Design and Fabrication of a Motor Legged Capsule for the Active Exploration of the Gastrointestinal...
11
IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 13, NO. 2, APRIL2008 169 Design and Fabrication of a Motor Legged Capsule for the Active Exploration of the Gastrointestinal Tract Marco Quirini, Student Member, IEEE, Arianna Menciassi, Member, IEEE, Sergio Scapellato, Student Member, IEEE, Cesare Stefanini, Member, IEEE, and Paolo Dario, Fellow, IEEE Abstract—This paper describes a novel solution for the active locomotion of a miniaturized endoscopic capsule in the gastroin- testinal (GI) tract. In particular, the authors present the design, development, and testing of a legged locomotion system embedded in a capsule (with a volume of about 4–5 cm 3 ) and actuated by a brushless minimotor. The actuation mechanism and transmis- sion mechanism are described in detail in order to highlight the compactness of the overall design. This device is provided with four superelastic legs, allowing large stroke advancement in the GI tract, and a CMOS frontal camera, for diagnostic purposes. A dedicated electronic board for controlling the opening angle of the legs and adjusting their speed has been developed. In order to investigate the motion ability of the device, a set of experiments has been carried out. Four different types of superelastic legs have been designed and tested with the objective to identify the best leg configuration for capsule locomotion. Experimental results demon- strate that the device can travel in the digestive tract with a typical speed ranging between 10 and 40 mm/min. Index Terms—Brushless minimotor, capsular endoscopy, legged locomotion, microlegs, superelastic. I. INTRODUCTION I N THE LAST few years, there was a growing interest in developing minimally invasive and endoluminal devices for surgical and/or diagnostic applications [1]–[5]. One of the main goals of these research activities is the development of small robots able to explore human body cavities, e.g., the gastroin- testinal (GI) tract, in a controlled manner and without pain and discomfort for patients. The use of miniaturized and swallow- able robots able to actively move inside the human body and to perform diagnosis, drug delivery, and even surgical opera- tions allows for the reduction of hospitalization time and related health-care costs, in addition to the clear advantages from the early diagnosis viewpoint. Swallowable capsules, able to acquire images by a CMOS camera and then to transmit them wirelessly, were presented Manuscript received January 12, 2007, revised September 9, 2007. Recom- mended by Technical Editor J. P. Desai. This work was supported in part by the Intelligent Microsystem Center, Korea Institute of Science and Technology (KIST) Korea, and in part by the European Commission in the framework of VECTOR FP6 European Project EU/IST-2006-033970. The authors are with the Center for Research in Microengineering (CRIM) Laboratory, Scuola Superiore Sant’Anna (SSSA), 56025 Pisa, Italy (e-mail: [email protected]; [email protected]; [email protected]; cesare@sssup. it; [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TMECH.2008.918491 recently [6]–[8]. The main limitation of these devices is the lack of active locomotion, since they move by simply exploit- ing GI peristalsis. Consequently, they cannot stop, turn, or go back during their journey inside the GI tract. This problem is in part approached by capsules like RF Norika [9], which is power supplied by an external wireless system, and which is able to rotate if stimulated by an external magnetic field. Both power and magnetic sources are embedded in a jacket, worn by patients during the examination. Another interesting device for GI tract exploration has been developed by Olympus [10]. It consists of a pill able to rotate and also to move back and forward, if stimulated by an external magnetic field. Another endoscopic capsule device is described in [11], whose driving system is based on external magnetic fields applied to a perma- nent magnet embedded in the capsule. A different approach is used in [12], where capsule motion is generated through elec- trical stimulation. Anyhow, all examples mentioned earlier are endoscopic capsules able to move and/or orientate through ex- ternal forces (i.e., human peristalsis, or external magnetic and electrical fields). Thus, it is extremely interesting the study and development of new mechatronic solutions for capsule locomotion, where forces are generated by the capsule itself: in this way, a controlled and teleoperated locomotion can be achieved with important advantages in terms of correct diagnosis and therapy. In fact, the controllability of capsule motion is an essential requirement to detect, observe, and analyze pathological areas and to perform targeted medical procedures, such as biopsy and drug delivery. Self-locomoting microrobots able to move inside tubular structures are commonly used in industrial or civil fields, e.g., for pipe inspection, as described in [13]–[17]. On the other hand, developing robotic capsules able to move inside the GI tract is much more challenging, due to the peculiar features of the intestinal environment: unstructured, slippery, and highly deformable [18]–[22]. For this reason, traditional locomotion systems, e.g., based on wheels and crawling tracks, cannot be successfully used. An example of a locomotion system to be integrated into moving robots for biomedical applications is described in [23] and is based on a rotating rib. Different types of actuators were analyzed in order to find the best solution for propelling inside human body cavities: in [24], a fin-type electromagnetic actuator is proposed; in [25], a multijoint endocavitary robot is actuated by using piezoelectric elements; in [26], a robotic capsule with four actuators, based on two shape memory alloy (SMA) springs 1083-4435/$25.00 © 2008 IEEE
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Design and Fabrication of a Motor Legged Capsule for the Active Exploration of the Gastrointestinal...

IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 13, NO. 2, APRIL 2008 169
Design and Fabrication of a Motor LeggedCapsule for the Active Exploration of the
Gastrointestinal TractMarco Quirini, Student Member, IEEE, Arianna Menciassi, Member, IEEE,
Sergio Scapellato, Student Member, IEEE, Cesare Stefanini, Member, IEEE, and Paolo Dario, Fellow, IEEE
Abstract—This paper describes a novel solution for the activelocomotion of a miniaturized endoscopic capsule in the gastroin-testinal (GI) tract. In particular, the authors present the design,development, and testing of a legged locomotion system embeddedin a capsule (with a volume of about 4–5 cm3 ) and actuated bya brushless minimotor. The actuation mechanism and transmis-sion mechanism are described in detail in order to highlight thecompactness of the overall design. This device is provided withfour superelastic legs, allowing large stroke advancement in theGI tract, and a CMOS frontal camera, for diagnostic purposes.A dedicated electronic board for controlling the opening angle ofthe legs and adjusting their speed has been developed. In order toinvestigate the motion ability of the device, a set of experimentshas been carried out. Four different types of superelastic legs havebeen designed and tested with the objective to identify the best legconfiguration for capsule locomotion. Experimental results demon-strate that the device can travel in the digestive tract with a typicalspeed ranging between 10 and 40 mm/min.
Index Terms—Brushless minimotor, capsular endoscopy, leggedlocomotion, microlegs, superelastic.
