
Capítulo 1: ELASTICIDAD
45
Capítulo 1: ELASTICIDAD La mayoría de los materiales tienen la facultad de resistir y recuperarse de las deformaciones provocadas por ciertas fuerzas. Esta facultad se llama elasticidad. Y la elasticidad es la base para todos los aspectos de la mecánica de rocas. Esto responde a una relación lineal entre las fuerzas externas y la deformación correspondiente. Cuando la variación en las fuerzas son pequeñas, la respuesta es (casi) siempre lineal. Por consiguiente, la teoría de la elasticidad lineal es fundamental para todas las discusiones de la elasticidad. La teoría de la elasticidad reside en dos conceptos esfuerzo y deformación. La ingeniería petrolera es entendida mediante la mecánica de rocas, muchos de los temas de interés derivan de las rocas con significativa porosidad, así como la permeabilidad. La teoría elástica para materiales sólidos no es factible para describir con detalle el comportamiento de dichos materiales y el concepto de poro-elasticidad, por lo tanto, ha sido tomado en cuenta. La respuesta de materiales rocosos elásticos también puede depender del tiempo, así la variación del material varía con el tiempo, aún cuando las condiciones externas son constantes.
Transcript of Capítulo 1: ELASTICIDAD
Capítulo 1: ELASTICIDAD
La mayoría de los materiales tienen la facultad de resistir y
recuperarse de las deformaciones provocadas por ciertas
fuerzas. Esta facultad se llama elasticidad. Y la elasticidad
es la base para todos los aspectos de la mecánica de rocas.
Esto responde a una relación lineal entre las fuerzas externas
y la deformación correspondiente. Cuando la variación en las
fuerzas son pequeñas, la respuesta es (casi) siempre lineal.
Por consiguiente, la teoría de la elasticidad lineal es
fundamental para todas las discusiones de la elasticidad.
La teoría de la elasticidad reside en dos conceptos esfuerzo
y deformación. La ingeniería petrolera es entendida mediante la
mecánica de rocas, muchos de los temas de interés derivan de
las rocas con significativa porosidad, así como la
permeabilidad. La teoría elástica para materiales sólidos no es
factible para describir con detalle el comportamiento de dichos
materiales y el concepto de poro-elasticidad, por lo tanto, ha
sido tomado en cuenta. La respuesta de materiales rocosos
elásticos también puede depender del tiempo, así la variación
del material varía con el tiempo, aún cuando las condiciones
externas son constantes.
El esfuerzo
Considerar la situación mostrada en la figura 1. La parte más
alta de una columna está resistiendo un peso. Debido al peso,
la fuerza está actuando sobre la columna, mientras la columna
reacciona con un peso igual, pero con una fuerza dirigida al
revés. La columna está soportada por una base. Por lo tanto, la
fuerza actuante en la parte más alta de la columna estaría
actuando a través de cualquier sección transversal de la misma.
El área de la fuerza transversal en a) es A. Si la fuerza
actuando a través de la sección transversal es denotada por F,
entonces el esfuerzo σ en la sección transversal es definido
como:
σ=FA
(1.1)
La unidad para el esfuerzo en el SI es el Pascal (= Pascal =
N/m2). En la industria petrolera, unidades en el campo de
petróleo como psi (libras por pulgada cuadrada) son muy usadas,
de tal formal que deben ser familiares.
El símbolo del esfuerzo σ no sólo es definido por la física. Enla mecánica de rocas el símbolo expresa que los esfuerzos
compresivos son positivos. La razón histórica para esto es que
los esfuerzos tratados en la mecánica de rocas son compresivos.
El símbolo convencional no causa problemas cuando es usado
constantemente, pero es importante recordar que el signo
convencional opuesto es la elección preferida en otras ciencias
que envuelven la elasticidad y que también es usada
ocasionalmente en la mecánica de rocas.
