Collimator Controls - CERN Indico
29
Collimator Controls • Readiness of collimators control – from bottom to top • State of automated collimator positioning Extended LTC Session 6 - Readiness of Controls Friday 07 March 2008 14h30 2008/03/07 MJJ
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Collimator Controls - CERN Indico

Collimator Controls
• Readiness of collimators control – from bottom to top• State of automated collimator positioning
Extended LTCSession 6 - Readiness of Controls
Friday 07 March 2008 14h30
2008/03/07 MJJ
Collimator Controls
Primary Actors(from bottom – to top)– Alessandro Masi, Mathieu Donze, Arnaud Brielmann, Jerome Lendaro,
Roberto Losito
– Jacky Brahy, Enrique Blanco Vinuela
– Guy Surback, Roland Chery, Nicolas Zaganidis
– Stefano Redaelli, Eric Veyrunes, Delphine Jacquet
Support from LSA team, AB/CO-DM, M.Lamont

Outline
Installation status
h lArchitecture evolution
Functional Status• Environmental Survey
• Positioning & Survey
• Application LayerApplication Layer
Automatic Collimator Positioning (Beam Based Optimisation)

Baseline Architecture (as decided in 2005)
Control roomCentral Collimation Application
Ethernet
Controls Network Data Base
Actual Machine Parameters
Data Base Machine Timing
Control room software:• Management of settings (LSA)• Preparation for ramp• Assistance in collimator tuning
Surface support buildingBLM system
Critical SettingsMachine Timing
Machine Timing Distribution
g– Based on standard LSA components– Dedicated graphical interface for collimator control and
tuning– OP responsibility
C lli t S i S t (CSS)
Underground low radiation area
Collimator Supervisory System(one or two per LHC point)
Synchronisation
Collimator Supervisor System (CSS):– Environmental Supervision through standard PVSS class– Support building, VME / FESA
• Fesa Gateway to Control Room Software• Synchronization of movements
B B d Ali t i itiUnderground, low radiation area
Fan out
• Beam Based Alignment primitives• Takes action on position errors (FB)
– Receives timing, send sync signals over fiber to low level (Ramp & Beam Based Alignment)
– Synchronization and communication (udp) with BLM– CO responsibility
Local Ethernet Segment
Motor Drive Control
PXI
Position Readout and Survey
PXI
Environment Survey
PLC
LHC tunnel
Beam Permit
– CO responsibility
Low level control systems– 3 distinct systems
• Motor drive PXI • Position readout and survey PXI . . . • Environment Survey PLC
– ATB responsibility & CO for Environment

HW Installation status
Today some 75 Collimators are installed.
b l !== 92 by April !
Details in talk of O.Aberle

HW Installation status
Temperature readoutAll PLC’ i l– All PLC’s in place
– All installed collimators t dconnected
– All temperature gauges tested except in IP7tested except in IP7
• Very few surprises
• IP7: waiting for 220VIP7: waiting for 220V power connections

HW Installation statusPXI installation– All PXI systems installed
– Test in progress: stages• Pre-Commissioning
– Test signal connectivity
– No motor movement
– All done (IP7 finished yesterday)
• Commissioning 1Requires tunnel access for visual confirmation of– Requires tunnel access for visual confirmation of mechanical movements, swichtches etc.
– IP5, IP6 in progress, followed by IP2, IP8, IP1 (constrained by tunnel access), then IP3, IP7.
– First LVDT-CalibrationFirst LVDT Calibration
• Commissioning 2– Remote tests
– Including PC-gateway & synch-signal
– LVDT-reCalibration, autoretraction, mechanical play
– Finished by last week of May

HW Installation status
CSS related hardware– PC Gateways installed in all points except BA7
– Fibers connectivity for synchronisation signals:
• Ready in IP1, IP2, IP3, IP6, IP7• IP8, IP5 before end of March

Temperature monitoring
Based on standard UNICOS / PVSS control environmentPLC programs automatically generated from excel filesPLC supervised by standard PVSS server
PVSS ClientPVSS Client
J Cli
PLC programs automatically generated from excel files(excel files are extracted from Collimation Configuration tables in the DBwith additional dump and alarm limits per temperature sensor
PLC supervised by standard PVSS server• Internal store (Months of data)• Feeds various clients (LoggingDb, Alarm, JapC, Configurable PVSS clients,)
Japc ClientsJapc Clients
Japc ClientsJapc Clients
Collimation Configuration
PVSSServer Alarm System
Logging DB
y
PLC PLC PLC

