Chapter Three
23
51 Chapter Three Finite Element 3-1 Background and applications:- The finite element method (FEM) is not new technique; it was first Introduction in the 19 and has been continually developed and improved then. It is now an extremely sophisticated tool for solving numerous engineering problems and is widely used and accepted in many branches of industry. Its development has not been paralleled by any other numerical analysis techniques and experiment testing meth ods redundant. Clearly the areas of applications and the potential of FEM are enormous. The growth of the technique is attributable directly to the rapid advance in computer technology and computing power. The number and size of software comparies developing and supporting commercial finite element packages has grown to meet the demand for the programs, it is now a multimillions dollars industry itself. There are three broad problem areas that can be investigated by the FEM; these are I. Steady state problems. II. Eigen value problems steady with time . III. Transient problems.
Transcript of Chapter Three

51
Chapter Three
Finite Element
3-1 Background and applications:-
The finite element method (FEM) is not new technique; it
was first Introduction in the 19 and has been continually
developed and improved then. It is now an extremely
sophisticated tool for solving numerous engineering problems
and is widely used and accepted in many branches of industry. Its
development has not been paralleled by any other numerical
analysis techniques and experiment testing meth ods redundant.
Clearly the areas of applications and the potential of FEM are
enormous. The growth of the technique is attributable directly to
the rapid advance in computer technology and computing power.
The number and size of software comparies developing and
supporting commercial finite element packages has grown to
meet the demand for the programs, it is now a multimillions
dollars industry itself. There are three broad problem areas that
can be investigated by the FEM; these are
I. Steady state problems.
II. Eigen value problems steady with time .
III. Transient problems.

51
3-2 Method of solution of boundary value
problem(Bvp)
A (BVP) is one which governed by one or more differential
equation (D.E.) whichin a specified domain and by boundary
conditions on the periphery of that domain.
Ø= field variable it could be:-
Scalar (Temperature, Pressure, density, viscosity)
Vector (Velocity, displacement, acceleration, …..)
Tensor ( Stress, Strain, ……)
Ø (S)- steady state problems, s= space dimension (1D, 2D or 3D)
Ø (S, t) –Transient problem t=time Generally speaking, the
methods of solution of BVP may be classified as follows
BVP Methods of solution
-Direct Integration
-Separation Of Variables
-Fourier Trans Forms
-Laplace Trans Forms
-Infinites Series
Exactor Closed Solution Approximate Solution
Trial functions FDM
Weighted residual A Varitional Approach
-Rayleigh-Ritz method -Galerkin method
1870-1909 -Point least squares
-Point collocation method
-Integration least
FEM
BEM

51
3-3 Calculus of variation:-
A simple problem in the theory of the Calculus of variation
seeks to find a function u (x) that minimizes the integral ;
∫ )
(x),….)dx ,………………(1-1)
In this simple problems, we will also specify the values of u(x)at
x1 and x2 that is, bounds conditions
U(x1)=u1
U(x2)=u2………………………………….…...(1-2)
To Find u(x) ,we are going to consider every possible function
that satisfies equ.(1-2). From all these possible function we will
be seeking the one that gives its minimum value. This set of
possible function may be represented simply by W( X,£) where,
W(X,£) =u(x) + £ (x)
(X,£) = (x) + £ (x)………………………(1-3)
Where:-
u(x)=Desired Function that minimize
(x)=variation of u(x)= u
(x)=Any continuously differentially function(x)
£=parameter controls the difference between u&w
The functions u(x) and w(x,£) are shows in Fig .(1-1)
51
W(x,£)
u2=w2
u1=w1
x
x1 x2
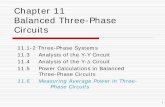
Fig(1-1): Desired variational solution u(x) and trial function to
ensure that all w(x,£)have the correct value at x1 and x2 ,that is ,
W(x1,£)=u(x1)………………………..(1-4)
W(x2,£)=u(x2)
We must insist that is;
(x1)= (x2)= 0……………………….(1-5)
Notice that the function we are seeking is include in complete set
of possible functions given by equ.(1-3). The Desired function is
the one for which ( ) thus;
W(x,o) = u(x) ……………………………( 1-6 )
Now, we can write ( ) of equ (1-1) as;
∫ )
(X,£) dx ,…………(1-7)
Curve which
Minimize
State1
State2

