
Design and Technologies
105
Design and Technologies
-
Upload
khangminh22 -
Category
Documents
-
view
4 -
download
0
Transcript of Design and Technologies
Design and
Technologies
ISSN
ISBN
Anno | Year
Direttore | Editorial Director
Comitato Direttivo | Editors Board
Comitato Scientifico | Scientific Board
Comitato Editoriale | Editorial Advisory Board
Redazione Napoli | Editorial Staff
Caporedattore | Editor In-Chief
Progetto grafico | Graphic Layout
Curatore | Guest Editor diid 67
diiddisegno industriale | industrial design
Fondata da | Founded by
N°67/19
Editorial
Introduction
Think
Make
Focus
Maestri
16
24
34
42
52
78
60
94
102
86
110
136
144
152
128
176
190
160
4
10
Journal published every four months
Tonino ParisRegistration at Tribunale di Roma 86/2002 in the 6th of March 2002
1594-8528
9788832080209
XVII
Tonino Paris
Mario Buono, Loredana Di Lucchio, Lorenzo Imbesi, Francesca La Rocca, Giuseppe Losco, Sabrina Lucibello
Andrea Branzi Politecnico di Milano | Milano (Italy)Bruno Siciliano Università degli Studi di Napoli Federico II | Napoli (Italy)Stefano Marzano Founding DEAN, THNK School of Creative Leadership | Amsterdam (Netherlands)Sebastián Garcia Garrido Universidad de Málaga | Malaga (Spain)
Luca Bradini, Sonia Capece, Andrea Lupacchini, Enza Migliore, Federico Oppedisano, Lucia Pietroni, Chiara Scarpitti, Carlo Vannicola, Carlo Vinti
Camelia Chivaran, Veronica De Salvo, Fabrizio Formati, Giovanna Giugliano, Elena Laudante, Ciro Scognamiglio
Sonia Capece
Blacklist Creative
Mario Buono, Francesca La Rocca
Design and TechnologiesDesign, robotics and machines in the post-human age
IIT the Research Center of Excellence > Tonino Paris
Design, robotics and machines in the post human age > Mario Buono,
Francesca La Rocca
From homo mechanicus to superman: a morphological reflection > Luca Bradini
Robotics on the design scene > Sonia Capece
Design téchne e lógos > Lorenzo Imbesi
Robots are with us, within us and among us > Bruno Siciliano
User centered design and digital innovation > Andrea Vian
Think gallery > Daily Automaton > Veronica De Salvo
Humanoid Robotics Design for active ageing > Niccolò Casiddu,
Emanuele Micheli, Claudia Porfirione, Francesco Burlando
Design and AI: prospects for dialogue > Mauro Ceconello,
Martina Sciannamè, Davide Spallazzo
RoboEthics: form follows service > Claudio Germak, Lorenza Abbate
Of robots, wood, ropes and martian sand > Gianmarco Paduano, Sara Nappa
Make gallery > Collaboration between Human, Machine, Environment > Elena Laudante
Phygital experiences design > Gianluca Carella, Venanzio Arquilla,
Francesco Zurlo, Maria Cristina Tamburello
Pre-cyborg, time for the technological foot > Flaviano Celaschi, Giorgio Dall’Osso
Human-Machine Co-Living > Fabrizio Valpreda, Marco Cataffo
Design, emotions and wearable devices > Matteo Zallio
Focus gallery > Unconventional Machines > Giovanna Giugliano
The Bauhaus narrated by its protagonists > Tonino Paris
Maestri gallery >
Index
5Editorial
Editorial
Tonino Paris > [email protected]
Giorgio Metta works in the Italian Institute of Technology (IIT): a 49-year-old engi-neer, known to the general public as the “father” of the humanoid iCub robot, he will begin his four-year term as Director of the Institute in 2020.
IIT has almost become a home, given the time we spend there, but it is also the dream and the possibility of doing research in Italy and doing it at a high level to compete on an international scale. This is demonstrated by the numbers: the overall IIT staff currently has 1700 people from over 60 countries, the average age is 35, 42% are women and 49% of the researchers come from abroad (of which 14% are Italians repatriated). In addition to the Genoa headquarters, there are also 11 research centers distributed throughout the country, as well as 2 abroad (at Harvard Medical School and MIT in the United States). [...] The IIT was born in September 2003 with the aim of building a new link between two worlds. This bridge could link research and applications, which together make technological miracles and which, unfortunately, in our country are often at a great distance from each other. [...] Our country conducts excellent research in many fields of science and technology, but it struggles to build the applications that could derive from this science and technique. [...] These applications then result in competitiveness, growth, employment, health, well-being and sustainability. [...] We have some points of excellence in some areas and these could be exploited according to what is called Smart Specialization. [...]By choosing where to invest, by making a critical mass, we can do research of the highest quality, attracting talents from all over the world and, at the same time, trans-ferring it to society, meeting real needs. The interesting thing in my opinion is that in a world of technological acceleration, opportunities multiply, and they are close over time. The last one in terms of time is certainly artificial intelligence or AI. Not a day goes by without reading about some new progress: cars without drivers, programs that beat the man at chess, at Chinese checkers, who read x-rays or [...] tell us how to find our favorite restaurant. The AI is the new electricity, it can be transformed into the most different things. Combined with robotics, it can lead us to progress towards sustainability. The AI means health, through advanced diagnosis, decision support, rehabilitation robotics and surgery. The AI means energy savings through resource planning, smart grids to make the best use of renewable sources, but also precision agriculture, land monitoring. The AI means making the machine do not so much what the individual already does, but what he cannot or should not do because it is dangerous. The AI means helping people in the face of a growing [...] aging popula-
IIT the Research Center of Excellence
Emeritus Professor, Sapienza University of Rome
76 EditorialDesign and Technologies
tion. Finally, the AI is the ability to predict the result of our actions through advanced computational models that can actually help us make complex decisions in the field of energy, transportation, engineering, health policies and economic policies. [...] The AI is only a branch of computer science that develops data analysis algorithms (the so-called “big data”) and uses them to understand what could happen in the future. There is no intelligence in the human sense of the term and, truly speaking, everything works only when we restrict the application context very much. I leave you with a final consideration: we have imported the model of international research through the IIT. This model connects research with the applications and, in a final analysis, the inven-tion with the company. (Metta, 2019)
Then we make a through study of the a deepen the IIT Strategic Plan for the next years.
Technology TransferTechnology Transfer will be central to IIT’s strategy, with a twofold target: · translating technologies to industry and to the production system by continuing to
develop joint research programs with industry and by exploiting IIT’s large patent portfolio to create new start-ups and Joint Laboratories with national and interna-tional companies in all research areas of the Strategic Plan;
· translating technologies to healthcare by co-designing and transferring IIT tech-nology platforms (such as robots, sensors, materials) to healthcare, surgery, diagnostics, and therapy via joint research programs and Joint Laboratories with research hospitals and clinical research institutes (IRCCS).
The four pillars of the Technology Transfer strategy of IIT will be: Sponsored Research Agreements with Industries; IP protection and licensing; Joint Laboratories with industries and Research Institutions; and Start-up companies. [...]
Strategic ProgramsSince its foundation, IIT’s driving force has been to develop new knowledge and translate it into concrete applications by adopting a fully interdisciplinary approach. With its first strategic plan, the Humanoid Technology Program (2009-2011), IIT introduced the concept of bioinspired intelligent machines to support humans in everyday life. This concept brought together disciplines such as neuroscience, nano-technology, and mechatronics, which, until then, had barely communicated with each other. The 2012-2014 plan expanded this interdisciplinary vision by intro-ducing the concept of Translating Evolution into Technology, [...] to develop new technologies in the fields of robotics, materials science, and life science. This created the knowledge basis for the most recent strategic plan of 2015-2017 [...] centered on the Human Being. [...]A detailed implementation plan for the period 2021-2023 will be developed after confirmation of the structure and funding priorities of the forthcoming 19th
Framework Program. [...]
IIT’s research vision reflects the overarching priority of developing Human-Cen-tered Science and Technologies by adopting an approach that is not merely multidisciplinary, but rather seeks to merge different skills and expertise into a truly interdisciplinary synthesis. [...] In agreement with this vision and the Institute’s scientific identity, the Strategic Plan identifies four strategic Research Domains (RDs) to be developed over the period 2018-2023: Robotics, Nanomaterials, Technol-ogies for Life Science (LifeTech), and Computational Sciences. [...]
RoboticsTo date, the Robotics teams consists of 224 scientists and PhD students and 82 technicians. Among the scientists are 15 PIs and 5 ERC winners. The Robotics RD has 17 ongoing European projects, 3 recently approved European projects, and 138 patents. Robotics will continue along the successful pathway developed in the past ten years. The Robotics RD has identified five Priorities: Mechatronics, Social Cogni-tion and Human Robot Interaction, and Intelligent Companion Robots [...], for which IIT has already achieved international leadership with its humanoid robots, socially attuned robots and robotic rehabilitation platforms. [...]Important technological outcomes of these priorities will include the next-gener-ation iCub 3.0, the updated version of the low-cost plastic robot R1, and the new HalfMan robot for applications in the fields of service robotics, human assistance and disaster recovery, respectively.The Soft Robotics Priority originates from pioneering work on the Plantoid robot and bioinspired technologies. [...] Biomedical Robotics will be the most technolo-gy-oriented Priority, developing new technologies for surgery, rehabilitation and prosthesis in collaboration with a large research network of research hospitals. [...]
NanomaterialsTo date, the Nanomaterials teams include 22 PIs, 427 scientists and PhD students, and 35 technicians. Among the PIs, the Nanomaterials RD includes 9 ERC winners and the only Italian Coordinator of a Marie Skłodowska-Curie Network. The Nano-materials teams run 20 European projects, with 6 more recently approved. They have produced more than 212 patents. [...] The Nanomaterials RD has identified four Priorities. The Nanomaterials for Sustainability and Nanomaterials for Energy Priorities build upon this RD’s internationally recognized activities in the field of nanocomposites, bio-degradable materials, and graphene. Some of these activi-ties [...] will be developed further within the framework of the European Flagship Graphene. These Priorities consist of a balanced fundamental and applied research activity that will contribute to both core missions. The Nanomaterials for Health Priority, strengthened by three new ERC grants, aims to develop drug carriers and high-sensitivity sensors for therapy and diagnostics. These activities will expand in collaboration with a network of research hospitals and clinical research institutes (IRCCS), which is being established under the umbrella of the Ministry of Health.
98 EditorialDesign and Technologies
[...] Finally, the Exploratory Materials Sciences Priority brings together a number of teams carrying out research in colloidal chemistry, where IIT is a world leader, together with polymer synthesis and 2D materials. This research has a strong impact on many of IIT’s other key areas, such as energy, optoelectronics, and biomedical applications. [...] Technologies for Life Science (LifeTech)Contributions to this RD come from over 319 scientists and PhD students and 46 technicians. Among the scientists are 21 PIs with 2 ERC winners. The LifeTech RD production includes 6 European projects with three more recently approved, and 166 patents. Research in life sciences at IIT has evolved over the past three years. [...]The focus is increasingly on genomics and on new technologies for healthcare. The LifeTech RD has identified 3 Priorities. The Neuroscience and Brain Tech-nology Priority will carry out most of the fundamental research into neuroscience and cognition. It will develop new tools for brain recordings at multiscale levels. The RNA Technology Priority will implement new platforms for RNA-based drugs for personalized medicine, building on discoveries in the non-coding portion of the genome. Finally, the Technologies for Healthcare Priority will develop inno-vative technology platforms for healthcare, including sensors for detecting single biomolecule events, non-invasive devices for recording brain activity, nanoparticles for diagnosis and drug release, robots for surgery and rehabilitation, companion robots for elderly people, technologies for visually impaired people, and software and high-performance computing methods for genomics and neuroscience. The co-development of these technologies will benefit from the interdisciplinary collab-oration of researchers across the RDs, with about 50 scientists from the Robotics, Nanomaterials, and Computational Sciences RDs contributing to this Priority. [...]
Computational SciencesThe Computational Sciences RD traces its origins back to Compunet, the theoret-ical network launched as part of the 2015-2017 strategic plan. Despite its young age, computational activities have grown remarkably in the last three years, with around 120 scientists and PhD students, 4 technicians, and 63 patents. The scien-tists include 12 PIs and 2 ERC winners. This RD has identified 4 Priorities. The Development HPC Algorithms & Software Priority will be dedicated to building computational infrastructure and internal skills in software development, with a clear focus on technology transfer and applications. The Computational Modeling Priority will encompass most of the curiosity-driven research, where advanced theoretical methods will be applied transversally to problems generated by other RDs, including materials design, molecular dynamics, and quantum chemistry. The other Priorities (Machine Learning, Deep Learning & AI, and Computer Vision) will develop their own fundamental research, while also supporting the activity of the Robotics, Nanomaterials, and LifeTech RDs. [...]
IIT Leadership TargetsThe overarching goal is to make IIT an outstanding international scientific and technological brand, whose credibility and prestige cross the borders of the research community to be recognized by the general public. Below, leadership targets are expressed as a series of commitments. · Consolidate IIT’s scientific leadership in the Research Domains of the strategic plan
In terms of scientific excellence in the four RDs, IIT should close the gap with its strongest competitors, the world’s leading research institutes (e.g. MIT, Stan-ford, Weizmann, Oxford). State-of-the-art scientific infrastructures, transparent international peer-reviewed evaluations, and a high-quality international envi-ronment have positioned IIT as a place of opportunity for interdisciplinary research. It will be increasingly important for IIT to build on these assets to attract the best researchers worldwide. [...]
· Transform research into usable technologies, ultimately creating new jobs and contributing to the gross national productAnother leadership target is to create a system to accelerate the transformation of new knowledge into new technologies. This requires a strong effort to create a network of companies, end-users, and investors centered around IIT. In addition to standard collaborations with companies via sponsored research agreements, IIT plans to develop new Joint Laboratories with companies and clinical insti-tutions (to co-design new technologies for healthcare). Technology transfer activities will be guided by the goal of growing and constantly monitoring the patent portfolio, a fundamental asset. IIT aims to increase the patent portfolio and the licensing activities so that extramural funds are at least five time greater than the cost of the patent portfolio, with the income from licenses being equal to around 1% of the intramural budget. Another important indicator will be the number of new jobs created by the start-ups launched by IIT researchers. [...]
· The estimated value of the IIT Patent PortfolioDespite the value of Patent Portfolio provides an important KPI, the use of objec-tive indicators to determine the value of IP assets is still limited. Patsnap [...] uses [...] a set of 25 objective value indicators (e.g. forward- and backward- citations, patent family sizes, geographical coverage, patent age, legal status etc.) and adjusts the calculated patent value based on empirical data of historical patent transactions.
References
> IIT Strategic Plan 2018-2023 (Italiano).> Freely translated from Giorgio Metta, L’intelligenza
artificiale è la nuova elettricità. In “Il Sole 24 ore”, June 2019.

1110
Introduction
Mario Buono, Francesca La Rocca
> [email protected] [email protected]
Design, robotics and machines in the post-human age
Full Professor, University of Campania “Luigi Vanvitelli”Associate Professor, University of Campania “Luigi Vanvitelli”
Mechanization Takes Command: from the famous title by Siegfried Giedion, it is possible to notice that there is a “machinic” universe which, during the entire modern period, is compared to the individual in a strict and dialectic way, and which is historically connected to the culture of industrial design. It is equally true that design operates in an autonomous field within which it elaborates the overall picture connected to the technologies, in direct collaboration with the interested disciplines.Starting from these premises, the current DIID issue wanted to investigate according to which directions and logics has the design culture been confronted in recent years with the world of technical artifacts, deeply changed in relation to the evolution of areas such as digital electronics, robotics and AI.Post-human thinking has had a strong influence in stimulating research towards a conjugation between human and machine, where the contamination between the two dimensions is no longer seen as a threat but as a chance for co-existence and transformation. According to André Leroi-Gourhan, the scythe extends its hand like a sort of cultural nail, the printing extends the view, the radio the ear, the idea is that of a constantly open “human building-site”, which transforms and grows hybridizing with technology.Reflections on the contemporary relationships between Design and Technologies have been solicited, questioning the role of the designer as “creator” of tech-nical objects and as “configurator” of innovative machinery for production; he is engaged in a human-machine dialogue as intuitive and fluid as possible, according to cooperation logics and reciprocal extension of the capacities and learning. In this context, the machine is related to design according to a couple of meanings: machine as “technical object” resulting from the designer’s creativity, as well as a tool to produce artifacts through physical and digital processes.With the confluence of mechanics and AI, nowadays the world of robotics comes to be particularly attractive to design. Robotics faces new limits through the develop-ment of complex devices capable of a wide range of tactile, visual, sound, olfactory sensibilities, endowed with cognitive and decision-making skills. The sensory-motor processes allow a fluid communication, so that the robot’s behaviour is always more intuitive and comprehensible.A deeply collaborative dimension between human and machine is perhaps the most “natural” promise for technological innovation that will certainly have an impact on
1312
01
01
Design and Technologies
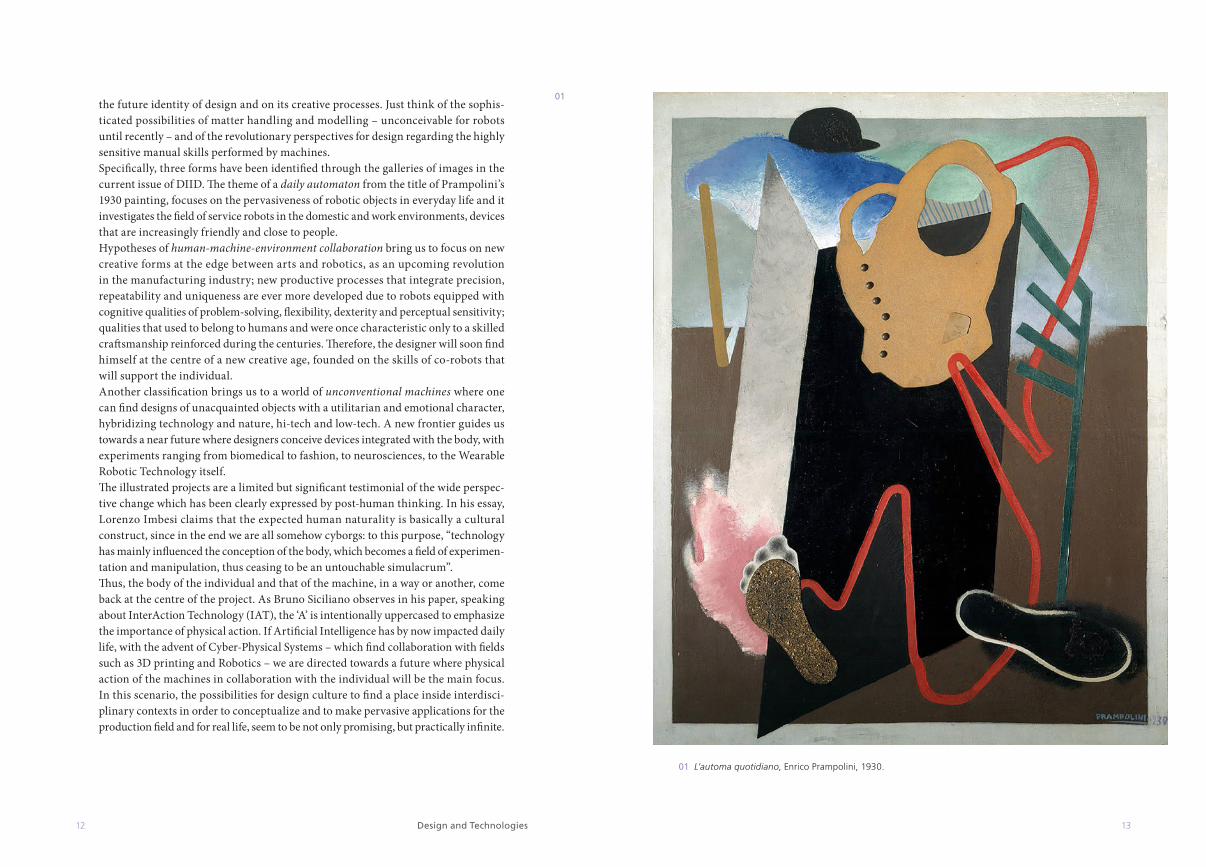
the future identity of design and on its creative processes. Just think of the sophis-ticated possibilities of matter handling and modelling – unconceivable for robots until recently – and of the revolutionary perspectives for design regarding the highly sensitive manual skills performed by machines.Specifically, three forms have been identified through the galleries of images in the current issue of DIID. The theme of a daily automaton from the title of Prampolini’s 1930 painting, focuses on the pervasiveness of robotic objects in everyday life and it investigates the field of service robots in the domestic and work environments, devices that are increasingly friendly and close to people.Hypotheses of human-machine-environment collaboration bring us to focus on new creative forms at the edge between arts and robotics, as an upcoming revolution in the manufacturing industry; new productive processes that integrate precision, repeatability and uniqueness are ever more developed due to robots equipped with cognitive qualities of problem-solving, flexibility, dexterity and perceptual sensitivity; qualities that used to belong to humans and were once characteristic only to a skilled craftsmanship reinforced during the centuries. Therefore, the designer will soon find himself at the centre of a new creative age, founded on the skills of co-robots that will support the individual.Another classification brings us to a world of unconventional machines where one can find designs of unacquainted objects with a utilitarian and emotional character, hybridizing technology and nature, hi-tech and low-tech. A new frontier guides us towards a near future where designers conceive devices integrated with the body, with experiments ranging from biomedical to fashion, to neurosciences, to the Wearable Robotic Technology itself.The illustrated projects are a limited but significant testimonial of the wide perspec-tive change which has been clearly expressed by post-human thinking. In his essay, Lorenzo Imbesi claims that the expected human naturality is basically a cultural construct, since in the end we are all somehow cyborgs: to this purpose, “technology has mainly influenced the conception of the body, which becomes a field of experimen-tation and manipulation, thus ceasing to be an untouchable simulacrum”.Thus, the body of the individual and that of the machine, in a way or another, come back at the centre of the project. As Bruno Siciliano observes in his paper, speaking about InterAction Technology (IAT), the ‘A’ is intentionally uppercased to emphasize the importance of physical action. If Artificial Intelligence has by now impacted daily life, with the advent of Cyber-Physical Systems – which find collaboration with fields such as 3D printing and Robotics – we are directed towards a future where physical action of the machines in collaboration with the individual will be the main focus. In this scenario, the possibilities for design culture to find a place inside interdisci-plinary contexts in order to conceptualize and to make pervasive applications for the production field and for real life, seem to be not only promising, but practically infinite.
L’automa quotidiano, Enrico Prampolini, 1930.
Think gallery > p.60/p.75
Think
Luca Bradini
Sonia Capece
Lorenzo Imbesi
Bruno Siciliano
Andrea Vian
From homo mechanicus to superman: a morphological reflection
Robotics on the design scene
Design téchne and lógos
Robots are with us, within us and among us
User centered design and digital innovation
17Thinkdiid n.67/2019
Think
Luca Bradini
If you’re similar me, I’ll speak, play, and work with you. But if you’re equal to me, I’ll notice every small difference between your and my equality, and I’ll be afraid of any difference of yours.In 1970, in the journal Energy[2], robotics engineer Masahiro Mori published a research work proposing a theory named the “uncanny valley”, in which he main-tained that the excessive similarities of a robot’s features to those of a real person highlighted every small f law that might be associated with the non-similarity. The emotional reaction of the potential human being who might be interacting with this automaton would thus undergo an emotional “collapse” at a certain point, provoking in him or her a profound sense of unease, revulsion, and fear, due precisely to this “non-complete” equality. The theory was set out during a period when science began to travel down the road of robotics supported by computer science, proposing, as in the past, its formal, anthropomorphic vision, albeit in the continuous search for a technology that might augment the level of these products’ independence and autonomy.A human being’s encounter with a being similar to him or her, but the result of “mechanical” ingenuity, is a relationship ancestral in character. In this relation-ship, the morphological nature imitative of humans has the aim of recognizing the need for an aid that can be “subjugated” or made use of, with no fear in terms of morality or of emotional involvement. This “similar” being is considered as lacking a subconscious and subjectivity, and thus as “mentally insufficient”,[3] and then the real, human party, not without emotional subjectivity towards this insufficient machine, is deemed to become resonant, undergoing an unconscious refusal due to the perceived although unrationalized emotional deficiency.With this interpretation key, the path of these creations show that the future dynamics, increasingly directed towards hybridization between humans and artifice, require a reconnaissance done with a precise thematic filter – that of analyzing the anthropomorphic “design” of the artifice.
The beginningClassic historiography on the evolution of the first automata tends to trace these concepts to Classical Greece, where the automaton considered the oldest known (third century BC), and that has come down to our own days, was made: Philon’s[4] [automatic servant], designed by an inventor from Byzantium.The automaton’s shape probably alluded to a work of statuary (if the recon-struction that was done is reliable), and its function was to pour wine or water alternatively, depending on the hand where the cup rested. Of the prominent figures in Ancient Greece dealing with the world of automata we may cite Hérōn ho Alexandréus, (Hero of Alexandria, 285-222 BC), a scientist, mathematician, inventor, and expert in mechanics, who also built the precursor of the steam-powered device called the aeolipile.
”Did I request thee, Maker, from my clay / To mould me man? Did I solicit thee / From darkness to promote me?”
(J. Milton, Paradise Lost)
The myth of Prometheus [1] and therefore of the artificial construction of humankind through actions of design, fantasy, or technical sophistication, represents the emotional sense of this essay. Uncanniness on the one hand, and seduction on the other, are the feelings that have always been manifested when dealing with “unnatural” human forms: robots, humanoids, automatons, androids, avatars – more or less similar, but in contemporary reality affirming themselves with very significant formal models, and models for relating with people.This essay intends to propose a reconstruction of a phenomenon, which is that of the anthropomorphic product by definition – the robot (in one of its multiple semantic modes to which to make reference) – by reflecting on the relationship between the artificial and natural form of the human body. The investigation in the first instance aims to be descriptive of a historical path implemented with the filter of observation, also of a morphological nature, of the various products and of the value of “autonomous” function, a truly important characteristic. The subsequent part of the essay is an analysis of the evolutionary dynamics in progress, with the aim of highlighting the change in the concept of “anthropomorphism” towards a broader definition including an approach more oriented towards the role of autonomy also in terms of “self-sufficiency” and of fusion between human form and machine.The essay offers a summary that underscores a significant morphological change in the human/machine relationship, taking account of the fact that humans have thus far made only a marginal and in many cases negative contribution to designing nature; in designing the artificial, due to the complexity of the scenario and the dizzying development of technology, the transformation is such as to consider a future of successive and increasingly evident human/machine hybrids possible.
From homo mechanicus to superman: a morphological reflection
Associate Professor, University of Camerino
[ robot, super-human, uncanny valley, automaton, anthropomorphous ]
1918 ThinkDesign and Technologies
Among his various writings in a number of fields, he left a significant record in automatic mechanics with his Automata[5], identifying what we would now call the scientific landscape of automata.The ancient Western world was not alone in its contribution to the mechanics of automata. The East dominated by the various Chinese dynasties also shows traces (scantly supported, actually) dating to a millennium before the Common Era, in which certain accounts[6] in a text from the fourth century BC (Liezi) describe an extraordinary automaton able to move and sing in the presence of King Mu (5th king of the Zhou dynasty, 1045-256 BC). Built by an inventor/engineer named Yan Shi, the automaton, according to the description in the text, had sophisticated mechanisms perfectly consistent with the human body, like the heart, liver, and other vital parts.Although not scientifically reliable, the account is considered a significant trace of these products in ancient history, and of the consequent attention given to them by Eastern culture. In the twentieth century, this was to assert itself and become predom-inant, in parallel with technological evolution. Centuries after Yan Shi, in the Middle East of the thirteenth century, the engineer Ismail al-Jazari (1136–1206), defined as the “father” of robotics and originally from Mesopotamia, designed and described, in a manuscript, dozens of ingenious machines full of mechanical automatisms. The designs led to the possibility of structuring a “programming” of movements with complicated, manoeuvrable devices, like the design for a small band that could play different sounds depending on the movement of small pistons.The various designs by this Islamic “genius” depict a Middle Eastern culture of representation, in which sign and colour are elements essential for describing the object of the invention.Analyzing his production, we may, in 1207, glimpse countless design parallels with the later “Leonardesque” machines, particularly in terms of the attention given to describing the particular component. Of importance is his drawing depicting the internal workings of an automaton for pouring liquids, which may be clearly defined in a parallel with the more well known (to us Westerners) Leonardo’s Robot from nearly 300 years later, called the “mechanical knight” and reported in the Codex Atlanticus.In the case of the mechanical knight, the drawing’s attention is devoted exclusively to the internal mechanism, taken apart and subdivided in different folios, emphasizing the culture of the “detail” over the overall image. It was only in 1950 that Carlo Pedretti “discovered” the whole and built an operational prototype, including the armour.The result is a soldier with armour, that can stand and move its limbs and head.But even centuries later, certainly as regards the former, we can glimpse the first morphological elements that later built the “sense” of the anthropomorphic autom-aton, which is to say the theme of single-axis asymmetry, the relationship between high and low, and therefore the role of the mechanical extremities (arms like human arms) and legs, of the interior as a “human machine”, and of the exterior as “human form”.While not intending to provide a perfect chronological reconstruction, this essay aims
to highlight the most significant passages, linking them above all to certain inspiring principles that promoted this study.The passage is made in the twentieth century, but the sixteenth through the nine-teenth centuries saw an evolution in automata, in terms of the spread of and interest in these products able to greet, play music, smoke, open and close doors, sing, and do arithmetic.In 1744, Jacques de Vaucanson, a famed inventor of that time, exhibited, at Palais Royale in Paris, a metallic Duck “apparently” able to eat, digest, and defecate; in addition to the interior system, the automaton could move its wings, and thus perform certain movement similar to those of the actual animal. The same inventor also built a robot flute player capable of moving its fingers and blowing into the flute, producing sound.From 1800 to the turn of the twentieth century, France and Paris became the centre for the crafting of these items, which were what we might call today the sexy, hi-tech product.During this period, the various “automata” were highly detailed, often highlighting the complexity of the mechanism as formally reported, such as skeleton clocks. The product was enriched with highly refined artisanal handiworks, some of which minia-turized and treated like jewels, while others could in form be associated with the shape of dolls[7]. They became cult objects for the upper bourgeoisie that acquired them in richly illustrated catalogues, and were “flaunted” at various social events, as home technology devices are today.
The twentieth centuryThe last century, starting above all in its second half, substantially changed the role of the “artificial man”. Since the late nineteenth century, the cultural attitude often showed itself to be frightened or hostile whenever “artificial” equals turned up in various novels and later films, but in actuality the substitutional role of the “robot” was affirming itself. Throughout the twentieth century, it was represented by a popular assertion of the culture of the automaton, but in fact, during this period, popular imagination was far from the technological evolution of these products. In the film Metropolis, Fritz Lang’s dystopian vision from 1927, the role of the designed Robot – affirmed as an element to replace “fatigue and therefore the human oppres-sion of working” –, although conserving all the social values the film contains, was no less significant. The world of science worked in parallel with this cultural evolution, adopting several morphological registers; consider the hyperrealistic robots (also specifically called humanoids) by the Japanese scientist already cited at the start of the essay,[8] countering the nascent robotized industry of the 1970s and 1980s.The dominant traits of last century’s evolution in formal terms find an articulate combination as regards the human form – the android, for example, in its initial configuration, to be an aid, must wholly resemble the human body. The relationships
2120 ThinkDesign and Technologies
between the parts, symmetrical arms, head and eyes, legs (two of them) and a propor-tioned body, are substantial.This arrangement came into being due to various factors. The first is that in order to be an aid to people, and considering that the space for action is manmade in nature, the imitative solution is consequently the one most easily adaptable to space. The second factor is that the (now well-known) culture of biomimesis finds perhaps one of its most significant examples in the imitation of the human body.The third factor is certainly more psychological and linked to the need for an interac-tion among like beings, for real exchange and assistance.The “humanoid” robot, then, also develops in relation to its capacity to relate with people. Human features are necessary for building a friendly relationship, even if its intrinsic characteristics, with the development of technology, might not also use anthropomorphic configurations in order to operate.In parallel, in the late twentieth century, information sciences began developing virtual “living” beings to support humans, also because they brought human necessities with them, albeit in a highly virtual and “alien” form – consider the famous game Tamagotchi.[9] Another line of evolution, again starting from the mid twentieth century, proposes a greater formal characterization of the Robot as an aid to human beings, capable of a possible autonomy yet seen as an anthropomorphically divided mechanical system – an evolution that conceptually produces a “formal dismembering” of the mechanical man on the one hand, and a dematerialization of intangible but human characteristics, like intelligence, on the other.Technology transforms the robot from an imitative aid – nearly “useless” because it never sufficiently substituted people – into a “superhuman” product with non-human capacities for response, analysis and calculation.This condition apparently constitutes a loss of the anthropomorphic value of the “android” product, but in actuality disproportionately enlarges the value of the human form, no longer just as a tangible characteristic but above all as an intangible one.The “electronic brain” perhaps marks the first time that this term (now in disuse) indicates a condition in progress, which is to say the possibility of exploiting – in a manner raised to the nth power – the logical, mnemonic and processing capacities of a part of the human body: the brain.The brain and (mechanical) arms are parts that are conceptually anthropomorphic, but in their form are light years away from resembling a body. The whole indus-trial revolution produces a profound transformation, and the “human” worker is replaced in the necessary parts – head and arms – by electronic brains moving mechanical arms.This phenomenon is, in evolutionary terms, in the twentieth century, the one most significant in the analysis of the morphogenesis of the robot.We might then state that morphologically – even though an evolved and expanding technological science using and producing robots that are still anthropomorphic has
remained – the world of humanoids, and of robots, underwent a sea change in the second half of the twentieth century. To this day, this sea change represents, in summary, three passages: The humanoid, android robot, wholly conserving the morphological relationships with the human body.The barely humanoid robot, developing only the morphological characteristics neces-sary for carrying out highly enhanced human activities.The robot is no longer a part autonomous of the human body but becomes a part supplementing and replacing it – what we might see as a phenomenon of absolute hybridization between body and machine, and as evolution in progress.
The contemporary ageIn the contemporary age, the proposed morphological subdivision of the anthropo-morphic product is not hierarchically represented. Technological evolution evolves in parallel in all the scenarios summarized above, and we may therefore trace the elements of this transformation horizontally.The android, which is to say the entity that has a characterizing anthropomorphic nature for formal relationships, is systematically evolving towards a role totally replacing the human being. Emblematic was the inclusion (August 2019) on the Inter-national Space Station (ISS) of the humanoid “FEDOR”,[10] 180 cm tall and weighing 160 kg. Morphologically representing a typical “humanoid” robot in terms of rela-tionships between the parts, this hi-tech product was endowed with new-generation IT devices capable of “learning” human abilities and movements in a state of micro-gravity, thus highlighting the evolutionary dynamics typical of AI. It will learn and then carry out particularly hazardous routine functions, like Extra-vehicular activity (EVA). The objective of the experiment (carried out by Russian scientists) is that of proposing robots to replace humans in activities with greatest exposure to cosmic rays, with a view to a possible long trip towards Mars.The parallel with the impressive armies of humanoids in the Star Wars saga (to cite one as an example) lies at the limit of the uncanny. This is especially so in morphology, which, considering the potential capacities for evolution and autonomy determined by the sciences studying artificial intelligence, constitutes a “leap into the void” wholly to be assessed. This context of the world of humanoids and androids – especially considering the development of artificial intelligence, and with it the greater weight taken on by it in this inescapable ability to give these machines an emotional capacity as well – also includes multiple studies and examples proposing products we may summarize as “social robots”, developing sophisticated technologies capable of relating with people. These also show feelings and expressions, in addition to making movements and engaging in dialogue, as in the case of Face[11] – an android with female features that communicates with facial expressions, thus simulating an emotional level of relation-ship for the hearing impaired.
2322 ThinkDesign and Technologies
We may thus include in this category the entire development of products that are most imitative of humans, and that in some cases disproportionately expand human potentials in terms of strength, resistance, and intelligence, thereby becoming substi-tutes for people themselves, and even interlocutors if anything on an equal footing.In another context, the world of robotics is marked by a substantial loss of the morpho-logical features of the human body, maintaining only some conceptual/relationship ones, such as remote manoeuvrability, and is represented mainly by industrial and service robotics.While in industrial robotics, already present in the last century and now the source of the abused term “Industry 4.0”, evolution appears well guided on easily identi-fiable tracks (those of replacing man in increasingly sophisticated production and control activities, and therefore for the production of manufactured articles), service robotics, understood as an amplified and transferable prosthesis of human capacities, is certainly the contemporary scenario of greatest interest. In this case, the entire world that makes it possible to network information, and in particular the world of IoT, is providing a significant, propulsive thrust. Morphogenesis places the robot between being a remote prosthesis and being an anthropomorphic tool, a transferred piece of the human body – robots guided remotely to carry out activities in which, however, supervision and inputs to action are always controlled directly by humans. Tools for contact, for interaction, are highly sophisticated interfaces, capable of transmitting, on a millimetric scale and with times accurate to the hundredth of a second, the actions of people themselves. The transfer of sensitivity, especially for “robot surgeons”, is one of the main elements of study and development.The ergonomic relationship between actuator and machine is intimate, because it is activated by the ability the machine has to transfer to the operator a set of information that is often triggered by the human body’s sense receptors, like noise and scent, and not sight alone. The evolution of the generation of the “Vinci” robot, now a leader in terms of spread and technology, is just starting out, although it has operated on more than 90,000 patients so far.The real experimentation lies in the ability to learn with artificial intelligence devices so as to constitute an active support at any moment of the operation.The last scenario of the contemporary age – which we might summarize as the comple-tion of a relationship between humans and machines such as to bring about in the true hybridization between artifice and nature that has taken place – is the one typical of the sciences of bionics, in which two substantial morphological passages may be recog-nized: the world of exoskeletons and that of replacing human parts with “hi-tech” parts.Both scenarios represent a substantial fusion between humans and artifice, with an integration of parts(complete or partial) that are auxiliary, but that still integrate the human body: different, detachable, and also with an autonomy of function. Likewise in “invasive” bionics, overlooking all the reflections of a technological nature but stressing the formal character, the relationship between the human part and the
technological one becomes “intimate”, indivisible, belonging to the self, even if still replacing lost normality and abilities.But with a view to the future, in proximity to the previous morphological scenarios in which robots and androids replace humans by expanding their capacities dispropor-tionately, bionics, although directly linked to the exploitation of natural principles, if not necessary for remedying deficits, will be able to become prostheses expanding already normal human capacities.Just as augmented reality makes clear the hybrid condition between reality and its technological amplification, in bionics the hybrid relationship between “anthropo-morphic” normality and technological artifice constitutes the true “super-human” horizon. The theory of the “uncanny valley” will therefore be amplified not to respond to a non-human “flaw”, but for a new, amplified “abnormality”, in which the role of artificial intelligence, or of physical capacities, will not be substitutive, but an intimate expansion of the person’s individual intelligence and physical ability.
References
> Eróne di Alessandria (2012). Degli automati overo machine semoventi. Libri due tradotti dal greco da Bernardino Baldi. Introduzione di Oreste Trabucco. Urbino: Accademia Raffaello Urbino. > Hill, D.R. (1973). The Book of Knowledge of Ingen-ious Mechanical Devices. Berlino: Springer. > Longo, O.G. (2010). L’altra metà del robot: il corpo. Retrieved from http://www.scienzainrete.it
> Rosheim, E.M. (1994). Robot Evolution: The De-velopment of Anthrobotics. New York, (USA): John Wiley&SonsInc. > Sini, C. (2009). L’uomo, la macchina, l’automa. Torino: Bollati Boringhieri.> Taddei, M. (2006). I Robot di Leonardo da Vinci, La meccanica e nuovi automi nei codici svelati. Milano: Leonardo3.
[1] Understood in Ovid’s vision, which is to say as the creator of men from clay.[2] Mori, M. (1970). Bukimi no tani - The Uncanny Valley (K.F. MacDorman& T. Minato, Trans.). Energy, 7(4), 33–35. (Original in Japanese, English translation).[3] Ludovichi, M.L. (2008) “L’automa con quella faccia da straniero” in “Stranieri in famiglia” Percorsi di Psicanalisi VII/2008. Pisa: ed. ETS.[4] At the Kotsanas Museum of Ancient Greek Technology in Athens.[5] Automata came down to our time in the version (De gli automati) translated from the Greek by the abbot Bernardino Baldi in 1589.[6] Reported in “The Shorter Science and Civilisation in China” by Joseph Needham and Colin A. Ronan[7] See Jaquet-Droz’s automata.[8] Masahiro Mori’s robots.[9] Electronic game created by AkiMaiata and AkihiroYokoi in 1996.[10] Final Experimental Demonstration Object Researchç.[11] Facial Automaton for Conveying Emotions, developed by researchers at the Piaggio centre.
25Thinkdiid n.67/2019
Think
Sonia Capece
The mechanistic question of design In the mechanical era, design has contributed to making machines more user-friendly, through morphological, functional, intuitive and captivating variants to improve the user experience while in the digital era it has been credited as an understandable interface of intangible reality (Trabucco, 2015, p. 20).The rela-tionship between material and digital becomes more complex every day. The two dimensions, which a decade ago were far from each other, are engaged today in a continuous dialogue and process of contamination and redefinition.With the emergence of complex needs, the relationship between the idea of machine and the idea of human emerges through a new perspective that can be expressed respectively in electronic engineering and in design that tends to introduce the corrective of a humanizing image (Frateili, 1995, p. 102).The exaltation of the artifice influences the creative sphere of the project to the use of analogue simulation to communicate “the sense of the artefacts”. Thus, design is increasingly involved in the representation of a digitized image interested in the programmability of the operation and animation of intelligent and interactive objects and IT equipment, a concept defined by Frateili as "pansensory".In the mechanical era, “intolerance towards linguistic codification, of the stiff-ening of design knowledge, of the very conception of the machine-object, whose proliferation was exalted in its own connotations and suffered as a metastasis nestled in the heart [...] of well-being, was equally shared” (Vitta, 2001, p. 293). The conformation of the products came out of the rigid “orthogonality” that European rationalism had impressed on the products by operating according to complex mathematical models, which the new materials and new techniques allowed to create.Design was born along with the machines; indeed, it was born to give shape to the machines. These were rational devices made from components that used to collaborate and perform the function of the machine. The idea that design should express such rationality was entirely legitimate, almost implicit with the very idea of the machine: this is where concepts like “useful means beautiful”, “less is more”, found their origin (Trabucco, 2015).The designers are confronted with the principles of f lexibility and functionality, and with a strong connotation based on the formal and technological aspect of the artefacts to rethink the new behavioural scenarios.Since the artefacts were transformed into information tools, the task of design was not only to chase the shape but to capture the appearance (Vitta, 2016) in order to be able to offer adequate answers and to satisfy the user’s needs. Man becomes the fulcrum around which the process revolves to design the expe-rience and guide behavioural, taste, lifestyle and consumption trends. Distinctive characteristics are conferred such as the ease of use of the products; the satisfaction of ergonomic and physiological needs; the functionality of the products and the harmonious conformation achieved with simple artefacts and intelligent design.
The extension of the technological potential breaks the “sound of reality” (Frateili, 1995) to invest in the sophistication (Maldonado, 1992) of advanced techniques and the implications on the life and culture of our time with the introduction of machines with an advanced interactivity, high decision-making skills and self-learning possibilities that allow them to adapt immediately to “environ-mental variations” and to the performance of complex tasks even in unconventional industrial sectors. The paper gives an interpretative key to reflections on contempo-rary design that is confronted with new problems, such as the use of new technologies resulting from the digital revolution and the transition from a mechanization phase of production processes to a new human-machine relationship and to the awakening of intelligence and emotions in real time. Design on the robotics scene opens a space for comparison between the sensitive and the intelligible, between the illusion and the shared beliefs, created starting from the relationship between the sensitive subject and the perceived object that both merge in the horizon of sensations. From artificial to natural, design, science and technology create new “multimaterial” dialogues and new synaesthetic connections through “self-transforming” and “augmented” machines and envelopes that skilfully combine last generation robotics, light-shaping technology and digital information in this space there is the labyrinthine vision of a “vegetation” that is at the same time domesticated and unknowable reflection on the relationship of contemporary man with the artificial element, in which the design takes advantage of the ideas from other areas of study related to the theme of robotic planning, to help improve the relation-ship between technologies and users, creating a calibrated and conscious interaction. This vision, in addition to involving extremely interesting consider-ations regarding the interaction between people, leads us to ask ourselves how in this historical moment we live the relationship between mind and body. Today it is of strategic importance to develop an emotional and empathic approach where design and technology can be valid allies to overcome sensory barriers, offering new and engaging ways to enjoy everyday life.
Robotics on the design scene
[ robotic symbiosis, design, multi-sensory culture, body intelligence, synaesthetic emotions, increased perceptions ]
Researcher, Università degli Studi della Campania "Luigi Vanvitelli"
2726 ThinkDesign and Technologies
In just a few years, Design has seen the changes of both the daily practice of a profes-sion – due to the radical mutation of the means, tools and techniques for the project development and representation – as well as that of the design contents and the fields of application, which have been extended from physical or digital products to services and systems of social organization (Trabucco, 2015).Essential questions arise in the design of machines and appliances, concerning the way of use, the ability to interact with the user, solving interface relationships on a pragmatic and psycho-perceptual level to make the man-machine dialogue “facilitated” through a captivating effect, a stimulating appearance and greater humanization (Frateili, 1995). The consequentiality between form and function is called into question when the rela-tionship between the operator and the tool is not directly performative but mediated by the communication that oscillates between utopian visions and nefarious horizons. It is in this perspective that design, in an anthropocentric vision, becomes the key to understanding modern complexity, which requires multidisciplinary knowledge to understand the needs and provide adequate design answers in a dimension of the world made of idealized machines that satisfy the deep desire of order and satisfies the pleasure for things once animated and artificial, but subject to control even if remote (Noble, 1993, p. 100). A knowledge that Arcagni defines machinistic precisely for the determinism that underlies any type of materialistic and mechanistic vision that places at its base a paral-lelism between machine and forms of animal life.“So that the world seems to lose the stability and the weight that we attributed to it, to the point of seeming fluid, light and, above all, inconsistent” (Manzini, 1990, p. 28).Already in the late 1920s, Munari clearly warned of the possible conflict between man and technical devices and sensed that it would have been impossible to ignore technological progress. He conceives useless machines to make us think, through the synthesis of an oxymoron, on the uselessness of what is useful (the machine) and on the usefulness of what is useless (art), he uses technological principles and gears to be able to arouse in the viewer – through dynamic transformation – the perception of an unstable form following a path of rational thought which evolves from the forms of concrete abstractism towards a programmed art, the result of a design method based on construction rules.In a contemporary vision, Maholo Uchida's research work, on the other hand, leads us to reflect on how technology can support the individual in the design of intelli-gent machines, disregarding their sensitivity and intelligence to overcome the contrast between man and machine (See Micelli) to identify an imaginary of coexistence based on innovative aesthetics and original forms of interaction.Relationships and communications are established between natural and artificial worlds without intermediaries using multi-sensory approaches – made of gestures, images, sounds, narrations – where robots are able to communicate with each other and with humans, using the same verbal or gestural language – to understand the fundamental conditions and the necessary decisions to be made or not.
What Maldonado defines as “prosthetic artefactual moment” is created, which to a greater or lesser extent subverts the concepts of time and space and acts as an instrumental device intended to enhance our operational and communicative action through a sensory experience of “increased corporeality”.We are dealing with an augmented and interconnected intelligence (de Kerkhove, 2018) which materializes in what Arcagni defines as a new “panocular” utopia that strongly believes in the possibility to glance everywhere and anytime.With the telegraph, the Western man began to stretch his nerves out of his body. The previous technologies were extensions of physical organs: the wheel is an elongation of the feet; the city walls represent a collective exteriorization of the skin. The electronic media, on the other hand, are extensions of the central nervous system, namely an inclusive and simultaneous environment (Arcagni, 2018).The “prosthetic body” acts as a technical subject assuming an operational relevance to know reality, increase human faculties and make us effective in performing with the world and with others. Human friendly machines, elastic and gentle to the touch and in contact with man, capable of using our tools and furnishings. Equally promising is the use of these machines in medicine, as cognitive tools in diagnostics, in surgery, in an interactive multidimensional relationship – visual and tactile – with the human body.
It may seem absurd to note how, precisely where the themes of advanced technology would suggest a reduction in “talkativeness”, freeing the design from reflecting the function destined to remain “silent”, instead gives rise to the search for the most conspicuous imagination. (Frateili, 1995, p. 102)
Design manages - through a multidimensional language - to convey a range of appropriate meanings and, undoubtedly for an artefact, it is part of the sensitive and intelligible function that can be achieved through a sensory mutation (Branzi, 2006), in which the perceptual sensitivity of man evolves. The approach changes, the “immersed” user becomes an actor of the space that uses and interacts with the surrounding environment, he changes and adapts, making interaction an individual and active experience where the designer passes from analyst to observer of reality user experiences, capturing and interpreting their own “stories”. Through the observation of human behaviour, attitudes and facial expressions (De Luca, 2016), design makes use of the support of cognitive sciences, highlighting their behaviours and characteristics to rework the links between the artificial and the natural, between the human and the non-human, between memory and innovation.
Robotic symbiosis and increased perceptionsAlready accustomed to moving without friction from one dimension to another, we perceive its boundaries less and less: we rediscover the senses on a digital level by learning to manage the multitasking universe in which we navigate and connect with the whole world. We live in a material body and manipulate synthetic objects in
2928 ThinkDesign and Technologies
front of a screen immersed in virtual reality. We occupy physical, mental and virtual spaces crossed with each other, but independent. These are connected, shareable, accessible, interactive and tactile spaces oriented towards multi-sensory culture (de Kerkhove, 2018).The current historical moment is characterized by a complete separation between two great alternative narratives – one of emancipation, detachment, modernization, progress and domination; the other, completely different, of attachment, precaution, interconnection, dependence and care – and then the word “design” could serve as an important litmus test to detect where we are going (Latour, 2009).The dual role of design emerges on the one hand to interpret the sense of one's time dictated by complexity, symmetry and unpredictability and on the other to partici-pate in the construction of the experience of the modern time.
It was possible to take all the rigidity out of the human-keyboard-screen posture in order to facilitate the migration between world and “beyond world”. Both the selec-tion of this posture and the invention of the “beyond world” were two fundamental choices that were waiting technology to provide a design which could make them shareable with most human beings. (Baricco, 2018)
Human-machine interaction, artificial intelligence, multilingual digital culture open unexpected scenarios in contemporary design, with the creation of works in which the analogue and digital dimensions come together to enhance the experi-ence. Although we are now addicted to technological and formal innovations, they continue to spread around us an ingen syla of mysterious presences, whose exotic character is multiplied by the technical perfection that conceals unknown universes behind the apparent ease of operation (Vitta, 2016). Where technology offers interaction with people, understanding of how it works is largely determined by the usability of the system; the comprehensibility of the available information; the language and the ease with which it is possible to conduct input and output procedures. It is necessary to configure an interactive technology in which robots can adapt intuitively to the human environment and be able to recog-nize gestures and expressions, objects and situations.
The designer, in the continuous integration of the human with the technology, confronts the perceptual bond of man, the “external” reality, the plausible imple-mentation of cybernetic grafts within the human body and the development of revolutionary neural interfaces that will determine a greater transparency of augmented reality and augmented cognition. (Marras & Mecacci, 2014)
The connection changes the nature of objects, by transferring the sense of physicality to the ways of interaction with the user for an immediate and intuitive approach in a complex interaction between technological, economic and political factors.
Use, possession, interaction with a machine can generate different types of cogni-tive perceptions and emotional responses. We move from a physical to a mental commitment, shifting the load from muscle to perception, and a direct link between user-machine-production is established since the relationships with the context cannot be understood without implementing forms of active user involvement. The main problem with such interactions is vision. The recognition of “artefacts” starts from sensory understanding and robots are unable to recognize and under-stand what they see. This is because they are unable to contextualize what derives from changing images where the possible variations are countless (Byron, 2019). Think of how is sophisticated the communication code between human beings that accompany voice communication with facial expressions, gestures and movements that are very difficult to imitate and understand for a machine.Culture is in gestures, in daily rituals and looks, it feeds on relationships and sharing. The simple interpretation of the gesture of “indicating a direction” with the look, with a hand or with a movement of the face represents an enormous difficulty for a robot, while it is the basis of one of the forms of human communication. Humans experience and understand the world through the body and sense organs. By doing this, they create their interpretation in the form of cognition. The body is the medium that acts as a link between man and the world and between subject and object (Cingolani, 2015). The latter is an aspect often forgotten by technology enthusiasts. Creating intelligent machines means creating interaction, symbiosis and cooperation with people and with other “intelligent machines” (Norman, 2008). In order for these applications to be practicable, it is necessary to achieve a high level of performance in which the humanoid will have to recognize the user's intentions and use behavioural patterns to predict and avoid contact when it is not necessary (Cingolani, 2015). Another direction is that of the man-machine symbiosis which is closely linked to a new “eye” (Arcagni, 2018), no longer mechanical and external, but implemented in the human body. This is less subject to mechanization but a hybrid product of biology and human-machine genetics.
On the one hand, biologists are deciphering the mysteries of the human body, espe-cially the brain and feelings, while computer scientists provide us with the power to process data never known before. [...] When the revolution of biological technologies will join the revolution of information technologies, it will produce algorithms that will also be able to understand and control feelings. (Harari, 2019, p. 87)
The research areas on which these technologies are based are manifold and so many scientists all over the world are engaged in an unprecedented interdisciplinary effort: engineers, physicists, chemists, biologists, neuroscientists, psychologists and designers work side by side to decode and reproduce the solutions developed on humans (Cingolani, 2015). What makes design different from other fields involving project expertise is precisely the relationship that artefacts establish with the body.