I. INTRODUCTION
IN THE LAST few years, there was a growing interest indeveloping minimally invasive and endoluminal devices for
surgical and/or diagnostic applications [1]–[5]. One of the maingoals of these research activities is the development of smallrobots able to explore human body cavities, e.g., the gastroin-testinal (GI) tract, in a controlled manner and without pain anddiscomfort for patients. The use of miniaturized and swallow-able robots able to actively move inside the human body andto perform diagnosis, drug delivery, and even surgical opera-tions allows for the reduction of hospitalization time and relatedhealth-care costs, in addition to the clear advantages from theearly diagnosis viewpoint.
Swallowable capsules, able to acquire images by a CMOScamera and then to transmit them wirelessly, were presented
Manuscript received January 12, 2007, revised September 9, 2007. Recom-mended by Technical Editor J. P. Desai. This work was supported in part bythe Intelligent Microsystem Center, Korea Institute of Science and Technology(KIST) Korea, and in part by the European Commission in the framework ofVECTOR FP6 European Project EU/IST-2006-033970.
The authors are with the Center for Research in Microengineering (CRIM)Laboratory, Scuola Superiore Sant’Anna (SSSA), 56025 Pisa, Italy (e-mail:[email protected]; [email protected]; [email protected]; [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TMECH.2008.918491
recently [6]–[8]. The main limitation of these devices is thelack of active locomotion, since they move by simply exploit-ing GI peristalsis. Consequently, they cannot stop, turn, or goback during their journey inside the GI tract. This problem isin part approached by capsules like RF Norika [9], which ispower supplied by an external wireless system, and which isable to rotate if stimulated by an external magnetic field. Bothpower and magnetic sources are embedded in a jacket, wornby patients during the examination. Another interesting devicefor GI tract exploration has been developed by Olympus [10].It consists of a pill able to rotate and also to move back andforward, if stimulated by an external magnetic field. Anotherendoscopic capsule device is described in [11], whose drivingsystem is based on external magnetic fields applied to a perma-nent magnet embedded in the capsule. A different approach isused in [12], where capsule motion is generated through elec-trical stimulation. Anyhow, all examples mentioned earlier areendoscopic capsules able to move and/or orientate through ex-ternal forces (i.e., human peristalsis, or external magnetic andelectrical fields).
Thus, it is extremely interesting the study and development ofnew mechatronic solutions for capsule locomotion, where forcesare generated by the capsule itself: in this way, a controlledand teleoperated locomotion can be achieved with importantadvantages in terms of correct diagnosis and therapy. In fact,the controllability of capsule motion is an essential requirementto detect, observe, and analyze pathological areas and to performtargeted medical procedures, such as biopsy and drug delivery.
Self-locomoting microrobots able to move inside tubularstructures are commonly used in industrial or civil fields, e.g.,for pipe inspection, as described in [13]–[17]. On the otherhand, developing robotic capsules able to move inside the GItract is much more challenging, due to the peculiar features ofthe intestinal environment: unstructured, slippery, and highlydeformable [18]–[22]. For this reason, traditional locomotionsystems, e.g., based on wheels and crawling tracks, cannot besuccessfully used.
An example of a locomotion system to be integrated intomoving robots for biomedical applications is described in [23]and is based on a rotating rib. Different types of actuators wereanalyzed in order to find the best solution for propelling insidehuman body cavities: in [24], a fin-type electromagnetic actuatoris proposed; in [25], a multijoint endocavitary robot is actuatedby using piezoelectric elements; in [26], a robotic capsule withfour actuators, based on two shape memory alloy (SMA) springs
1083-4435/$25.00 © 2008 IEEE

170 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 13, NO. 2, APRIL 2008
able to linearly move four clampers along the capsule body,is reported. Finally, the endoscopic capsule described in [27]and [28] exploits again SMA actuators, but for moving tinylegs integrated in the capsule, thus taking inspiration from thecockroach’s gait.
This paper describes a novel model of endoscopic capsulewith an on-board active locomotion mechanisms exploiting asmall brushless dc motor to move miniaturised legs embeddedin the capsule. All theoretical and experimental issues related tothe legged locomotion selection for the GI tract are discussed inSection II. Section III illustrates the extremely compact capsuledesign, and it provides details about mechanical componentsconverting motor rotation to legs motion. Capsule microfabri-cation is reported in Section IV. Section V deals with motorcharacterization and it illustrates the control system for the cap-sule legs. Section VI describes experiments done in order totest the capsule reliability and performance, and it reports theobtained results. Finally, conclusions and future improvementsof the system are illustrated in Section VII.
II. LOCOMOTION ANALYSIS
A. Legged Locomotion
The first problem to approach for developing a capsule pro-vided with an active and on-board locomotion system is theselection of a suitable locomotion strategy, allowing the robotto propel in the gut. On the other hand, the locomotion strategyis strictly connected to the features of the GI tract in which thedevice must operate.
A preliminary analysis of locomotion issues in the gut hasbeen performed by Dario et al. in [20]: it has been outlined howeffective locomotion in a slippery and deformable substrate—such as the human gut—must take into account the biome-chanics of the tissue, which is an extremely compliant, nonlin-ear, viscoelastic material, typically covered by a thick (up to2 mm) layer of lubricant mucus, with a friction coefficient aslow as 10−3 . Taking into account the guidelines provided bythis preliminary study, a legged locomotion system has beenselected [22] as possible solution to the problem of locomotionin the gut. In fact, legged locomotion offers several advantagesin terms of:
1) good control of the trajectory, thus allowing the capsuleto pass over critical areas without touching them;
2) better adaptability to the environment: due to legs, the cap-sule is adequate to propel in anatomically and biomechan-ically different areas (stomach, small and large intestine)featured by different average diameter;
3) simplified adhesion: by localizing the contact points insmall areas (tip of each leg), larger contact pressures can beachieved, thus producing a significant local deformation.In this way, high friction coefficient can be reached in thecontact points, thus improving the leg lever effect.
According to the authors analysis, a legged locomotion sys-tem for propelling an endoscopic capsule in the gut shouldpossess the following features.
1) Two sets of legs, one in the front and one in the rear partof the capsule. The rear set of legs must produce a thrust
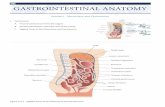
Fig. 1. Different positions of the legs in the simulation.
force for propulsion; the frontal set has the function bothto fix the capsule in its position (when the rear legs areretracted) and to steer the capsule when approaching anintestine curve.
