Closed-loop Position Control of a Pediatric Soft Robotic ... - arXiv
6
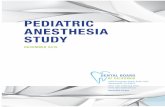
Closed-loop Position Control of a Pediatric Soft Robotic Wearable Device for Upper Extremity Assistance Caio Mucchiani, 1 Zhichao Liu, 1 Ipsita Sahin, 2 Jared Dube, 2 Linh Vu, 2 Elena Kokkoni, 2 Konstantinos Karydis 1 Abstract— This work focuses on closed-loop control based on proprioceptive feedback for a pneumatically-actuated soft wearable device aimed at future support of infant reaching tasks. The device comprises two soft pneumatic actuators (one textile-based and one silicone-casted) actively controlling two degrees-of-freedom per arm (shoulder adduction/abduction and elbow flexion/extension, respectively). Inertial measurement units (IMUs) attached to the wearable device provide real-time joint angle feedback. Device kinematics analysis is informed by anthropometric data from infants (arm lengths) reported in the literature. Range of motion and muscle co-activation patterns in infant reaching are considered to derive desired trajectories for the device’s end-effector. Then, a proportional-derivative con- troller is developed to regulate the pressure inside the actuators and in turn move the arm along desired setpoints within the reachable workspace. Experimental results on tracking desired arm trajectories using an engineered mannequin are presented, demonstrating that the proposed controller can help guide the mannequin’s wrist to the desired setpoints. I. I NTRODUCTION Innovation in pediatric assistive devices appears to lag compared to advances in devices for adults [1]–[4]. Key differentiating factors (e.g., working with smaller body pro- portions that vary with time and supporting greater activity levels and longer use of devices compared to adults) make the development of pediatric devices extra challenging; es- pecially those intended for use by infants (0-2 yrs of age) [1]–[3]. Specifically for upper extremity (UE) assistance, only a few passive devices are currently available (e.g., the Pediatric Wilmington Robotic Exoskeleton [5] and wearable Playskin [6]). Active assistance and feedback-based control, however, may be critical innovative features allowing for greater efficiency and higher precision when performing UE movements. In our previous work [7] we introduced the first soft-actuated wearable for UE movement assistance designed specifically for infants, using silicone-based pneumatic actu- ators in a 4-DOF (two per limb) UE exosuit. As active assistance becomes an important element for soft wearables, actuation needs to be considered carefully both in terms of the form/type of the actuators used and the type of control (open-loop, feedback) employed. Var- ious types of soft actuators including 3D-printed [8], [9], silicone-casted [7], [10] and textile [11]–[14] ones have 1 Dept. of Electrical and Computer Eng. and 2 Dept. of Bioengineering; Univ. of California, Riverside, 900 University Avenue, Riverside, CA 92521, USA. Email: {caiocesr, zliu157, isahi001, jdube004, lvu035, elena.kokkoni, karydis}@ucr.edu. We gratefully acknowledge the support of NSF # CMMI-2133084 and ARL # W911NF-18-1-0266. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the funding agencies. Fig. 1. The current wearable prototype, featuring soft pneumatic actuators to generate motion about elbow and shoulder joints. (a) Testing with an engineered mannequin, using two IMUs one in the upper arm and one in the forearm. (b) Shoulder actuator design, with two channels and insert in the armpit. (c) Silicon-casted bending elbow actuator. been developed and employed in the context of wearable devices [15] for adult rehabilitation [16], [17], strength augmentation [18], [19] and fatigue reduction [12], [20]. From a closed-loop control design standpoint, a recent study proposed kinematic control of a pneumatic textile actuator to assist in shoulder motion [21]. Position and force control methods were explored in [22]. Data-driven approaches to characterizing bending angles and controlling soft actuators were also discussed [23], [24]. Position control methods for soft actuators often consider PID implementation [25], [26] and LQG [27]. In such feedback-based controllers (as in this work too), state estimation (e.g., end-effector position) of the device is required. To eventually make these devices useful in out-of-lab settings (where motion capture is not available) sensing methods for position estimation can utilize strain sensors [28] and EMGs [14], IMUs [29], flex sensors [24] and image analysis [30], [31]. Design for sensing in soft robotics is discussed in [32], whereas algorithmic considerations for infants’ wearables are highlighted in [33]. Key factors leading to successful pediatric assistive de- vices include weight, level of safety, and ease of opera- tion [34], [35]. Herein we employ commercially-available IMUs for state feedback that are lightweight, enclosed, and directly transmit data that can be used by the user or within a software development pipeline (as herein). The current pro- totype (Fig. 1) comprises lightweight pneumatically-powered textile and silicone actuators for controlling motion about the shoulder and elbow joints for a single arm, respectively. A pneumatic control board to operate the actuators is mounted off-body at this stage of development. The primary contribution of this paper is the development of a closed-loop pneumatic proportional-derivative (PD) con- troller based on proprioceptive feedback from two IMUs mounted on the upper arm and forearm links of an engineered mannequin. PD control with on/off switching of pneumatic arXiv:2206.08292v1 [cs.RO] 16 Jun 2022
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Closed-loop Position Control of a Pediatric Soft Robotic ... - arXiv

Closed-loop Position Control of a Pediatric Soft Robotic WearableDevice for Upper Extremity Assistance
Caio Mucchiani,1 Zhichao Liu,1 Ipsita Sahin,2 Jared Dube,2 Linh Vu,2 Elena Kokkoni,2 Konstantinos Karydis1
Abstract— This work focuses on closed-loop control basedon proprioceptive feedback for a pneumatically-actuated softwearable device aimed at future support of infant reachingtasks. The device comprises two soft pneumatic actuators(one textile-based and one silicone-casted) actively controllingtwo degrees-of-freedom per arm (shoulder adduction/abductionand elbow flexion/extension, respectively). Inertial measurementunits (IMUs) attached to the wearable device provide real-timejoint angle feedback. Device kinematics analysis is informed byanthropometric data from infants (arm lengths) reported in theliterature. Range of motion and muscle co-activation patterns ininfant reaching are considered to derive desired trajectories forthe device’s end-effector. Then, a proportional-derivative con-troller is developed to regulate the pressure inside the actuatorsand in turn move the arm along desired setpoints within thereachable workspace. Experimental results on tracking desiredarm trajectories using an engineered mannequin are presented,demonstrating that the proposed controller can help guide themannequin’s wrist to the desired setpoints.
