Cooperative synchronization and channel estimation in wireless sensor networks
10
JOURNAL OF COMMUNICATIONS AND NETWORKS 1 Cooperative Synchronization and Channel Estimation in Wireless Sensor Networks Mi-Kyung Oh, Xiaoli Ma, Georgios B. Giannakis, and Dong-jo Park Abstract: A critical issue in applications involving networks of wire- less sensors is their ability to synchronize, and mitigate the fading propagation channel effects. Especially when distributed “slave” sensors (nodes) reach-back to communicate with the “master” sen- sor (gateway), low-power cooperative schemes are well motivated. Viewing each node as an antenna element in a multi-input multi- output (MIMO) multi-antenna system, we design pilot patterns to estimate the multiple carrier frequency offsets (CFO), and the multiple channels corresponding to each node-gateway link. Our novel pilot scheme consists of non-zero pilot symbols along with zeros, which separate nodes in a TDMA fashion, and lead to low- complexity schemes because CFO and channel estimators per node are decoupled. The resulting training algorithm is not only suit- able for wireless sensor networks, but also for synchronization and channel estimation of single- and multi-carrier MIMO systems. We investigate the performance of our estimators analytically, and with simulations. Index Terms: Sensor networks, Synchronization, Channel estima- tion, MIMO, Cram´ er-Rao Bound. I. INTRODUCTION There has been a growing interest towards wireless sensor networks that emerge as a new wireless network paradigm cap- italizing on the cooperation among a large number of sen- sors [2]. A distinct feature of such networks is that reliability and fault tolerance is achieved through combining information from distributed sensors. These characteristics are attractive for both commercial and military communication networks [2, 4, 6]. Moreover, efforts are under way to standardize the various layers of wireless sensor network communications; the IEEE 802.15.4 Low Rate Wireless Personal Area Network (WPAN) standard, and IEEE 1451.5 Wireless Smart Transducer Interface standard [21]. A bulk of research in wireless sensor networks focuses on low-power cooperative schemes. However, most works assume error-free communication channels, and perfect synchronization between each node-gate link [6]. Since pragmatic wireless links entail channel-induced interference, as well as timing and fre- quency offsets, it is necessary to account for these effects when designing distributed sensor networks. This motivates us to pur- Manuscript received October 27, 2003; approved for publication by Dr. Fu- miyuki Adachi, Associate Editor, June 5, 2005. M.-K Oh and D.-J. Park are with the Dept. of Electrical and Computer Science, Korea Advanced Institute of Science and Technology (KAIST), 373- 1 Guseong-dong, Yuseong-gu, Daejon, 305-701, Republic of Korea. (emails: [email protected], [email protected]) X. Ma is with the Dept. of Electrical and Computer Engr., Auburn University, Auburn, AL 36849, USA. (email: [email protected]) G. B. Giannakis is with the Dept. of Electrical and Computer Engr., Univer- sity of Minnesota, 200 Union Street, Minneapolis, MN 55455, USA. (email: [email protected]) sue channel and carrier frequency offset (CFO) estimation algo- rithms for wireless sensor networks. We suppose that each sensor node has a single antenna to transmit and receive data, while the central processing unit (a.k.a. gateway, or fusion center) is capable of deploying several receive-antennas. In this setting, the overall sensor network can be viewed as multi-antenna point-to-point link. The ergodic (av- erage) capacity of wireless multi-antenna channels can increase linearly with the number of antennas at the transmitter/receiver, provided that perfect channel estimates are available at the re- ceiver [3, 22, 23]. Errors in the channel and synchronization estimates can significantly degrade error performance, and ca- pacity. On the other hand, as the number of sensor nodes in- creases, channel estimation becomes more challenging because the number of unknowns increases accordingly. Since this multi-sensor environment is similar to a multi- antenna system, existing multi-input multi-output (MIMO) channel estimators apply. For example, the channel estimators in [8, 12] and [15] can be recast in a wireless sensor network setting, even though they do not address CFO estimation. The importance of the latter can be appreciated if we recall that sen- sor oscillators can never be perfectly synchronous. Furthermore, even with ideal oscillators CFOs are present in a mobile en- vironment with pronounced Doppler shifts. For point-to-point links, existing CFO estimators can be either data-aided [9, 10], or non-data aided [7]. Blind methods typically require longer data records, and have rather high computational complexity. On the other hand, data-aided schemes based on training sym- bols (known to both transmitter and receiver) are bandwidth consuming, but they are computationally attractive. Since sen- sors are generally limited in power and computational capabili- ties, training schemes with low-complexity and low-duty cycle are well motivated. In this paper, we consider cooperative synchronization and channel estimation in wireless sensor networks. Specifically, we design training patterns for estimating the associated multi- ple CFOs and frequency-selective channels. Our goal should be contrasted with previous works that either estimate a sin- gle CFO common to all transmit antennas [5], or a single-input single-output (SISO) channel [10]. We design training symbols that enable decoupling CFO and channel estimation from sen- sor to sensor, based on time division multiple access (TDMA), which in turn leads to low-complexity and low-duty cycle op- erations. Unlike existing algorithms [9, 10], our CFO estima- tors have full acquisition range, and the proposed channel esti- mators are not only suitable for wireless sensor networks, but also apply to single carrier multi-antenna point-to-point links. In addition, our training scheme can be directly applied to a multi-user multi-carrier system having distinct CFO between 1229-2370/03/$10.00 c 2003 KICS
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Cooperative synchronization and channel estimation in wireless sensor networks

JOURNAL OF COMMUNICATIONS AND NETWORKS 1
Cooperative Synchronization and Channel Estimationin Wireless Sensor Networks
Mi-Kyung Oh, Xiaoli Ma, Georgios B. Giannakis, and Dong-jo Park
Abstract: A critical issue in applications involving networks of wire-less sensors is their ability to synchronize, and mitigate the fadingpropagation channel effects. Especially when distributed “slave”sensors (nodes) reach-back to communicate with the “master” sen-sor (gateway), low-power cooperative schemes are well motivated.Viewing each node as an antenna element in a multi-input multi-output (MIMO) multi-antenna system, we design pilot patternsto estimate the multiple carrier frequency offsets (CFO), and themultiple channels corresponding to each node-gateway link. Ournovel pilot scheme consists of non-zero pilot symbols along withzeros, which separate nodes in a TDMA fashion, and lead to low-complexity schemes because CFO and channel estimators per nodeare decoupled. The resulting training algorithm is not only suit-able for wireless sensor networks, but also for synchronization andchannel estimation of single- and multi-carrier MIMO systems. Weinvestigate the performance of our estimators analytically, and withsimulations.
Index Terms: Sensor networks, Synchronization, Channel estima-tion, MIMO, Cram er-Rao Bound.
I. INTRODUCTION
There has been a growing interest towards wireless sensornetworks that emerge as a new wireless network paradigm cap-italizing on the cooperation among a large number of sen-sors [2]. A distinct feature of such networks is that reliabilityand fault tolerance is achieved through combining informationfrom distributed sensors. These characteristics are attractive forboth commercial and military communication networks [2,4,6].Moreover, efforts are under way to standardize the various layersof wireless sensor network communications; the IEEE 802.15.4Low Rate Wireless Personal Area Network (WPAN) standard,and IEEE 1451.5 Wireless Smart Transducer Interface standard[21].
