzato.1) Con oscillazioni < 1%.. 2) Valori massimi che si verificano a freno freddo (per dimensionare
l’alimentatore). Quando il motore raggiunge la temperatura difunzionamento, tali valori diminuiscono.
3) Tempi d’inserzione e disinserzione validi con una tensione d’alimentazionenominale (± 0%) e circuito di protezione con commutazione lato DC. Senzatale circuito i tempi possono aumentare.
4) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
0
200
400
600
800
-1000 -500 0 500 1000
Carichi radiali Fr1 e assiali Fa ammissibili
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
Valori calcolati applicando il caricoradiale sulla mezzeria dell’albero
U*[V] = UB [V] + 0.08V
x lcable [m] x IB [A]A · m
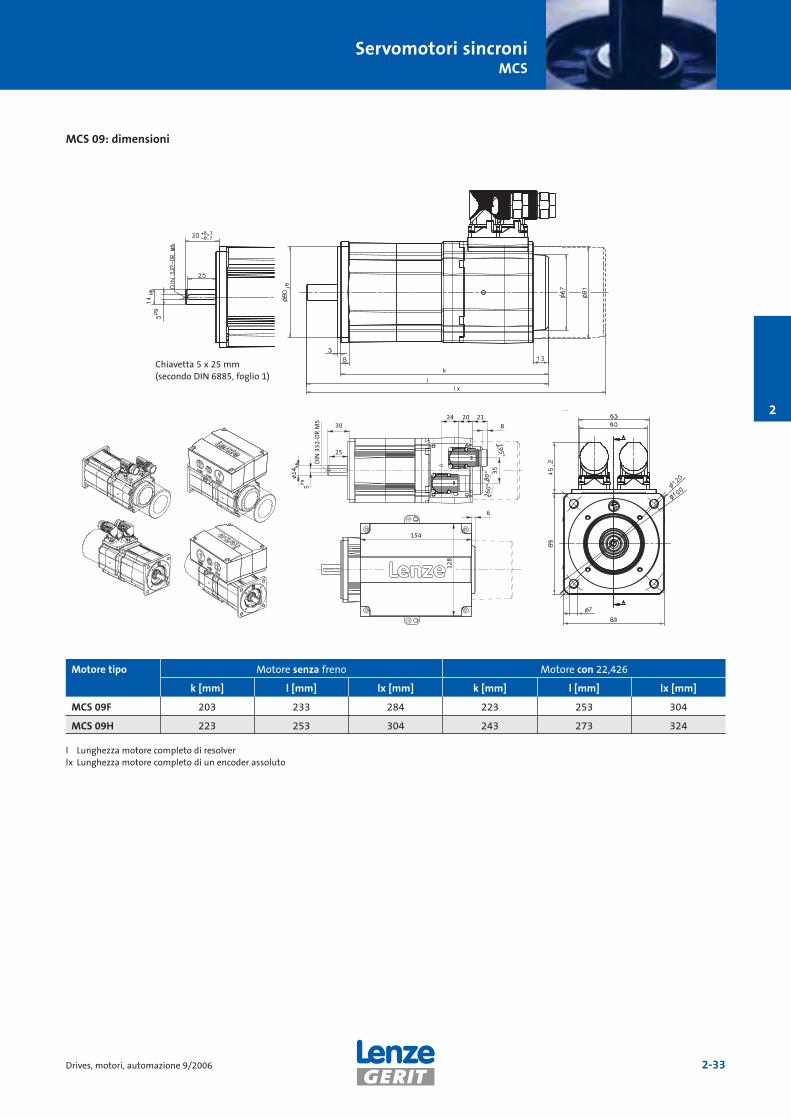
Servomotori sincroniMCS
2-33Drives, motori, automazione 9/2006
2
MCS 09: dimensioni
Chiavetta 5 x 25 mm(secondo DIN 6885, foglio 1)
Motore tipo Motore senza freno Motore con 22,426
k [mm] l [mm] lx [mm] k [mm] l [mm] lx [mm]
MCS 09F 203 233 284 223 253 304
MCS 09H 223 253 304 243 273 324
l Lunghezza motore completo di resolverlx Lunghezza motore completo di un encoder assoluto

Servomotori sincroniMCS
2-34 Drives, motori, automazione 9/2006
2
1) Attenzione: limite Imax drive rispetto Imax motore2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C
e 400 V tensione di rete
MCS 12: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
Modulo asse 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330
Corrente continuativa [A] 1.5 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0
Corrente massima 0 Hz 1) 2)) [A] 2.3 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0
Corrente massima > 5 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 35.2 48.0 70.5 88.5 133.5
Motore tipo
MCS 12H15 MN [Nm] 10.0 10.0
M0 [Nm] 10.9 11.4
Mmax n = 0 [Nm] 15.1 25.8
Mmax [Nm] 15.1 25.8
MCS 12H35 MN [Nm] 7.5 7.5
M0 [Nm] 9.8 11.4
Mmax n = 0 [Nm] 13.6 24.1
Mmax [Nm] 13.6 24.1
MCS 12L20 MN [Nm] 13.5 13.5
M0 [Nm] 15.0 15.0
Mmax n = 0 [Nm] 24.4 41.9
Mmax [Nm] 24.4 41.9
MCS 12L41 MN [Nm] 11.0 11.0 11.0
M0 [Nm] 15.0 15.0 15.0
Mmax n = 0 [Nm] 22.8 27.0 35.5
Mmax [Nm] 22.8 27.0 35.5

Servomotori sincroniMCS
2-35Drives, motori, automazione 9/2006
2
1) Attenzione: limite Imax drive rispetto Imax motore2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C
e 400 V tensione di rete4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
MCS 12: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore tipo
MCS 12H15 MN [Nm] 10.0 10.0
M0 [Nm] 11.2 11.4
Mmax n = 0 4) [Nm] 11.9 22.6
Mmax [Nm] 20.1 29.0
MCS 12H35 MN [Nm] 5.3 7.5 7.5
M0 [Nm] 5.6 11.2 11.4
Mmax n = 0 4) [Nm] 6.0 11.8 22.5
Mmax [Nm] 10.4 20.1 29.0
MCS 12L20 MN [Nm] 13.5 13.5
M0 [Nm] 15.0 15.0
Mmax n = 0 4) [Nm] 21.4 39.4
Mmax [Nm] 35.5 56.4
MCS 12L41 MN [Nm] 8.6 11.0 11.0 11.0
M0 [Nm] 9.7 15.0 15.0 15.0
Mmax n = 0 4) [Nm] 10.8 21.3 30.8 39.5
Mmax [Nm] 19.0 35.5 49.6 56.42
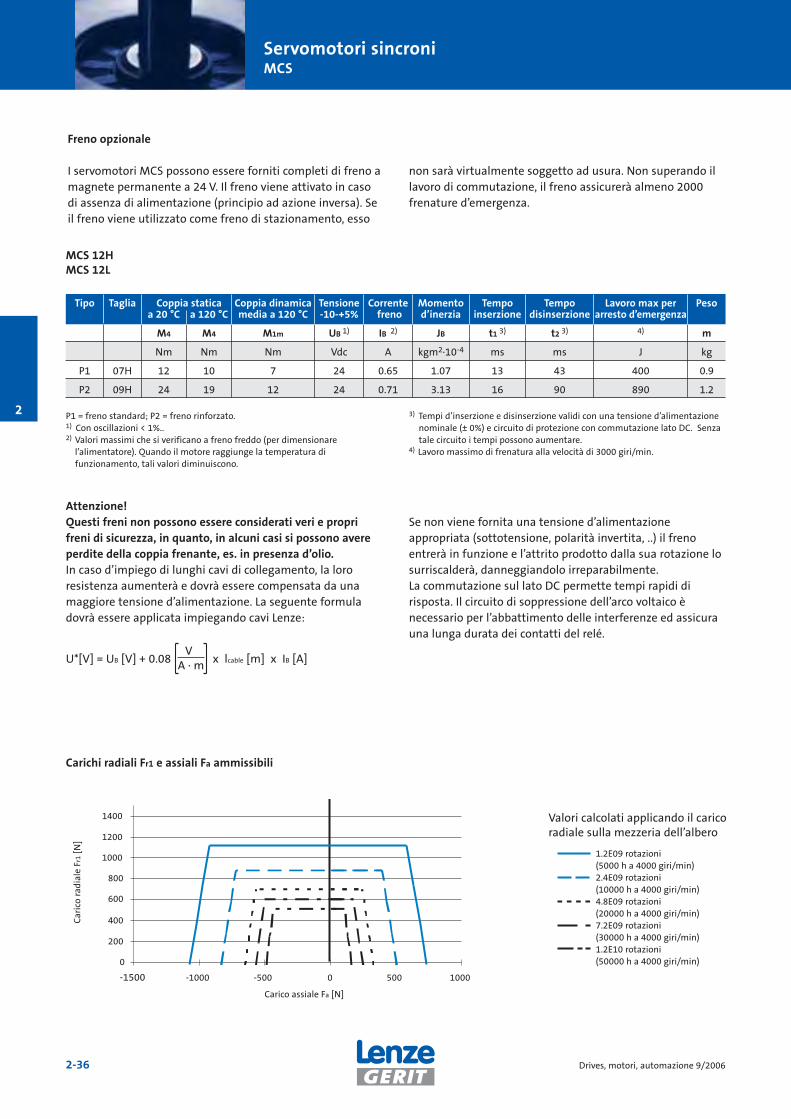
Servomotori sincroniMCS
2-36 Drives, motori, automazione 9/2006
2
MCS 12HMCS 12L
Freno opzionale
I servomotori MCS possono essere forniti completi di freno amagnete permanente a 24 V. Il freno viene attivato in casodi assenza di alimentazione (principio ad azione inversa). Seil freno viene utilizzato come freno di stazionamento, esso
non sarà virtualmente soggetto ad usura. Non superando illavoro di commutazione, il freno assicurerà almeno 2000frenature d’emergenza.
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
M4 M4 M1m UB 1) IB 2) JB t1 3) t2 3) 4) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1 07H 12 10 7 24 0.65 1.07 13 43 400 0.9
P2 09H 24 19 12 24 0.71 3.13 16 90 890 1.2
P1 = freno standard; P2 = freno rinforzato.1) Con oscillazioni < 1%.. 2) Valori massimi che si verificano a freno freddo (per dimensionare
l’alimentatore). Quando il motore raggiunge la temperatura difunzionamento, tali valori diminuiscono.
3) Tempi d’inserzione e disinserzione validi con una tensione d’alimentazionenominale (± 0%) e circuito di protezione con commutazione lato DC. Senzatale circuito i tempi possono aumentare.
4) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio.In caso d’impiego di lunghi cavi di collegamento, la lororesistenza aumenterà e dovrà essere compensata da unamaggiore tensione d’alimentazione. La seguente formuladovrà essere applicata impiegando cavi Lenze:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.
0
200
400
600
800
1000
1200
1400
-1500 -1000 -500 0 500 1000
Carichi radiali Fr1 e assiali Fa ammissibili
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
Valori calcolati applicando il caricoradiale sulla mezzeria dell’albero
U*[V] = UB [V] + 0.08V
x lcable [m] x IB [A]A · m

Servomotori sincroniMCS
2-37Drives, motori, automazione 9/2006
2
MCS 12: dimensioni
Chiavetta 6 x 32 mm(secondo DIN 6885, foglio 1)
Motore tipo Motore senza freno Motore con freno
k [mm] l [mm] lx [mm] k [mm] l [mm] lx [mm]
MCS 12H 228 268 317 248 288 337
MCS 12L 268 308 357 288 328 377
l Lunghezza motore completo di resolverlx Lunghezza motore completo di un encoder assoluto
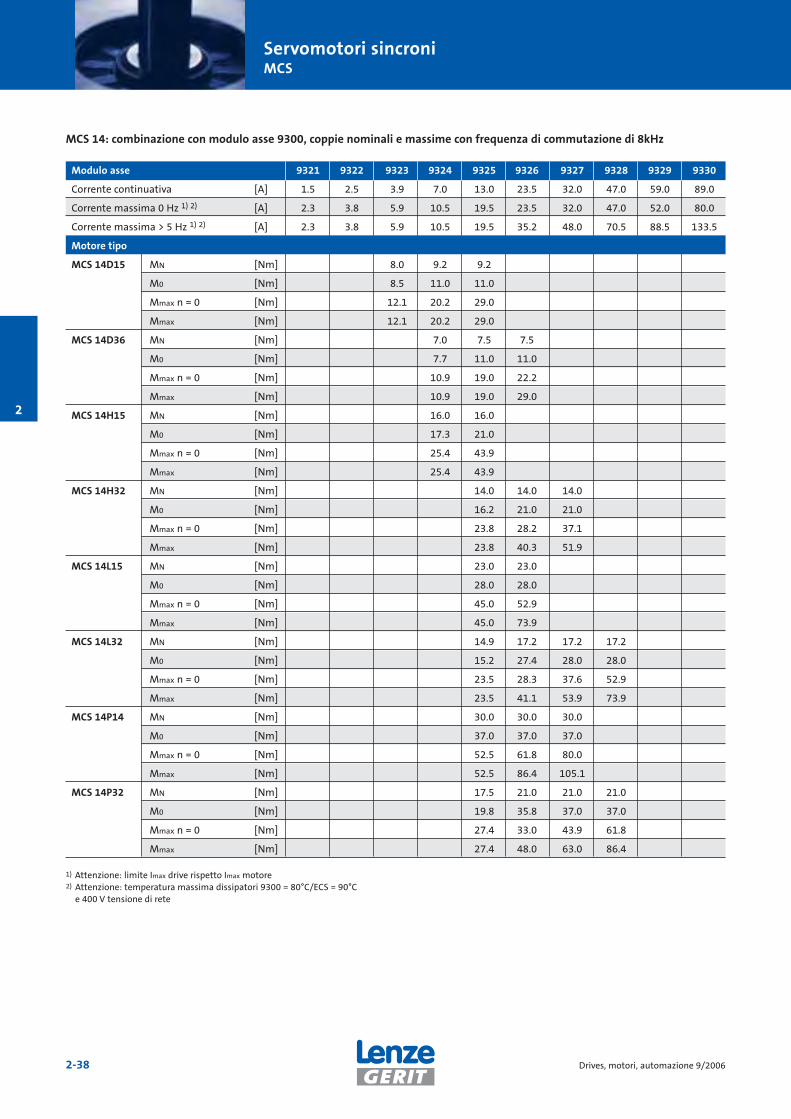
Servomotori sincroniMCS
2-38 Drives, motori, automazione 9/2006
2
MCS 14: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
Modulo asse 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330
Corrente continuativa [A] 1.5 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0
Corrente massima 0 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0
Corrente massima > 5 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 35.2 48.0 70.5 88.5 133.5
Motore tipo
MCS 14D15 MN [Nm] 8.0 9.2 9.2
M0 [Nm] 8.5 11.0 11.0
Mmax n = 0 [Nm] 12.1 20.2 29.0
Mmax [Nm] 12.1 20.2 29.0
MCS 14D36 MN [Nm] 7.0 7.5 7.5
M0 [Nm] 7.7 11.0 11.0
Mmax n = 0 [Nm] 10.9 19.0 22.2
Mmax [Nm] 10.9 19.0 29.0
MCS 14H15 MN [Nm] 16.0 16.0
M0 [Nm] 17.3 21.0
Mmax n = 0 [Nm] 25.4 43.9
Mmax [Nm] 25.4 43.9
MCS 14H32 MN [Nm] 14.0 14.0 14.0
M0 [Nm] 16.2 21.0 21.0
Mmax n = 0 [Nm] 23.8 28.2 37.1
Mmax [Nm] 23.8 40.3 51.9
MCS 14L15 MN [Nm] 23.0 23.0
M0 [Nm] 28.0 28.0
Mmax n = 0 [Nm] 45.0 52.9
Mmax [Nm] 45.0 73.9
MCS 14L32 MN [Nm] 14.9 17.2 17.2 17.2
M0 [Nm] 15.2 27.4 28.0 28.0
Mmax n = 0 [Nm] 23.5 28.3 37.6 52.9
Mmax [Nm] 23.5 41.1 53.9 73.9
MCS 14P14 MN [Nm] 30.0 30.0 30.0
M0 [Nm] 37.0 37.0 37.0
Mmax n = 0 [Nm] 52.5 61.8 80.0
Mmax [Nm] 52.5 86.4 105.1
MCS 14P32 MN [Nm] 17.5 21.0 21.0 21.0
M0 [Nm] 19.8 35.8 37.0 37.0
Mmax n = 0 [Nm] 27.4 33.0 43.9 61.8
Mmax [Nm] 27.4 48.0 63.0 86.4
1) Attenzione: limite Imax drive rispetto Imax motore2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C
e 400 V tensione di rete

Servomotori sincroniMCS
2-39Drives, motori, automazione 9/2006
2
MCS 14: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore tipo
MCS 14D15 MN [Nm] 8.2 9.2
M0 [Nm] 8.8 11.0
Mmax n = 0 4) [Nm] 9.6 17.9
Mmax [Nm] 16.0 28.3
MCS 14D36 MN [Nm] 7.5 7.5
M0 [Nm] 8.8 11.0
Mmax n = 0 4) [Nm] 9.5 17.8
Mmax [Nm] 16.0 28.3
MCS 14H15 MN [Nm] 16.0 16.0
M0 [Nm] 19.8 21.0
Mmax n = 0 4) [Nm] 22.3 41.2
Mmax [Nm] 37.1 54.8
MCS 14H32 MN [Nm] 14.0 14.0 14.0
M0 [Nm] 15.8 21.0 21.0
Mmax n = 0 4) [Nm] 22.2 32.1 41.3
Mmax [Nm] 37.1 51.9 54.8
MCS 14L15 MN [Nm] 19.0 23.0 23.0
M0 [Nm] 18.7 28.0 28.0
Mmax n = 0 4) [Nm] 21.9 42.1 59.9
Mmax [Nm] 37.6 68.5 77.1
MCS 14L32 MN [Nm] 14.6 17.2 17.2
M0 [Nm] 14.8 19.8 23.3
Mmax n = 0 4) [Nm] 21.8 32.4 42.2
Mmax [Nm] 37.6 53.9 68.5
MCS 14P14 MN [Nm] 30.0 30.0
M0 [Nm] 37.0 37.0
Mmax n = 0 4) [Nm] 49.1 70.0
Mmax [Nm] 80.0 105.1
MCS 14P32 MN [Nm] 17.1 21.0 21.0
M0 [Nm] 19.3 25.9 30.5
Mmax n = 0 4) [Nm] 25.4 37.9 49.3
Mmax [Nm] 43.9 63.0 80.0
1) Attenzione: limite Imax drive rispetto Imax motore2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C
e 400 V tensione di rete4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
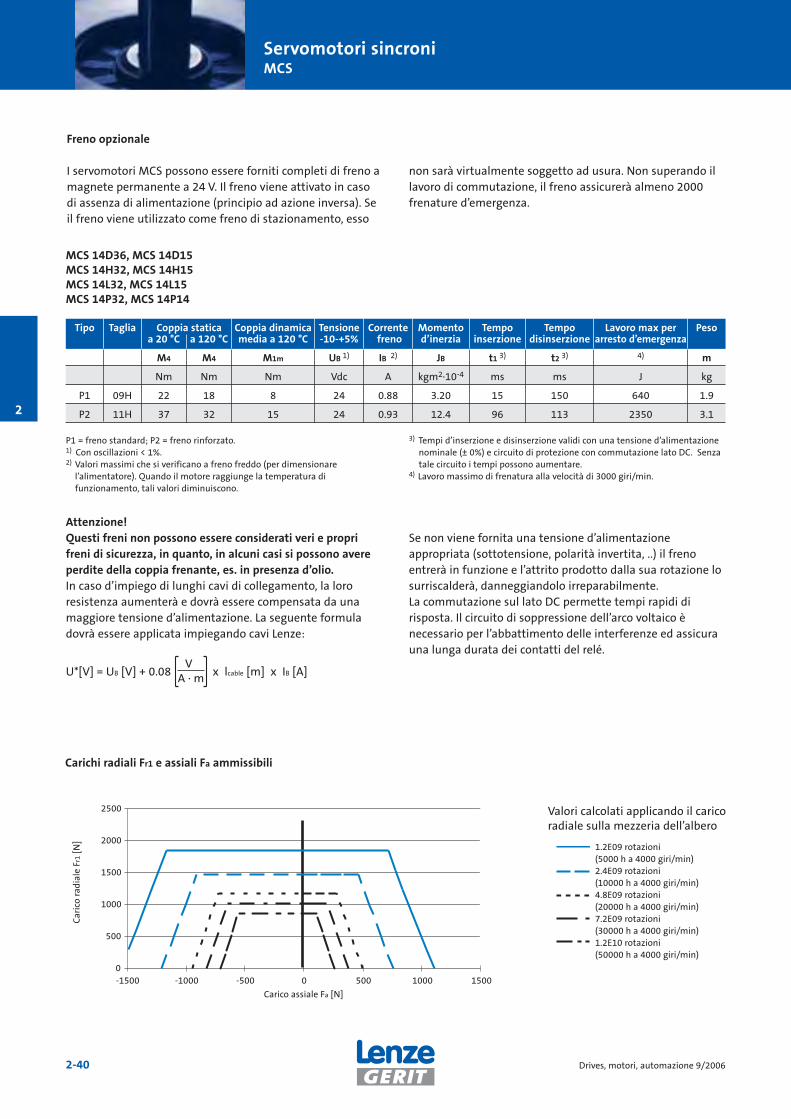
Servomotori sincroniMCS
2-40 Drives, motori, automazione 9/2006
2
Freno opzionale
I servomotori MCS possono essere forniti completi di freno amagnete permanente a 24 V. Il freno viene attivato in casodi assenza di alimentazione (principio ad azione inversa). Seil freno viene utilizzato come freno di stazionamento, esso
MCS 14D36, MCS 14D15MCS 14H32, MCS 14H15MCS 14L32, MCS 14L15MCS 14P32, MCS 14P14
non sarà virtualmente soggetto ad usura. Non superando illavoro di commutazione, il freno assicurerà almeno 2000frenature d’emergenza.
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
M4 M4 M1m UB 1) IB 2) JB t1 3) t2 3) 4) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1 09H 22 18 8 24 0.88 3.20 15 150 640 1.9
P2 11H 37 32 15 24 0.93 12.4 96 113 2350 3.1
0
500
1000
1500
2000
2500
-1500 -1000 -500 0 500 1000 1500
Carichi radiali Fr1 e assiali Fa ammissibili
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
Valori calcolati applicando il caricoradiale sulla mezzeria dell’albero
P1 = freno standard; P2 = freno rinforzato.1) Con oscillazioni < 1%.2) Valori massimi che si verificano a freno freddo (per dimensionare
l’alimentatore). Quando il motore raggiunge la temperatura difunzionamento, tali valori diminuiscono.
3) Tempi d’inserzione e disinserzione validi con una tensione d’alimentazionenominale (± 0%) e circuito di protezione con commutazione lato DC. Senzatale circuito i tempi possono aumentare.
4) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio.In caso d’impiego di lunghi cavi di collegamento, la lororesistenza aumenterà e dovrà essere compensata da unamaggiore tensione d’alimentazione. La seguente formuladovrà essere applicata impiegando cavi Lenze:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.
U*[V] = UB [V] + 0.08V
x lcable [m] x IB [A]A · m

Servomotori sincroniMCS
2-41Drives, motori, automazione 9/2006
2
Motore tipo Motore senza freno Motore con freno
i [mm] k [mm] l [mm] lx [mm] i [mm] k [mm] l [mm] lx [mm]
MCS 14D 40 201 251 301 40 229 279 329
MCS 14H 80 241 291 341 80 269 319 369
MCS 14L 120 281 331 381 120 309 359 409
MCS 14P 160 321 371 421 160 349 399 449
MCS 14: dimensioni
l Lunghezza motore completo di resolverlx Lunghezza motore completo di un encoder assoluto i Lunghezza imballo
Dimensioni connettore per MCS 14D, H, L15, P14
Dimensioni connettore per MCS 14L32, P32
Chiavetta 8 x 40 mm(secondo DIN 6885, foglio 1)

Servomotori sincroniMCS
2-42 Drives, motori, automazione 9/2006
2
1) Attenzione: limite Imax drive rispetto Imax motore.2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400
V tensione di rete.3) Con 9329 e 9330 a frequenze > 5 Hz, riducete sotto 5 Hz
MCS 19: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
Modulo asse 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330
Corrente continuativa [A] 1.5 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0
Corrente massima 0 Hz 1) 2) 3) [A] 2.3 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0
Corrente massima > 5 Hz 1) 2) 3) [A] 2.3 3.8 5.9 10.5 19.5 35.2 48.0 70.5 88.5 133.5
Motore tipo
MCS 19F14 MN [Nm] 22.0 27.0 27.0
M0 [Nm] 22.6 32.0 32.0
Mmax n = 0 [Nm] 33.0 58.2 68.3
Mmax [Nm] 33.0 58.2 86.0
MCS 19F30 MN [Nm] 19.5 21.0 21.0
M0 [Nm] 21.0 32.0 32.0
Mmax n = 0 [Nm] 29.3 35.3 47.2
Mmax [Nm] 29.3 51.6 68.3
MCS 19J14 MN [Nm] 40.0 40.0 40.0
M0 [Nm] 43.6 51.0 51.0
Mmax n = 0 [Nm] 63.1 74.7 97.9
Mmax [Nm] 63.1 106.2 129.0
MCS 19J30 MN [Nm] 29.0 29.0 29.0 29.0
M04) [Nm] 39.3 51.0 51.0 51.0
Mmax n = 0 [Nm] 36.8 50.2 72.5 79.6
Mmax [Nm] 55.3 73.9 104.7 127.7
MCS 19P14 MN [Nm] 46.4 51.0 51.0
M04) [Nm] 47.5 64.0 64.0
Mmax n = 0 [Nm] 69.5 83.2 110.5
Mmax [Nm] 69.5 120.6 157.9
MCS 19P30 MN [Nm] 32.0 32.0 32.0 32.0
M04) [Nm] 43.1 58.7 64.0 64.0
Mmax n = 0 [Nm] 39.6 53.9 78.8 86.9
Mmax [Nm] 59.4 80.5 116.1 143.7

Servomotori sincroniMCS
2-43Drives, motori, automazione 9/2006
2
1) Attenzione: limite Imax drive rispetto Imax motore.2) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C
e 400 V tensione di rete.4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
MCS 19: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore tipo
MCS 19F14 MN [Nm] 25.1 27.0
M0 [Nm] 25.9 32.0
Mmax n = 0 4) [Nm] 28.6 54.6
Mmax [Nm] 48.9 86.0
MCS 19F30 MN [Nm] 19.1 21.0 21.0
M0 [Nm] 20.5 27.5 32.0
Mmax n = 0 4) [Nm] 27.2 40.5 53.0
Mmax [Nm] 47.2 68.3 86.0
MCS 19J14 MN [Nm] 40.0 40.0
M0 [Nm] 42.6 51.0
Mmax n = 0 4) [Nm] 58.9 85.0
Mmax [Nm] 97.9 129.0
MCS 19J30 MN [Nm] 26.6 29.0
M0 [Nm] 28.4 33.4
Mmax n = 0 4) [Nm] 42.6 56.9
Mmax [Nm] 73.9 96.1
MCS 19P14 MN [Nm] 45.3 51.0 51.0
M0 [Nm] 46.4 62.2 64.0
Mmax n = 0 4) [Nm] 64.6 95.3 123.8
Mmax [Nm] 110.5 157.9 190.0
MCS 19P30 MN [Nm] 28.6 32.0
M0 [Nm] 31.2 36.7
Mmax n = 0 4) [Nm] 45.8 61.1
Mmax [Nm] 80.5 106.0

Servomotori sincroniMCS
2-44 Drives, motori, automazione 9/2006
2
U*[V] = UB [V] + 0.08V
x lcable [m] x IB [A]A · m
FrenoMotore tipo P1 P2
MCS 19Fòò ö
MCS 19Jòò ö
MCS 19Pòò ö
MCS 19F30, MCS 19F14
Freno opzionale
I servomotori MCS possono essere forniti completi di freno amagnete permanente a 24 V. Il freno viene attivato in casodi assenza di alimentazione (principio ad azione inversa). Seil freno viene utilizzato come freno di stazionamento, essonon sarà virtualmente soggetto ad usura. Non superando illavoro di commutazione, il freno assicurerà almeno 2000frenature d’emergenza.
Combinazione freno/motore MCS 19
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
M4 M4 M1m UB 1) IB 2) JB t1 3) t2 3) 4) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1 11H 37 32 15 24 0.93 12.4 96 113 2350 1.5
1) Con oscillazioni < 1%.. 2) Valori massimi che si verificano a freno freddo (per dimensionare
l’alimentatore). Quando il motore raggiunge la temperatura difunzionamento, tali valori diminuiscono.
3) Tempi d’inserzione e disinserzione validi con una tensione d’alimentazionenominale (± 0%) e circuito di protezione con commutazione lato DC. Senzatale circuito i tempi possono aumentare.
4) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio.In caso d’impiego di lunghi cavi di collegamento, la lororesistenza aumenterà e dovrà essere compensata da unamaggiore tensione d’alimentazione. La seguente formuladovrà essere applicata impiegando cavi Lenze:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
-2500 -2000 -1500 -1000 -500 0 500 1000 1500 2000
-1000
Carichi radiali Fr1 e assiali Fa ammissibili
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
Valori calcolati applicando il caricoradiale sulla mezzeria dell’albero
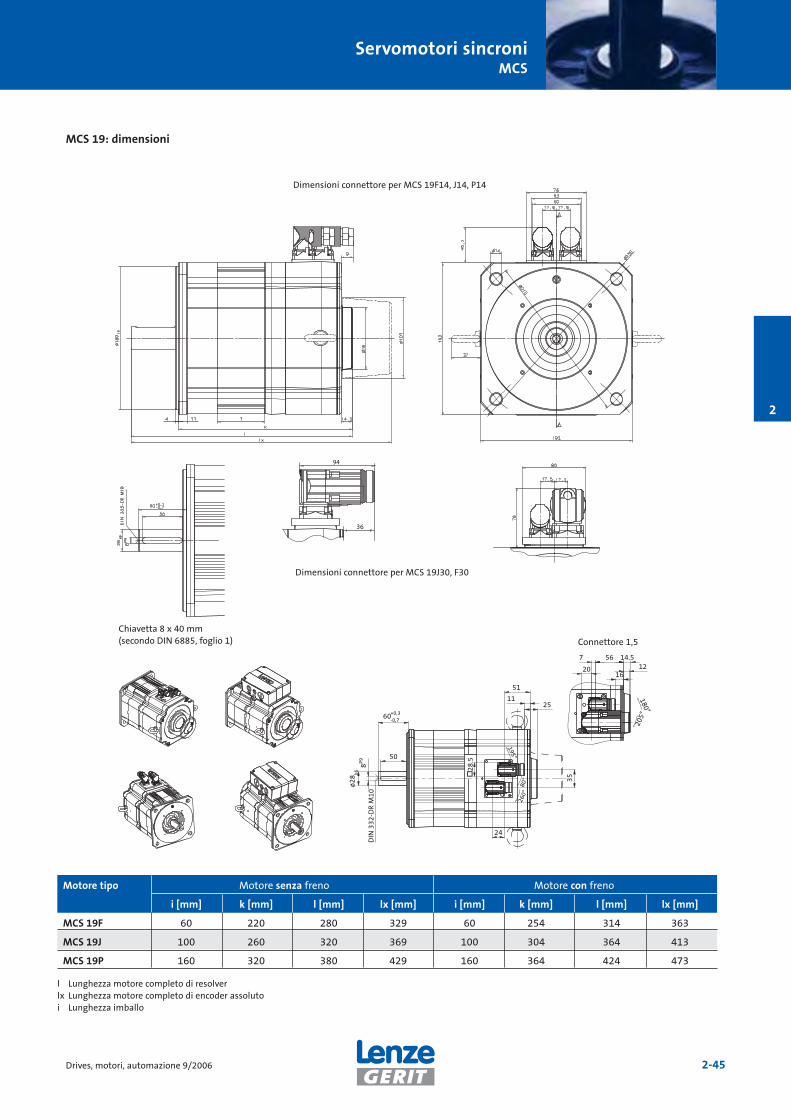
Servomotori sincroniMCS
2-45Drives, motori, automazione 9/2006
2
MCS 19: dimensioni
36
Dimensioni connettore per MCS 19F14, J14, P14
Dimensioni connettore per MCS 19J30, F30
Chiavetta 8 x 40 mm(secondo DIN 6885, foglio 1)
Motore tipo Motore senza freno Motore con freno
i [mm] k [mm] l [mm] lx [mm] i [mm] k [mm] l [mm] lx [mm]
MCS 19F 60 220 280 329 60 254 314 363
MCS 19J 100 260 320 369 100 304 364 413
MCS 19P 160 320 380 429 160 364 424 473
l Lunghezza motore completo di resolverlx Lunghezza motore completo di encoder assoluto i Lunghezza imballo
Connettore 1,5

