
Chaotic-Like K-Space Trajectory for Compressed Sensing MRI
7
Copyright © 2015 American Scientific Publishers All rights reserved Printed in the United States of America RESEARCH ARTICLE Journal of Medical Imaging and Health Informatics Vol. 5, 1–7, 2015 Chaotic-Like K -Space Trajectory for Compressed Sensing MRI Ya Li 1 , Ran Yang 2 ∗ , Zhongping Zhang 3 , and Yixiao Wu 4 1 School of Information Science and Technology, Sun Yat-Sen University, Guangzhou 510009, P. R. China 2 School of Mobile Information Engineering, Sun Yat-Sen University, Zhuhai 519082, P. R. China 3 GE Healthcare China, Guangzhou 510627, P. R. China 4 Department of Medical Equipment, The Fifth Affiliated Hospital of Sun Yat-Sen University, Zhuhai 519082, P. R. China Theoretically, the compressed sensing (CS) requires incoherent sampling to satisfy the restricted isometry prop- erty (RIP) condition. However, the purely random sampling scheme is very unpractical in two-dimensional (2D) magnetic resonance imaging (MRI) due to hardware and physiological restraints and also does not follow the sprectum energy distribution of the signal. The existing literature on CS-MRI have been primarily focused on randomly sampling along the conventional trajectories such as cartesian, radial and spiral, however, such sam- pling still shows coherent property which cannot be neglected, in comparison with random k -space sampling. In this paper, a chaotic-like trajectory is proposed based on the chaos attractor which is a good candidate for MRI k -space sampling with noise-like under-sampling artifacts since chaotic systems can not only produce random sequences, but also are deterministic systems inherently which are easy to implement. Finally, a chaotic-like tra- jectory with under-sampling acceleration ratio R = 5 is designed, and the corresponding simulations are given. Simulation results demonstrate that the proposed trajectory can cause less down-sampling artifacts than the traditional variable density spiral trajectory in CS reconstruction. Keywords: Chaos Trajectory, Compressed Sensing, k -Space Trajectory, MRI, Rapid Imaging, Random Sampling. 1. INTRODUCTION As a revolution in sampling theory, compressed sensing (CS 1,2 ), shows that sparse or compressible signals can be sampled at a rate significantly lower than the rate prescribed by Shannon- Nyquist theory. CS has attracted huge attention from the field of biomedical imaging, 3 because of its compressive sampling mechanism–which can speed up the sampling process. Magnetic Resonance Imaging (MRI) is one of the earliest applications of CS which is referred to as CS-MRI, 4 for the MRI scanner, under physical and physiological constraints, has strong requirement to reduce the scan time. As CS-MRI shows huge potential benefits in reducing scan time and improving the image quality, 5 it has been a hot research topic in the past few years, e.g., Ref. [6–12]. Although CS theory has been widely applied in the area of MRI, there are some challenging problems due to the physical difficulty of random sampling with practical MRI scans, which fails to meet the incoherence measurement condition of CS the- ory. This difficulty lies in two aspects: Firstly, the physical prin- cipal of MRI currently restricts the data measurement of MRI to the form of Fourier encoding, which, different from the Gaussian ∗ Author to whom correspondence should be addressed. measurement, does not have arbitrary sparsifying transform. 13 Secondly, completely random measurement is difficult to imple- ment in practice because of the physical and instrumental con- straints in the sequential magnetization and relaxation processes for encoding the k-space data. Furthermore, variable-density sampling is usually required to satisfy the nonuniform distribution of k-space energy. Thus sev- eral MRI sampling patterns such as variable density spiral, 14, 15 radial, 16, 17 and Cartesian lines 18 trajectories have been proposed and implemented. However, these sampling patterns cannot meet the above CS requirement well. Therefore, it is of great impor- tance to find a k-space trajectory that can satisfy the requirements of both CS and physical MRI to guarantee successful application of CS in MRI. To utilise the advantage of CS framework in MRI, there have been many attempts made to design random under-sampling pat- terns for CS-MRI. For example, Seeger et al. 11 introduced an optimized k-space trajectory by Bayesian experiment for CS- MRI; Knoll et al. 19 proposed an adaptive variable density random sampling pattern; Menzel et al. 20 demonstrated acceleration fac- tor R ranging from 2 to 8 with different under-sampling schemes for diffusion spectrum imaging (DSI) by CS theory; Chan et al. 16 found out that the radial under-sampling pattern influenced the J. Med. Imaging Health Inf. Vol. 5, No. 2, 2015 2156-7018/2015/5/001/007 doi:10.1166/jmihi.2015.1408 1
Transcript of Chaotic-Like K-Space Trajectory for Compressed Sensing MRI

Copyright © 2015 American Scientific PublishersAll rights reservedPrinted in the United States of America
R E S E A R CH AR T I C L E