A bulk of research in wireless sensor networks focuses onlow-power cooperative schemes. However, most works assumeerror-free communication channels, and perfect synchronizationbetween each node-gate link [6]. Since pragmatic wireless linksentail channel-induced interference, as well as timing andfre-quency offsets, it is necessary to account for these effectswhendesigning distributed sensor networks. This motivates us to pur-
Manuscript received October 27, 2003; approved for publication by Dr. Fu-miyuki Adachi, Associate Editor, June 5, 2005.
M.-K Oh and D.-J. Park are with the Dept. of Electrical and ComputerScience, Korea Advanced Institute of Science and Technology (KAIST), 373-1 Guseong-dong, Yuseong-gu, Daejon, 305-701, Republic of Korea. (emails:[email protected], [email protected])
X. Ma is with the Dept. of Electrical and Computer Engr., Auburn University,Auburn, AL 36849, USA. (email: [email protected])
G. B. Giannakis is with the Dept. of Electrical and Computer Engr., Univer-sity of Minnesota, 200 Union Street, Minneapolis, MN 55455,USA. (email:[email protected])
sue channel and carrier frequency offset (CFO) estimation algo-rithms for wireless sensor networks.
We suppose that each sensor node has a single antenna totransmit and receive data, while the central processing unit(a.k.a. gateway, or fusion center) is capable of deploying severalreceive-antennas. In this setting, the overall sensor network canbe viewed as multi-antenna point-to-point link. The ergodic (av-erage) capacity of wireless multi-antenna channels can increaselinearly with the number of antennas at the transmitter/receiver,provided that perfect channel estimates are available at the re-ceiver [3, 22, 23]. Errors in the channel and synchronizationestimates can significantly degrade error performance, andca-pacity. On the other hand, as the number of sensor nodes in-creases, channel estimation becomes more challenging becausethe number of unknowns increases accordingly.
Since this multi-sensor environment is similar to a multi-antenna system, existing multi-input multi-output (MIMO)channel estimators apply. For example, the channel estimatorsin [8, 12] and [15] can be recast in a wireless sensor networksetting, even though they do not address CFO estimation. Theimportance of the latter can be appreciated if we recall thatsen-sor oscillators can never be perfectly synchronous. Furthermore,even with ideal oscillators CFOs are present in a mobile en-vironment with pronounced Doppler shifts. For point-to-pointlinks, existing CFO estimators can be either data-aided [9,10],or non-data aided [7]. Blind methods typically require longerdata records, and have rather high computational complexity.On the other hand, data-aided schemes based on training sym-bols (known to both transmitter and receiver) are bandwidthconsuming, but they are computationally attractive. Sincesen-sors are generally limited in power and computational capabili-ties, training schemes with low-complexity and low-duty cycleare well motivated.
In this paper, we consider cooperative synchronization andchannel estimation in wireless sensor networks. Specifically,we design training patterns for estimating the associated multi-ple CFOs and frequency-selective channels. Our goal shouldbe contrasted with previous works that either estimate a sin-gle CFO common to all transmit antennas [5], or a single-inputsingle-output (SISO) channel [10]. We design training symbolsthat enable decoupling CFO and channel estimation from sen-sor to sensor, based on time division multiple access (TDMA),which in turn leads to low-complexity and low-duty cycle op-erations. Unlike existing algorithms [9, 10], our CFO estima-tors have full acquisition range, and the proposed channel esti-mators are not only suitable for wireless sensor networks, butalso apply to single carrier multi-antenna point-to-pointlinks.In addition, our training scheme can be directly applied to amulti-user multi-carrier system having distinct CFO between
1229-2370/03/$10.00c© 2003 KICS

2 JOURNAL OF COMMUNICATIONS AND NETWORKS
PU
Sensor Field
Wireless Links
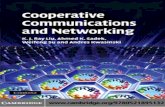
Fig. 1. Schematic system model for wireless sensor networks
each transmit-receive link, which has not been considered in anyexisting literatures.
The rest of the paper is organized as follows. In Section II, wedescribe our system model. The algorithms for estimating mul-tiple CFOs and channels are derived in Section III. In SectionIV, we show that our estimator can be used for multi-user multi-carrier systems. Performance of our estimators is analyzedinSection V. In Section VI, simulation results demonstrate thepotential of our algorithms, while Section VII concludes thispaper.
Notation: Upper (lower) bold face letters indicate matrices(column vectors). Superscript(·)H will denote Hermitian,(·)T
transpose, and(·)∗ conjugate. The real and imaginary parts aredenoted as<[·] and=[·]. E[·] and Var[·] will stand for expec-tation and variance, tr[·] for trace operation, and diag[x] for adiagonal matrix withx on its main diagonal. For a vector,‖ · ‖denotes the Euclidean norm. We will use[A]k,m to denote the(k,m)th entry of a matrixA, and [x]m for the mth entry ofthe column vectorx; IN to denote theN × N identity matrix;[FN ]m,n = N (1/2)exp(−j2πmn/N) the N × N fast fouriertransform (FFT) matrix.
II. SYSTEM MODEL AND ASSUMPTIONS
Fig. 1 depicts our system model that includesNs sen-sors (nodes) in the sensor field communicating with a cen-tral processing unit (PU) equipped with multiple antennas sig-nalling over wireless channels. The fading channels betweeneach sensor and the PU entail rich scattering and have delayspread greater than the symbol period; i.e., they are frequency-selective. Define the discrete-time baseband equivalent channelfrom theµth sensor to theνth receive-antenna ash(ν,µ)(l), l ∈[0, L]. We note that the channel sounder can be used to char-acterize the wireless channel [19]. In addition to multi-path,this equivalent channel incorporates also transmit- and receive-filters, as well as timing offsets in the form of pure delay factors.Let the CFO between oscillator of theµth sensor and theνthreceive-antenna of the PU be denoted asf
(ν,µ)o (in Hz), which
could be due to Doppler, or, mismatch between sensor-receiveoscillators.
To estimate theNs channels and theNs CFOs for eachreceive-antenna, pilot symbols{pµ(n)}Ns
µ=1, n ∈ I := [0, N −1], are transmitted by theµth sensor. Samples at theνth antenna
output of the PU can be written as:
xν(n) =
Ns∑
µ=1
ejω(ν,µ)o
nL
∑
l=0
h(ν,µ)(l)pµ(n − l) + ην(n), (1)
wheren ∈ [0, N − 1]; ω(ν,µ)o := 2πf
(ν,µ)o T is the normalized
CFO with T denoting sampling period which is chosen equalto the symbol period; andην(n) is zero-mean, white, complexGaussian distributed noise with varianceσ2
ην.
The PU is responsible for scheduling sensor transmissions.To facilitate scheduling, we require that the sensor signals bedelivered to the PU with a small delay, which can be ensured ifthe PU transmits a beacon, that sensors can synchronize to. Astiming acquisition is beyond the scope of this paper, we supposethat it has been accomplished, and incorporate residual timingerrors in the channel orderL. The information-bearing sym-bols are transmitted following the training preamble. Becausethe channel is frequency-selective, time-dispersive interferenceemerges between information and training symbols. The re-ceived samplesxν(n) in (1) correspond solely to the transmittedpilots, excluding those that contain interference from theinfor-mation symbols.
On the other hand, sensor networks need to handle thousandsof sensor nodes. We assume that this problem can be solved byadapting a very efficient medium access control (MAC) tech-niques to accommodate thousands of sensor nodes [21], whichis beyond the scope of this paper. In this paper, we considermultiple access in the physical layer, for which limited numberof sensor nodes can access the channel at the same time.