I. INTRODUCTION
Innovation in pediatric assistive devices appears to lagcompared to advances in devices for adults [1]–[4]. Keydifferentiating factors (e.g., working with smaller body pro-portions that vary with time and supporting greater activitylevels and longer use of devices compared to adults) makethe development of pediatric devices extra challenging; es-pecially those intended for use by infants (0-2 yrs of age)[1]–[3]. Specifically for upper extremity (UE) assistance,only a few passive devices are currently available (e.g., thePediatric Wilmington Robotic Exoskeleton [5] and wearablePlayskin [6]). Active assistance and feedback-based control,however, may be critical innovative features allowing forgreater efficiency and higher precision when performing UEmovements. In our previous work [7] we introduced the firstsoft-actuated wearable for UE movement assistance designedspecifically for infants, using silicone-based pneumatic actu-ators in a 4-DOF (two per limb) UE exosuit.
As active assistance becomes an important element forsoft wearables, actuation needs to be considered carefullyboth in terms of the form/type of the actuators used andthe type of control (open-loop, feedback) employed. Var-ious types of soft actuators including 3D-printed [8], [9],silicone-casted [7], [10] and textile [11]–[14] ones have
1 Dept. of Electrical and Computer Eng. and 2 Dept. of Bioengineering;Univ. of California, Riverside, 900 University Avenue, Riverside,CA 92521, USA. Email: {caiocesr, zliu157, isahi001,jdube004, lvu035, elena.kokkoni, karydis}@ucr.edu.We gratefully acknowledge the support of NSF # CMMI-2133084 andARL # W911NF-18-1-0266. Any opinions, findings, and conclusions orrecommendations expressed in this material are those of the authors anddo not necessarily reflect the views of the funding agencies.
Fig. 1. The current wearable prototype, featuring soft pneumatic actuatorsto generate motion about elbow and shoulder joints. (a) Testing with anengineered mannequin, using two IMUs one in the upper arm and one inthe forearm. (b) Shoulder actuator design, with two channels and insert inthe armpit. (c) Silicon-casted bending elbow actuator.
been developed and employed in the context of wearabledevices [15] for adult rehabilitation [16], [17], strengthaugmentation [18], [19] and fatigue reduction [12], [20].From a closed-loop control design standpoint, a recent studyproposed kinematic control of a pneumatic textile actuatorto assist in shoulder motion [21]. Position and force controlmethods were explored in [22]. Data-driven approaches tocharacterizing bending angles and controlling soft actuatorswere also discussed [23], [24]. Position control methods forsoft actuators often consider PID implementation [25], [26]and LQG [27]. In such feedback-based controllers (as inthis work too), state estimation (e.g., end-effector position)of the device is required. To eventually make these devicesuseful in out-of-lab settings (where motion capture is notavailable) sensing methods for position estimation can utilizestrain sensors [28] and EMGs [14], IMUs [29], flex sensors[24] and image analysis [30], [31]. Design for sensingin soft robotics is discussed in [32], whereas algorithmicconsiderations for infants’ wearables are highlighted in [33].
Key factors leading to successful pediatric assistive de-vices include weight, level of safety, and ease of opera-tion [34], [35]. Herein we employ commercially-availableIMUs for state feedback that are lightweight, enclosed, anddirectly transmit data that can be used by the user or within asoftware development pipeline (as herein). The current pro-totype (Fig. 1) comprises lightweight pneumatically-poweredtextile and silicone actuators for controlling motion about theshoulder and elbow joints for a single arm, respectively. Apneumatic control board to operate the actuators is mountedoff-body at this stage of development.