3130 ThinkDesign and Technologies
Design products interact with the body directly, actively and mutually. A relationship different from the engineering project centred on the optimization of functional and operational aspects independent of the body, also different from the architectural project where the body is an entity which depends on the space (Riccini, 2015). Design moves to the territory of experience planning by incorporating perceptual, interactive and value issues (Trabucco, 2015) and touches the future of social and affective informatics where technology can contribute not only to functioning, but to the expressive and emotional plot of people's lives (Hansen, Kozel, 2007). It is necessary to develop synergistically technologies capable of reproducing the unique link between body and mind that characterizes living beings by prefiguring a sensorial, tactile, visual and auditory system perfectly integrated with the body to detect the stimuli of the environment in real time: from the machines designed for everyday life that have ample freedom of movement to those with a certain autonomy up to robots inspired by living beings, humanoids, quadrupeds, birds, capable of interacting with and assisting the human being. The myth of the robot sums up all the ways of the unconscious in the realm of the object. It is a symbolic microcosm of man and of the world as a whole. It is the synthesis between absolute function-ality and absolute anthropomorphism. It is the mythological realization of a naive phase of the imagination: the projection of a continuous and visible functionality (Baudrillard, 2007). Beyond functional correspondence, some systems represent the assumptions that contribute to defining the meanings of the contexts where people live, tools on which people build their identity. This path, which we can recognize as inevitable, still requires a considerable amount of effort by scientists and engineers in designing intelligent robot shapes with bodies suitable for moving in complex environments, to interact with a world designed and organized on a human scale (Mazzolai, 2019).The robot artists who draw, paint, sculpt, create buildings and objects, are devoid of a human faculty: imagination. They have no feelings, anxieties, concerns. They must move in a conditioned ability (Trione, 2018). And it is precisely the imagination that represents the means to visualize, to make what fantasy and creativity think (Munari, 1998). Imagination goes beyond thought. It is necessary to plan the future, to define it by putting into play all the technical and intellectual skills available in addition to the designer’s creative and imaginative skills.Humans record the decisive need to broaden the imagination around the technical consequences of technological and scientific change. The intimate connection with categories such as creativity, utopia, innovation, vision, project places the imagination at the centre of the transversal reflection since it is among the salient features of the design practices (Riccini, 2016).
Body as a “design object“The truth is that humanity is increasingly detaching itself from body intelligence. We are increasingly mind, like a computer. The body remains “behind”, so we work
to equip it with wearables. We are becoming profoundly different, and it seems that many people are unaware. The brain is changing, as well as the body, increasingly weak, less resistant and more needy (Manzoni, 2019). From physics to biology, from social sciences to computer science, the designer becomes a catalyst for different know-how, to design answers – even temporary – to major problems of our time that amplify the person's potential.Now more than ever “body and technologies” represent a central combination in the contemporary world. The body is considered both the origin of the sense of space and that of sociality. It has always been made artificial, equipped and tech-nological (Riccini, 2015). In our society the mixture of body and technology has taken on an extraordinary importance and has gone so far as to call into question our own identity. For Stelarc the body should no longer be considered as a subject, but as an object, and not as an object of desire, but as an object to be redesigned. Changing the architecture of the body means adapting and extending awareness of the world, the body can be amplified and accelerated up to the planetary escape speed (Stelarc, 2015). Within a few decades, research has led to methods and technologies for direct human-computer interaction, through neural signals captured with methods that were first invasive (implanted electrodes) then semi-invasive (contact electrodes) and, finally, apparently non-invasive (electromagnetic fields, ultrasound).With the aim of creating an increasingly efficient and pervasive connection of the human brain through the use of machines, brain-computer interfaces are being created. Important scientific discoveries propose to increase the physical and cogni-tive abilities of the human being through brain-machine interfaces to speed up communication and sharing. Primary objectives of these projects will be to help paraplegic or amputee people to control devices with their mind, those who have suffered brain or spinal cord damage to recover the sensitivity of parts of the body and to allow the control of bio-mechanical prostheses with the necessary developments regarding sight, hearing and touch.The environment becomes an extension of our body and a sort of symbiosis with artificial intelligence to generate “digital super-intelligences”. It is not the “brain” that perceives the world, it is the different interactive relationship with the world that extends and amplifies the perceptual, cognitive, emotional and creative possibilities of the “mind” (Clark, 2008).Today we are able to make, at least up to a certain point, machines that read thought. There are devices, such as mind-controlled hand prostheses whose finger movement can be controlled by thought connected to an electronic glove with vibrating fingers or alternatively through systems to be placed behind the ear with which the machine reads our brain inputs. In this way the user will be able to interact with computers and the hi-tech resources of knowledge, information, learning will even enable the strengthening of the brain and human thought.
3332 ThinkDesign and Technologies
Another revolution will consist, as Elon Musk claims, in the design of electrodes which, in addition to reading the data, will allow to send information directly to the neurons, bypassing the areas possibly damaged by trauma or dysfunction.It is proposed to make the machine perform even simple movements, through processes of transmission of electrical signals that reproduce the way the brain's neurons communicate with each other. This step would help to understand the operating levels of ever-increasing complexity and the knowledge acquired would find useful applications in the diagnostic or therapeutic field, such as in the treat-ment of stroke, neurological diseases, up to cognitive and behavioural problems (Mazzolai, 2019). Maybe the time has come to design the body.
The ability to transform ourselves through intentionally designed technologies and processes is a symptom of the power of the individual who, sooner or later, comes to use on himself every technique, every substance, every alterative procedure, even just to counteract cellular aging or, to create your own physical (robot) or digital avatar. (Celaschi, 2016)
We must guide the body-implant and increase the brain. We need to provide ways to connect it to the computer network. At the moment this is not easy, and it is done indirectly via keyboards and devices. There is no way to connect directly. In addi-tion, we experience the characteristics of certain areas of our brain as constraints. Emotions are nothing more than reaction or assessment programs to stimuli / situ-ations generated externally or internally to the individual and with a corresponding physiological activation (Manzoni, 2019). We must think of a “new” robotics that knows how to respond to the need to build machines capable of operating in contexts outside of factories and in environments that we could define as changing, unstructured and less predictable. Solutions that, like a second skin, will change morphology according to the needs that will grad-ually be configured, trying to explore the direct control of movement with neural commands from the brain in order to effectively control the environment with thought, could be conceived.
References
> Arcagni, S. (2018). L’Occhio della macchina. Torino: Einaudi. > Baricco, A. (2018). The Game. Torino: Einaudi. > Branzi, A. (2006). Modernità Debole e Diffusa. Il mondo del progetto all’inizio del XXI secolo. Ginevra-Milano: Skira. > Byron, R. (2019). La quarta era. Robot intelligenti, computer consapevoli e il futuro dell’umanità. Milano: FrancoAngeli. > Celaschi, F. (2016). Non industrial design: contributi al discorso progettuale. Milano: Luca Sossella. > Cingolani, R., & Metta, G. (2015). Umani e umanoidi: Vivere con i robot (Intersezioni). Bologna: Società editrice il Mulino. > Clark, A. (2008). Supersizing the Mind. Embodiment, Action and Cognitive Extension. New York: Oxford University Press. > de Kerkhove, D. (2018). Il futuro della memoria. Roma: Castelvecchi. > De Luca, V. (2016). Oltre l’interfaccia: emozioni e design dell’interazione per il benessere. In Material Design, MD Journal. Scientific journal of Design in Open Access. > Frateili., E. (1995). Dieci lezioni di disegno industriale. Breve storia (p. 102). Milano: Franco Angeli. > Hansen L.K., Kozel, S. (2007). Embodied imagination: a hybrid method of designing for intimacy. In Digital Creativity, 18(4), 207-220.> Harari, Y.O. (2019). 21 lezioni per il XXI secolo. Firenze: Giunti. > Latour, B. (2009). Un Prometeo cauto? Primi passi verso una filosofia del design. E|C Special series, Year III, nn. 3/4. > Maldonado, T. (1992). Reale e Virtuale. Milano: Feltrinelli. > Manzini, E. (1990). Design come arte delle cose amabili. In Op. cit., (78, p. 28). Napoli: Il Centro. > Manzoni, N. (2019). Transumanesimo, ‘fashonology’ e supereroi: la trasformazione dell’uomo. In Visionari. Scienza e tecnologia al servizio delle persone. Retrieved from http://www.medium.com
> Marras, L., & Mecacci, A. (2014). La sparizione del design. Parte III: More is Less, Firenze: University Press Aisthesis. > Mazzolai, B. (2019). La natura geniale. Milano: Longanesi. > Micelli, S. (2018). Le vie della manifattura. Made in Italy, la sfida di empatia e tecnologia. Il sole 24 ore. > Munari, B. (1937). Che cosa sono le macchine inutili e perché. La Lettura (n. 7, july). In M. Hajek, L. Zaffarano, & Munari, B. (Eds.), (2012). My Futurist Past. Milano: Silvana Editoriale. > Munari, B. (1998). Fantasia. Invenzione, creatività e immaginazione nelle comunicazioni visive. Bari: Laterza. > Noble D.F. (1993). La questione tecnologica (p. 100). Torino: Bollati Boringhieri.> Norman, D.A. (2008). Il design del futuro. Milano: Apogeo.> Riccini, R. (2015). Artificio e trasparenze. Il corpo sulla scena degli oggetti. In M. Ciammaichella, Il corpo umano sulla scena del design. Padova: Il Poligrafo. > Riccini, R. (2016). Immaginario del design fra tecnica, estetica e progetto. In P. Proverbio & R. Riccini, Design e immaginario Oggetti, immagini e visioni fra rappresentazione e progetto. Padova: Il Poligrafo. > Stelarc (2014). On the Body as an Artistic Material. Interview with Stahl Stenslie. The Journal of Somaesthetics (n. 1). s.n.> Schwartz, J. (1993, 30 settembre). Obesity affects economic, social status. The Washington Post, pp. A1, A4.> Trabucco, F. (2015). Design (p.20). Torino: Bollati Boringhieri.> Trione, V. (2018) Che reinventa tutte le arti. Pinocchio è un robot. Corriere della Sera. > Vitta, M. (2001). Il progetto della bellezza. Il design tra arte e tecnica, 1851-2001 (p. 293). Torino: Einaudi.> Vitta, M. (2016). Le voci delle cose. Progetto idea destino. Torino: Einaudi.
35Thinkdiid n.67/2019
Think
Lorenzo Imbesi
From Homo Sapiens to Homo TechnologicusIn the movie A Space Odyssey, one of the initial scenes presents an era with great apes that feed on low-ranking animals, until the time when, instead of taking the leftover bone from the meal and throwing it away, as waste, he brandishes it as a weapon and makes it an instrument, that is, transforms the object from neutral to an object full of active meaning and knowledge. At this point begins a story that never stopped: the history of man, who builds the tools to know the world and to act on the world, and the history of technology are intimately connected.There is no separation between man and technology: these are entities that are together. Man has always hybridized with technology: man is a symbiote, in its nature, both biological and technological. Man has continually been transformed into something latent within himself, acquiring new potentials, which were not visible before, but which then emerged with technology, thanks to the instrumental use. The instruments do not remain only instruments but transform the essence of man, his ontology into something else.Giuseppe Longo (2003) states that “since its appearance, our species has hybridized with the tools we build, so defining homo sapiens a homo technologicus, a symbol of man and technology: after all, man has always been in symbiosis, not only with its tools but also with bacteria, food, medicines, plants, pets. Technology is a filter, so enhancing (or even bringing out) some characteristics, physical or cognitive, and weakening or cancelling others. In particular, information technologies have enhanced the rational-computational capacities of the human-computer symbiote to the detriment of the emotional, ethical, aesthetic and expressive faculties.The evolution of technology powerfully contributes to our evolution, indeed now (almost) coincides with it: biological evolution and technological evolution are inter-twined in a 'biotechnological' evolution. Of course, the tools of the past until the mid-1900s were not so refined and powerful enough to make this process of hybrid-ization and transformation visible, but with the advent of calculating and symbolic machines, such as the computer, which has then constituted the great metaphor of the “brain as computer”, information and communication technology have contributed to creating a visibly new being.We are hybrids of men and machines: we all continuously use not only the car, but also the machines of the mind, which are more subtle and affect our way of thinking, of making culture, of transmitting learning and notions, and so creating knowledge. In the machines or in the artificial systems that we are creating, there is a transformative potential that cannot be underestimated. We are not “simple” human beings in the sense of homo sapiens, but human beings imbued, impregnated with technology: a species that could be called homo technologicus, inseparable from our technology.The invention and the use of the tools is configured not so much as the addition of prosthesis, but as a real hybridization: while the prosthesis compensates for a compromised or lost ability, each new apparatus gives rise to an evolutionary unity (a symbiont) of a new type, in which perceptual, cognitive and active capacities can
In the myth of Prometheus and Epimetheus, Plato describes the technical action of the man, as a force inherent in the evolution of humanity: “[...] all living beings harmoniously possess everything, and [...] instead the man is naked barefoot, without bed and arms: the fatal day was imminent, the day when the man had to come out of the earth into the light. Prometheus then, finding himself in great embarrassment for the salvation of the man, steals technical knowledge together with fire from Hephaestus and Athena [...] and gives it to the man” (Plato, 1992), to develop the ability to produce tools, developing their technical knowledge.Man is therefore characterized by being homo faber, even before being a thinking being, that is the being who through the artifact (from the Latin manu factus, made with the hand), modifies the reality that surrounds him to his advantage.The French philosopher Henri Bergson defines intelligence as the ability to manufacture artificial objects and tools, producing other tools. The development of technique acquires the aspect of arti-ficiality, in the sense that the world in which we live is a world of artifacts, of products determined by man’s creative activity. Tech-nique is what opposes nature in that it modifies and anticipates it. Art, artifice, artifact, products of the technique are creations and creators of an artificial system. In other words, man takes away the privilege of creation from nature, to deposit it in his own hands, showing an organic specificity in the connection between techno-logical action and human organism.The theories of technology show a scenario of high complexity in which the history of humanity is not written in one direction and equally where he is not alone to design, build and determine his fate but is always in the company of technological frameworks that condition it, to the point of expropriating its productive power. After the invention of tools by his hands, man built machines for producing other tools, which in turn were made by more productive machines, up to feed a loop in which the technique becomes more and more indirect as in an autopoietic system. The history of technology can be told as a history of productive circumvention (Popitz, 1996), in which winners and losers often get confused, and the ending is never taken for granted.
Design téchne and lógos
[ autopoiesis, cyborg, homo technologicus, technological framework, scot, symbiote, tecnoscience ]
Full Professor, Sapienza Università di Roma
3736 ThinkDesign and Technologies
emerge, whose limits cannot be indicated. Just as man makes technology, so tech-nology makes the man. The 'man-with-the-computer' cognitive unit is radically different from the 'man-without-computer' cognitive unit. Homo technologicus is not 'homo sapiens plus technology', but it is 'homo sapiens transformed by technology' (Longo, 2002).Likewise, the symbiote lives in an artificial environment, strongly marked by infor-mation, symbols, communication, and increasingly by virtuality. Therefore, if technology and man are connected to each other in a substantial and indissoluble way, it is equally incorrect to say that technology dehumanizes man. At the same time, the relationship between man and machine (or somewhat between the different components of the symbiote) shows disharmonies due to more or less transitory forms of incompatibility. Here the efforts of the design project are concentrated towards the construction of 'sociable' (user-friendly) machines, to extend the anesthesia zone where artificial components can creep in.
Machines of the Mind In the twentieth century, for economic reasons and its self-catalyzing nature, tech-nology underwent a strong acceleration: information technology arose alongside information and material technologies, building the machines of the mind, i.e. the data processing and transmission, computers and networks. The calculator allowed an extraordinary development of simulation, greatly influencing our perception of time.Computer science has allowed and imposed a new type of grammatical and structural analysis of languages: with the advent of artificial intelligence, we have ventured towards new concepts of learning, epistemology, and the mind-body relationship. Furthermore, virtual reality promises us fantastic walks in cyberspace whose borders and landscapes are still unknown. This process of intimate artificialisation of the human landscape has made even more evident how much technology is an essen-tial component of man, connecting to his primary and profound needs, to his very survival, and is rooted in the evolution that led to the birth of 'homo sapiens in the direction of homo technologicus.In the Dialectic of Enlightenment, Adorno and Horkeimer (1966) emphasize the link between technology and society: sciences are not only a logical-empirical procedure but a social fact. Science and technology know the world because they produce it. Technology ceases to be “only” the producer of tools, and together tools play a role in the ways and forms of knowledge. Action and knowledge are therefore deeply intertwined: if tools are catalysts and filters of knowledge, technology also becomes a matrix of culture. While science has always tried to bring out complexity to reduce it and explain its reasons through descriptions and theories, technology tends to hide the complexity of the artifacts under a surface or an “interface” of greater simplicity and operational effectiveness. Here are the reasons for the project that fits into the operational space between science and technology to develop its ultural dimension.
The CyborgDonna Haraway can be considered the architect of cyberfeminism, which deepens the relationship between science and gender identity, investigating the implications of technology and science on life.According to the American scholar:
western culture has always been characterized by a binary structure revolving around pairs of categories, such as the combination of man and woman, natural and artificial, body and mind. Such conceptual dualism is not symmetrical, but is based on the predominance of one element over the others: in the western tradition, persistent dualisms existed and were all functional to the logic and practices of domination over women, colored people, nature, workers, animals: that is, from the dominion of whoever was built like another with the task of mirroring the self ”. (Haraway, 1995)
Donna Haraway introduces the figure of the cyborg taken from science fiction, which becomes a metaphor for the human condition and claims that the natural tendency of human beings is to rebuild itself through technology, to distinguish itself from the other biological forms of the planet. Such project starts from the early forms of manipulation of the human body and continues with the use of technological prostheses and the development of genetic engineering, the desire to improve what determined nature would be at the very origins of human culture. The cyborg is both man and machine, an individual who is not sexed or located beyond the categories of gender, a creature suspended between fiction and reality: the cyborg is a cybernetic organism, a hybrid of machine and organism, a creature that belongs as much to social reality as to fiction.This figure allows us to understand how man's alleged naturalness is only a cultural construction since, in the end, we are all in some way cyborgs. The use of prostheses, contact lenses, by-pass are just an example of how science has pene-trated everyday life and has transformed the life of modern man in his intimate. Technology has mainly inf luenced the concept of the body, which becomes a territory of experimentation, of manipulation, thus ceasing to be an untouch-able simulacrum. If the body can be transformed and managed, the myth that sees it as the seat of a naturalness opposed to artificiality falls and consequently, the western system of thought centered on the binary opposition of antithetical elements goes into crisis, because it is no longer possible to think exclusively of man in biological terms.The cyborg is neither machine nor man, neither male nor female, located beyond the borders of the popular categories, and becomes the perfect meta-phor for the artificial environment, in which an organic/inorganic continuum is created, half between technology and meat, information and knowledge, technique and culture.
3938 ThinkDesign and Technologies
Technology as LiberationFor Arnold Gehlen, one of the first anthropologists of technique, this “is as old as man” and makes him capable of mastering the surrounding environment, domi-nating his actions: “the intellect allows the human being to free himself from his organic constraints to which animals must undergo, and enables him to transform nature according to his needs” (Gehlen, 1984).According to the Gehlenian perspective, the technique is a second nature, inherent in the human essence and without which man could not survive. "Being deficient”, without specialized organs with which to adapt to the nature of a particular envi-ronment, finds only in the technique the possibility of taking its place in the world (Gehlen 1984).Arnold Gehlen develops a decisive point in the description of the technique looking to man as an existence designed for action. It seems that the technique presents itself as a supplementary entity concerning the organic inadequacy and the biological insuf-ficiency of man in the process of appropriation of the natural substance. Man would need support to replace the shortcomings of his existence considered inadequate and would gain his liberation through technique. The evolution of techniques would be a progressive process of liberation, in which humanity aims at a complete emancipation from nature and the organic domain. Gehlen identifies three different progressive stages: the tool as an increase in organ production, the machine as an emancipation from the expenditure of physical force, and, in the case of automation, the liberation from physical and psychic work (Gehlen 1984).If, according to Gehlen, technique is a mean and technology is not averse to man, on the other side for Heidegger (2017), “instrumentalism” is instead an imperfect process: in the context of technique, the “tool” medium is likely to become the end. The German philosopher claims that man deludes himself into becoming lord of the earth in the instrumental use of technology, while instead, he alienates himself, loses his humanity, loses his freedom. Heidegger maintains that the very essence of technology cannot be something technical: technicalism precludes man's ability to relate authentically with the technique itself. The technique would not be a mere human activity but a destiny of being and, at the same time, a destiny from which human being itself escapes from. In the essay of 1938 entitled “The era of the image of the world”, Heidegger traces the history of science and modern technology, reading it as the construction of an image of the world that reflectively depends on the one who builds the image itself. Thus, the world becomes more and more the image of the world that we actively build with the technique, rather than a unique and unavoidable fact. The image of the world is no longer unique, but rather has a multiple and complex dimension, thus anticipating what the communication society will be. Likewise, Marcuse exposes the conviction that the technological transformation of nature also entails the transformation of man (Marcuse, 1998). According to Marcuse, technique is not a neutral phenomenon and its ultimate meaning depends on the ends that man imposes on his actions.
So far, the digital revolution seems to concern mainly computers, exponentially enhancing human abilities, but still limited to body capacities. In this regard, some speak of “unfinished revolution”, supporting the development of an “anthropocentric computer science” (Dertouzos, 2001): computers, generally, would still be deaf, blind and stupid, if compared to the wealth of human abilities.This is the sense of the desire for “invisibility” claimed by Donald Norman: machines must do what we want and not the other way around. "Technologies are not neutral. They affect the evolution of society, help some actions while they prevent others. Technology can help us, but it can also harm us. It is up to us, as individuals and as a society, to decide which course to take them" (Norman, 1990).
The Engine of HistoryTechnological determinism considers that every single technological medium can produce precise effects, thus underlining the relationship that exists between the technological supports used for communication and the cognitive processes that are in place: technology is as a decisive variable, capable of overdetermining others aspects of reality (economy; organization of work; culture).There is a recurring limit in deterministic approaches, and that is the tendency to examine not so much a precise technological history (an artifact; a production system), as the same technology as a category opposed to society.Technological determinism originally refers to the School of Toronto: Harold Innis, the historian of economics and founder of the School of Toronto attributed the characteristic features of ancient civilizations to the dominant communication techniques, which in turn reflected the different social forms. According to Innis and McLuhan, communication technologies have a real power to reconfigure reality, and the whole history of civilization becomes a series of compressions determined by the evolution of communication technologies.Another possible version of determinism comes from the history of technology by the category of “characterizing technology” coined by Jay David Bolter. The idea is that some technologies take on a particularly central role for their time, lending themselves as an ideal model and matrix for organizing knowledge. One of Marshall McLuhan's most famous slogans was the statement "the medium is the message”: the Canadian scholar intended to affirm that every medium influence thought, culture and society, also under its intrinsic characteristics, and not only of content that it conveys. Forcing this McLuhan thesis beyond the author's intentions, many other scholars of communication have developed a theory according to which the evolution of media is one of the fundamental, if not the main, causes of social and cultural changes. Technological innovation would be the result of an individual act that enrolls in the system of technology, but also the expression of a social instance that manifests itself and that influences its destiny. The French sociologist Patrice Flichy writes: “[...] in the classic approach (to the study of innovation), a black box is at the center
4140 ThinkDesign and Technologies
of each invention; only what is upstream and downstream can be explained in terms of sociological explanation. As regards what lies upstream, the social relationships and cultural models that the new entity incorporates, the choices that generated it, the logics it has harmonized, as regards what lies downstream, the implications of the uses they bring” (Flichy, 1996).
Socio-Technological FrameworksAn alternative to technological determinism is the theory that sees technological development far from following a linear path: the history of technology would rather be an alternation of variation and selection, in which technical and social aspects merge. This is the answer that comes from Trevor Pinch and Wiebe Bijkler, scholars of the European Society for the Study of Science and Technology, EASST (see: easst.net), according to which the history of technology does not follow a linear path, but instead proceeds along an alternation of variation and selection, in which technical and social aspects merge. An example is the history of the bicycle: the prototypes before the chain bicycle were of different types, but only one was affirmed. What the relevant social groups - that is, the institutions, organizations, groups, individuals of a society - considered the most suitable to solve the problems defined by the group itself (safety, speed of the vehicle, but also issues related to social customs: for example, in those days the use of trousers was not accepted for women). The proposed solutions are both technical (the presence of the brakes, the type of bike set-up), and social (for example, promoting a different consideration of the woman wearing the pants). The various technological controversies arising between the different possibilities are wiped out every time the social groups of reference consider the problem as solved. At this point, the object stabilizes and becomes a “black box” without many alternatives. This model, as explained by Nicola Nosengo in the book The extinction of the techno-saurs (Sironi, 2003), falls within the studies of the Social Construction of Technology (SCOT), which reads technology as a social construction, rejects the technological determinism according to which it is the technology that modifies society and not vice versa, and denies the distinction between technical, social, economic and political aspects of technological development.Based on the SCOT analysis on innovation, the diffusion and transformation of technologies in their social context, Michel Callon and Bruno Latour consider tech-noscience as a network that connects heterogeneous elements (social and technical, human and non-human) without the possibility of distinguishing them or hierar-chizing them.Resuming Patrice Flichy's analysis of innovation, the subjects involved in techno-logical development would seem to have different positions of strength: the large industrial groups, for example, can intervene with their ability to influence negotia-tion, making innovation to stand out. Patrice Flichy, when asked how technological innovation is born, answers on the assumption that it is not the direct result of scientific progress, but the product of
References
> Adorno, T., & Horkheimer, M. (1966). Dialettica dell’illuminismo. Milano: Einaudi. > Bergson, H. (2002). L’evoluzione creatrice. Milano: Raffaello Cortina. > Dertouzos M.L. (2001). Unfinished Revolution. New York: HarperCollins.> Flichy, P. (1966). L’ innovazione tecnologica. Le teor-ie dell’innovazione di fronte alla rivoluzione digitale. Milano: Feltrinelli.> Gehlen, A. (1983). L’uomo, la sua natura e il suo posto nel mondo. Milano: Feltrinelli.> Gehlen, A. (1983). L’uomo nell’era della tecnica. Milano: SugarCo. > Gehlen, A. (1987). Prospettive antropologiche. Bol-ogna: Il Mulino. > Haraway, D.J. (1995). Manifesto Cyborg. Donne, tecnologie e biopolitiche del corpo. Milano: Interzone Feltrinelli.
> Heidegger, M. (2017). La questione della tecnica. Firenze: Goware.> Longo, G.O. (2002). Homo technologicus. Roma: Meltemi.> Longo, G.O. (2003). Il Simbionte. Roma: Meltemi.> Marchesini, R. (2009). Il tramonto dell’uomo. Roma: Dedalo.> Marchesini, R. (2002). Post-human. Milano: Bollati Boringhieri.> Marcuse, H. (1998). L’uomo e i sentieri della tecnica. Roma: Armando.> Norman, D. (1990). La caffettiera del masochista. Psicopatologia degli oggetti quotidiani. Milano: Giunti.> Nosengo, N. (2003). L’estinzione dei tecnosauri. Storie di tecnologie che non ce l’hanno fatta. Milano: Sironi.> Platone (1992). Opere complete. Bari: Laterza. > Popitz, H. (1996). Verso una società artificiale. Roma: Editori Riuniti.
continuous and open interactions between entirely different social actors. Flichy divides the “socio-technical framework” of an artifact between a functioning frame-work and a framework for use. A functioning framework is a set of practices and knowledge which is mobilized in the course of a technological activity. A framework of use is what is necessary to know to use an artifact and the purposes for which it is used. “Contrary to what has always been thought, the invention is not the sum of a brilliant Eureka! And of a circulation process. On the contrary, it is the meeting of parallel stories, later adjustments, comparison and negotiation, reduction of uncer-tainty”, as Flichy explains. “The extinct or never 'born' technologies, the technosaurs in fact, would be the failure to weld between an operating framework and a usage framework, or the breaking of a now worn-out bond”.The analysis of social constructivism is directing us in a world that has gradually complexed in the mutual influence between technique and society, thanks to the knowledge and increase of technological frameworks, building a new awareness on how technology is used for domination and how machines dominate men. If tech-nology is built by society and if society presents itself as an articulated interweaving of biological and artificial matter, our environment of the present and the future will require new ways and design tools, once again able to surprise and change the history of men and women.
43Thinkdiid n.67/2019
Think
Bruno Siciliano
A brief history of roboticsThe dream to create machines that are skilled and intelligent has been part of humanity from the beginning of time. This dream is now becoming part of our world’s striking reality. Since the early civilisations, one of men’s greatest ambitions has been to create artifacts in their image. The legend of the Titan Prometheus, who molded humankind from clay, or that of the giant Talus, the bronze slave forged by Hephaestus (3500 BC), testify to this quest in Greek mythology. The Egyptians’ oracle statues hiding priests inside (2500 BC) were perhaps the precursor of our modern thinking machines. The clepsydra water clock introduced by the Babylonians (1400 BC) was one of the first automated mechanical artifacts. In the following centuries, human creativity has given rise to a host of devices such as the automaton theatre of Hero of Alexandria (100 AD), the hydro-powered water-raising and humanoid machines of Al-Jazari (1200), and Leonardo da Vinci’s numerous ingenious designs (1500). The development of automata continued to flourish in the eighteenth century both in Europe and Asia, with creations such as Jacquet-Droz’s family of androids (drawer, musician and writer) and the kara-kuri-ningyo mechanical dolls (tea server and archer).The robot “concept” was clearly established by those many creative historical real-isations. Nonetheless, the emergence of the physical robot had to await the advent of its underlying technologies of mechanics, controls, computers and electronics during the course of the twentieth century. As always, new designs motivate new research and discoveries, which, in turn, lead to enhanced solutions and thus to novel concepts. This virtuous circle over time produced that knowledge and under-standing which gave birth to the field of robotics, properly referred to as: the science and technology of robots.In 1920, the term robot – derived from robota which means subordinate labour in Slav languages – was first introduced by the Czech playwright Karel Čapek in his play Rossum’s Universal Robots (R.U.R.). In 1940, the ethics of the interaction between robots and humans was envisioned to be governed by the well-known three fundamental laws of Isaac Asimov, the Russian science-fiction writer, in his novel Runaround.The middle of the twentieth century brought the first explorations of the connec-tion between human intelligence and machines, marking the beginning of an era of fertile research in the field of Artificial Intelligence (AI). The early robots built in the 1960s stemmed from the confluence of two technologies: numerical control machines for precise manufacturing, and teleoperators for remote radioactive mate-rial handling. These master-slave arms were designed to duplicate one-to-one the mechanics of the human arm, and had rudimental control and little perception about the environment. Then, during the mid-to-late twentieth century, the development of integrated circuits, digital computers and miniaturised components enabled comput-er-controlled robots to be designed and programmed. These robots, termed industrial robots, became essential components in the automation of flexible manufacturing
Robots are with us, within us and among us
[ life-inspired robotics, field and service robotics, robotic and human manipulation, design and human-robot coexistence ]
Full Professor, University of Naples Federico II
Robots! Robots on Mars and in oceans, in hospitals and homes, in factories and schools; robots fighting fires, making goods and products, saving time and lives. Robots today are making a considerable impact on many aspects of modern life, from industrial manufacturing to healthcare, transportation, and exploration of the deep space and sea. Tomorrow, robots will be as pervasive and personal as today’s personal computers and smartphones. This article retraces the evolution of this fasci-nating field from the ancient to the modern times through a number of milestones: from the first automated mechanical arti-fact (1400 BC) through the establishment of the robot concept in the 1920s, the realisation of the first industrial robots in the 1960s, the definition of robotics science and the birth of an active research community in the 1980s, and the expansion towards the challenges of the human world of the twenty-first century. Robotics in its long journey has inspired the Springer Handbook of Robotics which is organised in three layers: the foundations of robotics science; the consolidated methodolo-gies and technologies of robot design, sensing and perception, manipulation and interfaces, mobile and distributed robotics; the advanced applications of field and service robotics, as well as of human-centered and life-like robotics. In the last few years, the terms Artificial Intelligence (AI) and Robotics have been thrown together too easily and frequently interchanged in the media. The distinctions and commonalities between the two fields are clarified, and the big challenge for the scientific community is enlightened. The RoDyMan project is surveyed to emphasise the importance of manipulation in service robotics tasks. The inter-action between humans and machines is keenly characterised in terms of various skills and the role of design for the acceptability of robots in our society is finally discussed.
4544 ThinkDesign and Technologies
systems in the late 1970s. Further to their wide application in the automotive industry, industrial robots were successfully employed in general industry, such as the metal products, the chemical, the electronics and the food industries. More recently, robots have found new applications outside the factories, in areas such as home, search and rescue, underwater, space, and medical applications.In the 1980s Robotics was defined as the science which studies the intelligent connec-tion between perception and action. With reference to this definition, the action of a robotic system is entrusted to a locomotion apparatus to move in the environment (wheels, crawlers, legs, propellers) and/or to a manipulation apparatus to operate on objects present in the environment (arms, end effectors, artificial hands), where suitable actuators animate the mechanical components of the robot. The perception is extracted from the sensors providing information on the state of the robot (position and speed) and its surrounding environment (force and tactile, range and vision). The intelligent connection is entrusted to a programming, planning and control architec-ture which relies on the perception and available models of the robot and environment and exploits learning and skill acquisition.In the 1990s research was boosted by the need to employ robots to address human safety in hazardous environments, field robotics, or to enhance the human oper-ator ability and reduce his/her fatigue, human augmentation, or else by the desire to develop products with wide potential markets aimed at improving the quality of life, service robotics. A common denominator of such application scenarios was the need to operate in a scarcely structured environment which ultimately requires increased abilities and a higher degree of autonomy.The video Robots – A 50 Year Journey by Oussama Khatib (Khatib, 2000) shows the development of robotics through the first five decades.By the dawn of the new millennium, robotics has undergone a major transformation in scope and dimensions. This expansion has been brought about by the maturity of the field and the advances in its related technologies. From a largely dominant industrial focus, robotics has been rapidly expanding into the challenges of the human world, human-centered and life-like robotics. The new generation of robots is expected to safely and dependably co-habitat with humans in homes, workplaces, and communities, providing support in services, entertainment, education, healthcare, manufacturing, and assistance.Beyond its impact on physical robots, the body of knowledge robotics has produced is revealing a much wider range of applications reaching across diverse research areas and scientific disciplines, such as: biomechanics, haptics, neurosciences, virtual simulation, animation, surgery, and sensor networks among others. In return, the challenges of the new emerging areas are proving an abundant source of stimulation and insights for the field of robotics. It is indeed at the intersection of disciplines that the most striking advances are expected to happen.The video The Journey Continues (Siciliano, Khatib & Kröger, 2016) shows the inten-sive and vibrating evolution of robotics through the last fifteen years.
The handbookThe intensive stream of robotics research documented in the literature has culminated into a unique reference, which collects in one self-contained volume the most signifi-cant achievements of our international robotics community. The Springer Handbook of Robotics (Siciliano & Khatib, 2016a) presents a full coverage of the field from its foun-dations, through the research areas, up to the new emerging applications of robotics. Accordingly, the material is organised in three logical layers reflecting the historical development of the field.The foundations of robotics science, laid down in the first layer, address the theory of robot mechanics, sensing, planning, and control. The consolidated methodologies and technol-ogies of robot design, sensing and perception, manipulation and interfaces and mobile and distributed robotics are presented in the second layer. The third layer is devoted to advanced applications, such as in field and service robotics, and human-centered and life-like robotics.The handbook has been conceived to provide a valuable resource not only for robotics experts, but also for newcomers to this expanding field, e.g. engineers, medical doctors, computer scientists, and designers. Topical videos related to the specific contents of each chapter can be accessed through the web site of the multimedia contents associated with the handbook (Siciliano & Khatib, 2016b). The contents of the various chapters have been inspired by a classic cut, i.e. avoiding the inclusion of on-going or not well-established methods. An objective perspective has been taken, while covering multiple approaches, with the goal of ensuring a high archival value to the handbook. Each chapter is preceded by a short summary, and an introductory section providing the state of the art in the area. The core sections are developed at a tuto-rial level. Lengthy mathematical derivations have been avoided whenever possible, while the equations, tables, and algorithms are illustrated in ready-to-use form. The final section of the chapter provides conclusions and topics for further reading. From the foundations to the social and ethical implications of robotics, the eighty chapters of the handbook provide a comprehensive collection of five decades of progress in robotics.
AI, fleshed outSeveral definitions of AI can be found in the literature, and there seems to be no consensus in the scientific community towards a commonly unified definition. In computer science, AI, sometimes called machine intelligence, is the intelligence demonstrated by machines, in contrast to the natural intelligence displayed by humans. Colloquially, the term AI is used to describe machines/computers that mimic cognitive functions that humans associate with other human minds, such as learning and problem solving.On the other hand, the commonly accepted and crisp definition of Robotics in the scientific community is the intelligent connection of perception to action. Robots involve the physical world – not only brains (intelligence) and sensors (perception), but bodies (action) as well.
4746 ThinkDesign and Technologies
The well-known Moravec’s paradox is the discovery by AI and Robotics researchers that, contrary to traditional assumptions, high-level reasoning requires very little computation, but low-level sensorimotor skills require enormous computational resources. As Moravec (1988) writes, «it is comparatively easy to make computers exhibit adult level performance on intelligence tests or playing checkers, and difficult or impossible to give them the skills of a one-year-old when it comes to perception and mobility».A widely adopted way to visualise the importance of human senses is the so-called cortical homunculus, which is a distorted representation of the human body, based on a neurological map of the areas and proportions of the human brain dedicated to processing motor functions, or sensory functions, for different parts of the body. The sensory homunculus reveals that the sense of touch in the hands is the most developed sense in humans.Speaking about hands and intelligence, this dichotomy has profound philosophical roots. According to a recent debate (Maurette, 2018) «Anaxagoras says that man is the most intelligent of the animals because he has hands, while Aristotle asserts that man has hands because he is the most intelligent». A child learns to grasp a toy with his brain (intelligence), but also mechanically using the musculoskeletal structure of his hand. This concept is called embodiment which has led to developing the theory of embodied cognition. Along the same line is the inspiring paradigm for a craftsman’s skills, and how the work of the hand informs the work of the mind (Sennett, 2009).On the apparent dichotomy between body and mind, or intelligence, there are even more extreme points of view. Some argue that there cannot be any real intelligence without a body that moves and interacts with the world. An often-used argument is the sea squirt, a creature born as an egg which develops into a tadpole with a simple eye, a tail for swimming and a primitive brain of few hundreds of neurons. When grown up, the sea squirt finds a good place and settles in permanently. Subsequently it goes through a metamorphosis in which the eye, the tail, and the cerebral ganglion disappear or are reduced. Some say sea squirts eat up their brain when they give up motor control, although this characterisation may not be scientifically accurate (Dorit, Walker & Barnes, 1991).No doubt, in the last few years AI has become the keyword which defines the future and everything that it holds. Not only has AI taken over traditional methods of computing, but it has also changed the way industries perform. From modernising healthcare and finance streams to research and manufacturing, everything has changed in the blink of an eye. AI has had a positive impact on the way the Information and Communication Technology (ICT) sector has developed. Looking ahead, however, the further growth of the ICT sector might experience a sort of saturation. With the advent of Cyber-Physical Systems, as in the Industry 4.0 programme in Europe, new technologies such as 3D printing and Robotics have opened a new prospect for a gradual and radical transforma-tion from ICT to InterAction Technology (IAT), where the ‘A’ is intentionally capitalised to emphasise the importance of the physical action.
In parallel to the diffusion of AI, Robotics has reached an elevated level of maturity, and has benefited from major advances in its enabling technologies, including AI of course. Robots today hold the promise for making a considerable impact in a wide range of real-world applications from industrial manufacturing to healthcare, trans-portation, and exploration of the deep space and sea. Tomorrow, robots will become pervasive and touch upon many aspects of modern life. With the massive and pervasive diffusion of robotics technology in our society, we are heading towards a new type of AI, which we call Physical AI at the intersection of Robotics with AI, that is the science of robots and intelligent machines performing a physical action to help humans in their jobs of daily lives. Physical assistance to disabled or elderly people; reduction of risks and fatigue at work; improvement of production processes of material goods and their sustainability; safety, efficiency and reduction of environmental impact in transportation of people and goods; progress of diagnostic and surgical techniques are all examples of scenarios where IAT is indispensable.It is often read in the media that AI and Robotics are the primary cause of tech-nology unemployment. Several studies have recently appeared focusing on the future of automation in the next 5‒10 years, a future in which robots and computers are capable of doing many jobs that are currently done by humans. To this purpose, it is worth distinguishing between tasks and jobs (McKendrick, 2018). Automation will occur on a task-by-task basis, rather than completely replacing a job. AI and machine learning techniques are expected to take over lower-level tasks, while humans can spend more time with higher-level tasks. Hence, jobs such as concierges, credit authorisers, brokerage clerks are at risk, since their tasks will soon be replaced by a computer. On the other hand, jobs such as truck drivers and healthcare workers are safer from automation (Meyer, 2018). These workers must be able to respond to constantly changing conditions, that makes it harder for robots to handle their jobs. For truck drivers, regulations still require one person on board even if they are not driving. And in healthcare, robots will help workers do their jobs more efficiently, but will not replace them. In perspective, it can be said that jobs requiring boring cogni-tive tasks or repeatable and dangerous physical tasks will be considerably shredded by automation thanks to the wide adoption of AI & Robotics technology to replace humans, while jobs requiring challenging cognitive tasks or unstructured physical tasks will be suitably re-engineered with the progressive introduction of AI & Robotics technology to assist humans.
Robots and humansThe physical action of a robot is inherently to be found in its capability to manipu-late objects. Robotic manipulation has drastically improved during the last decades; thanks to the increase of powerful technology in both sensing and actuation, it has become possible to manipulate different kinds of objects in a fast way. Nevertheless, the sought human dexterity is still out of reach for robots.
4948 ThinkDesign and Technologies
Within industrial applications, where simplicity and cost are most relevant, grippers or special-purpose devices are widely used, and manipulation tasks are typically prehensile. Nevertheless, the necessity for robots working in anthropic environments is growing rapidly, as shown by the eSRA – European Strategic Research Agenda,[1] which states that robots will pervade a portion of the market in domestic appliances, assisted living, entertainment, and education. Therefore, robots should not need specific tools for each action, but they should exploit multipurpose devices, such as multifingered hands, and they should rely on the dexterity conferred by the designed control algorithms. Manipulation dexterity is one of the main research challenges currently being addressed by the robotics community.A nonprehensile manipulation task is a dexterous task par excellence. Some tasks are intrinsically prehensile, e.g., screwing on or unscrewing a bottle cap. Other tasks can be tackled both in a prehensile or a nonprehensile manner, such as moving an object on a table. Some tasks are inherently nonprehensile, e.g., carrying a glass full of water on a plate. Other tasks are hybrid, in the sense that, to reach the goal, both prehensile and nonprehensile actions are required, such as when a juggler has to repetitively catch and throw balls in a cascade juggling pattern.To bridge the gap between robotic and human task execution capability, in the recent research project RoDyMan[2] a service robot was designed to manipulate elastic, soft objects, and both rigid and nonrigid objects in a nonprehensile way. It is a humanoid robot mounted on an omnidirectional mobile platform, which is composed by two arms, a torso, and a pan-tilt head. To provide enhanced dexterous manipulation skills, two anthropomorphic five-finger hands can be mounted at the end-effector tip of the two arms. Eventually, the hands can be replaced with suitable printed tools for those tasks requiring nontrivial weights in action. From the perception point of view, the platform is equipped with two laser scanners in the base for odometry operation. Two force sensors can be mounted on the wrist to measure the interaction forces between the end effector and the environment. Finally, the head is equipped with a stereo camera system, a red-green-blue depth (RGB-D) sensor, and a time-of-flight camera to obtain precise depth estimation.The demonstrator of the project was an autonomous pizza maker since preparing a pizza involves an extraordinary level of manual dexterity. The RoDyMan platform successfully achieved a bimanual nonprehensile manipulation task through sliding by handling a peel to rotate the pizza placed on it. Tossing and catching a deformable object, like pizza dough, is a procedure that is frequently dexterously performed by human pizza chefs. Furthermore, the pizza chef ’s activities can be observed to learn and transfer human-body motion to a robotic system with a low-cost motion-capture system, e.g. a biokinetic sensor suite.A natural question that may arise is why the pizza-making procedure was used as an example. Is there a need to have a robot make pizza? In truth, the pizza-making process is only a convenient media expedient with scientific purpose.[3] It is clear that, if a robot is able to manipulate pizza dough, it might be able to perform similar
difficult manipulation tasks. In 1997, the RoboCup began; the intent certainly was not to replace real soccer players, but rather to advance the state of the art while facing both gaming and difficult problems for robots. With the same aim, RoDyMan tried to mimic the artistic ability of a pizza chef; handling the dough requires excellent tactile sensitivity, and if RoDyMan can learn that, then there is a lot more it could do, for example performing surgical operations, assisting the elderly, or even conducting an orchestra as in the recent stunning performance at Ravello Festival.[4] And there is another reason to choose pizza: in RoDyMan’s project, there is not only Silicon Valley’s “fast, clean and possibly fully automated” approach, but tradition as well. Cultural heritage plays a role in robotics, and vice versa; the recent inclusion of the Neapolitan art of pizza making in Unesco's list of “intangible heritage” has reinforced this concept for the RoDyMan demonstrator.The advancements achieved with the RoDyMan project are in line with a general trend of forefront research in robotics; namely, that of making robots customizable machines which could be intuitively operated even by unexperienced users according to a plug-and-play paradigm. Thanks to the availability of this technology, a future is foreseeable in which industrial production will paradoxically return to craftsman-ship, and even a sensible super-craftsmanship. Machines with tactile sensitivity are expected to revolutionise not only the production, but to invalidate all the theoretical/methodological paradigms typical of industrial design. The new generation of robots will actively cooperate with humans; besides dexterity, as needed by effective manipulation, key skills appear to be safety, dependability and aesthetics, as needed by effective human‒machine interaction.Safety is of fundamental importance so that a robot will have the capacity to react and learn with respect to the stimuli coming from the environment with which it interacts. The first and obvious concern when dealing with robot safety is the possible harm due to an unwanted collision between a human and a robot. Even if harm is usually defined as a physical injury or damage to the health of people, or damage to property or the environment – the property includes the robot itself – most work done on harm induced by robots are biomechanical analyses of human-robot contact inducing impact, crushing, cutting, etc. Dependability is defined as the ability to carry out a task that can justifiably be trusted. It encompasses many attributes, such as reliability or availability. To avoid failures that are more frequent and more severe than acceptable, dependability proposes four means: fault prevention, fault removal, fault forecasting and fault tolerance.Regarding aesthetics, a robot’s appearance and its way of interacting with humans is of fundamental importance. Until a few years ago there was a clear asymmetry between the typically excellent performance of industrial robots and their ugly and disharmonious bodies, with crude ways and potentially very dangerous movements for the human environment. Now that the robots are starting to be part of our lives, they ought to be aesthetically appreciable. A robot designed in collaboration with artists, designers and architects can be as harmonious and beautiful as a complex
5150 ThinkDesign and Technologies
biological machine –with an electron microscope even a gnat presents an extraor-dinary symmetry and beauty– and it can be as harmonious and beautiful as a work of plastic art, which in turn can be as harmonious and beautiful as the nature that inspired it, if not more. However, since it remains a rather complex machine, its aesthetic qualities will depend on the whole team of designers, not just on the skill of a single designer. This is also an important challenge, since it is clear that a robot that is destined to share the environment with human beings must be aesthetically appreciable, besides being safe and dependable. This means that its forms must follow the basic aesthetic criteria that underlie civil coexistence and human existence itself: symmetry, harmony, beauty. In this scenario, it should be clear how design plays a key role for robot technology to become a part of our everyday life and change it essentially in a responsible and beneficial manner (Kries, 2017). It is designers who shape the interface between humans and machines and, as such, they will contribute to make robots as ubiquitous as computers and smartphones. Will human-friendly robots become commonplace, as so often imagined by science fiction? Only time will tell.
[1] euRobotics Coordination Action (2010). Strategic research agenda for robotics in Europe 2014-2020. SPARC: The Partnership for Robotics in Europe. Retrieved from https://www.eu-robotics.net/cms/upload/topic_groups/ SRA2020_SPARC.pdf [2] Project RoDyMan (2013). Retrieved from http://www.rodyman.eu [3] Project RoDyMan (2018). Pizza Making Robot. Retrieved from https://mashable.com/2018/01/05/pizza-making-robot-being-taught-by-one-of-the-masters-robotic-pizzaiolo-napoli [4] Project RoDyMan (2019). Estratto da https://video.repubblica.it/edizione/napoli/il-robot-che-dirige-l-or-chestra-a-ravello-in-azione/340303/340888
References
> Dorit, R.L. Walker, W.F., & Barnes, R.D. (1991). Zoology. Philadelphia: Saunders College Publishing. > Khatib, O. (2000). Robots - A 50 Year Journey. Retrieved from https://vimeo.com/137042620 > Kries, M. (2017). Hello, Robot: Design between Human and Machine. Vitra: Vitra Design Museum. > Maurette, P. (2018). The Children of Anaxagoras. Did hands make us human? Retrieved from https://www. laphamsquarterly.org/roundtable/children-anaxagoras > McKendrick, J. (2018). Artificial Intelligence Will Replace Tasks, Not Jobs. Retrieved from https://www.forbes.com/sites/joemckendrick/2018/08/14/artificial-intelligence-will-replace-tasks-not-jobs> Meyer, D. (2018). Robots May Steal As Many As 800 Million Jobs in the Next 13 Years.
> Moravec, H. (1988). Mind Children. Cambridge (Mass.), USA: Harvard University Press > Sennett, R. (2009). The Craftsman. London: Yale University Press > Siciliano B., Khatib, O., & Kröger, T. (2016). The Journey Continues. Retrieved from https://vimeo.com/173394878 > Siciliano, B., & Khatib, O. (2016a). Handbook of Robotics (2. ed.). s.n. Retrieved from http://www.springer.com/ us/book/9783319325507 > Siciliano, B., & Khatib, O. (2016b). Handbook of Robotics. Retrieved from http://handbookofrobotics.orgfortune.com/2017/11/29/robots-automation-replace-jobs-mckinsey-report-800-million
53Thinkdiid n.67/2019
Think
Andrea Vian
Italy's hypertrophic bureaucratisation costs the country every year more than corruption. Citizens' confidence in the institutions is at an all-time low and waves of populism jeopardize the stability of democracy throughout the continent.The very legitimacy of the state has always depended on its ability to provide services in areas of market failure. That is, the state's ability to make all citizens equal in terms of rights and opportunities, regardless of their age, census, state of health or distance from central government.But while states and jurisprudence around the world were confronted with the very new implications of an emerging global network, the computer revolution has rede-fined the very concepts of distance and enjoyment, trade and frontier, citizenship and democracy, authorship and intellectual property, privacy and sharing, identity and belonging, culture and leisure.Digital technologies have literally transformed the world we live in. Miniaturiza-tion, nanotechnology, computing, networking and artificial intelligence have grown on the free market and have transformed it, extending it beyond the physical and political borders of traditional states. Indispensable services as advanced training courses and hospital examinations, once provided by central states, have now become products that can be freely purchased on the internet or in supermarkets. Other state services have instead been replaced – at least partially – by equivalent or surrogates services, inexorably being absorbed into supranational companies. In this, a key role has been played not only by digital technologies, but by their direct consequences on society too: the redistribution of income and leisure, the exponen-tial growth of travel opportunities, the radical transformation of consumer habits, the interdependence among generations, the decrease in individual and collective spending capacity and finally job temporariness and the erosion of workers' rights.
Digital innovation, governance and public servicesDigital innovating services to citizens are the greatest opportunity to improve the quality of life of millions of people, to rebalance the ongoing transformation and to strengthen society, considering the acceleration of future transformations.We need to rethink how we innovate the processes that support PA services, placing user-centred design at the heart of the transformation.PA services will increasingly take place in the hands of citizens, directly at the touch-point. This transformation, initiated by the spread of mobile internet access, offers the opportunity to redesign public administration’s web services and the way public administration’s web is currently built itself.The web is, in fact, the most pervasive and liquid touchpoint frontier that public admin-istrations, complex entities, large companies and organizations provide their users.At the same time, it is also the product of the inseparable productive man-machine collaboration.In this sense, the role of machines seems to be predominant: the web is manufactured, distributed and enjoyed through the use of machines.
In this age transformed by technology, information has grown expo-nentially in quantity and complexity. Yet, the Web that conveys it is still largely designed and built by humans, as generating information requires capabilities that machines still lack, decades of handmade content creation have set tools and habits, and as the digital essence of the medium is only a shell and vehicle for contents, which remain essentially analog. In the case of complex entities, content design led this way ends up expressing the internal organization of processes, instead of satisfying users' needs. To adopt a user-cen-tered approach, then, seems the only sensible solution, but it usually clashes with the size, complexity and chronic lack of resources of large public organizations. Nowadays, it is finally possible to take advantage of the available technology to radically redefine the way content design is carried out. Textual content describing services can be analysed and split into reusable text blocks. Blocks can then be interlinked, duplicated, redistributed to form descriptions of user-relevant case histories. In this way, we move from simple texts to structured content. The process of content structuring is precisely what adds value to it. In this way, user-centric design rises to system level and becomes the only possible way to create content, not only for webpages, but for every new type of future interaction. The business processes organisation is therefore decoupled from service presentation are processes and rebuild around user needs.
User centered design and digital innovation
[ user centered design, digital innovation, web, artificial intelligence ]
Researcher, University of Genova
5554 ThinkDesign and Technologies
However, despite the role played by machines, the web is still largely manufactured by humans, largely through quasi-analogical processes, although these are carried out through digital tools. Despite its digital pedigree, the web is still largely handmade. Web pages of those complex entities that display information generated in house and that describe their services to their users are indubitably handmade. But if large companies in the digital economy have adopted a design-driven approach to their sites and services, especially user-centered design, the same cannot be said of Italian public administrations, which are still a long way from digitizing their processes.Italian Public Administrations lack behind as they have no digital culture by tradition, no profits to reinvest by definition and they are reluctant to innovation by perversion.So, seizing only a glimmer of the stimuli and opportunities of the ongoing transfor-mation, they have tried to digitize their processes by computerizing just some parts of them. The paper form has become a pdf, the pdf has been uploaded on a web page, from where it can be downloaded. In some lucky cases, the PA has also made itself available to receive that very form by e-mail.But the process in its essence remains unchanged and inefficient. And digital tools have been adopted in a ephemeral way. Usually, the end user ends up printing the pdf on paper, and then filling it in with a pen. Then he still has to deliver it in person to a physical counter, of course during public opening hours only.This incomplete and episodic digitization clearly shows, even to non-experts, the grotesque irony of the incompleteness of the transition.As one could extend the reasoning to all stages of any PA process, it would not change the result: if the exact equivalent of an analogic process is translated into its digital version, a certain efficiency cannot be outperformed and the process as a whole loses meaning.Namely, it is not possible to progressively digitize an analogic process without rede-signing it from scratch. And it makes no sense to design a process from scratch if not around users’ needs.The very concept of process digitization requires to recreate it entirely, funded on digital technologies. But the process must be also redesigned within the whole system of relationship with users. Introducing files, computers, and networks into random locations of analog processes is a short-sighted approach, which soon turns out to be counterproductive.The approach is counterproductive primarily on the PA side, because it reinforces the belief that the digital transition has been accomplished. This belief is already all too widespread among those public workers without design skills; strengthening it implies increasing resistance to change. This hostility is already very strong in the Italian PA, which by law and tradition can change little in each of its sectors, even less so its employees.But episodic process digitization itself is counterproductive on the user’s side, because it generates aversion. Italian PA users are, in fact, resigned and hostile to the contin-uous arising of bad digital tools, often preferred as unmerciful norm executors: the
error is not foreseen, there is no room for interpretation nor for the unexpected. The result is a digital process that is even worse than its analogic counterpart.Users have finally resigned themselves to identifying tools with obligations. And they strongly reject both. This happens because inefficient digital tools, that are not pleasant to use and do not add meaning and value to daily activities, seem to be designed to serve an invisible and capricious master, who continues to invent new ways to waste his servants’ time and energy.