La ecuación 1.1 muestra que el esfuerzo es definido por la
fuerza y la sección transversal (o generalmente, superficie),
por el cual la fuerza está actuando. Considerar la sección
transversal en b). La fuerza actuante en esta sección
transversal es igual a la fuerza actuante en la sección
transversal en a) (abandonando el peso del pilar). El área A'de la sección transversal en b) es, sin embargo, más pequeña
que A. Por lo tanto, el esfuerzo σ=F/A' en b) es mayor que elesfuerzo en a), i.e. el esfuerzo depende de la posición sin la
muestra. Yendo un poco más allá, podemos dividir la sección
transversal en a) en un número infinito de subsecciones ∆ A,por el cual una parte pequeña infititesimal ∆F del total de lafuerza está actuando (figura 2) La fuerza ∆F puede variar deuna sección a otra. Considerar la subsección i el cual contieneal punto P. El esfuerzo en el punto P es definido como el
límite del valor de ∆FI/∆AI cuando ∆ AI tiende a cero, i.e.:
σ=lim∆AI→∞
∆Fi
∆Ai(1.2)
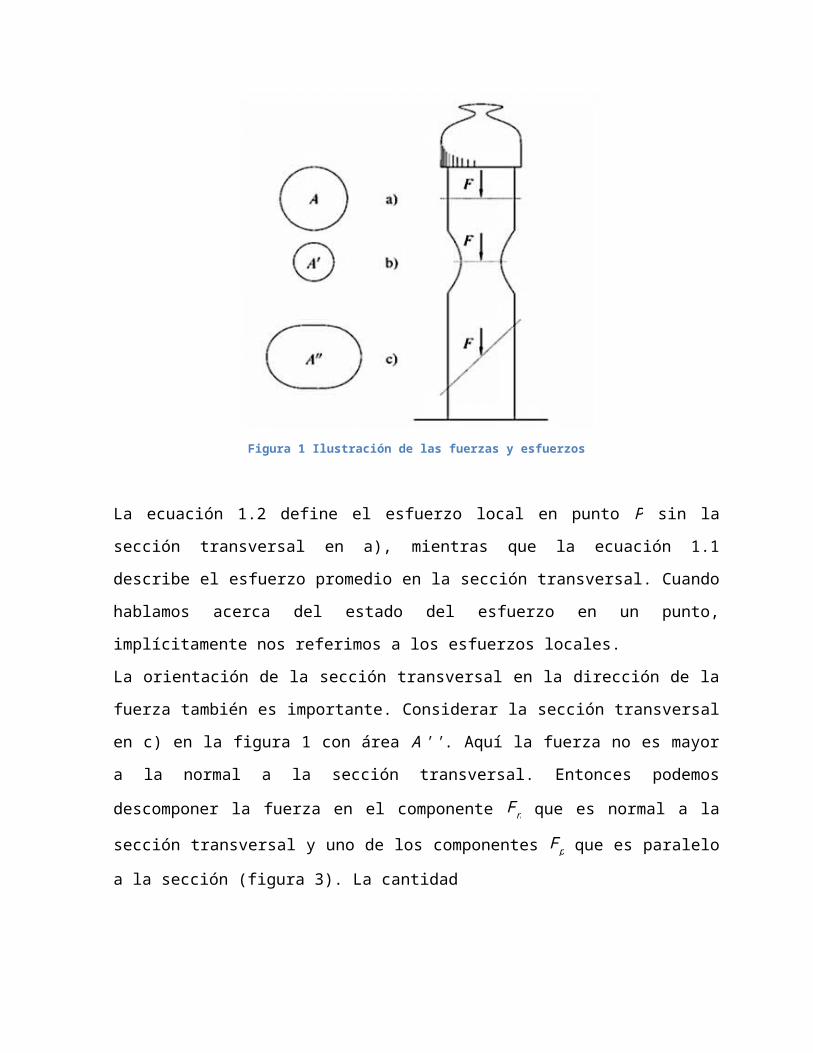
Figura 1 Ilustración de las fuerzas y esfuerzos
La ecuación 1.2 define el esfuerzo local en punto P sin lasección transversal en a), mientras que la ecuación 1.1
describe el esfuerzo promedio en la sección transversal. Cuando
hablamos acerca del estado del esfuerzo en un punto,
implícitamente nos referimos a los esfuerzos locales.
