Commande num�rique simplifi�e et robuste d'actionneurs asynchrones de faible puissance
19
J. Phys. III France 6 (1996) 1039-1057 AUGUST 1996, PAGE 1039 Conunande nuIndrique siInplifide et robuste d'actionneurs asynchrones de faible puissance B. Robyns (~>~), F. Labrique (~) et H. Buyse (~) (~) UniversitA Catholique de Louvain, Laboratoire d'(lectrotechnique et d'lnstrumentation B£timent Maxwell, Place du Levant 3, 1348 Louvain-la-Neuve, Belgique (~) kcole des Hautes ktudes Industrielles, HEI, DApartement Gdnie (lectrique, 13 rue de Toul, 59046 Lille Cedex, France (Regu le 10 juillet 1995, r6vis6 le 14 mars et le 26 avril 1996, accepts le 17 mai 1996) PACS.07.50.-e Electrical and electronic components, instruments and techniques R4sum4. L'actionnement dlectriques h hautes performances au moyen de moteurs h cou- rant alternatif impose des stratdgies de commande AvoluAes liAes au comportement dynamique complexe de ces machines. Ces stratdgies de commande conduisent frAquemment I des algo- rithmes dont l'implantation numdrique exige des microprocesseurs ayant une puissance de calcul AlevAe. Dans un prdcddent article publiA dans le Journal de Physique III, nous avons dAveloppA une approche du problAme de la commande des moteurs synchrones h aimants permanents de faible puissance qui nous a permis de concevoir et d'implanter des algorithmes de commande ne ndcessitant qu'une puissance de calcul rdduite, tout en garantissant des performances statiques et dynamiques satisfaisantes ainsi qu'une bonne insensibilitA aux perturbations agissant sur le systAme et aux incertitudes sur les paramAtres. Dans cet article, nous (tendons cette approche au cas de la commande des moteurs asynchrones de faible puissance. Abstract. High performance motion control with AC actuators needs complex control strategies. The control strategies lead frequently to algorithms requiring powerfull micropro- cessors for their digital implementation. In a previous paper published in the "Journal de Physique III", we evolved an approach of the control of small power permanent magnets syn- chronous actuators which allows to design and to implement control algorithms requiring only a reduced computation power, while maintaining satisfactory static and dynamic performance and a good insensitivity to perturbations and parameter uncertainties. In this paper, we extend this approach to the control of small power induction actuators. 1. Introduction Les systAmes d'actionnement 41ectriques, utilisant des moteurs asynchrones aliment4s par ondu- leur de tension, permettent actuellement d'atteindre des performances statiques et dynamiques Alev4es grice h l'emploi de strat4gies 4volu4es de pilotage du moteur, comme la commande vectorielle 11, 2j. Q Les #ditions de Physique 1996
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Commande num�rique simplifi�e et robuste d'actionneurs asynchrones de faible puissance

J. Phys. III France 6 (1996) 1039-1057 AUGUST 1996, PAGE 1039
Conunande nuIndrique siInplifide et robuste d'actionneursasynchrones de faible puissance
B. Robyns (~>~), F. Labrique (~) et H. Buyse (~)
(~) UniversitA Catholique de Louvain, Laboratoire d'(lectrotechnique et d'lnstrumentation
B£timent Maxwell, Place du Levant 3, 1348 Louvain-la-Neuve, Belgique
(~) kcole des Hautes ktudes Industrielles, HEI, DApartement Gdnie (lectrique, 13rue
de Toul,
59046 Lille Cedex, France
(Regu le 10 juillet 1995, r6vis6 le 14 mars et le 26 avril 1996, accepts le 17 mai 1996)
PACS.07.50.-e Electrical and electronic components, instruments and techniques
R4sum4. L'actionnement dlectriques h hautes performances au moyen de moteurs h cou-
rant alternatif impose des stratdgies de commande AvoluAes liAes au comportement dynamiquecomplexe de
cesmachines. Ces stratdgies de commande conduisent frAquemment I des algo-
rithmes dont l'implantation numdrique exige des microprocesseurs ayant une puissance de calcul
AlevAe. Dansun
prdcddent article publiA dans le Journal de Physique III, nous avonsdAveloppA
uneapproche du problAme de la commande des moteurs synchrones h aimants permanents de
faible puissance qui nous a permis de concevoir et d'implanter des algorithmes de commande ne
ndcessitant qu'une puissance de calcul rdduite, tout engarantissant des performances statiques
et dynamiques satisfaisantes ainsi qu'une bonne insensibilitA aux perturbations agissant sur le
systAme et auxincertitudes sur les paramAtres. Dans cet article, nous (tendons cette approche
au casde la commande des moteurs asynchrones de faible puissance.
Abstract. High performance motion control with AC actuators needs complex control
strategies. The control strategies lead frequently to algorithms requiring powerfull micropro-
cessors for their digital implementation. In a previous paper published in the "Journal de
Physique III", we evolvedan
approach of the control of small power permanent magnets syn-
chronous actuators which allows to design and to implement control algorithms requiring only
areduced computation power, while maintaining satisfactory static and dynamic performance
anda
good insensitivity to perturbations and parameter uncertainties. In this paper, we extend
this approach to the control of small power induction actuators.
1. Introduction
Les systAmes d'actionnement 41ectriques, utilisant des moteurs asynchrones aliment4s par ondu-
leur de tension, permettent actuellement d'atteindre des performances statiques et dynamiquesAlev4es grice h l'emploi de strat4gies 4volu4es de pilotage du moteur, comme la commande
vectorielle 11, 2j.
Q Les #ditions de Physique 1996

1040 JOURNAL DE PHYSIQUE III N°8
Dans sa iorme la plus AlaborAe, le pilotage vectoriel d'un moteur asynchrone conduit h des
algorithmes de commande complexes exigeant une puissance de calcul importante en raison
.des trAs iaibles pAriodes d'Achantillonnage exig4es au niveau du contr61e des grandeursAlectriques
.des problAmes lids h la reconstruction de I'(tat 41ectrique de la machine, h partir des
grandeurs accessibles h la mesure, suite aux incertitudes sur Ies valeurs des paramAtresdu modAle qui la repr4sente et h Ieurs variations dons Ie temps (variation des r4sistances
avec la temp4rature, des inductances avec le niveau de saturation, ).
