SISTEMAS LINEALES INCONSISTENTES Y AJUSTE DE REDES GPS
130
1 SISTEMAS LINEALES INCONSISTENTES Y AJUSTE DE REDES GPS RAUL MARQUEZ
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of SISTEMAS LINEALES INCONSISTENTES Y AJUSTE DE REDES GPS

1
SISTEMAS LINEALES INCONSISTENTES
Y
AJUSTE DE REDES GPS RAUL MARQUEZ

2
INDICE página Introducción …………………………………………………………………3-4 1.- Sistemas de Ecuaciones Lineales Inconsistentes …………………………..5 2.- Valores Propios y Vectores Propios ………………………………………15 3.- Forma Diagonal de una Matriz Simétrica bajo Equivalencia Ortogonal …18 4.- Descomposición en Valores Singulares …………………………………...28 5.- Mínimos Cuadrados Ponderados…………………………………………..33 6.- Ajuste de Redes GPS………………………………………………………43 - Ecuaciones de Observación para Componentes…………………………...47 - Ecuaciones de Observación para Distancias………………………………48 - Ecuaciones de Observación para Coordenadas……………………………49 - La matriz de los Pesos……………………………………………………..50 - La prueba Chi- Cuadrado………………………………………………….55 - Ajuste Libre y Vinculado………………………………………………….57 - La Red Optima…………………………………………………………….57 - Fiabilidad………………………………………………………………….62 - Control de Errores Groseros………………………………………………66 - Fiabilidad Interna…………………………………………………………71 - Fiabilidad Externa………………………………………………………...72 7.- Ajuste de una Red GPS Real……………………………………………75 8.- Diseño Satisfactorio de Redes GPS……………………………………..97 9.- Anexo…………………………………………………………………..107 Bibliografía…………………………………………………………………130

3
INTRODUCCION El ajuste de las redes topogeodésicas y de las redes GPS en particular, requiere del planteo y solución de sistemas lineales que presentan las siguientes características:
i) el número de ecuaciones supera al número de incógnitas ii) el vector de los términos independientes no pertenece al espacio columna de
la matriz de coeficientes
En virtud de la característica i) estos sistemas lineales son superdeterminados, y por la ii) son inconsistentes debido a los errores de observación que afectan al vector de términos independientes, impidiéndole pertenecer al espacio columna de la matriz de coeficientes. La inconsistencia del sistema lineal, tiene como consecuencia la imposibilidad de hallar una solución por los métodos clásicos (la eliminación gaussiana, por ejemplo). La solución surge entonces de la aplicación del principio de los mínimos cuadrados de Gauss, y se llama, precisamente, la solución mínimos cuadrados. Si la red está vinculada a un número suficiente de constreñimientos externos, la solución mínimos cuadrados es única, puesto que en ese caso no existe el defecto del datum y tanto la matriz de coeficientes como la matriz normal resultan de rango completo. Por el contrario, si la red es libre, el defecto del datum da lugar a que ambas matrices sean defectuosas de rango y, en consecuencia, existan infinitas soluciones mínimos cuadrados. En la sección 1, “sistemas de ecuaciones lineales inconsistentes”, se presenta un método para hallar la solución óptima; es decir la solución mínimos- cuadrados y mínima- norma, que se obtiene como la proyección de una solución particular sobre el espacio fila de la matriz normal. Si bien este método tiene valor teórico, no resulta práctico para programarlo en una computadora. La sección 2 está dedicada al estudio de ciertas propiedades de los “valores propios y vectores propios” de las matrices simétricas. En la sección 3, se describe “la forma diagonal de una matriz simétrica bajo equivalencia ortogonal”, que conduce a la pseudoinversa de Moore-Penrose. La pseudoinversa en cuestión permite hallar la solución óptima en forma directa cual si fuera una regla práctica, tanto en los casos de rango completo como en los de deficiencia de rango. La pseudoinversa de Moore-Penrose se construye a partir de los valores propios y los vectores propios de la matriz normal. En la sección 4 aparece la “descomposición en valores singulares” y su relación con la forma diagonal bajo equivalencia ortogonal. La sección 5 se dedica al caso de “los mínimos cuadrados ponderados”, ligados íntimamente al ajuste de las redes topogeodésicas. La aplicación de la ley general de la propagación de la varianza-covarianza, da lugar a la estimación de los errores estándar de las incógnitas ajustadas y sus correlaciones. En la sección 6, se describe el planteo de las ecuaciones de observación en el “ajuste de redes GPS” y la solución del correspondiente sistema lineal inconsistente, mediante la aplicación de los métodos presentados en las secciones anteriores. Se incluye también, el concepto de la red óptima, conjuntamente con la fiabilidad interna y externa de redes, delineando la teoría de Baarda. Se presenta un criterio para escalar la matriz varianza-covarianza de las componentes de un vector GPS, a fin de lograr que la matriz de los pesos se compatible con los errores estándar especificados de las distancias o líneas base.

4
La varianza a posteriori, se somete a la prueba chi-cuadrado para calificar la corrección del ajuste. Las elipses de error absolutas, una horizontal y dos verticales, referidas al sistema geodésico horizontal local centrado en cada estación, son una medida del error de posicionamiento puntual. Finalmente, en la sección 7 se presentan los ajustes libre y vinculado de “una red GPS real”, medida en el departamento Iglesia de la provincia de San Juan por investigadores de la UNLP. Los datos se procesaron con la aplicación MATLAB, REDGPS_ALV, desarrollada en base a los algoritmos y métodos de las secciones anteriores. En la sección 8 se muestran los aspectos fundamentales del diseño satisfactorio de redes GPS, mediante el método “prueba y error” asistido por computadora. El procedimiento del diseño satisfactorio, se lleva a cabo con la aplicación MATLAB, REDGPS_DNC1, desarrollada a tal efecto. En la sección 9, Anexo, se muestra el listado de las aplicaciones MATLAB utilizadas. Los profesionales de la agrimensura podrían, tal vez, usar esta publicación como una introducción al ajuste de redes GPS; mientras que los docentes y alumnos de la carrera ingeniería en agrimensura, encuentren quizás una fuente de motivación y consulta en estas páginas. Es la pretensión de este trabajo. Raúl Márquez 2008

5
1.- Sistemas de Ecuaciones Lineales Inconsistentes Consideremos un sistema de n ecuaciones lineales con m incógnitas: a11 x1 + a12 x2 +…+ a1m xm = l1 a21 x1 + a22 x2 +... + a2m xm = l2 (1.1) ………………………………… an1 x1 + an2 x2 +…+ anm xm = ln
expresado matricialmente es AX = L; es decir:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
nmnmnn
m
m
l
ll
x
xx
aaa
aaaaaa
MM2
1
2
1
21
22221
11211
...............
...
...
(2.1)
La matriz A puede considerarse como un operador lineal que representa a la transformación lineal T:U V que aplica el espacio vectorial U en el espacio vectorial V. Puesto que A representa a T en la base usual o canónica, la transformación T puede expresarse por A: R m R n donde R es el cuerpo de los números reales y U ≡ R m, V ε R n. El núcleo de T se define por: NUT = {X ε R m / AX = 0} Vale decir que NUT contiene a todas las soluciones del sistema lineal homogéneo asociado: AX = 0 (3.1) La imagen de la transformación lineal T es el conjunto de todas las imágenes de los vectores X de R m : IMT = V = {Y ε R n / AX = Y para todo X ε R m} Sea X ε R m, entonces: X = x1 e1 + x2 e2 +…+ xm em (4.1) donde xj son las componentes del vector X en la base usual ej = {0, …,1, …. 0} para j =1, m de R m. El transformado de X es entonces:
∑=
==m
jjj LAexAX
1 (5.1)

6
Aej =
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
nj
ij
j
j
nmnjnn
imijii
mj
mj
a
a
aa
aaaa
aaaa
aaaaaaaa
M
M
M
M
2
1
21
21
222221
111211
0
1
00
........................
........................
......
......
= A(j) (6.1)
donde A(j) es la j-ésima columna de la matriz A. El transformado de X es entonces:
T(X) = AX = ∑=
=m
j
jj LAx
1
)( (7.1)
Las columnas de A generan la imagen de T, a la que denominamos el “espacio columna de A” y denotamos por ECA, tenemos entonces: IMT = ECA = V. Se define el rango de T como la dimensión de su imagen y la nulidad de T como la dimensión del núcleo, denotados por: r = rango de T = R(A) = dim (IMT) d = nulidad de T = dim (NUT) Del teorema de la dimensión: m = R(A) + dim (NUT) = r + d (8.1) Se tiene entonces que la dimensión del espacio solución del sistema homogéneo asociado (3.1) es d = m – r, donde m es el número de incógnitas y r es el rango de la matriz A. Si dim (NUT) = 0 entonces m = R(A) y el sistema lineal (1.1) admite solución única y la matriz A es de rango completo. Si, en cambio, dim (NUT) > 0, resulta R(A) < m y el sistema lineal (1.1) tiene infinitas soluciones. En este caso la matriz A es deficiente de rango. El defecto de rango, denotado por d, es d = m - R(A); es decir, igual a la dimensión del núcleo de la transformación lineal T. Sea XNU el conjunto de todas las soluciones del sistema lineal homogéneo asociado (3.1) y sea F una solución particular del sistema lineal (1.1), entonces: A XNU = 0 (9.1) A F = L (10.1) Sumando miembro a miembro (9.1) y (10.1): A (XNU + F) = L (11.1) La solución general del sistema lineal (1.1) es: X = F + XNU (12.1)

7
Resulta evidente que si la dimensión del núcleo de T es cero, la única solución del sistema lineal homogéneo asociado (3.1) es el vector nulo, XNU = 0, y la solución del sistema lineal (1.1), X = F, es también única. Ejemplo 1.1: Resolver el siguiente sistema de ecuaciones lineales A X = L:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
421
325
102110010010101110012012
4
3
2
1
xxxx
Resolución: El rango de A es r = R(A) = 2 puesto que la primera y cuarta columnas son iguales y la tercera es el vector nulo; existen pues sólo dos columnas linealmente independientes. Hallaremos la solución general aplicando la eliminación gaussiana a la matriz ampliada con el vector de términos independientes como ultima columna:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
410212100110010
310112100152012
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−
−−
2/3002/302/1002/10
100102/1002/102/1002/10
52012
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−
−−
3003010010
100101001010010
52012
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡−−
0000000000000000000010010
52012
La matriz triangularizada tiene sólo dos filas no nulas; se confirma que el rango de A es 2. El sistema triangular equivalente es: 2 x1 + x2 + 2x4 = 5 -x2 = -1 Seleccionando a x3, x4 como variables libres y resolviendo por sustitución regresiva: x2 = 1, x1 = 2 – x4, x3 = x3, x4 = x4 La solución general del sistema lineal A X = L es:

8
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ −
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
1001
0100
0012
12
43
4
3
4
4
3
2
1
xx
xx
x
xxxx
es decir: X = F + x3 N1 + x4 N2 Una solución particular del sistema lineal AX = b es F = [2, 1, 0, 0] T La solución general del sistema lineal homogéneo asociado A X = 0 es: XNU = x3 N1 + x4 N2, - ∞ < x3, x4 < +∞. Una base para el espacio nulo es:
{ }
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
1001
,
0100
, 21 NN dim (NUT ) = d = 2
Una base para la imagen de T, está formada por los vectores columnas independientes:
{ })2()1( , AA =
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
201
101
,
110112
dim (IMT) = r = R(A) = 2
El sistema lineal (1.1) puede expresarse por:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
++
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
nnm
m
m
m
nn l
ll
a
aa
x
a
aa
x
a
aa
xMMMM2
1
2
1
2
22
12
2
1
21
11
1 ... (13.1)
En virtud de (7.1), la (13.1) establece que el sistema lineal (1.1) tiene solución si y sólo si el vector L puede expresarse como una combinación lineal de las columnas A(j) de la matriz A, con escalares xj para j = 1, m. Si tal combinación lineal no existe (porque no existen los escalares xj), el vector de términos independientes L no pertenece al espacio columna, ECA, de la matriz A. El sistema lineal se dice entonces, inconsistente; es decir, no admite solución. No obstante, es posible hallar una solución sumando al vector L un vector V (vector corrección o vector error) tal que:

9
AX = L + V (14.1) Si escogemos V de tal manera que AX sea la proyección ortogonal de L sobre el ECA, V es un vector de longitud mínima; es decir:
∑=
===n
ii
T mínimovVVV1
22 (15.1)
cuando y solamente cuando V sea perpendicular a ECA. La (15.1) es el conocido principio de los mínimos cuadrados de Gauss. Sea X ≠ 0 el vector solución mínimos cuadrados del sistema lineal (14.1). Si AX es perpendicular a V, se tiene que el producto escalar es cero: (AX)TV = 0 (16.1) De la (14.1) V = AX – L, reemplazando en (16.1): XTAT (AX –L) = 0 XT (ATA X – AT L) = 0 Puesto que X ≠ 0, necesariamente debe cumplirse: ATA X – AT L = 0 es decir: ATA X = AT L (17.1) La (17.1) es el sistema de las ecuaciones normales, donde la matriz normal N = ATA es simétrica de orden m x m (NT = N). La solución mínimos cuadrados es: X = N-1 AT L (18.1) y será única si y sólo si el determinante de la matriz normal es distinto de cero. La inversa de N es:
N
NadjN )(1 =− (19.1)
donde adj (N) es la matriz cofactor transpuesta. La (19.1) es válida solamente cuando N es no singular. Para que el sistema lineal inconsistente tenga solución mínimos cuadrados única, deberá cumplirse las siguientes condiciones equivalentes:
i) Las columnas de A son linealmente independientes. ii) El espacio nulo de A contiene sólo al vector nulo; es decir dim (NUA) = 0.

10
iii) La matriz A es de rango completo; es decir R(A) = m iv) La matriz normal es no singular; es decir det (ATA) ≠ 0.
Si estas condiciones no se cumplen, el sistema de las ecuaciones normales (17.1) admitirá infinitas soluciones mínimos cuadrados, de entre las cuales deberá seleccionarse sólo una denominada la “solución óptima “. Consideremos el sistema lineal homogéneo asociado AX = 0. El espacio solución puede interpretarse de tres maneras:
i) El espacio solución consta de aquellos vectores X que dan soluciones lineales:
x1 A(1) + x2
A(2) + … + xm A(m) = 0 (20.1) donde A(j) es la j- ésima columna de la matriz A. ii) Las soluciones forman el complemento ortogonal del espacio fila, EFA, de la
matriz A. En efecto, la i-ésima ecuación del sistema lineal homogéneo asociado AX = 0, puede expresarse por:
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
m
imiii
x
xx
aaaXAM2
1
21 ...,, = 0 (21.1)
donde la fila i-ésima de la matriz A, Ai = [ai1, ai2, …, aim] , resulta perpendicular a todo X perteneciente al espacio nulo de A, solución de A X = 0. iii) Las soluciones de AX = 0, forman el núcleo o espacio nulo de la
transformación lineal T, representada por la matriz A en la base usual o canónica; es decir:
Núcleo de T = NUT = Espacio nulo de A = }{ 0/ =AXX
Hemos visto hasta ahora que si A es una matriz de orden n x m, sus columnas A(j) para j = m generan un subespacio vectorial denominado el espacio columna de A (ECA), que es la imagen de la transformación lineal T representada por la matriz A en la base usual. Es decir, ECA ≡ IMT ≡ V. La dimensión de la imagen de T se conoce como el rango de A por columnas. Las filas de la matriz A, Ai para i = 1, n, generan un subespacio vectorial denominado el espacio fila de A (EFA), cuya dimensión se conoce como el rango por filas de A. El rango por filas es el máximo número de filas linealmente independientes en A. El rango por filas y el rango por columnas son iguales al rango de A, entonces el rango de A es el máximo número de líneas (filas o columnas) independientes en la matriz A. Sea ahora un sistema lineal inconsistente A X = L donde la matriz A es de orden n x m defectuosa de rango; es decir, r = R(A) < m. El sistema de las ecuaciones normales (17.1) admite también infinitas soluciones mínimos cuadrados, puesto que el rango de la matriz normal N de orden m x m, es igual al rango de la matriz A (R(N) = R(A)).

11
Dado que la matriz normal es simétrica (NT = N), sus espacios fila y columnas son coincidentes (ECN ≡ EFN). El espacio fila de N y el espacio nulo de N son complementos ortogonales: Rm = EFN + NUN (22.1) donde el signo + es la suma vectorial. Según el teorema de la dimensión: m = R(N) + dim (NUN) (23.1) El espacio fila de N contiene todos los vectores ortogonales al espacio nulo de N y viceversa. Si ambos son subespacios de otro espacio de mayor dimensión (Rm), cualquier vector de Rm puede descomponerse en forma única, en dos componentes ortogonales pertenecientes a los respectivos complementos ortogonales. Puesto que la matriz normal N es deficiente de rango, existen infinitas soluciones mínimos cuadrados: X = F + XNU (24.1) donde F es una solución particular y XNU representa a todos los vectores del espacio nulo de N. Puesto que (24.1) debe satisfacer el sistema de las ecuaciones normales (17.1), se tiene: N (F + XNU) = ATL N F + N XNU = ATL N F = ATL (25.1) El vector fijo F (solución particular) pertenece a Rm y puede descomponerse en los complementos ortogonales EFN y NUN: F = XF +XNU (26.1) donde XF está en EFA y XNU pertenece a NUN. Multiplicando a izquierda ambos miembros de (26.1) por la matriz normal N: N F = N XF + N XNU = AT L N XNU = 0 puesto que XNU representa a todos los vectores del espacio nulo de N. Entonces: N XF = AT L (27.1) La (27.1) muestra que XF es una solución del sistema (17.1) de las ecuaciones normales; es decir también es una solución mínimos cuadrados. El vector XF, proyección ortogonal de F sobre el espacio fila de N, es la solución óptima puesto que es la solución mínimos cuadrados de longitud o norma mínima. En efecto, la longitud de la solución particular F obedece a la ley de Pitágoras, ya que las dos componentes son ortogonales:

12
222NUFNUF XXXX +=+ (28.1)
La solución que tiene longitud mínima es XF. Deberíamos elegir como cero a la componente en el espacio nulo, dejando una solución situada completamente en el espacio fila de la matriz normal N. La solución óptima XF, cumple la doble condición: i) mínimos cuadrados: VTV = mínimo ii) mínima norma : XF
T XF = mínimo Además, XF es única.
Según el teorema de la dimensión, si R(N) < m existen d = m – R(N) vectores linealmente independientes N1, N2,…, Nd que generan al espacio nulo de la matriz normal N, tales que la proyección del vector fijo F sobre el espacio fila de N, está dada por: XF = F + ν1 N1 + ν2 N2 +… +νd Nd (29.1) donde ν1, ν2, …,νm son escalares a determinar. Multiplicando escalarmente (29.1) por Ni
T, i = 1, m: (N1
TN1) ν 1 + (N1TN2) ν 2 +…+ (N1
TNd) ν d = - N1TF
(N2TN1) ν 1 + (N2
TN2) ν 2 +…+ (N2TNd) ν d = - N2
TF (30.1) ………………………………………………….. (Nd
TN1) ν 1 + (NdTN2) ν 2 +…+ (Nd
TNd) ν d = - NdTF
puesto que Ni
T XF = 0 para i = 1, 2,…, d La (30.1) representa un sistema de d ecuaciones lineales independientes con d incógnitas. La solución del sistema ν1, ν2,…,νd es única y reemplazada en (29.1) permite hallar la solución óptima del sistema lineal inconsistente A X = L. Ejemplo 2.1: Hallar la solución óptima del siguiente sistema lineal inconsistente:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
512
316
102110010010101110012012
4
3
2
1
xxxx
Aplicamos la eliminación gaussiana a la matriz A ampliada con el vector de términos independientes L:

13
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
510211100120010
310111100162012
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−
−−
2002/302002/1020010
0002/102002/10
62012
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−
−−
400304001020010
0001040010
62012
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−−
8000000000200004000040010
62012
Las filas 3º a 6º de la matriz ampliada son dependientes, pero cualquiera de ellas es independiente de las 1º y 2º, entonces el rango de la matriz ampliada es igual a 3. Puesto que el rango de A es 2, el vector L = [6, 1, 3, -2, 1, 5]T no pertenece al espacio columna de A; luego, el sistema lineal dado es inconsistente. El sistema de las ecuaciones normales (ATA) X = AT L es:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
2202122
8058000050758058
4
3
2
1
xxxx
donde R(A) = R(ATA) = 2 existen infinitas soluciones mínimos cuadrados.. Aplicamos la eliminación gaussiana para hallar la solución mínimos cuadrados general:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
2202122
8058000050758058
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
0025.7
22
00000875.38058
El sistema triangular equivalente es: 8x1 + 5x2 + 8x4 = 22 3.875x2 = 7.25 Adoptamos x3, x4 como variables libres: x1 = 1.58064 – x4 x2 = 1.87097

14
La solución general mínimos cuadrados es:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ −
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
1001
0100
00
87097.158064.1
87097.158064.1
43
4
3
4
4
3
2
1
xx
xx
x
xxxx
donde F = [1.58064, 1.87097, 0,0]T, N1 = [0,0,1,0]T, N2 = [-1,0,0,1]T Claramente se ve que (ATA) N1 = 0, (ATA) N2 = 0 y (ATA) F= ATL La proyección ortogonal del vector F sobre el espacio fila de N se determina estableciendo las siguientes condiciones: i) XF = F + ν1 N1 + ν2 N2 ii) N1
TF = 0 iii) N2
TF = 0 De las anteriores, se tiene: (N1
TN1) ν 1 + (N1TN2) ν 2 = - N1
TF (N2
TN1) ν 1 + (N2TN2) ν 2 = - N2
TF N1
TN1 = 1; N1TN2 = N2
TN1 = 0; N2TN2 = 2; N1
TF = 0; N2TF = -1.58064
El sistema de ecuaciones es: ν1 + 0 ν2 = 0 0 ν1 + 2 ν2 = 1.58064 La solución es: ν1 = 0 y ν2 = 0.79032. De la condición i), la solución óptima del sistema lineal inconsistente, es:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
+
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
79032.000000.087097.179032.0
1001
79032.0
00
87097.158064.1
FX mínimoXXX T === 1795.2
El vector corrección V = A X-L es:

15
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡−
=
3226.05806.01290.04516.05806.09678.0
V mínimoVVV T === 3912.1
Cualquier par de escalares distintos de ν1 = 0 y ν2 = 0.79032 reemplazados en la condición i), dará una solución mínimos cuadrados cuya longitud será mayor que la longitud de XF. Este método, si bien tiene valor teórico, no resulta práctico para resolver sistemas lineales inconsistentes de tamaño considerable. La solución óptima se halla mediante la aplicación de una “regla práctica” que se verá mas adelante. 2.- Valores Propios y Vectores Propios Dada una matriz cuadrada A de orden m x m, se define como un valor propio de A al escalar λ y su correspondiente vector propio al vector X, si se cumple que: A X = λ X (1.2) De la (1.2): A X – λ I X = 0 (A – λ I) X = 0 (2.2) La (2.2) es un sistema de ecuaciones lineales homogéneo que admite soluciones distintas de la trivial (X = 0), cuando la matriz A – λ I es singular; es decir: det (A – λ I) = 0 (3.2) La (3.2) es la ecuación característica y es un polinomio de grado m en λ, cuyas raíces son los valores propios de la matriz A. Para hallar los vectores propios correspondientes, debe resolverse el sistema homogéneo (2.2) para cada raíz de (3.2). La solución del sistema homogéneo (2.2) es un subespacio vectorial de R m, cuya base es el o los vectores propios asociados con el valor propio correspondiente. Ejemplo 1.2: Hallar los valores propios y vectores propios de la siguiente matriz A:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
−=
210121
012A
El polinomio característico 0=− IA λ : 04106 23 =−+− λλλ

16
Valores propios: 22,2,22 321 −==+= λλλ Vectores propios: Para el valor propio: 221 +=λ , el sistema homogéneo es:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−
−−
000
210121
012
3
2
1
xxx
El sistema triangular equivalente: 02 21 =−− xx
02
132 =−− xx
Tomando a x3 como variable libre: 32 2xx −= , x1 = x3 La solución general del sistema homogéneo es:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
12
12 3
3
3
3
3
2
1
xxxx
xxx
para -∞ < x3 < +∞
Para x3 = 1 se tiene el siguiente vector propio correspondiente al valor propio λ1:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
12
1
1X
El vector propio X1, genera el espacio al que pertenecen todos los vectores propios correspondientes a λ1. Procediendo en forma análoga se hallan los vectores propios:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
101
2X y ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
12
1
3X
correspondientes a los valores propio λ2 y λ3, respectivamente. Interesa especialmente el caso de las matrices simétricas, AT = A, para las cuales valen las siguientes propiedades: i) Los vectores propios de A son mutuamente ortogonales

17
ii) Los valores propios de A son mayores o iguales a cero. iii) El número de valores propios nulos es igual al defecto de rango de la matriz
A. iv) Puede haber soluciones múltiples en la ecuación característica. v) El determinante de la matriz A, es igual al producto de los valores propios. Interesan también las siguientes definiciones: - Una matriz simétrica se dice positivamente definida cuando todos sus valores
propios son distintos de cero. - Una matriz simétrica se dice positivamente semidefinida cuando no todos sus
valores propios son distintos de cero. Probaremos algunas de estas propiedades: Propiedad i): Sea A simétrica de orden m x m y λi, λj dos valores propios distintos con sus respectivos vectores propios Xi, Xj. Por hipótesis: A Xi = λi Xi (4.2) Transponiendo ambos miembros de (4.2): Xi
T AT = λi XiT
Multiplicando escalarmente por Xj ambos miembros a derecha: Xi
TAT Xj = λi XiT Xj
Puesto que A es simétrica y Xj es un vector propio correspondiente al valor propio λj: Xi
T λj Xj = λi XiT Xj
λj Xi
T Xj = λi XiT Xj
λj Xi
T Xj - λi XiT Xj = 0
(λj - λi) Xi
T Xj = 0 Puesto que los valores propios son distintos (λi ≠ λj), debe cumplirse que Xi
T Xj = 0; es decir, Xi y Xj son ortogonales para i ≠ j. Propiedad ii) Si A es una matriz simétrica de orden m x m, podemos expresarla como A = BTB donde B es una matriz de orden n x m. Sea λj un valor propio de A y Xj un vector propio correspondiente: A Xj = λj Xj BTB Xj = λj Xj Premultiplicando ambos miembros por Xj
T

18
XjT
BTB Xj = λj XjT Xj
(BXj)T BXj = λj Xj
T Xj
22
jjj XBX λ= (5.2) entonces:
mjX
BX
j
jj ,...,1,0
2
=≥⎟⎟
⎠
⎞
⎜⎜
⎝
⎛=λ (6.2)
Propiedad iii): Toda matriz A simétrica de orden m x m, puede factorizarse como A =BTB donde B es una matriz de orden n x m. Un valor propio de A es nulo si y sólo si BXj = 0; en efecto: A Xj = BTB Xj = BT (BXj) = λj Xj Si BXj = 0 λj Xj = 0 λj = 0 puesto que Xj ≠ 0 Si λj = 0 λj Xj = 0 BXj = 0 puesto que B ≠ 0 El conjunto de los Xj que hacen BXj = 0 es el espacio nulo de la matriz B y tiene dimensión d = m – R (B); es decir; existen d vectores propios independientes que lo generan. Si el rango de B (también el rango de A = BTB) es igual a m, la dimensión del espacio nulo de B es cero (la dimensión del espacio nulo de A también es cero por ser iguales los espacios nulos de A y B). Luego no existen valores propios nulos y la matriz A (también B) es de rango completo. El número de valores propios de A es entonces igual al defecto de rango de la matriz A: d = m - R.(A). 3.- Forma Diagonal de una Matriz Simétrica bajo Equivalencia Ortogonal Según la propiedad i) de la sección 2, si A es una matriz simétrica de orden m x m sus vectores propios son ortogonales: Xi
T Xj = 0 para i ≠ j. Denotamos por qj a los vectores propios normalizados (Forsythe G. y Moler C, 1973):
j
jj X
Xq = para j = 1,…,m (1.3)
Se tiene así, un conjunto ortonormal de vectores propios normalizados:
q iTq j = ⎭⎬⎫
⎩⎨⎧
=≠
jisiijisii
10
(2.3)
que son las columnas de la matriz Q: Q = [q1, q2,…, qm] (3.3)

19
La matriz Q es ortogonal en virtud de la (2.3), entonces: Q-1 = QT
(4.3) El producto AQ se expresa por: AQ = A [q1, q2,…, qm] = [Aq1, Aq2,…, Aqm] = [λ1q1, λ2q2,…, λmqm]
[ ] =
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
m
mqqqAQ
λ
λλ
O2
1
21 ... ΛQ
AQ = Q Λ (5.3) donde Λ es una matriz diagonal de orden m x m, cuyos elementos diagonales son los valores propios de la matriz simétrica A, generalmente ordenados de mayor a menor: λ1 ≥ λ2 ≥…≥ λm ≥ 0 Multiplicando ambos miembros de (5.3) por QT a derecha y teniendo en cuenta que Q es ortogonal, la matriz simétrica A se factoriza como: A = Q Λ QT (6.3) Considérese la matriz simétrica A como representando a una transformación lineal de un espacio m_dimensional X en un segundo espacio Y. Así, y = A X está en Y para cualquier x en X. Al representar la transformación lineal mediante una matriz A, se suponen determinados sistemas ortogonales tanto en X como en Y. La transformación Ax = y, puede expresarse ahora: Q Λ QT x = y (7.3) Λ QT x = QTy (8.3) Mediante un cambio ortogonal de coordenadas en X: QT x = x’ (9.3) y en Y: QT y = y’ (10.3) La (8.3) es ahora: Λ x’ = y’ (11.3) En los sistemas ortogonales nuevos, la transformación (11.3) tiene una representación muy sencilla. En términos de componentes, se tiene:

20
y1’ = λ1 x1’ y2’ = λ2 x2’ …………. (12.3) ym’ = λm xm’ Elevando al cuadrado y sumando miembro a miembro en (12.3), se tiene:
2
1
22
2
22
22
21
21 ''''
'...'' xxxx
yyy m
j
Tj
m
m ===+++ ∑=λλλ
(13.3)
Si x’ es tal que 1' =x , la (13.3) se transforma en:
1'
...''2
2
22
22
21
21 =+++
m
myyyλλλ
(14.3)
La (14.3) es la ecuación de un hiperelipsoide m-dimensional que es la transformación mediante Λ, de la esfera unitaria: }{ 1'/' == xS x (15.3) La matriz diagonal Λ representa a la transformación lineal en una base ortonormal que son sus vectores propios normalizados. Uno de los puntos del hiperelipsoide (14.3) mas alejados del origen 0 es el punto (λ1, 0, 0,…, 0) T y uno de los puntos más cercanos al origen es (0, 0,0,…, λm)T , donde λ1 = λmax y λm = λmin. Sea ahora el sistema lineal inconsistente AX = L, donde A es una matriz real de orden n x m, de rango completo; es decir, r = R (A) = m. El sistema de las ecuaciones normales (17.1) se expresa: NX = L’ (16.3) haciendo N =ATA y L’ = ATL. Un cambio δL’ en el segundo miembro de (16.3), produce un cambio δX en la solución de tal forma que: N(X + δX) = L’ + δL’ (17.3) X + δX = N-1L’ + N-1δL’ δX = N-1 δL’ (18.3) Según la definición de norma de un vector y sus propiedades: '1 LNX δδ −≤ (19.3) XNL ≤' (20.3)

21
Multiplicando miembro a miembro (19.3) y (20.3): XLNNLX '' 1 δδ −≤
''1
LL
NNXX δδ −≤ (21.3)
El error relativo del vector de términos independientes se amplifica por el factor
1−NN para obtener el error relativo de la solución. Se define. cond (N) = 1−NN (22.3) como el factor de amplificación y se denomina la condición de la matriz N. La norma de la matriz N, se define por:
0,max ≠= XX
NXN (23.3)
XX
XXX
XNλλ
)0max()0max( ≠=≠= (24.3)
1maxmax λλλ ===N (25.3) La matriz N se factoriza: N = Q Λ QT (26.3) Λ es una matriz diagonal cuyos elementos diagonales son los valores propios de N, mientras que Q es una matriz ortogonal cuyas columnas son los vectores propios de N, normalizados. El determinante de N, de la (26.3), es: det (N) = det (Q) det (Λ) det (QT) = λ1 λ2…λm (27.3) puesto que Q es ortogonal y su determinante es 1 o -1. Queda probada entonces la propiedad v) de la sección 2. De las (26.3) y (4.3): N-1 = (Q Λ QT) -1 = (Q Λ Q-1) -1 N-1 = Q Λ-1 QT (28.3) El determinante de la inversa de N, es:

22
det (N-1) = mλλλ
1...11
21
(29.3)
La norma de N-1 es:
m
Nλλλ111max
min
1 ===− (30.3)
El número de condición de la matriz normal N, es:
cond ( N) =m
NNλλ
λλ 1
min
max1 ==− (31.3)
Si la matriz normal N = ATA es positivamente definida, todos sus valores propios son mayores que cero, su rango es igual a m y la solución del sistema AX = L es única. De la (28.3), la solución mínimos cuadrados, es: X = Q Λ-1 QT ATL (32.3) y puede expresarse de la siguiente manera:
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
='
/1
/1/1
...,, 2
1
2
1
21
L
q
qqqX
Tm
T
T
m
mMO
λ
λλ
(33.3)
donde L’ = ATL; entonces:
)'(1...)'(1)'(122
211
1
LqqLqqLqqX Tmm
m
TT
λλλ+++= (34.3)
Pero qj
T L’ es la proyección ortogonal de L’ sobre el vector propio qj y qj(qjTL’)
es la componente de L’ en la dirección de qj.
j
m
j j
Tj q
LqX ∑
=
=1
'λ
(35.3)
Así, la solución X es una combinación lineal de la base ortonormal de R m formada por los valores propios de la matriz N normalizados. Las proyecciones individuales están ponderadas por los recíprocos de los valores propios de la matriz N. Si N es positivamente semidefinida, el rango N (también el rango de A), es menor que m y existen entonces d = m – R (A) valores propios nulos, resultando así N una matriz singular. Al reescribir (33.3), debe eliminarse de Λ los d valores propios nulos, puesto que la división por cero no está permitida. Al mismo tiempo deben removerse los vectores propios normalizados correspondientes, de las columnas de la matriz ortogonal Q y de las filas de QT.