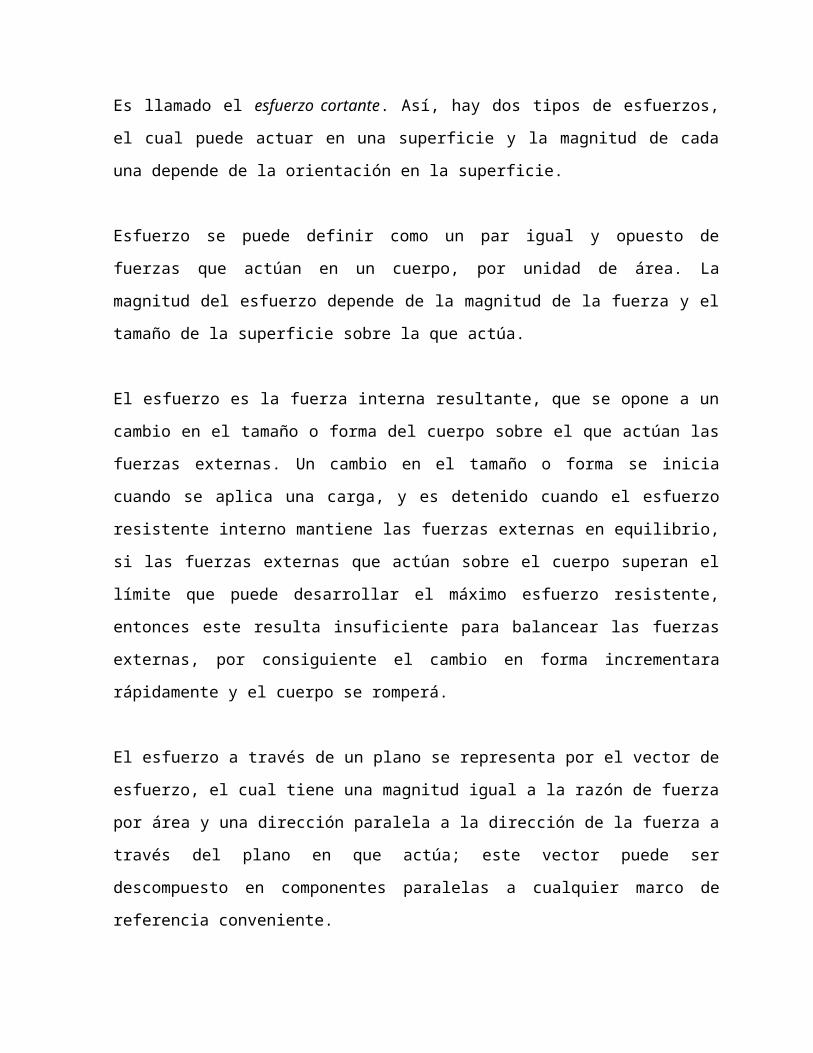
La orientación de la sección transversal en la dirección de la
fuerza también es importante. Considerar la sección transversal
en c) en la figura 1 con área A''. Aquí la fuerza no es mayora la normal a la sección transversal. Entonces podemos
descomponer la fuerza en el componente Fn que es normal a la
sección transversal y uno de los componentes Fp que es paralelo
a la sección (figura 3). La cantidad
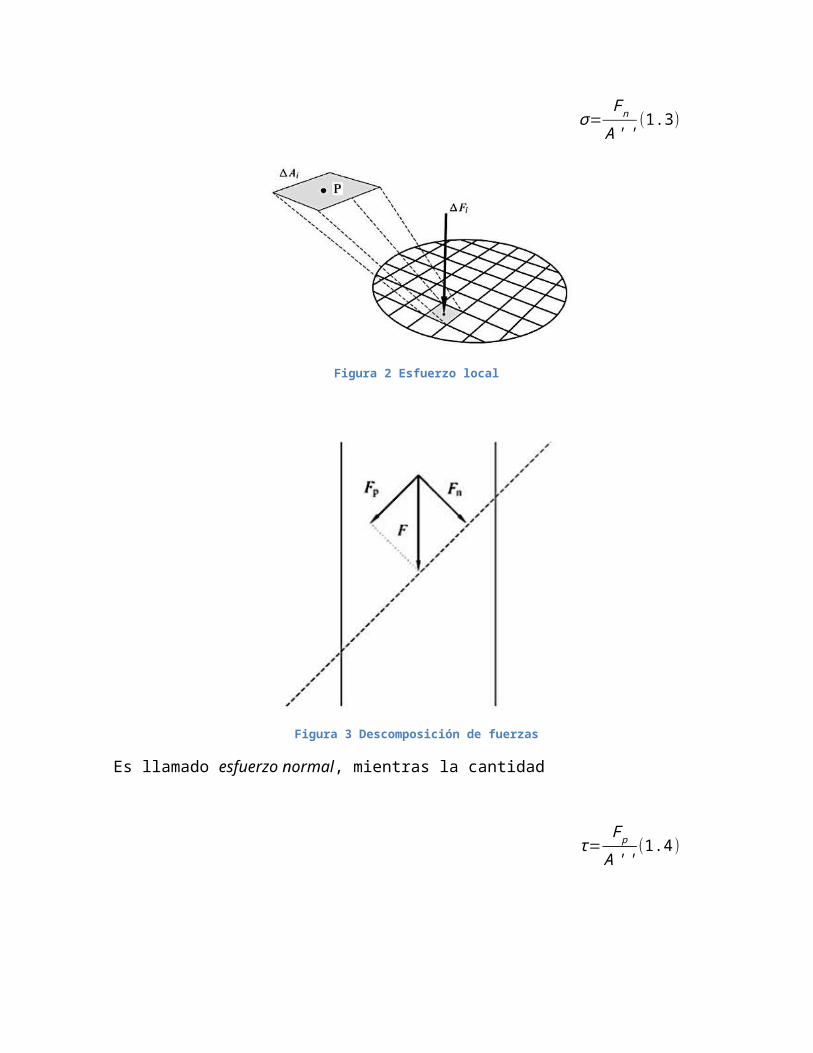
σ=Fn
A''(1.3)
Figura 2 Esfuerzo local
Figura 3 Descomposición de fuerzas
Es llamado esfuerzo normal, mientras la cantidad
τ=Fp
A''(1.4)
Es llamado el esfuerzo cortante. Así, hay dos tipos de esfuerzos,
el cual puede actuar en una superficie y la magnitud de cada
una depende de la orientación en la superficie.
Esfuerzo se puede definir como un par igual y opuesto de
fuerzas que actúan en un cuerpo, por unidad de área. La
magnitud del esfuerzo depende de la magnitud de la fuerza y el
tamaño de la superficie sobre la que actúa.
El esfuerzo es la fuerza interna resultante, que se opone a un
cambio en el tamaño o forma del cuerpo sobre el que actúan las
fuerzas externas. Un cambio en el tamaño o forma se inicia
cuando se aplica una carga, y es detenido cuando el esfuerzo
resistente interno mantiene las fuerzas externas en equilibrio,
si las fuerzas externas que actúan sobre el cuerpo superan el
límite que puede desarrollar el máximo esfuerzo resistente,
entonces este resulta insuficiente para balancear las fuerzas
externas, por consiguiente el cambio en forma incrementara
rápidamente y el cuerpo se romperá.
El esfuerzo a través de un plano se representa por el vector de
esfuerzo, el cual tiene una magnitud igual a la razón de fuerza
por área y una dirección paralela a la dirección de la fuerza a
través del plano en que actúa; este vector puede ser
descompuesto en componentes paralelas a cualquier marco de
referencia conveniente.
El tensor de esfuerzos
Tensión o esfuerzo tensional es la fuerza interna de un cuerpo
que resiste la acción de fuerzas externas tendientes a
incrementar la longitud del cuerpo.