La rAduction du cofit de la commande, grice h l'emploi de microprocesseurs peu cofiteux est
particuliArement int4ressante dans le cas des systAmes d'actionnement de faible puissance oh
la commande peut repr4senter une part importante du cofit total du systAme. Dans un article
pr4c4dent consacr4 h la commande de moteurs synchrones h aimants permanents de faible
puissance [3j, nous avons montrA qu'il est possible de simplifier [es strat4gies de commande des
moteurs h courant altematif et de [es rendre compatibles avec l'emploi de microprocesseursayant une puissance de calcul r4duite, tout en gardant de bonnes performances statiques et
dynamiques, moyennant l'utilisation ad4quate de certaines techniques de l'automatique et en
4vitant, lorsque ce n'est pas absolument n4cessaire, la mesure de grandeurs variant rapidementtelles que [es courants. Dans le pr4sent article, nous montrons comment 4tendre [es r4sultats
prAsentAs dans la rAf4rence [3j h la commande des moteurs asynchrones de foible puissance(ne d4passant pas la dizaine de kW), utilisAs dans des applications telles que la robotique,[es machines outils,
...,
ok [es performances demandAes en terme de r4gulation de vitesse et
de position sont trAs 4levAes. C'est pourquoi [es systAmes d'actionnement consid4r4s dans cet
article sont tous 4quip4s d'un capteur de vitesse ou de position.
Les commandes du moteur asynchrone pr4sent4es dans cet article sont du type vectoriel et
font appel, comme celles prAsentAes dons la rAfArence [3] h
. un dAcouplage par retour d'Atat r4alis4 en utilisant des valeurs estim4es de certaines
variables d'4tat ([es courants)en vue de lin4ariser le comportement des moteurs, et
de pouvoir utiliser, pour [es r4gulateurs de vitesse et de position, des techniques de
commande robustes d4velopp4es pour Ies systAmes IinAaires
. une r4gulation des courants n'utilisant pas des r4guIateurs PI, mais des r4guIateurs plussimpIe8, combinant une action pr4dictive en boucle ouverte et une r4troaction de typeproportionnel. Nous montrerons que ce type de r4gulateur permet d'obtenir, dans certains
cas, une sensibilit4 du contr61e du flux aux incertitudes sur l'estimation de la r4sistance
rotorique et de l'inductance mutuelle plus foible que celle obtenue lorsque [es courant8
sont r4guI4s au moyen de r4gulateurs PI. Comme dans Ie cas de la commande des moteurs
synchrones h aimants permanents, nous montrerons qu'il est possible de se passer de la
rAtroaction des courants et donc de leur mesure pour assurer leur commande
. une optimisation de I'implantation de I'algorithme dans [es microprocesseurs.
Les performances int4ressantes des commandes pr4sent4es dans cet article sont mises en
4vidence par une 4tude th40rique, par des simulations num4riques et h l'aide de r4sultats
exp4rimentaux.
N°8 COMMANDE DE MOTEURS ASYNCHRONES 1041
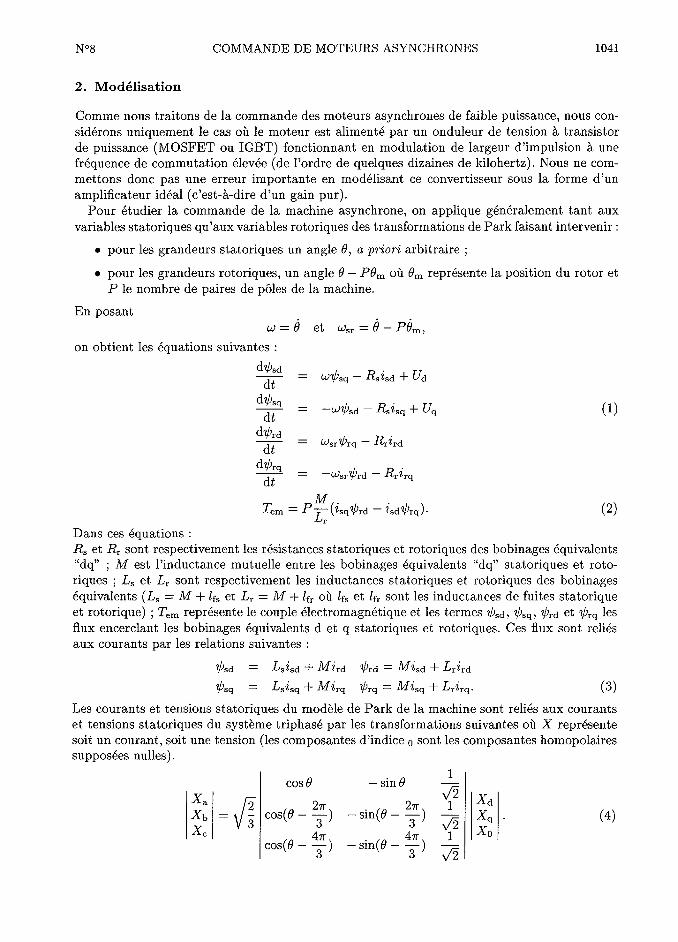
2. Mod41isation
Comme nous traitons de la commande des moteurs asynchrones de foible puissance, nous con-
sid4rons uniquement le cas oh le moteur est aliment4 par un onduleur de tension h transistor
de puissance (MOSFET ou IGBT) fonctionnant en modulation de largeur d'impulsion h une
fr4quence de commutation 41ev4e (de l'ordre de quelques dizaines de kilohertz). Nous ne com-
mettons donc pas une erreur importante en mod41isant ce convertisseur sous la forme d'un
amplificateur id4al (c'est-h-dire d'un gain pur).Pour 4tudier la commande de la machine asynchrone, on applique g4n4ralement tant aux
variables statoriques qu'aux variables rotoriques des transformations de Park faisant intervenir
. pour [es grandeurs statoriques un angle 9, a priori arbitraire
. pour [es grandeurs rotoriques, un angle 9 P9m oh 9m repr4sente la position du rotor et
P le nombre de paires de p61es de la machine.
