
Dinámica de Coalición-Fragmentación
22
Sociof´ ısica y Redes Sociales - Din´ amica de Coalici´on-Fragmentaci´ onEspont´anea. Alfonso de Miguel April 28, 2015 Abstract En esta tarea estudiamos el problema de coalici´ on-fragmentaci´ on de los 5 pa´ ıses en el marco de trabajo de la Din´ amica de Coalici´ on-Fragmentaci´ on Espont´ anea de- sarrollada por Galam. Primero, introducimos el formalismo de Galam y su aplicaci´ on al problema de los 2 y 3 pa´ ıses. Entonces, abordamos el problema de los 5 pa´ ıses. Se propone una din´ amica computacional para simular el problema y estudiarlo de man- era m´ as sistem´ atica. A continuaci´ on se modifica la topolog´ ıa como Galam propone para resolver el problema de la inestabilidad. Finalmente, se expone una discusi´ on sobre posibles generalizaciones a los modelos de coalici´ on/fragmentaci´ on de pa´ ıses. 1 Introducci´on. Habiendo estudiado ya varios modelos del pionero de la sociof´ ısica, Serge Galam, vemos la gran influencia del modelo de Ising ferromagn´ etico en todos ellos. Estos asumen que la interacci´ on entre los agentes tiende a alinearlos en la direcci´ on de la misma opini´ on. Sin embargo, en la naturaleza se observa un comportamiento m´ as rico e interesante que el de una mera imitaci´ on. Por ejemplo, tenemos el fen´ omeno del antiferromagnetismo, i.e., un material donde los espines interaccionan entre s´ ı de tal forma que tienden a alinearse antiparalelamente. En consecuencia, ser´ ıa muy natural explorar este comportamiento transportandolo a modelos sociales de acoplamiento entre agentes, ya que tambi´ en es natural observar en la naturaleza social fen´ omenos de rechazo y/o divergencias entre los agentes sociales. Aqu´ ı seguimos el modelo propuesto por Galam, que surgi´ o inspirado por el trabajo (poco esclarecedor) de unos polit´ ologos. Galam considera el estudio de la din´ amica de formaci´ on de coaliciones espont´ aneas frente a la fragmentaci´ on. Introduce un esquema para construir coaliciones por el libre albedr´ ıo de los agentes implicados. El modelo puede aplicarse de igual forma a empresas, gente, pa´ ıses, o a cualquier agente social. 1
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Dinámica de Coalición-Fragmentación

Sociofısica y Redes Sociales - Dinamica de
Coalicion-Fragmentacion Espontanea.
Alfonso de Miguel
April 28, 2015
Abstract
En esta tarea estudiamos el problema de coalicion-fragmentacion de los 5 paısesen el marco de trabajo de la Dinamica de Coalicion-Fragmentacion Espontanea de-sarrollada por Galam. Primero, introducimos el formalismo de Galam y su aplicacional problema de los 2 y 3 paıses. Entonces, abordamos el problema de los 5 paıses. Sepropone una dinamica computacional para simular el problema y estudiarlo de man-era mas sistematica. A continuacion se modifica la topologıa como Galam proponepara resolver el problema de la inestabilidad. Finalmente, se expone una discusionsobre posibles generalizaciones a los modelos de coalicion/fragmentacion de paıses.
1 Introduccion.
Habiendo estudiado ya varios modelos del pionero de la sociofısica, Serge Galam, vemosla gran influencia del modelo de Ising ferromagnetico en todos ellos. Estos asumen que lainteraccion entre los agentes tiende a alinearlos en la direccion de la misma opinion. Sinembargo, en la naturaleza se observa un comportamiento mas rico e interesante que elde una mera imitacion. Por ejemplo, tenemos el fenomeno del antiferromagnetismo, i.e.,un material donde los espines interaccionan entre sı de tal forma que tienden a alinearseantiparalelamente. En consecuencia, serıa muy natural explorar este comportamientotransportandolo a modelos sociales de acoplamiento entre agentes, ya que tambien esnatural observar en la naturaleza social fenomenos de rechazo y/o divergencias entre losagentes sociales.
Aquı seguimos el modelo propuesto por Galam, que surgio inspirado por el trabajo(poco esclarecedor) de unos politologos. Galam considera el estudio de la dinamica deformacion de coaliciones espontaneas frente a la fragmentacion. Introduce un esquemapara construir coaliciones por el libre albedrıo de los agentes implicados. El modelopuede aplicarse de igual forma a empresas, gente, paıses, o a cualquier agente social.
1

2 El problema de los 2 paıses.
Como introduccion del formalismo y contextualizacion para el trabajo posterior deanalisis de un caso de dinamica de coalicion/fragmentacion de 5 paıses, exponemosprimeramente el problema mas sencillo de los 2 paıses.
Dados dos paıses i y j, podrıan cooperar o estar en conflicto. Teniendo dos situa-ciones, podemos introducir una variable de espın Si = ±1 de dos estados. Los estados+1 y −1 son simetricos. Con esto, 4 configuraciones son entonces posibles, {±1,±1}.Los paıses se considera que cooperan entre sı cuando su variable de espın posee elmismo signo, esto es, Si = Sj = ±1, y se hallan en conflicto cuando el signo difiere,Si = −Sj = ±1.
Sobre esta base, para evaluar el coste de que los paıses bien cooperen, bien estenen conflicto, notamos que han ido desarrollando una propension a cooperar o estarenfrentados a lo largo de sus muchos anos de existencia. Esta propensidad, o afinidad,va a depender de ingredientes muy diversos: la geografıa, los recursos, la religion, ellenguaje, los sucesos historicos, etc.
Se postula que el resultado neto de este pasado historico de relaciones culmina conun enlace cuantitativo bilateral, que podemos representar con una magnitud Gij . SiGij > 0, la tendencia es cooperativa, si Gij < 0, la tendencia es conflictiva. La ausenciade un enlace es tambien posible sin mas que hacer que Gij = 0. La variable Gij es loque se denominarıa una variable congelada (quenched variable) ya que es el balance deuna acumulacion de sucesos a lo largo de un extenso periodo de tiempo, y que no estadada a una libre modificacion. El acoplamiento Gij no depende separadamente de i y dej; es un enlace comun entre el par (i, j). Suponemos tambien acoplamiento simetricosGij = Gji. El coste de las actitudes de los dos paıses i y j puede medirse por la magnitud
Hij ≡ −GijSiSj , (1)
que sera igual a −Gij en caso de cooperacion, y a Gij si hay conflicto.
Ahora, necesitamos un criterio para determinar la eleccion de cada paıses segun unGij dado. Hacemos la hipotesis de cada paıs ha de minimizar su coste. Suponemosque cada paıs quiere minimizar su coste. Esto implica que poseer un coste negativo esbeneficioso para el paıs. Por lo tanto, Gij > 0 favorecera una situacion de cooperacioncon Si = Sj , mientras que Gij < 0 impulsara a los paıses hacia el conflicto, Si = −Sj . Esdecir, para un par de paıses con acoplamiento negativo, la situacion mas comoda paraellos, la situacion estable, es estar en conflicto.
2

3 El problema de los 3 paıses.
Aunque hemos hecho un sencillo repaso, puede intuirse que el problema de los 2-paısesencuentra una situacion de equilibrio de manera bien sencilla. Es su pasado de actitudescomunes el que determina las actitudes presentes. Un pasado de conflictos dara lugara un presente y futuro tambien problematicos, mientras que un pasado de cooperacion,asegurara buenas relaciones en tiempos posteriores. Pero, desde luego, esta situaciones mas bien poco realista, y en el globo terraqueo encontramos que los paıses tienenmas de un vecino. Desde luego, es ası, aunque no sea geograficamente, en este mundoglobalizado no hay paıs que no tenga vınculos con unas decenas de otros tantos, seanvınculos positivos o negativos, y mas o menos fuertes/arraigados.