51
Observe that this integral is a function of (£) and when (£=0),
equ.(1-7)
Reduces to equ(1-1) with the aid of (1-6).this means that we
want ) have a minimum when (£=0)
To find a minimum of ),we must first differentiate it
w.r.t.(£).since the limits of integration are not function of (£), we
may use Leibnitz rule to write;
)
∫
)
(X,£)dx ……..(1-8)
The chain rule of calculus may now be employed to give:-
)
∫ [
]
dx ,…….…….(1-9)
But;
= (x)
And
= (x)=
)
Thus;
)
∫ [
)
)
]
dx ,……….(1-10)
The second term may be integrated by parts gives
)
∫ [
)
)]
∫ )
.
.…….(1-11)
The integrated term vanishes with the aid equ.(1-5)thus;
)
∫ ) [
)]
. .………(1-12)

02
We will now insist that this be equal to zero when ( £=0) so that
(0) will be minimum .thus
∫ ) [
)]
. .…(1-13)
Observe that , from equ.(1-3) when Є=0 ,when w(x,Є)=u(x)
and (x,Є)= (x).
Since }(x) is arbitrary, the term in square bracelets in equ.(1-
13)must be zero to ensure this integral will be zero .therefore
,for( )to be aminimum;
(
) …………….(1-14) Euler log range equ.
This differential equation is called the Euler Lagrange equation.
its B.es in this simple problem are given by equ.(1-2)> the
solution u(x) to this differential equation will be the functionthat
minimizes the original integral
In equ.(1-3),ʅ(x) represents the variation of u(x), that is ( u) .In
their words, we may write
=∫ [
)]
u dx………...............(1-15)
Or in a general form;
=∫ ) )
u dx=0……….(1-16)
Where ( ) is the functional or variational statement and
Lu(x)=P(x)……. ……………………....(1-17)
Is the differential equation of the problem considered, sin u the
Euler Lagrange equation in equ. (1-15) is the variation of original
differential equation
Ex: find the function u(x) which minimize the integral