En posant
~ ~fi et UJsr "
9 ~~rr'
on obtient [es 4quations suivantes:
Tem" P)[isqifird ?sdifirq). 12)
r
Dans ces 4quationsRs et Rr sont respectivement [es r4sistances statoriques et rotoriques des bobinages 4quivalents"dq" M est l'inductance mutuelle entre [es bobinages 4quivalents "dq" statoriques et roto-
riques Ls et Lr sont respectivement [es inductances statoriques et rotoriques des bobinages4quivalents (L~
=M + if~ et Lr
=M + ifr oh if~ et ifr sont [es inductances de fuites statorique
et rotorique) Tern repr4sente le couple 41ectromagn4tique et [es termes ifi~d, ~fisq, ~fird et ifirq [es
flux encerdant [es bobinages 4quivalents d et q statoriques et rotoriques. Ces flux sont rel14s
aux courants par [es relations suivantes
~fisd "Lsisd + Mird ~fird "
M%sd + Lrird
i~sq "Lsisq + M%rq ~firq "
Misq + Lrirq. (3)
Les courants et tensions statoriques du modAle de Park de la machine sont rel14s aux courants
et tensions statoriques du systAme triphas4 par [es transformations suivantes off X repr4sentesoit un courant, soit une tension ([es composantes d'indice
osont [es composantes homopolaires
suppos4es nulles).
))=
~
°S~~~)) Sin(~~~))~~ (4)
~
~°~~~ ~~ ~~~~~ ~~ j~~~

1042 JOURNAL DE PHYSIQUE III N°8
~~
i isd l#rd
~d Rs+7 1+~~TR
I~°l
~ ~~S ~ ~Lr + Js s
i oJ +P
xj
ji +7)
s) )-~
sr
l Rrq Rs +cr Lss Lr
sq
Fig. I. Schdma-bloc de l'actionneur asynchrone.
[Induction actuator block diagram.]
On peut imposer h la variable 9 d'avoir une valeur telle que ifirq soit (gal h z4ro [4,5]. Les
4quations pr4c4dentes deviennent
~~ ~~~~ ~ ~~~~~
~~(~
~~~~~~~ ~~~~
Uq= R~i~q + aL~ ~~~~
+ uJ
~ifird uJaL~i~d (5b)
dt Lr
~~~~ ~~~ ~ ~)~)~
~~~~
~ ~~~ ~ ~/~ ~f ~~~~
Tern= Pjifirdisq. (5e)
)
Dans ces 4quations,a est le coefficient de dispersion, a =
1- (M~/L~Lr). II convient de
remarquer que 9 est maintenant une variable d'4tat du systAme puisque sa d4riv4euJ =
fi a une
dynamique impos4e par l'4quation (5d).Si on considAre que le rotor de la machine et le systAme entrain4 peuvent Atre mod41is4s par
un moment d'inertie J, un couple de frottement dynamique KUJ et un couple r4sistant TR, [es
4quations (5) iournissent le sch4ma bloc de la figure 1.
3. Principe de la commande vectorielle du moteur asynchrone
Le sch4ma bloc de la figure 1 montre que, dans le systAme de variables choisi de maniAre h ce que
ifirq soit (gal h z4ro, le flux rotorique ifird d4pend du courant i~d et le couple 41ectromagn4tiquedu produit du courant i~q par le flux ifird.

N°8 COMMANDE DE MOTEURS ASYNCHRONES 1043
Si on compense [es termes de couplage existant entre [es axes d et q, la tension Usd permetde commander le courant i~d et donc le flux ifird, et la tension U~q permet de commander i~qet donc le couple Tern. On trouve ainsi une analogie avec le moteur h courant continu puisquel'on peut contr61er un flux (jouant un r61e similaire au flux inducteur) et un courant (jouant
un r6Ie de courant d'induit).Le flux est g4n4ralement maintenu constant pour des vitesses rotoriques in14rieures ou (gales
h la vitesse nominale de la machine. Pour des vitesses sup4rieures h la vitesse nominale, le flux
rotorique doit d4croitre lorsque la vitesse augmente afin de limiter la tension aux bomes de la
machine.
La principale difficult4 de la mise en oauvre de la commande vectorielle du moteur asynchroneest liAe au contr61e du flux dans la machine, en raison de la difficult4 de mesurer cette grandeur,voire de l'impossibilit4 d'eflectuer cette mesure lorsqu'il s'agit du flux rotorique. En eflet, seul
le flux d'entrefer est accessible h la mesure, mars cette mesure n4cessite de placer h la p4riph4riede l'entrefer des dispositifs de mesure
(sondes h eflet Hall, spires de d4tection) qui entrainent
une augmentation du cofit de fabrication de la machine et la rendent plus fragile.
C'est pourquoi [es commandes bas4es sur une mesure directe du flux, telle celle proposAe parBlashke en 1972, ont rapidement 4t4 abandonn4es [5].
I l'heure actuelle, on trouve principalement deux types de commande
.Les commandes avec contr61e direct du flux dans lesquelles le flux est d4termin4 parexemple h l'aide d'un observateur d'4tat plus ou moins sophistiqu4 [6, 7j. Ces commandes
imposent g4n4ralement un volume de calcul important, ce qui rend complexe leur im-
plantation num4rique.
.Les commandes avec contr61e indirect du flux dons lesquelles c'est une variable interm4-
diaire l14e au flux par un modAle de r4f4rence qui est command4e.
Ces deux strat4gies de commande font appel h un modAle de la machine. Elles sont donc
naturellement sensibles, hun
degr4 plus ou moins important, aux variations de valeur des
paramAtres de la machine (essentiellement la variation de la rdsistance rotorique avec la tem-
pArature, et dans une moindre mesure, celle des inductances avec la saturation).