III. ESTIMATING MULTIPLE CFOS AND CHANNELS
We wish to estimate the carrier frequency offsets{ω(ν,µ)o }Ns
µ=1
and the channels{h(ν,µ)}Ns
µ=1, whereh(ν,µ) := [h(ν,µ)(0), . . .
, h(ν,µ)(L)]T , based on theνth antenna received samples{xν(n)}N−1
n=0 and the pilots{pµ(n)}Ns
µ=1, n ∈ I. Equation (1)shows that estimating CFOs and channels fromxν(n) andpµ(n)is a non-linear problem, whose solution is computationallypro-hibitive. We will thus decouple CFO and channel estimation foreach sensor using a TDMA scheme, and we will show that theresulting estimators enjoy low-complexity and guarantee iden-tifiability. TDMA is chosen because it leads to the desirablelow-duty cycle sensor operation, which is important for energyefficiency.
For clarity, we will start our design of pilot symbols with asingle sensor. Design of pilot symbols for multiple sensorswillbe described in Section III-B.
A. Single sensor
For a single sensor, we drop the sensor indexµ, and thus (1)reduces to
xν(n) = ejω(ν)o
nL
∑
l=0
h(ν)(l)p(n − l) + ην(n), (2)
wheren ∈ [0, N−1], andN is the total number of pilot symbols.Let us define the set of pilot symbols asIp := [0, Np−1], whereNp = N − L.

OH et al.: COOPERATIVE SYNCHRONIZATION AND CHANNEL ESTIMATION 3
To further reduce complexity, we also wish to separate CFOfrom channel estimation. Note that the CFO appears as a multi-plicative factor in each received symbol. This suggests selectingpilots to keep the sum in (2) identical for at least twoxν(n)’s,and estimating the CFO from their phase difference.
Targeting such an approach, we select pilot symbols as fol-lows:
p(n) =
{ √
Ep · ρn , n ∈ Ip
0 , n ∈ Ip,o, (3)
whereρ is an arbitrary complex number with|ρ|2 = 1, andEp isthe energy of the training symbol, which could be chosen equalto the energy of the information symbolEs. The set of zeropilots is defined asIp,o := [Np, N − 1].
Substituting (3) into (2), we obtain
xν(n) =√
Ep · ejω(ν)o
nρnL
∑
l=0
h(ν)(l)ρ−l + ην(n), (4)
for n ∈ [L,Np − 1]. If H(ν)(ρ) :=∑L
l=0 h(ν)(l)ρ−l 6= 0, thenoise free version of (4) can be written as:
xν(n + 1) = ρejω(ν)o xν(n), for n ∈ [L,Np − 2]. (5)
Clearly, we requireNp − 2 ≥ L in (5), which implies that theminimum number of pilots isNp ≥ L + 2. The CFO estimatorfollows easily from (5) in closed-form:
ω(ν)o = tan−1
Np−2∑
n=L
=[xν(n + 1)ρ∗x∗
ν(n)]
/
Np−2∑
n=L
<[xν(n + 1)ρ∗x∗
ν(n)]
,
(6)
and should be intuitively expected since in the absence of noise,the phase ofxν(n + 1)ρ∗x∗
ν(n) equalsω(ν)o . We also note from
(6) that the accuracy of CFO estimator increases, as the numberof training symbolsNp increases.
Based on the estimated CFO in (6), we can compensate forthe CFOω
(ν)o from xν(n) in (2), and proceed with channel esti-
mation. To derive our channel estimator, we temporarily assumethat the CFO estimate is perfect; i.e.,ω
(ν)o = ω
(ν)o . By simply
formingyν(n) := exp (−jω(ν)o n)xν(n), we then obtain
yν(n) =L
∑
l=0
h(ν)(l)p(n − l) + η(n), for n ∈ [0, N − 1]. (7)
Using the least-squares (LS) approach, we can easily estimatethe channel as [c.f. (7)]:
h(ν)LS = (PHP)−1PHyν , (8)
whereP is a Toeplitz matrix with entries[P]i,j := p(i−j), 0 ≤i ≤ N − 1, 0 ≤ j ≤ L, andyν := [yν(0), . . . , yν(N − 1)]T . If
the channel covariance matrixRh(ν) := E[h(ν)h(ν)H] and thenoise varianceσ2
η are available, a linear minimum mean square
error (LMMSE) channel estimator can be used instead of the LSone in (8), which can be expressed as:
h(ν)LMMSE = (σ2
ηR−1h(ν) + PHP)−1PHyν . (9)
The natural question that arises at this point is whether wecan always findρ such thatH(ν)(ρ) 6= 0. If ρ in (3) satisfiesH(ν)(ρ) = 0, then CFO is non-identifiable. To guarantee iden-tifiability, one needs to collect additional observations (4) formore thanL distinctρ’s. If we choose(L + 1) pointsρl ∈ C,l = 0, . . . , L, such thatρm 6= ρn, ∀m 6= n, we have
H(ν)(ρ0)H(ν)(ρ1)
...H(ν)(ρL)
=
1 ρ−10 · · · ρ−L
0
1 ρ−11 · · · ρ−L
1...
.... . .
...1 ρ−1
L · · · ρ−LL
h(ν)(0)h(ν)(1)
...h(ν)(L)
:= Θh(ν).
(10)
We note that the Vandermonde matrixΘ in (10) has always fullrank, sinceh(ν) 6= 0, and we can obtain at least one nonzeroH(ν)(ρl) among(L + 1) blocks. The set{ρl}
Ll=0 is clearly not
unique. For example, if we selectρl = ej2πl/(L+1) for l =0, 1, . . . , L, thenΘ in (10) becomes unitary matrix
√
(L + 1) ·FL+1, whereFL+1 is an(L + 1) × (L + 1) FFT matrix.
B. Multiple sensors
In the previous subsection, we designed the pilot pattern toestimate the CFO and channel corresponding to a single sensor.We found from (3) that at leastL + 2 consecutive nonzero pilotsymbols guarded byL zeros are sufficient. In this subsection,we consider multiple sensors, where distinct pairs of sensors andreceive-antenna elements have distinct channels and CFOs;i.e.,there areNs channels, andNs CFOs to be estimated per receive-antenna. In the following, we will show how relying on TDMA,we can design{pµ(n)}Ns
µ=1, n ∈ I for the µth sensor, so thatsignals from different sensors can be orthogonally separated atthe PU. Let us recall from (1) thatI was defined as the set ofindicesn ∈ [0, N − 1] := I.
To estimate{ω(ν,µ)o , h(ν,µ)}Ns
µ=1 on a per sensor basis,Ishould be orthogonally separated intoNs non-overlapping sub-sets, i.e.,{Iµ
p }Ns
µ=1 should obeyIµ1p ∩ Iµ2
p = Ø, ∀µ1 6= µ2.If a sequence of lengthNp is linearly convolved with a chan-
nel of lengthL + 1, the resulting sequence has lengthNp + L.This means thatL guard zeros should be appended toNp con-secutive non-zero pilots to avoid interference among sensors.Thus, time is divided in sensor-specific slots, with each slot con-taining Np + L symbol periods. This implies that the wholetraining block per sensor should have lengthN = Ns(Np + L).Now we can divide theNp + L slots per sensor into two sets:
Iµp :=[(Np + L)(µ − 1), (Np + L)(µ − 1) + Np − 1],
Iµp,o :=[(Np + L)(µ − 1) + Np, (Np + L)µ − 1],
whereIµp ∩ Iµ
p,o = Ø,∀µ, and the setsIµp andIµ
p,o representthe parts ofNp nonzero pilot symbols andL guard zeros corre-sponding to theµth sensor.