Journal of Medical Imaging andHealth Informatics
Vol. 5, 1–7, 2015
Chaotic-Like K -Space Trajectory forCompressed Sensing MRIYa Li1, Ran Yang2�∗, Zhongping Zhang3, and Yixiao Wu4
1School of Information Science and Technology, Sun Yat-Sen University, Guangzhou 510009, P. R. China2School of Mobile Information Engineering, Sun Yat-Sen University, Zhuhai 519082, P. R. China
3GE Healthcare China, Guangzhou 510627, P. R. China4Department of Medical Equipment, The Fifth Affiliated Hospital of Sun Yat-Sen University, Zhuhai 519082, P. R. China
Theoretically, the compressed sensing (CS) requires incoherent sampling to satisfy the restricted isometry prop-erty (RIP) condition. However, the purely random sampling scheme is very unpractical in two-dimensional (2D)magnetic resonance imaging (MRI) due to hardware and physiological restraints and also does not follow thesprectum energy distribution of the signal. The existing literature on CS-MRI have been primarily focused onrandomly sampling along the conventional trajectories such as cartesian, radial and spiral, however, such sam-pling still shows coherent property which cannot be neglected, in comparison with random k-space sampling. Inthis paper, a chaotic-like trajectory is proposed based on the chaos attractor which is a good candidate for MRIk-space sampling with noise-like under-sampling artifacts since chaotic systems can not only produce randomsequences, but also are deterministic systems inherently which are easy to implement. Finally, a chaotic-like tra-jectory with under-sampling acceleration ratio R = 5 is designed, and the corresponding simulations are given.Simulation results demonstrate that the proposed trajectory can cause less down-sampling artifacts than thetraditional variable density spiral trajectory in CS reconstruction.
Keywords: Chaos Trajectory, Compressed Sensing, k-Space Trajectory, MRI, Rapid Imaging, RandomSampling.
1. INTRODUCTIONAs a revolution in sampling theory, compressed sensing (CS1,2),shows that sparse or compressible signals can be sampled ata rate significantly lower than the rate prescribed by Shannon-Nyquist theory. CS has attracted huge attention from the fieldof biomedical imaging,3 because of its compressive samplingmechanism–which can speed up the sampling process. MagneticResonance Imaging (MRI) is one of the earliest applications ofCS which is referred to as CS-MRI,4 for the MRI scanner, underphysical and physiological constraints, has strong requirement toreduce the scan time. As CS-MRI shows huge potential benefitsin reducing scan time and improving the image quality,5 it hasbeen a hot research topic in the past few years, e.g., Ref. [6–12].
Although CS theory has been widely applied in the area ofMRI, there are some challenging problems due to the physicaldifficulty of random sampling with practical MRI scans, whichfails to meet the incoherence measurement condition of CS the-ory. This difficulty lies in two aspects: Firstly, the physical prin-cipal of MRI currently restricts the data measurement of MRI tothe form of Fourier encoding, which, different from the Gaussian
∗Author to whom correspondence should be addressed.
measurement, does not have arbitrary sparsifying transform.13
Secondly, completely random measurement is difficult to imple-ment in practice because of the physical and instrumental con-straints in the sequential magnetization and relaxation processesfor encoding the k-space data.Furthermore, variable-density sampling is usually required to
satisfy the nonuniform distribution of k-space energy. Thus sev-eral MRI sampling patterns such as variable density spiral,14,15
radial,16,17 and Cartesian lines18 trajectories have been proposedand implemented. However, these sampling patterns cannot meetthe above CS requirement well. Therefore, it is of great impor-tance to find a k-space trajectory that can satisfy the requirementsof both CS and physical MRI to guarantee successful applicationof CS in MRI.To utilise the advantage of CS framework in MRI, there have
been many attempts made to design random under-sampling pat-terns for CS-MRI. For example, Seeger et al.11 introduced anoptimized k-space trajectory by Bayesian experiment for CS-MRI; Knoll et al.19 proposed an adaptive variable density randomsampling pattern; Menzel et al.20 demonstrated acceleration fac-tor R ranging from 2 to 8 with different under-sampling schemesfor diffusion spectrum imaging (DSI) by CS theory; Chan et al.16
found out that the radial under-sampling pattern influenced the
J. Med. Imaging Health Inf. Vol. 5, No. 2, 2015 2156-7018/2015/5/001/007 doi:10.1166/jmihi.2015.1408 1

R ES E A R CH AR T I C L E J. Med. Imaging Health Inf. 5, 1–7, 2015
(a) The x-y plane of Rossler attractor
(b)The x-y plane of lorenz attractor
(c) The x-y plane of chua attractor
Fig. 1. The x−y plane of Rossler attractor.
quality of image reconstruction but the Golden-angle samplingprovided good experiment results for breast MRI under CSframework. Ajraoui et al.18 showed an example by using a prioriknowledge in the design of sampling pattern for faster acquisitionof hyperpolarized gas images.