23
La expresión (33.3) es ahora:
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
='
/1
/1/1
...,, 2
1
2
1
2,1
L
q
qqqX
Tr
T
T
r
rMO
λ
λλ
(36.3)
Así:
r
Tr
TT
qrLqqLqqLqX
λλλ'...''
22
21
1
1 +++= (37.3)
La solución resulta pues, una combinación lineal de los q1, q2,…, qr vectores propios normalizados que son una base ortonormal del espacio fila, EFN, de la matriz normal N, cuya dimensión es r = R (A) = R (N) = m – d. Los valores propios se presentan en orden descendente: λ1 ≥ λ2 ≥ …≥ λr ≥ λr+1 = λ r+2 =… = λ r+d = 0 La solución X, mínimos cuadrados, dada por la (37.3) pertenece al espacio fila de la matriz normal, por tanto su norma es mínima. En consecuencia: X = Q Λ-1 QT ATL es la solución óptima mínimos cuadrados y mínima norma y la (32.3) es la ”regla práctica” antes mencionada. Vale la pena mencionar que la matriz N-1 = Q Λ-1 QT cumple con las siguientes condiciones:
i) N N-1 N = N ii) N-1 N N-1 = N-1 iii) (N N-1)T = N N-1 (38.3) iv) (N-1 N)T = N-1 N Prueba: i): N N-1 N = Q Λ QT Q Λ-1 QT Q Λ QT = Q ΛΛ-1 Λ QT = Q Λ QT = N ii): N-1 N N-1 = Q Λ-1 QT Q Λ QT Q Λ-1 QT = Q Λ-1ΛΛ-1 QT = Q Λ-1 QT = N-1 iii): (N N-1)T = (Q Λ QT Q Λ-1 QT )T = (Q ΛΛ-1QT)T= (Q QT)T = Q QT = N N-1 iv): (N-1 N)T = (Q Λ-1 QT Q Λ QT )T = (Q Λ-1ΛQT)T = (Q QT)T = Q QT = N-1 N La matriz N-1 = Q Λ-1 QT es la pseudoinversa de Moore-Penrose y se denota por: N+ = Q Λ-1 QT (39.3)

24
Hallar la solución óptima del siguiente sistema lineal inconsistente mediante la pseudoinversa de Moore-Penrose:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
512
316
102110010010101110012012
4
3
2
1
xxxx
La matriz normal N = ATA y el vector de términos independientes ATL:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
==
8058000050758058
AAN T ;
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
2202122
LAT
La ecuación característica:
06223
805800050758058
234 =+−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−−
=− λλλ
λλ
λλ
λIN
Los valores propios: λ1 = 19.88153; λ2 = 3.11847; λ3 = 0; λ4 = 0 Vectores propios: λ1 = 19.88153. Aplicamos la eliminación gaussiana para resolver el sistema homogéneo correspondiente: (N –λ1) X = 0
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−−
088153.110580088153.190005088153.125080588153.11

25
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−−
049502.6036657.800088153.1900036657.8077742.100080588153.11
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−
000000088153.1900036657.8077742.100080588153.11
El sistema triangular equivalente: -11.88153 x1 + 5 x2 + 8 x4 = 0 -10.77742 x2 + 8.36657 x4 = 0 -19.88153 x3 = 0 Adoptamos x4 como la variable libre: x3 = 0; x2 = 0.77630 x4; x1 = x4 La solución general del sistema homogéneo:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
10
77630.01
077630.0
4
4
4
4
4
3
2
1
x
x
xx
xxxx
;
para x4 = 1, un vector propio es:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
10
77630.01
1X 61327.1111 == XXX T
El vector propio normalizado:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
==
61986.000000.048120.061986.0
1
11 X
Xq
Para el valor propio λ2 = 3.11847, se obtiene el vector propio normalizado q2:

26
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
34026.000000.087661.0
34026.0
2q
Las matrices Λ, Λ-1 y Q: Removiendo los valores propios nulos y los vectores propios correspondientes:
⎥⎦
⎤⎢⎣
⎡=Λ
11847.388153.19
; ⎥⎦
⎤⎢⎣
⎡=Λ−
32607.005030.01
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
34026.061986.000000.000000.087661.048120.0
34026.061986.0
Q
La matriz pseudoinversa N+ = Q Λ-1 QT:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−−
=+
05645.000000.008064.005645.000000.000000.000000.000000.008064.000000.025806.008064.0
05645.000000.008064.005645.0
N
La solución óptima X = Q Λ-1 QT ATL:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
79034.000000.087095.179034.0
X 17939.2== XXX T
El vector error V = AX – L:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡−
=
32258.058067.012905.045162.058067.096770.0
V 93541.1== VVV T
Varianza y error estándar de una componente del vector de términos independientes: La varianza estimada es:

27
48385.026
93541.1)(
ˆ 20 =
−=
ℜ−=
AnVV T
σ
El error estándar estimado es:
69651.0)(
ˆ 0 =ℜ−
=An
VV T
σ
La matriz varianza-covarianza del vector de incógnitas: La solución óptima es: X = Q Λ-1 QT AT L La matriz varianza-covarianza del vector de incógnitas X es según la ley general de la propagación de la varianza-covarianza: TTT
LTT
X AQQAQQ )()( 11 −− ΛΣΛ=Σ (40.3) La matriz varianza covarianza del vector L es:
IL2
0
20
20
20
ˆ
ˆ
ˆˆ
σ
σ
σσ
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=ΣO
(41.3)
donde se ha considerado que las componentes de L son estocásticamente no correlacionadas; es decir que sus covarianzas son nulas. Teniendo en cuenta las condiciones i)-iv) que debe cumplir la pseudoinversa de Moore-Penrose, la matriz varianza-covarianza del vector de incógnitas X, es: T
X QQ 120ˆ −Λ=Σ σ (42.3)
Entonces la matriz varianza- covarianza es:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
−
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=Σ
02731.000
03902.0012487.002731.0003902.002731.0
24
432
3
42322
2
4131212
1
simsim
X
xxxxxxxxxxxxxxxx
σσσσσσσσσσ
Varianzas y errores estándar de las incógnitas: σx1
2 = 0.02731 σx1 = 0.16526 σx32 = 0 σx3 = 0
σx2
2 = 0.12487 σx2 = 0.35337 σx42 = 0.02731 σx4 = 0.16526
Estimación de la norma de δL: 93541.1== VVL Tδ

28
La norma de L es: 7178.8== LLL T Estimación del error relativo del término independiente:
0420.07178.893541.1
==LLδ
Estimación de la norma de δX: TxxxxX ),,,( 4321 σσσσδ = XXX Tδδδ = = 4237.0179492.0 = La norma de X: 1794.2== XXX T Estimación del error relativo del vector solución:
1944.01794.24237.0
==XXδ
Condición de la matriz normal: cond (N) = 3754.611847.388153.19
min
max ==λλ
Debe cumplirse la (21.3):
LL
NcondXX δδ
)(≤ 0.1944 ≤ 6.3754 0.0420 = 0.2678
4.- Descomposición en Valores Singulares Toda matriz A de orden n x m y de rango r ≤ m, puede factorizarse mediante el uso de una matriz diagonal D y dos matrices ortogonales U y V: A = U D VT (1.4) donde UT U =VT V = Im y
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
m
D
µ
µµ
O2
1
µi : raíces positivas de los valores propios de la matriz ATA (valores singulares). Los valores singulares se ordenan de la siguiente manera:

29
µ1 ≥ µ2 ≥…≥ µr > µ r+1 = µ r+2 =…= µ m = 0 Prueba: Existe una matriz ortogonal V que satisface: VT (ATA) V = Λ (2.4) donde V = Q = [q1, q2, …, qm], qj para j = 1, 2, …, m son los vectores propios normalizados de ATA y Λ es una matriz diagonal, cuyos elementos diagonales son los valores propios de ATA.
Según la definición de valor singular: Λ = D2, entonces la (2.4) puede escribirse: VT (ATA) V = D2 (3.4) Sea: AV = F (4.4) FTF = (AV)TAV = VT ATA V = D2 (5.4) F = [f1, f2,…, fr, f r+1, f r+2,…, fm] Removiendo los vectores propios correspondientes a los valores singulares nulos, redefinimos F: F = [f1, f2,…, fr] (6.4) De (5.4) se ve que: fj
T fj = 22
jjf µ= (7.4) entonces: jjf µ= (8.4) Se define la matriz U de la siguiente manera:
⎥⎦
⎤⎢⎣
⎡=
r
rfffU
µµµ...
2
2
1
1 = F D-1 (9.4)
Así definida, U es una matriz ortogonal; en efecto: UTU = (FD-1)T F D-1 = D-1 FTF D-1 = D-1 D2 D-1= D-1 D D D-1 = Ir Ir = Ir UTU = Ir U es una matriz ortogonal. De la (9.4):

30
F = UD (10.4) Reemplazando (10.4) en (4.4): AV = UD (11.4) Multiplicando ambos miembros de (11.4) a derecha, por VT: A = U D VT Se tiene la (1.4), como se quería demostrar. La inversa de la matriz A es: A-1 = (U D VT)-1 = (VT)-1D-1U-1 = V D-1 UT A-1 = V D-1 UT (12.4) La (12.4), denotada por A+, cumple con las siguientes condiciones:
i) AA+A = A ii) A+AA+ = A+ (13.4) iii) (AA+)T =AA+ iv) (A+A)T = A+A
Según las (13.4), A+ = V D-1 UT, es la pseudoinversa de Moore – Penrose de la matriz A. Dado que V = Q y U = FD-1, reemplazando en la (12.4), la solución del sistema lineal inconsistente AX = L es: X = A+L = VD-1UT L = QD-1(FD-1)T L = QD-1D-1FT L Reemplazando por F = AV: X = Q D-1D-1(AV)T L = Q D-2 VTATL X = Q (D2)-1 VTATL = Q Λ-1 QT ATL X = Q Λ-1 QT ATL (14.4) La (14.4) es la solución óptima mínimos cuadrados, mínima norma que vimos en la sección 3. Ejemplo 1.4: Resolver el siguiente sistema lineal inconsistente AX=L por descomposición en valores singulares:

31
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
512
316
102110010010101110012012
4
3
2
1
xxxx
Valores propios de ATA: λ1 = 19.88153, λ2 = 3.11847, λ3 = 0, λ4 = 0 Valores singulares: µ1 = 4.45887, µ2 = 1.76592, µ3 = 0, µ4 = 0 Las matrices D y D-1 luego de remover los valores singulares nulos:
⎥⎦
⎤⎢⎣
⎡=
76592.145887.4
D ⎥⎦
⎤⎢⎣
⎡=−
56626.022427.01D
La matriz V, luego de remover los vectores propios correspondientes a los valores propios nulos:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
34026.006198600000.000000.087661.048120.0
34026.061986.0
V
La matriz F = AV:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
=
0727.12021.26805.02397.18766.04812.01961.07209.1
6805.02397.14844.09606.2
F
La matriz U = FD-1:

32
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
=
6074.04939.0854.02780.04964.01079.01110.02860.0
3854.02780.02743.06640.0
U
La pseudoinversa de Moore-Penrose: A+ = VD-1UT:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−−−−
=+
048398.0112903.0080645.0032258.0112903.0145161.0000000.0000000.0000000.0000000.0000000.0000000.0354839.0161290.0258064.00096774161290.0064516.0
48387.0112903.0080645.0032258.0112903.0145161.0
A
La solución óptima: X = A+L = VD-1UT L:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
790322.0000000.0870968.1790322.0
4
3
2
1
xxxx
X 1739.2== XXX T
El vector error: V = AX – L:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡−
=
3226.05806.01290.04516.05806.09677.0
V 93541.1== VVV T
Estimación de la varianza y del error estándar de las componentes de L:
4839.0)(
ˆ 20 =
ℜ−=
AnVV T
σ , 6956.0ˆ 0 =σ
La matriz varianza-covarianza del vector solución: Según la ley general de propagación de la varianza-covarianza aplicada a la expresión de la solución óptima X = A+L = VD-1UT L ΣX = A+ ΣL A+T = A+ σ0
2I A+T = σ02 A A+T = σ0
2 VD-1UT (VD-1UT)T ΣX = σ0
2 VD-1UTUD-1VT = σ02 VD-1D-1VT = σ0
2 VD-2VT = σ02 Q (D2)-1QT

33
ΣX = σ0
2 Q Λ-1 QT Esta expresión es la (42.3) de la sección anterior. 5.- Mínimos Cuadrados Ponderados Supóngase que se desea estimar el peso de un objeto en base a dos observaciones x = l1 y x = l2. A menos que estas observaciones sean idénticas, nos enfrentamos a un sistema inconsistente de dos ecuaciones con una incógnita: AX = L (Strang G., 1986):
[ ] ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
2
1
11
ll
X (1.5)
Supongamos que ambas observaciones son igualmente fidedignas y buscamos el valor x que minimice: V2 = (x – l1)2 + (x – l2)2 (2.5) La condición de mínimo es:
0)(2)(2 21
2
=−+−= lxlxdx
dV (3.5)
Entonces:
2
21 llx
+= (4.5)
La x óptima es la media aritmética de ambas observaciones. Supongamos ahora que las dos observaciones no son confiables en el mismo grado. El valor de x = l1 se obtuvo con un instrumento más preciso que el valor de x = l2; no obstante no estamos dispuestos a desechar la información contenida en la segunda observación. El camino más sencillo consiste en adjudicar diferentes pesos pi = wi
2 a las dos observaciones y elegir la Xw que minimice la suma ponderada de cuadrados: V2 = w1
2(x –l1)2 + w22 (x –l2)2 (5.5)
Si w1 > w2, entonces se adjudica más importancia a la primera observación. Para hallar la solución óptima x, hacemos:
[ ] 0)()(2 22
212
1
2
=−+−= lxwlxwdx
dV (6.5)
de donde:

34
22
21
22
212
1
wwlwlw
Xw+
+= (7.5)
En lugar de la media aritmética de l1 y l2, como cuando w1 = w2, Xw es un promedio ponderado de los datos. Este promedio está más cerca de l1 que de l2. Llamemos W a la matriz:
⎥⎦
⎤⎢⎣
⎡=
2
1
00
ww
W (8.5)
y multipliquemos ambos miembros a la izquierda de (1.5):
[ ] ⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
2
1
2
1
2
1
00
11
00
ll
ww
xw
w (9.5)
[ ] ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
22
11
2
1
lwlw
xww
(10.5)
Es decir: WLWAX = (11.5) La solución mínimos cuadrados es ahora: Xw = [(WA)T(WA)] -1 (WA)TWL Xw = [AT(WTW)A)] -1 AT(WT W) L (12.5) Si hacemos: P = WTW (13.2) se tiene: Xw = (ATPA)-1ATPL (14.5) donde:
⎥⎦
⎤⎢⎣
⎡= 2
2
21
00
wwP (15.5)
es la matriz de los pesos de las observaciones. Sea AX = L un sistema de ecuaciones lineales, donde A es una matriz real de orden n x m, R (A) ≤ m y L es el vector de los términos independientes de orden nx1. Las componentes de L son observaciones de iguales o distintos pesos. Los errores de observación que afectan las componentes de L, impiden a éste pertenecer al espacio

35
columna de la matriz A. En consecuencia, el sistema lineal en cuestión, resulta inconsistente. Supongamos que el vector L es una variable estocástica conjunta de dimensión n y σi son los errores o desvíos estándar de cada componente li. La matriz varianza covarianza de L es:
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=Σ
2
22
2
1122
1
...
...
nsim
n
n
L
σ
σσσσσ
MO (16.5)
Si las observaciones son no correlacionadas, las covarianzas son nulas (σij = 0, i ≠ j), entonces la (16.5) es:
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=Σ
2
22
21
n
L
σ
σσ
O (17.5)
El peso de cada observación se define por:
2
20
iip
σσ
= (18.5)
donde σ0 es el error estándar de una observación hipotética a la que se asigna peso 1, entonces:
i
i p
202 σ
σ = (19.5)
La (17.5) puede escribirse de la siguiente manera:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=Σ
n
L
p
pp
/1
/1/1
2
1
20 O
σ = σ02 P-1 (20.5)
Entonces la matriz de los pesos, es: P = σ0
2 ΣL-1 (21.5)
σ0
2 es la varianza poblacional estimada por la muestra de observaciones [l1, l2,…, ln]T. La estimación de σ0
2 está dada por:

36
)(
ˆ 20 An
PVV T
ℜ−=σ (22.5)
Una prueba de hipótesis y significación con la distribución chi-cuadrado, permite tomar la decisión de aceptar o rechazar que el valor de 2
0σ̂ está suficientemente cercano a 1 al nivel de confianza escogido. Hemos aceptado a priori, que la desviación estándar de la observación hipotética de peso 1, es igual a1. El sistema inconsistente AX = L, se denomina el sistema de las ecuaciones de observación. Las varianzas y covarianzas de las observaciones contenidas en el vector L, se propagan inevitablemente al vector de las incógnitas X. De la (14.5), la solución mínimos cuadrados es: X = (ATPA)-1ATPL X = (Q Λ-1QT ATP)L (23.5) La matriz varianza covarianza del vector X, es: ΣX = (Q Λ-1QT ATP) ΣL (Q Λ-1QT ATP)T = (Q Λ-1QT ATP) σ0
2 P-1(Q Λ-1QT ATP)T ΣX = σ0
2 Q Λ-1QT (ATP A)Q Λ-1QT = σ02 N+NN+ = σ0
2 N+ = σ02 Q Λ-1QT
donde ΣX = σ0
2 Q Λ-1QT es la (42.3) de la sección 3.
Ejemplo 1.5: Resolver el siguiente sistema lineal inconsistente:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
512
316
102110010010101110012012
4
3
2
1
xxxx
, R (A) = 2
con la matriz varianza- covarianza de los términos independientes:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=Σ
3.02.001.002.001.003.02.06.003.001.002.001.001.003.04.01.003.002.002.001.01.02.002.001.001.002.003.002.07.02.003.001.002.001.02.05.0
L

37
Las componentes (observaciones) l1 y l2, l3 y l4, l5 y l6 están moderadamente correlacionadas, mientras que l1 y l2 con l3, l4, l5, l6 y l3 y l4 con l5 y l6 están débilmente correlacionadas. Coeficientes de correlación:
Se definen como: ji
ijij σσ
σρ = (24.5)
Así: ρ1 2 = 0.34, ρ3 4 = 0.35, ρ5 6 = 0.47 correlaciones moderadas ρ1 3 = 0.02, ρ1 4 = 0.09, ρ1 5 = 0.02, ρ1 6 = 0.08 correlaciones débiles ρ2 3 = 0.05, ρ2 4 = 0.06, ρ2 5 = 0.03, ρ2 6 = 0.02 correlaciones débiles ρ3 5 = 0.03, ρ3 6 = 0.02, ρ4 6 = 0.06, ρ5 6 = 0.03 correlaciones débiles Valores propios de ΣL: λ1 = 0.83726, λ2 = 0.69529, λ3 = 0.20232, λ4 = 0.15390, λ5 = 0.37826, λ6 =0.43297 Todos los valores propios de ΣL son positivos, luego la matriz varianza – covarianza de las observaciones es positivamente definida y la matriz de los pesos también lo es. La matriz de los pesos: P = ΣL
-1:
P =
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−−−−
−−−
3429.44441.11545.2
1106.01536.08714.24106.04570.04312.17680.5
0579.00578.00607.01022.06194.12511.00750.06560.00052.06456.02744.2
sim
La matriz normal: N = ATPA
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
0095.1608563.140095.1600008563.1401962.288563.140095.1608563.140095.16
N , R (N) = 2
Los valores propios de N: λ1 = 51.204, λ2 = 9.0109, λ3 = 0, λ4 = 0. La matriz N es positivamente semidefinida (λ3 = 0, λ4 = 0), su determinante es cero. Es necesario remover los valores propios nulos de la matriz Λ y los vectores propios normalizados correspondientes de la matriz Q, para hallar la pseudoinversa N+.

38
Las matrices Λ y Λ-1 (se remueven los valores propios nulos):
⎥⎦
⎤⎢⎣
⎡=Λ
0109.900204.51
⎥⎦
⎤⎢⎣
⎡=Λ−
11098.00001953.01
La matriz Q (luego de remover los vectores propios normalizados correspondientes a los valores propios nulos):
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
=
4768.05222.000
7384.06743.04768.05222.0
Q
La matriz pseudoinversa: N+ = Q Λ-1 QT
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−−
=+
0306.000322.00306.000000322.000694.00322.0
0306.000322.00306.0
N
La solución óptima: X = Q Λ-1QTATPL
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
8369.00000.07757.18369.0
X 1340.2== XXX T
El vector error: V = AX – L
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡−
=
2252.06739.02243.04495.06739.08766.0
V 4070.1== VVV T
Estimación de la varianza:
2251.1)(
ˆ 20 =
ℜ−=
AnPVV T
σ
La prueba chi-cuadrado para la estimación de la varianza 2
0σ̂

39
Hipótesis Nula H0:
20
20ˆ σσ = = 1
Hipótesis Alternativa H1:
20
20ˆ σσ ≠ = 1
ν = n – R (A) = 6 – 2 = 4 (grados de libertad) χ2 ν, 0.025 = 0.488, χ2 ν, 0.975 = 11.1
025.0,2
20
975.0,2
20 ˆ
1ˆ
νν χσν
χσν
≤≤ 0.441 ≤ 1 ≤ 10.042 La varianza pasa la prueba χ2 al
95% de confianza. Podemos tomar la decisión de aceptar (o al menos no rechazar) la hipótesis de que la varianza poblacional, σ0
2, es igual a 1. La matriz varianza- covarianza del vector incógnita X: ΣX = TQQ 12
0ˆ −Λσ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
−
=Σ
0151.0000159.000343.0
0151.000159.00151.0
sim
X
Los errores estándar de las incógnitas: σx1 = 0.1230, σx2 =0.1853, σx3 = 0 σx4 =0.1230. Los coeficientes de correlación de las incógnitas: 6976.021 −=xxρ , 031 =xxρ
9981.041 =xxρ , 032 =xxρ , 6976.042 −=xxρ , 043 =xxρ . En el siguiente cálculo no consideraremos las correlaciones débiles. La matriz varianza-covarianza del vector L es ahora:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=Σ
3.02.000002.06.00000
004.01.000001.02.00000007.0.0200002.005
L
Los valores propios de la matriz covarianza: λ1 =0.3764, λ2 = 0.8263, λ3 = 0.1586 λ4 = 0.4414, λ5 = 0.7000, λ6 = 0.2000. Todos los valores propios son positivos, entonces ΣL es positivamente definida. La matriz de los pesos: P = ΣL
-1
40
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
=
2857.44286.14286.11429.2
8571.24286.14286.17143.5
6129.16452.06452.02581.2
P
La matriz normal: N = ATPA
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
3502.1707281.163502.1700007281.1608295.307281.163502.1707281.163502.17
N
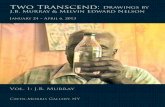
Los valores propios de N: λ1 = 56.5011, λ2 = 9.0288, λ3 = 0, λ4 = 0 La matriz N es positivamente semidefinida (λ3 = 0, λ4 = 0), su determinante es cero. Es necesario remover los valores propios nulos de la matriz Λ y los vectores propios normalizados correspondientes de la matriz Q, para hallar la pseudoinversa N+. Las matrices Λ y Λ-1:
⎥⎦
⎤⎢⎣
⎡=Λ
0288.9005011.56
⎥⎦
⎤⎢⎣
⎡=Λ−
1108.0000172.01
La matriz Q:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
=
4792.05200.00000.0000.07354.06777.04792.05200.0
Q
La matriz pseudoinversa: N+ = Q Λ-1 QT.
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−−
=+
0302.000328.00302.000000328.000680.00328.0
0302.000328.00302.0
N
La solución óptima: X = N+ATPL.