User centered digital innovationA digital innovation project completely geared towards meeting users' needs, that minimises obligations, provides added value and is based on a culturally deeper and more advanced vision of well-being, is bound to spread out and find growing consensus.However, launching a project of such radical digital innovation is difficult and opposed.Moreover, user-centered design – or activity-centered design – is able to trigger and drive a digital innovation project, but is subject to the development timescales described in the Nielsen UX maturity scale. This describes the maturation process that, through eight stages, leads organiza-tions from a first stage of total hostility to user experience to the final stage, in wich organizations become completely focused on providing the best possible user experi-ence. In Nielsen's decades long experience, it took those successful few organization around twenty years to progress from the seventh stage to the eighth. Twenty years are necessary to climb from the second stage to the seventh too. Finally, the first stage is an exception, where an organization can remain trapped indefinitely. Without an external cause acting as a spark, the maturation process does not start at all.Once the maturation has begun, it takes decades for a complex entity such as a PA to reach a good level of UX maturity and put its users’ needs at the center of its organization.But in the meanwhile, the world runs at exponential speed. Digital tools has already widespread efficiency. No rewriting, inconsistencies nor contradictions. It is possible to create systems that structure and relate data automatically. Typically, in the Italian PA the exact opposite happens: each user must first of all search, structure and correlate. And all this work is lost every single time it is done. Process efficiency is possible and now indispensable. But it is a small benefit, if compared to the advantages that full digital innovation will guarantee in the coming years. Europe goes in this direction, asks to do so and finances those who embrace these principles: digital by default, inclusiveness and accessibility, once only, reli-ability and security, openness and transparency, interoperability by default. The similarity with Dieter Rams’s ten principles of good design is clearly not coincidental.We are facing the age of artificial intelligence-assisted decisions, big data from which to extract meaning and knowledge, ubiquitous computing power and network so fast
5756 ThinkDesign and Technologies
that distances are nullified. In the blink of an eye, Italian PA users will find themselves equidistant from the best service providers. Public administration’s digital services must be designed around their needs, by organizations that keep their experience at the center.
Structure and complexity designThe fundamental question is: can design merge with new technologies and define a more efficient and faster to propagate innovation paradigm? In other words: is there a way to bring user-centered design to the system level, and make it the norm? Nowadays, user-centric design is entirely based on designers’ culture and goodwill and on governance’s sensitivity. However, it is precisely through hybridization with web-based technologies that user-centered design can become a tool for digital innovation.The textual contents of each page are indeed aggregated by the editor to form a unitary body and are still subject to the arbitrariness of communication choices, rather than designed around users’ needs.Technology available today, on the other hand, makes it possible to carry out a semantic analysis of texts, even if conceived as unitary bodies, and divide them into groups of logical blocks, which become micro sections of text.In this way it is possible to pass from simple texts, to semantic structured data. This makes it possible to provide text a much higher value, based on meaning instead of words.Of course, this is a significantly more complex task than the typical task of writing a text, and requires a content designer with new skills. These skills can be conceptually divided into two groups: logical-semantic skills and operational skills. The logical-semantic skills allow to extrapolate the global sense of the page, to understand the meaning of each micro-section and to derive the relationship between the parts. The operative skills allow the content designer to save the logical-semantic activity in the system structure.The comparison between the two sets of skills highlights the first design principle behind a structured text content system: moving computational complexity upstream. In fact, the content designer is called to perform a more complex activity than the typical editorial activity. But he has to do it only once, and this is not so different from the interpretative activity that each user carries out every time he or she uses the information. With the conspicuous difference that each user's activity is systemati-cally repeated and remains confined in his or her mind, with no possibility of reuse. Instead, when the logical-semantic activity is carried out by the content designer and saved in the system, it forms a flexible and reusable information structure. And it makes it possible to structure the information around users' needs and thus consti-tutes the technological codification of the user-centered design approach.Consider for example a regulation: a complex text structured in parts, involving a large number of cases through the combination of its titles, chapters and sections.
By the standard editorial approach, editor organizes the text according to a logical or chronological order and users read it all, looking for relevant parts. Otherwise, he must jump from section to section, from one reference to the next, in order to extrapolate the relevant information only. As the complexity increases, even without taking into account the interpretability of rules, it soon becomes necessary to appeal to a professional.The structured data approach, on the other hand, requires the content designer to analyse and define all the cases in which a user may fall under the regulation in question.This is the second principle underlying a structured text content system: articulate the information around possible user postures. That is, the future needs of whoever uses the information. In this scenario of decoupling information body from interface, the page could also not be the preferred touchpoint: the information could be enjoyed through natural language interaction with a voice assistant. Or through any future interface technology.In the case of a standard web page, the whole regulation – too complex and articulated to be enjoyed in full – can be hidden. The page can then display a question based interface system, which guides the user in defining his or her case. Once the user's posture is defined, the page shows just the relevant information.This is the third design principle behind a structured text content system: conceal information complexity on users' posture. This is what a human consultant would do. And this process of hybridization of user-centered design with digital technolo-gies makes it possible to incorporate knowledge into an automated system. That is, distilling knowledge from information.This system can be used in any PA or complex entity, for any type of information.Its adoption foresees to process information upstream of its exposure, and to struc-ture it around users’ possible postures. Namely, around their needs. So the user-centered design goes up to the system level, and becomes the only possible approach within those PA that adopt this system.This makes it a very powerful tool for bottom-up innovation, as the very adoption alone leads users without specific user-centered design skills to reason as designers, and to produce results designed around users' needs, postures and activities.
Design, artificial intelligence and societyA structured text content system is an innovative, user-centered design system that innovates the information creation process and redefines the ways, roles and skills involved in creating knowledge. This is the extent of the process innovation that this system makes possible today. However, it is still a fully instrumental system: it provides the human operator with the tools to structure information, and this produces usable knowledge. But the understanding of meaning and the semantic structuring ativity is still entirely human based. The system provides support, not intelligence. The intelligence involved is completely natural.
5958 ThinkDesign and Technologies
So, how will such tools evolve through the spread of artificial intelligence?It is likely that information structuring systems evolve to become information crea-tion and improvement assistance systems. As they evolve, they will complement human capabilities and increase them. Progressively, they could then assume more complex functions, until they carry out autonomous activities that require a deep domain understanding. This would require the prior definition of a reference domain complete and schematic representation, in a data structure that defines all the domain entities and the relationships between them. This type of knowledge representation is called ontology.It is evident that a system of structured text content constitutes an ideal founda-tion for an ontology definition. It is, in fact, delimited by definition to the scope of human activities dealt within the text, and is rigorously structured by the analysis and semantic organization carried out by content designers.Moreover, among the different types of ontologies, it seems that the most promising are the semi-formal ones, which combine formal ontologies rigorous structuring with natural language flexibility.On this front too, a system of structured text content represents an exemplary case, since the object of structuring is text. That is, natural language.So, once defined a reference ontology, the structuring could happen automatically: the content designer describes the text, the system analyzes it with respect to the ontology, generates and verifies all the possible combinations (i.e. the possible users’ postures) and on the basis of this analysis, structures the text in blocks.What is more, such a system would also provide intelligent assistance during the drafting of the regulation. In other words, it would be able to predict all the cases, verify the intersections with other existing regulations and report inconsistencies and possible improvements. In other words, it would anticipate users’ needs and bring them to the very first phase of regulation drafting.By extension, once the reference scope has been defined and structured in ontological form (e.g. privacy legislation, criminal procedure code or the law of navigation), a suitably trained artificial intelligence could autonomously analyze the entire legis-lative body, cross each paragraph, and start an assisted or automatic process of text improvement and inconsistencies resolution.Thus, by building automatic tools around a system of structured text content, we would teach the machine to provide human designers assistance based on users’ needs. At the same time we would lead its evolution towards a semi-autonomous form, to finally base the very existence of completely autonomous systems on human beings’ needs.This would greatly improve the interface between public administration and citizens. And consequently the relationship of trust that cements our society.
References
> Attali, J. (2016). Breve storia del futuro. Roma: Fazi. > Castells, M., & Viviani, S. (2013). Galassia Internet. Milano: Feltrinelli. > Harari, Y.N. (2018). 21 Lezioni per il XXI secolo. Milano: Bompiani. > Nielsen J. (2006). Corporate UX Maturity: Stages 1-4. (2006, 30 april). Nielsen Norman Group. Re-trieved from https://www.nngroup.com/> articles/ ux-maturity-stages-1-4> Nielsen J. (2006). Corporate UX Maturity: Stages 5-8. (2006, 30 april). s.l.: Nielsen Norman Group. Retrieved from https://www.nngroup.com/articles/ ux-maturity-stages-1-4
> Norman, D.A. (2014). La caffettiera del masochista: il design degli oggetti quotidiani. Firenze: Giunti. > Rams, D. (2012). Ten Principles for Good Design, Vitsoe. s.n. Retrieved from http://www.vitsoe.com/en/gb/about/ dieterrams/gooddesign> Shirky, C. (2010). Surplus cognitivo: creatività e gen-erosità nell’era digitale. Torino: Codice. > Sowa, J.F. (2010). The role of logic and ontology. In Language and reasoning (Chapter 11). Theory and Applications of Ontology: Philosophical Perspectives. R. Poli & J. Seibt. > Wesch, M. (2007). Web 2.0... the machine is us/ing us. Retrieved from http://www.youtube.com
Think gallery
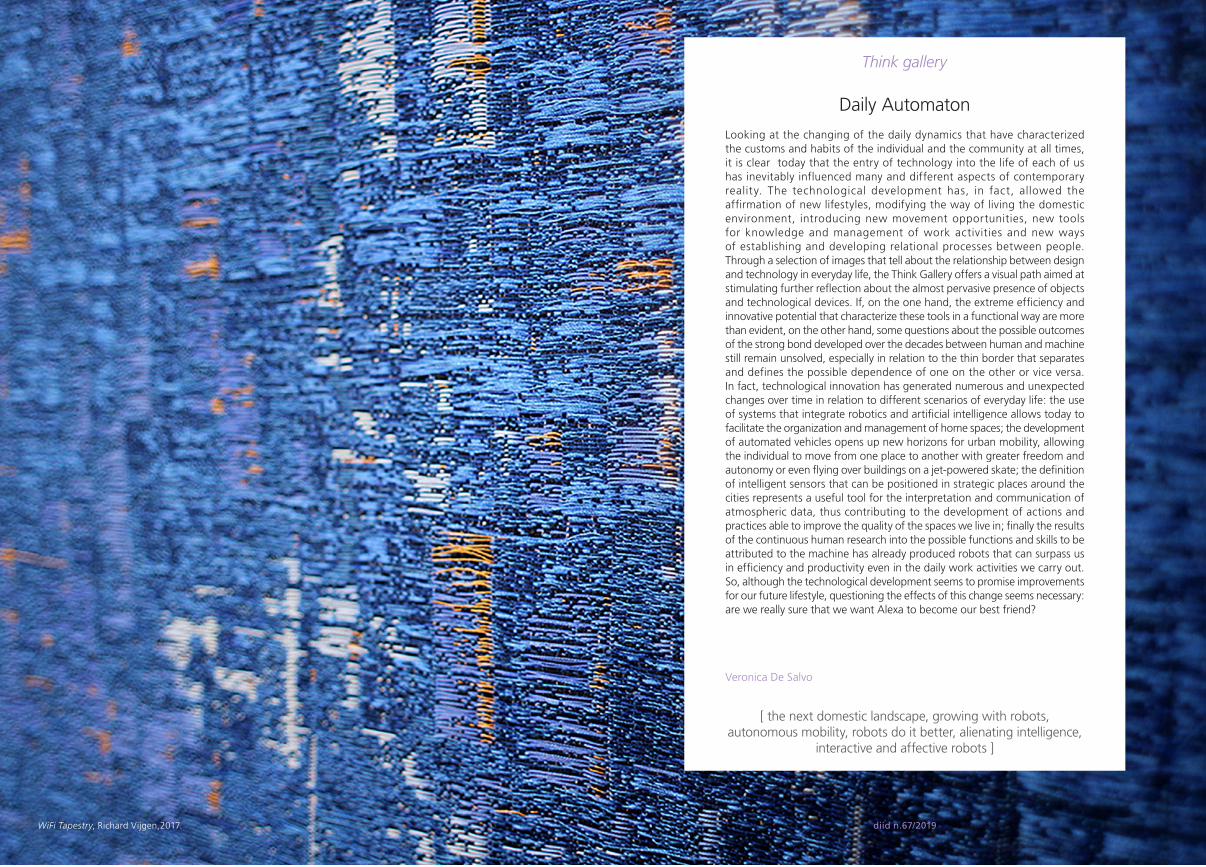
Think gallery
diid n.67/2019
Veronica De Salvo
WiFi Tapestry, Richard Vijgen,2017.
Daily Automaton
[ the next domestic landscape, growing with robots, autonomous mobility, robots do it better, alienating intelligence,
interactive and affective robots ]
Looking at the changing of the daily dynamics that have characterized the customs and habits of the individual and the community at all times, it is clear today that the entry of technology into the life of each of us has inevitably influenced many and different aspects of contemporary reality. The technological development has, in fact, allowed the affirmation of new lifestyles, modifying the way of living the domestic environment, introducing new movement opportunities, new tools for knowledge and management of work activities and new ways of establishing and developing relational processes between people. Through a selection of images that tell about the relationship between design and technology in everyday life, the Think Gallery offers a visual path aimed at stimulating further reflection about the almost pervasive presence of objects and technological devices. If, on the one hand, the extreme efficiency and innovative potential that characterize these tools in a functional way are more than evident, on the other hand, some questions about the possible outcomes of the strong bond developed over the decades between human and machine still remain unsolved, especially in relation to the thin border that separates and defines the possible dependence of one on the other or vice versa. In fact, technological innovation has generated numerous and unexpected changes over time in relation to different scenarios of everyday life: the use of systems that integrate robotics and artificial intelligence allows today to facilitate the organization and management of home spaces; the development of automated vehicles opens up new horizons for urban mobility, allowing the individual to move from one place to another with greater freedom and autonomy or even flying over buildings on a jet-powered skate; the definition of intelligent sensors that can be positioned in strategic places around the cities represents a useful tool for the interpretation and communication of atmospheric data, thus contributing to the development of actions and practices able to improve the quality of the spaces we live in; finally the results of the continuous human research into the possible functions and skills to be attributed to the machine has already produced robots that can surpass us in efficiency and productivity even in the daily work activities we carry out. So, although the technological development seems to promise improvements for our future lifestyle, questioning the effects of this change seems necessary: are we really sure that we want Alexa to become our best friend?
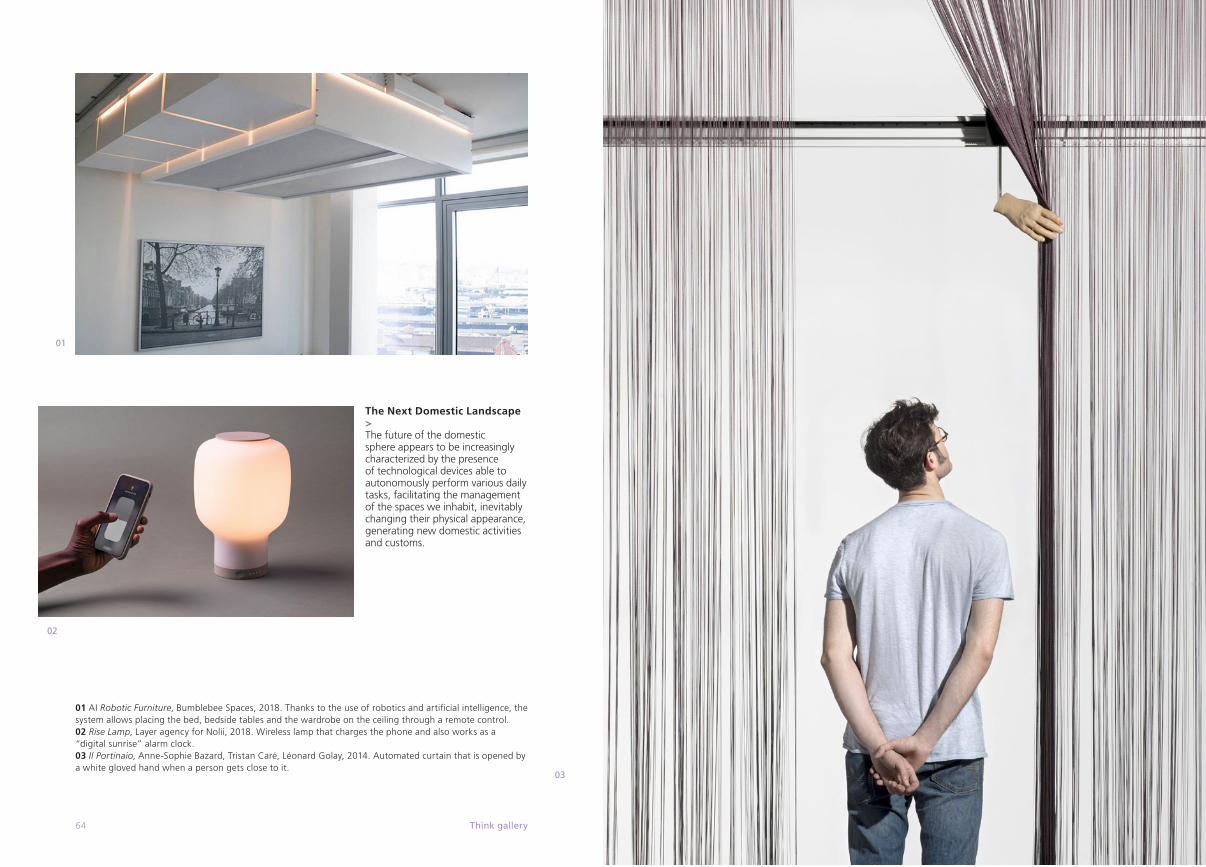
64 Think gallery
03
01
02
01 AI Robotic Furniture, Bumblebee Spaces, 2018. Thanks to the use of robotics and artificial intelligence, the system allows placing the bed, bedside tables and the wardrobe on the ceiling through a remote control. 02 Rise Lamp, Layer agency for Nolii, 2018. Wireless lamp that charges the phone and also works as a “digital sunrise” alarm clock. 03 Il Portinaio, Anne-Sophie Bazard, Tristan Caré, Léonard Golay, 2014. Automated curtain that is opened by a white gloved hand when a person gets close to it.
The Next Domestic Landscape > The future of the domestic sphere appears to be increasingly characterized by the presence of technological devices able to autonomously perform various daily tasks, facilitating the management of the spaces we inhabit, inevitably changing their physical appearance, generating new domestic activities and customs.
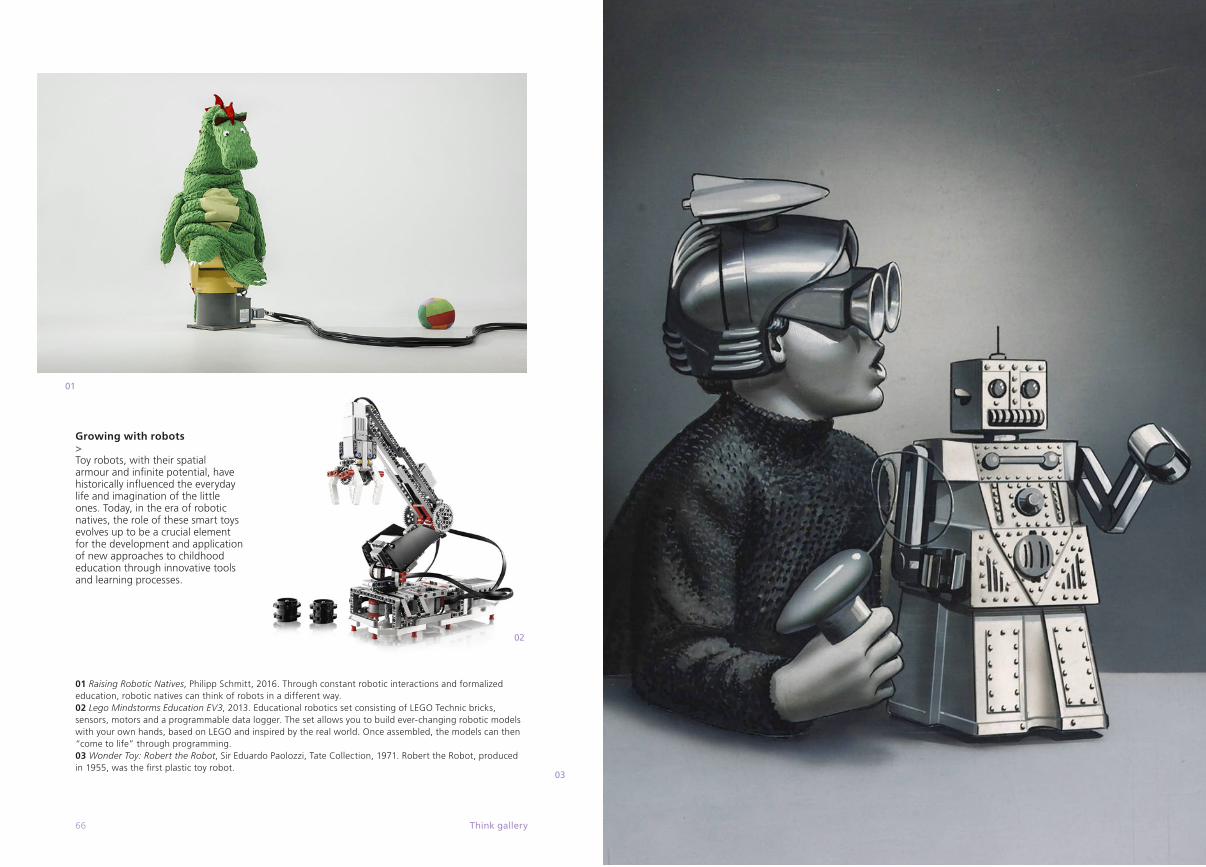
66
01
02
03
Think gallery
01 Raising Robotic Natives, Philipp Schmitt, 2016. Through constant robotic interactions and formalized education, robotic natives can think of robots in a different way.02 Lego Mindstorms Education EV3, 2013. Educational robotics set consisting of LEGO Technic bricks, sensors, motors and a programmable data logger. The set allows you to build ever-changing robotic models with your own hands, based on LEGO and inspired by the real world. Once assembled, the models can then “come to life” through programming. 03 Wonder Toy: Robert the Robot, Sir Eduardo Paolozzi, Tate Collection, 1971. Robert the Robot, produced in 1955, was the first plastic toy robot.
Growing with robots> Toy robots, with their spatial armour and infinite potential, have historically influenced the everyday life and imagination of the little ones. Today, in the era of robotic natives, the role of these smart toys evolves up to be a crucial element for the development and application of new approaches to childhood education through innovative tools and learning processes.
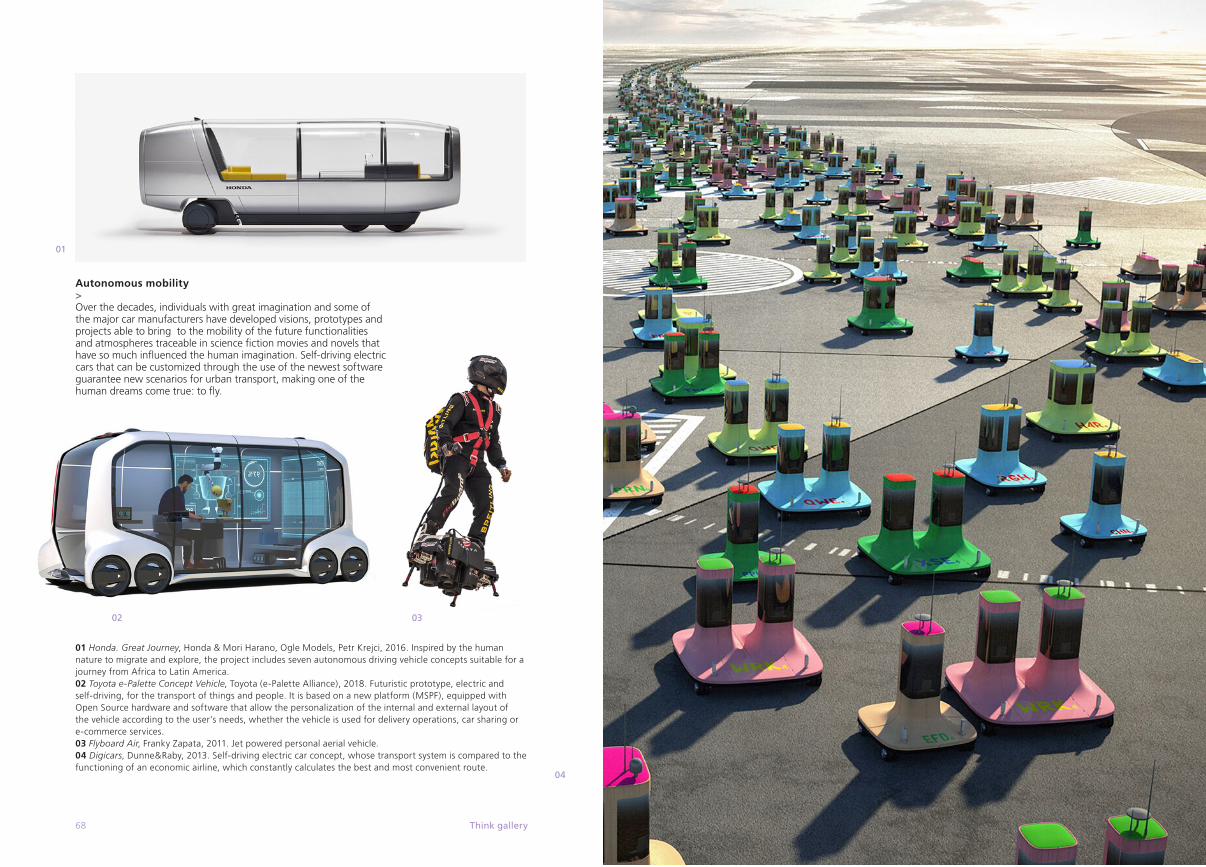
68
01
02 03
04
Think gallery
Autonomous mobility > Over the decades, individuals with great imagination and some of the major car manufacturers have developed visions, prototypes and projects able to bring to the mobility of the future functionalities and atmospheres traceable in science fiction movies and novels that have so much influenced the human imagination. Self-driving electric cars that can be customized through the use of the newest software guarantee new scenarios for urban transport, making one of the human dreams come true: to fly.
01 Honda. Great Journey, Honda & Mori Harano, Ogle Models, Petr Krejci, 2016. Inspired by the human nature to migrate and explore, the project includes seven autonomous driving vehicle concepts suitable for a journey from Africa to Latin America.02 Toyota e-Palette Concept Vehicle, Toyota (e-Palette Alliance), 2018. Futuristic prototype, electric and self-driving, for the transport of things and people. It is based on a new platform (MSPF), equipped with Open Source hardware and software that allow the personalization of the internal and external layout of the vehicle according to the user’s needs, whether the vehicle is used for delivery operations, car sharing or e-commerce services.03 Flyboard Air, Franky Zapata, 2011. Jet powered personal aerial vehicle.04 Digicars, Dunne&Raby, 2013. Self-driving electric car concept, whose transport system is compared to the functioning of an economic airline, which constantly calculates the best and most convenient route.
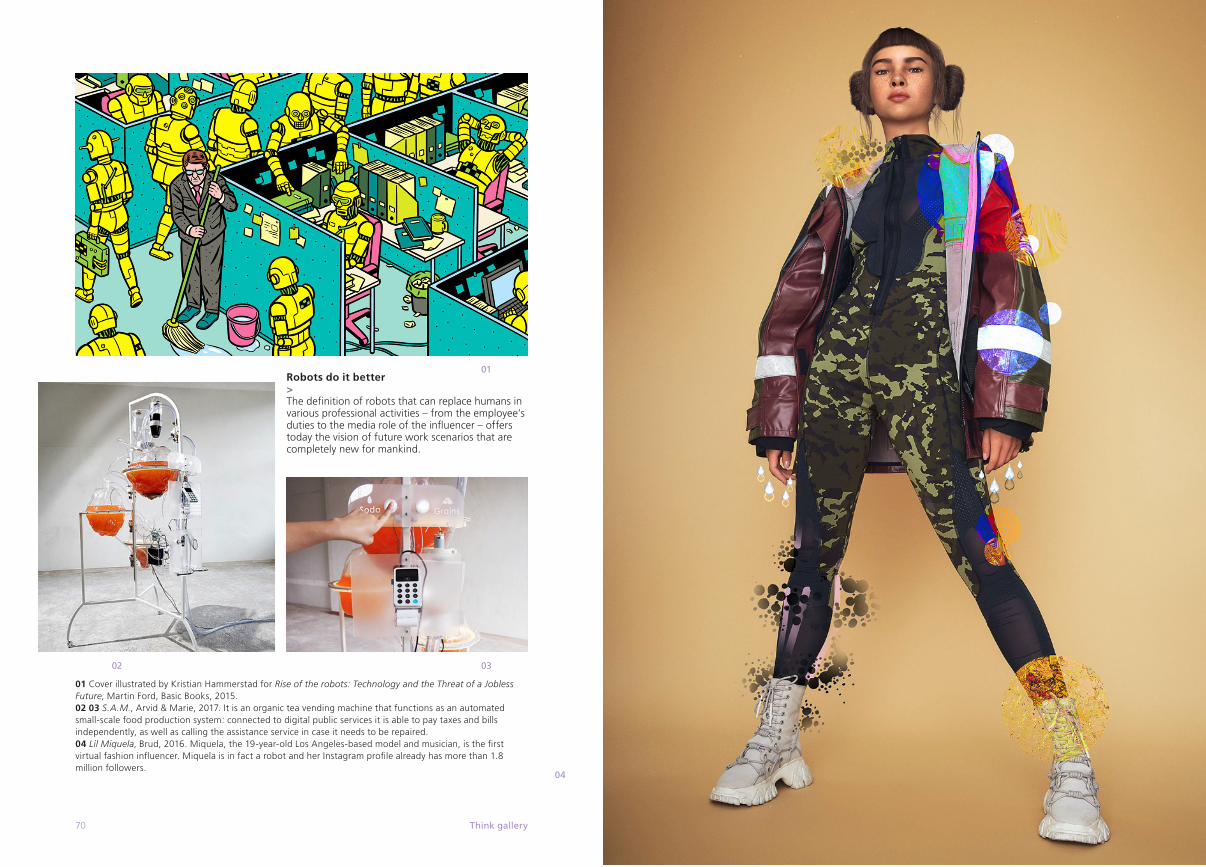
70
01
02 03
Think gallery
04
01 Cover illustrated by Kristian Hammerstad for Rise of the robots: Technology and the Threat of a Jobless Future, Martin Ford, Basic Books, 2015.02 03 S.A.M., Arvid & Marie, 2017. It is an organic tea vending machine that functions as an automated small-scale food production system: connected to digital public services it is able to pay taxes and bills independently, as well as calling the assistance service in case it needs to be repaired.04 Lil Miquela, Brud, 2016. Miquela, the 19-year-old Los Angeles-based model and musician, is the first virtual fashion influencer. Miquela is in fact a robot and her Instagram profile already has more than 1.8 million followers.
Robots do it better > The definition of robots that can replace humans in various professional activities – from the employee’s duties to the media role of the influencer – offers today the vision of future work scenarios that are completely new for mankind.
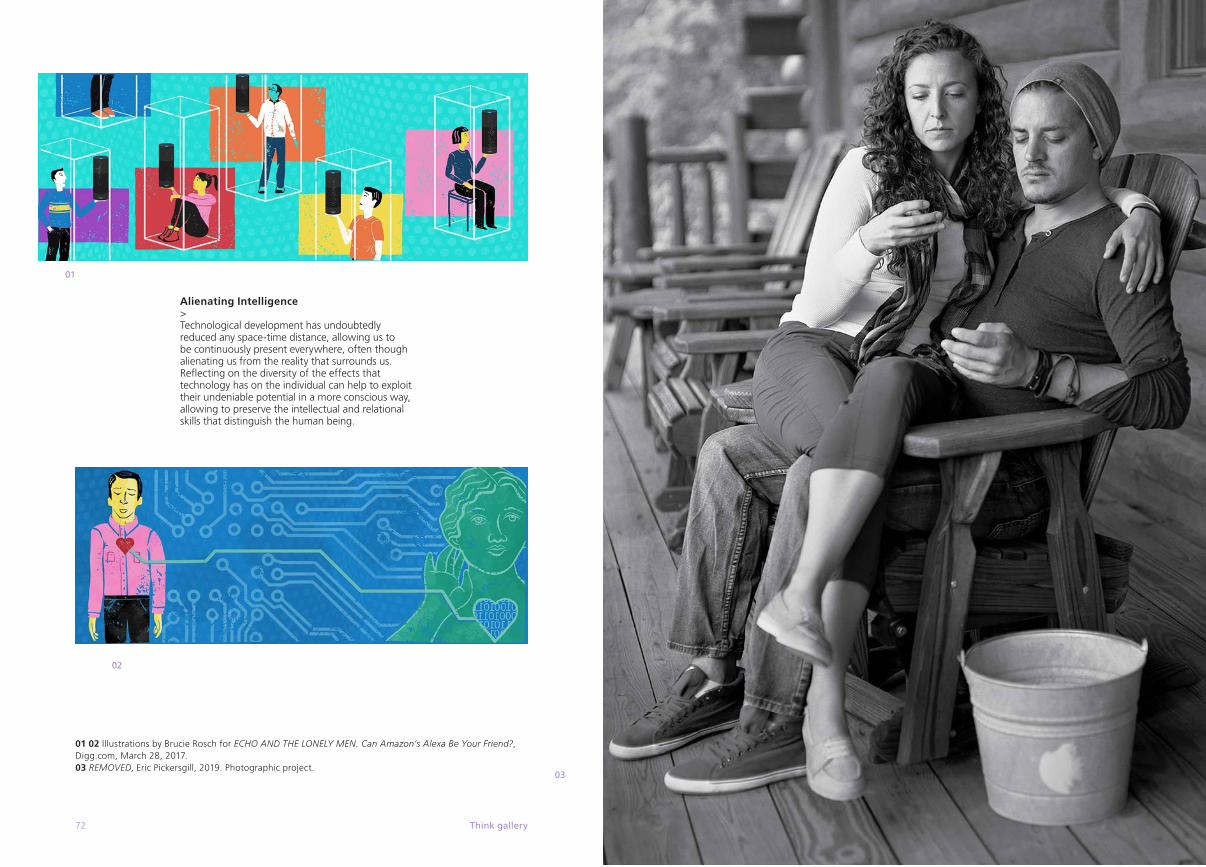
72
01
02
03
Think gallery
Alienating Intelligence > Technological development has undoubtedly reduced any space-time distance, allowing us to be continuously present everywhere, often though alienating us from the reality that surrounds us. Reflecting on the diversity of the effects that technology has on the individual can help to exploit their undeniable potential in a more conscious way, allowing to preserve the intellectual and relational skills that distinguish the human being.
01 02 Illustrations by Brucie Rosch for ECHO AND THE LONELY MEN. Can Amazon’s Alexa Be Your Friend?, Digg.com, March 28, 2017. 03 REMOVED, Eric Pickersgill, 2019. Photographic project.
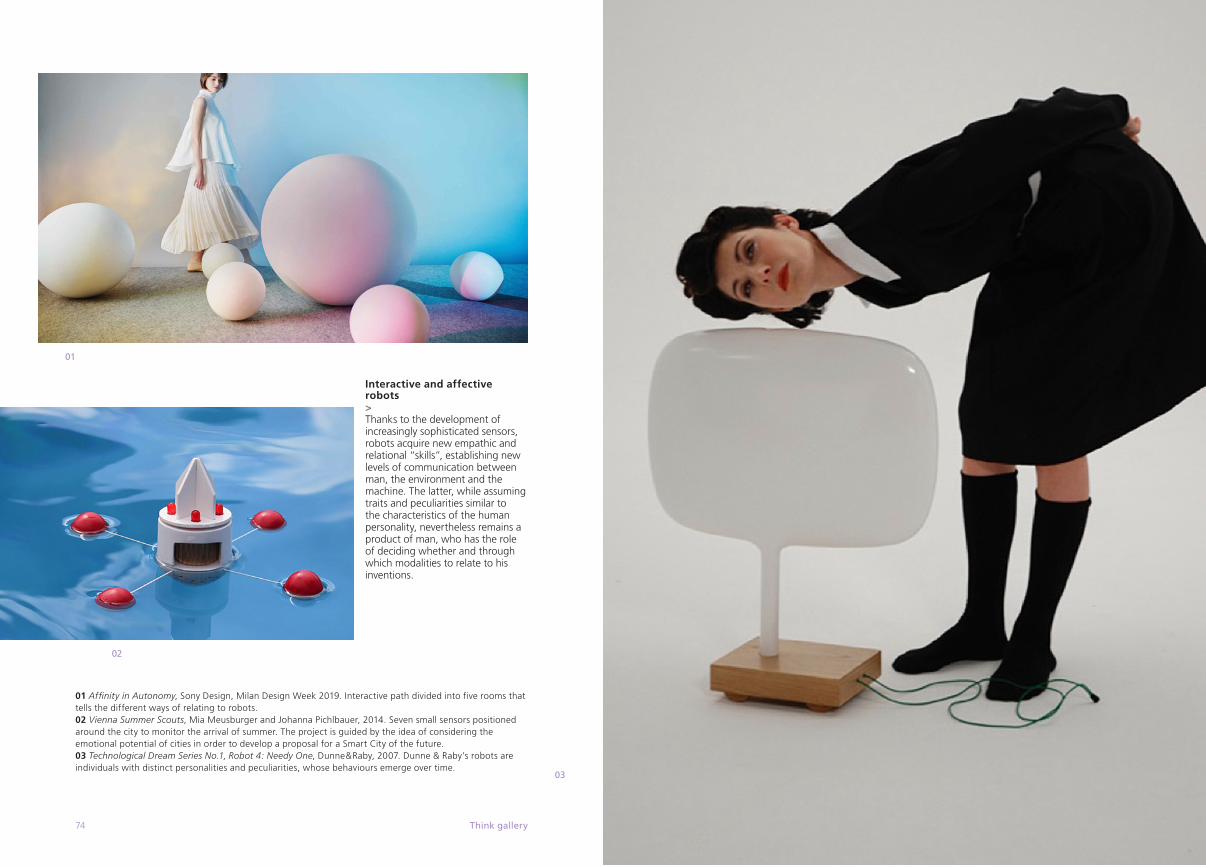
74
01
02
03
Think gallery
Interactive and affective robots > Thanks to the development of increasingly sophisticated sensors, robots acquire new empathic and relational “skills”, establishing new levels of communication between man, the environment and the machine. The latter, while assuming traits and peculiarities similar to the characteristics of the human personality, nevertheless remains a product of man, who has the role of deciding whether and through which modalities to relate to his inventions.
01 Affinity in Autonomy, Sony Design, Milan Design Week 2019. Interactive path divided into five rooms that tells the different ways of relating to robots.02 Vienna Summer Scouts, Mia Meusburger and Johanna Pichlbauer, 2014. Seven small sensors positioned around the city to monitor the arrival of summer. The project is guided by the idea of considering the emotional potential of cities in order to develop a proposal for a Smart City of the future.03 Technological Dream Series No.1, Robot 4: Needy One, Dunne&Raby, 2007. Dunne & Raby’s robots are individuals with distinct personalities and peculiarities, whose behaviours emerge over time.
Make
Make gallery > p.110/p.125
Niccolò Casiddu, Emanuele Micheli, Claudia Porfirione, Francesco Burlando
Mauro Ceconello, Martina Sciannamè, Davide Spallazzo
Claudio Germak, Lorenza Abbate
Gianmarco Paduano, Sara Nappa
Humanoid Robotics Design for active ageing
Design and AI: prospects for dialogue
RoboEthics: form follows service
Of robots, wood, ropes and martian sand
79Makediid n.67/2019
Make
Niccolò Casiddu, Emanuele Micheli, Claudia Porfirione, Francesco Burlando
> [email protected] [email protected] [email protected] [email protected]
In the years, the evolution of the design practise went along with the greatest social, cultural and economic challenges. The European Union estimates that a significant growth of the population of senior citizens will be observed in the coming years. Such increase will rise social costs for the active popula-tion, which will decrease in the meanwhile. Is a priority to relieve the burden which weighs heavily on the health system by developing design project strategies and innovative tools for active ageing. In this way, the senior population could become a resource rather than a matter of concern. Physical activity represents a decisive prevention stra-tegy against physical aging and cognitive decline.Robotic technology represents one of the more efficient tools to take on such task, as it facilitates the replicability of human-cen-tered trials aimed to improve psycho-physical health. Humanoid robots have shown to be excellent to achieve such purposes, thanks to a high level of engagement from vulnerable users.“WearaBot” is a system developed by a multidisciplinary team of engineers, designers and doctors, aiming to increase the potential of humanoid robots by enabling interaction with a wearable device. Such robotic system is being tested in a pilot study for the prevention of sarcopenia carried out by using facilities at the E.O. Ospedali Galliera of Genoa.Such pilot study in the field of human robot interaction (HRI) aims to explore innovative methods to connect technology and the human body and to integrate humanoid robots with wearable technology. This research proposes some desi-gn-driven scenarios, suggesting ways to facilitate active ageing thanks to replicable technologic trials led in healthcare facilities and at home.
Humanoid Robotics Design for active ageing
[ UX design, interfaces design, active ageing, preventing sarcopenia, humanoid robotics ]
Full Professor, University of GenovaRobotic engineer, University of GenovaTemporary Research Fellow, University of GenovaPhD Student, University of Genova
Technology and design for active ageingEuropean Union (EU) estimates that the population of senior citizens will increase significantly over the coming years. From being about 25% of total population in 2010, to becoming 29.6% in 2016 and is projected to rise even further, in particular up to 2050, and eventually reach 51.2% in 2070 (European Commission, 2017). Such growth is, in proportion, higher compared to data collected over the past years. Moreover, a growth of social costs for formal and informal caregiving is expected with the increase of the percentage of senior citizens (Fast, Williamson & Keating, 1999). Nevertheless, we will witness an increase of the dependency ratio.[1] While in 2016 the inactive population was around 43.1%, in 2070 such percentage is expected to raise to 68.5% (European Commission, 2017). Such dynamics require changes in the organization and planning of the provision of socio-medical services for the older adults. First it is needed to design a network covering not only healthcare facilities, such as home care, but also private residences for the elderly. Moreover, it is necessary to increase preventive measures so that the health and the inde-pendency of senior citizens can improve in the future.An efficient preventive measure in favour of active ageing could make the senior popu-lation become a resource rather than a matter of concern. Such forecast poses new challenges to designers. The latter are called to answer, through technological design-driven process, to the need of a strategy of prevention against ageing population. Technology is an efficient tool to address these issues, as it allows to design services adjusted to particular needs and replicable. This approach will lead to a more efficient welfare system.It is known that EU policies encourage the use of ICT in the healthcare system and the high degree of acceptance that they obtain from patients has been widely validated: in particular, humanoid robotics applied to weak users has stood out due to the high level of product engagement (Valentí Soler et al., 2015). Multiple studies have shown that robots can lead to significant results when used for entertainment. In addition, humanoid robots have proven to be particularly successful when employed in the treatment of people with cognitive disorders, both children (e.g. autistic (Giannopulu, Terada & Watanabe, 2018; Damiani, Grimaldi & Palmieri, 2013) and older patients - e.g. Alzheimer (Rodríguez Pérez et al., 2015).
ObjectivesPrimary Clinical Objectives From the medical point of view, the research aims to address the onset of frailty in the older adults. The disorder is due to the loss of physical and psychological abilities that occurs with the aging of the person. The process stems from a loss of muscle tone, mass and strength that usually emerges from the sixtieth year of life. This disease is known as “sarcopenia”. The decrease in muscle capacity can lead, over time, to the onset of other problems, such as obesity, depression, the risk of falls and many others (Cruz-Jentoft et al., 2019).
8180 MakeDesign and Technologies
The incidence of sarcopenia is expected to dramatically increase in the next 30 years (Ethgen, Beaudart et al., 2017). The main clinical objective is to counteract the onset of sarcopenia and delay the process of muscle loss. This practice would help to post-pone the onset of the frailty condition in the older, thus improving their physical and psychological well-being. The study aims to evaluate the effectiveness and the applicability of the treatment of sarcopenic and pre-sarcopenic individuals through a series of sessions of physical activity carried out under the tutorship of a humanoid robot and monitored by a wear-able device. To achieve this goal, it will be necessary to measure the medium and long-term effects of the treatment on the muscular performance of the participants taking part in the trial, and compare the data achieved with the results obtained by the control group.
Primary Designers’ Objectives Humanoid robotics has been successful in interacting with weak users for entertain-ment purposes (Martinez-Martin & del Pobil, 2018). However, the effectiveness of using such technology to support physical activity is yet to be explored.[2]
Studies have shown that humanoid robots are able to increase users’ propensity for imitation (Oberman, McCleery, Ramachandran & Pineda, 2007). Therefore, we will analyze the difference in patients’ reactions to the physical exercises:1. proposed by the human caregiver2. mimed by the robots 3. suggested by the robots through a video on the tablet.Furthermore, although humanoid robots appear to be excellent tools for entertainment, they still have many shortcomings in practical applications. Therefore, a further objective of the research is to develop a system that integrates humanoid robotics and wearable technology. This integration aims to increase the potential of these technologies. This integration aims to increase the potential of these technologies. In this way, new design driven scenarios addressing prevention, treatment and rehabilitation can advance. Finally, the project aims to investigate the acceptability of this approach through a series of questionnaires administered at the beginning and end of the clin-ical trial and at the end of each exercise session.Furthermore, an important objective is to be able to monitor in real-time the activity carried out in order to provide the patient with fast live feedback. It will be then possible to obtain a final report and a keep a record of the activity executed by each patient over time.
MethodsPrevention and treatment of sarcopenia have not received the attention they deserve to date. The only active projects that address this issue are intended to communicate healthy diets and healthy habits. Nevertheless, such preventive measures need to be taken by the elderly patients themselves, who must autonomously manage the planning and execution of the suggested behaviors.
This system does not take into account the fact that the elderly may not perform the exercises correctly or they might not consistently execute the exercises. Furthermore, in this way the improvement or the potential worsening of the individuals’ condition cannot be monitored over timeThe “WearaBot” project involves the use of a marketed humanoid robot, Pepper, and a wearable device, designed for the purpose, as tools for the execution of a series of physical exercises aimed at preventing sarcopenia.
Design of the study40 participants were recruited for the clinical trial, half of whom were randomly assigned to the experimental group and the other half to the control group. The diagnosis of sarcopenia will be performed according to the EWGSOP2 criteria (Cruz-Jentoft et al., 2018). In accordance with the medical team, the following inclusion ed exclusion criteria were selected:
Inclusion criteria: . age ≥ 65 years; . male and female . presence of reduced physical performance detected through the evaluation of MPI,
HAND GRIP, SPPB.
Exclusion criteria: . Severe cognitive impairment (CDR> 3) and / or SPMSQ> = 7/10 . Presence of diseases and polypathological conditions (Hepatic, renal, degenerative
neurological diseases, etc.) that do not allow performing the protocol necessary to conduct the study
. Life expectancy <6 months . Functional limitations of joints that do not allow a correct execution of the exercises . Denial of informed consent to participate in the study
After being recruited, participants were all subjected to a multidimensional geri-atric evaluation via self-administered Multidimensional Prognostic Index (Selfy-MPI), functional tests (Hand Grip and SPPB) and pain detection (Numerical Scale). NRS). To evaluate the clinical and functional characteristics of the subjects, the Quality of Life (SF12) questionnaire has also been administered. It will also be investigated participants’ relationship with technology and their perception of it as users. At the time of the first visit (baseline), subjects were randomly allocated to two groups. They were then trained to perform the exercises during the sessions of physical activity, which lasted 40 minutes and took place twice a week for a total of 12 sessions. At the end of the treatment cycle, post-treatment measurements for each subject were taken, specifically: Selfy_MPI, Hand Grip, SPPB, NRS and SF12. The questionnaire of accepta-bility and satisfaction Client Satisfaction Questionnaire (CSQ-8) was also readministered.
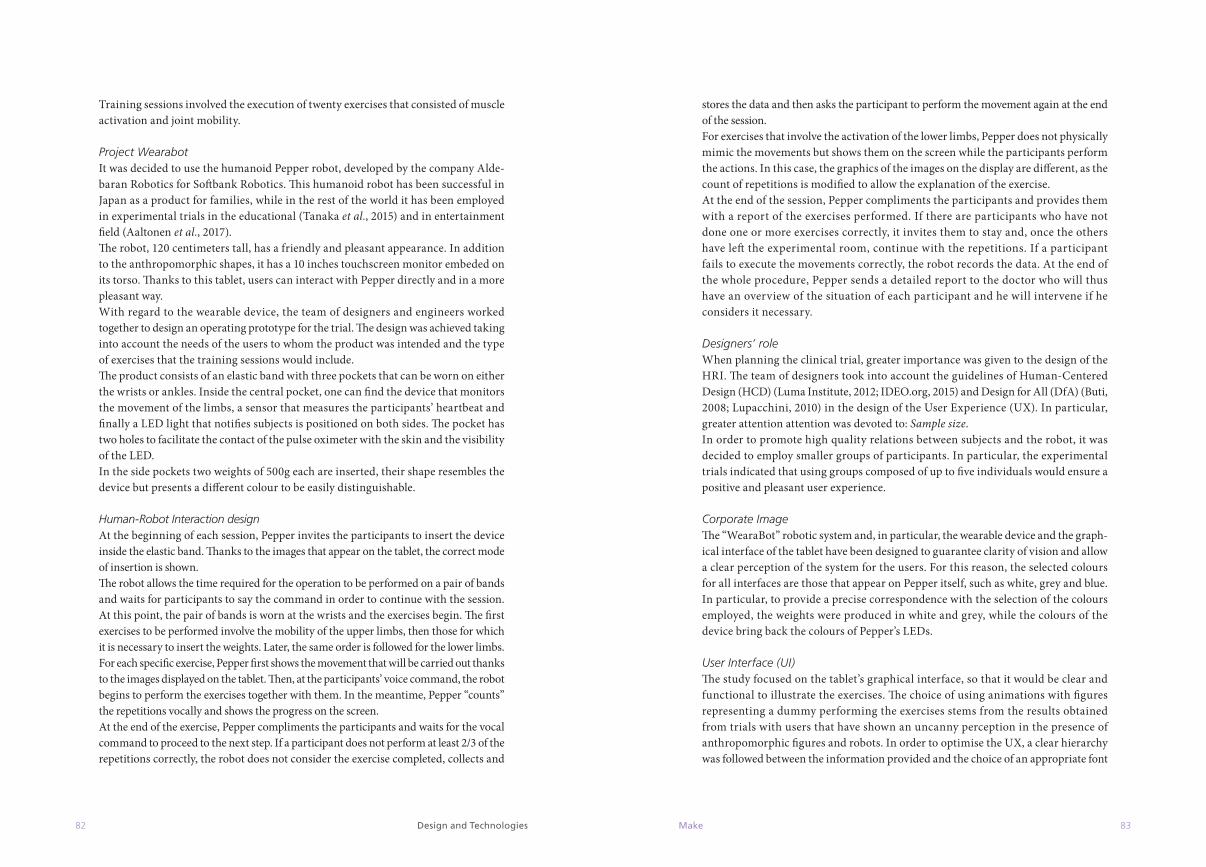
8382 MakeDesign and Technologies
Training sessions involved the execution of twenty exercises that consisted of muscle activation and joint mobility.
Project WearabotIt was decided to use the humanoid Pepper robot, developed by the company Alde-baran Robotics for Softbank Robotics. This humanoid robot has been successful in Japan as a product for families, while in the rest of the world it has been employed in experimental trials in the educational (Tanaka et al., 2015) and in entertainment field (Aaltonen et al., 2017).The robot, 120 centimeters tall, has a friendly and pleasant appearance. In addition to the anthropomorphic shapes, it has a 10 inches touchscreen monitor embeded on its torso. Thanks to this tablet, users can interact with Pepper directly and in a more pleasant way.With regard to the wearable device, the team of designers and engineers worked together to design an operating prototype for the trial. The design was achieved taking into account the needs of the users to whom the product was intended and the type of exercises that the training sessions would include.The product consists of an elastic band with three pockets that can be worn on either the wrists or ankles. Inside the central pocket, one can find the device that monitors the movement of the limbs, a sensor that measures the participants’ heartbeat and finally a LED light that notifies subjects is positioned on both sides. The pocket has two holes to facilitate the contact of the pulse oximeter with the skin and the visibility of the LED.In the side pockets two weights of 500g each are inserted, their shape resembles the device but presents a different colour to be easily distinguishable.
Human-Robot Interaction designAt the beginning of each session, Pepper invites the participants to insert the device inside the elastic band. Thanks to the images that appear on the tablet, the correct mode of insertion is shown. The robot allows the time required for the operation to be performed on a pair of bands and waits for participants to say the command in order to continue with the session. At this point, the pair of bands is worn at the wrists and the exercises begin. The first exercises to be performed involve the mobility of the upper limbs, then those for which it is necessary to insert the weights. Later, the same order is followed for the lower limbs. For each specific exercise, Pepper first shows the movement that will be carried out thanks to the images displayed on the tablet. Then, at the participants’ voice command, the robot begins to perform the exercises together with them. In the meantime, Pepper “counts” the repetitions vocally and shows the progress on the screen.At the end of the exercise, Pepper compliments the participants and waits for the vocal command to proceed to the next step. If a participant does not perform at least 2/3 of the repetitions correctly, the robot does not consider the exercise completed, collects and
stores the data and then asks the participant to perform the movement again at the end of the session.For exercises that involve the activation of the lower limbs, Pepper does not physically mimic the movements but shows them on the screen while the participants perform the actions. In this case, the graphics of the images on the display are different, as the count of repetitions is modified to allow the explanation of the exercise.At the end of the session, Pepper compliments the participants and provides them with a report of the exercises performed. If there are participants who have not done one or more exercises correctly, it invites them to stay and, once the others have left the experimental room, continue with the repetitions. If a participant fails to execute the movements correctly, the robot records the data. At the end of the whole procedure, Pepper sends a detailed report to the doctor who will thus have an overview of the situation of each participant and he will intervene if he considers it necessary.