05
∫
) with u(o)=o+ u (
)=1
Sol: by comparing with equ.(1-1); the function (f) is
F=
( )
Now
&
Substitute into Euler Lagrange equ.(1-14)
-u-
)
Thus,the function u(x) which minimizes is the function which
satisfied equ.(1) and the B.CS. The and
∫ )
any other function foru(x)
that satisfied only B.CS.(Not Euler equ) would give larger value
for this in for Example (u(x)= 2x/ ) gives ( =0.0565).
00
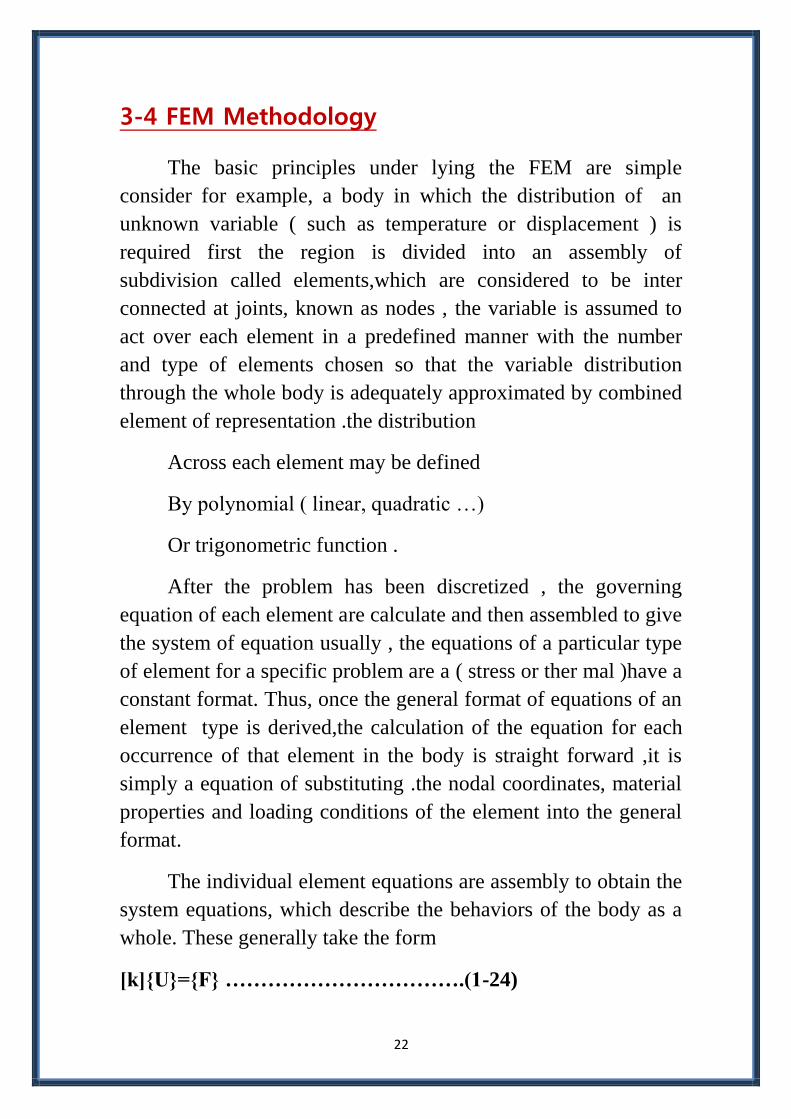
3-4 FEM Methodology
The basic principles under lying the FEM are simple
consider for example, a body in which the distribution of an
unknown variable ( such as temperature or displacement ) is
required first the region is divided into an assembly of
subdivision called elements,which are considered to be inter
connected at joints, known as nodes , the variable is assumed to
act over each element in a predefined manner with the number
and type of elements chosen so that the variable distribution
through the whole body is adequately approximated by combined
element of representation .the distribution
Across each element may be defined
By polynomial ( linear, quadratic …)
Or trigonometric function .
After the problem has been discretized , the governing
equation of each element are calculate and then assembled to give
the system of equation usually , the equations of a particular type
of element for a specific problem are a ( stress or ther mal )have a
constant format. Thus, once the general format of equations of an
element type is derived,the calculation of the equation for each
occurrence of that element in the body is straight forward ,it is
simply a equation of substituting .the nodal coordinates, material
properties and loading conditions of the element into the general
format.
The individual element equations are assembly to obtain the
system equations, which describe the behaviors of the body as a
whole. These generally take the form
[k]{U}={F} …………………………….(1-24)

02
Where [k] is a square matrix ,known as the stiffness matrix; {U}
is the vector of unknown nodal displacements or temperatures;
and {F}is the vector of applied nodal forces. After applying the
boundary condition into (1-24), the resulting system of equations
are then solved , for the unknown nodal values
3-5 Steps of FEM Implementation
1- Variational statement of the problem.
2- Discretization of the domain.
3- Shape function and Interpolations.
4- Element equations.
5- Assembly of element equations.
6- Incorporation of Boundary conditions.
7- Solution of the equations.
8- Further calculations and maripulations.
3-6 Shape functions and Interpolations
Introduction :-
The FEM works by assuming a given distribution of the un
known variables through each element . The equation ,defining
the approximating distribution are known as (( inter pollution
function )) ,and can take any mathematical form, although in
practice they are usually polynomials. Polynomials are popular
because they are easy to for emulate and computerized ,and in
particular their differentiation and integration are straight for war
to implement on computer . with polynomials functions the
accuracy of the analysis can also be simply improved by
increasing the order of the polynomial off course, there is a price
to pay for the increase accuracy as the order of the Interpolation
function increases .

