Commentary: Development of Perception-Action Systems and General Principles of Pattern Formation
17
Commentary Commentary: Development of Perception-Action Systems and General Principles of Pattern Formation M. T. Turvey Center for the Ecological Study of Perception and Action, University of Connecticut, and Haskins Laboratories, New Haven, CT Paula Fitzpatriek Center for the Ecological Study of Perception and Action, University of Connecticut TURVEY, M. T., and FITZPATRICK, PAULA. Commentary: Development of Perception-Action Sys- tems and General Principles of Pattern Formation. CHILD DEVELOPMENT, 1993, 64, 1175-1190. Our commentary on this special issue devoted to Developmental Biodynamics: Brain, Body, and Behavior Connections is divided into 3 main sections. The first section is an overview of the individual contributions. 5 major themes are identified: (1) inappropriateness of computational treatments of development and the need for more biologically and physically relevant treatments; (2) significance of tailoring muscular to nonmuscular forces in developing movement coordina- tion; (3) importance of spontaneous movements as exploratory and formative mechanisms; (4) influences of action capabilities on the development of perception capabilities, and vice versa; (5) applications of methods and techniques of nonlinear dynamics to developmental processes. In the second section, we provide a synopsis of current ways of thinking about prototypical developmental processes, namely, pattern formation and pattern differentiation, in various classes of physical and biological systems. It is suggested that efforts to understand the progres- sive formation and differentiation of patterns in terms of very general principles provide a valu- able resource of concepts and methods for students of child development. In the third section, hypotheses about the development of perception-action systems are generated from juxtaposing the themes and conjectures of this special issue with general principles of pattern formation. The hypotheses suggest the possibility of a pattern formation or dynamics approach to child development as an alternative to the conventional approaches emphasizing maturation (nativist), specific learning experiences (empiricist), cognitive stages (Piagetian), and strategics of encoding and retrieval (information processing). The articles reported in this special sec- mentary, we present first an overview of the tion are directed at the development of papers, highlighting their major themes. We locomotion and reaching and at the inter- then provide a synopsis of contemporary dependencies of perceptual and motor de- theories about the progressive formation and velopment. They are not written from a differentiation of patterns in physical and bi- common perspective, but they do share an ological systems as foundational to an under- inclination to open up the repertoire of con- standing of how perception-action systems cepts and methods by which the develop- develop. Finally, we extract from the articles ment of action and perception capabilities in an inventory of ideas that are suggestive of children might be addressed. In our com- more general principles of dynamic pattern The writing of this manuscript was supported by NSF grants BNS 90-11013 and BNS 91- 09880 awarded to M. T. Turvey, NSF predoctoral fellowship awarded to Paula Fitzpatrick, and NICHD grant HD-01004 awarded to the Haskins Laboratories. The authors wish to thank Clau- dia Carello and Richard Schmidt for their technical and conceptual contributions. Please send reprint requests to M. T. Turvey, Center for the Ecological Study of Perception and Action, U-20, University of Connecticut, Storrs, CT 06269. [ Child Development, 1993, 64,1175-1190. © 1993 by the SocietyforResearch in Child Development, Inc. All rights reserved. 0009-3920/93/6404-0023$01.00]
-
Upload
assumption -
Category
Documents
-
view
1 -
download
0
Transcript of Commentary: Development of Perception-Action Systems and General Principles of Pattern Formation

Commentary
Commentary: Development ofPerception-Action Systems and GeneralPrinciples of Pattern Formation
M. T. TurveyCenter for the Ecological Study of Perception and Action, University of
Connecticut, and Haskins Laboratories, New Haven, CT
Paula FitzpatriekCenter for the Ecological Study of Perception and Action, University of
Connecticut
TURVEY, M. T., and FITZPATRICK, PAULA. Commentary: Development of Perception-Action Sys-tems and General Principles of Pattern Formation. CHILD DEVELOPMENT, 1993, 64, 1175-1190.Our commentary on this special issue devoted to Developmental Biodynamics: Brain, Body, andBehavior Connections is divided into 3 main sections. The first section is an overview of theindividual contributions. 5 major themes are identified: (1) inappropriateness of computationaltreatments of development and the need for more biologically and physically relevant treatments;(2) significance of tailoring muscular to nonmuscular forces in developing movement coordina-tion; (3) importance of spontaneous movements as exploratory and formative mechanisms;(4) influences of action capabilities on the development of perception capabilities, and vice versa;(5) applications of methods and techniques of nonlinear dynamics to developmental processes.In the second section, we provide a synopsis of current ways of thinking about prototypicaldevelopmental processes, namely, pattern formation and pattern differentiation, in variousclasses of physical and biological systems. It is suggested that efforts to understand the progres-sive formation and differentiation of patterns in terms of very general principles provide a valu-able resource of concepts and methods for students of child development. In the third section,hypotheses about the development of perception-action systems are generated from juxtaposingthe themes and conjectures of this special issue with general principles of pattern formation.The hypotheses suggest the possibility of a pattern formation or dynamics approach to childdevelopment as an alternative to the conventional approaches emphasizing maturation (nativist),specific learning experiences (empiricist), cognitive stages (Piagetian), and strategics of encodingand retrieval (information processing).
The articles reported in this special sec- mentary, we present first an overview of thetion are directed at the development of papers, highlighting their major themes. Welocomotion and reaching and at the inter- then provide a synopsis of contemporarydependencies of perceptual and motor de- theories about the progressive formation andvelopment. They are not written from a differentiation of patterns in physical and bi-common perspective, but they do share an ological systems as foundational to an under-inclination to open up the repertoire of con- standing of how perception-action systemscepts and methods by which the develop- develop. Finally, we extract from the articlesment of action and perception capabilities in an inventory of ideas that are suggestive ofchildren might be addressed. In our com- more general principles of dynamic pattern
The writing of this manuscript was supported by NSF grants BNS 90-11013 and BNS 91-09880 awarded to M. T. Turvey, NSF predoctoral fellowship awarded to Paula Fitzpatrick, andNICHD grant HD-01004 awarded to the Haskins Laboratories. The authors wish to thank Clau-dia Carello and Richard Schmidt for their technical and conceptual contributions. Please sendreprint requests to M. T. Turvey, Center for the Ecological Study of Perception and Action, U-20,University of Connecticut, Storrs, CT 06269.
[ Child Development, 1993, 64,1175-1190. © 1993 by the Society for Research in Child Development, Inc.All rights reserved. 0009-3920/93/6404-0023$01.00]

1176 Child Development
formation and that could provide an impor-tant departure point for future research onperception-action development in children.
Overview
Theme 1: Inappropriateness ofComputational Treatments ofDevelopment and the Need for MoreBiologically and Physically RelevantTreatments
Sporns and Edelman (1993, in this is-sue) offer the most explicit criticism of infor-mation-processing explanations (and theirclose kin, neural network models) that at-tempt to explain motor development interms of control mechanisms and feedbackloops. In particular, they point out that infor-mation-processing theories do not provideadequate explanations for motor redundancyand variability, cannot explain complemen-tary changes in brain structure and body me-chanics, and have only marginal biologicalrelevance. Sporns and Edelman suggest thatthe major challenge for developing motorcontrol is solving Bernstein's (1967) prob-lem, that is, learning how to convert a high-dimensional system of very many (redun-dant) degrees of freedom into a controllablesystem by forming synergies. In their paper,Sporns and Edelman offer an account of syn-ergy formation based on selectional princi-ples. Their bottom line is that synapticchanges are the consequence of both envi-ronmental and internal constraints and re-sult in the selection of optimal neuronalgroups (which are tantamount to synergies).The investigations and hypotheses ofMyklebust and Gottlieb (1993, in this issue)seem to be consonant with such a view. Theelementary stretch reflex is more diffuse ininfants, suggesting the influence of multipleconnections involving several spinal levels.With development, the spinal circuitry un-derlying this basic mechanism—responsiblefor detecting and adjusting to externally in-duced changes in muscle force—appears tobecome more focused, confining the ele-mentary pattern to the adaptive form of re-ciprocal inhibition.
Thelen, Corbetta, Kamm, and Spencer(1993, in this issue) reject the traditionalcomputational account of the developmentof reaching (namely, that the matching ofseen object and felt hand builds a reachingschema). They suggest, instead, that inlearning to reach, infants discover how tomodulate their spontaneous movements inorder to achieve a goal (i.e., to reach andgrasp a desired object). In particular. Infantslearn to modulate arm stiffness and force.
Similarly, Clark and Phillips (1993, in thisissue) reject traditional maturational ac-counts of the development of walking andsuggest instead that the developmentalcourse of learning to walk is one in whichthe infant is first attracted to an unstable andweak dynamic solution (i.e., limit cycle) andthen learns to stabilize the regime throughexperience.
Theme 2: Significance of TailoringMuscular to Nonmuscular Forces inDeveloping Movement Coordination
There is a definite recognition of the im-portance of "Bernsteinian " concepts and anattempt to demonstrate empirical support forthe same. Bernstein's (1967) insight that thedegrees of freedom of a motor system can bereduced by forming synergies is embracedby many of the authors in this special section(as suggested above). Furthermore, two pa-pers attempt to provide empirical evidenceto support Bernstein's insight that an impor-tant component of motor learning and devel-opment is discovering how to use reactiveforces effectively in executing a movement.For example, Zernicke and Schneider (1993,in this issue) demonstrate that in both adultsexecuting a complex motor learning taskand infants learning to reach, becomingmore skilled entails learning optimal muscletorque patterns to counterbalance motion-dependent torques. Similarly, Thelen et al.demonstrate how torque patterns change infour infants learning to reach.
Theme 3: Importance of SpontaneousMovements as Exploratory and FormativeMechanisms
Several of the authors in the issue con-tend that (o) spontaneous movements arenot merely random but are organized, and(b) spontaneous movements are importantfor perceptuomotor development. That is,motor development is a process of learn-ing to control and sculpt undirected, spon-taneous movements into controlled, goal-directed movements. To support this claim,the patterning and structure of spontaneousmovements are empirically evaluated. Forexample, Robertson (1993) investigated thepersistence and structure of cyclic motor ac-tivity (overall body movement) beyond theneonatal period. He found that cyclic motoractivity does persist in active sleep and re-mains irregular across the 4 months studied.Motor activity during awake states, however,increased in temporal complexity at about 2months, suggesting that more complex dy-namics are "shaping" the spontaiieous ac-tivity. Hofsten and Ronnqvist (1993, in thisissue) examined the spontaneous arm