4. #tude d'une version simplifi4e de la commande vectorielle indirecte du moteur
asynchrone
4.I. STRUCTURE ET CARACT#RISTIQUES PRINCIPALES DE LA COMMANDE LTUDI#E. La
commande reprdsentde sur la figure 2 est une commande vectorielle indirecte dans laquelle on a
introduit des simplifications similaires h celles utilis4es pour la commande du moteur synchroneprAsent4e h la rAf4rence [3j. Dans cette commande
:
[es termes de d4couplage et la vitesse du rAf4rentiel sont calculds au moyen des courants
et du flux de rAfdrence en supposant en outre que (ifird)ret est constant comme c'est gdndrale-ment le cas
[es courants statoriques i~d et i~q sont command4s au moyen de r4gulateurs associant une
action prAdictive avec une r4troaction proportionnellela vitesse est command4e au moyen d'un rAgulateur proportionnel associA h un observateur
de perturbations.

1044 JOURNAL DE PHYSIQUE III N°8
[~~~~isdmes
isqmes'
~(*rd)ret (isd)ref
~.'~
R~
Ub
~ ~~
Lsj
Rs
Wref~
CAPTEUR~
Ks'
~ s q refig~~i~yjNi
~m 0[s BICNAUXOUCAPTEUR
[coyyAN0[ __-------------~~~~~~~~
Fig. 2. Commande vectorielle simplifide.
(Simplified vector control.]
Les tensions de commande s'expriment comme 8uit :
ud= -aL~uJi~~~~, + Rsisd~~, + Kj(i~d~~, isd~» 16a)
~q j~~rdrc< ~ ~S~Sq,cf ~ ~~~sqr~< ~Sq,nm (~~)
avec
isdr~f " ~~rdr~f 16C)
isr~~~~ = ~c + Ko(Hic uJm) 16d)
uJ =PuJm+uJsr (6e)
UJsr =~/~ ~~~"' (6f)
rrdr~<
.L'emploi des valeurs de r4fArence des courants au lieu de leur8 valeurs mesurAes pour a88urer
le dAcouplage des deux axes et calculer la vitesse du r4iArentiel pr48ente [es avantages 8uivants
d4jh mentionnAs en [3jl'obtention de termes ayant un caractAre pr4dictif (puisque [es courants de r4fArence consti-
tuent en iait sur chaque pAriode d'4chantillonnage une pr4diction des courants dans la machine)
et dont la valeur n'est pas aflect4e par le bruit prbsent sur les mesures
une r4duction de la sensibilit4 du systAme aux erreurs 8ur le8 valeurs de8 paramAtres [8j.

N°8 COMMANDE DE MOTEURS ASYNCHRONES 1045
sq ret ~* U(s
K~
mesur6
Fig. 3. RAgulateur de courant associantune
action prAdictive et unerAtroaction.
(Simplified current controller.)
.L'emploi de rdgulateurs de courant comportant (Fig. 3) une action pr4dictive proportionnelle
au courant de rAf4rence et une action proportionnelle h la difl4rence entre la valeur de r414rence
et la valeur mesurAe du courant permet
de r4duire, comme dans le cas off on emploierait des r4gulateurs proportionnels dassiques,le temps de calcul environ de moit14 par rapport h l'utilisation de rAgulateurs PI [9j
d'obtenir, si on compense la f-c-e-m- d'axe q, des erreurs nulles en r#gime permanent (enl'absence d'erreur sur les paramAtres), ce qui ne peut Atre rAalis4 h l'aide de rAgulateurs propor-tionnels
mais aussi comme on le verra au paragraphe 4.2, d'obtenir une sensibilit4 du contr61e
du flux en boucle ouverte aux incertitudes sur l'estimation de la r4sistance rotorique et de
l'inductance mutuelle plus foible que celle obtenue lorsque [es courants sont r4gulAs au moyende rAgulateurs PI. La sensibilit4 du contr61e du flux h la r4sistance statorique qui apparait dans
le r4gulateur de la figure 3 est g4n4ralement trAs faible.
En annulant [es gains Kj (Fig. 2) qui fixent l'importance des termes de r4troaction dons
[es r4gulateurs de courant, on obtient une commande qui ne ndcessite plus aucune mesure
de courant, ce qui facilite encore son implantation. Les tensions de commande se simplifient
comme suit
ud= -aL~uJi~~~~~+l~~i~d~~, 17a)
Uq=
~~uJifird,
+Rsi~q,
(7b)M " ~~
Cette commande pr4sente n4anmoins, comme nous le montrerons dans [es paragraphes quisuivent, des performances suffisantes pour certaines applications off la constante de temps Alec-
trique (aL~/Rs) est de l'ordre de grandeur de la p4riode d'4chantillonnage du r4gulateur de
vitesse.
.Le r4gulateur de vitesse repose sur l'emploi d'un observeur de perturbations bas4 sur un
modAle de rAf4rence, H, du systAme command4, constitu4 par le moteur, sa commande rap-
proch4e et le systAme entr£n4 (Fig. 4) [10]. Cet observateur consiste h comparer une mesure
de vitesse avec une estimation de celle-ci (uJm =Hic), et h ajouter l'erreur ainsi obtenue h la
commande via un gain.
Comme la commande rapproch4e r4gule [es courants dans le moteur et donc le couple qu'ilddveloppe, en supposant que le flux dans la machine est (gal h sa valeur de r4fdrence, que le
d4couplage est parfaitement r4alisA et en n4gligeant le temps de rAponse des r4gulateurs de
courant ainsi que [es frottements dynamiques de la partie mAcanique, on d4duit de la figure 2

1046 JOURNAL DE PHYSIQUE III N°8
~
K~
0 oJmesur6
Fig. 4. Observateur de perturbations.
[Disturbance observer.]
que le modAle dynamique se r4duit h
L'exposant *indique
que[es grandeurs consid4rAes sont des aleurs estimAes des
arambtres.