02
Typically , a quadratic element will require two or three
times the a mount of computer time that a linear element will
need. In some problems therefore, it may be more economical to
use a finer mesh of linear elements. For 1D thermal rod ,we may
write the following Interpolation functions
Linear: T= + X X
Quadratic: T= + X+ X2
Cubic: T= + X+ X2 + X
3
For 2D problem ,the following Interpolation functions may be
written:
Linear: T= + X + y
Quadratic: T= + X+ y+ Xy+ X2 + y
2
Note: for 2D element ,Pascale's Triangle may be used.
Linear: T= + X + y
Quadratic: T= + X+ y+ Xy+ X2 + y
2
Cubic: T= + X+ y+ Xy+ Xy2+ yx
2 +
X2+ y
2+ X
3+ y
3
Usually, there is no requirement to use pure linear quadratic or
cubic types of functions.
The 2D polynomic( T= + X+ y+ Xy )is Avery popular
Interpolation function. If has four un known constants with four
nodes defining a rectangular element

01
3-7 Linear Interpolation polynomials for simplex
Element
In this section two and three dimensional simplex elements
are introduced in which each element is identified by general
node labels such as I ,j and k . In modeling ,these labels are
substituted by the real node numbers . The location of the first
and last node is immaterial, provided that the elements are
labeled consistently for example, in an antic lock wise direction
for 2D triangular element.
The 1D simplex Element
The general form of the Interpolation function is ;
Ø= + X …………………( 1-25)
At x=xi Ø=Øi
x=xj Ø=Øj
=
=
=
=
Hence
=
+
x …………(1-26)
Or
=
+
Øj …..………(1-27)
Or
Ø= Ni Øi +NjØj= [ N ] {Ø } ……………(1- 28)

01
Where (Ni ) and (Nj) are called (( Shape function)) .Each
Shape function is associated with one particular node identified
by the subscript .It is a property of a Shape function that it equals
unity at its own assigned node and zero at the other nodes of the
element . Also, the sum of all the Shape functions at any point in
an element equals one. For convenience the Shape functions are
stored in a Shape function matrix [N] ,and the node variables are
stored in a vector {Ø } . Note that the Shape function ,like the
original interpolation polynomial , are linear function of x. It is
always the case that the Shape function are polynomials of the
same order as the interpolation function, see Fig (1.4).
N
Ni Nj Ni NK Nj
Xi Xj Xi Xk Xj
Fig (1.4): variation of the Shape function for 1D element.
X X

01
3-8 Natural coordinates ( local coordinates )
When the governing elements equations are derived in next
section , it will be found that many turns need to be calculated by
the integration of function of the Shape function [N]. This is not
difficult since the Shape function are simple turns of (x,y) and (Z)
but it can be made even easier by the introduction of natural
(local ) . coordinates these are coordinate system that are local
(i.c. individual ) to each element but are dimensionless and have a
maximum absolute magnitude of unity .
1-D Natural coordinates
For a 1-D element A point P is identified by two natural
coordinates:
L1=
1-
=1-
L1=
-0 =
Looking back to equ. (1-27 ) it is clear that the natural ( local )
coordinates are directly equivalent to the Shape function for the
element that is
L1= Ni =1-
L2= Nj= …………….(1-41)
Instead of the variation of Ø through the element the natural
coordinates can be used to describe the geometry of the element.
This is of little value for 1-D element but 2D and 3D elements
and particularly higher order elements it is very important
concept . in 1D element:

01
X= L1 Xi +L2 Xj= Ni Xi + NjXj………………..( 1-42 )
It has been proved that the integration over the element of
function incorporating L1 and L2 raised to the powers and P
can be easily calculated by applying the formula
Therefore sohce (L1= Ni) and (L2=Nj)the same equation can also
be applied when integrating function of Shape functions.
2-D local coordinates
When the concept of natural coordinates is applied to 2D. the
result is an area ( triangular ) coordinate
L1=A1 1A L2=A2 1A L3=A31A…………..( 1-44)
A1+ A2+A3=A
Or
+
+
=L1+L2+L3= 1
A1=A PjK
A=total area
Also
L1=Ni L2=Nj L3=Nk
And
X= L1Xi+L2Xj+L3Xk
Y= L1Yi+ L2Yj+ L3Yk
Also
A2
A1
A3
i
j
k
P

01
∫
)
Where (H) is the distance between two nodes on aside of the
element and
∫
)
)
Ex.(1-4): the stiffness inatxix of the element a2-D field problem
is to be evaluated
H ∫ [
]
dA
sol:
∫ ∫
∫
)
∫ ∫
)
Hence we can show not the integral will equal to:
[
]