41
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
8198.00000.07995.18198.0
X 1406.2== XXX T
El vector error: V = AX – L
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡−
=
2385.06396.02005.04390.06396.09214.0
V 9570.1== VVV T
Estimación de la varianza:
2466.1
)(ˆ 2
0 =ℜ−
=An
PVV T
σ
Pasa la prueba chi-cuadrado al 95% de confianza. La matriz varianza-covarianza de las incógnitas: +=Σ NX
20σ̂
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−−
=Σ
0377.000409.00377.000000409.000848.00409.0
0377.000409.00377.0
X
Los errores estándar de las incógnitas: σx1 = 0.1941, σx2 = 0.2912, σx3 = 0, σx4 = 0.1941 En el siguiente cálculo no consideramos las correlaciones. La matriz varianza- covarianza es ahora:
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=Σ
3.06.0
4.02.0
7.05.0
L

42
Los valores propios son los elementos diagonales. La matriz ΣL es positivamente definida. La matriz de los pesos: P = ΣL -1.
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
3333.36667.1
5.25
4286.12
P
La matriz N = ATPA
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
4286.1906667.154286.1900006667.1508333.226667.154286.1906667.154286.19
N
Los valores propios de N: λ1 = 54.4405, λ2 = 7.2851, λ3 = 0, λ4 = 0. La matriz N es positivamente semidefinida (λ3 = 0, λ4 = 0), su determinante es cero. Es necesario remover los valores propios nulos de la matriz Λ y los vectores propios normalizados correspondientes de la matriz Q, para hallar la pseudoinversa N+. Las matrices Λ y Λ-1.:
⎥⎦
⎤⎢⎣
⎡=Λ
2851.7004405.54
⎥⎦
⎤⎢⎣
⎡=Λ−
1373.0000184.01
La matriz Q:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
=
4062.05788.00000.00000.08186.05744.04062.05788.0
Q
La matriz pseudoinversa: N+ = Q Λ-1 QT y la solución óptima: X = N+ATPL
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−−
=+
0288.000395.00288.000000395.000980.00395.0
0288.000395.00288.0
N ;
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
8028.00000.07597.18028.0
X

43
El vector de los residuos: V = AX – L
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡−
=
1249.06055.02403.03652.06055.00297.1
V
Estimación de la varianza:
0292.1)(
ˆ 20 =
ℜ−=
AnPVV T
σ
Pasa la prueba chi-cuadrado al 95% de confianza. La matriz varianza-covarianza de las incógnitas: +=Σ NX
20σ̂
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−−
=Σ
0296.000407.00296.000000407.001009.00407.0
0296.000407.00296.0
X
Los errores estándar de las incógnitas: σx1 = 0.1722, σx2 = 0.3177, σx3 = 0, σx4 = 0.1722 Este ejemplo muestra que tanto las incógnitas como sus errores estándar, cambian con la matriz varianza-covarianza de las componentes del vector L; es decir las observaciones. Ciertos problemas de ingeniería, el ajuste de redes GPS por ejemplo, requieren determinadas precisiones en las incógnitas. En consecuencia es necesario tener en cuenta las correlaciones entre las observaciones, cuando existen, a fin de modelar adecuadamente los errores de observación. 6.- Ajuste de Redes GPS
Los dos resultados inmediatos del procesamiento de la fase de la portadora son el vector entre estaciones, usualmente expresado en diferencias de coordenadas cartesianas WGS’84, y la matriz varianza-covarianza de orden 3x3, de las diferencias de coordenadas. Los resultados de un levantamiento GPS se obtienen de esta forma si el procesamiento de la fase se lleva a cabo vector a vector. Un vector GPS entre dos estaciones se denota por ∆ y está representado en WGS’84 por las diferencias de coordenadas o componentes:
∆ = [∆X, ∆Y, ∆Z]T (1.6)

44
La matriz varianza-covarianza del vector ∆ es:
Σ∆ = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
∆
∆∆∆
∆∆∆∆∆
2
2
2
Zsim
ZYY
ZXYXX
σσσσσσ
(2.6)
Un conjunto de nv vectores GPS que conectan p estaciones formando figuras cerradas, conforman una red espacial. Las figuras formadas no cierran debido a los inevitables errores de observación de las componentes; es decir:
Σ ∆X = εX ≠ 0 Σ ∆Y = εY ≠ 0 (3.6) Σ ∆Z = εZ ≠ 0
Si el error de cierre en cada figura: 222
ZYX εεεε ++= (4.6)
está por debajo de una cierta tolerancia, la red GPS podrá ser ajustada mediante algún algoritmo determinado. El modulo de un vector GPS o distancia entre estaciones es:
222
ZYX ∆+∆+∆=∆ (5.6)
y el error “estándar especificado” es: )()( mmppmba ∆+=∆σ (6.6)
La tolerancia de cierre para una figura espacial de nl lados, puede expresarse:
∑=
∆=nl
kkTol
1
2)(5.2 σ (7.6)
En una red GPS los parámetros a ajustar son las coordenadas cartesianas X, Y, Z de las estaciones, mientras que las observaciones son las componentes ∆X, ∆Y, ∆Z de los vectores medidos. Las distancias entre estaciones, que son invariantes respecto del sistema de coordenadas, pueden incluirse también como observaciones. En la red GPS existe una relación explícita entre observaciones y parámetros:
La = F (Xa) (8.6) La ≡ vector de observaciones ajustado, de dimensión n. Xa ≡ vector de parámetros ajustado, de dimensión m. F ≡ un conjunto de n funciones donde algunas pueden ser no lineales.

45
Sea n el número de observaciones y m el número de parámetros de la red. Así, una red GPS con p estaciones donde se han medido nv vectores, tiene m = 3p parámetros incógnitas y n = 4nv observaciones si se incluyen las distancias. El vector Xa se expresa: Xa = Xº + X (9.6) donde Xº es un vector de parámetros aproximados que son las coordenadas a priori de todas las estaciones de una red de referencia, de la cual se parte para llegar a la red ajustada, tras sucesivas iteraciones. Algunos centenares de metros son suficientes para lograr una buena convergencia a los valores definitivos. Las coordenadas absolutas a partir del procesamiento de las observaciones de código C/A cumplen holgadamente con estas exigencias. El vector X es un vector de correcciones diferenciales a los parámetros aproximados. Asimismo: La = Lb + V (10.6) Lb es el vector de las observaciones y V es el vector de las correcciones o residuos. Reemplazando (9.6) y (10.6) en la (8.6): F (Xº + X) = Lb + V (11.6) Desarrollando (11.6) en serie de Taylor:
VLXXFXF b +=⎟
⎠⎞
⎜⎝⎛
∂∂
+0
)º( (12.6)
VXFLXXF
b +−=⎟⎠⎞
⎜⎝⎛
∂∂ )º(
0
(13.6)
Haciendo L = Lb – F(Xº) y reemplazando en (13.6):
VLXXF
+=⎟⎠⎞
⎜⎝⎛
∂∂
0
(14.6)
La derivada parcial de F respecto de X, evaluada en los parámetros aproximados, se denota por A y se la denomina la matriz de diseño. La (14.6) puede escribirse ahora: A X = L + V (15.6) La (15.6) es la expresión matricial del sistema de las ecuaciones de observación y tiene dos incógnitas, los vectores X y V. El sistema lineal A X = L es inconsistente debido a que en las componentes del vector L, están las observaciones afectadas de sus propios errores. El problema se resuelve minimizando la cantidad:
∑=
=n
iii
T vpPVV1
2 (16.6)

46
donde P es la matriz de los pesos (21.5). Si las observaciones son solamente las componentes de los vectores GPS medidos, la matriz varianza-covarianza de la red, es diagonal por bloques de orden 3 x 3. Así, el orden de la matriz ΣL (y también de la matriz P) es 3nv x 3nv.
De la (15.6): V = A X – L (17.6) Reemplazando (17.6) en (16.6): )()()( LAXPLAXX T −−=Φ ))(()( PLPAXLAXX TTT −−=Φ PLLPAXLPLAXPAXAXX TTTTTT +−−=Φ )( La diferencial total de )(XΦ , teniendo en cuenta la diferenciación de formas cuadráticas y la simetría de la matriz ATPA, es: dXPALPAAXXd TTT )22()( −=Φ (18.6) La condición de mínimo para la función )(XΦ , es:
=ΦdX
Xd )( 0 (19.6)
De la (18.6):
=−=Φ PALPAAXdX
Xd TTT 22)( 0 (20.6)
XTATPA = LTPA (21.6) Transponiendo ambos miembros de (21.6): ATPA X = ATPL (22.6) La (22.6) es el sistema de las ecuaciones normales en un problema de mínimos cuadrados ponderados, cuya solución es: X = (ATPA)-1ATPL (23.6) Reemplazando (23.6) en (17.6) se obtienen las correcciones a las observaciones. Reemplazando V en (10.6) se tiene el vector de las observaciones ajustadas La.
Los vectores Xa y La satisfacen la relación explícita entre observaciones y parámetros.
Un vector espacial presenta seis grados de libertad manifestados por la orientación, la escala y tres desplazamientos respecto del origen de coordenadas en la dirección de los tres ejes coordenados. Así, para un vector GPS, ∆ = [∆X, ∆Y, ∆Z]T, se tiene:

47
orientación: rumbo ψ y elevación θ:
XYarctg
∆∆
=ψ , 22 YX
Zarctg∆+∆
∆=θ (24.6)
La escala queda determinada por la distancia entre estaciones: 222 ZYX ∆+∆+∆=∆ Los vectores GPS fijan tres grados de libertad, orientación (rumbo y elevación) y escala, mientras que quedan libres los tres desplazamientos respecto del origen según los ejes coordenados. Si una red GPS se ajusta sin estar vinculada a punto fijo alguno (constreñimiento externo), se dice libre o no constreñida. Si, en cambio, se ajusta vinculada a sólo un punto fijo, se dice fija mínimamente constreñida y si se la ajusta ligada a dos o más puntos fijos, se dice fija sobre constreñida. La matriz normal N en una red libre, es defectuosa de rango debido a la incertidumbre del origen (defecto del datum) producido por los tres desplazamientos sin fijar. En consecuencia, la matriz normal es positivamente semidefinida con tres valores propios nulos. La solución óptima se obtiene mediante la pseudoinversa de Moore-Penrose, (39.3): X = Q Λ-1 QT AT P L (25.6) Si la red es mínimamente constreñida o sobre constreñida, queda fijada en orientación, escala y origen y desaparece el defecto del datum. La matriz normal N es ahora positivamente definida; es decir, de rango completo. La solución también esta dada por la (25.6). Para construir la matriz de diseño A, es necesario plantear ahora las ecuaciones de observación para componentes y distancias. Ecuaciones de observación para componentes: Denotamos la componente ∆X ajustada por ∆Xaij, para un vector GPS entre las estaciones I y J. ∆Xaij =Xj – Xi = ∆Xbij + v∆Xij (26.6) Xi, Xj son coordenadas ajustadas o parámetros de las estaciones I, J, ∆Xbij es la primera componente del vector ∆ observada y v∆Xij es la corrección o residuo correspondiente. Las coordenadas ajustadas son: Xi = Xiº + dXi, Xj = Xºj + dXj (27.6) Reemplazando (27.6) en (26.6): ∆Xaij =Xºj + dXj – Xºi - dXi = ∆Xbij + v∆Xij - dXi + dXj = ∆Xbij – (Xºj – Xºi) + v∆Xij
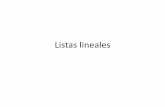
48
Haciendo Xºj – Xºi = ∆ºXij: - dXi + dXj = ∆Xbij – ∆ºXij + v∆Xij (28.6) Haciendo ahora ∆Xbij – ∆ºXij =L∆Xij: - dXi + dXj = L∆Xij + v∆Xij (29.6) La (29.6) es la ecuación de observación para la componente ∆X; análogamente: - dYi + dYj = L∆Yij + v∆Yij (30.6) - dZi + dZj = L∆Zij + v∆Zij (31.6) son las ecuaciones de observación para ∆Y y ∆Z respectivamente. Las (29.6) a (31.6), pueden escribirse ahora: - dXi + dXj = L∆Xij + v∆Xij - dYi + dYj = L∆Yij + v∆Yij - dZi + dZj = L∆Zij + v∆Zij y matricialmente, para el vector entre las estaciones I-J:
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−
∆
∆
∆
∆
∆
∆
M
M
M
M
M
M
M
Zij
Yij
Xij
Zij
Yij
Xij
j
j
j
i
i
i
vvv
LLL
dZdYdX
dZdYdX
...........................
...100...100...
...010...010...
...001...001...
...........................
(32.6)
Ecuaciones de observación para distancias: La distancia entre dos estaciones I-J: 222 )()()( ijijij ZZYYXX −+−+−=∆ ),,,,,( jjjiii ZYXZYXf= (33.6) es una función no lineal de las coordenadas o parámetros involucrados. Debe ser linealizada por un desarrollo en serie de Taylor. Los coeficientes numéricos del desarrollo son:

49
αcosºº
)ºº(2º2
1
0
−=∆
∆−=−
∆−=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
ji
jiij
jii
XXX
Xf (34.6)
Análogamente:
γβ cos;cos00
−=⎟⎠⎞
⎜⎝⎛
∂∂
−=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
Zif
Yf
i
γβα cos;cos;cos000
=⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
=⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
=⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
jjj Zf
Yf
Xf
α, β, γ son los cosenos directores de la dirección espacial I-J.
La ecuación de distancia linealizada, (35.6), es:
-cos α dXi – cos β dYi – cos γ dZi + cos α dXj + cos β dYj+ cos γ dZj = ∆bij – ∆ºij + v∆ij Haciendo ∆bij – ∆ºij = L∆ij, la (35.6) se escribe: -cos α dXi – cos β dYi – cos γ dZi + cos α dXj + cos β dYj + cos γ dZj = L∆ij + v∆ij (36.6) La expresión matricial para el vector I-J, (37.6), es:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−−− ∆∆
M
M
M
M
M
M
M
ijij
j
j
j
i
i
i
vL
dZdYdX
dZdYdX
...........................
...coscoscos...coscoscos...
...........................γβαγβα
Ecuaciones de observación para coordenadas: Si la estación I, por ejemplo, tiene coordenadas conocidas con errores estándar σXi, σYi, σZi, podemos asignar a dichas coordenadas la categoría de observaciones, cuyas ecuaciones son: Xai = Xºi + dXi = Xbi + vXi
Yai = Yºi + dYi = Ybi + vYi (38.6) Zai = Zºi + dZi = Zbi + vzi

50
Las Xºi, Yºi, Zºi, son las coordenadas aproximadas y las Xbi, Ybi, Zbi son las coordenadas conocidas que se consideran como “observadas”. Las (38.6) se escriben: dXi = Xbi – Xºi + vXi dYi = Ybi – Yºi + vYi (39.6) dZi = Zbi – Zºi + vZi Matricialmente, las ecuaciones de observación para las coordenadas conocidas de la estación I, son:
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
M
M
M
M
M
M
iZ
iY
iX
iZ
iY
iX
i
i
i
vvv
LLL
dZdYdX
...............
...100...
...010...
...001...
...............
(40.6)
El sistema de las ecuaciones de observación de la red GPS, (41.6), presenta el siguiente aspecto según las (32.6), (37.6) y (40.6):
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−
−−
−
∆
∆
∆
∆
∆
∆
∆
∆
M
M
M
M
M
M
M
M
M
M
M
Zi
Yi
Xi
ij
Zij
Yij
Xij
iZ
iY
iX
ij
Zij
Yij
Xij
j
j
j
i
i
i
vvv
v
vvv
LLL
L
LLL
dZdYdX
dZdYdX
..........................
...............100...
...............010...
...............001...
...........................
...coscoscos...coscoscos...
...........................
...100...100...
...010...010.....001...001.............................
γβαγβα
Cuando la red es vinculada, mínimamente constreñida o sobre constreñida, las ecuaciones de observación de las coordenadas de los constreñimientos externos o puntos fijos, resultan independientes de las ecuaciones de componentes y distancias. Se supera así, tanto el defecto rango de la matriz A como el defecto del datum. La matriz normal N = ATPA resulta ahora positivamente definida; es decir, no singular. La matriz de los pesos: Hemos dicho que la distancia entre dos estaciones I y J, es igual al módulo del vector GPS que las conecta: ∆ = ),,(222 ZYXfZYX ∆∆∆=∆+∆+∆ (42.6)

51
Desarrollando en serie de Taylor y conservando términos lineales solamente:
ZdZfYd
YfXd
Xf
∆∆∂∂
+∆∆∂∂
+∆∆∂∂
=∆ (43.6)
d∆X =∆X – ∆ºX; d∆Y = ∆Y – ∆ºY; d∆Z = ∆Z – ∆ºZ
)()()( 000 ZZZfYY
YfXX
Xf
∆−∆∆∂∂
+∆−∆∆∂∂
+∆−∆∆∂∂
=∆ (44.6)
)( 000 ZZfY
YfX
XfZ
ZfY
YfX
Xf
∆∆∂∂
+∆∆∂∂
+∆∆∂∂
−∆∆∂∂
+∆∆∂∂
+∆∆∂∂
=∆
En notación matricial:
CteZYX
Zf
Yf
Xf
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
∆∆∆
⎥⎦⎤
⎢⎣⎡
∆∂∂
∆∂∂
∆∂∂
=∆ (45.6)
La varianza de la distancia ∆, a partir de las componentes del vector ∆, es:
σ∆2 = ⎥⎦
⎤⎢⎣⎡
∆∂∂
∆∂∂
∆∂∂
Zf
Yf
Xf Σ∆
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∆∂∂∆∂∂∆∂∂
ZfYfXf
(46.6)
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∆∂∂∆∂∂∆∂∂
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎦⎤
⎢⎣⎡
∆∂∂
∆∂∂
∆∂∂
=
∆
∆∆∆
∆∆∆∆∆
∆
ZfYfXf
Zf
Yf
Xf
Zsim
ZYY
ZXYXX
2
2
2
2
σσσσσσ
σ (47.6)
Efectuando los productos de matrices en (47.6):
+⎟⎠⎞
⎜⎝⎛
∆∂∂
+⎟⎠⎞
⎜⎝⎛
∆∂∂
+⎟⎠⎞
⎜⎝⎛
∆∂∂
= ∆∆∆∆2
22
22
22
ZYX Zf
Yf
Xf σσσσ
ZYZXYX Zf
Yf
Zf
Xf
Yf
Xf
∆∆∆∆∆∆ ∆∂∂
∆∂∂
+∆∂∂
∆∂∂
+∆∂∂
∆∂∂
+ σσσ 222 (48.6)

52
∆
∆==
∆∂∂
∆∆
==∆∂∂
∆∆
==∆∂∂ Z
ZfY
YfX
Xf γβα cos;cos;cos
Remplazando en (48.6):
+⎟⎠⎞
⎜⎝⎛
∆∆
+⎟⎠⎞
⎜⎝⎛
∆∆
+⎟⎠⎞
⎜⎝⎛
∆∆
= ∆∆∆∆2
22
22
22
ZYXZYX σσσσ
ZYZXYXZYZXYX
∆∆∆∆∆∆ ∆∆∆
+∆∆∆
+∆∆∆
+ σσσ 222 222
y operando algebraicamente, se obtiene la expresión (49.6) para la varianza de la distancia ∆:
22 2
∆=∆σ [0.5 (∆X2σ∆X
2 + ∆Y2σ∆Y2 + ∆Z2σ∆Z
2) + ∆X∆Yσ∆X∆Y + ∆X∆Zσ∆X∆Z +
+ ∆Y∆Zσ∆Y∆Z] Ejemplo 1.6: Se ha medido un vector GPS entre las estaciones I, J con dos receptores geodésicos (doble frecuencia) y el procesamiento de la fase de la portadora arroja el siguiente resultado: El vector GPS ∆ medido, es: ∆ = [∆X, ∆Y, ∆Z]T = [-13699.115, -6568.702, 1227.127]T La matriz varianza-covarianza del vector ∆, es:
Σ∆ = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−−
−−−
∆
∆∆∆
∆∆∆∆∆
6
65
766
2
2
2
31491110.689644810.660379810.165579010.765381410.172024010.2
simZsim
ZYY
ZXYXX
σσσσσσ
Hallar la varianza σ∆
2 y el error estándar σ∆ de la distancia ∆. El error estándar especificado, (σ∆), para la distancia ∆ es: (σ∆) = 5 mm + 1 ppm ∆ (mm) (50.6) Calcular (σ∆) y compararlo con σ∆. ∆ = mZYX 029.15242222 =∆+∆+∆ ∆2= 232319438.421 m2
( ) 4222222 300200.60521 mZYX ZYX =∆+∆+∆ ∆∆∆ σσσ

53
∆X ∆Y σ∆X∆Y = -148.819121 m4 ∆X ∆Z σ∆X∆Z = 12.870143 m4 ∆Y ∆Z σ∆Y∆Z = -55.589726 m4
------------------ ------------------- Suma = -191.538704 m4
σ∆2 = [ ] 2656200510.3)538704.191(300200.605421.232319438
2 m−=−+
σ∆ = 0.001887 m ≈ 0.002 m = 2 mm (σ∆) = 5 mm + 1 ppm ∆ (mm) = 5 mm + 1 10-6 15242029 mm = 20.02 mm = 0.0202 m (σ∆)2 = 4.0804 10-4 m2 En síntesis: σ∆ = 1.887 mm y (σ∆) = 20.02 mm El error estándar de ∆ calculado a partir de la matriz varianza-covarianza del vector ∆ resulta en general, menor (más optimista) que el error estándar especificado de ∆, estimado por la (50.6). Es necesario pues, definir un factor de escala FE, a fin de escalar la matriz varianza-covarianza Σ∆. Definimos entonces el factor de escala:
2
2)(
∆
∆=σσFE (51.6)
La matriz varianza-covarianza escalada: (Σ∆) = FE Σ∆ (52.6) Para el ejemplo (1.6)
5535.11456200510.30804110.4)(
6
4
2
2
=== −
−
∆
∆
σσFE
Aplicando (52.6):
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −−=Σ
−
−−
−−−
∆4
43
544
23394910.790012010.783720610.176997210.889450110.111612910.3
)(
sim
La matriz de los pesos, es la inversa de la matriz varianza- covarianza escalada: P = (Σ∆)-1 (53.6) Ejemplo 2.6: Sean tres estaciones 1, 2, 3 conectadas por tres vectores GPS ∆1, ∆2, ∆3. Escribir la matriz varianza-covarianza escalada, (Σ∆), y la matriz de los pesos, P.

54
Datos: vector org.- extr. Componentes distancia ∆1 1 2 ∆X1 ∆Y1 ∆Z1 ∆1 ∆2 2 3 ∆X2 ∆Y2 ∆Z2 ∆2 ∆3 1 3 ∆X3 ∆Y3 ∆Z3 ∆3 Las matrices varianza-covarianza de cada vector.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=Σ
∆
∆∆∆
∆∆∆∆∆
∆2
1
112
1
11112
1
1
Zsim
ZYY
ZXYXX
σσσσσσ
, ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=Σ
∆
∆∆∆
∆∆∆∆∆
∆2
2
222
2
22222
2
2
Zsim
ZYY
ZXYXX
σσσσσσ
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=Σ
∆
∆∆∆
∆∆∆∆∆
∆2
3
332
3
33332
3
3
Zsim
ZYY
ZXYXX
σσσσσσ
Errores estándar especificados para las distancias: (σ∆1) = a + b ppm ∆1 (mm), (σ∆2) = a + b ppm ∆2 (mm), (σ∆3) = a + b ppm ∆3 (mm) Factores de escala:
21
21
1)(
∆
∆=σσFE , 2
2
22
2)(
∆
∆=σσFE , 2
3
23
3)(
∆
∆=σσ
FE
Los valores de σ∆1
2, σ∆22, σ∆3
2 se obtienen de la (49.6). Las matrices varianza-covarianza escaladas para los vectores ∆v, v = 1, 2, 3:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
∆
∆∆∆
∆∆∆∆∆
2
2
2
Zvsim
ZvYvYv
ZvXvYvXvXv
vv FEQσ
σσσσσ
= ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
33
2322
131211
vsim
vv
vvv
qqqqqq
La matriz varianza especificada para las distancias ∆v, v = 1, 2, 3:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
∆
∆
∆
∆2
3
22
21
2
)()(
)()(
σσ
σσ
La matriz varianza- covarianza escalada para el triangulo espacial:
55
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
∆
∆
∆
23
22
21
999897
898887
797877
666564
565554
464544
333231
232221
131211
)()(
)(
σσ
σqqqqqqqqq
qqqqqqqqq
qqqqqqqqq
Q
La matriz de los pesos: P = Q-1 La matriz P es, también, diagonal por bloques de orden 3 x 3; es decir:
P1 = Q1-1, P2 = Q2
-1, P3 = Q3-1, P4 = [ (σ∆)2] -1 =
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∆
∆
∆
23
22
21
)(1
)(1
)(1
σ
σ
σ
La prueba chi-cuadrado: Sea una red GPS con n observaciones. Se tiene entonces una muestra de tamaño n. El vector de los residuos de la red ajustada es V = A X – L, cuyas componentes son vi , i = 1,…, n. La variable estocástica que representa a los residuos es v, con varianza estimada:
νν
σ∑
===
n
iiiT vp
PVV 1
2
20ˆ
donde ν = n – R (A) = n – m + d: m ≡ número de parámetros, d ≡ defecto de rango de la matriz A. 2
0σ̂ se denomina la varianza muestral o varianza a-posteriori de peso 1. Llamamos σ0
2 a la varianza poblacional o varianza a-priori, suponiendo una población de observaciones infinitamente grande. Se define el siguiente estadístico muestral:

56
20
1
2
20
20
202 ˆ
σσσσ
νχ∑
====
n
iiiT vp
PVV (54.6)
que distribuye chi-cuadrado con ν grados de libertad si v distribuye normal con media cero y varianza σ0
2. Se formulan las siguientes hipótesis: Hipótesis nula (H0): σ0
2 = 20σ̂
Hipótesis alternativa (H1): 20
20 σ̂σ ≠
La varianza muestral 2
0σ̂ es un estimador insesgado de la varianza poblacional, entonces la esperanza del estadístico muestral es igual al parámetro poblacional a estimar: [ ] 2
02
0ˆ σσ =E (55.6) Seleccionamos un nivel de significación α y el nivel de confianza es 1 - α. La H0 establece que la varianza a- priori de peso 1 o varianza poblacional, es estadísticamente igual a la varianza a-posteriori de peso 1 o varianza muestral. Esto significa que ambas varianzas no difieren significativamente al nivel de significación o riesgo α. Si se acepta H0 (o al menos no se rechaza) al nivel α, el ajuste se dice correcto. Se acepta la hipótesis nula si:
21,
22
2,
2 αν
αν χχχ −pp (56.6)
de la (54.6)
2
1,2
20
20
2,
2 ˆ αν
αν χ
σσ
νχ −pp
2
1,22
0
20
2,
2
1ˆ
11α
να
ν χσσ
νχ −ff
2
,2
202
0
21,
2
20 ˆˆ
αν
αν χ
σνσ
χσν
pp−
(57.6)
La (57.6) define un intervalo de confianza para la varianza poblacional σ0
2 al nivel de significación α. Esto significa que la varianza poblacional se encuentra entre los límites indicados a un nivel de confianza 1 - α y se tiene una probabilidad α de equivocarse al hacer tal afirmación. También puede decirse que la varianza muestral o a-posteriori no difiere significativamente de la varianza poblacional o a-priori. Si la condición (57.6) no se cumple, entonces la diferencia entre ambas varianzas es significativa al nivel α y

57
deberá rechazarse la hipótesis nula. La no aceptación de H0 significa que el ajuste mínimos cuadrados de la red no es correcto. Si adoptamos un nivel de significación α = 0.05, el nivel de confianza es 0.95 y el intervalo de confianza será:
025.0,
2
202
0975.0,
2
20 ˆˆ
νν χσν
σχ
σνpp (58.6)
En los ajustes mínimos cuadrados, se establece que la varianza a-priori de peso 1 es igual 1, entonces:
025.0,
2
20
975.0,2
20 ˆ1ˆ
νν χσν
χσν
pp (59.6)
Cuando se cumple la condición (59.6), estamos aceptando al 95% de confianza que los residuos vi, i = 1, n distribuyen normal con media cero y varianza σ0
2, tal como lo predice la teoría de los errores de Gauss. El rechazo de la hipótesis nula se interpreta como una indicación de que algo anda mal en el ajuste. Una causa frecuente de rechazo de H0 es la presencia de uno o más errores no tolerables en las observaciones. Un modelo matemático inadecuado o la modelación incorrecta de los errores de observación, son causales de rechazo de la hipótesis nula. Ajuste libre y ajuste vinculado: El ajuste libre es necesario para determinar el acuerdo interno de la red. Si se supera la prueba chi-cuadrado, se tendrá la seguridad de que las observaciones están libres de errores no tolerables, el modelo matemático está debidamente linealizado y los errores han sido correctamente modelados. Se ejecuta entonces el ajuste vinculado a uno o más puntos fijos de coordenadas conocidas en WGS’84, con el objeto de dar coordenadas ajustadas a todas las estaciones de la red, en el mismo sistema de referencia de los constreñimientos externos. Una vez ejecutado exitosamente el ajuste vinculado, las coordenadas cartesianas de la red deberán transformarse a coordenadas geodésicas, latitud, longitud y altura elipsoidal. La transformación de coordenadas, puede hacerse mediante procesos iterativos y cerrados que conducen a los mismos resultados. Los algoritmos se presentan en detalle en los buenos textos de Geodesia. La red óptima: La red óptima es aquella que permite lograr las precisiones preestablecidas a costo mínimo. Uno de los factores con fuerte incidencia en el costo de una red, es el número de observaciones. Se trata pues, de lograr las precisiones requeridas con un mínimo de observaciones. Toda selección de la red óptima tiene significado, solamente si hemos hecho una definición sobre como comparar las diferentes redes. Debe definirse algún tipo de prueba que pueda dar una indicación útil. Se requiere de una medida que sea invariante respecto del origen y cualquier rotación; es decir que sea invariante respecto del sistema de referencia.

58
Si consideramos todos los puntos de la red como incógnitas, tenemos una red libre de constreñimientos externos donde la solución óptima está dada por la pseudoinversa N+ que es única. La traza de la matriz varianza-covarianza del vector incógnita X, ΣX, es:
tr (ΣX) = ( ) )(20
1
222 +
=
=++∑ Ntrk
iZiYiXi σσσσ (60.6)
donde k es el número de estaciones y σXi, σYi, σZi son los errores estándar de las coordenadas Xi, Yi, Zi, respectivamente. La (60.6) resulta invariante respecto del sistema coordenado. Una medida adecuada para comparar las distintas redes, es la varianza singular media (Bjerhammar, 1973):
( ) )(11 20
1
2222 +
=
=++= ∑ Ntrkk
k
iiZiYiXsm σσσσσ (61.6)
que es una expresión invariante, de todas las coordenadas. La división por el número de estaciones de la red, permite una medida que puede usarse para comparar redes con diferente número de estaciones. La matriz normal N = ATPA, depende de la matriz de diseño A y de la matriz de los pesos, P. La matriz A se construye a partir de las coordenadas aproximadas adoptadas a priori y la matriz de los pesos puede obtenerse con los errores a-priori de las distancias, obviando en primera instancia las correlaciones entre las componentes de los vectores GPS. Así, la pseudoinversa N+ y la matriz varianza-covarianza ΣX, con σ0
2 = 1, permiten estudiar distintas alternativas hasta lograr la red óptima; es decir aquella que presenta la menor varianza singular media. Otra medida invariante respecto del sistema de referencia, es el elipsoide de error en cada estación de la red GPS libre. Sea:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=Σ2
2
2
,,
Zjsim
YjZjYj
XjZjXjYjXj
jZjYjX
σσσσσσ
(62.6)
el j-ésimo bloque diagonal de orden 3x3 de la matriz ΣX. De los elementos de la matriz (62.6), se obtienen los semiejes A, B, C del elipsoide de error y sus orientaciones espaciales (cosenos directores). La ecuación del elipsoide de error para un nivel de confianza 1 - α, es:
1)3(ˆ)3(ˆ)3(ˆ 2
,332
0
23
2,32
20
22
2,31
20
21 =++
−−− mnmnmn Fz
Fz
Fz
ααα λσλσλσ (62.6a)
donde:
- λ1, λ2, λ3 son los valores propios, ordenados de mayor a menor, del boque diagonal de orden 3x3 correspondiente a la estación nueva Ej en la matriz varianza-covarianza ΣX de la red. Puesto que ΣX es simétrica positivamente definida, sus valores propios son números reales positivos y sus vectores propios son ortogonales entre sí.