Servomotori sincroniMCS
2-46 Drives, motori, automazione 9/2006
2
Terminale Collegamento
U Fase motore
V Fase motore
W Fase motore
PE Conduttore PE
Y1 Freno
Y2 Freno
Collegamenti
Collegamenti Morsettiera
Sezione cavi di potenza
Motore tipo 2.5 mm2 4 mm2 10 mm2
MCS 09 (tutti) ö ö*)
MCS 12 (tutti) ö ö*)
MCS 14D, H ö ö*)
MCS 14 L15 ö ö*)
MCS 14L32 ö
MCS 14P14 ö ö*)
MCS 14P32 ö
MCS 19F15 ö ö*)
MCS 19F30 ö
MCS 19J15 ö ö*)
MCS 19J30 ö
MCS 19P ö
*) Se non vengono utilizzati i capicorda
Cavi retroazione velocità/posizione e temperatura
Resolver Encoder assoluto (SRX50) Sezione cavoTerminale Collegamento Colore cavo Terminale Collegamento Colore cavo mm2
S1 Termostato S1 Termostato 0.14/0.21
S2 Termostato S2 Termostato 0.14/0.21
T1 KTY rilevatore temperatura (+) T1 KTY rilevatore temperatura (+) 0.14/0.21
T2 KTY rilevatore temperatura (-) T2 KTY rilevatore temperatura (-) 0.14/0.21
P1 PTC termistore P1 PTC termistore 0.14/0.21
P2 PTC termistore P2 PTC termistore 0.14/0.21
B1 +REF rosso/bianco B1 Alimentazione DC rosso 0.14/0.21
B2 -REF giallo /bianco B2 Earth GND blu 0.14/0.21
B3 – – B3 +COS rosa 0.14/0.21
B4 + COS rosso B4 -COS nero 0.14/0.21
B5 - COS nero B5 +SIN bianco 0.14/0.21
B6 + SIN giallo B6 -SIN marrone 0.14/0.21
B7 - SIN blu B7 Data+ RS485 grigio 0.14/0.21
– – – B8 Data- RS485 verde 0.14/0.21
76 mm
◊
◊
154 mm
128
mm
◊
◊
◊
◊

Servomotori asincroniMCA
2-47Drives, motori, automazione 9/2006
2
3
Questi servomotori a gabbia di scoiattolo si distimguono perla loro robustezza ed affidabilità. Sono particolarmente indi-cati in quelle applicazioni che richiedono grande precisione emedia dinamica.
Applicazioni tipichePallettizzatori, macchine tessili, macchine da stampa, estru-sori, mandrini per asportazione truciolo, carri ponte, cordatri-ci, nastratrici, ecc..
SilenziositàL'elevata silenziosità di questi servomotori è assicurata dalfunzionamento in abbinamento a servoinverter con frequen-za di chopper di 16 kHz. Anche la versione servomotoriduttore risulta particolarmentesilenziosa, sia per l'ottimizzazione della geometria delle den-tature, sia per l'impiego di carcasse in ghisa sferoidale carat-terizzate da un'elevata scabrosità interna.
Caratteristiche– Protezione standard IP54, IP65 a richiesta.– Conformità CE (direttive EMC e bassa tensione).– Approvazione UL (isolamento e avvolgimenti)
– Sensore di temperatura continuo.– Avvolgimenti rinforzati con isolamento in classe H.– Alberi d'uscita lisci o con chiavetta.– Versioni servoventilate opzionali– Esecuzioni con flangia B5 o B14.– Versione standard con resolver. A richiesta encoder incre-
mentale (5V TTL line drive), oppure encoder assoluto sin-cos(monogiro o multigiro).
– Versione autofrenante (opzionale) con freno ad azioneinversa a magneti permanenti.
– Connettori per semplificare i collegamenti.– Kit cavi-connettori a richiesta.– Le curve coppia/velocità relative al funzionamento in abbi-
namento a servoinverter sono scaricabili liberamente dalnostro sito, www.lenzegerit.it
Servomotori asincroni serie MCA2...55 Nm; 0,24...20,3 kW
Alte prestazioni

Servomotori asincroniMCA
2-48 Drives, motori, automazione 9/2006
2
MCA 10 e 13: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
Modulo asse 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330
Corrente continuativa [A] 1.5 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0
Corrente massima 0 Hz 1) [A] 2.3 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0
Corrente massima > 5 Hz 1) [A] 2.3 3.8 5.9 10.5 19.5 35.2 48.0 70.5 88.5 133.5
Motore senza ventilatore
MCA 10I40-...S00 MN [Nm] 2.0 2.0
M0 [Nm] 2.2 2.3
Mmax n = 0 [Nm] 4.4 7.3
Mmax [Nm] 4.4 7.3
MCA 13I41-...S00 MN [Nm] 4.0 4.0
M0 [Nm] 4.6 4.6
Mmax n = 0 [Nm] 12.6 19.5
Mmax [Nm] 12.6 19.5
Motore con ventilatore
MCA 13I34-...F10 MN [Nm] 6.3 6.3
M0 [Nm] 7.0 7.0
Mmax n = 0 [Nm] 13.0 25.0
Mmax [Nm] 13.0 25.0

Servomotori asincroniMCA
2-49Drives, motori, automazione 9/2006
2
3
MCA 10 e 13: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore senza ventilatore
MCA 10I40-...S00 MN [Nm] 2.0
M0 [Nm] 2.3
Mmax n = 0 4) [Nm] 5.6
Mmax [Nm] 8.1
MCA 13I41-...S00 MN [Nm] 3.0 4.0
M0 [Nm] 3.0 4.6
Mmax n = 0 4) [Nm] 4.3 11.0
Mmax [Nm] 9.4 18.2
Motore con ventilatore
MCA 13I34-...F10 MN [Nm] 6.3
M0 [Nm] 7.0
Mmax n = 0 4) [Nm] 10.7
Mmax [Nm] 20.8

Servomotori asincroniMCA
2-50 Drives, motori, automazione 9/2006
2
MCA 10 e MCA 13
0
200
400
600
800
1000
1200
-1000 -800 -600 -400 -200 0 200 400 600
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
Freno opzionale
I servomotori MCA possono essere forniti completi di freno amagnete permanente a 24/205 V. Il freno viene attivato incaso di assenza di alimentazione (principio ad azioneinversa). Se il freno viene utilizzato come freno di
stazionamento, esso non sarà virtualmente soggetto adusura. Non superando il lavoro di commutazione, il frenoassicurerà almeno 2000 frenature d’emergenza.
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
1) M4 M4 M1m UB 1) 2) IB 1) 3) JB t1 4) t2 4) 5) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1/P5 06E 3.25 2.50 1.20 24/205 0.5/0,06 0.38 5 7 350 0.85
P1/P5 07H 12.0 11.0 5.50 24/205 0.67/0,08 1.06 20 29 400 0.83
1) P1 = freno 24 V. P5 = freno 205 V non disponibile con certificazione UR.2) Con oscillazioni < 1%.3) Valori massimi a freno freddo (per dimensionare l’alimentatore). Quando il
motore raggiunge la temperatura di funzionamento, i valori diminuiscono.
4) Tempi d’inserzione e disinserzione validi con una tensione nominale (± 0%)e circuito di protezione con commutazione lato DC. Senza tale circuito itempi possono aumentare.
5) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio. In caso d’impiego di lunghi cavi di collegamento, occorrecompensare la loro resistenza con una maggiore tensioned’alimentazione. Impiegando cavi Lenze utilizzate la formula:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.
0
100
200
300
400
500
600
700
800
-600 -500 -400 -300 -200 -100 0 100 200
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
Carico assiale Fa [N]
Carichi radiali Fr1 e assiali Fa ammissibili sulla mezzeria dell’albero
MCA 10
MCA 13
U*[V] = UB [V] + 0.08V
x lcable [m] x IB [A]A · m
Car
ico
rad
iale
Fr1
[N]

2-51Drives, motori, automazione 9/2006
2
Servomotori asincroniMCA
3
B5A120/FF100
B14C105/FT85
B14C105/FT85
B5A120/FF100
Encoder/ventilatore SXXS00EXX S00TXX S00
Encoder/ventilatoreRS0 S00
DimensioniMCA 10
B5A160/FF13
B14C160/FT130
B14C160/FT130
B5A160/FF100
Encoder/ventilatore RS0
F10
RS0S00
MCA 13
Encoder/ventilatore
SXX F10
EXX F10
TXX F10
SXX S00
EXX S00
TXX S00
UN fN IN PN
[V] [Hz] [A] [W]
1 x 230 50/60 0.12 19
Ventilatore MCA 13

Servomotori asincroniMCA
2-52 Drives, motori, automazione 9/2006
2
MCA 14: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
Modulo asse 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330
Corrente continuativa [A] 1.5 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0
Corrente massima 0 Hz 1) [A] 2.3 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0
Corrente massima > 5 Hz 1) [A] 2.3 3.8 5.9 10.5 19.5 35.2 48.0 70.5 88.5 133.5
Motore senza ventilatore
MCA 14L20-...S00 MN [Nm] 6.7 6.7
M0 [Nm] 8.0 8.0
Mmax n = 0 [Nm] 15.1 29.3
Mmax [Nm] 15.1 29.3
MCA 14L41-...S00 MN [Nm] 5.4 5.4
M0 [Nm] 7.0 8.0
Mmax n = 0 [Nm] 13.2 26.0
Mmax [Nm] 13.2 26.0
Motore con ventilatore
MCA 14L16-...F10 MN [Nm] 12.0
M0 [Nm] 13.5
Mmax n = 0 [Nm] 29.6
Mmax [Nm] 29.6
MCA 14L35-...F10 MN [Nm] 10.8 10.8
M0 [Nm] 13.5 13.5
Mmax n = 0 [Nm] 29.3 47.0
Mmax [Nm] 29.3 53.8
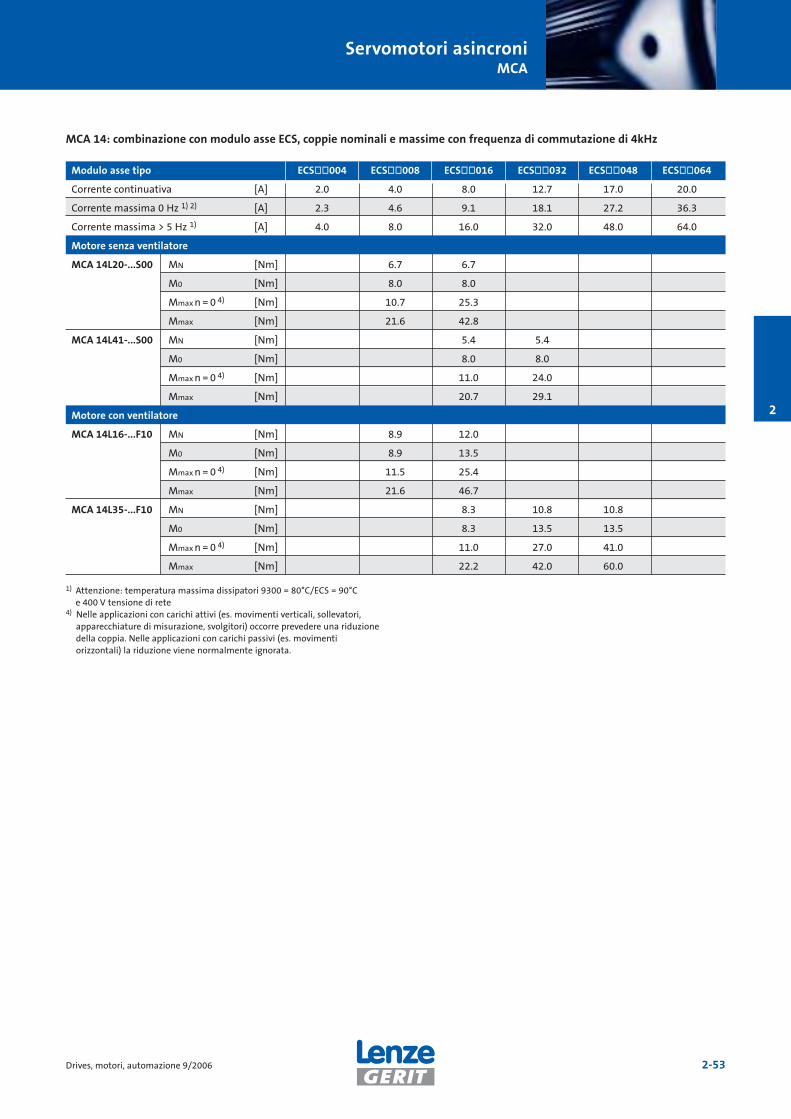
Servomotori asincroniMCA
2-53Drives, motori, automazione 9/2006
2
3
MCA 14: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore senza ventilatore
MCA 14L20-...S00 MN [Nm] 6.7 6.7
M0 [Nm] 8.0 8.0
Mmax n = 0 4) [Nm] 10.7 25.3
Mmax [Nm] 21.6 42.8
MCA 14L41-...S00 MN [Nm] 5.4 5.4
M0 [Nm] 8.0 8.0
Mmax n = 0 4) [Nm] 11.0 24.0
Mmax [Nm] 20.7 29.1
Motore con ventilatore
MCA 14L16-...F10 MN [Nm] 8.9 12.0
M0 [Nm] 8.9 13.5
Mmax n = 0 4) [Nm] 11.5 25.4
Mmax [Nm] 21.6 46.7
MCA 14L35-...F10 MN [Nm] 8.3 10.8 10.8
M0 [Nm] 8.3 13.5 13.5
Mmax n = 0 4) [Nm] 11.0 27.0 41.0
Mmax [Nm] 22.2 42.0 60.0

Servomotori asincroniMCA
2-54 Drives, motori, automazione 9/2006
2
0
200
400
600
800
1000
1200
1400
1600
1800
-1500 -1000 -500 0 500 1000
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
MCA 14
Freno opzionale
I servomotori MCA possono essere forniti completi di freno amagnete permanente a 24/205 V. Il freno viene attivato incaso di assenza di alimentazione (principio ad azioneinversa). Se il freno viene utilizzato come freno di
stazionamento, esso non sarà virtualmente soggetto adusura. Non superando il lavoro di commutazione, il frenoassicurerà almeno 2000 frenature d’emergenza.
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
1) M4 M4 M1m UB 2) IB 3) JB t1 4) t2 4) 5) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1 09E 15.0 12.0 6.0 24 0.75 3.60 13 30 700 1.45
P5 09E 15.0 12.0 6.0 205 0.09 3.60 13 30 700 1.45
1) P1 = freno 24 V, P5 = freno 205 V non disponibile con certificazione UR.
2) Con oscillazioni < 1%.. 3) Valori massimi a freno freddo (per dimensionare l’alimentatore). Quando il
motore raggiunge la temperatura di funzionamento, i valori diminuiscono.
4) Tempi d’inserzione e disinserzione validi con una tensione nominale (± 0%)e circuito di protezione con commutazione lato DC. Senza tale circuito itempi possono aumentare.
5) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio.In caso d’impiego di lunghi cavi di collegamento, occorrecompensare la loro resistenza con una maggiore tensioned’alimentazione. Impiegando cavi Lenze utilizzate la formula:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.U*[V] = UB [V] + 0.08
Vx lcable [m] x IB [A]A · m
Carichi radiali Fr1 e assiali Fa ammissibili sulla mezzeria dell’albero
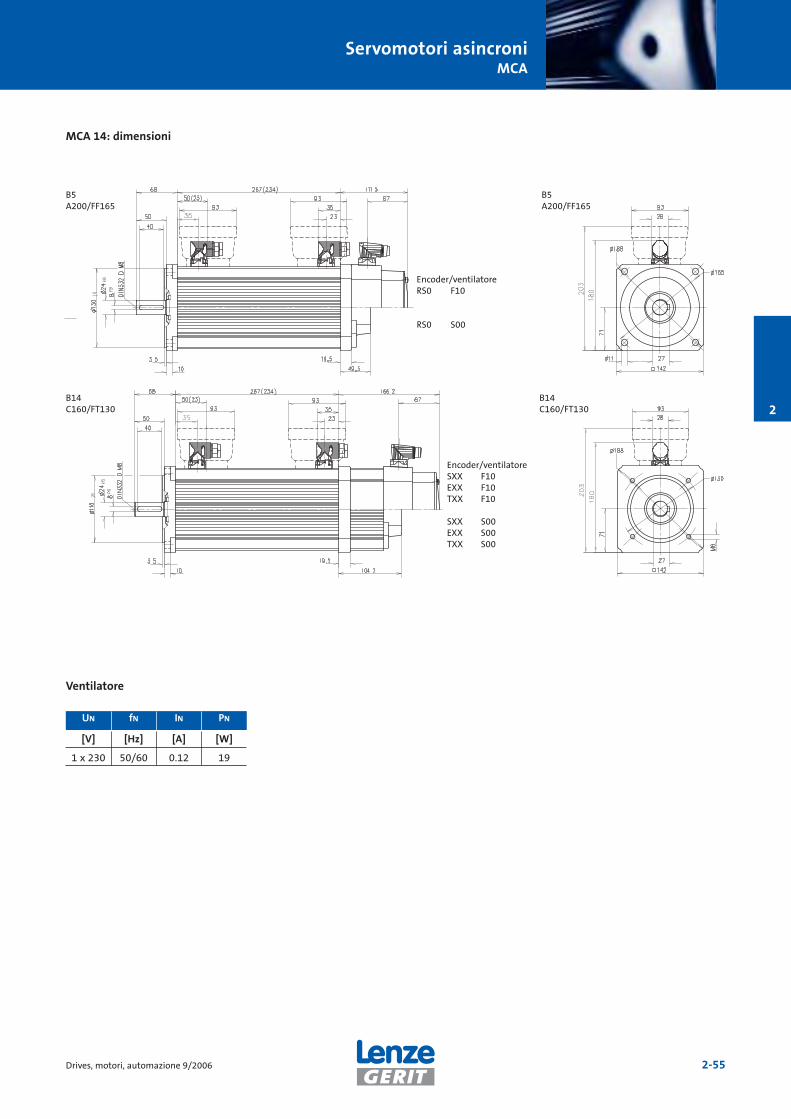
Servomotori asincroniMCA
2-55Drives, motori, automazione 9/2006
2
3
MCA 14: dimensioni
B5A200/FF165
B14C160/FT130
B5A200/FF165
Encoder/ventilatoreSXX F10EXX F10TXX F10
SXX S00EXX S00TXX S00
Encoder/ventilatoreRS0 F10
RS0 S00
B14C160/FT130
UN fN IN PN
[V] [Hz] [A] [W]
1 x 230 50/60 0.12 19
Ventilatore
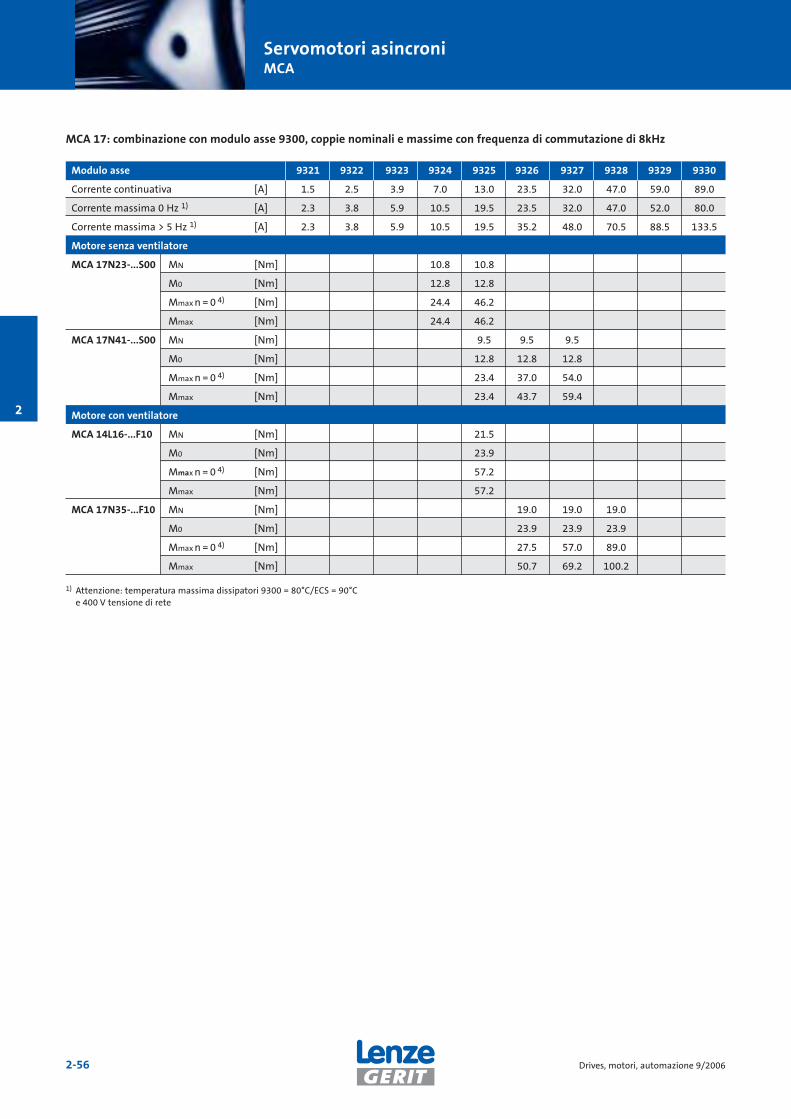
Servomotori asincroniMCA
2-56 Drives, motori, automazione 9/2006
2
MCA 17: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
Modulo asse 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330
Corrente continuativa [A] 1.5 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0
Corrente massima 0 Hz 1) [A] 2.3 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0
Corrente massima > 5 Hz 1) [A] 2.3 3.8 5.9 10.5 19.5 35.2 48.0 70.5 88.5 133.5
Motore senza ventilatore
MCA 17N23-...S00 MN [Nm] 10.8 10.8
M0 [Nm] 12.8 12.8
Mmax n = 0 4) [Nm] 24.4 46.2
Mmax [Nm] 24.4 46.2
MCA 17N41-...S00 MN [Nm] 9.5 9.5 9.5
M0 [Nm] 12.8 12.8 12.8
Mmax n = 0 4) [Nm] 23.4 37.0 54.0
Mmax [Nm] 23.4 43.7 59.4
Motore con ventilatore
MCA 14L16-...F10 MN [Nm] 21.5
M0 [Nm] 23.9
Mmax n = 0 4) [Nm] 57.2
Mmax [Nm] 57.2
MCA 17N35-...F10 MN [Nm] 19.0 19.0 19.0
M0 [Nm] 23.9 23.9 23.9
Mmax n = 0 4) [Nm] 27.5 57.0 89.0
Mmax [Nm] 50.7 69.2 100.2
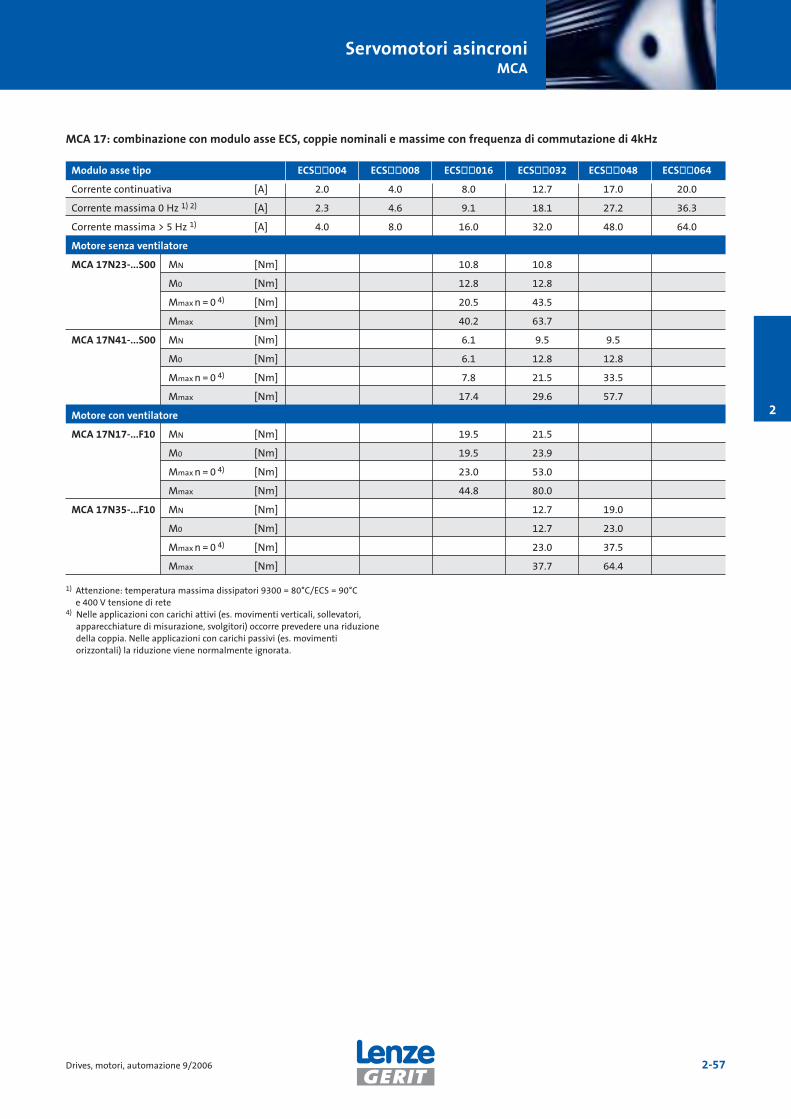
Servomotori asincroniMCA
2-57Drives, motori, automazione 9/2006
2
3
MCA 17: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore senza ventilatore
MCA 17N23-...S00 MN [Nm] 10.8 10.8
M0 [Nm] 12.8 12.8
Mmax n = 0 4) [Nm] 20.5 43.5
Mmax [Nm] 40.2 63.7
MCA 17N41-...S00 MN [Nm] 6.1 9.5 9.5
M0 [Nm] 6.1 12.8 12.8
Mmax n = 0 4) [Nm] 7.8 21.5 33.5
Mmax [Nm] 17.4 29.6 57.7
Motore con ventilatore
MCA 17N17-...F10 MN [Nm] 19.5 21.5
M0 [Nm] 19.5 23.9
Mmax n = 0 4) [Nm] 23.0 53.0
Mmax [Nm] 44.8 80.0
MCA 17N35-...F10 MN [Nm] 12.7 19.0
M0 [Nm] 12.7 23.0
Mmax n = 0 4) [Nm] 23.0 37.5
Mmax [Nm] 37.7 64.4

Servomotori asincroniMCA
2-58 Drives, motori, automazione 9/2006
2
0
200
400
600
800
1000
1200
1400
1600
1800
-2000 -1500 -1000 -500 0 500
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
MCA 17
Freno opzionale
I servomotori MCA possono essere forniti completi di freno amagnete permanente a 24/205 V. Il freno viene attivato incaso di assenza di alimentazione (principio ad azioneinversa). Se il freno viene utilizzato come freno di
stazionamento, esso non sarà virtualmente soggetto adusura. Non superando il lavoro di commutazione, il frenoassicurerà almeno 2000 frenature d’emergenza.
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
1) M4 M4 M1m UB 2) IB 3) JB t1 4) t2 4) 5) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1 09H 24.0 22.0 11.0 24 0.75 3.60 25 50 550 1.54
P5 09H 24.0 22.0 11.0 205 0.09 3.60 25 50 550 1.54
1) P1 = freno 24 V, P5 = freno 205 V non disponibile con certificazione UR.
2) Con oscillazioni < 1%.3) Valori massimi a freno freddo (per dimensionare l’alimentatore). Quando il
motore raggiunge la temperatura di funzionamento, i valori diminuiscono.
4) Tempi d’inserzione e disinserzione validi con una tensione nominale (± 0%)e circuito di protezione con commutazione lato DC. Senza tale circuito itempi possono aumentare.
5) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio.In caso d’impiego di lunghi cavi di collegamento, occorrecompensare la loro resistenza con una maggiore tensioned’alimentazione. Impiegando cavi Lenze utilizzate la formula:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.U*[V] = UB [V] + 0.08
Vx lcable [m] x IB [A]A · m
Carichi radiali Fr1 e assiali Fa ammissibili sulla mezzeria dell’albero