Como preambulo a la situacion compleja de 5 paıses, damos un salto de la situacionmas sencilla de los 2 paıses a la de 3 paıses. A pesar de anadir una sola nacion mas, vemosque la situacion se complica enormemente; el aumento de la complejidad es considerableanadiendo un unico paıs. Estudiemos pues someramente que puede ocurrir con unsistema de 3 paıses y luego daremos el salto definitivo al estudio de los 5 paıses.
Sea N = 3 paıses los que conforman el sistema. Ahora tenemos una terna deacoplamientos a pares, G12, G13, G23. Si los suponemos todos positivos, nuestro cri-terio de minimizacion de conflictos provoca que los 3 paıses cooperen en una alianzaestable formada espontaneamente, con S1 = S2 = S3 = ±1. Bueno, esto es una posi-bilidad, pero no es la mas interesante. Supongamos que uno de los acoplamientos, v.g.,G23, es negativo. Entonces, puede encontrarse que la situacion se torna inestable, sum-ida en un perpetuo ciclo de formacion de alianzas seguidos de fragmentaciones, y asıalternadamente.
Vease. Tomamos, por ejemplo, G12 = G13 = −G23 = G. Vease la imagen 11
Figure 1: El problema de los tres paıses.
1Las imagenes aquı expuestas provienen del libro de Galam [1].
3

Si los paıses 1 y 3 deciden cooperar para minimizar su conflicto mutuo (G13 > 0),tenemos S1 = S3 = ±1. En este caso +1. Entonces, el paıs 2 ha decidir que actitudadoptar. Como G12 > 0, querra cooperar con el paıs 1, pero simultaneamente ocurre quesu relacion con el paıs 3 es tal que G23 < 0, de modo que querra estar en conflicto coneste. No existe pues, una unica solucion. Siendo ambas equivalentes, tomese S2 = −1.Tenemos, por tanto, que se han formado espontaneamente dos alianzas: una por lospaıses 1 y 3, con S1 = S3 = +1; y otra reducida al propio paıs 2, con S2 = −1. Loscostes respectivos para los paıses son:
Paıs 1: H13 +H12 = −G+G = 0.
Paıs 2: H21 +H23 = +G−G = 0.
Paıs 3: H31 +H31 = −G−G = −2G.
Solo el paıs 3 se halla en el mınimo absoluto de su medidor de conflicto, con −2G.Los otros paıses estan a 0, que no se corresponde con el valor mınimo del conflicto quepueden alcanzar. Ahora, entonces, es el turno de que muevan ficha los paıses que noestan comodos con su magnitud de conflicto. Y ambos paıses estan empujados al cambiode la misma manera, ya que ambos estan igual de separados en magnitud de su mınimoestable. A partir de aquı las posibilidades son multiples, y ningun cambio va a dejarcomodo, en su mınimo estable, a los tres paıses de forma simultanea. El ciclo no tiene finy puede ser impredecible, ya que se comprende la posibilidad de que dos paıses cambienposicion a la vez. Una ilustracion de esta dinamica sin fin puede verse en la figura 2. Lafigura 3 muestra, ademas, las posibles ramificaciones que pueden derivarse de una solasituacion tras un cambio de postura en los naciones que conforman el sistema.
Figure 2: Dinamica sin fin en el problema de los tres paıses.
4

Figure 3: Otra complicacion de la dinamica: Multiples opciones.
4 El problema de los 5 paıses.
Observamos como la situacion se ha complicado sobremanera, tornandose mas bien in-manejable, con la sola adicion de un paıs mas. ¿Que podemos esperar si aumentamosla lista de agentes al sistema? La dinamica se antoja infernal, sutil y totalmente impre-decible.
Como ejercicio relativo a la dinamica de coalicion-fragmentacion, vamos a estudiaralgunas de las posibilidades y la riqueza que aportarıa un sistema de 5 paıses. Partimos,como condicion inicial, de la situacion sugerida en la tarea expuesta en los apuntes declase. Esta puede observarse en la figura 4.
Computamos los costes asociados a cada paıs por estar en la situacion presente.
H1 = H12 +H13 +H14 = −(G12S2 +G13S3 +G14S4)S1 = −G,
H2 = H12 +H24 = −(G12S1 +G24S4)S2 = −2G,
H3 = H13 +H34 +H35 = −(G13S1 +G34S4 +G35S5)S3 = −3G,
H4 = H14 +H24 +H34 +H54 = −(G14S1 +G24S2 +G34S3 +G45S5)S4 = 0,
H5 = H35 +H45 = −(G35S3 +G45S4)S5 = 0.
Los resultados se corresponden con los de la imagen 4. El paıs 1 tiene coste −G, sumınimo es −3G, luego no esta en la situacion mas comoda posible para el. Serıa unode los candidatos a cambiar de postura. Los paıses 2 y 3, por contra, se hallan ensu coste individual mınimo, siendo respectivamente −2G y −3G. Los paıses 4 y 5tienen coste 0, pero este no es su mınimo, sino que es, respectivamente, −4G y −2G.
5

Figure 4: Problema de los cinco paıses a analizar.
A partir de aquı, si no se especifican mas detalles sobre la dinamica del proceso, losopciones son multiples. ¿Quien cambia de postura? ¿Aquel paıs que este mas incomodoglobalmente (aquel con la mayor diferencia entre su coste actual y optimo)? ¿Cualquierpaıs que no este a gusto con la situacion, independientemente de la magnitud de ladiferencia de coste respecto a su optimo? ¿Mueve uno por turno o varios a la vez?¿Permitimos una probabilidad de cambio de acuerdo con la magnitud de la diferencia decoste? ¿Permitimos cierta probabilidad de cambio de postura a paıses que esten en elmınimo de su coste? ¿Permitimos cambios de postura a paıses que, estando incomodos,el cambio les traera una mayor insatisfaccion? Como puede verse, las cuestiones sobre ladinamica son muy diversas, y segun que reglas permitamos, podemos tener una evolucionmuy variada.
Siguiendo una regla determinista de conocimiento del coste no local, el paıs quecambiarıa su postura dada la configuracion presentada en 4 serıa el paıs 4, pues tieneuna diferencia de coste respecto a su optimo de |∆G| = 4, la mayor de todas. Esto darıalugar a una alianza entre 2,3 y 4, por un lado, y 1 y 5, por el otro. Esta situacion serıaoptima para el paıs 1 y para el 5, que alcanzarıan ambos su mınimo, pero subirıa el costedel paıs 2 y del 3, sacandolo de su mınimo. Tambien podrıan darse cambios simultaneosy, por ejemplo, que ahora cambiaran el paıs 2 y 4 simultaneamente. La nueva alianzaentonces estarıa formada por los paıses 1,2,4 y 5, que aislarıan al 3. Esto devolverıa, sinembargo, al paıs 3 a su optimo, pero el resto de paıses no estarıan tan comodos, en mayoro menor medida. Puede seguirse esta secuencia descrita en el capıtulo correspondientede libro de Galam [1], para ver las infinitas posibilidades de la dinamica.
