Cap´ıtulo 4 Solución de Sistemas de Ecuaciones Lineales
33
Cap´ ıtulo 4 Soluci´ on de Sistemas de Ecuaciones Lineales 4.1. Introducci´ on Los sistemas de ecuaciones lineales surgen naturalmente en muchas aplicaciones cient´ ıficas y de ingenier´ ıa, por eso es la importancia de saber resolverlos. Para resolver sistemas de ecuaciones lineales se pueden emplear varios m´ etodos num´ ericos, pero siempre se desea que sean eficientes y precisos. Todo sistema de ecuaciones lineales de la forma : a 11 x 1 + a 12 x 2 + a 13 x 3 + ... a 1n x n = b 1 a 21 x 1 + a 22 x 2 + a 23 x 3 + ... a 2n x n = b 2 ... ... ... ... ... ... ... ... ... a n1 x 1 + a n2 x 2 + a n3 x 3 + ... a nn x n = b n Puede expresarse matricialmente en la forma expandida como: a 11 a 12 a 13 ... a 1n a 21 a 22 a 23 ... a 2n ... ... ... ... ... a n1 a n2 a n3 ... a nn · x 11 x 12 ... x 1n = b 1 b 2 ... b n o bien el sistema puede expresarse en forma matricial compacta como: A · X = B, con A =[a ij ] n×n la matriz de los coeficientes, X =[x i ] n×1 la matriz de las inc´ognitas y B =[b i ] n×1 la matriz de los t´ erminos independientes. Si A es una matriz inversible, entonces al sistema de ecuaciones lineales A · X = B se lo resuelve empleando el M´ etodo de Inversi´on Matricial en la siguiente forma: 65
-
Upload
khangminh22 -
Category
Documents
-
view
7 -
download
0
Transcript of Cap´ıtulo 4 Solución de Sistemas de Ecuaciones Lineales

Capıtulo 4
Solucion de Sistemas de EcuacionesLineales
4.1. Introduccion
Los sistemas de ecuaciones lineales surgen naturalmente en muchas aplicaciones cientıficas yde ingenierıa, por eso es la importancia de saber resolverlos.
Para resolver sistemas de ecuaciones lineales se pueden emplear varios metodos numericos,pero siempre se desea que sean eficientes y precisos.
Todo sistema de ecuaciones lineales de la forma :a11x1 + a12x2 + a13x3 + . . . a1nxn = b1a21x1 + a22x2 + a23x3 + . . . a2nxn = b2. . . . . . . . . . . . . . . . . . . . . . . . . . .
an1x1 + an2x2 + an3x3 + . . . annxn = bn
Puede expresarse matricialmente en la forma expandida como:a11 a12 a13 . . . a1na21 a22 a23 . . . a2n. . . . . . . . . . . . . . .an1 an2 an3 . . . ann
·x11x12. . .x1n
=
b1b2. . .bn
o bien el sistema puede expresarse en forma matricial compacta como: A ·X = B, con
A = [aij]n×n la matriz de los coeficientes,
X = [xi]n×1 la matriz de las incognitas y
B = [bi]n×1 la matriz de los terminos independientes.
Si A es una matriz inversible, entonces al sistema de ecuaciones lineales A · X = B se loresuelve empleando el Metodo de Inversion Matricial en la siguiente forma:
65

A ·X = B
A−1 · A ·X = A−1 ·BX = A−1 ·B
En algunos casos encontrar la matriz A−1 resulta complicado, es por esto que se recurre aotros metodos de solucion.
Si el orden de A es n = 2 o n = 3 el sistema de ecuaciones lineales se puede resolverempleando metodos basicos como igualacion, sustitucion, reduccion y hasta por el metodo deCramer.
Cuando el orden de A es de gran dimension se emplean metodos numericos de solucion, enlos que se puede obtener la solucion exacta o sino una muy buena aproximacion.
Antes de estudiar los metodos de resolucion de Sistemas de Ecuaciones Lineales (S.E.L), resultaconveniente introducir el concepto de condicionamiento de un S.E.L, esto es, la sensibilidad de lasolucion exacta del sistema a las pequenas variaciones en los valores que lo conforman.
4.2. Condicionamiento de un S.E.L.
Ejemplo 4.2.1 Sea el S.E.L. de la forma A ·X = B, con A inversible.10 7 8 77 5 6 58 6 10 97 5 9 10
·x1x2x3x4
=
32233331
con solucion X =
x1x2x3x4
=
1111
Si se perturba ligeramente la matriz B, tambien se perturba la matriz X:
10 7 8 77 5 6 58 6 10 97 5 9 10
·x1x2x3x4
=
32.122.933.130.9
, luego su solucion es X =
x1x2x3x4
=
9.2
−12.64.5−1.1
Si se perturba ligeramente la matriz A, tambien se perturba la matriz X:
10 7 8.1 7.27.08 5.04 6 5
8 5.98 9.89 96.99 4.99 9 9.98
·x1x2x3x4
=
32233331
, su solucion es X =
x1x2x3x4
=
−81137−34
22
Lo visto anteriormente indica que el sistema esta mal condicionado. El mal condicionamientoes debido a que cond(A) = ‖A‖∞ · ‖A−1‖∞ = 2984 es grande.
66

Definicion 4.2.1 Se dice que el S.E.L AX = B con A ∈Mnxn inversible, esta mal condicio-nado , si ante pequenas variaciones de A o de B, la solucion X varıa mucho.
Para determinar si un sistema es mal condicionado se puede medir la variacion de la solucioncon respecto a las variaciones de A o de B mediante el numero de condicion de A
Definicion 4.2.2 Sea S.E.L AX = B con A ∈Mnxn inversible, el numero de condicion deA es:
cond∗(A) = ‖A‖∗ · ‖A−1‖∗para una norma matricial ‖ · ‖∗
Normas Matriciales
Las normas matriciales que usualmente se aplican son:
‖A‖1 = max1≤j≤n
n∑i=1
|aij| , ‖A‖∞ = max1≤i≤n
n∑j=1
|aij|
Todas las normas matriciales verifican:
Propiedades de toda norma:
1. ‖A‖∗ ≥ 0
2. ‖A‖∗ = 0 si y solo si A = Θ
3. ‖A+B‖∗ ≤ ‖A‖∗ + ‖B‖∗
4. ‖kA‖∗ = |k| · ‖A‖∗
Otras Propiedades:
1. ‖A‖∗ ≥ ρ(A)
2. ‖A·B‖∗ ≤ ‖A‖∗ ·‖B‖∗
3. ‖A−1‖∗ ≥ ‖A‖−1∗
4. ‖I‖∗ = 1
Como consecuencia de las propiedades y de la definicion del numero de condicion se verifica:
Propiedades del numero de condicion:
1. cond(A) ≥ 1, para toda A ∈Mnxn
2. cond(A) = cond(A−1), para toda A ∈Mnxn
3. cond(kA) = cond(A), para toda A ∈Mnxn, para todo k 6= 0
Tambien se cumplen los siguientes resultados:
Teorema 4.2.1 Se consideran, para A invertible y B 6= Θ los sistemas:
AX = B
A(X + δX) = B + δB
entonces‖δX‖‖X‖
≤ cond(A)‖δB‖‖B‖
67

