Cinemática est parte 1
23
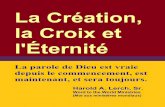
PROBLEMA 1 En el mecanismo de la figura, se desea conocer la posición que toma el punto B, si el eslabón 2 adquiere las posiciones que se corresponden a los ángulos θ2 = 120º y θ2 = 215º. Se conoce la distancia O2A = 32 mm y las distancias que se muestran en la figura. ≔ O 2 A 32 ≔ O 2 O 5 90 ≔ O 5 Bx 90 Para resolver este problema, debe hacerse una ecuación de lazo vectorial entre los puntos O2, O5 y A: = + r O2A r AO5 r O2O5 (1.1) donde : ≔ r O2A ⎛ ⎝ θ 2 ⎞ ⎠ ⋅ O 2 A cos ⎛ ⎝ θ 2 ⎞ ⎠ ⋅ O 2 A sin ⎛ ⎝ θ 2 ⎞ ⎠ 0 ⎡ ⎢ ⎢ ⎣ ⎤ ⎥ ⎥ ⎦ = r AO5 ⎛ ⎝ θ 2 ⎞ ⎠ ⋅ AO 5 ⎛ ⎝ θ 2 ⎞ ⎠ cos ⎛ ⎝ θ 4 ⎛ ⎝ θ 2 ⎞ ⎠ ⎞ ⎠ ⋅ AO 5 ⎛ ⎝ θ 2 ⎞ ⎠ sin ⎛ ⎝ θ 4 ⎛ ⎝ θ 2 ⎞ ⎠ ⎞ ⎠ 0 ⎡ ⎢ ⎢ ⎣ ⎤ ⎥ ⎥ ⎦ ≔ r o2o5 O 2 O 5 0 0 ⎡ ⎢ ⎢ ⎣ ⎤ ⎥ ⎥ ⎦ Se puede observar, que esta ecuación vectorial posee dos incógnitas, una de ellas es AO5 y la segunda es θ4. Para resolver la ecuación se procede a colocar ambas componentes (X e Y), de la ecuación vectorial, por separado y conformando un par de ecuaciones escalares con dos incógnitas: X : = + ⋅ O 2 A cos ⎛ ⎝ θ 2 ⎞ ⎠ ⋅ AO 5 ⎛ ⎝ θ 2 ⎞ ⎠ cos ⎛ ⎝ θ 4 ⎛ ⎝ θ 2 ⎞ ⎠ ⎞ ⎠ O 2 O 5 (1.2) Y : = + ⋅ O 2 A sin ⎛ ⎝ θ 2 ⎞ ⎠ ⋅ AO 5 ⎛ ⎝ θ 2 ⎞ ⎠ sin ⎛ ⎝ θ 4 ⎛ ⎝ θ 2 ⎞ ⎠ ⎞ ⎠ 0 (1.3) Problemas de Teoría de Máquinas y Mecanismos Cinemática Prof. Sebastián E. Provenzano R. 17
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of Cinemática est parte 1

PROBLEMA 1En el mecanismo de la figura, se desea conocer la posición que toma el punto B, si el eslabón 2 adquiere las posiciones que se corresponden a los ángulos θ2 = 120º y θ2 = 215º.Se conoce la distancia O2A = 32 mm y las distancias que se muestran en la figura.
≔O2A 32
≔O2O5 90
≔O5Bx 90
Para resolver este problema, debe hacerse una ecuación de lazo vectorial entre los puntos O2, O5 y A:
=+rO2A rAO5 rO2O5 (1.1)
donde :
≔rO2A⎛⎝θ2
⎞⎠
⋅O2A cos ⎛⎝θ2⎞⎠
⋅O2A sin ⎛⎝θ2⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rAO5⎛⎝θ2
⎞⎠
⋅AO5⎛⎝θ2
⎞⎠ cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠⋅AO5
⎛⎝θ2⎞⎠ sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
≔ro2o5
O2O5
0
0
⎡⎢⎢⎣
⎤⎥⎥⎦
Se puede observar, que esta ecuación vectorial posee dos incógnitas, una de ellas es AO5 y la segunda es θ4. Para resolver la ecuación se procede a colocar ambas componentes (X e Y), de la ecuación vectorial, por separado y conformando un par de ecuaciones escalares con dos incógnitas:
X : =+⋅O2A cos ⎛⎝θ2⎞⎠ ⋅AO5
⎛⎝θ2⎞⎠ cos ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠ O2O5 (1.2)
Y : =+⋅O2A sin ⎛⎝θ2⎞⎠ ⋅AO5
⎛⎝θ2⎞⎠ sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠ 0 (1.3)
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 17