4 JOURNAL OF COMMUNICATIONS AND NETWORKS
Similar to (3), our pilot pattern can be chosen as:
pµ(n) =
{ √
Ep · ρn , n ∈ Iµp
0 , otherwise. (11)
The data in (1) can now be orthogonally separated intoNs setsof observations, each having the same structure as that for asin-gle sensor. For theµth sensor, we thus have
xν,µ(n) = ejω(ν,µ)o
nL
∑
l=0
h(ν,µ)(l)pµ(n − l) + ην(n)
=√
Ep · ejω(ν,µ)o
nρnL
∑
l=0
h(ν,µ)(l)ρ−l + ην(n),
(12)
wheren ∈ [(Np + L)(µ − 1), (Np + L)µ − 1].
By using the fact thatxν,µ(n+1) = ρejω(ν,µ)o xν,µ(n) in (12),
we can estimateω(ν,µ)o andh(ν,µ) for theµth sensor in theνth
antenna of the PU using (6) and (8) as follows:
ω(ν,µ)o =
tan−1
(Np+L)(µ−1)+Np−2∑
n=(Np+L)(µ−1)+L
=[xν,µ(n + 1)ρ∗x∗
ν,µ(n)]
/
(Np+L)(µ−1)+Np−2∑
n=(Np+L)(µ−1)+L
<[xν,µ(n + 1)ρ∗x∗
ν,µ(n)]
,
(13)
andh
(ν,µ)LS = (PHP)−1PHyν,µ, (14)
whereyν,µ := [yν,µ((Np + L)(µ− 1)), . . . , yν,µ((Np + L)µ−
1)]T with entryyν,µ(n) = exp(−jω(ν,µ)o n)xν,µ(n), andP has
the same structure as that of (8). Notice that we utilize max-imally the advantages of TDMA scheduling to estimate CFOsand channels.
C. Further Considerations
We have proposed CFO and channel estimators for wirelesssensor networks. Following remarks are pertinent to our CFOand channel estimators in (6) and (8):
1. The training patten for a single sensor consists ofNp con-secutive non-zero pilots, andL guard zeros. To guarantee iden-tifiability for any channel and any CFOω(ν,µ)
o ∈ [−π, π), oneneeds to collect at least(L + 1) blocks for distinctρ’s.
2. Our CFO estimator in (6) is reminiscent of the one in[9], where [9] employed two consecutive and identical trainingblocks with block lengthN for the single antenna system. How-ever, the acquisition range of our CFO estimator is[−π, π) forany channel of orderL, which is to be contrasted with [9] whoseacquisition range is limited to(1/N)[−π, π) and [11] whose ac-quisition range depends on the number of identical parts in ablock. The performance comparison regarding this issue will beshown in Example 1 and Example 4 of the Section VI.
3. The closed form estimator in (6) has lower complexity thanthe maximum likelihood estimator (MLE) in [10], which being
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0
0
0
p N
p N
p N L L L L
Sensor 1
Sensor 2
Sensor 3
Payload Training
1 p
2 p
3 p
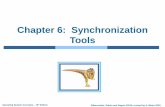
Fig. 2. Pilot pattern pµ with Ns = 3 sensors
nonlinear and statistical, requires many data blocks, and gridsearch.
4. For CFO and channel estimation,L + 2 non-zero pilots,equal to the number of unknowns (L + 1 channels and CFO),are only needed. This minimal training confirms band-widthefficiency.
5. Our algorithm can be easily applied to packet transmis-sions, where the pilot part is attached to the payload part. Thelatter may be quite long, andL guard zeros are required to de-couple it from the pilot part. In this case, CFO estimation usingtwo identical packets required by [9] can not be used, since theresulting CFO acquisition range shrinks considerably.
6. There is a tradeoff between estimation accuracy and band-width efficiency: if more pilots are used, the performance of(6)can be improved, at the expense of bandwidth-efficiency, whichwill be demonstrated in Example 4 of the Section VI.
Additional remarks for the multi-sensor case are now in order:
1. The number of pilot slots per sensor isN = (Np + L)Ns,whereNp ≥ L + 2. The pilot pattern is depicted in Fig. 2, to-gether with the payload part separated byL guard zeros. It fol-lows by inspection that the training sequences of multiple sen-sors are scheduled in a TDMA fashion.
2. The duty cycle for the pilot part is justNp/N , which im-plies that our scheme is energy efficient per sensor.
IV. APPLICATION TO MULTI-USER MULTI-CARRIERSYSTEMS
In the previous section, we proposed a training pattern for es-timating multiple CFOs and multiple channels in wireless sensornetworks where single-carrier transmissions were considered.Because orthogonal frequency division multiplexing (OFDM)has been widely adopted by many standards such as DAB, DVB,HyperLAN, IEEE 802.11a and IEEE 802.16a, we want to ap-ply our scheme to OFDM systems which exhibit sensitivity toCFO [20]. In this case, mobile users in an uplink orthogonalfrequency division multiplex access (OFDMA) system are con-sidered. In this section, we will show that the training pattern ofthe previous section can be also exploited to synchronize wire-less MIMO systems that employ multi-carrier transmissions.
Considering multi-carrier operation, we suppose that the totalnumber of subcarriers isN := Ns(Np + L), whereNp of themare used for data transmission, andL is the number of guard(virtual, or null) subcarriers per mobile user. Notice thatNs isthe number of mobile users. The received samples at theνth

OH et al.: COOPERATIVE SYNCHRONIZATION AND CHANNEL ESTIMATION 5
antenna in the base station are given by
xν(n) =
Ns∑
µ=1
ejω(ν,µ)o
nL
∑
l=0
h(ν,µ)(l)
N−1∑
k=0
uµ(k)ej2πk(n−l)/N
+ ην(n), n ∈ [0, N + L − 1],
(15)
where the firstL samples equal the lastL ones and thus consti-tute the cyclic prefix (CP), anduµ(k) is the pilot symbol trans-mitted on thekth subcarrier of theµth mobile user. What is dif-ferent in (15) relative to (1) is the transmission modality;i.e.,Ncarriers are used here. We note that the other parameters in (15)are the same with those in (1): the same models of the channeland CFO. The vector-matrix counterpart of (15) after discardingthe CP from (15) can be obtained as (see Appendix C):
yν =
Ns∑
µ=1
ejω(ν,µ)o
LDN (ω(ν,µ)o )H(ν,µ)FH
Nuµ + vν , (16)
where yν := [yν(0), . . . , yν(N − 1)]T , and uµ :=[uµ(0), . . . , uµ(N − 1)]T should be judiciously designed toexploit the advantages of simple estimators in the previ-ous section,H(ν,µ) is a circulant matrix with first column[h(ν,µ)(0), . . . , h(ν,µ)(L), 0, . . . , 0]T , and FN is an N -pointFFT matrix. The CFO matrix is defined asDN (ω
(ν,µ)o ) :=
diag[1, ejω(ν,µ)o , · · · , ejω(ν,µ)
o(N−1)]. We note that (16) is differ-
ent from that in [13], where we derived CFO and channel es-timators for MIMO-OFDM having common CFO between alltransmit and receive antennas. In contrast, CFOs between eachtransmit-receive link are allowed to be distinct here.