The primary contribution of this paper is the developmentof a closed-loop pneumatic proportional-derivative (PD) con-troller based on proprioceptive feedback from two IMUsmounted on the upper arm and forearm links of an engineeredmannequin. PD control with on/off switching of pneumatic
arX
iv:2
206.
0829
2v1
[cs
.RO
] 1
6 Ju
n 20
22

valves [36] has been found more robust in tracking higherfrequencies than a PID controller. Other works have also usedPD control for exoskeletons in rehabilitation [37], [38] andvalve PWM switching for pneumatic position control [39].
The controller is tasked to track arm trajectories deemedrelevant to infant reaching according to the literature, andincorporates kinematics constraints related to how infantsreach. The controller regulates the pneumatic pressure insidethe two actuators to achieve end-effector (wrist) setpointtracking. Experimental testing using the engineered man-nequin shows that our proposed controller can work well tomake the device’s end-effector follow the desired trajectories.
II. PROBLEM DESCRIPTION
This work seeks to develop a closed-loop controller basedon proprioceptive feedback for a pneumatically-actuated softwearable device that is analogous to a 2-DOF system, tosupport UE movement. We test the controller with a woodenmannequin (Fig. 2) scaled based on infant anthropometricdata. The torso of the mannequin is, for the purposes ofthis study, fixed in space. Consider the inertial coordinatesystem Pi = (X ,Y,Z), here taken to be aligned with themannequin’s right shoulder, and let the desired (calculatedby inverse kinematics of a desired point Pd) shoulder andelbow joint angles (for the mannequin’s arm to achieve) beθs and θe, respectively. In contrast to rigid exoskeletons,these two joints are controlled via pneumatic actuators inour work. One pneumatic actuator (as) is responsible forshoulder adduction/abduction, while the other (ae) controlselbow flexion/extension.
The goal is to regulate the pneumatic actuators’ internalpressure such that the final position of the wrist reaches w =Pd . To achieve so, we first generate desired trajectories for thejoint angles in the form of quintic polynomials minimizingjerk in motion and respecting acceleration constraints. Everymotion starts and finishes at rest, and motion constraints areshown in Table I, where θs, θe and θs, θe are the shoulder andelbow joints position and acceleration, respectively. Then,we derive a Proportional-Derivative (PD) controller basedon propioceptive feedback, namely two IMUs located at theupper arm and forearm of the mannequin.1
TABLE IKINEMATICS CONSTRAINTS
θsMIN θsMAX θeMIN θeMAX θs,θe(t = 0) θs,θe(t = T )
0 π/2 0 π/2 0 0
III. TECHNICAL ANALYSIS
This section contains the key technical contributions ofthe paper. We begin by performing a kinematics analysis ofthe wearable device. We then detail how to construct desiredjoint angle trajectories that are appropriate for infants. Lastlyyet importantly, we develop a closed-loop PD controller
1 At this stage of development, the device operates at a quasistaticregime. As such, dynamic effects and disturbances have been excluded frommodeling and control design and comprise part of future work.
Fig. 2. Reference frames, joint angles and links used in kinematics analysis.
for a pneumatically-actuated system based on IMU deviceegomotion feedback.
A. Device Kinematics Analysis
Range of motion and acceptable workspace constraintsfor our wearable device were informed by relevant infantstudies. First, the length of the upper arm (dse) and forearm(dew) were chosen to be dse = dew = 70 mm for a 7-month-old infant based on [40] (which considered 198 6-9 month-old infants). Second, our literature review on infant reachingkinematics [41]–[43], revealed an average reaching durationof about 1 sec, and average and peak velocities of 283 mm/sand 565.4 mm/s, respectively. Third, reaching workspaceinformation was obtained from a recent study with 10infants affected by brachial plexus palsy, which assessedthe UE reachable workspace of their affected and unaffectedlimbs via motion capture [44]. Lastly, information on infantmovement control was derived by a study that assessed theeffects of object size (among others) on reaching, and foundthat larger objects tend to be grasped in a feed-forwardmanner (symmetrical hand-speed profiles), in contrast tosmaller objects where feedback control was present (asym-metrical hand-speed profiles) [45]. Figure 3 visualizes theseconstraints in the form of the device’s workspace (left panel)and desired configurations for the end-effector to reach (rightpanel).
With reference to Fig. 2, the Denavit-Hartenberg parame-ters of the mechanism can be directly computed (Table II).