Este sistema de ecuaciones puede ser resuelto por sustitución, pero es conveniente que se realice el despeje de la distancia AO5 de la ecuación (1.3) y se sustituya en la ec. (1.2). De esta forma el sistema de ecuaciones puede ser resuelto sin inconveniente alguno ya que la primera variable a despejar será el ángulo θ4, evitándose de esta forma que deba resolverse una ecuación implícita.
De la ecuación (1.3):
=AO5⎛⎝θ2
⎞⎠ −―――――⋅O2A sin ⎛⎝θ2
⎞⎠
sin ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠(1.4)
Esta última se sustituye en la primera ecuación, obteniéndose θ4 para cada uno de los θ2
(120º y 215º):
≔θ4⎛⎝θ2
⎞⎠ −atan⎛⎜⎝―――――――
⋅O2A sin ⎛⎝θ2⎞⎠
−O2O5 ⋅O2A cos ⎛⎝θ2⎞⎠
⎞⎟⎠
(1.5)
=θ4
⎛⎜⎝
120
215
⎡⎢⎣
⎤⎥⎦
⎞⎟⎠
−14.6516
8.9751
⎡⎢⎣
⎤⎥⎦
deg
Aunque no se solicite en el enunciado del problema, es posible obtener, con el uso de la ecuación correspondiente, las distancias AO5 para cada θ2:
≔AO5⎛⎝θ2
⎞⎠ −―――――⋅O2A sin ⎛⎝θ2
⎞⎠
sin ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠(1.6)
=AO5
⎛⎜⎝
120
215
⎡⎢⎣
⎤⎥⎦
⎞⎟⎠
109.5628
117.6534
⎡⎢⎣
⎤⎥⎦
mm
Para encontrar la posición del punto B, para cada θ2, es útil observar las componentes del vector posición que se define entre los puntos O5 y B, en el cual el ángulo de inclinación es el mismo θ4
calculado anteriormente y la componente X es conocida (90 mm en la figura):
=rO5B⎛⎝θ2
⎞⎠
90 mm
ry
0
⎡⎢⎢⎣
⎤⎥⎥⎦
Otra forma de expresar las componentes del vector rO5B es la siguiente:
=rO5B⎛⎝θ2
⎞⎠
⋅O5B ⎛⎝θ2⎞⎠ cos ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
⋅O5B ⎛⎝θ2⎞⎠ sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
Igualando las componentes X's del mismo vecror rO5B, en diferente representación:
=⋅O5B ⎛⎝θ2⎞⎠ cos ⎛⎝θ4
⎞⎠ 90 mm
Ahora se despeja O5B:
≔O5B ⎛⎝θ2⎞⎠ ――――
90
cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠(1.7)
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 18

=O5B⎛⎜⎝
120
215
⎡⎢⎣
⎤⎥⎦
⎞⎟⎠
93.025
91.1156
⎡⎢⎣
⎤⎥⎦
mm
Finalmente :
≔rO5B⎛⎝θ2
⎞⎠
⋅O5B ⎛⎝θ2⎞⎠ cos ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
⋅O5B ⎛⎝θ2⎞⎠ sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
(1.8)
=rO5B((120 ))
90
−23.5297
0
⎡⎢⎢⎣
⎤⎥⎥⎦
mm
=rO5B((215 ))
90
14.2144
0
⎡⎢⎢⎣
⎤⎥⎥⎦
mm
Por lo tanto, el punto B se encuentra 23.53 mm por debajo de la línea horizontal O2O5, cuando θ2 toma el valor de 120º y a 14.214 mm por encima de la misma linea, cuando θ2 toma el valorde 215º.
REPRESENTACIÓN GRÁFICAA continuación se representan los vectores rOA y rAB en un sistema coordenado cartesiano para los dos ángulos 2.
Para:
≔θ2 120
-24
-16
-8
0
8
16
24
-40
-32
32
0 30 60 90 120 150 180-60 -30 210
rOAy⎛⎝θ2
⎞⎠ (( ))
rABy⎛⎝θ2
⎞⎠ (( ))
rOAx⎛⎝θ2
⎞⎠ (( ))
rABx⎛⎝θ2
⎞⎠ (( ))
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 19

Para:≔θ2 215
-24
-16
-8
0
8
16
24
-40
-32
32
0 30 60 90 120 150 180-60 -30 210
rOAy⎛⎝θ2
⎞⎠ (( ))
rABy⎛⎝θ2
⎞⎠ (( ))
rOAx⎛⎝θ2
⎞⎠ (( ))
rABx⎛⎝θ2
⎞⎠ (( ))
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 20

PROBLEMA 2
Halle, mediante el método analítico vectorial, las expresiones que relacionan el movimiento angular del eslabón 2, con el desplazamiento del punto C.
Posteriormente halle, con la ayuda de las expresiones halladas, la posición que toma el punto C cuando la barra 2 forma 0°, 60°, 120°, 200° y 290° con el semieje positivo X.
≔O2A 60
≔O2O4 90
≔BC 75
≔O4B 60
≔O4Cy 90
Si se observa con cuidado, se pueden identificar dos mecanismos Manivela Biela Carro (MBC). El primero se encuentra entre los puntos O2, A y O4, este es una inversión del MBC básico. El segundo se encuentra entre los puntos O4, B y C, este último es un MBC básico con un descentramiento de 90 mm y en el cual no existe manivela, en su lugar se tiene un balancín entre los puntos O4 y B. Por lo tanto, para resolver este problema, deben plantearse dos ecuaciones de lazo vectorial, una para cada mecanismo MBC descrito.La primera ecuación de lazo deberá contemplar los puntos O2, A y O4, por ejemplo:
=+rO2A⎛⎝θ2
⎞⎠ rAO4⎛⎝θ2
⎞⎠ rO2O4 (2.1)
donde:
≔rO2A⎛⎝θ2
⎞⎠
⋅O2A cos ⎛⎝θ2⎞⎠
⋅O2A sin ⎛⎝θ2⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rAO4⎛⎝θ2
⎞⎠
⋅AO4⎛⎝θ2
⎞⎠ cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠⋅AO4
⎛⎝θ2⎞⎠ sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
≔rO2O4
0
−O2O4
0
⎡⎢⎢⎣
⎤⎥⎥⎦
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 21