To estimate{ω(ν,µ)o }Ns
µ=1 and{h(ν,µ)}Ns
µ=1 in (16), we can usethe cooperative synchronization scheme in the previous section,for which {uµ}
Ns
µ=1should be cooperatively designed for each
mobile user. To further study this application and the perfor-mance of our estimator, we introduce the vector-matrix counter-part of (1) as:
xν =
Ns∑
µ=1
DN (ω(ν,µ)o )H(ν,µ)pµ + ην , (17)
where H(ν,µ) is an N × N Toepliz matrix having thefirst column [h(ν,µ)(0), . . . , h(ν,µ)(L), 0, . . . , 0]T , and pµ :=[pµ(0), . . . , pµ(N − 1)]T . Recall that our focus on determiningtraining symbols has been to find{pµ}
Ns
µ=1 so that estimators of
CFOω(ν,µ)o and channelh(ν,µ) for each sensor can be orthogo-
nally separated by TDMA.If we select training symbols asuµ := FNpµ in (16), where
pµ follows the training pattern in (11), then (16) reduces to
xν =
Ns∑
µ=1
ejω(ν,µ)o
LDN (ω(ν,µ)o )H(ν,µ)pµ + ην . (18)
We note that circulant and Toepliz matrices obey follow-ing property: H(ν,µ)Tzp = H(ν,µ)Tzp, where Tzp :=[IN−L 0(N−L)×L]T . In our training scheme, the lastL zerosin pµ allow H(ν,µ) to be replaced byH(ν,µ), which yields the
same structure as in (17). Now we can directly use our estima-tors in (13) to estimate multiple CFOs{ω(ν,µ)
o }Ns
µ=1 and channels
{h(ν,µ)}Ns
µ=1 from xν in (18) for these multi-carrier systems.
V. PERFORMANCE ANALYSIS
To benchmark the performance of our estimators, we de-rive the Cramer-Rao lower bound (CRLB) of CFO. Becauseour CFO estimators among sensors are independent, the single-sensor CRLB is considered. Now the system model in (17) be-comesx = DN (ωo)Hp + η, where we drop the sensor indices(ν, µ). In this case, we can derive the CRLB as follows:
CRLBωo=
(
1
σ2η
tr[
D(k)PRhPHD(k)
]
)−1
, (19)
whereD(k) := diag[0, 1, . . . , N − 1], Rh := E[hhH], andP is a Toeplitz matrix as in (8). We observe from (19) that asthe number of training symbolsNp (and thusN ) increases, theCRLB for CFO decreases.
For our estimator in (13), we consider the conditional meanand variance ofω(ν,µ)
o given ω(ν,µ)o , andβ(ν,µ)(n) :=
√
Ep ·
exp(jω(ν,µ)o n)ρn
∑Ll=0 h(ν,µ)(l)ρ−l for n = (Np+L)(µ−1)+
L, . . . , (Np + L)(µ − 1) + Np − 1. For small errors, we canapproximate the conditional mean and variance as follows:
E[ω(ν,µ)o − ω(ν,µ)
o |ω(ν,µ)o , {βν,µ(n)}
(Np+L)(µ−1)+Np−1
n=(Np+L)(µ−1)+L ] = 0,
(20)
and
Var[ω(ν,µ)o | ω(ν,µ)
o , {βν,µ(n)}(Np+L)(µ−1)+Np−1
n=(Np+L)(µ−1)+L ]
=1
(Np − L − 1) · SNR,
(21)
whereσ2ην
= No/2, and SNR:= (Ep/σ2ην
)∑L
l=0 |h(ν,µ)(l)|2.
We note from (20) that the CFO estimator is conditionallyunbiased for small errors, and from (21) the variance of the CFOestimator decreases as the number of training symbols and SNRincrease.
VI. SIMULATIONS
We conducted simulations to verify the performance of ourdesigns for wireless sensor networks. In all experiments, weconsidered an exponential channel model, for which taps areindependent complex Gaussian random variables with aver-age power profile that decays exponentially, and additive whiteGaussian noise with zero-mean and varianceσ2
ην. The informa-
tion symbols were drawn from a QPSK constellation.Example 1 (acquisition range of CFO estimator): To con-
firm the acquisition range of our CFO estimators, we comparedagainst the single sensor(Ns = 1) algorithm in [9] where themaximum likelihood estimator of the CFO was given based ontwo consecutive and identical training blocks. We note thatourCFO estimation can be done within a block as shown in (3).Figure 3 depicts “true CFO” versus “estimated CFO” when thechannel order isL = 3 and the block lengthN is 8 and 12. Theideal line, for which the estimated CFO exactly follows the true

6 JOURNAL OF COMMUNICATIONS AND NETWORKS
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
True CFO wo
Est
imat
ed C
FO
IdealProposedAlgorithm in [9] (N=12)Algorithm in [9] (N=8)
Fig. 3. CFO acquisition range comparison with channel order L = 3
0 5 10 15 20 25 3010
−6
10−5
10−4
10−3
10−2
10−1
100
NMSE of CFO
SNR
Ave
rage
NM
SE
for
CF
O
Ns=1Ns=2Ns=4CRB(Ns=1)
Fig. 4. Average normalized MSE for CFO
CFO, is also shown for comparison. We deduce from Fig. 3 thatour CFO estimator enjoys full acquisition range like ideal case,while the algorithm in [9] has the limited acquisition range, i.e.,the CFO estimator of [9] fails to estimate CFO in the out of itsacquisition range that is inversely proportional to the block sizeN . For example, if true CFO isωo = π, then our CFO estimatorcan give the estimated CFO, while [9] fails to estimate CFO, asshown in Fig. 3.
Example 2 (performance of CFO estimator): Fig. 4 showsaverage normalized mean square error (NMSE) ofωo for Ns =1, 2, 4, whereL = 3, and the CFOs are uniformly selectedin the range[−0.5π, 0.5π]. The number of pilot symbols pernode isNp = 4(L + 2), which is more than the minimum re-quired number of pilot symbolsL + 2. As a means of compari-son, we calculated the normalized mean square error (NMSE)of CFO defined as:E[‖ ωo − ωo ‖2]/ ‖ ωo ‖2, whereωo := [ω
(ν,1)o , . . . , ω
(ν,Ns)o ]T , and likewise forωo. The CRLB
we derived in Section V is also shown as a benchmark. Thanksto the TDMA-based cooperative scheduling, we infer that theperformance of our CFO estimators does not depend on the
0 5 10 15 20 25 3010
−3
10−2
10−1
100
101
NMSE of Channel
SNR
Cha
nnel
MM
SE
Ns=1Ns=2Ns=4Ideal(Ns=4)
Fig. 5. Average normalized MSE for channels
0 5 10 15 20 25 3010
−5
10−4
10−3
10−2
10−1
100
101
NMSE of CFO
SNR
Ave
rage
NM
SE
for
CF
O
# of pliots=1(L+2)# of pliots=3(L+2)# of pliots=5(L+2)
Fig. 6. Average normalized MSE of CFO for different number of pilots
number of sensors.Example 3 (performance of channel estimator): To test
the performance of multi-channel estimation, we usedNs =1, 2, 4, andL = 3, with the CFOs being randomly selected inthe range of[−0.5π, 0.5π]. Single sensor CFO estimators werecalculated first as in (5). Based on the estimated CFOs, Fig. 5shows channel estimation performance. To quantify channeles-timation performance, we computed the average channel NMSEasE[‖ h − h ‖2]/ ‖ h ‖2, whereh was obtained using theLS method. The ideal case assuming perfect CFO estimationis shown for a benchmark to isolate the performance of chan-nel estimation, which is also confirmed to be independent of thenumber of sensors.