Teorema 4.2.2 Se consideran, para A invertible y B 6= Θ los sistemas:
AX = B
(A+ δA)(X + δX) = B
entonces‖δX‖
‖X + δX‖≤ cond(A)
‖δA‖‖A‖
Observacion 4.2.1 De lo anterior, cuanto mayor sea el numero de condicion peor sera el con-dicionamiento del sistema, ya que se esta comparando el error relativo en la solucion X, conrespecto al error relativo ya sea en A o en B.
Para resolver los sistemas mal condicionados se usan tecnicas de precondicionamiento:
Dado un sistema AX = B mal condicionado (es decir, con cond(A) grande), se busca unamatriz inversible P tal que cond(PA) sea pequeno. Entonces, se resuelve el sistema equivalentebien condicionado PAX = PB.
El caso mas favorable serıa P = A−1; pues entonces cond(PA) = cond(I) = 1.
Las tecnicas de precondicionamiento buscan una matriz P “proxima” a A−1; pero facilmentecalculable.
Por suerte la gran mayorıa de los sistemas que se presentan en los problemas de ingenierıaestan bien condicionados.
4.3. Metodos para hallar la solucion de un S.E.L
Existen varios tipos de metodos para hallar la solucion de S.E.L., en esta asignatura se estu-diaran algunos de ellos:
I Metodos Directos
a) Metodo de Matriz de Coeficientes Diagonal.
b) Metodo de Matriz de Coeficientes Triangular.
II Metodos de Eliminacion
a) Metodo de Eliminacion Simple de Gauss.
b) Metodo de Gauss-Jordan.
68

III Metodos de Descomposicion
a) Metodo LU.
b) Metodo de Cholesky.
IV Metodos Iterativos
a) Metodo de Gauss-Seidel.
b) Metodo de Gauss-Jacobi.
4.4. Metodos Directos
Existen casos en los que por la conformacion de la matriz de coeficientes se aplican los MetodosDirectos o Metodos de Solucion Inmediata
4.4.1. Metodo de Matriz de Coeficientes Diagonal
Sea A ·X = B un sistema de ecuaciones lineales con solucion unica (de(A) 6= 0) en el que lamatriz de coeficientes Anxn es diagonal. Entonces los elementos de la solucion se pueden calcu-lar inmediatamente despejando cada incognita de cada ecuacion, es decir, se despeja la primeraincognita de la primera ecuacion, la segunda incognita se despeja de la segunda ecuacion; y asısucesivamente hasta calcular el valor de la ultima incognita que se despeja de la ultima ecuacion.
Esto es, dado el S.E.L.a11x1 = b1
a22x2 = b2. . . . . . . . . . . . . . . . . . . . . . . . . . .
annxn = bn
De la primera ecuacion, se obtiene x1 =b1a11
De la segunda ecuacion, se obtiene x2 =b2a22
Ası siguiendo, en forma general se obtiene :
xi =biaii, i = 1, 2, · · · , n
Ejemplo 4.4.1 Sea el S.E.L.3x1 = −5
3x2 = 04x3 = −3
2x4 = 6
69

Entonces despejando de cada una de las ecuaciones se obtiene la solucion:
x1 = −5
3,
x2 =0
3= 0,
x3 = −3
4,
x4 =6
2= 3
Ası, el conjunto solucion del sistema es:
CS = {X} =
x1x2x3x4
=
−5
3
0
−3
4
3
4.4.2. Metodos de Matriz de Coeficientes Triangular
Metodo de Matriz de Coeficientes Triangular Superior
Sea A ·X = B un sistema de ecuaciones lineales con solucion unica (de(A) 6= 0) en el que lamatriz de coeficientes Anxn es triangular superior. Entonces los elementos de la solucion se puedencalcular mediante el metodo de sustitucion regresiva, es decir, se despeja la ultima incognita dela ultima ecuacion, se sustituye en la penultima ecuacion; despues se despeja de esta ecuacionla penultima incognita y se repite el proceso hacia arriba hasta calcular el valor de la primeraincognita.
Esto es, dado el S.E.L.a11x1 + a12x2 + a13x3 + . . . a1nxn = b1
+ a22x2 + a23x3 + . . . a2nxn = b2. . . . . . . . . . . . . . . . . . . . . . . . . . .
annxn = bn
De la ultima ecuacion, se obtiene xn =bnann
Reemplazando en la penultima ecuacion, se obtiene xn−1, siguiendo ası, por sustitucion regre-siva, se tiene en forma general:
xi =1
aii·
(bi −
n∑j=i+1
aijxj
), i = n, n− 1, · · · , 1
Ejemplo 4.4.2 Sea el S.E.L.3x1 + 2x2 − 2x3 + 4x4 = −5
3x2 − 5x3 + 3x4 = 04x3 + 3x4 = −3
2x4 = 6
70

Aplicando sustitucion regresiva se obtiene:
x4 =6
2= 3,
x3 =−3− 3x4
4= −12
4= −3,
x2 =5x3 − 3x4
3= −24
3= −8,
x1 =−5− 2x2 + 2x3 − 4x4
3= −7
3
Ası, el conjunto solucion es:
CS = {X} =
x1x2x3x4
=
−7
3
−8
−3
3
Metodo de Matriz de Coeficientes Triangular Inferior
Sea A ·X = B un sistema de ecuaciones lineales con solucion unica (de(A) 6= 0) en el que lamatriz de coeficientes Anxn es triangular inferior. Entonces los elementos de la solucion se puedencalcular mediante el metodo de sustitucion progresiva, es decir, se despeja la primera incognita dela primera ecuacion, se sustituye en la segunda ecuacion; despues se despeja de esta ecuacion lasegunda incognita y se repite el proceso hacia abajo hasta calcular el valor de la ultima incognita.
Esto es, dado el S.E.L.a11x1 = b1a21x1 + a22x2 = b2. . . . . . . . . . . . . . . . . . . . . . . . . . .
an1x1 + an2x2 + an3x3 + . . . annxn = bn
De la primera ecuacion, se obtiene x1 =b1a11
Reemplazando en la segunda ecuacion, se obtiene x2, siguiendo ası, por sustitucion progresiva,se obtiene en forma general:
xi =1
aii·
(bi −
i−1∑j=1
aijxj
), i = 1, 2, · · · , n
Ejemplo 4.4.3 Sea el S.E.L.2x1 = 63x1 + 4x2 = −33x1 − 5x2 + 3x3 = 04x1 + 2x2 − 2x3 + 3x4 = −5
71