Se puede observar que la ecuación vectorial (2.1) posee dos incógnitas, una de ellas es AO4 y la segunda es θ4. Para resolver la ecuación se procede a colocar ambas componentes (X e Y), de la ecuación vectorial, por separado y conformando un par de ecuaciones escalares con dos incógnitas:
X : =+⋅O2A cos ⎛⎝θ2⎞⎠ ⋅AO4
⎛⎝θ2⎞⎠ cos ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠ 0 (2.2)
Y : =+⋅O2A sin ⎛⎝θ2⎞⎠ ⋅AO4
⎛⎝θ2⎞⎠ sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠ −O2O4 (2.3)
Este sistema de ecuaciones puede ser resuelto por sustitución, pero es conveniente que se realice el despeje de la distancia AO4 de la ec. (2.2) y se sustituya en la ec. (2.3). De esta forma el sistema de ecuaciones puede ser resuelto sin inconveniente alguno, ya que la primera variable adespejar será el ángulo θ4, evitándose de esta forma que deba resolverse una ecuación implícita.Realizando el procedimiento descrito, resulta:
=θ4⎛⎝θ2
⎞⎠ atan⎛⎜⎝――――――――−⎛⎝ +O2O4 ⋅O2A sin ⎛⎝θ2
⎞⎠⎞⎠
⋅−O2A cos ⎛⎝θ2⎞⎠
⎞⎟⎠
(2.4)
Con el fin de obtener resultados de θ4 en cualquier cuadrante, se utiliza la función atan2:
≔θ4⎛⎝θ2
⎞⎠ atan2 ⎛⎝ ,⋅−O2A cos ⎛⎝θ2⎞⎠ −⎛⎝ +O2O4 ⋅O2A sin ⎛⎝θ2
⎞⎠⎞⎠⎞⎠
≔AO4⎛⎝θ2
⎞⎠ ―――――⋅−O2A cos ⎛⎝θ2
⎞⎠
cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠(2.5)
El angulo θ4 es la ahora la variable de entrada para el segundo mecanismo MBC. Para este segundo mecanismo se debe plantear una ecuación de lazo vectorial entre los puntos O4, B y C. Una posibilidad es la siguiente:
=+rO4B⎛⎝θ2
⎞⎠ rBC⎛⎝θ2
⎞⎠ rO4C⎛⎝θ2
⎞⎠ (2.6)
donde:
≔rO4B⎛⎝θ2
⎞⎠
⋅O4B cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠⋅O4B sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rBC⎛⎝θ2
⎞⎠
⋅BC cos ⎛⎝θ5⎛⎝θ2
⎞⎠⎞⎠⋅BC sin ⎛⎝θ5
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rO4C⎛⎝θ2
⎞⎠x ⎛⎝θ2
⎞⎠−O4Cy
⎡⎢⎣
⎤⎥⎦
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 22

Se puede observar que la ecuación vectorial (2.6) posee dos incógnitas, una de ellas es la componente x del vector rO4C y la segunda es θ5. Para resolver la ecuación, al igual que en la (2.1), se procede a colocar ambas componentes (X e Y), de la ecuación vectorial, por separado y conformando un par de ecuaciones escalares con dos incógnitas:
X : =+⋅O4B cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠ ⋅BC cos ⎛⎝θ5⎛⎝θ2
⎞⎠⎞⎠ x ⎛⎝θ2⎞⎠ (2.7)
Y : =+⋅O4B sin ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠ ⋅BC sin ⎛⎝θ5⎛⎝θ2
⎞⎠⎞⎠ −O4Cy (2.8)
Este sistema de ecuaciones puede ser resuelto fácilmente despejando θ5 de la ecuación (2.8):
≔θ5⎛⎝θ2
⎞⎠ asin⎛⎜⎝―――――――――
−−O4Cy ⋅O4B sin ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠
BC
⎞⎟⎠
(2.9)
Esta última ecuación involucra una función arcoseno, cuyos resultados deben ser revisados y corregidos en función del cuadrante en el que se encontraría el vector rBC. Sin embargo, se puede observar en la figura del mecanismo, que el mencionado vector aparentemente siempre se encontrará en el cuarto cuadrante, en el cual el arcoseno siempre arroja resultados correctos, por lo cual no es necesario corregir el ángulo θ5.
De la ecuación (2.7) se obtiene la coordenada X del vector rO4C lo cual constituye la expresión final necesaria para hallar la posición del punto C en función de θ2.
≔x ⎛⎝θ2⎞⎠ +⋅O4B cos ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠ ⋅BC cos ⎛⎝θ5
⎛⎝θ2⎞⎠⎞⎠
=θ5
⎛⎜⎜⎜⎜⎜⎝
0
60
120
200
290
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
⎞⎟⎟⎟⎟⎟⎠
−32.301
−24.663
−24.663
−35.366
−31.142
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
Las posiciones que toma el punto C para los ángulos θ2 solicitados en el enunciado son:
=x
⎛⎜⎜⎜⎜⎜⎝
0
60
120
200
290
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
⎞⎟⎟⎟⎟⎟⎠
30.112
55.753
80.564
98.967
32.93
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
Estos valores son las coordenadas X tomando como referencia a O5.
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 23