Example 4 (tradeoff between performance and the numberof pilots): Although the minimum number of pilots for our CFOand channel estimator isL + 2, the use of large number of pi-lots gives better performance, which will be demonstrated here.The parameters used in this example are the same with thosein Example 2 and 3. Since we already checked that the perfor-mance is independent of the number of sensors, we test the case

OH et al.: COOPERATIVE SYNCHRONIZATION AND CHANNEL ESTIMATION 7
0 5 10 15 20 25 3010
−3
10−2
10−1
100
101
NMSE of Channel
SNR
Cha
nnel
NM
SE
# of pliots=1(L+2)# of pliots=3(L+2)# of pliots=5(L+2)Ideal(w/ known CFO)
Fig. 7. Average normalized channel MSE for different number of pilots
of Ns = 1 with N = 32 andL = 3. Figure 6 and 7 show theperformance of CFO and channel estimator, respectively, whenNp = 1(L + 2), 3(L + 2) and5(L + 2) are used. It is observedthat our estimator with larger number of pilots achieves betterperformance.
Example 5 (multi-carrier transmissions): To examine theperformance of CFO and channel estimator with multi-carriertransmissions, we compare our method with an existing methodin [11] for single antenna. For our algorithm, we useN =32 (i.e., the number of subcarriers), carrier frequency 5 GHz,OFDM symbol (without CP) period 3.2µs and signal band-width 10 MHz. To maintain the same transmission rate, the pilotlength of [11] is 32 with 4 identical parts, i.e., the block lengthis also32. In Figure 8, two cases are considered:ωo = π/10which is chosen within the acquisition range of the method in[11], andωo = π/4 which is out of the acquisition range. Ifthe CFO is chosen within the acquisition range of the methodin [11], our method has comparable performance with the onein [11]. For the case ofωo = π/4, we also observe from Fig.8 that our algorithm still enjoys performance comparable tothefirst case (ωo = π/10), while the method in [11] fails becauseits acquisition range isωo ∈ [−π/8, π/8]. Moreover, differ-ent from the method in [11], our method also considers channelestimation. Figure 9 shows the performance of the channel esti-mator. Although our channel estimator is not optimal for OFDMsystem, the proposed pilot design enables to estimate the CFOand channel together within one OFDM block.
VII. CONCLUSIONS
In this paper, we addressed synchronization and channel es-timation in the context of wireless sensor networks. Basedon judiciously designed pilot symbols, we separated CFO andchannel estimation per node. The low-complexity and lowduty-cycle features of our schemes make them attractive forpower-limited sensor network operation. In addition to energy-efficiency, our CFO estimator exhibits full acquisition range. Wealso showed that our CFO and channel estimators can be usedfor multi-user multi-carrier systems. Both analytical andsimu-
0 5 10 15 20 25 3010
−5
10−4
10−3
10−2
10−1
100
101
NMSE of CFO
SNR
Ave
rage
NM
SE
for
CF
O
Proposed (wo =π/10)
Morelli method (wo =π/10)
Proposed (wo =π/4)
Morelli method (wo =π/4)
Fig. 8. Average normalized CFO MSE for multi-carrier system (Ns = 1)
0 5 10 15 20 25 3010
−3
10−2
10−1
100
101
NMSE of Channel
SNR
Cha
nnel
MM
SE
proposepropose (w/ perfect CFO)
Fig. 9. Average normalized channel MSE for multi-carrier system (Ns =
1)
lation results confirmed improved estimation performance rela-tive to competing alternatives.
APPENDIX A: Cram er-Rao Lower Bound
We derive Cramer-Rao Lower Bounds (CRLB) to benchmarkour estimators. The input-output relationship for a single-sensoris given as:x = DN (ωo)Hp + η. Because convolution is acommutative operation, we deduce thatHp = Ph, whereP isa Toeplitz matrix having elements[P]i,j := p(i − j), 0 ≤ i ≤N − 1, 0 ≤ j ≤ L, which leads tox = DN (ωo)Ph + η.
The CRLB for the CFO estimator is defined as:
CRLBωo:=
(
E
[
∣
∣
∣
∣
∂lnp(x|ωo,h)
∂ωo
∣
∣
∣
∣
2])−1
, (22)
wherep(x|ωo,h) is the probability density function ofx condi-tioned onωo andh.

8 JOURNAL OF COMMUNICATIONS AND NETWORKS
For a given(ωo,h), the observation vectorx is Gaussian withmeanDN (ωo)Ph, and covariance matrixσ2
ηIN . Thus, the like-lihood for the parameters(h, ωo) takes the form
p(x|ωo,h) =
1
(2πσ2η)N
exp
{
−1
σ2η
[x − DN (ωo)Ph]H[x − DN (ωo)Ph]
}
.
For one observation block, the log-likelihood function is givenas:
lnp(x|ωo,h) =
N ln(2πσ2η) −
1
σ2η
[x − DN (ωo)Ph]H[x − DN (ωo)Ph].(23)
By differentiating lnp(x|ωo,h) as in (23) with respect toωo,we obtain that
∂lnp(x|ωo,h)
∂ωo= −
2
σ2η
=(
ηHD(k)DN (ωo)Ph)
, (24)
whereD(k) := diag[0, 1, . . . , N − 1]. Thus the Fisher informa-tion of CFO is given as
E
[
∣
∣
∣
∣
∂lnp(x|ωo,h)
∂ωo
∣
∣
∣
∣
2]
=1
σ2η
tr[
D(k)PRhPHD(k)
]
, (25)
whereRh := E[hhH]. As a result, the CRLB of CFO estimatoris given as the inverse of the Fisher information.
CRLBωo=
(
1
σ2η
tr[
D(k)PRhPHD(k)
]
)−1
. (26)
APPENDIX B: Proof of (20)and (21)
We derive an approximate closed form expression for theconditional mean and variance ofω(ν,µ)
o given ω(ν,µ)o and
βν,µ(n) :=√
Ep · exp(jω(ν,µ)o n)ρn
∑Ll=0 h(ν,µ)(l)ρ−l for n =
(Np +L)(µ−1)+L, . . . , (Np +L)(µ−1)+Np−1. To obtainthe tangent of the phase error in (13), we have
tan(ω(ν,µ)o − ω(ν,µ)
o ) =
Q+Np−2∑
n=Q+L
=[xν,µ(n + 1)ρ∗xν,µ(n)∗e−jω(ν,µ)o ]
/
Q+Np−2∑
n=Q+L
<[xν,µ(n + 1)ρ∗xν,µ(n)∗e−jω(ν,µ)o ]
.
(27)
whereQ := (Np + L)(µ − 1). As |ω(ν,µ)o − ω
(ν,µ)o | ¿ 1 holds
for high SNR, the tangent can be approximated as:
ω(ν,µ)o − ω(ν,µ)
o '
Q+Np−2∑
n=Q+L
= [G]
/
Q+Np−2∑
n=Q+L
< [G]
.