Los esfuerzos relacionados a la superficie normal al eje x
puede ser denotado σx,τxy y τxz representando el esfuerzo
normal, el esfuerzo de corte en dirección y y el esfuerzo decorte en dirección z. Físicamente, solamente habrá un esfuerzode corte asociado con la superficie. Sin embargo, la
orientación del esfuerzo de corte ha sido identificada y
convenientemente es hecho por la identificación en los
componentes y y z: τxy y τxz. De forma similar, los esfuerzos
relacionados a la superficie normal al eje yson denotados σy,τyxy τyz, mientras que los esfuerzos relacionados al eje zson
denotados σz,τzx y τzy. De este modo, todos juntos son 9
componentes de esfuerzos relacionados al punto P:
( σx τxyτyx σy
τxz
τyz
τzx τzy σz)(1.5)
La expresión 1.5 es llamada esfuerzo de corte.
Asociando el primer índice con la normal y el segundo con la
fuerza direccional, es una materia de cambio, similar al
símbolo convencional.
Algunas veces es conveniente denotar el tensor de esfuerzo por
un simple símbolo, por ejemplo σ. Implícitamente, σsignifica lacolección de los componentes del esfuerzo dado por 1.5. El
tensor de esfuerzo también tiene un significado físico. Si r
es una unidad de vector, la expresión |σ .r|, representa elesfuerzo total (normal y de corte) en la dirección de r.
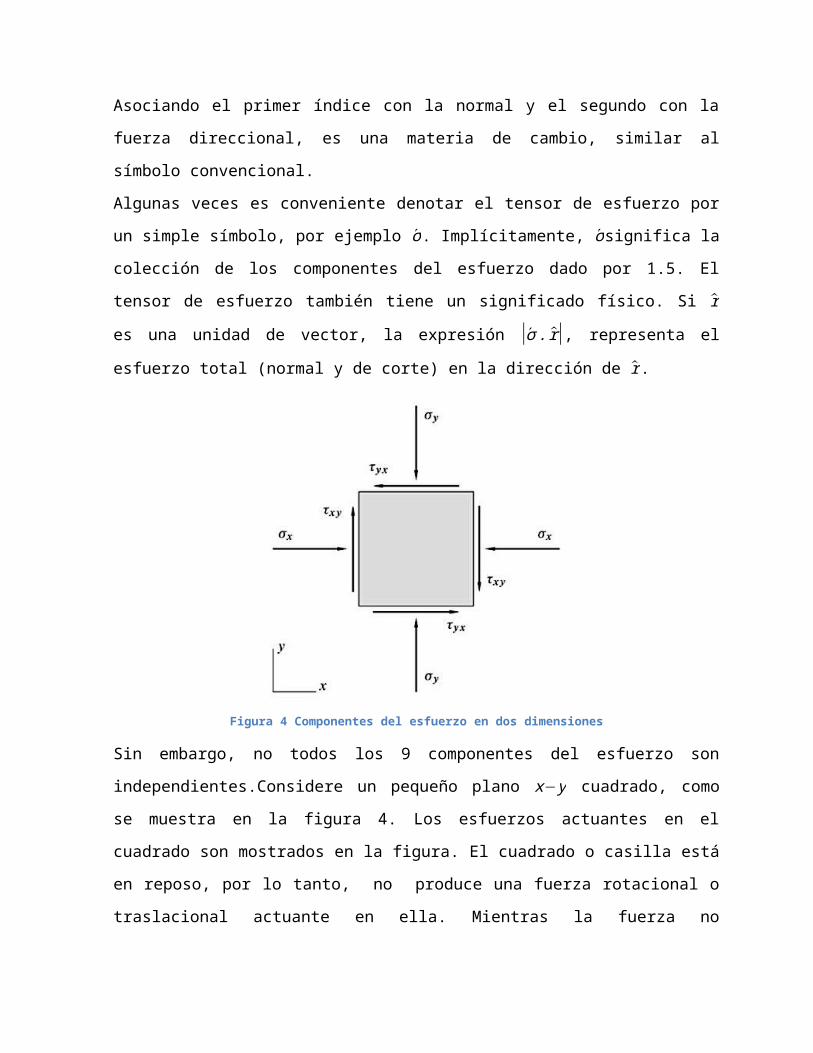
Figura 4 Componentes del esfuerzo en dos dimensiones
Sin embargo, no todos los 9 componentes del esfuerzo son
independientes.Considere un pequeño plano x−y cuadrado, comose muestra en la figura 4. Los esfuerzos actuantes en el
cuadrado son mostrados en la figura. El cuadrado o casilla está
en reposo, por lo tanto, no produce una fuerza rotacional o
traslacional actuante en ella. Mientras la fuerza no
traslacional está ya asegurada, la fuerza no rotacional
requiere que
τxy=τyx(1.6)
De forma similar, puede ser mostrado que
τxz=τzx(1.7)
y
τyz=τzy(1.8)
Las relaciones 1.6 a 1.8 son generales y reducen el número de
componentes independientes a un tensor de esfuerzo de 6
componentes (1.5).