6
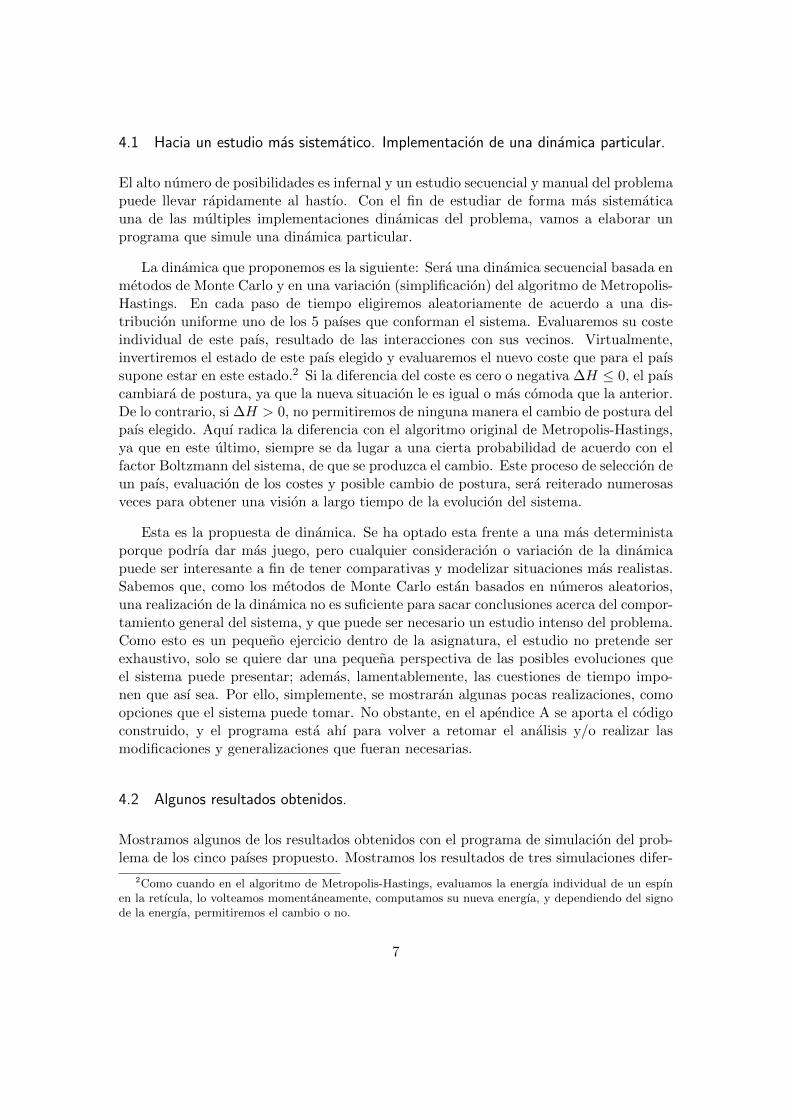
4.1 Hacia un estudio mas sistematico. Implementacion de una dinamica particular.
El alto numero de posibilidades es infernal y un estudio secuencial y manual del problemapuede llevar rapidamente al hastıo. Con el fin de estudiar de forma mas sistematicauna de las multiples implementaciones dinamicas del problema, vamos a elaborar unprograma que simule una dinamica particular.
La dinamica que proponemos es la siguiente: Sera una dinamica secuencial basada enmetodos de Monte Carlo y en una variacion (simplificacion) del algoritmo de Metropolis-Hastings. En cada paso de tiempo eligiremos aleatoriamente de acuerdo a una dis-tribucion uniforme uno de los 5 paıses que conforman el sistema. Evaluaremos su costeindividual de este paıs, resultado de las interacciones con sus vecinos. Virtualmente,invertiremos el estado de este paıs elegido y evaluaremos el nuevo coste que para el paıssupone estar en este estado.2 Si la diferencia del coste es cero o negativa ∆H ≤ 0, el paıscambiara de postura, ya que la nueva situacion le es igual o mas comoda que la anterior.De lo contrario, si ∆H > 0, no permitiremos de ninguna manera el cambio de postura delpaıs elegido. Aquı radica la diferencia con el algoritmo original de Metropolis-Hastings,ya que en este ultimo, siempre se da lugar a una cierta probabilidad de acuerdo con elfactor Boltzmann del sistema, de que se produzca el cambio. Este proceso de seleccion deun paıs, evaluacion de los costes y posible cambio de postura, sera reiterado numerosasveces para obtener una vision a largo tiempo de la evolucion del sistema.
Esta es la propuesta de dinamica. Se ha optado esta frente a una mas deterministaporque podrıa dar mas juego, pero cualquier consideracion o variacion de la dinamicapuede ser interesante a fin de tener comparativas y modelizar situaciones mas realistas.Sabemos que, como los metodos de Monte Carlo estan basados en numeros aleatorios,una realizacion de la dinamica no es suficiente para sacar conclusiones acerca del compor-tamiento general del sistema, y que puede ser necesario un estudio intenso del problema.Como esto es un pequeno ejercicio dentro de la asignatura, el estudio no pretende serexhaustivo, solo se quiere dar una pequena perspectiva de las posibles evoluciones queel sistema puede presentar; ademas, lamentablemente, las cuestiones de tiempo impo-nen que ası sea. Por ello, simplemente, se mostraran algunas pocas realizaciones, comoopciones que el sistema puede tomar. No obstante, en el apendice A se aporta el codigoconstruido, y el programa esta ahı para volver a retomar el analisis y/o realizar lasmodificaciones y generalizaciones que fueran necesarias.
4.2 Algunos resultados obtenidos.
Mostramos algunos de los resultados obtenidos con el programa de simulacion del prob-lema de los cinco paıses propuesto. Mostramos los resultados de tres simulaciones difer-
2Como cuando en el algoritmo de Metropolis-Hastings, evaluamos la energıa individual de un espınen la retıcula, lo volteamos momentaneamente, computamos su nueva energıa, y dependiendo del signode la energıa, permitiremos el cambio o no.
7
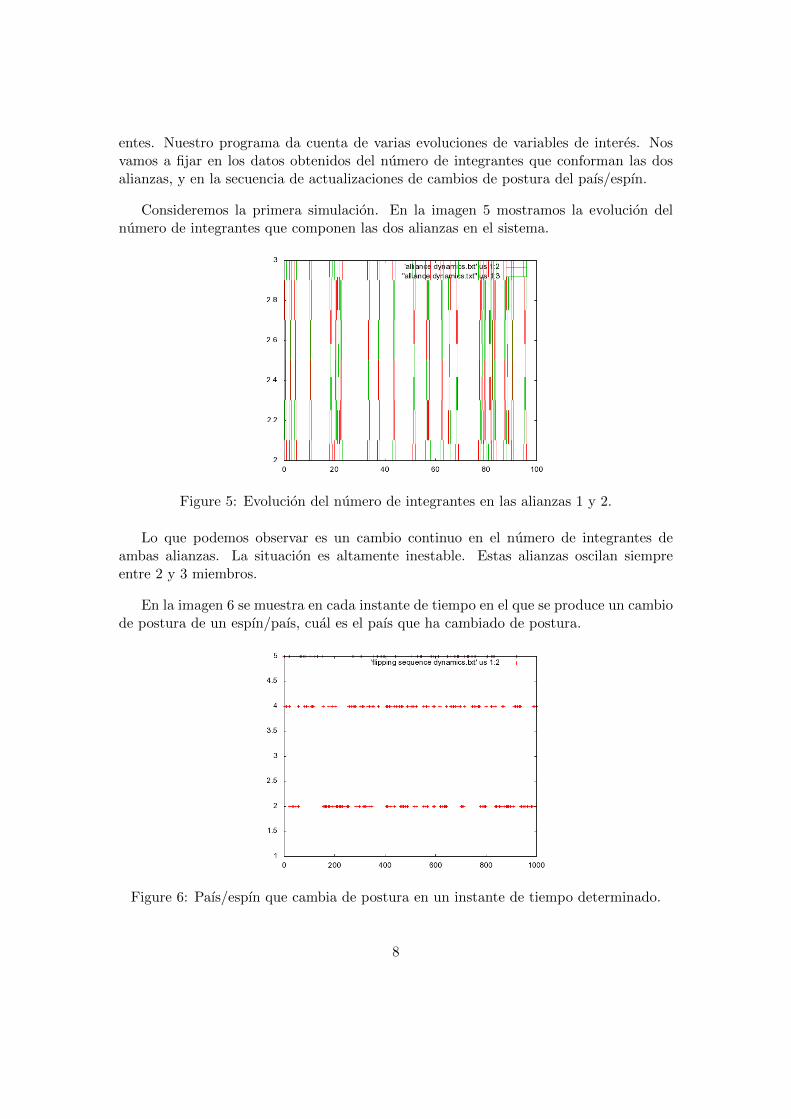
entes. Nuestro programa da cuenta de varias evoluciones de variables de interes. Nosvamos a fijar en los datos obtenidos del numero de integrantes que conforman las dosalianzas, y en la secuencia de actualizaciones de cambios de postura del paıs/espın.