Aplicando sustitucion progresiva se obtiene:
x1 =6
2= 3,
x2 =−3− 3x1
4= −12
4= −3,
x3 =−3x1 + 5x2
3= −24
3= −8,
x4 =−5− 4x1 − 2x2 + 2x3
3= −27
3= −9
Ası, el conjunto solucion es:
CS = {X} =
x1x2x3x4
=
3−3−8−9
4.4.3. Metodos de Eliminacion
Metodo de Eliminacion Simple de Gauss
El Metodo de Eliminacion de Gauss es el metodo estandar para resolver SEL, ya sea a manocon calculadora o con computadora.
Cuando el SEL es de dimension pequena casi no se presentan inconvenientes a la hora dehallar la solucion. Cuando la dimension del sistema es grande, es decir maneja un centenar o unmillar de incognitas, hasta la computadora mas grande y mas rapida puede presentar problemasde precision y es aquı cuando se presentan preguntas como:
1. ¿Como almacenar los SEL grandes en la computadora?
2. ¿Como saber si las respuestas obtenidas son correctas?
3. ¿Cual es la precision de los resultados obtenidos?
4. ¿Cuanto tiempo llevara obtener los resultados?
5. ¿El algoritmo aplicado puede fallar en algun momento?
6. ¿El algoritmo sera inestable para algunos sistemas?
7. ¿La inestabilidad se puede controlar pivotando?(intercambiando filas)
8. ¿Como pivotar para resolver el problema de la inestabilidad?
9. ¿Como saber si un sistema esta mal condicionado?
Considere el sistema de ecuaciones lineales A · X = B, con A = [aij]n×n, X = [xi]n×1 ,B = [bi]n×1 y A∗ = [A|B].
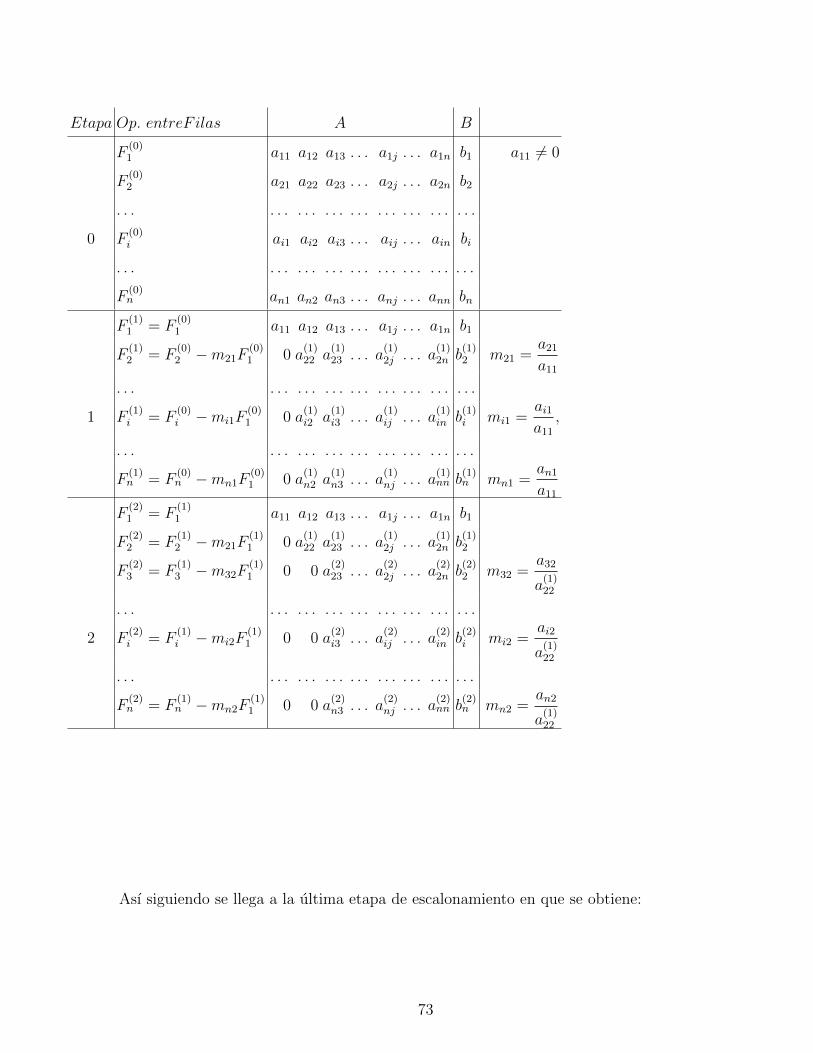
Mediante operaciones elementales entre las filas de A∗, el Metodo de Eliminacion Simple deGauss transforma el sistema ecuaciones lineales dado, en un sistema equivalente de la formaU ·X = H. Para este segundo sistema se tiene que U∗ = [U |H] es una matriz triangular superior,ası la solucion se obtiene efectuando sustitucion regresiva.
72
Etapa Op. entreF ilas A B
F(0)1 a11 a12 a13 . . . a1j . . . a1n b1 a11 6= 0
F(0)2 a21 a22 a23 . . . a2j . . . a2n b2
. . . . . . . . . . . . . . . . . . . . . . . . . . .
0 F(0)i ai1 ai2 ai3 . . . aij . . . ain bi
. . . . . . . . . . . . . . . . . . . . . . . . . . .
F(0)n an1 an2 an3 . . . anj . . . ann bn
F(1)1 = F
(0)1 a11 a12 a13 . . . a1j . . . a1n b1
F(1)2 = F
(0)2 −m21F
(0)1 0 a
(1)22 a
(1)23 . . . a
(1)2j . . . a
(1)2n b
(1)2 m21 =
a21a11
. . . . . . . . . . . . . . . . . . . . . . . . . . .
1 F(1)i = F
(0)i −mi1F
(0)1 0 a
(1)i2 a
(1)i3 . . . a
(1)ij . . . a
(1)in b
(1)i mi1 =
ai1a11
,
. . . . . . . . . . . . . . . . . . . . . . . . . . .
F(1)n = F
(0)n −mn1F
(0)1 0 a
(1)n2 a
(1)n3 . . . a
(1)nj . . . a
(1)nn b
(1)n mn1 =
an1a11
F(2)1 = F
(1)1 a11 a12 a13 . . . a1j . . . a1n b1
F(2)2 = F
(1)2 −m21F
(1)1 0 a
(1)22 a
(1)23 . . . a
(1)2j . . . a
(1)2n b
(1)2
F(2)3 = F
(1)3 −m32F
(1)1 0 0 a
(2)23 . . . a
(2)2j . . . a
(2)2n b
(2)2 m32 =
a32
a(1)22
. . . . . . . . . . . . . . . . . . . . . . . . . . .
2 F(2)i = F
(1)i −mi2F
(1)1 0 0 a
(2)i3 . . . a
(2)ij . . . a
(2)in b
(2)i mi2 =
ai2
a(1)22
. . . . . . . . . . . . . . . . . . . . . . . . . . .
F(2)n = F
(1)n −mn2F
(1)1 0 0 a
(2)n3 . . . a
(2)nj . . . a
(2)nn b
(2)n mn2 =
an2
a(1)22
Ası siguiendo se llega a la ultima etapa de escalonamiento en que se obtiene:
73

Etapa Op. entreF ilas A B
F(n)1 = F
(0)1 a11 a12 a13 . . . a1j . . . a1n b1
F(n)2 = F
(1)2 0 a
(2)22 a
(2)23 . . . a
(2)2j . . . a
(2)2n b
(2)2
. . . . . . . . . . . . . . . . . . . . . . . . . . .
n F(n)i = F
(i−1)i 0 0 0 . . . a
(i)ij . . . a
(i)in b
(i)i
. . . . . . . . . . . . . . . . . . . . . . . . . . .
F(n)n−1 = F
(n−2)n−1 0 0 0 . . . 0 a
(n−1)n−1n−1 a
(n−1)n−1n b
(n−1)n
F(n)n = F
(n−1)n −mn(n−1)F
(n−1)n−1 0 0 0 . . . 0 0 a
(n)nn b
(n)n mn(n−1) =
a(n−1)n(n−1)
a(n−1)(n−1)(n−1)
Las condiciones generales del metodo son:
a(0)ij = aij
a(k−1)kk 6= 0
a(k)ij = a
(k−1)ij −mik · a(k−1)kj k = 1, ..., n− 1
b(k)i = b
(k−1)i −mik · b(k−1)k i, j = k + 1, ...n
mik =a(k−1)ik
a(k−1)kk
Para el SEL A ·X = B se obtuvo el sistema equivalente UX = H que se extrae de la ultimaetapa del escalonamiento como sigue:
u11x1 + u12x2 + ... + u1nxn = h1+ u22x2 + ... + u2nxn = h2. . . . . . . . . . . . . . . . . . . . . . . .
unnxn = hn
El conjunto de soluciones del sistema es CS = {X} =
x1x2. . .xn
se obtiene empleando la
sustitucion regresiva como sigue:
74