Comme
H se r4duit h une action int4grale,le de vitesse proprement dit peut,
en r414rence [3j, Atre un mpleAgulateur proportionnel et la
solution
retenue est dquivalenteen terme de
'implantationh un rdgulateur PI, tout en prdsentant des
plus int4ressantes en ce quioncerne
sa robustesse is-h-vis desperturbations
(couple
4.2. SENSIBILIT# DE LA COMMANDE AUX INCERTITUDES SUR LA VALEUR DES PARAMITRES
Les stratAgies de commandes vectorielles utilisant un modAle de la machine pour contr61er le
flux sont sensibles aux erreurs d'estimation sur [es valeurs des rAsistances et des inductances
de la machine. L'eflet de ces erreurs sur le flux peut Atre d4termin4 en rAgime permanent. Des
Aquations ii) et (3), on dAduit, en r4gime permanent :
Ud"
R~i~d uJaL~i~q uJ)ifirq (9a)r
Uq=
uJaL~i~d + R~i~q + uJ~ifird (9b)Lr
~sd " ~~fird~°Jsr(~firq [9C)
isr~ =UJsr(ifird +
ifirr~.19d)
I partir des 4quations (9),en se rappelant que (ifirq)ret
=0 et ~ref
=(ifird)ret, on obtient des
4quations ayant la forme suivante :
Aifird jiifirq"
A*ifiref (10a)
jiifird + Aifirq "B"ifiref (10b)
Les valeurs des termes A et B d4pendent de la structure de la commande. L'exposant (~)indique un terme calculd avec des valeurs estimdes des paramAtres.
Dans cette 4tude nous nous int4resserons h la sensibilit4 de la commande aux erreurs d'es-
timation 8ur [es valeurs de8 paramAtre8 41ectrique8 de la machines. Pour eflectuer cette 4tude,

N°8 COMMANDE DE MOTEURS ASYNCHRONES 1047
nous supposerons que [es points de fonctionnement pour lesquels [es fonctions de sensibilit4
seront calculAes sont choisis en imposant [es valeurs de uJm et uJ =PuJm +uJ~r. Ces grandeurs ne
sont donc pas traitAes comme des variables au niveau de l'analyse, mais comme des paramAtresqu'on fera varier pour modifier le point de fonctionnement.
La dAtermination des termes A et B donne
.Lorsque [es courants i~d et i~q sont command4s par [es rAgulateurs de courant propos4s
associant une action prAdictive et une action proportionnelle (Fig. 2), on obtient en r4gimepermanent
Ud"
~~~Ll~isq~e' + RI isd~~, + I[isdrc' isdmm Ii i~L)
~*~q j/w °~~r~f ~ ~~~Sq~~< ~ ~
~~~qm< ~~qmm ~~ ~~~
avec
~sd~c, @~firef ~~~~)
j~*r
~fiji~~)
~sq~c< °~S~fit* j~* ~~f'
r
En introduisant l'Aquation (12) darts ii1), et ii1) darts les relations (9a) et (9b), et en 41iminant
[es courants i~d et i~q dans [es 4quations (9), on obtient
A=
(R~ + Ki uJuJsr~ j)~ (13a)
B"
jl~sr)lRs+Ki)+~Ls). l13b)
.Lorsque les courants sort commandAs au moyen de r4gulateur PI, on obtient en rAgime
permanent
isd= isd~~, = ~ifiref (14a)
~*
~Sq %Sqrd °~Sr~
~j ~firef' ~~~)
Les expressions (14) sont en fait valables pour tout r4gulateur de courant comprenant une
action int4grale, avec ou sans d4couplage, car on considAre une situation de r4gime permanent.En introduisant (14) dans (9c) et (9d), on obtient
A=
(15a)
B=
uJ~r(. (15b)
II faut noter que [es expressions (15) sont ind4pendantes de la vitesse m4canique.
I partir des expressions (10), on peut d4terminer l'erreur sur I'amplitude du flux ~r
~fi
filli ji~)
~firef ~firef A~ + ji~

1048 JOURNAL DE PHYSIQUE III N°8
et I'Acart angulaire de position entre Ie flux ifir et Ie flux de rAf4rence (ifird)ret
Le couple 4lectromagnAtique rAellement d4veloppA par la machine vaut
Sans erreur sur [es paramAtres, A*=
A et B*=
B, [es expressions (16) h (18)se r4duisent
alors h ifir " ~firef, P "0 et TEM
" (bJsr/Rr)~fi~ef'Dans la suite de cet article, [es erreurs sur l'amplitude et sur l'orientation du flux sont
calculAes pour des points de fonctionnement correspondant h une vitesse de rotation uJm et un
couple 4Iectromagn4tique TEM donn4s. Ceci revient h dire que nous imposons h uJ~r de prendre
comme valeur la valeur qui est racine de I'Aquation (18). Cette valeur est obtenue en r4solvant
num4riquement l'4quation en question.Les figures 5, 6 et 7 fournissent, pour la machine dont [es paramAtres sont donn4s en annexe,
la sensibilit4 de I'amplitude et de l'orientation du flux, en fonction du couple AIectromagn4tique,
pour difl4rentes erreurs sur [es paramAtres et pour difl4rentes strat4gies de commande.