Consideremos la primera simulacion. En la imagen 5 mostramos la evolucion delnumero de integrantes que componen las dos alianzas en el sistema.
Figure 5: Evolucion del numero de integrantes en las alianzas 1 y 2.
Lo que podemos observar es un cambio continuo en el numero de integrantes deambas alianzas. La situacion es altamente inestable. Estas alianzas oscilan siempreentre 2 y 3 miembros.
En la imagen 6 se muestra en cada instante de tiempo en el que se produce un cambiode postura de un espın/paıs, cual es el paıs que ha cambiado de postura.
Figure 6: Paıs/espın que cambia de postura en un instante de tiempo determinado.
8

Se puede ver que los espines que estan cambiando continuamente de postura son losespines 2, 4 y 5; nunca lo hacen 1 y 3. Esto es resultado de que los posibles cambios, dadala configuracion del sistema en tal momento, no les llevan a tener una funcion de costeque se aproxime mas a su optimo. Tambien puede verse entre los paıses que cambian depostura, que el paıs 5 cambia con menor frecuencia que los otros, 2 y 4.
Ejecutamos una segunda simulacion. En la imagen 7 se muestra de nuevo la evoluciondel numero de integrantes que componen las dos alianzas en el sistema.
Figure 7: Evolucion del numero de integrantes en las alianzas 1 y 2.
Ahora mostramos los cambios de postura dados en 8.
Figure 8: Paıs/espın que cambia de postura en un instante de tiempo determinado.
Mostremos una ultima simulacion. De nuevo, la imagen 9 muestra la evolucion delnumero de integrantes que componen las dos alianzas del sistema.
9

Figure 9: Evolucion del numero de integrantes en las alianzas 1 y 2.
Y los cambios de orientacion en la postura de los paıses, 10.
Figure 10: Paıs/espın que cambia de postura en un instante de tiempo determinado.
Los resultados en todas estas simulaciones son muy similares. Continuos cambiosde los paıses 2, 4, y 5, y consecuente inestabilidad en el sistema, que se traduce enunas alianzas que van alternando constamente su numero de componentes, entre 2 y3. Desde luego, otras reglas dinamicas diferentes, podrıan haber dado movimientos ygraficas distintas, pero el problema de la inestabilidad habrıa seguido en pie. Aquı hemosdado, sencillamente, una opcion de entre muchas alternativas.
10
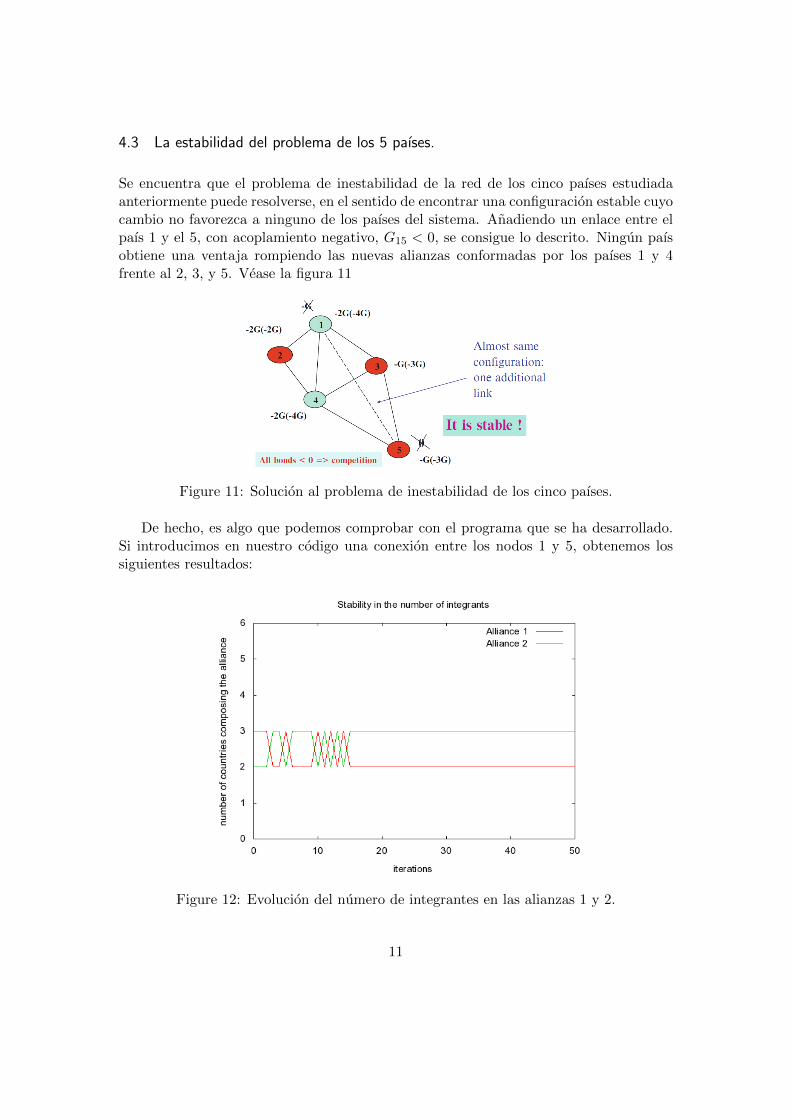
4.3 La estabilidad del problema de los 5 paıses.
Se encuentra que el problema de inestabilidad de la red de los cinco paıses estudiadaanteriormente puede resolverse, en el sentido de encontrar una configuracion estable cuyocambio no favorezca a ninguno de los paıses del sistema. Anadiendo un enlace entre elpaıs 1 y el 5, con acoplamiento negativo, G15 < 0, se consigue lo descrito. Ningun paısobtiene una ventaja rompiendo las nuevas alianzas conformadas por los paıses 1 y 4frente al 2, 3, y 5. Vease la figura 11
Figure 11: Solucion al problema de inestabilidad de los cinco paıses.