It should be noticed that as deterministic systems, Chaos canshow apparently random or unpredictable behavior. This prop-erty seems to meet the random measurement requirement of CS.In light of this, Tan et al. applied chaotic logistic map to CS-MRI21–24 in recent years. These works were focused on how todesign the measurement matrix to satisfy the incoherent samplingrequirement of CS-MRI. However, the fact that the scan time ofMRI not only depends on the number of sampling points but alsoon the arch-length and curvature of k-space trajectory, has beenneglected. Furthermore, the chaotic logistic map trajectories havethe same difficulties with the random measurement to implementin physics, as these trajectories are not smooth.
The above problem and the existing research results moti-vate the investigation of this question: Can we find a trajectorywith smooth, random-like and variable density sampling for CS-MRI? To this end, in this paper, after comparing several differentChaos systems, we propose a chaotic-like k-space trajectoryfor CS-MRI. which has the following advantages: smooth-ness, randomness-like and variable density sampling. Simulationresults also demonstrate that the proposed trajectory can leadto noise-like down-sampling artifacts which are not difficult toremove by CS algorithms.
2. METHOD AND IMPLEMENTATIONThe objective of this paper is to design a practical random-likesampling pattern for CS-MRI that would be approximately sim-ilar to the 2D random sampling scheme. As we know that thepurely random under-sampling scheme is expensive and impracti-cal in hardware design for 2D MRI due to its physical constraints.
Here we propose a chaotic-like trajectory. Chaos is a nonlinearsystem, which can generate random-like output, moreover, is adeterministic system with simple physical implementation. Thisdeterministic system has periodic long-term behavior, which isvery sensitive to initial conditions. Therefore, it has been success-fully applied in security communication because this random-likebehavior can be reproduced exactly which is superior to ran-dom noises. A lot of chaos systems have been reported sinceLorenz firstly discovered the chaos in,25 such as Chua’s circuit,26
Rossler system,27 whose x− y plane portraits are demonstratedin Figure 1, respectively.
Due to the non-uniform distribution of energy in k-space, thescanning trajectory is desired to be of variable sampling. Andmore sampling points in the k-space center area are needed thanin the periphery of k-space. Comparing the shapes of different
Table I. Procedure of the k-space trajectory design based on theRossler system.
Step1: Generate the chaotic trajectory. Here, we choose the Rosslerattractor, then solve the ODE functions (1).
Step2: Cut off a curve C from the x−y plane of the chaotic trajectorybased on the k-space coverage such that C�0�= 0 and�C�end�� � 1/�2∗FOV�.
Step3: Given the maximum gradient amplitude Gmax and the maximum slewrate Smax, compute the time-optimal gradient waveforms of the curve C
by tOptGrad V0.2 tool box.Step4: Determine the number of multi shots based on the accelerate
ratio R.Step5: Rotate the trajectory around the origin points of the k-space, which
can be implemented by multiplying a factor ei��, where �� denotes therotation angle.
2

R E S E A R CH A R T I C L EJ. Med. Imaging Health Inf. 5, 1–7, 2015
(a) Chaotic-like trajectory (b) Variable density spiral trajectory
(c) Gradient waveforms of chaotic-like trajectory (d) Gradient waveforms of variabled ensity spiral trajectory
0 1 2 3 4 5 6 7 8 9 10−1.5
−1
−0.5
0
0.5
1
1.5gxgy
0 0.5 1 1.5 2 2.5 3 3.5 4−4
−3
−2
−1
0
1
2
3
4
gygx
Fig. 2. The k-space trajectories and the corresponding gradient waveforms when 20% (R = 5) k-space data are sampled.