2) At least one active degree of freedom (DoF), for movingthe leg in the longitudinal direction along the capsule body,and one passive DoF at the leg knee, adjusting the leg tothe compliance of the tissue. The ability of the capsuleto propel in the gut is strictly connected to the number ofactive DoF of its legs: a larger number of DoF improve thelocomotion performance, but reduces the feasibility of aworking prototype, due to the complexity of the actuationsystem and to its low efficiency in miniaturized size.
3) A propulsion force large enough to distend the tissue nor-mally collapsed over the capsule body. The typical forcenecessary for locomotion has been estimated due to sim-ulations based on the theoretical model described in [29].
The simulation of the capsule locomotion has been performedby considering:
1) a capsule with four legs (in the rear part of the capsule)and with a frontal balloon (used for helping the intestinedilatation) of about 3 cm in diameter;
2) a tubular, compliant, and slippery tissue as walking envi-ronment with an average diameter of 4 cm;
3) a rower locomotion gait: the rear legs make an arc-shapedcourse performing a spanning angle of about 120◦ (seeFig. 1).
In this condition, the simulation has revealed that:1) a 0.25-N force per leg is necessary for distending the tissue
and propelling the capsule forward;2) in the simulated locomotion, an accordion effect has been
observed due to the lack of a stopping mechanism in thefrontal part of the capsule body, which could fix the cap-sule in a specific point when the rear legs are in the closingphase.
B. Technological Problems and Previous Actuation Solution
As reported in the literature, the development of a leggedendoscopic microcapsule for screening the entire GI tract is

QUIRINI et al.: DESIGN AND FABRICATION OF A MOTOR LEGGED CAPSULE 171
strictly connected to the availability of miniature and reliableactuation systems.
The main features for an actuation system to be integrated ina legged endoscopic capsule are the following:
1) compactness, for not increasing the size of the devicewhose overall volume must be approximately 4–5 cm3 ;
2) flexibility in terms of degrees of freedom (each leg shouldbe provided with one independent actuator);
3) low power, the power stored on-board the capsule beinglimited and the wireless power transmission being lowefficiency;
4) intrinsically safe and biocompatible.By considering these basic requests, the authors have se-
lected an SMA wires, analyzed and modeled as in [30], asthe first actuation system. Experimental tests revealed that theSMA actuation system is able to propel the capsule only in anoncollapsed gut (i.e., insufflation from outside was necessaryin order to reduce the resistance of the tissue to the capsule ad-vancement), because of the low force provided by SMA-basedactuators [31]. Moreover, some problems related to heat trans-fer during functioning have been observed: heat transfer wastoo low, and consequently, it was not possible to achieve highfrequencies of the gait cycle (no more than ∼2.7 cycles/min).
Another problem related to the SMA-based version of thecapsule was the power consumption: a large amount of energy(6.64 J for cycle) is required to obtain a feasible spanning angle(100◦) with an exploitable propulsion force at the leg’s tip of only0.08/0.09 N. Finally, the SMA-based solution was not reliable,making difficult to perform a large number of experimental testswith the same prototype without breaking problems.
For these reasons, a different actuation system based on atraditional electromagnetic motor has been selected and it willbe illustrated in the following sections.
III. ENDOSCOPIC CAPSULE DESIGN
A. Overall System Description
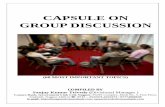
The capsule prototype and its main components are shown inFig. 2. The capsule consists of a main body, 40 mm in lengthand a 12 mm in diameter, integrating the vision system and theactuation mechanism.
The legs actuator is a dc brushless motor developed by NamikiPrecision Jewel Company, Ltd. (Tokyo, Japan): it has an externaldiameter of 4 mm and a total length of 17.4 mm, with a maximumoutput torque of 10.6 mN·m.
Smaller actuators are available on the market, but in general,their output torque is not sufficient for our task. Consequently,the authors selected the actuator with the best tradeoff betweenoverall volume, reliability, and output torque. The actuator fea-tures are reported in Table I.
The vision camera system is on the top of the capsule; itconsists of a CMOS pinhole camera with a diameter of 9 mmand a length of 10 mm, four ultrawhite LEDs placed around thepinhole and a resolution of 510 × 492 pixels.
The designed prototype has only four legs in the rear partand no legs in the frontal part. An inflatable balloon in thefrontal part can assist locomotion by preventing the capsule from
Fig. 2. Capsule prototype with closed legs and with open legs (top left).Worm gear (top right). Internal capsule body with motor shaft (bottom left). Allcomponents of the capsule (bottom right).
TABLE ICHARACTERISTICS OF THE DC BRUSHLESS NAMIKI MOTOR (NAMIKI
PRECISION JEWEL COMPANY, LTD., JAPAN)
slippage and by dilating the intestine that is normally collapsed.At this stage of development, the four back-leg solution hasbeen selected, in order to reduce the complexity of the designand of the manufacturing process, and in order to evaluate if theproposed legged locomotion strategy is adequate for propellingthe device into the gut.
B. Actuation System Description
The proposed actuation solution is illustrated in Fig. 3: itconsists of four helical gears mounted on a single worm gear,coaxial with the motor. Being all the helical gears mounted onthe same worm gear, their rotation occurs simultaneously.
This characteristic is the major limit for the locomotion flex-ibility of the capsule: it basically possesses just one active DoF,although the legs can passively adapt to the intestinal wall, asdescribed later in this paper. On the other hand, due to size con-straints (see Table I), independent DoFs for each leg cannot beobtained, by keeping the external diameter of the capsule to areasonable value for swallowing (approximately 10–15 mm).

172 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 13, NO. 2, APRIL 2008
Fig. 3. Overall design of the actuation system for activating four back legs.
The actuation mechanism has been designed strictly based onthe electromagnetic actuator features. First, we set the positionof the actuator (the electromagnetic actuator takes up to 23% ofthe total space available in the capsule); secondly, we selecteda mechanical drive for the legs motion.
The motor has been placed in the center of the capsule. Inthis way, the rotation axis of the motor is perpendicular and notintersecting the legs axis.
Thus, a worm gear drive has been selected. This mechanicaltransmission allows to achieve a high-ratio speed reduction, avery compact mechanism, and a good resistance to back driving,as detailed next.
1) A high speed reduction is mandatory for this application,because it allows us to increase the force available at thetip of the legs by decreasing the large output speed of themotor’s shaft (the output power is fixed).
2) The compactness of the mechanism is essential in order tokeep at a minimum the external diameter of the capsule:the final prototype is only 12 mm in diameter.
