Theology of Creativity: Neo-Confucian and (Neo-)Christian(?)

1
DEPLOYABLE LIGTH-WEIGHT STRUCTURES
FOR SURFACE EVA ON NEO AND LOW GRAVITY BODIES
Dr. Peter WEISS [1], Dr Bernard GARDETTE[1], Dr. Virginie TAILLEBOT[1], Thibaud GOBERT[1] [4],
Vincent GALLIX[2], Loïc BONNET[3]
[1] COMEX SA, [2] Gallix Design, [3] Ecole de l’Air, Salon [4] Laboratoire de mécanique et d’acoustique de Marseille
Main author’s address: Peter WEISS, COMEX SA, 36 Bvd des Océans, 13009 Marseille, France, [email protected]
Abstract
Human missions to new destinations such as Near-Earth Objects (NEO) and low gravity bodies are
amongst the targets in the current roadmaps of space agencies like the ISECG Global Exploration
Roadmap: NEO are an intermediate step stone for human exploration and technology demonstration
beyond ISS in the ambition to bring humans to Mars.
However, novel technologies need to be developed and validated that allow field exploration of the surface
of a low gravity body. The exploration and EVA on an asteroid by humans will look very differently than
what was done during the exploration of the lunar surface in the frame of the Apollo Program. It might
resemble rather to EVA in orbit as those performed on ISS today. The challenge however will be to
develop an infrastructure that allows an astronaut to move over the surface of NEO; thus a natural,
“uncooperative” surface. ISS is equipped with specific interfaces that help astronauts to move along the
hull of the station while being secured. Similar elements need to be developed that feature interfaces for
human intervention but that can be deployed on the surface of low-gravity bodies by a robotic landing
vehicle. The presentation will give an outlook on a current development at COMEX in cooperation with
the French École de l’Air and GALLIX Design to integrate ISS-type EVA elements into a light-weight and
deployable structure for human NEO exploration. Surface EVA procedures adapted to micro-gravity field
exploration will be discussed and a concept of the intervention structure will be shown. The development
will go through concept design towards a prototype development which will be validated in neutral
buoyancy conditions at the subsea analogue site in Marseille, France.
The developments of this project can serve future missions towards asteroids, such as NASA’s ARU
mission proposal, or even for crewed missions to destinations such as Mars’ moon Phobos.
Figure 1: Neutral Buoyancy Simulation in the COMEX’ pool (Ground Based Facility) with a NEO intervention structure based on the Gallix design [Image: Marc DELAUZE, COMEX]

2
The next Giant Leaps: From ISS to the Moon to asteroids
A new era of space exploration needs to be designed for the planned end of the International Space
Station (ISS). Near-Earth Objects (NEO) figure amongst the potential targets together with a return to the
lunar surface or a manned mission to Mars. These objects host a large potential in terms of scientific
return since asteroids are considered as pristine remnants of the creation of the solar system. They
present a potential danger in the case such an object’s trajectory crosses Earth’s orbit; today humanity
has no valid response to such threat. And they are considered as a potential source of material rare on
Earth or useful for space exploration. Today several industrial companies seriously consider concepts of
harvesting rare earths and other precious elements on the surface of asteroids. While the latter driving
force is often considered as utopic, one must keep in mind that searching for oil and gas in 3000 meters
water depth seemed utopic only some decades ago - but it is reality today. Such initiative should not
remain unconsidered, because bringing industrial/commercial utilizations into space exploration has often
been a win-win situation for both fields. While America is open to such initiatives, Europe is still very
reluctant to take the risk.
Near-Earth Objects are amongst the targets for manned missions to explore the solar system. The
International Space Exploration Coordination Group (ISECG) that includes most of world’s space
agencies issued a Global Exploration Roadmap that include manned missions to Near-Earth Asteroids
[ISECG, 2013].