Servomotori asincroniMCA
2-59Drives, motori, automazione 9/2006
2
3
B5A200/FF165
B14C160/FT130
B5A200/FF165
Encoder/ventilatoreSXX F10EXX F10TXX F10
SXX S00EXX S00TXX S00
Encoder/ventilatoreRS0 F10
RS0 S00
B14C160/FT130
UN fN IN PN
[V] [Hz] [A] [W]
1 x 230 50/60 0.32 46
Ventilatore
MCA 17: dimensioni
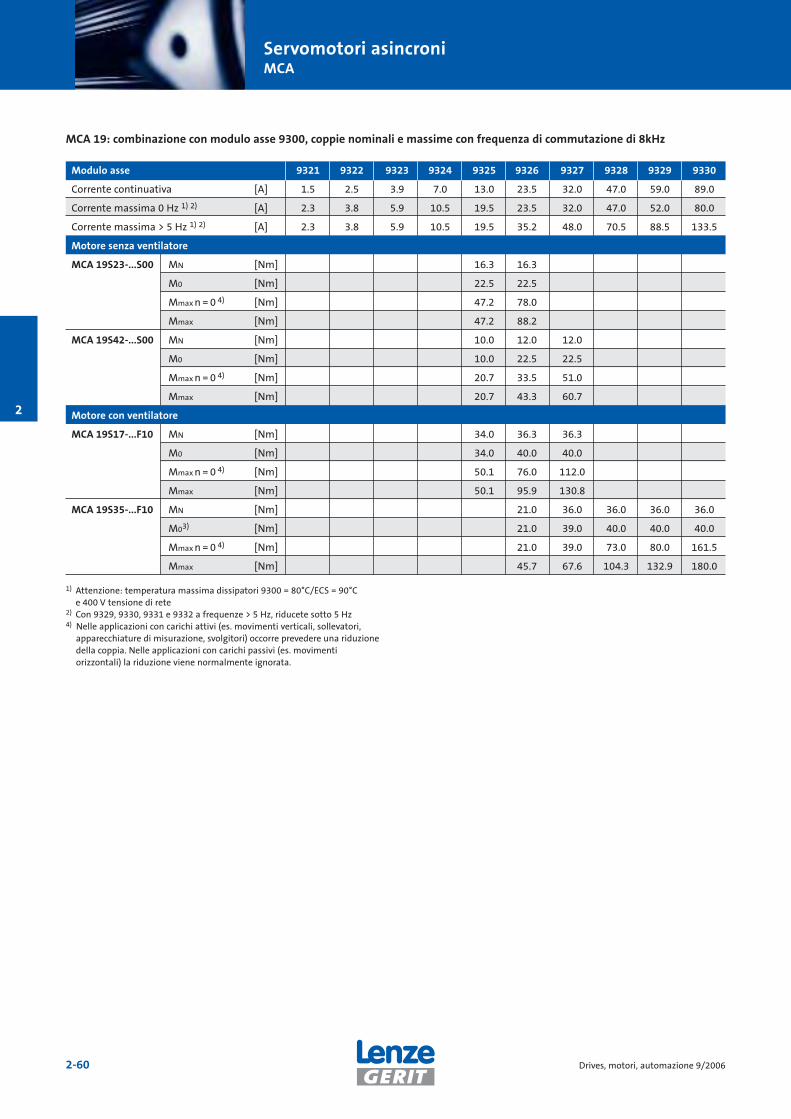
Servomotori asincroniMCA
2-60 Drives, motori, automazione 9/2006
2
MCA 19: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
2) Con 9329, 9330, 9331 e 9332 a frequenze > 5 Hz, riducete sotto 5 Hz4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330
Corrente continuativa [A] 1.5 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0
Corrente massima 0 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0
Corrente massima > 5 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 35.2 48.0 70.5 88.5 133.5
Motore senza ventilatore
MCA 19S23-...S00 MN [Nm] 16.3 16.3
M0 [Nm] 22.5 22.5
Mmax n = 0 4) [Nm] 47.2 78.0
Mmax [Nm] 47.2 88.2
MCA 19S42-...S00 MN [Nm] 10.0 12.0 12.0
M0 [Nm] 10.0 22.5 22.5
Mmax n = 0 4) [Nm] 20.7 33.5 51.0
Mmax [Nm] 20.7 43.3 60.7
Motore con ventilatore
MCA 19S17-...F10 MN [Nm] 34.0 36.3 36.3
M0 [Nm] 34.0 40.0 40.0
Mmax n = 0 4) [Nm] 50.1 76.0 112.0
Mmax [Nm] 50.1 95.9 130.8
MCA 19S35-...F10 MN [Nm] 21.0 36.0 36.0 36.0 36.0
M03) [Nm] 21.0 39.0 40.0 40.0 40.0
Mmax n = 0 4) [Nm] 21.0 39.0 73.0 80.0 161.5
Mmax [Nm] 45.7 67.6 104.3 132.9 180.0

Servomotori asincroniMCA
2-61Drives, motori, automazione 9/2006
2
3
MCA 19: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore senza ventilatore
MCA 19S23-...S00 MN [Nm] 15.1 16.3
M0 [Nm] 15.1 22.5
Mmax n = 0 4) [Nm] 18.7 43.5
Mmax [Nm] 38.5 67.9
MCA 19S42-...S00 MN [Nm] 9.8 12.0
M0 [Nm] 9.8 16.7
Mmax n = 0 4) [Nm] 18.4 31.9
Mmax [Nm] 29.9 58.2
Motore con ventilatore
MCA 19S17-...F10 MN [Nm] 28.3 36.3 36.3
M0 [Nm] 28.3 40.0 40.0
Mmax n = 0 4) [Nm] 46.5 72.0 98.0
Mmax [Nm] 75.4 130.8 158.9
MCA 19S35-...F10 MN [Nm]
M0 [Nm]
Mmax n = 0 4) [Nm]
Mmax [Nm]

Servomotori asincroniMCA
2-62 Drives, motori, automazione 9/2006
2
0
500
1000
1500
2000
2500
-3000 -2500 -2000 -1500 -1000 -500 0 500 1000 1500
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
MCA 19
Freno opzionale
I servomotori MCA possono essere forniti completi di freno amagnete permanente a 24/205 V. Il freno viene attivato incaso di assenza di alimentazione (principio ad azioneinversa). Se il freno viene utilizzato come freno di
stazionamento, esso non sarà virtualmente soggetto adusura. Non superando il lavoro di commutazione, il frenoassicurerà almeno 2000 frenature d’emergenza.
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
1) M4 M4 M1m UB 2) IB 3) JB t1 4) t2 4) 5) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1 11H 46.0 40.0 18.0 24 1.0 9.50 25 73 1.900 2.72
P5 11H 46.0 40.0 18.0 205 0.12 9.50 25 73 1.900 2.72
1) P1 = freno 24 V, P5 = freno 205 V non disponibile con certificazione UR.
2) Con oscillazioni < 1%.3) Valori massimi a freno freddo (per dimensionare l’alimentatore). Quando il
motore raggiunge la temperatura di funzionamento, i valori diminuiscono.
4) Tempi d’inserzione e disinserzione validi con una tensione nominale (± 0%)e circuito di protezione con commutazione lato DC. Senza tale circuito itempi possono aumentare.
5) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio.In caso d’impiego di lunghi cavi di collegamento, occorrecompensare la loro resistenza con una maggiore tensioned’alimentazione. Impiegando cavi Lenze utilizzate la formula:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.U*[V] = UB [V] + 0.08
Vx lcable [m] x IB [A]A · m
Carichi radiali Fr1 e assiali Fa ammissibili sulla mezzeria dell’albero
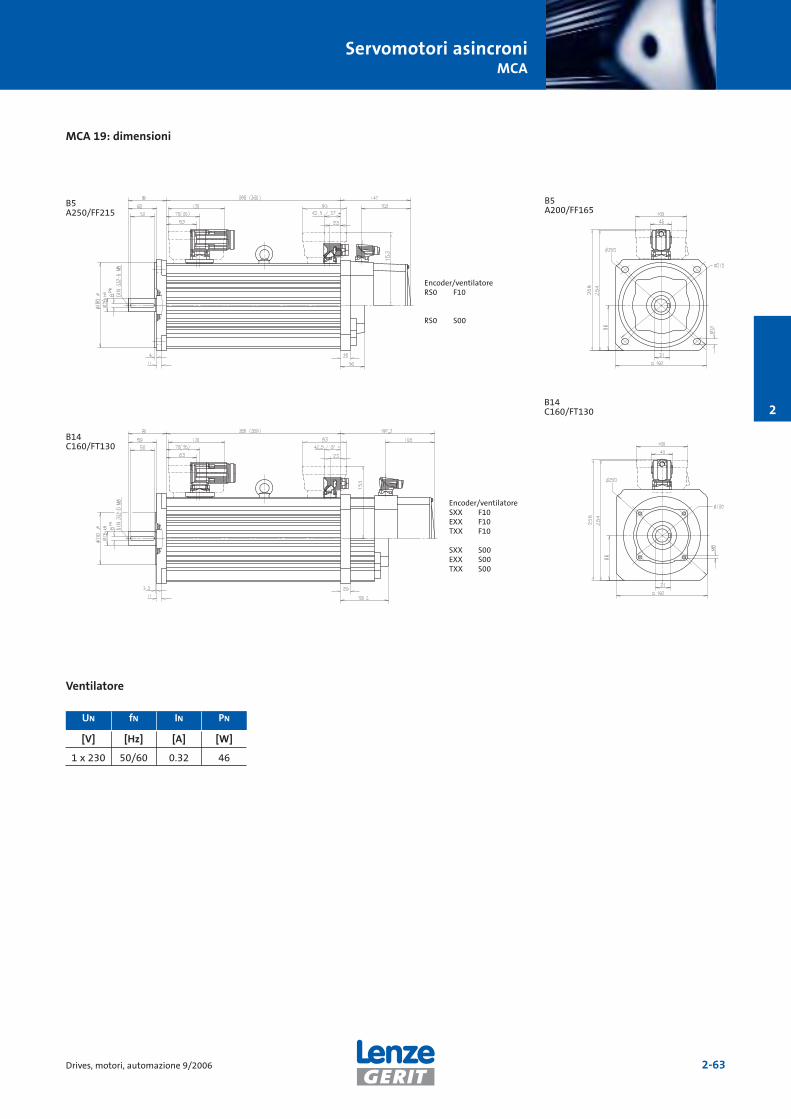
Servomotori asincroniMCA
2-63Drives, motori, automazione 9/2006
2
3
B5A250/FF215
B14C160/FT130
B5A200/FF165
Encoder/ventilatoreSXX F10EXX F10TXX F10
SXX S00EXX S00TXX S00
Encoder/ventilatoreRS0 F10
RS0 S00
B14C160/FT130
UN fN IN PN
[V] [Hz] [A] [W]
1 x 230 50/60 0.32 46
Ventilatore
MCA 19: dimensioni

Servomotori asincroniMCA
2-64 Drives, motori, automazione 9/2006
2
MCA 21: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
2) Con 9329, 9330, 9331 e 9332 a frequenze > 5 Hz, riducete sotto 5 Hz4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse 9322 9323 9324 9325 9326 9327 9328 9329 9330 9331
Corrente continuativa [A] 2.5 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0 110.0
Corrente massima 0 Hz 1) 2) [A] 3.8 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0 110.0
Corrente massima > 5 Hz 1) 2) [A] 2.3 3.8 5.9 10.5 19.5 35.3 48.0 70.5 88.5 133.5
Motore senza ventilatore
MCA 21X25-...S00 MN [Nm] 23.7 24.6 24.6
M0 [Nm] 23.7 39.0 39.0
Mmax n = 0 4) [Nm] 46.2 66.0 84.0
Mmax [Nm] 46.2 78.0 92.4
MCA 21X42-...S00 MN [Nm] 17.0 17.0 17.0 17.0
M03) [Nm] 24.0 39.0 39.0 39.0
Mmax n = 0 4) [Nm] 24.0 47.0 84.0 94.0
Mmax [Nm] 43.9 63.3 96.8 123.0
Motore con ventilatore
MCA 21X17-...F10 MN [Nm] 61.4 61.4 61.4 61.4
M03) [Nm] 65.5 75.0 75.0 75.0
Mmax n = 0 4) [Nm] 65.5 102.0 178.0 200.0
Mmax [Nm] 104.1 143.3 210.7 257.3
MCA 21X35-...F10 MN [Nm] 55.0 55.0 55.0 55.0
M03) [Nm] 68.0 75.0 75.0 75.0
Mmax n = 0 4) [Nm] 68.0 88.0 156.0 219.0
Mmax [Nm] 107.7 135.9 205.0 250.4

Servomotori asincroniMCA
2-65Drives, motori, automazione 9/2006
2
3
MCA 21: combinazione con modulo asse ECS, coppie nominali e massime con frequenza di commutazione di 4kHz
1) Attenzione: temperatura massima dissipatori 9300 = 80°C/ECS = 90°C e 400 V tensione di rete
4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse tipo ECSòò004 ECSòò008 ECSòò016 ECSòò032 ECSòò048 ECSòò064
Corrente continuativa [A] 2.0 4.0 8.0 12.7 17.0 20.0
Corrente massima 0 Hz 1) 2) [A] 2.3 4.6 9.1 18.1 27.2 36.3
Corrente massima > 5 Hz 1) [A] 4.0 8.0 16.0 32.0 48.0 64.0
Motore senza ventilatore
MCA 17N23-...S00 MN [Nm] 21.0 24.6
M0 [Nm] 21.0 39.0
Mmax n = 0 4) [Nm] 41.0 64.5
Mmax [Nm] 64.4 120.5
MCA 21X42-...S00 MN [Nm] 13.0 17.0
M0 [Nm] 13.0 17.0
Mmax n = 0 4) [Nm] 30.0 45.0
Mmax [Nm] 59.4 83.0
Motore con ventilatore
MCA 17N17-...F10 MN [Nm] 52.5
M0 [Nm] 52.5
Mmax n = 0 4) [Nm] 107.0
Mmax [Nm] 190.0
MCA 17N35-...F10 MN [Nm]
M0 [Nm]
Mmax n = 0 4) [Nm]
Mmax [Nm]
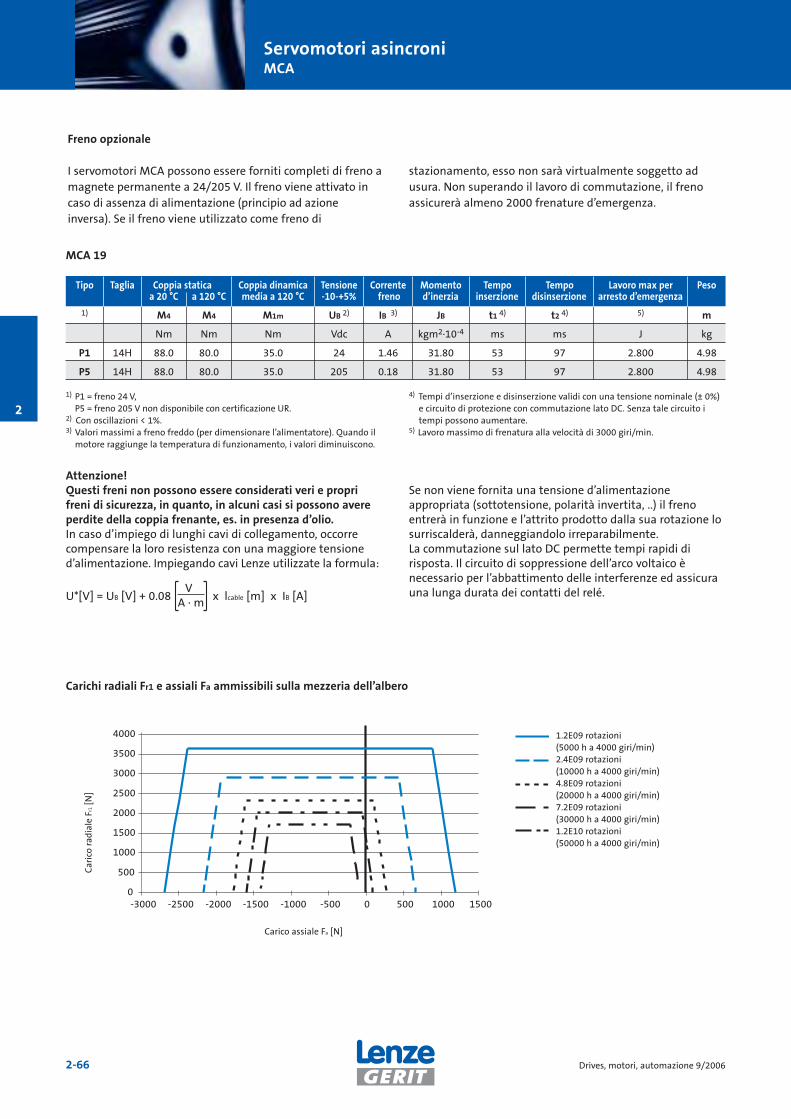
Servomotori asincroniMCA
2-66 Drives, motori, automazione 9/2006
2
0
500
1000
1500
2000
2500
3000
3500
4000
-3000 -2500 -2000 -1500 -1000 -500 0 500 1000 1500
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
MCA 19
Freno opzionale
I servomotori MCA possono essere forniti completi di freno amagnete permanente a 24/205 V. Il freno viene attivato incaso di assenza di alimentazione (principio ad azioneinversa). Se il freno viene utilizzato come freno di
stazionamento, esso non sarà virtualmente soggetto adusura. Non superando il lavoro di commutazione, il frenoassicurerà almeno 2000 frenature d’emergenza.
Tipo Taglia Coppia statica Coppia dinamica Tensione Corrente Momento Tempo Tempo Lavoro max per Pesoa 20 °C a 120 °C media a 120 °C -10-+5% freno d’inerzia inserzione disinserzione arresto d’emergenza
1) M4 M4 M1m UB 2) IB 3) JB t1 4) t2 4) 5) m
Nm Nm Nm Vdc A kgm2·10-4 ms ms J kg
P1 14H 88.0 80.0 35.0 24 1.46 31.80 53 97 2.800 4.98
P5 14H 88.0 80.0 35.0 205 0.18 31.80 53 97 2.800 4.98
1) P1 = freno 24 V, P5 = freno 205 V non disponibile con certificazione UR.
2) Con oscillazioni < 1%.3) Valori massimi a freno freddo (per dimensionare l’alimentatore). Quando il
motore raggiunge la temperatura di funzionamento, i valori diminuiscono.
4) Tempi d’inserzione e disinserzione validi con una tensione nominale (± 0%)e circuito di protezione con commutazione lato DC. Senza tale circuito itempi possono aumentare.
5) Lavoro massimo di frenatura alla velocità di 3000 giri/min.
Attenzione!Questi freni non possono essere considerati veri e proprifreni di sicurezza, in quanto, in alcuni casi si possono avereperdite della coppia frenante, es. in presenza d’olio.In caso d’impiego di lunghi cavi di collegamento, occorrecompensare la loro resistenza con una maggiore tensioned’alimentazione. Impiegando cavi Lenze utilizzate la formula:
Se non viene fornita una tensione d’alimentazioneappropriata (sottotensione, polarità invertita, ..) il frenoentrerà in funzione e l’attrito prodotto dalla sua rotazione losurriscalderà, danneggiandolo irreparabilmente. La commutazione sul lato DC permette tempi rapidi dirisposta. Il circuito di soppressione dell’arco voltaico ènecessario per l’abbattimento delle interferenze ed assicurauna lunga durata dei contatti del relé.U*[V] = UB [V] + 0.08
Vx lcable [m] x IB [A]A · m
Carichi radiali Fr1 e assiali Fa ammissibili sulla mezzeria dell’albero
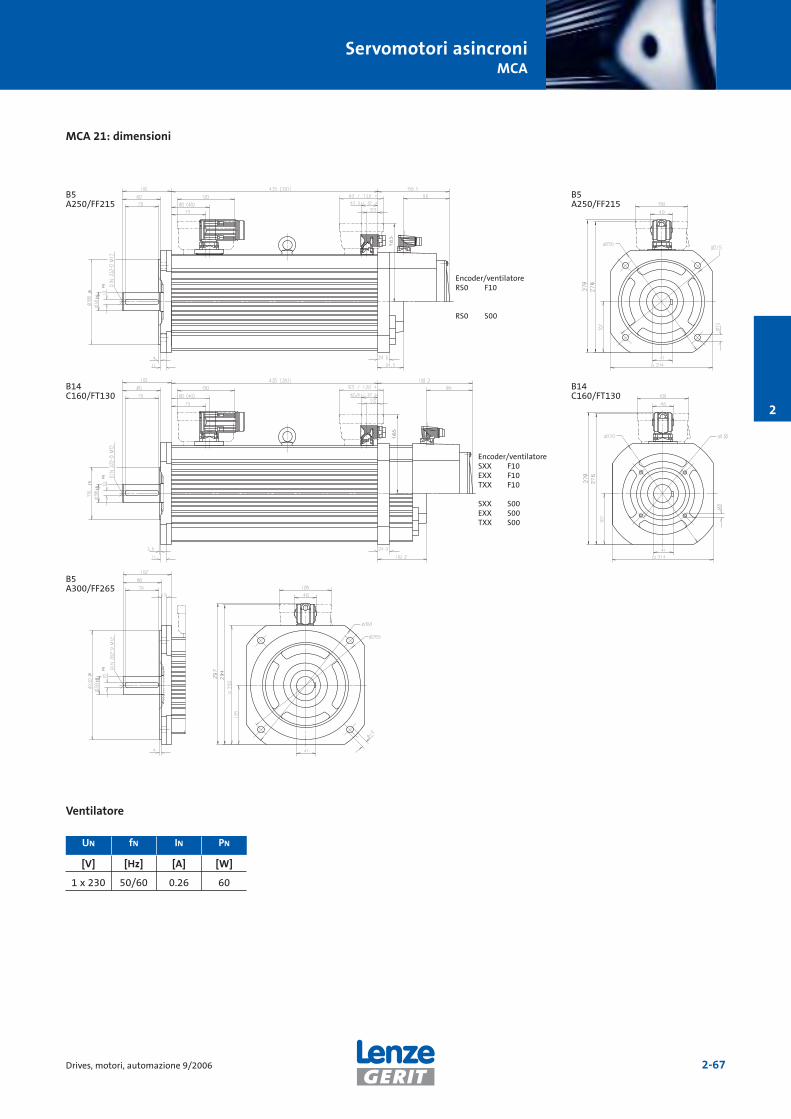
Servomotori asincroniMCA
2-67Drives, motori, automazione 9/2006
2
3
B5A250/FF215
B14C160/FT130
B5A250/FF215
Encoder/ventilatoreSXX F10EXX F10TXX F10
SXX S00EXX S00TXX S00
Encoder/ventilatoreRS0 F10
RS0 S00
B14C160/FT130
B5A300/FF265
UN fN IN PN
[V] [Hz] [A] [W]
1 x 230 50/60 0.26 60
Ventilatore
MCA 21: dimensioni

Servomotori asincroniMCA
2-68 Drives, motori, automazione 9/2006
2
Tipo Resolver Encoder assoluto SinCos Encoder incrementale Sezione
SRx 50 / SCx 70 Collegamento ITD 21 / 22 CDD 50cavo
Morsetto Collegamento Colore cavo Collegamento Colore cavoEndDat
Collegamento Colore cavo Colore cavo mm2
T1/P1/S1 Rilevatore temperatura KTY + 0.14 / 0.21
T2/P1/S1 Rilevatore temperatura KTY - 0.14 / 0.21
B1 + Rif rosso/bianco Alim. DC rosso +5V/+VCC ETS 1) Alim. DC rosso rosso 0.14 / 0.21
B2 - Rif giallo/bianco Terra GND blu GND Terra GND blu blu 0.14 / 0.21
B3 + cos rosa A/cos A verde bianco 0.14 / 0.21
B4 + cos rosso cos nero -A/-cos - A marrone marrone 0.14 / 0.21
B5 - cos nero + sin bianco B/sin B grigio rosa 0.14 / 0.21
B6 + sin giallo - sin marrone -B/-sin - B nero nero 0.14 / 0.21
B7 - sin blu Data +RS 485 grigio Data N rosa bianco/giallo 0.14 / 0.21
B8 Data –RS 485 verde - Data - N bianco bianco /blu 0.14 / 0.21
B10 0.14 / 0.21
B20 Impulso clock 0.14 / 0.21
B21 -Impulso clock 0.14 / 0.21
B22 Sensore UP 0.14 / 0.21
B23 Sensore 0V 0.14 / 0.21
B24 Schermatura 0.14 / 0.21
B25 0.14 / 0.21
U1 Ventilatore / L1 1.0 / 1.5
U2 Ventilatore / N 1.0 / 1.5
1) Solo motori completi di targhetta elettronica ETS con microchip.
Motore tipo Cavi morsetiera Retroazione
Pressacavo Morsetti Pressacavo
MCA 10 1x M20 x 1.5, 1x M16 x 1.5 0.08...2.5 mm2 1x M20 x 1.5, 1x M16 x 1.5
MCA 13 1x M20 x 1.5, 1x M16 x 1.5 0.08...2.5 mm2 1x M20 x 1.5, 1x M16 x 1.5
MCA 14 1x M20 x 1.5, 1x M16 x 1.5 0.08...2.5 mm2 1x M20 x 1.5, 1x M16 x 1.5
MCA 17 1x M20 x 1.5, 1x M16 x 1.5 0.08...2.5 mm2 1x M20 x 1.5, 1x M16 x 1.5
MCA 19 1x M32 x 1.5, 1x M25 x 1.5 0.02...10 mm2 1x M20 x 1.5, 1x M16 x 1.5
MCA 21 1x M32 x 1.5, 1x M25 x 1.5 0.02...10 mm2 1x M20 x 1.5, 1x M16 x 1.5
Collegamentii morsettiera
Pin no. Morsetto
Freno UB + 5 Y1
Freno UB - 6 Y2
Conduttore PE PE PE
Fase motore 1 U
Fase motore 2 V
Fase motore 3 WPressacavo
Specifiche per compatibilità EMC:˘ Cavi schermati˘ Pressacavi metallici EMC con collegamento schermatura
Riferimenti collegamento retroazione velocità/posizione e temperatura
Collegamenti

Servomotori asincroni a pacco lamellareMDFQA
2-69Drives, motori, automazione 9/2006
2
3
I servomotori asincroni MDFQA sono servoventilati e sonocaratterizzati da una grande compattezza.L’abbinamento a servoinverter e inverter li rende particolar-mente efficaci in quelle applicazioni in cui la dinamica non éun fattore critico e ove sia necessario un momento d’inerziaelevato per bilanciare l’inerzia riflessa dalla macchina.
VersatilitàLa modularità dei motori e degli accessori opzionali offronomassima versatilità in ogni applicazione.
SilenziositàL'elevata silenziosità di questi servomotori è assicurata dalfunzionamento in abbinamento ad inverter. Anche la versione servomotoriduttore risulta particolarmen-te silenziosa, sia per l'ottimizzazione della geometria delledentature, sia per l'impiego di carcasse in ghisa sferoidalecaratterizzate da un'elevata scabrosità interna.
Applicazioni tipicheEstrusori, carri ponte, macchine da stampa, taglierine, avvol-gitori/svolgitori, pompe, ventilatori, ecc..
Caratteristiche– Elevata densità di potenza – Ottima uniformità di rotazione– Protezione standard IP23, IP54 a richiesta– Isolamento in classe F– Esecuzioni B3 o B35– Conformità CE (direttive EMC e bassa tensione).– Approvazione UL (isolamento e avvolgimenti)– Sensore di temperatura continuo.– Alberi d'uscita lisci o con chiavetta.– Servoventilatore orientabile.– Scelta tra differenti sistemi di retroazione: resover, encoder
incrementale 5V TTL line driver, oppure encoder sin-cos.– Versione autofrenante (opzionale) con freno a molla.– Le curve coppia/velocità relative al funzionamento in abbi-
namento ai servoinverter serie 9300 sono scaricabili libe-ramente dal nostro sito, www.lenzegerit.it
ServomotoriduttoriQuesti motori possono essere forniti anche in versionemotoriduttore. Nella vasta gamma di riduttori potrete sce-gliere il modello più idoneo alla vostra applicazione. Sono disponibili riduttori: coassiali, ad assi paralleli, ortogo-nali, a vite senza fine oppure epicicloidali di alta precisione. Irapporti di riduzione disponibili, aumentando con passi dii=1,12, assicurano una velocità ottimale in uscita. L'appositocatalogo può essere scaricato dal nostro sito, www.lenzege-rit.it, oppure richiesto al nostro Ufficio Tecnico.
Servomotori asincroni serie MDFQA71...434 Nm; 10...95 kW
Massima compattezza

Servomotori asincroni a pacco lamellareMDFQA
2-70 Drives, motori, automazione 9/2006
2
MDFQA 100 e 112: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
1) Attenzione: coppie relative ad una temperatura massima dissipatori 9300 =80°C e 400 V tensione di rete; con temperature < 80 °C può essere richiestauna corrente massima superiore
2) Con 9329, 9330, 9331 e 9332 a frequenze > 5 Hz, riducete sotto 5 Hz.3) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse 9323 9324 9325 9326 9327 9328 9329 9330 9331 9332
Corrente continuativa [A] 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0 110.0 145.0
Corrente massima 0 Hz 1) [A] 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0 110.0 126.0
Corrente massima > 5 Hz [A] 3.8 5.9 10.5 19.5 35.3 48.0 70.5 88.5 133.5 217.5
Motore con ventilatore
MDFQA 100-22, 50 Y MN [Nm] 61.0 71.3 71.3 71.3
M0 2) [Nm] 61.0 76.0 76.0 76.0
Mmax n = 0 3) [Nm] 61.0 93.0 153.0 168.0
Mmax [Nm] 109.3 156.7 232.0 253.0
MDFQA 100-22, 100 Y MN [Nm] 66.2 66.2 66.2 66.2
M0 2) [Nm] 66.3 76.0 76.0 76.0
Mmax n = 0 3) [Nm] 66.3 72.0 129.0 190.0
Mmax [Nm] 112.5 146.4 227.0 257.0
MDFQA 112-22, 50 Y MN [Nm] 145.0 145.0 145.0
M0 2) [Nm] 156.0 156.0 156.0
Mmax n = 0 3) [Nm] 166.0 242.0 267.0
Mmax [Nm] 247.0 339.0 346.0
MDFQA 112-22, 50 Δ MN [Nm] 135.0 135.0 135.0
M0 2) [Nm] 146.0 156.0 156.0
Mmax n = 0 3) [Nm] 146.0 160.0 264.0
Mmax [Nm] 230.1 292.9 341.8
MDFQA 112-22, 100 Y MN [Nm] 124.0 130.0 130.0 130.0
M0 2) [Nm] 124.0 156.0 156.0 156.0
Mmax n = 0 3) [Nm] 124.0 135.0 204.0 287.0
Mmax [Nm] 180.5 228.0 342.0 378.0
MDFQA 112-22, 100 Δ MN [Nm] 125.0 125.0 125.0
M0 2) [Nm] 135.5 156.0 156.0
Mmax n = 0 3) [Nm] 122.0 171.0 200.0
Mmax [Nm] 216.0 273.0 355.0