Designers’ role When planning the clinical trial, greater importance was given to the design of the HRI. The team of designers took into account the guidelines of Human-Centered Design (HCD) (Luma Institute, 2012; IDEO.org, 2015) and Design for All (DfA) (Buti, 2008; Lupacchini, 2010) in the design of the User Experience (UX). In particular, greater attention atten tion was devoted to: Sample size. In order to promote high quality relations between subjects and the robot, it was decided to employ smaller groups of participants. In particular, the experimental trials indicated that using groups composed of up to five individuals would ensure a positive and pleasant user experience.
Corporate ImageThe “WearaBot” robotic system and, in particular, the wearable device and the graph-ical interface of the tablet have been designed to guarantee clarity of vision and allow a clear perception of the system for the users. For this reason, the selected colours for all interfaces are those that appear on Pepper itself, such as white, grey and blue. In particular, to provide a precise correspondence with the selection of the colours employed, the weights were produced in white and grey, while the colours of the device bring back the colours of Pepper’s LEDs.
User Interface (UI)The study focused on the tablet’s graphical interface, so that it would be clear and functional to illustrate the exercises. The choice of using animations with figures representing a dummy performing the exercises stems from the results obtained from trials with users that have shown an uncanny perception in the presence of anthropomorphic figures and robots. In order to optimise the UX, a clear hierarchy was followed between the information provided and the choice of an appropriate font
8584 MakeDesign and Technologies
for the system: sanserif and clearly legible from a distance of about two meters even for visually impaired individuals (Bennett & Flach, 2011; Seymour, 2011).
FeedbackThe human-robot interface is well known to be complex, as it presents articulated sensory feedback: auditory, visual and motor feedback.To achieve a positive interaction with the user, Pepper smiles, employs pleasant words (e.g. good, congratulations and very well) and the volume of its tone adjusts itself and changes depending on the situation. The timing of both motor and vocal responses was also designed to optimize the enjoyment of HRI (Yamamoto & Watanabe, 2006; Namera, Takasugi, Takano, Yamamoto & Miyake, 2008). Finally, great importance has been given to promote a positive reinforcement: the user is praised every time a task is correctly performed, while when the exercise requires a correction the user has the perception of receiving an advice from the robot, rather than of being criticised.
Future research The Wearabot robotic system aims to innovate the relation between technology and the human body. In fact, the wearable device was not designed as a mere tool for data collec-tion while, thanks to the connection with the humanoid robot, it is able to provide the user with immediate visual and verbal feedback. The project therefore aimed to integrate humanoid robotics with wearable technology in an innovative way. The conjunction of these two tools can lead to a new type of approach for HRI that could be successful especially for senior citizens. Furthermore, it is necessary to underline how technology, in this case, is not perceived as a human caregiver replacement but as a useful and performing support for doctors, physiotherapists and nurses. Thanks to the WearaBot, caregivers will be able to improve their preventive work and monitor the progress of each patient over time.Future projects should explore the feasibility of such system and its effects after 12 sessions at home with the use of smaller robots released on loan.Future activities will include periodic meetings between caregivers and patients to opti-mise the suggested exercises, as a medical treatment.This project paves the way to the study of humanoid robotics in a social context, and raises questions about the role of design in the future society where human and robot will coexist.
References
> Aaltonen, I., Arvola, A., Heikkilä, P., & Lammi, H. (2017). Hello Pepper, May I Tickle You? Children’s and Adults’ Responses to an Entertainment Robot at a Shopping Mall. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction (pp. 53–54). New York, USA: ACM. > Bennett, K.B., & Flach, J.M. (2011). Display and Interface Design: Subtle Science. Exact Art (1. ed.). Boca Raton, London: CRC Press. > Buti, L.B. (2008). Ergonomia olistica. Il progetto per la variabilità umana. Milano: FrancoAngeli.> Cruz-Jentoft, A.J., Bahat, G., Bauer, J., Boirie, Y., Bruyère, O., Cederholm, T., & … Schols, J. (2019). Sarcopenia: revised European consensus on definition and diagnosis. Age and Ageing, 48(1), (16-31). > Damiani, P., Grimaldi, R., & Palmieri, S. (2013). Robotica educativa e aspetti non verbali nei Disturbi Specifici di Apprendimento (Vol. 1, pp. 1211-1220). Presented at the Didamatica 2013. Tecnologie e Metodi per la Didattica del Futuro, AICA-Scuola Superiore Sant’Anna-CNR Pisa. > Ethgen, O., Beaudart, C., Buckinx, F., Bruyère, O., & Reginster, J.Y. (2017). The future prevalence of sarcopenia in Europe: a claim for public health action. Calcified tissue international, 100(3), 229-234. > European Commission, Directorate-General for Economic and Financial Affairs, & Economic Policy Committee of the European Communities. (2017). The 2018 ageing report: underlying assumptions and projection methodologies. (2019, 02 february). Retrieved from ec.europa.eu/info/sites/info/files/economy-finance> Fast, J.E., Williamson, D.L., & Keating, N.C. (1999). The Hidden Costs of Informal Elder Care. Journal of Family and Economic Issues, 20(3), 301-326. > Giannopulu, I., Terada, K., & Watanabe, T. (2018). Communication using robots: a Perception-action scenario in moderate ASD. Journal of Experimental & Theoretical Artificial Intelligence, 30(5), 603-613. > IDEO.org. (2015). The Field Guide to Human- Centered Design (1st edition). San Francisco, Calif: IDEO.org / Design Kit. > Ishida, T., Kuroki, Y., Yamaguchi, J., Fujita, M., & Doi, T.T. (2001). Motion entertainment by a small humanoid
robot based on OPEN-R. In Proceedings 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. (Cat. No.01CH37180), Vol. 2, 1079-1086. > Luma Institute. (2012). Innovating for people: Handbook of human-centered design methods. LUMA Institute, LLC. > Lupacchini, A. (2010). Design olistico. Progettare secondo i principi del DfA. Firenze: Alinea. > Martinez-Martin, E., & del Pobil, A.P. (2018). Personal Robot Assistants for Elderly Care: An Overview. In A. Costa, V. Julian & P. Novais (Eds.), Personal Assistants: Emerging Computational Technologies (pp. 77-91). Cham: Springer International Publishing. > Namera, K., Takasugi, S., Takano, K., Yamamoto, T., & Miyake, Y. (2008). Timing control of utterance and body motion in human-robot interaction. In RO-MAN 2008 - The 17th IEEE International Symposium on Robot and Human Interactive Communication (pp. 119-123). > Oberman, L.M., McCleery, J.P., Ramachandran, V.S., & Pineda, J.A. (2007). EEG evidence for mirror neuron activity during the observation of human and robot actions: Toward an analysis of the human qualities of interactive robots. Neurocomputing, 70(13- 15), 2194-2203. > Seymour, S. (2011). Functional Aesthetics: Visions in Fashionable Technology (2010 edition). Wien; New York: Springer. > Tanaka, F., Isshiki, K., Takahashi, F., Uekusa, M., Sei, R., & Hayashi, K. (2015). Pepper learns together with children: Development of an educational application (pp. 270-275). In 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids) > Valentí Soler, M., Agüera-Ortiz, L., Olazarán Rodríguez, J., Mendoza Rebolledo, C., Pérez Muñoz, A., Rodríguez Pérez, I., et al. & Martínez Martín, P. (2015). Social robots in advanced dementia. Frontiers. Aging Neuroscience, 7. doi: 10.3389/fnagi.2015.00133 > Yamamoto, M., & Watanabe, T. (2006). Time Lag Effects of Utterance to Communicative Actions on CG Character-Human Greeting Interaction. In ROMAN 2006 - The 15th IEEE International Symposium on Robot and Human Interactive Communication (pp. 629-634).
The paragraph “Tecnology and design for active ageing” was written by Niccolò Casiddu, the paragraphs “Objectives, Methods, Design of the study” by Claudia Porfirione, the paragraphs “Project Wearabot”, “Human-Robot Interaction design”, “Designers’ role” by Francesco Burlando, while the paragraph “Future Research” by Emanuele Micheli.
[1] The economic old age dependency ratio is an indicator calculated as the ratio between the inactive elderly (65+) and total employment (either 20-64 or 20-74).
[2] There have been studies in which humanoid robots were employed in sessions of physical activity. However, such trials were aimed for entertainment rather than training (Ishida, Kuroki, Yamaguchi, Fujita & Doi, 2001).

87Makediid n.67/2019
Make
Mauro Ceconello, Martina Sciannamè, Davide Spallazzo
> [email protected] [email protected] [email protected]
Taking into account the ways in which artificial intelligence is beginning to pervade everyday life, between misunderstan-dings, uncertainty and mistrust, it is time for design to raise questions and take a leading role in the dialogue between the latest technological innovations and their users. Currently, digital assistants are the main reference in this field, as they passed the initial experimentation, translating machine lear-ning in actual objects. In fact, these products are growing in the market, and they are destined to enter in the majority of our houses, as they already have a very positive sales trend. In this vein, by analysing the current literature, this article aims to investigate the points of contact that make designers the most expert actors to facilitate interaction between individuals and artefacts or intelligent systems, and that make artificial intelli-gence an ideal object of study and working tool. In particular, our design-oriented analysis carried out from the standpoint of function, language and meaning of products integrating arti-ficial intelligence seeks to demonstrate that the two fields can be symbiotic, culminating in the prospects of interaction that is not only functional and understandable, but also practically and emotionally significant. What emerges is that design, and interaction design in particular, already possesses sufficient expe-rience, as well as many of the theoretical requirements, needed to serve as a mediator between artificial intelligence and human beings. The pursuit of more natural interaction might represent a pathway towards fostering and expanding the field of inquiry and experimentation at the intersection of these two disciplines, especially through materialization and an empathic focus on users rather than technology.
Design and AI: prospects for dialogue
[ artificial intelligence, interaction design, design-driven scenarios, aesthetics of interaction, natural language ]
Associate Professor, Politecnico di Milano PhD Student, Politecnico di MilanoResearcher, Politecnico di Milano
Framing artificial intelligenceFollowing the AI-Artificial Imperfection roundtable held in New York in March 2018, Paola Antonelli argued in an interview that artificial intelligence (AI) is the material designers will be called on to engage with in the coming years (Antonelli, 2018).This statement by the curator of MoMA’s design section may seem provocative, but there is no question that AI – most broadly defined as a system capable of learning, reasoning and acting autonomously – is rapidly augmenting the potential of products, interfaces and services typically included in the scope of design, introducing new ways of interacting that designers have yet to thoroughly investigate. In the sphere of AI, the most interesting potential areas of intervention for design can be found in Machine Learning (ML). This is a process of constant learning based on the statistical analysis of enormous amounts of data in order to recognize patterns, used to formulate predictions that then influence the machine’s response to the inputs it receives. Currently, learning can be “supervised”, based on admin-istering data categorized by humans; “reinforced”, learning from errors and being given rewards (enhancements) on achieving set goals; or “unsupervised”, in which the machine interprets uncategorized data in complete freedom, developing skills and behaviours as a result (Hao, 2018). While the unpredictability of this last model makes it less interesting to designers, there are more and more cases in which ML is integrated into industrial products or services intended for the public, to be used at home, in the workplace or in the public sphere. The “Nest” thermostat is an emblematic example: it is an instrument capable of programming itself according to the habits of users and optimizing energy consumption while maintaining a high level of environmental comfort.At the same time, for years now AI has been covertly pervading tools that we use on a daily basis, enhancing Netflix’s system of suggestions, reminding us via smartphone when we ought to leave to avoid traffic on the way home, and in many other ways that we hardly notice.Personal assistants such as Google Home or Amazon Echo recently joined the ranks of these systems. These smart speakers are able to learn through continuous conver-sation with their owners, thus representing a frontier that draws ever closer to the idea traditionally associated with AI, that of sentient robots capable of simulating human behaviour to a believable degree.These applications indicate that AI is generally interpreted in two ways, approaches which have long enlivened the scientific debate: McCarthy’s position focuses on creating a super brain capable of simulating human behaviour, while Engelbart’s position revolves around amplifying human potential through AI (Winograd, 2006). Engelbart’s concept of augmentation views AI as an instrument capable of enhancing the human intellect and potential rather than replacing them (Engel-bart, 1962): an approach much more similar to those historically expressed in the field of Human-Com puter Interaction (HCI), more focused on the user than the machine (Grudin, 2006).
8988 MakeDesign and Technologies
Winograd summarizes these two different positions as two distinct approaches to the theme of AI: a rationalistic approach based on the conviction that essential aspects of thought can be grasped in a formal symbolic representation, and a design-ori-ented approach focused on people’s interactions with their surrounding environ-ments rather than modelling the mechanisms that operate within intelligent systems (Winograd, 2006).These definitions bring the world of AI closer to the field of interaction design, a field that considers interaction in a holistic and more inclusive way than HCI, as the mutual influence among people, artefacts and the contexts in which they are posi-tioned, as dialogue, connection, and social involvement (Kolko, 2011). Considering Interaction Design as the art of facilitating interaction among human beings through products and services (Saffer, 2009), AI appears to fall fully within the scope of designers’ activity. It is also clear that limited theoretical reflection and equally limited fieldwork has been harnessed to answering the question, what can design do for AI? And, conversely, what can AI do for design?Based on an in-depth bibliographic review of the sources currently available, this article provides a preliminary answer to these two research questions. In particular, the treatment of this issue is developed through the three filters of function, language and meaning (Kolko, 2011): the first two aim to concretely investigate possible connec-tions between the two fields, while the last one, by synthesizing the areas of potential identified, definitively paves the way for future prospects of integrating design into AI and vice versa, by synthesizing the areas of potential previously identified.
The designer’s challenge: translating functionClarifying the function of an AI-based system is as difficult as defining the capabil-ities and yhe potential of a human being. Amazon’s Alexa, which in December 2017 had approximately 26,000 functions (White, 2018) accessible to users exclusively via voice interface, is emblematic of this complexity.Everything that design, and interaction design in particular, has taught us over the years is strained when the object of design is not a simple system, whether it’s a product or an interface, but rather a system we might define as sentient.Let us take the concept of affordance, for instance. Discussed for the first time by the psychologist Gibson (1979) as the possibility of perceptible action, that is, a product’s ability to suggest possible actions that might be carried out with it, this concept was then successfully revisited and expanded in the field of design by Donald Norman. Playing with the concept of real and perceived affordance, the author (1988) inves-tigated the difference between the real potential of a product/interface and what it suggests to the user, especially if he or she is approaching it for the first time.It is clear that the bias between the real and perceived affordance of devices such as Amazon Echo is enormous: in a recent article addressing the affordance of virtual assistants, Ryen White uses the term “discovery” to indicate the activity of a user who is exploring the functionality of such devices (White, 2018). In fact, there is no ques-
tion that users may have trouble discovering the thousands of functions potentially offered by a device when they have such minimal interactions outside of voice control. It is therefore evident that the contribution of design can be a benefit for AI-based systems and that, vice versa, design can benefit from these systems. The solution White proposes, in fact, represents an entire field of possibilities for design, a stim-ulus for creating new application scenarios (Manzini, 2001) that facilitate the act of employing the device and making the most of it. At the same time, the new poten-tial that the discipline of design has at its disposal also raises issues that need to be addressed, such as the proactivity of intelligent systems and the management of user privacy. Indeed, the traditional way of conceiving interaction design with feedback and feedforward (Saffer, 2009) turns out to be efficient if the object of study/design is a system programmed to respond constantly to a given input. The proactivity and partial unpredictability of devices enhanced by the use of AI pose designers with what Rittel and Webber (1973) would define as a “wicked problem”: a complex challenge that is difficult to define and solve.In fact, imagining the use scenarios of a product by outlining the so-called User Experience (UX) involves knowing how the product itself will behave in every possible condition. This certainty is inconceivable in the case of an intelligence which, although artificial, is able to learn over time and eventually display different responses to the same input.Not surprisingly, UX is one of the aspects that researchers have analysed most thor-oughly in studying AI-related design. Although rather preliminary, the research centres of Carnegie Mellon University and Aarhus University have carried out studies of UX enabled by introducing AI. In particular, the research focused on ML as a design material as well as its effects in terms of user experience (Dove, Halskov, Forlizzi & Zimmerman, 2017; Yang, Scuito, Zimmerman, Forlizzi & Steinfeld, 2018) and in-depth studies on the use of virtual assistants in everyday life were also conducted (Sciuto, Saini, Forlizzi & Hong, 2018).These studies show that designers have a very generic, non-specific understanding of ML and, consequently, have made little investment in capitalizing on the integration of ML services in their UX activities (Dove et al., 2017). This lack of maximization is due to the yet limited introduction of such issues in the curricula of design universities and to the designers’ very few opportunities to engage with design-driven projects. As happened in the early days of HCI, in fact, engineering fields are still leading the way, and design is currently still in the kind of euphoria and experimentation phase that normally characterizes the introduction of a new tech-nology (Antonelli, 2018). At the same time, the study of user experiences among the owners of virtual home assistants, and Alexa in particular, showed that users are quick to discover the objective limits of these devices, especially limits stemming from difficulties in understanding and a lack of affordance, and rapidly settle for a routine use involving only a few repet-itive commands (Sciuto et al., 2018). As the authors themselves suggest, this situation calls out for designers to step in and begin conceiving of new scenarios of interaction.
9190 MakeDesign and Technologies
In search of a language for AIBy mediating between technology and aesthetics without losing sight of the human dimension (Kolko, 2011), designers play a fundamental role especially in this blurry transitional period. The mediation between innovation and habits may serve to reassure users about a field that remains relatively unknown and still needs to be defined and regulated in society. As the pervasive advertising campaigns aired during the last Super Bowl indicate (Patterson, 2019), a technology that is increasingly similar to us, capable of surpassing abilities we previously considered to be exclusively human and that tends to permeate everyday life, can generate anxiety and fear. However, as Antonelli (2018) argues, the skill of translating abstract and monstrous concepts into something familiar and ordinary is typical of designers and artists: just think of the time when computers were used only by a few individuals and the masses had not yet grasped their potential. To explain the real AI application possibilities, designers must use a language made of form and content and expressed through context and use (Kolko, 2011). In other words, they must tackle the aesthetics of interaction, an aspect that goes beyond formal beauty or usability to also speak to more complex emotional and cognitive processes (Xenakis & Arnellos, 2013). Focusing on use, therefore, aesthetics translates into choices about the form, material, finishing details and behaviour of interactive objects. As the prelim-inary work by Soranzo, Petrelli, Ciolfi & Reidy (2018) demonstrates, design can widely contribute to this field: research into the effects that the materials of the language of design may have in a multi-sensory interaction is still in its early stages. In addition, the contribution of design, to better integrate and transmit the potential of this technology in everyday objects must also extend to psychological elements: from the do-level or scope of interaction to the motor-level or how to achieve it and the be-level, that is, the reason why it makes sense to pursue it (Lenz, Diefenbach & Hassenzahl, 2014). To date, the literature has yet not provided an unambiguous definition of the relation-ship between these parameters, and designers beginning to work on the aesthetics of interaction tend to focus either on the quality and underlying motivations of the interaction, without investigating ways to achieve them, or on a detailed description of the aesthetics of interaction while ignoring how these modes of interaction might be significant (Lenz et al., 2014).According to Sullivan (1896), the form of an artefact should be closely linked to its function, just as a specific interaction should imply clear motivations. This can prove difficult, however, when talking about AI: in addition to the multiple functions previ-ously mentioned, the potential of these systems can even transcend the intentions of their creators. Besides software, interactive speakers represent a tangible rendering of AI in that they aim to generate interpersonal interaction by recognizing and repro-ducing human speech. However, plagued as it is by mutual misunderstandings, this dialogue mainly appears to highlight the still-significant gap between the human and digital spheres, just as early HCI did.To facilitate more natural and user-centred interaction, initial research shows that users perceive a complex sensorial experience in which the tactile component plays
a fundamental role as “more human” is, which results in the people involved in such interactions significantly modifying their behaviour and reactions (Liu & London, 2016; Soranzo et al., 2018), a finding that in turn suggests a productive direction for further research.If it is true that design can constructively investigate interactions between users and AI, whether translated into the physical world, it is equally true that, likewise AI offers designers completely new stimuli. Today, designers must necessarily foresee, favour and facilitate interactive modes that are delimited within a restricted range of possi-bilities, thus giving rise to static interactions, with analogue as well as digital objects. Despite users’ infinite creativity, in fact, in terms of programming the response of an object or system remains trapped inside the consequential logic of “If...Then”. The adaptive nature of AI algorithms, in contrast, allows artefacts to evolve and even to recognize and respond appropriately to the emotions of their users (Liu & London, 2016), thereby providing design with a vast range of new scenarios to explore and make the most of.The challenge for design is to achieve a balance between product “familiarity” and “freedom of innovation” (Clapper, 2018), between designer “control” and the “over-whelming power” of technology. The risk we run, in fact, is that of creating artefacts that cannot be deciphered – except by those who created them – or that are carried away by the unpredictability of ML. By setting our sights on responding to human needs and taking into account their specificities (including the mechanisms of auto-mation caused by habit), however, designers can capitalize on the right degree of predictability to balance novelty and usability through a shared language that avoids complicating the UX (Fisher, 2018).
The contribution of design: a meaningful synthesisAlthough design, with its attention to details, makes it possible to establish an “ethe-real dialogue” with users (Kolko, 2011), its relevance is given, however, by the meaning that the recipient will give to it. This factor has yet to be sufficiently investigated in the context of AI. What significance do we attribute to this technology? What is its role in society? And above all, why do we need it? Programmers have solved these issues in some specific cases, typically those involving software integration, and yet voice assistants are emblematic proof that we are still plagued by uncertainty. So, how can our interactions with AI become meaningful?On one hand, HCDA can be a source of meaning: by bringing the use of AI into alignment with human needs, we could avoid the trap of creating extremely powerful systems designed to solve problems that don’t exist (Lovejoy, 2018). On the other hand, well-established theories (Merleau-Ponty, 1945) argue that our experience of the world through the body and situated action is a generator of meaning. It follows that experience and intuition are more important than abstraction (Hummels & Overbeeke, 2010) and, therefore, by identifying appropriate languages and functions we can make interaction mechanical, tangible and meaningful once again.
9392 MakeDesign and Technologies
Conversely, if we consider AI to be a replica of human intelligence in its very nature and apply this similarity to the ways it expresses itself as well, the meaning of inter-action can be sought precisely in the features of interpersonal interactions. Although it is quite different than ML, the digital agent described in Marti’s work (2010) iden-tifies a key point for solving this problem: what generates meaning in interaction is not only our perceptions of the world, but also our experience of being perceived by it. Mutual influence has been shown to lie at the foundations of the aesthetics of the experience between two sentient beings, and this mutuality is expressed through perceptual crossing, that is, involving all the senses across the board when interacting with artefacts.By synthesizing the key principles identified for clarifying the function and devel-oping a communicative language, therefore, interactive systems based on AI could demonstrate their responsiveness to users on multiple levels and thereby generate significant interaction. Pilot experiences are leading to this direction: it is the case of Maslo, an app able to listen, learn and empathically respond to its users’ needs to help them focus on important aspects of life; or of the “Affinity in Autonomy” project, that Sony presented at Fuorisalone 2019, in which robots perceive and consequently adapt their behaviour to that of the visitors to prove the possibility of a proficient cohabitation. Also, Apple seems to be moving towards this purpose with its Home Pod, which will be able to interact through gestures, tactile feedback, as well as inter-preting emotions.The challenge posed by Antonelli thus proves to be a forecast for the future: designers acting as mediators between technological innovation (AI) and everyday life to create innovative scenarios.
References
> Antonelli, P. (2018). AI Is Design’s Latest Material. (2018, 08 february). Retrieved from https://design.google/library/ai-designs-latest-material> Clapper, G. (2018). Control and Simplicity in the Age of AI. (2018, 04 october). Retrieved from https://design.google/library/ control-and-simplicity> Dove, G., Halskov, K., Forlizzi, J., & Zimmerman, J. (2017). UX Design Innovation: Challenges for Work-ing with Machine Learning as a Design Material. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems (pp. 278-288). New York, NY, USA: ACM. > Fisher, K. (2018). Predictably Smart. (2018, 20 march). Retrieved from https://design.google/library/predictably-smart> Gibson, J.J. (1979). The Ecological Approach to Visual Perception (1. ed.). New York, London: Taylor & Francis. > Hao, K. (2018). What is machine learning? MIT Technology Review. n.d.> Hummels, C., & Overbeeke, K. (2010). Special Issue Editorial: Aesthetics of Interaction. International Jour-nal of Design, 4(2), 1-2. > Kolko, J. (2011). Thoughts on Interaction Design (2. ed.). Burlington, Massachussets: MK Publications. > Lenz, E., Diefenbach, S., & Hassenzahl, M. (2014). Aesthetics of Interaction – A Literature Synthesis. In NordiCHI ’14. Helsinki: ACM New York. > Liu, X., & London, K. (2016). T.A.I: A Tangible AI Interface to Enhance Human-Artificial Intelligence (AI) Communication Beyond the Screen. In DIS ’16. Bris-bane: ACM New York. > Lovejoy, J. (2018). The UX of AI. (2018, 25 january). Retrieved from https://design.google/library/ux-ai> Manzini, E. (2001). Sustainability and scenario building. Scenarios of sustainable wellbeing and sustainable solutions development. In Proceedings Second International Symposium on Environmentally
Conscious Design and Inverse Manufacturing (pp. 97–102). s.n.> Marti, P. (2010). Perceiving While Being Perceived. International Journal of Design, 4(2). > Merleau-Ponty, M. (1945). Phenomenology of Per-ception. London: Routledge. > Patterson, T. (2019). The 2019 Super Bowl Ads Are a Case Study in Technological Dread. (2009, 02 feb-ruary). Retrieved from https:// www.newyorker.com/culture/on-television/the-2019-super-bowl-ads-are-a-case-study-in-technological-dread > Rittel, H.W.J., & Webber, M.M. (1973). Dilemmas in a general theory of planning. Policy Sciences, 4(2), 155-169. > Saffer, D. (2009). Designing for Interaction: Creating Innovative Applications and Devices (2. ed.). Berkeley, CA: New Riders Pub. > Sciuto, A., Saini, A., Forlizzi, J., & Hong, J.I. (2018). «Hey Alexa, What’s Up?»: A Mixed-Methods Studies of In-Home Conversational Agent Usage. In Proceed-ings of the 2018 Designing Interactive Systems Con-ference (pp. 857-868). New York: ACM. > Soranzo, A., Petrelli, D., Ciolfi, L., & Reidy, J. (2018). On the perceptual aesthetics of interactive objects. Quarterly journal of experimental psychology, 71(12). > Sullivan, L.H. (1896). The tall office building artis-tically considered. Retrieved from http://archive.org/details/ tallofficebuildi00sull > White, R.W. (2018). Skill Discovery in Virtual Assist-ants. Communication of ACM, 61(11), 106-113. > Xenakis, I., & Arnellos, A. (2013). The relation be-tween interaction aesthetics and affordances. Design Issues, 34(1), 57-73. > Yang, Q., Scuito, A., Zimmerman, J., Forlizzi, J., & Steinfeld, A. (2018). Investigating How Experienced UX Designers Effectively Work with Machine Learning. In Proceedings of the 2018 Designing Interactive Sys-tems Conference (pp. 585-596). New York: ACM.
95Makediid n.67/2019
Make
Claudio Germak, Lorenza Abbate
> [email protected] [email protected]
It is commonly believed that service robots will have a prominent place in investments in competitive research in the near future and that, from the point of view of combined knowledge, technology and the humanities, also Design can make a fundamental contribution to the acceptance of robots by people. In this sense, the designer can do a lot, not only as a designer, but also as an ethical mediator between hard technologies and humans, working to facilitate and improve their interaction.A game that is played at product and service level, through the evaluation of robots interaction and morphological expressiveness, that in design glossary is described as a complex and significant combination of sign and function. This paper, supported by the experience of roboEthics design that the authors are carrying out on topics related to robotics for entertainment, education and space accessibility facilitation, proposes a reflection on the morphological evolution of the service robot as a result of the combination of technological, anthropological, use and expressive aspects.An evolution generated, on the one hand, by the accelerated development of digital and mechatronic technologies and, on the other, by the expansion of interaction: from the direct human-machine and human-robot interaction to the human-machine-human interaction, where the robot is a mediator between two or more people. A scenario that has been evolving for over a century, in which the service robot has also changed its image according to its use: alongside the humanoid imitating version, still widespread and protagonist of pop culture and bio-robotic research, is the humanised and contextualised image in which the form, i.e. the expressiveness, adapts to the service, i.e. to the foreseen activity.
RoboEthics: form follows service
[ roboEthics, interaction design, perception, expressiveness ]
Full Professor, Politecnico di TorinoPhD Student, Politecnico di Torino
Service RoboEthicsIn recent years, there has been an increase in experiments in service robotics whose aim is to assist humans in their daily tasks. The service robot is starting to enter private and collective places, from home to office, from school to commercial spaces, always with new tasks: secretary, personal assistant, companion, supervisor, trans-porter and much more (Nourbakhsh, 2013). But what are service robots?In a definition shared by scholars and developers, they are artefacts with incremental levels of artificial intelligence, autonomy (Sacripanti, 2008) and human-like move-ment and sensory skills of seeing, hearing and speaking (Germak, Lupetti & Giuliano, 2015). Some also call them social robots, in reference to the situations of coexistence and interaction that are created with human and that have led the way of conceiving and programming them to adapt to this condition. From a project of robots confined to the laboratory, in fact, we have moved to one in which human is at the centre of the laboratory, with his own needs, attitudes and behaviours.RoboEthics proposes a sustainable vision of the relationship between human and robot based on increasing levels of integration, mediating between ethical require-ments and hard technologies through a conscious design of the risks and benefits inherent in the dissemination of these artefacts (Veruggio & Operto, 2006). It does so by investigating the aspects of deployment (where and why it is needed), use (who uses it and how) and management (who manages and maintains it and how).Barbara Henry, Professor of Political Philosophy at the Scuola Sant’Anna, in an interview on ethics applied to robotics, argues how important it is to be aware of the responsibility inherent in conceiving and creating service robots. It is in fact a complex activity, linked to the nature of the human being, characterised by three dimensions – biological, social, cultural – that cannot be treated separately from the project. Conceiving, programming and designing service robots therefore also requires an effort in foreseeing the future. Foreseeing means predicting and simulating ideal scenarios, in which pervasive technologies find a balance with the social and cultural dimension of humans, mainly consisting of relationships with other individuals and the context (Sabanovic, 2010). The roots of post-human thinking also lie in this dimension and here, therefore, we must look for answers to the question of integration between human and robot. Are we trying to humanise robots? Salvatore Iaconesi (2018), designer and robotic engineers who put his cancer online, says yes, “but because it is the human being which becomes progressively more similar to machines”. A sense of apprehension that is also felt in the upper spheres of the industry’s research, which is not aimed at anxieties concerning the development of machines in themselves, but rather at how humans will be able to live with those machines, maintaining a conscious and human distance from them.
9796 MakeDesign and Technologies
Perception, acceptance, sharingForeseeing future scenarios can also be useful for finding clues about the profile and role of the robot of tomorrow (Ferrando, 2012). If, as the data suggests, service robots grow in number and autonomy, we will have to manage an important change linked to the transition from a condition of possession and control of the robot by man, typical of the Asimov school of thought, to a condition of coexistence between human and robot.(Salvini, Laschi & Dario, 2010). A coexistence that we hope will be peaceful, trusting in robotics as a tool of social progress, but which depends on certain rules.The first requires scholars, designers and end users, in co-design mode, to question the utility of the robot, verifying that these are not functions which are superfluous to human needs and that they do not lead to technological redundancy. The second requires ensuring that the robotic service does not completely replace the relational aspects between humans and that it is compatible with the cultural and social context in which it is placed.The third, also to avoid abject failures, quite frequent in the first steps of commercial robotics, requires certain factors to be measured, for example: the level of complexity in terms of usability, the trialability, i.e. the possibility of having the tool tested several times before its actual application, as well as the study of robot-specific forms of communication (expressiveness, movement, speech) since it is well known that its acceptance also depends on its appearance and personality (Kiesler & Goetz, 2002). Among design tasks it is to make people feel at ease in starting and maintaining the user interacting with the robot.To bridge the gap between human and robot it is therefore essential to investigate differences and similarities, starting with the question of why most robots still resemble humans (Hegel, 2012).Looking at the multiplication of services offered by the evolution of artificial intelli-gence, the answer is not simple, both on the theoretical level as well as on that of the validation processes. This is because thinking in terms of HRI (Human Robot Inter-action), the multiplicity and transversality of biological, social and cultural factors can promote or deny acceptance of robots by humans. The complementary nature of the elements that characterize the expressiveness of service robots, and which influence the acceptance are at the center of this reflection.
The service robot in pop cultureThe anthropomorphic image of the robot is that most widespread in pop culture through comics, books, TV series and films. Only recently has this association been flanked by other, more abstract and creative interpretations, partly influenced by the digital culture and by the new approaches of contextual and allusive design. In the collective imagination of the beginning of the 20th century, the robot was considered to be a product of science fiction and its somatic aspect was associated with terror, generated, on the one hand, by expressions of gigantism and evil and, on
the other, by the possibility that robots, kept like slaves, could one day exceed human abilities and, as in human history, rebel. As in the film Metropolis, where the robot was attributed the role of helper with anthropomorphic features and a similar nature.Subsequently, robots acquired the ability to have feelings, creating a good-bad dualism accompanied by an anthropomorphic profile: from that of the android in Blade Runner, a mechanical angel who feels it is time to die and starts to have feelings, to the cyborg in RoboCop, an anti-crime hero created from the assembly of mecha-tronic prostheses with the remains of a real dead policeman, or the mechanical robot that in I, Robot is a trusted humans collaborator. The transition from the anthropomorphic to the mechanical image took place at the end of the seventies, with the prolific Star Wars series, which, alongside the humanoid, once again in vogue in the most recent episodes, introduced small and likeable robots that seemed to be the expressive combination of the clichés of mechanics and industry. The shapes became compact, the head integrated with the bust, eyes and intermittent lights of a mechatronic nature appeared. The robot also associates an ethical conduct with its funny expression, which makes it worthy of trust as in the example of the best known series, that of the droid “R2-D2”, faithful servant of the masters and able warrior. There is also no lack of interpretations of fantasy, which abandon anthropomorphic aesthetics but not humanoid behaviour, as in the 2008 animated film “Wall-E”, a collab-oration between Pixar and Disney. A typical product of Disney’s metaphorical imagery, Wall-E is a small mechanical robot, which has remained the only road sweeper on Earth, abandoned because it is full of waste. He meets Eva, with which he falls in love, a robot halfway between a policewoman and a fairy, characterised by a femininity evoked by slender lines and shiny surfaces. A robot that alludes to the contemporary digital language, that of the famous Apple products, designed by the same author Jonathan Ive. These two figures well represent the expressive dichotomy that characterises today’s service robotic artefacts: the former, equipped with mechanical motion and simple apparatus seems to come out of a self-construction laboratory; the latter, all cleanliness and harmony of forms, could be a tribute to ”gute form” industrial design. Looking at these examples, it is important to underline that acceptance of the figure of the robot is therefore subject to an overall judgement that does not differentiate between expressiveness and personality and therefore between appearance and communication. Expressiveness should therefore be understood as the overall ability to express sensi-tivity, emotion and empathy with those who interface with it. (Longo, 2006).
From humanoid to humanised: a matter of design History shows that the imitative approach has been used in designing most humanoid robots, capable of replicating certain traits typical of the human being, from the morphology of the body to motor and perceptual abilities. Over time, this category has been further divided into androids and cyborgs, which allude to humans by combining technical components.
9998 MakeDesign and Technologies
Masahiro Mori (2012) conducted research on the level of acceptance of the humanoid robot by humans, highlighting its limitations. In general, people are more prone to interact with humanoid robots, but there is a limit beyond which individual creates a sense of proxemic insecurity, particularly when the distances between the two decrease. Think of the feeling experienced when a robot shakes the hand of a person and that person perceives it to be a prosthesis: it is an ambiguous contact, between what wants to appear human and what we know to be artificial. Providing robots with a recognizable function and meaning (affordance) could help the user to mitigate the sense of insecurity and anxiety and increase the sense of familiarity.In the same way, also the android robot, with its mechatronic appearance, has sparked a reflection on the transition from a prevalently mechanical to a cognitive nature (Marras & Mecacci, 2014).In this sense, more recent studies have shown that, in addition to the physical appear-ance, it is necessary to consider the behaviour of the robot, in order to create more empathy. These are robots used as study prototypes that are able to interact both phys-ically and emotionally with people, also learning from their behaviour. Able to react to the stimuli of people, adapting their expressions, voice and movement (Breazeal, 2003). A lot of work has been done on movement in terms of naturalness, i.e. fluidity and articulation, because these are among the characteristics attached to the biological nature of individuals (Kupferberg, Glasauer, Huber, Knoll & Brandt, 2001). But if these features are lacking, i.e. when the variety of gestures is limited, repetitive and such as to highlight their mechanical origin, the movement of the robot will be perceived as boring. Another element capable of inf luencing the user’s perception is the relationship between the “form” of the robot and the “service” for which it was created and between the former and the “context” in which it operates.Looking at small household appliances, for example, one can see that their success depends not only on their resemblance to other household equipment, but also on the small size and familiarity they express: people call them by their name, spend time watching them work and do not fail to praise their qualities in front of others. Since the beginning of the new millennium, assistant and companion robots have also appeared on the market, still characterised by a humanoid identity associated with a standard service offer. Among these is Wakamaru, a cognitive robot for domestic use with movement, upper limbs, voice recognition and internet connection, designed in 2003 by Toshiyuki Kita. A rigorous design project, subject to cognitive testing and extensive engineering by Mitsubishi to ensure a safe, reliable and acceptable product. Certainly a prolific family, which, from Honda’s Asimo to SoftBank Robotics’ Pepper, has seen a succession of generations of assistants whose characteristic is to evolve, not so much the design of the shape, but that provided in terms of service, subject to constant updating and implementation. A phenomenon which, thanks to the dissemination of open-source robotic platforms, has involved many advanced technology projects, such as the Italian case of iCub, an android child with movement
and artificial learning, developed by the Italian Institute of Technology in Genoa as part of the 2009 European RobotCub project. The robot acceptance also depends on the possibility of “integrating socially” within the ecosystem in which it operates. In fact, recently, with the spread of products for social robotics, there has been a simplification of the sophisticated approach of mechatronic engineering in favour of more agile and friendly models, intended for domestic and cultural use, increasingly connected to social media platforms. In 2014, Cynthia Breazeal, a researcher at MIT, conceived Jibo, an assistant and companion robot, which is able to observe, recognise faces, take photographs, interact verbally, learn from user behaviour and communicate emotions. Its functions are not very different from those of a smartphone, but it has been provided with autonomy of execution and ability to orient itself following people’s gestures and movements. The robot has therefore raised the level of interaction by presenting itself as a communi-cation product with new expressiveness, based on the use of synthetic and familiar languages, starting with moving the head towards the interlocutor, combining move-ment and tone of voice (Salah, 2014). In summary, Jibo is an IoT piece of furniture, always connected, but with a formal identity that alludes to the cult objects of the history of Design.Among companion robots, a significant change was introduced in 2015 with Double, a telepresence robot with valet and controller function, now on the market with several models. This was a substantial change, which went beyond the “man-robot” relationship, introducing a “man-robot-man” relationship in which people communicate as in a videoconference through a screen. With a few minimal design gestures, this robot alludes to the morphology of the human skeleton: for the head it has a simple tablet, for the body a thin rod and for the feet two wheels moved by a motor with gyro sensor that give it that naturalness of balance, typical of human nature. Its use is flexible and also assumes social aims to promote virtual interaction between distant people. Among the future places of use are schools, where it could ensure students, absent for serious reasons of health and disability, a combination of real and virtual attendance. In this way, students will be able to maintain relations with teachers and classmates, and will also have the possibility to move freely within the school. Innovative in terms of social accessibility is Virgil, created in 2015 from a collabora-tion between TIM, Design Politecnico di Torino and the Terre dei Savoia Association (Giuliano, Lupetti, Khan & Germak, 2017). This is a telepresence robot designed for visiting museum spaces that are ‘not’ accessible due to architectural barriers, safety or restoration sites. The robot, controlled by a veritable Museum Guide, carries out a tour, which can always have a different itinerary within these spaces, sending live images alternated with multimedia compendia. At the end of the tour, Virgil comes out among the visitors, who can admire the elegance of the design, characterised by decorative motifs of the livery, which in a perspective of contextualised expressive-ness, change in relation to the museum in which it operates.
101100 MakeDesign and Technologies
Alongside the robot models mentioned above, oriented towards a repeated (in some cases serial) production, in many laboratories makers are carrying out intense exper-imentation that uses shared digital platforms, which are therefore implementable and differentiable. Among the most well-known is, the robot Arduino, characterised by a completely open approach in terms of both hardware and software. Due to the quan-tity of versions proposed, these applications resemble the Meccano game, involving the assembly in self-production of very different components one from the other, by also very different users: from children engaged in robotic play/education activities, to the inventors of smart objects.
Service management: an interdisciplinary issueThe future of service robotics depends not only on an ethical project for the devel-opment of man-machine interaction, guaranteed in terms of perceived and accepted expressiveness, but also on sustainable models of strategic design that allow its dissemination and a convincing positioning on the market. The service robot, considered a complex product, is currently proposed to the market in two ways. The first considers the robotic artefact as an industrial product, whose management is completely entrusted to the end user. The second, on the other hand, envisages a product that is conceived as a tool within a system that mainly offers services, such as in the case of the activities proposed in the museum or recreational/educational context. In this case, the experience is experienced by end users with the contribution of specialized operators.The activity becomes more complex both on an experimental and on an economic and service management level. And it is also the reason why the start-up company seems today to be the favorite subject for the management of the entire business, from the product to the service, being able to ensure fast development times, in the face of a limited use of resources, and efficient management over time.The developments in service robotics are therefore strictly connected to the problems of roboEthics, an area that requires continuous reflections on the methodological, theoretical-philosophical level and which leads to questions about how we conceive human-robot interaction.We are therefore already projected into a future of open systems, in which the skills required by service robotics are interdisciplinary and in which design takes on the role of a mediator of knowledge and designer of the robot’s identity.
References
> Breazeal, C. (2003). Toward sociable robots. Robot-ics and Autonomous Systems, (p. 42). Elsevier. > Ferrando, F. (2012). Postumanesimo, Alterità e Dif-ferenze. La Camera Blu, (p. 8). > Germak, C., Lupetti, M.L. & Giuliano, L. (2015). Eth-ics of robotic aestethics. In Design and Semantics of form and movement (pp. 165-172). Milano. > Giuliano, L., Lupetti, M.L., Khan, S. & Germak, C. (2017). Ethic reflections about Service Robotics, from Human Protection to Enhancement: Case of Study on Cultural Heritage. In Robotics-Legal, Ethical and Socio-economic impact (pp. 93-109). s.n.> Hegel, F. (2012). Effects of a Robot’s Aesthetic Design on the attribution of social capabilities. In RO-MAN, 2012 IEEE (pp. 469– 475). s.n.> Iaconesi, S. (2018). Un Colpo al Cuore. Nel cuore dell’innovazione e della sua rivoluzione. (2018, 03 march). Medium. Retrieved from https://medium.com/@ xdxd_vs_xdxd/un-colpo-al-cuore-87fabf-1be014. > Kiesler, S., & Goetz, J. (2002). Mental models and cooperation with robotic assistants. In Proceedings of Conference on Human Factors in Computing Systems (pp. 576-577). Minneapolis:ACM Press. > Kupferberg, A., Glasauer, S., Huber, M., Knoll, A., & Brandt, T. (2001). Biological movement increases acceptance of humanoid robot and human partners in motor interaction. In Artificial Intelligence & Society. s.l. Springer.
> Longo, G.O. (2006). Uomo e tecnologia: una sim-biosi problematica, Trieste: Università di Trieste. > Marras, L., & Mecacci, A. (2014). La sparizione del design. Aisthesis. Pratiche, linguaggi e saperi dell’es-tetica. Firenze: Firenze University Press. > Mori, M. (2012). The Uncanny Valley. In IEEE Robot-ics Automation Magazine.s.n.> Nourbakhsh, I. R. (2013). Robot futures. S.l.The MIT Press. > Šabanovic’, S. (2010). Robots in society, society in robots: Mutual shaping of society and technology as a framework for social robot design. International Jour-nal of Social Robotics, 2(4), 439-450.> Sacripanti, A. (2008). Robotica (2007). La Robotica nel Mondo, il Mondo della Robotica. Stato della Ro-botica Mondiale. In Report ENEA (National Agency for New Technologies, Energy and Sustainable Economic Development). > Salah, A.A. (2014). Natural multimodal interaction with a Social Robot: what are the premises? In RF-MIR’14. Istanbul. S.n.> Salvini, P., Laschi, C., & Dario, P. (2010). Design for Acceptability: Improving Robots’ Coexistence. In Human Society. In International Journal of Social Ro-botics, 2. Springer. > Veruggio, G., & Operto, F. (2006). Roboethics: A bottom-up interdisciplinary discourse in the field of applied ethics in robotics. In International Review of Information Ethics (pp. 2-8). Ss.l. Ethics in Robotics.
103Make
Make
diid n.67/2019
Gianmarco Paduano, Sara Nappa
> [email protected] [email protected]
A little over 60 years after the release of the first CAD software, a new avant-garde of architecture and design has evolved that looks at parametric design, robotics and artificial intelligence systems as the tools to achieve innovative goals in the making of highly complex artefacts. New skills have been developed to build both small and large-scale projects, to customise industrial products with non-standard processes, to optimize and to use materials of different nature in a better performing way.The automation of industrial robots applied to architecture, allows to reduce the margin of error in the realization of artefacts. With increasing versatility, reliability and precision it is possible to execute complex processes with a high degree of control and repetitiveness. The possibility of integrating programming software of industrial robots with the parametric CAD modelling environment makes these technologies more accessible even to non-experts. Remote control allows the final production site to be relocated, to the point that in the near future it will become possible to manufacture entire housing units on other planets.In this intricate scenario, engineers, designers, mechatronics, programmers, makers, artists, collaborating with each other, blend, creating new construction models that affect the aesthetics and the making process.The design experiments of Penelope Agorà and Bubblebase presented in this work represent an example of this enormous challenge through the narration of the modern logic of the debate between thought, design and realization.
Of Robots, Wood, Ropes and Martian Sand
[ robots in architecture, digital fabrication, parametric design, morphology optimization, mars colonization ]
Technicians, PRISMALab - University of Naples Federico II
Design and RoboticsStarting in the 1950s, architects, scholars and technicians began to question the role that new technologies would play in architectural project process.Nicholas Negroponte, imagined a “distant future” in which «computer graphics tech-niques would become the paradigm for computer-aided architectural systems» (1969, p. 12), and dedicating his book, The Architecture Machine, «To the First machine that can appreciate the gesture» (1973, preface), called for a world in which designers and machines would live and work in strong connection with each other (Steenson, 2017, p. 166).This theory, combined with the introduction and diffusion of increasingly high-per-formance hardware, powerful and flexible software,[1] the use of numerical control machines for manufacturing and the use of advanced robotics within manufac-turing processes, lays the foundations for the era of “intelligent digital architecture” (Steenson, 2017, p. 168).In this era, the gap between the digital model and the production process is reduced, and the figure of the Master Builder (Carpo, 2017, p. 2), the medieval craftsman responsible for all aspects of a project, able to express through his work a summary of theoretical and practical knowledge, is no longer sufficient.As a matter of fact, the creative labs, large open spaces with multiple workstations, in which areas are set up with CNC pantographs, 3D printers, electronic equipment and anthropomorphic robotic arms, are also filled with different professional figures, each with different approaches and knowledge, that cooperate together, sharing a common perspective.In the embryonic phases of new design and scientific paradigms, or, as Lorena Preta calls them, hybrids of passage (1992, p. X), the use of contaminations between different disciplinary fields often turns out to be fruitful.Intersections, exchanges, analogies, contaminations, appear indispensable tools to outline a new design knowledge.As the words of Langella prove:«the possibility of managing complex variables has fostered the creation of distinctive languages, recognizable both in architectural projects (Frank O. Gehry, Greg Lynn, Zaha Hadid) and in product design» (2017, pp. 7-8).And this is where design becomes a driving force for the mediation between different skills, techniques and languages. The designer interprets and transfers, adapting context passages; research solutions and knowledge gains for both persistent and emerging problems; combines interdisciplinarity, producing promising and meaningful design intersections through lateral thinking.The digital designer becomes, thanks to the contamination with different know-hows, a figure able to use the technological tools at his disposal almost as if they were a body prothesis, an extension of his abilities; not only as tools, able to contribute to the crea-tion process, but rather as tools for thinking, able to transfer and synthesize the entire reasoning process in digital form and to project the mathematical model in the physical space, elaborating in this way new aesthetic poetics.
105104 MakeDesign and Technologies
Penelope agorà, intersection between creativity and technologyDriven by this wind of innovation, in 2015, from the industrial suburbs of Naples, emerged the Design and REsearch in Advanced Manufacturing (D.RE.A.M.) FabLab of Città della Scienza, the laboratory-workshop and experimentation center dedicated to new digital fabrication technologies and to the exploration of trans-disciplinary areas for innovation in production processes.[2]
One of the objectives of the team’s design speculation is to make architectural fabri-cation a completely automated process, through the use of one or more robotic arms, extending its potential with different technologies and tools, supported by the defini-tion of geometric rules generated by the processes of computational design.New technologies and the use of robots in a symbiotic relationship with the designers allow not only to change the way things are made, ensuring more safety, effectiveness and efficiency, and giving the possibility to prototype thousands of different things just once, but also to change the creative process: form, expression, function, tool path, reachability, are just some of the parameters with which the designer can “play” to affirm the aesthetics of the project.A demonstration of these experiments is the Penelope Agorà project, which stems from the need to create a temporary structure to host talks during public events.The work group in charge of defining the project, composed by G. Paduano and S. Nappa, with the collaboration of C. Tamborra and G. Salerno, focused on the internal-external binomial phase, on the possibility of creating an ambivalent envi-ronment, which was both comfortable and reserved for conference users, but also attractive and transparent for passers-by. An amphitheater which, in addition to amplifying sound naturally, allowed to filter light and external confusion.The new digital tools make it possible to design and build the architectural shell no longer as a simple separation that controls and divides the interior spaces from the external ones, but rather as a filter, a dynamic boundary capable at the same time of combining with the demands of expression and architectural language and functional and wellness needs (Mencagli, 2015).In addition to a formal research, the team wanted to focus on a material and compo-sitional study: using poor components, of traditional craftsmanship, optimizing and simulating, in the design phase, the potential and structural behavior.The sum of these specifications constituted a set of variables in order to mathe-matically define an algorithm to solve the combination of shape, geometry and materials. A multivariable optimization problem has been solved by the use of softwares (Grasshopper 3D, Matlab and openCV libraries). The process led to the choice to use birch plywood and nylon cordage as the main materials, using kerfing and pre-tensioning techniques.The final shape is a structure of 63 square meters and a total height of 3 meters, composed of 12 modules, joined together with a system of dry pinning and supported by sub-modules in cordage. The nylon weft, elastically deforming the wooden parts with different bending radii, creates a genome of geometric patterns.
The curved shape towards the inside is effective in harmonizing sounds, the lattice structure to create interesting chiaroscuro effects depending on the distance of the observer, the modularity to make setting up and dismantling easier.KUKA-prc[3], a programming software for the control of anthropomorphic robot arms developed by “Association for Robots in Architecture”, was used to define a complex weave and to plan tool trajectories. By using these functional blocks it was possible to avoid singularities and collisions, always guaranteeing the reachability of the robots. Two KUKA Quantec KR120R2700s were used for this process.The manufacturing workflow is divided into several phases: milling of the modules using a commercial 10KW spindle as end effector, positioning of vertical submodules and eyelets, tensioning and weaving and finally iteration of the process.The most complex part of the entire manufacturing process is the tensioning and weaving phase. The second robot uses a custom tool for the drafting of continuous textile fibers designed and built inside the D.RE.A.M. FabLab[4].Penelope Agorà was the place where dozens of thematic conferences were held during the Futuro Remoto event[5], including one dedicated to new technologies applied to architecture and material design supported by the Viennese architect Stefan Rutzinger,[6] generating strong interest and curiosity from the public.Penelope Agorà is the synthesis of the competences put in place by the figures of the team, the result of a “fluid practice” (Lindsey, 2002, p. 91), of continuous self-cor-recting iteration between productive innovation and human contribution.This experience was significant, leading the team to question themselves, like many pioneering robotic manufacturing labs, such as the ITKE in Stuttgart or the ETH in Zurich, on the potential of Robotic 3d Printing and on the implications that these technologies will have in the construction sector.
Unconventional machinesAdditive and material construction techniques have now reached such a maturity as to be aimed at cutting-edge projects and visionary applications.Rapid prototyping based on Fused Deposition Modeling (FDM) has been known since the early 1990s, but only following the popularization activities of open source communities and makers it has become a phenomenon of global interest for everyone.Today the set of processes for the FDM additive manufacturing, as well as Selective Laser Sintering (SLS), Stereolithography (SLA) and Digital Light Processing (DLP), is commonly referred to as “3D printing”.The main advantages that derive from this rapid diffusion can be found in the most varied applications ranging from the restoration and preservation of cultural heritage to the realization of mechanical parts for robotics, or from the creation of low cost protheses to new forms of artistic expression.The characteristics of these machines are becoming increasingly sophisticated: the increasingly rapid speed of production, the most efficient performance, the availa-bility of new materials and the scalability of constantly growing projects.
107106 MakeDesign and Technologies
The most popular 3D printing machines are equipped with three linear degrees of freedom on orthogonal planes, in the case of Cartesian machines; or the combina-tion of three arms implemented for a delta printer. The working volume is always confined within the structure of the machine itself, regardless of the type of kine-matics adopted.The Italian WASP project[7] has the objective of creating buildings with innovative methods based on the extrusion of clay-based materials with large machinery for manufacturing at zero kilometers.With the collaboration between the Institut d’Architecture Avancée de Catalogne (IAAC), Acciona, a Spanish group specialized in construction and the inventor Enrico Dini, the first bridge entirely printed in 3D with fiber-reinforced concrete (fibers in polypropylene) was built in Madrid.It is clear that scaling down the dimensions of the objects to be realized at the architectural level corresponds to the use of machines of ever larger dimensions.For this type of experimentation, it is often more convenient to use robot arms, both fixed and mobile, to drastically extend the reachability of the joints, guaranteeing a limited obstruction. Furthermore, the kinematic configurations of anthropomor-phic robot arms with 6 or more degrees of freedom (Degrees of Freedom – DoF) simplify the fabrication of complex structures that could not be realized with 3 DoF machines.The possibility of governing automatic processes for the fabrication of highly complex architectural artefacts, applying the principles of computational design and testing of hybrid materials with high technological value, is strongly prepara-tory to the experimentation of building housing structures in unconventional or even extraterrestrial contexts.