REPRESENTACIÓN GRÁFICAA continuación se representan los vectores rOA, rAB y rBC en un sistema coordenado cartesiano para los dos ángulos 2.
Para:
≔θ2 290
-150
-120
-90
-60
-30
0
30
-210
-180
60
-60 -40 -20 0 20 40 60 80-100 -80 100
rOAy⎛⎝θ2
⎞⎠ (( ))
rABy⎛⎝θ2
⎞⎠ (( ))
rBCy⎛⎝θ2
⎞⎠ (( ))
rOAx⎛⎝θ2
⎞⎠ (( ))
rABx⎛⎝θ2
⎞⎠ (( ))
rBCx⎛⎝θ2
⎞⎠ (( ))
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 24

PROBLEMA 3
Halle mediante el método analítico vectorial las longitudes que deben tener los eslabones 5 y 6 (distancias BC y O6C) para que los siguientes ángulos tomen simultáneamente los siguientes valores: = 320º y 6 = 10º, para la fase cinemática en la cual = 80º.
De la configuración se conocen los siguientes datos:O2A = 65.45 mmO2O4 = 123 mmO4O6 = 174 mmO4B = 198mm
Se puede observar que el mecanismo propuesto se compone por dos mecanismos elementales, el primero, una inversión de un Manivela-Biela-Carro (MBC), el cual se puede identificar entre los puntos O2, A y D; mientras el segundo, un cuadrilátero artículado, se puede identificar entre los puntos O4, B, C y O6. Ambos mecanismos se encuentran relacionados por medio de un par prismático que junta a los eslabones 3 y 4, mateniendo constante el ángulo de 60º mostrado en la figura.Por lo tanto, para resolver este problema deben plantearse dos ecuaciones de lazo vectorial.
≔O2A 65.45 ≔θ2 80
≔O2O4 123 ≔θ5⎛⎝θ2
⎞⎠ 320
≔O4O6 174 ≔θ6⎛⎝θ2
⎞⎠ 10
≔O4B 198
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 25

La primera ecuación de lazo se plantea en el mecanismo MBC:
=+rO2A⎛⎝θ2
⎞⎠ rAD⎛⎝θ2
⎞⎠ rO2D((3.1))
donde:
≔rO2A⎛⎝θ2
⎞⎠
⋅O2A cos ⎛⎝θ2⎞⎠
⋅O2A sin ⎛⎝θ2⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rAD⎛⎝θ2
⎞⎠
⋅AD ((θ2)) cos ⎛⎝θ3⎛⎝θ2
⎞⎠⎞⎠⋅AD ((θ2)) sin ⎛⎝θ3
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
≔O2D O2O4 ≔rO2D
O2D
0
0
⎡⎢⎢⎣
⎤⎥⎥⎦
La ecuación vectorial (3.1) posee dos incógnitas: AD y La ecuación vectorial se coloca a continuación en forma de dos ecuaciones escalares, una para las componentes X y la otra para las componentes Y:
X: =+⋅O2A cos ⎛⎝θ2⎞⎠ ⋅AD ((θ2)) cos ⎛⎝θ3
⎛⎝θ2⎞⎠⎞⎠ O2D ((3.2))
Y: =+⋅O2A sin ⎛⎝θ2⎞⎠ ⋅AD ((θ2)) sin ⎛⎝θ3
⎛⎝θ2⎞⎠⎞⎠ 0 ((3.3))
Este sistema de ecuaciones puede ser resuelto por sustitución, para ello es conveniente despejar la distancia AD de la expresión (3.3) y sustituirla en la (3.2):
=AD ⎛⎝θ2⎞⎠ ――――――
−⎛⎝ ⋅O2A sin ⎛⎝θ2⎞⎠⎞⎠
sin ⎛⎝θ3⎛⎝θ2
⎞⎠⎞⎠((3.4))
La expresión obtenida se sustituye en la (3.2) y se despeja :
≔θ3⎛⎝θ2
⎞⎠ atan⎛⎜⎝―――――――
⎛⎝ ⋅O2A sin ⎛⎝θ2⎞⎠⎞⎠
−⋅O2A cos ⎛⎝θ2⎞⎠ O2D
⎞⎟⎠
((3.5))
=θ3⎛⎝θ2
⎞⎠ −30.001 (330º)
Este resultado indica que el vector que va desde el punto A hasta el punto D, apunta hacia el cuarto cuadrante, lo cual es lógico, por lo tanto no es necesario corregir el resultado.
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 26