chaos systems, it can be easily found that the Rossler system ismore suitable for MRI scanning. Here, we choose the Rosslersystem, which is depicted by the following third order differentialequation ⎧⎪⎨
⎪⎩
·x =−y−z·y = x+ay·z= b+z�x−c�
(1)
Here, �x�t�� y�t�� z�t�� ∈ �3 denots the phase space and�a�b� c� ∈ �3 are system parameters. There are two fixed equi-libria points F± located at
�x+� y+� z+�
=(c+√
b2−4ac
2�−c+√
b2−4ac
2a�c+√
b2−4ac
2a
)(2)
and
�x−� y−� z−�
=(c−√
b2−4ac
2�−c−√
b2−4ac
2a�c−√
b2−4ac
2a
)(3)
A fixed point F− is located in the middle of the attractor andis a saddle-focus with an unstable spiral mainly in the x− y
plane illustrated in Figure 1. F+ is located outside of the regionof the attractor. The nonlinearity z�x− c� becomes active whenthe trajectory leaves the x− y plane. The trajectory thus visitsthe neighborhood of F+ whose 1D unstable manifold sends thetrajectory along the 1D stable manifold of F−, so a new cycle canthen occur.28 With appropriate parameter values, the trajectorythus describes a chaotic attractor, in this paper, we choose a =0�15� b = 2� c = 10.The chaotic trajectory illustrated in Figure 1(a) is similar to the
variable density spiral trajectory. However, the interval betweensample points along the trajectory in radial direction is variedirregularly, which is different from the variable density spiral.However, the overall readout length of this trajectory would beunacceptably long as the chaos is long-term periodic. In order tophysically implement this trajectory, the enter trajectory shouldbe acquired in multi shots. Here, we cut off a section of thechaotic trajectory based on the requirement of scan coveragewhich is determined by the field of view (FOV) of k-space, androtate the trajectory around the origin of k-space. How to choosethe sampling points along the trajectory under the MRI physical
3
R ES E A R CH AR T I C L E J. Med. Imaging Health Inf. 5, 1–7, 2015
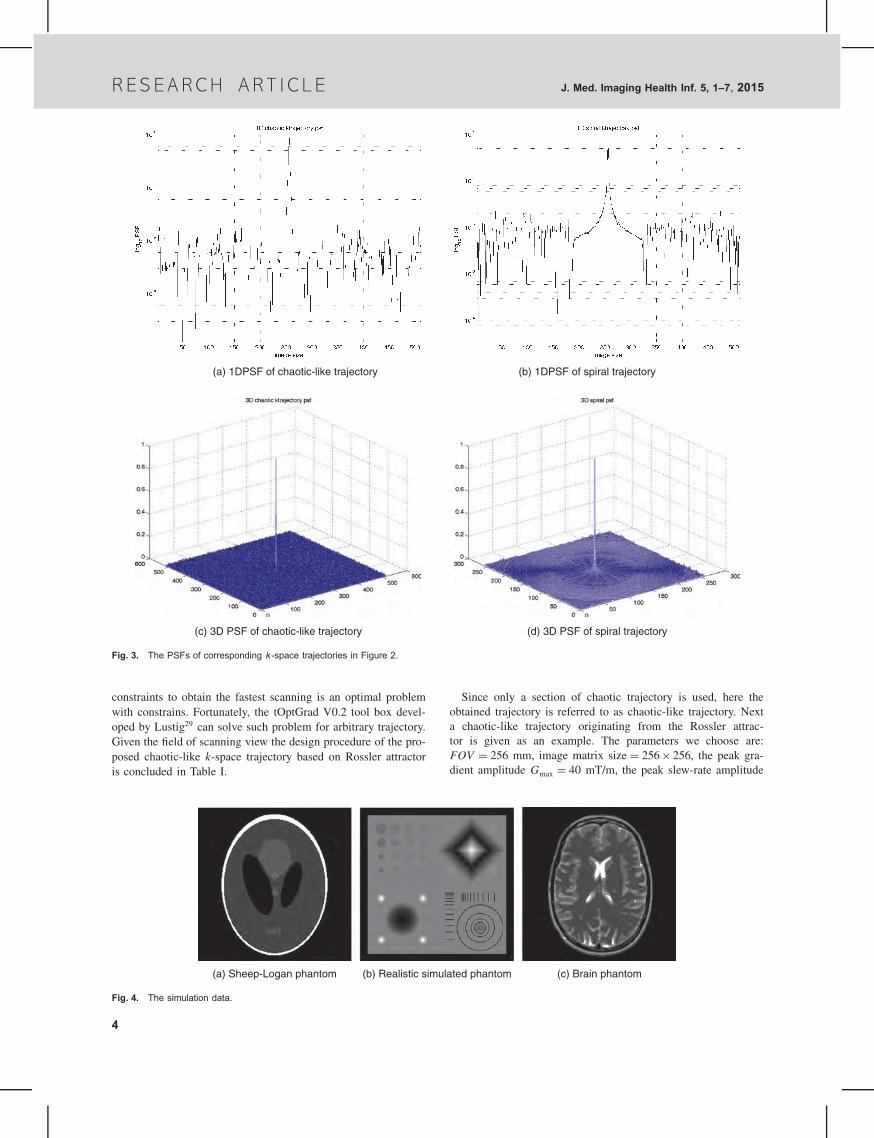
(a) 1DPSF of chaotic-like trajectory (b) 1DPSF of spiral trajectory
(c) 3D PSF of chaotic-like trajectory (d) 3D PSF of spiral trajectory
Fig. 3. The PSFs of corresponding k-space trajectories in Figure 2.
constraints to obtain the fastest scanning is an optimal problemwith constrains. Fortunately, the tOptGrad V0.2 tool box devel-oped by Lustig29 can solve such problem for arbitrary trajectory.Given the field of scanning view the design procedure of the pro-posed chaotic-like k-space trajectory based on Rossler attractoris concluded in Table I.