Turvey and Fitzpatrick 1177
movements of young infants (3—5 days atoutset) to see whether the structure of thesemovements is similar to reaching move-ments. They report that spontaneous armmovements exhibit temporal and spatial pat-terning similar to that found in reachingmovements at 5 months. Also, Thelen et al.demonstrate how initial preferred modes ofmovement (with their own intrinsic dynam-ics) are modulated in the development ofreaching.
Theme 4: Influences of Action Capabilitieson the Development of PerceptionCapabilities, and Vice Versa
Bushnell and Boudreau (1993, in this is-sue) propose that the emergence of certainmotor abilities may play a role in determin-ing the developmental sequence of certainperceptual abilities. That is, proficiency incertain motor activities may be necessary forrevealing information that is necessary forperception. They present two examples, onefrom haptic perception and one from depthperception, to support their claim. Clifton,Muir, Ashmead, and Clarkson (1993, in thisissue) demonstrate that muscle-joint pro-prioception can be used in guiding earlyreaching movements. Traditional theoryholds that early reaching depends on con-tinual visual monitoring and matching ofhand and target. Clifton et al. demonstrate,however, that infants are able to reach suc-cessfully for objects in the dark, with onlymuscular proprioceptive hand-location in-formation available. Similarly, Ashmead,McCarty, Lucas, and Belvedere (1993, inthis issue) investigate the role of visual guid-ance of reaching in a task in which the targetchanges location during the reach. They re-port that at 9 months infants are able to ad-just their reaches, but only when their handis visible. Further, reaching adjustmentswere made predominantly in the second halfof the reach segment. Five-month-old in-fants were not able to adjust their reaches,with performance comparable on trials inwhich the hand was and was not visible.
These results suggest that visual guid-ance of reaching is critical in older infants inchallenging reaching tasks. Taken together,the results of the Clifton et al. and Ashmeadet al. studies suggest that the role of visualguidance in the development of reachinghas most likely been misconstrued. That is,(a) visual guidance is not necessary foryoung infants just learning to reach (nonvi-sual proprioception is good enough), and(b) visual guidance appears to play a morecrucial role in adjusting reaches for older in-fants. Thus, visual guidance/adjustments
seem to emerge after reaching appears, sug-gesting that an alternative to hand-targetmatching is needed. (Both Clifton et al. andAshmead et al. interpret their results interms of traditional hand-target matchingtheory.)
Adolph, Eppler, and Gibson (1993, inthis issue) examine crawlers' and toddlers'ability to perceive geographical slant. Spe-cifically, they explore the abilities of crawl-ers and walkers to perceive whether slop-ing surfaces afford safe traversal. Resultsindicate that walkers are able to perceiveaffordances for locomoting over slopingsurfaces. Walkers were more cautiousdescending slopes than ascending, oftenshifting from walking to sliding during de-scent. Crawlers were relatively inept at per-ceiving the controlled locomotion permittedor not by a slope, attempting to go up anddown most slopes, and often falling. The au-thors conclude that between 8 and 14months infants learn a good deal about af-fordances for locomotion. Results from thecrawlers are interpreted in terms of sensitiv-ity to a continuous optical gradient speci-fying a continuous surface.
Theme 5: Applications of Methods andTechniques of Nonlinear Dynamics toDevelopmental Processes
It seems that a major aim of this specialsection was to demonstrate how the con-cepts and tools of dynamics can be appliedto studying perceptuomotor development.Goldfield, Kay, and Warren (1993, in thisissue) examined a relatively simple task,namely, bouncing in a jolly jumper. Thistask was chosen because Goldfield et al. hada specific model (and predictions) they couldtest. In particular, they modeled bouncingas a forced mass-spring, with muscle andjoint stiffness and damping, as well as intrin-sic timing. Such a mass-spring system hastwo important characteristics: (a) a resonantfrequency, and (fo) a maximum amplitudeachieved by matching leg and spring stiff-ness. Their results indicate that in learningto bounce infants assemble and tune a forcedmass-spring system oscillating at its resonantfrequency. Their conclusions are supportedby the data, and they suggest further manip-ulations of the system in order to gain moreempirical support for the model.
In the papers by Thelen et al. (1993, inthis issue) and Clark and jPhillips (1993, inthis issue), the authors advance dynamicaltreatments of their data on reaching andwalking, respectively. The Thelen et al. pa-per is mainly descriptive, comparing the

1178 ChildDevelopment
forms of limb trajectories to show how limbstiffness and torque profiles might be chang-ing developmentally. A dynamical interpre-tation is presented of the data, suggestingthat it provides evidence of limit cycle dy-namics that evolve into point attractors aswell as implicating mass-spring dynamics.This interpretation would be enhanced sig-nificantly by a model of reaching as a time-evolving functional organization and by ex-perimental manipulations directly suited totesting the claims for limit cycles and pointattractors. As of now, both of the precedingrequirements are difficult to come by. Simi-larly, the interesting and provocative dy-namical claims in the Clark and Phillips arti-cle are in need of more detailed and rigoroussupport. The main points of the article arethat (a) inspection of phase portraits sug-gests that even young walkers exploit limit-cycle dynamics, and (b) the pattern ofrelative phasing changes developmentally.Acceptance of these claims would be en-hanced by a model of (b) and by systematicanalyses of dependent measures directly rel-evant to testing them.
An additional and important applicationof ideas from nonlinear dynamics is to befound in the article of Robertson (1993, inthis issue). The spontaneous cyclic motor ac-tivity (CM) exhibited by an infant is highlyirregular and looks like noise. It could, how-ever, be due in part to an underlying systemthat is deterministic—that is, there is adefinite dynamic that is producing the irreg-ular pattern. The problem is that we cannotguess the system's relevant observables ordegrees of freedom. An important theoremof nonlinear dynamics reveals that, on thebasis of any one quantity associated with thephenomenon, and a time series of it, it ispossible to create "fake observables" thatpermit a reconstruction of the underlyingdynamic despite one's ignorance of the typeand number of its degrees of freedom. Rob-ertson's application of this strategy to iden-tify structure in CM bodes well for futureefforts to understand the spontaneous andill-defined activities that seem to be precur-sors to coordinated behavior.
General Concepts of PatternFormation
The progressive formation and differen-tiation of patterns in physical and biologi-cal systems is a topic of great contemporaryconcern. In large part this is because ofthe increasing availability of physical and
mathematical tools for examining and un-derstanding morphogenesis or the "form-ing of matter." Although the insights gainedto date are impressive relative to intuitionsof a generation ago, the general theory ofpattern formation in dynamical systems isvery much in its infancy. The time-evolutionof patterns (spatial, temporal, spatiotempo-ral) is most adequately addressed by con-temporary methods when the process inquestion is representable as a single dy-namical system with a single control. For thepattern-formation processes encounteredcommonly in biology and psychology, acontinuum of spatially coupled dynamicalsystems is imaginable together with a con-tinuum of controls (Abraham, 1987). Elabo-ration and formulation of the generic behav-ior of such systems lies in the future, with apromise of rich metaphors and models forthe developmental processes of concern tothe biologist and psycbologist.
In the following we provide brief sum-maries of current ways of thinking about pat-tern formation and differentiation—that is,prototypical developmental processes—invarious classes of systems. Our main goal isto provide a context for the articles of thisspecial section through a survey of the kindsof concepts, both established and under ex-ploration, that bear on development as avery general feature of nature. Our suspi-cion, and our hope, is that this survey willbe illuminating, especially in respect to pro-viding insight into the relevant observables.A system's relevant observables or degreesof freedom are the ways in which it mightchange. Although it is the case that observ-ables of any number and kind can be chosento describe a system, the right observableslead to experiments that are more straight-forward (elegant) and to interpretations thatare both easier to express and more profound(Krieger, 1992).
Pattern formation in physical sys-tems.—In a nutshell, a specific emergentform is a solution to a generalized stabilityproblem (Haken, 1977, 1983, 1988; Iberall& Soodak, 1987). There is a fluctuation-dissipation principle that varies according tothe scale and kinds of subsystems involved.Small fluctuations generated at lower levelsof organization may be rapidly dissipated(damped out), or they may be amplified andstabilized within a higher-ordered organiza-tion. Thus, the appearance of new forms orpatterns is a stability transition—changes offorces and scales make the existing patternsor forms unstable.