Servomotori asincroni a pacco lamellareMDFQA
2-71Drives, motori, automazione 9/2006
2
3
0
500
1000
1500
2000
2500
3000
3500
4000
4500
-2000 -1500 -1000 -500 0 500 1000 1500
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
0
500
1000
1500
2000
2500
3000
3500
4000
4500
-4000 -3000 -2000 -1000 0 1000 2000 3000
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
MDFQA 100 E 112
Freno opzionale
I servomotori MDFQA possono essere forniti completi difreno a molla a 24 o 205 V DC. Il freno viene attivato in casodi assenza di alimentazione. Se il freno viene utilizzato come
freno di stazionamento, esso non sarà virtualmentesoggetto ad usura.
Tipo MDFQA MDFQA Freno Coppia Tensione Corrente Momento Tempo Tempo Lavoro max a Frequenza Peso100 112 BFK460 caratteristica -10-+5% freno d’inerzia inserzione disinserzione n=3000 giri/min interventi
M1m 1) UB 4) IB 3) JB t1 2) t2 2) QE Sh m
taglia Nm Vdc A kgm2·10-4 ms ms J 1/h kg
F1 ö 16N 80 24 2.29 15.0 92 220 36 27 13.5
F2 ö 18N 150 24 3.54 29.0 125 270 60 20 20.0
F5 ö 16N 80 205 0.27 15.0 92 220 36 27 13.5
F6 ö 18N 150 205 0.41 29.0 125 270 60 20 20.0
F1 ö 18N 150 24 3.54 29.0 125 270 60 20 21.5
F2 ö 20N 260 24 4.17 73.0 265 340 80 19 31.0
F5 ö 18N 150 205 0.41 29.0 125 270 60 20 21.5
F6 ö 20N 260 205 0.49 73.0 265 340 80 19 31.0
Carichi radiali Fr1 e assiali Fa ammissibili sulla mezzeria dell’albero
MDFQA 100
MDFQA 112
1) Coppe caratteristiche riferite ad una velocità relativa Dn = 100 giri/min.2) Tempi d’inserzione e disinserzione validi con una tensione nominale (± 0%)
e circuito di protezione con commutazione lato DC. Senza tale circuito itempi possono aumentare. Con una commutazione sul lato AC i tempid’inserzione aumentano di 6 volte. Il ritardo dipende dal tipo di
raddrizzatore, dal traferro e dalla corrente alla bobina.3) Valori massimi a freno freddo (per dimensionare l’alimentatore). Quando il
motore raggiunge la temperatura di funzionamento, i valori diminuiscono.4) Oscillazioni < 1% per i freni a 24 V
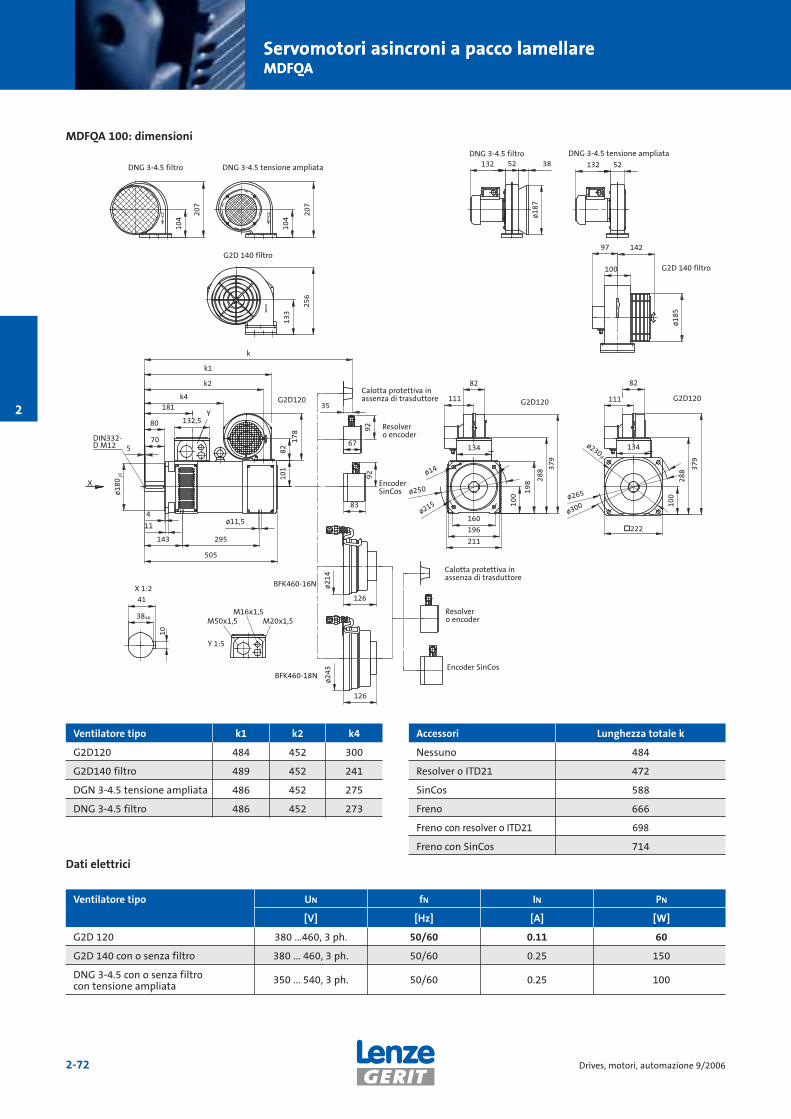
Servomotori asincroni a pacco lamellareMDFQA
2-72 Drives, motori, automazione 9/2006
2
Servomotori asincroni a pacco lamellareMDFQA
Ventilatore tipo k1 k2 k4
G2D120 484 452 300
G2D140 filtro 489 452 241
DGN 3-4.5 tensione ampliata 486 452 275
DNG 3-4.5 filtro 486 452 273
Accessori Lunghezza totale k
Nessuno 484
Resolver o ITD21 472
SinCos 588
Freno 666
Freno con resolver o ITD21 698
Freno con SinCos 714
DNG 3-4.5 filtro
G2D 140 filtro
DNG 3-4.5 tensione ampliata
DNG 3-4.5 filtro
G2D 140 filtro
DNG 3-4.5 tensione ampliata
Calotta protettiva inassenza di trasduttore
Resolvero encoder
Encoder SinCos
Resolvero encoder
Ventilatore tipo UN fN IN PN
[V] [Hz] [A] [W]
G2D 120 380 ...460, 3 ph. 50/60 0.11 60
G2D 140 con o senza filtro 380 ... 460, 3 ph. 50/60 0.25 150
DNG 3-4.5 con o senza filtro 350 ... 540, 3 ph. 50/60 0.25 100con tensione ampliata
Dati elettrici
MDFQA 100: dimensioni
Calotta protettiva inassenza di trasduttore
EncoderSinCos

Servomotori asincroni a pacco lamellareMDFQA
2-73Drives, motori, automazione 9/2006
3
Ventilatore tipo k1 k2 k4
G2D160 601.5 554.5 353.5
G2D160 filtro 601.5 554.5 353.5
DGN 5-12.5 tensione ampliata 590 554.5 323
DGN 5-12.5 filtro 590 554.5 312.5
Accessori Lunghezza totale k
Nessuno 660
Resolver o ITD21 692
SinCos 708
Freno 786
Freno con resolver o ITD21 818
Freno con SinCos 834
Ventilatore tipo UN fN IN PN
[V] [Hz] [A] [W]
G2D 160 380 ...460, 3 ph. 50/60 0.5 320
DNG 5 -12.5 con o senza filtro 350 ... 540, 3 ph. 50/60 0.75 390con tensione ampliata
Dati elettrici
MDFQA 112: dimensioni
DNG 5-12.5 filtro
G2D 160 filtro
DNG 5-12.5 tensione ampliata
DNG 5-12.5 filtroDNG 5-12.5 tensioneampliata
Calotta protettiva inassenza di trasduttore
Resolvero encoder
Encoder SinCos
Resolvero encoder
Encoder SinCos
Calotta protettiva inassenza di trasduttore
G2D 160 filtro
2

Servomotori asincroni a pacco lamellareMDFQA
2-74 Drives, motori, automazione 9/2006
2
MDFQA 132: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
1) Attenzione: coppie relative ad una temperatura massima dissipatori 9300 =80°C e 400 V tensione di rete; con temperature < 80 °C può essere richiestauna corrente massima superiore
2) Con 9329, 9330, 9331 e 9332 a frequenze > 5 Hz, riducete sotto 5 Hz.3) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse 9323 9324 9325 9326 9327 9328 9329 9330 9331 9332
Corrente continuativa [A] 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0 110.0 145.0
Corrente massima 0 Hz 1) [A] 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0 110.0 126.0
Corrente massima > 5 Hz [A] 3.8 5.9 10.5 19.5 35.3 48.0 70.5 88.5 133.5 217.5
Motore con ventilatore
MDFQA 132-32, 36 Y MN [Nm] 296.0 296.0 296.0
M0 2) [Nm] 303.0 325.0 325.0
Mmax n = 0 3) [Nm] 303.0 333.0 615.0
Mmax [Nm] 482.0 612.0 751.0
MDFQA 132-32, 36 Δ MN [Nm] 288.0 288.0
M0 2) [Nm] 319.0 325.0
Mmax n = 0 3) [Nm] 300.0 440.0
Mmax [Nm] 552.0 671.0
MDFQA 132-32, 76 Y MN [Nm] 282.0 282.0 282.0
M0 2) [Nm] 284.0 325.0 325.0
Mmax n = 0 3) [Nm] 258.0 327.0 397.0
Mmax [Nm] 424.0 512.0 663.0
MDFQA 132-32, 76 Δ MN [Nm] 203.0 257.0
M0 2) [Nm] 203.0 257.0
Mmax n = 0 3) [Nm] 203.0 220.0
Mmax [Nm] 344.0 458.0
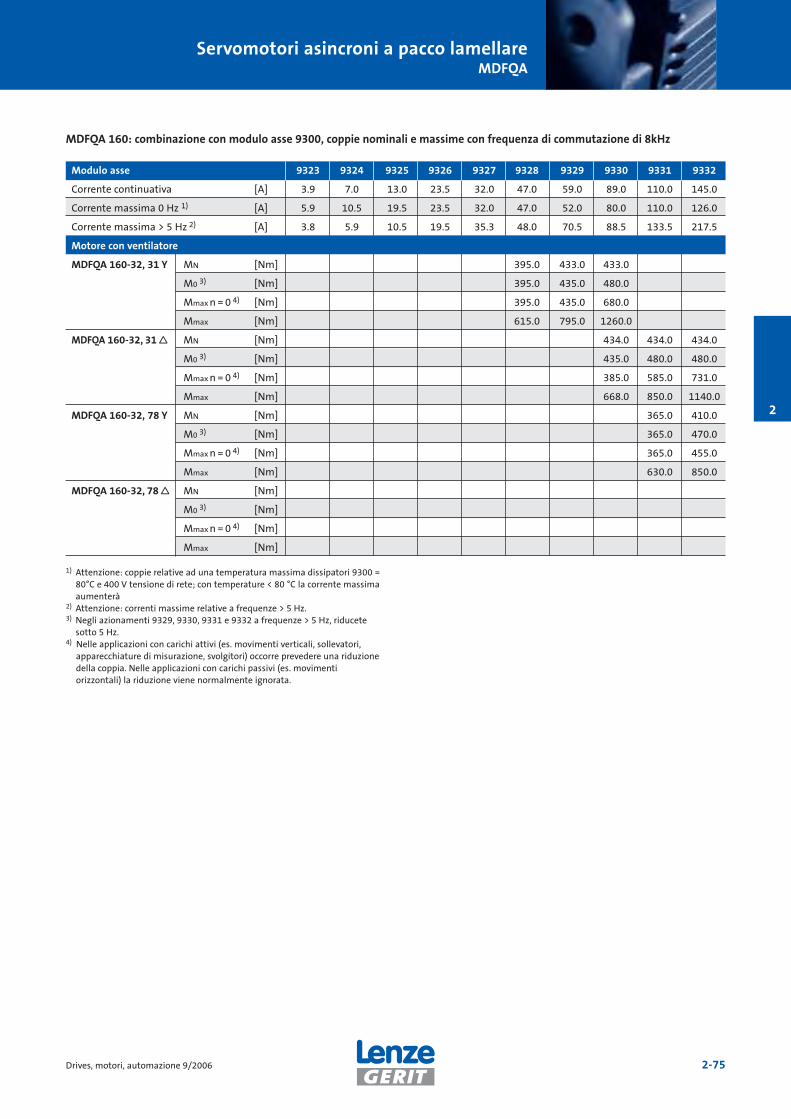
Servomotori asincroni a pacco lamellareMDFQA
2-75Drives, motori, automazione 9/2006
2
3
MDFQA 160: combinazione con modulo asse 9300, coppie nominali e massime con frequenza di commutazione di 8kHz
1) Attenzione: coppie relative ad una temperatura massima dissipatori 9300 =80°C e 400 V tensione di rete; con temperature < 80 °C la corrente massimaaumenterà
2) Attenzione: correnti massime relative a frequenze > 5 Hz.3) Negli azionamenti 9329, 9330, 9331 e 9332 a frequenze > 5 Hz, riducete
sotto 5 Hz.4) Nelle applicazioni con carichi attivi (es. movimenti verticali, sollevatori,
apparecchiature di misurazione, svolgitori) occorre prevedere una riduzionedella coppia. Nelle applicazioni con carichi passivi (es. movimentiorizzontali) la riduzione viene normalmente ignorata.
Modulo asse 9323 9324 9325 9326 9327 9328 9329 9330 9331 9332
Corrente continuativa [A] 3.9 7.0 13.0 23.5 32.0 47.0 59.0 89.0 110.0 145.0
Corrente massima 0 Hz 1) [A] 5.9 10.5 19.5 23.5 32.0 47.0 52.0 80.0 110.0 126.0
Corrente massima > 5 Hz 2) [A] 3.8 5.9 10.5 19.5 35.3 48.0 70.5 88.5 133.5 217.5
Motore con ventilatore
MDFQA 160-32, 31 Y MN [Nm] 395.0 433.0 433.0
M0 3) [Nm] 395.0 435.0 480.0
Mmax n = 0 4) [Nm] 395.0 435.0 680.0
Mmax [Nm] 615.0 795.0 1260.0
MDFQA 160-32, 31 Δ MN [Nm] 434.0 434.0 434.0
M0 3) [Nm] 435.0 480.0 480.0
Mmax n = 0 4) [Nm] 385.0 585.0 731.0
Mmax [Nm] 668.0 850.0 1140.0
MDFQA 160-32, 78 Y MN [Nm] 365.0 410.0
M0 3) [Nm] 365.0 470.0
Mmax n = 0 4) [Nm] 365.0 455.0
Mmax [Nm] 630.0 850.0
MDFQA 160-32, 78 Δ MN [Nm]
M0 3) [Nm]
Mmax n = 0 4) [Nm]
Mmax [Nm]

Servomotori asincroni a pacco lamellareMDFQA
2-76 Drives, motori, automazione 9/2006
2
0
1000
2000
3000
4000
5000
6000
7000
8000
-4000 -3000 -2000 -1000 0 1000 2000 3000
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
0
1000
2000
3000
4000
5000
6000
-5000 -4000 -3000 -2000 -1000 0 1000 2000 3000 4000
Carico assiale Fa [N]
Car
ico
rad
iale
Fr1
[N]
1.2E09 rotazioni(5000 h a 4000 giri/min)2.4E09 rotazioni(10000 h a 4000 giri/min)4.8E09 rotazioni(20000 h a 4000 giri/min)7.2E09 rotazioni(30000 h a 4000 giri/min)1.2E10 rotazioni(50000 h a 4000 giri/min)
MDFQA 132 e 160
Freno opzionale
I servomotori MDFQA possono essere forniti completi difreno a molla a 24 o 205 V DC. Il freno viene attivato in casodi assenza di alimentazione. Se il freno viene utilizzato
come freno di stazionamento, esso non sarà virtualmentesoggetto ad usura.
Tipo MDFQA MDFQA Freno Coppia Tensione Corrente Momento Tempo Tempo Lavoro max a Frequenza Peso132 160 BFK460 caratteristica -10-+5% freno d’inerzia inserzione disinserzione n=3000 giri/min interventi
M1m 1) UB 4) IB 3) JB t1 2) t2 2) QE Sh m
taglia Nm Vdc A kgm2·10-4 ms ms J 1/h kg
F1 ö 20N 260 24 4.17 73.0 265 340 80 19 32.50
F2 ö 25N 400 24 4.58 200.0 370 390 120 15 46.00
F5 ö 20N 260 205 0.49 73.0 265 340 80 19 32.50
F6 ö 25N 400 205 0.54 200.0 370 390 120 15 46.00
F1 ö 20E 260 24 4.17 73.0 265 340 80 19 25.40
F2 ö 25E 400 24 4.58 200.0 370 390 120 15 37.20
F5 ö 20E 260 205 0.49 73.0 265 340 80 19 25.40
F6 ö 25E 400 205 0.54 200.0 370 390 120 15 37.20
1) Coppe caratteristiche riferite ad una velocità relativa Dn = 100 giri/min.2) Tempi d’inserzione e disinserzione validi con una tensione nominale (± 0%)
e circuito di protezione con commutazione lato DC. Senza tale circuito itempi possono aumentare. Con una commutazione sul lato AC i tempid’inserzione aumentano di 6 volte. Il ritardo dipende dal tipo di
raddrizzatore, dal traferro e dalla corrente alla bobina.3) Valori massimi a freno freddo (per dimensionare l’alimentatore). Quando il
motore raggiunge la temperatura di funzionamento, i valori diminuiscono.4) Oscillazioni < 1% per i freni a 24 V
Carichi radiali Fr1 e assiali Fa ammissibili sulla mezzeria dell’albero
MDFQA 132
MDFQA 160
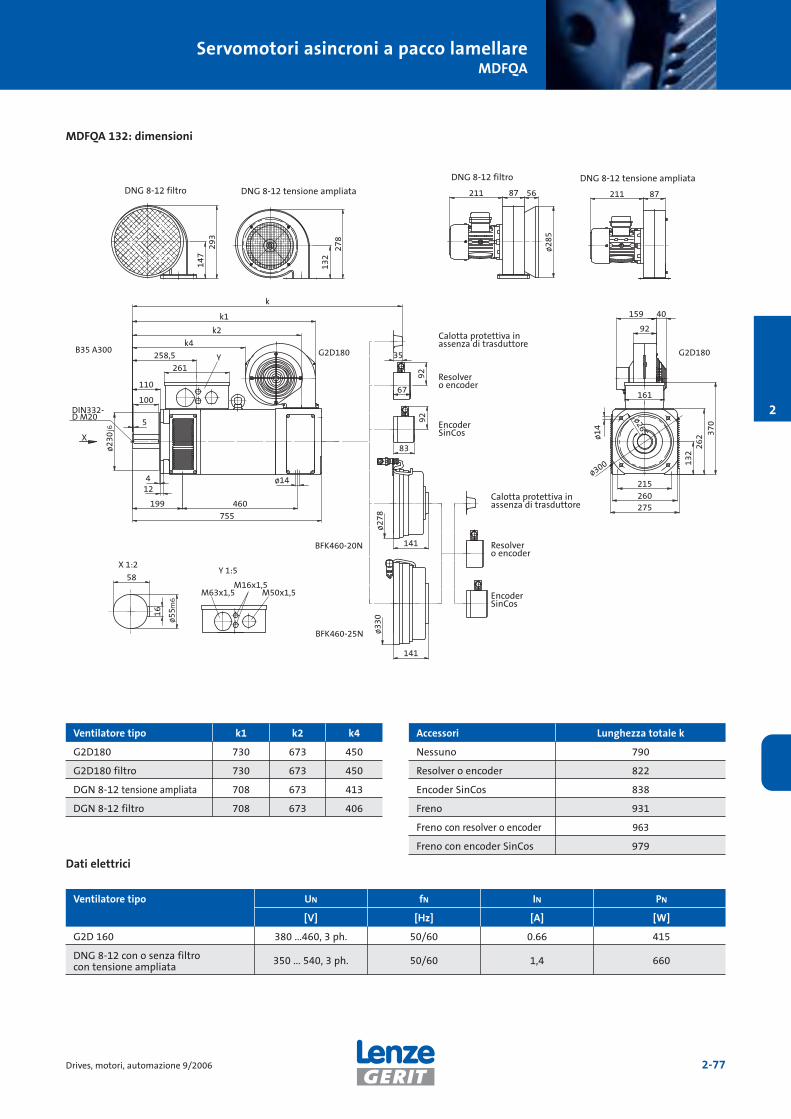
Servomotori asincroni a pacco lamellareMDFQA
2-77Drives, motori, automazione 9/2006
2
3
DNG 8-12 filtro DNG 8-12 tensione ampliataDNG 8-12 filtro DNG 8-12 tensione ampliata
Ventilatore tipo k1 k2 k4
G2D180 730 673 450
G2D180 filtro 730 673 450
DGN 8-12 tensione ampliata 708 673 413
DGN 8-12 filtro 708 673 406
Accessori Lunghezza totale k
Nessuno 790
Resolver o encoder 822
Encoder SinCos 838
Freno 931
Freno con resolver o encoder 963
Freno con encoder SinCos 979
Ventilatore tipo UN fN IN PN
[V] [Hz] [A] [W]
G2D 160 380 ...460, 3 ph. 50/60 0.66 415
DNG 8-12 con o senza filtro 350 ... 540, 3 ph. 50/60 1,4 660con tensione ampliata
Dati elettrici
MDFQA 132: dimensioni
Resolvero encoder
EncoderSinCos
Calotta protettiva inassenza di trasduttore
Resolvero encoder
EncoderSinCos
Calotta protettiva inassenza di trasduttore

Servomotori asincroni a pacco lamellareMDFQA
2-78 Drives, motori, automazione 9/2006
2
AccessoriFreno Trasduttore
BFK 458-20 Resolver, ITD21, SinCos
MDFQA 160: dimensioni
Ventilatore tipo UN fN IN PN
[V] [Hz] [A] [W]
DNG 6-35 con o senza filtro 350 ... 540, 3 ph. 50/60 1,4 650con tensione ampliata
Dati elettrici
Connettoreencoder
Configurazione Aventilatore con filtro
Configurazione Aventilatore senzafiltro
Configurazione Bventilatore con filtro
Configurazione Bventilatore senzafiltro
Ventilatore tipo Protezione (con o senza filtro)
DNG 6-35 IP23
Connettorefreno

Servomotori asincroni a pacco lamellareMDFQA
2-79Drives, motori, automazione 9/2006
2
3
Morsetti
Motore tipo Collegamento potenza Collegamento ventilatore
MDFQ 1001x M40 x 1.5 + 1x M20 x 1.5 + M61x M16 x 1.5
MDFQ 1121x M50 x 1.5 + 1x M20 x 1.5 + M6 1x M16 x 1.51x M16 x 1.5
MDFQ 1321x M63 x 1.5 + 1x M50 x 1.5 + M122x M16 x 1.5
MDFQ 1602x M63 x 1.5 + M12 M20 x 1.51x M16 x 1.5
Pressacavo
T2
T1
S2
S1
(W2) (U2) (V2)
(U1) (V1) (W1)
4 5 6
1 2 3
L1 L2 L3
(W2) (U2) (V2)
(U1) (V1) (W1)
4 5 6
1 2 3
L1 L2 L3
MDFQA 100
A stella
A triangolo
*Su motori con retroazione, KTY è collegato all’encoder.
(U1) (V1) (W1)
4 5 6
1 2 3
L1 L2 L3
MDFQA 112/132/160
Collegamenti
Nei servomotori MDFQA i collegamenti di potenza e delventilatore impiegano due morsettiere separate.
I collegamenti per l’eventuale retroazione e/o frenoimpiegano due connettori separati.
S1
S2
T1
T2
Morsetto Collegamento
U Fase motore
V Fase motore
W Fase motore
PE Conduttore PE
S1 Termostato al morsetto T1 del 9300
S2 Termostato al morsetto T2 del 9300
T1 Rilevatore temperatura* KTY, collegato via encoder
T2 Rilevatore temperatura* KTY, collegato via encoder
Morsettiera collegamento di potenza
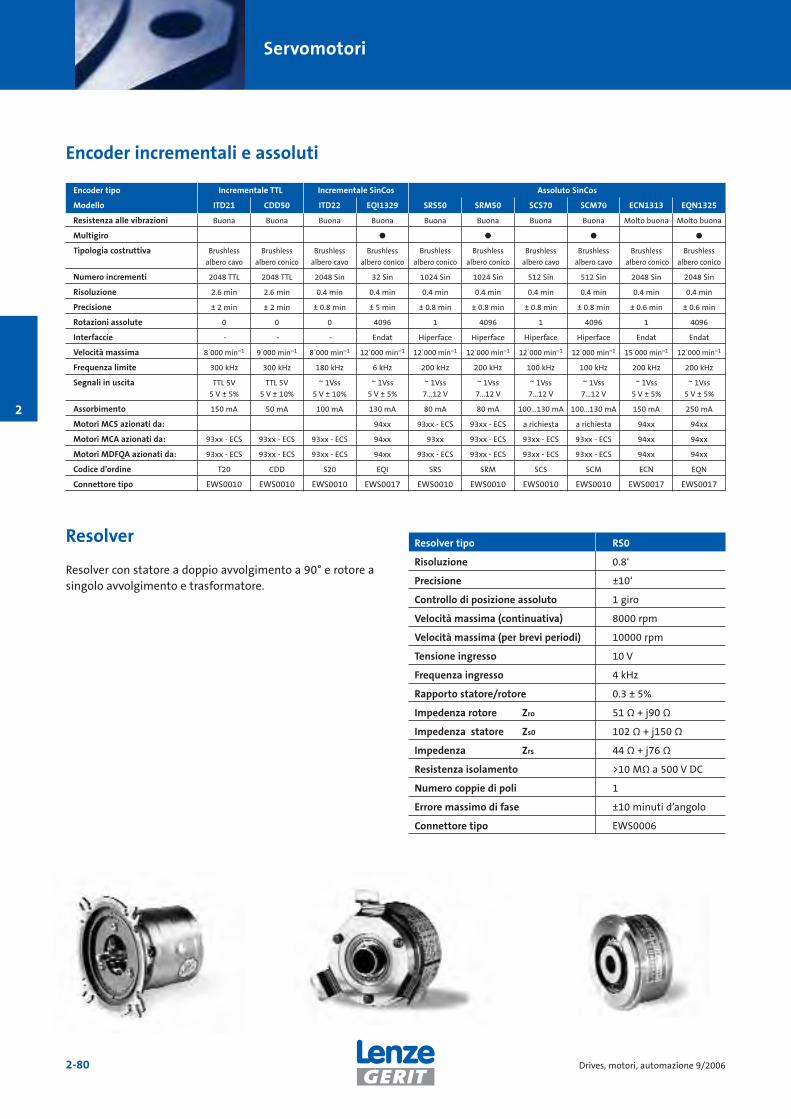
Servomotori
2-80 Drives, motori, automazione 9/2006
2
Resolver
Resolver con statore a doppio avvolgimento a 90° e rotore asingolo avvolgimento e trasformatore.
Resolver tipo RS0
Risoluzione 0.8‘
Precisione ±10‘
Controllo di posizione assoluto 1 giro
Velocità massima (continuativa) 8000 rpm
Velocità massima (per brevi periodi) 10000 rpm
Tensione ingresso 10 V
Frequenza ingresso 4 kHz
Rapporto statore/rotore 0.3 ± 5%
Impedenza rotore Zro 51 Ω + j90 Ω
Impedenza statore Zs0 102 Ω + j150 Ω
Impedenza Zrs 44 Ω + j76 Ω
Resistenza isolamento >10 MΩ a 500 V DC
Numero coppie di poli 1
Errore massimo di fase ±10 minuti d’angolo
Connettore tipo EWS0006
Encoder tipo Incrementale TTL Incrementale SinCos Assoluto SinCos
Modello ITD21 CDD50 ITD22 EQI1329 SRS50 SRM50 SCS70 SCM70 ECN1313 EQN1325
Resistenza alle vibrazioni Buona Buona Buona Buona Buona Buona Buona Buona Molto buona Molto buona
Multigiro ö ö ö ö
Tipologia costruttiva Brushless Brushless Brushless Brushless Brushless Brushless Brushless Brushless Brushless Brushless
albero cavo albero conico albero cavo albero conico albero conico albero conico albero cavo albero cavo albero conico albero conico
Numero incrementi 2048 TTL 2048 TTL 2048 Sin 32 Sin 1024 Sin 1024 Sin 512 Sin 512 Sin 2048 Sin 2048 Sin
Risoluzione 2.6 min 2.6 min 0.4 min 0.4 min 0.4 min 0.4 min 0.4 min 0.4 min 0.4 min 0.4 min
Precisione ± 2 min ± 2 min ± 0.8 min ± 5 min ± 0.8 min ± 0.8 min ± 0.8 min ± 0.8 min ± 0.6 min ± 0.6 min
Rotazioni assolute 0 0 0 4096 1 4096 1 4096 1 4096
Interfaccie - - - Endat Hiperface Hiperface Hiperface Hiperface Endat Endat
Velocità massima 8˙000 min–1 9˙000 min–1 8˙000 min–1 12˙000 min–1 12˙000 min–1 12˙000 min–1 12˙000 min–1 12˙000 min–1 15˙000 min–1 12˙000 min–1
Frequenza limite 300 kHz 300 kHz 180 kHz 6 kHz 200 kHz 200 kHz 100 kHz 100 kHz 200 kHz 200 kHz
Segnali in uscita TTL 5V TTL 5V ~ 1Vss ~ 1Vss ~ 1Vss ~ 1Vss ~ 1Vss ~ 1Vss ~ 1Vss ~ 1Vss
5 V ± 5% 5 V ± 10% 5 V ± 10% 5 V ± 5% 7...12 V 7...12 V 7...12 V 7...12 V 5 V ± 5% 5 V ± 5%
Assorbimento 150 mA 50 mA 100 mA 130 mA 80 mA 80 mA 100...130 mA 100...130 mA 150 mA 250 mA
Motori MCS azionati da: 94xx 93xx - ECS 93xx - ECS a richiesta a richiesta 94xx 94xx
Motori MCA azionati da: 93xx - ECS 93xx - ECS 93xx - ECS 94xx 93xx 93xx - ECS 93xx - ECS 93xx - ECS 94xx 94xx
Motori MDFQA azionati da: 93xx - ECS 93xx - ECS 93xx - ECS 94xx 93xx - ECS 93xx - ECS 93xx - ECS 93xx - ECS 94xx 94xx
Codice d’ordine T20 CDD S20 EQI SRS SRM SCS SCM ECN EQN
Connettore tipo EWS0010 EWS0010 EWS0010 EWS0017 EWS0010 EWS0010 EWS0010 EWS0010 EWS0017 EWS0017
Encoder incrementali e assoluti

Servomotori
2-81Drives, motori, automazione 9/2006
2
3
Motore tipo Ventilatore tipo Temperatura Tensione nom. Frequenza nom. Corrente nom. Potenza nom.
ambiente ammiss. UN fN IN PN
[V] [Hz] [A] [W]
MCA 13 < 75 °C 210...240, 1~ 50/60 0.12 19
MCA 14 < 75 °C 210...240, 1~ 50/60 0.12 19
MCA 17 < 55 °C 210...240, 1~ 50/60 0.32 46
MCA 19 < 55 °C 210...240, 1~ 50/60 0.32 46
MCA 21 < 70 °C 210...240, 1~ 50/60 0.26 60
MDFQA 100 G2D 120 380...460, 3~ 50/60 0.11 60
G2D 140 con filtro 380...460, 3~ 50/60 0.25 150
DNG 3-4.5 con o senza filtro,
tensione ampliata350...540, 3~ 50/60 0.25 100
MDFQA 112 G2D 160 con o senza filtro 380...460, 3~ 50/60 0.5 320
DNG 5-12.5 con o senza filtro,
tensione ampliata350...540, 3~ 50/60 0.75 390
MDFQA 132 G2D 180 380...460, 3~ 50/60 0.66 415
DNG 8-12 con o senza filtro,
tensione ampliata 350...540, 3~ 50/60 1.4 660
MDFQA 160 DNG 6-35 con o senza filtro,
tensione ampliata350...540, 3~ 50/60 1.4 660
Ventilatori
InstallazioneI motori sono idonei per tutte le posizioni di montaggio, masolo la posizione orizzontale (connettori / morsettiera sullato superiore) assicura la conformità alle esigenze diprotezione.
Servomotore asincronoMCA 14 servoventilato conalbero d’uscita per montaggiodiretto con i riduttori.

Servomotori
2-82 Drives, motori, automazione 9/2006
2 2
3
Cavi di sistema
Resolver
Resolver
Cavi collegamento al motore ed al freno
posa fissa 1,0 mm2: EYP0003A LLLL MxxA00; 6,0 mm2: EYP0007A LLLL MxxA001,5 mm2: EYP0004A LLLL MxxA00; 10 mm2: EYP0008A LLLL MxxA002,5 mm2: EYP0005A LLLL MxxA00; 16 mm2: EYP0009A LLLL MxxA004,0 mm2: EYP0006A LLLL MxxA00;
posa mobile 1,0 mm2: EYP0010A LLLL MxxA00; 6,0 mm2: EYP0014A LLLL MxxA001,5 mm2: EYP0011A LLLL MxxA00; 10 mm2: EYP0015A LLLL MxxA002,5 mm2: EYP0012A LLLL MxxA00; 16 mm2: EYP0016A LLLL MxxA004,0 mm2: EYP0013A LLLL MxxA00;
prolunghe posa fissa: EYP000xV LLLL MxxP0x;
posa mobile: EYP00xxV LLLL MxxP0x
Cavi collegamento al ventilatore
posa fissa EYL0001A LLLL L02A00
posa mobile EYL0002A LLLL L02A00
prolunghe posa fissa: EYP0001V LLLL L02J02;
posa mobile: EYP0002V LLLL L02J02
Cavi collegamento al resolver o all'encoder
posa fissa Resolver: EYF0017A LLLL F01S01Encoder incrementale: EYF0018A LLLL F02S04Encoder con interfaccia EnDat: EYF0021A LLLL F02W02
prolunghe a posa fissa Resolver: EYF0017V LLLL F01G01Encoder incrementale: EYF0018V LLLL F02G02Encoder con interfaccia EnDat: EYF0021V LLLL F02G02
prolunghe a posa mobile Resolver: EYF0020V LLLL F01G01Encoder incrementale: EYF0019V LLLL F02G02Encoder con interfaccia EnDat: EYF0022V LLLL F02G02
Per un collegamento rapido tra i drive ed i motori Lenze, dotati di connet-tori, sono disponibili una grande varietà di cavi.