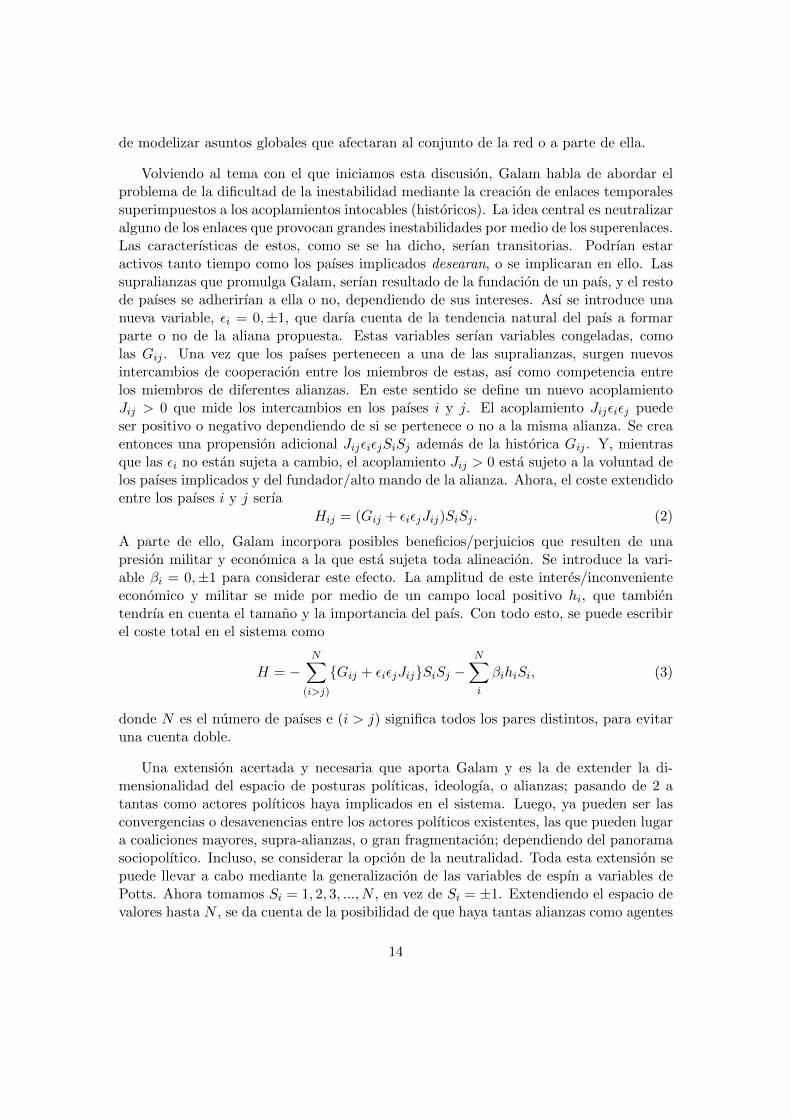
De hecho, es algo que podemos comprobar con el programa que se ha desarrollado.Si introducimos en nuestro codigo una conexion entre los nodos 1 y 5, obtenemos lossiguientes resultados:
Figure 12: Evolucion del numero de integrantes en las alianzas 1 y 2.
11

La figura 12 muestra que tras unos cambios en el numero de integrantes de ambasalianzas, rapidamente, tras la iteracion 15, la dinamica se estabiliza y nos da que laAlianza 1 esta comodamente instalada con 2 componentes, y la Alianza 2, esta igualmenteasentada con 3 componentes. Segun los datos que arroja nuestra simulacion, los paısesque componen la Alianza 1 son el paıs 1 y el paıs 4, con espın +1, mientras que los paısesque componen la Alianza 2 son el paıs 2, el paıs 3, y el paıs 5. Todos estos resultados secorresponden con los de Galam moestrados en 11.
Por ultimo, una imagen 13 sobre las actualizaciones de cambio de postura de lospaıses.
Figure 13: Paıs/espın que cambia de postura en un instante de tiempo determinado.
Se observa que, a partir de la iteracion 15, ningun paıs aparece como paıs que ac-tualiza su estado cambiando de postura. De hecho, la secuencia que lleva al equilibrioes muy sencilla. El paıs 1 intenta varios cambios de postura que parecen infructuosos.A continuacion lo intenta el paıs 2 hasta cuatro veces consecutivas, y le sigue un unicocambio en el paıs 1. Finalmente, y de inmediato, le toca al paıs 5, cuyo cambio depostura deja al sistema en equilibrio para el resto de la simulacion.
Nuestra dinamica consigue reproducir el resultado de estabilidad en el problemamodificado de los 5 paıses de Galam.
12

5 Algunas generalizaciones del modelo.
Retomando la variacion introducida en la seccion anterior, la creacion/destruccion dinamicade enlaces, acoplamientos de la forma Gij(t) puede ser una extension interesante delmismo. Supondrıa dar un valor dinamico a los acoplamientos entre los distintos paısesdel sistema. Estas funciones podrıan ir en la direccion de reforzar positivamente larelacion entre los paıses con el paso del tiempo, desgastarla, o directamente hacerla de-saparecer. Por supuesto, tambien, crear nuevas relaciones internacionales. Dependiendoya de los fenomenos o situaciones que interesara modelar, ya se podrıa entrar en detallede la forma funcional de estos coeficientes de acoplamiento G(t). Este planteamiento,realmente, no es novedoso y muchos modelos de dinamica social en redes complejasincorporan esta coevolucion de la topologıa de la red con la propia dinamica social in-troducida en el modelo. Por ejemplo, depediendo del estado de sus vecinos, un nodopodrıa decidir entre adoptar la postura de alguno de sus vecinos o destruir una relacionentre alguno de sus estos. Es lo que se vendrıa a denominar fenomeno de plasticidad.Existen ejemplos de estas consideraciones [8], [9],[10].
Otras extensiones o generalizaciones al modelo podrıa ser la introduccion de direc-cionalidad o ruptura de la simetrıa en las relaciones: Gij 6= Gji. Esto significarıa quela relacion del paıs j con el i, desde el punto de vista del paıs i, no serıa la misma quela relacion del paıs i, con la relacion del paıs j, desde el punto de vista de este ultimo.Esta asimetrıa en las relaciones puede ser resultado de una asimetrıa en la informaciony consideracion que un paıs tiene del otro, y viceversa. A pesar de esta en un mundoglobal y enormemente comunicado; los servicios de inteligencia de cada nacion puedenestar bajo el control de informacion sensible de terceros, que puede provocar cambios depercepcion en la relaciones entre naciones. Esta asimetrıa tambien se podria ver comola introduccion de una red bideraccional o digrafo, con enlaces ponderados. Y hablandode redes, por supuesto, la topologıa de la red del sistema de paıses tambien puede serun aspecto interesante a observar: comparar la facilidad con la que se pueden alcanzarcoaliciones estables (formacion de clusteres) en redes tipo scale-free, pequeno-mundo,grafos aleatorios, o completamente conexas.
A parte de funciones dependientes del tiempo, o sujetas a un valor u otro dependi-endo del periodo historico, los acoplamientos G tambien podrıan ser funciones analıticasde otras variables importantes en aspectos geopolıticos, en vez de coeficientes fijos demayor o menor magnitud, como prescribe Galam. Si bien, debido de nuevo a la glob-alizacion mundial y a la avence tecnologico, un parametro de distancia geografica d yano serıa tan crucial como para describir el estado de las naciones en el mundo antiguo,podrıa hablarse de distancia en un espacio abstracto (como se hace en teorıa de redescomplejas), y establecer una dependencia funcional G = G(dij), que dependerıa de ladistancia/afinidad de las naciones i y j en un espacio abstracto, que podrıa venir a rep-resentar: distancia ideologıa, lazos historicos, distancia cultural, interes economico, etc.Tambien serıa valorable la introduccion de campos externos/perturbaciones como forma
13
de modelizar asuntos globales que afectaran al conjunto de la red o a parte de ella.
Volviendo al tema con el que iniciamos esta discusion, Galam habla de abordar elproblema de la dificultad de la inestabilidad mediante la creacion de enlaces temporalessuperimpuestos a los acoplamientos intocables (historicos). La idea central es neutralizaralguno de los enlaces que provocan grandes inestabilidades por medio de los superenlaces.Las caracterısticas de estos, como se se ha dicho, serıan transitorias. Podrıan estaractivos tanto tiempo como los paıses implicados desearan, o se implicaran en ello. Lassupralianzas que promulga Galam, serıan resultado de la fundacion de un paıs, y el restode paıses se adherirıan a ella o no, dependiendo de sus intereses. Ası se introduce unanueva variable, εi = 0,±1, que darıa cuenta de la tendencia natural del paıs a formarparte o no de la aliana propuesta. Estas variables serıan variables congeladas, comolas Gij . Una vez que los paıses pertenecen a una de las supralianzas, surgen nuevosintercambios de cooperacion entre los miembros de estas, ası como competencia entrelos miembros de diferentes alianzas. En este sentido se define un nuevo acoplamientoJij > 0 que mide los intercambios en los paıses i y j. El acoplamiento Jijεiεj puedeser positivo o negativo dependiendo de si se pertenece o no a la misma alianza. Se creaentonces una propension adicional JijεiεjSiSj ademas de la historica Gij . Y, mientrasque las εi no estan sujeta a cambio, el acoplamiento Jij > 0 esta sujeto a la voluntad delos paıses implicados y del fundador/alto mando de la alianza. Ahora, el coste extendidoentre los paıses i y j serıa
Hij = (Gij + εiεjJij)SiSj . (2)
A parte de ello, Galam incorpora posibles beneficios/perjuicios que resulten de unapresion militar y economica a la que esta sujeta toda alineacion. Se introduce la vari-able βi = 0,±1 para considerar este efecto. La amplitud de este interes/inconvenienteeconomico y militar se mide por medio de un campo local positivo hi, que tambientendrıa en cuenta el tamano y la importancia del paıs. Con todo esto, se puede escribirel coste total en el sistema como
H = −N∑
(i>j)
{Gij + εiεjJij}SiSj −N∑i
βihiSi, (3)
donde N es el numero de paıses e (i > j) significa todos los pares distintos, para evitaruna cuenta doble.