Turvey and Fitzpatrick 1179
From what level, micro or macro, doesthe instability arise? Physical systems arereadily expressed as alternations of atomistic(i.e., atom-like) and continuum levels. Forany given system, there is a spatial-temporalscale of analysis at which it behaves as a con-tinuum, that is, as a coherent, field-like, mac-roscopic structure. At a finer scale of analy-sis, however, the continuum is revealed as acollection of interacting and fluctuating at-omisms (e.g., the molecules of a fluid). Thepattern-generating capability of a physicalsystem lies in the interplay between the pro-cesses characterizing the two levels. Withrespect to the source of instability inducingpattern formation, it is generally a demandat the continuum scale that impresses itselfupon the atomisms as impositions on theirinteractions. The simplest example is pro-vided by pressure-driven fluid flow in apipe. Increasing pressure amounts to a scal-ing up of the energy swept into the fluid sys-tem at the continuum level. Unpatterned orlaminar flow becomes unstable, that is, thefluctuations amplify, as the convective con-tinuum flow outstrips the ability of the atom-istic level to dissipate the injected energythrough diffusion. The homogeneous field isfractured by symmetry-breaking into newand large collective behaviors of many mole-cules. Laminar flow gives way to vortices,that is, flow characterized by local regions ofspiral-like patterns.
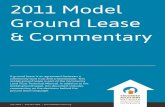
Particularly rich examples of pattern for-mation in fluid flows are the Rayleigh-Benard and Couette-Taylor instability se-quences (see, e.g., Abraham fie Shaw, 1988;Nicholis, 1990). Coordinate with critical(bifurcation) values of a nonequilibriumconstraint—an increasing temperature gra-dient in the Rayleigh-B6nard case and an in-creasing velocity gradient in the Taylorcase—one observes a hierarchy of stabilitytransitions yielding quantized spatial andspatiotemporal patterns of increasing com-plexity, each with some degree of autonomy(i.e., relative indifference to changes in theboundary conditions that forged them). Theforms created in the Couette-Taylor device,a stirring machine, are shown in Figure 1.The device consists of two concentric cylin-ders mounted on a common vertical axis,with a fluid contained between the two cyl-inders. To stir the fluid, the inner cylindercan be rotated at various speeds. Increasingthe speed results in a succession of patterns.Importantly, these patterns are not presentbeforehand in the atomistic level, and theirdetails are not prescribed by the "control
FIG. 1.—A schematic of the successive pat-terns induced in the Couette-Taylor stirring ma-chine a.s a function of increase in the velocity dif-ference (the control parameter) between the innerand outer cylinders housing the fluid. Top left.With a .stirring rate just above zero, the fluid flowis slow and lamellar. This lamellar flow has theone-dimensional symmetry of the vertical axis.Top right. Annular vortices or cells appear in thefluid (so-called Taylor cells) as the stirring ratepasses a critical value. The stack of vortices hasthe zero-dimensional symmetry of a discrete setof points within the vertical axis. In the transitionto annular vortices, a spatial symmetry breakinghas occurred. Bottom left. At the next critical valueof the stirring speed, the Taylor cells exhibitwaves that rotate within the fluid. Temporal sym-metry is broken, with periodic variation occurringat each point in the fluid. Bottom right, A furtherincrease in stirring leads to weakly turbulent fluidmotion. Segments of dislocated Taylor cells moveabout chaotically. [Adapted from Abraham &Shaw (1987).]
parameters" (e.g., stirring velocity) whosechanges led to their appearance. Through aninstability sequence, the atomisms (the fluidmolecules) are permanent, but the collectivepatterns come into existence, persist, anddie under the indirect control of the non-equilibrium constraints (Haken, 1983; Iber-all & Soodak, 1987; Nicolis & Prigogine,1989).
As intimated, fluctuations are of specialsigniflcance to the appearance of new pat-terns. Particularly important is the role theyplay at the crucial moment of transition,where the system has to perform a criticalchoice. In the Rayleigh-B^nard system, thechoice is associated with the appearance of

1180 Child Development
a right-handed or left-handed cell. The mac-roscopic cells formed at the first instabilitycomprise in the order of l(f atomisms be-having in a singularly coherent fashion;They rotate in a rightward or leftward direc-tion, with adjacent macroscopic cells rotat-ing in opposite directions. The direction ofrotation is decided by chance, through thedynamics of fluctuations. In effect, the sys-tem explores the dynamical landscape via itsfluctuations, testing the different collectivemotions of the atomisms, and making a fewinitially unsuccessful attempts at stabilizing.Eventually, a particular fluctuation takesover and becomes stabilized. At this junc-ture the system now has a history in that itssubsequent evolution depended on this crit-ical choice. Borrowing ideas from biologi-cal evolution, "fluctuations are the physicalcounterpart of mutants, whereas the searchfor stability is the equivalent of biologicalselection" (Nicolis & Prigogine, 1989, p. 73).
Chance or randomness plays a decisiverole in the choice of new structures by takingthe system increasingly further away fromequilibrium (the stable state that it currentlyoccupies) in an unpredictable direction. Thechoices are magnified immensely by chaos,a process of deterministic or constrained ran-domness. Many physical systems that are de-terministic in the typical sense that the im-mediately next state follows unequivocallyfrom the present state are at the same timerandom in that their trajectories in the longterm are unpredictable. Small differences inthe conditions from which the system beginsits trajectories lead eventually to extremelylarge differences among those trajectories;as observers, we cannot determine a chaotictrajectory unless we are first given it. Thisrandomness, however, is constrained be-cause the system lives in a well-defined, al-beit complex, space or manifold of states andso its meanderings are bounded in the longrun. Further, the deterministic nature of thesystem means that its trajectories cannot in-tersect. In consequence, its nonrepeatingtrajectories continually bend and fold topenetrate all points in the manifold. Chaos,therefore, is tantamount to an exploratoryprocess in which every one of a system's dy-namical possibilities is examined.
Once discovered and stabilized, thenew pattern formed by the interplay of con-tinuum level and atomistic level processespersists by means of balancing the lossesand gains in energy and materials. Thelosses are from the system to the surroundand the gains are from the surround to the
system. The balance is achieved by the cy-clic transport of energy and matter across thesystem's borders. As a general principle, acooperativity of cyclic processes, interpretedtechnically as thermodynamic engine cy-cles, is responsible for pattern persistence(Iberall & Soodak, 1987). Spectroscopic an-alysis is needed to reveal the componentperiodic mechanisms, the time domains inwhich they occur, and the manner in whichenergy is distributed among them.
Issues of pattern formation in biologi-cal systems.—The preceding examples ofstatistically unstable physical systems gen-erating a hierarchy of patterns are addressedby theories in which fundamental laws andprinciples are of primary importance and ini-tial conditions assume only a minor role.Within biology, embryology and evolution-ary biology are the subdisciplines most dom-inated by questions of progressively orderedforms and the emergence of new patterns.Unlike accounts of the physical systems justdiscussed, the most common treatment ofthese phenomena of biological systems em-phasizes special initial conditions and con-straints and relies only weakly, if at all, ongeneral laws and principles. It is often sug-gested that all the information necessary forgenerating a time-evolving pattern is pres-ent in the parts (the atomisms), its spontane-ous emergence or assembly occurring sim-ply as a consequence of their interactions.Thus, the self-assembling process oi em-bryogenesis is by means of a genetic pro-gram that determines an organism's molecu-lar components together with the spatial andtemporal details of their appearance, and byinteractions among these components viashort-range forces. Under this interpretationthere is little room for general laws forma-tive of biological pattern. A genetic programis the result of random permutation and nat-ural selection, that is to say, determined bycontingency, not by law. It is constrainedonly by the measures of survival success andnumber of offspring.
Von Baer in the early 1800s providedmodern embryology with its major departurepoints, in particular, the understanding thatdevelopment proceeds from the general tothe special, from the apparently homoge-neous to the patently heterogeneous, fromthe simple to the complex (Oppenheimer,1967). In sum, he advanced the idea of em-bryogenesis as differentiation: "All is trans-formation, nothing is development denovo . . . . If a part is formed by internaldifferentiation there was not a hole there be-