La notación usada en 1.5 no es muy conveniente para los
cálculos teóricos. Para tales propósitos, la siguiente notación
es más usada: ambos tipos de esfuerzo (normal y corte) son
denotados por σij. El subíndice i y j pueden ser cualquier
número 1, 2, 3, el cual representa los ejes x,y y z,respectivamente. El primer subíndice i identifica el eje
normal a la superficie actual, mientras que el segundo
subíndice jidentifica la dirección de la fuerza. De esta forma,
de la figura 4 podemos ver que σ11=σx,σ13=τxz,etcétera. En esta
notación el tensor de esfuerzos llega a ser
σ=(σ11 σ12
σ12 σ22
σ13
σ23
σ13 σ23 σ33)(1.9)
Donde ha sido usada la simetría del tensor de esfuerzos.
Ecuaciones de equilibrio
Un ejemplo de fuerza volumétrica es la gravedad. Será denotado
por fx,fyy fz los componentes de la fuerza volumétrica por
unidad de masa actuando en el punto x,yy z del volumen. Según
la convención, fxes positivo si actúa como negativo en la
dirección x, similarmente para fyy fz. Por ejemplo, considere un
volumen pequeño ∆ Vde un material con densidad ρ. Si z está enel eje, la fuerza volumétrica vence la gravedad actuando en
este pequeño volumen ρfx∆V=ρg ∆V, donde g es la aceleración de
la gravedad.
La fuerza volumétrica generalmente aumenta el gradiente del
esfuerzo. Por ejemplo, un elemento en formación no sólo es tema
de la fuerza de gravedad, también tiene que llevar el peso.
Así, el total de esfuerzos incrementa con el aumento de la
profundidad.
Para que un cuerpo tensionado permanezca en reposo, se requiere
que todas las fuerzas actuantes en el cuerpo se cancelen. Así
se produce un conjunto de ecuaciones para el gradiente de