3) A high resistance to back driving is required in order tokeep the legs opened against the overhanging intestinaltissue, without electrical power consumption (the motorshould be switched OFF during this phase).
The four legs are placed on the back part of the capsule,inserted in four pulleys, which are connected to the helicoidalgear: thus, when the gears rotate, the legs rotate too. The pulleysare connected to the gear by means of a rectangular grooveallowing the torque transmission, while the leg is inserted in agroove built on the lateral surface of the pulley and fixed bymeans of an elastic junction (see Fig. 4).
The junction makes easy the connection (and disconnection)of the leg, thus speeding up the testing process of different legs.
C. Actuation System Dimensioning
The schematic model of one of the four gears of the actu-ation mechanism is illustrated in Fig. 4. The dimensioning ofthe system has been performed by considering the followingparameters: a helical gear with a normal module of 0.25 mmand a teeth number of 18, and a worm gear with only one thread(i = 1) and a helical angle of 7◦.
Fig. 4. Schematic model of the actuation mechanism.
The following should be noted.1) The value of the normal module mn has been selected
in order to keep acceptable the manufacturing cost of thegears; gears with a module lower than 0.25 mm would betoo expensive for first prototypes;
2) The number of teeth z2 has been defined taking into ac-count the noninterference condition and the maximum re-duction of the radial encumber of the drive (<12 mm), be-ing the geometry of the gear directly related to the numberof teeth (when the numerical value of the normal modulemn is fixed);
3) The value of the helical angle β = 7◦ has been selected asfunction of the number of thread i, in order to achieve themaximum efficiency of the drive according to the guide-lines reported in [32];
4) The efficiency η of the drive has been estimated as a func-tion of the helical angle β and of the friction coefficientbetween the gears, due to the sliding action occurring atthe mesh between worm and gear. The worm is fabricatedin steel and helical gears are fabricated bronze; thus thecoefficient of friction ϕ has been set to 0.16.
The typical relation [33] for estimating the efficiency of aworm gear reduction is
η =tan β (1 − ϕ tan β)
tan (β + ϕ)= 0.415. (1)
With reference to Fig. 5, Table II summarizes the relationshipsused for the dimensioning of the helical and worm gears.
From the efficiency of the driving, it is possible to estimatethe maximum resistance torque applicable to each gear thatis directly related to the propulsive force available at the legstip
η =Pout
Pin=
4MRω2
Mm ω1→ MR =
Mm
4ω1
ω2η =
Mm
41
τ21η (2)

QUIRINI et al.: DESIGN AND FABRICATION OF A MOTOR LEGGED CAPSULE 173
Fig. 5. Schematic model of one of the four gears of the actuation mechanism.
TABLE IIRELATIONS USED FOR THE DIMENSIONING OF THE DRIVE
where MR is the resistance torque applied to the helical gear;Mm is the total output torque of the motor; η is the efficiencyof the mechanical transmission; and τ21 is the transmissionratio.
By considering a 15-mm-length rigid leg, at an angle of 90◦
as regards the capsule body, we obtain
MR = F lo
MR =Mm
41
τ21η →
F =10.64
10.056
0.41515
∼= 1.3N (3)
where F is the theoretical propulsive force at the leg tip and lois the length of the leg. This value is larger than the theoreticalone estimated by the simulation (i.e., 0.25 N).
As a result of the design of the helical gear tooth, an axialthrust load (see Fig. 6) is transferred along the axis of the worm
Fig. 6. Forces between helicoidal gear and worm gear.
gear (Fw,a = Fg,t), whose value is given by
Fgt = Fwa =MR
d2/2nleg =→ Flo
d2/2nleg
=1.3 × 154.534/2
× 4 = 34.4 N (4)
where MR is the resistance torque, nleg is the total number oflegs, and d2 is the gear pitch circle.
Equation (4) shows that the value of the axial force exceedsthe acceptable force for the motor shaft (5 N, as reported inTable I). Therefore, the worm gear has been assembled apartfrom the motor, and supported by two Teflon bushings (seeFig. 7) that adsorb the axial thrust and make possible the rotationof the worm gear.
The transmission of the torque is possible through a rectan-gular pinhole connection in the motor shaft.
The end of the worm gear and the motor shaft have beenmachined by electrodischarge machining (EDM).
D. Leg Design
In addition to the actuation system, another key issue fordeveloping a reliable and efficient legged endoscopic capsule isthe interaction of the legs with the intestinal tissue.
The design of the legs is very critical and it deeply in-fluences the effectiveness of the locomotion in the GI tract.As reported in [34], a preliminary study in a dedicated testbench has been performed: the experimental results demon-strated that a superelastic leg with a flexible knee joint and

174 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 13, NO. 2, APRIL 2008
Fig. 7. View of the worm gear assembling.
Fig. 8. Superelastic legs of the capsule with different shapes.
with a hooked round tip is able to approach the tissue withoutdamage to the mucosa and to produce a propulsive force largerthan 0.25 N.
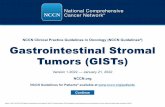
The legs, with four different shapes, are shown in Fig. 8 andtheir main features are reported next:
1) 15-mm rigid leg, with round shaped tip;2) 15-mm leg with flexible knee and round shaped
tip;3) 15-mm leg with flexible knee and round sharp tip (180◦
of maximum opening instead of 270◦ of the round shapedtip); this new sharp hook has been introduced in order toimprove the grip at the leg tip, which was not optimal inthe initial tests (Section VI).
4) 15-mm leg with opposite flexible knee and round sharptip; this leg has been designed in order to increase thepropulsion force during the opening phase (in fact, in thisphase the legs are completely rigid) and to reduce the forcenecessary to retract the legs during the closing phase (infact, the legs are flexible in this phase). An advantage ofthis leg shape is that there is no loss of energy (normallydue to the deformation of the flexible knee) during theactive phase. A disadvantage is that this leg is not well
Fig. 9. Overall view of the four-legged capsule prototype (left). Capsule withfrontal balloon and a detail of the spike pads (right).
adaptable to the different geometries and diameters of theGI tract.
The legs shown in Fig. 8 (b) and (c) are geometrically identicalexcept for the shape of the tip; by comparing the performances ofthese two legs, it is possible to understand how the shape of thetip affects the locomotion of the capsule. The legs shown in Fig.8(a) and (d) have been designed in order to extract informationconcerning the best strategy to be used to approach the intestinaltissue.