Temperature monitoring
Configurable PVSS clients

Architecture Evolution
Central Collimation Application
Ethernet
Controls Network Data Base
Actual Machine Parameters
Data Base Machine Timing
Central Collimation Application
Ethernet
Controls Network Data Base
Actual Machine Parameters
Data Base Machine Timing
Only considering Position control: 3 Layers
For various reasons (responsibility delimitation) the architecture grew more complex with 4 layersCritical Settings
Machine Timing
Machine Timing Distribution
Critical SettingsMachine Timing
Machine Timing Distribution
architecture grew more complex with 4 layers.
A low level Fesa Server was introduced• Longer Execution Path• More resources, more maintenance
Collimator Supervisory System(one or two per LHC point)
Synchronisation
Collimator Supervisory System(one or two per LHC point)
,• Duplicated functionality• For not much benefit• And a complication for MCS
Fan out
Local Ethernet Segment
Motor Drive Control
PXI
Position Readout and Survey
PXISynchronisation
Low Level Fesa(one or two per LHC point)
Low Level Fesa Server taking more and more responsibility (calibration, expert access, …)
What is the solution ?
Beam Permit
Fan out
Local Ethernet Segment
Motor Drive Control
PXI
Position Readout and Survey
PXI
Make Low Level Fesa Server to implement the same property interface as CSS
Suggest to include also synchronisation control in the Low Level Fesa Server
Low Level Fesa
CSS
Beam Permit
in the Low Level Fesa Server.

Architecture (as evolved after 2007 runs)
Central Collimation Application
Ethernet
Controls Network Data Base
Actual Machine Parameters
Data Base Machine Timing
ATB kindly agreed to include the synchronisation control in the Low Level Fesa
Low Level Fesa Server became de facto the CSSCritical Settings
Machine Timing Low Level Fesa Server became de facto the CSS
Central Collimator Application can (almost) talk directly to ATB CSS implementation as if it was the CO CSS implementation
Many thanks to A.Masi for this 2007 Christmas present.
Machine Timing Distribution
Synchronisation
Collimator Supervisory System(one or two per LHC point)
Fan out
Local Ethernet Segment
Motor Drive Control
PXI
Position Readout and Survey
PXI
Beam Permit

Architecture (to be completed in 2008)
Central Collimation Application
Ethernet
Controls Network Data Base
Actual Machine Parameters
Data Base Machine Timing
ATB kindly agreed to include the synchronisation control in the Low Level Fesa
Low Level Fesa Server became de facto the CSS
Optimisation Application
Critical SettingsMachine Timing Low Level Fesa Server became de facto the CSS
Central Collimator Application can (almost) talk directly to ATB CSS implementation as if it was the CO CSS implementation
BLM system
Missing functionality
• CSS is now reporting asynchronously to t (i k f St f )
Beam Based Optimisation(one or two per LHC point)
Machine Timing Distribution
Synchronisation
requests. (i.e. more work for Stefano).
• Beam Based optimisation primitives not provided
N d i d d h
Collimator Supervisory System(one or two per LHC point)
Fan outNeed an independent process that runs on the PC gatewayLocal Ethernet Segment
Motor Drive Control
PXI
Position Readout and Survey
PXI
Beam Permit

PXI and CSS
All functionality defined and ~implemented on PXI(except multi movement option for fast optimisation)(except multi movement option for fast optimisation)
Merge of Fesa Servers
Expert application for LVDTExpert application for LVDT-Calibration• Interacts with Fesa Server to calibrate• Calibration stored in MCS• Calibration stored in MCS• Updates under control of RBAC
Fesa device delivery tool• Takes information from• Takes information from
• Collimation Configuration DB• PXI configuration DB
• Feed Fesa Configuration DB

PXI: Tracking Jaw PositionsSetting
Reading
50 μm 20 sGenerally excellent resolution and performance.
In the tunnel at some locations pickup noise.
20 s 50 μmBeing analyzed.
Setting
10 μm
Reading
20 s
RWA, LHC MAC 12/07 15
S. Redaelli

PXI and CSS
To be finalized and testedF i d i i• Function driven execution
• Machine protection functionalityi d li i• Warning and Dump limits
• Machine Protection limits (MCS) depending on Energy
• Synchronisation• Synchronisation
• Reception of Energy and other Machine Parameters
I t ti ith li ti l (t i d S )• Interaction with applications layer (trim and Sequencer)
New functionality to be commisioned in April.• Actual priority is HW commissioning in the tunnel.