Turvey and Fitzpatrick 1181
fore" (Oppenheimer, 1967, p. 298). The coreproblem, therefore, is that of how cells thatare initially undifferentiated "know " the siteand manner of their differentiation. Becausedifferentiation is a process in time and not afixed state, the ultimate challenge is ac-counting for the successive order. Hypothe-ses about spatial distinctions among embry-onic parts, however profound, are secondaryto hypotheses about the progression of dif-ferentiation.
Aspects of the interplay between adja-cent and successive order suggest that themolecular composition basis to the program-driven account of differentiation is overval-ued. Stated simply, composition alone doesnot determine pattern (Goodwin, 1987). Ofparticular significance are the empiricalmanifestations of Dreisch's (1929) field con-cept and of the classical gradient theory (seeChild, 1941)—relative position in the wholeembryo is an important determinant of cellfate. A cell's development is dictated not byits composition but by its field position.Transplanting a cell from one region of theembryo to another causes it to develop alongthe lines typical of cells in the host region.It appears that the parts that emerge in dif-ferentiation do so as the result of local andglobal ordering strategies.
Important alternatives to the strict pro-gram-driven account are available. Althoughthey are far from uniform in their emphases,they may be viewed as approximations toa thoroughgoing execution-driven account(Kugler & Turvey, 1987; Yates, 1987a) ofthe embryogenic process. The structuraland functional order characteristic ofembryogenesis could follow from crude(sparsely detailed, fuzzy) initial conditions ifattractor portraits—singular states (attrac-tors) and surrounding gradients (basins)—evolve in the course of "executing" em-bryogenesis and can act as constraints uponit. In the evolving dynamic of execution-driven development, upcoming states de-pend upon current states rather than uponprior (e.g., stored, programmed) states. Allthat is required of the initial conditions isthat they put the system into the basin of thefirst-evolving attractor. Embryogenesis canthen (self) organize by converging onto thesuccessive attractors via the gradients ofstates associated with their respectivebasins.
One major line of thought on generalstrategies of biological pattern formation asan execution-driven process was initiated by
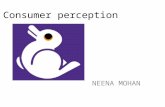
Turing (1952). He proposed that a reaction-diffusion mechanism, in which unequaldiffusion rates of the reactants are destabi-lizing, could generate heterogeneity fromhomogeneity. Specifically, if at some pointreaction rates adjusted too slowly to estab-lish equilibrium, then any small spatial dis-turbance (a spatial fluctuation) could be-come unstable and a pattern could emergein a previously unpatterned distribution (seeFig. 2). In the Turing process, a "prepattern"is established in a concentration of chemi-cals referred to as "morphogens," chemicals(as yet unknown) that have specific effectson morphogenesis. The prepattern notionexpresses the idea that antecedent to the pat-tern of interest (e.g., the visible coat mark-ings of a zebra) there exists a spatial varia-tion in something that resembles in someway the pattern of interest (for the zebramarkings, a chemical pattern in or under thezebra's epidermis). The Turing chemicalprepattern depends strongly on the geome-try and scale of the domain where the chemi-cal reaction takes place (Murray, 1988,1990). With all other parameters held con-stant (e.g., reaction and diffusion rates), pat-terns change as geometry changes (e.g., froma cylinder of uniform diameter to a taperedcylinder) and as scale changes. With respectto the latter, a Turing mechanism repro-duces the fact that the coats of animalschange from uniform to patterned and backto uniform as animal size changes from small(e.g., mice), to intermediate (e.g., leopards,zebras), to large (e.g., elephants) (Murray,1988, 1990).
In the chemical prepattern perspective,cell differentiation, changes in cell mor-phology, and cell migration occur after theformation of the prepattern. That is, morpho-genetic processes are separate from andsubsequent to the process constraining theirnature and direction. There is, however, analternative dynamical perspective in whichchemical patterning and morphogenesis oc-cur simultaneously as a unitary process andin which there is no need for the question-able hypothesis of chemical morphogens. Inthe mechanochemical approach, as this al-ternative dynamic is called (Murray, 1990),chemical patterning, form-shaping cellularmovements, and the embryological tissueenveloping the cells interact continuously togenerate the observed adjacent and succes-sive order. Central to this approach is thefact that because most nerve cells are bornclose to the inner surface of the neural tube,they have to migrate past cells born at earlier

1182 Child Development
FIG. 2.—A depiction of Turing's (1952)model of pattern formation by reaction-diffusionprocesses, (i) The uniform distribution of the mor-phogen. (ii) A fluctuation in the morphogen distri-bution, (iii) The morphogen grows by stimulatingits own production. Through reactive processes,morphogen growth is accompanied by an ampli-fication in the chemical (dotted curve) that damp-ens the growth of morphogen. Because this inhibi-tor has a higher diffusion constant, it spreads outat a faster rate than the morphogen. (iv) At anyspatial region where the inhibitor is more plenti-ful than the morphogen, a further decrease occursin the morphogen due to reactive processes, (v) Adecrease in morphogen decreases reactively theinhibitor which causes, in turn, an amplificationin the morphogen. The result is a pattern of peaksand troughs in the spatial distribution of morpho-gen. [Adapted from Beltrami (1987).]
stages in order to reach their final positions(Brown, Hopkins, & Keynes, 1991). Cellsmove by exerting forces on their surround-ings, deforming them. The deformations in-duce spatial inhomogeneities, which in turnconstrain the cell motion. In overview, mi-gratory movements constitute a dynamicsshaped by many influences (e.g., an extracel-
lular matrix that deforms to create compres-sion and tension wrinkles extending severalhundreds of cell diameters; density, chemi-cal, and adhesive gradients permitting di-rected upward and/or downward motions; afield generated by electrical potentials creat-ing preferred directions, and so on). Collec-tively, these various influences of a largelymechanical nature specify locally how indi-vidual cells should differentiate and globallyhow multiple individual differentiationsshould coordinate over large length scales.The relevant equations of state and equa-tions of change capturing these influencesexpress conservation of cell population den-sity, interplay between cellular and extracel-lular forces, and conservation of the extra-cellular matrix (Murray, 1990). It becomesevident from these representations of the dy-namics of morphogenesis that specific pat-terns arise as a function of the residency ofthe control parameters in specific regions ofthe parameter space, and that a slow varia-tion in a given parameter can bring abouteither a gradual or a discontinuous changein form depending on the parameter's natureand its position in the parameter space. Italso becomes evident why certain lines ofdevelopment and the patterns they wouldgive rise to, such as a trifurcation (a branch-ing of one element into three) in the carti-lage patterning of developing limbs, rarelyoccur. The range of parameter values dictat-ing a trifurcation is extremely narrow andthe resultant pattern is unstable.
The preceding presents mechanicalforces as the principal players in the produc-tion of the sequential order of tissue pat-terning and shape changes in the developingembryo (Murray, 1990). It paints a picture ofembryogenesis that seems to accord with avery general principle, namely, force andform joining locally to create forms of greatersize and time scales (Iberall & Soodak,1987). It highlights that each level of the pat-terning process has its own dynamics impos-ing, in turn, constraints on what develop-ments are subsequently possible. And itsuggests that the morphological complexityof mature organisms and their intermediateembryonic patterns may not be irreduciblycomplex, and that general dynamical lawsand principles may render the diversity in-telligible (see Goodwin, 1987).
The contrast between biological andphysical pattern formation.—Despite im-portant analogies, there are profound differ-ences of principle between embryogenesisand the emergence of structure in physical

