DETERIORAC ̧A ̃O DO DESEMPENHO FRENTE A` ROBUSTEZ: O CASO DO CONTROLE DINAˆMICO DE VIBRAC ̧O...
6
DETERIORAC ¸ ˜ AO DO DESEMPENHO FRENTE ` A ROBUSTEZ: O CASO DO CONTROLE DIN ˆ AMICO DE VIBRAC ¸ ˜ OES DE UMA VIGA ELIZABETH V. CERNA, MARCOS A. DA SILVEIRA, RUBENS SAMPAIO Departamentos de Engenharia Mecˆanica e de Engenharia El´ etrica, Pontif´ ıcia Universidade Cat´olica do Rio de Janeiro Rua Marquˆ es de S˜ao Vicente, 225, 22453-900, Rio de Janeiro, RJ E-mails: [email protected], [email protected], [email protected] Resumo— Mostra-se que a maior exigˆ encia de robustez leva ` a deteriora¸c˜ao do desempenho do sistema con- trolado. De fato, estuda-se o caso do controle dinˆamico de uma viga apoiada, sistema de dimens˜ao infinita onde a exigˆ encia de robustez ´ e necess´aria para que o controlador, projetado para uma aproxima¸c˜ao de dimens˜ao finita do sistema original, seja eficaz. Abstract— It is shown that the increase of robustness leads to a loss of performance of the controlled system. In fact, it was studied the dynamical control of the vibrations of a beam simply supported at both ends. This is a system of infinite dimension whose requirements of robustness of the controller, designed for an finite dimensional approximation of the beam, is essential for its effectiveness. Key Words— Robust control; Mixed H 2 /H ∞ problems; Infinite-dimensional linear systems. 1 Nomenclatura Aforaanomenclaturamatem´aticahabitual, ser˜ao usadasasseguintesdefini¸c˜oes: inf K∈Ω {J [K]} denota o ´ ınfimo de J [K] sobre o conjunto Ω. f (s) ∞ ≡ inf ω∈ {|f (jω)|}, H ∞ + ≡{fun¸c˜oesanal´ ıticas e limitadas no semi- plano complexo ` a direita}, um espa¸co de Banach na norma . ∞ definida anteriormente. H 2,-1 + ≡{fun¸c˜oes f (s) anal´ ıticas no semi- plano complexo ` a direita tais que (1 + s) -1 f (s) ∈ H 2 + }, um espa¸co de Hilbert estudado em (da Sil- veira e Ades, 2001). H 2 + ´ e a classe de Hardy das fun¸c˜oes anal ´ iticas no semiplano complexo ` a direita dotada da norma quadr´atica sobre o eixo imagin´ario. Sobre classes de Hardy consultar (Vidyasagar, 1985). K * (s)= K T (-s), a para-conjugada da ma- triz K(s). Tr{K} denota o tra¸co da matriz K. δ(x - x e ) denota a distribui¸c˜ao de Dirac no ponto x e . 2 Introdu¸c˜ ao Mostra-se, neste artigo, como a maior exigˆ encia de robustez (relativa ` a estabilidade) pode levar ` a de- teriora¸c˜ao do desempenho da planta controlada. Para tal, ser´a analisado o comportamento tran- sit´orio de uma viga apoiada sob o efeito de con- troladores dinˆamicos de vibra¸c˜ao projetados por t´ ecnicas H 2 /H ∞ , variando-se o conjunto de per- turba¸c˜oesadmiss´ ıveis. Sendo a planta de dimens˜ao finita, a quest˜ao da robustez ´ e fundamental: haver´a sempre dinˆamica desprezada no c´alculo do controlador. Portanto este dever´a estabilizar, ao mesmo tempo, a planta aproximada utilizada em seu c´alculo e a planta original, esta ´ ultima devendo estar contida no conjunto de plantas perturbadas admiss´ ıveis. Mais ainda, o controlador ´ otimo sendo de di- mens˜ao infinita (salvo em casos triviais), dever´a ser aproximado por um controlador de dimens˜ao finita, que seja admiss´ ıvel para o conjunto de plan- tas perturbadas. Na segunda se¸c˜ao ser˜ao descritos sucinta- mente a planta a ser controlada e o problema de controle H 2 /H ∞ associado, seguindo (Cerna, 2001), (Cerna, da Silveira e Sampaio, 2002) e (da Silveira, 2001b). Na terceira se¸c˜ao ser´a descrito o experimento e seus resultados. A ´ ultimase¸c˜aoco- menta algumas quest˜oes relacionadas ` a exigˆ encia de robustez e ` a aproxima¸c˜ao de sistemas lineares de dimens˜ao finita. 