Experimentation of living components for marsThe exploration and colonization of new planets by Man is a recent topic on which the major aerospace research institutions, the National Agency for Space and Aero-nautical Activities of the United States of America (National Aeronautics and Space Administration, NASA), SpaceX[8] and university research groups around the world invest resources to find solutions and make these scenarios possible within the next decade.With the aerospace technologies available today, the biggest constraint is linked to the cost / payload ratio transportable by carrier rockets. Madhu Thangavelu sees a human settlement on the Moon possible through “first of all the shipment of small autonomous robots for the use of local resources (in-situ resource utilization, ISRU), for the generation of electricity, communication and transport networks starting from lunar resources. [...] subsequently permanent settlement can take place by Man “(Schrunk et al., 2008, back cover).In 2014, a prize of $ 3.15 million is set aside for NASA’s 3D-printed Habitat Chal-lenge. The international competition promotes the development of new additive
manufacturing technologies for the construction of housing modules on Mars with semi-autonomous systems. This competition aims to bring out new creative approaches from academic research institutions and technological entrepreneurial realities for aerospace. Divided into 3 main phases with intermediate sub-levels, it ended in 2018.The case study subsequently analyzed lays the groundwork for the international collaboration of 2017 between the D.RE.A.M. FabLab and the Israeli Bubble Base team[9] for the construction of a robotic system for basaltic material extrusion.The team is founded by components with very different backgrounds: the Arch. Helen Wexler, director of The Jnext Hi-Tech and Entrepreneurship Program at the Jerusalem Development Authority graduated from the Bezalel Academy of Art and Design where she teaches Technology Paradigms in Architecture, Lior Aharoni, researcher in matter theory, mechanical engineering , design of algorithms and artificial intelligence; Dr. Roy Naor specializes in planetary geochemistry at the Weizmann Institute of Science.The first phase of the competition involved the formulation of a mineral mixture compatible with the elements of Martian sand, suitable for additive manufacturing by layer deposition.The second phase required the design and implementation of autonomous systems designed to build architectural demonstration elements with dimensional and structural specifications according to the ASTM C39 standard.In this phase of the competition the team was looking for new partners and resources to enable the development of the project, as well as experts in the indus-trial and manufacturing field.As an external consultant, G. Paduano of the D.RE.A.M. FabLab has dealt with small-scale tests with the LDM Wasp Extruder kit. Subsequently the experiment was scaled to the required dimensions with a custom extruder for industrial robotic arms.The control software was developed with KUKA-prc and in C #, for the optimization of the trajectories and the dosage of material.The team conducted the experiments at the Autodesk headquarters in Tel Aviv where it was possible to take advantage of industrial robotic arms and 3D printers equipped with high volumes of work. It has been possible to implement a beam, a column and a truncated cone as required by the regulation through additive 3D techniques with autonomous systems in Mars-like sand.The first specimen made was a column, simplified in the geometry of a cylinder, with dimensions of 160 mm in diameter and 320 mm in height. In a second instance the beam specimen was made first, with dimensions of 150 x 150 x 700 mm, then the truncated cone, also 320 mm high, with the bases of diameter 100 and 200 mm.Subsequently the materials produced were sent to the University of Bradley where the NASA commission met for the final evaluation.The outcome was positive for the qualification for the subsequent phases, acknowl-edging the merit of the team for the innovative solution adopted.
109108 MakeDesign and Technologies
Towards a conscious digital design processThe experiments reported in this document represent applications experiences of generative design principles through robotic manufacturing processes and the evolu-tion of the designer and project team’s skills.The real point of interest of the debate is not so much the role that technology has and will have in manufacturing / architectural applications, but rather the role of the designer.In this regard, the words of Dell’Endice, Odaglia and Gramazio are significant:
The aim of the current research [...] is not to speed up known processes, nor to reduce costs, but to evaluate the growth of the skills in the figures involved, investing archi-tecture, engineering, manufacturing techniques, design computational, computer programming and robotics. It has also been shown that the achievement of an effec-tive result in such an interdisciplinary field is inseparable from the full knowledge, by each involved actor, of all the present problems. (2017, p. 43)
“We design processes to process designs”.
References
> Baule, G., & Caratti, E. (2016). Design è Traduzione. Il paradigma traduttivo per la cultura del progetto. De-sign e Traduzione: un manifesto. Milano: FrancoAngeli. > Carpo, M. (2017). The Second Digital Turn: Design Beyond Intelligence. Cambridge (Mass.), USA: The MIT Press. > Daas, M., & Wit, A.J. (2018). Towards Robotic Archi-tecture. New York: ORO Editions. > Dell’Endice, A., Odaglia, P., & Gramazio, F. (2017). Prefabbicazione rodotizzata e innovazione: MD Jour-nal. Design Parametrico, N. 3, 42-55. > Figliola, A. (2018). Post-industrial robotics: es-plorazione di architetture informate nell’era post-digitale. (2017, 15 june) Retrieved from https:// www.researchgate.net/publication/320372631_ Post-indus-trial_robotics_exploring_informed_ architectures_in_the_postdigital_era > Gaiani, M. (2016). Progettazione Digitale. (2016, 15 october). Retrieved from http://www.treccani.it/enci-clopedia/ progettazione-digitale_%28XXI-Secolo%29> Kohler, M., Gramazio, F., & Willmann, J. (2014). The Robotic Touch: How Robots Change Architecture. Zurigo: Park Books. > Langella, C., Scodeller, D., Del Buono, V. (2017). Design Parametrico e Generativo: nuove prospettive di ricerca: MD Journal. Design Parametrico, No. 3, 6-13.
> Lindsey, B. (2002). Ghery digitale. Resistenza mater-iale/costruzione digitale. Torino: Testo & Immagine. > Mencagli, P. (2015). Le mutazioni dell’involucro architettonico. (2015, 24 august). Retrieved from https://www.ingenio-web.it/4259-le-mutazioni-dellin-volucro-architettonico > Negroponte, N. (1969). Toward a Theory of Archi-tecture Machines. Journal of Architectural Education, Vol. 23, No. 2, 9-12. > Negroponte, N. (1973). The Architecture Machine: Toward a More Human Environment. Cambridge (Mass.), USA: The MIT Press. > Preta, L., Bruner, J.S., Ceruti, M., Davies, P., Feyere-bed, P., Giorello, G., Gould, S.J., Holton, G.J., & Thom, R. (1992). Immagini e metafore della scienza. Roma-Bari: Laterza. > Schrunk, D., Sharpe, B., Cooper, B., & Thangavelu, M. (2008). The Moon. Resources, Future Development and Settlement. Chichester, UK: Praxis Publishing Ltd. > Steenson, M.W. (2017). Architectural Intelligence. How Designers and Architects Created the Digital Landscape. Cambridge (Mass.), USA: The MIT Press. > van der Pijl, P., Lokitz, J., & Solomon, L.K. (2017). Design is a better business. New tools, skills, and mindset for strategy and innovation. Milano: Fran-coAngeli.
[1] In the IT sector, these types of software that use computer graphics and programming languages, to support the design activity of both virtual and real artefacts, are called with the English acronym CAD: Computer-Aided Design, that is “computer aided design”.[2] For further information consult: http://www.cittadellascienza.it/d Regionsfablab/dream-fablab/[3] Founded in 2010 by S. Brell-Cokan and J. Braumann, as a spin-off of the University of Technology in Vienna, it aims to make industrial robots accessible to the creative industry, artists, designers and architects , sharing ideas, research results and technological developments. For further information, please visit: https://www.robotsinarchitecture.org/kuka-prc[4] For further information see: Penelope Pavillon - KUKA prc fabrication. Retrieved from https://www.youtube.com/watch?v=Hht-7QaMmMw[5] For further information consult: cittadellasienza.it/futuroremoto/[6] Stefan Rutzinger, founding partner of Soma Architecture, has been recognized worldwide for his continuous research in digital design and manufacturing strategies, receiving several awards, including the Austrian Building 2006 award, the recognition for experimental trends in architecture 2008 and the MAK-Schindler 2008 scholarship. His avant-garde experimentation is exemplified in spectacular construction projects such as the Theme Pavilion created for Expo 2012 in South Korea.[7] For more information see: www.3dwasp.com[8] SpaceX: US aerospace company based in Hawthorne (California), USA. Established in 2002 by the co-founder of PayPal and Tesla Motors CEO Elon Musk with the aim of creating technologies to reduce the costs of access to space and allow the colonization of Mars.[9] For further information, please consult: NASA’s 3D Printed Habitat Challenge on Mars. Retrieved from https://www.youtube.com/watch?v=_odqZ5-7cxs
Makegallery
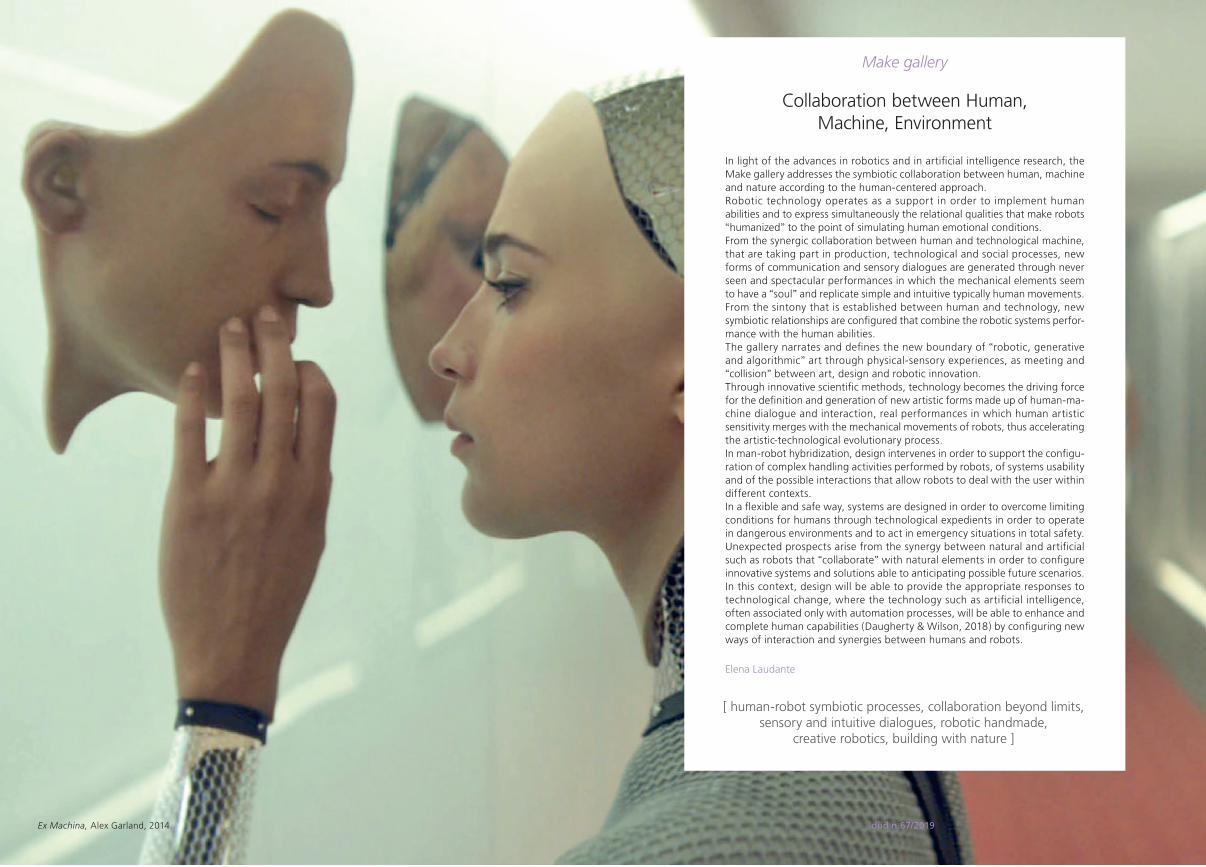
Elena Laudante
diid n.67/2019
Make gallery
Ex Machina, Alex Garland, 2014.
Collaboration between Human, Machine, Environment
In light of the advances in robotics and in artificial intelligence research, the Make gallery addresses the symbiotic collaboration between human, machine and nature according to the human-centered approach.Robotic technology operates as a support in order to implement human abilities and to express simultaneously the relational qualities that make robots “humanized” to the point of simulating human emotional conditions.From the synergic collaboration between human and technological machine, that are taking part in production, technological and social processes, new forms of communication and sensory dialogues are generated through never seen and spectacular performances in which the mechanical elements seem to have a “soul” and replicate simple and intuitive typically human movements.From the sintony that is established between human and technology, new symbiotic relationships are configured that combine the robotic systems perfor-mance with the human abilities.The gallery narrates and defines the new boundary of “robotic, generative and algorithmic” art through physical-sensory experiences, as meeting and “collision” between art, design and robotic innovation.Through innovative scientific methods, technology becomes the driving force for the definition and generation of new artistic forms made up of human-ma-chine dialogue and interaction, real performances in which human artistic sensitivity merges with the mechanical movements of robots, thus accelerating the artistic-technological evolutionary process.In man-robot hybridization, design intervenes in order to support the configu-ration of complex handling activities performed by robots, of systems usability and of the possible interactions that allow robots to deal with the user within different contexts.In a flexible and safe way, systems are designed in order to overcome limiting conditions for humans through technological expedients in order to operate in dangerous environments and to act in emergency situations in total safety. Unexpected prospects arise from the synergy between natural and artificial such as robots that “collaborate” with natural elements in order to configure innovative systems and solutions able to anticipating possible future scenarios. In this context, design will be able to provide the appropriate responses to technological change, where the technology such as artificial intelligence, often associated only with automation processes, will be able to enhance and complete human capabilities (Daugherty & Wilson, 2018) by configuring new ways of interaction and synergies between humans and robots.
[ human-robot symbiotic processes, collaboration beyond limits, sensory and intuitive dialogues, robotic handmade,
creative robotics, building with nature ]
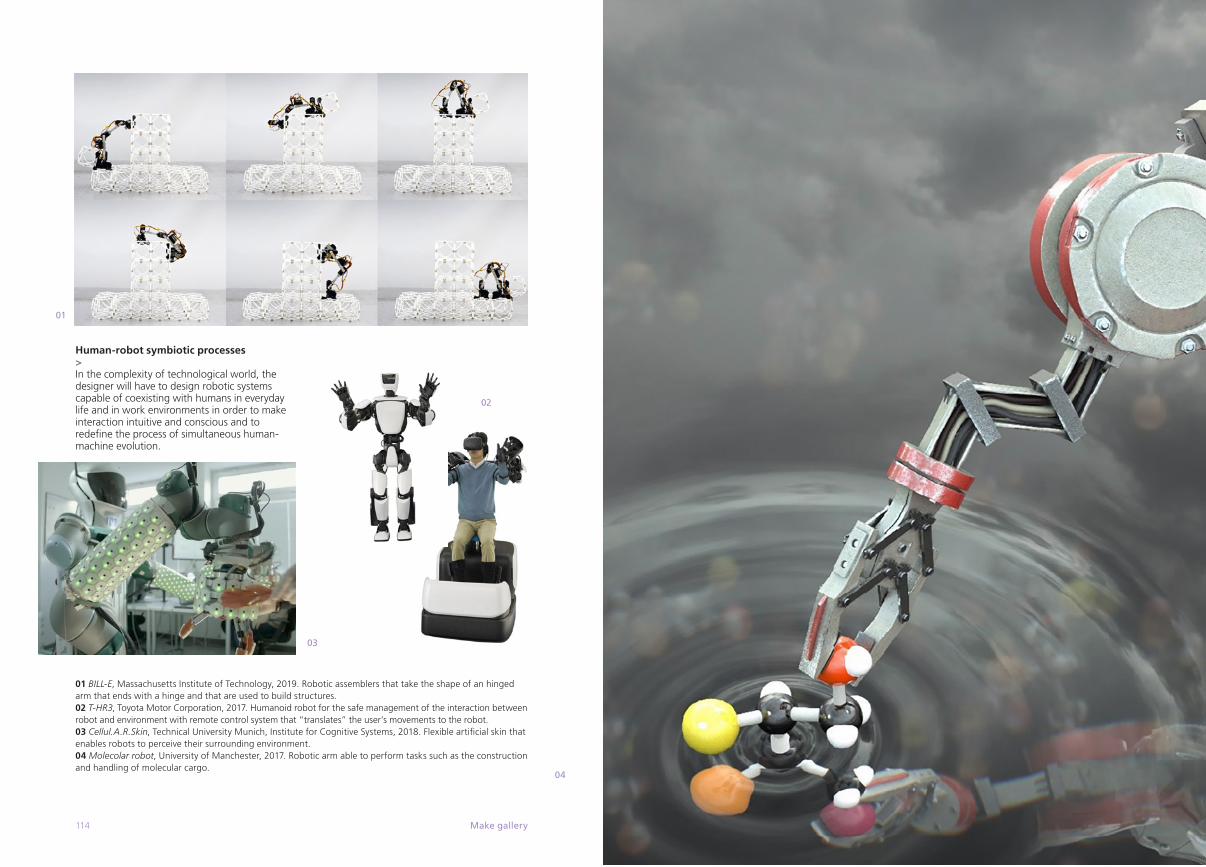
114
01
02
03
Make gallery
04
01 BILL-E, Massachusetts Institute of Technology, 2019. Robotic assemblers that take the shape of an hinged arm that ends with a hinge and that are used to build structures.02 T-HR3, Toyota Motor Corporation, 2017. Humanoid robot for the safe management of the interaction between robot and environment with remote control system that “translates” the user’s movements to the robot.03 Cellul.A.R.Skin, Technical University Munich, Institute for Cognitive Systems, 2018. Flexible artificial skin that enables robots to perceive their surrounding environment.04 Molecolar robot, University of Manchester, 2017. Robotic arm able to perform tasks such as the construction and handling of molecular cargo.
Human-robot symbiotic processes> In the complexity of technological world, the designer will have to design robotic systems capable of coexisting with humans in everyday life and in work environments in order to make interaction intuitive and conscious and to redefine the process of simultaneous human-machine evolution.
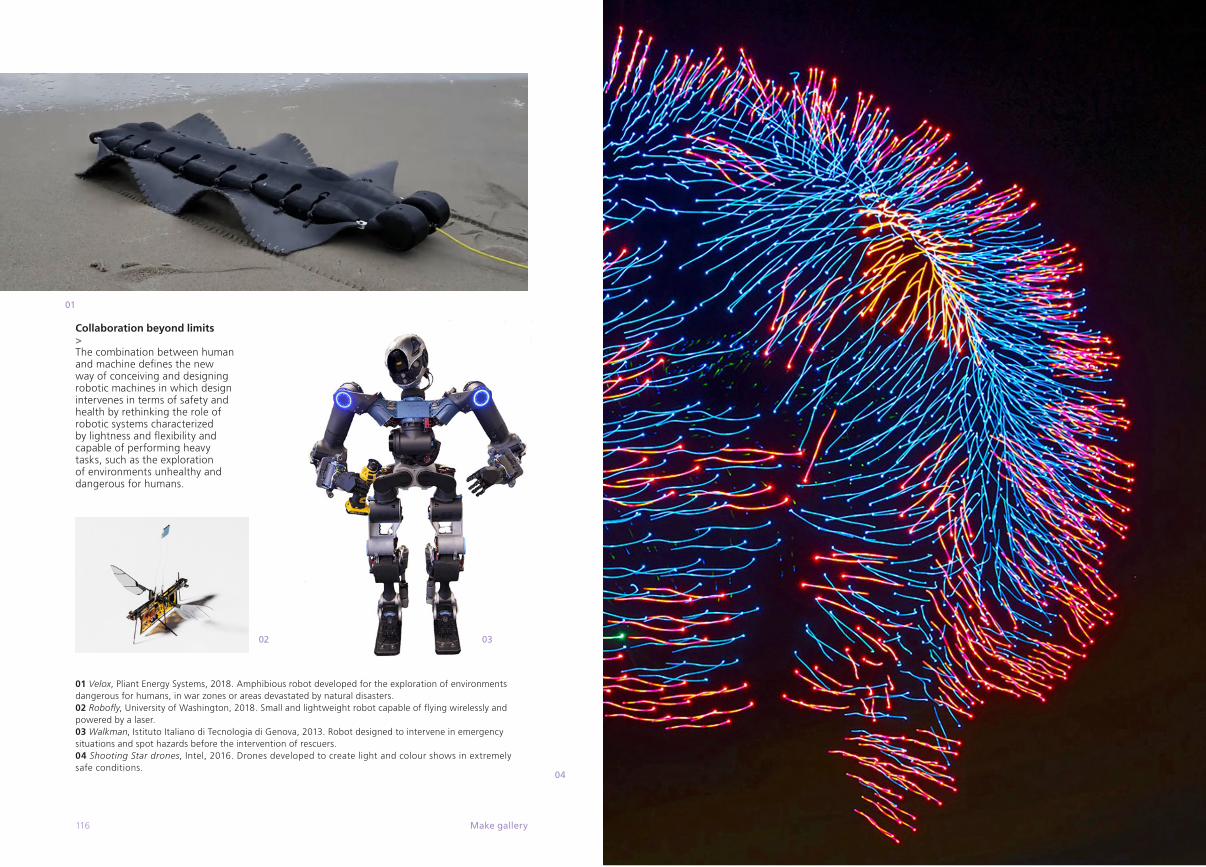
116
01
02 03
Make gallery
04
01 Velox, Pliant Energy Systems, 2018. Amphibious robot developed for the exploration of environments dangerous for humans, in war zones or areas devastated by natural disasters.02 Robofly, University of Washington, 2018. Small and lightweight robot capable of flying wirelessly andpowered by a laser.03 Walkman, Istituto Italiano di Tecnologia di Genova, 2013. Robot designed to intervene in emergency situations and spot hazards before the intervention of rescuers.04 Shooting Star drones, Intel, 2016. Drones developed to create light and colour shows in extremely safe conditions.
Collaboration beyond limits> The combination between human and machine defines the new way of conceiving and designing robotic machines in which design intervenes in terms of safety and health by rethinking the role of robotic systems characterized by lightness and flexibility and capable of performing heavy tasks, such as the exploration of environments unhealthy and dangerous for humans.
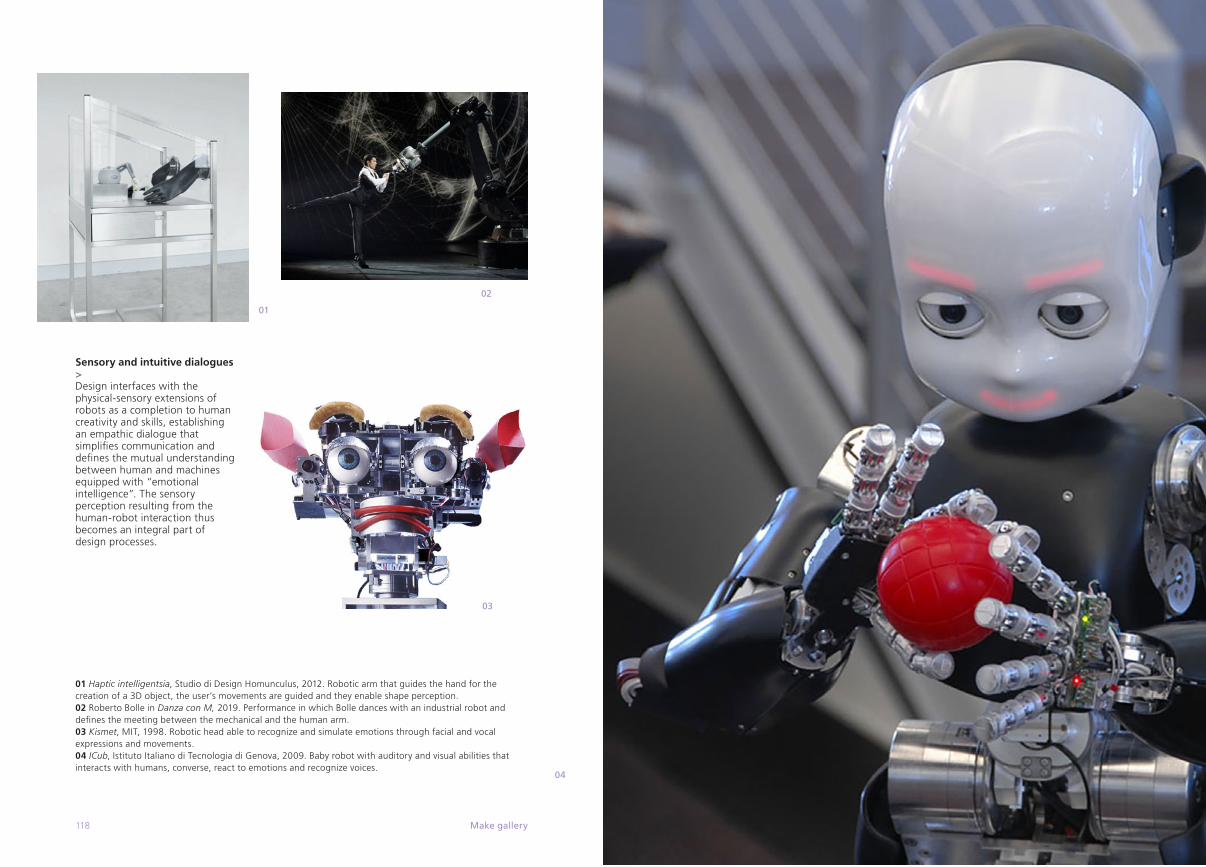
118 Make gallery
04
01
02
03
01 Haptic intelligentsia, Studio di Design Homunculus, 2012. Robotic arm that guides the hand for thecreation of a 3D object, the user’s movements are guided and they enable shape perception.02 Roberto Bolle in Danza con M, 2019. Performance in which Bolle dances with an industrial robot and defines the meeting between the mechanical and the human arm.03 Kismet, MIT, 1998. Robotic head able to recognize and simulate emotions through facial and vocal expressions and movements.04 ICub, Istituto Italiano di Tecnologia di Genova, 2009. Baby robot with auditory and visual abilities that interacts with humans, converse, react to emotions and recognize voices.
Sensory and intuitive dialogues> Design interfaces with the physical-sensory extensions of robots as a completion to human creativity and skills, establishing an empathic dialogue that simplifies communication and defines the mutual understanding between human and machines equipped with “emotional intelligence”. The sensory perception resulting from the human-robot interaction thus becomes an integral part of design processes.
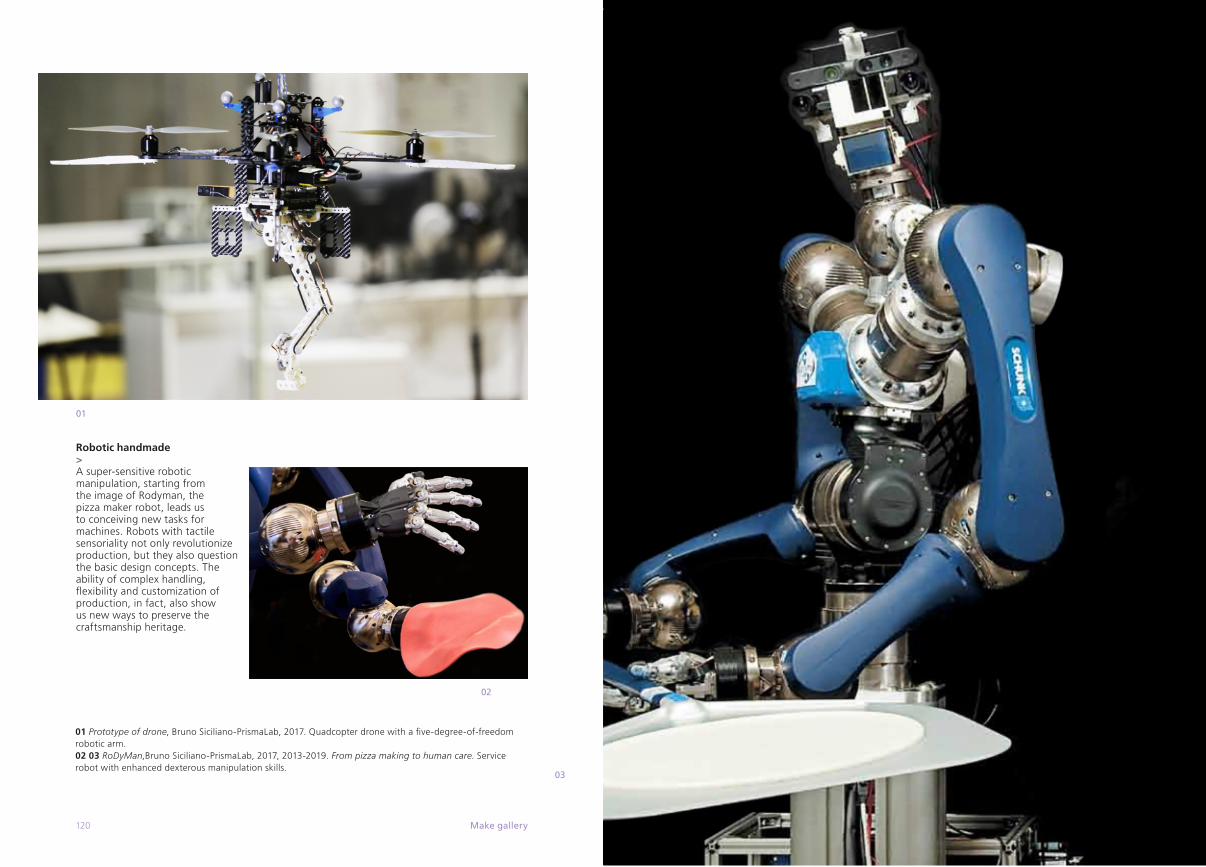
120 Make gallery
02
03
01
01 Prototype of drone, Bruno Siciliano-PrismaLab, 2017. Quadcopter drone with a five-degree-of-freedom robotic arm.02 03 RoDyMan,Bruno Siciliano-PrismaLab, 2017, 2013-2019. From pizza making to human care. Service robot with enhanced dexterous manipulation skills.
Robotic handmade> A super-sensitive robotic manipulation, starting from the image of Rodyman, the pizza maker robot, leads us to conceiving new tasks for machines. Robots with tactile sensoriality not only revolutionize production, but they also question the basic design concepts. The ability of complex handling, flexibility and customization of production, in fact, also show us new ways to preserve the craftsmanship heritage.
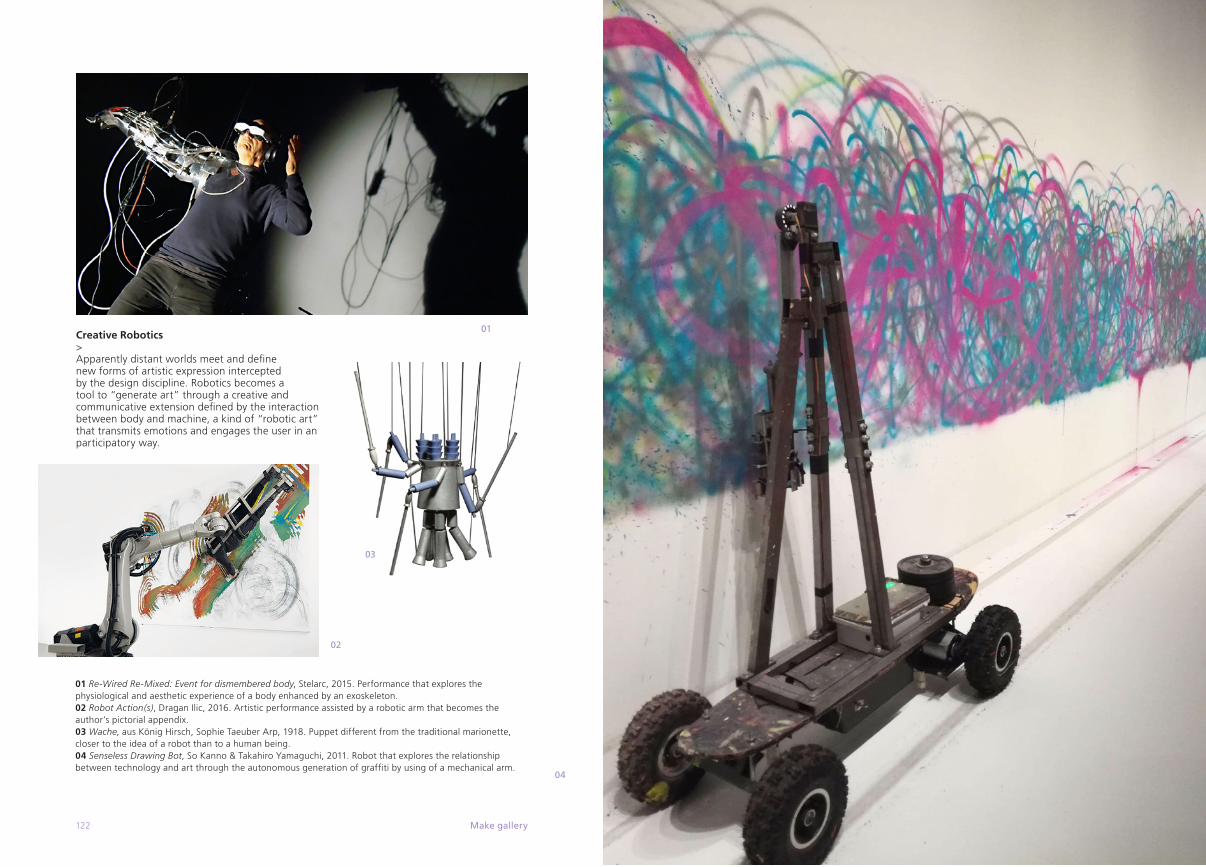
122 Make gallery
03
04
01
02
01 Re-Wired Re-Mixed: Event for dismembered body, Stelarc, 2015. Performance that explores the physiological and aesthetic experience of a body enhanced by an exoskeleton.02 Robot Action(s), Dragan Ilic, 2016. Artistic performance assisted by a robotic arm that becomes the author’s pictorial appendix.03 Wache, aus König Hirsch, Sophie Taeuber Arp, 1918. Puppet different from the traditional marionette, closer to the idea of a robot than to a human being.04 Senseless Drawing Bot, So Kanno & Takahiro Yamaguchi, 2011. Robot that explores the relationship between technology and art through the autonomous generation of graffiti by using of a mechanical arm.
Creative Robotics> Apparently distant worlds meet and define new forms of artistic expression intercepted by the design discipline. Robotics becomes a tool to “generate art” through a creative and communicative extension defined by the interaction between body and machine, a kind of “robotic art” that transmits emotions and engages the user in an participatory way.
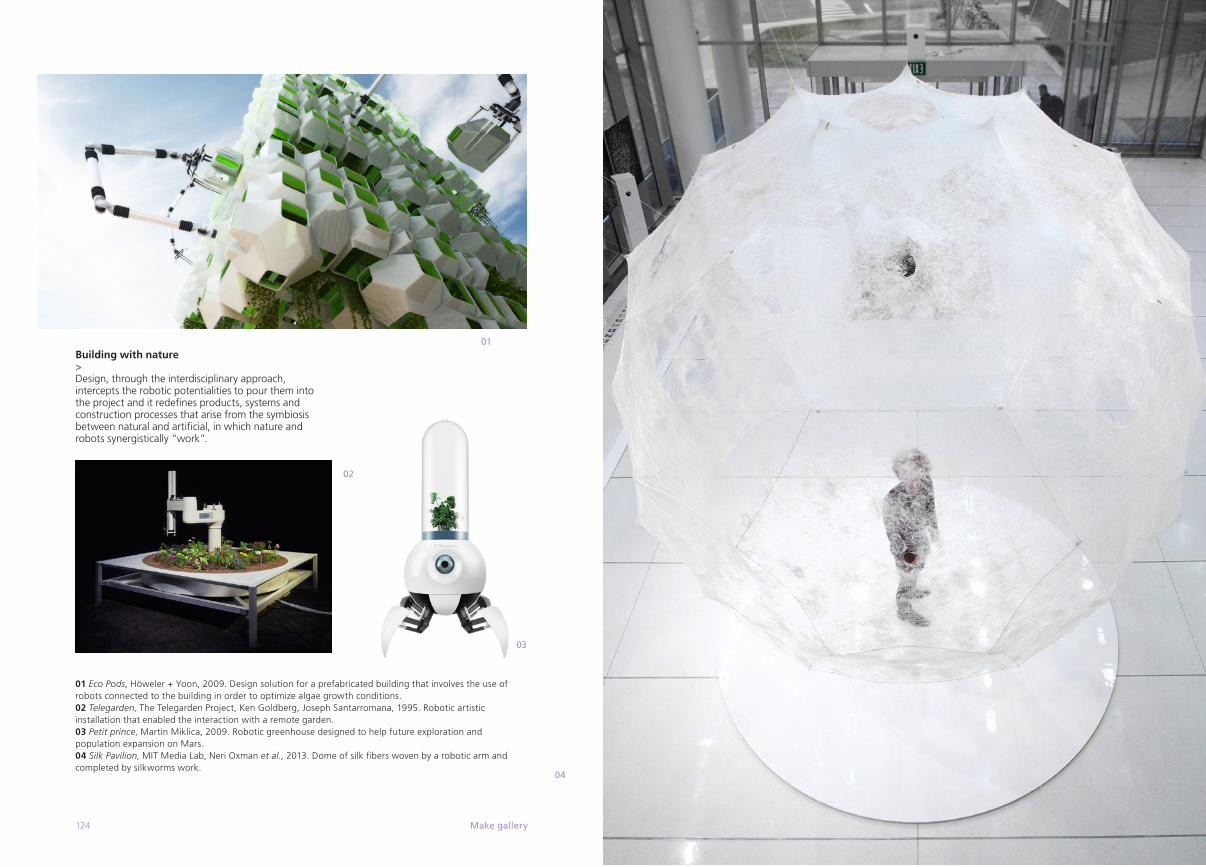
124 Make gallery
03
04
01
02
01 Eco Pods, Höweler + Yoon, 2009. Design solution for a prefabricated building that involves the use of robots connected to the building in order to optimize algae growth conditions.02 Telegarden, The Telegarden Project, Ken Goldberg, Joseph Santarromana, 1995. Robotic artistic installation that enabled the interaction with a remote garden.03 Petit prince, Martin Miklica, 2009. Robotic greenhouse designed to help future exploration and population expansion on Mars.04 Silk Pavilion, MIT Media Lab, Neri Oxman et al., 2013. Dome of silk fibers woven by a robotic arm and completed by silkworms work.
Building with nature> Design, through the interdisciplinary approach, intercepts the robotic potentialities to pour them into the project and it redefines products, systems and construction processes that arise from the symbiosis between natural and artificial, in which nature and robots synergistically “work”.

Focus
Focus gallery > p.160/p.175
Gianluca Carella, Venanzio Arquilla, Francesco Zurlo, Maria Cristina Tamburello
Flaviano Celaschi, Giorgio Dall’Osso
Fabrizio Valpreda, Marco Cataffo
Matteo Zallio
Phygital experiences design
Pre-cyborg, time for the technological foot
Human-Machine Co-Living
Design, emotions and wearable devices
129Focus
Gianluca Carella, Venanzio Arquilla, Francesco Zurlo, Maria Cristina Tamburello
> [email protected] [email protected] [email protected] [email protected]
Focus
diid n.67/2019
The culture in human-machine interactionIn a world where breakthrough technologies will continue to create new value and transform experiences for business and consumers alike, there are quite a few trends that are happening already. Technology is becoming more and more the protagonist, and the transformations coming from it require a redefinition of products, experi-ences and processes of interaction to be fully applied.On one side, everything seems to become intelligent (or smart) and digital, on the other new features inherent in products and environments allow new forms of interaction. In this scenario, driven by rapid technological developments, for designers, it is important to understand how to create new meaningful experiences and new dialogues between humans and machines, two entities that increasingly find them-selves interacting and dialoguing.Inside an “user-centered” approach influenced by the new development of technology, seems more and more important to position the users at the center of the process: “but how is it possible to do it? And which are the related implications?”The interaction between humans and machines, when it is not just through a monitor (which create a flat interaction), opens to new dynamics that take into account and that are influenced by the culture of an individual. Languages, gestures change and personalize the way people and machines interact. Considering the design of the inter-action, and in particular in the phygital ones, an understanding of the cultural values of different users is required. This is because the dialogue between human and machine is particularly amplified and a flat interaction valid for all is no longer acceptable.For this reason, the research started from an analysis of the cultural dimension: “What is culture? How does it characterize each individual? What happens in accul-turation phenomena when different cultures meet?”; then the research moved on to define the interaction and implications that culture generates on it when human and machine meet; finally, after the analysis phase, a set of aspects to be taken into consideration in the design of phygital interactions were developed.
Theoretical references CultureThe word culture has a Latin derivative, which refers to the tilling of the soil. The culture is shared with and acquired by people who live in the same social environ-ment and for this reason, is defined as part of a collective phenomenon. In humans, it is learned, not innate: it is the result of many actions (micro and macro) that each person does during their life. Hofstede (1997) argue that culture “should be distinguished from human nature on one side and from an individual’s personality on the other, although exactly where the borders lie between nature and culture, and between culture and personality, is a matter of discussion among social scientists”.
In today fast-changing environment, ruled by the evolution of technologies, the designer is asked to act as configurator of an engaging process that sees the interaction between two main protagonists of these transformations: humans and machines. To do this, is important to understand how to mix physical and digital processes inside a new dimension that is emerging more and more: the phygital one.The investigation underlined the need to consider the cultural dimension as one of the main drivers that influence the interac-tion between humans and machines. The cultural research was conducted among three dimensions: the physical, the digital and the phygital one.In the physical dimension the cultural component appears to be evident; in the digital one was strongly reduced; finally, for the phygital dimension, the cultural component seems will play a major role.The investigation, through case studies analysis, leads to noticing that inside this new kind of interaction is important to reposition the user at the center of the process. The interaction between users and machines takes on different and unexpected combinations, considering that the technology is embedded in products and spaces. In fact, these seem to be more robotic due to the increasingly amplified technological component. With new technologies, the structure almost disappears, the technological components are mostly embedded, and the communicative and interactive elements increase. This will use different formats and will follow new rules in relation to a renewed way of use and a different acceptance by users.By exploring the main aspects that a designer should take into account in designing phygital experiences, the aim of this paper is to highlight new rules to be considered in this new context.
Phygital experiences design
[ phygital design, interaction design, user experience, cultural design ]
PhD Student, Politecnico di MilanoAssociate Professor, Politecnico di MilanoFull Professor, Politecnico di Milano Researcher, Politecnico di Milano
131130 FocusDesign and Technologies
AcculturationThe term acculturation was used for the first time in 1880 (Powell, cited in Herskovits, 1938), but the first famous formulation was theorized in 1936 from Redfield, Linton, and Herskovits “Acculturation comprehends those phenomena which result when groups of individuals from a different cultural background come into continuous first-hand contact, with subsequent changes”. Young Kim (1988, 2001), one of the main researchers in acculturation, developed an integrated model of cultural adaptation. She emphasizes a stress-adaptation-growth dynamic model that features the cyclic tension of constantly moving forward and drawing back in adaptation growth. Her model features the concepts of deculturation, acculturation, and assimilation: . deculturation is the unlearning of at least some of one’s past cultural elements; . acculturation involves acquiring and learning some of the new cultural practices;
responding at least partially to the pressure of the dominant culture; . assimilation represents the “state of the highest degree of acculturation into the
host milieu and deculturation of the original cultural habits”.
InteractionInteraction design, as discipline, is very difficult to define. Although people daily interact with different entities is not easy to define a common definition of this kind of involvement.Interaction by the CTI reviews (2010) is defined as “the action that occurs as two or more entities have an effect upon one another to produce a new effect [...]”.Goikolea (2013) defines interaction as “the process in the machine that considers the point of the interaction process in which the user is involved at any given moment, and thus reacts to the user’s actions and vice versa”. Interaction designers act as “co-creators of meaning” and “relationship architects”: they choreograph the interactions.The role of the interaction designer, for Bill Verplank (2007), consists in answering three questions: - “How do you do?” consider the affordances the designer has to incorporate in the proposal;- “How do you feel?” consider the feedbacks coming from the system involved in the interaction and the emotional consequences that they produce;- “How do you know?” consider the path that should be shown to the users by the designer in order to help him to know what they are going to do with the product that he is coming in contact with.The interaction design process should focus on users, through ideation and prototyping, and incorporating emotion, drawing on a wide range of inf luences (Saffer, 2009).
The implication of culture inside interactionsPhysical interactionInside The Design of Everyday Things, Donald A. Norman (1988) describes that to design a positive interaction, it is important to consider several principles: . affordance represents the perception of how to use an artifact. For example, menus
suggest the action of choice, and buttons suggest pressing; . conceptual models are mental models of a system, through which users can under-
stand the system and the effects of their actions; . the mapping shows the link between an action that is performed through the
controls and the effects it has on the system. For example, moving the controller to the left should correspond to moving an object on the display to the left;
. the signifier in designing a system makes the conceptual model of the system and the actions they are allowed to take immediately obvious to users;
. the feedback shows the information produced by users' actions.
In designing a “good-designed” artifacts, Norman (1988) suggests that a well-de-signed interaction is recognizable because it allows every time the user to understand what to do, and at the same time give to the user the possibility to tell what is going on.In the research, the importance of the cultural factors that modify and characterize the physical interaction, was analyzed and underlined through the study of a series of values between different countries.The religion, in relation to the different countries, has a diverse influence on everyday life. For instance, in the US it impacts only on one sphere of life, in Japan beliefs guide the entire everyday life and the way of understanding what surrounds people, while in Arab countries the religion conforms people in habits and customs.Finally, one of the most important aspect also during the conceptualization of the interaction and that change according to the cultural sphere is the proxemics. In all the countries considered for the research, with the exception of the Arab world, physical contact between strangers or acquaintances is not welcome and often reduces to a handshake.
Digital interactionThe discussed Norman’s guidelines (1988) that have been incorporated into the Nielsen Heuristic for User Interface Design (1995), can be extended and adopted also for the digital artifacts. In this study, digital artifacts are referred to the definition of Braman and James (2009):
a designed thing that embraces digitally encoded information content that is displayed on digital media or a combination of digital and physical components. The artifact acts as a materialization of a message while enhancing a perceptual experience on the user's side. (p. 25)
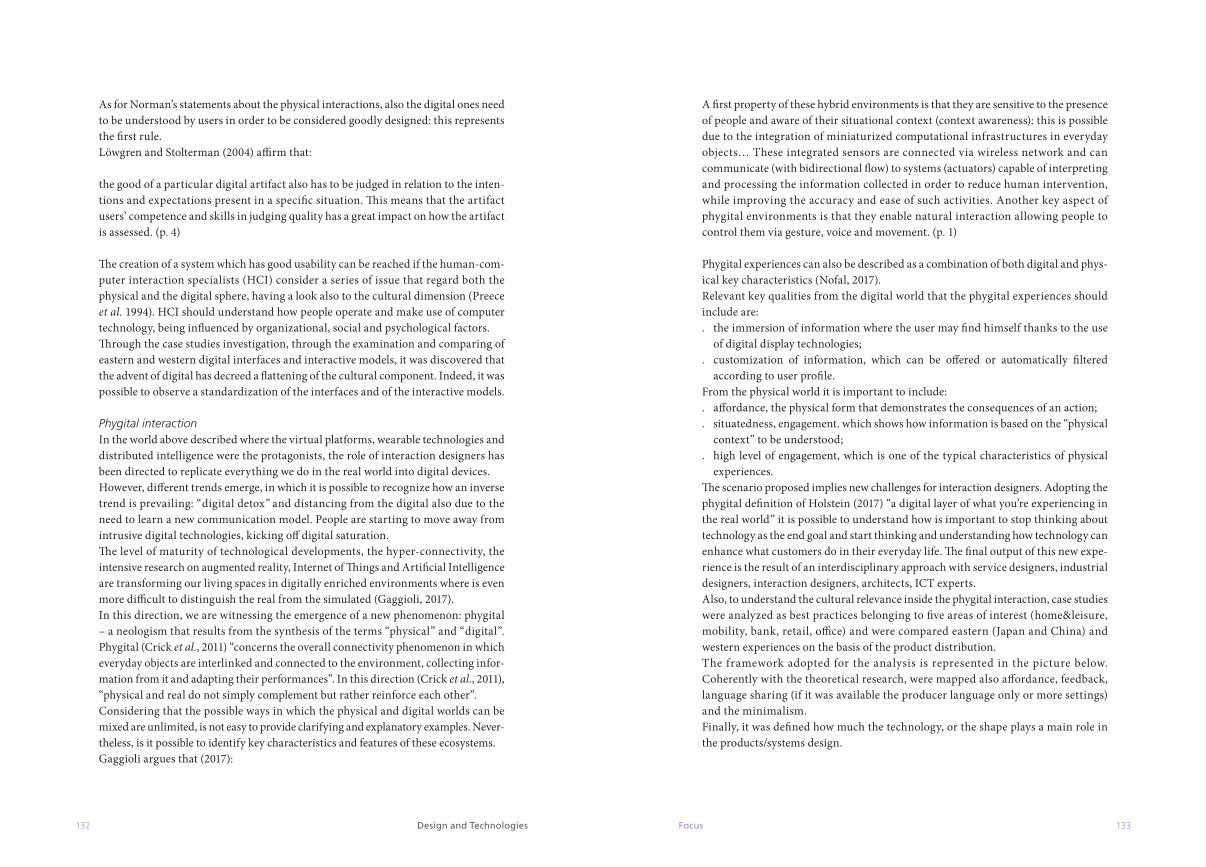
133132 FocusDesign and Technologies
As for Norman’s statements about the physical interactions, also the digital ones need to be understood by users in order to be considered goodly designed: this represents the first rule.Löwgren and Stolterman (2004) affirm that:
the good of a particular digital artifact also has to be judged in relation to the inten-tions and expectations present in a specific situation. This means that the artifact users’ competence and skills in judging quality has a great impact on how the artifact is assessed. (p. 4)
The creation of a system which has good usability can be reached if the human-com-puter interaction specialists (HCI) consider a series of issue that regard both the physical and the digital sphere, having a look also to the cultural dimension (Preece et al. 1994). HCI should understand how people operate and make use of computer technology, being influenced by organizational, social and psychological factors. Through the case studies investigation, through the examination and comparing of eastern and western digital interfaces and interactive models, it was discovered that the advent of digital has decreed a flattening of the cultural component. Indeed, it was possible to observe a standardization of the interfaces and of the interactive models.
Phygital interactionIn the world above described where the virtual platforms, wearable technologies and distributed intelligence were the protagonists, the role of interaction designers has been directed to replicate everything we do in the real world into digital devices. However, different trends emerge, in which it is possible to recognize how an inverse trend is prevailing: “digital detox” and distancing from the digital also due to the need to learn a new communication model. People are starting to move away from intrusive digital technologies, kicking off digital saturation.The level of maturity of technological developments, the hyper-connectivity, the intensive research on augmented reality, Internet of Things and Artificial Intelligence are transforming our living spaces in digitally enriched environments where is even more difficult to distinguish the real from the simulated (Gaggioli, 2017). In this direction, we are witnessing the emergence of a new phenomenon: phygital – a neologism that results from the synthesis of the terms “physical” and “digital”. Phygital (Crick et al., 2011) “concerns the overall connectivity phenomenon in which everyday objects are interlinked and connected to the environment, collecting infor-mation from it and adapting their performances”. In this direction (Crick et al., 2011), “physical and real do not simply complement but rather reinforce each other”.Considering that the possible ways in which the physical and digital worlds can be mixed are unlimited, is not easy to provide clarifying and explanatory examples. Never-theless, is it possible to identify key characteristics and features of these ecosystems.Gaggioli argues that (2017):
A first property of these hybrid environments is that they are sensitive to the presence of people and aware of their situational context (context awareness): this is possible due to the integration of miniaturized computational infrastructures in everyday objects… These integrated sensors are connected via wireless network and can communicate (with bidirectional flow) to systems (actuators) capable of interpreting and processing the information collected in order to reduce human intervention, while improving the accuracy and ease of such activities. Another key aspect of phygital environments is that they enable natural interaction allowing people to control them via gesture, voice and movement. (p. 1)
Phygital experiences can also be described as a combination of both digital and phys-ical key characteristics (Nofal, 2017). Relevant key qualities from the digital world that the phygital experiences should include are: . the immersion of information where the user may find himself thanks to the use
of digital display technologies; . customization of information, which can be offered or automatically filtered
according to user profile.From the physical world it is important to include: . affordance, the physical form that demonstrates the consequences of an action; . situatedness, engagement. which shows how information is based on the “physical
context” to be understood; . high level of engagement, which is one of the typical characteristics of physical
experiences. The scenario proposed implies new challenges for interaction designers. Adopting the phygital definition of Holstein (2017) “a digital layer of what you’re experiencing in the real world” it is possible to understand how is important to stop thinking about technology as the end goal and start thinking and understanding how technology can enhance what customers do in their everyday life. The final output of this new expe-rience is the result of an interdisciplinary approach with service designers, industrial designers, interaction designers, architects, ICT experts.Also, to understand the cultural relevance inside the phygital interaction, case studies were analyzed as best practices belonging to five areas of interest (home&leisure, mobility, bank, retail, office) and were compared eastern (Japan and China) and western experiences on the basis of the product distribution. The framework adopted for the analysis is represented in the picture below. Coherently with the theoretical research, were mapped also affordance, feedback, language sharing (if it was available the producer language only or more settings) and the minimalism.Finally, it was defined how much the technology, or the shape plays a main role in the products/systems design.
135134 FocusDesign and Technologies
As output, it was noticed the dominant role of technology in the definition and design of the product/system. Differently from the outputs of previous research, the differences between products coming from different geographical areas disappear. Moreover, high-level experiences in term of affordance, feedback and minimalism are offered. The cultural component seems to play and will play a major role.
How to design acculturated phygital experiencesIn this new perspective, where the technology is no more the main protagonist, it is clear how much is important to reposition the user in the middle of the experience design, considering also their culture. The following graph describes the main drivers and elements to consider in designing a phygital experience, in order to accomplish this aim.Indeed, in this scenario, the user, who plays a new role, is required to interact, in a phygital dimension, with spaces and objects changing functions thanks to the possi-bilities allowed by technological developments.Here, the technology is embedded in products and spaces and takes on different and unexpected combinations when it comes into contact, when it interacts with users more and more often through miniaturized technological components (the engine is in the wheels) and increased communicative elements.All this must be designed from an ethical, aesthetic, conversational and above all from a cultural point of view. It is necessary to understand how to do it and which are the related implications.This research work was carried out for NTT Data, an international technology company, to support them in the transition from an exclusively technological perspective to one that takes into consideration a design perspective. The intent of the guidelines was to transfer the value of a new cultural dimension to their employees.Ethical implications: . adopt a user center perspective. Users shape the experience, with their knowledge
and culture, in this way the system become phygital adopting the third dimension (physical, digital and user-oriented). Users are the main driver of the process, while technology recognizes and adapts itself to them and not vice versa as often happens;
. declare both the role and the orientation of the technology. Adopting a process of feedforward, the user should easily understand the status and the adaption made by the system with a physical or digital evident feedback.