22
3-9 Assembly of Element Equations
Assembly of Element Equations into the system Equations
is simply question of adding the coefficients of each element
stiffness matrix into the corresponding places of the global
stiffness matrix and summing the force vector coefficients of
each element force vector into the ( global force vector )the
processes are the same regardless of the type of problem and the
number and type of element used.
The easiest way to assemble the element is to label each raw
and column of the( nnexnne ) element matrix ( nne=ho. Of nodes
n element) with its corresponding degree of freedom ( Øi ,i=1 to
nne) And then to work through the coefficients of the matrix,
adding each into the (nnxnn) global matrix (nn=total no. of
nodes) which has been similarly labeled. the same way is done
with the force vector.
Element equation= Ke]nnexnne{
}nnex1={Fe}nnex1 K=∑
e
element equation = K]nnexnne { }nnex1={F}nnex1 F=∑
e
for example consider the mesh shown in the figure assume for
the sake of this example that the element equations of the first
three elements are:
element(1)
[
]
{
}
={ }
Global numbering
9
1
3
7
2
4
6
8
1
(2)
(3) (4)
(8)
(1)
(6)
(7)
(1)
5
25
Local numbering
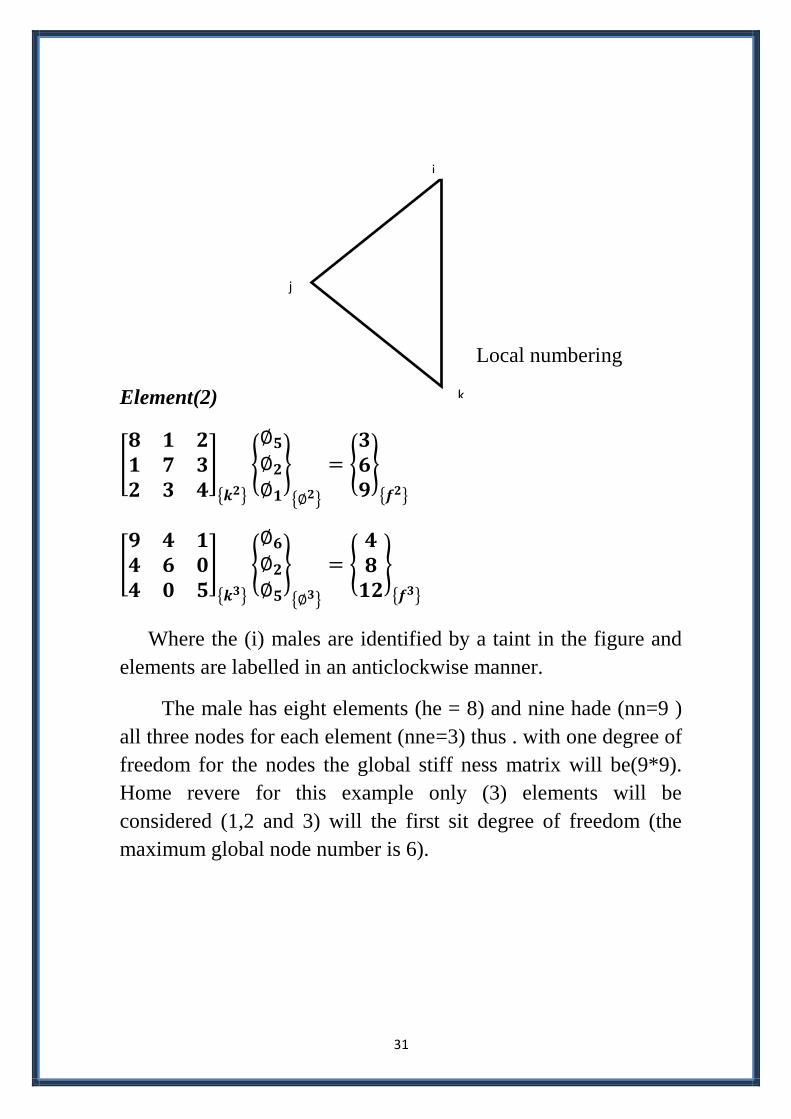
Element(2)
[
]
{ }
{
}
{ }
{ }
{ }
[
]
{ }
{
}
{ }
{
}
{ }
Where the (i) males are identified by a taint in the figure and
elements are labelled in an anticlockwise manner.
The male has eight elements (he = 8) and nine hade (nn=9 )
all three nodes for each element (nne=3) thus . with one degree of
freedom for the nodes the global stiff ness matrix will be(9*9).
Home revere for this example only (3) elements will be
considered (1,2 and 3) will the first sit degree of freedom (the
maximum global node number is 6).
i
j
k