(28)
whereG := (ρβν,µ(n) + ην(n + 1)e−jω(ν,µ)o )(ρ∗β∗
ν,µ(n) +ρ∗η∗
ν(n)). At high SNR, (28) can be approximated by
ω(ν,µ)o − ω(ν,µ)
o '
Q+Np−2∑
n=Q+L
=(
ην(n + 1)β∗
ν,µ(n + 1) + |ρ|2η∗
ν(n)βν,µ(n))
/
Q+Np−2∑
n=Q+L
|ρ|2|βν,µ(n)|2
,
(29)
from which we can find that
E[ω(ν,µ)o − ω(ν,µ)
o | ω(ν,µ)o , {βν,µ(n)}
Q+Np−1n=Q+L ] = 0. (30)
The conditional variance of our estimate can be easily deter-mined by taking expectation of the square of (29) to result in
1
2E
Q+Np−2∑
n=Q+L
ην(n+1)β∗
ν,µ(n+1)+|ρ|2Q+Np−2
∑
n=Q+L
η∗
ν(n)βν,µ(n)
2
/ |ρ|4E
Q+Np−2∑
n=Q+L
|βν,µ(n)|2
2
.
(31)
Notice that we designed training symbols so that|ρ|2 = 1 andnoise varianceσ2
ην= No/2. Thus we can obtain from (31) that
1
4|ρ|4(1 + |ρ|4) ·
1
Et/No=
1
2·
1
Et/No, (32)
whereEt is the received total signal energy for an interval whereCFO estimation can be performed, which is defined as:
Et =
Q+Np−2∑
n=Q+L
E[
βν,µ(n)β∗
ν,µ(n)]
= (Np − L − 1) · Ep
L∑
l=0
|h(ν,µ)(l)|2.
(33)
Finally, we have
Var[ω(ν,µ)o | ω(ν,µ)
o , {βν,µ(n)}Q+Np−1n=Q+L ]=
1
(Np −L − 1)SNR,
(34)where SNR:= (Ep/σ2
ην)∑L
l=0 |h(ν,µ)(l)|2.
APPENDIX C: Derivation of (16) from (15)
Let us consider a vectoruµ := [uµ(0), . . . , uµ(N−1)]T withlengthN , for theµth mobile user. In OFDM system, we im-plementN -point inverse FFT (via left multiplication withFH
N )on each blockuµ and insert the cyclic prefix (via left multipli-cation with the matrix operatorT cp := [IT
L×N ITN ]T , where
IL×N denotes the lastL columns ofIN ). After parallel to se-rial (P/S) conversion, the resulting blocks{uµ := T cpF
TNuµ}

OH et al.: COOPERATIVE SYNCHRONIZATION AND CHANNEL ESTIMATION 9
of sizeP × 1 are transmitted through frequency selective chan-nel, whereP = N + L.
The received samples at theνth antenna in the base stationare given by (15). The sequencexν(n) is then serial to par-allel (S/P) converted intoP × 1 blocks with entriesxν :=[xν(0), . . . , xν(P − 1)]T . Then, we discard the cyclic prefixof length L by left multiplying xν with the matrixRcp :=[0N×L IN ]. Denoting the resulting block asyν := Rcpxν ,we obtain the following vector-matrix input-output relationship:
yν =
Ns∑
µ=1
RcpDP (ω(ν,µ)o )H(ν,µ)T cpF
H
Nuµ + Rcpην , (35)
ν ∈ [1, Ns], whereην := [ην(0), ην(1), . . . , ην(P −1)]T , withP = N + L; H(ν,µ) is a P × P lower triangular Toeplitzmatrix with first column[h(ν,µ)(0), . . . , h(ν,µ)(L), 0, . . . , 0]T ;andDP (ω
(ν,µ)o ) is a diagonal matrix defined asDP (ω
(ν,µ)o ) :=
diag[1, ejω(ν,µ)o , . . . , ejω(ν,µ)
o(P−1)].
Based on the structure of the matrices involved, it can be read-ily verified thatRcpDP (ω
(ν,µ)o ) = ejω(ν,µ)
oLDN (ω
(ν,µ)o )Rcp,
whereDN (ω(ν,µ)o ) := diag[1, ejω(ν,µ)
o , . . . , ejω(ν,µ)o
(N−1)]. Fol-
lowing this identity, let us defineH(ν,µ)
:= RcpH(ν,µ)T cp,
where theN × N matrix H(ν,µ)
is circulant with first col-umn [h(ν,µ)(0), . . . , h(ν,µ)(L), 0, . . . , 0]T . Letting alsovν :=Rcpην , we can re-write (35) as:
yν =
Ns∑
µ=1
ejω(ν,µ)o
LDN (ω(ν,µ)o )H
(ν,µ)FH
Nuµ + vν , (36)
which turns out to be (16).In the absence of CFO (ω
(ν,µ)o = 0), taking the FFT ofyν
gives the frequency-selective channel equivalent to a set of flat-fading subchannels, i.e., the conventional MIMO-OFDM sys-tem [13]
y := F Nyν =
Ns∑
µ=1
DN (h(ν,µ)
)uµ + F Nuν , (37)
where we use the fact thatF NH(ν,µ)
FH
N is a diagonal matrix
DN (h(ν,µ)
), for whichh(ν,µ)
:= [h(ν,µ)(0), . . . , h(ν,µ)(2π(N−1)/N)]T with h(ν,µ)(2πn/N) denoting the(ν, µ)th channel’sfrequency-response value on thenth FFT grid, which is givenby h(ν,µ)(2πn/N) :=
∑Ll=0 h(ν,µ)(l) exp(−j2πln/N).
ACKNOWLEDGEMENT
This work was supported in part by the Ministry of informa-tion & Communications, Korea, under the Information Technol-ogy Research Center (ITRC) Support Program.
REFERENCES[1] G. H. Golub and C. F. van Loan,Matrix Computations, 3rd ed. Baltimore,
MD: Johns Hopkins Univ. Press, 1996
[2] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, E. Cayirci, “A survey onsensor networks,”IEEE Communications Magazine, vol. 40, pp. 102-114,Aug. 2002.
[3] G. J. Foschini and M. J. Gans, “On limits of wireless communication ina fading environment when using multiple antennas,”W ireless PersonalCommunications, vol. 6, no. 3, pp. 311-335, Mar. 1998.
[4] D. N. Jayasimha, S. S. Iyengar, and R. L. Kashyap, “Information Integra-tion and Synchronization in distributed sensor networks,”IEEE Trans. onSystems, Man and Cybernetics, vol. 21, pp. 1032-1043, Sep./Oct. 1991.
[5] Y. D. Kim, J. K. Lim, C. H. Shu, E. R. Jung and Y. H. Lee, “Carrier fre-quency estimation for transmissions with antenna diversity,” Proc. of Intl.Conf. on Vehicular Technology, vol. 3, pp. 1569 -1573, 2002.
[6] J. N. Laneman and G. W. Wornell, “Distributed space-time coded protocolsfor exploiting cooperative diversity in wireless networks,” IEEE Trans. onInformation Theory, vol. 49, pp. 2415-2425, Oct. 2003.
[7] X. Ma, C. Tepedelenlioglu, G. B. Giannakis and S. Barbarossa, “Non-data-aided carrier offset estimation for OFDM with null subcarriers: Identifiabil-ity, Algorithms, and Performance,”IEEE Trans. on Commun., vol. 19, no.12, pp. 2504-2515, Dec. 2001.