E. Vision System
The vision system has not been designed by the authors thatconsidered only integration issues of a commercial camera withthe capsule. The camera system consists of a CMOS sensor(10 mm in diameter and 9 mm in height) placed in the frontalpart of the capsule and in the center of an inflatable latex balloon.The balloon has the function of enlarging the tissue in frontthe capsule, thus permitting the vision of the intestine wall,and of centring the capsule in the lumen of the bowel. In ourexperiments, the balloon was equipped with four pads havingangled spikes (as better described in Section VI). These spikepads act as directional friction enhancers to support the stabilityof the robot inside the bowel and to reduce its slippage back.
The spike pads are fixed to the balloon approximately aroundits equatorial line (see Fig. 9).
The illumination module completes the vision system: fourwhite LEDs, placed around the CMOS camera, allow a uniformdistribution of light in front of the camera.
IV. FABRICATION OF THE LEGGED CAPSULE
AND DRIVING SYSTEM
In this paragraph, we describe the fabrication of the motorcapsule prototype and its assembly.
This device has been fabricated by the authors using a microCNC machine Kern Hspc, a Sarix Micro Sink EDM, and aSodick AP 200 L wire electrical discharge machine (WEDM).
The structural parts of the capsule have been fabricated byCNC micromachining; a high-performance polymer, PEEK, hasbeen employed for the manufacturing process of the body andfor the frontal and rear caps. The chassis integrating the gearshas been fabricated in ERGAL (an aluminium alloy), in orderto obtain a more precise and solid structure.
The gears have been partially machined by an external work-shop, and then, remachined by the authors according to ourrequirements: the helicoidal gears have been cut in the central

QUIRINI et al.: DESIGN AND FABRICATION OF A MOTOR LEGGED CAPSULE 175
Fig. 10. “T” groove for the connection with the pulley (left). Rectangulargroove of the worm gear shaft (right).
Fig. 11. Specific setup for the manufacturing process. (a) “T” groove.(b) Worm gear. (c) Legs.
Fig. 12. Motor shaft before and after the manufacturing process.
part in order to make a “T” groove that is necessary for theconnection with the pulley where the legs are inserted (seeFig. 10).
The worm gear has been cut at one end in order to fabricatea rectangular groove that is necessary for the connection withthe shaft of the dc brushless motor. For the positioning of thecomponents during the manufacturing process, specific setupshave been built (see Fig. 11).
The shaft of the dc brushless motor has been machined usingthe sink EDM in order to connect it with the worm gear. InFig. 12, the motor shaft before and after the manufacturingprocess is illustrated.
V. CONTROL SYSTEM
A. Motor
The brushless dc motor used in the legged capsule is not pro-vided with sensors: thus, no encoding devices are available forevaluating the rotor position. This measurement can be obtainedby using the current pulses output from the midpoint of the threemotor coils: counting pulses during motion allows to derive therotor position. Namiki Precision Jewel Company, Ltd., providesa full control system based on a brushless motor controller(LB1981 from Sanyo). We developed a board that connects theNamiki controller board to a PC and allows to manage signalsby using a simple dedicated human–machine interface (HMI).
In order to control the motor velocity, a potentiometer isplaced on the controller board, thus allowing to fix up a voltageproportional to motor velocity. We decided to bypass the poten-tiometer and connect the LB1981 pin directly to our board, thusallowing to control motor velocity from the HMI without inter-ference with the Namiki board. Furthermore, in order to avoidserious damages to the motor, the control board is provided witha simple amplifying circuit that monitors the output current fromthe motor; in case of high values of current detected, due, forexample, to rotor stall, the motion is automatically stopped.
B. Capsule Control
For controlling a brushless motor, several algorithms havebeen developed as in [35] and [36]. The main features for thecontrol of a miniaturized and teleoperated endoscopic capsuleexploring an unstructured environment, such as the human GI,are the following.
1) The capsule has to react quickly when an external com-mand by the medical doctor is received.
2) The capsule size must be kept as low as possible, and con-sequently, also the electronic components must be minia-turized.
Thus, we defined an open-loop control for the motorizedcapsule: from the HMI, legs aperture, closure angle, and motorvelocity can be fixed up; then the control system activates themotor and counts pulses; when the final number of pulses isreached, the control system stops the motor.
This control is implemented through a National Instruments6062 DAQ Card: a D/A channel is used as output voltage forvelocity setting, while two digital channels are used as output,for motor direction selection, and input, for the current pulsesto be counted. A simple schematic of the whole control systemis shown in Fig. 13.
When inside the GI tract, the capsule has to open and closeits legs periodically, with a specific spanning angle in order tomove forward. The interface we have developed for friendlydriving the capsule is illustrated in Fig. 14: it performs a peri-odical open–close cycle after fixing the aperture/closure angle.Furthermore, some LEDs on the HMI are used to notify if legsreached the full aperture or closure position during each cycle.In addition to these functionalities, the HMI provides the controlof motor velocity, rotation direction, and angle to be reached;it also monitors counted pulses and it possesses numerical

176 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 13, NO. 2, APRIL 2008
Fig. 13. Schematic diagram of the control system.
Fig. 14. HMI for capsule control.
coefficients used to convert angle into pulses number. Beforestarting the aperture/closure cycles, it is possible also to set anoffset angle for the legs; this allows to avoid full closure of thelegs that could cause entrapment of GI tissue in the capsule legslot.
During some preliminary trials, a small drift in the closureangle position was observed; thus a correction algorithm wasincluded in the HMI that, after a fixed number of cycles, adds asmall angle of closure to the normal one.
VI. EXPERIMENTS
This paragraph describes the experimental tests performedwith the motorized endoscopic capsule.
Due to the good reliability of the actuation mechanism, a deepinvestigation of the influence of the legs shape on the locomotionin the intestine was performed. Several types of leg, as describedin Section III-D, were realized and systematically tested.
For the examination of the locomotion performance of thecapsule in a realistic environment, we performed tests by usinga closed phantom model. A pig colon (explanted by a pig inrespect to the medical and ethical rules) was fixed in a frameat both ends and it was freely suspended (see Fig. 15). Theframe is provided with moving parts enabling the use of animalGI tracts of different inner diameter and/or length. In addition,the frame allows adjustment of GI tract end points to build upstraight, curved, and sloped shapes. The capsule was introducedfrom one end and was observed (see Fig. 16) from the otherend by a traditional endoscope Pentax 2940. The initial and
Fig. 15. Experimental bench used for suspending the porcine intestine.