Application Layer
Stefano has provided a lot of work in collaboration with Eric and Delphinewith Eric and Delphine
• Database Table definitions to store collimator configuration• WEB interface• WEB interface
• Collimator configuration database population
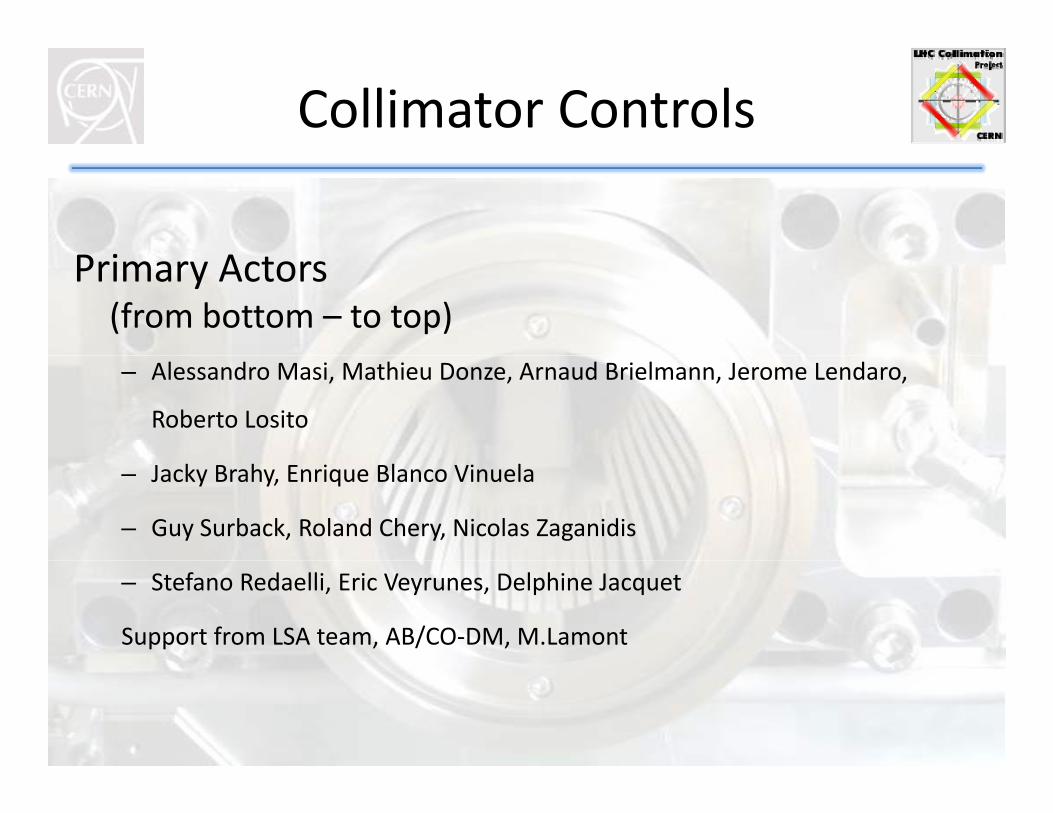
• Collimator Control Application
• Definition of parameter space to control collimators settings and limits.
Ad t ti f t i dit ( ith CO/AP) t i li• Adaptation of trim editor (with CO/AP) to visualize more conveniently the collimators following the Beam-IP-family hierarchy