Figure 2: ISECG Global Exploration Roadmap with asteroids as targets for manned missions [ISECG, 2013]
3
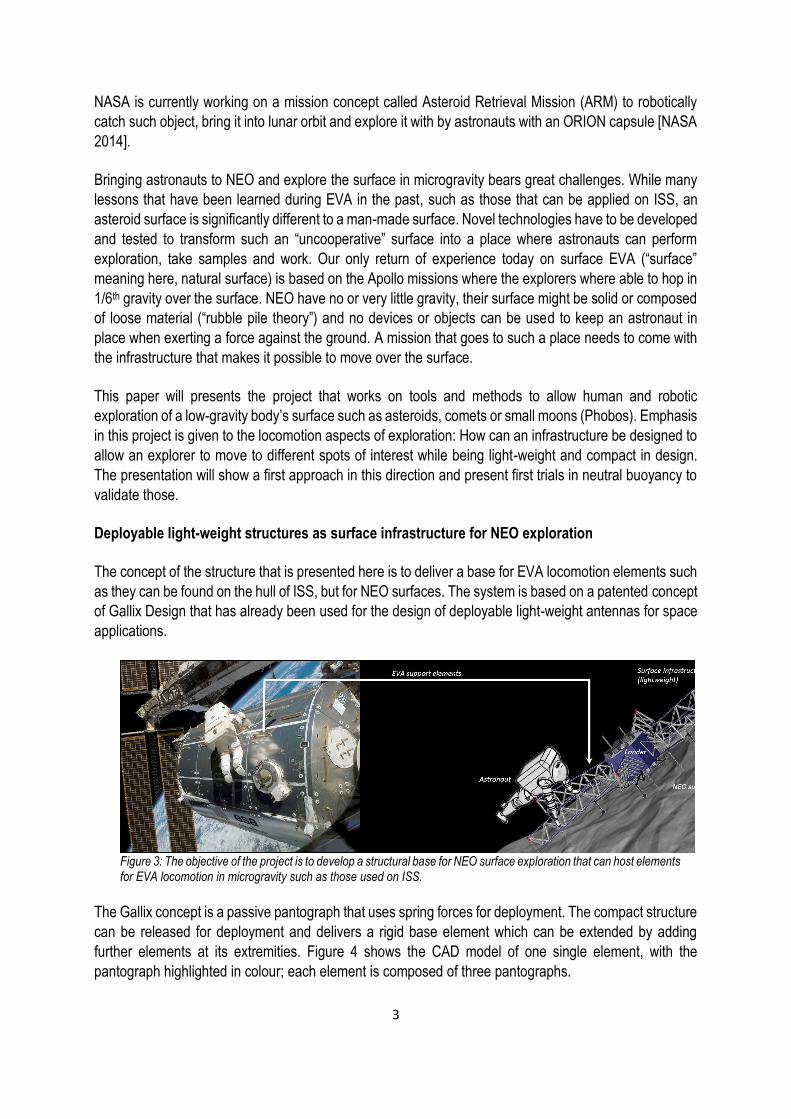
NASA is currently working on a mission concept called Asteroid Retrieval Mission (ARM) to robotically
catch such object, bring it into lunar orbit and explore it with by astronauts with an ORION capsule [NASA
2014].
Bringing astronauts to NEO and explore the surface in microgravity bears great challenges. While many
lessons that have been learned during EVA in the past, such as those that can be applied on ISS, an
asteroid surface is significantly different to a man-made surface. Novel technologies have to be developed
and tested to transform such an “uncooperative” surface into a place where astronauts can perform
exploration, take samples and work. Our only return of experience today on surface EVA (“surface”
meaning here, natural surface) is based on the Apollo missions where the explorers where able to hop in
1/6th gravity over the surface. NEO have no or very little gravity, their surface might be solid or composed
of loose material (“rubble pile theory”) and no devices or objects can be used to keep an astronaut in
place when exerting a force against the ground. A mission that goes to such a place needs to come with
the infrastructure that makes it possible to move over the surface.
This paper will presents the project that works on tools and methods to allow human and robotic
exploration of a low-gravity body’s surface such as asteroids, comets or small moons (Phobos). Emphasis
in this project is given to the locomotion aspects of exploration: How can an infrastructure be designed to
allow an explorer to move to different spots of interest while being light-weight and compact in design.
The presentation will show a first approach in this direction and present first trials in neutral buoyancy to
validate those.
Deployable light-weight structures as surface infrastructure for NEO exploration
The concept of the structure that is presented here is to deliver a base for EVA locomotion elements such
as they can be found on the hull of ISS, but for NEO surfaces. The system is based on a patented concept
of Gallix Design that has already been used for the design of deployable light-weight antennas for space
applications.
Figure 3: The objective of the project is to develop a structural base for NEO surface exploration that can host elements for EVA locomotion in microgravity such as those used on ISS.
The Gallix concept is a passive pantograph that uses spring forces for deployment. The compact structure
can be released for deployment and delivers a rigid base element which can be extended by adding
further elements at its extremities. Figure 4 shows the CAD model of one single element, with the
pantograph highlighted in colour; each element is composed of three pantographs.