Turvey and Fitzpatrick 1183
and chemical systems. First, the order thatemerges in the Rayleigh-Benard simmeringmachine and the Couette-Taylor stirringmachine (see above and Fig. 1) is not de-termined by the molecules comprising thefluids. It is truly spontaneous. In contrast,embryogenetic form is specific to the one-dimensional DNA string. Different stringsdetermine different forms in (increasingly)predictable ways. Second, the spontaneousorder observed in physical and chemical sys-tems is brought about by manipulating aboundary condition as a control parameter.That is, the control is exerted globally, at thecontinuum level. The nonspontaneous andpredictable order observed in embryogene-sis is brought about largely by controllinginfluences exercised by DNA. That is, thecontrol in embryogenesis, to an importantdegree, is exerted locally, at the atomisticlevel. Third, the phenomena expressed bythe Rayleigh-Benard and Couette-Taylorconvective instabilities are affected signifi-cantly by microscopic fluctuations, as notedabove. In contrast, embryogenesis is oftenremarkably unaffected by nonsubtle alter-ations of the biological tissue, as was alsonoted above. Taking an extreme case, hy-droid can reassemble following a completerearrangement of its parts.
The challenge of biological morphogen-esis is to understand how a global organiza-tion (in both structure and function) isachieved in which all the specialized detailsat all process scales are in place and interre-lated. By definition, patterns are field orcontinuum properties; they are definedglobally. The challenge of biological mor-phogenesis seems to be understanding howlocalized interactions can exercise globalcontrol or, more precisely, the coordinationof local sources of influence with the globalconditions needed to engender the requisitepatterns. An advantage of the previouslydiscussed mechanical perspective on em-bryogenesis is that it provides intuitionsabout modes of local-global coordination.
Morphogenesis based on synergetic,specificational information.—It is possibleto gain further insight into the local-globalrelation by examining an instance of mor-phogenesis that is provided by social in-sects. To set the stage, consider that thegrowth of an individual organism looks somysterious from a strictly local vantage pointbecause the components that grow differ-ently all have the same DNA. If one choseto interpret this fact as each molecule pos-sessing the basic blueprint for development.
then one would be faced with explaininghow each cell takes responsibility for exe-cuting different parts of the overall plan. Re-taining the local perspective, one might con-jecture a metaplan instructing each cell as toits duties. The metaplan could exist only inthe DNA, however, leading to an infinite re-gress (Davis, 1988). Efforts to address coop-erative, self-organizing phenomena in socialinsects have often taken the preceding form(e.g., each insect carries the global blue-print) without recognizing the infinite re-gress enjoined by such an account.
Flying termites build large structuresthrough the collective activity of several mil-lion participants. Each individual insectabides by two injunctions: (a) move in thedirection of the strongest pheromone gra-dient, and (il) deposit building materials(which contain the pheromones) at the pointof maximal concentration. These injunctionsare a kind of information that is carried byeach insect. Like the DNA in an individualcell, they do not distinguish among the par-ticipants in the growth process. The controlconstraints that organize the local and globalbuilding activities arise in the low-energypheromone field (low relative to the energyscale of the individual insect) that is linkedto the individual insect via a chemical affin-ity. The low-energy linkage forms a circu-larly causal process in which the forces of aninsect (those that move it around the build-ing site according to the gradients) affect thedistribution or flow of pheromones (becausethe insect is biased to deposit at one particu-lar location rather than another), which inturn affects how the insect moves, that is, theforces it generates, and so on. This simplecircular process between local insect mo-tions and global pheromone patterns real-izes a succession of discontinuities in thepheromone field, a hierarchy of symmetry-breaking instabilities that correspond to dis-tinct phases of the collective nest-buildingact (Kugler & Turvey, 1987, 1988).
We elaborate briefly on two key ideas.One is that the pheromone field induceslong-range correlations in the behaviors ofthe termites. As the number of insects par-ticipating increases beyond some criticalvalue, random deposit sites tend to receivefurther deposits because of the increasedprobability that an insect will be capturedby a pheromone diffusion gradient. Further,sites that randomly gain the edge in size willbe sites that attract more termites because ofgreater surrounding gradients. In conse-quence, these sites will grow into pillars au-

1184 ChildDevelopment
tocatalytically (the more material they have,the more material they will get), and the tra-jectories of the termites will become morecorrelated (they converge on common suc-cessions of points). The second key idea isthat cooperative and competitive processeswithin the pheromone field result in theemergence of a finite number of convergingand diverging flow regions, originating andterminating in critical states (e.g., point at-tractors and saddlepoints). These flow pat-terns constitute a kind of information thatcan be termed (a) synergetic, because theyare produced by the cooperativity of the sys-tem (Haken, 1988), and (b) specificational,because they are specific to evolving statesof the nest and constrain the flights and de-posits of the termites so as to bring aboutthe requisite material configurations (pillars,arches, domes) (Kugler & Turvey, 1987). Forexample, the interactions of the diffusionstreams from the pinnacles of two neigh-boring pillars form a gradient field con-taining a saddlepoint (between the two pil-lars) and two point attractors (one at eachpinnacle). An insect may enter this fieldfrom a direction that carries it to the sad-dlepoint. Once there, there are two orthogo-nal routes that lead directly to the inner edgeof the tops of the two pillars. A fluctuation atthe saddlepoint determines which route theinsect follows. The saddlepoint is a symme-try-breaking mechanism for biasing depositsaway from the centers of the two pillars. Theresult is an arch that curves upward towardthe saddlepoint.
In sum, the nest building is a self-complexing phenomenon that is driven bythe locally defined expedient behavior of theinsects coupled to the global diffusive pat-terns of the pheromone field. In the self-organization of the nest, only crude initialconditions common to all participants areneeded to get things going; once started, theprocess becomes parasitic upon, and drivenby, reaction-diffusion processes, and it be-comes highly differentiated. Termite nestbuilding is a paradigmatic example of exe-cution-driven morphogenesis. It is also aparadigmatic example of a self-organizinginformation system. Unlike the cells inembryogenesis that are directed by mechan-ical forces, the termites are directed by time-evolving patterns of a low energy field thatconstitutes for them information specific tothe emerging nest.
Development of patterns of neural con-nectivity.—Returning to morphogenesis inindividual organisms, a most important fea-
ture of neural circuitry in mammals andother vertebrates is that its formation ex-tends well beyond birth. Intuitively, themechanisms that extend the time scale of thegenesis of synapses have general signifi-cance for a developmental theory of percep-tion-action systems.
The phrase neural connections refers tothe number and patterning of axonal anddendritic branches together with the synap-tic relations established by them. The classi-cal accounts of the basis for neural connec-tions and the manner of their developmentare associated with Paul Weiss and (his stu-dent) Roger Sperry. On the basis of experi-ments on limb transplantation in amphibi-ans, Weiss proposed that the specificity ofthe fit between nerve cells and their targets(e.g., muscles, sensory receptors, other neu-rons) was functional (see Weiss, 1968, for aretrospective overview). An extra limb trans-planted in the neighborhood of a normallimb exhibited the same spatiotemporal lo-comotory pattern. A resonance was sug-gested between the neural target and itsinnervational pattern. Subsequently, thisresonance notion was advanced as the ideaof myotypic specification: Muscle targets(and thus, somatic function) dictated thecentral pattern of connections of motor unitscontacting the targets in a random fashion(Weiss, 1941). Sperry (1963) challenged thisconception of highly malleable connectionsopen to reorganization as function dictated.His experiments on optic nerve regenerationin amphibia with a surgically rotated eye re-vealed that axons reestablished tbeir origi-nal connections; the new functional de-mands did not inspire a change of pattern. Achemoaffinity hypothesis was proposed sug-gesting a rigid prescription for the formationof connections based on the unique chemis-try of individual neurons. With further re-search on the retinotectal system, however,it became evident that regenerating retinalneurons do in fact contact target cells differ-ent from those originally innervated (e.g.,Schmidt, Cicerone, & Easter, 1978). It isnow understood, contrary to Sperry's conjec-ture, that cellular chemical affinities do notfix the pattern of neural connections. Thecurrent impression is that, by and large, theexperimental evidence supports neitherWeiss nor Sperry (Purves, 1988).
The preceding ideas and their criticismsare well known and can be iound in anystandard textbook. Less well known are twoperspectives that are, to a significant degree,contemporary responses to the inadequacies