20
i.e. the resulting fort of the global matrix and vector will be (6x6)
and (6x1) respectively.
Element (1): the rows and columns are identified in order (1-4-5)
is the (node) and (4) and (5) follows an anti cloclc wise direction.
The matrix and vectors of the element are added into the empty
global matrix and vector as follows
[
]
[
]
[K1] [K] global
{ }
{
}
{
Element (2)
[
]
[ )
)
)
)
]
[K2] [K]

22
{ }
{
}
{F2} {F}global
Element (3)
[
]
[ )
)
)
)
]
[K3] [K]global
{
}
{
}
{F3} {F}global
Thus the find global equation will be

22
[
]
{
}
{
=
{
}
{
Note that after adding in a details of the first three element ,
some of the sluts in the global matrix am still equal to zero. The
reason for this is that none of the three elements links the
associated degrees of. For example, the coefficient in the position
(4,2) and (2,4 )in the (K) matrix zero. Reference to the figure
shows that node (4) is common to elements (1,5 and 6) , whereas
node (2) only occurs in elements (2,3 and 4 ): hence, the( )of
nodes (2) and (4) are not linked. Similarly, in the force vector, the
coefficient in the position (3) is zero, since node (3) is not
involved in the system.
3-10 Incorporation of the Bounders Conditions
There are several ways in which the boundary conditions can
be incorporated into the system equation one method is to
rearrange the equation, for example
[
] {
{
{ } = {
{
{ } ……….(1-107)
Where { is the vector of unknown degrees of freedom
while those in the vector { are all specified ( known ). Fours
and { will contain the unknown reactions .Equation (1.107)
can be rewritten as two equations;
{ + { ={ …………..(1-108)
{ + { ={ …………..(1-109)

21
(1-108) can be written
{ ={ - { ={ ……..(1-110)
Since { is known, the terms on the RHS can be reduced to
a vector { , and the resulting equation can then be solved for
the unknown variable { , and equ. (1-109) may be solved for
{ . This method is straight forward, but it requires the equation
to be renumbered. Another method may be used which does not
need reordering the equation. To understand this method,
consider equ. (1-109). This can be written using (1-110) as:
[
] {
{
{ } = {
{ {
{ } ={
{
{ }
……………………(1-111)
If the equation In the 2nd line of the above matrix are stored
in a temporary matrix for later us, then equ. (1-111) can be
written as;
[
] {{
{ } = {
{
{
}…………(1-112)
Where is the with all the of diagonal terms site
equal to zero, and { is the correct product of (
{ ). The
second line is of no use (sin u { ={
= { , but it
does allow the matrix and vectors to remain the same size, and
the process can be performed without reordering equation
[
]
{
}
=
{
}

21
the B.cs.r:
Ø2 =20 and Ø4 = 50
Applying the second raw of equ.(1-112), the system equation are;
[
]
{
}
=
{
}
Row the element column coefficients that multiply Ø2 and Ø4
are eliminated by transferring the terms to the RHS. For example,
the first term in the force vector becomes.
300-(-12*20)-(-5*50)=740
The final system will be:
[
]
{
}
=
{
}
Note that the equation are still symmetric and bounded
58*20
48*50

21
Solution Of The Equations
When the boundary condition hare been incorporated into the
system equations , the final step is the solution for the unknown
variables there are many techniques available , and these are
discussed in detail in relevant mathematic and numerical analysis
textbooks. Probably the most common methods for equilibrium
problem that can be used are Gaussian elimination and cholesky
decomposition. However there is one other solution technique
that is widely used, particular in commercial finite element
packages, and that is the" ware front" or "frontal " method.