Aesthetical implications: . qualify the aesthetical implication. It is important to underline in a qualitative way
the aesthetical implication both form the interface and the architecture following the Rams principle from as little design as possible (Lovel, 2011);
. allow new forms of physicity. The physical evidence of products and systems become more and more relevant (McKinsey, 2017), so phygital spaces need new forms of mixed physicality where objects activate digital relations;
. make technology disappeared. Technology, aesthetically integrated and hidden in the products, will have to give the technological environment a humanized perspective.
Conversational implications: . use the right tone of voice. Every culture needs a different and specific interface
that the system should include; . be conversational. It must be conversational in both linguistic and interaction
models, adapting to different users.Cultural implication: . adapt the interaction to the cultural context. The technology has to be ready to
adapt the physical and the digital format to the user’s cultural context; . adopting the ritual dimension. Each culture provides specific sequences of use that
are self-explanatory for users coming from that culture. Adopting the ritual dimen-sion can be a different way to interact and to engage the users in the processes;
. provide for interconnection. The digital world can vary from a collectivity dimen-sion to a personal one and vice versa. In the next future, the importance of personal devices in managing the interaction will progressively decrease compared to this new interaction opportunities.
References
> Breschi, R. (2017). The expanding role of design in creating an end-to-end customer experience. McKinsey. > Gaggioli, A. (2017). Phygital Spaces: When Atoms Meet Bits. Cyberpsychology, Behavior, and social Networking, 20 (12), 774-774. > Goodwin, K. (2009). Designing for the Digital age. How to create human-centered product and services. Indianapolis. IN: Wiley. > Hall, E.T. (1968). La dimensione nascosta. Roma: Armando. > Hartson, H.R., & Pyla, P.S. (2018). The Ux book: process and guidelines for ensuring a quality user experience. Amsterdam: Morgan Kaufmann. > Hiraki, T., Fukushima, S., & Naemura, T. (2016). Phygital Field: an integrated field with a swarm of Physical robot and Digital images. Paper presented at Siggraph Asia 2016 Emerging Technologies. Siggraph 2015 Posters: Siggraph ‘15 Acm.> Hofstede, G. (1997). Cultures and Organizations: Software of the Mind. New York: McGraw-Hill. > Issa, T., & Isaias, P. (2015). Usability and Human Computer Interaction (HCI). Sustainable Design. 19-36. > Lakey, P.N. (2003). Acculturation: a review of literature. Intercultural Communication Studies. 12, 111-126. > Lovell, S. (2011). Dieter Rams: As Little Design as Possible. London: Phaidon Press Limited. > Lupetti, M.L., Rossetto F., & Piumatti G. (2015). Phygital Play. HRI in a new gaming scenario. Paper pre
sented at 7th International Conference on Intelligent Technologies for Interactive Entertainment. IEEE > Marcus, A., & Gould, E.W. (2000). Crosscurrents: Cultural Dimensions and Global Web User-Interface Design. Interaction, 7(4), 32-46. > Milgram, P., & Kishino, A. F. (1994) Taxonomy of Mixed Reality Visual Displays. IEICE Transactions on Information and Systems, 12(12), 1321-1329. > Moggridge, B. (2007). Designing interactions. Cambridge (Mass.), USA: The MIT Press. > Nakazawa, J., & Tokuda, H. (2007). Phygital Map: Accessing Digital Multimedia from Physical Map. Paper presented at AINAW ’07. 21st International Conference on Advanced Information Networking and Applications Workshops. Canada: IEEE > Nielsen, J., & Loranger, H. (2010). Web usability 2.0: l’usabilitache conta. Milano: Apogeo. > Nofal, E., Reffat, R.M., & Vande Moere, A. (2017). Phygital Heritage: an approach for heritage communication. Paper presented at Third Immersive Learning Research Network Conference. > Norman, D.A. (2013). The design of everyday things. Cambridge (Mass.), USA: The MIT Press. > Saffer, D. (2010). Designing for interaction: creating innovative applications and devices. Berkeley, CA: New Riders. > Saffer, D. (2014). Microinteractions-Designing with details, O’Reilly. s.n.

137Focus
Focus
Flaviano Celaschi, Giorgio Dall’Osso
> [email protected] [email protected]
diid n.67/2019
Technology and intentional modification of the bodyHomo sapiens has intentionally modified his body ever since (Fimiani, 1984, p. 139, 2000; Renfrew, 2011; Diamond, 2013; Galimberti, 2013) he embarked on the evolutionary adventure that led us to the anthropocene, the contemporary age characterized by absolute dominance over the Earth. The intentional modification of the body is a strongly integrated system of actions, perceptions and thoughts. Their outcome, empowering or self-destructive, does not follow the line of progress from a caveman to a contemporary being, with immense intelligence and potential, but it is of an evolutionary adaptive type. This is a continuous demonstration that the raw material on which creativity and intelligence are exercised is our own body which, in terms of design culture, should be understood as a training ground for plasticity and morphology (von Foerster, 1987; Caffo & Marchesini, 2014).All the techniques that homo sapiens has encountered along the way, from fire to digital, have contributed to the process of self-formation and self-determination (Vergine, 2015; Celaschi, 2017). What we value in terms of change is the speed of absorption and spread of these achievements. In today’s fourth digital revolution we are for the first time able to take advantage of a cluster of information-enabling technologies. These are technologies that favor the acquisition of data to build real-time responsive digital models that go beyond space and time, bringing about a capacity of immediate reaction to the system in which we are immersed. The revo-lutionary scope of these technologies (sensors, big data, additive manufacturing, IOT, IIOT, geolocation, etc.) is their miniaturization, low cost, ease of use and of application that enable them to be diffused.This article can be contextualised within the relationship between the awareness of man to use the intentional manipulation of the body in an adaptive way and the extent to which this attitude is conferred by a planned use of enabling technologies.
The contemporary contextDigital technologies follow a classic path of evolution. They are initially used in fixed and cumbersome artifacts (radios, televisions, transformers, etc.) and then they evolve into portable artefacts. Therefore, they become lighter and decrease in volume until they become accessories. They continue their evolution, penetrating into clothes as wearable technologies, and finally they become increasingly located inside the body or on its direct surface (organic tissues) to end the cycle with biotechnological fusion. The hypothesis we are discussing here is that we are expe-riencing an anomalous phase of the relationship between humans and machine in which, after a difficult diffusion of wearable devices, now the technologies shift rapidly to the foot. However, this is only a transitional phase before the next step, which regards human-machine integration at an epithelial and biotechnological infra-organic level.There are various reasons for the wearable crisis. On the one hand, the traditional structure imbued with symbolic values of fashion has acted as a brake for the adop-
Beyond the ability to adapt the environment to his own needs, a characteristic that has always distinguished homo sapiens is that of modifying himself to adapt to the surrounding environment. The intentional alteration of one’s body for symbolic purposes, such as mnemonics or as an increase in desired performance, involves and gives life to the technology. Technological innovation is therefore step-by-step interpreted through the human body and it has always been related with the body in some way. Even the revolution produced by economic diffusion and the miniaturization of enabling technologies is interpreted here in terms of the ability of contemporary human beings to wear and progressively integrate this technology into the body. In this current state of innovation, particular attention is focused on the foot as a space for the application of technologies. This is thanks to its very particular anatomical and functional characteristics and to those of the devices that historically wrap and protect it. The foot, in this phase, is indicated as a repository of relevant design focuses that follow the attention previously paid to wearable technology and precede those regarding a future in which technology and body will merge into a single organism-perception. The article explains the reasons for this attention to the foot, recalling the studies that analyze the relationship between body movement and perception. The identification of dance as a field of research for the study of the relations between digital technology and the human body, highlights the ways in which the apparatuses designed and applied to the body can influence human actions and therefore the perceptive capacity of reality in which the subjects are immersed. A design review applied to the foot through enabling technologies completes the article and identifies the constants that seem to drive this current trend.
Pre-cyborg, time for the technological foot
[ enabling technologies, human body, design mediation, incorporation, foot ]
Full Professor, Alma Mater Studiorum - University of BolognaPhD Student, Alma Mater Studiorum - University of Bologna
139138 FocusDesign and Technologies
tion of digital technologies in textiles and packaging. On the other hand, the meaning of digital, understood as the sensoring capacity to capture information from the body and its temporary state, works if the sensors are in close contact with the epithelial tissue. Excessive pressure and perspiration, caused by the climate of most inhabited continental countries, have not made it easy to wear the tight bandage that the sensors need to be continuously active. Within this context, the foot assumes a strategic position for various reasons: it is difficult to neglect the use of a protective shoe sole for the sole of the foot, regardless of the climate that the subject lives in. Across the millennia the foot has been traditionally the symbolic, performance-based, and interpretative (oriental finger pressure) terminal of the subject. It is almost a holistic terminal, which connects it to the earth and, at the same time, is a potential place for the gathering of signals coming from the body and the surrounding environment. In the following section we attempt to give an account of this articulated process that is settling on the foot through enabling technologies and that brings together elements that from different points of view converge to testify its centrality and usefulness also for the designer.
Body unit, movement and perceptionThe biologist Stefano Mancuso (Mancuso & Viola, 2015) describes, through a clear and effective slogan, the intelligence of plants. Plants must solve the same survival problems that animal organisms have to face, but they do so without being able to move because they are for the most part rooted in the ground or on the sea bottom. Therefore, paraphrasing Mancuso, we can argue that movement is an important part of the way in which animal organisms resolve their survival, and therefore an impor-tant part of their intelligence. Contemporary science calls this evolutionary bricolage: exaptation (Gould & Vrba, 2008). The results reported by the neurosciences go in the same direction (Ammaniti & Gallese, 2014; Mallgrave, 2015; Manzi, 2017) , according to which every perceptual detection that affects the human brain corresponds to the activation of an element of the motor system. For example, we see food and our sali-vary glands are activated, we are watching a sporting event and our brain activates our muscular apparatus, etc. Movement and perceptive system are permanently inter-connected and interact seamlessly with each other (Maturana & Varela, 1985, 1992).Human perception, mediated by the senses, records the reality of the body and its relations with surrounding entities. The frequent relationship of the body unit, joint element of perception and movement, with reality often deposits in human actions unconscious knowledges in the same way as occurs for the manual skills of artisans (Sennet, 2008) or in the art of professional athletes. Some mechanisms of this knowl-edge, such as movement-memory, perception-action and attentional resources are described by Borghi and Nicoletti (2007, p. 207) and underline the close relationship that movement has in the processes of acquisition of reality. It is also interesting to note how the context becomes a mediator of knowledge for the body, an example is the cognitive mechanism of tact by proxy (Buiatti, 2014) through which the subject
perceives superficial characteristics of something that does not touch, but with which comes into contact through a third element, an example being the case of hand-pencil-sheet.Our body, leaning towards space and activities (Galimberti, 2013), acquires infor-mation and incorporates gestures in a natural and often unconscious way. Studying the ways in which these gestures change with the technology that surrounds us is central to being able to design artifacts that have the objective of being incorporated into us and our daily actions.
Dance as field of extreme experimentation in the relationship between technology and bodyDance is an optimal field of research for the investigation of the relationship between technology and body as it is a staging activity and focusses on the study of move-ments, emphasizing them, hiding them and selecting them. Dance belongs to human expressive modalities and changes the forms surrounding the cultural traditions of peoples. The rules, the stylistic choices and the ornaments that man adds to the dynamics of the body and the relationship of the body with space dictate important changes in expressive possibilities. The Japanese Nô theater, characterized by the hakobi walk technique, shows bodies moving on the stage keeping the foot anchored to the ground. Some Balinese dances require the dancer to keep the toes contracted upwards, with the consequent modification of the posture. Since the Nineteenth Century, European dancers have used reinforced ballet shoes that allow movement on the tip of the toes for a prolonged time (Del Vecchio, 2006).An example in the contemporary theater of body and movement modification is found in the Bauhaus Triadic Ballet of Oskar Schlemmer. This experimental project stages different relational configurations between objects and spaces by modifying the expressive possibilities of the dancers’ bodies (Bistolfi, 1982). Schlemmer subjects the human structure to rigid geometric rules through the design of costumes and pathways designed on stage. One goal of representation is the search for proportion-ality and geometric continuity between body and space. The details of the costumes are in effect restrictions designed to transform the bodies into automatons, free in a constrained expressiveness.Not only do volumes and space influence the dynamics of the body, but technology also intervenes in the movement and perception of space.An experiment carried out during dance exercises at the University of Cotè d’Azur in Nice (Giomi, 2017) is of interest. During the first phase, each girl involved was asked to explore an assigned object by hand and then reproduce the exploration movement in the absence of the object. The dancers finally elaborated and carried out a movement with the whole body that originated from the sensations gathered.During the second phase, two devices were applied on the body of each dancer, associating a given sound with the position in space, detected by means of motion capture technology. In this phase the subjects repeated the same tactile explorations
141140 FocusDesign and Technologies
on the assigned object. These manipulations differ from the previous ones in that the devices instantly associated a sound with a given movement. The sounds generated were therefore a consequence of the tactile exploration movement. In the third and last phase the dancers, with the worn devices, repeated the manipulation movement without the object and elaborated a movement that with the whole body described the tactile experience experienced. In these last two performances the sound, being asso-ciated with the movements, became a guide to refer to in the production of gestures. Sound perception therefore interacted with the mnemonic abilities of the movement in a multimodal perceptive integration.An equally significant piece of research is that of the improvised dance videos of the research group Body and Technology, within the Advanced Virtuality Lab of the Sammy Ofer School of Communication (Landau, 2015). The videos, termed Haptic dance exploratory sessions, feature human figures moving in a closed space. The subjects filmed have vibration actuators applied to their bodies, which send haptic feedback to the subjects themselves, influencing their movement.A significant research project on the dance-technology relationship was that undertaken to make a dance movement accessible to visually impaired spectators (McCormick et al., 2018). The research used motion capture technologies, applied to dancers, associated with a grid of 64 vibrating actuators inserted in the back of the spectator’s armchair. The actuators were had the aim of translating the movements into haptic signals replicating the dancers’ experience. The result obtained was posi-tively evaluated by users and considered to be applicable to a wider range of audiences in order to increase the involvement and perception of the performance experience.The examples show how digital feedbacks associated with human movement are incorporated into the very perception of experiences. This consideration can be the basis for technological projects that wish to grasp the body and have the ambition of shifting on from being merely technological gadgets to being tools for people, aids destined to enter the actions of human life without unbalancing the attention capacities of the users (Zannoni, 2018).
The foot as destination site of technologyThe field of dance research shows how changes in movement, rhythm, repetition and immobility can affect the perception of space and how new digital devices can act as mediators with reality.The themes highlighted are of interest in contexts where enabling technologies become a keystone to improving human life: health, safety at work, postural educa-tion, life in urban space, etc.According to the International Data Corporation, forecasts regarding the market of wearable devices show growth, but there is a high dropout rate after the first six months (Zannoni, 2018). We can therefore say that, as the potentialities found in digital technologies applied to the body are real, the high dropout rate can be traced back to usage problems. It is therefore necessary to identify a further step, not hasty
but certainly urgent, which knows how to move the relationship between technology and body towards an introjected dimension. The pivotal point of this development, a bridge between the present and the future, could be represented by the use of digital technology in the border area par excellence between man and context: the foot.Feet are a part of the body with relevant characteristics in the current wearable application scenario: they are distant from the areas of the body most sensitive to electromagnetic waves such as the brain and genitals. They are the part of the body that is closest to the ground and detect the information of the contexts in which we live. The sole has a high tactile perceptive capacity – detection of minimal differences in thickness, temperature and humidity – (Bentivoglio et al., 2001) and acquires haptic information that is synergistic between touch and proprioception.Finally, it is important to emphasize the peculiar characteristics and potential of footwear, products that have enveloped the feet for millennia (Riello & McNeil, 2007). Footwear has spaces where it is possible to both insert advanced technology without impacting on the human body with volumes applied in sensitive parts (obtained from the distance between the anatomical curves of the foot and the ground) and also to hide the technology irrespective of the shape that houses it. The turnover of use is lower compared to other items of clothing, especially for insoles. The points of close contact between footwear and body make it possible to collect biological data more easily by means of sensors and there is great variability in technological solutions already applied to the world of footwear that can be used in design. On the negative side, there are the design difficulties in intervening on interfaces based on tactile outputs whose languages are less explored than those of competing wearable devices with a screen. However, these languages record a vast field of research to aid visual disabilities and postural correction.The research carried out by the Advanced Design Unit of the University of Bologna, which studies the theme of enabling technologies and their incorporation, has opened some applied research areas regarding this topic.The project of the designers Bencivenni, Conti and Pucci is aimed at users of a certain age or with motor problems. Through sensors inserted in the slippers it is possible to detect the movement trajectories of the user and relate them to a three-dimensional model of the house created with photogrammetry techniques. The data crossing, represented in a specific application, is a tool in the hands of several actors. It involves the family that monitors the user’s activity or inactivity in a non-invasive way and the medical staff that verifies the progress of the patient. Obviously, also the user is directly involved and can read the data in infographics.The project of the designers Bagalini, Bergantino, and Davoli investigates the field of safety at work. This project analyzes dangerous situations on two safety levels. The general system is designed to locate personnel during evacuations from buildings. The issue addressed is the impossibility of identifying the position of people in space, especially in relation to the height at which they are located. The designers have suggested the construction of portals at every level of the building such as stairs
143142 FocusDesign and Technologies
and elevators. The computer system and portals detect the human passage through Radio-Frequency Identification (RFID) and Real-Time Locating Systems (RTLS) present inside the footwear, guaranteeing active monitoring of presence on each floor of the building. The second level of safety consists in inserting a vibration actuator in the spur of the shoe whose activation alerts the user in real time both when is near a risk zone and when potentially dangerous objects are approaching. While the general level uses the foot as a space in which to insert technology, the second intervention aims to integrate with human perception in a moment of potential danger.The designers Canafoglia and Veltroni have developed a project in a particular field of application: the use of enabling technologies in horse racing. The designers chose the heel of the jockey’s boot as a place of intermediation between human perception and the data concerning the physiological and emotional state of the animal, detected by sensors applied to the horse. Through a vibration code the jockey has a description of the state of fatigue and excitement-fear of the horse so as to decide to change his behavior by synchronizing himself to interact most effectively with the animal.As Schlemmer teaches through his geometricized characters, the application of elements to the body is not a limit but a way to explore languages. The intentional modification of the human body is not an easy operation: the complexity of the body system is based on balances that are often not visible, which go beyond the gestures because they bind movement and perception. Intervening in these contexts requires the designer to expand the design field to the user’s attention resources. This involves the hierarchization of the information gathered and a renewed perception of reality. Extreme design experiments, like those given for dance, enable us to understand some of the consequences of the aforementioned modifications. In this pre-cyborg phase, where digital technology has already begun to integrate with the body, but still needs to experience a true application boom, it is necessary to establish adequate knowledge to manage the relationship with a technology capable of modifying the relationship that humans have with reality.Among the parts of the body that are currently applications for wearable technologies, the foot appears to be more suited to becoming an area of experiments that accom-pany the transition to a post-human future. The foot, already the limit between body and context, in this phase is a candidate to become a threshold with the digital world, a mediator of data entering and leaving the body, an active border.
References
> Ammanniti, M., & Gallese, V. (2014). La nascita dell’intersoggettività. Lo sviluppo di sé tra psicodinamica e neurobiologia. Torino: Raffaello Cortina. > Bentivoglio, M., Bertini, G., Cracco, C., Esposito, V., Geuna, S., Giacobini, G. et al. (2001). Anatomia umana e istologia. Torino: Minerva Medica > Bistolfi, M. (1982). Schlemmer Oskar, scritti sul teatro. Milano: Feltrinelli. > Buiatti, E. (2014). Forma Mentis, neuroergonomia sensoriale applicata alla progettazione. Milano: FrancoAngeli. > Caffo, L., & Marchesini, R. (2014). Così parlò il postumano. Aprilia: Novalogos. > Celaschi, F. (2017). Non industrial design. Milano: Luca Sossella. > Del Vecchio, B. (2006). L’adorazione del piede. Roma: Castelvecchi. > Diamond, J. (2013). Il mondo fino a ieri. Torino: Einaudi. > Fimiani, M. (1984). Marcel Mauss e il pensiero dell’origine. Napoli: Guida Editori. > Fimiani, M. (2000). L’arcaico e l’attuale. Torino: Bollati Boringhieri. > Galimberti, U. (2013). Il corpo. Milano: Feltrinelli. > Giomi, A. (2017). Percezione aptica, feedback sonoro e mediazione tecnologica. Uno studio fenomenologico sui processi d’integrazione multimodale nell’ambito della pedagogia della danza. Danza e Ricerca, 9, 245-272. doi: 10.6092/ issn.2036-1599/7679 > Gould, S.J., & Vrba, E.S. (2008). Exaptation. Il bricolage dell’evoluzione. Torino: Bollati Boringhieri.
> Landau, D. (2015). Lavorare con i motori a vibrazione. (2015, n.d. december) Retrieved from http://omomlab.blogspot.com> Mallgrave, H.F. (2015). L’empatia degli spazi. Architettura e neuroscienze. Torino: Raffaello Cortina. > Mancuso, S., & Viola, A. (2015). Verde brillante. Firenze: Giunti. > Manzi, G. (2017). Ultime notizie sull’evoluzione umana. Bologna: Il Mulino. > Maturana, H., & Varela, F. (1985). Autopoiesi e cognizione. Venezia: Marsilio. > Maturana, H., & Varela, F. (1992). Macchine ed esseri viventi. Roma: Astrolabio. > McCormick, J., Hossny, M., Fielding, M., Mullins, J., Vincent, J., Hossny, M. et al. (2018). Feels Like Dancing: Motion capture driven haptic interface as an added sensory experience for dance viewing, Leonardo, (pp. 1-9). doi: 10.1162/leon_a_01689 > Nicoletti, R., & Borghi, A.M. (2007). Il controllo motorio. Bologna: Il Mulino. > Renfrew, C. (2011). Preistoria. L’alba della mente umana. Torino: Einaudi. > Riello, G., & McNeil, P. (2007) Scarpe. Dal sandalo antico alla calzatura d’alta moda. Novara: Colla. > Sennett, R. (2009). L’uomo artigiano. Milano: Feltrinelli. > Vergine, L. (2015). Body art e storie simili. Milano: Skira. > von Foerster, H. (1987). Sistemi che osservano. Roma: Astrolabio. > Zannoni, M. (2018). Progetto e interazione. Macerata: Quodlibet.
145Focus
Focus
Fabrizio Valpreda, Marco Cataffo
> [email protected] [email protected]
diid n.67/2019
Technological scenarioTalking about technological evolution in 2019 inevitably means to risk repeating what is already known and openly accepted by all human communities with access to the digital world. In fact, in June 2019, there were more than 4.4 billion Internet users worldwide, more than 2 billion of which just in Asia, where the penetration rate is still only 53.6%, compared to 87.7% in Europe, which has 727 million users connected to the World Wide Web (Internet World Stats data, checked on September 1st, 2019). That this data is significant at first glance seems quite obvious, but it is interesting to linger, even if only momentarily – this is not the subject under discussion – on the penetration, that is the density of use in the populations taken into consideration: it seems at least interesting that in Asia, where almost all the production of digital devices of any kind has been concentrated for decades, the level of digitalization of people is still so low. Whether it depends on cultural rather than economic or social issues, or more likely on a complex combination of them is of little importance; what matters is the fact that these populations are more excluded than Western popula-tions from the phenomena discussed below, leaving it to others to determine the phenomena related to the pervasive adoption of advanced technological solutions.The life of this multitude of connected people depends to a large extent, and not entirely consciously, on the information that travels on the Internet: such information represents a new precious resource, whose nature, quantity and economic value are impossible to estimate and exploit in their entirety and complexity by individuals, but also by important international stakeholders, even when they are main actors in the production and management of the data itself. This, unlike clean water, breath-able air or oil, is not only renewable but is constantly growing in quantity, density, complexity and completeness.Such a picture, highly articulated in itself, is enriched with further variables by virtue (some say through guilt) of three crucial innovation phenomena represented by the so-called Internet of Things (IoT), pervasive robotics and Artificial Intel-ligence (AI).The first one, consisting in the ability of the Internet to transmit digital informations that can bidirectionally become physical and then turn back into digital, produces effects on a range of aspects of human life still far to be defined and yet in contin-uous evolution (Brynjolfsson & McAfee, 2016). Referring to the world of design and the production of artefacts, for example, the only possibility of elaborating solutions, sharing them online for prototyping thousands of kilometres away, digitizing them to verify their validity and finally sending them back to the source is not only a process innovation but also a disruptive conceptual one: we stop thinking locally but we do not even go through the concept of design globalisation, since local nodes become part of a larger and more complex system, of process and method, without however getting lost in it. We will go back to the concept later on, defining its contours better and above all trying to understand its implications in the field of Design, but not only.The second path, on the other hand, naturally stems from the centuries-old expertise
The dichotomous, almost dystopian scenario that we face when we look at the current framework of technological develop-ment poses increasingly pressing questions for what regards the relationship that we, as a human kind, have with the digitised automation of our lives. Internet, robotics, data cloud computing and artificial intelligence are tools widely used in our society, however, we are not yet able to really get into this innovation and while we are looking for solutions, we do not live without a certain sense of inadequacy: we exploit innovation but got to come partly dependent on it, up to the point of producing social effects, sometimes even harmful.The intelligent human-machine relationship becomes a topic for further investigation when applied to the field of design and artefacts production, whereas in traditionally passive tech-nological environments humans work actively, determining conscious choices: the introductions of artificial intelligence determines a habits shift because it transforms the values in the field, it upsets them.Starting from principles and methods in some of the scenarios in which design traditionally acts, i.e. production, multidiscipli-nary connective relations, designed innovation, the application of collaborative strategies between human and artificial intelli-gence is hypothesized.It is therefore suggested an experiment useful to bring out the potential of the relationship between human beings and machines in place of the predisposition of rules of conduct that fix the roles by freezing them in the recipients and determining in fact the failure.The output scenario offers food for thought on values, power relations, connections and on how much local action is comple-mentary to a global complexity that can no longer be evaded; there, design in its bidirectional relations between subjects and components, provides on field experimental solutions, working closely to the subjects directly involved.
Human-Machine Co-Living
[ robotics, human-machine co-living, artificial intelligence, open design, design by components ]
Associate Professor, Politecnico di TorinoPhD student, Politecnico di Torino
147146 FocusDesign and Technologies
developed in the automation sector; in fact it is the result of the industrial revolution itself, where machines that carry out work in place of humans have always been seen as an alternative pole and opposed to the human being, in a pair that is undoubtedly profitable but also intrinsically harbinger of critical dynamics. This is so true that over time, and since the dawn of industrialisation, it has determined a deep and widespread cultural transformation in all the places of civilisation where industrial production has been located, or at least the effects have been introduced, in terms of the use of artefacts, economic and social effects. Literature and cinema have always found fertile ground in this scenario on which to produce entire new production genres.The third is a further level of evolution that now characterises our technological evolvement and that finds its own specificity within the contrast with one of the most peculiar characteristics of the human being: intelligence. Ours is natural, biological, analogical, while the one of machines is artificial, technological and digital. In fact, whether Kurzweil is right or not about the Singularity he evokes (2005), what is clear is that the interconnections between human beings and machines are now settled, pervasive and irreversible.To better understand this last piece of the techno-evolutionary puzzle that we are building, it is obviously necessary not to limit ourselves to imagining the machines that we can think of in anthropomorphic terms: mobile phones are intelligent machines, as are cars, many household appliances, more and more household objects, security systems and also, obviously, the entirety of industrial production, logistical, administrative and management systems. Our behaviour is indeed, and more than evidently already transformed and taken for granted, where, for example, the percep-tion of those who speak to a non-physical digital system instead of a real person is seen in a radically different way than it would have been thirty years ago. Or again, we normally accept and live experiences of interaction with automated systems of booking, financial management or even health care, going so far as to accept that a machine is what determines and carries out therapy or treatment activities on us instead of a human doctor.Therefore, talking about machines considered as isolated devices that perform a task is now conceptually misleading, if not wrong, since even the smallest system, integrated with others, is the node (neuron?) of a network of complex artificial intel-ligences, endowed not only with processing capacity – and decision – but also with motor skills (Tegmark, 2017). The definition of intelligence becomes more difficult, since the artificial one can perform much faster than ours, not even being so far from being endowed with evolved cognitive powers, such as to potentially overcome the concept of limit imposed by the Turing test, contrary to what Aleksandar Todorović stated (2015). In fact, whether we are right or not while we think that it is not possible for an artificial intelligence to overcome the human one, it becomes irrelevant if we think about the history of human evolution in relation to technology: when a tech-nology has had an impact on society and has been implemented by humanity, it has always evolved in unexpected ways and faster than its creators might have thought.
This does not mean, evidently, that a disruptive and pervasive innovation is defini-tive: what is happening to the personal transport sector, but not only, is a powerful example, where the internal combustion engine is seeing its definitive, albeit slow, decommissioning approaching, after almost two centuries of absolute dominance over any other form of propulsion.Anyway, taking into account the evolutionary potential of artificial intelligence, we can assume that very soon in the future the integration between human beings and machines will be such as to produce effects of socialisation (and also empathy) such as to make the relationship between the two intellectual domains, comparable with the human-human one. After all, watching any of the promotional videos of the Atlas project of Boston Dynamics is enough to understand that we are not far from suffering for machines or being afraid of them.It is precisely with regard to this aspect that the concept of slavery evoked by Ingold (1993) in relation to human activity towards the landscape, as consolidated by the previous considerations of Tapper (1988) regarding domestication in the agricultural sector, comes to our aid.Human-machine co-living is therefore a complex field, whose boundaries are not only not yet defined but are increasingly difficult to handle.
Evolution of behavioursStarting from the assumptions of Ingold and Tapper we can try, through a strong simplification, an exercise of logic that leads us to better understand the extent of the evolution of human behaviour, towards the semi-sentient digital counterpart.In fact, the environment in which we have been working for years is now made up of instruments-machines that could be compared to a flock of animals, or plants, raised and cultivated by us, that need care, food and a protected home that leads them to produce the welfare that we expect from their proliferation.In this sense, there is clearly a passive natural environment, in which an active sentient subject operates, which dominates and controls actions, parameters and strategies with respect to what it deems more appropriate to happen.The introduction of artificial intelligence determines a radical change within this configuration.First of all, we are still in a condition of instrumentality, where the passive environ-ment is made up of machines instead of animals and plants; this was the case with the steam weaving machines of the late nineteenth century (Deane, 1965). However, increasingly intelligent devices, therefore independent in their operative choices, introduce new variables in the human-machine relationship. So it happens that the environment is no longer completely passive: strategies, methods and actions are increasingly managed independently by machines, which automate like the aforemen-tioned steam engines but by making decisions, based on algorithms, whose results depend on the amount of data in the cloud, something that humans being could not manage by themselves.
149148 FocusDesign and Technologies
Data, then, but not only. What is about to become disruptive is the ability of machines to process this data in unexpected ways. In fact, we are already in this condition: for example, driving applications are able to collect information in real time, check travel times based on the type of road, traffic, roadworks, accidents or detours impossible to be seen by humans, and then propose alternative routes to choose from. It is still up to us to choose, even if the independent driving horizon suggested by the SAE J3016 standard (Thrun, 2010) already establishes a moment, both regulatory and evolutionary, in which the choices will be made in total autonomy by machines. In essence, we will be able to load our children aboard totally autonomous vehicles, that will take them to school without our direct control.Forwarding this scenario, the same distinction between human and artificial intel-ligence may falter, whereas the boundaries between the two will become so blurred that they will no longer be perceptible, making the Turing test completely irrelevant.
An alternative wayWithin this scenario, it is clear how important the role of Design is, especially in its specific ability to generate those virtuous connections that are typical of natural systems.In the attempt to find possible ways to guide us to a viable solution, we can, as designers, try to think about an alternative path.With this objective in mind it is possible to draw inspiration from scenarios, also in evolution, to which we are closer and more similar in terms of experience; in this field the innovative production systems, the new logic of design and implementa-tion of products and solutions with an approach to sharing and the use of digital technologies in new design spaces and communities can provide us with profitable speculative margin.We are referring specifically to the world of digital manufacturing, which through the methodologies offered by Open Source Design, the communities of Makers and FabLabs, allows us to outline different paradigms within the relationship between human beings and technology (Anderson, 2012).What emerges relevant in this context is the type of relationships that exists between the subjects and the languages/rules they use while engaging design and production processes.We are talking about a population of heterogeneous independent designers and plan-ners, or groups of them, who develop projects in an open way, putting themselves in a bi-directional relationship with other entities, not only equal but also belonging to different environments, such as companies, public administrations, professionals even apparently far from design.These communities also find fertile ground in the open approach provided by the Open Source strategies, which are operationally declined by the alternative ways of attributing intellectual rights offered by the Creative Commons license system. Therefore, communities of designers act locally with production systems and within networks of skills and responsibilities contained into local territory, however
connected to the global network to which other similar communities and third parties who act on a larger scale, such as large companies, up to entire nations, such as Iceland and the United States can access (Smith et al., 2015).The interesting aspect is precisely the ability to develop local nodes, locally active, which, however, are globally connected to determine innovation, transmit knowl-edge and implement shared solutions that are not redundant and are more effective/efficient. This operative mode, completely different but not in contrast with the strat-egies of globalisation (leading to the proliferation of macro-infrastructures requiring top-down control), offers the possibility of being adapted also to different areas, thus consisting in a possible solution to the dilemma produced by the human-machine coexistence, which is not only believable but also feasible.
Co-Living, possible?Exploiting the idea of designing systems from its components (Jones, 2014) is certainly not new, but it does offer interesting hints in this specific case.If we analyse the mechanisms determining the processes in the world of open digital manufacturing, we can say that local decisions, taken by a variety of actors with shared interests, are probably the most effective ones: although the largest system is complex and difficult to predict, its sub-units are less so. On the contrary, acting at an exclusively global level has harmful effects on the individual constituent units, as highlighted, for example, in the case of market globalisation (Christensen & Kowal-czyk, 2017).In order to increase cognitive ergonomics and affordability for the end user, each subsystem (component) must therefore have a self-sufficient life cycle, with explicit functions that make its purpose recognisable. A great advantage of this modular organisation is that improvements in the structure of a function can be integrated into the whole system without having to weaken or, worse, wiping out the value of any other part. To be part of a larger system, these components must also be connected, which means that they must interface, communicate with each other with a shared communica-tion code. This is obviously possible thanks to data transfer through the Internet, but above all thanks to the widespread development of Cloud Computing and Data Management services now available to anyone who needs to process information, either their own or from third parties. We must obviously take into account the fact that high connectivity leads to difficulties in centralised control and in predicting causes and effects, leading to the need to localise decisions as much as possible.There is little chance of finding a single optimal solution for the entire width of the system; much of the information and current implementation takes place on a local scale, which requires a decentralised approach. While in simple and stable systems the homogeneity of inputs is favoured over a more problematic diversity, in complex social systems heterogeneity is incredibly more valuable, increasing both the range of current information and the solutions generated. The ability to configure sequences
151150 FocusDesign and Technologies
or arrays of functions to handle complex tasks in different and evolving scenarios, together with the feedback provided by monitoring the condition of the environment, gives users a much greater ability to engage.A useful experimental example that can help verify this hypothesis is the Robot-ics-as-a-Service Framework, a cloud computing service model that allows you to seamlessly integrate robots and embedded devices in Web and cloud computing envi-ronments. As a service-oriented architecture for robotic applications, a RaaS unit has the environmental potential to decouple the production of economic value from the consumption of energy and resources. It includes feature execution services, a direc-tory of discovery and publishing services, and service clients for direct user access. This platform allows to manage the components of robotics both as an increasingly granular integration of the control over automated tasks, and as part of a widely aware set that emerges from their connectivity (Mori, 2014). In this scenario, the Participa-tory Design for Service Robotics is an example of how integration between humans and machines is possible even in critical scenarios such as agricultural production.The involvement of users, both human and non-human, is ultimately the decisive direction that leads to a new structure, potentially useful to solve the human-machine dichotomy: the active, conscious, self-determined involvement of people who act/interact with machines requires in fact that their own human nature, only partially configurable, however deeply unpredictable even when guided by logic, to be the engine of the relationship with AI; this can have the ability to calculate, predict, configure useful and complementary to human nature.Faced with a social, environmental and political crisis that does not arise from human-technological crisis but that sinks its effects into it, finding itself in the separation of human action and social responsibility from the sphere of our direct involvement with the non-human environment, it is certainly necessary to reverse the trend and change priorities.A designed system of product and service components follows the principle of purpose seeking. As Jones further explains in his article on systemic design principles, the principle of purpose provides a comprehensive view of problematic space. The diversity of solutions provided by a modular configuration of many functionalities, which the system provides in the form of services, guarantees a balance between fixed purposes and is what Jones calls creative framing.Ultimately, therefore, we can formulate the idea that human beings and sentient machines can co-exist to the extent that we can provide them with a structure of complex relationships, in which each one of us has the opportunity to express its contribution to innovation through a network of output-input-output iterative connections between components, biological and digital, whose specific character-istics will help to generate the drive for innovation necessary for the evolution of organisms of whatever nature they are or will be.
References
> Anderson. C. (2012). Makers: The New Industrial Revolution. USA: Random House.> Brynjolfsson, E., & McAfee, A. (2014). The Second Machine Age: Work, Progress, and Prosperity in a Time of Brilliant Technologies. New York: Quantitative Finance.> Christensen, B. J., & Kowalczyk, C. (2017). Globalization, Strategies and Effects. USA: Springer > Creative Commons Official Website. (2019, 29 september). Retrieved from https:// creativecommons.org > Deane, P.M. (1979). The First Industrial Revolution (2. ed.). UK: Cambridge University Press. > Hielscher, S., Smith, A., & Fressoli, M. (2015.) WP4 Case Study Report: FabLabs, Report for the TRANSIT FP7 Project, SPRU, University of Sussex, Brighton. > Ingold, T. (1993). The temporality of the landscape. World Archaeology, 25(2), 152-17. > Internet World Statistics. (29 september 2019). Retrieved from https://www. internetworldstats.com/stats.htm
> Jones, P.H. (2014). Systemic Design Principles for Complex Social Systems. In Metcalf, G.S., Social Systems and Design. (pp. 91-128). Tokyo: Springer Japan. > Kurzweil, R. (2005). Singularity is near. USA: Viking. > Mori, K. (2014). Concept-Oriented Research and Development in Information Technology. USA: John Wiley & Sons. > Tapper, R. (1988). Animality, humanity, morality, society. In T. Ingold (Ed.), What is an animal? (pp. 47-62). London: Unwin Hyman. > Tegmark, M. (2017). Life 3.0: Being Human in the Age of Artificial Intelligence. New York: Deckle Edge > Thrun, S. (2010). “Toward Robotic Cars”. Communications of the ACM. 53 (4), 99-106. > Todorović, A. (2015). Has The Turing Test Been Passed? (2019, 29 september) Retrieved from http://isturingtestpassed.github.io
153Focus
Matteo Zallio
Focus
diid n.67/2019
Wearable devices and the role of emotionsRobotic devices, in particular certain wearable devices, are nowadays considered to be connected, electronic technologies, that enable various human-machine interac-tions: from closely monitoring individuals’ activity, to fast social connections and notification with messages and alerts (Gao et al., 2016).A recent research in the domain of wearable devices highlighted that perceived usefulness and the sense of mobility induced by smart watches led to a perception of greater ease of use of the technology (Kim & Shin, 2015).A later study showed how perceived usefulness, social image and the generated enjoy-ment are specifically identified as components of the emotional response (Yang, Yu, Zo & Choi, 2016), which is impactful in nowadays use of wearable devices whether they are smartwatches or prosthetics.According to Hockenbury et al. (2007) emotion is usually defined as a complex state of feeling that results in physical and psychological changes that influence thoughts and peoples’ behaviour.Emotions can vary depending on cultural background, behaviour, contexts and expe-riences (Lim, 2016), while emotional state can change radically at different times of the day with, potentially, depending on the nature and speed of the change, a massive impact on what the user expects from technology. In order to guide the user journey through new interactions and new technologies, the design of human-machine interaction must respond to changing market needs following the emotional design approach (Norman, 2004).This process enables an evolution of the designer’s role in the creative development procedure of new facilitators (solutions) that can impact on user emotional response in the human-machine interaction process.
Research hypothesisIn a growing market, where there are constraints related to usability (Chun, Dey, Lee & Kim, 2018), obsolescence (Zallio & Berry, 2017), and systems’ updateability (Dehghani, 2018), there is substantial room for improvements. A key to foster those improvements lies in understanding user emotions for developing engaging solutions that amplify human sensitivity.An important aspect of the human-machine interaction design is related to the type of emotions generated and how these impact on the interaction with a range of wear-able devices.Two research hypotheses have been developed to better investigate this aspect:How is it possible to efficiently understand user emotional response while interacting with wearable devices?Which methods for understanding emotions are currently in use and what is their impact for designers?This paper aims to facilitate the understanding of different methods for the analysis of user emotional response, in order to implement a comprehensive tool that would
The design of robotic devices’ interfaces strongly impacts on the innovation process of human-machine interaction. The intrinsic capacity of an interface update (soft or hard) to improve usability, to reduce obsolescence and to improve selection and purchase, is a design strategy largely used by companies and designers to fundamentally improve users' emotional engagement. Over the last few years customers have modified their choice from necessity-driven solutions towards solutions that integrate meaningful experiences.Those changings support an evolution of the designer’s role in the creative process to develop new mediums (solutions) aimed at improving the emotional response in the human-machine interaction process.This work considers those factors that foresee a rapidly evolving future scenario, and asks what methods to under-stand emotions are currently in use and what is the impact for designers.This research explores through a critical methodological scien-tific literature review process the state of the art of methods for understanding the impact of emotions for the interface design of wearable devices.Following the revision of selected publications over a 55 years’ timeframe, indexed in seven online academic databases, two main methods of emotion analysis have been identified: objec-tive and subjective methods of analysis.It is intended that the generated knowledge will improve the comprehension of methods to analyse user emotional response in order to experiment an efficient emotional analysis tool in the next research step, with the final aim of enabling the practice of emotional design in the human-ma-chine interaction design process.
Design, emotions and wearable devices
[ human-machine interaction, interaction design, wearable device, user experience, emotional design ]
Fulbright Fellow, Stanford University, USA
155154 FocusDesign and Technologies
support designers in developing new interfaces and human-machine interactions for wearable devices according to the practice of emotional design.
Methodological literature reviewWith the evolution of technology instrumentation, in the last few decades different theories and methods for measuring and analysing the emotional response of human beings have been largely developed.A study of academic publications indexed in a defined number of online databases (Elsevier, Scopus, PubMed, IEEE Xplore, JSTOR, Mendeley, Google Scholar) was undertaken.These were selected according to four disciplines such as engineering, medicine, biology and psychology, and evidenced various researches focusing on the analysis of emotions in relation to human-machine interaction.Most of the studies were focused on data collection of facial expressions and other behav-ioural manifestations as well as direct measures of human brain or body stimulations.After a search of title and abstract of the selected articles (n=226) over 55 years (i.e. 1965 to 2020), timeframe in which major emotion analysis techniques became more used in the scientific community, preliminary results have been identified and grouped in two main categories according to the approach from Desmet (2003):.. “objective” methods of analysis: including the use of medical devices and tech-
niques to observe the electro-dermal responses; cardiovascular changes; eye movement and blinking; brain waves; postural, gesture and facial expressions;
.. “subjective” methods of analysis: including interviews, surveys and focus groups; self-reporting questionnaires and more in general qualitative measures.
Objective methods of analysisObjective methods of analysis for understanding certain human emotions, can be juxtaposed with postural, gesture and facial expressional patterns (Ekman, 1994).The Facial Action Coding System-FACS (Ekman, & Friesen 1978) the Maximally Discriminative Facial Moving Coding System-MAX (Izard, 1979), and the Facial Expression Analysis Tool-FEAT (Kaiser & Wehrle, 2001), are methods that put in relation human facial expressions with certain emotions previously coded. Physiological reactions, described as an activity change in the Autonomic Nervous System (ANS), are responses that normally come along with different discrete emotions (Levenson, 1988). The most commonly assessed indices of ANS activation are based on electrodermal or cardiovascular response, such as the heart rate (HR), blood pressure (BP), total peripheral resistance (TPR), cardiac output (CO), pre-ejection period (PEP), and heart rate variability (HRV) - (Mauss & Robinson, 2009). Speech recognition and certain features of the voice attributes, such as pitch, loudness or sound pressure, timbre, and tone (Dasgupta, 2017) can be used as well as indicators of a physiological reaction leading to understand certain emotion.
Different researchers developed deep studies involving electroencephalography (EEG), functional magnetic resonance imaging (fMRI), and the positron emission tomography (PET), and proposed that an understanding of discrete emotions is likely to be identified in the brain (Buck, 1999; Izard, 2007). By using these technologies and methods, the general assumption is that a different (generally greater) signal reflects greater blood flow to a particular brain region, which in turn is thought to reflect the activation of that particular region. However, some disadvantages arise when using objective methods of analysis: the number of clearly understandable emotions is limited, the rate of accuracy for the set of six up to eight emotions is low, interpolating data and assess mixed or complex emotions is difficult and complex, and the human-intrusiveness of certain techniques doesn’t lead to a wide uptake of the objective methodologies in the common practice of emotion analysis.
Subjective methods of analysisInteraction with users, in particular through subjective methods of analysis normally used by designers and anthropologists, such as ethnography and interviews, enables to overcome some of the limitations when using technological instruments. This follows a better, deeper understanding of subjective users’ feelings and a conscious awareness of their emotional state or experience (Larsen & Prizmic-Larsen, 2006). In the last few decades several techniques have been developed to subjectively measure emotional responses including: the Multiple Affect Adjective Checklist – Revised, MAACL-R (Zuckerman, Lubin & Robins 1965), the Profile of Mood States, POMS (McNair, Lorr & Droppleman, 1981), the Positive and Negative Affect Schedule, PANAS (Watson, Clark & Tellegen, 1988), the Self-Assessment Manikin, SAM (Bradley & Lang, 1994), the Brief Mood Introspection Scale, BMIS (Schuldberg & Gottlieb, 2002), the Emocards (Desmet, Overbeeke & Tax, 2002), the Day Reconstruction Method, DRM (Kahneman, Krueger, Schkade, Schwarz & Stone, 2004), the Expe-rience Sampling Method, ESM (Hektner, Schmidt & Csikszentmihalyi, 2007), the “PrEmo” and “LEM tools” (Premo and LEEM Tool, n.a.), and the Geneva Emotion Wheel, GEW (Scherer, Shuman, Fontaine & Soriano, 2013).Subjective methods of analysis base their understanding of the emotional response mainly on a direct interaction between researcher and the human subject. Many techniques use images or pictograms that are evaluated by users, with specific words or sentences briefly describing the emotional status, verbal questions and answers, or through observational comparison between facial expressions and graphical face representations.
Characteristics of methods for the analysis of emotionsSubjective methods of analysis of what is a large variety of emotions are adopted by many designers and anthropologists to make it easier to understand them. Such methods can facilitate the identification of users’ inner responses with a higher level
157156 FocusDesign and Technologies
of accuracy, without great technical knowledge or by using medical or complex tech-nological instruments (Chan, 2009). However, in order for subjective measures to be valid and accurate, two fundamental requirements must be met: the person’s emotional state must be potentially observable and analysable by the researcher or designer (Kaplan, Dalal & Luchman, 2013), and respondents must not have opportunity to distort their emotional feedback in order to hide any particular psycho-cognitive altered state (Sorensen, 2008). A further relevant issue reflects the difficulty in translating emotions in to verbal expressions across different cultures and languages, as it usually happens with the Geneva Emotion Wheel.Moreover, gender inequalities can arise among research participants when there are different cultural perceptions of certain emotions when represented by graphical characters that may have a gender reference (male or female), such as with the PrEmo and LEM tools.An interesting solution developed to overcome some of these disadvantages is the Self-Assessment Manikin (SAM): a non-verbal pictorial assessment technique that directly measures the pleasure, and dominance associated with a person's affective reaction to a variety of stimuli (Bradley & Lang, 1994). However, SAM method has a redundant limitation because it can only report on very generalised emotional states.A further method for measuring emotions, focused on mobile devices, is the Expe-rience Sampling Method (ESM), described in the work of Meschtscherjakov, Weiss & Scherndl (2009).The core aspect of ESM is to capture rapidly-changing emotional states and user responses, involving questions on thoughts and feelings within a limited set of five pictograms that cover just two emotional dimensions (pleasure and arousal) in order to maximise the efficacy of the study on mobile device displays.Ettcoff and Magee (1992) demonstrated how facial expressions could enhance the communication of emotions in a more effective way than verbal expressions.Facial expressions developed through pictograms, popular today with the rise of emoticons and lately of animoticons (animated versions of popular emoticons), indi-cate the key role of infographics and graphical representations in the current culture, in digital communication and social networks (Zallio & Berry, 2018).As the trend in usage of graphical representations grows among younger generations, it is natural that the scientific as well as the design community should evolve to under-stand this intergenerational change. Notwithstanding this evolution, it is necessary to consider the way in which non-verbal communications can be differently perceived by different generations, such as older people (Krohn, 2004). Aware of potentialities of current subjective methods of analysis of emotions, in the following list some of the main features for optimizing easy to use and effective methods to support designers and researchers to understand user-reported emotions in the human-machine interaction process are highlighted:
.. ease the user interaction process during the study by developing a two-dimensional emotional reporting procedure with pleasant and unpleasant emotions;
.. improve the number and description of emotions representation in order to better represent and capture user-based emotional feedback;
.. assure a gender balanced approach, thus fostering equality among participants by using infographics and pictograms without specific gender indications;
.. integrate emotional pictograms, taken from the contemporary language of graph-ical interactions, merged with text descriptions;
.. generate a modular, adaptable, straightforward procedure for emotional feedback collection, with a gradual shift between positive and negative emotional sets.
The methods analysed, as well as the highlighted features, have the potential to improve emotions understanding in order to generate features through which designers can be supported in developing an effective creative process for designing technological artefacts according to the principles of emotional design.
Future impactRobotic devices, in particular wearable devices, strongly impact on behavioural aspects of everyday life within a complex, evolving social context. In the future, designers will disruptively innovate the design of human-machine interactions through the design of emotional response, to enable new user expe-riences, new interactions and improve behavioural patterns among individuals in the society.In order to better understand how emotional design could affect the design process of human-machine interactions, the analysis and understanding of emotions generated through different interaction mediums should be emphasised. This exploratory study helped to develop critical knowledge regarding methods to measure and analyse users’ emotional responses during the human-machine inter-action process.This research can provide a fundamental contribution for the further research step focused on the experimentation of an effective tool to interpret the emotional response of users interacting with wearable devices.Future research will identify the main key emotional factors that determine a success or failure in the design process of user-friendly robotic technologies, with a strong impact on future re-design process of user-centered solutions.
159158 FocusDesign and Technologies
References
Buck, R. (1999). The biological affects: a typology. Psychological Review, 106(2), 301-36. > Chan, D. (2009). So why ask me? Are self-report data really that bad? In C.E. Lance & R.J. Vandenberg (Eds.), Statistical and methodological myths and urban legends: Doctrine, verity and fable in the organiza-tional and social sciences (pp. 309-336). New York, NY: Routledge. > Chun, J., Dey, A., Lee, K., & Kim, S. (2018). A quali-tative study of smartwatch usage and its usability. Human Factors and Ergonomics in Manufacturing & Service Industry, 28 (4), 186-199. > Dasgupta, P.B. (2017). Detection and Analysis of Human Emotions through Voice and Speech Pattern Processing. International Journal of Computer Trends and Technology (IJCTT), 52(1), 1-3. > Dehghani, M. (2018). Exploring the motivational factors on continuous usage intention of smartwatch-es among actual users. Behaviour & Information Technology, 37(2), 145-158. doi:10.1080/0144929X.2018.1424246. > Desmet, P.M.A. (2003). Measuring emotion; development and application of an instrument to measure emotional responses to products. In M.A. Blythe, A.F. Monk, K. Overbeeke & P.C. Wright (Eds.), Funology: from Usability to Enjoyment (pp. 111-123). Dordrecht: Kluwer Academic Publishers. > Desmet, P.M.A., Overbeeke, C.J., & Tax, S.J.E.T. (2002). Designing products with added emotional value: development and application of an approach for research through design. The Design Journal, 4 (1), 32-47. > Ekman, P. (1994). Strong evidence for universals in facial expressions: a reply to Russell’s mistaken cri-tique. Psychological Bulletin, 115(2), 268-287. > Ekman, P., & Friesen, W.V. (1978). Facial Action Coding System: A technique for the measurement of facial movement. Consulting Psychologists Press. Palo Alto, CA. > Ettcoff, N.L., & Magee, J.J. (1992). Categorical per-ception of facial expressions. Cognition, 44, 227-240. > Gao, W., Emaminejad, S., Nyein, H.Y., Challa, S., Chen K., Peck, A., Fahad, H.M., Ota, H., Shiraki, H., Kiriya, D., Lien, D.H., Brooks, G.A., Davis, R.W., & Jav-ey, A. (2016). Fully integrated wearable sensor arrays for multiplexed in situ perspiration analysis. Nature, 529 (7587), 509-514. > Hektner, J.M., Schmidt, J.A., & Csikszentmihalyi, M. (2007). Experience sampling method. > Hockenbury, D.H., & Hockenbury, S.E. (2007). Dis-covering psychology, New York: Worth Publishers. > Izard, C.E. (1979). The Maximally Discriminative Facial Movement Coding System (MAX). Newark: In-structional Recourses Centre, University of Delaware, Instructional Research Center.