3 Descri¸c˜ ao da Planta e do Problema de Controle A planta ´ e uma viga de Euler-Bernoulli simples- mente apoiada e amortecida, como modelada em (Meirovitch, 1997) e estudada em (Cerna, 2001). Ser´a suposta uma perturba¸c˜ao pontual, sendo o sensor e o atuador (piezoel´ etricos) na mesma posi¸c˜ao(”problemacolocado”). Para referˆ encia, a equa¸c˜ao do deslocamento transversal w(t, x)´ e dada por: a ∂ 2 w ∂t 2 (t, x)+b ∂w ∂t (t, x)+c ∂ 4 w ∂x 4 (t, x)= u(t)δ(x-x e ) , para t ∈ [0, ∞)e x ∈ (0,L), a, b e c dados do problema, x e aposi¸c˜aodoatuador, u(t) o sinal de controle. As seguintes condi¸c˜oes iniciais e de contorno tamb´ em s˜ao exigidas:
-
Upload
puc-rio-br -
Category
Documents
-
view
0 -
download
0
Transcript of DETERIORAC ̧A ̃O DO DESEMPENHO FRENTE A` ROBUSTEZ: O CASO DO CONTROLE DINAˆMICO DE VIBRAC ̧O...

DETERIORACAO DO DESEMPENHO FRENTE A ROBUSTEZ: O CASO DOCONTROLE DINAMICO DE VIBRACOES DE UMA VIGA
ELIZABETH V. CERNA, MARCOS A. DA SILVEIRA, RUBENS SAMPAIO
Departamentos de Engenharia Mecanica e de Engenharia Eletrica, Pontifıcia Universidade Catolica doRio de Janeiro
Rua Marques de Sao Vicente, 225, 22453-900, Rio de Janeiro, RJE-mails: [email protected], [email protected], [email protected]
Resumo— Mostra-se que a maior exigencia de robustez leva a deterioracao do desempenho do sistema con-trolado. De fato, estuda-se o caso do controle dinamico de uma viga apoiada, sistema de dimensao infinita ondea exigencia de robustez e necessaria para que o controlador, projetado para uma aproximacao de dimensao finitado sistema original, seja eficaz.
Abstract— It is shown that the increase of robustness leads to a loss of performance of the controlled system.In fact, it was studied the dynamical control of the vibrations of a beam simply supported at both ends. This is asystem of infinite dimension whose requirements of robustness of the controller, designed for an finite dimensionalapproximation of the beam, is essential for its effectiveness.
Key Words— Robust control; Mixed H2/H∞ problems; Infinite-dimensional linear systems.
1 Nomenclatura
Afora a nomenclatura matematica habitual, seraousadas as seguintes definicoes:
infK!!
J [K] denota o ınfimo de J [K] sobre oconjunto Ω.
!f(s)!" " inf!!#
|f(j!)|,H"
+ " funcoes analıticas e limitadas no semi-plano complexo a direita, um espaco de Banachna norma !.!" definida anteriormente.
H2,$1+ " funcoes f(s) analıticas no semi-
plano complexo a direita tais que (1 + s)$1f(s) #H2
+, um espaco de Hilbert estudado em (da Sil-veira e Ades, 2001).
H2+ e a classe de Hardy das funcoes analiticas
no semiplano complexo a direita dotada da normaquadratica sobre o eixo imaginario. Sobre classesde Hardy consultar (Vidyasagar, 1985).
K%(s) = KT ($s), a para-conjugada da ma-triz K(s).
TrK denota o traco da matriz K."(x $ xe) denota a distribuicao de Dirac no
ponto xe.