Una extension acertada y necesaria que aporta Galam y es la de extender la di-mensionalidad del espacio de posturas polıticas, ideologıa, o alianzas; pasando de 2 atantas como actores polıticos haya implicados en el sistema. Luego, ya pueden ser lasconvergencias o desavenencias entre los actores polıticos existentes, las que pueden lugara coaliciones mayores, supra-alianzas, o gran fragmentacion; dependiendo del panoramasociopolıtico. Incluso, se considerar la opcion de la neutralidad. Toda esta extension sepuede llevar a cabo mediante la generalizacion de las variables de espın a variables dePotts. Ahora tomamos Si = 1, 2, 3, ..., N , en vez de Si = ±1. Extendiendo el espacio devalores hasta N , se da cuenta de la posibilidad de que haya tantas alianzas como agentes
14

en el sistema, es decir, que no haya ninguna alianza efectiva. Es importante enfatizar elcambio: En los modelos estudiados en esta tarea, el numero de alianzas estaba fijado en2, y por tanto era un parametro exogeno del problema. Ahora, el numero de coalicionesq es un grado de libertad interno, que puede ir de 1 a N . Y sera por medio de la res-olucion de la dinamica como podremos determinar el numero de coaliciones que se hanestablecido en el sistema. No es un conocimiento a priori.
Para preservar la contabilidad tipo Ising de estar o no en la misma alianza usandoel producto SiSj = ±1, lo que se hace es sustituir a tal producto por una delta deKronecker, δSi,Sj , que es bien sabido que
δSi,Sj =
{1 , Si = Sj0 , Si 6= Sj
. (4)
En consecuencia, podemos escribir el coste producido por pares de intercambios historicoscomo
Hij = −N∑i>j
GijδSi,Sj . (5)
El valor es igual a −Gij cuando Si y Sj pertenecen a la misma coalicion, y cero de otracualquier otra forma. Para el caso bimodal se tendrıa ±Gij , y para el caso multimodal−Gij o 0.
Una vez los ingredientes del modelo esten definidos, el asunto clave serıa la determi-nacion de los acoplamientos Gij . O de los parametros asociados a las funciones G = G(d)(o cualquier otra generalidad), en el caso del uso de acoplamientos mas generales. ComoGalam afirma, no existe ninguna receta hasta la fecha, que asegure la bonanza de unosvalores parametricos determinados para los acoplamientos, solo sugerencias. Del estudiodel desmembramiento de la antigua Yugoslavia [6], se sugiere expresar los acoplamientoscomo
Gij =
8∑k,l
qikqjlwkl, (6)
donde qik representa el porcentaje del grupo etnico k en la entidad i, y wkl representala propensidad a pares entre el grupo etnico k y el l. Para k = l, wkk = +1. Para k 6= l,las wkl se computan como la suma de dos terminos; uno para la religion, y el otro parael lenguaje: wkl = ωreligion(k, l) +ωlenguaje(k, l). Desde luego, esta formula para expresarlos acoplamiento entre naciones no tiene porque ser general, o ha de tener importanciageneral, sino que dependiendo de las causas subyacientes a los fenomenos historicos en-tre naciones/grupos sociales que desearamos estudiar, habrıa que dar relevancia a unosfactores sobre otros, incorporandolos en la prescripcion de los acoplamientos Gij . En elcaso de Yugoslavia, la expresion de Gij en funcion componentes que expresan la relacionentre grupos etnicos y su propensidad, a su vez medida en afinidad religiosa y lenguaje,es muy interesante y acertada. Yugoslavia era una federacion de republicas, con fronterastrazadas a lo largo de lıneas etnicas e historicas. El motivo de divergencias entre etnias,
15

minorıas etnicas descuidadas, fue uno de los disparadores definitivos del conflicto total:la guerra de los Balcanes. Desgraciadamente, los motivos etnicos y religiosos no son unaparticularidad del caso Yugoslavo, sino hecho comun en la historia mundial. Similaresconsideraciones de acoplamientos Gij podrıan tenerse en cuenta para abordar los con-flictos en Oriente Medio: el enfrentamiento de Israel-Palestina (y su entorno arabe), olas disputas intra-islamicas (chiitas-sunitas). De la misma manera que el modelo aquıexpuesto se ha utilizado para analizar la deriva yugoslava, podrıa introducirse en re-giones del mundo que, no siendo territorios nacionales distintos u oficiales, presentenuna importante diversidad/tension entre etnias o grupos culturales, en general, difer-entes. Otro aspecto a considerar para buscar espacios/contextos de aplicacion de estosmodelos de coalicion/fragmentacion es la evolucion del tipo de conflicto en el mundo.Esto es, desde finales del siglo XX, las guerras han sufrido una transformacion, pasandoa predominar el denominado conflicto asimetrico. Conflictos entre agentes militares demuy distinto poder o nivel: enfrentamientos de un estado frente a facciones terroristas.Un peligroso y triste ejemplo de actualidad es la generacion y progresion de la faccionfundamentalista del Estado Islamico de Iraq y Levante en la region de Oriente Medio. Laaplicacion de estos modelos a estos tipos de conflictos requerıa una mayor complejidaden el tratamiento. Quizas serıa necesario un abordaje absoluto por medio de elementosde redes complejas. E hilando con estas propuestas, se podrıa trascender de la consid-eracion de espines o nodos meramente nacionales, y abordar la situacion intranacionalde interes por medio de redes complejas, cuyos elementos serıan supernodos (agentesindividuales agrupados, en aras de la simplificacion) que recogerıan, estadısticamente,las distintas sensibilidades sociologicas (etnicas, culturales: lengua, religion, ideologicas),economicas, y tambien factores geograficos, dentro de las regiones consideradas, y queinteractuarıan con mayor/menor afinidad dependiendo de las afinidades en los distintosfactores expuestos. Respecto al analisis de la situacion interna de paıses, Galam con-sidera, con el modelo que aquı hemos revisado, el escenario de una nacion gigante comoChina en [5],[4]. En este sentido, tambien serıa interesante considerar el problema deotras naciones gigantes, como Estados Unidos, o la Rusia actual.
Otra actitud tıpica en estos dıas es la que hace primar el interes economico-comercialen las relaciones de los paıses por encima de cualquier otro motivo mas identitario otradicional. Hablo de relaciones entre naciones que se hallarıan, supuestamente, enlas antıpodas ideologıas y culturales (concepcion del estado y de la democracia, re-ligion, lengua, cosmovision), y que, sin embargo, poseen buenas e interesadas relacionesdiplomaticas: vease los casos de EEUU y Arabia Saudı, u Occidente, en general, conlos paıses de la penısula arabiga agraciados por el recurso del petroleo. Las diferenciasentre estas naciones son muy evidentes, y quizas deberıa haber motivos razonados parala existencia de tensiones entre las mismas, sin embargo, llevados por el modo de vidade las comodidades, el lujo, y el interes financiero, estos paıses no se pisan entre sı, yaque ambos tienen recursos que ofrecer al contrario, y eso es lo que les interesa. Ası,pues, la afinidad comercial y la necesidad de recursos de una nacion que la otra carece,pueden ser factores interesantes y claves de los que dar cuenta a la hora de estudiar ladinamica de relaciones entre ciertos conglomerados de naciones. Hoy en dıa, la inmensa
16

mayorıa de las alianzas que se forjan ya no son belicas/militares sino tratados com-erciales/economicos; como el TTIP (Transatlantic Trade and Investment Partnership),entre EEUU y los paıses miembros de la UE, y cuya aprobacion se esta evaluando desar-rollando en este ano. Se hace pues obligatoria la consideracion e introduccion de factoresmacroeconomicos y afinidad economica, pero tambien de caracter social e ideologico, enlos acoplamientos Gij entre los grupos de agentes tratados, para observar su dinamica.