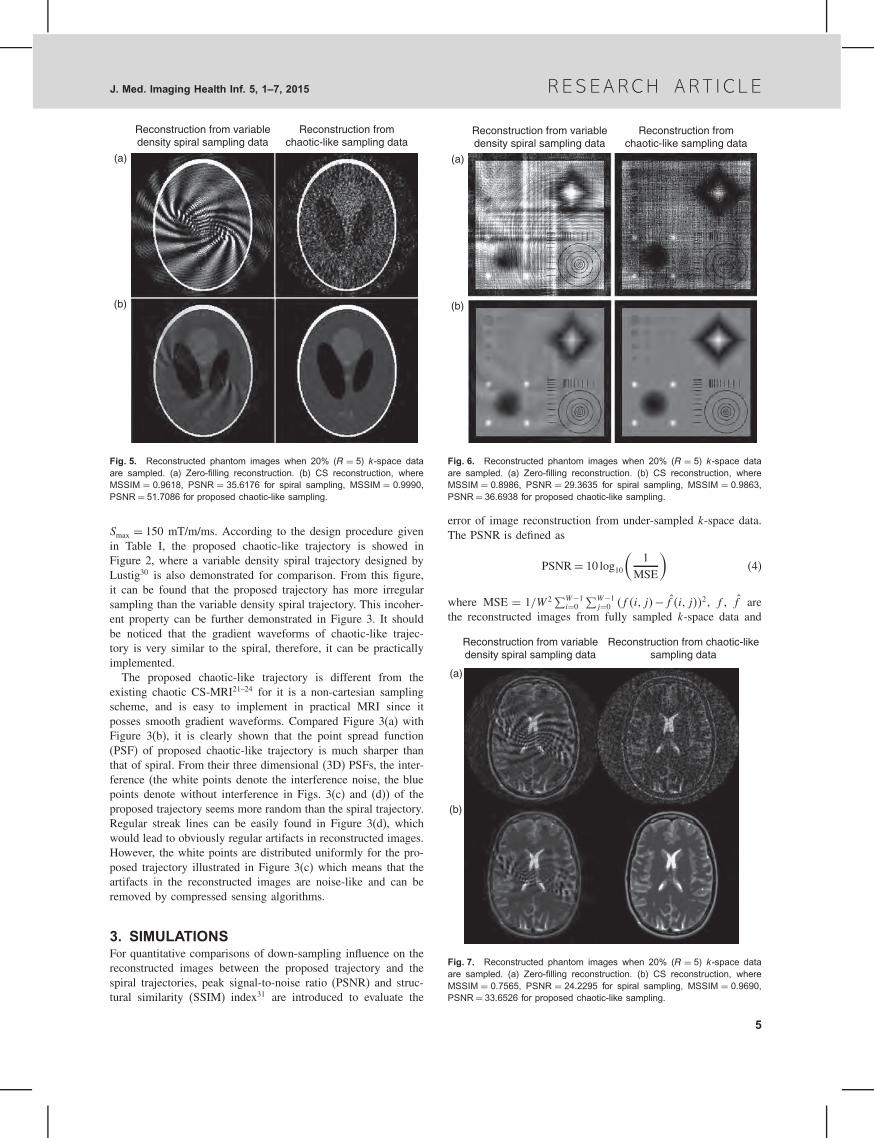
(a) Sheep-Logan phantom (b) Realistic simulated phantom (c) Brain phantom
Fig. 4. The simulation data.
Since only a section of chaotic trajectory is used, here theobtained trajectory is referred to as chaotic-like trajectory. Nexta chaotic-like trajectory originating from the Rossler attrac-tor is given as an example. The parameters we choose are:FOV = 256 mm, image matrix size = 256× 256, the peak gra-dient amplitude Gmax = 40 mT/m, the peak slew-rate amplitude
4
R E S E A R CH A R T I C L EJ. Med. Imaging Health Inf. 5, 1–7, 2015
Reconstruction from variabledensity spiral sampling data
(a)
(b)
Reconstruction fromchaotic-like sampling data
Fig. 5. Reconstructed phantom images when 20% (R = 5) k-space dataare sampled. (a) Zero-filling reconstruction. (b) CS reconstruction, whereMSSIM = 0�9618, PSNR = 35�6176 for spiral sampling, MSSIM = 0�9990,PSNR= 51�7086 for proposed chaotic-like sampling.