4
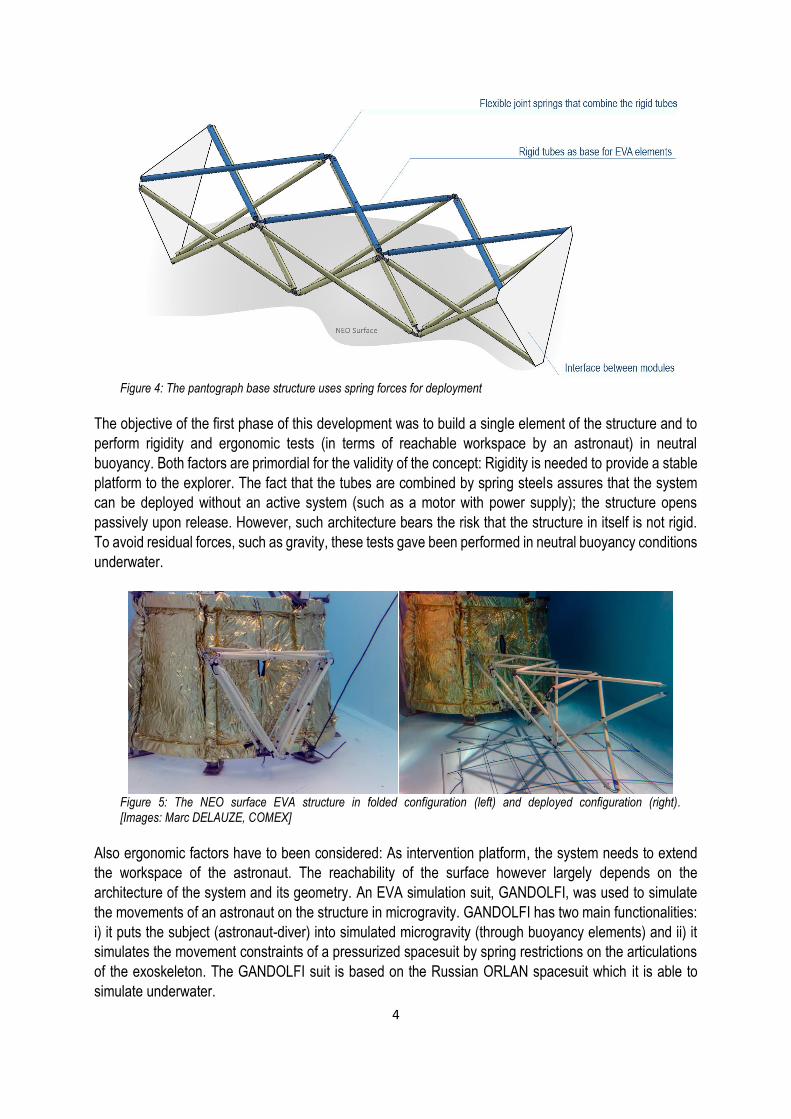
Figure 4: The pantograph base structure uses spring forces for deployment
The objective of the first phase of this development was to build a single element of the structure and to
perform rigidity and ergonomic tests (in terms of reachable workspace by an astronaut) in neutral
buoyancy. Both factors are primordial for the validity of the concept: Rigidity is needed to provide a stable
platform to the explorer. The fact that the tubes are combined by spring steels assures that the system
can be deployed without an active system (such as a motor with power supply); the structure opens
passively upon release. However, such architecture bears the risk that the structure in itself is not rigid.
To avoid residual forces, such as gravity, these tests gave been performed in neutral buoyancy conditions
underwater.
Figure 5: The NEO surface EVA structure in folded configuration (left) and deployed configuration (right). [Images: Marc DELAUZE, COMEX]
Also ergonomic factors have to been considered: As intervention platform, the system needs to extend
the workspace of the astronaut. The reachability of the surface however largely depends on the
architecture of the system and its geometry. An EVA simulation suit, GANDOLFI, was used to simulate
the movements of an astronaut on the structure in microgravity. GANDOLFI has two main functionalities:
i) it puts the subject (astronaut-diver) into simulated microgravity (through buoyancy elements) and ii) it
simulates the movement constraints of a pressurized spacesuit by spring restrictions on the articulations
of the exoskeleton. The GANDOLFI suit is based on the Russian ORLAN spacesuit which it is able to
simulate underwater.

5
Figures 6 and 7 show different configurations of the Gallix surface structure (based on an anchored lander
scenario and an orbiter scenario). The architecture is versatile to be extended on various surface
morphologies for exploration, while allowing a large workspace of the astronaut.