> Izard, C.E. (2007). Levels of emotion and levels of consciousness. Behavioral and Brain Sciences, 30 (1), 96-98. > Kahneman, D., Krueger, A.B., Schkade, D.A., Schwarz, N., & Stone, A.A. (2004). A survey method for characterizing daily life experience: The day recon-struction method. Science, 306, 1776- 1780. > Kaiser, S., & Wehrle, T. (2001). Facial expressions as indicator of appraisal processes. In K. Scherer, A. Schorr & T. Johnstone (Eds.), Appraisal processes in emotion (pp. 285-300). Oxford: Oxford University Press. > Kaplan, S., Dalal, R.S., & Luchman, J.N. (2013). Measurement of Emotions. In R.R. Sinclair, M. Wang & L.E. Tetrick (Eds.), Research methods in occupational health psychology: Measurement, design, and data analysis. Routledge/Taylor & Francis Group. > Kim, K.J., & Shin, D.H. (2015). An acceptance model for smart watches: Implications for the adoption of future wearable technology. Internet Research, 25(4), 527-541. doi: 10.1108/IntR-05- 2014-0126. > Krohn, F.B. (2004). A Generational Approach to Using Emoticons as Nonverbal Communication. Jour-nal of Technical Writing and Communication, 34(4). 321-328. > Larsen, R. J., & Prizmic-Larsen, Z. (2006). Measuring emotions: Implications of a multimethod perspective. In M. Eid & E. Diener (Eds.), Handbook of multimeth-od measurement in psychology (pp. 337-351). Wash-ington, DC: American Psychological Association. > Levenson, R.W. (1988). Emotion and the Auto-nomic Nervous System: a prospectus for research on autonomic specificity. In H.L. Wagner (Ed.), Social Psychophysiology and Emotion: Theory and Clinical Applications. John Wiley & Sons Ltd. > Lim, N. (2016). Cultural differences in emotion: differences in emotional arousal level between the East and the West. Integrative Medicine Research, 5(2), 105-109.> Mauss, I.B., & Robinson, M.D. (2009). Measures of emotion: A review. Cognition & emotion, 23(2), 209-237. > McNair, P.M., Lorr, M., & Droppleman, L.F. (1981). POMS manual (2. ed.). San Diego: Educational and Industrial Testing Service. > Meschtscherjakov, A., Weiss A., & Scherndl T. (2009). Utilizing Emoticons on Mobile Devices within ESM studies to Measure Emotions in the Field. Paper presented at Mobile HCI ’09, September 2009, Bonn, Germany. ACM. > Bradley, M.M., & Lang, P.J. (1994). Measuring emo-tion: The Self-Assessment Manikin and the Semantic Differential. Journal of Behavior Therapy and Experi-mental Psychiatry, 25(1), 49-59. Thousand Oaks, CA: SAGE Publications, Inc. doi: 10.4135/9781412984201.
> Norman, D.A. (2004). Emotional design: Why we love (or hate) everyday things. New York: Basic Books. PrEmo and LEEM Tool, (2019, 25 january). Retrieved from http://www.susagroup.com> Schuldberg, D., & Gottlieb, J. (2002). Dynamics and correlates of microscopic changes in affect. Nonlinear Dynamics, Psychology, and Life Sciences, 6, 231-257. > Scherer, K.R., Shuman, V., Fontaine, J.R.J., & Sori-ano, C. (2013). The GRID meets the Wheel: Assessing emotional feeling via self-report. In J.R.J. Fontaine, K.R. Scherer & C. Soriano (Eds.), Components of emotional meaning: A sourcebook. Oxford: Oxford University Press. > Sorensen, J. (2008). Measuring emotions in a consumer decision-making context. Approaching or Avoiding, Working Paper Series, no. 20, Department of Business Studies, Aalborg University. > Watson, D., Clark, L.A., & Tellegen, A. (1988). De-velopment and validation of brief measures of positive
and negative affect: The PANAS scales. Journal of Per-sonality and Social Psychology, 54(6), 1063–1070. > Yang, H., Yu, J., Zo, H., & Choi, M. (2016). User ac-ceptance of wearable devices: An extended perspective of perceived value. Telematics and Informatics, 33, 256-269. > Zallio, M., & Berry, D. (2017) Design and Planned Obsolescence. Theories and Approaches for Designing Enabling Technologies. The Design Journal, 20(1), 3749- 3761. > Zallio, M., & Berry, D. (2018). Computer Aided Draw-ing software delivered through Emotional Learning. The use of Emoticons and GIFs as a tool for increasing student engagement. Paper presented at British HCI 2018. Belfast, UK. BCS Learning and Development Ltd. > Zuckerman, M., Lubin, B., & Robins, S. (1965). Validation of the multiple affect adjective check list in clinical situations. Journal of consulting psychology, 29 (6), 59.

Focusgallery
Focusgallery
Giovanna Giugliano
Focus gallery
diid n.67/2019
Unconventional Machines
Digital invasions that cross and overcome natural physical boundaries and alter language and communication modes; the focus gallery examines unconventional technological innovations from the creation of machines that vary conventional production processes to the configuration of devices for cognitive processing and control of digital systems. From Munari’s arhythmic machines to implantable devices for neural control, the tale of the gallery goes through the declinations of the interactions with the machines, which are outlined with time through an acute synergy between the parts and innovative expedients that modify human sensibilities and perceptions. During the Fifties, Bruno Munari theorized to “contrast” the invasive affluence of technologies – as tools of mediation, relationships and interaction with nature – by making art with “machines”, metaphor of dynamism and obsolescence of technological transformations; machines that come to life through interaction with people and are consumed by the passing of time. The connections between human and machine become “digital relations” and assume such a symbiotic value that configure expedients which renew the boundaries between the natural world and the artificial world. The paradigm shift sees human-machine interaction undergo a radical renewal; the interconnection and the cognitive processes become regeneration factors of interactions that modify human-human relations and dematerialize the barriers between them and technological systems. Design blends disciplines ranging from mechatronics to neuroscience, conceiving devices that intersect with their own “personality” up to the configuration of new unconventional art processes.A new biological intelligence is born, capable of configuring artificial consciousness systems, designing machines that emulate natural behavior and systems that amplify human skills and abilities that, according to Maldonado, manifest the existence of an isomorphic correspondence between nature and artifice. Body and mind have been studied and imitated separately for decades, but technological evolution has accelerated the research on artificial intelligence, configuring intelligent robots with advanced biomechanical and sensor capabilities. (Cingolani, 2019) Interacting with technological tools means transforming interactions with the outside world and the way we perceive ourselves. The synergy between humans and machine becomes an intimate process generated by the configuration of devices that impose themselves as body extensions, capable of enabling new channels of knowledge to improve attitudes and suitability.
[ unusual processes, communication machines, bionic learning, body extensions, neural connections, augmented visions ]
Brain-machine interaction interface
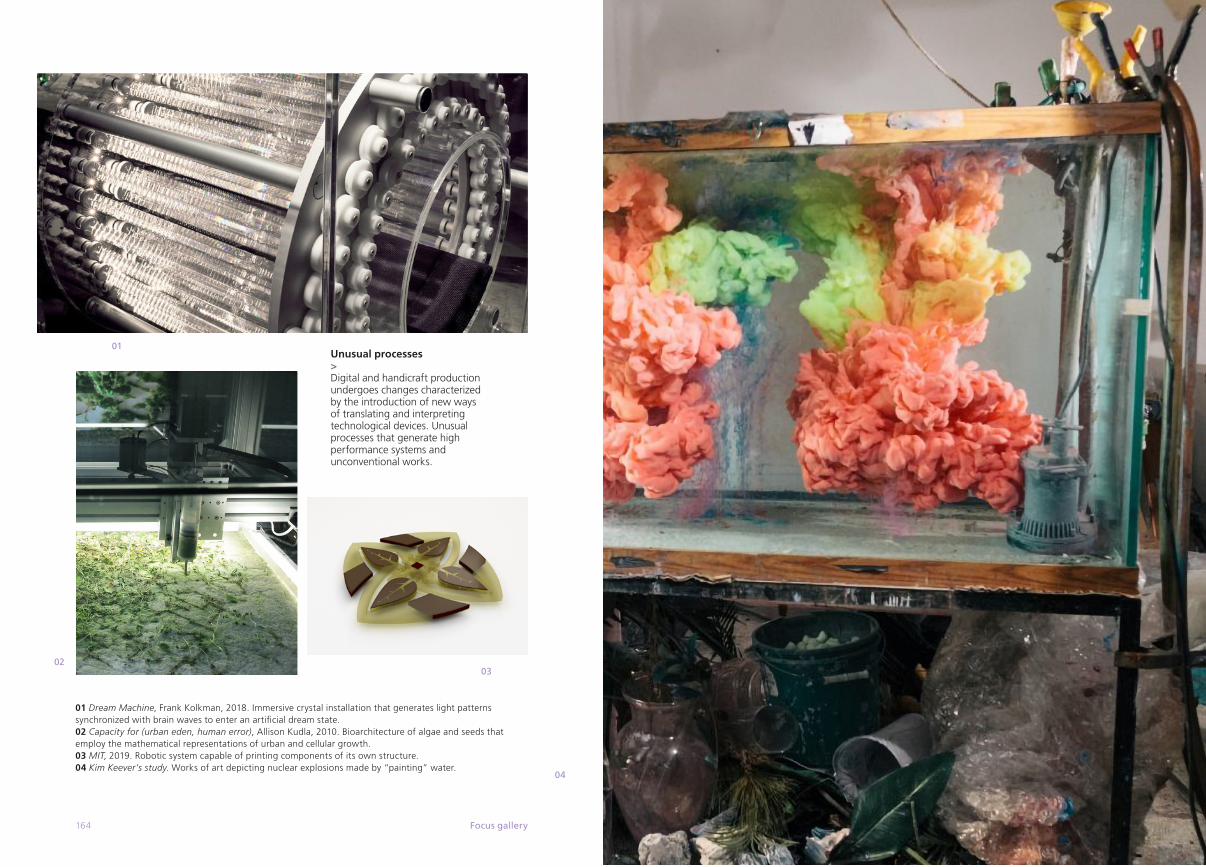
164 Focus gallery
01
0203
04
Unusual processes> Digital and handicraft production undergoes changes characterized by the introduction of new ways of translating and interpreting technological devices. Unusual processes that generate high performance systems and unconventional works.
01 Dream Machine, Frank Kolkman, 2018. Immersive crystal installation that generates light patterns synchronized with brain waves to enter an artificial dream state.02 Capacity for (urban eden, human error), Allison Kudla, 2010. Bioarchitecture of algae and seeds that employ the mathematical representations of urban and cellular growth. 03 MIT, 2019. Robotic system capable of printing components of its own structure.04 Kim Keever’s study. Works of art depicting nuclear explosions made by “painting” water.
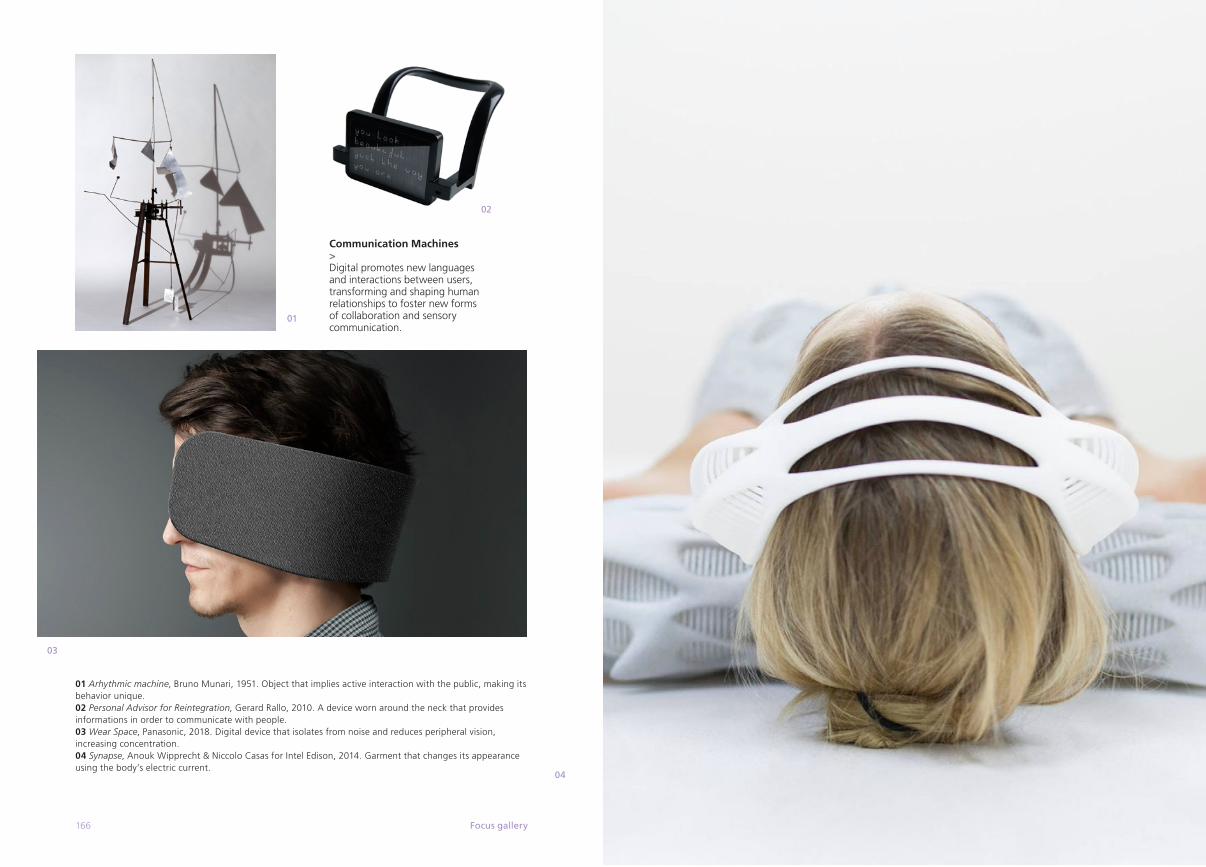
166
01
03
02
04
Focus gallery
Communication Machines > Digital promotes new languages and interactions between users, transforming and shaping human relationships to foster new forms of collaboration and sensory communication.
01 Arhythmic machine, Bruno Munari, 1951. Object that implies active interaction with the public, making its behavior unique. 02 Personal Advisor for Reintegration, Gerard Rallo, 2010. A device worn around the neck that provides informations in order to communicate with people. 03 Wear Space, Panasonic, 2018. Digital device that isolates from noise and reduces peripheral vision, increasing concentration. 04 Synapse, Anouk Wipprecht & Niccolo Casas for Intel Edison, 2014. Garment that changes its appearance using the body’s electric current.
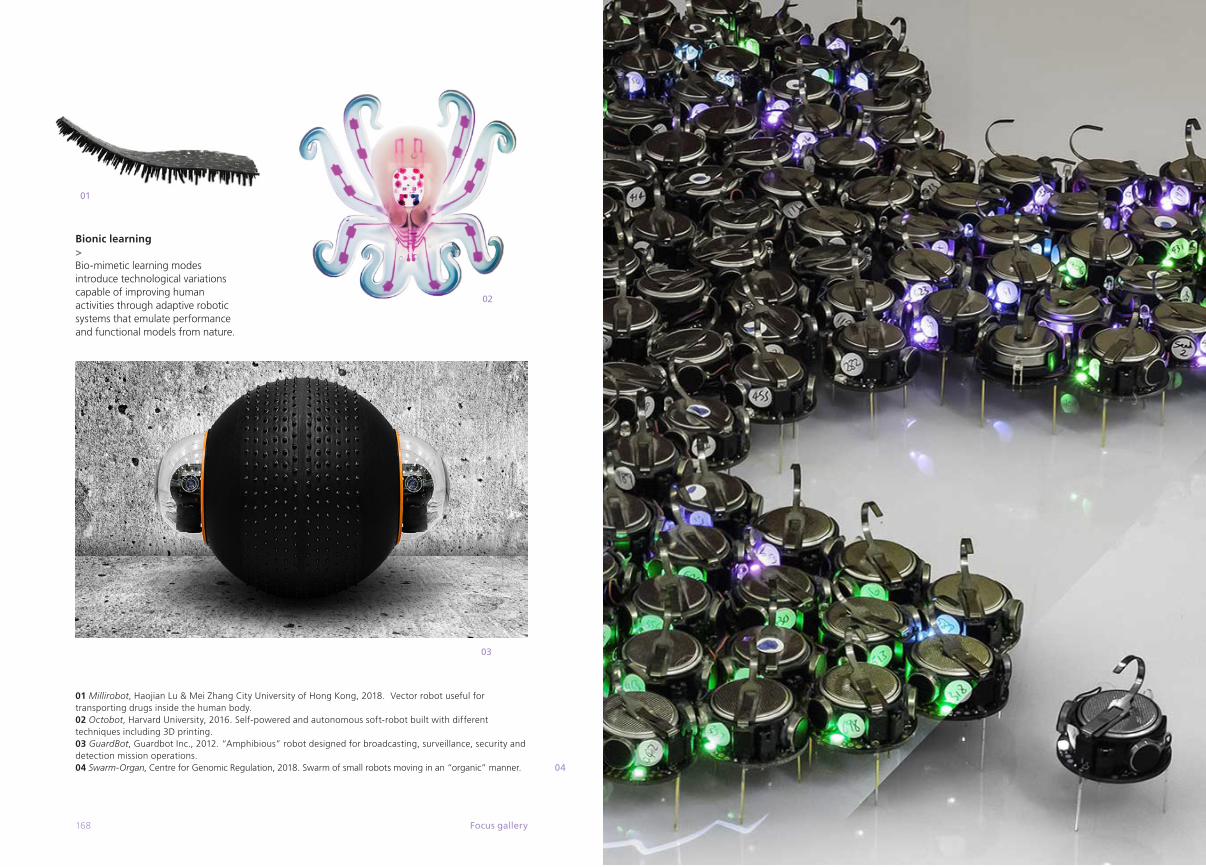
168
02
03
04
Focus gallery
01
Bionic learning> Bio-mimetic learning modes introduce technological variations capable of improving human activities through adaptive robotic systems that emulate performance and functional models from nature.
01 Millirobot, Haojian Lu & Mei Zhang City University of Hong Kong, 2018. Vector robot useful for transporting drugs inside the human body. 02 Octobot, Harvard University, 2016. Self-powered and autonomous soft-robot built with different techniques including 3D printing. 03 GuardBot, Guardbot Inc., 2012. “Amphibious” robot designed for broadcasting, surveillance, security and detection mission operations. 04 Swarm-Organ, Centre for Genomic Regulation, 2018. Swarm of small robots moving in an “organic” manner.
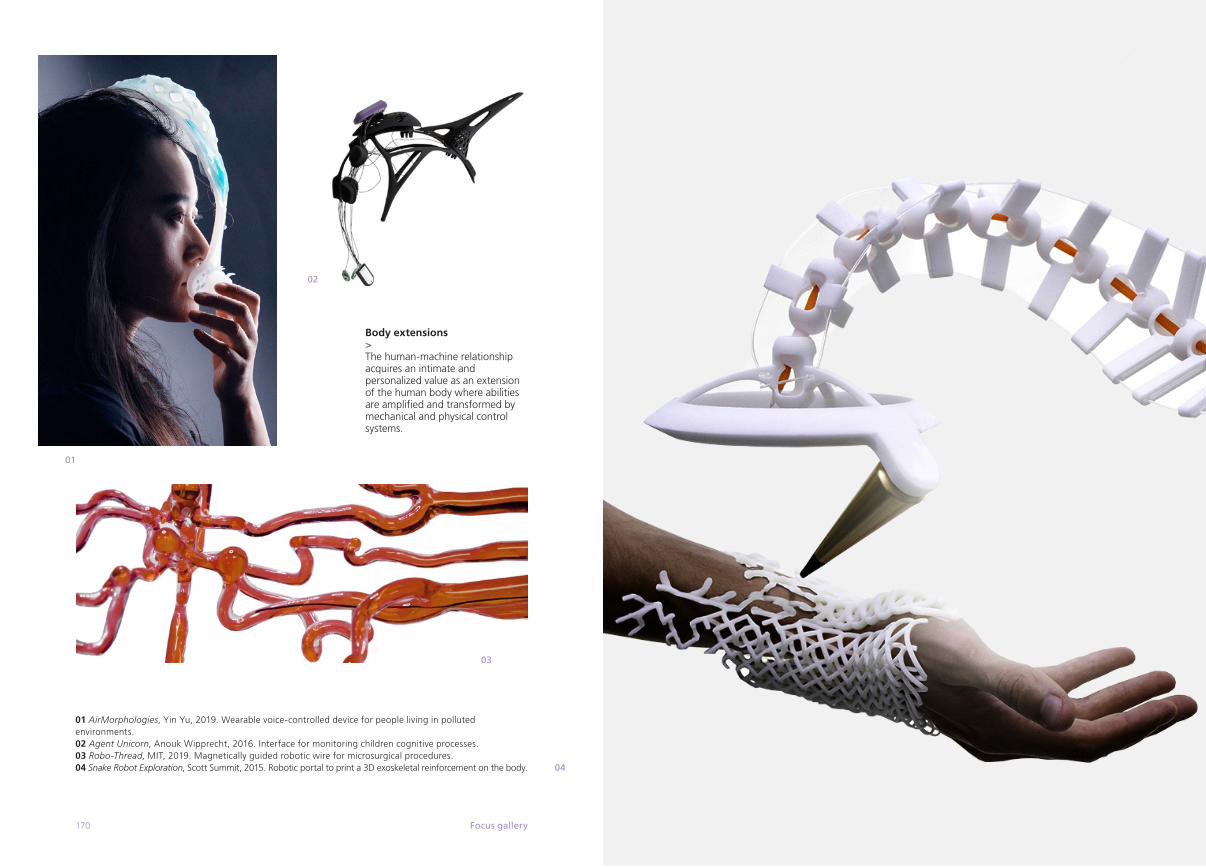
170
01
02
03
04
Focus gallery
Body extensions> The human-machine relationship acquires an intimate and personalized value as an extension of the human body where abilities are amplified and transformed by mechanical and physical control systems.
01 AirMorphologies, Yin Yu, 2019. Wearable voice-controlled device for people living in polluted environments. 02 Agent Unicorn, Anouk Wipprecht, 2016. Interface for monitoring children cognitive processes. 03 Robo-Thread, MIT, 2019. Magnetically guided robotic wire for microsurgical procedures. 04 Snake Robot Exploration, Scott Summit, 2015. Robotic portal to print a 3D exoskeletal reinforcement on the body.
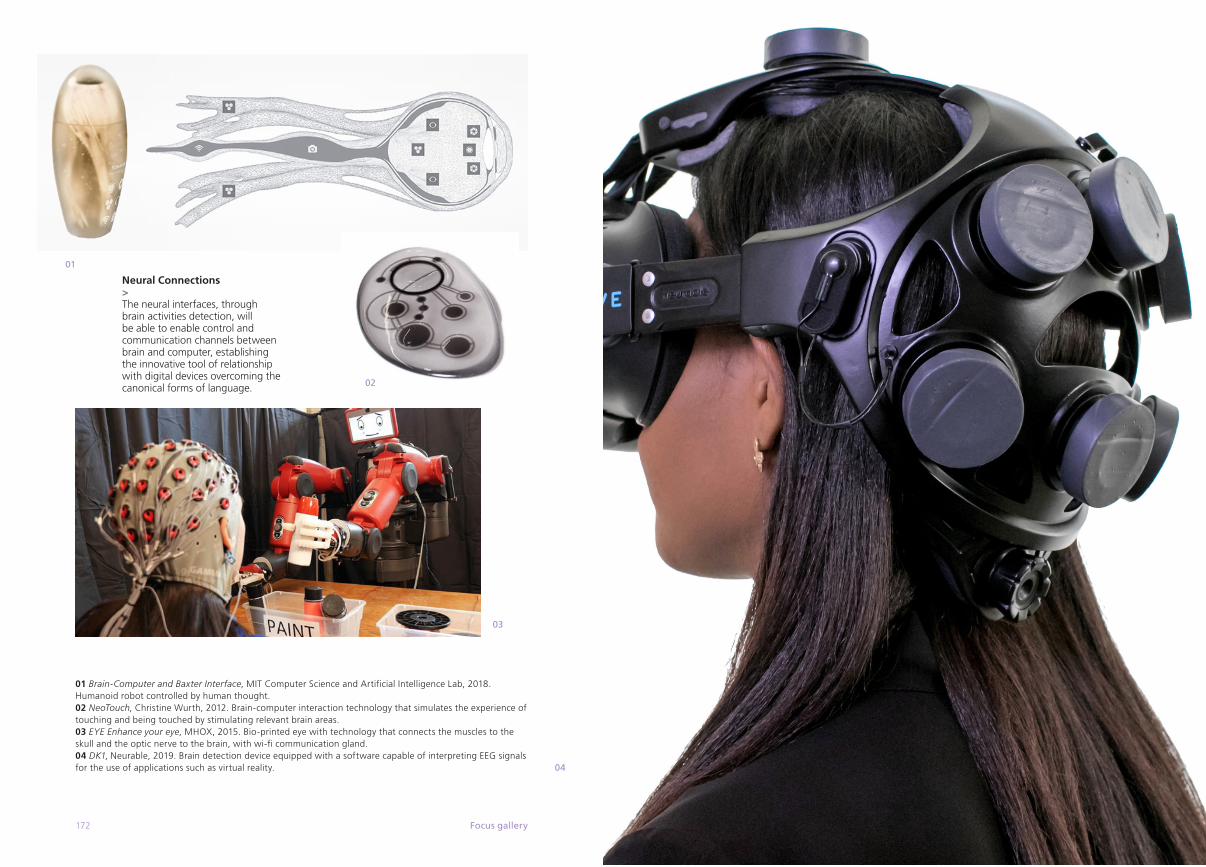
172
01
03
04
Focus gallery
02
Neural Connections > The neural interfaces, through brain activities detection, will be able to enable control and communication channels between brain and computer, establishing the innovative tool of relationship with digital devices overcoming the canonical forms of language.
01 Brain-Computer and Baxter Interface, MIT Computer Science and Artificial Intelligence Lab, 2018. Humanoid robot controlled by human thought. 02 NeoTouch, Christine Wurth, 2012. Brain-computer interaction technology that simulates the experience of touching and being touched by stimulating relevant brain areas. 03 EYE Enhance your eye, MHOX, 2015. Bio-printed eye with technology that connects the muscles to the skull and the optic nerve to the brain, with wi-fi communication gland. 04 DK1, Neurable, 2019. Brain detection device equipped with a software capable of interpreting EEG signals for the use of applications such as virtual reality.
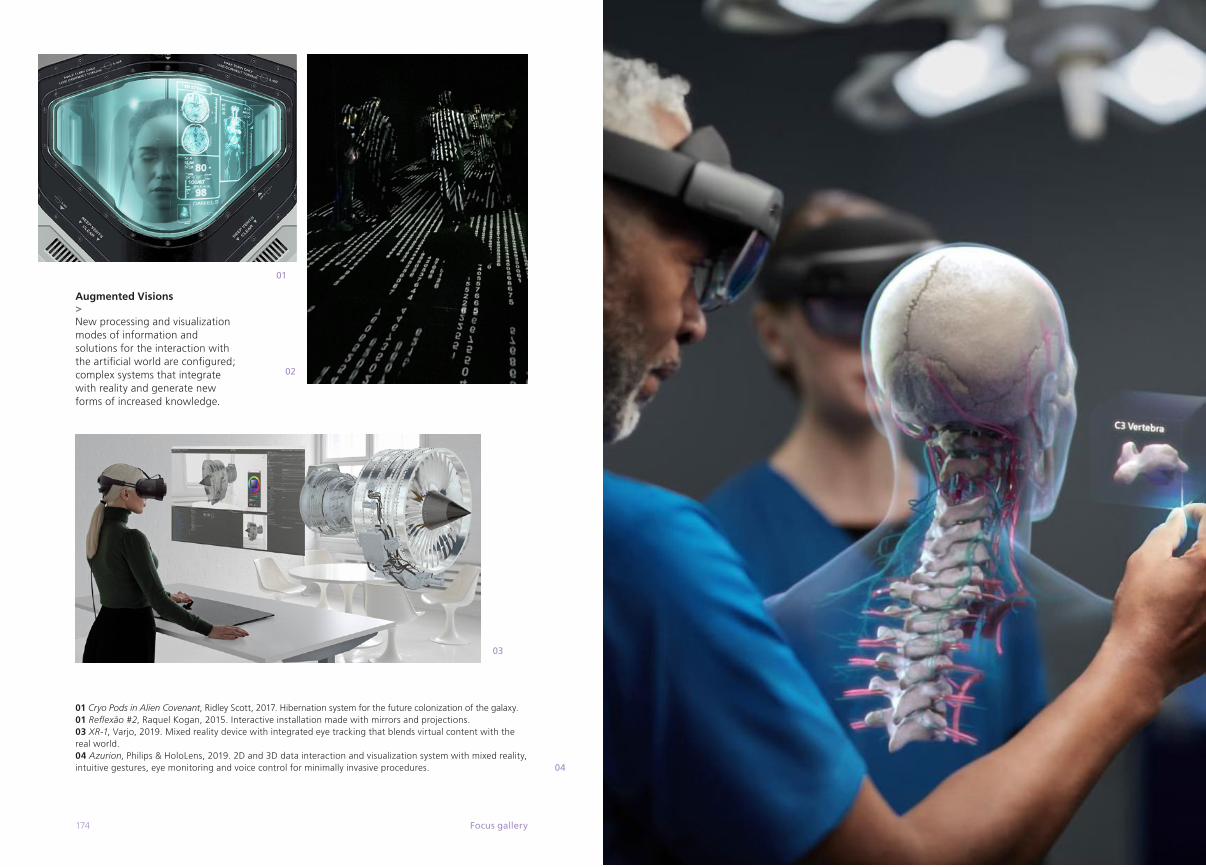
174
01
04
Focus gallery
02
03
Augmented Visions> New processing and visualization modes of information and solutions for the interaction with the artificial world are configured; complex systems that integrate with reality and generate new forms of increased knowledge.
01 Cryo Pods in Alien Covenant, Ridley Scott, 2017. Hibernation system for the future colonization of the galaxy.01 Reflexão #2, Raquel Kogan, 2015. Interactive installation made with mirrors and projections.03 XR-1, Varjo, 2019. Mixed reality device with integrated eye tracking that blends virtual content with the real world.04 Azurion, Philips & HoloLens, 2019. 2D and 3D data interaction and visualization system with mixed reality, intuitive gestures, eye monitoring and voice control for minimally invasive procedures.
Maestri
Maestri gallery > p.190/p.205
Tonino Paris
The Bauhaus narrated by its protagonists
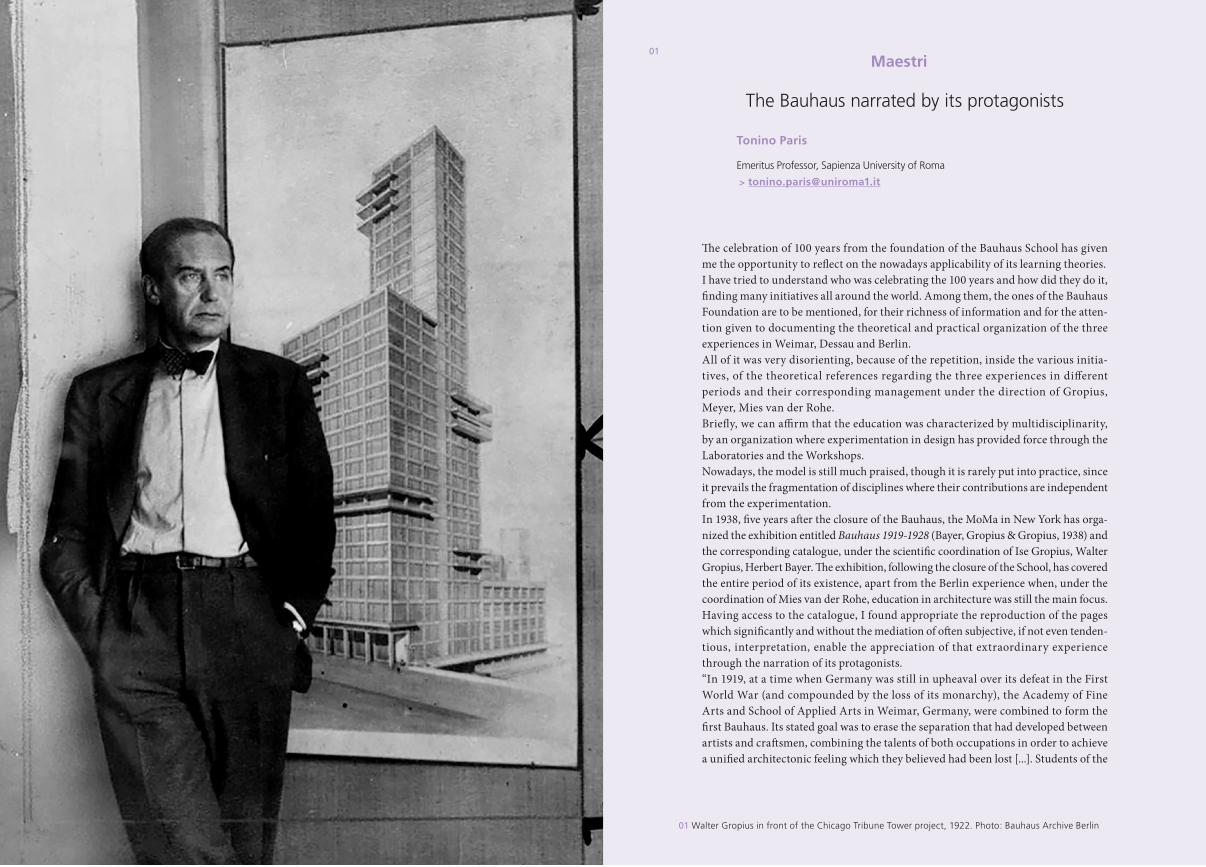
Maestri01
01
The celebration of 100 years from the foundation of the Bauhaus School has given me the opportunity to reflect on the nowadays applicability of its learning theories. I have tried to understand who was celebrating the 100 years and how did they do it, finding many initiatives all around the world. Among them, the ones of the Bauhaus Foundation are to be mentioned, for their richness of information and for the atten-tion given to documenting the theoretical and practical organization of the three experiences in Weimar, Dessau and Berlin.All of it was very disorienting, because of the repetition, inside the various initia-tives, of the theoretical references regarding the three experiences in different periods and their corresponding management under the direction of Gropius, Meyer, Mies van der Rohe.Briefly, we can affirm that the education was characterized by multidisciplinarity, by an organization where experimentation in design has provided force through the Laboratories and the Workshops.Nowadays, the model is still much praised, though it is rarely put into practice, since it prevails the fragmentation of disciplines where their contributions are independent from the experimentation.In 1938, five years after the closure of the Bauhaus, the MoMa in New York has orga-nized the exhibition entitled Bauhaus 1919-1928 (Bayer, Gropius & Gropius, 1938) and the corresponding catalogue, under the scientific coordination of Ise Gropius, Walter Gropius, Herbert Bayer. The exhibition, following the closure of the School, has covered the entire period of its existence, apart from the Berlin experience when, under the coordination of Mies van der Rohe, education in architecture was still the main focus.Having access to the catalogue, I found appropriate the reproduction of the pages which significantly and without the mediation of often subjective, if not even tenden-tious, interpretation, enable the appreciation of that extraordinary experience through the narration of its protagonists.“In 1919, at a time when Germany was still in upheaval over its defeat in the First World War (and compounded by the loss of its monarchy), the Academy of Fine Arts and School of Applied Arts in Weimar, Germany, were combined to form the first Bauhaus. Its stated goal was to erase the separation that had developed between artists and craftsmen, combining the talents of both occupations in order to achieve a unified architectonic feeling which they believed had been lost [...]. Students of the
The Bauhaus narrated by its protagonists
Walter Gropius in front of the Chicago Tribune Tower project, 1922. Photo: Bauhaus Archive Berlin
Tonino Paris
Emeritus Professor, Sapienza University of Roma
181180 MaestriDesign and Technologies
Bauhaus were to abandon the framework of design standards that had been developed by traditional European Schools and experiment with natural materials, abstract forms, and their own intuitions. Although the school’s output was initially Expres-sionist in nature, by 1922 it had evolved into something more in line with the rising International Style” (Fiederer, 2017).
From the first proclamation of the Weimar Bauhaus:The complete building is the final aim of the visual arts. Their noblest function was once the decoration of buildings. Today they exist in isolation, from which they can be rescued only through the conscious, cooperative effort of all craftsmen. Architects, painters and sculptors must recognize anew the composite character of a building as an entity. Only then will their work be imbued with the architectonic spirit which it has lost as “Salon art”.
Architects, sculptors, painters, we must all turn to the craftsArt is not a “profession”. There is no essential difference between the artist and the craftsman. The artist is an exalted craftsman. [...] Yet, proficiency in his craft is essen-tial to every artist. Therein lies a source of creative imagination. Let us create a new guild of craftsmen, without the class distinctions which raise an arrogant barrier between the craftsman and the artist. Let us conceive and create together the new building of the future, which will embrace architecture and sculp-ture and painting in a unity [...].
Who were the teachers? [During the war there were some free positions for the staff of the two schools] (the Academy of Pictorial Art and the Academy of Arts and Crafts) which Gropius later united in the Bauhaus. This enabled him to have three masters appointed at the very beginning: Johannes Itten, Lyonel Feinenger and Geherard Matcks in May, 1919. They were joined later by Adolf Meyer, 1919, [...] Paul Klee, January, 1921, Oscar Schlemmer, April, 1921, Wassily Kandinsky, June, 1922, and László Moholy-Nagy, 1923. Replacement of certain members of the old staff, who did not fit into the new educational line at the Bauhaus, led to bitter controversy with the older generation of artists in Weimar.
Where did the students come from? The students of the Weimar Bauhaus came from all over Germany, north and south, and from Austria. They were [aged between] seventeen to forty years old [...]. Two-thirds of them were men, half of whom had served in the army during the last years of the Great War. Most of the students had to earn their living, and therefore Gropius persuaded the Weimar Ministry of Education to cancel tuition fees. Further-more, he managed to give some financial support to those students who produced saleable goods in the Bauhaus workshops.
From a student’s letter When I saw the first Bauhaus proclamation, ornamented with Feininger’s woodcut, I made inquiries [regarding] what the Bauhaus really was. I was told that “during the entrance examinations every applicant is locked up in a dark room [...] to get him into a state of agitation. Him being admitted depends on how well he describes his reactions”. This report, although it exaggerated the actual facts, fired my enthusiasm. My economic future was far from assured, but I decided to join the Bauhaus at once. It was during the post-war years, and to this day I wonder what most Bauhaus members lived on. But the happiness and fullness of those years made us forget [about] our poverty. The Bauhaus members came from all social classes. They made a vivid appe-arance, some still in uniform, some barefoot or in sandals, some with the long beards of artists or ascetics. Some came from the youth movements.
The theory and organization of the Bauhaus by Walter Gropius[1]
The dominant spirit of our epoch is already recognizable although its form is not yet clearly defined. The old dualistic world-concept which envisaged the ego in opposition to the universe is rapidly losing ground. [In its place, the idea of a universal unity in which all opposing forces exist in a state of absolute balance, is rising]. This [...] endows creative effort with a fundamental [...] meaning. [...] We perceive every form as the embodiment of an idea, every piece of work as a manifestation of our innermost selves. [...] Mechanized work is lifeless [...]. So long, however, as the machine-economy remains an end in itself rather than a means of freeing the intellect from the burden of mechanical labor, the individual will remain enslaved and society will remain disordered. The solution depends on a change in the individual’s attitude toward his work [...] and the acceptance of this new principle is of decisive importance for new creative work.
The decadence of architecture The character of an epoch is epitomized in its buildings. [...] A vital architectural spirit, rooted in the entire life of a people, represents the interrelation of all phases of the creative effort, [of] all arts, [of] all techniques. Architecture today has forfeited its status as a unifying art. [...]New structural elements develop very slowly, for the evolution of [architectural form is not only dependent upon] [...] technical and material resources, but also upon the emergence of new philosophical concepts deriving from a series of intuitive percep-tions. The evolution of form, therefore, lags far behind the ideas which engender it. [...]
The Academy[...] It [shut the artist off] from the world of industry and handicraft, and thus brought about his complete isolation from the community. In vital epochs, on the other hand, the artist enriched all the arts and crafts of a community because he had a part in its vocational life, and because he acquired through actual practice as
183182 MaestriDesign and Technologies
much [expertise] and understanding as any other worker who began at the bottom and worked his way up. [However], lately the artist has been misled by the fatal and arrogant fallacy, fostered by the state, that art is a profession which can be mastered [through] study. Schooling alone can never produce art! Whether the finished product is an exercise in ingenuity or a work of art depends on the talent of the individual who creates it. This quality cannot be taught and cannot be learned. On the other hand, manual dexterity and the thorough knowledge which is a neces-sary foundation for all creative effort, whether the workman’s or the artist’s, can be taught and learned.
Isolation of the artist [...] With the development of the academies genuine folk art died away. [...] In the 19th Century this dwindled to the production of individual paintings totally divorced from any relation to an architectural entity. The second half of the 19th Century saw the beginning of a protest against the devitalising influence of the academies. Ruskin and Morris in England, van de Velde in Belgium, Olbrich, Behrens and others in Germany, and, finally, the Deutsche Werkbund, all sought, and in the end discovered, the basis of a reunion between creative artists and the industrial world. In Germany, arts and crafts (Kunstgewerbe) schools were founded for the purpose of developing, in a new generation, talented individuals trained in industry and handicraft. But the academy was too firmly established: practical training never advanced beyond dilettantism, and [...] “design” remained in the foreground. The foundations of this attempt were laid neither wide enough nor deep enough to avail much against the old I’art pour I’art attitude, so alien to, and so far removed from life.
Dearth of industrial designersMeanwhile, the crafts – and more especially the industries – began to cast about for artists. A demand arose for products outwardly attractive as well as technically and economically acceptable. The technicians could not satisfy it. [Therefore, the] manufacturers started to buy so-called “artistic designs”. [...] At the same time, the merchants and technicians lacked the insight to realize that appearance, efficiency and expense could be simultaneously controlled only by planning and producing the industrial object with the careful cooperation of the artist respon-sible for its design. Since there was a dearth of artists adequately trained for such work, it was logical to establish the following basic requirements for the future training of all gifted individuals: a thorough practical, manual training in work-shops actively engaged in production, coupled with sound theoretical instruction in the laws of design.
Analysis of the designing process The objective of all creative effort in the visual arts is to give form to space.... But what is space, how can it be understood and given a form?
...Although we may achieve an awareness of the infinite, we can give form to space only with finite means. We become aware of space through our undivided Ego, through the simultaneous activity of soul, mind and body. [...] Through his intui-tion, through his metaphysical powers, man discovers the immaterial space of inward vision and inspiration. This conception of space demands realization in the material world, a realization which is accomplished by the brain and the hands. [...] Conception and visualization are always simultaneous. Only the individual’s capa-city to feel, to know and to execute varies in degree and in speed. True creative work can be done only by the man whose knowledge and mastery of the physical laws of statics, dynamics, optics, acoustics [endow him with the capability] to give life and shape to his inner vision. [...]
The Bauhaus at Weimar [...] In 1915, during the war, the author had been summoned to an audience with the Grand Duke of Saxe-Weimar to discuss his taking over the Academy for Arts and Crafts from the distinguished Belgian architect, Henry van de Velde, who had himself suggested Gropius as his successor. Having asked for, and been accorded, full [control regarding] reorganization, in the spring of 1919 the author assumed the directorship of the Grand Ducal Saxon Academy for Pictorial Art (Grossherzogliche Sächsische Hochschule für Bildende Kunst) as well as of the Grand Ducal Saxon Academy for Arts and Crafts (Grossherzogliche Sächsische Kunstgewerbeschule) and united them under the new name of “State Bauhaus” (Staatliches Bauhaus). The theoretical curri-culum of an art academy combined with the practical curriculum of an arts and crafts school was to constitute the basis of a comprehensive system for gifted students. Its credo was: «The Bauhaus strives to coordinate all creative effort, to achieve, in a new architecture, the unification of all training in art and design. The ultimate, if distant, goal of the Bauhaus is the collective work of art – the Building – in which no barriers exist between the structural and the decorative arts».The guiding principle of the Bauhaus was therefore the idea of creating a new unity through the welding together of many “arts” and movements: a unity having its basis in Man himself [...].
Supplementary instructionLectures in fields relating to art and science, past and present.The curriculum includes three departments:1. The preliminary course, lasting half a year. Elementary instruction in problems of form, combined with practical experiments with different materials in the workshops for beginners.Result: admission to one of the workshops.2. Instruction in a craft in one of the workshops after signing legal articles of appren-ticeship; advanced instruction in form. Three-year course. Result: Journeyman’s Diploma of the Chamber of Crafts (Gesellenbrief der Handwerkskammer) and, under certain circumstances, Diploma of the Bauhaus.
185184 MaestriDesign and Technologies
3. Instruction in architecture.Practical participation in buildings under construction and, for especially talented journeymen, independent architectural training in the Bauhaus Research Department.Duration: depending on achievement and special circumstances. Architectural acti-vity and experimental work represent a continuation of instruction in crafts and form.Result: Master’s Diploma of the Chamber of Crafts and, under special circumstances, Diploma of the Bauhaus.During the entire curriculum a practical course in the fundamental relationships of sound, color and form is followed [...].
The Preliminary Course (Vorlehr)[2]
Practical and theoretical studies are carried on simultaneously in order to release the creative powers of the student, to help him grasp the physical nature of materials and the basic laws of design. [...] Observation and representation – with the intention of showing the desired identity of Form and Content – define the limits of the preliminary course. Its chief function is to liberate the individual by breaking down conventional patterns of thought in order to make way [to] personal experiences and discoveries which will enable him to see his own potentialities and limitations. For this reason, collective work is not essential in the preliminary course. Both subjective and objective observation will be cultivated [...]. Above all else, the discovery and proper [evaluation] of the indivi-dual’s means of expression shall be sought out. The creative possibilities of individuals vary. One finds his elementary expressions in rhythm, another in light and shade, a third in color, a fourth in materials, a fifth in sound, a sixth in proportion, a seventh in volumes or abstract space, an eighth in the relations between one and another [...].All the work produced in the preliminary course is done under the inf luence of instructors. [...]
Instruction in crafts and form problemsIn earlier centuries, when there was no academic instruction in the crafts or arts, students were taught independently by a master who was a craftsman as well as an artist. [...] in our time such creative versatility no longer exists, and it is therefore impossible for one man to undertake a student’s entire art education. [...] Thus, doubly trained, a future generation of creatively gifted workers may once more achieve a new productive coordination and may gradually become indispensable collaborators in the working life of the people. With this in mind, the Bauhaus has ruled (1) that every apprentice and journeyman is taught by two masters, a craftsman and an artist, who work in close cooperation; (2) that instruction in crafts and in the theory of form are fundamental: no apprentice or journeyman can be excused from either. [...]
Instruction in crafts Training in a craft is a prerequisite for collective work in architecture. This training purposely combats the dilettantism of previous generations in the applied arts. Every
apprentice, by signing the articles issued by the Chamber of Crafts, engages himself to work through the lawfully prescribed period of apprenticeship. The teaching of a craft serves solely to train the hand and to ensure technical proficiency; it is by no means an end in itself. Its aim is to add to a many-sided education rather than to develop the specialized craftsman.The Bauhaus believes the machine to be our modern medium of design [...]. However, it would be senseless to launch a gifted apprentice into industry without preparation in a craft and hope thereby to reestablish the artist’s lost contact with the world of production. He would be stifled by the materialistic and one-sided outlook [which prevails] in factories today. A craft, however, cannot [get into conflict] with the feeling for work which, as an artist, he inevitably has, and it is therefore his best opportunity for practical training.The main difference between factory production and handicraft lies not in [the machine’s superiority as an instrument of technical precision over more primitive tools], but in the fact that in the factory each operation involved in manufacturing a product is performed by a different man, whereas the craft product is made entirely by one person. [...]Craftsmanship and industry are today steadily approaching one another and are destined [to eventually merge] into one. Such a new productive union will give every individual that understanding of and desire for cooperation which is essential to creative work. In this union, the old craft workshops will develop into industrial laboratories: from their [experimentation, standards for industrial production will evolve].The teaching of a craft is meant to prepare for designing for mass production. Starting with the simplest tools and least complicated jobs, [the student] gradually acquires the ability to master more intricate problems and to work with machinery, while at the same time he keeps in touch with the entire process of production from start to finish, whereas the factory worker never gets beyond the knowledge of one phase of the process. Therefore, the Bauhaus is consciously seeking contacts with existing industrial enterprises, for the sake of mutual stimulation.From these contacts with industry, the apprentice and, later, the journeyman, learn not only to extend their technical experience but also to consider, in carrying out their work, the unavoidable demands which industry makes on the individual to economize on time and means. In the same measure, the academic superciliousness of another day constantly dwindles, and respect for hard realities unites individuals engaged in a common work. After three years of thorough training, the apprentice undergoes a work-test in the presence of a committee of established craftsmen. Having passed this, he becomes a publicly certified journeyman. Every journeyman at the Bauhaus who is publicly certified is entitled, as soon as he considers himself sufficiently advanced, to a further test as “Bauhaus journeyman”; the requirements of this test are more severe than the public test, especially [regarding] the journeyman’s creative ability.
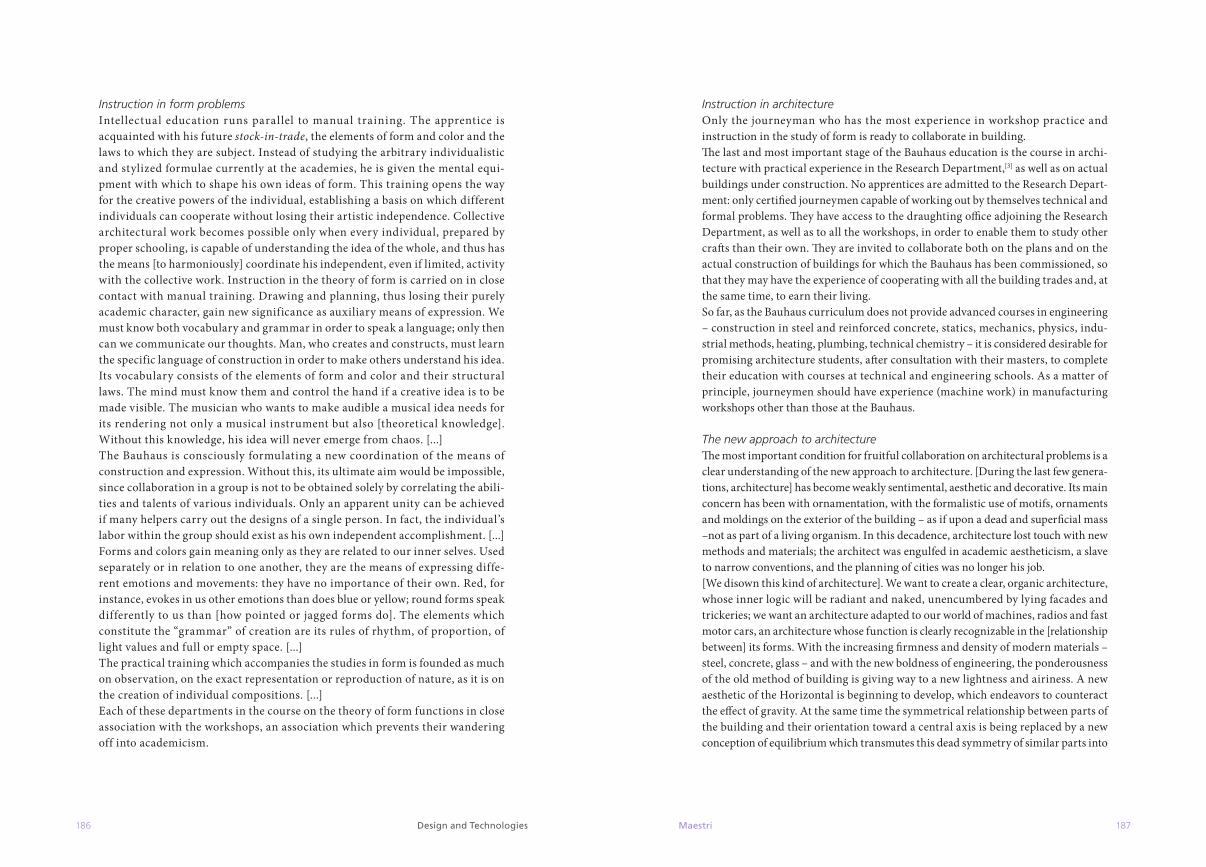
187186 MaestriDesign and Technologies
Instruction in form problemsIntellectual education runs parallel to manual training. The apprentice is acquainted with his future stock-in-trade, the elements of form and color and the laws to which they are subject. Instead of studying the arbitrary individualistic and stylized formulae currently at the academies, he is given the mental equi-pment with which to shape his own ideas of form. This training opens the way for the creative powers of the individual, establishing a basis on which different individuals can cooperate without losing their artistic independence. Collective architectural work becomes possible only when every individual, prepared by proper schooling, is capable of understanding the idea of the whole, and thus has the means [to harmoniously] coordinate his independent, even if limited, activity with the collective work. Instruction in the theory of form is carried on in close contact with manual training. Drawing and planning, thus losing their purely academic character, gain new significance as auxiliary means of expression. We must know both vocabulary and grammar in order to speak a language; only then can we communicate our thoughts. Man, who creates and constructs, must learn the specific language of construction in order to make others understand his idea. Its vocabulary consists of the elements of form and color and their structural laws. The mind must know them and control the hand if a creative idea is to be made visible. The musician who wants to make audible a musical idea needs for its rendering not only a musical instrument but also [theoretical knowledge]. Without this knowledge, his idea will never emerge from chaos. [...]The Bauhaus is consciously formulating a new coordination of the means of construction and expression. Without this, its ultimate aim would be impossible, since collaboration in a group is not to be obtained solely by correlating the abili-ties and talents of various individuals. Only an apparent unity can be achieved if many helpers carry out the designs of a single person. In fact, the individual’s labor within the group should exist as his own independent accomplishment. [...]Forms and colors gain meaning only as they are related to our inner selves. Used separately or in relation to one another, they are the means of expressing diffe-rent emotions and movements: they have no importance of their own. Red, for instance, evokes in us other emotions than does blue or yellow; round forms speak differently to us than [how pointed or jagged forms do]. The elements which constitute the “grammar” of creation are its rules of rhythm, of proportion, of light values and full or empty space. [...] The practical training which accompanies the studies in form is founded as much on observation, on the exact representation or reproduction of nature, as it is on the creation of individual compositions. [...]Each of these departments in the course on the theory of form functions in close association with the workshops, an association which prevents their wandering off into academicism.
Instruction in architectureOnly the journeyman who has the most experience in workshop practice and instruction in the study of form is ready to collaborate in building.The last and most important stage of the Bauhaus education is the course in archi-tecture with practical experience in the Research Department,[3] as well as on actual buildings under construction. No apprentices are admitted to the Research Depart-ment: only certified journeymen capable of working out by themselves technical and formal problems. They have access to the draughting office adjoining the Research Department, as well as to all the workshops, in order to enable them to study other crafts than their own. They are invited to collaborate both on the plans and on the actual construction of buildings for which the Bauhaus has been commissioned, so that they may have the experience of cooperating with all the building trades and, at the same time, to earn their living.So far, as the Bauhaus curriculum does not provide advanced courses in engineering – construction in steel and reinforced concrete, statics, mechanics, physics, indu-strial methods, heating, plumbing, technical chemistry – it is considered desirable for promising architecture students, after consultation with their masters, to complete their education with courses at technical and engineering schools. As a matter of principle, journeymen should have experience (machine work) in manufacturing workshops other than those at the Bauhaus.