Fig. 16. View of the capsule locomoting inside the porcine intestine.
final positions of the capsule have been marked from outside bymeans of external clips.
The capsule has been tested in different configurations byusing the different legs (a, b, c, d, see Section III-D) and a40-mm diameter frontal balloon with and without spikes. Thespikes have been introduced after a first session of tests, becausethe tendency of the capsule to slip back was observed. By in-troducing the spikes, the friction of the balloon surface with thecolon wall is increased, and therefore the slipping back of thecapsule is reduced.
In the assessment of the performance of the different legs inthe closed straight bowel model, the speed of the capsule duringlocomotion was measured. The distance travelled in 1 min wasmeasured by means of a ruler placed next to the bowel model.
Three repetitive measurements were carried out with each legtype and parameter configuration. Table III reports the resultsof the first test session, performed by using the four differentlegs, a spanning angle for leg motion of 100◦ and a 40-mm latexballoon without friction enhancers spikes.
According to Table III, the best performing leg is the legwith the reverse flexible knee (type “d”). Testing this leg, ajumping locomotion has been observed that allows the capsuleto go forward faster and with larger steps. This effect can bedescribed as follows: when the legs overcome the 90◦ openingangle, the elastic response of the stretched tissue pushes thecapsule forward, thus producing the mentioned jumping effect.The tissue is completely stretched due to the straight shape ofthe legs (that are rigid during the opening phase) and due tothe size matching between the lumen diameter and the capsulediameter, when the legs are open.

QUIRINI et al.: DESIGN AND FABRICATION OF A MOTOR LEGGED CAPSULE 177
TABLE IIIRESULTS OF THE FIRST TEST SESSION
TABLE IVRESULTS OF THE SECOND TEST SESSION
In real working conditions, the poor adaptability of leg “d”to the different diameters of the intestine in the opening phaserepresents an important limitation. A larger force is required foropening the tissue, due to the rigidity of the leg in the openingphase. This rigidity can produce also larger forces on the reduc-tion gears, thus increasing the possibility of mechanism failure.Finally, these larger mechanical stresses produce a larger powerconsumption of the device, thus limiting the operation time incase of wireless actuation and on-board power supply. Similarconsiderations are valid for the completely rigid leg (type “a”).
Based on the aforementioned considerations, a leg with a flex-ible joint at the knee (“b” or “c”) is the best tradeoff betweenadaptability to different geometries of the colon and ability topropel the capsule forward, even if some loss of energy occursduring the active phase due to the deformation of the flexibleknee. As reported in Table III, the “c” and “b” legs have approx-imately the same performance (12 mm/min). On the other hand,the contact between the leg and the tissue is not stable if usingthe leg with a more round-shaped tip (type “b”). Consequently,the leg “c” has been selected for performing the second sessionof tests.
The second test session has been performed by using leg“c”, a spanning angle of 100◦, and a latex balloon (3 cm indiameter) with spikes. The results are shown in Table IV andthey demonstrate that the following.
1) The spikes reduce the slippage effect, thus increasing thefriction between the capsule balloon and the colon wall;as direct consequence, the speed of the capsule increasedof about three times, from 10 to 30 mm/min.
2) After several steps, debris cover the tip of the leg so thatthe grip with the tissue is reduced and the performanceof the capsule get worse; after cleaning the leg tip theperformance of the capsule improve again (see Table IV,after test number 5).
VII. CONCLUSION AND FUTURE WORK
The endoscopic legged capsule designed, developed, andtested in this study demonstrates a significant progress in thedevelopment of an active locomotion endoscopic robot. Theobtained results support the feasibility of the leg-based propul-sion of smart capsules inside the digestive tract. A setback ofthe current device is the slipping effect at the end of each legaction cycle. This is only partly balanced by the friction en-hancers on the surface of the frontal balloon. In order to avoidthis effect, which is currently the most important limitation tothe locomotion efficiency, a second, frontal set of legs shouldbe considered [37]. These additional legs can counteract theunintended backwards motion of the capsule.
The design of the leg kinematics remains a topic of paramountimportance and requires further research. This also refers to thedesign of the legs tip. The current versions of legs tip havehook-shaped microstructures at the end. The circumference ofthe hook has a relevant influence on the ability of the leg todetach from the bowel wall at the end of the motion cycle. Ifthis detachment is not successful, there is a risk to fold the bowelwall instead of propelling the body of the capsule. Therefore, anadvanced evaluation of the hook design and also alternative hookstructures are important for further optimizing the locomotionperformance.
The current major limiting factor is related to the availabilityof microactuators with good reliability, thus allowing to increasethe flexibility of the capsule, the leg span, and the overall DoFs.A leg spanning angle of 100◦ has demonstrated to be adequatefor the overall locomotion results; on the other hand, larger legspanning angles might be helpful in the passage of curves or formaking the capsule actively steerable.
Based on the aforementioned observations, the authors willfocus their efforts on reducing capsule size, on adding a newset of legs in the frontal part of the capsule, and on integratingon-board both power supply and control-driving system in orderto obtain a wireless device.
The development of a completely wireless capsule is a verychallenging task, especially for power constraints: currently,the legged capsule has a power consumption of 200 mW (withelectronics). If next generations of capsules will require two mo-tors, an average power consumption of about 400 mW should beconsidered. The battery for operating the capsule should provide400 mW during at least 2 h, when the capsule travels actively inthe colon, and not less than 150 mW for 6–8 h, when the capsuletravels passively the others GI districts, by sending images out-side or measuring different parameters. Market available Li-Ion

178 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 13, NO. 2, APRIL 2008
batteries achieve only a capacity of 500 mW·h in a volume of1 cm3 ; thus they are not adequate for this application.
An effective possibility that the authors have devised is usinga wireless power transmission for recharging the batteries of thedevice when inside the human body [38]. This solution could beimplemented by using an external coil together with three smallcoils placed inside the capsule body.
ACKNOWLEDGMENT
The authors would like to thank Novineon Healthcare Tech-nology Partners GmbH, Tubingen Germany, for their help dur-ing the testing phase of the device. The authors are also gratefulto N. Funaro, C. Filippeschi, and G. Favati for manufacturingthe prototypes.
REFERENCES
[1] A. Cuschieri and A. Melzer, “The impact of technologies on minimallyinvasive therapy,” Surg. Endosc., vol. 11, no. 2, pp. 91–92, 1997.
[2] A. Cuschieri, “Minimally invasive surgery: Hepatobiliary-pancreatic andforegut,” Endoscopy, vol. 32, no. 4, pp. 331–344, 2000.