Collimation Configuration
18
Collimator Control Application
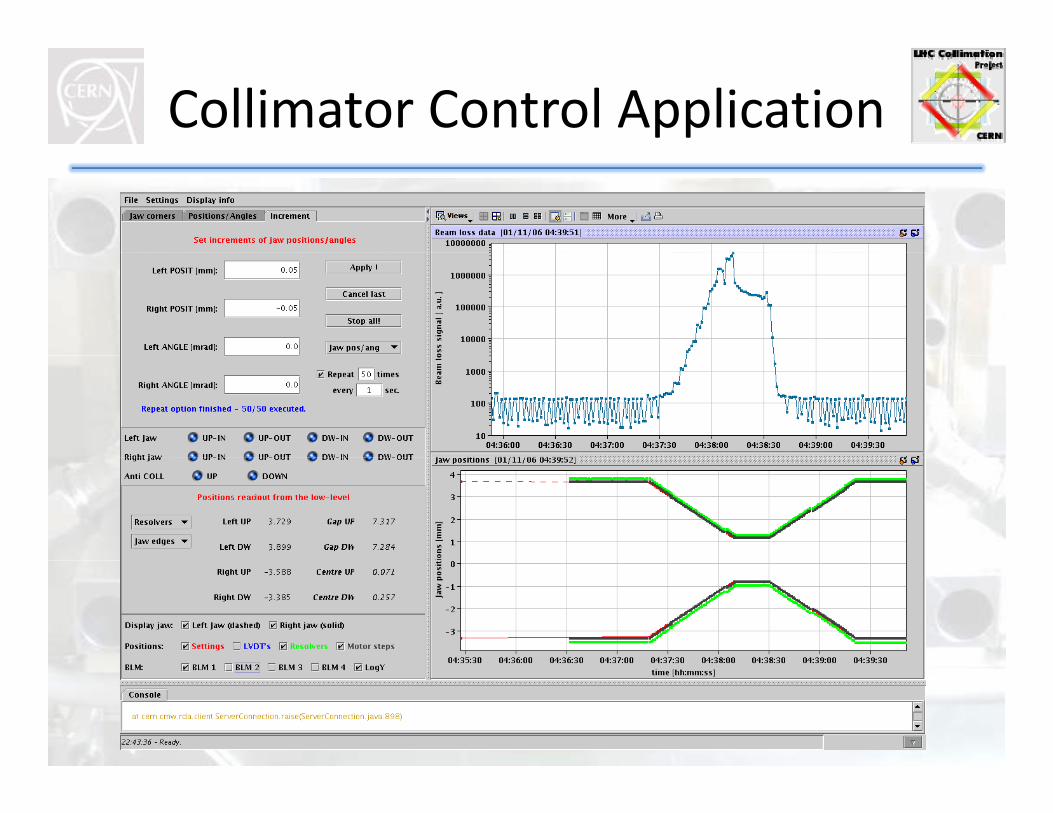
Collimator Parameter Space
High level Trim parameter is expressed in Nσ
Absolute values are obtained by folding in the beam based σbeam XXbeam
σbeam is obtained from Momentum, εbeam and βcoll.beam βcoll
• εbeam is the nominal emmittance for which the machine is protected. It is a collimator specific parameter. Measured ε must be < εbeam
• βcoll can be trimmed based on beam based alignment, to correct for local β−beatingβ g
Same hierachy for warning and dump limits.

Collimator Function Trim

Automated Collimator Positioning
94 (up to 160 in final upgrade) collimators, to protect against machine damage and magnet
quenches.
The collimation process is a multi-staged process that require precise (0.1 σbeam) setting of the
jaws with respect to the beam envelope.
Goal for positioning accuracy is ≈20 μm (0.1 σbeam at 7 TeV).Goal for positioning accuracy is 20 μm (0.1 σbeam at 7 TeV).
Actual beam envelope (position and size) may change (from fill to fill ?, by how much?)
Adapt to changing beam parameters to guarantee machine protection and to keep good
l i ffi icleaning efficiency
There are 376 degrees of freedom (4 motors per collimator) (188 if not considering the angle of the jaws)
12 minutes for two positions
30 seconds per degree of freedom (a very efficient operator) still requires about 3 hours.
⇒ We need automated tools and procedures⇒ We need automated tools and procedures
by Chiara Bracco

Beam ProbingTraditional method to establish the beam position, angle and size by touching the actual
beam. (Required with new optics or after substantial changes of beam parameters)
– Starts with producing a well-defined cut-off in the beam distribution.
Beam Loss Monitor Beam Loss Monitor
Starts with producing a well defined cut off in the beam distribution.
– Each collimator jaw is moved until the beam edge is touched. This step defines an absolute reference position for each jaw. (and angle if two motors are moved independently)
Note: Best done from the last element in the cleaning insertion to the firstNote: Best done from the last element in the cleaning insertion to the first• Collimators may stay in place• Machine is better protected against quenches
Disadvantages:• Only possible with low intensity beam (i.e. 5 bunches, extrapolation from 5 to 3000 ??).• Slow if done manually (188 positions )• Delicate (e.g. moving a collimator too far changes the cut-off in the beam distribution).