Obtenido el ángulo se obtiene ya que la relación entre ambos es constante:
≔θ4⎛⎝θ2
⎞⎠ +θ3⎛⎝θ2
⎞⎠ 120 ((3.6))
=θ4⎛⎝θ2
⎞⎠ 89.999
Con el ángulo como dato de entrada, a continuación se plantea la siguiente ecuación de lazo vectorial.
=+rO4B rBC +rO4O6 rO6C((3.7))
donde:
≔rO4B
⋅O4B cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠⋅O4B sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rBC
⋅BC cos ⎛⎝θ5⎛⎝θ2
⎞⎠⎞⎠⋅BC sin ⎛⎝θ5
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
≔rO4O6
O4O6
0
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rO6C
⋅O6C cos ⎛⎝θ6⎛⎝θ2
⎞⎠⎞⎠⋅O6C sin ⎛⎝θ6
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
La ecuación vectorial (3.7) posee dos incógnitas: BC y O6C. Para resolverla, la ecuación vectorial se coloca a continuación en forma de dos ecuaciones escalares, una para las componentes X y la otra para las componentes Y:
X: =+⋅O4B cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠ ⋅BC cos ⎛⎝θ5⎛⎝θ2
⎞⎠⎞⎠ +O4O6 ⋅O6C cos ⎛⎝θ6⎛⎝θ2
⎞⎠⎞⎠ ((3.8))
Y: =+⋅O4B sin ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠ ⋅BC sin ⎛⎝θ5⎛⎝θ2
⎞⎠⎞⎠ ⋅O6C sin ⎛⎝θ6⎛⎝θ2
⎞⎠⎞⎠ ((3.9))
Este sistema de ecuaciones puede ser resuelto por sustitución.
((3.10))≔BC ―――――――――
+O4O6 ――――O4B
tan ⎛⎝θ6⎛⎝θ2
⎞⎠⎞⎠
−cos ⎛⎝θ5⎛⎝θ2
⎞⎠⎞⎠ ――――sin ⎛⎝θ5
⎛⎝θ2⎞⎠⎞⎠
tan ⎛⎝θ6⎛⎝θ2
⎞⎠⎞⎠
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 27

≔O6C ――――――――+O4B ⋅BC sin ⎛⎝θ5
⎛⎝θ2⎞⎠⎞⎠
sin ⎛⎝θ6⎛⎝θ2
⎞⎠⎞⎠((3.11))
=BC 293.986
=O6C 51.997
Estas son las longitudes que deben tener los eslabones 5 y 6 en el mecanismo para que se cumpan los requerimientos iniciales..
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 28

PROBLEMA 4
Para el mecanismo de la figura hallar:a) el vector posición del punto C, con respecto a O2 Cuando el ángulo y vale 260º,b) el mismo vector cuando el eslabón 4 toma las posiciones extremas,c) la carrera del punto C y la razón de tiempos.
≔ 2
≔ 4
≔ 4
Dimensiones en mm
El mecanismo ilustrado se basa en un cuadrilátero artículado (mecanismo de cuatro barras), por lo tanto es conveniente verificar si cumple con la Ley de Grashoff:
≔ ‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾+202 2
302 2
= 3.606
=+ 6 La suma de las longitudes de los eslabones más corto y más largo
=+ 7.606 Suma de las longitudes de los otros dos eslabones
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 29

Como se puede observar el mecanismo cumple la Ley de Grashoff, ya que la suma de los eslabones más largo y más corto es menor que la suma de las longitudes de los otros dos eslabones. Además se puede observar que el eslabón bancada se conecta al eslabón más corto. Estas observaciones permiten asegurar que el eslabón 2 se comporta como una manivela y que el mecanismo de cuatro barras es un Manivela-Biela-Balancín.
Parte a:
Para resolver el problema planteado es necesario plantear una ecuación de lazo vectorial, para el macanismo de cuatro barras, posteriormente se debe emplear una segunda ecuación de lazo vectorial para hallar el vector posición pedido.La primera ecuación de lazo vectorial:
=+rO2A⎛⎝θ2
⎞⎠ rAB⎛⎝θ2
⎞⎠ +rO2O4 rO4B⎛⎝θ2
⎞⎠ ((4.1))
donde:
≔⎛⎝ ⎞⎠
⋅ cos ⎛⎝ ⎞⎠⋅ sin ⎛⎝ ⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
≔
3
−2
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=⎛⎝ ⎞⎠
⋅AB cos ⎛⎝θ3⎛⎝θ2
⎞⎠⎞⎠⋅AB sin ⎛⎝θ3
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=⎛⎝ ⎞⎠
⋅O4B cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠⋅O4B sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
La ecuación vectorial (4.1) posee dos incógnitas: y La ecuación vectorial se coloca a continuación en forma de dos ecuaciones escalares, una para las componentes X y la otra para las componentes Y, el sistema de ecuaciones que resulta es no lineal, por lo cual debe ser resuelto con la ayuda de métodos numéricos (Newton Raphson por ejemplo). En este caso, bajo el ambiente de Mathcad Prime 2.0 se emplea un bloque de resolución:
≔ 260
Valo
res
de p
rueb
aRe
stric
cion
esSo
lver
≔ −30
≔ 90
X: =+⋅O2A cos ⎛⎝θ2⎞⎠ ⋅AB cos ⎛⎝θ3
⎞⎠ +3 cm ⋅O4B cos ⎛⎝θ4⎞⎠
Y: =+⋅O2A sin ⎛⎝θ2⎞⎠ ⋅AB sin ⎛⎝θ3
⎞⎠ +−2 cm ⋅O4B sin ⎛⎝θ4⎞⎠
≔⎡⎢⎣
⎤⎥⎦
=⎛⎝ , ⎞⎠64.744
114.215
⎡⎢⎣
⎤⎥⎦
((4.2))
((4.3))
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 30