xn =hnunn
xk =
[hk −
n∑j=k+1
ukj · xj
]· 1
ukk, k = n− 1, ..., 1
Ejemplo 4.4.4 Aplicar el Metodo de Eliminacion Simple de Gauss para resolver el sistema deecuaciones lineales que sigue:
2x + y + 3z = 6−4x − y = −7
6x − 2y − z = 13
La forma matricial A ·X = B delsistema es: 2 1 3−4 −1 0
6 −2 −1
· xyz
=
6−713
Ahora se efectua el escalonamiento de la matriz de coeficientes ampliada:
Etapa Op. entreF ilas A B
F(0)1 2 1 3 6 a11 = 2 6= 0
0 F(0)2 −4 −1 0 −7
F(0)3 6 −2 −1 13
F(1)1 = F
(0)1 2 1 3 6
1 F(1)2 = F
(0)2 −
(−4
2
)F
(0)1 0 1 6 5 m21 =
a21a11
=−4
2= −2
F(1)3 = F
(0)3 −
(6
2
)F
(0)1 0 −5 −10 −5 m31 =
a31a11
=6
2= 3
F(2)1 = F
(1)1 2 1 3 6
2 F(2)2 = F
(1)2 0 1 6 5
F(2)3 = F
(1)3 −
(−5
1
)F
(1)2 0 0 20 20 m32 =
a32a22
=−5
1= −5
El sistema equivalente al original es:2x + y + 3z = 6
y + 6z = 520z = 20
Aplicando sustitucion regresiva seobtiene:
z = 1, y = −1 x = 2
Por lo tanto el conjunto solucion del sistema A ·X = B es:
CS = {X} =
2−1
1
75
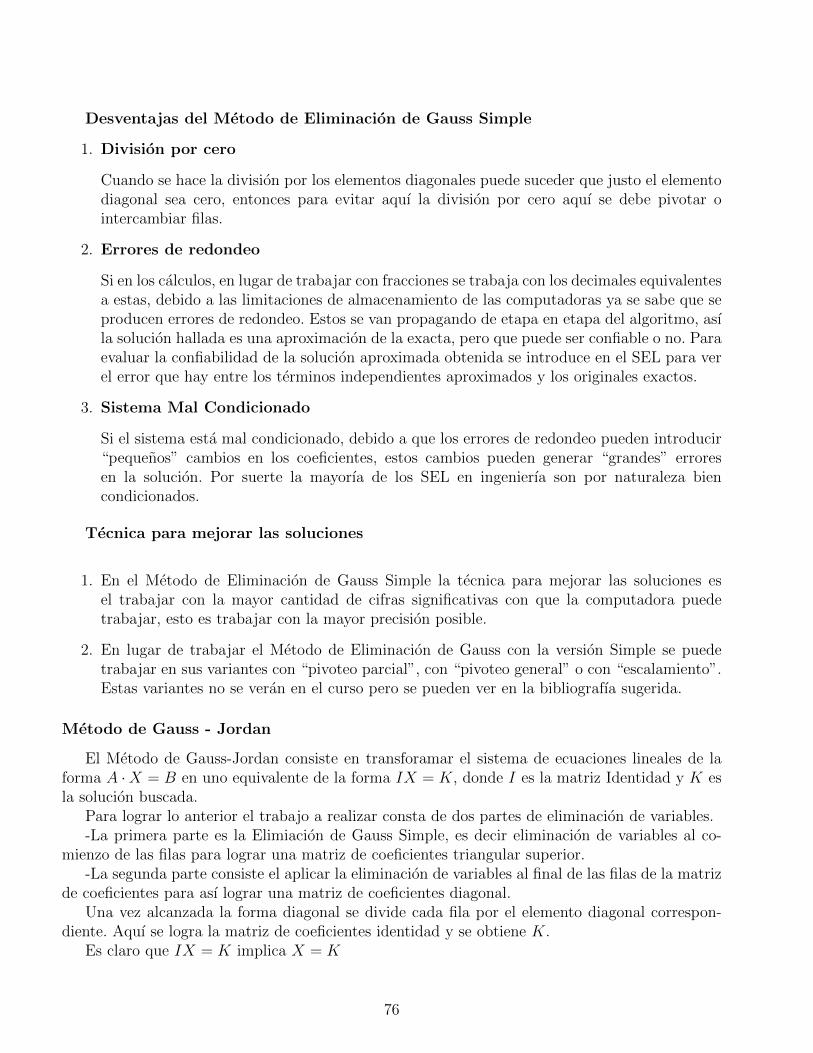
Desventajas del Metodo de Eliminacion de Gauss Simple
1. Division por cero
Cuando se hace la division por los elementos diagonales puede suceder que justo el elementodiagonal sea cero, entonces para evitar aquı la division por cero aquı se debe pivotar ointercambiar filas.
2. Errores de redondeo
Si en los calculos, en lugar de trabajar con fracciones se trabaja con los decimales equivalentesa estas, debido a las limitaciones de almacenamiento de las computadoras ya se sabe que seproducen errores de redondeo. Estos se van propagando de etapa en etapa del algoritmo, asıla solucion hallada es una aproximacion de la exacta, pero que puede ser confiable o no. Paraevaluar la confiabilidad de la solucion aproximada obtenida se introduce en el SEL para verel error que hay entre los terminos independientes aproximados y los originales exactos.
3. Sistema Mal Condicionado
Si el sistema esta mal condicionado, debido a que los errores de redondeo pueden introducir“pequenos” cambios en los coeficientes, estos cambios pueden generar “grandes” erroresen la solucion. Por suerte la mayorıa de los SEL en ingenierıa son por naturaleza biencondicionados.
Tecnica para mejorar las soluciones
1. En el Metodo de Eliminacion de Gauss Simple la tecnica para mejorar las soluciones esel trabajar con la mayor cantidad de cifras significativas con que la computadora puedetrabajar, esto es trabajar con la mayor precision posible.
2. En lugar de trabajar el Metodo de Eliminacion de Gauss con la version Simple se puedetrabajar en sus variantes con “pivoteo parcial”, con “pivoteo general” o con “escalamiento”.Estas variantes no se veran en el curso pero se pueden ver en la bibliografıa sugerida.
Metodo de Gauss - Jordan
El Metodo de Gauss-Jordan consiste en transforamar el sistema de ecuaciones lineales de laforma A ·X = B en uno equivalente de la forma IX = K, donde I es la matriz Identidad y K esla solucion buscada.
Para lograr lo anterior el trabajo a realizar consta de dos partes de eliminacion de variables.-La primera parte es la Elimiacion de Gauss Simple, es decir eliminacion de variables al co-
mienzo de las filas para lograr una matriz de coeficientes triangular superior.-La segunda parte consiste el aplicar la eliminacion de variables al final de las filas de la matriz
de coeficientes para ası lograr una matriz de coeficientes diagonal.Una vez alcanzada la forma diagonal se divide cada fila por el elemento diagonal correspon-
diente. Aquı se logra la matriz de coeficientes identidad y se obtiene K.Es claro que IX = K implica X = K
76

Ejemplo 4.4.5 Aplicar el Metodo de Gauss-Jordan para resolver el sistema de ecuaciones linealesque sigue:
2x + y + 3z = 6−4x − y = −7
6x − 2y − z = 13
La forma matricial A ·X = B delsistema es: 2 1 3−4 −1 0
6 −2 −1
· xyz
=
6−713
Ahora se efectua la eliminacion de variables en la matriz de coeficientes ampliada:
Etapa Op. entreF ilas A B
F(0)1 2 1 3 6 a11 = 2 6= 0
0 F(0)2 −4 −1 0 −7
F(0)3 6 −2 −1 13
F(1)1 = F
(0)1 2 1 3 6
1 F(1)2 = F
(0)2 −
(−4
2
)F
(0)1 0 1 6 5 m21 =
a21a11
=−4
2= −2
F(1)3 = F
(0)3 −
(6
2
)F
(0)1 0 −5 −10 −5 m31 =
a31a11
=6
2= 3
F(2)1 = F
(1)1 2 1 3 6
2 F(2)2 = F
(1)2 0 1 6 5
F(2)3 = F
(1)3 −
(−5
1
)F
(1)2 0 0 20 20 m32 =
a32a22
=−5
1= −5
F(3)1 = F
(2)1 −
3
20F
(2)3 2 1 0 3 m13 =
aa13a33
=3
20
3 F(2)2 = F
(1)2 −
6
20F
(2)3 0 1 0 −1 m23 =
aa23a33
=6
20
F(3)3 = F
(2)3 0 0 20 20
F(4)1 = F
(3)1 − F
(3)2 2 0 0 4 m12 =
aa12a22
=1
1= 1
4 F(4)2 = F
(3)2 0 1 0 −1
F(4)3 = F
(3)3 0 0 20 20
F(5)1 =
1
2F
(4)1 1 0 0 2
5 F(5)2 = F
(4)2 0 1 0 −1
F(5)3 =
1
20F
(4)3 0 0 1 1
Por lo tanto el conjunto solucion del sistema A ·X = B es:
CS = {X} =
2−1
1
77