59
- z1, z2, z3 son los ejes coordenados definidos por los vectores propios del bloque diagonal 3x3, correspondientes a los valores propios λ1, λ2, λ3, centrados en la estación nueva Ej: - La matriz varianza-covarianza de la red, es:
12
0 )(ˆ −=Σ PAATX σ = 12
0ˆ −Nσ (62.6b) donde A es la matriz de diseño de la red GPS y P es la matriz de los pesos estimados de las observaciones. N es la matriz normal. - Fα 3,n-m es el valor de tabla de la distribución F de Fisher con ν1 = 3 y ν2 = n - m grados de libertad, α es el nivel de riesgo o significación, n es el número de observaciones y m es el número de parámetros o incógnitas. - 2
0σ̂ es la varianza a-posteriori, dada por:
mn
PVV T
−=2
0σ̂ (62.6c)
V es el vector de los residuos o correcciones a las observaciones.
Si en la (62.6a) hacemos 31
,3 =−mnF α , tendremos la ecuación del elipsoide de error
estándar. Los semiejes escalados para un nivel de confianza 1 - α son: mnFA −= ,310 3ˆ αλσ
mnFB −= ,320 3ˆ αλσ (62.6d)
mnFC −= ,330 3ˆ αλσ donde: mnFFE −= ,33 α (62.6e) es el factor de escala. Si consideramos la varianza a-priori σ0
2 = 1, las expresiones (62.6d), nos dan los semiejes escalados a-priori, que permiten hacer una estimación previa del error de posicionamiento; es decir, sin necesidad de los vectores GPS observados. Basta solamente conocer las coordenadas aproximadas Xº, Yº, Zº de las estaciones para construir la matriz de diseño A, y los errores estándar especificados de las líneas-base para estimar la matriz P de los pesos a-priori. La matriz varianza-covarianza ΣX, esta dada por: T
X QQN 11 −− Λ==Σ (62.6f) donde Λ es una matriz diagonal cuyos elementos diagonales son los valores propios, todos positivos, de la matriz normal N que es simétrica positivamente definida. Q es una matriz ortogonal cuyas columnas son los vectores propios normalizados de N. Para la estación nueva Ej, se tiene una submatriz de orden 3x3 simétrica, que es un bloque diagonal de la matriz ΣX :

60
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=Σ2
2
2
),,(
Zjsim
YjZjYj
XjZjXjYjXj
jZYX
σσσσσσ
(62.6g)
Se calculan los valores propios λ1, λ2, λ3 de la matriz Σ(X, Y, Z) j, se reemplazan en las (62.6d) y, considerando la varianza a-priori σ0
2 = 1, se obtienen los semiejes a-priori escalados al 95% de confianza. Las componentes de los vectores propios normalizados; es decir, los cosenos directores de los semiejes, definen sus respectiva orientaciones en el espacio. Puede calcularse los rumbos ψ y las elevaciones θ que también definen la orientación de los semiejes. Frecuentemente se desea conocer la precision del posisionamiento GPS en dos dimensiones. Se prefiere hacerlo con tres elipses de error, una horizontal y dos verticales, en los planos coordenados del sistema geodésico horizontal local, centrado en cada una de las estaciones Ei de la red. Los ejes coordenados son n, e, h; es decir norte, este y la dirección de la normal al elipsoide de referencia en la estación Ei. Según la ley general de la propagación de la varianza-covarianza:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=Σ=Σ2
2
2
),,(,,
hsim
hee
hnennT
iZiYiXiii RRhenσσσσσσ
(63.6)
donde:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−−=
iiiii
ii
iiiii
sensensen
sensensenR
ϕλϕλϕλλ
ϕλϕλϕ
coscoscos0cos
coscos (64.6)
es la matriz de transformación de coordenadas entre el sistema geodésico geocéntrico absoluto (G, X, Y, Z) y el sistema geodésico horizontal local (Ei, n, e, h); ϕi, λi son las coordenadas geodésicas latitud y longitud de la estación Ei. De la (63.6), se extraen las submatrices de orden 2x2:
⎥⎦
⎤⎢⎣
⎡2
2
esim
enn
σσσ ; ⎥
⎦
⎤⎢⎣
⎡2
2
hsim
hnn
σσσ ; ⎥
⎦
⎤⎢⎣
⎡2
2
hsim
hee
σσσ (65.6)
La elipse de error horizontal, se obtiene de la primera submatriz, partiendo del polinomio característico: ( ) 0)( 222222 =−++− enenen σσσλσσλ (66.6) Con los valores propios máximo y mínimo, λmáx., λmín. (raíces del polinomio característico), se calculan los semiejes de la elipse horizontal n-e:

61
Semieje mayor: .máxA λ= , Semieje menor: .mínB λ= (67.6) La orientación del semieje mayor A, es:
22
221
en
enarctgσσ
σϕ
−= (68.6)
ϕ es el ángulo que forma el semieje mayor A con el eje coordenado n. En forma análoga, de las submatrices segunda y tercera, se obtienen las elipses verticales n-h y e-h, respectivamente. Es conveniente destacar que éstas son elipses estándar; es decir, del 39% de confianza. El factor de magnificación por el que debe multiplicarse los semiejes A y B de la elipse estándar para obtener la elipse correspondiente a otro nivel de probabilidad, depende no solamente del nivel seleccionado, sino también de la redundancia ν = n – R (A) de la red. Intuitivamente, esto tiene sentido puesto que al crecer el número de observaciones n, los errores de posicionamiento decrecen en magnitud y, en consecuencia, se obtienen elipses de menor tamaño. Los factores de magnificación se muestran en la siguiente tabla (A. Leick, 1995): Probabilidad 1 - α ν 95% 98% 99% 1 20.00 50.00 100.00 2 6.16 9.90 14.10 3 4.37 6.14 7.85 4 3.73 4.93 6.00 5 3.40 4.35 5.15 6 3.21 4.01 4.67 8 2.99 3.64 4.16 10 2.86 3.44 3.89 12 2.79 3.32 3.72 15 2.71 3.20 3.57 20 2.64 3.09 3.42 30 2.58 2.99 3.28 50 2.52 2.91 3.18 100 2.49 2.85 3.11 ∞ 2.45 2.80 3.03 Para comparar las distintas redes, puede usarse también la suma de las áreas de las elipses de error, denominada el área de incertidumbre:
∑=
=k
iii BAArea
1
π (69.6)
que califica el tamaño de las elipses de error, y la suma de las excentricidades:

62
∑=
−=
k
i i
ii
ABA
Excentr1
. (70.6)
que califica la forma de las elipses de error. Fiabilidad: La teoría aquí delineada sigue a Baarda (Leick, A.1995 y Chueca Pazos, 2000) y está relacionada con la estadística del ajuste. La configuración apropiada de las figuras geométricas constituyentes de la red, la pequeñez de los residuos y varianzas, la compatibilidad estadística de los estimadores de la varianza de la observación de peso 1 a priori y a posteriori, la compatibilidad de la red libre y la sometida a constreñimientos externos y la buena configuración de las elipses de error, entre otras, son pruebas de buena calidad de una red. Sin embargo puede no ser suficiente. Así, un error grosero introducido en una observación, influye en todos los residuos de la red y desequilibra su calidad. Se llama fiabilidad interna de la red a su capacidad, expresada numéricamente, de control general y especifico de las observaciones junto con la detección y particularización de posibles errores groseros. Del mismo modo, es necesario relacionar los posibles errores no eliminados o remanentes de la red con su influencia en los parámetros ajustados. Se llama entonces fiabilidad externa a la respuesta y sensibilidad de la red ante un nivel de error cualquiera en sus observaciones. Recordando las expresiones de las matrices varianza-covarianza del vector Lb de las observaciones y del vector X de las incógnitas: bLbL QP 2
012
0 ˆˆ σσ ==Σ − (71.6) XX QN 2
02
0 ˆˆ σσ ==Σ + (72.6) donde QLb = P-1 y QX = N+ son las matrices cofactor de los vectores Lb y X, respectivamente. Puede hallarse una expresión para la matriz cofactor del vector de los residuos V: V = AX – L V = A N+ATPL – L V = (AN+ATP – I) L V = (AN+AT – P-1) PL (73.6) De la ley general de la propagación de la varianza covarianza: ΣV = (AN+AT- P – 1) P ΣL [(AN+AT – P-1) P]T (74.6) ΣV = 2
0σ̂ (AN+AT- P – 1) P P-1P (AN+AT – P-1) ΣV = 2
0σ̂ (AN+AT- P – 1) (PAN+AT – I)

63
ΣV = 20σ̂ [AN+ (ATPA) N+AT- AN+AT-AN+AT + P-1]
ΣV = 2
0σ̂ [A (N+ NN+) AT- AN+AT-AN+AT + P-1] ΣV = 2
0σ̂ [AN+AT- AN+AT-AN+AT + P-1] ΣV = 2
0σ̂ [-AN+AT + P-1] (75.6) La matriz cofactor del vector de los residuos es: QV = P-1 – AN+AT (76.6) El vector de las observaciones ajustadas es: La = Lb + V = Lb +AX - L La = Lb + AN+ATPL – L La = Lb + AN+ATPL – (Lb – Lº) La = AN+ATPL + Lº (77.6) La matriz varianza-covarianza de La es: ΣLa = (AN+ATP) ΣL (AN+ATP)T (78.6) ΣLa = 2
0σ̂ AN+AT PP-1 PAN+AT
ΣLa = 20σ̂ AN+ (AT PA) N+AT
ΣLa = 20σ̂ A (N+NN+) AT
ΣLa = 20σ̂ A N+ AT (79.6)
La matriz cofactor del vector La es: QLa = AN+AT (80.6) En resumen: ΣLb = 2
0σ̂ QLb = 20σ̂ P-1
ΣX = 20σ̂ QX = 2
0σ̂ N+
ΣLb = 20σ̂ QV = 2
0σ̂ (P-1 – AN+AT)
ΣLa = 20σ̂ QLa = 2
0σ̂ AN+AT Multiplicando a derecha ambos miembros de (76.6): QVP = I – AN+ATP (81.6) Puede demostrarse que:

64
tr(QVP) = n – R (A) = ν Denotando por ri a los elementos de la diagonal principal de QVP:
tr(QVP) = ∑=
=n
iir
1 n – R (A) = ν (82.6)
donde ν es la redundancia de la red y ri es el número de redundancia de la i-ésima observación. El número de redundancia ri, representa la contribución de la i-ésima observación a la redundancia ν de la red. De la (82.6): ri = qi pi (83.6) donde qi, pi son los elementos de orden i de la diagonal principal de las matrices QV y P. De las (76.6) y (80.6): P-1 = QV + AN+AT = QV + QLa (84.6) Los elementos de la diagonal principal de QV son todos mayores que cero por tratarse de una matriz cofactor, lo mismo sucede con los elementos diagonales de QLa y teniendo en cuenta la (84.6):
0 ≤ qi ≤ ip
1 (85.6)
Multiplicando por pi ambos miembros de (85.6): 0 ≤ qi pi ≤ 1 0 ≤ ri ≤ 1 (86.6) La redundancia de una observación cualquiera es siempre positiva y menor que la unidad, siendo la suma de todas ellas la redundancia general de la red. De la (84.6): QLa = P-1 – QV (87.6) Si los números de redundancia son cercanos a la unidad, se tendrá: ri ≈ 1 (88.6) qi pi ≈ 1 (89.6)
i
i pq 1
≈ (90.6)
y en (87.6), con qai = elemento de orden i de la diagonal principal de QLa:

65
qai = pi
-1 – qi ≈ 0 (91.6) 0ˆˆ 2
02 ≈= iaia qσσ (92.6)
Se infiere que si la redundancia del observable se acerca a la unidad, la varianza del observable ajustado, 2ˆ iaσ , tenderá a cero. Del mismo modo: ii qp 2
012
0 ˆˆ σσ =− (93.6) El ajuste da lugar a varianzas pequeñas en las observaciones ajustadas. Las observaciones ajustadas son claramente más precisas que las iniciales, y se concluye la ventaja de disponer de observaciones con redundancias cercanas a la unidad, que deben buscarse y preferirse. Al contrario, si los números de redundancia son cercanos a cero: ri ≈ 0 (94.6) qi ri ≈ 0 (95.6) qi ≈ 0 (96.6) Las varianzas de los residuos son: 0ˆ 2
0 ≈iqσ (97.6) Las varianzas de las observaciones ajustadas, de la (91.6), son: 12
02
0 ˆˆ −≈ iia pq σσ (98.6) Si las expresiones anteriores se extienden y cumplen a lo largo de la red, las varianzas de los residuos resultarán muy pequeñas y las varianzas de los observables ajustados no variaran sensiblemente con respecto a las iniciales. Se habrá logrado muy escasa ventaja en precisión al practicar el ajuste y en consecuencia, deberán evitarse las observaciones de redundancias cercanas a cero. De la (71.6): 12
0ˆ −=Σ PbL σ siendo el peso de la i-ésima observación el elemento del mismo orden pi de la diagonal principal de la matriz P, que valdrá:
2
20
iip
σσ
= (99.6)
cociente de las varianzas a priori de la observación de peso 1 y de la observación i-ésima.

66
Pero siendo: )(ˆˆ 12
02
0T
VV AANPQ +− −==Σ σσ escribimos la desviación estándar a posteriori del residuo vi: iiv q0ˆˆ σσ = (100.6) de donde:
20
2
00ˆˆσσ
σσσ ii
i
iiv r
pr s
==
ii
iv r0
0ˆˆσσ
σσ = (101.6)
Si 0σ̂ es estadísticamente igual a σ0 (aceptación de H0 en la prueba chi-cuadrado) y ri ≈ 1, se tiene de la (101.6): iiv σσ ≈ˆ (102.6) es decir; la desviación estándar estimada de un residuo vi es igual, en orden de magnitud, a la desviación estándar de la observación lbi correspondiente. Con lo que se confirma nuevamente a las redundancias ri particulares de las observaciones como un buen índice de calidad del ajuste, que será tanto mejor cuanto más se aproximen dichos valores a la unidad. En primera instancia, puede expresarse la redundancia media del ajuste:
n
Ann
rM)(ℜ−
==ν (103.6)
con la misma interpretación para juzgar al conjunto de la red. Control de errores groseros: El control de errores groseros en el ajuste requiere de la formulación de las siguientes hipótesis: H0: Las observaciones no contienen errores groseros. H1: - Las observaciones contienen un error grosero.
- Está localizado en la i-ésima observación. - Su magnitud es ∇i.
En el vector de observaciones Lb, la i-ésima observación es errónea, lbi + ∇i: lbi +∇i – fi(Xº) = Li + ∇i (104.6)

67
La i-ésima componente del vector L es: Li + ∇i. De las (73.6) y (76.6): V = -QV PL (105.6)
V = -QV P
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∇+
n
ii
L
L
LL
M
M2
1
= -QV P
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
∇
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
i
n
i
L
L
LL
0
1
00
2
1
M
M
M
M
Haciendo ei = [0,0,…, 1,…,0]T: V = - QV P (L – ei∇i) = - QV PL + QV Pei∇i (106.6) Bajo la hipótesis alternativa H1, el vector de residuos se expresa por: V/H1 = QV Pei ∇i – QV PL V/H1 = QV Pei ∇i + V (107.6) La esperanza matemática del vector V, bajo la hipótesis H1, es: E (V/H1) = QV Pei∇i (108.6) puesto que , por hipótesis, E (V) = 0. La matriz varianza-covarianza, bajo la hipótesis H1, es: ΣV/H1 = σ0
2 QV (109.6) en virtud de que QV Pei∇i es constante. Entonces V/H1 es una variable estocástica conjunta que distribuye normal con media QV
Pei ∇i y varianza-covarianza σ02 QV; es decir:
V/H1 ∼ N (QV Pei∇i , σ0
2 QV) (110.6) Los residuos individuales vi son a su vez, variables estocásticas que distribuyen normal con media qi pi∇i y varianza σ0
2qi, es decir: vi /H1 = ∼ n (qi pi∇i, σ0
2qi) (111.6) Estandarizando la variable vi /H1:
iv
HH
vσ
ω)/(
/ 1111 = (112.6)

68
y teniendo en cuenta que iiv q0σσ = , podemos escribir:
i
HiH q
v
0
111
)/(/
σω = ∼ )1,(
0 i
iii
qpq
nσ
∇ (113.6)
Multiplicando y dividiendo la esperanza de ω1/H1 por iq :
0
11 )/(σ
ω iiiH
pqE
∇= (114.6)
Entonces:
iv
HiH
vσ
ω)/(
/ 111 = ∼ n (
0σiii pq ∇
, 1) (115.6)
Bajo la hipótesis nula H0:
H0: iv
Hivσ
ω)/( 0
0 = ∼ n (0,1) (116.6)
El parámetro de no-centralidad, traslación o desplazamiento; es decir, la media de una distribución gaussiana no-central, se denota por δi y es:
0σ
δ iiii
qp∇= (117.6)
Puesto que: 2
20
iip
σσ
=
ii pσσ =0 (118.6) Reemplazando (118.6) en (117.6):
ii
iiii p
qpσ
δ∇
= (119.6)
Multiplicando y dividiendo el segundo miembro de (119.6) por ip :
i
iii
ii
iiiii
qpp
qppσσ
δ∇
=∇
=
Puesto que ri = piqi, el parámetro de traslación es:

69
i
iii
rσ
δ∇
= (120.6)
y el error grosero ∇i:
i
iii r
σδ=∇ (121.6)
La expresión (121.6) muestra una vez más la conveniencia de lograr redundancias elevadas, cercanas a la unidad si es posible, a efectos de minimizar ∇i para el parámetro de traslación δi de la i-ésima observación. Ningún ∇i ni δi será conocido en su verdadera dimensión. Es preciso entonces, aplicar el método estadístico usual de prueba de contraste de errores tipo I y tipo II. Será necesario establecer el nivel de significación α de rechazo de la hipótesis nula. Generalmente se establece un valor α muy pequeño para asegurar un mínimo de rechazo de observaciones aceptables o errores de tipo I (rechazar H0 cuando debe ser aceptada). La probabilidad de cometer un error de tipo I bajo la hipótesis nula, puede expresarse en la forma:
∫−
=−−=−=≥2
22
0 )1(1)1,0(1)(
α
αα ααω
t
t
dtntP (122.6)
obteniéndose
2αt de las tablas de la distribución normal.
El tratamiento del error de tipo II requiere establecer la potencia del test β o probabilidad de aceptación de la hipótesis alternativa H1, siendo verdadera. La probabilidad de cometer un error de tipo II será, por tanto, igual a 1 – β. Su expresión es:
∫∞−
−=−=≥2
02
1 1)1,(1)(
α
α βδωt
dtntP (123.6)
Para fijar ideas y según es de general aplicación, establezcamos: α = 0.001 β = 0.90 En la figura se representa la aplicación de las expresiones (122.6) y (123.6):

70
En las tablas de distribución normal entramos con el argumento:
4995.00005.05.0215.0 =−=− α
obteniéndose: t = 3.29 Para que el parámetro de desplazamiento δ0 de lugar a β = 0.90, será preciso entrar con el argumento 0.90 – 0.50 = 0.40, obteniendo t = 1.28. Con lo que resulta inmediatamente: δ0 = 3.29 + 1.28 = 4.57 A partir de la (111.6) se obtiene el llamado ω-test debido a Baarda, ampliamente utilizado en la exploración de posibles errores groseros cometidos en el ajuste de redes. La (113.6) es el test de Baarda bajo la hipótesis alternativa H1, que conduce a contrastar una distribución normal con un parámetro de traslación que es proporcional al error grosero ∇i y sirve, por tanto, para controlarlo. La interpretacion completa del test de Baarda con parámetros α = 0.001 y β = 0.90 es inmediata:
- Un residuo estandarizado que cumpla: 29.30 ≥=iv
ii
vσ
ω supone el rechazo de la
hipotesis nula con un nivel de significación de α = 0.001. Es decir hay solo 1 por 1000 de probabilidad de que se rechace la observacion y sea correcta. Con fiabilidad 0.999 contendra un error grosero.
- Con el criterio anterior, cualquier error grosero que cumpla:
i
i
i
ii rr
σσδ57.40
0 ≥=∇ (124.6)
será rechazado con una fiabilidad de β = 0.90. Podrán deslizarse, por tanto, hasta un 10% de errores iguales o superiores al indicado y será preciso admitir como norma general los inferiores al valor establecido en (124.6). Siendo conocidos los valores de σi y ri de cada observación puede, pues, analizarse el ajuste suprimiendo sucesivamente y en orden descendente aquellos que excedan el valor establecido para ω0i, realizando un nuevo ajuste despues de cada supresión, hasta la aceptación en bloque de todas las observaciones remanentes.
β = 0.90
1/2 α = 0.0005δ = 4.57
3.29 1.28
71
Especialmente importante es contrastar la adecuacion de los pesos y errores a priori imputados a las observaciones. Si la precisión supuesta a priori resulta ser muy inferior a la lograda, el número de observaciones rechazadas será elevado y la descripcion de la red será irreal. La aceptación de la prueba chi-cuadrado para la varianza a posteriori, es una buena indicación de la adecuación de los pesos y errores a priori de las observaciones. La elección del parámetro de significación α y la potencia del test β tampoco es arbitraria, mereciendo la pena frecuentemente realizar más de una prueba. Puede empezarse con los valores presentados (α = 0.001 y β = 0.90) y, si el resultado, por cualquier razón no es satisfactorio, ensayar alguna pareja de valores distintos, cuyo cálculo es sencillo. La siguiente tabla ofrece pares α y β junto al parametro de traslación asociado (Chueca Pazos, 2000): α β δ0 0.050 0.80 2.80 0.025 0.80 3.10 0.001 0.80 4.12 0.050 0.90 3.24 0.025 0.90 3.52 0.001 0.90 4.57 Fiabilidad interna: Segun se vio, se entiende por fiabilidad interna de la red, su capacidad de detección y control de posibles errores groseros en las observaciones. La expresion (124.6) es utilizable en cuanto el modelo matemático y el estocástico sean conocidos. A traves de ella es posible determinar la sensibilidad de la red ante los errores groseros y, por tanto, tomar desiciones lógicas sobre su proyecto y observación, modificando en cuanto sea necesario y siempre dentro de las posibilidades del terreno su configuracion inicial hasta su optimización. En consecuencia el estudio de la fiabilidad interna de la red es útil no solamente para conocer la calidad del ajuste realizado, sino para proyectarlo previamente. Así, tanto en simulación y proyecto como en control de redes, el primer parámetro de control de fiabilidad interna, presente en todas las expresiones deducidas, es el número de redundancia ri de cada observable. Se dice que un observable está: - perfectamente controlado si: ri = 1 - bien controlado si : 0.4 ≤ ri ≤ 1 - débilmente controlado si : 0.1 ≤ ri ≤ 0.4 - mal controlado si : 0 ≤ ri ≤ 0.1 - no está controlado si : ri = 0 Es útil el estudio de homogeneidad de una red comparando las redundancias en distintas zonas con la redundancia media (103.6). Las zonas de redundancia promedio insatisfactorias sugieren su densificación mediante un suficiente incremento de observaciones. Se utiliza a este efecto el parámetro:
i
iIN r0δ
µ = (125.6)

72
obtenido directamente de la expresion (124.6). Independientemente de σi, su variación relativa en cuanto menor sea, califica más favorablemente la homogeneidad de la red. Se prefieren valores absolutos pequeños que significan altas redundancias (ri ≈ 1). La fiabilidad interna de una red queda, por tanto, definida por los siguientes elementos: - Los números de redundancia, tanto en cada observación como la redundancia
media. - Los parámetros µINi de homogeneidad de la red. - Los valores ∇0i deducidos de (124.6), mínimo error detectable por el test con
potencia β y el nivel de significación α, o índices de sensibilidad de la red. Fiabilidad externa: Una buena y homogénea fiabilidad interna no garantiza automáticamente parámetros fiables. El objetivo de la fiabilidad externa es establecer la influencia de los errores deslizados o no detectados en las observaciones sobre los valores ajustados de los parámetros. Los parámetros estimados en presencia de un error groseros son, para el modelo de las ecuaciones de observación:
X = N+ATP(L - ei∇) (126.6) El efecto de un error grosero en la i-ésima observación es: ∇X = -N+ATPei∇i (127.6) Las variaciones ∇X se denominan fiabilidad local externa. El error grosero ∇i afecta, pues, a todos los parámetros. El impacto (influencia) del error mínimo detectable en los parámetros a través del ω-test con potencia β y nivel de significación α, ocasionado por un error grosero ∇i localizado en la i-ésima observación, es: ∇X0i = N+ATPei∇0i (128.6) Puesto que hay n observaciones, pueden computarse n vectores ∇X0i, mostrando el impacto de cada error mínimo detectable ∇0i sobre los parámetros. Baarda sugirió la siguiente expresión alternativa:
20
0020 σ
λ iT
ii
XNX ∇∇= (129.6)
Sustituyendo la expresión (128.6) en la (129.6):
20
0020
)()(σ
λ iiTT
iiT
i
PeANNPeAN ∇∇=
++

73
20
0020
)(σ
λ iiTT
iii
PeANNNPAe ∇∇=
++
Puesto que N+NN+ = N+:
20
0020 σ
λ iiTT
iii
PeANPAe ∇∇=
+
(130.6)
De la (76.6), AN+AT = I - QVP, entonces:
iiVT
iii ePQIPe 0020
20 )(1
∇−∇=σ
λ (131.6)
)(1 202
0
20 iV
Tii
Tiii PePQePee −∇=
σλ )(1 22
020
iiii qpp −∇=σ
)1(1 202
0
20 iiii rp −∇=
σλ
Y teniendo en cuenta la expresión (124.6):
20
220
20
1)1(σ
σδλi
iiii rrp −= (132.6)
De la definición de peso, 2
20
iip
σσ
= , sustituyendo en (132.6):
i
iii
iii rr
rr 1)1(1)1( 2
020
22
022
02
0 −=−= δσσ
σσδλ
Llamamos µEXi a la cantidad λ0i, entonces:
i
iiEX r
r−=
10δµ (133.6)
es el parámetro de homogeneidad de la fiabilidad externa, con una interpretación paralela a la de µINi. La fiabilidad externa de la red quedará definida por los siguientes elementos:
- Los vectores ∇X0i. - Los parámetros µEXi de homogeneidad de la red.
con análoga discusión e interpretación a la antes efectuada. La fiabilidad externa se refiere al máximo efecto producido por los minimos errores detectables ∇0i sobre los parámetros estimados. Este efecto o influencia está dado por la

74
(128.6). Puesto que hay n onservables pueden computarse n vectores ∇X0i, mostrando el efecto o influencia de cada minimo error detectable sobre todos los parámetros ajustados o estimados. Es deseable que el módulo del vector influencia total IT= ⎜⎜∇X0i⎜⎜sea menor que el error esférico radial medio estándar (EERMest.=
222ZYX σσσ ++ ); es decir, IT< EERMest.
Un criterio mas restrictivo es el siguiente: ⎜⎜∇X0i⎜⎜< DIE, donde DIE es la distancia desde el punto j-ésimo hasta la intersección n de la direccion del vector ∇X0i con el elipsoide de error estandar, según la figura siguiente: El sistema de referencia (j, XE, YE, ZE) está definido por los vectores propios de la submatriz diagonal de orden 3x3 (62.6), correspondiente a la estacion j-ésima en la matriz varianza covarianza ΣX=N+ de la solución mínimos cuadrados. La ecuación del elipsoide de error estandar en dicho sistema es:
12
2
2
2
2
2
=++cz
by
ax EEE (134.6)
Las componentes del vector influencia ∇X0i en el sistema (j, XE, YE, ZE), son: (∇X0i)E = (∇xE, ∇yE, ∇zE)T = Q ∇X0i (135.6) donde Q es una matriz 3x3 cuyas columnas son los vectores propios de la matriz (62.6). La ecuación de la recta que pasa por la estacion j-ésima y está dirigida por el vector (∇X0i)E, es:
Y
Z
X
Z E
YE
XE
a
bc
n
j
∇xOi

75
µ=∇
=∇
=∇ ZE
E
YE
E
XE
E zyx (136.6)
entonces: xE = µ∇xE; yE = µ∇yE; zE = µ∇zE (137.6) Reemplazando en (134.6).
12
2
2
2
2
22 =
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ ∇
+⎟⎠⎞
⎜⎝⎛ ∇
+⎟⎠⎞
⎜⎝⎛ ∇
cz
by
ax EEEµ
de donde:
2
2
2
2
2
2
1
⎟⎠⎞
⎜⎝⎛ ∇
+⎟⎠⎞
⎜⎝⎛ ∇
+⎟⎠⎞
⎜⎝⎛ ∇
=
cz
by
ax EEE
µ (138.6)
Haciendo K = ⎟⎠⎞
⎜⎝⎛ ∇
+⎟⎠⎞
⎜⎝⎛ ∇
+⎟⎠⎞
⎜⎝⎛ ∇
2
2
2
2
2 cz
by
ax EEE ; se tiene
K1
=µ y reemplazando en
(137.6), las coodenadas del punto intersección n, son:
Kxx E
n∇
= ; Kyy E
n∇
= ; Kzz E
n∇
= (139.6)
y la distancia intersección con el elipsoide estándar, es:
2221EEE zyx
KDIE ∇+∇+∇= (140.6)
7.- Ajuste de una Red GPS Real En las redes GPS, los parámetros a ajustar son las coordenadas tridimensionales de los vértices referidas al sistema geodésico absoluto WGS’84. Los observables son las componentes ∆X, ∆Y, ∆Z de los vectores GPS medidos entre los vértices de la red. Dichas componentes son variables estocásticas correlacionadas. Por cada vector GPS observado, existe una matriz varianza_covarianza definida por:
∑∆ = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
∆∆∆∆∆
∆∆∆∆∆
∆∆∆∆∆
ZYZXZ
ZYYXY
ZXYXX
2
2
2
σσσσσσσσσ