TABLE IIDENAVIT-HARTENBERG PARAMETERS
θ j d j r j α j
θs 0 dse π/2θe 0 dew 0
The homogeneous transformation matrix then is
T =
⎡⎢⎢⎣cθscθe −cθssθe sθs cθs(dse +dewcθe)sθscθe −sθssθe −cθs sθs(dse +dewcθe)
sθe cθe 0 dewsθe0 0 0 1
⎤⎥⎥⎦ , (1)
with orientation of the end-effector ω = [0,θs,θe]T . The for-
ward kinematics leading to the end-effector position [x,y,z]T
is given by the first three values of the last column of T , i.e.⎡⎣xyz
⎤⎦=
⎡⎣cθs(dse +dewcθe)sθs(dse +dewcθe)
dewsθe
⎤⎦ , (2)

Fig. 3. Wearable workspace (left) considering position constraints andaverage upper extremity and forearm measurements for infants and desiredpoints (right) for trajectory generation.
and thus the joint angles are computed by
θs = atan2(y,x), θe = atan2(z,√
x2 + y2 −dse) . (3)
The Jacobian matrix of the end-effector (Jee) is
Jee =
⎡⎢⎢⎢⎢⎢⎢⎣−sθs(dse +dewcθe) −dewcθssθecθs(dse +dewcθe) −dewsθssθe
0 dewcθe0 00 11 0
⎤⎥⎥⎥⎥⎥⎥⎦ . (4)
Jee is non-square (Jacobian deficient) as the system is under-actuated. In this case, since only two DOFs are controllable,we can separately analyze the first three rows of Jee, disre-garding the last two rows (ωy and ωz) as they are redundant.
Considering the square sub-matrices J1, J2 and J3 as elim-ination of the third, second and first rows of Jee and takingthe determinant and plotting against angles θs and θe, weobtain regions of singularities (Fig. 4). The workspace for thewearable can also be determined. Considering the positionlimits described in Table I, a set of end-effector positions iscalculated and approximated by alpha shapes [46].
B. Trajectory Generation
Three distinct modes of actuation were considered basedon previous work on muscle co-activation in infant reach-ing [47] and prior testing of our initial prototype [7]:
• Biceps only (BO): elbow actuator trajectory.• Deltoid only (DO): shoulder actuator trajectory.• Combined Muscle (CM): elbow and shoulder actuators’
trajectory combined.
TABLE IIIDESIRED POINTS FOR TRAJECTORIES AND JOINT ANGLES
Pd (X ,Y,Z) θds θde Type
P0 (0,0,0.1400) π/2 0 StartP1 (0,0.1195,0.0495) π/2 π/4 BOP2 (0,0.0700,0.0700) π/2 π/2 BOP3 (0.0990,0.0990,0) π/4 0 DOP4 (0.0845,0.0845,0.0495) π/4 π/4 CMP5 (0.0495,0.0495,0.0700) π/4 π/2 CMP6 (0.1400,0,0) 0 0 DOP7 (0.1195,0,0.0495) 0 π/4 CMP8 (0.0700,0,0.0700) 0 π/2 CM
We consider eight distinct types of trajectories (two BO,two DO and four CM – see Table III). To create smooth
Fig. 4. Jacobian determinant of the sub-matrices and singularity points, cor-responding to shoulder and arm fully extended (θs,θe) = {(0,0),(π/2,0)}and flexed elbow (θs,θe) = {(0,π/2),(π/2,π/2)}.
and dynamically-feasible trajectories we consider quinticpolynomial time scaling [48], i.e.
Pd(t) = a0t5 +a1t4 +a2t3 +a3t2 +a4t +a5 . (5)
Trajectories are constructed by taking the first and secondderivative of (5), evaluating them and (5) at the boundaryconditions listed in Table I, and solving a linear problem toidentify coefficients a j, j = 0, . . . ,5. Desired configurationsare visualized in the right panel of Fig. 3; correspondingnumerical values are included in Table III. The globalreference frame at the shoulder joint is located at P0 and(X ,Y,Z) represents the wrist coordinate.
Fig. 5. Schematic diagram of the PD controller for the wearable device.
C. Pneumatic Feedback Control Design
We develop two PD controllers (PDi) to regulate theamount of pressure inside the actuators so that we can realizethe aforementioned desired trajectories. The control structureis summarized in Fig. 5. Let the error signal be
ei(t) = θdi(t)−θmi , i = s,e , (6)
where ei(t) is the position error between the time-scaleddesired joint angle values θdi(t) (specified in Table III)and angles measured online using the IMUs (θmi ). The PDcontroller acts on the error producing a PWM % signalmapped to the actuators via a pneumatic control board(detailed in the next section). The controller attains the form
Kgaini(t) = K piei(t)+Kdiddt
ei(t) , i = s,e , (7)
where Kgaini(t) are the gains translated to PWM signal forthe actuators ai (with maximum value of 100, meaning 100%PWM), K pi and Kdi are the proportional and derivative gainsfor each of the actuators ai, respectively.

Fig. 6. Averaged angle response based on different PWM values for bothactuators (top) with sampling time Ts = 0.065 s, and tuned PD controllerbased on the system model described in (8).
To approximate the system model, experimental data ofPWM and angle variation (using a motion capture system)were collected using the same sample time (Ts = 0.0625 s)for both actuators and averaged (Fig. 6). Both systems weremodeled as a spring-mass-damper, and Matlab (tfest) wasused to estimate the transfer functions as
as =52.62
s2 +15.57s+101.10, ae =
16.11s2 +0.271s+36.88
(8)
with estimation fit of 90.58% for the shoulder and 92.32%for the elbow actuator, respectively. The model in (8) wastuned via Matlab (Fig. 6) using the pidTuner Toolbox,resulting to K ps = 211, K pe = 213, Kds = 15, and Kde = 27.