Servomotori come ordinare
2-83Drives, motori, automazione 9/2006
2
Servomotori sincroni MCS
òMCS 06C41 òMCS 06F41 òMCS 06I410.6 Nm/0.25 kW 1.2 Nm/0.51 kW 1.5 Nm/0.64 kW4050 giri/min 4050 giri/min 4050 giri/min
òMCS 06C60 òMCS 06F60 òMCS 06I600.5 Nm/0.31 kW 0.9 Nm/0.57 kW 1.2 Nm/0.75 kW6000 giri/min 6000 giri/min 6000 giri/min
òMCS 09F38 òMCS 09H41 òMCS 12H15 òMCS 12L203.1 Nm/1.2 kW 3.8 Nm/1.6 kW 10.0 Nm/1.6 kW 14.0 Nm/4.9 kW3750 giri/min 4050 giri/min 1500 giri/min 1950 giri/min
òMCS 09F60 òMCS 09H60 òMCS 12H35 òMCS 12L412.4 Nm/1.5 kW 3.0 Nm/1.9 kW 8.0 Nm/3.0 kW 11.5 kW/4.9 Nm6000 giri/min 6000 giri/min 3525 giri/min 4050 giri/min
òMCS 14D15 òMCS 14H15 òMCS 14L15 òMCS 14P149.2 Nm/1.45 kW 16.0 Nm/2.5 kW 23.0 Nm/3.6 kW 30.0 Nm/4.2 kW1500 giri/min 1500 giri/min 1500 giri/min 1350 giri/min
òMCS 14D36 òMCS 14H32 òMCS 14L32 òMCS 14P327.5 Nm/2.8 kW 14.0 Nm/4.7 kW 17.2 Nm/5.8 kW 21.0 Nm/7.1 kW3600 giri/min 3225 giri/min 3225 giri/min 3225 giri/min
òMCS 19F14 òMCS 19J14 òMCS 19P1427.0 Nm / kW 40.0 Nm / 6.0 kW 51.0 Nm / 7.2 kW1425 giri/min 14250 giri/min 1350 giri/min
òMCS 19F30 òMCS 19J30 òMCS 19P3021.0 Nm/6.6 kW 29.0 Nm/9.1 kW 32.0 Nm/10.0 kW3000 giri/min 3000 giri/min 3000 giri/min
Tensione motore
ò400 V ò230 V (possibile solo per MCS 06, MCS 09, MCS 12H, MCS 12L20)
Retroazione
òResolver
òEncoder SinCos òEncoder SinCos òEncoder SinCos òEncoder SinCos Monogiro Multigiro Monogiro MultigiroSRS 50 SRM 50 SCS70 a richiesta per 9300 SCM70 a richiesta per 9300
Freno
òSenza freno òFreno a magnete permanente òFreno rinforzato a magnete permanente24 VDC 24 VDC (non per MCS 06, MCS 19)
Flangia ed albero
òFlangia B5 standard òFlangia B5 standardAlbero liscio Albero con chiavetta
Collegamenti elettrici
òConnettori separati per òMorsettiera per potenza/freno potenza/freno/retroazione/temperaturaretroazione/temperatura (non per MCS 06)
Protezione
òIP54 senza anello di tenuta albero d’uscita òIP65 con anello di tenuta albero d’uscita
Protezione termica
òSensore KTY
Targhetta identificativa
òTarghetta internazionale òTarghetta aggiuntiva
Codice cliente Ordine n° . . . . . . . . . . . . . . . . . . . . del . . . . / . . . . /. . . . . . . .
ô

Servomotoricome ordinare
2-84 Drives, motori, automazione 9/2006
2
Codice cliente Ordine n° . . . . . . . . . . . . . . . . . . . . del . . . . / . . . . /. . . . . . . .
Servomotori asincroni MCA
Senza ventilatore Con ventilatore
òMCA 10I40...S002.0 Nm / 0.8 kW3950 giri/min
òMCA 13I41…S00 òMCA 13I34…F104.0 Nm / 1.7 kW 6.3 Nm / 2.2 kW4050 giri/min 3410 giri/min
òMCA 14L20...S00 òMCA 14L21...S00 òMCA 14L16...F10 òMCA 14L35...F106.7 Nm / 1.4 kW 5.4 Nm / 2.3 kW 12.0 Nm / 2.1 kW 10.8 Nm / 3.9 kW2000 giri/min 4100 giri/min 1635 giri/min 34550 giri/min
òMCA 17N23...S00 òMCA 17N41...S00 òMCA 17N17...F10 òMCA 17N35...F1010.8 Nm / 2.6 kW 9.5 Nm / 4.1 kW 21.5 Nm / 3.8 kW 19.0 kW / 6.9 Nm6000 giri/min 4110 giri/min 1680 giri/min 3480 giri/min
òMCA 19S23...S00 òMCA 19S42...S00 òMCA 19S17...F10 òMCA 19S35...F1016.3 Nm / 4.0 kW 12.0 Nm / 5.2 kW 36.3 Nm / 6.4 kW 36.0 Nm / 13.2 kW2340 giri/min 4150 giri/min 1700 giri/min 3510 giri/min
òMCA 21X25...S00 òMCA 21X42...S00 òMCA 21X17...F10 òMCA 21X35...F1024.6 Nm / 6.4 kW 17.0 Nm / 7.4 kW 61.4 Nm / 11.0 kW 55.0 Nm / 20.3 kW2490 giri/min 4160 giri/min 1710 giri/min 3520 giri/min
Retroazione
òResolver
òEncoder SinCos òEncoder SinCos òEncoder SinCos òEncoder SinCos Monogiro Multigiro Monogiro MultigiroSRS 50 SRM 50 SCS70 a richiesta per 9300 SCM70 a richiesta per 9300
òEncoder incrementale òEncoder incrementale òEncoder incrementaleTTL, 2048 TTL, 2048 SinCos, 2048ITD21 CDD 50 ITD22
Freno
òSenza freno òFreno a magnete permanente òFreno rinforzato a magnete permanente24 VDC 24 VDC
Flangia ed albero
òFlangia standard B5 òFlangia standard B5 òFlangia standard B14 òFlangia standard B14Albero liscio Albero con chiavetta Albero liscio Albero con chiavetta
Collegamenti elettrici
òConnettori separati per òMorsettiera per òMorsettiera per potenza/freno potenza/freno/ventilatoreretroazione/temperatura retroazione/temperatura Connettore per
retroazione/temperatura
Protezione
òIP54 senza anello di tenuta albero d’uscita òIP65 con anello di tenuta albero d’uscita
Protezione termica
òSensore KTY
Targhetta identificativa
òTarghetta internazionale òTarghetta aggiuntiva
ô
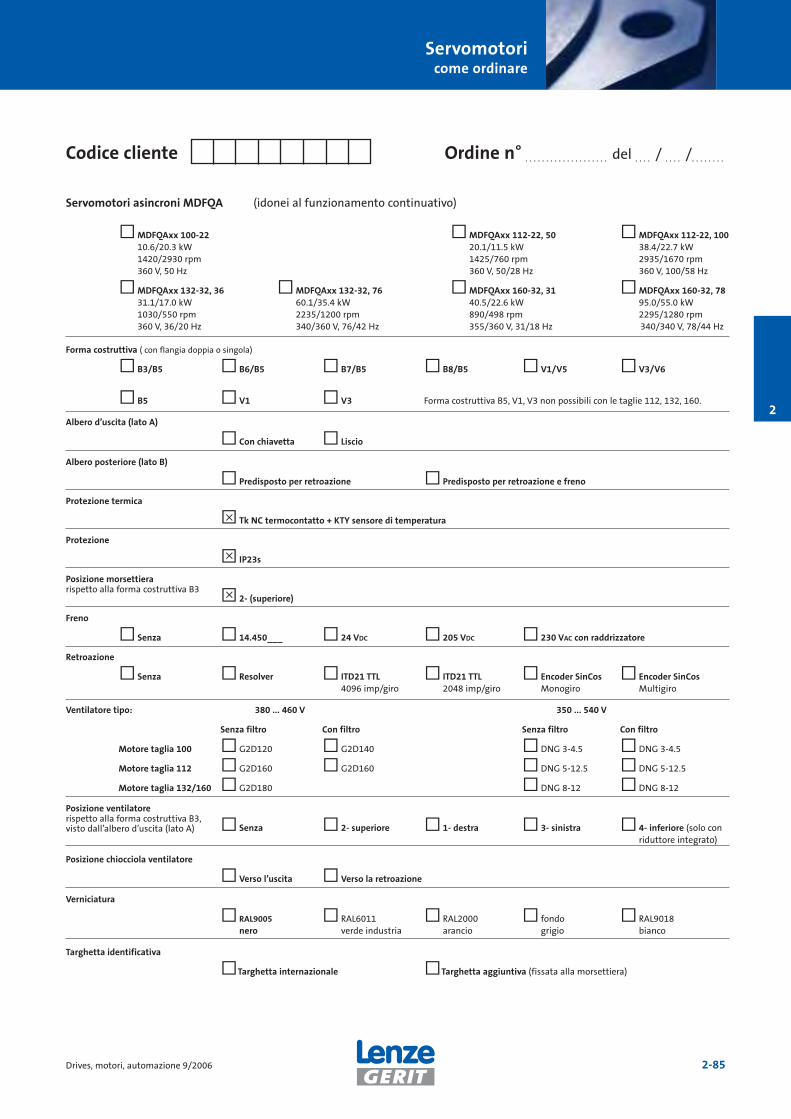
Servomotori come ordinare
2-85Drives, motori, automazione 9/2006
2
Codice cliente Ordine n° . . . . . . . . . . . . . . . . . . . . del . . . . / . . . . /. . . . . . . .
Servomotori asincroni MDFQA (idonei al funzionamento continuativo)
òMDFQAxx 100-22 òMDFQAxx 112-22, 50 òMDFQAxx 112-22, 10010.6/20.3 kW 20.1/11.5 kW 38.4/22.7 kW1420/2930 rpm 1425/760 rpm 2935/1670 rpm360 V, 50 Hz 360 V, 50/28 Hz 360 V, 100/58 Hz
òMDFQAxx 132-32, 36 òMDFQAxx 132-32, 76 òMDFQAxx 160-32, 31 òMDFQAxx 160-32, 7831.1/17.0 kW 60.1/35.4 kW 40.5/22.6 kW 95.0/55.0 kW1030/550 rpm 2235/1200 rpm 890/498 rpm 2295/1280 rpm360 V, 36/20 Hz 340/360 V, 76/42 Hz 355/360 V, 31/18 Hz 340/340 V, 78/44 Hz
Forma costruttiva ( con flangia doppia o singola)
òB3/B5 òB6/B5 òB7/B5 òB8/B5 òV1/V5 òV3/V6
òB5 òV1 òV3 Forma costruttiva B5, V1, V3 non possibili con le taglie 112, 132, 160.
Albero d’uscita (lato A)
òCon chiavetta ò Liscio
Albero posteriore (lato B)
òPredisposto per retroazione òPredisposto per retroazione e freno
Protezione termica
ò Tk NC termocontatto + KTY sensore di temperatura
Protezione
ò IP23s
Posizione morsettierarispetto alla forma costruttiva B3
ò2- (superiore)
Freno
ò Senza ò14.450___ ò24 VDC ò205 VDC ò230 VAC con raddrizzatore
Retroazione
ò Senza òResolver ò ITD21 TTL ò ITD21 TTL ò Encoder SinCos ò Encoder SinCos4096 imp/giro 2048 imp/giro Monogiro Multigiro
Ventilatore tipo: 380 ... 460 V 350 ... 540 V
Senza filtro Con filtro Senza filtro Con filtro
Motore taglia 100 òG2D120 òG2D140 òDNG 3-4.5 òDNG 3-4.5
Motore taglia 112 òG2D160 òG2D160 òDNG 5-12.5 òDNG 5-12.5
Motore taglia 132/160 òG2D180 òDNG 8-12 òDNG 8-12
Posizione ventilatorerispetto alla forma costruttiva B3,
ò Senza ò2- superiore ò1- destra ò3- sinistra ò4- inferiore (solo convisto dall’albero d’uscita (lato A)riduttore integrato)
Posizione chiocciola ventilatore
òVerso l’uscita òVerso la retroazione
Verniciatura
ò RAL9005 òRAL6011 òRAL2000 ò fondo òRAL9018nero verde industria arancio grigio bianco
Targhetta identificativa
òTarghetta internazionale òTarghetta aggiuntiva (fissata alla morsettiera)
ô
ô
ô

Servomotori
2-86 Drives, motori, automazione 9/2006
2

Motoriduttori
2-87Drives, motori, automazione 10/2006
2
Prestazioni,robustezza
G-motion:riduttori à la carte
Una gamma di motoriduttori superaffidabili edestremamente versatili, disponibili in tutte le più comunitipologie di riduttore: questa è G-motion
La serie di motoriduttori G-motion, già molto versatilenell'esecuzione standard, è integrabile con pratiche opzioniper il lato di ingresso e uscita ed offre all'utilizzatorenumerose possibilità di combinazione.
G-motion constmotoriduttori e riduttori con velocità costante
G-motion atexmotoriduttori e riduttori conformi alla Direttiva ATEX
G-motion motecmotoriduttori con inverter 8200 motec integrato
G-motion servomotoriduttori per applicazioni a dinamica elevata
G-motion EHBmotoriduttori per trasportatori a monorotaia aerea
Tipi di riduttoriI riduttori sono disponibili nelle tipologie seguenti:˘ riduttori coassiali˘ riduttori ad assi paralleli˘ riduttori a coppia conica˘ riduttori ortogonali˘ riduttori a vite senza fine con precoppia˘ servoriduttori epicicloidali˘ servoriduttori a vite senza fine
VelocitàGrazie agli ampi campi di riduzione e agli incrementiravvicinati dei rapporti di riduzione è possibile adattare inmodo ottimale le caratteristiche dell'azionamento aiparametri di processo richiesti.

Motoriduttori
2-88 Drives, motori, automazione 10/2006
2
Riduttori coassiali Riduttori ad assi paralleli Riduttori ortogonali Riduttori v.s.f. bistadioGST GFL GKS GSS
Riduttori coassiali Riduttori ad assi paralleli Riduttori ortogonali Riduttori a vite senza fine a dentatura elicoidale, a dentatura elicoidale, a tre stadi, con ingranaggi bistadio, con ingranaggi
mono o bistadio (tre stadi con precoppia) elicoidali e coppia conica elicoidali e vite senza fine(tre stadi con precoppia) con carcassa piatta (quattro stadi con precoppia) (tre stadi con precoppia)
Densità di coppia Media Media Media Media
Rendimento Elevato Elevato Elevato Medio
Gioco angolare Contenuto Contenuto Contenuto Medio
Taglie disponibili 8 7 7 4
Potenza 0,06 … 45 kW 0,12 … 45 kW 0,12 … 45 kW 0,12 … 9,2 kW
Coppia nominale 45 … 5.920 Nm 190 … 11.600 Nm 190 … 11.790 Nm 180 … 1.250 Nm
Rapporti di riduzione 1,6 … 435 3,5 … 856 5 … 1.510 5,6 … 1.847
Albero Sporgente Sporgente/Cavo Sporgente/Cavo Sporgente/Cavo
Forma costruttiva Piedi/Flangia Piedi/Flangia Piedi/Flangia Piedi/Flangia
Tipo di accoppiamento Diretto o standard coi motori Diretto o standard coi motori Diretto o standard coi motori Diretto o standard coi motoririduttore-motore MDXMA, MCS, MCA, MDXMA, MCS, MCA. MDXMA, MCS, MCA. MDXMA, MCS, MCA.
SDSGA, SDSGS. Standard coi motori Standard coi motori Standard coi motoriStandard coi motori MDFQA MDFQA MDFQA
MDFQA, 710, 750
Riduttori epicicloidali Riduttori epicicloidali Riduttori epicicloidali Riduttori epicicloidaliSPL MPV MPR MPG
Riduttori epicicloidali Riduttori epicicloidali Riduttore epicicloidale Riduttore epicicloidalead uno o due stadi di precisione di alta precisione di alta precisione
ad uno o due stadi ad uno o due stadi ad uno o due stadi
Densità di coppia Elevata Molto elevata Molto elevata Molto elevata
Rendimento Medio > 97% > 97% > 97%
Gioco angolare Contenuto < 7 arcmin < 3 arcmin < 3 arcmin
Rigidità torsionale Buona 2,8 ... 47 Nm/arcmin 2,8 ... 225 Nm/arcmin 2,8 ... 225 Nm/arcmin
Velocità ingresso n1 8˙000 giri/min 8˙000 giri/min 8˙000 giri/min
Taglie disponibili 5 4 6 6
Coppia nominale 3 … 120 Nm 15 … 360 Nm 15 … 1˙000 Nm 15 … 1˙000 Nm
Rapporti di riduzione 3,7 … 168 3 ... 100 3 ... 100 3 ... 100
Albero Sporgente Sporgente Sporgente Flangia ISO 9409
Forma costruttiva Flangia Flangia Flangia Flangia
Tipo di accoppiamento Standard con Standard con Standard con Standard conriduttore-motore SDSGA, SDSGS, MCS, MCA MCS, MCA MCS, MCA
13.710, 13.750
Programma motoriduttori

Motoriduttori
2-89Drives, motori, automazione 10/2006
2
Riduttori ortogonali leggeri Riduttori ortogonali Motoriduttori Riduttori v.s.f.GKR GKK G SSN
Riduttori ortogonali Riduttori ortogonali Motoriduttori ad Riduttori monostadio bistadio, con ingranaggi con disinnesto assi paralleli a vite senza fineelicoidali e coppia conica integrato
Media Media Media Elevata
Medio Medio Medio Contenuto
Contenuto Contenuto Medio Medio
4 4 6 3
0,06 … 7,5 kW 0,12 … 5,5 kW 0,005 … 0,09 kW 0,025 … 0,2400 kW
45 … 450 Nm 70 … 900 Nm 19 … 100 Nm 7 … 36 Nm
3,4 … 76 7,7 ... 86,8 3 ... 2000 5 … 80
Sporgente/Cavo Sporgente Sporgente Sporgente/Cavo
Piedi/Flangia Piedi/Flangia Flangia Piedi/Flangia
Diretto coi motori Diretto coi motori Motore integrato Diretto coi motoriMDXMA, MCS, MCA, MDXMA SDSGA, SDSGS,
SDSGA, SDSGS. 710, 750Standard coi motori
MDFQA, 710, 750
Riduttori v.s.f. Servo rinvii Riduttori ortogonaliSLC SK KS
Riduttori a vite senza fine Riduttori a coppia conica Riduttori ortogonali di precisione di alta precisione di precisione
con eventuale secondo a due stadi, con ingranaggistadio epicicloidale elicoidali e coppia conica
Elevata Elevata
> 96% > 97% > 96%
< 3 arcmin < 2 arcmin < 4 arcmin
30 ... 185 Nm/arcmin
6˙000 giri/min 7˙500 giri/min 6˙000 giri/min
5 3 - 4 8
23 … 817 Nm 16 ... 1800 Nm 100 ... 13000 Nm
5 … 83 3 ... 100 6 ... 48
Sporgente/Cavo Sporgente/Cavo/Flangia ISO Sporgente/Cavo
Piedi/Flangia Flangia Piedi/Flangia
Standard con Standard con Standard conMCS, MCA MCS, MCA MCS, MCA

Motoriduttori
2-90 Drives, motori, automazione 10/2006
2
I riduttori Lenze svolgono il proprio lavoro senza che ve neaccorgiate. Nell’automotive, in gru edili o nelle interminabilicorsie di un magazzino automatico con alte scaffalature, inostri riduttori si distinguono per la capacità di adattarsi inmodo ottimale ai parametri della macchina o richiesti dalprocesso. Ciò è possibile grazie ad un sistema di riduzionemodulare ad alte prestazioni, in grado di soddisfarepraticamente ogni esigenza di velocità in uscita. Le moltepliciopzioni in ingresso e in uscita offrono funzionalità aggiuntivee facilitano l'integrazione del sistema nella macchina delCliente.I motoriduttori G-motion si differenziano per l'ampio campodi potenze da 0,06 a 45 kW.
Profili ottimizzati dei denti e le ruote dentate rettificateassicurano un funzionamento silenzioso, rendimenti elevatied un gioco angolare ridotto. I riduttori sono compatti edoffrono ingombri minimi.
I motori sono realizzati con grado di protezione IP55 già nellaversione standard e soddisfano i requisiti della classe diefficienza EFF 2. Grazie all'ottima costruzione meccanica,all’isolamento in classe termica F (utilizzo secondo la classeB) ed ai sensori di temperatura integrati, i motori sonoparticolarmente indicati per il funzionamento con inverter.
I motoriduttori G-motion sono apprezzati per il loro elevatolivello di qualità che assicura la massima produttività edaffidabilità per l'intero ciclo di vita delle macchine e degliimpianti sui quali soni installati.Per dimostrare la fiducia nella qualità dei propri prodottiLenze offre una garanzia di 24 mesi in tutta Europa.
G-motion const
Albero pieno
Albero cavo
Albero cavo concalettatore
Flangia di uscita
Albero pieno
Flangia di uscita

Motoriduttori
2-91Drives, motori, automazione 10/2006
2
Motoriduttori ortogonali GKS
0,12 ... 45 kW
≤ 11800 Nm
Motoriduttori a vite senza
fine con precoppia GSS
0,12 ... 15 kW
≤ 1250 Nm
Motoriduttori ad assi paralleli
GFL
0,12 ... 45 kW
≤ 11300 Nm
Motoriduttori ortogonali
leggeri GKR
0,06 ... 7,5 kW
≤ 450 Nm
Servoventilato
Autoventilato
Autoventilato con momentod'inerzia maggiorato
Servoventilato
Freno amolle
Trasduttoredi velocità/posizione
Volantino
Autoventilato
Autoventilato
Autoventilato con momentod'inerzia maggiorato
Volantino
Trasduttore divelocità/posizione Servoventilato
Avviatore starttec
Motoriduttori coassiali GST
0,06 ... 45 kW
≤ 6000 Nm

Motoriduttori
2-92 Drives, motori, automazione 10/2006
2
Il datore di lavoro deve rispettare i requisiti della Direttiva 99/92/CE (Atex 137)
Obiettivo: migliorare la sicurezza e la salute dei lavoratori chepotrebbero essere esposti ad atmosfere esplosive
Armonizzazione Atex della protezione antideflagrante in Europea
Protezione antideflagrante in Europa (nuovo principio)
Costruttore Utilizzatore (datore di lavoro)
G-motion atex
Per rispondere senza compromessi alla direttiva europea Atexche disciplina l'utilizzo delle apparecchiature in ambientiesplosivi, entrata in vigore il 1 luglio 2003, Lenze offreriduttori e motoriduttori conformi Atex, in grado diagevolare l'omologazione di macchine e impianti.
I riduttori:˘ Atex categoria 2 nelle classi di temperatura T3 e T4 ˘ Potenze fino a 45 kW˘ Accoppiamento al motore diretto con la flangia di
montaggio Lenze o tramite un adattatore per motore IECsul lato di ingresso
˘ Finestrella di controllo del livello dell'olio ˘ Utilizzo di soli lubrificanti sintetici
I motori˘ Motori integrati per le categorie 2G, 2D e 3G, 3D˘ Motori pressurizzati per funzionamento con inverter per
le categorie 2GD e 3GD con adattatore IEC
I prodotti devono soddisfare i requisiti della Direttiva 94/9/CE (Atex 95).
Obiettivo: assicurare requisiti di qualità uniformi attraversoprocedure di valutazione della conformità

Motoriduttori
2-93Drives, motori, automazione 10/2006
2
G-motion motec: motoriduttore con inverter integrato
L'inverter 8200 motec integrato consente di soddisfare almeglio l’esigenza di soluzioni decentralizzate di azionamento.
In considerazione della notevole diminuzione dei tempi dimontaggio e messa in servizio, nonché dell'impiego ridotto dicavi motore schermati, i vantaggi offerti dai sistemidecentralizzati sono sempre più interessanti, soprattuttonelle applicazioni tecnologiche di movimentazione deimateriali.
Il robusto motoinverter è dotato di tutto ciò che serve. Lacarcassa con grado di protezione IP55 abbinata a unmotoriduttore della serie G-motion assicura unfunzionamento senza problemi anche nelle condizioni piùdifficili. La concezione scalare del drive, basata sullacombinazione di numerosi moduli d’automazione, permetteuna perfetta integrazione nell’automazione dell’impianto enel relativo bus di campo.
Sfruttando tutti i vantaggi della gamma di motoriduttorimodulari, questa riuscita combinazione di meccanica edelettronica di azionamento trova impiego in vasti settoriindustriali in un campo di potenze da 0,12 a 7,5 kW. Grazieall'isolamento in classe termica F (utilizzo secondo la classe B)e ai sensori di temperatura integrati, i motori sonoparticolarmente adatti per il funzionamento con inverter.
Le numerose opzioni per l'inverter 8200 motec consentono diampliare il campo di applicazione e le funzionalità.Parametrizzazione, funzionamento e diagnostica sonopossibili a livello locale o tramite connessione a bus di campo.In questo modo è possibile eseguire con efficienza leoperazioni di installazione, montaggio e messa in serviziodegli impianti e nell'eventualità remota di un problema sipotrà eseguire una rapida sostituzione riducendo i tempi difermo macchina.

Motoriduttori
2-94 Drives, motori, automazione 10/2006
2
G-motion servo
Motoriduttori innovativi e drives performanti assicurano lepiù alte prestazioni in tutte le applicazioni dove dinamica,precisione di posizionamento e robustezza sono requisitiimprescindibili.
Con un'ampia offerta di motoriduttori nelle seguenti varianti:
˘ riduttori coassiali˘ riduttori ad assi paralleli˘ riduttori a coppia conica˘ riduttori ortogonali˘ servoriduttori epicicloidali˘ servoriduttori a vite senza fine
Lenze offre alti livelli di funzionalità e la conformità connumerosi standard industriali. L’elevata velocità accettata daiservoriduttori Lenze, consente di ottimizzare gli ingombri e leinerzie.
I servomotoriduttori Lenze sono disponibili con potenze da0,25 a 20,3 kW.
˘ Campo di potenze dei servomotori sincroni: 0,25 a 10 kW
˘ Campo di potenze dei servomotori asincroni: 0,8 a 20,3 kW
L’abbinamento ai servodrive Lenze permette di ottenereun'unità di azionamento perfetta con una dinamica elevata.

Motoriduttori
2-95Drives, motori, automazione 10/2006
2
G-motion EHB
I sistemi a monorotaia aerea (EHB) sono utilizzati in moltisettori per il trasporto dei materiali all'interno delle aziende.Questi sistemi sono caratterizzati da un elevato grado diautomazione e rappresentano un mezzo di trasportoflessibile ed efficiente soprattutto nel settoreautomobilistico. I motoriduttori Lenze EHB, abbinati ad un sistema di controllomotore decentralizzato, costituiscono una soluzionecompleta per numerose applicazioni.
Grazie alle dimensioni compatte ed alla capacità disupportare elevate forze radiali, i motoriduttori Lenze sonoparticolarmente adatti per questo tipo di sistemi.
˘ Coppie fino a 900 Nm˘ Carichi radiali fino a 36000 N˘ Disinnesto manuale integrato per la separazione del
flusso di forze˘ Dentatura conica a rendimento elevato˘ Costruzione compatta˘ Opzioni di montaggio versatili: fissaggio a flangia o
tramite fori filettati sul lato superiore o inferiore delriduttore
˘ Elevata silenziosità grazie alla geometria ottimizzata delladentatura ed alla carcassa in ghisa sferoidale connervature
˘ Funzionamento uniforme senza vibrazioni˘ Controlli motore decentralizzati specifici per una perfetta
integrazione nel sistema di automazione dell’impianto.
Numerose possibilità di applicazioneI motoriduttori EHB sono conformi alla normativa VDI 3643(C1 standard). Sono dotati di un disinnesto meccanico perl'interruzione del moto. In tal modo, in caso di necessità, èpossibile spostare manualmente il carrello.Questo principio costruttivo è molto apprezzato dagliutilizzatori ditrasportatori monorotaia, anche di tipo apavimento. Oltre alla modalità di accoppiamento a flangia iriduttori possono essere forniti anche con fori filettati sul latosuperiore o inferiore, per la massima flessibilità dimontaggio.Per interventi di assistenza, è possibile eseguire un rapidosmontaggio dell'azionamento senza necessità di estrarre ilgirante, con conseguente riduzione dei tempi di fermomacchina e dei costi.