2 Introducao
Mostra-se, neste artigo, como a maior exigencia derobustez (relativa a estabilidade) pode levar a de-terioracao do desempenho da planta controlada.Para tal, sera analisado o comportamento tran-sitorio de uma viga apoiada sob o efeito de con-troladores dinamicos de vibracao projetados portecnicas H2/H", variando-se o conjunto de per-turbacoes admissıveis.
Sendo a planta de dimensao finita, a questaoda robustez e fundamental: havera sempredinamica desprezada no calculo do controlador.
Portanto este devera estabilizar, ao mesmo tempo,a planta aproximada utilizada em seu calculo e aplanta original, esta ultima devendo estar contidano conjunto de plantas perturbadas admissıveis.Mais ainda, o controlador otimo sendo de di-mensao infinita (salvo em casos triviais), deveraser aproximado por um controlador de dimensaofinita, que seja admissıvel para o conjunto de plan-tas perturbadas.
Na segunda secao serao descritos sucinta-mente a planta a ser controlada e o problemade controle H2/H" associado, seguindo (Cerna,2001), (Cerna, da Silveira e Sampaio, 2002) e (daSilveira, 2001b). Na terceira secao sera descrito oexperimento e seus resultados. A ultima secao co-menta algumas questoes relacionadas a exigenciade robustez e a aproximacao de sistemas linearesde dimensao finita.
3 Descricao da Planta e do Problema deControle
A planta e uma viga de Euler-Bernoulli simples-mente apoiada e amortecida, como modelada em(Meirovitch, 1997) e estudada em (Cerna, 2001).Sera suposta uma perturbacao pontual, sendoo sensor e o atuador (piezoeletricos) na mesmaposicao (”problema colocado”). Para referencia,a equacao do deslocamento transversal w(t, x) edada por:
a#2w
#t2(t, x)+b
#w
#t(t, x)+c
#4w
#x4(t, x) = u(t)"(x$xe) ,
para t # [0,%) e x # (0, L), a, b e c dados doproblema, xe a posicao do atuador, u(t) o sinalde controle. As seguintes condicoes iniciais e decontorno tambem sao exigidas:

w(0, x) = !(x),"w
"t(0, x) = 0 ,
w(t, 0) = w(t, L) = 0 ,
d"2w
"x2(t, 0) = d
"2w
"x2(t, L) = 0 ,
d um parametro dado, !(x) a perturbacao (su-posta apenas na condicao inicial).
Usando-se o metodo de separacao de variaveise resolvendo a equacao das autofuncoes (variavelx), encontramos:
#k(x) = $ sin(k%x) ,
associadas aos autovalores:
&k = 'k2%2 ,
$ e ' constantes de normalizacao, k = 1, 2, ...Desta forma, a solucao da equacao pode ser
escrita como
w(t, x) =!!
k=1
#kqk(t)
onde as variaveis temporais qk(t) obedecem a:
qk(t) + 2(k&k qk(t) + &2kqk(t) = f#k(xe) ,
desde que seja suposto que o amortecimento possaser expresso como uma combinacao linear darigidez e da massa (Meirovitch, 1997), (k e f cons-tantes calculadas a partir dos dados.
A equacao da saıda, no caso o deslocamentovertical no ponto xe, e dada por:
y(t) = w(t, xe) =!!
k=1
#k(xe)qk(t)
Depois de adimensionalizar o problema(Cerna, 2001), e reunindo aos dados, a equacaode estado passa a ser
X(t) = AX(t) + Bu(t)Y (t) = CX(t)
onde, para k = 1, 2, ...
XT (t) = [q1(t) q1(t) q2(t) q2(t) ...],
A = diagonal"#
0 1!&2
k !2(k&k
$%,
BT = [0 #1(xe) 0 #2(xe) ...],
C = [#1(xe) 0 #2(xe) 0 ...].