Figure 6: Surface architecture based on an anchored lander scenario. (Lander not in scale)
Figure 7: Surface architecture based on an orbiter scenario. (Orbiter not in scale)
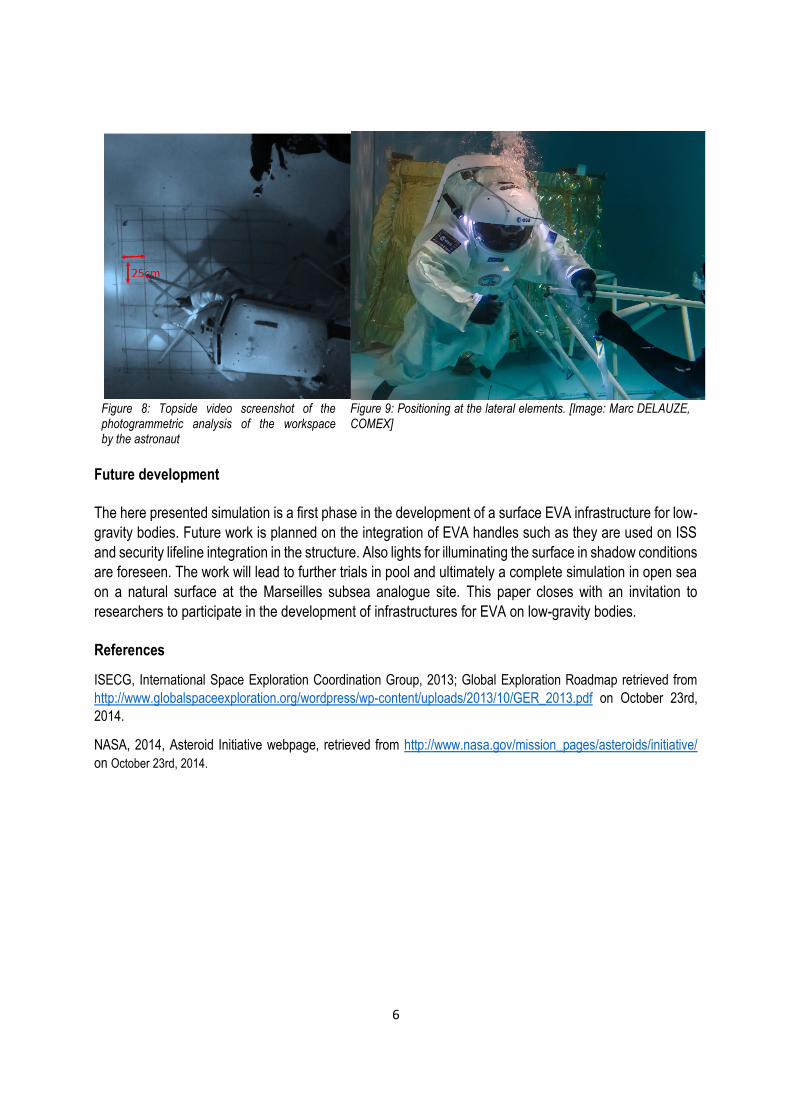
Trials in Neutral Buoyancy
Trials with a prototype structure in the COMEX neutral buoyancy pool (ESA Ground Based Facility)
confirmed the soundness of the concept. The structure was mounted on a simulated lander base and
deployed automatically when released. An astronaut-diver suited with GANDOLFI performed workspace
measurements on the structure and was able to reach the bottom of the pool when working on the topside
of the system. In this position, the subject was able to reach out to the surface which was placed around
20 cm above the surface to positions in 50cm distance. This workspace can obviously be extended when
the astronaut leaves the topside of the structure and moves towards the lateral elements (see Figure 9).
The overall rigidity of the system can be improved, movements were mainly related to the fixation of the
structure to the lander base and the fact that in deployed mode it was not blocked.
6
Figure 8: Topside video screenshot of the photogrammetric analysis of the workspace by the astronaut
Figure 9: Positioning at the lateral elements. [Image: Marc DELAUZE, COMEX]
Future development
The here presented simulation is a first phase in the development of a surface EVA infrastructure for low-
gravity bodies. Future work is planned on the integration of EVA handles such as they are used on ISS
and security lifeline integration in the structure. Also lights for illuminating the surface in shadow conditions
are foreseen. The work will lead to further trials in pool and ultimately a complete simulation in open sea
on a natural surface at the Marseilles subsea analogue site. This paper closes with an invitation to
researchers to participate in the development of infrastructures for EVA on low-gravity bodies.
References
ISECG, International Space Exploration Coordination Group, 2013; Global Exploration Roadmap retrieved from
http://www.globalspaceexploration.org/wordpress/wp-content/uploads/2013/10/GER_2013.pdf on October 23rd,
2014.
NASA, 2014, Asteroid Initiative webpage, retrieved from http://www.nasa.gov/mission_pages/asteroids/initiative/
on October 23rd, 2014.
Copyright © 2022 FDOKUMEN