En esta discusion nos hemos centrado en el problema de dinamica e inestabilidadesde naciones o entramados sociales de caracter estatal, pero en otros contextos de apli-cacion, desde luego, las ideas aquı expuestas se verıan enormemente modificadas y laforma de modelizar los acoplamientos Gij y las relaciones entre agentes, cambiarıa con-secuentemente, dando lugar a nuevas consideraciones y motivaciones.
A Codigo para la simulacion del problema de los cinco paıses.
Se adjunta el codigo que se ha desarrollado expresamente para estudiar el problemapropuesto sobre la estabilidad de los cinco paıses. La dinamica es muy sencilla y ya sedescribio en 4.1. Esta se desarrolla en la funcion main(). La funcion initial stateestablece la configuracion inicial de los paıses, si adoptan la postura +1 o -1. Por defectose toman las posturas que el enunciado del problema propone. La funcion networkconstruye la topologıa del problema. Es una funcion poco generica, muy especıficapara el problema dado, por lo que una generalizacion del mismo a redes mas complejasrequerirıa construir una nueva funcion, dependiendo del tipo de substrato que se deseara.En esta funcion network, el array coupling matrix da valor G si existe enlace entrelos paıses en cuestion, y 0 si no es el caso. La funcion state informa sobre el estadode las alianzas en el sistema. Los individuos que comparten la misma postura +1(-1),estan en la misma alianza; como solo hay dos posturas posibles, este mismo es el numerode alianzas en el sistema. La funcion cost computation evalua el coste individualdel espın que entre en el argumento (del espın que se elija de acuerdo al generador denumeros pseudoaleatorios al comienzo del proceso dinamico). La funcion global costcomputation computa el coste de todos los espines/paıses en el sistema. La dinamicade pseudo-Metropolis, o de aceptacion/rechazo total, esta insertada directamente en lafuncion main. Esta podrıa escribirse como un modulo aparte del programa, en caso deque se quisieran presentar opciones dinamicas alternativas. Hay una funcion extra, por sise desea comprobar otro tipo de dinamica, esta es la que da la funcion deterministicdynamics. Esta funcion calcula el paıs que presenta una diferencia de coste mayorrespecto a su mınimo particular, de forma que el paıs que mas incomodo se encuentresera unica y automaticamente el que cambie de postura, sin tener en cuenta si mejorarao no su situacion. Los resultados expuestos solo han llevado a cabo con la dinamica deMonte Carlo de aceptacion/rechazo.
Este es el codigo:
17

#include <s t d i o . h>#include <s t d l i b . h>#include <math . h>#include <time . h>
void i n i t i a l s t a t e ( int ∗ sp in ) ;void s t a t e ( int N, int t , int a l l i a n c e 1 , int a l l i a n c e 2 , int ∗ spin , int ∗ a l l i a n c e , FILE∗ a l l i ancedynamic s ) ;void network ( int N, f loat G, f loat ∗opt H , int ∗∗ connec t i v i ty , f loat ∗∗ coup l ing matr ix ) ;f loat cost computat ion ( int N, signed int S , int input , int ∗ spin , f loat ∗∗ coup l ing matr ix ) ;void g l oba l co s t computa t i on ( int N, int ∗ spin , f loat ∗H, f loat ∗opt H , f loat ∗ d i f f H , f loat ∗∗ coup l ing matr ix ) ;int de te rmin i s t i c dynamic s ( int N, f loat ∗H) ;
int main ( ){
FILE∗ a l l i ancedynamic s ; a l l i ancedynamic s=fopen ( ” a l l i a n c e dynamics . txt ” , ”w” ) ;FILE∗ a l l i a n c e s t a t e ; a l l i a n c e s t a t e=fopen ( ” a l l i a n c e s t a t e . txt ” , ”w” ) ;FILE∗ spindynamics ; spindynamics=fopen ( ” sp in dynamics . txt ” , ”w” ) ;FILE∗ costdynamics ; costdynamics=fopen ( ” co s t dynamics . txt ” , ”w” ) ;FILE∗ co s td i f f dynami c s ; c o s td i f f dynamic s=fopen ( ” co s t d i f f e r e n c e dynamics . txt ” , ”w” ) ;FILE∗ f l i pdynamic s ; f l i pdynamic s=fopen ( ” f l i p p i n g sequence dynamics . txt ” ) ;
srand ( time (NULL) ) ;int N, t , t max , input , sp in to t , i , j , S , a l l i a n c e 1 , a l l i a n c e 2 ;f loat G, H 0 , H f , H tot ;
N=5;t =0;s p i n t o t =0;a l l i a n c e 1 =0;a l l i a n c e 2 =0;t max=20;G=−1.0;H tot =0.0 ;
int ∗ sp in ;sp in=( int ∗) mal loc ( (N+1)∗ s izeof ( int ) ) ;int ∗ a l l i a n c e ;a l l i a n c e =( int ∗) mal loc ( (N+1)∗ s izeof ( int ) ) ;f loat ∗H;H=( f loat ∗) mal loc ( (N+1)∗ s izeof ( f loat ) ) ; // c o s t f u n c t i o nf loat ∗opt H ;opt H=( f loat ∗) mal loc ( (N+1)∗ s izeof ( f loat ) ) ; // s t a b l e optimum c o s t f u n c t i o n
18
f loat ∗ d i f f H ;d i f f H =( f loat ∗) mal loc ( (N+1)∗ s izeof ( f loat ) ) ; // to a l l o c a t e the l a r g e s t i n d i v i d u a l c o s t f u n c t i o n
f loat ∗∗ coup l ing matr ix ;coup l ing matr ix =( f loat ∗∗) mal loc ( (N+1)∗ s izeof ( f loat ) ) ;for ( j =1; j<=N; j++)coup l ing matr ix [ j ]=( f loat ∗) mal loc ( (N+1)∗ s izeof ( f loat ) ) ;for ( i =1; i<=N; i ++){for ( j =1; j<=N; j++){coup l ing matr ix [ i ] [ j ]=0 .0 ;}}
i n i t i a l s t a t e ( sp in ) ;network (N,G, opt H , connec t i v i ty , coup l ing matr ix ) ;
while ( t<t max ){