Motoriduttori
2-96 Drives, motori, automazione 10/2006
2
Automazione
3-1Drives, motori, automazione 10/2006
3
Modularità e decentramentoCon la realizzazione di una nuova generazione di "aziona-menti intelligenti", primi fra tutti i Servo 9300, già da tempo,nelle macchine più avanzate sono stati eliminati gli aziona-menti centralizzati e le conseguenti complesse trasmissionimeccaniche. Questo tipo d'azionamenti, in grado d'offrirenumerose funzioni tecnologiche, hanno reso obsoleti nume-rosi cinematismi meccanici speciali, come: rotismi epicicloi-dali, controlli meccanici di registro, trasmissioni ad angolo,camme meccaniche, ecc.. L'eliminazione di questa "meccani-ca aggiuntiva" ha così consentito sia un risparmio sui costi,sia una maggior versatilità d'impiego delle macchine.
Il controllo dei processi è tuttavia ancora principalmenteattuato tramite PLC che, attraverso un sistema di bus, con-trollano ogni singola parte della macchina. Gli svantaggi diqueste unità centralizzate sono abbastanza evidenti e di fattolimitano le possibilità di realizzare macchine costituite dacomponenti modulari.
PLC decentratiL'ultimo passo verso la realizzazione di macchine costruitesecondo principi di modularità, è costituito dal decentramen-to del controllo di processo. Un tale risultato può conseguirsitramite l'impiego di PLC più piccoli "ad hoc".
Non si tratta di sostituire il PLC centrale, bensì integrarnele funzionalità, decentrando il controllo delle varie unità
Automazione
Lenze
satellite che compongono la macchina. Questa soluzioneoffre un notevole sgravio del carico sul controllore centrale(PC o PLC) e la conseguente riduzione dei tempi di ciclo per ilcontrollo dell'azionamento. Il tangibile miglioramento dellaqualità di produzione, la maggior versatilità e velocità di pro-duzione sono gli effetti più evidenti dell'impiego di tanti pic-coli PLC.
Lenze, sempre anticipatrice nella propria offerta tecnologi-ca, ha realizzato due interessanti soluzioni per il decentra-mento del controllo di processo.
Servo PLC: servoinverter serie 9300 con funzionalità PLC
Drive PLC: PLC compatto, dedicato al controllo di unità decen-trate.
Versatilità ed integrazione

Automazione
3-2 Drives, motori, automazione 10/2006
3

AutomazioneDrive PLC
3-3Drives, motori, automazione 10/2006
3
Vantaggi rispetto ai tradizionali PLC˘ L’interfacciamento con gli inverter attraverso il system bus
integrato (CAN Open), consente d'evitare connessioniparallele e morsetti superflui.
˘ Perfetta compatibilità degl'inverter Lenze con i programmiPLC, grazie alla libreria software integrata di serie nelDrivePLC.
˘ La disponibilità di numerosi moduli Bus, consenteun’immediato inserimento in una rete fieldbus
Drive PLC ...... più di un PLC
Compatto e integrato
Il Drive PLC è una CPU ad alte prestazioni studiata per ilcomando dei drives Lenze. Grazie alla sua versatilità, questaunità costituisce un'interessante alternativa ai PLC convenzio-nali. Il systembus integrato (CANopen) è in grado di realizzareuna rete particolarmente economica ed efficiente, assicura uninterfacciamento perfetto con tutti gli azionamenti Lenze erende superflui collegamenti digitali ed analogici.
Mediante il semplice inserimento d’uno dei numerosimoduli di comunicazione ad innesto frontale, è possibile il col-legamento ai più diffusi bus comunicazione. Sono disponibilimoduli ProfiBus-DP, InterBus-S, DeviceNet, seriale RS 232,RS485 e fibra ottica.
Ma è nelle applicazioni più complesse che il Drive PLC sidistingue. In questi casi, la CPU Lenze viene impiegata, sia peraffiancare il PLC centrale, riducendone il carico, sia come anel-lo di collegamento (funzionalità gateway) tra tra il livello deidrive (CAN) ed la rete di comunicazione di livello superiore. Lanotevole riduzione dei tempi di ciclo, tra PLC e l'azionamento,consente un miglioramento tangibile delle funzionalità dicontrollo e di regolazione.
Il software di programmazione è basato sullo standardinternazionale IEC 1131-3 ed integra le librerie degli inverterLenze. L’abbinamento Drive PLC - drives Lenze è pertanto mol-to vantaggioso, non solo per l'ottimo controllo dei movimentidella vostra macchina ed il decentramento delle funzioni, masoprattutto per la notevole semplificazione sia della messa inservizio sia della conduzione.
˘ Funzionalità gateway ˘ Completo di I/O digitali ed analogici˘ Riduzione dei costi.
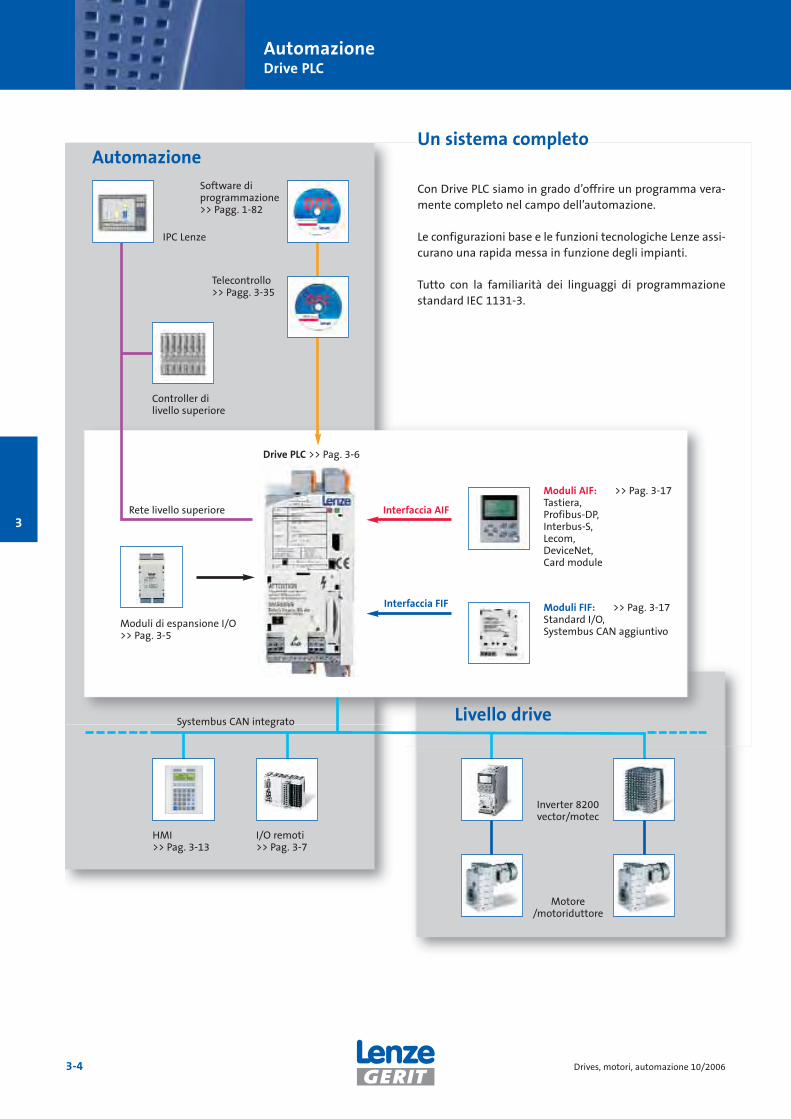
AutomazioneDrive PLC
3-4 Drives, motori, automazione 10/2006
3
Controller dilivello superiore
Moduli di espansione I/O>> Pag. 3-5
Rete livello superiore
Systembus CAN integrato
Motore/motoriduttore
Inverter 8200vector/motec
Livello drive
IPC Lenze
Software di programmazione>> Pagg. 1-82
Telecontrollo>> Pagg. 3-35
Moduli AIF: >> Pag. 3-17Tastiera, Profibus-DP, Interbus-S, Lecom, DeviceNet, Card module
Moduli FIF: >> Pag. 3-17Standard I/O, Systembus CAN aggiuntivo
Drive PLC >> Pag. 3-6
Interfaccia AIF
Interfaccia FIF
AutomazioneUn sistema completo
Con Drive PLC siamo in grado d’offrire un programma vera-mente completo nel campo dell’automazione.
Le configurazioni base e le funzioni tecnologiche Lenze assi-curano una rapida messa in funzione degli impianti.
Tutto con la familiarità dei linguaggi di programmazionestandard IEC 1131-3.
I/O remoti>> Pag. 3-7
HMI>> Pag. 3-13

AutomazioneDrive PLC
3-5Drives, motori, automazione 10/2006
3
Moduli d'Espansione I/O
Per incrementare il numero di ingressi ed uscite è possibileimpiegare un modulo di espansione opzionale da inserire conla massima semplicità e senza modificarne l'ingombro.
Modulo espansione 1Per il collegamento di sensori a 3-fili e l’alimentazione del fre-no a 24V:˘ 6 ingressi digitali, isolati˘ 4 uscite digitali, isolate, max. 1 A˘ 2 uscite digitali, isolate, max. 2 A˘ 5 morsetti per tensione +24 V e GND (per sensori a 3-fili)
Modulo espansione 2Per il collegamento di sensori e attuatori digitali:˘ 14 ingressi digitali, isolati˘ 8 uscite digitali, isolate, max. 1 A
Modulo espansione 3Per il conteggio veloce, misure di lunghezza e il controllo diposizione:˘ 1 ingresso encoder, TTL, HTL, 500 KHz˘ 8 ingressi digitali, isolati˘ 4 uscite digitali, isolate, max. 1 A˘ 2 ingressi analogici ± 10 V, 11-bit
Modulo FIF Standard I/O (pag. 3-29)Per il collegamento di sensori e attuatori digitali e analogici:˘ 4 ingressi digitali˘ 1 uscita digitale˘ 1 ingresso analogico ± 10 V o 4 ... 20 mA, 10-bit
Drive PLC e Inverter Lenze
Il Drive PLC in abbinamento agli inverter Lenze costituisce unperfetto esempio di azionamento decentrato. Sono disponibi-li numerosi moduli per differenti reti Bus e per l’ampliamentodi ingressi e uscite.
VantaggiIl Drive PLC comprende un proprio system Bus (CAN Open) epertanto non sono necessari ulteriori moduli addizionali. Inapplicazioni complesse il Drive PLC può essere impiegatoanche come interfaccia (gateway) tra una rete di inverter inCAN-Bus e altri bus (ProfiBus-DP, InterBus-S..) presenti nell'im-pianto.
Costi di ingegnerizzazione ridotti˘ Libreria software “embedded” per gestire facilmente gli
inverter Lenze tramite il programma del PLC. ˘ Funzioni tecnologiche complesse immediatamente
disponibili ˘ Semplice inserimento in reti Bus, innestando gli appositi
moduli d'automazione opzionali. ˘ Programmazione nel linguaggio più idoneo
all’applicazione attraverso la scelta tra i cinque linguaggiIEC 1131-3.
˘ Scelta tra task controllate su base temporale, eventi o cicliche.
˘ Massima semplicità di programmazione in conformità allenorme internazionali.

AutomazioneDrive PLC
3-6 Drives, motori, automazione 10/2006
3
Memoria programma 191 kB
Mememoria dati 2 settori da 64 kB + 11,3 kB (10 kB variabili simb. e 1,3 kB flag assoluti)
Memoria E2 prom 800 byte
Memoria rimanente 200 byte
Tipo di task 1 task ciclica, 8 tasks prioritari (su base temporale o su eventi)
Tempo di elaborazione 1,0 μs per operazione a bit
No. di contatori/timers Liberamente selezionabili come da IEC 1131
Ingressi digitali 8 (di cui 3 per interrupt)
Uscite digitali 4 (1 A ciascuna)
Espansioni I/O Con appositi moduli E82FAFS e EPZ-1020x e terminali remoti *
Ingressi analogici 3 (± 10 V, 11 bit)
Uscite analogiche 1 (± 10 V o ± 20 mA, 11 bit)
System bus standard (CAN open) anche per programmazione
Moduli d’automazione InterBus-S: EMF2113IB (per porta AIF)ProfiBus-DP: EMF2133IB (per porta AIF)Systembus (CAN): EMF2171IB (per porta AIF) E82ZAFC (per porta FIF)CanBus con indirizzo: EMF2172IB (per porta AIF)DeviceNet: EMF2175IB (per porta AIF)Lecom A/B RS232/485: EMF2102IB-V001 (per porta AIF)Lecom B RS485: EMF2102IB-V002 (per porta AIF)Lecom-LI fibra ottica: EMF2102IB-V003 (per porta AIF)Standard I/O E82FAFS (per porta FIF)
Dimensioni (A x L x P) / [mm] 120 x 60 x 140
Operatori disponibili Standard IEC 1131
Software di programmazione Drive PLC Developer Studio, con i linguaggi di programmazione: lista istruzioni, ladder, testo strutturato, blocchi funzione, diagrammi sequenziali con simulazione, debug, monitoraggio e visualizzazione
* Via Systembus CAN** Moduli opzionali ad innesto frontale ampiamente descritti alla fine di questa sezione.
Caratteristiche

AutomazioneI/O decentrabili
Le soluzioni lenze comprendono due famiglie diprodotti, con protezione IP20, ideali sia per leesigenze più semplici, sia per le applicazionicomplesse:
Unità compatteSistema modulare
Seguendo il principio Lenze “one stop shopping” è possibilerealizzare soluzioni su misura dove tutti i componenti diautomazione sono perfettamente integrati fra loro. Le solu-zioni Lenze comprendono un’ampia gamma di hardwarecaratterizzato dalla massima semplicità di configurazione,tramite il software Global Drive Control.
Sistema modulare
Il sistema modulare è basato su tre elementi fondamentaliche assicurano la massima personalizzazione e le miglioriprestazioni di comunicazione.
˘ Gateway: è l’elemento chiave che permette d’interfacciareil sistema I/O al systembus CAN di Lenze, tramite unconnettore SUB-D. I collegamenti di alimentazione e disegnale utilizzano il pratico sistema a molla.Modello unico EPM-T110 per gestire fino a 32 moduli.
˘ Elementi di collegamento ad innesto, sono indispensabiliper il collegamento tra i moduli elettronici ed il gateway,realizzando unità molto compatte.
I/O decentrabili soluzioni ideali per ogni esigenza
I/O compatti
I/O modulari
˘ Moduli elettronici composti da 10 modelli di I/O digitalied analogici, contatori ed un’intefaccia SSI. Tutti i modulisono predisposti per l’installazione su guida DIN. In casodi ampliamento, di modifica della configurazione o perassistenza, le morsettiere estraibili in dotazioneassicurano tempi minimi d’intervento.
I/O modulari
3-7Drives, motori, automazione 10/2006
3

AutomazioneI/O decentrabili
3-8 Drives, motori, automazione 10/2006
3
Tipo Gateway CAN
Dati elettrici
Tensione nominale DC 24 V (-15% / +20%)
Intefaccia CAN-Bus
connettore 9-poli SUB-D
Velocità comunicazione 10 kBps fino a 1 MBps
Numero di nodi max. 63
Dimensioni
L x h x p [mm] 25,4 x 76 x 76
Codice d’ordine EPM-T110
Gateway
Sistema modulare
Moduli ingressi/uscite digitali
Tipo Collegamento posteriore
Codice d’ordine EPM-T910 (per 1 modulo)EPM-T911 (per 2 moduli)EPM-T912 (per 4 moduli)EPM-T913 (per 8 moduli)
Elementi di collegamento*
Tipo 8 x ingressi digitali 16 x ingressi digitali 8 x uscite digitali 1 A
Dati elettrici
N° di ingressi / uscite 8/– 16/– –/8
Tensione nominale ingressi 24 VDC (18 ... 28,8 VDC) 24 VDC (18 ... 28,8 VDC) –
Tensione nominale uscite – – VDC 24 V (18 ... 35 VDC)
Tensione segnale 0/1 0 ... 5 VDC / 15 ... 30 VDC 0 ... 5 VDC / 15 ... 30 VDC –
Corrente in uscita per canale – – 1 A
Dimensioni
L x h x p [mm] 25,4 x 76 x 76 25,4 x 76 x 76 25,4 x 76 x 76
Codice d’ordine EPM-T210 EPM-T211 EPM-T220
* Gli elementi di collegamento ad innesto posteriore sonoindispensabili per collegare i moduli al gateway e possono esserecombinati fra loro. Ad esempio, per collegare sei moduli I/O ad ungateway occorre impiegare un elemento EPM-T911 e un EPM-T912

AutomazioneI/O decentrabili
3-9Drives, motori, automazione 10/2006
3
Tipo 4 x ingressi analogici 4 x uscite analogiche 4 x ingressi/uscite analogici
Dati elettrici
N° di ingressi / uscite 4 oppure 2 fili / – – / 4 2 / 2
Dati tecnici ingressi/uscite
Tensione ±10 VDC, ±4 VDC, ±400 mVDC, ±10 VDC, 0 ... 10 VDC, 1 ... 5 VDC 0 ... 10 VDC, ±10 VDC, 1 ... 5 VDC
0 ... 50 mVDC
Corrente 4 ... 20 mA, ±20 mA 0 / 4 ... 20 mA, ±20 mA 0 / 4 ... 20 mA, ±20 mA
Temperatura PT100, PT1000, NI100, NI1000 – –
Termoelemento J, K, N, R, S, T – –
Dimensioni
L x h x p [mm] 25,4 x 76 x 76 25,4 x 76 x 76 25,4 x 76 x 76
Codice d’ordine EPM-T310 EPM-T320 EPM-T330
Moduli ingressi/uscite analogici
Sistema modulare
8 x uscite digitali 2 A 4 x uscite relé 16 x uscite digitali 1 A 8 x ingressi/uscite digitali
–/8 –/4 via relé – / 16 0 ... 8 / 8 ... 0 (n° totale canali: 8)
– – – 24 VDC (18...35 VDC)
24 VDC (18 ... 35 VDC) 230 VAC oppure max. 30 VDC 24 V VDC (18 ... 35 VDC) 24 VDC (18 ... 35 VDC)
– – – 0 ... 5 VDC / 15 ... 30 VDC
2 A (corrente totale max 10 A) 230 VAC: 5 A; 30 VDC: 5 A 1 A (corrente totale max 10 A) 1 A
25,4 x 76 x 76 25,4 x 76 x 76 25,4 x 76 x 76 25,4 x 76 x 76
EPM-T221 EPM-T222 EPM-T223 EPM-T230

AutomazioneI/O decentrabili
3-10 Drives, motori, automazione 10/2006
3
Tipo 2 / 4 x contatore
Dati elettrici
N° contatori 2/4 (32/16 Bit)
Modalità operativa Incremento/decrementoComparazione/funz. auto resetImpulsi encoderMisurazione durata periodoMisurazione frequenza
Frequenza di conteggio 1 MHz
Dimensioni
L x h x p [mm] 25,4x76x76
Codice d’ordine EPM-T410
Tipo SSI-Interface
Dati elettrici
N° canali 1
Ingressi/uscite
Quantità 2, parametrizzabili
Tensione segnale 0/1 -5 ... 7 V DC/ 13 ... 36 V DC
Dimensioni
L x h x p [mm] 25,4x76x76
Codice d’ordine EPM-T411
Moduli funzione
Tipo 1 x contatore/16 x ingressi digitali
Dati elettrici
N° contatori 1 (risoluzione 32 Bit)
Modalità operativa Incremento/decrementoImpulsi encoderMisurazione durata periodoMisurazione frequenza
Frequenza di conteggio 100 kHz
N° ingressi/uscite 16 / –
Tensione nominale DC 24 V (18 ... 28,8 V)
Tensione segnale 0/1 DC 0 ... 5 V / DC 15 ... 30 V
Dimensioni
L x h x p [mm] 25,4x76x76
Codice d’ordine EPM-T430
Sistema modulare
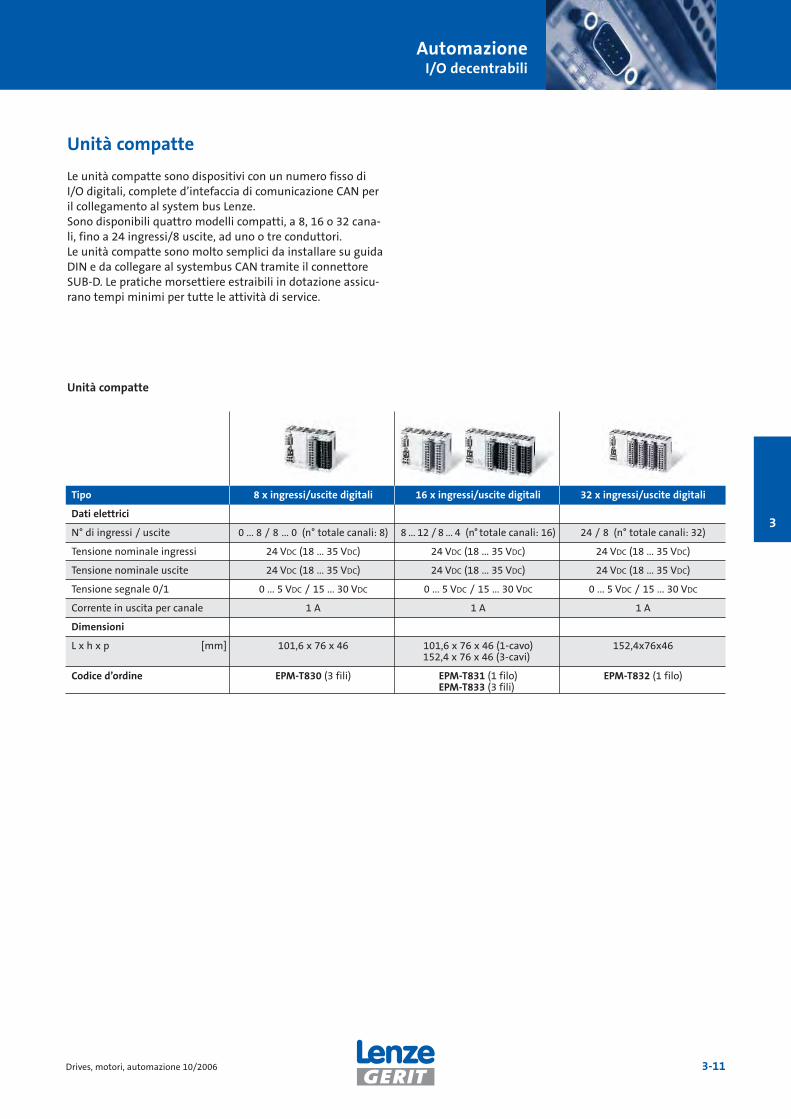
AutomazioneI/O decentrabili
3-11Drives, motori, automazione 10/2006
3
Unità compatte
Tipo 8 x ingressi/uscite digitali 16 x ingressi/uscite digitali 32 x ingressi/uscite digitali
Dati elettrici
N° di ingressi / uscite 0 ... 8 / 8 ... 0 (n° totale canali: 8) 8 ... 12 / 8 ... 4 (n° totale canali: 16) 24 / 8 (n° totale canali: 32)
Tensione nominale ingressi 24 VDC (18 ... 35 VDC) 24 VDC (18 ... 35 VDC) 24 VDC (18 ... 35 VDC)
Tensione nominale uscite 24 VDC (18 ... 35 VDC) 24 VDC (18 ... 35 VDC) 24 VDC (18 ... 35 VDC)
Tensione segnale 0/1 0 ... 5 VDC / 15 ... 30 VDC 0 ... 5 VDC / 15 ... 30 VDC 0 ... 5 VDC / 15 ... 30 VDC
Corrente in uscita per canale 1 A 1 A 1 A
Dimensioni
L x h x p [mm] 101,6 x 76 x 46 101,6 x 76 x 46 (1-cavo) 152,4x76x46152,4 x 76 x 46 (3-cavi)
Codice d’ordine EPM-T830 (3 fili) EPM-T831 (1 filo) EPM-T832 (1 filo)EPM-T833 (3 fili)
Unità compatte
Le unità compatte sono dispositivi con un numero fisso diI/O digitali, complete d’intefaccia di comunicazione CAN peril collegamento al system bus Lenze. Sono disponibili quattro modelli compatti, a 8, 16 o 32 cana-li, fino a 24 ingressi/8 uscite, ad uno o tre conduttori.Le unità compatte sono molto semplici da installare su guidaDIN e da collegare al systembus CAN tramite il connettoreSUB-D. Le pratiche morsettiere estraibili in dotazione assicu-rano tempi minimi per tutte le attività di service.
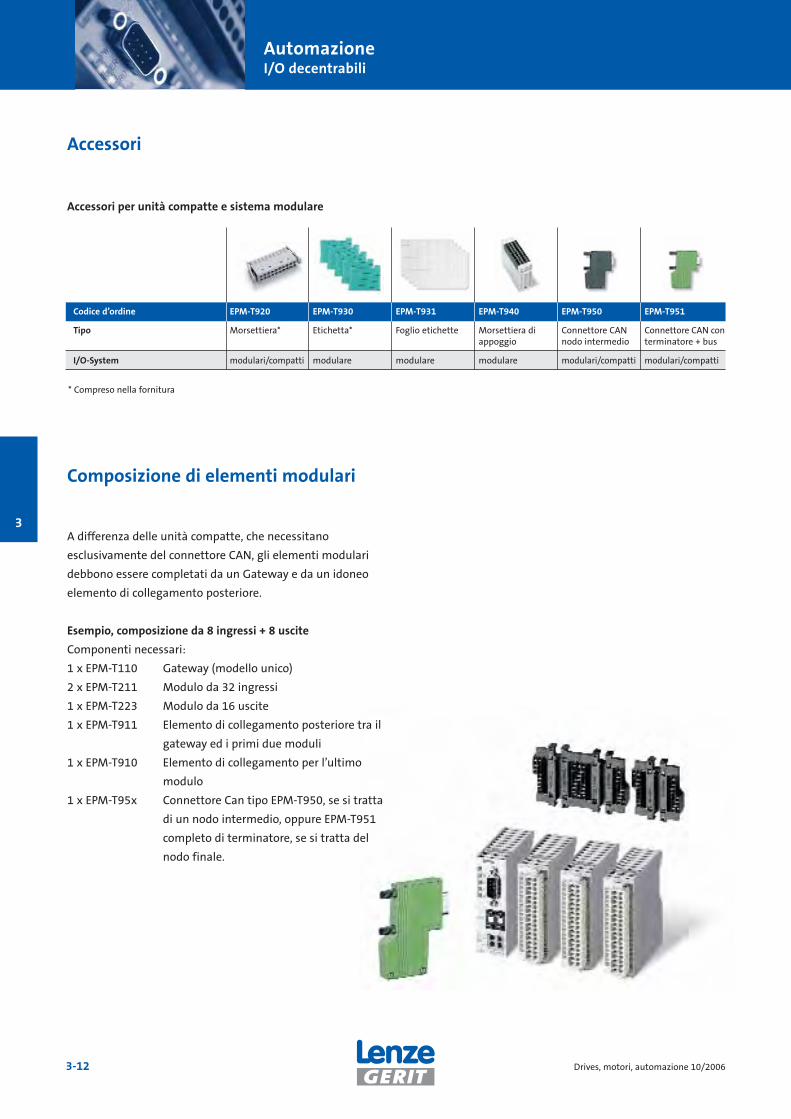
AutomazioneI/O decentrabili
3-12 Drives, motori, automazione 10/2006
3
Codice d’ordine EPM-T920 EPM-T930 EPM-T931 EPM-T940 EPM-T950 EPM-T951
Tipo Morsettiera* Etichetta* Foglio etichette Morsettiera di Connettore CAN Connettore CAN conappoggio nodo intermedio terminatore + bus
I/O-System modulari/compatti modulare modulare modulare modulari/compatti modulari/compatti
Accessori per unità compatte e sistema modulare
* Compreso nella fornitura
Accessori
Composizione di elementi modulari
A differenza delle unità compatte, che necessitano
esclusivamente del connettore CAN, gli elementi modulari
debbono essere completati da un Gateway e da un idoneo
elemento di collegamento posteriore.
Esempio, composizione da 8 ingressi + 8 uscite
Componenti necessari:
1 x EPM-T110 Gateway (modello unico)
2 x EPM-T211 Modulo da 32 ingressi
1 x EPM-T223 Modulo da 16 uscite
1 x EPM-T911 Elemento di collegamento posteriore tra il
gateway ed i primi due moduli
1 x EPM-T910 Elemento di collegamento per l’ultimo
modulo
1 x EPM-T95x Connettore Can tipo EPM-T950, se si tratta
di un nodo intermedio, oppure EPM-T951
completo di terminatore, se si tratta del
nodo finale.

AutomazioneTerminali operatore
3-13Drives, motori, automazione 10/2006
3
I terminali operatore Lenze integrano la gamma dei prodottiper l'automazione e si distinguono per la loro qualità e le alteprestazioni. La loro perfetta integrazione nel sistema ne sem-plifica l’inserimento in ogni progetto.Studiati sulle esigenze pratiche degli operatori di macchineed impianti, questi terminali sono particolarmente intuitivi,funzionali ed economici. La gamma di HMI Lenze è moltoampia e spazia dai display di testo fino ai touchscreen ad altarisoluzione
Terminali HMI
˘ Visualizzazione di testi, figure, grafici a barre e trend,immagini bitmap e grafici animati*
˘ Gestione ricette*˘ Livelli di password per protezione dei dati da accessi non
autorizzati˘ Visualizzazione messaggi di sistema˘ Visualizzazione messaggi di allarme*˘ Stampa pagine*˘ Comunicazione con System Bus (CANopen)˘ Tasti funzione liberamente programmabili. Possibilità di
etichettare singolarmente i tasti tramite insertisostituibili*
˘ Memory card aggiornamento progetto e salvataggio dati*˘ Configurabili tramite software semplice˘ Software di programmazione in due lingue
* funzione presente solo in alcuni modelli

AutomazioneTerminali operatore
3-14 Drives, motori, automazione 10/2006
3
H310 H312 H315
Display
Tipologia Display testo LCD retroilluminato a LED
Linee x caratteri 2 x 20 4 x 20 4 x 20
Dimensioni caratteri [mm] 3.2 x 5.5 2.95 x 4.75 2.95 x 4.75
Memoria
Memoria programma 48 kB 256 kB 256 kB
Dimensioni
Esterne (L x h x p) [mm] 166 x 86 x 45 166 x 86 x 45 148 x 188 x 45.5
Foro d’installazione (L x h) [mm] 157 x 77 157 x 77 123 x 175
Dati tecnici
Protezione IP65 (pannello frontale) IP65 (pannello frontale) IP65 (pannello frontale)
Codice d’ordine EPM-H310 EPM-H312 EPM-H315
Display di testo
Touch screen
H502 H505 H507
Dati elettrici
Tipologia Display grafico LCD in scala di grigio Display grafico LCD in scala di blu Display grafico LCD a 16 coloriSTN 4’’ STN 5.6’’
Matrice touchscreen 20 x 8 20 x 16 20 x 16
Risoluzione (pixel) 240 x 128 320 x 240 320 x 240
Memoria
Memoria programma 640 kB 640 kb 960 kB
Dimensioni
Esterne (L x h x p) [mm] 166 x 100 x 43.6 210 x 158 x 60 210 x 158 x 60
Foro d’installazione (l x h) [mm] 157 x 91 198 x 148 198 x 148
Dati tecnici
Protezione IP65 (pannello frontale) IP65 (pannello frontale) IP65 (pannello frontale)
Codice d’ordine EPM-H502 EPM-H505 EPM-H507
Memoria aggiuntiva (codice) – – –
Caratteristiche

AutomazioneTerminali operatore
3-15Drives, motori, automazione 10/2006
3
H410
Display
Tipologia Display grafico LCDretroilluminato a LED
Linee x caratteri 8 x 40/4 x 20/2 x 10
Risoluzione (pixel) 240 x 64
Memoria
Memoria programma 512 kB
Dimensioni
Esterne (L x h x p) [mm] 256 x 196 x 65
Foro d’installazione (L x h) [mm] 232 x 178
Dati tecnici
Protezione IP65 (pannello frontale)
Codice d’ordine EPM-H410
Memoria aggiuntiva (codice) 4 MB (EPZ-H210)
Display grafici A consolle
H605
Display
Tipologia Display grafico LCD a scala di bluSTN 5.6’’
Matrice touchscreen 20 x 16
Risoluzione (pixel) 320 x 240
Memoria
Memoria programma 640 kB
Dimensioni
Esterne (L x h x p) [mm] 286 x 284 x 97
Dati tecnici
Protezione IP65 (pannello frontale)
Codice d’ordine EPM-H605
H510 H515 H520 H521
Display grafico LCD monocromatico Display grafico LCD a 256 colori Display grafico LCD a 256 colori Display grafico LCD a 256 coloriSTN 5.5’’ STN 7,5’’ STN 10.4’’ 10.4’’
20 x 8 40 x 30 40 x 30 40 x 30
240 x 128 640 x 480 640 x 480 640 x 480
512 kb 960 kb 640 kb 960 kb
210 x 158 x 60 245,9 x 188.6 x 43.6 346 x 260 x 79 336.3 x 256.0 x 50.0
198 x 148 233 x 176 314 x 240 314 x 240
IP65 (pannello frontale) IP65 (pannello frontale) IP65 (pannello frontale) IP65 (pannello frontale)
EPM-H510 EPM-H515 EPM-H520 EPM-H521
– – 4 MB (EPZ-H220) 8 MB (EPZ-H221)

AutomazioneTerminali operatore
3-16 Drives, motori, automazione 10/2006
3
HMI Designer
Grazie alla semplice struttura dell’ambiente di programma-zione e all'ottimale combinazione con gli azionamenti Lenze,preparare un applicativo per i pannelli operatore HMI è sem-plice quanto il loro successivo utilizzo. Tutti i terminali posso-no naturalmente essere programmati con lo stesso software e
i progetti compilati possono esser trasferiti ai diversi termina-li.E’ facilissimo rappresentare testi, grafici a barre, immagini bit-map e animate o stampare quanto viene visualizzato suldisplay.
Requisiti hardware:• PC IBM-compatibile (Pentium 166 MHz o superiore)• 32 MB (RAM)• 100 MB liberi su disco fisso• scheda grafica VGA• mouse Microsoft-compatibile • drive CD ROM • interfaccia seriale libera per comunicazione con i pannelli
Requisiti software:• Windows 95/98//NT 4.0 SP5 (SP3 o sup.)/2000/XP
Codice di ordine: ESP-HMI1-P