76
donde ∆ = [∆X, ∆Y, ∆Z]T es el vector GPS observado. Puede incluirse como observable el módulo del vector ∆: ∆ = 222 ZYX ∆+∆+∆ El módulo del vector ∆ es una función no lineal que debe linealizarse por un desarrollo en serie de Taylor. La varianza del módulo ∆, obtenida de la matriz varianza_covarianza ∑∆, es:
( ) ⎥⎦⎤
⎢⎣⎡ ∆∆+∆∆+∆∆+∆+∆+∆
∆= ∆∆∆∆∆∆∆∆∆∆ ZYZXYXZYX ZYZXYXZYX σσσσσσσ 222222
22
212
El error estándar especificado para el módulo ∆ observado es: (σ∆) = a + b ppm ∆(mm) donde a = 5 mm y b = 1 ppm son valores típicos para los receptores doble frecuencia. Es necesario definir un factor de escala FE, a fin de escalar correctamente la matriz varianza_covarianza ∑∆ :
( )
2
2
∆
∆=σσFE
La matriz varianza_covarianza escalada, es: (Σ∆) = FE Σ∆ Se ha desarrollado la siguiente aplicación MATALAB: REDGPS_ALV (ver anexo), que ajusta una red GPS, libre o vinculada, con componentes de un vector GPS correlacionadas. Datos: Matriz OGPS, almacena los códigos (origen y extremo) y las componentes ∆X, ∆Y, ∆Z de los vectores GPS observados. Matriz P0GPS, almacena la identificación de los puntos de la red GPS y sus coordenadas geodésicas WGS’84 aproximadas. Matriz QL, almacena las matrices varianza_covarianza a posteriori, producidas en el informe del procesamiento de cada vector GPS observado. Estas matrices se graban en planillas EXCEL y se transfieren a MATLAB. Por pantalla se ingresa:
- Valores a (mm) y b (ppm) para determinar el error estándar especificado (σ∆) de la línea base (módulo del vector GPS).
- Número de puntos fijos, identificación y errores estándar de sus coordenadas.
- Número de iteraciones. - Valores críticos chi _ cuadrado.
Salida por pantalla: - Redundancia de la red. - Residuos y varianza a posteriori - Resultados de la prueba chi _ cuadrado. - Coordenadas cartesianas tridimensionales ajustadas y sus errores
estándar.
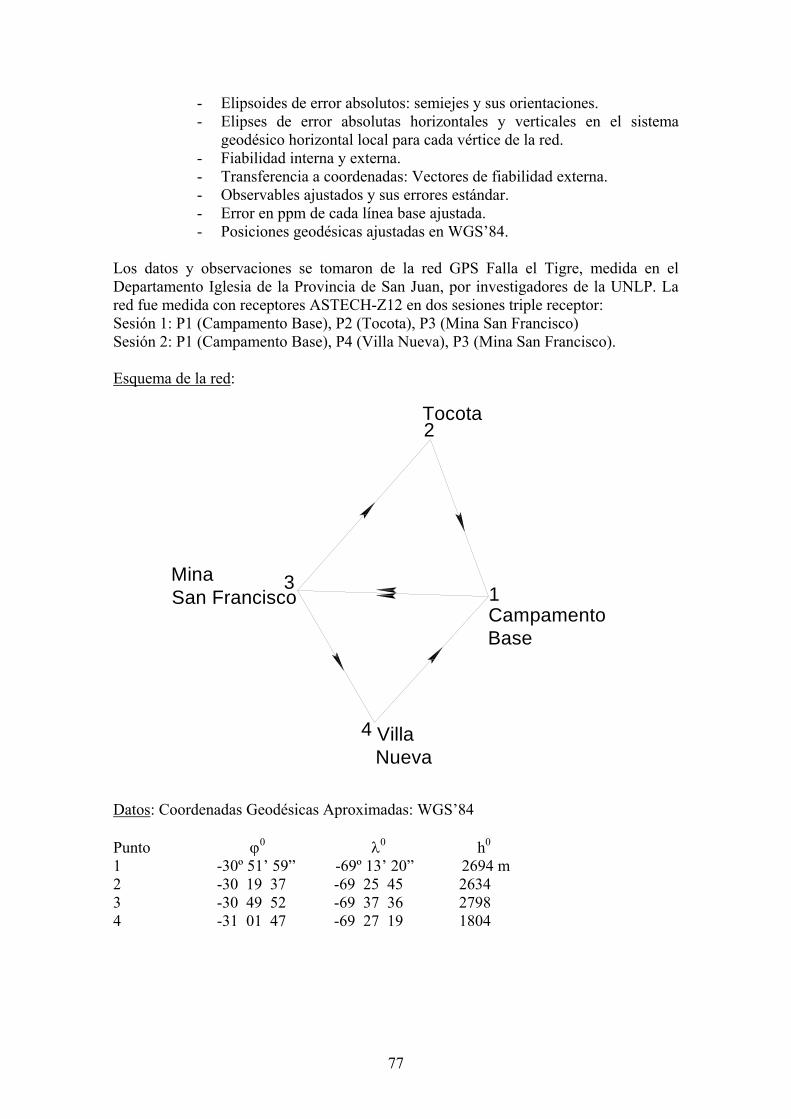
77
- Elipsoides de error absolutos: semiejes y sus orientaciones. - Elipses de error absolutas horizontales y verticales en el sistema
geodésico horizontal local para cada vértice de la red. - Fiabilidad interna y externa. - Transferencia a coordenadas: Vectores de fiabilidad externa. - Observables ajustados y sus errores estándar. - Error en ppm de cada línea base ajustada. - Posiciones geodésicas ajustadas en WGS’84.
Los datos y observaciones se tomaron de la red GPS Falla el Tigre, medida en el Departamento Iglesia de la Provincia de San Juan, por investigadores de la UNLP. La red fue medida con receptores ASTECH-Z12 en dos sesiones triple receptor: Sesión 1: P1 (Campamento Base), P2 (Tocota), P3 (Mina San Francisco) Sesión 2: P1 (Campamento Base), P4 (Villa Nueva), P3 (Mina San Francisco). Esquema de la red:
Datos: Coordenadas Geodésicas Aproximadas: WGS’84 Punto ϕ0 λ0 h0 1 -30º 51’ 59” -69º 13’ 20” 2694 m 2 -30 19 37 -69 25 45 2634 3 -30 49 52 -69 37 36 2798 4 -31 01 47 -69 27 19 1804
2
13
4
Tocota
Mina San Francisco
VillaNueva
Campamento Base

78
Componentes observadas y varianzas_covarianzas a priori: Vector Org. –Extr. ∆X (m) ∆Y (m) ∆Z (m) 1 2 - 1 14296.367 17820.999 -19.700.196 1.024 10-3 0 0 -1.295 10-3 3.249 10-3 0 -6.019 10-4 1.373 10-3 1.089 10-2
2 3 - 2 18070. 512 -3464.677 16362.982 1.960 10-4 0 0 -2.555 10-4 6.250 10-4 0 -1.254 10-4 2.840 10-4 2.560 10-4 3 1 - 3 -32366.915 -14356.244 3337.279 3.610 10-4 0 0 -4.651 10-4 1.156 10-3 0 -2.052 10-4 4.692 10-4 4.000 10-4
4 4 - 1 24254.657 -1642.671 15055.688 2.560 10-4 0 0 -3.078 10-4 1.369 10-3 0 -1.064 10-4 4.198 10-4 3.610 10-4
5 3 - 4 8112.244 15998.976 -18393.056 4.410 10-4 0 0 -2.587 10-4 3.316 10-3 0 -2.570 10-4 1.123 10-3 1.156 10-3 6 1 - 3 -32366.836 -14356.268 3337.355 6.760 10-4 0 0 -4.186 10-4 4.900 10-3 0 -3.749 10-4 1.702 10-3 1.697 10-3
Errores de Cierre: Malla I: Triangulo 1: ∑∆X = -0.036 m, ∑∆Y = 0.078 m, ∑∆Z = 0.065 m Triangulo 2: ∑∆X = 0.043 m, ∑∆Y = 0.054 m, ∑∆Z = 0.141 m σ ∑∆ = m062.013
232
221
2 =++ σσσ => Tol = 2.6 σ ∑∆ = 0.161 m
Triangulo 1: ε I, 1 = mZYX 108.0)()()( 21
21
21 =Σ∆+Σ∆+Σ∆ => ε I, 1 < Tol
Triangulo 2: ε I, 2 = mZYX 157.0))()( 22
22
22 =Σ∆+Σ∆+Σ∆ => ε I, 2 < Tol
Malla II: Triangulo 1: ∑∆X = -0.014 m, ∑∆Y = 0.061 m, ∑∆Z = - 0.089 m Triangulo 2: ∑∆X = 0.065 m, ∑∆Y = 0.037 m, ∑∆Z = - 0.013 m
061.0142
342
132 =++=Σ∆ σσσσ => Tol = 2.6 m158.0=Σ∆σ
Triangulo 1: ε II, 1 = 0.109 m => ε II, 1 < Tol
79
Triangulo 2: ε II, 2 = 0.076 m => ε II, 2 < Tol Ambas mallas cierran dentro de tolerancia. Ajuste Libre Correlacionado y Control de Calidad: Se ejecutó con la aplicación MATLAB REDGPS_ALV:
- Número de observaciones: 6 vectores, 18 componentes => n = 24 - Número de parámetros: 4 puntos = > m = 12 - Número de grados de libertad de la red: d = 3 (tres traslaciones en X,
Y, Z) - Redundancia: ν = n – m + d = 24 -12 + 3 =15 - Número de iteraciones: 4 - Varianza a posteriori: 0251.12
0 =σ) , pasa la prueba chi _ cuadrado al 95% de confianza con valores críticos: χ2 15, 0.025 = 6.26, χ2
15, 0.975 = 27.5. Error estándar de la línea base en el ajuste: σ LB = 5 mm + 0.88 ppm
Errores estandar de las coordenadas ajustadas
Punto σX(m) σY(m) σZ(m) EERMest.(m) 1 0.0096 0.0216 0.0158 0.0284 2 0.0119 0.0244 0.0196 0.0335 3 0.0104 0.0232 0.0152 0.0296 4 0.0128 0.0319 0.0195 0.0396 Elipsoides de error del 95% de confianza ( 29.305.0
15,3 =F ) Pto A(m) ψº θº B(m) ψº θº C(m) ψº θº EERM Vol(cm3) 1 0.078 107.7 28.3 0.038 279.8 61.5 0.022 15.9 3.3 0.089 274.523 2 0.093 110.8 32.9 0.042 283.7 56.9 0.026 18.7 3.2 0.105 432.281 3 0.085 107.2 28.2 0.030 256.2 58.0 0.025 9.5 13.9 0.093 262.510 4 0.113 102.6 26.4 0.041 234.0 53.1 0.033 359.9 23.8 0.124 642.338 Σ = 1611.652 A, B, C son los semiejes mayor, intermedio y menor del elipsoide del 95% de confianza, mientras que ψ y θ son sus respectivos rumbos y elevaciones.
Elipses de Error Horizontales del 95% N-E (FM = 2.71) Punto ϕº A (m) B (m) excentr. área (cm2) 1 -5.91 0.0326 0.0195 0.6435 19.96 2 -3.73 0.0367 0.0227 0.6186 26.19 3 -19.99 0.0259 0.0216 0.3055 17.60 4 -38.95 0.0371 0.0294 0.3721 34.21 ∑ = 1.9397 ∑ = 97.93

80
Elipses de Error Verticales del 95% N-n (FM =2.71) Punto ϕº A (m) B (m) excentr. área (cm2) 1 -2.34 0.0671 0.0324 0.7665 68.29 2 2.43 0.0798 0.0365 0.7903 91.64 3 -2.40 0.0729 0.0253 0.8797 57.98 4 -4.04 0.0964 0.0336 0.8783 101.92 ∑ = 3.3149 ∑ = 319.83 Elipses de Error Verticales del 95% E-n (FM =2.71) Punto ϕº A (m) B (m) excentr. área (cm2) 1 2.66 0.0671 0.0194 0.7665 40.96 2 -0.13 0.0798 0.0228 0.9186 57.02 3 2.83 0.0730 0.0219 0.9100 50.18 4 7.04 0.0969 0.0306 0.9001 93.22 ∑ = 3.6448 ∑ = 241.38 Varianza Singular Media: σ2
SM = 0.0015 m2 Desv. Estándar Singular Media: σSM = 0.0387 m Fiabilidad: Índices de sensibilidad de la red: α = 0.05, β0 = 0.20. Potencia de test: β = 1 - β0 = 0.80 Parámetro de desplazamiento: δ0 = 2.80 Obs. vi(m) ωi ri ⎜∇0i⎜(m)∆X 2-1 -0.0049 -1.5249 0.1715 0.071 ∆Y 2-1 -0.0029 -0.7729 0.1091 0.158 ∆Z 2-1 -0.0598 -1.4432 0.7444 0.156 ∆X 3-2 -0.0021 -0.6090 0.7498 0.080 ∆Y 3-2 -0.0201 0.0276 0.5257 0.144 ∆Z 3-2 -0.0330 -1.2435 0.4554 0.121 ∆X1-3 0.0430 0.6797 0.9246 0.115 ∆Y1-3 -0.0551 -0.6851 0.8275 0.188 ∆Z1-3 0.0278 1.3640 0.7803 0.138 ∆X1-4 -0.0198 0.08512 0.6919 0.100 ∆Y1-4 -0.0129 -1.4079 0.6810 0.199 ∆Z1-4 0.0390 1.7148 0.4887 0.132 ∆X3-4 -0.0092 -0.4565 0.2734 0.096 ∆Y3-4 0.0070 -0.4576 0.5066 0.170 ∆Z3-4 0.0222 1.0515 0.3613 0.113 ∆X1-3 -0.0360 -1.9534 0.6996 0.095 ∆Y1-3 -0.0311 0.2347 0.8101 0.204 ∆Z1-3 -0.0482 -1.6437 0.7205 0.104 ∆2-1 0.0350 1.2916 0.7399 0.104 ∆3-2 -0.0207 -0.9504 0.6659 0.093
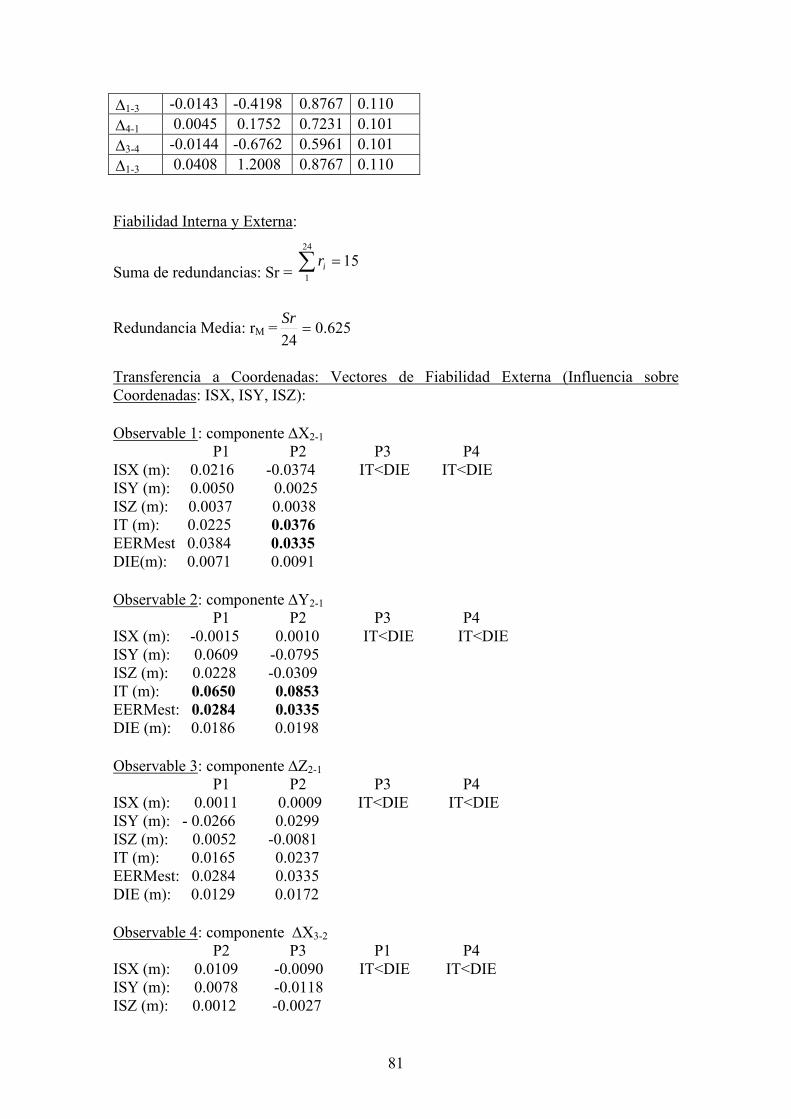
81
∆1-3 -0.0143 -0.4198 0.8767 0.110 ∆4-1 0.0045 0.1752 0.7231 0.101 ∆3-4 -0.0144 -0.6762 0.5961 0.101 ∆1-3 0.0408 1.2008 0.8767 0.110 Fiabilidad Interna y Externa:
Suma de redundancias: Sr = 15
24
1=∑ ir
Redundancia Media: rM = 625.024
=Sr
Transferencia a Coordenadas: Vectores de Fiabilidad Externa (Influencia sobre Coordenadas: ISX, ISY, ISZ): Observable 1: componente ∆X2-1 P1 P2 P3 P4 ISX (m): 0.0216 -0.0374 IT<DIE IT<DIE ISY (m): 0.0050 0.0025 ISZ (m): 0.0037 0.0038 IT (m): 0.0225 0.0376 EERMest 0.0384 0.0335 DIE(m): 0.0071 0.0091 Observable 2: componente ∆Y2-1 P1 P2 P3 P4 ISX (m): -0.0015 0.0010 IT<DIE IT<DIE ISY (m): 0.0609 -0.0795 ISZ (m): 0.0228 -0.0309 IT (m): 0.0650 0.0853 EERMest: 0.0284 0.0335 DIE (m): 0.0186 0.0198 Observable 3: componente ∆Z2-1 P1 P2 P3 P4 ISX (m): 0.0011 0.0009 IT<DIE IT<DIE ISY (m): - 0.0266 0.0299 ISZ (m): 0.0052 -0.0081 IT (m): 0.0165 0.0237 EERMest: 0.0284 0.0335 DIE (m): 0.0129 0.0172 Observable 4: componente ∆X3-2 P2 P3 P1 P4 ISX (m): 0.0109 -0.0090 IT<DIE IT<DIE ISY (m): 0.0078 -0.0118 ISZ (m): 0.0012 -0.0027

82
IT (m): 0.0135 0.0151 EERMest: 0.0335 0.0296 DIE (m): 0.0087 0.0098 Observable 5: componente ∆Y3-2 P1 P2 P3 P4 ISX (m): -0.0006 0.0007 -0.0007 IT<DIE ISY (m): 0.0227 -0.0333 -0.0350 ISZ (m): 0.0083 -0.0077 -0.0022 IT (m): 0.0241 0.0342 0.0351 EERMest: 0.0284 0.0335 0.0296 DIE (m): 0.0186 0.0147 0.0158 Observable 6: componente ∆Z3-2 P1 P2 P3 P4 ISX (m): IT<DIE -0.0050 0.0045 0.0025 ISY (m): 0.0038 -0.0029 0.0005 ISZ (m): 0.0423 -0.0234 -0.0157 IT (m): 0.0428 0.0240 0.0159 EERMest: 0.0335 0.0296 0.0396 DIE (m): 0.0164 0.0115 0.0140 Observable 7: componente ∆X1-3 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE IT<DIE IT<DIE ISY (m): ISZ (m): IT (m): EERMest: DIE (m): Observable 8: componente ∆Y1-3 P1 P2 P3 P4 ISX (m): 0.0004 IT<DIE 0.0000 IT<DIE ISY (m): -0.0158 0.0166 ISZ (m): 0.0026 0.0004 IT (m): 0.0160 0.0166 EERMest: 0.0284 0.0296 DIE (m): 0.0147 0.0154 Observable 9: componente ∆Z1-3 P1 P2 P3 P4 ISX (m): 0.0011 IT<DIE -0.0017 IT<DIE ISY (m): -0.0004 0.0035 ISZ (m): -0.0168 0.0135 IT (m): 0.0168 0.0140 EERMest: 0.0284 0.0296 DIE (m): 0.0134 0.0123

83
Observable 10: componente ∆X4-1 P1 P2 P3 P4 ISX (m): 0.0119 IT<DIE IT<DIE -0.0187 ISY (m): -0.0010 -0.0059 ISZ (m): -0.0031 0.0022 IT (m): 0.0124 0.0197 EERMest: 0.0284 0.0396 DIE (m): 0.0079 0.0113 Observable 11: componente ∆Y4-1 P1 P2 P3 P4 ISX (m): 0.0009 0.0014 IT<DIE -0.0187 ISY (m): 0.0232 0.0195 -0.0042 ISZ (m): -0.0053 0.0042 -0.0010 IT (m): 0.0238 0.0200 0.0404 EERMest: 0.0284 0.0335 0.0396 DIE (m): 0.0136 0.0166 0.0216 Observable 12: componente ∆Z4-1 P1 P2 P3 P4 ISX (m): -0.0053 IT<DIE IT<DIE 0.0088 ISY (m): 0.0099 -0.0167 ISZ (m): 0.0309 -0.0366 IT (m): 0.0328 0.0412 EERMest: 0.0284 0.0396 DIE (m): 0.0157 0.0190 Observable 13: componente ∆X3-4 P1 P2 P3 P4 ISX (m): IT<DIE -0.0097 -0.0274 0.0420 ISY (m): 0.0011 0.0159 -0.0147 ISZ (m): 0.0046 0.0038 -0.0030 IT (m): 0.0108 0.0319 0.0446 EERMest: 0.0335 0.0296 0.0396 DIE (m): 0.0093 0.0107 0.0123 Observable 14: componente ∆Y3-4 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE 0.0036 -0.0053 ISY (m): -0.0283 0.0554 ISZ (m): -0.0029 0.0056 IT (m): 0.0286 0.0559 EERMest: 0.0296 0.0396 DIE (m): 0.0181 0.0258

84
Observable 15: componente ∆Z3-4 P1 P2 P3 P4 ISX (m): IT<DIE -0.0011 -0.0014 0.0022 ISY (m): -0.0031 -0.0104 0.0154 ISZ (m): -0.0174 -0.0281 0.0443 IT (m): 0.0177 0.0300 0.0470 EERMest: 0.0335 0.0296 0.0396 DIE (m): 0.0160 0.0123 0.0159 Observable 16: componente ∆X1-3 P1 P2 P3 P4 ISX (m): -0.0135 IT<DIE 0.0150 IT<DIE ISY (m): 0.0165 -0.0157 ISZ (m): 0.0029 -0.0060 IT (m): 0.0215 0.0225 EERMest: 0.0284 0.0296 DIE (m): 0.0145 0.0149 Observable 17: componente ∆Y1-3 P1 P2 P3 P4 ISX (m): 0.0043 IT<DIE -0.0044 IT<DIE ISY (m): -0.0193 0.0195 ISZ (m): 0.0029 0.0010 IT (m): 0.0200 0.0200 EERMest: 0.0284 0.0296 DIE (m): 0.0167 0.0176 Observable 18: componente ∆Z1-3 P1 P2 P3 P4 ISX (m): -0.0009 IT<DIE 0.0006 IT<DIE ISY (m): 0.0012 0.0026 ISZ (m): -0.0193 0.0151 IT (m): 0.0193 0.0153 EERMest: 0.0284 0.0296 DIE (m): 0.0127 0.0111 Observable 19: línea base ∆2-1 P1 P2 P3 P4 ISX (m): 0.0002 -0.0027 IT<DIE IT<DIE ISY (m): 0.0044 -0.0003 ISZ (m): -0.0143 0.0206 IT (m): 0.0150 0.0208 EERMest: 0.0284 0.0335 DIE (m): 0.0122 0.0155

85
Observable 20: línea base ∆3-2 P1 P2 P3 P4 ISX (m): IT<DIE 0.0096 -0.0077 IT<DIE ISY (m): -0.0081 0.0050 ISZ (m): 0.0167 -0.0080 IT (m): 0.0209 0.0122 EERMest: 0.0335 0.0296 DIE (m): 0.0123 0.0087 Observable 21: línea base ∆1-3 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE IT<DIE IT<DIE ISY (m): ISZ (m): IT (m): EERMest: DIE (m): Observable 22: línea base ∆4-1 P1 P2 P3 P4 ISX (m): 0.0091 IT<DIE IT<DIE -0.0133 ISY (m): -0.0051 0.0019 ISZ (m): 0.0077 -0.0084 IT (m): 0.0129 0.0158 EERMest: 0.0284 0.0396 DIE (m): 0.0094 0.0107 Observable 23: línea base ∆3-4 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE -0.0020 0.0032 ISY (m): -0.0162 0.0358 ISZ (m): 0.0043 -0.0054 IT (m): 0.0169 0.0364 EERMest: 0.0296 0.0396 DIE (m): 0.0119 0.0188 Observable 24: línea base ∆1-3 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE IT<DIE IT<DIE ISY (m): ISZ (m): IT (m): EERMest: DIE (m):

86
Observaciones Ajustadas y sus Errores Estándar.
vec ∆X(m) σ∆X ∆Y(m) σ∆Y ∆Z(m) σ∆Z ∆(m) σ∆
2-1 14296.362 0.01 17820.966 0.02 -19700.256 0.03 30167.432 0.02
3-2 18070.510 0.02 -3464.697 0.04 16362.949 0.03 24623.029 0.02
1-3 -32366.872 0.02 -14356.299 0.04 3337.307 0.03 35564.805 0.01
4-1 24254.637 0.02 -1642.684 0.05 15055.727 0.03 28594.768 0.02
3-4 8112.235 0.02 15998.983 0.04 -18393.034 0.03 25692.012 0.02
1-3 -32366.872 0.02 -14356.299 0.04 3337.307 0.03 35564.805 0.01
Errores de las Líneas Base en parte por millón:
lin. base 2-1 3-2 1-3 4-1 3-4 1-3
err. ppm 0.540 0.634 0.363 0.562 0.692 0.363
Comentarios sobre el Ajuste Libre Correlacionado y el Control de Calidad:
- Según los valores de los semiejes mayores de las elipses de error del 95% de confianza, los puntos con mayor precisión en el posicionamiento horizontal y vertical, son el 1 y el 3. Esto es así, porque a ellos llegan cuatro vectores GPS, mientras que al 2 y al 4 llegan solamente 2 vectores.
- Los parámetros ωi de Baarda se mantienen, en todos los casos, menores en valor absoluto, que el valor crítico t15, 0975 = 2.13. En consecuencia, no se rechaza ninguna observación.
- Las observaciones de componentes están bien controladas (0.4 ≤ ri ≤ 1), salvo las componentes ∆X2-1, ∆Y2-1, ∆X3-4 y ∆Z3-4 que están débilmente controladas (0.1 ≤ ri ≤ 0.4). Las distancias (líneas base) están todas bien controladas. La redundancia media es igual a 0.625; esto califica, en promedio, a la red como bien controlada.
- Los errores mínimos detectados | ∇0i | para las componentes, varían entre 0.071 m y 0.204 m. Los mínimos errores detectables se determinaron para un nivel de significación α = 0.05 y para una potencia de test 1 – β0 = 0.80. Esto significa que no se rechazará una observación correcta con probabilidad del 95% y aquellos posibles errores groseros serán detectados con una potencia de test igual al 80%, lo que implica que sólo un 20% podrán filtrarse en el ajuste sin ser detectados.
- Los vectores de fiabilidad externa indican que un error no detectado en alguna observación, produce una influencia no mayor que 0.085 m en las coordenadas ajustadas. La influencia total IT, supera al error esférico radial medio estándar, EERMest, en aquellos casos en que el númerode redundancia r es menor que 0.55.