La sensibilit4 Sa de l'amplitude du flux et la sensibilit4 So de l'orientation du flux sont dA-
termin4es comme suit
Pour la figure 5Aifir
SaM"jet
SCM"fi.I M~
Pour la figure 6 :
/hifir
SaRr"
jet SoRr
"
~.i
Rj~
Pour la figure 7~ifir
SaRs"
jet SOR~ "
~.( R]
Les figures 5a, 6a et 7a correspondent h une vitesse nulle, [es figures 5b, 6b et 7b correspondenth une vitesse de 1500 tours /min. Les courbes en traits continus sont calculAes h partir des ex-
pressions (15) (courants r4guIAs au moyen de rAgulateurs PI). Les courbes en traits discontinus
sont calcu14es h partir des expressions (13) avec Ki=
5, tandis que [es courbes en traits-pointssont calculAes h partir des expressions (13) avec Kj
=0 (commande
sons mesure des courants).II convient de signaler que si une erreur d'estimation e8t introduite 8ur la valeur de M, cette
erreur affecte 6galement le8 parambtres L~ IL(=
M* + if~) et Lr (L)=
M* + ifr).Les figures 5 h 7 montrent que Ies erreurs sur Ie flux sont g4n4ralement plus faibles quand
[es courants sont commandds par des rAgulateurs associant une action prddictive avec une
r4troaction proportionnelle plut6t que par des r4gulateurs PI. Cependant, dons ce dernier cas,
une erreur sur la r4sistance statorique Rs n'a 4videmment aucune influence sur la valeur du

N°8 COMMANDE DE MOTEURS ASYNCHRONES 1049
Sensibilitb Sa k M (Wmin) Sensibilitb Sa k M (150O#min)I
', 0,8',',
' O,6w ', ', w~
', ',, ~O~4
0 0~5 1,5 2 0 0~5 1,5 2
Couple lNm] Couple [Nm]
Sensibilitb So k M (O#min) Sensibilit6 So k M (150O#min)
-o,i -o,i
g i qr
K 'i i~8 "°>3 ',' 8
',
~oj , '/',
/_
0,5 1,5 2 0 0,5 1~5 2Couple [Nm] Couple [Nm]
Fig. 5. Sensibilitd de l'amplitude et de l'orientation du flux aux erreurs sur M. Courbesen
traits
continus: courants rdgulds par PI. Courbes
en traits discontinus: courants rdgulds par des rdgulateurs
associant une action prddictive et une action proportionnelle (K~=
5). Courbes en traits-points :
commande sans mesure de courants (K~=
0).
[Flux amplitude and orientation sensitivity when there is an error on M. Curves in full lines: currents
controlled by PI. Curves in dashed lines: currents controlled by controllers associating afeedforward
and a proportional action (Ki=
5). Curves in dashdot lines: controller without current measurement
(K,=
0).]
flux en rAgime permanent. II iaut toutefois noter que l'eflet d'une erreur d'estimation sur la
valeur de Rs reste foible et d4croit rapidement avec la vitesse. En outre, le paramAtre Rs est
un des paramAtres [es plus aisAs h dAterminer.
La comparaison des courbes en traits discontinus et en traits-points des figures 5 h 7 montrent
l'influence de la valeur du gain Kj, sur la valeur rAeIIe du flux. Une valeur AlevAe du gain Kjn'oflre un avantage Avident qu'en pr4sence d'une erreur sur Rs. En fait, si Ie gain Kj tendait vers
l'infini, la sensibilitA du contr61e du flux lorsque [es courants sont commandAs par le rAgulateurproposA h la figure 3 tendrait vers la sensibilit4 obtenue lorsque [es courants sont command4s
par des r4gulateurs PI.
Mais, compte tenu du caractAre discret des rAgulateurs numAriques, le gain Kj doit rester
inf4rieur h une valeur maximum au~delh de laquelle la stabilit4 n'est plus assur4e comme le
montre l'4tude eflectu4e h la rAfArence [13]. Une valeur Alev4e de Ki correspond h une valeur

1050 JOURNAL DE PHYSIQUE III N°8
sensibilitb sa k Rr jwmin) Sensibilit4 Sa k Rr (l50Wmin)
_
-0,4
w m~o to
0 0,5 1,5 2 ~0 0~5l ,5
2
~
Couple [Nm]
' o~lem]
Sensibilwb So k Rr (0Vmin) Sensibilitb So k Rr (150O#min)
/~~~-~ 0,/
~ ~~
~/"~'-~~
o~"~
o~o ~o
o~i o,1
0 0~5 1,5 2 0 0,5 1,5 2
Couple [Nm] Couple [Nm]
Fig. 6. SensibilitA de l'amplitude et de l'orientation du flux aux erreurs sur R~. Courbes en traits
continus: courants rAgulAs par PI. Courbes en traits discontinus
: courants rdgulAs par des rAgulateursassociant une action prddictive et une action proportionnelle (K~
=5). Courbes en traits-points
:
commande sans mesure de courants (fi~=
0).
[Flux amplitude and orientation sensitivity when there is an error on R~ Curves in full lines: currents
controlled by PI. Curves in dashed lines: currents controlled by controllers associatinga
feedforward
anda
proportional action (K~=
5). Curves in dashdot lines: controller without current measurement
(K~ =0)].
proche du gain correspondant h la limite de stabilit4 (par exemple pour le systAme consid4r4
Ki~,~=
lo si la p4riode d'4chantillonnage est de 0,6 ms).L'4volution de la sensibilit4 du contr61e du flux aux incertitudes sur [es paramAtres lorsque
[es courants statoriques sont commandAs au moyen de r4gulateurs proportionnels dassiques e8t
4tud14e dan8 la r4fArence [13]. La sensibilit4 du contr61e du flux est trAs Alev4e dans ce cas.
4.3. VALIDATION DES PERFORMANCES PAR SIMULATION NUM(RIQUE. Le comportementde la commande simplifi4e pr4sent4e sur la figure 2 a 4t4 simu14 num4riquement, pour la ma-
chine asynchrone dont [es paramAtres sont donn4s en annexe, en considdrant que le rdgulateurnumArique travaille avec une pdriode d'dchantillonnage et un retard dfi au temps de calcul de
2 ms au niveau de la rAgulation de vitesse et de position,
et de 0,5 ms au niveau de la r4gulation des courants.