Smax = 150 mT/m/ms. According to the design procedure givenin Table I, the proposed chaotic-like trajectory is showed inFigure 2, where a variable density spiral trajectory designed byLustig30 is also demonstrated for comparison. From this figure,it can be found that the proposed trajectory has more irregularsampling than the variable density spiral trajectory. This incoher-ent property can be further demonstrated in Figure 3. It shouldbe noticed that the gradient waveforms of chaotic-like trajec-tory is very similar to the spiral, therefore, it can be practicallyimplemented.
The proposed chaotic-like trajectory is different from theexisting chaotic CS-MRI21–24 for it is a non-cartesian samplingscheme, and is easy to implement in practical MRI since itposses smooth gradient waveforms. Compared Figure 3(a) withFigure 3(b), it is clearly shown that the point spread function(PSF) of proposed chaotic-like trajectory is much sharper thanthat of spiral. From their three dimensional (3D) PSFs, the inter-ference (the white points denote the interference noise, the bluepoints denote without interference in Figs. 3(c) and (d)) of theproposed trajectory seems more random than the spiral trajectory.Regular streak lines can be easily found in Figure 3(d), whichwould lead to obviously regular artifacts in reconstructed images.However, the white points are distributed uniformly for the pro-posed trajectory illustrated in Figure 3(c) which means that theartifacts in the reconstructed images are noise-like and can beremoved by compressed sensing algorithms.
3. SIMULATIONSFor quantitative comparisons of down-sampling influence on thereconstructed images between the proposed trajectory and thespiral trajectories, peak signal-to-noise ratio (PSNR) and struc-tural similarity (SSIM) index31 are introduced to evaluate the
Reconstruction from variabledensity spiral sampling data
(a)
(b)
Reconstruction fromchaotic-like sampling data
Fig. 6. Reconstructed phantom images when 20% (R = 5) k-space dataare sampled. (a) Zero-filling reconstruction. (b) CS reconstruction, whereMSSIM = 0�8986, PSNR = 29�3635 for spiral sampling, MSSIM = 0�9863,PSNR= 36�6938 for proposed chaotic-like sampling.
error of image reconstruction from under-sampled k-space data.The PSNR is defined as
PSNR= 10 log10
(1
MSE
)(4)
where MSE = 1/W 2∑W−1i=0
∑W−1j=0 �f �i� j�− f̂ �i� j��2, f , f̂ are
the reconstructed images from fully sampled k-space data and
Reconstruction from variabledensity spiral sampling data
Reconstruction from chaotic-likesampling data
(a)
(b)
Fig. 7. Reconstructed phantom images when 20% (R = 5) k-space dataare sampled. (a) Zero-filling reconstruction. (b) CS reconstruction, whereMSSIM = 0�7565, PSNR = 24�2295 for spiral sampling, MSSIM = 0�9690,PSNR= 33�6526 for proposed chaotic-like sampling.
5

R ES E A R CH AR T I C L E J. Med. Imaging Health Inf. 5, 1–7, 2015
(a)
(b)
Fig. 8. Reconstructed phantom images when 10% (R = 10) k-space data are sampled. (a) By variable density spiral sampling data. (b) By chaotic-likesampling data.
under-sampled data, respectively, and W denotes the size of theimages.
SSIM which compares brightness, contrast and structurebetween two images, is suitable for medical image analysis,32
because its quality assessment corresponds to human evalua-tion of MR images, unlike PSNR which does not take intoaccount the type of damage the reconstruction suffers from. It isnoted that the higher values of above two indexes imply that thereconstructed image is more consistent with the reference imageobtained from fully sampled k-space data.
Data used in simulations include the well-known Shepp-Loganphantom, a more realistic simulated phantom with non-piecewiseconstant image features33 and an analytical brain phantom,34
shown in Figures 4(a)–(c), respectively. The three phantoms arewith the same size of 256×256 and the same FOV of 256 mm.
As most MR images are sparse or compressible in certaintransform domains, they can be reconstructed by CS algorithms.Generally, the image reconstruction problem can be described asa constrained convex minimization problem
argminf
�� � Fuf −p �22 +�T V �f �+� �f �1 (5)
where f is the vectorized image to be reconstructed, denotesthe linear operator that transforms the image representationto a sparse representation, such as wavelet, DCT, etc., T V �·�expresses total variation, Fu is the down-sampled Fourier trans-form, p is the measured data in the k-space, �, � and � are con-stant regularization parameters. For solving (5), the SplitBregmanAlgorithm (SB)35 is used in this paper.