87
- El ajuste libre supera la prueba chi _ cuadrado para la varianza a posteriori al 95% de confianza habiéndose modelado los errores externos con 0.88 ppm. Los errores estándar de los observables ajustados indican un error promedio de 0.526 ppm.
- Según los estándares geodésicos del CNUGGI, la red GPS es categoría B1, puesto que las distancias están comprendidas entre los 10 km y los 100 km, y los semiejes mayores de las elipses horizontales del 95% de confianza, son menores que 0.04 m en todos los casos. Los semiejes no superan el radio de tolerancia, que es igual a 0.10 m.
Ajuste Vinculado Correlacionado: Se ejecutó con la aplicación MATLB REDGPS_ALV. Se adoptó como punto fijo al Campamento Base (P1) con las siguientes coordenadas rectangulares: X1 = 1944529.018 m Y1 = -5125442.034 m Z1 = -3254580.807 m provenientes de una campaña Transit realizada por el IGMA en el año 1982. Errores a priori de las coordenadas: La red se ha fijado en el punto 1 dándole al mismo un error irrealísticamente pequeño de 1 mm. De esta manera el peso de las coordenadas “fijas” es 106 y el punto 1 es prácticamente fijo. El número de observaciones es ahora n = 27, el número de coordenadas o parámetros a ajustar es m = 12 y el número de grados de libertad de la red es r = 0. El error de la línea base ∆ se modeló con el error estándar especificado: (σ∆) = 5 mm + 0.75 ppm ∆(mm). Luego de cuatro iteraciones, la varianza a posteriori 0279.12
0 =σ) , pasó la prueba chi _ cuadrado al 95% de confianza. Coordenadas Cartesianas Ajustadas y sus Errores Estándar:
pto. X(m) σX(m) Y(m) σY(m) Z(m) σZ(m)
1PF 1944592.02 0.001 -5125442.03 0.001 -3254580.81 0.001
2 1930232.66 0.014 -5143263.03 0.025 -3234880.55 0.027
3 1912162.15 0.017 -5139798.33 0.038 -3251243.50 0.026
4 1920274.38 0.020 -5123799.35 0.049 -3269636.53 0.029
Posiciones Geodésicas Ajustadas:
pto. ϕ º ‘ “ λ º ’ “ h(m)
1 -30 51 59.43763 -69 13 25.95750 2693.807
2 -30 39 36.95646 -69 25 45.18586 2607.551
3 -30 49 52.22923 -69 35 35.73581 2747.330
4 -31 01 47.07275 -69 27 18.84055 1778.758

88
Ajuste Libre No- Correlacionado y Control de Calidad: En este caso se anulan la covarianzas en la (2.6) para cada vector GPS; es decir, σ∆X∆Y = σ∆X∆Z = σ ∆Y∆Z = 0 y se consideran solamente las varianzas σ2
∆X, σ2∆Y, σ2
∆Z de las componentes. Se ejecutó con la aplicación MATLAB REDGPS_ALV:
- Número de observaciones: 6 vectores, 18 componentes => n = 24 - Número de parámetros: 4 puntos = > m = 12 - Número de grados de libertad de la red: d = 3 (tres traslaciones en X,
Y, Z) - Redundancia: ν = n – m + d = 24 -12 + 3 =15 - Número de iteraciones: 4 - Varianza a posteriori: 0355.12
0 =σ) , pasa la prueba chi _ cuadrado al 95% de confianza con valores críticos: χ2 15, 0.025 = 6.26, χ2
15, 0.975 = 27.5. Error estándar de la línea base en el ajuste: σ LB = 5 mm + 0.92 ppm
Errores estandar de las coordenadas ajustadas
Punto σX(m) σY(m) σZ(m) EERMest.(m) 1 0.0077 0.0169 0.0133 0.0228 2 0.0096 0.0191 0.0159 0.0266 3 0.0076 0.0165 0.0104 0.0210 4 0.0099 0.0236 0.0141 0.0293 Elipsoides de error del 95% de confianza ( 29.305.0
15,3 =F ) Pto A(m) ψº θº B(m) ψº θº C(m) ψº θº EERM Vol(cm3) 1 0.054 94.5 11.8 0.041 267.3 78.1 0.024 4.2 1.5 0.072 221.278 2 0.062 92.2 22.5 0.048 256.1 66.7 0.030 359.8 5.8 0.084 370.253 3 0.052 94.2 9.2 0.032 240.4 78.9 0.024 3.2 6.1 0.066 166.031 4 0.075 91.8 10.8 0.043 234.8 76.6 0.031 0.3 7.9 0.092 418.027 Σ = 1175.589 A, B, C son los semiejes mayor, intermedio y menor del elipsoide del 95% de confianza, mientras que ψ y θ son sus respectivos rumbos y elevaciones.
Elipses de Error Horizontales del 95% N-E (FM = 2.71) Punto ϕº A (m) B (m) excentr. área (cm2) 1 -14.45 0.0370 0.0225 0.6302 26.40 2 -19.20 0.0418 0.0283 0.5416 37.13 3 -24.42 0.0315 0.0213 0.5428 21.02 4 -30.41 0.0432 0.0285 0.5648 38.68 ∑ = 2.2794 ∑ = 123.01

89
Elipses de Error Verticales del 95% N-n (FM =2.71) Punto ϕº A (m) B (m) excentr. área (cm2) 1 -16.96 0.0450 0.0353 0.3834 49.87 2 -3.00 0.0516 0.0405 0.3831 65.61 3 -20.23 0.0439 0.0276 0.6053 37.96 4 -18.49 0.0622 0.0367 0.6518 71.61 ∑ = 2.0236 ∑ = 225.05 Elipses de Error Verticales del 95% E-n (FM =2.71) Punto ϕº A (m) B (m) excentr. área (cm2) 1 15.17 0.0455 0.0212 0.7818 24.79 2 16.18 0.0531 0.0272 0.7368 45.41 3 15.89 0.0435 0.0208 0.7704 28.50 4 18.28 0.0626 0.0278 0.8029 54.66 ∑ = 3.0919 ∑ = 158.89 Fiabilidad: Índices de sensibilidad de la red: α = 0.05, β0 = 0.20. Potencia de test: β = 1 - β0 = 0.80 Parámetro de desplazamiento: δ0 = 2.80 Obs. vi(m) ωi ri ⎜∇0i⎜(m)∆X 2-1 -0.0045 -0.6882 0.2303 0.080 ∆Y 2-1 -0.0153 -1.2951 0.2399 0.140 ∆Z 2-1 -0.0604 -1.6212 0.7146 0.149 ∆X 3-2 0.0015 0.0723 0.6734 0.088 ∆Y 3-2 -0.0279 -0.8137 0.5628 0.173 ∆Z 3-2 -0.0300 -1.4862 0.4803 0.120 ∆X1-3 0.0389 1.3094 0.8465 0.100 ∆Y1-3 -0.0348 -0.6870 0.7655 0.189 ∆Z1-3 0.0254 0.9045 0.6824 0.117 ∆X1-4 -0.0222 -0.8764 0.7381 0.098 ∆Y1-4 -0.0287 -0.4957 0.7186 0.229 ∆Z1-4 0.0472 1.7141 0.6199 0.127 ∆X3-4 -0.0027 -0.4394 0.2086 0.086 ∆Y3-4 0.0025 0.0996 0.4384 0.162 ∆Z3-4 0.0163 1.2425 0.3499 0.107 ∆X1-3 -0.0401 -1.7237 0.7710 0.086 ∆Y1-3 -0.0108 -0.1654 0.8449 0.221 ∆Z1-3 -0.0506 -1.3548 0.7912 0.134 ∆2-1 0.0283 1.0468 0.6829 0.113 ∆3-2 -0.0149 -0.6661 0.6535 0.096 ∆1-3 -0.0190 -0.5485 0.8432 0.117 ∆4-1 0.0077 0.2859 0.7389 0.104 ∆3-4 -0.0110 -0.5133 0.5619 0.109 ∆1-3 0.0361 1.0416 0.8432 0.117

90
Fiabilidad Interna y Externa:
Suma de redundancias: Sr = 15
24
1=∑ ir
Redundancia Media: rM = 625.024
=Sr
Transferencia a Coordenadas: Vectores de Fiabilidad Externa (Influencia sobre Coordenadas: ISX, ISY, ISZ): Observable 1: componente ∆X2-1 P1 P2 P3 P4 ISX (m): 0.0238 -0.0379 IT<DIE IT<DIE ISY (m): -0.0074 -0.0005 ISZ (m): 0.0019 0.0022 IT (m): 0.0250 0.0379 EERMest 0.0228 0.0266 DIE(m): 0.0081 0.0096 Observable 2: componente ∆Y2-1 P1 P2 P3 P4 ISX (m): -0.0027 0.0011 IT<DIE IT<DIE ISY (m): 0.0443 -0.0622 ISZ (m): 0.0096 -0.0134 IT (m): 0.0454 0.0636 EERMest: 0.0228 0.0266 DIE (m): 0.0171 0.0194 Observable 3: componente ∆Z2-1 P1 P2 P3 P4 ISX (m): 0.0005 0.0005 IT<DIE IT<DIE ISY (m): 0.0020 -0.0053 ISZ (m): 0.0184 -0.0241 IT (m): 0.0185 0.0246 EERMest: 0.0228 0.0162 DIE (m): 0.0133 0.0172 Observable 4: componente ∆X3-2 P2 P3 P1 P4 ISX (m): 0.0167 -0.0121 IT<DIE IT<DIE ISY (m): -0.0013 0.0021 ISZ (m): -0.0043 0.0026 IT (m): 0.0173 0.0126 EERMest: 0.0266 0.0210 DIE (m): 0.0100 0.0079

91
Observable 5: componente ∆Y3-2 P1 P2 P3 P4 ISX (m): -0.0015 -0.0005 0.0017 0.0003 ISY (m): 0.0181 0.0414 -0.0341 -0.0253 ISZ (m): -0.0013 0.0052 -0.0024 -0.0015 IT (m): 0.0182 0.0417 0.0343 0.0254 EERMest: 0.0228 0.0266 0.0210 0.0293 DIE (m): 0.0167 0.0192 0.0166 0.0235 Observable 6: componente ∆Z3-2 P1 P2 P3 P4 ISX (m): IT<DIE -0.0040 0.0032 0.0028 ISY (m): 0.0078 -0.0051 -0.0024 ISZ (m): 0.0409 -0.0213 -0.0163 IT (m): 0.0419 0.0221 0.0167 EERMest: 0.0266 0.0210 0.0293 DIE (m): 0.0162 0.0107 0.0142 Observable 7: componente ∆X1-3 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE IT<DIE IT<DIE ISY (m): ISZ (m): IT (m): EERMest: DIE (m): Observable 8: componente ∆Y1-3 P1 P2 P3 P4 ISX (m): 0.0016 IT<DIE -0.0014 IT<DIE ISY (m): -0.0225 0.0218 ISZ (m): -0.0014 0.0015 IT (m): 0.0226 0.0219 EERMest: 0.0228 0.0210 DIE (m): 0.0170 0.0166 Observable 9: componente ∆Z1-3 P1 P2 P3 P4 ISX (m): 0.0008 IT<DIE -0.0008 IT<DIE ISY (m): -0.0025 0.0028 ISZ (m): -0.0219 0.0154 IT (m): 0.0221 0.0156 EERMest: 0.0228 0.0210 DIE (m): 0.0133 0.0106

92
Observable 10: componente ∆X4-1 P1 P2 P3 P4 ISX (m): 0.0107 IT<DIE IT<DIE -0.0149 ISY (m): -0.0026 0.0025 ISZ (m): -0.0020 0.0029 IT (m): 0.0111 0.0154 EERMest: 0.0228 0.0293 DIE (m): 0.0080 0.0103 Observable 11: componente ∆Y4-1 P1 P2 P3 P4 ISX (m): -0.0013 IT<DIE IT<DIE 0.0009 ISY (m): 0.0258 -0.0387 ISZ (m): 0.0014 -0.0043 IT (m): 0.0258 0.0390 EERMest: 0.0224 0.0293 DIE (m): 0.0170 0.0238 Observable 12: componente ∆Z4-1 P1 P2 P3 P4 ISX (m): -0.0017 IT<DIE IT<DIE 0.0028 ISY (m): 0.0044 -0.0076 ISZ (m): 0.0229 -0.0252 IT (m): 0.0234 0.0265 EERMest: 0.0228 0.0293 DIE (m): 0.0135 0.0148 Observable 13: componente ∆X3-4 P1 P2 P3 P4 ISX (m): IT<DIE -0.0118 -0.0248 0.0429 ISY (m): -0.0003 0.0071 -0.0047 ISZ (m): -0.0026 -0.0011 -0.0019 IT (m): 0.0121 0.0258 0.0432 EERMest: 0.0266 0.0210 0.0293 DIE (m): 0.0096 0.0078 0.0100 Observable 14: componente ∆Y3-4 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE 0.0015 -0.0015 ISY (m): -0.0296 0.0612 ISZ (m): -0.0056 0.0096 IT (m): 0.0302 0.0620 EERMest: 0.0210 0.0293 DIE (m): 0.0167 0.0239

93
Observable 15: componente ∆Z3-4 P1 P2 P3 P4 ISX (m): IT<DIE -0.0000 -0.0007 -0.0010 ISY (m): -0.0067 -0.0091 0.0197 ISZ (m): -0.0177 -0.0254 0.0442 IT (m): 0.0189 0.0269 0.0484 EERMest: 0.0266 0.0210 0.0293 DIE (m): 0.0167 0.0109 0.0154 Observable 16: componente ∆X1-3 P1 P2 P3 P4 ISX (m): -0.0099 IT<DIE 0.0097 IT<DIE ISY (m): 0.0034 -0.0033 ISZ (m): 0.0006 -0.0013 IT (m): 0.0105 0.0103 EERMest: 0.0228 0.0210 DIE (m): 0.0082 0.0081 Observable 17: componente ∆Y1-3 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE IT<DIE IT<DIE ISY (m): ISZ (m): IT (m): EERMest: DIE (m): Observable 18: componente ∆Z1-3 P1 P2 P3 P4 ISX (m): 0.0006 IT<DIE -0.0006 IT<DIE ISY (m): -0.0019 0.0021 ISZ (m): -0.0165 0.0116 IT (m): 0.0166 0.0118 EERMest: 0.0228 0.0210 DIE (m): 0.0133 0.0106 Observable 19: línea base ∆2-1 P1 P2 P3 P4 ISX (m): 0.0016 -0.0045 IT<DIE IT<DIE ISY (m): 0.0088 -0.0113 ISZ (m): -0.0138 0.0184 IT (m): 0.0164 0.0221 EERMest: 0.0228 0.0266 DIE (m): 0.0132 0.0151

94
Observable 20: línea base ∆3-2 P1 P2 P3 P4 ISX (m): IT<DIE 0.0092 -0.0067 IT<DIE ISY (m): -0.0051 0.0057 ISZ (m): 0.0205 -0.0104 IT (m): 0.0230 0.0137 EERMest: 0.0266 0.0210 DIE (m): 0.0130 0.0094 Observable 21: línea base ∆1-3 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE IT<DIE IT<DIE ISY (m): ISZ (m): IT (m): EERMest: DIE (m): Observable 22: línea base ∆4-1 P1 P2 P3 P4 ISX (m): 0.0078 IT<DIE IT<DIE -0.0105 ISY (m): -0.0029 0.0027 ISZ (m): 0.0106 -0.0108 IT (m): 0.0135 0.0153 EERMest: 0.0228 0.0293 DIE (m): 0.0102 0.0109 Observable 23: línea base ∆3-4 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE -0.0009 0.0033 ISY (m): -0.0168 0.0351 ISZ (m): 0.0070 -0.0126 IT (m): 0.0182 0.0375 EERMest: 0.0210 0.0293 DIE (m): 0.0137 0.0191 Observable 24: línea base ∆1-3 P1 P2 P3 P4 ISX (m): IT<DIE IT<DIE IT<DIE IT<DIE ISY (m): ISZ (m): IT (m): EERMest: DIE (m):

95
Observaciones Ajustadas y sus Errores Estándar.
vec ∆X(m) σ∆X ∆Y(m) σ∆Y ∆Z(m) σ∆Z ∆(m) σ∆
2-1 14296.363 0.01 17820.984 0.02 -19700.256 0.02 30167.425 0.02
3-2 18070.514 0.02 -3464.705 0.03 16362.952 0.02 24623.035 0.02
1-3 -32366.876 0.01 -14356.279 0.03 3337.304 0.02 35564.805 0.02
4-1 24254.635 0.02 -1642.700 0.04 15055.735 0.02 28594.768 0.02
3-4 8112.241 0.01 15998.978 0.03 -18393.040 0.02 25692.012 0.02
1-3 -32366.876 0.01 -14356.279 0.03 3337.304 0.02 35564.805 0.02
Errores de las Líneas Base en parte por millón:
lin. base 2-1 3-2 1-3 4-1 3-4 1-3
err. ppm 0.622 0.673 0.427 0.569 0.751 0.427
Comentarios sobre el Ajuste Libre No-Correlacionado y el Control de Calidad:
- Según los valores de los semiejes mayores de las elipses de error del 95% de confianza, los puntos con mayor precisión en el posicionamiento horizontal y vertical, son el 1 y el 3. Esto es así, porque a ellos llegan cuatro vectores GPS, mientras que al 2 y al 4 llegan solamente 2 vectores.
- Los parámetros ωi de Baarda se mantienen, en todos los casos, menores en valor absoluto, que el valor crítico t15, 0975 = 2.13. En consecuencia, no se rechaza ninguna observación.
- Las observaciones de componentes están bien controladas (0.4 ≤ ri ≤ 1), salvo las componentes ∆X2-1, ∆Y2-1, ∆X3-4 y ∆Z3-4 que están débilmente controladas (0.1 ≤ ri ≤ 0.4). Las distancias (líneas base) están todas bien controladas. La redundancia media es igual a 0.625; esto califica, en promedio, a la red como bien controlada.
- Los errores mínimos detectados | ∇0i | para las componentes, varían entre 0.081 m y 0.229 m. Los mínimos errores detectables se determinaron para un nivel de significación α = 0.05 y para una potencia de test 1 – β0 = 0.80. Esto significa que no se rechazará una observación correcta con probabilidad del 95% y aquellos posibles errores groseros serán detectados con una potencia de test igual al 80%, lo que implica que sólo un 20% podrán filtrarse en el ajuste sin ser detectados.
- Los vectores de fiabilidad externa indican que un error no detectado en
alguna observación, produce una influencia total no mayor que 0.063 m en las coordenadas ajustadas. La influencia total IT, supera al error esférico radial medio estándar, EERMest, en aquellos casos en que el númerode redundancia r es menor que 0.56.

96
- El ajuste libre no-correlacionado supera la prueba chi _ cuadrado para la varianza a posteriori al 95% de confianza habiéndose modelado los errores externos con 0.92 ppm. Los errores estándar de los observables ajustados indican un error promedio de 0.578 ppm.
- Según los estándares geodésicos del CNUGGI, la red GPS es categoría B1, puesto que las distancias están comprendidas entre los 10 km y los 100 km, y los semiejes mayores de las elipses horizontales del 95% de confianza, son menores que 0.04 m en todos los casos. Los semiejes no superan el radio de tolerancia, que es igual a 0.10 m.
Ajuste Vinculado No-Correlacionado: Se ejecutó con la aplicación MATLB REDGPS_ALV tras anular las covarianzas de las componentes de los vectores GPS. Se adoptó como punto fijo al Campamento Base (P1) con las siguientes coordenadas rectangulares: X1 = 1944529.018 m Y1 = -5125442.034 m Z1 = -3254580.807 m provenientes de una campaña Transit realizada por el IGMA en el año 1982. Errores a priori de las coordenadas: La red se ha fijado en el punto 1 dándole al mismo un error irrealísticamente pequeño de 1 mm. De esta manera el peso de las coordenadas “fijas” es 106 y el punto 1 es prácticamente fijo. El número de observaciones es ahora n = 27, el número de coordenadas o parámetros a ajustar es m = 12 y el número de grados de libertad de la red es r = 0. El error de la línea base ∆ se modeló con el error estándar especificado: (σ∆) = 5 mm + 0.92 ppm ∆(mm). Luego de cuatro iteraciones, la varianza a posteriori 0279.12
0 =σ) , pasó la prueba chi _ cuadrado al 95% de confianza. Coordenadas Cartesianas Ajustadas y sus Errores Estándar:
pto. X(m) σX(m) Y(m) σY(m) Z(m) σZ(m)
1PF 1944592.02 0.001 -5125442.03 0.001 -3254580.81 0.001
2 1930232.66 0.012 -5143263.02 0.021 -3234880.55 0.024
3 1912162.14 0.013 -5139798.31 0.029 -3251243.50 0.020
4 1920274.38 0.015 -5123799.37 0.037 -3269636.54 0.022
Posiciones Geodésicas Ajustadas:
pto. ϕ º ‘ “ λ º ’ “ h(m)
1PF -30 51 59.43763 -69 13 25.95750 2693.807
2 -30 39 36.95664 -69 25 45.18570 2607.540
3 -30 49 52.22964 -69 35 35.73568 2747.313
4 -31 01 47.07321 -69 27 18.84026 1778.750

97
Los resultados de los ajustes correlacionados y no correlacionados, tanto libres como vinculados, no difieren significativamente. En muchos casos se obtienen resultados satisfactorios desestimando las covarianzas entre las componentes de los vectores GPS. 8.- Diseño de Redes GPS Básicamente el problema del diseño implica decisiones sobre el número y posición de las estaciones y también sobre la selección de los observables y su precisión. La calidad de una red geodésica se caracteriza por su precisión, fiabilidad y costo. En otras palabras, una red geodésica debería ser diseñada en tal forma que:
- la precisión postulada de los elementos de la red pueda lograrse - sea sensible ante los tests estadísticos utilizados para la detección de errores
groseros en las observaciones y resistente ante los errores groseros no detectados.
- La monumentación y ejecución de las mediciones satisfaga algún criterio de costos.
En general, una red que satisfaga al mismo tiempo todos los requerimientos para máxima precisión, alta fiabilidad y mínimo costo, puede no necesariamente existir. Sin embargo, puede lograrse una solución satisfactoria para un problema de diseño, balanceando los requerimientos de los tres criterios. El objetivo consiste, precisamente, en lograr un diseño satisfactorio de una red GPS por el método” prueba y error” asistido por computadora. El método “prueba y error” consiste en los siguientes pasos (Kuang, Shanlong 1996): 1.- Especificación de criterios de precisión y fiabilidad: elipsoides de error a un nivel de significación α, errores estándar de las coordenadas y parámetros de fiabilidad interna y externa. 2.- Selección de un esquema de observación: estaciones, observaciones y pesos. 3.- Cálculo de la matriz varianza-covarianza de los estimadores mínimos cuadrados y obtención de los valores de las cantidades especificadas como criterios de precisión y fiabilidad. 4.- Si los valores del paso 3 están próximos a los especificados en el paso 1, entonces se continúa con el próximo paso. En caso contrario, se vuelve al paso 2 modificando posiciones relativas de puntos, remodelando pesos y agregando o quitando observables hasta obtener en el paso 3 los valores deseados de precisión y fiabilidad. 5.- Se computa el costo de la red y se considera la posibilidad de retornar al paso 2 y recomenzar el proceso con un diseño de red completamente diferente, si el costo resulta excesivo. La aplicación MATLAB, REDGPS_DNC1, ejecuta los pasos del diseño sin tener en cuenta las correlaciones entre los observables (las componentes de los vectores GPS) puesto que su modelación a priori resulta muy dificultosa. Los datos de entrada son las coordenadas geodésicas aproximadas de los puntos de la red y los orígenes y extremos de los vectores GPS codificados con los identificadores numéricos de los puntos de la red. Esta información se introduce en MATLAB mediante planillas EXCEL. Se construye la matriz de diseño A, considerando ecuaciones de observación para componentes y para líneas base. Para construir la matriz de los pesos P, se introducen

98
por pantalla los valores a en milímetros y b en partes por millón obtenidos de algún estándar geodésico, FGCS 1988 por ejemplo, que permiten estimar el error estándar de una línea base y los errores estándar de las componentes para modelar los pesos de los observables. La matriz P es diagonal debido a la desestimación de las covarianzas de las componentes. La matriz varianza covarianza de la solución mínimos cuadrados, denotada por ΣX, es igual a la pseudoinversa Moore-Penrose de la matriz normal N = ATPA y se obtiene mediante los valores propios y vectores propios normalizados de la matriz normal N. Entonces ΣX = N+. Los semiejes del elipsoide de error del 95% de confianza y sus orientaciones respecto del sistema geodésico geocéntrico absoluto se obtienen de la matriz ΣX. Los semiejes de las elipses de error del 95% de confianza y sus orientaciones respecto de los ejes n, e y h de los planos coordenados del sistema geodésico horizontal local centrado en cada estación, también se obtienen de la matriz ΣX, previa transformación de coordenadas efectuada con los valores de latitud y longitud geodesicas en cada punto de la red. Se ingresa por pantalla el parámetro de desplazamiento o no-centralidad de una distribución gaussiana, calculado en función de los índices de sensibilidad de la red α y β; es decir las probabilidades de un error de tipo I y tipo II, respectivamente. Se calculan ahora los parámetros de fiabilidad siguiendo la teoría de Baarda (1968) (Leick, Alfred 1995); es decir los números de redundancia ri, los mínimos errores detectables ⎢∇0i⎢y los parámetros de fiabilidad interna µINi y de fiabilidad externa µEXi para cada observable. El vector de fiabilidad externa ∇X0i, permite calcular las influencias del mínimo error detectable de cada observable sobre las coordenadas ajustadas de los puntos de la red. Si ISXj, ISYj, ISZj son las componentes del vector de fiabilidad externa ∇X0i correspondiente al i-ésimo observable, el módulo del vector (ISXj, ISYj, ISZj)T, se denomina la influencia total del mínimo error detectable ⎢∇0i⎢del i-ésimo observable sobre el punto j y se denota por ITj , así: 2 2 2
j j j jIT ISX ISY ISZ= + + El error esférico radial medio estándar, EERMest., en cada punto de la red, se calcula en función de los errores estándar σX, σY, σZ de sus coordenadas; es decir,
2 2 2. X Y ZEERMest σ σ σ= + + . Consideramos que una red geodésica es de fiabilidad satisfactoria si la influencia total IT es menor que el error esférico radial medio estándar, EERMest., en todos sus puntos. La DIE, es la distancia entre el centro del elipsoide de error estándar y el punto de intersección de la dirección del vector influencia total IT con el elipsoide estándar. Un criterio más restrictivo para calificar la fiabilidad de la red, consiste en la condición de que la influencia total, sea menor que la distancia de intersección con el elipsoide estándar (IT<DIE). En ese caso el vector de influencia estaría totalmente contenido dentro del elipsoide de error estándar en cada punto de la red. Vamos a ejecutar ahora el diseño de la red propuesta en la seccion 7 (7.- Ajuste de una Red GPS Real), con los siguientes postulados de precisión:
i) El semieje mayor del elipsoide de error de 95% de confianza en cada estación, no debe superar los 0.05 m (A ≤ 0.05 m).
ii) El error esférico radial medio calculado con los smiejes del elipsoide del 95% de conianza, no debe superar los 0.10m (EERM ≤ 0.10m).

99
Seleccionamos el error estandar para una línea base: σ∆ = 5mm + 1 ppm ∆(mm) y consideramos los seis vectores GPS originales que conectan las cuatro estaciones de la red. Se obtienen así, los resultados siguientes: Elipsoides de error del 95% de confianza ( 29.305.0
15,3 =F ) Pto. A(m) ψº θº B(m) ψº θº C(m) ψº θº EERM(m) Vol.(cm3) 1 0.056 110.0 31.2 0.047 217.8 26.7 0.047 160.0 -46.7 0.087 524.099 2 0.110 110.8 30.6 0.106 20.7 0.1 0.080 110.5 -59.4 0.173 3939.205 3 0.054 111.4 31.3 0.047 13.4 13.0 0.043 263.7 55.5 0.084 463.764 4 0.065 110.5 32.4 0.058 201.0 0.8 0.051 292.2 57.6 0.100 794.393
Σ = 5721.461 Este diseño no resulta satisfactorio puesto que no se cumplen los postulados de precisión especificados en i) y ii). Intentaremos un nuevo diseño probando con σ∆ = 4.08 mm + 0.51 ppm ∆(mm) obtenido del Federal Geodetic Control Subcomitee (FGCS 1988), Estandares Geométricos en Posicionamiento Relativo para Levantamientos Tri-Dimensionales, Sistema de Referencia Geodésico Nacional, Red Secundaria, orden B (nivel de confianza 95% error base en centímetros, 0.5 y error dependiente de la línea base 1; es decir 1:1000000). Se obtienen así, los siguientes resultados: Elipsoides de error del 95% de confianza ( 29.305.0
15,3 =F ) Pto. A(m) ψº θº B(m) ψº θº C(m) ψº θº EERM(m) Vol.(cm3) 1 0.030 110.0 31.2 0.026 13.9 9.9 0.026 268.4 56.9 0.047 83.756 2 0.059 110.8 30.6 0.057 20.7 0.2 0.043 110.3 -59.4 0.092 600.302 3 0.029 111.4 31.3 0.026 13.4 12.5 0.024 261.1 54.8 0.046 74.201 4 0.036 110.5 32.4 0.032 201.0 0.8 0.028 292.3 57.6 0.055 132.163
Σ = 890.722 Este diseño no resulta satisfactorio puesto que los semijes A y B del elipsoide del 95% de confianza en el punto 2, no cumplen aún con el postulado i). Probamos ahora insertando el vector 2-4 y conservando el estándar anterior para el error de una línea base (σ∆ = 4.08 mm + 0.51 ppm ∆(mm)). Se tienen siete vectores y cuatro estaciones; habida cuenta que se trata de un diseño de red libre, la redundancia es ν = 19. Se obtienen así los siguientes resultados: Elipsoides de error del 95% de confianza ( 13.305.0
15,3 =F ) Pto. A(m) ψº θº B(m) ψº θº C(m) ψº θº EERM(m) Vol.(cm3) 1 0.029 109.9 31.4 0.025 253.6 53.7 0.024 9.7 16.2 0.045 71.656 2 0.050 110.7 30.7 0.048 20.9 -0.3 0.036 111.4 -59.3 0.078 355.071 3 0.028 111.5 31.6 0.024 7.0 22.2 0.022 248.1 49.8 0.043 63.352 4 0.031 110.5 32.5 0.028 201.4 1.5 0.024 193.8 57.5 0.048 85.205
Σ = 575.284 Se cumplen así, los postulados de precisión: i) y ii). Varianza Singular Media: VSM = 0.00032472 m2. Desviación Estándar Singular Media: DESM = 0.018 m

100
Analizaremos ahora las elipses de error y los parámetros de fiabilidad interna y externa. Elipses de Error Horizontales del 95% N-E (FM = 2.654) Punto ϕº A (m) B (m) excentr. área (cm2) 1 -19.55 0.0215 0.0207 0.0739 13.97 2 0.42 0.0416 0.0308 0.4512 40.36 3 -25.77 0.0211 0.0194 0.1568 12.85 4 1.74 0.0240 0.0207 0.2541 15.59 ∑ = 0.9360 ∑ = 82.77 Elipses de Error Verticales del 95% N-n (FM =2.654) Punto ϕº A (m) B (m) excentr. área (cm2) 1 0.63 0.0250 0.0214 0.2659 16.81 2 0.39 0.0429 0.0308 0.4822 41.55 3 0.86 0.0240 0.0197 0.3264 14.88 4 1.44 0.0266 0.0207 0.3962 17.32 ∑ = 1.4707 ∑ = 90.56 Elipses de Error Verticales del 95% E-n (FM =2.71) Punto ϕº A (m) B (m) excentr. área (cm2) 1 0.77 0.0250 0.0208 0.3084 16.31 2 -0.13 0.0429 0.0416 0.0566 56.08 3 -1.05 0.0240 0.0208 0.2512 15.69 4 0.11 0.0266 0.0240 0.1903 20.05 ∑ = 0.8065 ∑ = 108.14 Fiabilidad: Indices de sensibilidad de la red: α = 0.05, β = 0.80, δ0 = 2.80 Observable ri ⎜∇0i⎜(m) µINi µEXi ∆X 2-1 0.6437 0.126 3.4899 2.0831∆Y 2-1 0.6509 0.126 3.4705 2.0504∆Z 2-1 0.7342 0.118 3.2679 1.6849∆X 3-2 0.5963 0.122 3.6259 2.3038∆Y 3-2 0.6042 0.121 3.6022 2.2663∆Z 3-2 0.7055 0.112 3.3337 1.8092∆X 1-3 0.7878 0.070 3.1547 1.4533∆Y 1-3 0.6972 0.075 3.3535 1.8455∆Z 1-3 0.6982 0.075 3.3510 1.8410∆X 4-1 0.6201 0.067 3.5557 2.1916∆Y 4-1 0.4775 0.076 4.0520 2.9289∆Z 4-1 0.5402 0.071 3.8098 2.5834∆X 3-4 0.5012 0.068 3.9553 2.7936∆Y 3-4 0.4708 0.070 4.0805 2.9683∆Z 3-4 0.5265 0.066 3.8589 2.6554