≔⎛⎝ ⎞⎠ =⎛⎝ ⎞⎠ 64.744
≔⎛⎝ ⎞⎠ =⎛⎝ ⎞⎠ 114.215
Resuelta la primera ecuación de lazo vectorial, a continuación se plantea una segunda ecuación de lazo vectorial:
=rO2C +rO2O4 rO4C((4.4))
donde:
=rO2C⎛⎝θ2
⎞⎠
O2C_x ⎛⎝θ2⎞⎠
4 cm
0
⎡⎢⎢⎣
⎤⎥⎥⎦
≔
3
−2
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rO4C⎛⎝θ2
⎞⎠
⋅O4C ⎛⎝θ2⎞⎠ cos ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
⋅O4C ⎛⎝θ2⎞⎠ sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
A continuación se plantea el sistema de ecuaciones que resulta de la ecuación (4.4):
X: =O2C_x ⎛⎝θ2⎞⎠ +3 cm ⋅O4C ⎛⎝θ2
⎞⎠ cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠ ((4.5))
Y: =4 cm +−2 cm ⋅O4C ⎛⎝θ2⎞⎠ sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠ ((4.6))
Despejando O4C de la ecuación (4.6):
≔⎛⎝ ⎞⎠ ―――――+4 2
sin ⎛⎝ ⎛⎝ ⎞⎠⎞⎠((4.7))
=⎛⎝ ⎞⎠ 6.579
A continuación se calcula O2C_x en la ecuación (4.5):
≔⎛⎝ ⎞⎠ +3 ⋅⎛⎝ ⎞⎠ cos ⎛⎝ ⎛⎝ ⎞⎠⎞⎠
=⎛⎝ ⎞⎠ 0.302
El vector pedido es:
≔⎛⎝ ⎞⎠
⎛⎝ ⎞⎠4
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=⎛⎝ ⎞⎠
0.302
4
0
⎡⎢⎢⎣
⎤⎥⎥⎦
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 31

Parte b:
Para hallar el vector posición del punto C, con respecto a O2, es necesario determinar el ángulo para cada posición extrema, tal y como se observa en las ecuaciones (4.5) y (4.6)
Observando cuidadosamente el mecanismo, resulta evidente que las posiciones extremas del mecanismo determinan las posiciones extremas del punto C, ya que éste se encuentra vinculado al balancín.
Se conoce que las posiciones extremas de un mecanismo Manivela-Biela-Balancín, se producen cuando la manivela y la biela se encuentran alineadas (extendidas o superpuestas), por lo tanto, se pueden hallar los angulos correspondientes haciendo un análisis geométricode ambas posiciones extremas.
Para lograr la posición extrema izquierda del punto C, la manivela y la biela se deben encontrar alineadas superpuestas, transformando al cuadrilátero artículado en un triángulo, tal y como muestra la figura de la derecha. En dicho triángulo es posible hallar el ángulo empleando la ley del coseno, de la aplicación de esta última se tiene:
≔ acos⎛⎜⎝――――――
++−42
22
3.6062
⋅⋅2 2 3.606
⎞⎟⎠
= 86.012
Debido a que el ángulo que forma la línea O2O4 con el semieje positivo de las X's es constante (), éste se emplea como referencia:
≔ atan⎛⎜⎝―――−2
3
⎞⎟⎠
= −33.69
El ángulo para la posición extrema izquierda se encuentra de la siguiente forma:
≔ ++ 180 = 232.322
Para el de la posición extrema derecha se procede de forma similar. A la derecha puede observarse del triángulo en el que se transforma el cuádrilatero artículado luego de que la manivela y la biela se encuentran alineadas extendidas.
Para hallar el ángulo se hace uso nuevamente de la ley del coseno, resultando lo siguiente:
≔ acos⎛⎜⎝――――――
++−42
62
3.6062
⋅⋅2 6 3.606
⎞⎟⎠
= 40.298
El ángulo para la posición extrema derecha se encuentra de la siguiente forma:
≔ + = 6.608
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 32