In order to show the difference between the proposed trajec-tory and the existing variable density spiral trajectory clearly, the
reconstructed images from the proposed trajectory and spiral tra-jectory at the accelerate ratio R= 5 and R= 10 are demonstratedin Figures 5∼8, and the reconstructed images by zero fillingand SB algorithms are illustrated, respectively. Comparing thethree zero-filing reconstructed images of Figures 5∼7, it can beseen that the proposed trajectory causes noise-like artifacts ratherthan regular artifacts generated from spiral trajectory. The recon-structed errors in Figures 5∼7 are measured, and the MSSIM andthe PSNR indexes show that the reconstructed image obtainedfrom proposed chaotic-like sampling is of higher quality thanthat from variable density spiral sampling, especially for brainphantom in Figure 7. The reason is that the CS-MRI is good atdealing with noise-like artifacts. It can be seen that the artifactscaused by the proposed sampling are suppressed successfully,however, for spiral trajectory, the irregular artifacts can not beremoved effectively. To support this argument, Figure 8 presentsthe reconstructed results at acceleration rate R = 10. It demon-strates that the quality of reconstructed images from chaotic-liketrajectory sampling data are much better than that from the spiraltrajectory, obviously.
4. DISCUSSIONSThe results presented in this paper demonstrate the advantagesof the proposed k-space trajectories for CS-MRI. Compared withthe widely-used traditional trajectories such as rectilinear, radialand spiral, the proposed trajectory is more suitable for CS-MRI,due to the inherent characteristics of noise-like artifacts causedby under-sampling. Simulations show that the proposed trajectoryhas higher PSNR and MSSIM than spiral trajectory. The goodfidelity is attributed to the incoherent sampling scheme. Figure 2
6

R E S E A R CH A R T I C L EJ. Med. Imaging Health Inf. 5, 1–7, 2015
shows that the locations of sampling points of proposed trajectoryare more irregular than spiral trajectory.
5. CONCLUSIONSA chaotic-like trajectory is proposed in this paper, which leadsto smooth, random-like, variable density sampling. Thus it ismore suitable for CS-MRI as it can meet the incoherent samplingrequirement of CS. Simulation results demonstrate that the pro-posed chaotic-like k-space trajectory can be a desirable candidatefor CS-MRI.
References and Notes1. E. J. Cands, J. Romberg, and T. Tao, Robust uncertainty principles: Exact sig-
nal reconstruction from highly incomplete frequency information. InformationTheory, IEEE Transactions on 52, 489 (2006).
2. D. L. Donoho, Compressed sensing. Information Theory, IEEE Transactionson 52, 1289 (2006).
3. W. Ge, Y. Bresler, and V. Ntziachristos, Guest editorial compressive sens-ing for biomedical imaging. Medical Imaging, IEEE Transactions on 30, 1013(2011).
4. M. Lustig, D. Donoho, and J. M. Pauly, Sparse mri: The application of com-pressed sensing for rapid mr imaging. Magnetic Resonance in Medicine58, 1182 (2007).
5. M. Lustig, D. L. Donoho, J. M. Santos, and J. M. Pauly, Compressed sensingmri. Signal Processing Magazine, IEEE 25, 72 (2008).
6. M. Rostami, O. Michailovich, and Z. Wang, Image deblurring using derivativecompressed sensing for optical imaging application. Image Processing, IEEETransactions on 21, 3139 (2012).
7. K. Khare, C. J. Hardy, K. F. King, P. A. Turski, and L. Marinelli, Acceleratedmr imaging using compressive sensing with no free parameters. MagneticResonance in Medicine 68, 1450 (2012).
8. K. Kazimierczuk and V. Y. Orekhov, Accelerated nmr spectroscopy by usingcompressed sensing. Angew. Chem. Int. Ed. 50, 5556 (2011).
9. J. P. Haldar, D. Hernando, and L. Zhi-Pei, Compressed-sensing mri with ran-dom encoding. Medical Imaging, IEEE Transactions on 30, 893 (2011).
10. D. J. Holland, D. M. Malioutov, A. Blake, A. J. Sederman, and L. F.Gladden, Reducing data acquisition times in phase-encoded velocity imag-ing using compressed sensing. Journal of Magnetic Resonance 203, 236(2010).
11. M. Seeger, H. Nickisch, R. Pohmann, and B. Sch, O. Lkopf, Optimizationof k-space trajectories for compressed sensing by bayesian experimentaldesign. Magnetic resonance in Medicine 63, 116 (2010).
12. U. Gamper, P. Boesiger, and S. Kozerke, Compressed sensing in dynamicmri. Magnetic resonance in medicine 59, 365 (2008).
13. E. J. Cand¨¨s and T. Tao, Near-optimal signal recovery from random projec-tions: Universal encoding strategies. Information Theory, IEEE Transactionson 52, 5406 (2006).