Turvey and Fitzpatriek 1185
of the earlier formulations. Gaining in popu-larity is a notion of nervous system develop-ment that emphasizes selective and regres-sive processes analogous to the Darwiniantheory of natural selection. For anatomicalor functional reasons, some connectionsfrom an initially established repertoire ofconnections are selected while others areeliminated, so that overall there is a netreduction in connectivity (Changeux, Cour-rfege, & Danchin, 1973; Changeux & Dan-chin, 1976; Edelman, 1981, 1987). A para-digmatic finding motivating such a view isthe transformation from the neonatal organi-zation of many motor neurons innervating agiven bundle of muscle fibers to the adultorganization of a single source of innervation(e.g., Bennett, 1983). An influential readingof observations of this latter kind is that theyindicate a neuronal competition arising fromthe dependence of neurons on a resourcethat comes in limited supply. Any motorneuron seeking to acquire a given target re-source faces competition from other motorneurons seeking the same resource. In re-solving the competition, participants aregradually eliminated until only one remains.
Founded upon very much the same database, but with potentially different implica-tions, is the trophic theory (e.g.. Brown et al.,1991; Purves, 1980, 1986, 1988). The coreassumption of this theory is that the pat-terning of neural connections is subject toongoing regulation by interactions with thecells that they contact. Nerve cells and theirtargets nourish (hence the term trophic)each other in their two-way interactions. Bythis theory, the repertoire of connections isnever complete. There is a continuous mak-ing and breaking of connections sugges-tive of a self-reorganization or rearrange-ment rather than elimination. The continuitymeans that the mature nervous system ischaracterized by a continual remodeling; themature connective pattern is an ongoing dy-namic, an actively produced and maintainedorganization rather than a temporally frozenarchitecture. From the vantage point of tro-phic theory, whether there is a net decreaseor net increase in connections is immaterial.Of primary significance is the capacity ofnerve cells to reorganize their connectionscontinually (Purves, 1988).
It was intimated above that chaos freesdynamics from the restrictions of order andpredictability, permitting a system to inves-tigate in random fashion all of its dynamicpotential. Intuitively, deterministic random-ness is a highly effective strategy when-
ever and wherever a system must respondadaptively to conditions that are unpredict-able in their nature and their timing. Chaoscan provide solutions nondeterministicallywith a probability of one (Ford, 1990). Ac-cordingly, neural pattern formation by theforegoing accounts is analogous to chaoswith feedback. If the fonnation of neuralconnections was fully program driven, thenthe program would have to catalogue alllikely environmental and biodynamic chal-lenges. The alternative is to possess a meansfor generating variations of synaptic patternsrandomly (i.e., chaos) and a means of prun-ing them according to their success in ad-dressing the given problem (i.e., feedback).A chaotic system with feedback eschewsforeknowledge of the kinds of challenges itwould face and the kinds of resolutions itwould achieve.
Developmental issues in physical-sym-bol systems.—In the above expressions ofpattern formation in physical and biologicalsystems, it is largely the free interplay offorces that realizes stationary and transitorystates. New orderings are consequences ofconditions on a system's continuous dynami-cal processes. Efforts to understand the neworderings characteristic of the developingchild commonly take a very different per-spective, however—one in which the focusis discrete symbolic processes. Perceptionand action are interpreted as computationsover representations, suggesting that thesebiological capabilities—in their mature anddeveloping forms—can be accounted for(simulated by) discrete occurrences in au-tomata. This is, of course, the now-classicalphysical-symbol system hypothesis (Newell,1980), which holds that any system of suffi-cient complexity to be called intelligent is asymbol-manipulating system.
It is important to inquire whether astrictly symbol-manipulating system can in-deed develop. The question has to be sharp-ened somewhat: Can there be a progressiveemergence of truly new levels of order? Sup-pose that perception and action capabilitiesdevelop according to a strategy in whichhypotheses are advanced and evaluated; forexample, "If I close the shoulder joint angleat rate u and the elbow joint angle at rate vthen I will get an arm trajectory of the kindT." A hypothesis would have to be repre-sented by the concepts available to thechild, as would the evidence (e.g., muscularsensory data, visual impressions, environ-mental consequences) for its evaluation. Ifthe evidence is sufficient to confirm the hy-

1186 ChildDevelopment
pothesis, then the fact (in our example, amovement control strategy) to which the hy-pothesis refers can be registered in the rep-resentational (symbolic) medium. It must hethe case, however, that the range and varietyof hypotheses that can be entertained, andthe range and variety of evidence statementsthat can be considered, are restricted to theexpressive range of the symbols available tothe child at that particular point in time. Thechild's symbol system must be sufficientlyrich to represent the conditions referred toby hypothesis and evidence. Any hypothesisor source of evidence that requires othersymbols, different from tbose comprising thechild's current representational medium, areruled out.
An argument of the preceding kind is acriticism of the idea that the developmentof a child's perception-action capabilities isfundamentally the development, throughconcept formation, of increasingly morepowerful representational-computational sys-tems (Fodor, 1975). The argument rejects acomputational means of increasing the rep-resentational complexity of a strictly symbol-manipulating system. Such a system cannotdevelop the capacity to represent morestates of affairs (hypotheses, evidence) atsome later date than it can represent in thepresent. What it can do, on the basis of itsexperiences, is increase its appreciation olthe states of affairs that do in fact obtain.With respect to the question posed above("Can there be a progressive emergence oftruly new organizations?"), the answer is"no " if the only mechanism of change is con-cept formation. Accordingly, if one is in-clined to the idea that child developmentdoes entail transitions from weaker tostronger conceptual systems underlying per-ception-action, and does entail new ordersof complexity, then one must look elsewherefor the basis of such development. Withinthe computer metaphor, one would need toconsider, for example, ways in which thephysical structure of the "computer " is al-tered. Considerations of this kind would re-turn the discussion of the child's develop-ment of perception-action capabilities to thetypes of symmetry-breaking characteristic ofcontinuous dynamical processes and/or tothe processes formative of neural collec-tives.
To round out these comments, we notethat the issue of how the concepts in thecomputational-representational perspectiveare grounded, that is, how they can refer tothe child's body and to its environment, is
usually ignored. Similarly ignored is the is-sue of the origins of the constraints on theinference mechanisms, that is, the reasonsthat these mechanisms should function injust that way that renders their conse-quences relevant to the control of action.(For a variety of discussions of the signifi-cance and implications of these issues, seeCarello, Turvey, Kugler, & Shaw, 1984;Clancy, 1992; Edelman, 1985; Harnad, 1990;Johnson-Laird, Herrman, & Chaffin, 1984;Turvey & Shaw, 1979; Turvey, Shaw, Reed,& Mace, 1981). The neural network perspec-tive promises resolution of these issues inthat concepts and constraints are emergent,arising from the interactions among verymany subsymbolic processing units nestedwithin interactions of the body and its sur-roundings. NETtalk (Sejnowski & Rosen-berg, 1987) is often cited as an example ofsuccessful emergence. A recent critical ex-amination reveals, however, that the concep-tual distinctions eventually exhibited by thenetwork are encoded implicitly in the pat-terns fed to the network (Verschure, 1992).An unequivocal case of true emergence insubsymbolic systems remains to be demon-strated.
Hypotheses about the Developmentof Perception-Action Capabilities
To conclude, we take major themes fromthe articles of this special issue and expressthem through the concepts identified in thepreceding survey of theories of pattern for-mation. The result is an inventory of devel-opmental hypotheses. This inventory sug-gests the possibility of a dynamics approachto child development (Kugler, Kelso, & Tur-vey, 1982) as an alternative to conventionalapproaches emphasizing maturation (nativ-ist), specific learning experiences (empiri-cist), cognitive stages (Piagetian), and strate-gies of encoding and retrieval (informationprocessing).
Hypothesis 1.—Development is not ofperception and action separately but of uni-tary perception-action systems in which thecomponents relate mutually and recipro-cally. Mutuality implies a sameness, a shar-ing by perception and action of a commonbasis. Reciprocity implies that they functionin distinct but complementary ways.
Hypothesis 2.—The development andfunctioning of perception-action systems arepattern formation processes. That is, percep-tion-action systems are macroscopic dynami-cal systems formed from the collective ac-
tion of many degrees of freedom. They areidentified by one or more collective vari-ables and associated with one or more at-tractors.
Hypothesis 3.—The specific percep-tion-action patterns developed by the childare not present beforehand; that is, they arenot encoded in either the neural or biome-chanical degrees of freedom.
Hypothesis 4.—Crowth-related changesof forces and scales are one source of newperception-action patterns. The forces arethose acting upon and produced by thechild. The scales are the lengths and massesof the child's body and of the supporting andopposing features of the environment. Atcritical values of force and scale, existingpatterns become unstable and new patternsemerge.
Hypothesis 5.—The properties, fea-tures, dimensions, and so on, whose changeslead to new perception-action patterns, areunspecific to the new patterns, neither re-sembling them nor prescribing their details.Conventionally, these changes are referredto as control parameters.
Hypothesis 6.—Specific perception-action patterns arise most generally as afunction of the control parameters residingin specific regions of the parameter space.Most generally, therefore, developing a newpattern requires that the child discover theappropriate region of control parametervalues.
Hypothesis 7.—With respect to limbcontrol, the child explores how forces (mus-cular and nonmuscular) and forms (limb con-figurations) join locally to create spatiotem-poral organizations of greater size and timescales (interlimb movement patterns).
A. Nonspecific and aperiodic move-ments of the infant provide a rich source ofrandom interactions with the body's append-ages and with the surroundings. These per-mit the infant to explore, in chaos-like style,various parameter spaces.
B. Achieving fluency in intra- and in-terlimb coordination is the progressive dis-covery of how to sculpt the force structuresassociated with spatiotemporal configura-tions of limb segments and environmentalobjects (e.g., gravitational, elastic, and reac-tive forces) into the force structures that arerequired. The discovery is of patterns ofmuscular forces that are economical in timeand magnitude.
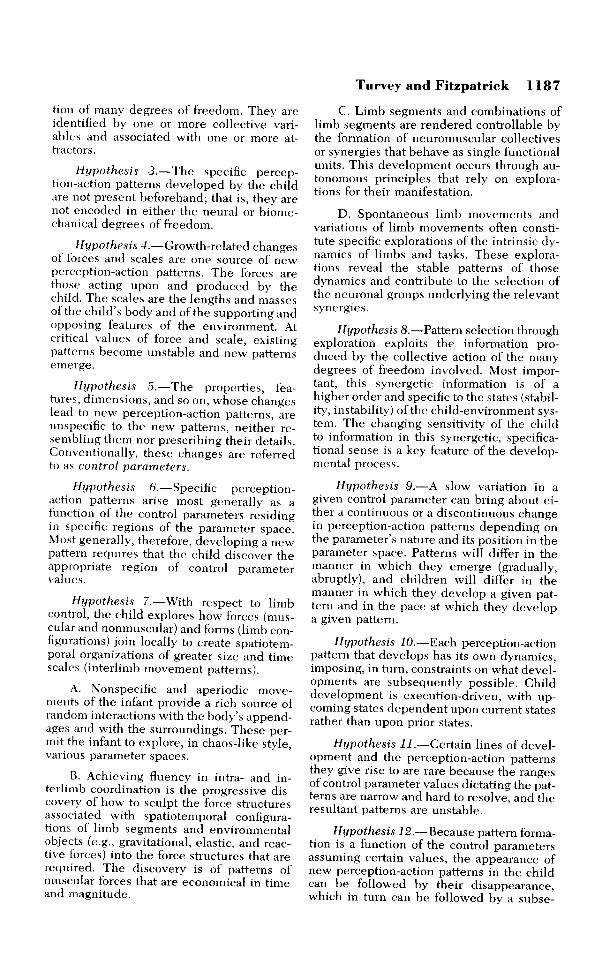
Turvey and Fitzpatrick 1187
C. Limb segments and combinations oflimb segments are rendered controllable bythe formation of neuromuscular collectivesor synergies that behave as single functionalunits. This development occurs through au-tonomous principles that rely on explora-tions for their manifestation.
D. Spontaneous limb movements andvariations of limb movements often consti-tute specific explorations of the intrinsic dy-namics of limbs and tasks. These explora-tions reveal the stable patterns of thosedynamics and contribute to the selection ofthe neuronal groups underlying the relevantsynergies.
Hypothesis 8.—Pattern selection throughexploration exploits the information pro-duced by the collective action of the manydegrees of freedom involved. Most impor-tant, this synergetic information is of ahigher order and specific to the states (stabil-ity, instability) of the child-environment sys-tem. The changing sensitivity of the childto information in this synergetic, specifica-tional sense is a key feature of the develop-mental process.
Hypothesis 9.—A slow variation in agiven control parameter can bring about ei-ther a continuous or a discontinuous changein perception-action patterns depending onthe parameter's nature and its position in theparameter space. Patterns will differ in themanner in which they emerge (gradually,abruptly), and children will differ in themanner in which they develop a given pat-tern and in the pace at which they developa given pattern.
Hypothesis 10.—Each perception-actionpattern that develops has its own dynamics,imposing, in turn, constraints on what devel-opments are subsequently possible. Childdevelopment is execution-driven, with up-coming states dependent upon current statesrather than upon prior states.
Hypothesis 11.—Certain lines of devel-opment and the perception-action patternsthey give rise to are rare because the rangesof control parameter values dictating the pat-terns are narrow and hard to resolve, and theresultant patterns are unstable.
Hypothesis 12.—Because pattern forma-tion is a function of the control parametersassuming certain values, the appearance ofnew perception-action patterns in the childcan be followed by their disappearance,which in turn can be followed by a subse-