A continuación se emplean las ecuaciones (4.2) y (4.3), en un bloque de resolución, para hallar losángulos y para cada posición extrema. Posteriormente se calculan los vectores que definen la posición del punto C para cada posición extrema por medio de las ecuaciones (4.5) y (4.7).
Posición extrema izquierda:
Valo
res
de p
rueb
aRe
stric
cion
esSo
lver
≔
≔ −30
≔ 90
X: =+⋅O2A cos ⎛⎝θ2⎞⎠ ⋅AB cos ⎛⎝θ3
⎞⎠ +3 cm ⋅O4B cos ⎛⎝θ4⎞⎠
Y: =+⋅O2A sin ⎛⎝θ2⎞⎠ ⋅AB sin ⎛⎝θ3
⎞⎠ +−2 cm ⋅O4B sin ⎛⎝θ4⎞⎠
≔⎡⎢⎣
⎤⎥⎦
=⎛⎝ , ⎞⎠52.328
116.39
⎡⎢⎣
⎤⎥⎦
≔
≔⎛⎝ ⎞⎠ ―――――+4 2
sin ⎛⎝ ⎞⎠=⎛⎝ ⎞⎠ 6.698
≔⎛⎝ ⎞⎠ +3 ⋅⎛⎝ ⎞⎠ cos ⎛⎝ ⎞⎠
=⎛⎝ ⎞⎠ 0.023
El vector pedido es:
≔⎛⎝ ⎞⎠
⎛⎝ ⎞⎠4
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=⎛⎝ ⎞⎠
0.023
4
0
⎡⎢⎢⎣
⎤⎥⎥⎦
Posición extrema derecha:
Valo
res
de p
rueb
aRe
stric
cion
esSo
lver
≔
≔ −30
≔ 90
X: =+⋅O2A cos ⎛⎝θ2⎞⎠ ⋅AB cos ⎛⎝θ3
⎞⎠ +3 cm ⋅O4B cos ⎛⎝θ4⎞⎠
Y: =+⋅O2A sin ⎛⎝θ2⎞⎠ ⋅AB sin ⎛⎝θ3
⎞⎠ +−2 cm ⋅O4B sin ⎛⎝θ4⎞⎠
≔⎡⎢⎣
⎤⎥⎦
=⎛⎝ , ⎞⎠6.605
42.265
⎡⎢⎣
⎤⎥⎦
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 33

≔
≔⎛⎝ ⎞⎠ ―――――+4 2
sin ⎛⎝ ⎞⎠=⎛⎝ ⎞⎠ 8.921
≔⎛⎝ ⎞⎠ +3 ⋅⎛⎝ ⎞⎠ cos ⎛⎝ ⎞⎠
=⎛⎝ ⎞⎠ 9.602
El vector pedido es:
≔⎛⎝ ⎞⎠
⎛⎝ ⎞⎠4
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=⎛⎝ ⎞⎠
9.602
4
0
⎡⎢⎢⎣
⎤⎥⎥⎦
Parte c:
Para calcular la carrera del punto C, se debe hacer la diferencia entre las componentes X's de los vectores que definen la posición del punto C:
≔ −⎛⎝ ⎞⎠0
⎛⎝ ⎞⎠0
= 9.579
Por último, se debe hallar la razón de tiempos del mecanismo. Como se observa en la figura de la derecha, se deben hallar los ángulos que "barre" la manivela entre ambas posiciones extremas.
≔ −
≔ −360
= 225.714
= 134.286
≔ ――――― = 1.681
Como se puede observar el mecanismo es de retorno rápido, ya que el punto C realiza la carrera de retorno 1.681 veces más rápido que la carrera de trabajo.
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 34

PROBLEMA 5
En el mecanismo de la figura, se desea hallar la posición del punto Q, con respecto a O2, cuando θ2 = 120º. El punto C es el centro del segmento de círculo sobre el cual se desplaza el carro (eslabón 3).
≔O2O4 20
≔O2P 15
≔O4C 22
≔θ2 120
≔CP O4C
≔CQ O4C
El mecanismo ilustrado es una inversión del mecanismo Manivela-Biela-Carro (MBC) con trayectoria curva del par P.
Para resolver el problema, en primer término, se debe plantear una ecuación de lazo vectorial, que tome en cuenta los puntos O2, P, O4 y C:
=rO2P ++rO2O4 rO4C rCP (5.1)
donde:
≔rO2P⎛⎝θ2
⎞⎠
⋅O2P cos ⎛⎝θ2⎞⎠
⋅O2P sin ⎛⎝θ2⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
≔rO2O4
−O2O4
0
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rO4C⎛⎝θ2
⎞⎠
⋅O4C cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠⋅O4C sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
=rCP⎛⎝θ2
⎞⎠
⋅CP cos ⎛⎝β ⎛⎝θ2⎞⎠⎞⎠
⋅CP sin ⎛⎝β ⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
El ángulo se forma entre la línea CP y el semieje positivo de las X's.Esta ecuación se escribe a continuación como dos ecuaciones escalares, una para cada componente, el rsultado es un sistema de ecuaciones no lineal, el cual se resuelve a continuación con un bloque de resolución:
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 35