AutomazioneModuli d’automazione
3-17Drives, motori, automazione 10/2006
3
La versatilità è un fiore all’occhiello delle apparecchiature Len-ze. Non solo i drive, ma anche i PLC Lenze, dispongono di una opiù porte seriali, in grado di accettare una grande varietà didispositivi standard, di facile installazione: tastiera, moduli di
Porte disponibili
Moduli d'automazione
➀ Oltre alla porta FIF, è presente una porta aggiuntiva di messa in servizio per tastiera o interfaccia RS232 (Lecom-A) con impugnatura palmare. ➁ Con systembus CAN integrato di serie.* Disponibile solo per standard I/O o CAN aggiuntivo.
interfacciamento a bus di campo e moduli di ampliamentoingressi ed uscite. Questi moduli sono disponibili in versioneper porta FIF o per porta AIF e possono essere installati in com-binazione fra loro.
Porta 8200 vector 8200 motec Starttec 9300 vector 9300 servo 9300 servo ECS servo Drive PLC0,25...11 kW 15...90 kW ➀ ➀ ➁ PLC ➁ ➁ ➁ ➁
FIF 1 2 2 1 – – – – 1*
AIF 1 1 – – 1 1 1 1 1
Tastiera Lecom AB Lecom LI
Intefaccia AIFmoduli
InterBus-S CAN
ProfiBus-DP DeviceNet
8200 motec
Starttec
9300 vector,9300 servo,9300 servo PLC,Servo ECS
8200 vector > 11 kW
8200 vector < 11kW,Drive PLC
Intefaccia FIFmoduli
Profibus-DP Profibus I/O InterBus-S
Standard I/O Application I/O Bus I/O
CANopen CAN I/O DeviceNet
ASi Lecom LI Lecom A/B
Tastiera
Interfaccia per tastiera o RS232
con impugnatura palmare
Lecom A RS232
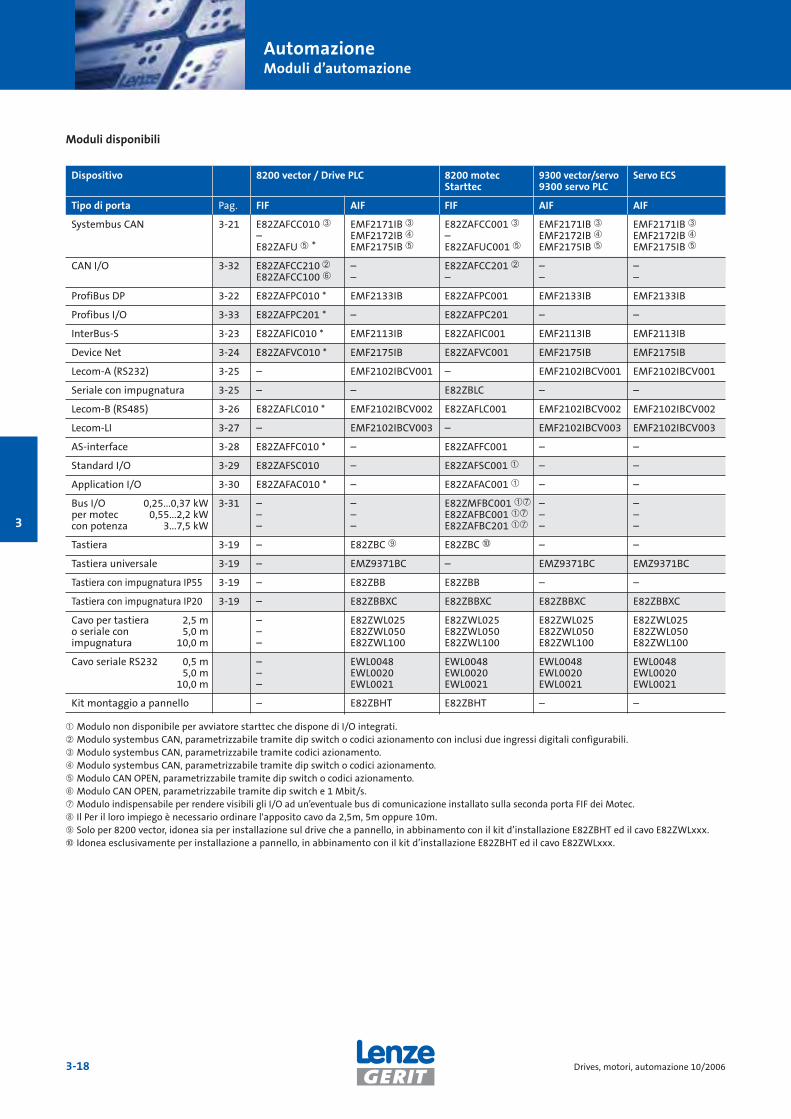
AutomazioneModuli d’automazione
3-18 Drives, motori, automazione 10/2006
3
Dispositivo 8200 vector / Drive PLC 8200 motec 9300 vector/servo Servo ECSStarttec 9300 servo PLC
Tipo di porta Pag. FIF AIF FIF AIF AIF
Systembus CAN 3-21 E82ZAFCC010 ➂ EMF2171IB ➂ E82ZAFCC001 ➂ EMF2171IB ➂ EMF2171IB ➂– EMF2172IB ➃ – EMF2172IB ➃ EMF2172IB ➃E82ZAFU ➄ * EMF2175IB ➄ E82ZAFUC001 ➄ EMF2175IB ➄ EMF2175IB ➄
CAN I/O 3-32 E82ZAFCC210 ➁ – E82ZAFCC201 ➁ – –E82ZAFCC100 ➅ – – – –
ProfiBus DP 3-22 E82ZAFPC010 * EMF2133IB E82ZAFPC001 EMF2133IB EMF2133IB
Profibus I/O 3-33 E82ZAFPC201 * – E82ZAFPC201 – –
InterBus-S 3-23 E82ZAFIC010 * EMF2113IB E82ZAFIC001 EMF2113IB EMF2113IB
Device Net 3-24 E82ZAFVC010 * EMF2175IB E82ZAFVC001 EMF2175IB EMF2175IB
Lecom-A (RS232) 3-25 – EMF2102IBCV001 – EMF2102IBCV001 EMF2102IBCV001
Seriale con impugnatura 3-25 – – E82ZBLC – –
Lecom-B (RS485) 3-26 E82ZAFLC010 * EMF2102IBCV002 E82ZAFLC001 EMF2102IBCV002 EMF2102IBCV002
Lecom-LI 3-27 – EMF2102IBCV003 – EMF2102IBCV003 EMF2102IBCV003
AS-interface 3-28 E82ZAFFC010 * – E82ZAFFC001 – –
Standard I/O 3-29 E82ZAFSC010 – E82ZAFSC001 ➀ – –
Application I/O 3-30 E82ZAFAC010 * – E82ZAFAC001 ➀ – –
Bus I/O 0,25...0,37 kW 3-31 – – E82ZMFBC001 ➀➆ – –per motec 0,55...2,2 kW – – E82ZAFBC001 ➀➆ – –con potenza 3...7,5 kW – – E82ZAFBC201 ➀➆ – –
Tastiera 3-19 – E82ZBC ➈ E82ZBC ➉ – –
Tastiera universale 3-19 – EMZ9371BC – EMZ9371BC EMZ9371BC
Tastiera con impugnatura IP55 3-19 – E82ZBB E82ZBB – –
Tastiera con impugnatura IP20 3-19 – E82ZBBXC E82ZBBXC E82ZBBXC E82ZBBXC
Cavo per tastiera 2,5 m – E82ZWL025 E82ZWL025 E82ZWL025 E82ZWL025o seriale con 5,0 m – E82ZWL050 E82ZWL050 E82ZWL050 E82ZWL050impugnatura 10,0 m – E82ZWL100 E82ZWL100 E82ZWL100 E82ZWL100
Cavo seriale RS232 0,5 m – EWL0048 EWL0048 EWL0048 EWL00485,0 m – EWL0020 EWL0020 EWL0020 EWL0020
10,0 m – EWL0021 EWL0021 EWL0021 EWL0021
Kit montaggio a pannello – E82ZBHT E82ZBHT – –
Moduli disponibili
➀ Modulo non disponibile per avviatore starttec che dispone di I/O integrati.➁ Modulo systembus CAN, parametrizzabile tramite dip switch o codici azionamento con inclusi due ingressi digitali configurabili.➂ Modulo systembus CAN, parametrizzabile tramite codici azionamento.➃ Modulo systembus CAN, parametrizzabile tramite dip switch o codici azionamento.➄ Modulo CAN OPEN, parametrizzabile tramite dip switch o codici azionamento.➅ Modulo CAN OPEN, parametrizzabile tramite dip switch e 1 Mbit/s.➆ Modulo indispensabile per rendere visibili gli I/O ad un’eventuale bus di comunicazione installato sulla seconda porta FIF dei Motec. ➇ Il Per il loro impiego è necessario ordinare l'apposito cavo da 2,5m, 5m oppure 10m.➈ Solo per 8200 vector, idonea sia per installazione sul drive che a pannello, in abbinamento con il kit d’installazione E82ZBHT ed il cavo E82ZWLxxx.➉ Idonea esclusivamente per installazione a pannello, in abbinamento con il kit d’installazione E82ZBHT ed il cavo E82ZWLxxx.

Tastiera estraibile
Tutte le apparecchiature Lenze sono fornite preconfigurate“pronte all’uso” per rispondere alle esigenze delleapplicazioni più comuni. Per personalizzare la configurazione dei drive ed ottimizzarliper specifiche esigenze applicative, è possibile impiegare:
˘ Tastiera estraibile, la scelta più semplice ed economica.˘ PC con software Global Drive Control, tramite modulo
seriale RS232/485 o via bus di campo.
AutomazioneModuli d’automazione
3-19Drives, motori, automazione 10/2006
3
Tastiera Software GDC (Global Drive Control)
Collegamento Diretto Via seriale Via CAN, tramite interfaccia CAN/Usb,tramite modulo RS232/485 oppure via bus di campo
Funzioni • Impostare i parametri di funzionamento• Comandare l'inverter (es. arresto, partenza)• Visualizzare dati di funzionamento• Selezionare valori nominali • Trasferire le impostazioni dei parametri ad altri inverter
Tipologia Codice tastiera Compatibilità Accessori necessari codice
Installazione sul drive E82ZBC 8200 vector –
EMZ9371BC tutti i dispositivi Lenze –
Installazione a pannello E82ZBC 8200 vector, motec, starttec kit installazione E82ZBHTcavo di collegamento da 2,5 m E82ZWL025cavo di collegamento da 5 m E82ZWL050cavo di collegamento da 10 m E82ZWL100
Con impugnatura palmare IP55 E82ZBB 8200 vector, motec, starttec cavo di collegamento da 2,5 m E82ZWL025cavo di collegamento da 5 m E82ZWL050
Con impugnatura palmare IP20 E82ZBBXC tutti i dispositivi Lenze cavo di collegamento da 10 m E82ZWL100
TastieraLa tastiera costituisce la scelta più semplice, economica edoffre numerosi vantaggi: ˘ La tastiera dispone di una memoria non volatile per
mantenere in memoria le impostazioni dei parametrianche in assenza di corrente. La tastiera consente ditrasferire con la massima semplicità, rapidità e sicurezza, iparametri da un inverter all’altro.
˘ La messa in funzione dell’azionamento può essererealizzata direttamente dalla tastiera.
˘ La tastiera può essere anche installata direttamente suldrive oppure a pannello, in combinazione con l’apposito kited un cavo di collegamento, da ordinare a parte.
˘ La tastiera è anche disponibile in versione conimpugnatura palmare. Il cavo di collegamento deve essereordinato a parte.
8888888
-88.8.88
0.7 Nm
45
3.
45 3.
Pannello
Kit d’installazioneE82ZBHT Tastiera E82ZBC
Kit d’installazione a pannello

AutomazioneModuli d’automazione
3-20 Drives, motori, automazione 10/2006
3
Profibus DP CAN Interbus (remote bus) Lecom-B (RS485) DeviceNet
Tipologia Linea con resistenze Linea con resistenze Struttura ad anello Linea con resistenze Linea con resistenzedi terminazione di terminazione con dispositivi attivi di terminazione di terminazione
d'accoppiamento
Massimo numero 32 per segmento, Lenze: 63 Lenze: 63 32 63dispositivi tot: 125 (4 segmenti ISO11898: 128collegabili con 3 ripetitori) limitato dalla
I ripetitori sono potenza del busconsiderati dispositivi! driver
Distanza massima 1.2 km Fino a 1000 m 13 km 1000 m (dipende Fino a 1000 ma 93.75 kbit/s (dipende dalla con cavi in rame. dal tipo di cavo (dipende dalla200 m velocità di 100 km impiegato) velocità dia 1.5 Mbit/s trasmissione) con fibra ottica trasmissione)100 m a 12 Mbit/s
Distanza massima Fino a 1.2 km 1 km 400 m 1000 m 500 mfra i dispositivi (dipende dal tipo (senza ripetitori) di cavo impiegato)
Mezzo di Doppino schermato Doppino schermato 2 x STP (Doppino, Doppino schermato Doppino schermatotrasmissione oppure fibra ottica schermato) oppure
fibra ottica
Alimentazione No Separata, tramite con linea addizionale Possibile con Con alimentazione ausiliaria per conduttori ausiliari nel cavo (installazione linea addizionale addizionale nella dispositivi via bus nel cavo bus bus remoto) linea CAN
Protocollo RS485 ISO 11898, RS485 (422) 4 fili RS485 DIN ISO 11898di trasmissione ISO 11518-2,
ISO DIS 11993,
Velocità di 9.6 kbit/s fino a 20 kbit/s fino a 500 kbit/s AIF: 19.2 kbaud 500 kbaudtrasmissione 12 Mbit/s 1 Mbit/s FIF: 57.6 kbaud
Standardizzazione EN 50170 ISO 11898 DIN E 19 258 EN 50325DIN 19245, parte 3 e CiA DS 301 EN 50254
in preparazione(come supplementoa EN 5 170)
Caratteristiche dei bus
Moduli di Comunicazione/Bus
Grazie a questa vasta gamma di moduli di comunicazione èpossibile integrare i prodotti Lenze nella rete bus più idonea.
˘ CAN ˘ CANopen˘ Interbus-S ˘ AS-interface˘ Profibus-DP ˘ LECOM-A RS232˘ LECOM-B RS485 ˘ LECOM-LI RS232/485 a fibra ottica

AutomazioneModuli d’automazione
3-21Drives, motori, automazione 10/2006
3
System bus (CAN)
Il System bus (CAN) è impiegato per comunicare fra differentidispositivi Lenze. Esso consente un semplice e rapido collega-mento fra numerosi inverter o altri componenti compatibili.
Tutti i dispositivi serie 9300, Servo PLC e Drive PLC sono fornitidi system bus CAN integrato
Il modulo CAN è in grado d’offrire funzionalità, per esempio:˘ configurazione parametri da unità esterne˘ scambio dati da inverter a inverter˘ interfacciamento a controlli esterni e sistemi di controllo ˘ possibilità di collegamento ad I/O decentralizzati ed a
terminali operatore HMI
Tipo di porta FIF AIF
Modulo di comunicazione tipo E82ZAFCC001, E82ZAFCC010 ➀ EMF2171IB➀, EMF2172IB➁
Velocità di trasmissione [k Bit/s] 10 20 50 125 250 500 1000 10 20 50 125 250 500 1000
Distanza massima [m] – 3910 1510 590 250 80 – – – 1550 630 290 120 25
Modulo di comunicazione tipo E82ZAFUC001, E82ZAFUC010 ➂ EMF2175IB➂
Velocità di trasmissione [k Bit/s] 10 20 50 125 250 500 1000 10 20 50 125 250 500 1000
[m] 7434 3934 1534 614 274 104 9 7450 3950 1550 630 290 120 25
Protocollo basato su CAN open (CAL profilo di comunicazione DS301)
Profilo di comunicazione DIN ISO 11898
Tipologia della rete linea (terminata su entrambi i lati con una resistenza da 120 Ω)
Numero di canali dati 2 1 - 3➃
Numero di canali parametro 2 2
Numero max dispositivi collegabili 63 63
Tipologia del dispositivo master o slave master o slave
Distanza max. fra 2 dispositivi non influente, dipende dalla lunghezza complessiva del bus
Collegamenti elettrici morsetti a vite morsetti a vite sfilabiliCINH = controllore inibito
Alimentazione esterna DC ➄ [VDC] solo interna 24 V ± 10%[mADC] - 70 (100➂) mA max per modulo
Tensione d’isolamento a PE [VAC] 50 50
Temperatura di funzionamento [°C] -20° ... +60° 0° ... +55°di trasporto [°C] -25° ... +70° -25° ... +70°
di stoccaggio [°C] -25° ... +60° -25° ... +60°
Condizioni ambientali classe 3K3 secondo EN 50178 (umidità relativa 85%, senza condensa)
➀ Moduli systembus CAN, parametrizzabile tramite codici azionamento.➁ Moduli systembus CAN, parametrizzabile tramite dip switch o codici azionamento.➂ Modulo CANopen, parametrizzabile tramite dip switch o codici azionamento.➃ 3 canali disponibili solo con Drive PLC o Servo PLC impiegando il modulo EMF2175IB.➄ Il modulo è normalmente alimentato dall'apparecchiatura sulla quale è installato. L'alimentazione esterna è possibile ed è necessaria se il
collegamento deve essere mantenuto attivo in caso di guasto o di spegnimento del partecipante.
EMF2171IB EMF2175IBE82ZAFUC010E82ZAFCC001

AutomazioneModuli d’automazione
3-22 Drives, motori, automazione 10/2006
3
➀ 12 word disponibili solo con Drive PLC o Servo PLC.➁ Il modulo è normalmente alimentato dall'apparecchiatura sulla quale è installato. L'alimentazione esterna è possibile ed è necessaria se il
collegamento deve essere mantenuto attivo in caso di guasto, di spegnimento del partecipante oppure in presenza di dispositivi non alimentati, dotati diresistenze di terminazione.
* Non ancora disponibili per Drive PLC
Tipo di porta FIF AIF
Modulo di comunicazione tipo E82ZAFPC0001, E82ZAFPC010* EMF2133IB
Comunicazione tramite RS485 RS485
Profilo di comunicazione PROFIBUS DP (DIN 19245 parte 1 e parte 3)
Profilo selezionabile DRIVECOM profilo Power Transmission 20 DRIVECOM profilo Power Transmission 20Lenze device control Lenze device control
– PROFIDRIVE
Velocità di trasmissione [k Bit/s] 9.6 ... 12000 con adeguamento automatico
Tipologia del dispositivo Slave Slave
Tipologia della rete Senza ripetitori: lineaCon ripetitori: linea o albero
Numero max dispositivi collegabili standard 32 (= 1 segmento bus) 32 (= 1 segmento bus)con ripetitori 125 (con i ripetitori) 125 (con i ripetitori)
Numero data words di processo (PCD) 16-bit 1 ... 10 1 ... 4/12 ➀
Lunghezza dati utente DP canale parametri (4 words) + words di processo dati
Lunghezza max cavi per segmento bus [m] 1000 m (dipende dalla velocità di trasmissione e dal tipo di cavo)
Collegamenti elettrici morsetti a vite Sub-D 9-poleCINH = controllore inibito
Alimentazione esterna DC ➁ [VDC] 24 V ± 10% 24 V ± 10%[mADC] 80 mA max per modulo 120 mA max per modulo
Tensione d’isolamento a PE [VAC] 50 50
Temperatura di funzionamento [°C] -20° ... +60° 0° ... +55°di trasporto [°C] -25° ... +70° -25° ... +70°
di stoccaggio [°C] -25° ... +60° -25° ... +60°
Condizioni ambientali classe 3K3 secondo EN 50178 (umidità relativa 85%, senza condensa)
ProfiBus-DP
Il modulo ProfiBus è un componente slave del profilo di comu-nicazione ProfiBus DP. Esso è impiegato per collegare l’inverteral dispositivo di controllo per elevate velocità di processo. Que-sto permette una conveniente integrazione dell’inverter nellarete.
EMF2133IBE82ZAFPC001 E82ZAFPC010

AutomazioneModuli d’automazione
3-23Drives, motori, automazione 10/2006
3
InterBus-S
Modulo INTERBUS collegabile direttamente al bus remoto. Il profilo DRIVECOM 20 o 21 è supportato durante l’interfac-ciamento. Il modulo può essere alimentato separatamente a24 VDC.
Tipo di porta FIF AIF
Modulo di comunicazione tipo E82ZAFIC001, E82ZAFIC010* EMF2113IB
Comunicazione tramite RS485 RS485
Profilo selezionabile Lenze device control Lenze device controlDRIVECOM profilo “power trans. 20” DRIVECOM profilo “power trans. 21”
Velocità di trasmissione [k Bit/s] 500 500/1000
Tipologia del dispositivo slave slave
Tipologia della rete anello (andata e ritorno col medesimo cavo bus)
Numero data words di processo (PCD) 16-bit 1 ... 6 2 ... 3 (**)
Numero data words di parametri (PCP) 16-bit 0/1 max 4
Codice InterBus (ID-Code) decimale 227 o 3 (senza PCP) decimale 227 hex: E3 o 3 (senza PCP) hex: E3
max. PDU length [bytes] 64 64
Servizi PCP supportati inizializzazione, abort, stato, identificazione, get-OV-long, leggi, scrivi
Numero max dispositivi collegabili max. 63, dipende dal sistema master (I/O area),
Lunghezza max cavi per segmento bus [m] 400 400
Collegamenti elettrici morsetti a vite morsetti a vite e connettoriCINH = controllore inibito
Alimentazione esterna DC ➀ [VDC] 24 V ± 10% 24 V ± 10%[mADC] 90 mA max per modulo 100 mA max per modulo
Tensione d’isolamento a PE [VAC] 50 50
Temperatura di funzionamento [°C] -20° ... +60° 0° ... +55°di trasporto [°C] -25° ... +70° -25° ... +70°
di stoccaggio [°C] -25° ... +60° -25° ... +60°
Condizioni ambientali classe 3K3 secondo EN 50178 (umidità relativa 85%, senza condensa)
- Lo stato della comunicazione è visualizzato dai due LED presenti sul modulo.➀ Il modulo è normalmente alimentato dall'apparecchiatura sulla quale è installato. L'alimentazione esterna è possibile ed è necessaria se il
collegamento deve essere mantenuto attivo in caso di guasto o di spegnimento del partecipante.* Non ancora disponibili per Drive PLC** Max 10 word 2113 con Drive PLC e Servo PLC
EMF2113IBE82ZAFIC001 E82ZAFIC010

AutomazioneModuli d’automazione
3-24 Drives, motori, automazione 10/2006
3
Tipo di porta FIF AIF
Modulo di comunicazione tipo E82ZAFVC010*➀, E82ZAFVC001 ➀ EMF2175IB ➀
Profilo di comunicazione DeviceNet DeviceNet
Lunghezza max del bus [m] 125 250 500 125 250 500
Velocità di trasmissione con cavo thin [k Bit/s] 100 100 100 100 100 100
Velocità di trasmissione con cavo thick [k Bit/s] 500 250 100 500 250 100
Tipologia del dispositivo slave slave
Tipologia della rete linea (terminata con resistenze da 120 Ω ai due capi)
Numero data words di processo (PCD) 16-bit 12 4 - 12 ➁
Numero max dispositivi collegabili 63 63
Collegamenti elettrici morsetti a vite morsetti a vite sfilabili
Alimentazione esterna DC ➂ alimentazione con cavo a parte nella linea CAN
Tensione d’isolamento a PE [VAC] 50 50
Temperatura di funzionamento [°C] -20° ... +60° 0° ... +55°di trasporto [°C] -25° ... +70° -25° ... +70°
di stoccaggio [°C] -25° ... +60° -25° ... +60°
Condizioni ambientali classe 3K3 secondo EN 50178 (umidità relativa 85%, senza condensa)
DeviceNet
Questo bus di campo ha una vasta diffusione in America edAsia. Il modulo EMF2175IB offre la possibilità di scelta traDeviceNet e CanOpen (tramite micro interruttore).
➀ Modulo systembus CAN, parametrizzabile tramite codici azionamento.➁ 12 con Drive PLC e Servo PLC➂ Il modulo è normalmente alimentato dall'apparecchiatura sulla quale è installato. L'alimentazione esterna è possibile ed è necessaria se il
collegamento deve essere mantenuto attivo in caso di guasto o di spegnimento del partecipante. * Non ancora disponibili per Drive PLC
EMF2175IBE82ZAFVC001 E82ZAFVC010

AutomazioneModuli d’automazione
3-25Drives, motori, automazione 10/2006
3
Tipo di porta FIF AIF
Modulo di comunicazione tipo non disponibile EMF2102IBCV001 ➀, E82ZBLC ➁
Protocollo di comunicazione - LECOM-A/B V2.0
Comunicazione tramite - RS232 (LECOM A)
Formato caratteri: 7E1 - 7 Bit ASCII, 1 stopbit, 1 startbit, 1 parity bit (pari)
Velocità di comunicazione (Baud) [Bit/s] - 1200 2400 4800 9600 19200
Topologia della rete - punto-punto
Numero max partecipanti - 1
Lunghezza max cavi [m] - 15
Collegamento RS232 - connettore femmina tipo sub-D a 9 poli
Collegamento RS485 morsetti a vite sfilabili
Alimentazione esterna DC [VDC] - solo interna
Tensione d’isolamento a PE [VAC] - 50
Temperatura di funzionamento [°C] - 0° ... +50°di trasporto [°C] -25° ... +70°
di stoccaggio [°C] -25° ... +60°
Condizioni ambientali classe 3K3 secondo EN 50178 (umidità relativa 85%, senza condensa)
Lecom-A (RS232)
Questo modulo d'interfaccia è progettato per l'impiegodi PC ed è idoneo per utilizzare programma di configu-razione Lenze Global Drive Control. Esso offre unacomunicazione secondo il protocollo LECOM Lenze.
Modulo E82ZBLC
A differenza degli altri inverter Lenze, nei quali questomodulo è installato sul frontale, per la serie 8200 Motecè necessario l'impiego dell’apposita versione con impu-gnatura.
8200 motec
8200 vector
LenzeLECOM-A
RS232
2102
B
A
PC
AIF
Coperchioda
rimuovere
- Lo stato della comunicazione è visualizzato da due LED presenti sul modulo. ➀ Dispone anche RS485. ➁ Modulo completo di impugnatura palmare dedicato agli inverter 8200 vector e motec. Il cavo di collegamento deve essere ordinato a parte.
EMF2102IBCV001 E82ZBLC
Cavo Tipologia cavo da ordinare a parte Codice
Per collegamento al drive 2,5 m E82ZWL025
A Per collegamento al drive 5 m E82ZWL050
Per collegamento al drive 10 m E82ZWL100
Seriale di collegamento al PC 0,5 m EWL0048
B Seriale di collegamento al PC 5 m EWL0020
Seriale di collegamento al PC 10 m EWL0021

AutomazioneModuli d’automazione
3-26 Drives, motori, automazione 10/2006
3
Tipo di porta FIF AIF
Modulo di comunicazione tipo E82ZAFLC001*, E82ZAFLC010* EMF2102IBCV001➀, EMF2102IBCV002
Comunicazione tramite RS485 (LECOM-B) RS485 (LECOM-B)
Profilo di comunicazione LECOM B V2.0 LECOM B V2.0
Formato caratteri: 7E1 7-bit ASCII, 1 stop bit, 1 start bit, 1 parity bit (pari)
Velocità di trasmissione [k Bit/s] 1200 2400 4800 9600 19200 38400 57600 1200 2400 4800 9600 19200
Tipologia del dispositivo slave slave
Tipologia della rete standard linea lineacon ripetitore linea o albero linea o albero
Numero data words di processo (PCD) 16-bit 2 caratteri -
Numero max dispositivi collegabili standard 31 (= 1 segmento bus) + 1 master 31 (= 1 segmento bus) + 1 mastercon ripetitore 90 90
Lunghezza max cavi per segmento bus ➁ [m] 1000 1200
Collegamenti elettrici morsetti a vite morsetti a vite sfilabilimorsetto CINH = controllore inibito
Alimentazione esterna ➂ [VDC] 24 V ± 10% 24 V ± 10%
[mADC] 70 mA max per modulo 80 mA max per modulo
Tensione d’isolamento a PE [VAC] 50 50
Temperatura di funzionamento [°C] 0° ... +60° 0° ... +55°di trasporto [°C] -25° ... +70° -25° ... +70°
di stoccaggio [°C] -25° ... +60° -25° ... +60
Condizioni ambientali classe 3K3 secondo EN 50178 (umidità relativa 85%, senza condensa)
Lecom-B (RS485)
La comunicazione con questo modulo è basata sul protocolloLecom. Si tratta d'un protocollo aperto e pertanto già integra-to in vari sistemi.
➀ Dispone anche di RS232➁ Dipende dalla velocità di trasmissione e dal tipo di cavo➂ Il modulo è normalmente alimentato dall'apparecchiatura sulla quale è installato. L'alimentazione esterna è possibile ed è necessaria se il
collegamento deve essere mantenuto attivo in caso di guasto, di spegnimento del partecipante oppure in presenza di dispositivi non alimentati,dotati di resistenze di terminazione.
* Non ancora disponibili per Drive PLC
E82ZAFLC001 E82ZAFLC010 EMF2102IBCV001 EMF2102IBCV002

AutomazioneModuli d’automazione
3-27Drives, motori, automazione 10/2006
3
Tipo di porta FIF AIF
Modulo di comunicazione tipo - EMF2102IBCV003 ➀
Comunicazione tramite fibra ottica
Profilo di comunicazione LECOM A/B V2.0
Formato caratteri: 7E1 7-bit ASCII, 1 stop bit, 1 start bit, 1 parity bit (pari)
Velocitàdi trasmissione [k Bit/s] - 1200 2400 4800 9600 19200
Tipologia del dispositivo - Slave
Tipologia della rete - anello
Massimo numero dispositivi collegabili - 52
Lunghezza max cavi per segmento bus [m] 40 ➀ / 60 ➁
Collegamenti elettrici Morsetti a vite sfilabili
Alimentazione esterna ➀ [VDC] - 24 V ± 10%
[mADC] - 120 mA max per modulo
Tensione d’isolamento a PE [VAC] - 50
Temperatura di funzionamento [°C] - 0° ... +55di trasporto [°C] - -25° ... +70°
di stoccaggio [°C] - -25° ... +60
Condizioni ambientali classe 3K3 secondo EN 50178 (umidità relativa 85%, senza condensa)
Lecom-LI
La trasmissione, attraverso fibre ottiche, è particolarmenteinsensibile ai disturbi esterni. La comunicazione con questo modulo è basata sul protocolloLecom. Si tratta d'un protocollo aperto e pertanto già integra-to in vari sistemi, es. Simatic S5.
- Lo stato della comunicazione è visualizzato dai tre LED presenti sul modulo.- Per il collegamento al PC sono disponibili due adattatori per fibra ottica (RS232/fibra ottica):
EMF2125IB con normale potenza di trasmissione(0...40 m)EMF2126IB con elevata potenza di trasmissione(10...60 m)
➀ Il modulo è normalmente alimentato dall'apparecchiatura sulla quale è installato. L'alimentazione esterna è possibile ed è necessaria se ilcollegamento deve essere mantenuto attivo in caso di guasto, di spegnimento del partecipante.
EMF2102IBCV002