A funcao de transferencia deste sistema comuma entrada e uma saıda e dada por:
G(s) =!!
k=1
#2k(xe)
s2 + 2(k&ks + &2k
A aproximacao de ordem n e obtidatruncando-se a base de autovetores nos seusprimeiros n termos. A equacao truncada descreveum sistema linear n-dimensional com funcao detransferencia dada por:
Gn(s) =n!
k=1
#2k(xe)
s2 + 2(k&ks + &2k
O sistema original e assintoticamente estavel.O objetivo a ser atingido e melhorar seu tran-sitorio, aumentando a rapidez de resposta e dimi-nuindo a amplitude de oscilacao maxima. Paraisso sera usada a teoria exposta em (Correa eda Silveira, 1995), onde e definido um criterioquadratico sobre o conjunto dos controladores es-tabilizantes e que resolvem o problema de re-gulacao assintotica, permitindo minimizar a am-plitude da oscilacao. Filtros de ponderacao po-dem ser ajustados de forma a considerar a rapi-dez de resposta, e um coeficiente de ponderacaopode ser ajustado para considerar o compromissoentre a especificacao transitoria e a saturacaodo controlador. Esta teoria supoe o conjuntode controladores parametrizado pela conhecidaparametrizacao de Youla, estendida como em (daSilveira e Correa, 1992). Mais diretamente, aposa resolucao de duas equacoes diofantinas sobre oanel das funcoes racionais proprias estaveis (nocaso de dimensao finita) ou sobre o anel H! (nocaso de dimensao infinita), chega-se a um criterioquadratico da forma:
J2[K(s)] =& !
"!Tr K#(s)!(s)K(s)! 2K#(s))(s)s=j! d&
onde K(s) e o parametro de Youla a partir doqual calcula-se o controlador, !(s) = !#(s) e )(s)matrizes calculadas a partir dos dados do prob-lema. Aqui, K(s) e uma matriz cujos coeficientespertencem ao espaco funcional H2,"1
+ . Para sis-temas de dimensao finita, K(s), de fato, e umamatriz racional propria estavel. Cabe lembrar queo conjunto das funcoes racionais proprias estaveise denso em H2,"1
+ (da Silveira e Ades, 2001), nasua topologia, e tambem denso no conjunto dasfuncoes em H!
+ contınuas no eixo imaginario es-tendido, na topologia deste ultimo espaco (Cur-tain e Zwart, 1995: 668).
O problema de minimizacao de J2[K(s)] pos-sui uma solucao unica K(s) " H2,"1
+ , nascondicoes do problema, aplicando os resultados de(da Silveira, 2001b) aos sistemas especıficos aquitratados, tanto no caso do sistema de dimensao in-finita, quanto no caso de suas aproximacoes de or-dem n (quando sera adicionado o ındice n as difer-entes matrizes definindo o criterio). Os criteriose matrizes funcionais sao apresentados explicita-mente em (Cerna, 2001).

A restricao de robustez considera conjuntosde perturbacoes aditivas do sistema aproximadode ordem n (suas perturbacoes admissıveis), diga-mos:
Sn = Gn(s) + !G(s)tal que!!G(s)!! " !"1n
onde espera-se que !n seja tal que Gn(s) e G(s)pertencam a Sn, para todo n. Mostra-se (Curtaine Zwart, 1995) que o conjunto de controladoresestabilizando todos os sistemas em Sn e descritopor:
J!n[K(s)] = !En(s)K(s) + Fn(s)!! " !n
Sendo En(s) e Fn(s) matrizes em H!+ deter-
minadas a partir dos dados. Definamos por "n
o conjunto das matrizes K(s) obedecendo a estaultima restricao. Existe um valor mınimo para !n
tal que "n(!n) nao e vazio, que pode ser calculadoa partir da Teoria (de Controle) H! (ver (Curtaine Zwart, 1995), que considera inclusive o caso dedimensao infinita).
O problema que nos interessa e o problemamixto H2/H! definido por:
encontrar K(s), matriz em H!+ , tal que
J2[K(s)] = infK(s)#!n
J2[K(s)]
Cabe lembrar que H!+ # H2,"1
+ , sendo "n # H!+
um subconjunto convexo, fechado e limitado deH2,"1
+ .Um problema equivalente pode ser definido
para o sistema original, de dimensao infinita.Os dados deste problema serao denotados pe-los mesmos sımbolos ja utilizados, porem sem oındice n. Em (da Silveira e Ades, 2001) mostra-se que estes problemas possuem solucao unica,desde que as restricoes nao sejam vazias e que oscriterios quadraticos tenham certas propriedades,verificadas no caso deste artigo (Cerna, 2001).Por outro lado, nao e difıcil verificar que os sis-temas lineares descritos acima sao exponencial-mente estaveis e que
!G(s)$Gn(s)!! $% 0 se n $%&.