4.5. Metodos de Descomposicion
4.5.1. Metodo LU
Proposicion 4.5.1 Si A ∈ Mn×n puede llevarse a una forma escalonada U ∈ Mn×n sin in-tercambiar filas, entonces existe una matriz triangular inferior L ∈ Mn×n con lii = 1, parai ∈ {1, . . . , n} tal que A = L · U . Si ademas A es inversible, entonces las matrices L y U sonunicas.
Calculo de las matrices L y U de la factorizacion L por U de una matrizinversible
Dada la matriz A, las matrices L y U se encuentran a partir de la eliminacion simple devariables en A.
L es la matriz triangular inferior que tiene unos en la diagonal y tiene los coeficientes mij
necesarios para la eliminacion de variables.U es la matriz de coeficientes triangular superior que se obtiene luego de la eliminacion de
variables.
L =
1 0 0 · · · 0m21 1 0 · · · 0m31 m32 1 · · ·· · · · · · · · · · · · · · ·mn1 mn2 mn3 · · · 1
U =
u11 u12 u13 · · · u1n0 u22 u23 · · · u2n0 0 u33 · · · u3n· · · · · · · · · · · · · · ·0 0 0 · · · unn
Ejemplo 4.5.1 Hallar la descomposicion LU de la matriz A =
2 1 3−4 −1 0
6 −2 −1
El primer paso es efectuar el escalonamiento de la matriz A:
Etapa Op. entreF ilas A
F(0)1 2 1 3 a11 = 2 6= 0
0 F(0)2 −4 −1 0
F(0)3 6 −2 −1
F(1)1 = F
(0)1 2 1 3
1 F(1)2 = F
(0)2 −
(−4
2
)F
(0)1 0 1 6 m21 =
a21a11
=−4
2= −2
F(1)3 = F
(0)3 −
(6
2
)F
(0)1 0 −5 −10 m31 =
a31a11
=6
2= 3
F(2)1 = F
(1)1 2 1 3
2 F(2)2 = F
(1)2 0 1 6
F(2)3 = F
(1)3 −
(−5
1
)F
(1)2 0 0 20 m32 =
a32a22
=−5
1= −5
78

Luego L =
1 0 0m21 1 0m31 m32 1
=
1 0 0−2 1 0
3 −5 1
y U =
2 1 30 1 60 0 20
Ejercicio 4.5.1 Verificar que se cumple A = LU
Solucion de un S.E.L aplicando descomposicion LU sin permutacion de filas
1. Sea el S.E.L A ·X = B, entonces por la proposicion 4.5.1:
a) existe una matriz triangular inferior L con lii = 1 y
b) existe una matriz triangular superior U ,
tales que:
2. A = L · U ,
3. (L · U) ·X = B,
4. L · (U ·X) = B,
5. Llamando U ·X = Y ,
6. Primero se resuelve el sistema L · Y = B, aplicando sustitucion progresiva
7. Una vez calculada Y , se resuelve el sistema U ·X = Y , aplicando sustitucion regresiva.
8. El conjunto solucion es CS = {X}.
Ejemplo 4.5.2 Aplique la descomposicion LU de A para resolver el sistema 2 1 3−4 −1 0
6 −2 −1
· xyz
=
6−713
Considerando la descomposicion LU de A que se hallo y los pasos descriptos anteriormente,
se plantean los sistemas triangulares a resolver:
1. A ·X = B
2. (LU) ·X = B
3. L · (U ·X) = B
79

Primero se resuelve L · Y = By1 = 6
−2y1 + y2 = −73y1 − 5y2 + y3 = 13
Aplicando sustitucion progresivase obtiene:
CS1 = {Y } =
6
520
Ahora se resuelve U · X = Y
2x1 + x2 + 3x3 = 6x2 + 6x3 = 5
20x3 = 20
Aplicando sustitucion regresiva seobtiene:
CS = {X} =
2−1
1
Factorizacion P · A = L · U
Ejemplo 4.5.3 Sea A =
0 −1 0−1 0 −1
1 1 0
(1) Obtenga una forma escalonada de A
(2) Construya la matriz P obtenida al permutar las mismas filas en la matriz identidad deorden 3.
(3) Realice el producto P · A.
(4) Compare los apartados (1) y (3), enuncie una conjetura y consulte con algun docente de laasignatura acerca de la validez de la misma.
sol.:
(1) El cuadro de datos y de calculos es:
80

operaciones entre las filasF1 0 -1 0F2 -1 0 -1F3 1 1 0
F(1)1 = F2 -1 0 -1
F(1)2 = F1 0 -1 0
F(1)3 = F3 1 1 0
F(2)1 = F
(1)1 -1 0 -1
F(2)2 = F
(1)2 0 -1 0
F(2)3 = F
(1)3 + F
(1)1 0 1 -1
F(3)1 = F
(2)1 -1 0 -1
F(3)2 = F
(2)2 0 -1 0
F(3)3 = F
(2)3 + F
(2)2 0 0 -1
Por lo tanto una forma escalonada de A es: U =
−1 0 −10 −1 00 0 −1
(2) Como para obtener una forma escalonada U de A, se han intercambiado la primera y la
segunda fila la matriz A entonces:
P =
0 1 01 0 00 0 1
.
(3) Luego P · A =
0 1 01 0 00 0 1
· 0 −1 0−1 0 −1
1 1 0
=
−1 0 −10 −1 01 1 0
.
Definicion 4.5.1 Pi es una matriz de permutacion elemental si se obtiene de la matrizidentidad permutando las filas j y k. P es una matriz de permutacion si es el productode matrices de permutacion elementales.
En otras palabras una matriz de permutacion de orden n tiene las mismas filas que la matrizidentidad de orden n en otro orden. Puede demostrase que al premultiplicar una matriz A por
81

una matriz de permutacion P se obtiene una matriz que tiene las mismas filas que A en elorden que estan permutadas las filas de P .
Ejemplo 4.5.4 Obtener una forma escalonada de la matriz A que se da a continuacion. Escribircada matriz de permutacion elemental que se emplea e indicar la matriz de permutacion resultante.
A =
−2 −7 17 −1 01 2 −1
.
sol.: Suponga que se obtenido una forma elemental de ella siguiendo la senda indicada en elcuadro siguiente.
Etapas operaciones entre las filasF1 -2 -7 1
(1) F2 7 -1 0F3 1 2 -1
F(1)1 = F3 1 2 -1
(2) F(1)2 = F2 7 -1 0
F(1)3 = F1 -2 -7 1
F(2)1 = F
(1)1 1 2 -1
(3) F(2)2 = F
(1)2 − 7 · F (1)
1 0 -15 7
F(2)3 = F
(1)3 + 2 · F (1)
1 0 -3 -1
F(3)1 = F
(2)1 1 2 -1
(4) F(3)2 = F
(2)3 0 -3 -1
F(3)3 = F
(2)2 0 -15 7
F(4)1 = F
(3)1 1 2 -1
(5) F(4)2 = F
(3)3 0 -3 -1
F(4)3 = F
(3)3 − 5 · F (3)
2 0 0 12
82

En la etapa (2) se ha empleado P1 =
0 0 10 1 01 0 0
; luego
P1 · A =
0 0 10 1 01 0 0
· −2 −7 1
7 −1 01 2 −1
=
1 2 −17 −1 0−2 −7 1
.En la etapa (4) se ha empleado P2 =
1 0 00 0 10 1 0
; luego
La matriz de permutacion es:
P = P2 · P1 =
1 0 00 0 10 1 0
· 0 0 1
0 1 01 0 0
=
0 0 11 0 00 1 0
,y se cumple:
P · A =
0 0 11 0 00 1 0
−2 −7 77 −1 01 2 −1
=
1 2 −1−2 −7 7
7 −1 0
Ejercicio 4.5.2 Compruebe que para B = P · A puede obtenerse una forma escalonada sinpermutar sus filas.
Proposicion 4.5.2 Si al obtener una forma escalonada de A se realizan m permutaciones yP = Pm . . . ·P2 ·P1 es la matriz de permutacion, entonces puede obtenerse una forma escalonadade B = P · A sin permutar sus filas.
Proposicion 4.5.3 Si A ∈ D, entonces existe una matriz de permutacion P ∈ Mn×n tal queP · A = L · U , donde L es una matriz triangular inferior tal que l11 = . . . = lnn = 1 y U esuna matriz triangular superior. Las matrices L y U son unicas para cada P .
Solucion de un S.E.L aplicando descomposicion LU con permutacion de filas
(1) Sea el S.E.L A ·X = H,
(2) Sea PA = L · U ,
(3) L es una matriz triangular inferior con lii = 1 y U es una matriz triangular superior.
(4) Se debe considerar el sistema P · A ·X = P ·H
83