101
∆X 1-3 0.7878 0.070 3.1547 1.4533∆Y 1-3 0.6972 0.075 3.3535 1.8455∆Z 1-3 0.6982 0.075 3.3510 1.8410∆X 2-4 0.7389 0.143 3.2573 1.6644∆Y 2-4 0.7476 0.142 3.2384 1.6270∆Z 2-4 0.8115 0.1363 3.1082 1.3495∆ 2-1 0.7695 0.116 3.1918 1.5323∆ 3-2 0.7497 0.109 3.2338 1.6180∆ 1-3 0.8084 0.070 3.1142 1.3632∆ 4-1 0.6528 0.065 3.4656 2.0421∆ 3-4 0.6292 0.061 3.5292 2.1493∆ 1-3 0.8084 0.070 3.1142 1.3632∆ 2-4 0.8468 0.133 3.0428 1.1919 Σ = 19 RM = 0.6786 Transferencia a Coordenadas: Vectores de Fiabilidad Externa Observable 1: ∆X 2-1. r = 0.6437 Punto1 Punto 2 ISX(m) 0.0138 -0.0312 ISY(m) -0.0007 -0.0007 ISZ(m) -0.0006 0.0024 IT(m) 0.0139 0.0313 EERMest(m) 0.0147 0.0253 DIE(m) 0.0080 0.0157 Observable 2: ∆Y 2-1. r = 0.6509 Punto1 Punto 2 ISX(m) -0.0005 -0.0005 ISY(m) 0.0147 -0.0291 ISZ(m) 0.0027 -0.0066 IT(m) 0.0150 0.0299 EERMest(m) 0.0147 0.0253 DIE(m) 0.0091 0.0156 Observable 3: ∆Z 2-1. r = 0.7342 Punto1 Punto 2 ISX(m) -0.0009 0.0019 ISY(m) 0.0024 -0.0063 ISZ(m) 0.0114 -0.0201 IT(m) 0.0117 0.0211 EERMest(m) 0.0147 0.0253 DIE(m) 0.0086 0.0136 Observable 4: ∆X 3-2. r = 0.5693 Punto1 Punto 2 Punto 3 ISX(m) -0.0098 0.0343 -0.0150 ISY(m) -0.0005 0.0010 0.0002

102
ISZ(m) 0.0005 -0.0031 0.0013 IT(m) 0.0099 0.0345 0.0151 EERMest(m) 0.0147 0.0253 0.0141 DIE(m) 0.0079 0.0157 0.0080 Observable 5: ∆Y 3-2. r = 0.6042 Punto2 Punto 3 ISX(m) 0.0011 0.0004 ISY(m) 0.0325 -0.0155 ISZ(m) 0.0072 -0.0029 IT(m) 0.0333 0.0158 EERMest(m) 0.0253 0.0141 DIE(m) 0.0153 0.0086 Observable 6: ∆Z 3-2. r = 0.7055 Punto2 Punto 3 ISX(m) -0.0031 0.0010 ISY(m) 0.0065 -0.0028 ISZ(m) 0.0218 -0.0113 IT(m) 0.0229 0.0117 EERMest(m) 0.0253 0.0141 DIE(m) 0.0137 0.0081 Observable 7: ∆X 1-3. r = 0.7878 IT < DIE Observable 8: ∆Y 1-3. r = 0.6972 Punto1 Punto 3 ISX(m) 0.0017 -0.0018 ISY(m) -0.0120 0.0107 ISZ(m) -0.0007 0.0011 IT(m) 0.0121 0.0109 EERMest(m) 0.0147 0.0141 DIE(m) 0.0090 0.0086 Observable 9: ∆Z 1-3. r = 0.6982 Punto1 Punto 3 ISX(m) 0.0003 0.0003 ISY(m) -0.0007 0.0011 ISZ(m) -0.0119 0.0106 IT(m) 0.0120 0.0107 EERMest(m) 0.0147 0.0141 DIE(m) 0.0084 0.0079 Observable 10: ∆X 4-1. r = 0.6201 Punto1 Punto 4 ISX(m) 0.0108 -0.0145 ISY(m) -0.0010 0.0008 ISZ(m) -0.0022 0.0019 IT(m) 0.0111 0.0146 EERMest(m) 0.0147 0.0156

103
DIE(m) 0.0081 0.0091 Observable 11: ∆Y 4-1. r = 0.4775 Punto1 Punto 4 ISX(m) -0.0017 0.0003 ISY(m) 0.0189 -0.0207 ISZ(m) 0.0011 -0.0030 IT(m) 0.0191 0.0209 EERMest(m) 0.0147 0.0156 DIE(m) 0.0098 0.0095 Observable 12: ∆Z 4-1. r = 0.5402 Punto1 Punto 4 ISX(m) -0.0016 0.0028 ISY(m) -0.0013 -0.0025 ISZ(m) 0.0163 -0.0165 IT(m) 0.0165 0.0169 EERMest(m) 0.0147 0.0156 DIE(m) 0.0085 0.0087 Observable 13: ∆X 3-4. r = 0.5012 Punto3 Punto 4 ISX(m) -0.0149 0.0190 ISY(m) -0.0026 -0.0012 ISZ(m) -0.0013 -0.0007 IT(m) 0.0152 0.0191 EERMest(m) 0.0141 0.0156 DIE(m) 0.0081 0.0091 Observable 14: ∆Y 3-4. r = 0.4708 Punto3 Punto 4 ISX(m) 0.0022 -0.0018 ISY(m) -0.0165 0.0206 ISZ(m) -0.0036 0.0043 IT(m) 0.0170 0.0313 EERMest(m) 0.0141 0.0253 DIE(m) 0.0087 0.0096 Observable 1: ∆X 2-1. r = 0.6437 Punto1 Punto 2 ISX(m) 0.0138 -0.0312 ISY(m) -0.0007 -0.0007 ISZ(m) -0.0006 0.0024 IT(m) 0.0139 0.0313 EERMest(m) 0.0147 0.0253 DIE(m) 0.0080 0.0157

104
Observable 15: ∆Z 3-4. r = 0.5265 Punto3 Punto 4 ISX(m) -0.0006 0.0000 ISY(m) -0.0031 0.0044 ISZ(m) -0.0146 0.0168 IT(m) 0.0149 0.0174 EERMest(m) 0.0141 0.0156 DIE(m) 0.0081 0.0087 Observable 16: ∆X 1-3. r = 0.7878 IT < DIE Observable 17: ∆Y 1-3. r = 0.6972 Punto1 Punto 3 ISX(m) 0.0017 -0.0018 ISY(m) -0.0120 0.0107 ISZ(m) -0.0007 0.0011 IT(m) 0.0121 0.0109 EERMest(m) 0.0147 0.0141 DIE(m) 0.0090 0.0086 Observable 18: ∆Z 1-3. r = 0.6982 Punto1 Punto 3 ISX(m) 0.0003 0.0003 ISY(m) -0.0007 0.0011 ISZ(m) -0.0119 0.0106 IT(m) 0.0120 0.0107 EERMest(m) 0.0147 0.0141 DIE(m) 0.0084 0.0079 Observable 19: ∆X 2-4. r = 0.7389 Punto2 Punto 4 ISX(m) -0.0246 0.0127 ISY(m) 0.0006 0.0000 ISZ(m) 0.0020 -0.0011 IT(m) 0.0247 0.0127 EERMest(m) 0.0253 0.0156 DIE(m) 0.0157 0.0090 Observable 20: ∆Y 2-4. r = 0.7476 Punto2 Punto 4 ISX(m) -0.0007 0.0000 ISY(m) -0.0232 0.0127 ISZ(m) -0.0052 0.0026 IT(m) 0.0237 0.0129 EERMest(m) 0.0253 0.0156 DIE(m) 0.0080 0.0096

105
Observable 21: ∆Z 2-4. r = 0.8115 Punto2 Punto 4 ISX(m) 0.0020 -0.0010 ISY(m) -0.0049 0.0025 ISZ(m) -0.0167 0.0095 IT(m) 0.0171 0.0098 EERMest(m) 0.0253 0.0156 DIE(m) 0.0136 0.0088 Observable 22: ∆ 2-1. r = 0.7695 Punto1 Punto 2 ISX(m) 0.0020 -0.0053 ISY(m) 0.0056 -0.0101 ISZ(m) 0.0098 0.0177 IT(m) 0.0147 0.0253 EERMest(m) 0.0147 0.0253 DIE(m) 0.0081 0.0123 Observable 23: ∆ 3-2. r = 0.7497 Punto2 Punto 3 ISX(m) 0.0101 -0.0050 ISY(m) -0.0049 0.0029 ISZ(m) 0.0140 -0.0077 IT(m) 0.0180 0.0096 EERMest(m) 0.0253 0.0141 DIE(m) 0.0121 0.0076 Observable 24: ∆ 1-3. r = 0.8084 IT < DIE Observable 25: ∆ 4-1. r = 0.6528 Punto1 Punto 4 ISX(m) 0.0083 -0.0107 ISY(m) -0.0011 0.0004 ISZ(m) 0.0059 -0.0062 IT(m) 0.0103 0.0123 EERMest(m) 0.0147 0.0156 DIE(m) 0.0078 0.0085 Observable 26: ∆ 3-4. r = 0.6292 Punto1 Punto 2 ISX(m) -0.0026 0.0044 ISY(m) -0.0062 0.0079 ISZ(m) 0.0073 -0.0088 IT(m) 0.0099 0.0126 EERMest(m) 0.0141 0.0156 DIE(m) 0.0073 0.0084 Observable 27: ∆ 1-3. r = 0.8084 IT < DIE
106
Observable 28: ∆ 2-4. r = 0.8468 Punto2 ISX(m) 0.0029 ISY(m) -0.0061 ISZ(m) -0.0109 IT(m) 0.0128 EERMest(m) 0.0253 DIE(m) 0.0116 Comentarios: -En aquellos observables cuyos números de redundancia son menores o iguales que 0.65 (r ≤ 0.65) el módulo del vector influencia total IT, supera al error esférico radial medio estándar EERMest. (IT > EERMest.). Los números de redundancia elevados garantizan la fiabilidad de la red. -Solamente para la componente ∆X1-3 y la línea base ∆1-3, cuyos números de redundancia son muy elevados (aproximadamente 0.8), la influencia total IT no supera a la distancia de intersección con el elipsoide DIE; es decir, IT ≤ DIE en los cuatro puntos o estaciones de la red. No obstante, puede considerarse como satisfactorio este diseño. -Cuando se tiene una red de mayor envergadura; es decir, con un número considerable de estaciones, es conveniente comenzar el diseño con una malla triangular. Generalmente algunos puntos periféricos no cumplen los postulados de precisión establecidos. Se agregan entonces, vectores que vinculen a dichos puntos entre sí, hasta lograr un diseño satisfactorio. El número de triangulos que conforman la red, puede obtenerse en forma aproximada por la expresión nt = -1.6017 + 0.8092 ne + 0.0375 ne2, donde nt es el número de triangulos y ne es el número de estaciones de la red. El número de vectores del diseño inicial es, aproximadamente nv = -2.6017 + 1.8092 ne + 0.0375 ne2. Conclusiones: El diseño de redes geodésicas es una parte importante de la mayoría de los proyectos geodésicos y de ingeniería. La etapa del diseño es anterior a la etapa de la medición. Un diseño satisfactorio redunda en una disminución de costos y tiempos de ejecución en campaña. Uno de los criterios descriptos para caracterizar la calidad de una red geodésica es la fiabilidad. Esta puede entenderse como la capacidad de la red para detectar y eliminar errores groseros en las observaciones. Una red geodésica es de alta fiabilidad si puede detectar los mínimos posibles errores groseros. Para alcanzar este objetivo es necesario que los números de redundancia tengan valores próximos a la unidad (preferentemente 0.6 < ri < 1). En consecuencia, la influencia de los errores no detectados sobre las coordenadas ajustadas será mínima y permanecerá, en la mayoría de los casos acotada por el error esférico radial medio estándar y por el elipsoide estándar mismo, en cada punto de la red.

107
9.- ANEXO
Se presenta el listado de la aplicación MATLAB, REDGPS_ALV con la que se efectuó el cálculo y compensación de la red GPS real de la sección 7: REDGPS_ALV clear home disp(' ') disp(' ') disp(' Programa REDGPS_ALV: Ajusta una Red GPS LIBRE resolviendo el Sistema de Ecuaciones') disp(' de Observación, por la descomposición SVD,adaptada para matrices simétricas.') disp(' Los códigos,vectores GPS y factores de pesos se almacenan en la matríz OGPS.') disp(' Las coordenadas aproximadas se almacenan en la matríz P0GPS.') disp(' Muestra coordenadas ajustadas y sus errores estándar, elipses de error absolutas') disp(' al 95% de confianza horizontales (N-E) y verticales (V-.N y V-E), fiabilidad') disp(' interna y externa, observables ajustados y sus errores estándard.') disp(' -RAUL A. MARQUEZ-') % Carga de Datos: Posiciones Geodésicas Aproximadas (P0GPS)-Vectores GPS (OGPS) y Varianzas- % covarianzas a posteriori(QL). load P0GPS.mat; load OGPS.mat; load QL.mat; nv=length(OGPS(:,1)); n=3*nv+nv; npt=length(P0GPS(:,1)); m=3*npt; P=zeros(n,n); format short disp(' ') disp(' *INGRESE a y b en mm,según el ESTANDAR correspondiente*') disp(' ') a=input(' a = '); disp(' ') b=input(' b = '); disp(' ') % Genera la matriz P de los pesos. icuen=0; nql=3*nv-2; for i=1:3:nql icuen=icuen+1; QL(i,2)=QL(i+1,1); QL(i,3)=QL(i+2,1); QL(i+1,3)=QL(i+2,2); Q(1,1)=QL(i,1); Q(1,2)=QL(i,2); Q(1,3)=QL(i,3); Q(2,1)=QL(i+1,1); Q(2,2)=QL(i+1,2); Q(2,3)=QL(i+1,3); Q(3,1)=QL(i+2,1); Q(3,2)=QL(i+2,2); Q(3,3)=QL(i+2,3);

108
DX=OGPS(icuen,3); DY=OGPS(icuen,4); DZ=OGPS(icuen,5); DS2=DX^2+DY^2+DZ^2; T1=0.5*(DX^2*Q(1,1)+DY^2*Q(2,2)+DZ^2*Q(3,3)); T2=DX*DY*Q(1,2)+DX*DZ*Q(1,3)+DY*DZ*Q(2,3); ST2=2*(T1+T2)/DS2; SR2=((a+b*0.001*sqrt(DS2))/1000)^2; FP=SR2/ST2; FP Q Q=FP*Q; QINV=pinv(Q); QINV pause PAX(i,1)=QINV(1,1); PAX(i,2)=QINV(1,2); PAX(i,3)=QINV(1,3); PAX(i+1,1)=QINV(2,1); PAX(i+1,2)=QINV(2,2); PAX(i+1,3)=QINV(2,3); PAX(i+2,1)=QINV(3,1); PAX(i+2,2)=QINV(3,2); PAX(i+2,3)=QINV(3,3); end dpz=0; for i=1:3:nql for j=0:2 for k=1:3 P(i+j,k+dpz)=PAX(i+j,k); end end dpz=dpz+3; end for i=1:nv SD=sqrt(OGPS(i,3)^2+OGPS(i,4)^2+OGPS(i,5)^2); P(3*nv+i,3*nv+i)=1/((a+b*0.001*SD)/1000)^2; end % Calcula las componentes aproximadas y las almacena en la matriz AGPS. AGPS=zeros(npt,3); A=zeros(n,m); disp(' ') aa=6378137; e2=0.00669438; for i=1:npt FIG=-P0GPS(i,2); FIM=-P0GPS(i,3); FIS=-P0GPS(i,4); ALG=-P0GPS(i,5); ALM=-P0GPS(i,6); ALS=-P0GPS(i,7); h = P0GPS(i,8); FI=(FIG+FIM/60+FIS/3600)*pi/180; AL=(ALG+ALM/60+ALS/3600)*pi/180; gn=aa/sqrt(1-e2*sin(FI)^2); AGPS(i,1)=(gn+h)*cos(FI)*cos(AL); AGPS(i,2)=(gn+h)*cos(FI)*sin(AL); AGPS(i,3)=(gn*(1-e2)+h)*sin(FI); end

109
% Ingresa puntos Fijos y sus Pesos.- np=input(' *Cuántos Puntos Fijos? '); disp(' ') if np>0 for k=1:np npf=input(' *Identifique Punto Fijo* '); pf(k)=npf; end disp(' ') for k=1:length(pf) disp(' *Punto '),disp(pf(k)) XF(pf(k))=input(' *XF= '); PXF(pf(k))=input('*Peso '); disp(' ') YF(pf(k))=input(' *YF= '); PYF(pf(k))=input('*Peso '); disp(' ') ZF(pf(k))=input(' *ZF= '); PZF(pf(k))=input('*Peso '); A(n+3*k-2,3*pf(k)-2)=1; A(n+3*k-1,3*pf(k)-1)=1; A(n+3*k,3*pf(k)) =1; disp(' ') end for kk=1:length(pf) P(n+3*kk-2,n+3*kk-2)=PXF(pf(kk)); P(n+3*kk-1,n+3*kk-1)=PYF(pf(kk)); P(n+3*kk,n+3*kk) =PZF(pf(kk)); end end disp(' AUTOVALORES DE LA MATRIZ DE LOS PESOS') Y=eig(P); naa=0; for i=1:n if Y(i) < 0 naa=naa+1; end end disp(' ¿Cuántos autovalores negativos?') naa disp(' ') NIT=input(' Cuántas Iteraciones? '); disp(' ') % Parámetros del elipsoide global(WGS'84).- AA=6378137; F=1/298.2572221; E2=2*F-F^2; EP2=E2/((AA^2)*(1-E2)); % Arma la matríz de diseño A.Comienza proceso iterativo.- NCUEN=0; while NCUEN<=NIT NCUEN=NCUEN+1; disp(' ') disp(' Iteración ');disp( NCUEN ) disp(' ') pause for k=1:nv i =OGPS(k,1); j =OGPS(k,2);

110
DX=OGPS(k,3); DY=OGPS(k,4); DZ=OGPS(k,5); SD=sqrt(DX^2+DY^2+DZ^2); % Matríz de diseño A.- A(3*k-2,3*i-2)=-1; A(3*k-1,3*i-1)=-1; A(3*k,3*i) =-1; A(3*k-2,3*j-2)= 1; A(3*k-1,3*j-1)= 1; A(3*k,3*j) = 1; A(3*nv+k,3*i-2)=-(DX/SD); A(3*nv+k,3*i-1)=-(DY/SD); A(3*nv+k,3*i) =-(DZ/SD); A(3*nv+k,3*j-2)= (DX/SD); A(3*nv+k,3*j-1)= (DY/SD); A(3*nv+k,3*j) = (DZ/SD); DX0=AGPS(j,1)-AGPS(i,1); DY0=AGPS(j,2)-AGPS(i,2); DZ0=AGPS(j,3)-AGPS(i,3); LT(3*k-2) =(DX-DX0); LT(3*k-1) =(DY-DY0); LT(3*k) =(DZ-DZ0); LT(3*nv+k)=(SD-sqrt(DX0^2+DY0^2+DZ0^2)); end if np>0 for kk=1:length(pf) LT(n+3*kk-2)=(XF(pf(kk))-AGPS(pf(kk),1)); LT(n+3*kk-1)=(YF(pf(kk))-AGPS(pf(kk),2)); LT(n+3*kk) =(ZF(pf(kk))-AGPS(pf(kk),3)); end end N=A'*P*A; [V,D]=eig(N); disp(' AUTOVALORES DE A´*P*A') format short e Y=sort(diag(D)) format %QX=pinv(N); LT=LT'; tol=input(' TOLERANCIA '); disp(' ') l=0; for k=1:m if abs(D(k,k)) > tol l=l+1; DX(l,l)=D(k,k); VX(:,l)=V(:,k); end end if l > 0 D=DX; V=VX; end cnd=max(diag(D))/min(diag(D)); disp(' ********************') disp(' Solucion del Sistema') disp(' ********************') X=V*inv(D)*V'*A'*P*LT pause

111
NORM_X=sqrt(dot(X,X)) pause disp(' ') QX=V*inv(D)*V'; %disp(' *CORRECCIONES A LAS COORDENADAS APROXIMADAS*') %disp(' ') %pause %X=QX*A'*P*LT; %pause Vr=A*X-LT; %disp(' *CORRECCIONES A LAS OBSERVACIONES (RESIDUOS)') %disp(' ') %pause %Vr disp(' *VARIANZA A POSTERIORI Y NORMA DEL VECTOR DE CORRECCIONES*') disp(' ') nu=length(A(:,1))-rank(A); VAR=(Vr'*P*Vr)/nu NORM_X=sqrt(dot(X,X)) pause disp(' ') disp(' *REDUNDANCIA* ');disp(nu) disp(' ') disp(' *INGRESE VALORES CHI CUADRADO*') disp(' ') CHI0025= input(' CHI_0025= '); CHI0975= input(' CHI_0975= '); CHI1=(nu)*VAR/CHI0975; CHI2=(nu)*VAR/CHI0025; if 1 > CHI1 & 1 < CHI2 disp(' *PASA EL TEST CHI CUADRADO AL 95%* ') disp(' ') else disp(' NO PASA EL TEST CHI CUADRADO AL 95%') disp(' ') pause end pause x=reshape(X,3,m/3); AGPS=AGPS+x'; LT=LT'; end format bank disp(' ') disp(' *COORDENADAS AJUSTADAS*') disp(' ') disp(' PUNTO X Y Z') pause for i=1:npt COORDA(i,1)=i; for j=2:4 COORDA(i,j)=AGPS(i,j-1); end end COORDA pause format short disp(' ') disp(' *ERRORES ESTANDAR DE LAS COORDENADAS AJUSTADAS*') disp(' ') disp(' PUNTO ERRX. ERRY. ERRZ. EERM(est.)')

112
pause ERRXYZ=sqrt(VAR)*sqrt(diag(QX)); paso=0; for i=1:npt zum=0; ERROR(i,1)=i; for j=2:4 ERROR(i,j)=ERRXYZ(j-1+paso); zum=zum+ERROR(i,j)^2; end ERROR(i,5)=sqrt(zum); paso=paso+3; end ERROR pause disp(' ') disp(' *ELIPSOIDES DE ERROR ESTANDAR*') disp(' ') disp(' ') disp(' *REDUNDANCIA*') nu disp(' ') disp(' *INGRESE VALOR DE TABLA F(alfa = 0.05)') disp(' ') F= input(' F = '); disp(' ') FE=sqrt(3*F); pas= 0; for k=1:3:m-2 Q(1,1)=QX(k,k); Q(1,2)=QX(k,k+1); Q(1,3)=QX(k,k+2); Q(2,1)=Q(1,2); Q(2,2)=QX(k+1,k+1); Q(2,3)=QX(k+1,k+2); Q(3,1)=Q(1,3); Q(3,2)=Q(2,3); Q(3,3)=QX(k+2,k+2); pas=pas+1; disp(' ') disp(' *PUNTO*');disp(pas) [V,D]=eig(Q); disp(' *Semiejes del elipsoide de error del 95%') disp(' ') AS=sqrt(VAR)*sqrt(D(1,1))*FE; RU=(atan(V(2,1)/V(1,1))+pi-(pi/2)*sign(V(2,1))-(pi/2)*sign(V(2,1)/V(1,1)))*180/pi; EL=atan(V(3,1)/sqrt(V(1,1)^2+V(2,1)^2))*180/pi; fprintf(' A = %5.3f m\n',AS); fprintf(' RUMBO = %3.1f grados\n',RU); fprintf(' ELEVAC. = %3.1f grados\n',EL); disp(' ') BS=sqrt(VAR)*sqrt(D(2,2))*FE; RU=(atan(V(2,2)/V(1,2))+pi-(pi/2)*sign(V(2,2))-(pi/2)*sign(V(2,2)/V(1,2)))*180/pi; EL=atan(V(3,2)/sqrt(V(1,2)^2+V(2,2)^2))*180/pi; fprintf(' B = %5.3f m\n',BS); fprintf(' RUMBO = %3.1f grados\n',RU); fprintf(' ELEVAC. = %3.1f grados\n',EL); disp(' ') CS=sqrt(VAR)*sqrt(D(3,3))*FE;
113
RU=(atan(V(2,3)/V(1,3))+pi-(pi/2)*sign(V(2,3))-(pi/2)*sign(V(2,3)/V(1,3)))*180/pi; EL=atan(V(3,3)/sqrt(V(1,3)^2+V(2,3)^2))*180/pi; fprintf(' C = %5.3f m\n',CS); fprintf(' RUMBO = %3.1f grados\n',RU); fprintf(' ELEVAC. = %3.1f grados\n',EL); disp(' ') SPOS=sqrt(AS^2+BS^2+CS^2); VOL=(4/3)*pi*AS*BS*CS*1000000; fprintf(' ERROR DE POSICIONAMIENTO(m) = %5.3f \n',SPOS); fprintf(' VOLUMEN(cm3) = %5.3f \n',VOL); pause end disp(' ') disp(' *ELIPSES DE ERROR EN LOS PLANOS COORDENADOS DEL SGHL.') disp(' ') disp(' *REDUNDANCIA*') nu disp(' ') disp(' *INGRESE FACTOR DE MAGNIFICACION*') disp(' ') FM=input(' *FAC. MAG.= '); disp(' ') disp('** ELIPSES DE ERROR: HORIZONTAL Y VERTICALES EN EL S.G.T. **') disp(' ') for kk=1:3 if kk == 1 disp(' ') disp('*** ELIPSES Norte-Este ***') disp(' ') end if kk == 2 disp(' ') disp('*** ELIPSES Norte-Vertical ***') disp(' ') end if kk == 3 disp(' ') disp('*** ELIPSES Este-Vertical ***') disp(' ') end SAE=0; SEX=0; for k=1:m/3 XA=AGPS(k,1); YA=AGPS(k,2); ZA=AGPS(k,3); AL=atan2(YA,XA); PE=sqrt(XA^2+YA^2); b=AA*sqrt(1-E2); NUM=ZA*AA; DEN=PE*b; TITA=atan2(NUM,DEN); NUM=ZA+EP2*b*(sin(TITA)^3); DEN=PE-E2*AA*(cos(TITA)^3); FI=atan2(NUM,DEN); R(1,1)=-sin(FI)*cos(AL); R(1,2)=-sin(FI)*sin(AL); R(1,3)=cos(FI); R(2,1)=-sin(AL); R(2,2)=cos(AL);

114
R(2,3)=0; R(3,1)=cos(FI)*cos(AL); R(3,2)=cos(FI)*sin(AL); R(3,3)=sin(FI); disp(' *ELIPSE PUNTO*');disp(k) if kk == 1 MQ=R*QX(3*k-2:3*k,3*k-2:3*k)*R'; SQ=[MQ(1,1) MQ(1,2);MQ(2,1)MQ(2,2)]; end if kk == 2 MQ=R*QX(3*k-2:3*k,3*k-2:3*k)*R'; SQ=[MQ(1,1) MQ(1,3);MQ(3,1) MQ(3,3)]; end if kk == 3 MQ=R*QX(3*k-2:3*k,3*k-2:3*k)*R'; SQ=[MQ(2,2) MQ(2,3);MQ(3,2) MQ(3,3)]; end SD=abs(eig(SQ)); AA=sqrt(VAR)*sqrt(max(SD))*FM; B =sqrt(VAR)*sqrt(min(SD))*FM; AE=pi*AA*B; EX=1-(B/AA)^2; SAE=SAE+AE; SEX=SEX+EX; T=2*SQ(1,2)/(SQ(1,1)-SQ(2,2)); RU=(atan(T)/2)*180/pi; fprintf(' *SEMIEJE MAYOR A=%5.4f m\n',AA); fprintf(' *SEMIEJE MENOR B=%5.4f m\n',B); fprintf(' *AZIMUT FI=%5.2f grados\n',RU); fprintf(' *EXCENT. =%5.4f \n',EX); fprintf(' *AREA (cm2) =%5.2f \n',AE*10000); disp(' ') disp(' ') RU=RU*pi/180; theta=0:2*pi/100:2*pi; r=(AA*B)./sqrt(AA^2*sin(theta-RU).^2+B^2*cos(theta-RU).^2); polar(theta,r),title('Elipse de Error 95%') pause end fprintf(' *SUMA EXCENT. =%6.4f \n',SEX); fprintf(' *SUMA AREA (cm2) =%6.2f \n',SAE*10000); disp(' ') end disp(' ') disp(' FIABILIDAD: SI:INGRESE 1, NO.INGRESE 0') disp(' ') FIAB=input(' FIAB ='); if FIAB==1 disp(' ') disp(' Ingrese DELTA0') disp(' ') DELTA0=input(' DELTA0= '); disp(' ') nfl=length(A(:,1)); COVL=VAR*A*QX*A'; DLA=diag(COVL); QV=inv(P)-A*QX*A'; QVP=QV*P; I=eye(nfl); for i=1:n