s t a t e (N, t , a l l i a n c e 1 , a l l i a n c e 2 , spin , a l l i a n c e , a l l i ancedynamic s ) ;f p r i n t f ( a l l i a n c e s t a t e , ”%d %d %d %d %d %d \n” , t , a l l i a n c e [ 1 ] , a l l i a n c e [ 2 ] , a l l i a n c e [ 3 ] , a l l i a n c e [ 4 ] , a l l i a n c e [ 5 ] ) ;f p r i n t f ( spindynamics , ”%d %d %d %d %d %d %d \n” , t , sp in [ 1 ] , sp in [ 2 ] , sp in [ 3 ] , sp in [ 4 ] , sp in [ 5 ] , s p i n t o t ) ;f p r i n t f ( costdynamics , ”%d %f %f %f %f %f %f \n” , t ,H[ 1 ] ,H[ 2 ] ,H[ 3 ] ,H[ 4 ] ,H[ 5 ] , H tot ) ;f p r i n t f ( co s td i f fdynamic s , ”%d %f %f %f %f %f \n” , t , d i f f H [ 1 ] , d i f f H [ 2 ] , d i f f H [ 3 ] , d i f f H [ 4 ] , d i f f H [ 5 ] ) ;
// input=d e t e r m i n i s t i c d y n a m i c s (N, ) ; sp in [ input ]=−sp in [ input ] ;input=1+rand()%N;S=sp in [ input ] ;H 0=cost computat ion (N, S , input , spin , coup l ing matr ix ) ;S=−sp in [ input ] ;H f=cost computat ion (N, S , input , spin , coup l ing matr ix ) ;
i f ( H f−H 0<=0){ sp in [ input]=−sp in [ input ] ; f p r i n t f ( f l ipdynamics , ”%d %d \n” , t , input ) ; }
g l oba l co s t computa t i on (N, spin ,H, opt H , d i f f H , coup l ing matr ix ) ;
s p i n t o t=sp in [1 ]+ sp in [2 ]+ sp in [3 ]+ sp in [4 ]+ sp in [ 5 ] ;H tot=H[1]+H[2]+H[3]+H[4]+H[ 5 ] ;
a l l i a n c e 1 =0;a l l i a n c e 2 =0;
t++;}
f c l o s e ( a l l i ancedynamic s ) ; f c l o s e ( a l l i a n c e s t a t e ) ; f c l o s e ( spindynamics ) ; f c l o s e ( costdynamics ) ; f c l o s e ( co s td i f f dynami c s ) ; f c l o s e ( f l i pdynamic s ) ;return 0 ;
}void i n i t i a l s t a t e ( int ∗ sp in )
19
{sp in [ 1 ] = 1 ; sp in [2]=−1; sp in [3]=−1; sp in [ 4 ] = 1 ; sp in [ 5 ] = 1 ;
}
void s t a t e ( int N, int t , int a l l i a n c e 1 , int a l l i a n c e 2 , int ∗ spin , int ∗ a l l i a n c e , FILE∗ a l l i ancedynamic s ){
int i ;
for ( i =1; i<=N; i++){
i f ( sp in [ i ]==1){
a l l i a n c e 1=a l l i a n c e 1 +1;a l l i a n c e [ i ]=1;
}else{
a l l i a n c e 2=a l l i a n c e 2 +1;a l l i a n c e [ i ]=2;
}}
f p r i n t f ( a l l i ancedynamics , ”%d %d %d \n” , t , a l l i a n c e 1 , a l l i a n c e 2 ) ;}
void network ( int N, f loat G, f loat ∗opt H , int ∗∗ connec t i v i ty , f loat ∗∗ coup l ing matr ix ){
coup l ing matr ix [ 1 ] [ 1 ] = 0 ; coup l ing matr ix [1 ] [2 ]=−G; coup l ing matr ix [1 ] [3 ]=−G; coup l ing matr ix [1 ] [4 ]=−G; coup l ing matr ix [ 1 ] [ 5 ] = 0 ;coup l ing matr ix [2 ] [1 ]=−G; coup l ing matr ix [ 2 ] [ 2 ] = 0 ; coup l ing matr ix [ 2 ] [ 3 ] = 0 ; coup l ing matr ix [2 ] [4 ]=−G; coup l ing matr ix [ 2 ] [ 5 ] = 0 ;coup l ing matr ix [3 ] [1 ]=−G; coup l ing matr ix [ 3 ] [ 2 ] = 0 ; coup l ing matr ix [ 3 ] [ 3 ] = 0 ; coup l ing matr ix [3 ] [4 ]=−G; coup l ing matr ix [3 ] [5 ]=−G;coup l ing matr ix [4 ] [1 ]=−G; coup l ing matr ix [4 ] [2 ]=−G; coup l ing matr ix [4 ] [3 ]=−G; coup l ing matr ix [ 4 ] [ 4 ] = 0 ; coup l ing matr ix [4 ] [5 ]=−G;coup l ing matr ix [ 5 ] [ 1 ] = 0 ; coup l ing matr ix [ 5 ] [ 2 ] = 0 ; coup l ing matr ix [5 ] [3 ]=−G; coup l ing matr ix [5 ] [4 ]=−G; coup l ing matr ix [ 5 ] [ 5 ] = 0 ;
opt H [1]=−3∗G; opt H [2]=−2∗G; opt H [3]=−3∗G; opt H [4]=−4∗G; opt H [5]=−2∗G;}
f loat cost computat ion ( int N, signed int S , int input , int ∗ spin , f loat ∗∗ coup l ing matr ix ){
int j ;f loat sum ;sum=0.0;
for ( j =1; j<=N; j++){sum=sum−coup l ing matr ix [ input ] [ j ]∗S∗ sp in [ j ] ; }
20
return sum ;}
void g l oba l co s t computa t i on ( int N, int ∗ spin , f loat ∗H, f loat ∗opt H , f loat ∗ d i f f H , f loat ∗∗ coup l ing matr ix ){
int i , j ;f loat sum ;
for ( i =1; i<=N; i++){
sum=0.0;for ( j =1; j<=N; j++)sum=sum−coup l ing matr ix [ i ] [ j ]∗ sp in [ i ]∗ sp in [ j ] ;H[ i ]=sum ;d i f f H [ i ]=H[ i ]−opt H [ i ] ;
}}
int de te rmin i s t i c dynamic s ( int N, f loat ∗H){
int i , j , a , b , c , p laye r ;int ∗ r ep lay ;
r ep lay =( int ∗) mal loc ( (N+1)∗ s izeof ( int ) ) ;for ( i =1; i<=N; i++)rep lay [ i ]=0;
p laye r =1, r ep lay [ 1 ] = 1 ;a=1,b=0, i =2;
for ( j =1; j<N; j++){
i f (H[ p laye r ]<H[ j +1]){
p layer=j +1; r ep lay [1 ]= j +1;for ( i =2; i<=N; i++)rep lay [ i ]=0;i =2;
}}for ( j =1; j<=N; j++){
i f ( j != p layer ){
i f (H[ p laye r ]==H[ j ] ) { r ep lay [ i ]= j ; i ++; b−−; a++;}}
21
}i f (b<0){c=1+rand ()%(a ) ; p laye r=rep lay [ c ] ; }
return p layer ;}
References
[1] Galam, S. Sociophysics: A Physicist’s Modeling of Psycho-political Phenomena, Un-derstanding Complex Systems. Springer Science, 2012.
[2] Koroutcheva, E., Apuntes de la asignatura Sociofısica, UNED 2015.
[3] Galam, S. Comment on A landscape theory of aggregation, British J. Political Sci-ences 28, 411–412 (1998)
[4] Galam, S. Fragmentation versus stability in bimodal coalitions, Physica A 230,174–188 (1996)
[5] Galam, S. Spontaneous coalitions forming: a model from spin glass, arXiv:condmat/9901022, I. Kondor and J. Kertesz, Eds., Budapest (1999)
[6] Florian, R. & Galam, S. Optimizing Conflicts in the Formation of Strategic Alliances,Eur. Phys. J. B 16, 189 (2000)
[7] Galam, S. Spontaneous Coalition Forming. Why Some Are Stable?, Lecture Notes inComputer Science. 5th International Conference on Cellular Automata for Researchand Industry, Springer-Verlag, Heidelberg, 1–9 vol. 2493 (2002)
[8] Newman, M.E.J., Holme, P. Nonequilibrium phase transition in the coevolution ofnetworks and opinions (2006)
[9] Vazquez, F. Opinion dynamics on coevolving networks. Max Planck Institute for thePhysics of Complex Systems.
[10] Jia P., Mirta Batabaei, A., Friedkin N.E., Bullo, F. Opinion dynamics and theevolution of social power in influence networks.
22




