(5) Llamando B = P ·H, el sistema a resolver sera P · A ·X = B
(7) (L · U) ·X = B,
(8) L · (U ·X) = B,
(9) Llamamos U ·X = Y ,
(10) Primero se resuelve el sistema L · Y = B aplicando sustitucion progresiva
(11) Una vez calculada Y , se resuelve el sistema U ·X = Y , aplicando sustitucion regresiva.
4.6. Metodo de Cholesky
4.6.1. Introduccion
El metodo de Cholesky es otro metodo de descomposicion que usa la factorizacion de unamatriz para resolver sistemas de ecuaciones lineales. En este caso la matriz de coeficientes delS.E.L, debe ser definida positiva y se factoriza como producto de una matriz triangular inferiorpor una matriz triangular superior (traspuesta de la anterior). Este metodo es tambien util paracalcular el determinante o la inversa de una matriz.
4.6.2. Descomposicion de Cholesky
Antes de la descomposicion se recordaran algunos conceptos basicos:
Definicion 4.6.1 Si A = [aij] ∈ Mn×n, se llaman menores principales de A a los numerosMi que son los determinantes de las submatrices de A formadas por las primeras i filas y lasprimeras i columnas de A. Es claro que Mn = |A| = det(A)
x
Definicion 4.6.2 Una matriz A = [aij] ∈Mn×n es definida positiva si es simetrica y se cumpleque los menores principales son positivos.
Ejemplo 4.6.1 Sean A =
54 −9 −3−9 18 7−3 7 6
, y B =
2 0 −20 3 0−2 0 2
.
(a) A es definida positiva ya que:
A es simetrica,
M1 = |54| = 54 > 0,
M2 =
∣∣∣∣ 54 −9−9 18
∣∣∣∣ = 54× 18− (−9)× (−9) = 891 > 0,
84

M3 = |A| = 54× (108− 49) + 9× (−54 + 21)− 3× (−63 + 54) = 2916 > 0,
por lo tanto A es difinida positiva.
(b) B no es definida positiva ya que
B es simetrica,
M1 = 2 > 0,
M2 = 2× 3 = 6 > 0,
M3 = |B| = 3× (4− 4) = 0 6> 0,
por lo tanto B no es difinida positiva.
Proposicion 4.6.1 Si A ∈ Mn×n es simetrica y definida positiva, entonces existe una unicamatriz triangular superior S ∈Mn×n, con sjj > 0 para j = 1, . . . , n, tal que:
A = S ′ · S
La descomposicion anterior se denomina factorizacion de Cholesky.
Deduccion de los elementos de la matriz S
La deduccion del metodo vale para todo n finito.
A continuacion se muestra dicha deduccion para el calculo de la matriz S de la factorizacionde Cholesky para el caso n = 4.
Sea A ∈M4×4 simetrica y definida positiva y sea S ∈M4×4 triangular superior con sjj > 0,para j = 1, . . . , 4 tal que A = S ′ · S. donde
1. S = [sij] es triangular superior y sjj > 0 para j = 1, . . . , 4. [hip.]
2.
a11 a12 a13 a14a21 a22 a23 a24a31 a32 a33 a34a41 a42 a43 a44
=
s11 0 0 0s12 s22 0 0s13 s23 s33 0s14 s24 s43 s44
·s11 s12 s13 s14
0 s22 s23 s240 0 s33 s340 0 0 s44
[(1), (2)]
Efectuando el producto y teniendo en cuenta que dos matrices son iguales si y solo si tienenel mismo orden y los elementos que ocupan el mismo lugar son iguales, se tiene:
• Para la primera fila:
a11 = s211, a12 = s11 · s12, a13 = s11 · s13, a14 = s11 · s14.
Despejando se obtiene:
s11 =√a11, s12 =
a12
s11, s13 =
a13
s11, s14 =
a14
s11.
85

Como s11 =√a11 y A es definida positiva, resulta s11 > 0.
• Para la segunda fila:
a22 = s212 + s222, a23 = s12 · s13 + s22 · s23, a24 = s12 · s14 + s22 · s24.
Despejando se obtiene:
s22 =√
a22 − s212, s23 =a23 − s12 · s13
s22, s24 =
a24 − s12 · s14s22
.
Luego s22 =
√a22 −
a212a11
=
√a22 · a11 − a212
a11.
(¿Por que es s22 > 0?)
• Para la tercera fila:
a33 = s213 + s223 + s233, a34 = s13 · s14 + s23 · s24 + s33 · s34.
Despejando:
s33 =√
a33 − s213 − s223, s34 =a34 − s13 · s14 − s23 · s24
s33.
(¿Por que es s33 > 0?)
• Para la cuarta fila:
a44 = s214 + s224 + s234 + s244
Finalmente, despejando resulta:
s44 =√a44 − s214 − s224 − s234
(¿Por que es s44 > 0?)
4.6.3. Solucion de sistemas de ecuaciones lineales utilizando la des-composicion de Cholesky.
El objetivo ahora es utilizar la descomposicion de Cholesky para resolver sistemas de ecuacioneslineales, en la misma forma que se hizo con el metodo de descomposicion LU.
1. Sea el S.E.L. A ·X = B,
2. tal que A simetrica y definida positiva, entonces por la proposicion 4.6.1
a) existe una matriz triangular superior S con
b) sjj > 0, j = 1, . . . , n
86

tal que
3. A = S ′ · S.
4. S ′ · (S ·X) = B
5. Llamando ahora S ·X = Y
6. Primero se resuelve el sistema S ′ · Y = B
7. Una vez obtenida Y , se resuelve el sistema S ·X = Y
8. El conjunto solucion es CS = {X}.
Ejemplo 4.6.2 Use la descomposicion de Cholesky de la matriz C =
4 2 22 26 212 21 18
para resolver
el sistema C ·X =
210
.
Se puede verificar que aplicando las fomulas para hallar S y aplicando los pasos antes descriptospara resolver el sistema se obtiene:
S =
2 1 10 5 40 0 1
Y =
10−1
y CS = {X} =
3/5
4/5−1
Observaciones 4.6.1
1. Es importante aclarar que si A ∈ Mn es definida positiva, entonces la descomposicionde Cholesky tambien suele presentarse en funcion de una matriz triangular inferior L queverifica A = L · LT con lii > 0.
2. Cuando se trabaja con MATLAB, este por defecto arroja la matriz S, pero puede pedirse lamatriz L.
4.7. Metodos Iterativos
4.7.1. Introduccion
Dado el sistema de ecuaciones lineales AX = B, en esta seccion se hallara la solucionmediante la implementacion de metodos iterativos. Estos metodos se usan cuando los sistemas deecuaciones lineales son muy grandes y los metodos antes vistos tanto metodos de eliminacion ocomo de factorizacion comienzan a ser inadecuados debido a los errores de redondeo.
Estos nuevos metodos que se veran producen X(0), X(1), X(2), ..., una sucesion de aproxima-ciones a la solucion del sistema de ecuaciones lineales AX = B. La idea es que dicha sucesion de
87