Valo
res
de p
rueb
aRe
stric
cion
esSo
lver
≔β 90
≔θ4 −20
X: =⋅O2P cos ⎛⎝θ2⎞⎠ ++−O2O4 ⋅O4C cos ⎛⎝θ4
⎞⎠ ⋅CP cos ((β))
Y: =⋅O2P sin ⎛⎝θ2⎞⎠ +⋅O4C sin ⎛⎝θ4
⎞⎠ ⋅CP sin ((β))
≔B
θ4
⎡⎢⎣
⎤⎥⎦
=⎛⎝ ,β θ4⎞⎠
111.9148
−19.7105
⎡⎢⎣
⎤⎥⎦
((5.2))
((5.3))
≔β ⎛⎝θ2⎞⎠ B
≔θ4⎛⎝θ2
⎞⎠ θ4
Una vez resuelto el sistema, el vector posición pedido se halla por medio de una suma de vectores:
≔rO4C⎛⎝θ2
⎞⎠
⋅O4C cos ⎛⎝θ4⎛⎝θ2
⎞⎠⎞⎠⋅O4C sin ⎛⎝θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
≔rCQ⎛⎝θ2
⎞⎠
⋅CQ cos ⎛⎝ +90 θ4⎛⎝θ2
⎞⎠⎞⎠⋅CQ sin ⎛⎝ +90 θ4
⎛⎝θ2⎞⎠⎞⎠
0
⎡⎢⎢⎣
⎤⎥⎥⎦
≔rO2Q⎛⎝θ2
⎞⎠ ++rO2O4 rO4C⎛⎝θ2
⎞⎠ rCQ⎛⎝θ2
⎞⎠ ((5.4))
=rO2Q⎛⎝θ2
⎞⎠
8.1309
13.2911
0
⎡⎢⎢⎣
⎤⎥⎥⎦
El modelado en Working Model se puede ver a continuación, donde se pueden observar las coordenadas del punto Q cuando el eslabón 2 adquiere una inclinación de 120º. Se puede observar que son las mismas calculadas anteriormente.
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 36

PROBLEMA 6
En el mecanismo que se ilustra a la derecha, encuentre analíticamente, por medio de ecuaciones vectoriales, la carrera del punto C y la razón de tiempos del mecanismo.
De la configuración se conoce lo siguiente:
≔O2O4 20 (completamente vertical)
≔O2A 7
≔AB 20
≔BC 30
≔O4B 25
≔BC 30
Resultados:
Carrera de C = 23.26 cm
Razón de tiempos = 1.46
PROBLEMA 7
En el mecanismo de la figura, encuentre analíticamente, por medio de ecuaciones vectoriales, la carrera del punto C y la razón de tiempos del mecanismo.
De la configuración se conoce lo siguiente:
≔O2A 2
≔O2O4 3 (horizontal)
≔O4B 3
≔BC 4
Resultados:
Carrera de C = 1.48cm
Razón de tiempos = 2.74 cm
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 37

PROBLEMA 8
En el mecanismo que se ilustra a la derecha, encuentre analíticamente, por medio de ecuaciones vectoriales:
a) los ángulos 5 que adquiere el eslabón 5, cuando el eslabón toma las posiciones que se corresponden con los ángulos:2 = 0º, 120º, 220º y 300º.
b) los ángulos 5 que acotan el movimiento oscilatorio del eslabón 5 (posiciones extremas).
De la configuración se conoce lo siguiente:
≔O2A 5
≔O4B 4.5
≔O2O4 7 (vertical)
Resultados:
5 = 103.78º, 73.35º, 81.98º y 94.86º
El eslabón 5 se mueve entre los ángulos 5 = 72.43º y 107.58º
PROBLEMA 9
En el mecanismo de la figura el ángulo de la manivela 2, con respecto al semieje positivo de las X's es 2 = 120°. Encuentre la posición del punto D (con respecto a O2) y los ángulos que forman los eslabones 3, 4, 5 y 6 con respecto al semieje positivo de las X's. O2B = 150 mm, O2O4 = 450 mm, BD = 700 mm, La = 100mm y Lb = 200 mm.
≔O2B 150
≔O2O4 450
≔BD 700
≔Lx 100
≔Ly 200
Resultados:
=θ3 19.1 deg
=θ4 θ3
=θ6 238.07 deg
=θ5 θ6
=rO2D
736.4
−99.23
0
⎡⎢⎢⎣
⎤⎥⎥⎦
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 38

PROBLEMA 10
En la figura se representa una máquina remachadora, en la cual el movimiento de rotación suministrado por un motor en el eslabón 2, es transformado en un movimiento alternativo en el eslabón 6, el cual, produce la fuerza necesaria para remachar al acercarse al eslabón 1.
a) Encuentre las distancias BC y CD, si el mecanismo se encuentra ilustrado en una de sus fases cinemáticas, en la cuál los eslabones 2 y 4 toman los ángulos, con respecto al semieje positivo de las X's, que se muestran.b) Con la distancia BC calculada en la parte a), encuentre la posición (2) que toma la manivela cuando el eslabón 6 se encuentra en la posición más baja que puede tomar cuando se realiza el ciclo cinemático.
≔O2A 9
≔AB 32
BD_16cm
≔θ2 45
≔θ4 63
Resultados:
a) =BC 22.87 cm Se debe tener cuidado al resolver el sistema de ecuaciones, ya que el sistema tiene dos soluciones, pero solo una de ellas es válida para el mecanismo ilustrado.
=CD 8.21 cm
b) =θ2 118.5 deg
Problemas de Teoría de Máquinas y Mecanismos Cinemática
Prof. Sebastián E. Provenzano R. 39