Fast beam based setupComplements the traditional set-up method (possible with nominal beam intensity).
Adjust positions to reproduce known beam loss pattern.– Based on experience of other accelerators:Based on experience of other accelerators:
Collimation efficiency is more closely related to beam loss patterns than to absolute collimator positions, which are sensitive to orbit deviations, beta beat, etc.
Move jaws in hierarchical order into the beam halo up to the point where a specified beam loss level is recorded in the adjacent beam loss monitors
Beam Loss Monitor Beam Loss Monitor
recorded in the adjacent beam loss monitors.
• Fast if implemented as an automated procedure:– Start at a fixed offset relative to a previously known position (only have to move short– Start at a fixed offset relative to a previously known position (only have to move short
distances, no need to be retracted.– Two beam can be tuned in parallel in the two cleaning insertions IR3 and IR7

Fast beam based setupProcedure in practice:The collimators are set at 1.5 σ retracted with respect to the last optimised value.p p
The jaws are optimised one by one in a precise order.
Optimization by moving in steps of 0.05 σ until the associated set of Beam Loss Monitors (BLM) detects a predefined value of beam lossMonitors (BLM) detects a predefined value of beam loss.The BLM reference levels are found empirically and may be updated from fill to fill.
Timing implications:Starting position –1.5 σ, step size of 0.05 σ (≈50 μm @ 450 GeV)⇒ 30 steps/motor ⇒ 9600 steps in total (only position, no angles, final upgrade).
Available time 5 min. two rings in parallel ⇒ 60 ms per step (16 Hz)
@ 2mm/s 50 μm ⇒ 25 ms per step needed for motor movement@ / μ p p=> 35 ms for driving, data collection, reading BLM, deciding

Fast Optimisation PrimitivesCollimator Supervisory System (CSS)– Send a trigger to adjacent BLM system
on every motor movement
BLM system
on every motor movement– BLM system sends a short “transient”
data to the CSS– Optimization primitive command (on CSS)
Collimator Supervisory System(one or two per LHC point)
SynchronisationMove until BLM-levelParameters• Motors and step size• BLM signals and limits
Synchronisation
Fan outLocal Ethernet Segment
g• Repetition frequency• Maximum steps
– Example:Move Jaw-left in steps of 10 um every 30 ms
Motor Drive Control
PXIPosition Readout and Survey PXI
Beam Loss Monitor Move Jaw-left in steps of 10 um every 30 ms until BL signal reaches 103
This optimization primitive can be used by a central application for
Beam Loss Monitor
a central application for– Beam Probing– Fast beam based optimization

The real chalenge
Motor movement 10ms (20μm)
During the SPS MD, not able to make clean cut in the beam distribution
Beam-dynamics: Re-poppulatution of tails over several 100th of ms.
Long tails after collimator movement,
Large noise components
Motor movement 50ms (25μm)
(70 Hz)12 secLarge noise components
50, 150, 300, 450 &
600 Hz noise
Loss tails with echo
If these effect are also present in the LHC, optimisation will me more challenging.

Fast Optimisation Implementation
To be developed this year.• Implement Multi Step movements at Low Level• Implement Multi-Step movements at Low Level• Development of Optimiser Process
− Beam Based Optimisation Primitivel d f l f d ll− Already useful for operator assisted collimator setup.
• Development of Central Optimisation Control Process− Sequencing the optimisation of the individual jaw positions− Driven by a DB configuration, able to react intelligently if there is
unexpected behaviour.− Initially simple, improve by learning.D t l t d t ?Doctoral student ?
The challenges• Convince BI/SW that transfer of 600 bytes @ 30Hz is sustainable (when
used occasionally for a single BLM crate at the time).• Understanding the beam loss response
Conclusions
Collimation controls is ready to set the collimators for the first beamfor the first beam.
Still to be demonstrated• Function driven control.
• Machine protection functionality still to be tested.
Collimation position setup will be challenging.• Development of tools and applications required• Development of tools and applications required