115
c=I(:,i); w(i)=(c'*P*Vr)/sqrt(c'*P*QV*P*c); end MAUX=zeros(nfl,5); %DSV=VAR*diag(QV); R=diag(QVP); MAUX(:,4)=R; MAUX(:,2)=Vr; for k=1:n if k<=3*nv MAUX(k,1)=k; else MAUX(k,1)=k-3*nv; end SIGI=sqrt(VAR)/sqrt(P(k,k)); MAUX(k,3)=w(k); MAUX(k,5)=DELTA0*SIGI/sqrt(R(k)); %MAUX(k,6)=-VR(k)/MAUX(k,4); %MAUX(k,7)=(1-R(k))*MAUX(k,6); end disp(' ') disp(' *FIABILIDAD INTERNA*') disp(' ') disp(' Obs. Res. Fact.Baarda Nro.Redun. Min.Err.Det. ') pause alto=3; for i=1:n if i>=alto alto=alto+3; pause end MAUX(i,:) end disp(' ') SUR=sum(MAUX(:,4)); RM=SUR/n; fprintf(' SUMA DE REDUNDANCIAS = %6.4f\n',SUR); fprintf(' REDUNDANCIA MEDIA = %6.4f\n',RM ); fprintf(' GRADOS DE LIBERTAD = %2.0f\n',nu); disp(' ') pause disp(' ') disp(' TRANSFERENCIA A COORDENADAS: VECTORES DE FIABILIDAD EXTERNA') disp(' ') pause disp(' ') disp(' RESULTADOS: SI:INGRESE 1, NO:INGRESE 0') disp(' ') RESULT=input(' RESULT ='); if RESULT==1 for k=1:nfl e(k)=0; end e=e'; disp(' ') for k=1:nfl disp('***********************************') disp('**OBSERVABLE**');disp(k) e(k)=1; DELTAX=QX*A'*P*e*MAUX(k,5);

116
e(k)=0; for j=1:m/3 i=3*j-2; Q(1,1)=QX(i,i); Q(1,2)=QX(i,i+1); Q(1,3)=QX(i,i+2); Q(2,1)=Q(1,2); Q(2,2)=QX(i+1,i+1); Q(2,3)=QX(i+1,i+2); Q(3,1)=Q(1,3); Q(3,2)=Q(2,3); Q(3,3)=QX(i+2,i+2); [V,D]=eig(Q); V=inv(V); % MODULO DEL VECTOR INFLUENCIA vi=sqrt(DELTAX(i)^2+DELTAX(i+1)^2+DELTAX(i+2)^2); % SEMIEJES DEL ELIPSOIDE ABSOLUTO ESTANDAR ae=sqrt(VAR*D(1,1)); be=sqrt(VAR*D(2,2)); ce=sqrt(VAR*D(3,3)); % COORDENADAS DEL VECTOR INFLUENCIA EN EL SISTEMA DEL ELIPSOIDE ABSOLUTO XE=V(1,1)*DELTAX(i)+V(1,2)*DELTAX(i+1)+V(1,3)*DELTAX(i+2); YE=V(2,1)*DELTAX(i)+V(2,2)*DELTAX(i+1)+V(2,3)*DELTAX(i+2); ZE=V(3,1)*DELTAX(i)+V(3,2)*DELTAX(i+1)+V(3,3)*DELTAX(i+2); % COORDENADAS DE LA INTERSECCION DEL VECTOR INFLUENCIA CON EL ELIPSOIDE K=(XE/ae)^2+(YE/be)^2+(ZE/ce)^2; xn=XE/sqrt(K); yn=YE/sqrt(K); zn=ZE/sqrt(K); %DISTANCIA INTERSECCION CON EL ELIPSOIDE dn=sqrt(xn^2+yn^2+zn^2); if vi-dn > 0.0006 disp(' Punto');disp(j) fprintf(' Influencia sobre X = %7.4f m\n',DELTAX(i)); fprintf(' Influencia sobre Y = %7.4f m\n',DELTAX(i+1)); fprintf(' Influencia sobre Z = %7.4f m\n',DELTAX(i+2)); disp(' ') fprintf(' Influencia total = %7.4f m\n',vi); fprintf(' EERM(est) = %7.4f m\n',ERROR(j,5)); fprintf(' Dist.Inters._elips.= %7.4f m\n',dn); disp(' ') pause end end end end end disp(' ') % Componentes ajustadas, error ppm. COVL=VAR*A*QX*A'; for k=1:nv DX=OGPS(k,3)+Vr(3*k-2); DY=OGPS(k,4)+Vr(3*k-1); DZ=OGPS(k,5)+Vr(3*k); S =sqrt(OGPS(k,3)^2+OGPS(k,4)^2+OGPS(k,5)^2)+Vr(3*nv+k); disp(' ') disp(' ') disp(' *COMPONENTES AJUSTADAS (m): VECTOR* '),disp(k) fprintf(' *DELTA X = %12.3f\n',DX)

117
error=sqrt(DLA(3*k-2)); fprintf(' *error = %12.3f\n',error) fprintf(' *DELTA Y = %12.3f\n',DY) error=sqrt(DLA(3*k-1)); fprintf(' *error = %12.3f\n',error) fprintf(' *DELTA Z = %12.3f\n',DZ) error=sqrt(DLA(3*k)); fprintf(' *error = %12.3f\n',error) fprintf(' *MODULO = %12.3f\n',S) error=sqrt(DLA(3*nv+k)); fprintf(' *error = %12.3f\n',error) eppm=(error/S)*1000000; fprintf(' *error ppm = %10.3f\n',eppm) pause end disp(' ') disp(' ') disp(' *Posiciones Geodésicas Ajustadas*') disp(' ') ntp=length(AGPS(:,1)); a=6378137; f=1/298.2572235; e2=2*f-f^2; b=a*sqrt(1-e2); ep2=(a^2-b^2)/(b^2); for i=1:ntp X=AGPS(i,1); Y=AGPS(i,2); Z=AGPS(i,3); p=sqrt(X^2+Y^2); tita=atan((Z*a)/(p*b)); LA=atan(Y/X)*180/pi; GI(i,2)=LA*pi/180; N=Z+ep2*b*(sin(tita))^3; D=p-e2*a*(cos(tita))^3; FI=atan(N/D); GN=a/sqrt(1-e2*(sin(FI))^2); h=(p/cos(FI))-GN; FI=FI*180/pi; GI(i,1)=FI*pi/180; FIG=sign(FI)*fix(abs(FI)); FIM=fix((abs(FI)-abs(FIG))*60); FIS=((abs(FI)-abs(FIG))*60-FIM)*60; LAG=sign(LA)*fix(abs(LA)); LAM=fix((abs(LA)-abs(LAG))*60); LAS=((abs(LA)-abs(LAG))*60-LAM)*60; disp(' ') disp(' *Latitud y Longitud*') fprintf(' %2.0f %5.0f %3.0f %9.6f\n',i,FIG,FIM,FIS); fprintf(' %2.0f %5.0f %3.0f %9.6f\n',i,LAG,LAM,LAS); disp(' *Altura Elipsoidal: h*') fprintf(' %2.0f %10.3f\n',i,h); disp(' ') disp(' ') pause end QX=VAR*QX; disp(' Borrar variables auxiliares: 1; no borrar: 0') clave = input(' clave = ') if clave == 1 clear A

118
clear AA clear AE clear AGPS clear AL clear ALG clear ALM clear ALS clear AS clear B clear BS clear CHI0025 clear CHI0975 clear CHI1 clear CHI2 clear COVL clear CS clear D clear DELTA0 clear DELTAX clear DEN clear DLA clear DS2 clear DX clear DX0 clear DY clear DY0 clear DZ clear DZ0 clear E2 clear EL clear EP2 clear ERROR clear ERRXYZ clear EX clear F clear FE clear FI clear FIAB clear FIG clear FIM clear FIS clear FM clear FP clear K clear GN clear I clear LA clear LAG clear LAM clear LAG clear LAM clear LAS clear LT clear MAUX clear MQ clear N clear NCUEN clear NIT clear NORM_X clear NUM clear OGPS
119
clear P clear P0GPS clear PAX clear PE clear PXF clear PYF clear PZF clear Q clear QINV clear QL clear QV clear QVP clear R clear RESULT clear RM clear RU clear S clear SAE clear SD clear SEX clear SIGI clear SPOS clear SQ clear SR2 clear ST2 clear SUR clear T clear T1 clear T2 clear TITA clear V clear VAR clear VOL clear VX clear Vr clear X clear XA clear XE clear XF clear Y clear YA clear YE clear YF clear Z clear ZE clear ZA clear ZF clear a clear aa clear ae clear alto clear ans clear b clear be clear c clear ce clear dn clear cnd clear dpz clear e clear e2

120
clear ep2 clear eppm clear error clear f clear gn clear h clear i clear icuen clear j clear k clear kk clear l clear m clear n clear naa clear nfl clear np clear npf clear npt clear nql clear ntp clear nu clear nv clear p clear pas clear paso clear pf clear r clear theta clear tita clear tol clear vi clear w clear x clear xn clear yn clear zn clear zum end clear clave disp(' ') disp(' ') disp('**************') disp('**Terminé!!!**') disp('**************')

121
La aplicación MATLAB REDGPS_DNC1 para diseño de Redes GPS, por el método “prueba y error”. clear home disp(' ') disp(' ') disp(' Programa REDGPS_DNC1:Diseña una Red GPS resolviendo el Sistema de Ecuaciones ') disp(' de Observación, por la descomposición SVD,adaptada para matrices simétricas.') disp(' Los datos,códigos pesos y coordenadas aproximadas se almacenan en las matrices') disp(' VGPS y P0GPS, respectivamente. Muestra elipses de error absolutas al 95% de') disp(' confianza horizontal(N-E) y verticales (V-N y V-E)Y confiabilidad.') disp(' ') disp(' -RAUL A. MARQUEZ-') disp(' ') load VGPS.mat; load P0GPS.mat; nv=length(VGPS(:,1)); n=3*nv+nv; npt=length(P0GPS(:,1)); m=length(P0GPS(:,1))*3; K=m/3; A=zeros(n,m); disp(' ') disp('*INGRESE a y b en mm,según el ESTANDAR correspondiente*') disp(' ') a=input(' a? '); disp(' ') b=input(' b? '); disp(' ') %parámetros del elipsoide global(WGS'84) AA=6378137; E2=0.00669438; for k=1:nv i=VGPS(k,1); j=VGPS(k,2); FIG=-P0GPS(i,2); FIM=-P0GPS(i,3); FIS=-P0GPS(i,4); ALG=-P0GPS(i,5); ALM=-P0GPS(i,6); ALS=-P0GPS(i,7); h=P0GPS(i,8); FI=(FIG+FIM/60+FIS/3600)*pi/180; AL=(ALG+ALM/60+ALS/3600)*pi/180; GN=AA/sqrt(1-E2*sin(FI)^2); Xi=(GN+h)*cos(FI)*cos(AL); Yi=(GN+h)*cos(FI)*sin(AL); Zi=(GN*(1-E2)+h)*sin(FI); FIG=-P0GPS(j,2); FIM=-P0GPS(j,3); FIS=-P0GPS(j,4); ALG=-P0GPS(j,5);

122
ALM=-P0GPS(j,6); ALS=-P0GPS(j,7); h=P0GPS(j,8); FI=(FIG+FIM/60+FIS/3600)*pi/180; AL=(ALG+ALM/60+ALS/3600)*pi/180; GN=AA/sqrt(1-E2*sin(FI)^2); Xj=(GN+h)*cos(FI)*cos(AL); Yj=(GN+h)*cos(FI)*sin(AL); Zj=(GN*(1-E2)+h)*sin(FI); DX=Xj-Xi; DY=Yj-Yi; DZ=Zj-Zi; SD=sqrt(DX^2+DY^2+DZ^2); PEZO=1/((a+b*0.000001*SD*1000)/1000)^2; PESO(3*k-2)=PEZO; PESO(3*k-1)=PEZO; PESO(3*k)=PEZO; PESO(3*nv+k)=PEZO; %matriz de diseño A(3*k-2,3*i-2)=-1*sqrt(PEZO); A(3*k-1,3*i-1)=-1*sqrt(PEZO); A(3*k,3*i)=-1*sqrt(PEZO); A(3*k-2,3*j-2)=1*sqrt(PEZO); A(3*k-1,3*j-1)=1*sqrt(PEZO); A(3*k,3*j)=1*sqrt(PEZO); A(3*nv+k,3*i-2)=-(DX/SD)*sqrt(PEZO); A(3*nv+k,3*i-1)=-(DY/SD)*sqrt(PEZO); A(3*nv+k,3*i)=-(DZ/SD)*sqrt(PEZO); A(3*nv+k,3*j-2)=(DX/SD)*sqrt(PEZO); A(3*nv+k,3*j-1)=(DY/SD)*sqrt(PEZO); A(3*nv+k,3*j)=(DZ/SD)*sqrt(PEZO); end % Ingresa puntos Fijos y sus Pesos.- np=input(' *Cuántos Puntos Fijos? '); disp(' ') if np>0 for k=1:np npf=input(' *Identifique Punto Fijo* '); pf(k)=npf; end disp(' ') for k=1:length(pf) disp(' *Punto '),disp(pf(k)) XF(pf(k))=input(' *XF= '); PXF(pf(k))=input('*Peso '); disp(' ') YF(pf(k))=input(' *YF= '); PYF(pf(k))=input('*Peso '); disp(' ') ZF(pf(k))=input(' *ZF= '); PZF(pf(k))=input('*Peso '); A(n+3*k-2,3*pf(k)-2)=1*sqrt(PXF(pf(k))); A(n+3*k-1,3*pf(k)-1)=1*sqrt(PYF(pf(k))); A(n+3*k,3*pf(k)) =1*sqrt(PZF(pf(k))); disp(' ') end for kk=1:length(pf) PESO(n+3*kk-2)=PXF(pf(kk)); PESO(n+3*kk-1)=PYF(pf(kk)); PESO(n+3*kk) =PZF(pf(kk)); end

123
end [V,D]=eig(A'*A); l=0; disp(' ') disp('*VALORES PROPIOS*') disp(' ') format short e Y=sort(diag(D)) disp(' ') format tol=input('*TOLERANCIA* '); disp(' ') for k=1:m if abs(D(k,k)) < tol l=l+1; NC(l)=k; end end if l ~= 0 NFC=NC(1); for k=1:length(NC); D(NFC,:)=[]; D(:,NFC)=[]; V(:,NFC)=[]; end QX=V*inv(D)*V'; else QX=V*inv(D)*V'; end disp('*VARIANZA SINGULAR MEDIA') disp(' ') VMS=sum(diag(QX))/K n=length(A(:,1)); disp(' ') disp('*GRADOS DE LIBERTAD*') NU=n-rank(A) disp(' ') pause disp(' ') disp(' *ELIPSOIDES DE ERROR ESTANDAR*') disp(' ') disp(' ') disp(' *REDUNDANCIA*') NU disp(' ') disp(' *INGRESE VALOR DE TABLA F(alfa = 0.05)') disp(' ') F= input(' F = '); disp(' ') FE=sqrt(3*F); pas= 0; for k=1:3:m-2 Q(1,1)=QX(k,k); Q(1,2)=QX(k,k+1); Q(1,3)=QX(k,k+2); Q(2,1)=Q(1,2); Q(2,2)=QX(k+1,k+1); Q(2,3)=QX(k+1,k+2); Q(3,1)=Q(1,3); Q(3,2)=Q(2,3);

124
Q(3,3)=QX(k+2,k+2); pas=pas+1; disp(' ') disp(' *PUNTO*');disp(pas) [V,D]=eig(Q); disp(' *Semiejes del elipsoide de error del 95%') disp(' ') AS=sqrt(D(1,1))*FE; RU=(atan(V(2,1)/V(1,1))+pi-(pi/2)*sign(V(2,1))-(pi/2)*sign(V(2,1)/V(1,1)))*180/pi; EL=atan(V(3,1)/sqrt(V(1,1)^2+V(2,1)^2))*180/pi; fprintf(' A = %5.3f m\n',AS); fprintf(' RUMBO = %3.1f grados\n',RU); fprintf(' ELEVAC. = %3.1f grados\n',EL); disp(' ') BS=sqrt(D(2,2))*FE; RU=(atan(V(2,2)/V(1,2))+pi-(pi/2)*sign(V(2,2))-(pi/2)*sign(V(2,2)/V(1,2)))*180/pi; EL=atan(V(3,2)/sqrt(V(1,2)^2+V(2,2)^2))*180/pi; fprintf(' B = %5.3f m\n',BS); fprintf(' RUMBO = %3.1f grados\n',RU); fprintf(' ELEVAC. = %3.1f grados\n',EL); disp(' ') CS=sqrt(D(3,3))*FE; RU=(atan(V(2,3)/V(1,3))+pi-(pi/2)*sign(V(2,3))-(pi/2)*sign(V(2,3)/V(1,3)))*180/pi; EL=atan(V(3,3)/sqrt(V(1,3)^2+V(2,3)^2))*180/pi; fprintf(' C = %5.3f m\n',CS); fprintf(' RUMBO = %3.1f grados\n',RU); fprintf(' ELEVAC. = %3.1f grados\n',EL); disp(' ') SPOS=sqrt(AS^2+BS^2+CS^2); VOL=(4/3)*pi*AS*BS*CS*1000000; fprintf(' ERROR DE POSICIONAMIENTO(m) = %5.3f \n',SPOS); fprintf(' VOLUMEN(cm3) = %5.3f \n',VOL); pause end disp(' ') disp(' *ERRORES ESTANDAR DE LAS COORDENADAS AJUSTADAS*') disp(' ') disp(' PUNTO ERRX. ERRY. ERRZ. EERM(est.)') pause ERRXYZ=sqrt(diag(QX)); paso=0; for i=1:npt zum=0; ERROR(i,1)=i; for j=2:4 ERROR(i,j)=ERRXYZ(j-1+paso); zum=zum+ERROR(i,j)^2; end ERROR(i,5)=sqrt(zum); paso=paso+3; end ERROR disp(' ') disp('** ELIPSES DE ERROR: HORIZONTAL Y VERTICALES EN EL S.G.T. **') disp(' ') disp(' *REDUNDANCIA*')

125
NU disp(' ') disp('*INGRESE FACTOR DE MAGNIFICACION*') disp(' ') FM=input('*FAC. MAG.= '); for kk=1:3 if kk == 1 disp(' ') disp('*** ELIPSES Norte-Este ***') disp(' ') end if kk == 2 disp(' ') disp('*** ELIPSES Norte-Vertical ***') disp(' ') end if kk == 3 disp(' ') disp('*** ELIPSES Este-Vertical ***') disp(' ') end SAE=0; SEX=0; for k=1:m/3 FIG=-P0GPS(k,2); FIM=-P0GPS(k,3); FIS=-P0GPS(k,4); FI=(FIG+FIM/60+FIS/3600)*pi/180; ALG=-P0GPS(k,5); ALM=-P0GPS(k,6); ALS=-P0GPS(k,7); AL=(ALG+ALM/60+ALS/3600)*pi/180; R(1,1)=-sin(FI)*cos(AL); R(1,2)=-sin(FI)*sin(AL); R(1,3)=cos(FI); R(2,1)=-sin(AL); R(2,2)=cos(AL); R(2,3)=0; R(3,1)=cos(FI)*cos(AL); R(3,2)=cos(FI)*sin(AL); R(3,3)=sin(FI); disp('*ELIPSE PUNTO*');disp(k) if kk == 1 MQ=R*QX(3*k-2:3*k,3*k-2:3*k)*R'; SQ=[MQ(1,1) MQ(1,2);MQ(2,1)MQ(2,2)]; end if kk == 2 MQ=R*QX(3*k-2:3*k,3*k-2:3*k)*R'; SQ=[MQ(1,1) MQ(1,3);MQ(3,1) MQ(3,3)]; end if kk == 3 MQ=R*QX(3*k-2:3*k,3*k-2:3*k)*R'; SQ=[MQ(2,2) MQ(2,3);MQ(3,2) MQ(3,3)]; end SD=abs(eig(SQ)); AA=sqrt(max(SD))*FM; B=sqrt(min(SD))*FM; AE=pi*AA*B; EX=1-(B/AA)^2; SAE=SAE+AE; SEX=SEX+EX;

126
T=2*SQ(1,2)/(SQ(1,1)-SQ(2,2)); RU=(atan(T)/2)*180/pi; fprintf('*SEMIEJE MAYOR A=%5.4f m\n',AA); fprintf('*SEMIEJE MENOR B=%5.4f m\n',B); fprintf('*AZIMUT FI=%5.2f grados\n',RU); fprintf('*EXCENT. =%5.4f \n',EX); fprintf('*AREA (cm2) =%5.2f \n',AE*10000); disp(' ') disp(' ') RU=RU*pi/180; theta=0:2*pi/100:2*pi; r=(AA*B)./sqrt(AA^2*sin(theta-RU).^2+B^2*cos(theta-RU).^2); polar(theta,r),title('Elipse de Error 95%') pause end fprintf('*SUMA EXCENT. =%6.4f \n',SEX); fprintf('*SUMA AREA (cm2) =%6.2f \n',SAE*10000); disp(' ') end disp(' ') disp('FIABILIDAD : Ingrese Parámetro de Desplazamiento') disp(' ') DELTA0=input('DELTA0 '); disp(' ') n=length(A(:,1)); PES=eye(n); for k=1:n for l=1:m A(k,l)=(PESO(k)^-0.5)*A(k,l); end end for k=1:n PES(k,k)=PESO(k); end R=eye(n)-A*QX*A'*PES; MAUX=zeros(n,3); MAUX(:,2)=diag(R); DSLA=diag(inv(PES)-A*QX*A'); for k=1:n if k<=3*nv MAUX(k,1)=k; else MAUX(k,1)=k-3*nv; end SIGI=1/sqrt(PESO(k)); MAUX(k,3)=DELTA0*SIGI/sqrt(MAUX(k,2)); end for k=1:n MAUX(k,4)=DELTA0/sqrt(R(k,k)); MAUX(k,5)=DELTA0*sqrt((1-R(k,k))/R(k,k)); end disp(' FIABILIDAD INTERNA') disp(' ') disp(' Obs. Nro.Reund. Min.Err.Det. Prm.Fiab.Int. Prm.Fiab.Ext.') pause MAUX disp(' ') SUR=sum(MAUX(:,2)); RM=SUR/n;

127
fprintf('SUMA DE REDUNDANCIAS = %6.4f\n',SUR); fprintf('REDUNDANCIA MEDIA = %6.4f\n',RM ); fprintf('GRADOS DE LIBERTAD = %2.0f\n',NU ); disp(' ') disp(' ') pause disp('TRANSFERENCIA A COORDENADAS: VECTORES DE FIABILIDAD EXTERNA') disp(' ') for k=1:n e(k)=0; end e=e'; for k=1:n disp('***************************') disp(' ') disp(' ') disp('**OBSERVABLE**');disp(k) e(k)=1; DELTAX=QX*A'*PES*e*MAUX(k,3); e(k)=0; for j=1:m/3 i=3*j-2; Q(1,1)=QX(i,i); Q(1,2)=QX(i,i+1); Q(1,3)=QX(i,i+2); Q(2,1)=Q(1,2); Q(2,2)=QX(i+1,i+1); Q(2,3)=QX(i+1,i+2); Q(3,1)=Q(1,3); Q(3,2)=Q(2,3); Q(3,3)=QX(i+2,i+2); [V,D]=eig(Q); V=inv(V); % MODULO DEL VECTOR INFLUENCIA vi=sqrt(DELTAX(i)^2+DELTAX(i+1)^2+DELTAX(i+2)^2); % SEMIEJES DEL ELIPSOIDE ABSOLUTO ESTANDAR ae=sqrt(D(1,1)); be=sqrt(D(2,2)); ce=sqrt(D(3,3)); % COORDENADAS DEL VECTOR INFLUENCIA EN EL SISTEMA DEL ELIPSOIDE ABSOLUTO XE=V(1,1)*DELTAX(i)+V(1,2)*DELTAX(i+1)+V(1,3)*DELTAX(i+2); YE=V(2,1)*DELTAX(i)+V(2,2)*DELTAX(i+1)+V(2,3)*DELTAX(i+2); ZE=V(3,1)*DELTAX(i)+V(3,2)*DELTAX(i+1)+V(3,3)*DELTAX(i+2); % COORDENADAS DE LA INTERSECCION DEL VECTOR INFLUENCIA CON EL ELIPSOIDE K=(XE/ae)^2+(YE/be)^2+(ZE/ce)^2; xn=XE/sqrt(K); yn=YE/sqrt(K); zn=ZE/sqrt(K); %DISTANCIA INTERSECCION CON EL ELIPSOIDE dn=sqrt(xn^2+yn^2+zn^2); if vi-dn > 0.0006 disp(' Punto');disp(j) fprintf(' Influencia sobre X = %7.4f m\n',DELTAX(i)); fprintf(' Influencia sobre Y = %7.4f m\n',DELTAX(i+1)); fprintf(' Influencia sobre Z = %7.4f m\n',DELTAX(i+2)); disp(' ') fprintf(' Influencia total = %7.4f m\n',vi); fprintf(' EERM(est) = %7.4f m\n',ERROR(j,5));

128
fprintf(' Dist.Inters._elips.= %7.4f m\n',dn); disp(' ') pause end end end disp('**Terminé!!!**') La siguiente planilla EXCEL muestra las matrices de datos que usan las aplicaciones REDGPS_ALV y REDGPS_DNC1. La matriz POGPS contiene las posiciones geodésicas aproximadas, latitud, longitud y altura elipsoidal y se utiliza en ambas aplicaciones. La matriz VGPS contiene la codificación de los vectores según las estaciones que involucran (origen y extremo) y se utiliza en la aplicación de diseño solamente. La matriz OGPS contiene las codificaciones de los vectores y las componentes ∆X, ∆Y, ∆Z, se utiliza en la aplicación de ajuste libre y vinculado. La matriz QL contiene las covarianzas de los vectores observados y se utiliza en la aplicación de ajuste libre y vinculado.Una vez copiadas en la planilla EXCEL, las matrices de datos se transfieren fácilmente a MATLAB. Los datos restantes se ingresan por pantalla durante la ejecución del proceso. MATRIZ DE DATOS: P0GPS.mat
1 30 51 59 69 13 20 26942 30 19 37 69 25 45 26343 30 49 52 69 35 36 27984 31 1 47 69 27 19 1804
MATRIZ DE DATOS: VGPS.mat
2 1 3 2 1 3 4 1 3 4 1 3 2 4
MATRIZ DE DATOS: OGPS.mat
2 1 14296.367 17820.999 -19700.196 3 2 18070.512 -3464.677 16362.982 1 3 -32366.915 -14356.244 3337.279 4 1 24254.657 -1642.671 15055.688 3 4 8112.244 15998.976 -18393.056 1 3 -32366.836 -14356.268 3337.355
MATRIZ DE DATOS: QL.mat
1.02E-03 0 0 -1.30E-03 3.25E-03 0 -6.02E-04 1.37E-03 1.09E-02 1.96E-04 0 0
129
-2.56E-04 6.25E-04 0 -1.25E-04 2.84E-04 2.56E-04 3.61E-04 0.00E+00 0
-4.65E-04 1.16E-03 0 -2.05E-04 4.69E-04 4.00E-04 2.56E-04 0.00E+00 0
-3.08E-04 1.37E-03 0 -1.06E-04 4.20E-04 3.61E-04 4.41E-04 0.00E+00 0
-2.59E-04 3.32E-03 0 -2.57E-04 1.12E-03 1.16E-03 6.76E-04 0.00E+00 0
-4.19E-04 4.90E-03 0 -3.75E-04 1.70E-03 1.70E-03
MATRIZ DE DATOS: QL.mat (covarianzas nulas)
1.02E-03 0 0 0.00E+00 3.25E-03 0 0.00E+00 0.00E+00 1.09E-02 1.96E-04 0 0 0.00E+00 6.25E-04 0 0.00E+00 0.00E+00 2.56E-04 3.61E-04 0.00E+00 0 0.00E+00 1.16E-03 0 0.00E+00 0.00E+00 4.00E-04 2.56E-04 0.00E+00 0 0.00E+00 1.37E-03 0 0.00E+00 0.00E+00 3.61E-04 4.41E-04 0.00E+00 0 0.00E+00 3.32E-03 0 0.00E+00 0.00E+00 1.16E-03 6.76E-04 0.00E+00 0 0.00E+00 4.90E-03 0 0.00E+00 0.00E+00 1.70E-03

130
BIBLIOGRAFIA Aguilar, F. (1942). “Lecciones de Geodesia: Teoría de los Errores de Observación y Cálculo de Compensación por el Método de los Mínimos Cuadrados”. Centro de Estudiantes de Ingeniería UNLP. Bjerhammar, A (1973). “Theory of Errors and Generalized Matrix Inverses” Elsevier Scientific Publishing Company. Berné Valero, J. L. (2001).”Microgeodesia y Redes de Alta Precisión: Proyecto Práctico 2001”. Universidad Politécnica de Valencia. Bolshakov V. y Gaidayev P. (1989). “Teoría de la Elaboración Matemática de Mediciones Geodésicas”. Editorial MIR-Moscú. Brunini, C. (1992) “Compensación de Redes”. UNLP. Chrzanowski, A. (1974). “Adjustment and Error Analysis of Surveying Networks” Department of Surveying Engineering-University of New Brunswick-Fredericton, N.B. Etter, D.M. (1998). “Solución de problemas de ingeniería con MATLAB” Segunda edición. Department of Electrical and Computer Engineering. University of Colorado, Boulder. Prentice-Hall. Forsythe, G y Moler C. (1973). “Solución mediante Computadoras de Sistemas Algebraicos Lineales”. Ed. EUDEBA / Editorial Universitaria de Buenos Aires. Hoffmann-Wellenhoff, B.; Lichtenegger H. and Collins, J. (1992). “Global Positioning System: Theory and Practice”. Springler-Verlag Wein. New York Leick, A. (1995). “GPS Satellite Surveying”. Departament of Surveying Engineering. University of Maine. Orono Maine. John Wiley & Sons, Inc. Rainsford, H. (1957). “ Survey Adjustment and Least Squares”. Constable.
Sutti Juraj and Torok Csaba (1996).“Testing 3D displacement vectors by confidence . ellipsoids”. Acta Montanistica Slovaca
Spiegel, M. (1996). “Probabilidad y Estadística”. Segunda edición. Schaum-Mc.
Graw Hill Strang, G. (1986). “Algebra Lineal y sus Aplicaciones”. Massachussets Institute of Technology”. Adison-Wesley Iberoamericana.