Mais ainda, se !n $% ! por valores inferiores,"n $% " na metrica de Hausdor# associada. Nes-tas condicoes mostra-se em (da Silveira, 2001a)que as solucoes dos problemas aproximados (sis-temas de dimensao n) convergem para a solucaodo problema original (de dimensao infinita), emmetricas apropriadas.
Finalmente, a solucao do problema mixtoH2/H! apresentada acima e de dimensao in-finita, isto e, uma matriz nao-racional, salvo emcasos triviais, e mesmo para sistemas de dimensaoinfinita. Por isso, um metodo de aproximacaodos controladores otimos por controladores de di-mensao finita necessita ser usado. No exemplo
aqui tratado foi usado o metodo de Galerkin de-senvolvido em (Ades, 1999). Como o metodoencontra solucoes aproximadas viaveis, adapta-sea metodologia aqui aplicada. Em (da Silveira,2001a) mostra-se que os controladores aproxima-dos assim calculados convergem para o contro-lador otimo do problema original (de dimensaoinfinita), quando n e o ındice indicando a aproxi-macao do controlador tendem a&, nas topologiasapropriadas. Mostra-se tambem que os ındices deperformance tambem convergem, permanecendoas solucoes aproximadas dentro da regiao ad-missıvel ".
4 Experimento e Resultados
No experimento realisado, usou-se o sistemaaproximado de terceira ordem, n = 3. O sis-tema de dimensao infinita foi simulado pelo sis-tema aproximado de sexta ordem. De fato, daexpressao das funcoes de transferencia, pode-semostrar que:!!!!!
!"
k=n+1
"2k(xe)
s2 + 2#k$ks + $2k
!!!!!!
"!!!!
"2n(xe)
s2 + 2#n$ns + $2n
!!!!!
o que justifica a aproximacao.Primeiro, os filtros e os parametros de
ponderacao constando da definicao do criterioquadratico foram ajustados para a obtencao deum transitorio interessante para o problema semrestricao de robustez. Obteve-se um desempenhosignificativamente melhor que o que temos encon-trado na literatura, para controladores calcula-dos por estrategias modais. Estes controladoresacabam por introduzir maior amortecimento emcada modo, de forma independente, sem conside-rar as relacoes de dependencia entre as equacoes eas majoracoes que permitem as aproximacoes, aocontrario do que ocorre com o metodo aqui uti-lizado.
A seguir, o controlador otimo aproximado foicalculado para diferentes valores de !n, desde!n = 0 (que corresponde ao controlador mais ro-busto) ate um valor grande o suficiente para quea solucao do problema mixto H2/H! estivessecontida em "n, isto e, fosse a solucao otima doproblema sem restricao de robustez. Cabe obser-var que, sendo o sistema original estavel, o contro-lador mais robusto (minimizando J![K(s)]) cor-responde ao parametro K(s) ' 0.
Ao calcular-se os controladores otimos parapequenos !n, por razoes numericas, foi necessarioreduzir o problema a forma de Nehari. Para va-lores maiores deste parametro, ao contrario, estareducao mostrou-se numericamente inconveniente(Cerna, 2001).
Apos os calculos, os controladores aproxima-dos obtidos foram aplicados a planta de sexta or-dem (simulando a planta original, de dimensao in-

0 1 2 3 4 5
!2.5
!2
!1.5
!1
!0.5
0
0.5
1
1.5
2
2.5x 10!3
Tempo [s]
Ampli
tude d
e osci
lacao
[m]
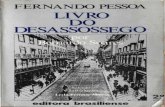
Saída
com controlesem controle
! = 68.051
Figura 1. Saıda controlada usando-se Controle MixtoH2/H!, !3 = 68.051.
finita), considerando uma perturbacao padrao. Osresultados obtidos nas simulacoes aparecem nasfiguras a seguir.