IV. EXPERIMENTAL TESTING AND RESULTS
The wearable device and its pneumatic actuators aredepicted in Fig. 1. The choice of components reflects theneed for a device which minimizes discomfort (in termsof restriction of movement and weight) while also beingfunctional and affordable. The experimental setup (hardwaresetup and software integration) for implementation as wellas discussion of obtained results are described next.
A. Experimental Setup
A custom-made wooden mannequin scaled according toinfant anthropometric data [7] was used to mount thewearable device (Fig. 1, left). For actuation, two differentpneumatic designs were adopted (Fig. 1, right). The elbowactuator (ae) is fabricated using 3D-printed casting moldsand Smooth-On Dragon Skin 30 silicone [7]. The shoulderactuator (as) was made via heat-sealable coated Oxford fabric[49], to allow for better mobility of the joint while stillsupporting the arm as compared to a silicone counterpart [7].
The use of wireless IMUs [29] intends to facilitate usabil-ity while also minimize restrictions on the movement on thedevice. We have utilized the Mbientlab MetaMotionRl devicewhich has 9-axis measurements of accelerometer, gyroscopeand magnetometer, and provides sensor fusion streaming
Fig. 7. Experimental setup for the motion capture system and example ofmotion to point P8 (from left to right).
quaternions in real time using BLE communication. Twosensors (see Fig. 1) were placed at the midpoints of forearm(IMUs) and upper arm (IMUe) for estimating angles θs andθe. For evaluation, a 12-camera Optitrack motion capturesystem (Fig. 7) was used for ground truth in experiments.
To implement the controller, an Nvidia Jetson Nano run-ning ROS (Robot Operating System) communicated with thepneumatic control board (which uses the same layout asin [50]) through an Arduino Nano microcontroller runningRosserial. The board (Fig. 8) has four pumps and four valves,with maximum pressure of 50 kPa and flow rate of 2 l/min.
Fig. 8. Pneumatic control board with pumps and valves distribution (P,Vindicates both pressure and vacuum can be sent to the actuators).
Control and IMU data acquisition modules are pythonscripts; communication modules to the pneumatic controlboard are in C++. Communication between both moduleswas done via ROS at a rate of 50 Hz.
B. Results and Discussion
A total of 64 experiments (eight per desired trajectoryPi, i = 1, . . . ,8 as per Table III) were performed to testour controller. Figure 9 depicts obtained results. It can bereadily verified that the controller performs well for mostBO, DO and CM type trajectories, closely following thedesired trajectories. Values for the PWM% were consistentwith the expected behavior of the controller. A high (near100%) PWM indicated more pneumatic effort to achieve thedesired joint angle (usually required by the elbow actuator,since it has more mechanical resistance than the shoulderactuator, in P2 and P5 for instance), and no effort when nojoint displacement was required (for shoulder in BO andelbow in DO type trajectories, in P2 and P3 for instance).
However, significant steady state error was observed forsome trajectories requiring large elbow displacements θe >π/4, such as for P2, P5, and P8 (Fig. 10). Factors such asinsufficient pressure from the pneumatic board (since thistype of silicone-casted actuators requires higher pressure thanthe textile-based one) combined with the limited range ofmotion for the used actuators were the main contributorsto steady state errors. Further, inability for the mannequinto maintain shoulder planar motion while performing elbowflexion/extension (interfering with the angular feedback from

Fig. 9. Experimental results for the spatial trajectories defined by TableIII, there P0 was the initial point in the trajectory.
Fig. 10. Average absolute position error of the shoulder and elbow actuatorsas a function of time for all trajectories. As it can be seen (red arrow), largesteady state errors occurred for trajectories P2, P5 and P8 as a full π/2rotation of the elbow joint was required but not attained due to insufficientpressure from the pneumatic board. In addition, imprecise IMU readingsmay also have affected the controller input and thus the final position.
the IMUs), relative motion of the elbow actuator on theforearm and no fixture in one of its ends (and thereforeallowing only active pushing and not pulling) were some ofthe contributing factors for the observed disparity. Althoughundesirable, these will inform future iterations of the elbowactuator to better address the desired range of motion, andalso improve aspects such as actuator weight and mobility.
V. CONCLUSION
This work presented IMU-feedback-based closed-loop PDposition control of a hybrid soft wearable device for in-
fants, consisting of two pneumatic actuators assisting themotion of two DOF, at the shoulder and elbow joints.The controlled actuators were manufactured using differentmethods and materials, to allow for a better usability whilealso minimizing potential motion constraints on reachingmovements. Device kinematics analysis along with anthropo-metric data from infant reaching informed the developmentof a trajectory generation method for the wearable to tracksmooth, dynamically-feasible trajectories. A PD controllerwas developed to regulate the amount of pressure inside theactuators for the wearable’s end-effector to track the desiredtrajectories. Experimental results validated the proposed PDcontroller for most types of trajectories, but factors such asinsufficient pressure from the actuators in achieving the finaldesired position were observed.