aproximaciones converja a la solucion real. El proceso se puede detener cuando se ha alcanzado laprecision suficiente o deseada.
Entre los metodos iterativos mas empleados estan el metodo de Gauss- Jacobi (o simplementeJacobi) y el metodo de Gauss-Seidel. Ambos metodos tienen una version escalar y la versionmatricial.
4.7.2. Metodo de Gauss- Jacobi Escalar
Sea el sistema de ecuaciones lineales:a11x1 + a12x2 + a13x3 . . . +a1nxn = b1a21x1 + a22x2 + a23x3 . . . +a2nxn = b2...an1x1 + an2x2 + an3x3 . . . +annxn = bn
Para aplicar el metodo de Gauss-Jacobi esacalar se procede como sigue:
1. Se analiza si el sistema o la matriz de coeficientes del sistema, tiene diagonal dominante,esto es, si:
|aii| >n∑
i=1j 6=i
|aij| para todo i = 1, 2, ..., n
2. En cada una de las ecuaciones, se despeja la incognita que acompana al coeficiente diagonalaii y se definen las formulas generales iterativas:
x(k+1)1 =
b1 − a12 · x(k)2 − a13 · x(k)3 . . .− a1n · x(k)n
a11
x(k+1)2 =
b2 − a21 · x(k)1 − a23 · x(k)3 . . .− a2n · x(k)n
a22...
x(k+1)n =
bn − an1 · x(k)1 − an2 · x(k)2 − an3 · x
(k)3 . . .− ann−1 · x(k)n−1
ann
3. Para cada una de las incognitas, se consideran los valores iniciales x(0)1 , x
(0)2 , . . . , x
(0)n .
Generalmente x(0)i = 0 para todo i = 1, 2, .., n,
4. Se efectuan las iteraciones hasta alcanzar una precision deseada ε> 0. Dicha precision seconsigue cuando el error entre iteraciones E(k+1) = max
i=1...n{|x(k+1)
i −x(k)i |} < ε.
Aquı se debe tener en cuenta que hay error de redondeo por los calculos ytambien error de truncamiento por detener el proceso iterativo.
88

Ejemplo 4.7.1 Resolver el siguiente sistema aplicando el metodo de Gauss- Jacobi considerandox(0)i = 0 para todo i = 1, 2, 3 y precision de ε= 10−2
−4x1 + 40x2 + x3 = 3714x1 + x2 + x3 = 16x1 − x2 − 16x3 = −15
1. Se observa que no hay diagonal dominante, luego se intercambian las ecuaciones para con-seguirlo.
14x1 + x2 + x3 = 16−4x1 + 40x2 + x3 = 37x1 − x2 − 16x3 = −15
2. Ahora se definen las formulas iterativas y se establecen los valores iniciales:
Formulas Iterativas:
x(k+1)1 =
16− x(k)2 − x(k)3
14
x(k+1)2 =
37 + 4x(k)1 − x
(k)3
40
x(k+1)3 =
15 + x(k)1 − x
(k)2
16
Valores iniciales:
x(0)1 = 0
x(0)2 = 0
x(0)3 = 0
3. Se comienza a iterar:
Iteracion 1
x(1)1 =
16− x(0)2 − x(0)3
14=
16
14= 1.142857143
x(1)2 =
37 + 4x(0)1 − x
(0)3
40=
37
40= 0.925
x(1)3 =
15 + x(0)1 − x
(0)2
16=
15
16= 0.9375
E(1) = max1≤i≤3
{|x(1)i − x(0)i |} = 1.142857143
Iteracion 2
x(2)1 =
16− x(1)2 − x(1)3
14= 1.009821429
x(2)2 =
37 + 4x(1)1 − x
(1)3
40= 1.015848214
x(2)3 =
15 + x(1)1 − x
(1)2
16= 0.951116071
E(2) = max1≤i≤3
{|x(2)i − x(1)i |} = 0.133035714
89

Iteracion 3
x(3)1 =
16− x(2)2 − x(2)3
14= 1.002359694
x(3)2 =
37 + 4x(2)1 − x
(2)3
40= 1.002204241
x(3)3 =
15 + x(2)1 − x
(2)2
16= 0.937123325
E(3) = max1≤i≤3
{|x(3)i − x(2)i |} = 0.013992745
Iteracion 4
x(4)1 =
16− x(3)2 − x(3)3
14= 1.004333745
x(4)2 =
37 + 4x(3)1 − x
(3)3
40= 1.001807886
x(4)3 =
15 + x(3)1 − x
(3)2
16= 0.937509715
E(4) = max1≤i≤3
{|x(4)i −x(3)i |} = 0.001974051 < ε
4. Por lo tanto, con la precision fijada, la mejor aproximacion a la solucion, o el Conjunto deSoluciones aproximado es:
CS ≈ {(1.0043337, 1.001807, 0.9375097)}
.
4.7.3. Metodo de Gauss-Seidel Escalar
Sea el sistema de ecuaciones linealesa11x1 + a12x2 + a13x3 . . . +a1nxn = b1a21x1 + a22x2 + a23x3 . . . +a2nxn = b2...an1x1 + an2x2 + an3x3 . . . +annxn = bn
1. Para aplicar el metodo de Gauss- Seidel escalar, tambien el sistema o la matriz de coefici-cientes debe tener diagonal dominante, esto es:
|aii| >n∑
i=1j 6=i
|aij| para todo i = 1, 2, ..., n
2. En cada una de las ecuaciones se despeja la incognita que acompana al coeficiente diagonalaii y se definen las formulas generales iterativas.
90

La diferencia con el metodo de Gauss-Jacobi es que ahora para la iteracion (k + 1) seutilizan tantos valores de la iteracion anterior (k), como los ya calculados en la iteracion(k + 1).
x(k+1)1 =
b1 − a12 · x(k)2 − a13 · x(k)3 . . .− a1n · x(k)n
a11
x(k+1)2 =
b2 − a21 · x(k+1)1 − a23 · x(k)3 . . .− a2n · x(k)n
a22...
x(k+1)n =
bn − an1 · x(k+1)1 − an2 · x(k+1)
2 − an3 · x(k+1)3 . . .− ann−1 · x(k+1)
n−1
ann
3. Para cada una de las incognitas, se consideran los valores iniciales x(0)1 , x
(0)2 , . . . , x
(0)n .
Generalmente x(0)i = 0 para todo i = 1, 2, .., n,
4. Se efectuan las iteraciones hasta alcanzar una precision deseada ε> 0. Dicha precision seconsigue cuando el error entre iteraciones E(k+1) = max
i=1...n{|x(k+1)
i −x(k)i |} < ε.
Aquı tambien se debe tener en cuenta que hay error de redondeo por loscalculos y tambien error de truncamiento por detener el proceso iterativo.
Ejemplo 4.7.2 Resolver el sistema del ejemplo anterior, aplicando el metodo de Gauss- Seidel,considerando x
(0)i = 0 para todo i = 1, 2, 3 y precision de ε= 10−2.
14x1 + x2 + x3 = 16−4x1 + 40x2 + x3 = 37x1 − x2 − 16x3 = −15
1. Se observa que el sistema posee diagonal dominante, ası que se definen las formulas iterativasy se establecen los valores iniciales:
Formulas Iterativas
x(k+1)1 =
16− x(k)2 − x(k)3
14
x(k+1)2 =
37 + 4x(k+1)1 − x(k)3
40
x(k+1)3 =
15 + x(k+1)1 − x(k+1)
2
16
Valores iniciales:
x(0)1 = 0
x(0)2 = 0
x(0)3 = 0
2. Se comienza a iterar:
91