N°8 COMMANDE DE MOTEURS ASYNCHRONES 1051
Sensibilit6 Sa k Rs (0tlmin) Sensibilit6 Sa k Rs (150O#min)
',
___-------- , ',,
, ,,
m ,,to ,~,
,0,6_,
'~,,' '
,0j8 ,1' '§,/
,
/ ,.1
0 0~5 1~5 2 0 0,5 1,5 2
Couple [Nm] Couple [Nm]
Sensibilit6 So k Rs j0tlmin) Sensibilitb So k Rs jls00tlmin)
~0,01
0>5 1~5 2 0 0,5 1,5 2Couple lNm] Couple [Nm]
Fig. 7. Sensibilit4 de l'amplitude et de l'orientation du flux aux erreurs sur Rs. Courbes en traits
discontinus: courants rAgulds par des rAgulateurs associant une action prAdictive et une
action propor-tionnelle (K;
=5). Courbes en traits-points
:commande sans mesure de courants (K,
=0).
[Flux amplitude and orientation sensitivity when there is an error on Rs. Curves in dashed lines:
currents controlled by controllers associatinga
feedforward anda proportional action (K,
=5). Curves
in dashdot lines: controller without current measurement (K,=
0).]
La figure 8 prAsente la r4ponse du systAme h un 4chelon de consigne de vitesse et h l'appli-cation d'un couple rAsistant (gal au couple nominal de t
=1 s h t
=1, 5 s.
a) Lorsque le gain Ki des rdgulateurs de courant vaut 5.
b) Lorsque Kj=
0 (commande sans mesure de courant).c) Lorsque [es rdgulateurs proposds sont remplacds par des rdgulateurs PI.
La comparaison des figures 8a, 8b et 8c montre que la suppression des rdtroactions de courant
aflecte peu la rdponse de la machine (car la constante de temps dlectrique aL~ /Rs a une valeur
trAs proche de la pdriode d'dchantillonnage du rAgulateur de vitesse), et que l'utilisation de
rAgulateurs PI ne modifie pas de maniAre sensible [es performances. Ces simulations montrent
4galement que, grice h l'introduction d'un observateur de perturbations dans la boucle de
vitesse, le systAme est "quasi" insensible aux Achelons de couple rAsistant appliquds h la machine.
Des rdsultats de simulation obtenus en considArant des erreurs sur les paramAtres Alectriquessont prdsentAs dans [es r4fdrences [13,14]. Ces rdsultats valident l'Atude th40rique prAsentdedans le paragraphe 4.2.

1052 JOURNAL DE PHYSIQUE III N°8
VRUW [Vnfin] Vkesse [Vnin]
o o,2 O,4 o,6 0,8 1,2 1,41,6 1,8 2 o o,2 o,4 O,6 O,8 1,2 1,4 1,61,8 2 o o,2 o,4 0,6 o,8 1,21,4 1,6 1,8 2
g~mj
romps [s] romps [s]
0 o,2 o,4 0,6 0,8 1,2 1,4 1,6 1,8 2 0 0,2 o,4 o,6 o,8 J,2 1,41,61,8 2 0 O,2 0,4 o,6 0,8 1,2 1,4 1,61,8 2
Fig. 8. Simulation du comportement dynamique du systbme.
[Simulation of the dynamic behaviour of the system.]
__________________-__-__-_-------------------~[F££fly4floN or w
~~
P
oi iq
,
,
j
i
,,
'
r, ' AGfIONNIUR
ud,
P0S ~ ~~
REGU,
,
~P°S.
oPflQoE,'
p
d
dt
, i
«Pi [d______________________--_------------]
Fig. 9. Vue sch6matique de l'implantation de la commande sans mesure de courant.
[Schematic diagram of the hardware implementation.]

N°8 COMMANDE DE MOTEURS ASYNCHRONES 1053
Dans la r4fArence [8j, on montre, au moyen de simulations, que l'emploi des valeurs mesurdes
des courants pour assurer le dAcouplage des deux axes et calculer la vitesse du rAidrentiel dans
le cas Ki=
0, iournit une commande beaucoup plus sensible aux variations de la rdsistance
rotorique que lorsque l'on utilise des valeurs estimdes de ces courants.
4.4. IMPLANTATION ET ESSAIS. Une implantation de la commande sans mesure de courant
(Kj=
0, Fig. 2) a dtd eflectude sur un support matdriel identique h celui utilisd pour com-
mander un moteur synchrone h aimants permanents (Fig. 9) pr4sentd h la rdfdrence [3j. II est
constitud de deux microcontr61eurs 8 bits INTEL MCS8051.
Le premier microcontr6Ieur supporte Ies algorithmes:
de traitement des signaux provenant du capteur de position (en l'occurence un encodeur
optique) [15]de rdgulation de vitesse et de position.
II iournit au deuxiAme microcontr6Ieur la vitesse de rotation et la valeur de la tension Uq.Le calcul de cette tension est eflectud en tenant compte de la valeur maximum admissible pour
Ie courant isq.
Le deuxiAme microcontr6Ieur dAtermine la tension Ud et eflectue la transiormation inverse de
Park ndcessaire h la gdnAration des signaux de commande de l'onduleur alimentant le moteur
[16].
Afin d'obtenir une prdcision suffisante sur [es paramAtres et [es variables intervenant dans
la commande, des routines mathdmatiques permettant de manipuler des nombres en virguleflottante (comportant 8 ou 16 bits de mantisse suivant la prdcision dAsirAe et 8 bits d'exposant)
ont dtd ddveloppdes [3].
La figure 10 prdsente Ies rAponses expArimentale et thdorique du systAme connectd h une
charge inertielle (J=
1,2 x10~~ kg m~) h un 4chelon de la consigne de vitesse suivi de
l'application d'un dchelon de couple rdsistant Aquivalent au couple nominal de la machine.
Grice h l'introduction d'un observateur de perturbation dans la boude principale de rAgulation(position-vitesse), le systAme est quasiment insensible aux variations du couple r4sistant.
La figure 11 prdsente [es rdponses exp4rimentale et thdorique du systAme h un dchelon de
la consigne de position. Bien que la sensibilitd du rdglage du flux aux incertitudes sur Ies
paramAtres soit plus grande h basse vitesse, Ie comportement de la machine est tout h fait
satisfaisant.
5. Conclusion
Dans cet article, nous avons prAsentA unecomminde numArique simpIifi4e d'un moteur asyn-
chrone de foible puissance.