A Figura 1 apresenta a saıda do sistema,y(t) = w(t, xe), quando usado o controladorquadratico otimo calculado a partir de K(s). Defato, J![K(s)] = 68,051, isto e, este controladorpertence a !n(!n), com !3 = 68,051.
Este e o caso onde foi obtido o melhordesempenho transitorio (compare as Figuras 2a 6), embora pequenas perturbacoes da planta(!"G(s)!! " (68, 051)"1 = 0,0146) possam ins-tabilizar o sistema controlado. Este fato e na-tural, pois, neste caso, so o criterio quadratico- expressando o comportamento transitorio de-sejado - afeta o problema. Para comparacao, emostrada com linha pontilhada a saıda do sis-tema para K(s) # 0, que corresponde ao con-trolador maximizando a robustez, isto e, mini-mizando J![K(s)].
As Figuras 2 a 6 apresentam a saıda quandoos controladores usados sao os controladoresotimizando o problema mixto para !3= 54,440,40,381, 4,000, 0,125 e 0,04, respectivamente, sem-pre comparadas a saıda relativa ao controladorque fornece o maximo de robustez.
Como dito acima, o desempenho estacionariodeteriora-se a medida que o valor de !3 diminui,isto e, a medida que se aumenta o conjunto deperturbacoes admissıveis a planta nominal.
Como ultimo resultado, a Figura 7 apresentaa resposta em frequencia do sistema otimamentecontrolado para tres valores de !3 (4,00, 0,125 e0,04), comparadas com a resposta em frequenciado sistema nao controlado.
Os controladores H2/H! alteram a respostaem frequencia nos picos correspondendo aosmodos, atenuando-os, como ocorre no controlemodal. A maior atenuacao ocorre no primeiro
0 1 2 3 4 5
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5x 10!3
Tempo [s]
Ampli
tude d
e osci
lacao
[m]
Saída
com controlesem controle
! = 54.440
Figura 2. Saıda controlada usando-se Controle MixtoH2/H!, !3 = 54.440.
0 1 2 3 4 5
!2.5
!2
!1.5
!1
!0.5
0
0.5
1
1.5
2
2.5x 10!3
Tempo [s]
Ampli
tude d
e osci
lacao
[m]
Saída
com controlesem controle
! = 40.831
Figura 3. Saıda controlada usando-se Controle MixtoH2/H!, !3 = 40.831.
0 2 4 6 8 10!3
!2
!1
0
1
2
x 10!3
Tempo [s]
Ampli
tude d
e osci
lacao
[m]
Saída
com controlesem controle
! = 4.000
Figura 4. Saıda controlada usando-se Controle MixtoH2/H!, !3 = 4.000.

0 2 4 6 8 10
!2.5
!2
!1.5
!1
!0.5
0
0.5
1
1.5
2
2.5x 10−3
Tempo [s]
Ampli
tude d
e osci
lacao
[m]
Saída
com controlesem controle
! = 0.125
Figura 5. Saıda controlada usando-se Controle MixtoH2/H∞, λ3 = 0.125.
0 5 10 15
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5x 10!3
Tempo [s]
Ampli
tude d
e osci
lacao
[m]
Saída
com controlesem controle
! = 0.040
Figura 6. Saıda controlada usando-se Controle MixtoH2/H∞, λ3 = 0.04.
100 101 102!110
!100
!90
!80
!70
!60
!50
!40
!30
!20
!10
Frequência
dB
Resposta em Frequência
= 4.000 = 0.125 = 0.040sem controle
!!!
Figura 7. Resposta em frequencia do sistema controladosegundo λ3.
pico, o mais alto e, por isso, o mais crıtico.Porem, diferentemente do controle modal, hauma alteracao importante nas frequencias baixas,responsavel pelo melhor desempenho transitorio.Isto e, ali aparece a influencia determinante docriterio quadratico. Claro, quanto menor o valorde λ3, mais proxima a resposta daquela do sistemanao-controlado (K(s) ≡ 0), neste caso o contro-lador otimo H!, maximizando a robustez.