Iteracion 1
x(1)1 =
16− x(0)2 − x(0)3
14=
16
14= 1.142857143
x(1)2 =
37 + 4x(1)1 − x
(0)3
40= 1.039285714
x(1)3 =
15 + x(1)1 − x
(1)2
16= 0.943973214
E(1) = max1≤i≤3
{|x(1)i − x(0)i |} = 1.142857143
Iteracion 2
x(2)1 =
16− x(1)2 − x(1)3
14= 1.001195791
x(2)2 =
37 + 4x(2)1 − x
(1)3
40= 1.001520249
x(2)3 =
15 + x(2)1 − x
(2)2
16= 0.937479721
E(2) = max1≤i≤3
{|x(2)i − x(1)i |} = 0.141661352
Iteracion 3
x(3)1 =
16− x(2)2 − x(2)3
14= 1.004357145
x(3)2 =
37 + 4x(3)1 − x
(2)3
40= 1.001998721
x(3)3 =
15 + x(3)1 − x
(3)2
16= 0.937647401
E(3) = max1≤i≤3
{|x(3)i −x(2)i |} = 6.493492905 ·10−3 < ε
3. Por lo tanto, con la precision fijada, la mejor aproximacion a la solucion, o el Conjunto deSoluciones aproximado es:
CS ≈ {(1.004357145, 1.001998721, 0.937647401)}
.
Se observa que la precision se alcanza con una iteracion menos que en el ejemplo resueltopor Gauss- Jacobi. Esto se debe a la forma de ir empleando los valores halladas.
En general el Metodo de Gauss-Seidel converge mas rapido que el de Gauss-Jacobi.
Teorema 4.7.1 Teorema de Convergencia: Sea AX = B un sistema de ecuaciones lineales, siA tiene diagonal dominante, entonces los metodos de Gauss-Seidel y de Gauss-Jacobi convergenpara cualquier valor inicial X(0).
92

Definicion 4.7.1 A = [aij] tiene diagonal dominante si y solo si
|aii| >n∑
i=1j 6=i
|aij| para todo i = 1, 2, ..., n.
4.8. Versiones Matriciales
En lo que sigue, dado un S.E.L. A ·X = B, la matriz de coeficientes
A =
a11 a12 a13 . . . a1na21 a22 a23 . . . a2n. . . . . . . . . . . . . . .an1 an2 an3 . . . ann
se considera como A = L+D + U , donde:
• L es la matriz triangular inferior L =
0 0 0 · · · 0a21 0 0 · · · 0a31 a32 0 · · · 0· · · · · · · · · · · · · · ·an1 an2 an3 · · · 0
,
• D es la matriz diagonal D =
a11 0 0 · · · 00 a22 0 · · · 00 0 a33 · · · 0· · · · · · · · · · · · · · ·0 0 0 · · · ann
• U es la matriz triangular superior U =
0 a12 a13 · · · a1n0 0 a23 · · · a2n0 0 0 · · · a3n· · · · · · · · · · · · · · ·0 0 0 · · · ann
Esto es:
a11 a12 . . . a1na21 a22 . . . a2na31 a32 . . . a3n· · · · · · · · ·an1 an2 . . . ann
=
0 0 . . . 0a21 0 . . . 0a31 a32 . . . 0· · · · · · · · ·an1 an2 · · · 0
+
a11 0 · · · 00 a22 · · · 00 0 · · · 0... · · · · · ·0 0 · · · ann
+
0 a12 . . . a1n0 0 · · · a2n0 0 · · · a3n· · · · · · · · ·0 0 · · · 0
93

4.8.1. Metodo de Gauss-Jacobi Matricial
Dado el sistema de ecuaciones lineales: AX = B, considerando A = L + D + U luego setiene:
AX = B
(L+D + U)X = B
DX = B − (L+ U)X
X = D−1B −D−1(L+ U)X
Luego la formula iterativa es:
X(k+1) = D−1B −D−1(L+ U)X(k)
X(k+1) = B1 + A1X(k), con B1 = D−1B y A1 = −D−1(L+ U)
El error cometido en cada iteracion es: E(k+1) = ‖X(k+1) −X(k)‖∞
El proceso iterativo se puede detener al alcanzar una precision ε> 0 deseada.
Para saber de forma anticipada cuantas iteraciones se necesitan para lograrE(k+1) < ε, se puede probar que el numero de iteraciones necesarias parallegar a la precision deseada es:
N ≥ln
(ε
‖B1‖∞
)ln(‖A‖∞)
con B1 = D−1B y A1 = −D−1(L+ U)
¿Como serıa los explicado anteriormente?
AX = B
a11 a12 . . . a1na21 a22 . . . a2na31 a32 . . . a3n...
......
an1 an2 . . . ann
·x1x2x3...xn
=
b1b2b3...bn
94

(L+D + U)X = B
0 0 . . . 0a21 0 . . . 0a31 a32 . . . 0...
......
an1 an2 . . . 0
+
a11 0 . . . 00 a22 . . . 00 0 . . . 0...
......
0 0 . . . ann
+
0 a12 . . . a1n0 0 . . . a2n0 0 . . . a3n...
... an−1n0 0 . . . 0
·x1x2x3...xn
=
b1b2b3...bn
DX + (L+ U)X = B
a11 0 . . . 00 a22 . . . 00 0 . . . 0...
......
0 0 . . . ann
·x1x2x3...xn
+
0 a12 a13 . . . a1na21 0 a23 . . . a2na31 a32 0 . . . a3n...
......
an1 an2 an3 . . . 0
·x1x2x3...xn
=
b1b2b3...bn
DX = −(L+ U)X +B
a11 0 . . . 00 a22 . . . 00 0 . . . 0...
......
0 0 . . . ann
·x1x2x3...xn
=
0 −a12 . . . −a1n−a21 0 . . . −a2n−a31 −a32 . . . −a3n
......
...−an1 −an2 . . . 0
·x1x2x3...xn
+
b1b2b3...bn
X = D−1(−(L+ U)X +B)
x1x2x3...xn
=
1/a11 0 . . . 0
0 1/a22 . . . 00 0 . . . 0...
......
0 0 . . . 1/ann
·
0 −a12 . . . −a1n−a21 0 . . . −a2n−a31 −a32 . . . −a3n
......
...−an1 −an2 . . . 0
·x1x2x3...xn
+
b1b2b3...bn
X =
x1x2x3...xn
=
0 −a12/a11 . . . −a1n/a11
−a21/a22 0 . . . −a2n/a22−a31/a33 −a32/a33 . . . −a3n/a33
......
...−an1/ann −an2/ann . . . 0
·x1x2x3...xn
+
b1/a11b2/a22b3/a33
...bn/ann
95

X = A1 ·X +B1 = G(X) A1 = −D−1(L+ U)
Formulas Iterativas
X(k+1) = A1 ·X(k) +B1 = G(X(k)) B1 = D−1 ·B
Iteraciones:
X(0) = θ
X(1) = A1 ·X(0) +B1 = B1
X(2) = A1 ·X(1) +B1 = A1 ·B1 +B1
X(3) = A1 ·X(2) +B1 = A1(A1 ·B1 +B1) +B1 = A21 ·B1 + A1 ·B1 +B1
X(4) = A1 ·X(3) +B1 = A1(A21 ·B1 + A1 ·B1 +B1) +B1
= A31 ·B1 + A2
1 ·B1 + A1 ·B1 +B1
Ası siguiendo, la formula general es:
X(k+1) = Ak1 ·B1 + Ak+1
1 ·B1 + . . .+ A1 ·B1 +B1
El error entre iteraciones es:
E(k+1) = ‖X(k+1) −X(k)‖∞
4.8.2. Metodo de Gauss-Seidel Matricial
Dado el sistema de ecuaciones lineales AX = B, considerando A = L + D + U luego setiene:
AX = B
(L+D + U)X = B
(L+D)X = B − UXX = (L+D)−1(B − UX)
X = (L+D)−1B − (L+D)−1UX
96

Formulas Iterativas
X(k+1) = (L+D)−1B − (L+D)−1UX(k)
X(k+1) = B1 + A1X(k), con B1 = (L+D)−1B y A1 = −(L+D)−1U
El error entre iteraciones es:
E(k+1) = ‖X(k+1) −X(k)‖∞
El Metodo de Gauss-Seidel Matricial no tiene forma de predecir el numero de iteraciones
con el cual se alcanzara la precision ε> 0 deseada.
La forma de trabajar ahora con la matriz L + D implica el uso de X(k)
calculados en la etapa anterior y de los elementos hallados de X(k+1) cal-culados en la etapa presente, para ir calculando los restantes elementos deX(k+1).
Observacion 4.8.1 La aplicacion del Metodo de Gauss-Seidel Matricial solo se vera en el Gabi-nete de Computacion.
97