1188 Child Development
quent reappearance, as control parametersdrift in and out of critical regions.
Hypothesis 13.—Development of per-ception-action systems expresses a weakcoupling of cyclic processes at different timescales. A spectroscopic approach is impli-cated, directed at revealing the relation be-tween the important repetitive processes go-ing on within the child-environment systemand the time domain in which they occur.
The preceding 13 hypotheses vary indegree of specificity. Some are more sugges-tive of concrete experimental questions thanothers. Further, the preceding 13 hypothe-ses vary in scope. Some are considerablybroader in the range of developmental pro-cesses they are intended to cover than oth-ers. Ideally, the reader can discern the jointorigins of the hypotheses in the articles ofthis special issue and the survey of patternformation principles. The list of hypothesesis certainly neither complete nor correct inall of its details, and there are surely redun-dancies. It does, however, convey the kindsof conceptions that would be included in atheory of child development that took gen-eral principles of pattern formation as its de-parture point.
Concluding Remarks
There are a number of motives for re-lating perception-action capabilities to pro-cesses of pattern formation (e.g., Kelso, Del-coUe, & Schoner, 1990; Kugler & Turvey,1987; Turvey, 1990), for emphasizing infor-mation in its synergetic and specificationalsense (Cibson, 1986; Haken, 1988; Kugler &Turvey, 1987; Turvey, 1992), and for ex-pressing developmental issues in generaldynamical terms (see Kugler et al., 1982;Schoner & Kelso, 1988; Thelen, 1989). Theimmediate benefits of pursuing a dynamicsapproach are radically new and potentiallyproductive ways of thinking and inquiringabout child development. The long-termbenefits are disclosures of the intimate con-nectedness between human behavior andthe rest of nature (Haken, 1983; Iberall,1987; Yates, 1987b).
References
Abraham, R. (1987). Dynamics and self-organi-zation. In F. E. Yates (Ed.), Self-organizingsystems: The emergence of order (pp. 599—613). New York: Plenum.
Abraham, R., & Shaw, C. D. (1987). Dynamics:A visual introduction. In F. E. Yates (Ed.),Self-organizing systems: The emergence oforder (pp. 543-597). New York: Plenum.
Abraham, R., & Shaw, C. D. (1988). Dynamics:The geometry of behavior: Part IV. Bifurca-tion behavior. Santa Cruz, CA: Aerial.
Adolph, K. E., Eppler, M. A., & Gibson, E. J.(1993). Crawling versus walking infants' per-ception of affordances for locomotion oversloping surfaces. Child Development, 64,1158-1174.
Ashmead, D. H., McCarty, M. E., Lucas, L., &Belvedere, M. C. (1993). Visual guidance ininfants' reaching toward suddenly displacedtargets. Child Development, 64, 1111-1127.
Beltrami, E. (1987). Mathematics for dynamicmodeling. Orlando, FL: Academic Press.
Bennet, M. R. (1983). Development of neuro-muscular synapses. Physiological Review, 63,915-1048.
Bernstein, N. (1967). The coordination and regu-lation of movements. New York: Pergamon.
Brown, M. C, Hopkins, W. G., & Keynes, R. J.(1991). Essentials of neural development.Cambridge: Cambridge University Press.
Bushnell, E. W., & Boudreau, J. P. (1993). Motordevelopment and the mind: The potentialrole of motor abilities as a determinant of as-pects of perceptual development. Child De-velopment, 64, 1005-1021.
Carello, C, Turvey, M. T., Kugler, P. N., & Shaw,R. E. (1984). Inadequacies of the computermetaphor. In M. Gazzanlga (Ed.), Handbookof cognitive neuroscience (pp. 229-248). NewYork: Plenum.
Changeux, J.-P., Courrege, P., & Danchin, A.(1973). A theory of the epigenesis of neuronalnetworks by selective stabilization of syn-apses. Proceedings of the National Academyof Science, 70, 2974-2978.
Changeux, J.-P., & Danchin, A. (1976). Selectivestabilization of developing synapses as amechanism for the specification of neuronalnetworks. Nature, 264, 705-712.
Child, C. M. (1941). Patterns and problems of de-velopment. Chicago: University of ChicagoPress.
Clancy, W. J. (1992). The frame of reference prob-lem in the design of intelligent machines. InK. V. Lehn (Ed.), Architectures for intelli-gence (Proceedings of 22nd Carnegie Sympo-sium on Cognition, pp. 357-423). Hillsdale,NJ: Erlbaum.
Clark, J. E, &: Phillips, S. J. (1993). A longitudinalstudy of intralimb coordination in the firstyear of independent walking: A dynamicalsystems analysis. Child Development, 64,1143-1157.
Clifton, R. K., Muir, D. W., Ashmead, D. H., &Clarkson, M. G. (1993). Is visually guidedreaching in early infancy a myth? Child De-velopment, 64, 1099-1110.
Davis, P. (1988). The cosmic blueprint. Cam-bridge: Cambridge University Press.