[8] X. Ma, L. Yang and G. B. Giannakis, “Optimal training for MIMOfrequency-selective fading channels,”IEEE Trans. on Wireless Commun.,vol. 4, pp. 453-466, Mar. 2005.
[9] P. H. Moose, “A technique for orthogonal frequency division multiplexingfrequency offset correction,”IEEE Trans. on Commun., vol. 42, pp. 2908-1314, Oct. 1994.
[10] M. Morelli and U. Mengali, “Carrier-frequency estimation for transmis-sions over selective channels,”IEEE Trans. on Commun., vol. 48, no. 9 pp.1580-1589, Sep. 2000.
[11] M. Morelli and U. Mengali, “An improved frequency offsetestimator forOFDM applicatins,”IEEE Communications Letters, vol. 3, no. 3, pp. 75-77,Mar. 1999.
[12] R. Negi and J. Cioffi, “Pilot tone selection for channel estimation in amobile OFDM system,”IEEE Trans. on Consumer Electronics, vol. 44, no.3, pp. 1122-1128, Aug. 1998.
[13] X. Ma, M.-K. Oh, G. B. Giannakis, and D.-J. Park, “Hopping pilots for es-timation of frequency-offset and multiantenna channels in MIMO-OFDM,”IEEE Trans. on Commun., vol. 53, no. 1, pp. 162-172, Jan. 2005.
[14] J. G. Proakis,Digital communications, McGraw-Hill, 4th edition, 2000.
[15] Q. Sun, D. C. Cox and H. C. Huang, “Estimation of continuous flat fadingMIMO channel,”IEEE Trans. on Wireless Commun., vol. 1, no. 4, pp. 549-553, Oct. 2002.
[16] M. L. Sichitiu and C. Veerarittiphan, “Simple, accuratetime synchroniza-tion for wireless sensor networks,”Proc. of IEEE Wireless Communicationsand Networking, vol. 2, pp. 1266-1273, March 2003.
[17] Z. Wang and G. B. Giannakis, “Wireless multicarrier communications:Where Fourier meets Shannon,”IEEE Signal Processing Magazine, vol.47, pp. 29-48, May 2000.
[18] K. Yao, R. E. Hudson, C. W. Reed and D. Chen, “Blind beamformingon a randomly distributed sensor array system,”IEEE Selected Areas inCommun., vol. 16, pp. 1555-1567, Oct. 1998.
[19] J. Kivinen, T. O. Korhonen, P. Aikio, R. Gruber, P. Vainikainen, and S.G.Haggman, “Wideband radio channel measurement system at 2GHz,”IEEETrans. on Instrumentation and Measurement, vol. 48, issue 1, pp. 39-44,Feb. 1999.
[20] T. Pollet, M. Van Bladel, and M. Moenecley, “BER sensitivity of OFDMsystems to carrier frequency offset and Wiener phase noise,”IEEE Trans.on Commun., vol. 43, no. 234, pp. 191-193, Feb./Mar./Apr. 1995.
[21] E. H. Callaway,Wireless sensor networks - architectures and protocols,Auerbach, 2004.
[22] G. J. Foschini, “Layered space-time architecture for wireless communica-tion in a fading environment when using multi-element antenna,” Bell Labs.Tech. J., vol. 1, pp. 41-59, 1996.
[23] V. Tarokh, H. Jafarkhami, and A. R. CalderBank, “Space-time block codesfrom orthogonal designs,”IEEE Trans. on Infor. Theory, vol. 45, pp. 1456-1467, July 1999.

10 JOURNAL OF COMMUNICATIONS AND NETWORKS
MI-KYUNG OH received B.S. degree from the De-partment of Electrical Engineering, Chung-ang Uni-versity, Korea in 2000 and M.S. degree in Electri-cal Engineering from the Korea Advanced Instituteof Science and Technology (KAIST), Korea in 2002.From September 2002 to February 2004, she was avisiting researcher in the Department of Electrical andComputer Engineering at the University of Minnesota.She is currently Ph.D. candidate of the Departmentof Electrical Engineering and Computer Science inKAIST. Her research interests include channel estima-
tion, synchronization, wireless networks, and channel coding.
XIAOLI MA received the B.S. degree in automaticcontrol from Tsinghua University, Beijing, P.R. China,in 1998 and the M.Sc. and Ph.D. degrees in electri-cal engineering from the University of Virginia, Char-lottesville, VA, in 1999 and the University of Min-nesota, Minneapolis, MN, in 2003, respectively. SinceAug. 2003, she has been an assistant professor withthe Department of Electrical and Computer Engineer-ing, Auburn University. Her research interests includetransmitter and receiver diversity techniques for wire-less fading channels, communications over time- and
frequency selective channels, complex-field and space-time coding, channelestimation and equalization algorithms, carrier frequency synchronization forOFDM systems, and wireless sensor networks.
GEORGIOS. B. GIANNAKIS received his Diplomain Electrical Engineering from the National TechnicalUniversity of Athens, Greece, 1981. From Septem-ber 1982 to July 1986 he was with the Universityof Southern California (USC), where he received hisMSc. in Electrical Engineering, 1983, MSc. in Math-ematics, 1986, and Ph.D. in Electrical Engineering,1986. After lecturing for one year at USC, he joinedthe University of Virginia in 1987, where he becamea professor of Electrical Engineering in 1997. Since1999 he has been a professor with the Department of
Electrical and Computer Engineering at the University of Minnesota, where henow holds an ADC Chair in Wireless Telecommunications.
His general interests span the areas of communications and signal processing,estimation and detection theory, time-series analysis, and system identification– subjects on which he has published more than 200 journal papers, 350 confer-ence papers and two edited books. Current research focuses on transmitter andreceiver diversity techniques for single- and multi-user fading communicationchannels, complex-field and space-time coding, multicarrier,ultra-wide bandwireless communication systems, cross-layer designs and sensor networks.
G. B. Giannakis is the (co-) recipient of six paper awards from the IEEE Sig-nal Processing (SP) and Communications Societies (1992, 1998, 2000, 2001,2003, 2004). He also received the SP Society’s Technical Achievement Awardin 2000. He served as Editor in Chief for theIEEE SP Letters, as AssociateEditor for theIEEE Trans. on Signal Proc. and theIEEE SP Letters, as secre-tary of the SP Conference Board, as member of the SP Publications Board, asmember and vice-chair of the Statistical Signal and Array Processing TechnicalCommittee, as chair of the SP for Communications Technical Committee andas a member of the IEEE Fellows Election Committee. He has also served as amember of the IEEE-SP Society’s Board of Governors, the Editorial Board fortheProceedings of the IEEE and the steering committee of theIEEE Trans. onWireless Communications.
DONG-JO PARK received B.S. degree from the De-partment of Electrical Engineering, Seoul NationalUniversity, Korea in 1976 and M.S. and Ph.D. degreesin Electrical Engineering from the University of Cali-fornia, Los Angeles, U.S.A. in 1981 and 1984, respec-tively. He was a senior researcher of Electronics andTelecommunications Research Institute (ETRI), Dae-jeon, Korea, from 1984 to 1985. He is currently pro-fessor in the Department of Electronic and ComputerScience in Korea Advanced Institute of Science andTechnology (KAIST), Daejeon, Korea. His research
interests include multi-input multi-output systems, OFDM, multi-media signalprocessing, ultra-wide band communications, and channel coding. He is a mem-ber of IEEE, IEICE, KIEE, KICS, and KISS.