Future work will build on top of the trajectory genera-tion method and closed-loop controller developed herein byintegrating force sensing to develop an impedance controlmethod. Additional sensing methods (such as flex sensors)can be combined with current sensors to investigate alterna-tive control methods. Addition of an actuator to the wrist,use of actuators on both arms, and extension of the shoulderjoint to a full 3-DOF motion will also be investigated.
REFERENCES
[1] K. Chowdhury, C. Park, C. Epps, and E. Chen, “FDA’aPediatric Device Consortia Grants Program: Narrowingthe Gap in Pediatric Medical Device Development.”https://www.fda.gov/media/118152/download. Accessed 2022-03-23.
[2] T. Sanger, A. Chang, W. Feaster, S. Taraman, N. Afari, D. Beauregard,B. Dethlefs, T. Ghere, M. Kabeer, G. Tolomiczenko, et al., “Oppor-tunities for regulatory changes to promote pediatric device innovationin the united states: Joint recommendations from pediatric innovatorroundtables,” IEEE Journal of Translational Engineering in Healthand Medicine, vol. 9, pp. 1–5, 2021.
[3] J. B. Christy, M. A. Lobo, K. Bjornson, S. C. Dusing, E. Field-Fote,M. Gannotti, J. C. Heathcock, M. E. O’Neil, and J. H. Rimmer,“Technology for children with brain injury and motor disability:executive summary from research summit iv,” Pediatric PhysicalTherapy, vol. 28, no. 4, pp. 483–489, 2016.
[4] A. J. Arnold, J. L. Haworth, V. O. Moran, A. Abulhasan, N. Steinbuch,and E. Kokkoni, “Exploring the unmet need for technology to promotemotor ability in children younger than 5 years of age: a systematicreview,” Archives of Rehabilitation Research and Clinical Translation,vol. 2, no. 2, p. 100051, 2020.
[5] I. Babik, E. Kokkoni, A. B. Cunha, J. C. Galloway, T. Rahman, andM. A. Lobo, “Feasibility and effectiveness of a novel exoskeletonfor an infant with arm movement impairments,” Pediatric PhysicalTherapy, vol. 28, no. 3, p. 338, 2016.
[6] M. A. Lobo, J. Koshy, M. L. Hall, O. Erol, H. Cao, J. M. Buckley, J. C.Galloway, and J. Higginson, “Playskin lift: development and initialtesting of an exoskeletal garment to assist upper extremity mobilityand function,” Physical therapy, vol. 96, no. 3, pp. 390–399, 2016.
[7] E. Kokkoni, Z. Liu, and K. Karydis, “Development of a soft roboticwearable device to assist infant reaching,” Journal of Engineering andScience in Medical Diagnostics and Therapy, vol. 3, no. 2, 2020.
[8] H. K. Yap, H. Y. Ng, and C.-H. Yeow, “High-force soft printablepneumatics for soft robotic applications,” Soft Robotics, vol. 3, no. 3,pp. 144–158, 2016.
[9] M. Schaffner, J. A. Faber, L. Pianegonda, P. A. Ruhs, F. Coulter, andA. R. Studart, “3d printing of robotic soft actuators with programmablebioinspired architectures,” Nature communications, vol. 9, no. 1, pp. 1–9, 2018.
[10] H. Li, J. Yao, P. Zhou, X. Chen, Y. Xu, and Y. Zhao, “High-forcesoft pneumatic actuators based on novel casting method for roboticapplications,” Sensors and Actuators A: Physical, vol. 306, p. 111957,2020.

[11] W. Kim, H. Park, and J. Kim, “Compact flat fabric pneumatic artificialmuscle (ffpam) for soft wearable robotic devices,” IEEE Robotics andAutomation Letters, vol. 6, no. 2, pp. 2603–2610, 2021.
[12] J. Nassour, F. H. Hamker, and G. Cheng, “High-performanceperpendicularly-enfolded-textile actuators for soft wearable robots:design and realization,” IEEE Transactions on Medical Robotics andBionics, vol. 2, no. 3, pp. 309–319, 2020.
[13] C. Fu, Z. Xia, C. Hurren, A. Nilghaz, and X. Wang, “Textilesin soft robots: Current progress and future trends,” Biosensors andBioelectronics, vol. 196, p. 113690, 2022.
[14] H. K. Yap, P. M. Khin, T. H. Koh, Y. Sun, X. Liang, J. H. Lim, andC.-H. Yeow, “A fully fabric-based bidirectional soft robotic glove forassistance and rehabilitation of hand impaired patients,” IEEE Roboticsand Automation Letters, vol. 2, no. 3, pp. 1383–1390, 2017.