[3] B. V. MacFadyen and A. Cuschieri, “Endoluminal surgery,” Surg. En-dosc., vol. 19, no. 1, pp. 1–3, 2005.
[4] S. Schostek, H. Fischer, D. Kalanovic, and M. O. Schurr, “Microsystemsin medicine—Results of an international survey,” Minimally InvasiveTherapy Allied Technol., vol. 14, no. 8, pp. 360–368, 2005.
[5] P. Dario, B. Hannaford, and A. Menciassi, “Smart surgical tools andaugmenting devices,” IEEE Trans. Robot. Autom., vol. 19, no. 5, pp. 782–791, Oct. 2003.
[6] G. Iddan, G. Meron, A. Glukhovsky, and P. Swain, “Wireless capsuleendoscopy,” Nature, vol. 405, no. 6785, pp. 417–418, 2000.
[7] G. Meron, “The development of the swallable video capsule (M2A),”Gastrointest. Endosc., vol. 52, no. 6, pp. 817–819, 2000.
[8] P. Swain, G. Iddan, G Meron, and A Glukhovsky, “Wireless capsule en-doscopy of the small bowel. Development, testing and first human trials,”Proc. SPIE, vol. 4158, pp. 19–23, 2001.
[9] RF System Lab, NORIKA3. (2001). [Online]. Available: (English):http://www.rfamerica.com/sayaka/; (Japanese): http://www.rfsystemlab.com/norika/index.html (Accessed in 2008)
[10] Olympus. [Online]. Available: (English): http://www.olympus-global.com/en/news/2005b/nr051013capsle.cfm (Accessed in 2008)
[11] X. Y. Jian, T. Mei, and X. H. Wang, “Driving method of an endoscopicrobot capsule by external magnetic field,” Jiqiren/Robot, vol. 27, no. 4,pp. 367–372, 2005.
[12] H. J. Park, J. H. Lee, Y. K. Moon, Y. H. Yoon, C. H. Won, H. C. Choi, andJ. H. Cho, “New method of moving control for wireless endoscopic capsuleusing electrical stimuli,” IEICE Trans. Fundam. Electron., Commun.Comput. Sci., vol. E88, no. 6, pp. 1476–1479, 2005.
[13] I. Hayashi, N. Iwatsuki, and K. Morikawa, “An in-pipe operation micro-robot driven based on the principle of screw,” in Proc. IEEE Int. Symp.Micromechatron. Human Sci., 1997, pp. 125–129.
[14] K. Suzumori, T. Miyagawa, M. Kimura, and Y. Hasegawa, “Micro inspec-tion robot for 1-in pipes,” IEEE/ASME Trans. Mechatron., vol. 4, no. 3,pp. 286–292, Sep. 1999.
[15] H. Nishikawa, T. Sasaya, T. Shibata, T. Kaneko, N. Mitumoto, S. Kawakita,and N. Kawahara, “In-pipe wireless micro locomotive system,” in Proc.IEEE Int. Symp. Micro Mach. Human Sci., 1999, pp. 141–147.
[16] A. Brunete, M. Hernando, and E. Gambao, “Modular multiconfigurablearchitecture for low diameter pipe inspection microrobots,” in Proc. IEEEInt. Conf. Robot. Autom., 2005, pp. 490–495.
[17] L. Sun, Y. Zhang, P. Sun,, and Z. Gong, “Study on robot with PZT Actuatorfor small pipe,” in Proc. IEEE Int. Symp. Micromechatron. Human Sci.,2001, pp. 149–154.
[18] L. Phee, D. Accoto, A. Menciassi, C. Stefanini, M. C. Carrozza, andP. Dario, “Analysis and development of locomotion devices for the gas-trointestinal tract,” IEEE Trans. Biomed. Eng., vol. 49, no. 6, pp. 613–616,Jul. 2002.
[19] L. Phee, A. Menciassi, S. Gorini, G. Pernorio, A. Arena, and P. Dario,“An innovative locomotion principle for minirobots moving in the gas-
trointestinal tract,” in Proc. IEEE Int. Conf. Robot. Autom., 2002, vol. 2,pp. 1125–1130.
[20] P. Dario, P. Ciarletta, A. Menciassi, and B. Kim, “Modeling and experi-mental validation of the locomotion of endoscopic robots in the colon,”Int. J. Robot. Res., vol. 23, no. 4/5, pp. 549–556, 2004.
[21] D. Accoto, C. Stefanini, L. Phee, A. Arena, G. Pernorio, A. Menciassi,M. C. Carrozza, and P. Dario, “Measurements of the frictional propertiesof the gastrointestinal tract,” presented at the World Tribol. Congr., Vienna,Austria, 2001.
[22] A. Menciassi, C. Stefanini, S. Gorini, G. Pernorio, P. Dario, B. Kim, andJ. O. Park, “Legged locomotion in the gastrointestinal tract problem analy-sis and preliminary technological activity,” in Proc. IEEE Int. Conf. Intell.Robots Syst., 28 Sep.–2 Oct., 2004, vol. 1, pp. 937–942.
[23] K. Ikeuchi, K. Yoshinaka, S. Hashimoto, and N. Tomita, “Locomotionof medical micro robot with spiral ribs using mucus,” in Proc. IEEE Int.Symp. Micro Mach. Human Sci., 1996, pp. 217–222.
[24] S. Guo, J. Sawamoto, and Q. Pan, “A novel type of microrobot for biomed-ical application,” in Proc. IEEE Int. Conf. Intell. Robots Syst., Aug. 2–6,2005, vol. 1, pp. 1047–1052.
[25] Y. Guozheng, L. Qiuong, D. Guoqing, and Y. Detian, “The prototype of apiezoelectric medical robot,” in Proc. IEEE Int. Symp. Micromechatron.Human Sci., 2002, pp. 73–77.
[26] B. Kim, S. Lee, J. H. Park, and J. O. Park, “Design and fabrication of alocomotive mechanism for capsule-type endoscopes using shape memoryalloys (SMAs),” IEEE/ASME Trans. Mechatron., vol. 10, no. 1, pp. 77–86,Feb. 2005.
[27] A. Menciassi, C. Stefanini, S. Gorini, G. Pernorio, B. Kim, J. O. Park, andP. Dario, “Locomotion of a legged capsule in the gastrointestinal tract:Theoretical study and preliminary technological result,” in Proc. IEEEInt. Conf. Eng. Med. Biol., 2004, vol. 26, no. 4, pp. 2767–2770.