AutomazioneModuli d’automazione
3-28 Drives, motori, automazione 10/2006
3
Tipo di porta FIF AIF
Modulo di comunicazione tipo E82ZAFFC001, E82ZAFFC010 non disponibile
Profilo di comunicazione AS-i -
Velocità di trasmissione [k Bit/s] 167 -
Tipologia del dispositivo slave -
Tipologia della rete albero -
Numero max dispositivi collegabili 31 -
Tempo di ciclo [ms] 5 (con 31 nodi collegati) -
Lunghezza max cavi per segmento bus [m] 100 -
Ingressi digitali 2 -
Collegamenti elettrici morsetti a vite -
Alimentazione esterna DC [VDC] fornita dal bus -
Tensione d’isolamento a PE [VAC] 50 -
Temperatura di funzionamento [°C] 0° ... +55° -di trasporto [°C] -25° ... +70° -
di stoccaggio [°C] -25° ... +60° -
Condizioni ambientali classe 3K3 secondo EN 50178 (umidità relativa 85%, senza condensa)
AS Interface
Il bus AS-Interface si è affermato nel livello inferiore di campo,in particolare nel trasferimento di segnali digitali.È un sistema concepito per applicazioni che, non necessaria-mente richiedono l’utilizzo di bus di campo di grande capacità,ma per le quali, tuttavia, non si vuole rinunciare ai vantaggi diuna comunicazione seriale.
- Lo stato della comunicazione è visualizzato dai due LED presenti sul modulo.- Sono disponibili 4 bit dati verso 8200 vector/motec (Comando). I bit possono essere occupati liberamente nell'inverter.
Esempio:bit 1 assegnato alla funzione “Jog 1”bit 2 assegnato alla funzione “Jog 2”bit 3 assegnato alla funzione “freno CC”bit 4 assegnato alla funzione “inversione senso di rotazione”
- Sono disponibili 4 bit dati dall’inverter 8200 vector/motec (Comando). I bit possono essere occupati liberamente nell'inverter.Esempio:bit 1 rispostabit 2 liberamente assegnabilebit 3 stato ingresso digitalebit 4 stato ingresso digitale
Vantaggi del sistema:˘ Facile applicazione e messa in servizio˘ Riduzione costi di cablaggio˘ Semplice integrazione con sistemi esistenti˘ Riduzione costi
E82ZAFFC001 E82ZAFFC010
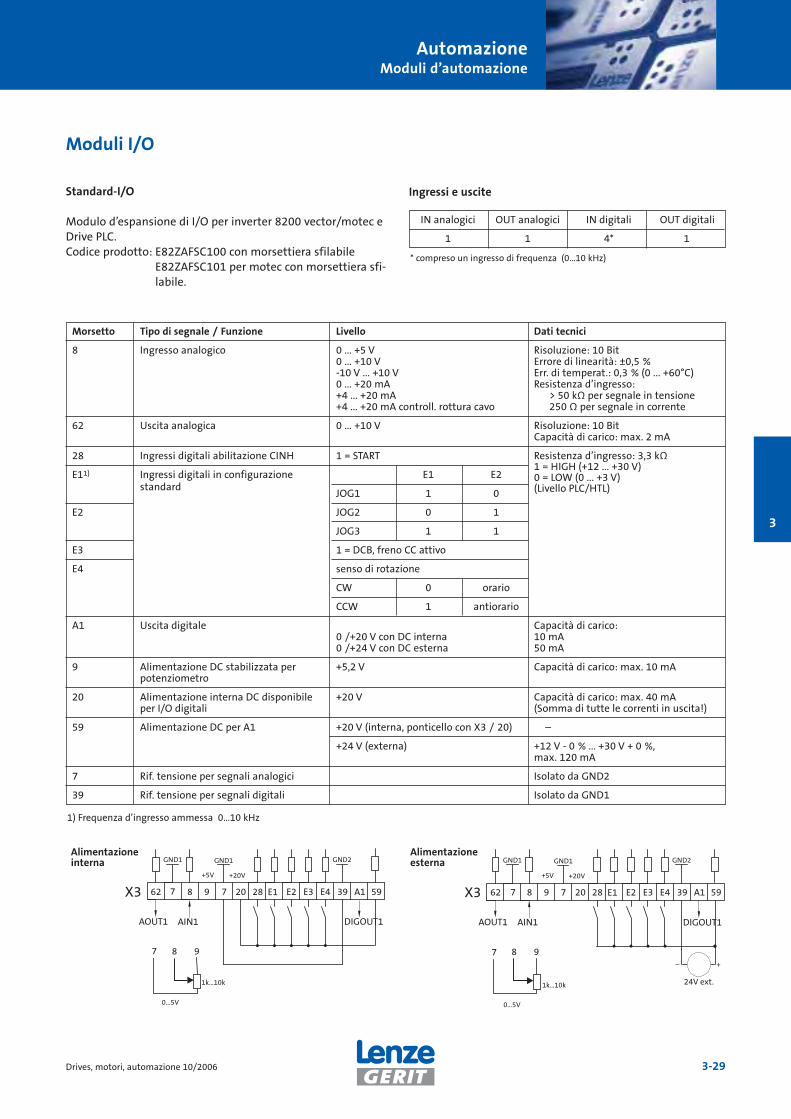
AutomazioneModuli d’automazione
3-29Drives, motori, automazione 10/2006
3
GND1
62 7 8 9 20 28 E1 E2 E3 E4 39 A1 59X3 7
GND1 GND2
+5V +20V
+_
24V ext.
8 97
1k…10k
0…5V
AIN1AOUT1 DIGOUT1
Morsetto Tipo di segnale / Funzione Livello Dati tecnici
8 Ingresso analogico 0 ... +5 V Risoluzione: 10 Bit0 ... +10 V Errore di linearità: ±0,5 %-10 V ... +10 V Err. di temperat.: 0,3 % (0 ... +60°C)0 ... +20 mA Resistenza d’ingresso: +4 ... +20 mA > 50 kΩ per segnale in tensione +4 ... +20 mA controll. rottura cavo 250 Ω per segnale in corrente
62 Uscita analogica 0 ... +10 V Risoluzione: 10 BitCapacità di carico: max. 2 mA
28 Ingressi digitali abilitazione CINH 1 = START Resistenza d’ingresso: 3,3 kΩ
E11) Ingressi digitali in configurazione E1 E21 = HIGH (+12 ... +30 V)
standardJOG1 1 0
0 = LOW (0 ... +3 V)
E2 JOG2 0 1
(Livello PLC/HTL)
JOG3 1 1
E3 1 = DCB, freno CC attivo
E4 senso di rotazione
CW 0 orario
CCW 1 antiorario
A1 Uscita digitale Capacità di carico:0 /+20 V con DC interna 10 mA0 /+24 V con DC esterna 50 mA
9 Alimentazione DC stabilizzata per +5,2 V Capacità di carico: max. 10 mApotenziometro
20 Alimentazione interna DC disponibile +20 V Capacità di carico: max. 40 mAper I/O digitali (Somma di tutte le correnti in uscita!)
59 Alimentazione DC per A1 +20 V (interna, ponticello con X3 / 20) –
+24 V (externa) +12 V - 0 % ... +30 V + 0 %, max. 120 mA
7 Rif. tensione per segnali analogici Isolato da GND2
39 Rif. tensione per segnali digitali Isolato da GND1
1) Frequenza d’ingresso ammessa 0…10 kHz
Standard-I/O
Modulo d’espansione di I/O per inverter 8200 vector/motec eDrive PLC.Codice prodotto: E82ZAFSC100 con morsettiera sfilabile
E82ZAFSC101 per motec con morsettiera sfi-labile.
* compreso un ingresso di frequenza (0…10 kHz)
IN analogici OUT analogici IN digitali OUT digitali
1 1 4* 1
Moduli I/O
GND1
62 8 9 20 28 E1 E2 E3 E4 39 A1 59X3
GND1 GND2
8 97
0…5V
+5V +20V
1k…10k
AIN1AOUT1 DIGOUT1
7 7
Alimentazioneinterna
Alimentazioneesterna
Ingressi e uscite

AutomazioneModuli d’automazione
3-30 Drives, motori, automazione 10/2006
3
Morsetto Tipo di segnale Livello Dati tecnici
1U / 2U Ingresso analogico 0 ... +5 V Risoluzione: 10 Bit0 ... +10 V Errore di linearità: ±0,5 %-10 V ... +10 V Err. di temperatura: 0,3 % (0 ... +60 °C)
1I / 2I 0 ... +20 mA Resistenza d'ingresso:+4 ... +20 mA > 100 kΩ per segnale di tensione +4 ... +20 mA (contr. rottura cavo) 250 Ω per segnale di corrente
62 Uscite analogiche 0 ... +10 V0 ... +20 mA Risoluzione: 10 Bit
63 Caricabile (0 ... +10 V): max. 2 mA
28 Ingressi digitali abilitazione CINH 1 = START
E11) Ingressi digitali in configurazione E1 E2standard
JOG1 1 0
E2 JOG2 0 1 Resistenza di ingresso: 3 kΩ
JOG3 1 1 1 = HIGH (+12 ... +30 V)
E3 1 = DCB 0 = LOW (0 ... +3 V)
E4 senso di rotazione
CW 0 orario
CCW 1 antiorario
E5 Non preconfigurato
E6 Non preconfigurato
A1 Uscite digitali Capacità di carico:0 /+20 V con DC interno 10 mA
A2 0 /+24 V con DC esterno 50 mA
A4 Frequenza in uscita (HTL) livello alto: 18…24 V 0 ...10 kHzlivello basso: 0 V Capacità di carico: max. 5 mA
9 Alimentazione stabilizzata DC +5,2 V Capacità di carico: max. 2 mAper potenziometro
20 Alimentazione interna DC disponibile +20 V Capacità di carico: max. 70 mAper I/O digitali (Somma di tutte le correnti in uscita!)
59 Alimentazione DC per A1/A2 +20 V (interna, ponticello con X3 / 20) –
+24 V (esterna) +12 V - 0 % ... +30 V + 0 %, max. 200 mA
7 Tensione di riferimento –
INanalogici OUTanalog. IN digitali OUT digitali OUT frequenza
2 2 6* 2 1
Application-I/O
Modulo d’espansione di I/O per inverter 8200 vector e motec.Codice prodotto: E82ZAFAC010
E82ZAFAC001 per motec.* compreso un ingresso di frequenza (0…100 kHz) a 1 o 2 canali
1) Frequenza d’ingresso ammessa 0…100 kHz, 1 o 2 canali– I motori AC e i motoriduttori Lenze possono essere forniti con encoder Lenze ITD21 (512/2048 incrementi, uscita HTL). In questo modo, utilizzando il modulo
Application-I/O, si può gestire un segnale di retroazione bidirezionale (canali A e B).
91I 2U1U 2I 62 63X3
0…5V
1U 97+5V
GND
A2A1 7 7 A4 20 28 E1 E2 E3 E4 E5 E6X3 59
GND
+20V
1k…10k
AIN2 AOUT2
DIGOUT2
AIN1 AOUT1
DFOUT1DIGOUT1
91I 2U1U 2I 62 63X3
0…5V
1U 97+5V
GND
A2A1 7 7 A4 20 28 E1 E2 E3 E4 E5 E6X3 59
GND
+20V
+24V ext.
_
1k…10k
AIN2 AOUT2
DIGOUT2
AIN1 AOUT1
DFOUT1DIGOUT1
Alimentazione interna Alimentazioneesterna

AutomazioneModuli d’automazione
3-31Drives, motori, automazione 10/2006
3
Bus-I/O
Questo modulo d’espansione di ingressi e uscite è studiatoesclusivamente per gli inverter 8200 motec. Il suo impiego è indispensabile per rendere trasparenti gli I/Oal bus di comunicazione, installato sulla seconda porta FIF deimotec. Gli ingressi ed uscite del Bus-I/O sono identici a quelli delmodulo Standard-I/O, descritto a pag. 2-37.Codice prodotto: E82ZMFBC001 motec 0,25...0,37 kW
E82ZAFBC001 motec 0,55...2,2 kWE82ZAFBC201 motec 3...7,5 kW.
* compreso un ingresso di frequenza (0…10 kHz)
IN analogici OUT analogici IN digitali OUT digitali
1 1 4* 1
Ingressi e uscite
GND1
62 7 8 9 20 28 E1 E2 E3 E4 39 A1 59X3 7
GND1 GND2
+5V +20V
+_
24V ext.
8 97
1k…10k
0…5V
AIN1AOUT1 DIGOUT1
GND1
62 8 9 20 28 E1 E2 E3 E4 39 A1 59X3
GND1 GND2
8 97
0…5V
+5V +20V
1k…10k
AIN1AOUT1 DIGOUT1
7 7
Alimentazioneinterna
Alimentazioneesterna

AutomazioneModuli d’automazione
3-32 Drives, motori, automazione 10/2006
3
Alimentazione interna (X3/20):• X3/28, controller inhibit (CINH)• X3/I1 e X3/I2, ingressi digitali
Cablaggio minimo
Alimentazione esterna:• X3/28, controller inhibit (CINH)• X3/I1 e X3/I2, ingressi digitali
GND1 +20V
39 28 39 28 7 LO HI 7 LO HI 7 E1 E2 20
CAN-GND
CAN-LOW
CAN-HIGH
X3
GND2
CAN-GNDCAN-LOW
CAN-HIGH+
_
24Vext.
+20V
GND2
39 28 39 28 7 LO HI 7 LO HI 7 20X3 E1 E2
GND1
CAN-I/O
Questo modulo, studiato per gli inverter 8200 abbina un’in-terfaccia CAN a 2 ingressi digitali liberamente configurabili edun ingresso per l’inibizione del controllo. L’indirizzo del nodo ela velocità di trasmissione sono selezionabili via DIP switch.Codice prodotto: E82ZAFCC100 per vector 1 MBit/s
E82ZAFCC210 per vectorE82ZAFCC201 per motec/starttec.
X3/ Tipo di segnale Funzione Livello
39 GND2 Riferimento di potenziale 2 (terra) perinibizione comtrollo CINH su X3/28
28 CINH Inibizione controllo • Start = HIGH (+12 V ... +30 V)• Stop = LOW (0 V ... +3 V)
7 GND1GND2 Riferimento di potenziale1 (terra)
LO CAN-LOW Linea dati Systam bus LOW
HI CAN-HIGH Linea dati Systam bus HIGH
L1 0 = LOW (0 ... +3 V) riferiti a GND1
L2Ingressi digitali Configurabili dall’utente
1 = HIGH (+12 ... +30 V) riferiti a GND1
IN analogici OUT analogici IN digitali OUT digitali
– – 2 –
Ingressi e uscite
Modulo di comunicazione E82ZAFCC100 E82ZAFCC200, E82ZAFCC201
Velocità di trasmissione [k Bit/s] 10 20 50 125 250 500 1000 10 20 50 125 250 500 1000
Distanza massima [m] – 3930 1530 610 270 80 9 – 3910 1510 590 250 80 –

AutomazioneModuli d’automazione
3-33Drives, motori, automazione 10/2006
3
Profibus-I/O
Questo modulo, studiato esclusivamente per gli inverter8200 vector e motec, abbina un’interfaccia Profibus a dueingressi digitali liberamente configurabili ed un ingresso perl’inibizione del controllo. Tramite DIP switch è possibile setta-re l’indirizzo del nodo e la velocità di trasmissione.Codice prodotto: E82ZAFPC201.
IN analogici OUT analogici IN digitali OUT digitali
– – 2 –
Ingressi e uscite
X3/ Tipo di segnale Funzione Livello
39 GND2 Riferimento di potenziale 2 (terra) per- inibizione comtrollo CINH su X3.2/28- ingressi digitali su X3.1/E1 e X3.1/E2
59 Alimentazione DC estena U (ext.) = 24 VDC ± 10% riferiti a GND1
7 GND1 Riferimento di potenziale 1 (terra)X3.1/20 e X3.2/20
20 Sorgente di tensione DC interna per inibizione controllo CINH e ingressi + 20 V riferiti a GND1digitali E1/E2
E1 Configurabili dall’utente tramite C007vedere manuale
E2Ingressi digitali
oppure C0410
E1 E2 20 20 39 59 7
GND1 GND1GND1
B CN 720 59+5V +20V
+20V
A VP 28397BA
GND2GND2
40
GND3
Alimentazione interna (X3.1/20 o X3.2/20)• X3.1/E1 e X3.1/E2, ingressi digitali• X3.2/28, inibizione controllo (CINH)
Alimentazione esterna, unica• X3.1/E1 e X3.1/E2, ingressi digitali• X3.2/28, inibizione controllo (CINH)• X3.2/59, nodo Profibus
Alimentazione esterna, separata• X3.1/E1 e X3.1/E2, ingressi digitali• X3.2/28, inibizione controllo (CINH)
Alimentazione esterna, separata• X3.2/59, nodo Profibus

AutomazioneModuli d’automazione
3-34 Drives, motori, automazione 10/2006
3

AutomazioneTelecontrollo
3-35Drives, motori, automazione 10/2006
3
Per essere competitivi, i costruttori di macchine e impiantirichiedono soluzioni che permettano di ottimizzare i costi diproduzione. Le macchine e gli impianti di concezione modu-lare si stanno affermando sempre più, in quanto consentonola realizzazione di soluzioni personalizzate e convenienti.Viene inoltre sempre più richiesta anche la possibilità di svol-gere attività di controllo, variazione parametri e diagnosticaa distanza. Questo tipo di manutenzione consente un miglio-re supporto del personale addetto alla messa in servizio ed alfunzionamento, praticamente in tutte le fasi del ciclo di vitadella macchina, contribuendo così al contenimento dei costi.
Accesso ai drive in tutto il mondo˘ Miglioramento della disponibilità, grazie alla
manutenzione preventiva˘ Tempi di fermo macchina ridotti, grazie a un supporto
veloce e mirato˘ Risparmio sui costi di viaggio; un solo viaggio risparmiato
spesso consente di ammortizzare i costi d'acquisto˘ Possibilità di una sorveglianza continua della qualità di
produzione.
Telecontrollo
ModemCAN 2181La soluzione classica per l'accesso remoto è la connessionevia modem tramite una linea telefonica analogica, facile dainstallare e da gestire.
EthernetCAN 2180Integrazione verticale e connessione a sistemi di livello supe-riore sono le principali caratteristiche di questo dispositivo.System bus (CAN) ed Ethernet in una singola unità.
OPC DriveServerI server OPC sono la soluzione universale per la comunicazio-ne standardizzata tramite PC indipendente dal bus di campoe offrono la possibilità di collegarsi a software proprietari.
La scelta dei componenti software o hardware giusti per tele-controllo dipende molto dall'ambiente di impiego. È impor-tante considerare il livello richiesto d'integrazione nei sistemiesistenti e se si vogliono utilizzare collegamenti remoti esi-stenti. In base alle vostre esigenze, Lenze vi indicherà i com-ponenti più opportuni.

AutomazioneTelecontrollo
3-36 Drives, motori, automazione 10/2006
3
ModemCAN 2181
Il modulo di comunicazione ModemCAN 2181 consente l'al-lacciamento diretto di un bus CAN ad una linea telefonicaanalogica. L'installazione è facile, poco complessa e anche ilcontrollo degli accessi può essere eseguito in modo relativa-mente semplice e non è richiesto l'intervento del personaleIT. Il modem analogico interno è certificato per tutti i piùimportanti paesi e standard telefonici e permette il telecon-trollo in tutto il mondo.Qualora il modem interno non fosse idoneo o nel caso in cuifosse richiesto un collegamento GSM o ISDN, è comunquepossibile collegare un modem esterno.
Applicazione 1Accesso remoto ai dispositivi collegatial bus CAN tramite linea telefonicaanalogica
Doppia sicurezza Per il controllo degli accessi il ModemCAN 2181 offre unafunzione di protezione mediante password. È inoltre possibileconfigurare il dispositivo in modo da richiamare automatica-mente un numero configurato dopo avere eseguito il login. Intal modo si assicura che non possano accedere al sistemachiamanti non autorizzati.
Il modemCAN 2181 è in gradi di operare anche con apparec-chiature di differenti costruttori. In questo caso, per evitarel’impiego di un modem ed una linea telefonica per ogniapparecchiatura, si consoglia di collegare i singoli componen-ti da monitorare in remoto ad un sistema master.
System bus CAN
ModemCAN
2181
Rete telefonica
analogica
Rete telefonica analogica CAN
Interfaccia diagnostica9400
Modem
interno
Modemesterno
Collegamento per
modem esterno

AutomazioneTelecontrollo
3-37Drives, motori, automazione 10/2006
3
Applicazione 2Accesso remoto al dispositivo 9400 econtrollo dei dispositivi subordinati*
ModemCAN 2181
Connessioni
CAN Systembus CAN o CANopen, 7SUB-D 9 poli
DIAG* Interfaccia diagnostica 9400, RJ69
Line Telefono analogico, RJ11
Modem esterno RS232 per modem esterno
Segnalazioni
Alimentazione Dispositivo alimentato
CAN LED ERR e LED RUN secondo CiA DR303-3
Modem Attivato via telefono
Velocità trasmissione
CAN 20 kBd ... 1MBd
Modem 300 Bd ... 56 kBd
Software
Configurazione Nel configuratore del bus di sistema
Interfaccia OPC DriveServer
Alimentazione 24 V c.c. (18 - 35 V)
Unità supportate 8200, 8200 vector, 8200 motec, 9300, Servo PLC, Drive PLC, ECS, 9400*, starttec, HMI*, I/O System
Codice d’ordine EMF2181IB
ModemCAN
2181
ETHERNET Powerlink
System bus CAN
Rete telefonica
analogica
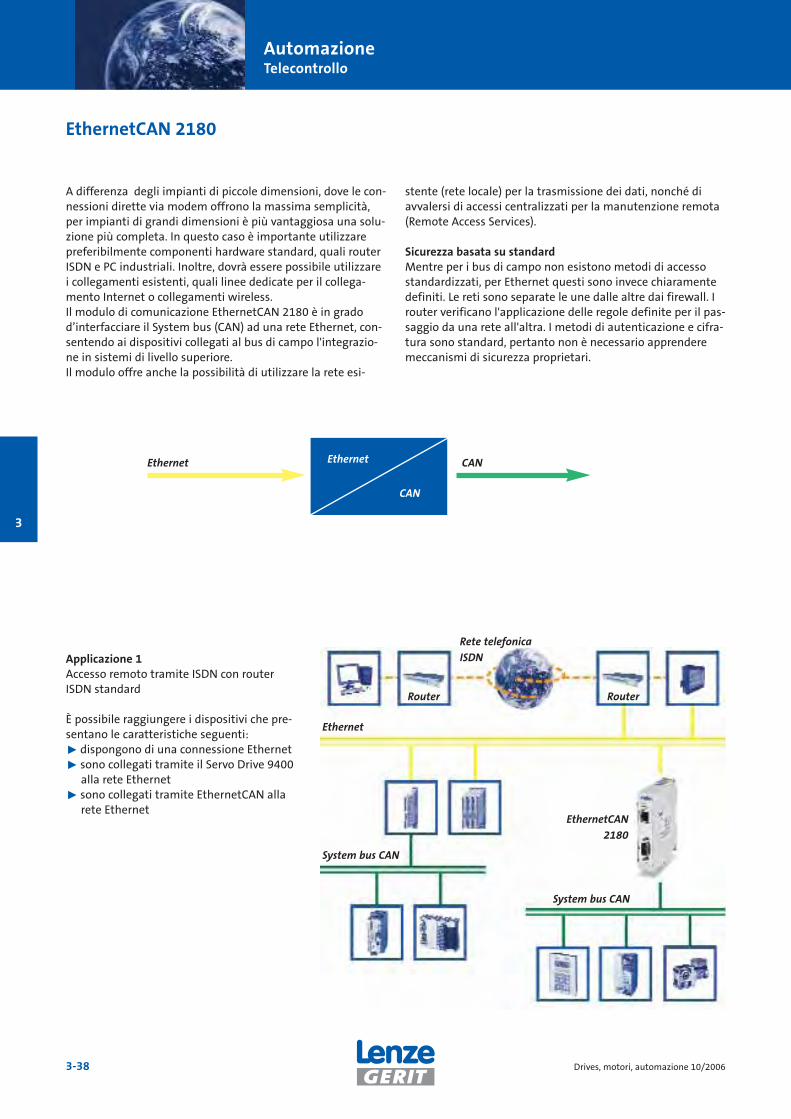
AutomazioneTelecontrollo
3-38 Drives, motori, automazione 10/2006
3
EthernetCAN 2180
A differenza degli impianti di piccole dimensioni, dove le con-nessioni dirette via modem offrono la massima semplicità,per impianti di grandi dimensioni è più vantaggiosa una solu-zione più completa. In questo caso è importante utilizzarepreferibilmente componenti hardware standard, quali routerISDN e PC industriali. Inoltre, dovrà essere possibile utilizzarei collegamenti esistenti, quali linee dedicate per il collega-mento Internet o collegamenti wireless.Il modulo di comunicazione EthernetCAN 2180 è in gradod’interfacciare il System bus (CAN) ad una rete Ethernet, con-sentendo ai dispositivi collegati al bus di campo l'integrazio-ne in sistemi di livello superiore. Il modulo offre anche la possibilità di utilizzare la rete esi-
stente (rete locale) per la trasmissione dei dati, nonché diavvalersi di accessi centralizzati per la manutenzione remota(Remote Access Services).
Sicurezza basata su standardMentre per i bus di campo non esistono metodi di accessostandardizzati, per Ethernet questi sono invece chiaramentedefiniti. Le reti sono separate le une dalle altre dai firewall. Irouter verificano l'applicazione delle regole definite per il pas-saggio da una rete all'altra. I metodi di autenticazione e cifra-tura sono standard, pertanto non è necessario apprenderemeccanismi di sicurezza proprietari.
Applicazione 1Accesso remoto tramite ISDN con routerISDN standard
È possibile raggiungere i dispositivi che pre-sentano le caratteristiche seguenti:˘ dispongono di una connessione Ethernet˘ sono collegati tramite il Servo Drive 9400
alla rete Ethernet˘ sono collegati tramite EthernetCAN alla
rete Ethernet
System bus CAN
System bus CAN
Ethernet
Router Router
Rete telefonica
ISDN
EthernetCAN
2180
Ethernet CANEthernet
CAN

AutomazioneTelecontrollo
3-39Drives, motori, automazione 10/2006
3
EthernetCAN 2180
Connessioni
CAN Systembus CAN o CANopen, SUB-D 9 poli
Ethernet Ethernet standard
Segnalazioni
Alimentazione Dispositivo alimentato
CAN LED ERR e LED RUN secondo CiA DR303-3
Ethernet Collegamento e trasmissione dati
Velocità trasmissione
CAN 20 kBd ... 1MBd
Ethernet 10 MBd/100 MBd
Software
Configurazione Nel configuratore del bus di sistema
Interfaccia OPC DriveServer
Alimentazione 24 V c.c. (18 - 35 V)
Unità supportate 8200, 8200 vector, 8200 motec, 9300, Servo PLC, Drive PLC, ECS, 9400*, starttec, HMI*, I/O System
Codice d’ordine EMF2180IB
Applicazione 2Accesso ai dispositivi con "bypass" del sistema dicomando
˘ Accesso unificato: i PC necessitano della solaconnessione Ethernet
˘ Accesso contemporaneo al sistema dicomando e all'azionamento
˘ Indipendente dal sistema di comando e dalbus di comando
˘ Commutazione al System bus (CAN) in mododecentralizzato tramite EthernetCAN 2180
System bus CAN
Ethernet
Bus di campo
EthernetCAN
2180

AutomazioneTelecontrollo
3-40 Drives, motori, automazione 10/2006
3
OPC Drive Server
Telecontrollo con OPC DriveServerMediante l'uso di un PC industriale (IPC) è possibile passaredal livello della produzione agli uffici, ovvero dal bus di cam-po alla rete locale (LAN). Tramite un qualsiasi software OPC (ad es. Global Drive Con-trol, L-force Engineer) e OPC DriveServer, l'utente può accede-re in remoto a tutti gli azionamenti.La manutenzione remota non potrebbe essere più semplice: ilPC industriale necessita solo dell'accesso alla rete aziendale edi OPC DriveServer.
"Bus software"OPC DriveServer realizza il collegamento con il software delcliente e crea la base per la comunicazione tra software ehardware. Qualsiasi applicazione che supporta l'interfacciaOPC può avere accesso a tutte le funzionalità degli aziona-menti.
Le funzioni˘ Accesso facile e standardizzato ai parametri dei dispositivi;
identificazione diretta˘ Utilizzo di sistemi di bus di campo diversi con la stessa
interfaccia utente˘ Trasferimento delle parametrizzazioni˘ Download di programmi
Le possibilità per l'utente˘ Le suddette funzionalità sono disponibili nella rete locale
(LAN) e tramite collegamenti remoti˘ Accesso a tutti i parametri con qualsiasi software OPC e
visualizzazione completa dela loro descrizione˘ Integrazione degli azionamenti nell'ambiente run-time
standard (ad es. visualizzazione)˘ Integrazione degli azionamenti in applicazioni proprietarie˘ Manutenzione remota conveniente utilizzando un sistema
esistente con Simatic S7 e Teleservice
OPC OPC OPC OPC OPCBus server Bus server Bus server Bus server Bus server
LECOM System bus S7 Ethernet Altri9400 costruttori
Server
OPC
Drive ServerOPC
Server

AutomazioneTelecontrollo
3-41Drives, motori, automazione 10/2006
3
OPC Drive Server
Requisiti di sistema
Sistema operativo Windows 98 Windows ME Windows NT Windows 2000 Windows XP
Hardware PC standard o PC industriale
Sistemi bus
LECOM LECOM A/B/LI
Systembus CAN Moduli d’interfaccia:- adattatore systembus 2173- adattatore systembus USB 2177- ModemCAN 2181- EthernetCAN 2180
Ethernet Ethernet 9400 (canale parametri secon-do ETHENET Powerlink V2.0)*
Diagnostica PC standard o PC industriale
Applicazione Lettura/scritturaTrasferimento parametrizzazioniDownload programmi (escluso LECOM)Download curve (escluso LECOM)
Unità supportate 8200, 8200 vector, 8200 motec, 9300, Servo PLC, Drive PLC, ECS, 9400*, starttec, HMI*, I/O System
Codice d’ordine ESP-DRS1
OPC Drive Server S7
Requisiti di sistema
Sistema operativo Windows 98 Windows ME Windows NT Windows 2000 Windows XP
Hardware PC standard o PC industriale
Sistemi bus
S7 S7 via MPIS7 via ProfibusS7 via EthernetS7 via Teleservice
LECOM LECOM A/B/LI
Systembus CAN Moduli d’interfaccia:- adattatore systembus 2173- adattatore systembus USB 2177- ModemCAN 2181- EthernetCAN 2180
Ethernet Ethernet 9400 (canale parametri secon-do ETHENET Powerlink V2.0)*
Diagnostica PC standard o PC industriale
Applicazione Lettura/scritturaTrasferimento parametrizzazioniDownload programmi (escluso LECOM)Download curve (escluso LECOM)
Unità supportate 8200, 8200 vector, 8200 motec, 9300, Servo PLC, Drive PLC, ECS, 9400*, starttec, HMI*, I/O System
Codice d’ordine ESP-DRS1-S7
LAN
GDC
Bus di campo
IPC + DriveServer

AutomazioneTelecontrollo
3-42 Drives, motori, automazione 10/2006
3
Singola postazione L'interfaccia di collegamento al bus dicampo ed i programmi di visualizza-zione si trovano sullo stesso PC.
OPC Topologia 1
Rete locale (LAN)Tramite una LAN è possibile accedere a OPC Drive-Server da qualsiasi PC ed ai sistemi di azionamentoconnessi, via OPC DriveServer.
OPC Topologia 2 e 3
Reti locali, collegate tramite connessione telefonicaLa comunicazione in rete è possibile anche quando laLAN dispone di un modem analogico o ISDN.

AutomazioneTelecontrollo
3-43Drives, motori, automazione 10/2006
3
Accesso tramite Simatic S7Gli azionamenti Lenze vengono parametrizzati via PROFIBUStramite i sistemi Siemens® S7. Per il collegamento tra PC ePLC è possibile utilizzare MPI, PROFIBUS o Ethernet (TCP o H1).
Uso di Teleservice S7OPC DriveServer S7 ed il software Lenze e Step7® consentonol’utilizzo di teleassistenza basata su Teleservice S7 per sup-portare anche gli azionamenti Lenze.
OPC Topologia 4 OPC Topologia 5




