[15] Y. Chen, Y. Yang, M. Li, E. Chen, W. Mu, R. Fisher, and R. Yin,“Wearable actuators: An overview,” Textiles, vol. 1, no. 2, pp. 283–321, 2021.
[16] A. Zahedi, B. Zhang, A. Yi, and D. Zhang, “A soft exoskeleton fortremor suppression equipped with flexible semiactive actuator,” Softrobotics, vol. 8, no. 4, pp. 432–447, 2021.
[17] R. F. Natividad, T. Miller-Jackson, and R. Y. Chen-Hua, “A 2-dofshoulder exosuit driven by modular, pneumatic, fabric actuators,” IEEETransactions on Medical Robotics and Bionics, vol. 3, no. 1, pp. 166–178, 2020.
[18] C. Simpson, B. Huerta, S. Sketch, M. Lansberg, E. Hawkes, andA. Okamura, “Upper extremity exomuscle for shoulder abductionsupport,” IEEE Transactions on Medical Robotics and Bionics, vol. 2,no. 3, pp. 474–484, 2020.
[19] C. T. O’Neill, N. S. Phipps, L. Cappello, S. Paganoni, and C. J. Walsh,“A soft wearable robot for the shoulder: Design, characterization, andpreliminary testing,” in IEEE International Conference on Rehabilita-tion Robotics (ICORR), pp. 1672–1678, 2017.
[20] C. O’Neill, T. Proietti, K. Nuckols, M. E. Clarke, C. J. Hohimer,A. Cloutier, D. J. Lin, and C. J. Walsh, “Inflatable soft wearable robotfor reducing therapist fatigue during upper extremity rehabilitation insevere stroke,” IEEE Robotics and Automation Letters, vol. 5, no. 3,pp. 3899–3906, 2020.
[21] Y. M. Zhou, C. Hohimer, T. Proietti, C. T. O’Neill, and C. J. Walsh,“Kinematics-based control of an inflatable soft wearable robot forassisting the shoulder of industrial workers,” IEEE Robotics andAutomation Letters, vol. 6, no. 2, pp. 2155–2162, 2021.
[22] P. Abbasi, M. A. Nekoui, M. Zareinejad, P. Abbasi, and Z. Azhang,“Position and force control of a soft pneumatic actuator,” Soft Robotics,vol. 7, no. 5, pp. 550–563, 2020.
[23] M. H. Mohamed, S. H. Wagdy, M. A. Atalla, A. Rehan Youssef, andS. A. Maged, “A proposed soft pneumatic actuator control based onangle estimation from data-driven model,” Journal of Engineering inMedicine, vol. 234, no. 6, pp. 612–625, 2020.
[24] K. Elgeneidy, N. Lohse, and M. Jackson, “Bending angle predictionand control of soft pneumatic actuators with embedded flex sensors–adata-driven approach,” Mechatronics, vol. 50, pp. 234–247, 2018.
[25] Q. Ji, X. Zhang, M. Chen, X. V. Wang, L. Wang, and L. Feng,“Design and closed loop control of a 3d printed soft actuator,” in IEEEInternational Conference on Automation Science and Engineering(CASE), pp. 842–848, 2020.
[26] J. Morrow, H.-S. Shin, C. Phillips-Grafflin, S.-H. Jang, J. Torrey,R. Larkins, S. Dang, Y.-L. Park, and D. Berenson, “Improving softpneumatic actuator fingers through integration of soft sensors, positionand force control, and rigid fingernails,” in IEEE International Con-ference on Robotics and Automation (ICRA), pp. 5024–5031, 2016.
[27] M. Hofer and R. D’Andrea, “Design, modeling and control of a softrobotic arm,” in IEEE/RSJ International Conference on IntelligentRobots and Systems (IROS), pp. 1456–1463, 2018.
[28] M. C. Yuen, R. Kramer-Bottiglio, and J. Paik, “Strain sensor-embedded soft pneumatic actuators for extension and bending feed-back,” in IEEE International Conference on Soft Robotics (RoboSoft),pp. 202–207, 2018.
[29] K. Little, C. W. Antuvan, M. Xiloyannis, B. A. De Noronha, Y. G.Kim, L. Masia, and D. Accoto, “Imu-based assistance modulation inupper limb soft wearable exosuits,” in IEEE International Conferenceon Rehabilitation Robotics (ICORR), pp. 1197–1202, 2019.
[30] D. Li, V. Dornadula, K. Lin, and M. Wehner, “Position control for softactuators, next steps toward inherently safe interaction,” Electronics,vol. 10, no. 9, p. 1116, 2021.
[31] A. Dechemi, V. Bhakri, I. Sahin, A. Modi, J. Mestas, P. Peiris, D. E.Barrundia, E. Kokkoni, and K. Karydis, “Babynet: A lightweightnetwork for infant reaching action recognition in unconstrained en-vironments to support future pediatric rehabilitation applications,”in IEEE International Conference on Robot & Human InteractiveCommunication (RO-MAN), pp. 461–467, 2021.