Turvey and Fitzpatrick 1189
Dreisch, H. (1929). The science and philosophy ofthe organism. London: Black.
Edelman, G. M. (1981). Group selection as thebasis for higher brain function. In F. O.Schmidt, F. G. Worden, G. Adelman, & S. G.Dennis (Eds.), Organization of the cerebralcortex (pp. 51-100). Cambridge, MA: MITPress.
Edelman, C. M. (1987). Neural Darwinism: Thetheory of neuronal group selection. NewYork: Basic.
Fodor, J. (1975). The language of thought. NewYork: Crowell.
Ford, J. (1990). What is chaos, that we should bemindful of it? In P. Davies (Ed.), The newphysics (pp. 348-371). Gambridge: Cam-bridge University Press.
Gibson, J. J. (1986). The ecological approach tovisual perception. Hillsdale, NJ: Erlbaum.
Goodwin, B. (1987). Developing organisms asself-organizing fields. In F. E. Yates (Ed.),Self-organizing systems: The emergence oforder (pp. 167-180). New York: Plenum.
Goldfield, E., Kay, B., & Warren, W. H. (1993).Infant bouncing: The assembly and tuningof action systems. Child Development, 64,1128-1142.
Haken, H. (1977). Synergetics. Berlin: SpringerVerlag.
Haken, H. (1983). Advanced synergetics. Berlin:Springer Verlag.
Haken, H. (1988). Information and self-organi-zation. Berlin: Springer Verlag.
Hamad, S. (1990). The symbol grounding prob-lem. Physica D, 42, 335-346.
Hofsten, C. von, & Ronnqvist, L. (1993). Thestructuring of neonatal arm movements. ChildDevelopment, 64, 1046-1057.
Iberall, A. S. (1987). A physics for studies of civili-zations. In F. E. Yates (Ed.), Self-organizingsystems: The emergence of order (pp. 521-540). New York: Plenum.
Iberall, A. S., & Soodak, H. (1987). A physics forcomplex systems. In F. E. Yates (Ed.), Self-organizing systems: The emergence of order(pp. 499-520). New York: Plenum.
Johnson-Laird, P. N., Herrman, D. J., & ChafBn,R. (1984). Only connections: A critique of se-mantic networks. Psychological Bulletin, 96,292-315.
Kelso, J. A. S., DelColle, J. D., & Schoner, G.(1990). Action-perception as a pattern forma-tion process. In M. Jeannerod (Ed.), Attentionand performance XIII (pp. 139-1692). Hills-dale, NJ: Erlbaum.
Krieger, M. H. (1992). Doing physics. Blooming-ton: Indiana University Press.
Kugler, P. N., Kelso, J. A. S., & Turvey, M. T.(1982). On the control and coordination of nat-urally developing systems. In J. A. S. Kelso &J. E. Clark (Eds.), The development of move-
ment control and coordination (pp. 5-78).New York: Wiley.
Kugler, P. N., & Turvey, M. T. (1987). Informa-tion, natural law, and the self-assembly ofrhythmic movement. Hillsdale, NJ: Erlbaum.
Kugler, P. N., & Turvey, M. T. (1988). Self organi-zation, fiow fields, and information. HumanMovement Science, 7, 97-129.
Murray, J. D. (1988). How the leopard got itsspots. Scientific American, 258, 80-87.
Murray, J. D. (1990). Mathematical biology. Ber-lin: Springer Verlag.
Myklebust, B. M., & Gottlieb, G. L. (1993). Devel-opment of the stietch reflex in the newborn:Reciprocal excitation and reflex irradiation.Child Development, 64, 1036-1045.
Newell, A. (1980). Physical symbol systems. Cog-nitive Science, 4, 135-183.
Nicolis, G. (1990). Physics of far-from-equilibriumsystems and self-organization. In P. Davies(Ed.), The new physics (pp. 316-347). Gam-bridge: Cambridge University Press.
Nicolis, G., & Prigogine, I. (1989). Exploring com-plexity. New York: Freeman.
Oppenheimer, J. M. (1967). Essays in the historyof embryology and biology. Cambridge, MA:MIT Press.
Purves, D. (1980). Neuronal competition. Nature,287, 585-586.
Purves, D. (1986). The trophic theory of neuralconnections. Trends in Neuroscience, 9,486-489.
Purves, D. (1988). Body and brain. Cambridge,MA: Harvard University Press.
Robertson, S. E. (1993). Oscillation and complex-ity in early infant behavior. Child Develop-ment, 64, 1022-1035.
Schmidt, J. T. C , Cicerone, C. M., & Easter, S. S.(1978). Expansion of the half retinal projec-tion to the tectum in the goldfish: An electro-physiological and anatomical study. Journalof Comparative Neurology, 177, 257-278.
Schoner, G., & Kelso, J. A. S. (1988). Dynamicpattern generation in behavioral and neuralsystems. Science, 239, 1513-1520.
Sejnowski, T., & Rosenberg, C. (1987). Parallelnetworks that learn to pronounce Englishtext. Complex Systems, 1, 145-168.
Sperry, R. W. (1963). Chemoaffinity in the orderlygrowth of nerve fiber patterns and connec-tions. Proceedings of the National Academyof Science, 50,703-710.
Sporns, O., & Edelman, G. M. (1993). SolvingBernstein's problem: A proposal for the de-velopment of coordinated movement by se-lection. Child Development, 64, 960-981.
Thelen, E. (1989). Evolving and dissolving syner-gies in the development of leg coordination.In S. A. Wallace (Ed.), Perspectives on thecoordination of movement (pp. 259—284).Amsterdam: North-Holland.

1190 Child Development
Thelen, E., Corbetta, D., Kamm, K., Spencer, J. P.,Schneider, K, & Zernicke, R. F. (1993). Thetransition to reaching: Mapping intention andintrinsic dynamics. Child Development, 64,1058-1098.
Turing, A. M. (1952). The chemical basis of mor-phogenesis. Philosophical Transactions ofthe Royal Society of London, B237, 37-72.
Turvey, M. T. (1990). Coordination. AmericanPsychologist, 45, 938-953.
Turvey, M. T. (1992). Ecological foundations otcognition: Invariants of perception and ac-tion. In H. Pick Jr., P. van den Broek, & D. C.Knill (Eds.), Cognition: Conceptual andmethodological issues. Washington, DC: APAPress.
Turvey, M. T., & Shaw, R. E. (1979). The primacyof perceiving: An ecological reformulation ofperception for understanding memory. InL-G. Nilsson (Ed.), Perspectives on memoryresearch (pp. 167-222). Hillsdale, NJ: Erl-baum.
Turvey, M. T., Shaw, R. E., Reed, E., tk Mace,W. (1981). Ecological laws of perceiving andacting: In reply to Fodor and Pylyshyn (1981).Cognition, 9, 237-304.
Verschure, P. F. M. J. (1992). Taking connection-ism seriously: The vague promise of subsym-bolism and an alternative. Proceedings of the14th annual conference of the cognitive sci-ence society (pp. 653-658). Hillsdale, NJ:Erlbaum.
Weiss, P. (1941). Self-differentiation of the basicpatterns of coordination. Comparative Psy-chology Monographs, 17, 131-169.
Weiss, P. (1968). Research in retrospect. In G.Gabbiani (Ed.), Refiections on biologic re-search (pp. 237-244). St. Louis: Warren H.Green.
Yates. E. (1987a). Quantumstuff and biostuff: Aview of patterns of convergence in contempo-rary science. In F. E. Yates (Ed.), Self-organizing systems: The emergence of order(pp. 617-644). New York: Plenum.
Yates, E. (1987b). General introduction. In F. E.Yates (Ed.), Self-organizing systems: Theemergence of order (pp. 1-14). Xew York:Plenum.
Zernicke, R. F., & Schneider, K. (1993). Biome-chanics and developmental neuromotor con-trol. Child Development, 64, 982-1004.