14. J. C. Ye, S. Tak, Y. Han, and H. W. Park, Projection reconstruction mr imagingusing focuss. Magnetic Resonance in Medicine 57, 764 (2007).
15. J. M. Santos, C. H. Cunningham, M. Lustig, B. A. Hargreaves, B. S. Hu, D. G.Nishimura, and J. M. Pauly, Single breath-hold whole-heart mra using variable-density spirals at 3t. Magnetic Resonance in Medicine 55, 371 (2006).
16. R. W. Chan, E. A. Ramsay, E. Y. Cheung, and D. B. Plewes, The influenceof radial undersampling schemes on compressed sensing reconstruction inbreast mri. Magnetic Resonance in Medicine. 67, 363 (2012).
17. L. B. Montefusco, D. Lazzaro, S. Papi, and C. Guerrini, A fast compressedsensing approach to 3d mr image reconstruction. Medical Imaging, IEEETransactions on, 30, 1064 (2011).
18. S. Ajraoui, J. Parra-Robles, and J. M. Wild, Incorporation of prior knowledgein compressed sensing for faster acquisition of hyperpolarized gas images.Magnetic Resonance in Medicine 360 (2012).
19. F. Knoll, C. Clason, C. Diwoky, and R. Stollberger, Adapted random samplingpatterns for accelerated mri. MAGMA 24, 43 (2011).
20. M. I. Menzel, E. T. Tan, K. Khare, J. I. Sperl, K. F. King, X. Tao, C. J. Hardy, andL. Marinelli, Accelerated diffusion spectrum imaging in the human brain usingcompressed sensing. Magnetic Resonance in Medicine 66, 1226 (2011).
21. T. D. Tan, D. Van Phong, T. M. Chinh, and N. Linh-Trung, Accelerated parallelmagnetic resonance imaging with multi-channel chaotic compressed sensing,Advanced Technologies for Communications (ATC), 2010 International Con-ference on IEEE (2010), pp. 146–151.
22. T. D. Tan, L. Vu-Ha, and N. L. Trung, Spread spectrum for chaotic com-pressed sensing techniques in parallel magnetic resonance imaging, Informa-tion, Communications and Signal Processing (ICICS) 2011 8th InternationalConference on IEEE (2011), pp. 1–5.
23. D. Van Phong, N. Linh-Trung, T. D. Tan, H. V. Le, and M. N. Do, Fast imageacquisition in magnetic resonance imaging by chaotic compressed sensing,Biomedical Imaging: From Nano to Macro, 2011 IEEE International Sympo-sium on IEEE (2011), pp. 85–88.
24. N. Linh-Trung, T. Minh-Chinh, T. Tran-Duc, H. V. Le, and M. N. Do, Chaoticcompressed sensing and its application to magnetic resonance imaging. RevJournal on Electronics and Communications 3, 84 (2013).
25. E. N. Lorenz, Deterministic nonperiodic flow. Journal of the Atmospheric Sci-ences 20, 130 (1963).
26. L. Jackson, A. Lindgren, Y. Kim et al. A chaotic attractor from chuas circuit.IEEE Transactions on Circuits and Systems 31 (1984).
27. O. E. Rössler, An equation for continuous chaos. Phys. Lett. A 57, 397 (1976).28. C. Letellier and O. E. Rossler, Rossler attractor. 1, 1721 (2006).29. M. Lustig, K. Seung-Jean, and J. M. Pauly, A fast method for designing time-
optimal gradient waveforms for arbitrary k-space trajectories. Medical Imag-ing, IEEE Transactions on 27, 866 (2008).
30. M. Lustig, Sparse mri v0. 2. Website (2008), http://www.stanford.edu/mlustig/SparseMRI.html.
31. Z. Wang and A. C. Bovik, Mean squared error: Love it or leave it? a new lookat signal fidelity measures. Signal Processing Magazine, IEEE 26, 98 (2009).
32. J. Miao, D. Huo, and D. L. Wilson, Quantitative image quality evaluation of mrimages using perceptual difference models. Medical Physics 35, 2541 (2008).
33. D. Smith and E. Welch, Non-sparse phantom for compressed sensing mrireconstruction. International Society for Magnetic Resonance in Medicine 19thScientific Meeting-ISMRM (2011), Vol. 11, pp. 2845.
34. M. Guerquin-Kern, L. Lejeune, K. P. Pruessmann, and M. Unser, Realisticanalytical phantoms for parallel magnetic resonance imaging. Medical Imag-ing, IEEE Transactions on 31, 626 (2012).
35. T. Goldstein and S. Osher, The split bregman method for l1-regularized prob-lems. SIAM Journal on Imaging Sciences 2, 323 (2009).
Received: 31 July 2014. Revised/Accepted: 18 November 2014.
7




