[28] P. Dario, A. Menciassi, C. Stefanini, S. Gorini, G. Pernorio, andD. Accoto, “Teleoperated endoscopic capsule equipped with active lo-comotion system,” Patent WO 2005082248, 2005.
[29] C. Stefanini, A. Menciassi, and P. Dario, “Modeling and experimentson a legged microrobot locomoting in a tubular, compliant and slipperyenvironment,” Int. J. Robot. Res., vol. 25, no. 5/6, pp. 551–560, 2006.
[30] S. M. Dutta and F. H. Ghorbel, “Differential hysteresis modeling of a shapememory alloy wire actuator,” IEEE/ASME Trans. Mechatron., vol. 10,no. 2, pp. 189–197, Apr. 2005.
[31] S. Gorini, M. Quirini, A. Menciassi, G. Pernorio, C. Stefanini, and P. Dario,“A novel SMA-based actuator for a legged endoscopic capsule,” in Proc.IEEE/RAS-EMBS Int. Conf. Biomed. Robot. Biomechatronics (BioRob),(2006), pp. 443–449.
[32] Gear Theory Manual. (2007). [Online]. Available: http://www.bostongear.com/pdf/gear_theory.pdf (Accessed in 2008)
[33] W. O. Davis, Gears for Small Mechanisms. Royal Leamington Spa,U.K.: TEE, 1993.
[34] M. Quirini, A. Menciassi, C. Stefanini, S. Gorini, G. Pernorio, and P. Dario,“Development of a legged capsule for the gastrointestinal tract: An ex-perimental set-up,” in Proc. IEEE Int. Conf. Robot. Biomimetics (RoBio),2005, pp. 161–167.
[35] C. Y. Su, Y. Stepanenko, and S. Dost, “Hybrid integrator backstepping con-trol of robotic manipulators driven by brushless DC motors,” IEEE/ASMETrans. Mechatron., vol. 1, no. 4, pp. 266–277, Dec. 1996.
[36] C. L. Lin, H. Y. Jan, and N. C. Shieh, “GA-based multiobjective PIDcontrol for a linear brushless DC motor,” IEEE/ASME Trans. Mechatron.,vol. 8, no. 1, pp. 56–65, Mar. 2003.
[37] M. Quirini, R. J. Webster, III, A. Menciassi, and P. Dario, “Design of apill-sized 12-leg endoscopic capsule robot,” in Proc. 23rd IEEE Intl. Conf.Robot. Autom—ICRA 2007, pp. 1856–1862.
[38] B. Lenaerts and R. Puers, “Inductive powering of a freely moving system,”Sens. Actuators A, Phys., vol. 123–124, pp. 522–530, 2005.
Marco Quirini (M’06) received the Laurea degree inmechanical engineering from the University of Pisa,Pisa, Italy, in 2004. He is currently working towardthe Ph.D. degree in bioengineering at the Scuola Su-periore Sant’Anna (SSSA), Pisa.
In April 2004, he joined the Center for Re-search in Microengineering (CRIM) Laboratory,SSSA. His current research interests include the fieldsof biomedical microrobotics, microfabrication tech-nologies, and micromechatronics and microsystemtechnologies.

QUIRINI et al.: DESIGN AND FABRICATION OF A MOTOR LEGGED CAPSULE 179
Arianna Menciassi (M’00) received the Laurea de-gree in physics (with honors) from the Universityof Pisa, Pisa, Italy, in 1995, and the Ph.D. degreein bioengineering from the Center for Research inMicroengineering (CRIM) Laboratory, Scuola Supe-riore Sant’Anna (SSSA), Pisa, in 1999.
She is currently a Professor of biomedical roboticsat the SSSA. She is engaged in several Europeanprojects and international projects for the develop-ment of minimally invasive instrumentation for med-ical applications. She is the author or coauthor of
more than 40 published journal papers. Her current research interests includethe fields of biomedical microrobotics, microfabrication technologies, and mi-cromechatronics and microsystem technologies.
Sergio Scapellato (M’05) received the Laurea degreein electronic engineering from the University of Pisa,Pisa, Italy, in 2002. He is currently working towardthe Ph.D. degree in bioengineering at the Scuola Su-periore Sant’Anna (SSSA), Pisa.
During 2003, he was with the Advanced RoboticsTechnology and Systems Laboratory (ARTS Labo-ratory), SSSA. His current research interests includesensor network development and applications, mo-tion analysis, biomimetic robot development, andbiomedical signals processing.
Cesare Stefanini (M’05) received the Laurea degreein mechanical engineering (with Honors) from theUniversity of Pisa, Pisa, Italy, in 1997, and the Ph.D.degree in microengineering from the Scuola Superi-ore Sant’Anna (SSSA), Pisa, in 2002.
Since 2003, he has been an Assistant Professor ofbiomedical engineering at the Center for Research inMicroengineering, SSSA. He is the author or coau-thor of seven articles published in refereed interna-tional journals, 19 papers published in internationalconference proceedings, and holds two international
patents. His current research interests include the field of small-scale biorobotics,micromechatronics, and tools for minimally invasive applications, and the issueof innovative microscale energy sources. He has received important interna-tional recognition for the development of novel actuators for microrobots.
Paolo Dario (F’02) received the Laurea degree inmechanical engineering from the University of Pisa,Pisa, Italy, in 1977.
He is currently a Professor of biomedical roboticsat the Scuola Superiore Sant’Anna (SSSA), Pisa,where he is also the Director at the Center for Re-search in Microengineering Laboratory. He also es-tablished and teaches the course on mechatronics atthe School of Engineering, University of Pisa. Hehas been a Visiting Professor at the Ecole Poly-technique Federale de Lausanne (EPFL), Lausanne,
Switzerland, and at Waseda University, Tokyo, Japan. His current researchinterests include the fields of medical robotics, mechatronics and microengi-neering, and specifically in sensors and actuators. He is the coordinator of manynational and European projects. He is the Editor of two books on the subject ofrobotics and is the author or coauthor of more than 200 scientific papers. He isa Member of the Board of the International Foundation of Robotics Research.
Prof. Dario is an Associate Editor of the IEEE TRANSACTIONS ON ROBOTICS
AND AUTOMATION, a member of the Steering Committee of the Journal ofMicroelectromechanical Systems, and a Guest Editor of the special issue onmedical robotics of the IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION.He is also the President of the IEEE Robotics and Automation Society, wherehe is the Co-Chairman of the Technical Committee on Medical Robotics.