5 Comentarios
Os resultados da secao anterior mostram a de-terioracao do comportamento assintotico frente amaiores exigencias de robustez. O resultado e na-tural, pois, assim como mostrado em (Correa, daSilveira e Basılio, 1991), a tentativa de impor es-pecificacoes transitorias a toda uma classe de sis-temas, no lugar de um sistema determinado, de-teriora os resultados obtidos. Porem, no caso emquestao, a classe admissıvel de sistemas perturba-dos e imposta pela necessidade da aproximacao.Reencontra-se o compromisso natural entre a or-dem do sistema aproximante e o comportamentodesejado do sistema nao aproximado, agora quan-tificado pelas normas H!.
Mais que a comparacao acima realizada,mostrou-se um exemplo de uma estrategia de con-trole para sistemas de dimensao infinita, ondeas aproximacoes necessarias sao controladas, u-sando os resultados teoricos de (da Silveira,2001a), a metodologia H2/H! de (da Silveirae Ades, 2001), e sua adaptacao a problemas dedimensao infinita em (Cerna, 2001) e (Cerna,da Silveira, Sampaio, 2001). Nos dois ultimostrabalhos mostra-se a necessidade de variacoesnos algoritmos originais para enfrentar os pro-blemas numericos que aparecem em decorrenciadas diferencas entre ordens de grandezas dosparametros (naturais em sistemas de dimensaoinfinita) e das influencias cruzadas dos criteriosquadratico e H!.
Esta metodologia pode ser extendida a sis-temas exponencialmente estabilizaveis tais que aparte estavel tenha sua funcao de transferenciacontınua no eixo imaginario estendido. A diago-nalizacao em blocos do sistema utilizado neste ar-tigo nao e essencial ao metodo, apenas facilitandodemonstrar as aproximacoes.
Espera-se ampliar o escopo da metodologia deforma a cobrir sistemas nao colocados (posicao demedida diferente da posicao de atuacao).
Referencias Bibliograficas
Ades, R. (1999) Problema H2/H! - Solucoesaproximadas via expansao de bases, Tesede Doutorado, Departamento de EngenhariaEletrica, PUC-Rio, Rio de Janeiro, Brasil.

Cerna, E. V. (2001), Controle Robusto deVibracoes: Aplicacoes de um ControladorH2/H! Dissertacao de Mestrado, Departa-mento de Engenharia Mecanica, PUC-Rio,Rio de Janeiro, Brasil.
Cerna, E. V., da Silveira, M. A., Sampaio, R.(2001), Performance Against Stability Mar-gins Using H2/H! Control, Anais do CN-MAC2001, SBMAC, Rio de Janeiro, Brasil.
Correa, G. O., da Silveira, M. A. and Basılio,J. C. (1991), On the design of servomech-anisms via H2-optimization, Relatoriode Pesquisa e Desenvolvimento do LNCCn. 011/1991, (Rio de Janeiro, BRAZIL:LNCC).
Correa, G. O. e da Silveira, M. A. (1995),On the design of servomechanisms via H2-optimization, International Journal of Con-trol, 61, 475-491.
Curtain, R. F., Zwart, H. J. (1995), An Introduc-tion to Infinite-Dimensional Linear SystemsTheory, Springer-Verlag, Berlin, RFA.
da Silveira, M. A. (2001a), On H2/H! Prob-lem for Irrational Transfer Linear Systems,aceito para publicacao no SOTA2 Proceed-ings.
da Silveira, M. A. (2001b), Robust OptimalTracking and Regulation for Linear Sys-tems: the H2/H! Approach, Proceed-ings CDC2001, IEEE (CDROM), Orlando,Florida.
da Silveira, M. A. , Ades, R. (2001), The Solu-tion of H2/H! Problems by Direct Meth-ods, a ser publicado no SIAM Control andOptimization.
Meirovitch, L. (1997), Principles and Techniquesof Vibrations, Prentice Hall.
Vidyasagar, M., (1985), Control System Synthe-sis, Cambridge, Massachussets: MIT Press.




