En comb1~lant de maniAre judicieuse des actions pr4dictives et des rAtroactions au niveau des
algorithmesde r4guIation de la vitesse et de la position,de r4gulatio~l des courants
et de d4couplage,

1054 JOURNAL DE PHYSIQUE III N°8
Vitesse ltours/min)
iemps (s)
o
courant (Al
Temps lsl
o i
a) Rdponse expdrimentale.
0 0,2 0,4 0,6 0,8 1,2 1,4 1,6 1,8 2
Courant[A]
0 0,2 0,4 0,6 0,8 1,2 1,4 1,6 1,8 2
b)Rdponse th40rique.
Fig. lo. RAponses expArimentale et thAorique du systAme I un Achelon de la consigne de la vitesse
suivi de l'application d'un dchelon de couple rdsistant.
[Experimental and theoretical responses of the system to a step in the speed reference followed bya
step of load torque.]

N°8 COMMANDE DE MOTEURS ASYNCHRONES 1055
Position (Red] Vitesse (t0urS/mini100
iemps Is) iemps (sl
0 2 o 2
Courant (Al
Temps (s)
i
a) Rdponse exp6rimentale.
Position ~llad] Vitesse [tours/ndn]
0 0,5 1,5 2 0 0,5 1,5 2
Courant [Al
i
-1
-3
~Temps [s]
0 0,5 1,5 2
b)R6ponse thAorique.
Fig. ii. Rdponses expArimentale et thdorique du systAme h unAchelon de la rdfArence de position.
[Experimental and theoretical responses of the system to a step in the position reference.]

1056 JOURNAL DE PHYSIQUE III N°8
cette commande se caract4rise par
une simplicit4 compatible avec son implantation sur des microcontr61eurs 8 bits ayant une
puissance de calcul limit4e, tel le MCS8051 que nous avons utilis4
un niveau de performance satisfaisant mis en 4vidence par des 4tudes thdoriques, des simula-
tions numAriques et des essais sur [es prototypes de laboratoire que nous avons dAveloppds.
Annexe
ParamAtres de I'actionneur testA.
Puissance nominale: 0,25 kW
Vitesse nominale: 1800 tours /min.
Rs=
1, 923 Q J=
4 x10~~ kg m~
llr=
1, 739 Q K=
2, 5 x10~~ Nm s
rad~~
L~=
0,1157 H
Lr=
0,1154 H
M=
0,1126 H
Bibliographie
iii Leonhard W., 30 years space vectors, 20 years field orientation, 10 years digital signalprocessing with controlled AC-drives, a review, EPE J. I n°1 (juillet 1991) et n°2 (octobre
1991).
[2] Dhers J., Godfroid M. et Sanhet J.L., Vitesse variable des machines h induction. Structure
des convertisseurs et commande vectorielle, RGE n°5 (1992) 134-147.
[3] Robyns B., Fu Y., Labrique F. et Buyse H., Commande numArique de moteurs synchronesh aimants permanents de faible puissance, J. Phys. III France 5 (1995) 1255-1268.
[4] Leonhard W., Control of electrical drives (Springer Verlag, 1985).
[5j Blaschke F., The principle of field orientation as applied to the new transvektor closed-loopcontrol system for rotating field machines, SieYnens Review 34 (1972) 217-220.
[6j Verghese G-C- and Sanders S-R-, Observers for flux estimation in induction machines,IEEE Trans. Indw. Electron. 35 (1988) 85-94.
[7] Roboam X., Hapiot J-C-, De Fornel B. and Andrieux C., Definition and realization of a
rotor flux observer. Application to a speed drive for asynchronous machine, Proceedingsof IMACS-MCTS (Lille, mai 1991) pp. 280-286.
[8] Robyns B., Labrique F. and Buyse H., Performance analysis of a simplified indirect
field oriented control algorithm for small power induction actuators, Math. and GoYnp.
in SiYn~iation 38 (1995) 389-398.
[9] Louis J-P- et Bergmann C., Commande num4rique des ensembles convertisseurs,machines,RGE, n°5 (1992) 124-133.
[10] Robyns B., Galardini D., Gorez R., Labrique F. et Buyse H., Asservissements de vitesse
d'un actionneur asynchrone par modAle de l'actionneur et de sa commande vectorielle,Actes des Journ4es d'#tudes de la SEE sur [es Asservissements #lectrom4caniques Ra-
pides Mod41isation et R4gulations Avanc4es (Metz, 21-22 octobre 1992) pp. 43-51.
N°8 COMMANDE DE MOTEURS ASYNCHRONES 1057
[11] Gorez R. and Galardini D., Robust positional control ior robotic applications, Actes du
2~ CongrAs National Belge de M4canique ThAorique et AppliquAe (Bruxelles, 17-18 Mai
1990) pp. 189-192.
[12] Gorez R., Galardini D. and Zhu K-Y-, Internal model control and disturbance observer,Proc. of the 30th IEEE-CDC (Brighton 1991) pp. 229-235.
[13] Robyns B., Fu Y., Buyse H. and Labrique F., Flux control performance of an induction
motor indirect FCC using a simplified current control strategy, Proc. of ICEM'94 vol. 2
(Paris, septembre 1994) pp. 374-379.
[14] Robyns B., Buyse H. and Labrique F., Comparison of the sensitivity of the flux control to
parameter uncertainties in two induction actuator indirect field oriented control schemes,Proc. oi the sth European Conierence on Power Electronics and Applications, EPE'93
(Brighton, 13-16 septembre 1993) pp. 402-407.
[15] Sente P. and Buyse H., From smart actuators to smart sensors: Application of digitalencoders for position and speed measurements in numerical control systems, MeamreYnent
15 (1995) 25-32.
[16j Sente P. et Buyse H., Modulateur h largeur d'impulsion pour onduleur h commande numb
rique vectorielle 6~ Colloque sur le Positionnement incr4mental par entr£nement 41ectrique(Lausanne, 5-6 Juillet 1990) pp. 101-112.