The new approach to architectureThe most important condition for fruitful collaboration on architectural problems is a clear understanding of the new approach to architecture. [During the last few genera-tions, architecture] has become weakly sentimental, aesthetic and decorative. Its main concern has been with ornamentation, with the formalistic use of motifs, ornaments and moldings on the exterior of the building – as if upon a dead and superficial mass –not as part of a living organism. In this decadence, architecture lost touch with new methods and materials; the architect was engulfed in academic aestheticism, a slave to narrow conventions, and the planning of cities was no longer his job. [We disown this kind of architecture]. We want to create a clear, organic architecture, whose inner logic will be radiant and naked, unencumbered by lying facades and trickeries; we want an architecture adapted to our world of machines, radios and fast motor cars, an architecture whose function is clearly recognizable in the [relationship between] its forms. With the increasing firmness and density of modern materials – steel, concrete, glass – and with the new boldness of engineering, the ponderousness of the old method of building is giving way to a new lightness and airiness. A new aesthetic of the Horizontal is beginning to develop, which endeavors to counteract the effect of gravity. At the same time the symmetrical relationship between parts of the building and their orientation toward a central axis is being replaced by a new conception of equilibrium which transmutes this dead symmetry of similar parts into
189188 MaestriDesign and Technologies
an asymmetrical, yet rhythmical balance. The spirit of the new architecture wants to overcome inertia, to balance contrasts.Since architecture is a collective art, its welfare depends on the whole community. As an extreme instance, the monument is only significant when it springs from the will of the whole nation. This will does not yet exist today. But even the construction of absolutely necessary housing is at a standstill [because of] the makeshift economies of our time. [...]
Standardization of unitsFor this reason, the Bauhaus has set itself the task of creating a center for experimen-tation where it will try to assemble the achievements of economical, technical and formal research and to apply them to problems of domestic architecture in an effort to combine the greatest possible standardization with the greatest possible variation of form. Therefore, the buildings, which are to be thought of as outgrowths of modern technique and design, may be conceived as [assemblies] of prefabricated and stan-dardized parts so applied as to fulfill the varying requirements of those to be housed.The artist and the technician must collaborate in carrying out this task. [...] Such cooperation would be a real demonstration of farsightedness. [...] The Bauhaus has taken the first steps toward such collaboration with the building of an experimental house at its 1923 exhibition, which was an actual demonstration of new conceptions of housing as well as of new technical methods. Every architect must understand the significance of the city in order to be able to engage actively in city planning; he must recognize “simplicity in multiplicity” as a guiding principle in the shaping of its character. [...] All the building parts should be functional limbs of the comprehensive organism which depends simultaneously on building, streets and means of transportation. The investigation of these problems constitutes the final stage of the course in buil-ding. A student who has achieved technical perfection and [acquired everything] that the Bauhaus can teach him can be certified a master.
The goal of the Bauhaus curriculum Thus, the culminating point of the Bauhaus teaching is a demand for a new and powerful working correlation between all the processes of creation. [...]For this reason, the basis of collective education must be sufficiently broad to permit the development of every kind of talent. [Since there is no universally applicable method for the discovery of talent, in the course of his development, the individual must find for himself the best suited field of activity within the community circle]. [...]
Conclusion: the Bauhaus in education An organization based on new principles [can easily become] isolated if it does not constantly maintain a thorough understanding of all the questions agitating the rest of the world. In spite of all the practical difficulties, the basis of the growing
work of the Bauhaus can never be too broad. Its responsibility is to educate men and women to understand the world in which they live and to invent and create forms symbolizing that world. For this reason, the educational field must be enlarged on all sides and extended into neighboring fields, so that the effects of new experiments may be studied. The education of children when they are young and still [pristine] is of great importance. The new types of schools emphasizing practical exercises, such as the Montessori schools, provide an excellent preparation for the constructive program of the Bauhaus since they develop the entire human organism. [...] During the first four years of constructive work, many ideas and problems have evolved from the original idea of the Bauhaus. They have been tested in the face of fierce opposition. Their fruitfulness and salutary effect on all phases of modern life have been demonstrated.
[1] Translation of Idee und Aufbau des Staatlichen Bauhauses Weimar. Published in 1923 at the Bauhausverlag, Munich, during the fourth year of the Bauhaus at Weimar. A few paragraphs and occasional sentences have been omitted, for the sake of brevity. Many of the subheadings have been added.
[2] The preliminary course was developed by Johannes Itten; he continued and enlarged at the Bauhaus the courses he had already been giving in 1918 in Vienna.
[3] The Research Department for experimental work was only partially realized, due to lack of space and funds.
References
> Bayer, H., Gropius, W., & Gropius, I. (Eds.). (1938). Bauhaus, 1919-1928. New York: The Museum of Modern Art.
> Fiederer, L. AD Classics: Haus am Horn/Georg Muche. (2017, 12 june). ArchDaily. Retrieved from https://www.archdaily.com/873082/ad-classics-haus-am-horn-germany-georg-muche
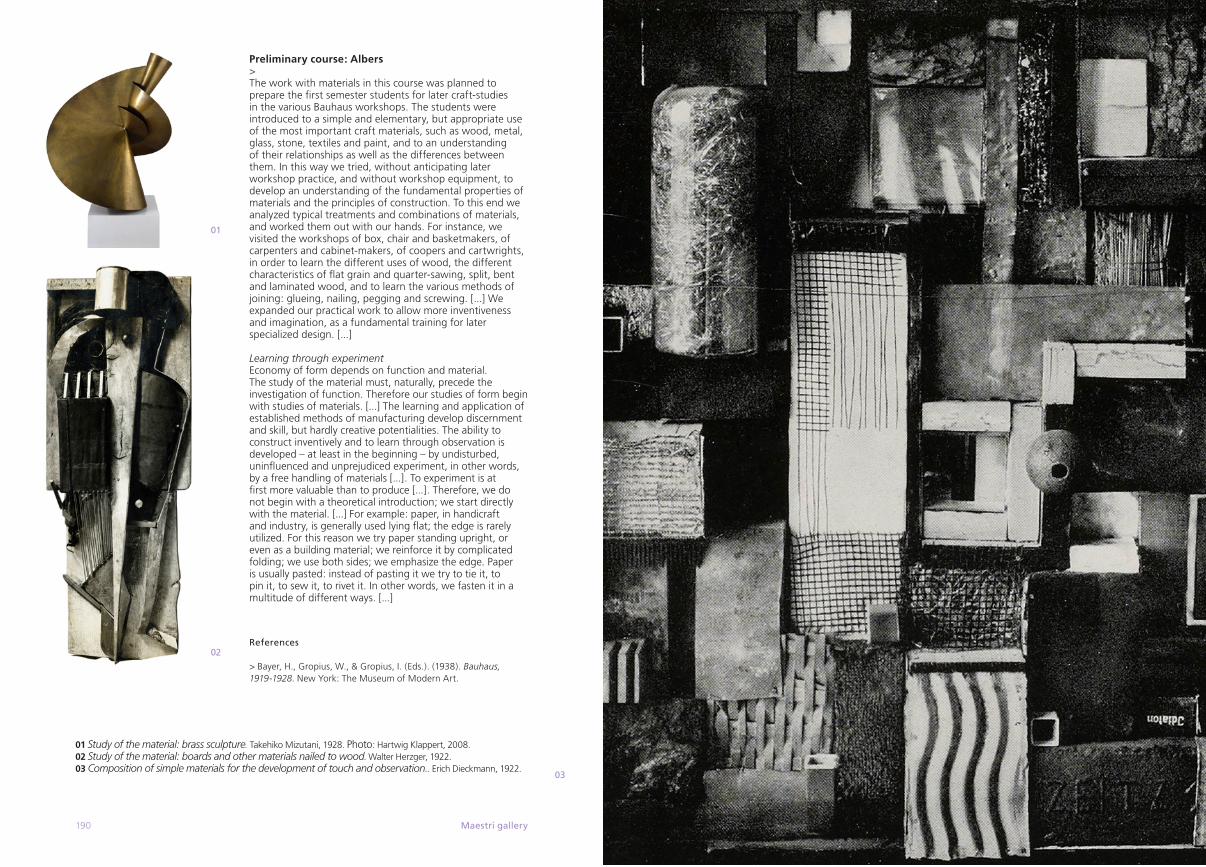
191190
03
01
02
Maestri gallery
Preliminary course: Albers > The work with materials in this course was planned to prepare the first semester students for later craft-studies in the various Bauhaus workshops. The students were introduced to a simple and elementary, but appropriate use of the most important craft materials, such as wood, metal, glass, stone, textiles and paint, and to an understanding of their relationships as well as the differences between them. In this way we tried, without anticipating later workshop practice, and without workshop equipment, to develop an understanding of the fundamental properties of materials and the principles of construction. To this end we analyzed typical treatments and combinations of materials, and worked them out with our hands. For instance, we visited the workshops of box, chair and basketmakers, of carpenters and cabinet-makers, of coopers and cartwrights, in order to learn the different uses of wood, the different characteristics of flat grain and quarter-sawing, split, bent and laminated wood, and to learn the various methods of joining: glueing, nailing, pegging and screwing. [...] We expanded our practical work to allow more inventiveness and imagination, as a fundamental training for later specialized design. [...]
Learning through experimentEconomy of form depends on function and material. The study of the material must, naturally, precede the investigation of function. Therefore our studies of form begin with studies of materials. [...] The learning and application of established methods of manufacturing develop discernment and skill, but hardly creative potentialities. The ability to construct inventively and to learn through observation is developed – at least in the beginning – by undisturbed, uninfluenced and unprejudiced experiment, in other words, by a free handling of materials [...]. To experiment is at first more valuable than to produce [...]. Therefore, we do not begin with a theoretical introduction; we start directly with the material. [...] For example: paper, in handicraft and industry, is generally used lying flat; the edge is rarely utilized. For this reason we try paper standing upright, or even as a building material; we reinforce it by complicated folding; we use both sides; we emphasize the edge. Paper is usually pasted: instead of pasting it we try to tie it, to pin it, to sew it, to rivet it. In other words, we fasten it in a multitude of different ways. [...]
References
> Bayer, H., Gropius, W., & Gropius, I. (Eds.). (1938). Bauhaus, 1919-1928. New York: The Museum of Modern Art.
01 Study of the material: brass sculpture. Takehiko Mizutani, 1928. Photo: Hartwig Klappert, 2008.02 Study of the material: boards and other materials nailed to wood. Walter Herzger, 1922. 03 Composition of simple materials for the development of touch and observation.. Erich Dieckmann, 1922.
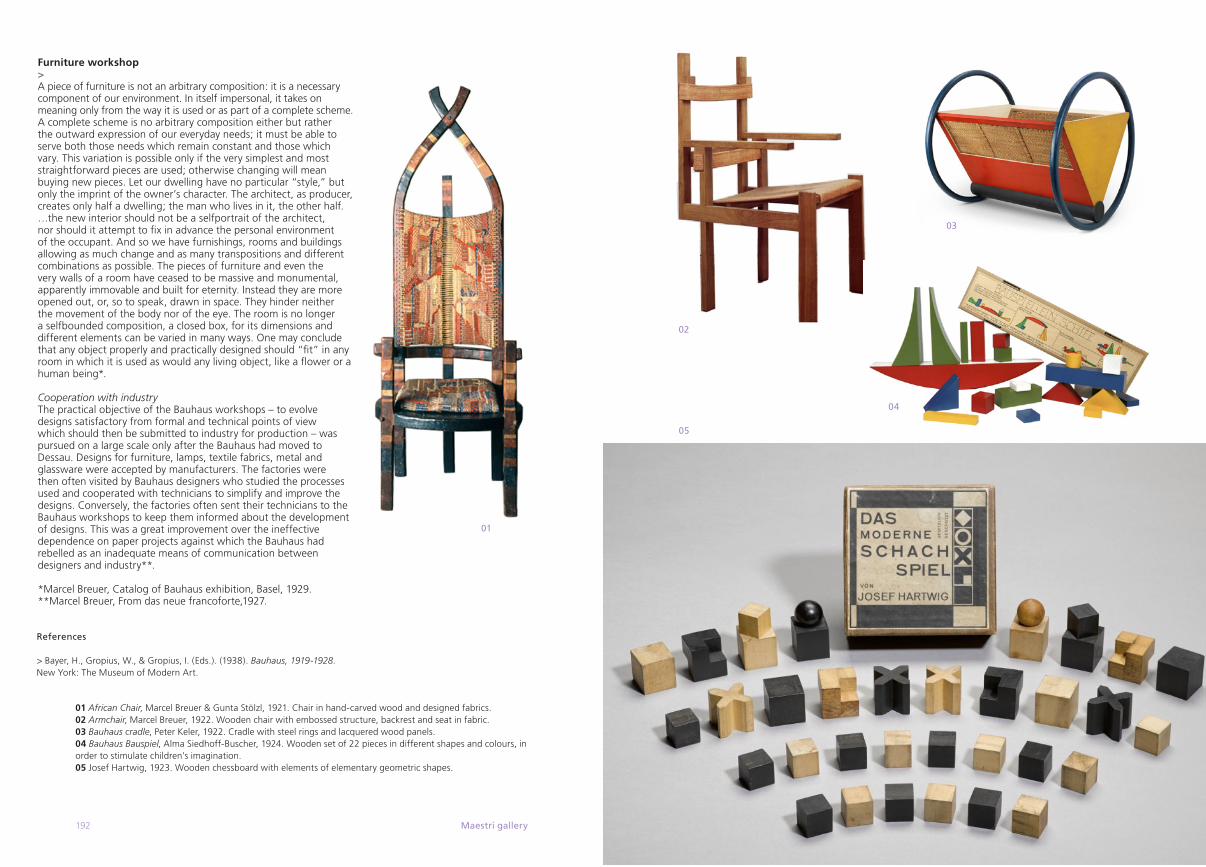
193192
05
01
02
Maestri gallery
03
04
Furniture workshop> A piece of furniture is not an arbitrary composition: it is a necessary component of our environment. In itself impersonal, it takes on meaning only from the way it is used or as part of a complete scheme.A complete scheme is no arbitrary composition either but rather the outward expression of our everyday needs; it must be able to serve both those needs which remain constant and those which vary. This variation is possible only if the very simplest and most straightforward pieces are used; otherwise changing will mean buying new pieces. Let our dwelling have no particular “style,” but only the imprint of the owner’s character. The architect, as producer, creates only half a dwelling; the man who lives in it, the other half.…the new interior should not be a selfportrait of the architect, nor should it attempt to fix in advance the personal environment of the occupant. And so we have furnishings, rooms and buildings allowing as much change and as many transpositions and different combinations as possible. The pieces of furniture and even the very walls of a room have ceased to be massive and monumental, apparently immovable and built for eternity. Instead they are more opened out, or, so to speak, drawn in space. They hinder neither the movement of the body nor of the eye. The room is no longer a selfbounded composition, a closed box, for its dimensions and different elements can be varied in many ways. One may conclude that any object properly and practically designed should “fit” in any room in which it is used as would any living object, like a flower or a human being*.
Cooperation with industryThe practical objective of the Bauhaus workshops – to evolve designs satisfactory from formal and technical points of view which should then be submitted to industry for production – was pursued on a large scale only after the Bauhaus had moved to Dessau. Designs for furniture, lamps, textile fabrics, metal and glassware were accepted by manufacturers. The factories were then often visited by Bauhaus designers who studied the processes used and cooperated with technicians to simplify and improve the designs. Conversely, the factories often sent their technicians to the Bauhaus workshops to keep them informed about the development of designs. This was a great improvement over the ineffective dependence on paper projects against which the Bauhaus had rebelled as an inadequate means of communication between designers and industry**.
*Marcel Breuer, Catalog of Bauhaus exhibition, Basel, 1929.**Marcel Breuer, From das neue francoforte,1927.
References
> Bayer, H., Gropius, W., & Gropius, I. (Eds.). (1938). Bauhaus, 1919-1928. New York: The Museum of Modern Art.
01 African Chair, Marcel Breuer & Gunta Stölzl, 1921. Chair in hand-carved wood and designed fabrics.02 Armchair, Marcel Breuer, 1922. Wooden chair with embossed structure, backrest and seat in fabric.03 Bauhaus cradle, Peter Keler, 1922. Cradle with steel rings and lacquered wood panels. 04 Bauhaus Bauspiel, Alma Siedhoff-Buscher, 1924. Wooden set of 22 pieces in different shapes and colours, in order to stimulate children’s imagination.05 Josef Hartwig, 1923. Wooden chessboard with elements of elementary geometric shapes.
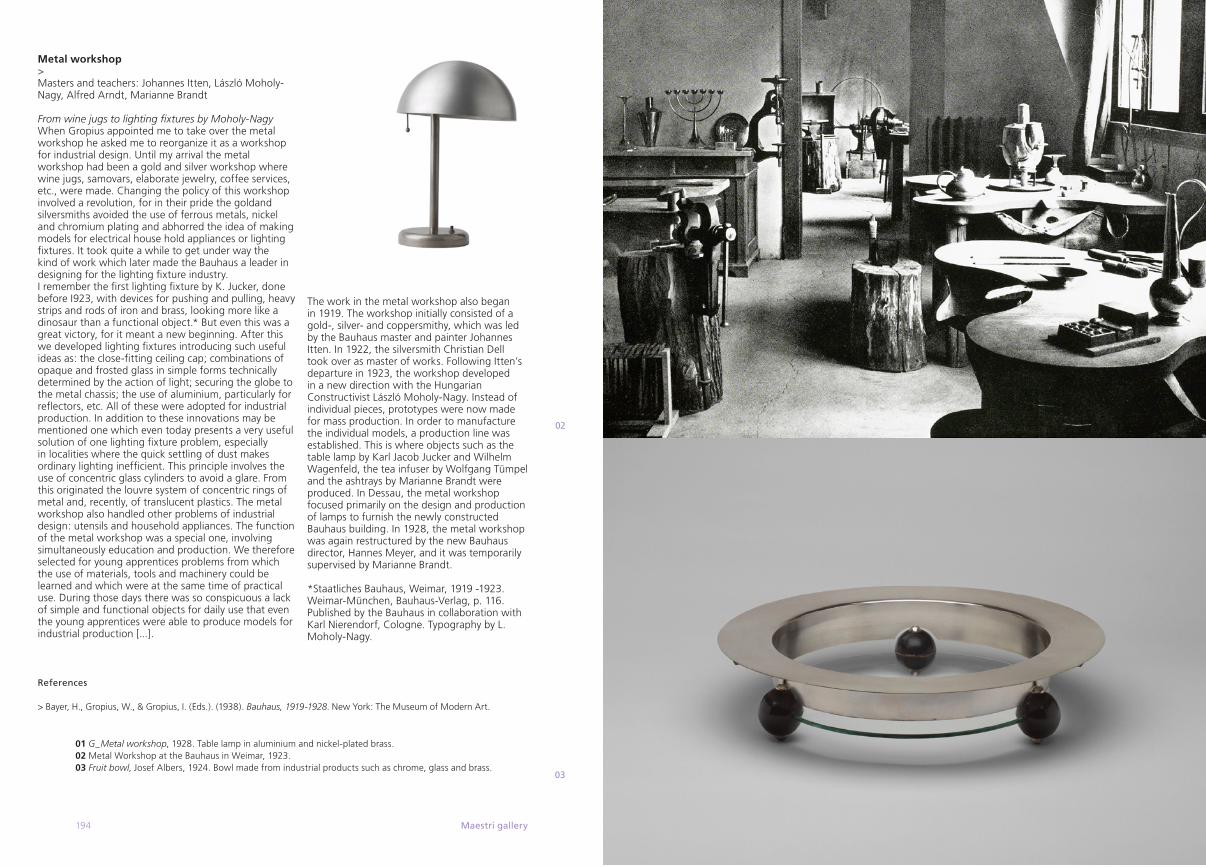
195194
03
02
Maestri gallery
Metal workshop > Masters and teachers: Johannes Itten, László Moholy-Nagy, Alfred Arndt, Marianne Brandt
From wine jugs to lighting fixtures by Moholy-NagyWhen Gropius appointed me to take over the metal workshop he asked me to reorganize it as a workshop for industrial design. Until my arrival the metal workshop had been a gold and silver workshop where wine jugs, samovars, elaborate jewelry, coffee services, etc., were made. Changing the policy of this workshop involved a revolution, for in their pride the goldand silversmiths avoided the use of ferrous metals, nickel and chromium plating and abhorred the idea of making models for electrical house hold appliances or lighting fixtures. It took quite a while to get under way the kind of work which later made the Bauhaus a leader in designing for the lighting fixture industry.I remember the first lighting fixture by K. Jucker, done before I923, with devices for pushing and pulling, heavy strips and rods of iron and brass, looking more like a dinosaur than a functional object.* But even this was a great victory, for it meant a new beginning. After this we developed lighting fixtures introducing such useful ideas as: the close-fitting ceiling cap; combinations of opaque and frosted glass in simple forms technically determined by the action of light; securing the globe to the metal chassis; the use of aluminium, particularly for reflectors, etc. All of these were adopted for industrial production. In addition to these innovations may be mentioned one which even today presents a very useful solution of one lighting fixture problem, especially in localities where the quick settling of dust makes ordinary lighting inefficient. This principle involves the use of concentric glass cylinders to avoid a glare. From this originated the louvre system of concentric rings of metal and, recently, of translucent plastics. The metal workshop also handled other problems of industrial design: utensils and household appliances. The function of the metal workshop was a special one, involving simultaneously education and production. We therefore selected for young apprentices problems from which the use of materials, tools and machinery could be learned and which were at the same time of practical use. During those days there was so conspicuous a lack of simple and functional objects for daily use that even the young apprentices were able to produce models for industrial production [...].
The work in the metal workshop also began in 1919. The workshop initially consisted of a gold-, silver- and coppersmithy, which was led by the Bauhaus master and painter Johannes Itten. In 1922, the silversmith Christian Dell took over as master of works. Following Itten’s departure in 1923, the workshop developed in a new direction with the Hungarian Constructivist László Moholy-Nagy. Instead of individual pieces, prototypes were now made for mass production. In order to manufacture the individual models, a production line was established. This is where objects such as the table lamp by Karl Jacob Jucker and Wilhelm Wagenfeld, the tea infuser by Wolfgang Tümpel and the ashtrays by Marianne Brandt were produced. In Dessau, the metal workshop focused primarily on the design and production of lamps to furnish the newly constructed Bauhaus building. In 1928, the metal workshop was again restructured by the new Bauhaus director, Hannes Meyer, and it was temporarily supervised by Marianne Brandt.
*Staatliches Bauhaus, Weimar, 1919 -1923. Weimar-München, Bauhaus-Verlag, p. 116. Published by the Bauhaus in collaboration with Karl Nierendorf, Cologne. Typography by L. Moholy-Nagy.
References
> Bayer, H., Gropius, W., & Gropius, I. (Eds.). (1938). Bauhaus, 1919-1928. New York: The Museum of Modern Art.
01 G_Metal workshop, 1928. Table lamp in aluminium and nickel-plated brass.02 Metal Workshop at the Bauhaus in Weimar, 1923.03 Fruit bowl, Josef Albers, 1924. Bowl made from industrial products such as chrome, glass and brass.
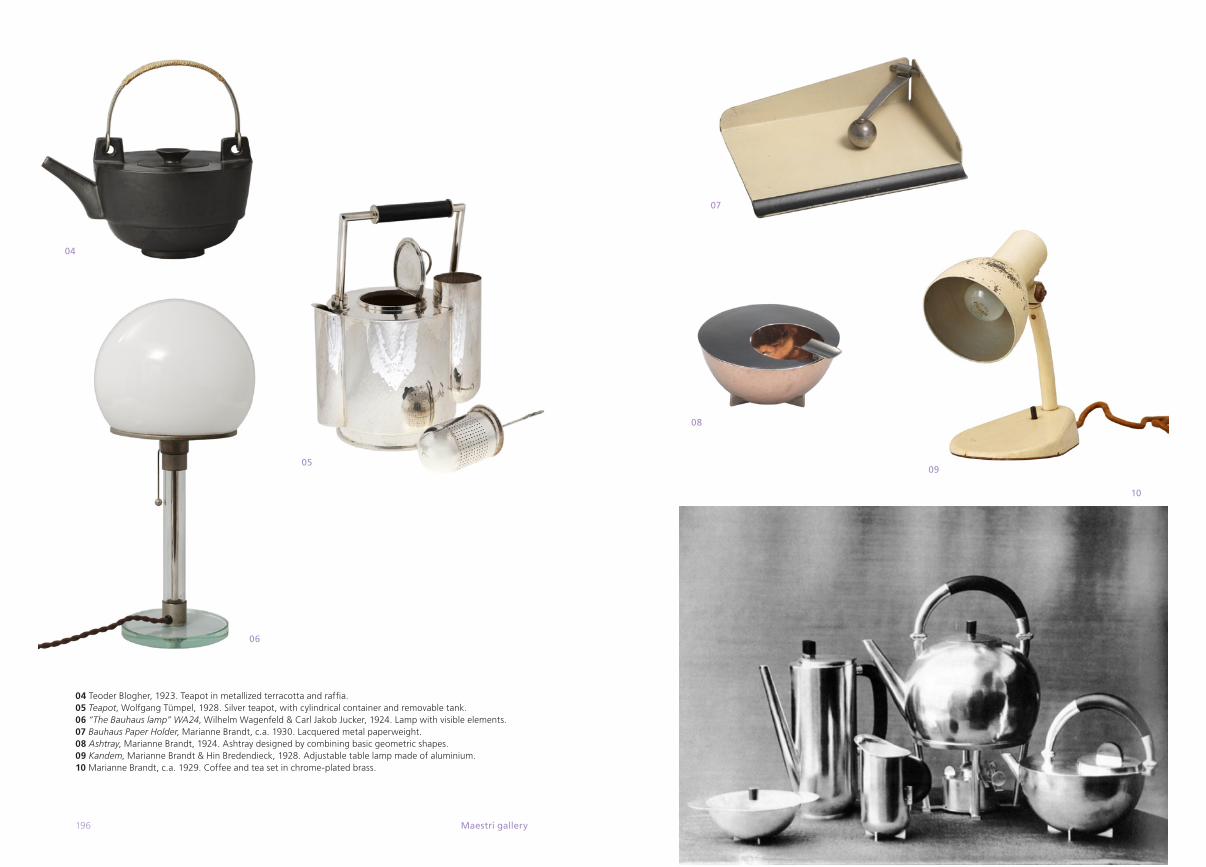
197196
05
04
07
09
06
08
10
Maestri gallery
04 Teoder Blogher, 1923. Teapot in metallized terracotta and raffia. 05 Teapot, Wolfgang Tümpel, 1928. Silver teapot, with cylindrical container and removable tank.06 “The Bauhaus lamp” WA24, Wilhelm Wagenfeld & Carl Jakob Jucker, 1924. Lamp with visible elements.07 Bauhaus Paper Holder, Marianne Brandt, c.a. 1930. Lacquered metal paperweight.08 Ashtray, Marianne Brandt, 1924. Ashtray designed by combining basic geometric shapes.09 Kandem, Marianne Brandt & Hin Bredendieck, 1928. Adjustable table lamp made of aluminium.10 Marianne Brandt, c.a. 1929. Coffee and tea set in chrome-plated brass.
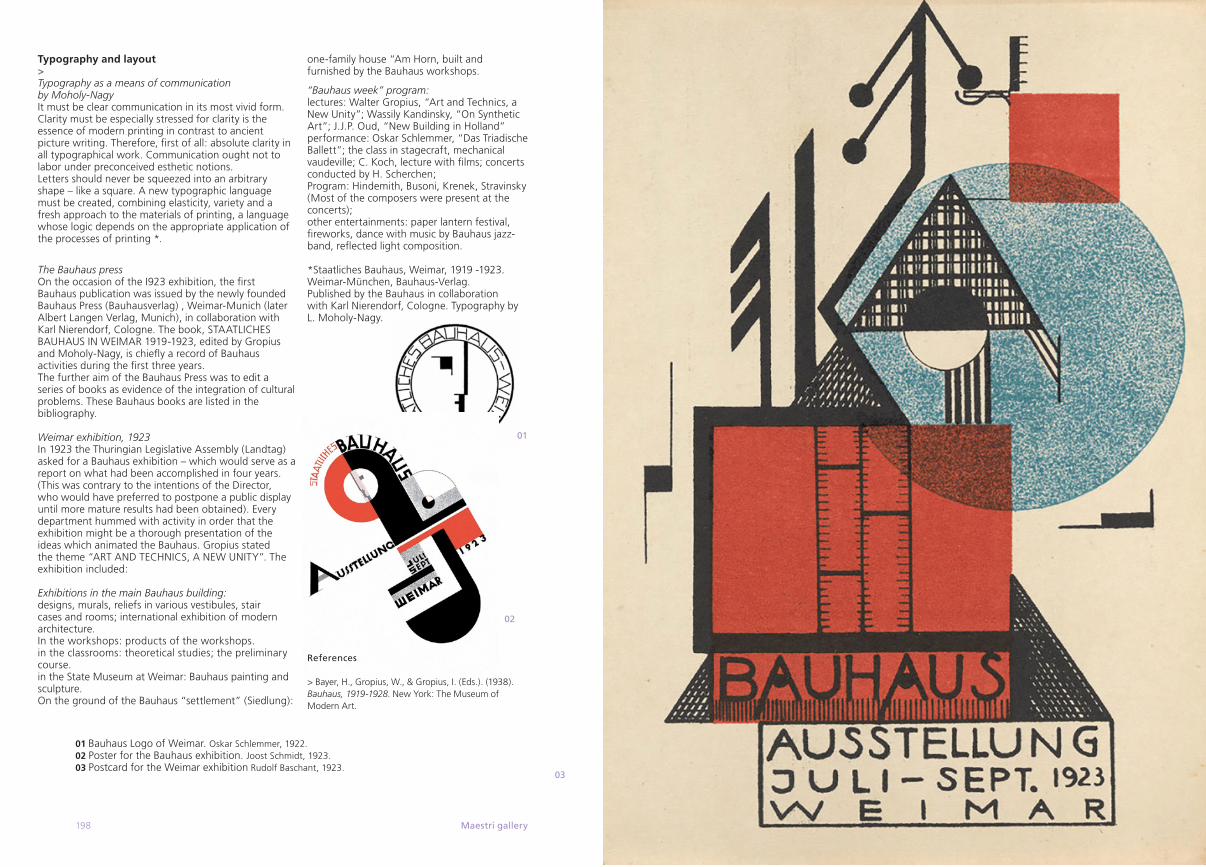
199198 Maestri gallery
03
01
02
Typography and layout> Typography as a means of communication by Moholy-NagyIt must be clear communication in its most vivid form.Clarity must be especially stressed for clarity is the essence of modern printing in contrast to ancient picture writing. Therefore, first of all: absolute clarity in all typographical work. Communication ought not to labor under preconceived esthetic notions.Letters should never be squeezed into an arbitrary shape – like a square. A new typographic language must be created, combining elasticity, variety and a fresh approach to the materials of printing, a language whose logic depends on the appropriate application of the processes of printing *.
The Bauhaus pressOn the occasion of the I923 exhibition, the first Bauhaus publication was issued by the newly founded Bauhaus Press (Bauhausverlag) , Weimar-Munich (later Albert Langen Verlag, Munich), in collaboration with Karl Nierendorf, Cologne. The book, STAATLICHES BAUHAUS IN WEIMAR 1919-1923, edited by Gropius and Moholy-Nagy, is chiefly a record of Bauhaus activities during the first three years.The further aim of the Bauhaus Press was to edit a series of books as evidence of the integration of culturalproblems. These Bauhaus books are listed in the bibliography.
Weimar exhibition, 1923In 1923 the Thuringian Legislative Assembly (Landtag) asked for a Bauhaus exhibition – which would serve as a report on what had been accomplished in four years.(This was contrary to the intentions of the Director, who would have preferred to postpone a public display until more mature results had been obtained). Every department hummed with activity in order that the exhibition might be a thorough presentation of the ideas which animated the Bauhaus. Gropius stated the theme “ART AND TECHNICS, A NEW UNITY”. The exhibition included:
Exhibitions in the main Bauhaus building: designs, murals, reliefs in various vestibules, stair cases and rooms; international exhibition of modern architecture.In the workshops: products of the workshops. in the classrooms: theoretical studies; the preliminary course. in the State Museum at Weimar: Bauhaus painting and sculpture. On the ground of the Bauhaus “settlement” (Siedlung):
one-family house “Am Horn, built and furnished by the Bauhaus workshops.
“Bauhaus week” program: lectures: Walter Gropius, “Art and Technics, a New Unity”; Wassily Kandinsky, “On Synthetic Art”; J.J.P. Oud, “New Building in Holland” performance: Oskar Schlemmer, “Das Triadische Ballett”; the class in stagecraft, mechanical vaudeville; C. Koch, lecture with films; concerts conducted by H. Scherchen; Program: Hindemith, Busoni, Krenek, Stravinsky (Most of the composers were present at the concerts); other entertainments: paper lantern festival, fireworks, dance with music by Bauhaus jazz-band, reflected light composition.
*Staatliches Bauhaus, Weimar, 1919 -1923. Weimar-München, Bauhaus-Verlag. Published by the Bauhaus in collaboration with Karl Nierendorf, Cologne. Typography by L. Moholy-Nagy.
References
> Bayer, H., Gropius, W., & Gropius, I. (Eds.). (1938). Bauhaus, 1919-1928. New York: The Museum of Modern Art.
01 Bauhaus Logo of Weimar. Oskar Schlemmer, 1922. 02 Poster for the Bauhaus exhibition. Joost Schmidt, 1923. 03 Postcard for the Weimar exhibition Rudolf Baschant, 1923.
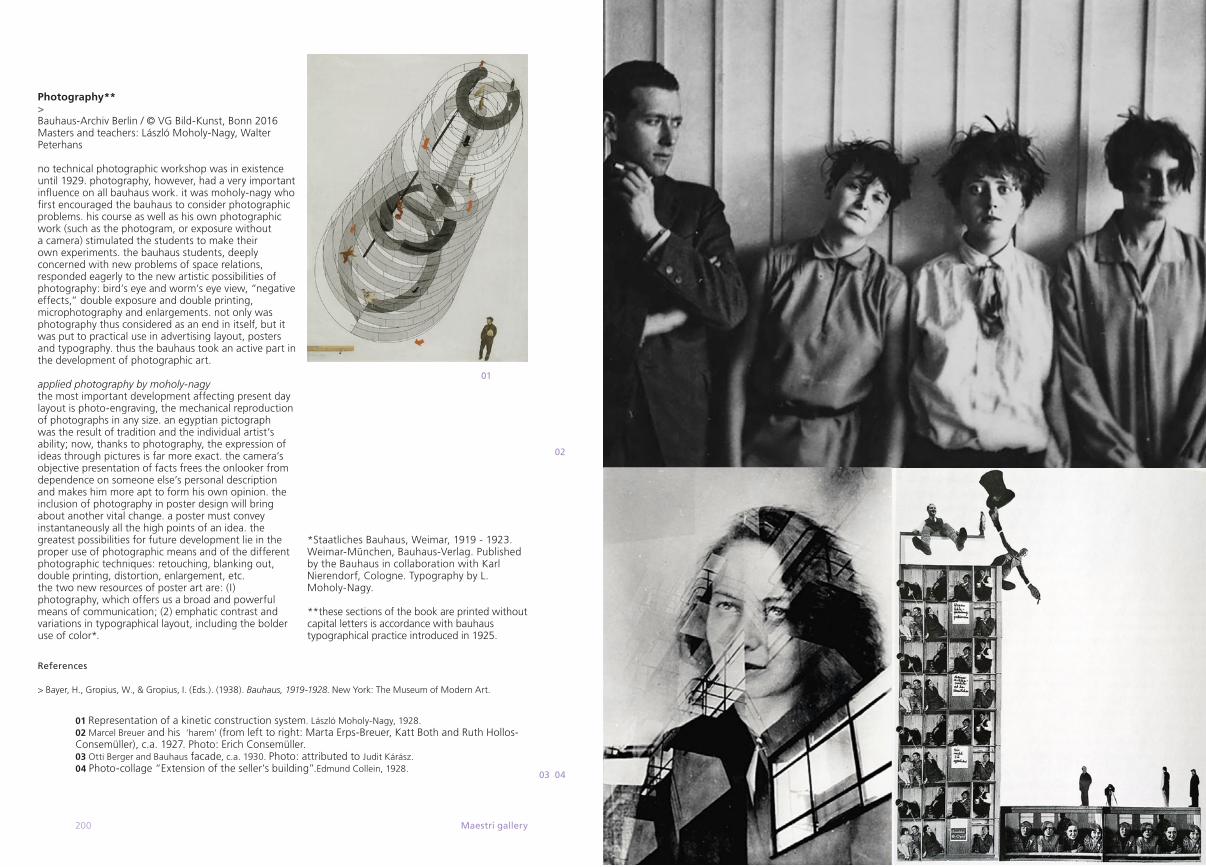
201200
03 04
02
01
Maestri gallery
Photography** > Bauhaus-Archiv Berlin / © VG Bild-Kunst, Bonn 2016Masters and teachers: László Moholy-Nagy, Walter Peterhans
no technical photographic workshop was in existence until 1929. photography, however, had a very important influence on all bauhaus work. it was moholy-nagy who first encouraged the bauhaus to consider photographic problems. his course as well as his own photographic work (such as the photogram, or exposure without a camera) stimulated the students to make their own experiments. the bauhaus students, deeply concerned with new problems of space relations, responded eagerly to the new artistic possibilities of photography: bird’s eye and worm’s eye view, “negative effects,” double exposure and double printing, microphotography and enlargements. not only was photography thus considered as an end in itself, but it was put to practical use in advertising layout, posters and typography. thus the bauhaus took an active part in the development of photographic art.
applied photography by moholy-nagythe most important development affecting present day layout is photo-engraving, the mechanical reproduction of photographs in any size. an egyptian pictograph was the result of tradition and the individual artist’s ability; now, thanks to photography, the expression of ideas through pictures is far more exact. the camera’s objective presentation of facts frees the onlooker from dependence on someone else’s personal description and makes him more apt to form his own opinion. the inclusion of photography in poster design will bring about another vital change. a poster must convey instantaneously all the high points of an idea. the greatest possibilities for future development lie in the proper use of photographic means and of the different photographic techniques: retouching, blanking out, double printing, distortion, enlargement, etc.the two new resources of poster art are: (I) photography, which offers us a broad and powerful means of communication; (2) emphatic contrast and variations in typographical layout, including the bolder use of color*.
*Staatliches Bauhaus, Weimar, 1919 - 1923. Weimar-München, Bauhaus-Verlag. Published by the Bauhaus in collaboration with Karl Nierendorf, Cologne. Typography by L. Moholy-Nagy.
**these sections of the book are printed without capital letters is accordance with bauhaus typographical practice introduced in 1925.
References
> Bayer, H., Gropius, W., & Gropius, I. (Eds.). (1938). Bauhaus, 1919-1928. New York: The Museum of Modern Art.
01 Representation of a kinetic construction system. László Moholy-Nagy, 1928. 02 Marcel Breuer and his ‘harem’ (from left to right: Marta Erps-Breuer, Katt Both and Ruth Hollos-Consemüller), c.a. 1927. Photo: Erich Consemüller.03 Otti Berger and Bauhaus facade, c.a. 1930. Photo: attributed to Judit Kárász. 04 Photo-collage “Extension of the seller’s building”.Edmund Collein, 1928.
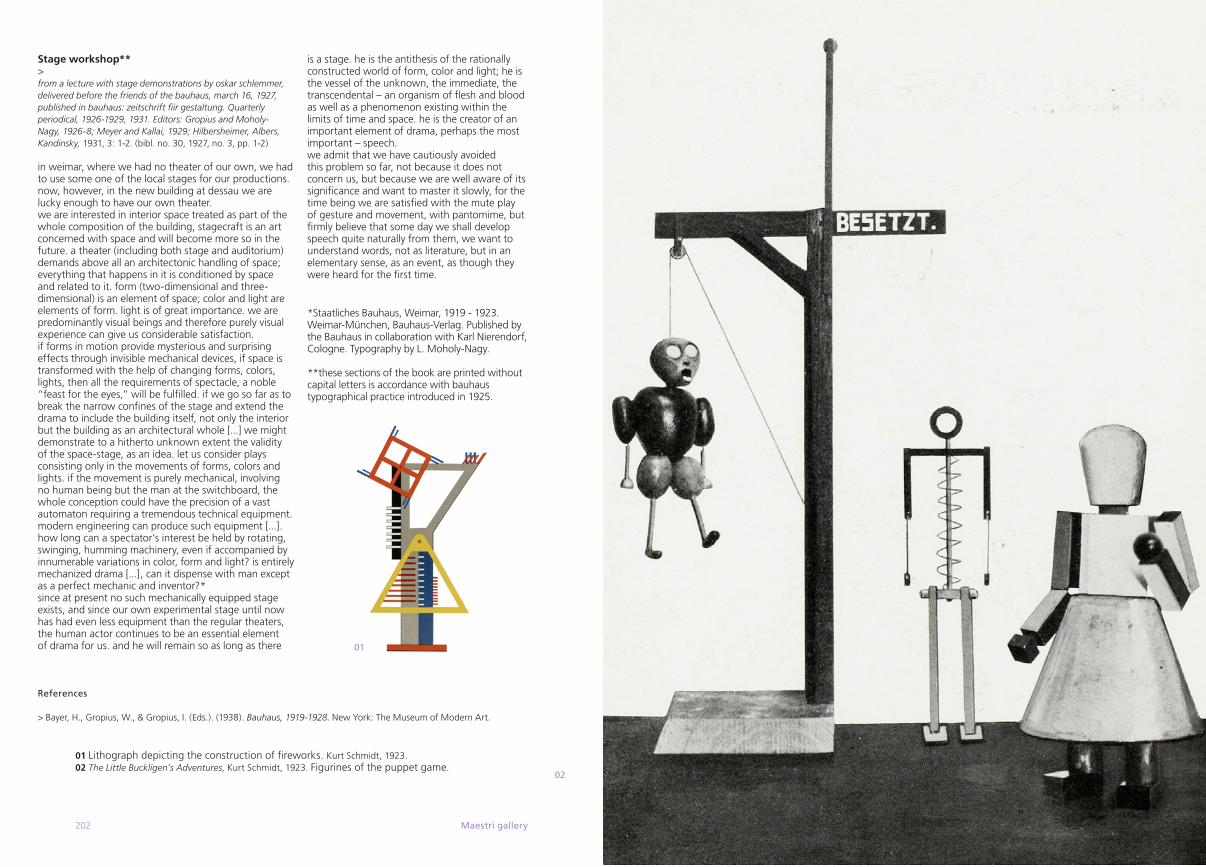
203202
02
01
Maestri gallery
Stage workshop**> from a lecture with stage demonstrations by oskar schlemmer, delivered before the friends of the bauhaus, march 16, 1927, published in bauhaus: zeitschrift fiir gestaltung. Quarterly periodical, 1926-1929, 1931. Editors: Gropius and Moholy-Nagy, 1926-8; Meyer and Kallai, 1929; Hilbersheimer, Albers, Kandinsky, 1931, 3: 1-2. (bibl. no. 30, 1927, no. 3, pp. 1-2)
in weimar, where we had no theater of our own, we had to use some one of the local stages for our productions. now, however, in the new building at dessau we are lucky enough to have our own theater.we are interested in interior space treated as part of the whole composition of the building, stagecraft is an art concerned with space and will become more so in the future. a theater (including both stage and auditorium) demands above all an architectonic handling of space; everything that happens in it is conditioned by space and related to it. form (two-dimensional and three-dimensional) is an element of space; color and light are elements of form. light is of great importance. we are predominantly visual beings and therefore purely visual experience can give us considerable satisfaction. if forms in motion provide mysterious and surprising effects through invisible mechanical devices, if space is transformed with the help of changing forms, colors, lights, then all the requirements of spectacle, a noble “feast for the eyes,” will be fulfilled. if we go so far as to break the narrow confines of the stage and extend the drama to include the building itself, not only the interior but the building as an architectural whole [...] we might demonstrate to a hitherto unknown extent the validity of the space-stage, as an idea. let us consider plays consisting only in the movements of forms, colors and lights. if the movement is purely mechanical, involving no human being but the man at the switchboard, the whole conception could have the precision of a vast automaton requiring a tremendous technical equipment. modern engineering can produce such equipment [...]. how long can a spectator’s interest be held by rotating, swinging, humming machinery, even if accompanied by innumerable variations in color, form and light? is entirely mechanized drama [...], can it dispense with man except as a perfect mechanic and inventor?*since at present no such mechanically equipped stage exists, and since our own experimental stage until now has had even less equipment than the regular theaters, the human actor continues to be an essential element of drama for us. and he will remain so as long as there
is a stage. he is the antithesis of the rationally constructed world of form, color and light; he is the vessel of the unknown, the immediate, the transcendental – an organism of flesh and blood as well as a phenomenon existing within the limits of time and space. he is the creator of an important element of drama, perhaps the most important – speech. we admit that we have cautiously avoided this problem so far, not because it does not concern us, but because we are well aware of its significance and want to master it slowly, for the time being we are satisfied with the mute play of gesture and movement, with pantomime, but firmly believe that some day we shall develop speech quite naturally from them, we want to understand words, not as literature, but in an elementary sense, as an event, as though they were heard for the first time.
*Staatliches Bauhaus, Weimar, 1919 - 1923. Weimar-München, Bauhaus-Verlag. Published by the Bauhaus in collaboration with Karl Nierendorf, Cologne. Typography by L. Moholy-Nagy.
**these sections of the book are printed without capital letters is accordance with bauhaus typographical practice introduced in 1925.
References
> Bayer, H., Gropius, W., & Gropius, I. (Eds.). (1938). Bauhaus, 1919-1928. New York: The Museum of Modern Art.
01 Lithograph depicting the construction of fireworks. Kurt Schmidt, 1923. 02 The Little Buckligen’s Adventures, Kurt Schmidt, 1923. Figurines of the puppet game.
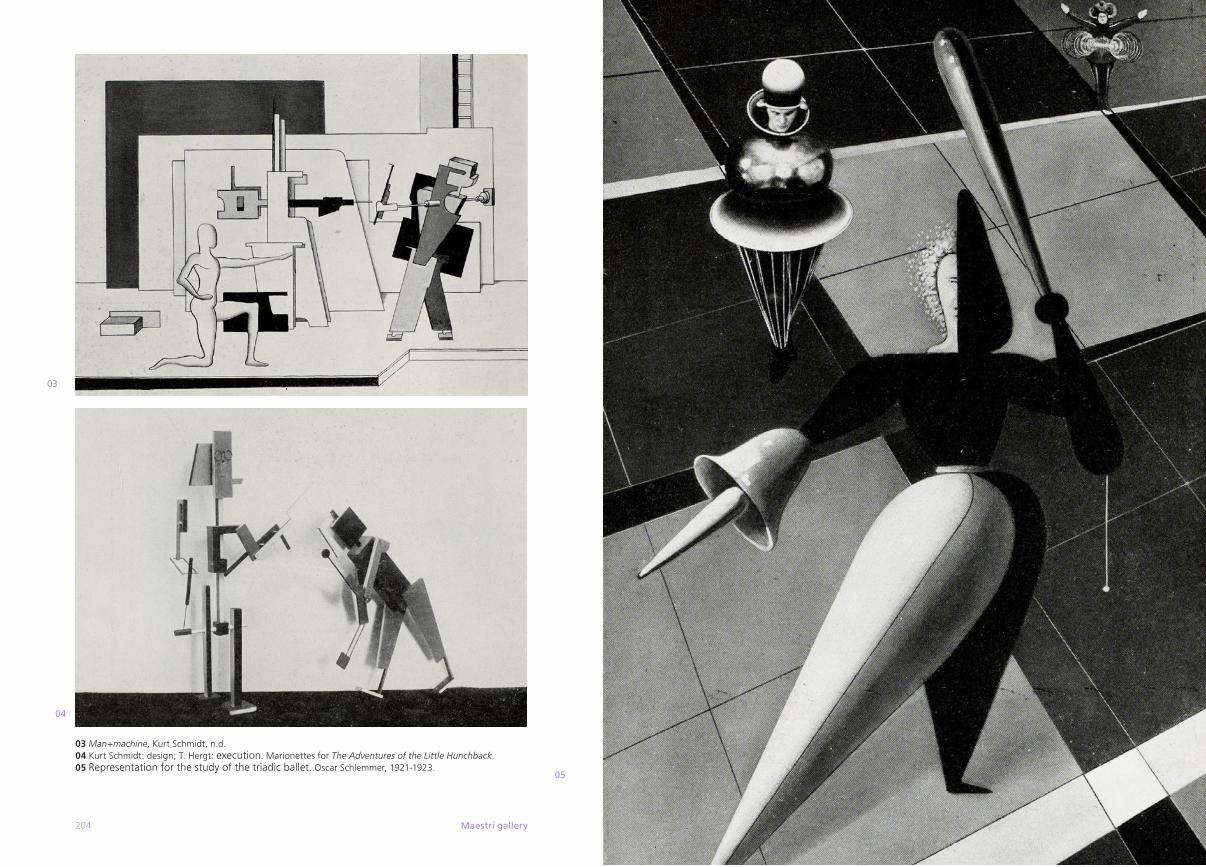
205204
05
03
04
Maestri gallery
03 Man+machine, Kurt Schmidt, n.d.04 Kurt Schmidt: design; T. Hergt: execution. Marionettes for The Adventures of the Little Hunchback.05 Representation for the study of the triadic ballet. Oscar Schlemmer, 1921-1923.
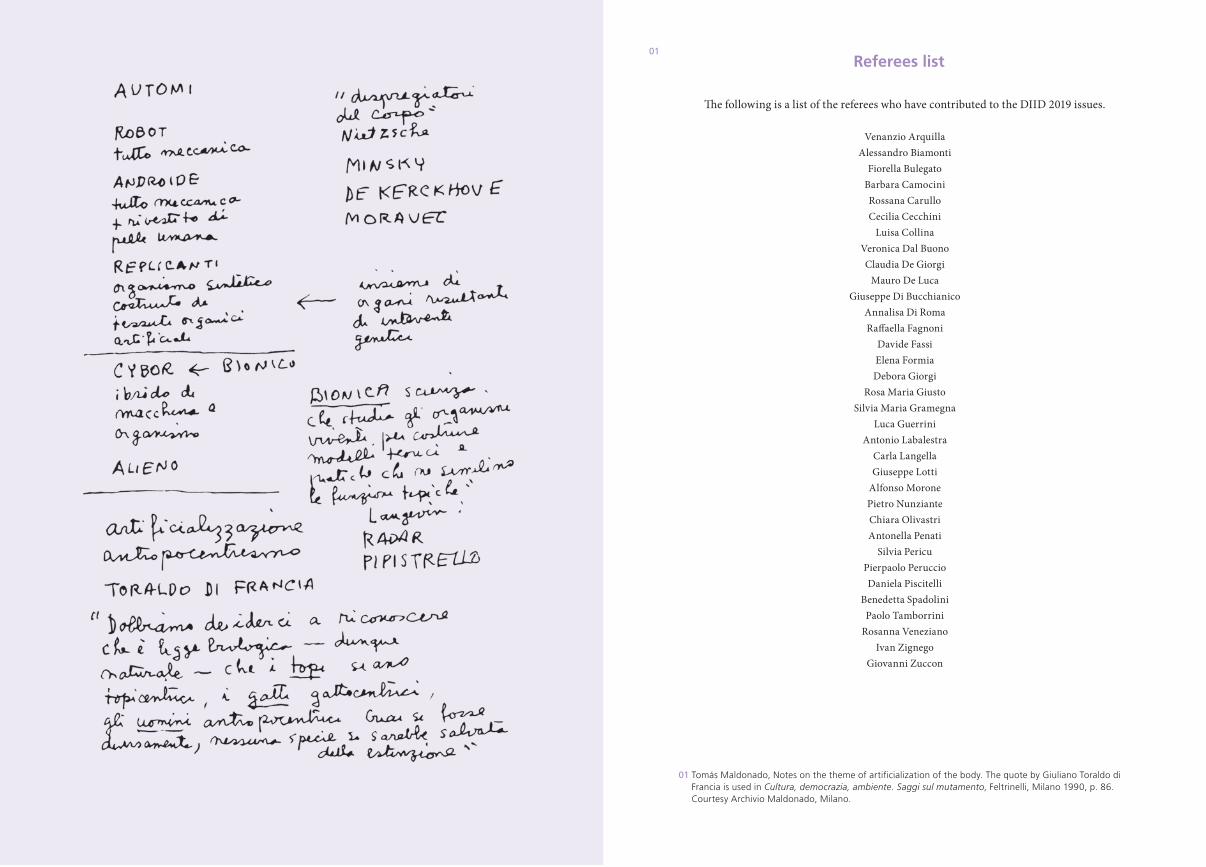
Referees list
01
01
The following is a list of the referees who have contributed to the DIID 2019 issues.
Venanzio Arquilla Alessandro Biamonti
Fiorella Bulegato Barbara Camocini Rossana Carullo Cecilia Cecchini
Luisa Collina Veronica Dal Buono Claudia De Giorgi
Mauro De Luca Giuseppe Di Bucchianico
Annalisa Di Roma Raffaella Fagnoni
Davide FassiElena Formia Debora Giorgi
Rosa Maria GiustoSilvia Maria Gramegna
Luca Guerrini Antonio Labalestra
Carla Langella Giuseppe Lotti
Alfonso Morone Pietro Nunziante Chiara Olivastri Antonella Penati
Silvia Pericu Pierpaolo Peruccio Daniela Piscitelli
Benedetta Spadolini Paolo Tamborrini
Rosanna Veneziano Ivan Zignego
Giovanni Zuccon
Tomás Maldonado, Notes on the theme of artificialization of the body. The quote by Giuliano Toraldo di Francia is used in Cultura, democrazia, ambiente. Saggi sul mutamento, Feltrinelli, Milano 1990, p. 86. Courtesy Archivio Maldonado, Milano.

Published by LISt [email protected]
Art Director & ProductionBlacklist Creative, BCNblacklist-creative.com
Printed and bound in the European Union 2019
All rights reserved© of the edition LISt Lab© of the text the authors© of the images the authors
Prohibited total or partial reproduction of this book by any means, without permission of the author and publisher.
Sales, Marketing & [email protected]/en/distribuzione/
LIStLab is an editorial workshop, based in Europe, that works on contemporary issues. LISt Lab not only publishes, but also researches, proposes, promotes, produces, creates networks.
LIStLab is a green company committed to respect the environment. Paper, ink, glues and all processings come from short supply chains and aim at limiting pollution. The print run of books and magazines is based on consumption patterns, thus preventing waste of paper and surpluses. LISt Lab aims at the responsibility of the authors and markets, towards the knowledge of a new publishing culture based on resource management.




