[32] J. Tapia, E. Knoop, M. Mutny, M. A. Otaduy, and M. Bacher,“Makesense: Automated sensor design for proprioceptive soft robots,”Soft robotics, vol. 7, no. 3, pp. 332–345, 2020.
[33] I. A. Trujillo-Priego, C. J. Lane, D. L. Vanderbilt, W. Deng, G. E.Loeb, J. Shida, and B. A. Smith, “Development of a wearable sensoralgorithm to detect the quantity and kinematic characteristics ofinfant arm movement bouts produced across a full day in the naturalenvironment,” Technologies, vol. 5, no. 3, p. 39, 2017.
[34] I. Braito, M. Maselli, G. Sgandurra, E. Inguaggiato, E. Beani, F. Cec-chi, G. Cioni, and R. Boyd, “Assessment of upper limb use inchildren with typical development and neurodevelopmental disordersby inertial sensors: a systematic review,” Journal of Neuroengineeringand Rehabilitation, vol. 15, no. 1, pp. 1–18, 2018.
[35] A. Gonzalez, L. Garcia, J. Kilby, and P. McNair, “Robotic devicesfor paediatric rehabilitation: a review of design features,” BioMedicalEngineering OnLine, vol. 20, no. 1, pp. 1–33, 2021.
[36] B. Hejrati and F. Najafi, “Accurate pressure control of a pneumaticactuator with a novel pulse width modulation–sliding mode controllerusing a fast switching on/off valve,” Journal of Systems and ControlEngineering, vol. 227, no. 2, pp. 230–242, 2013.
[37] W. Meng, B. Sheng, M. Klinger, Q. Liu, Z. Zhou, and S. Q. Xie, “De-sign and control of a robotic wrist orthosis for joint rehabilitation,” inIEEE International Conference on Advanced Intelligent Mechatronics(AIM), pp. 1235–1240, 2015.
[38] R. J. Chauhan and P. Ben-Tzvi, “A series elastic actuator designand control in a linkage based hand exoskeleton,” in ASME DynamicSystems and Control Conference, vol. 59162, p. V003T17A003, 2019.
[39] M. Taghizadeh, F. Najafi, and A. Ghaffari, “Multimodel pd-control ofa pneumatic actuator under variable loads,” The International Journalof Advanced Manufacturing Technology, vol. 48, no. 5, pp. 655–662,2010.
[40] Y. Sivan, P. Merlob, and S. H. Reisner, “Upper limb standards innewborns,” American Journal of Diseases of Children, vol. 137, no. 9,pp. 829–832, 1983.
[41] R. K. Clifton, P. Rochat, D. J. Robin, and N. E. Bertheir, “Multimodalperception in the control of infant reaching.,” Journal of ExperimentalPsychology: Human perception and performance, vol. 20, no. 4,p. 876, 1994.
[42] R. V. Goncalves, E. M. Figueiredo, C. B. Mourao, E. A. Colosimo,S. T. Fonseca, and M. C. Mancini, “Development of infant reachingbehaviors: Kinematic changes in touching and hitting,” Infant Behaviorand Development, vol. 36, no. 4, pp. 825–832, 2013.
[43] A. Bhat and J. Galloway, “Toy-oriented changes during early armmovements: Hand kinematics,” Infant Behavior and Development,vol. 29, no. 3, pp. 358–372, 2006.
[44] R. T. Richardson, S. A. Russo, R. S. Chafetz, S. Warshauer, E. Nice,S. H. Kozin, D. A. Zlotolow, and J. G. Richards, “Reachableworkspace with real-time motion capture feedback to quantify upperextremity function: A study on children with brachial plexus birthinjury,” Journal of Biomechanics, vol. 132, p. 110939, 2022.
[45] N. E. Berthier, R. K. Clifton, V. Gullapalli, D. D. McCall, and D. J.Robin, “Visual information and object size in the control of reaching,”Journal of Motor Behavior, vol. 28, no. 3, pp. 187–197, 1996.
[46] H. Edelsbrunner and E. P. Mucke, “Three-dimensional alpha shapes,”ACM Transactions on Graphics, vol. 13, no. 1, pp. 43–72, 1994.
[47] J. P. Spencer and E. Thelen, “Spatially specific changes in infants’muscle coactivity as they learn to reach,” Infancy, vol. 1, no. 3,pp. 275–302, 2000.
[48] K. Lynch and F. Park, Modern Robotics. Cambridge University Press,2017.
[49] I. Sahin, J. Dube, C. Mucchiani, K. Karydis, and E. Kokkoni, “Abidirectional fabric-based pneumatic actuator for the infant shoulder:Design and comparative kinematic analysis,” in IEEE InternationalConference on Robot & Human Interactive Communication (RO-MAN), 2022.
[50] Z. Liu and K. Karydis, “Position control and variable-height trajectorytracking of a soft pneumatic legged robot,” in IEEE/RSJ InternationalConference on Intelligent Robots and Systems (IROS), pp. 1708–1709,2021.