esfuerzo. Estas ecuaciones son llamadas ecuaciones de equilibrio.
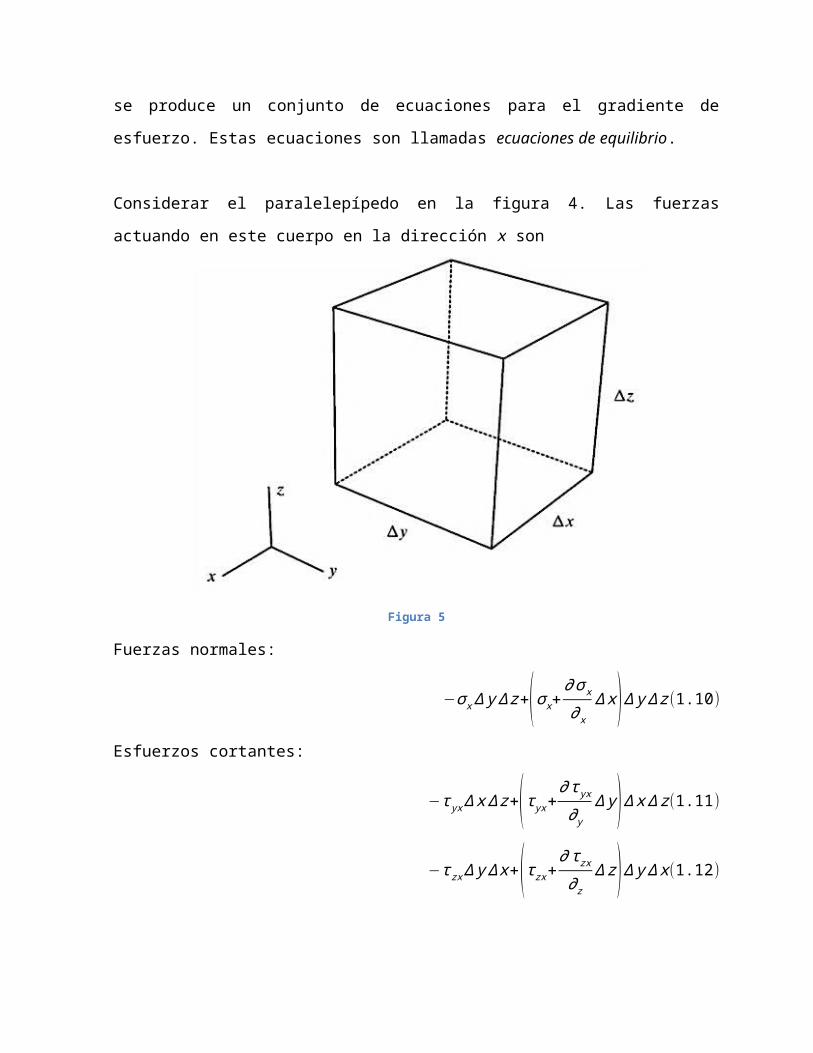
Considerar el paralelepípedo en la figura 4. Las fuerzas
actuando en este cuerpo en la dirección x son
Figura 5
Fuerzas normales:
−σx∆yΔz+(σx+∂σx
∂xΔx)ΔyΔz(1.10)
Esfuerzos cortantes:
−τyx∆xΔz+(τyx+∂τyx
∂yΔy)ΔxΔz(1.11)
−τzx∆yΔx+(τzx+∂τzx∂zΔz)ΔyΔx(1.12)

Fuerzas volumétricas:
ρfx∆x∆y∆z(1.13)
Sumando las ecuaciones 1.10 a 1.13 y dividiendo entre ΔxΔyΔz,encontramos que se cancelan las fuerzas en dirección x
∂σx
∂x+∂τyx
∂y+∂τzx∂z
=ρfx=0(1.14)
∂σy
∂x+∂τxy
∂x+∂τzy∂z
=ρfx=0(1.15)
∂σz
∂z+∂τxz
∂x+∂τyz
∂y=ρfx=0(1.16)
Las ecuaciones 1.14 a 1.16 son las ecuaciones de equilibrio en
términos de esfuerzos. Notar que en la notación alternativa
(mostrada en la ecuación 1.9 para los esfuerzos y con
x1=x,x2=y,x3=z), estas ecuaciones toman una forma
particularmente simple:
∑j
∂σij
∂xj+ρfi=0(1.17)
Esfuerzos principales en dos dimensiones
Para orientaciones especiales en el sistema cartesiano, la
tensión de esfuerzos tiene una simple forma. Para revelar esta
forma, se estudiará inicialmente el esfuerzo en dos
dimensiones.
Considerar la normal (σ) y el esfuerzo cortante (τ) en unasuperficie en dirección normal a una dirección general θ en elplano xy, como se muestra en la figura 3. El triángulo en lafigura está en reposo, de tal forma, que no hay fuerzas
actuando en él. La cancelación de las fuerzas supone que:
σ=σxcos2θ+σysen
2θ+2τxysenθcosθ(1.18)
¿12 (σx+σy)+12 (σx−σy )cos2θ+τxysen2θ(1.19)
τ=σysenθcosθ−σxcosθsenθ+τxycosθcosθ−τyxsenθsenθ(1.20)
¿ 12 (σy−σx)sen2θ+τxycos2θ(1.21)
A través de θ es posible obtener τ=0. De la ecuación (1.21)
vemos lo que sucede cuando :
tan2θ=2τxyσx−σy
(1.22)
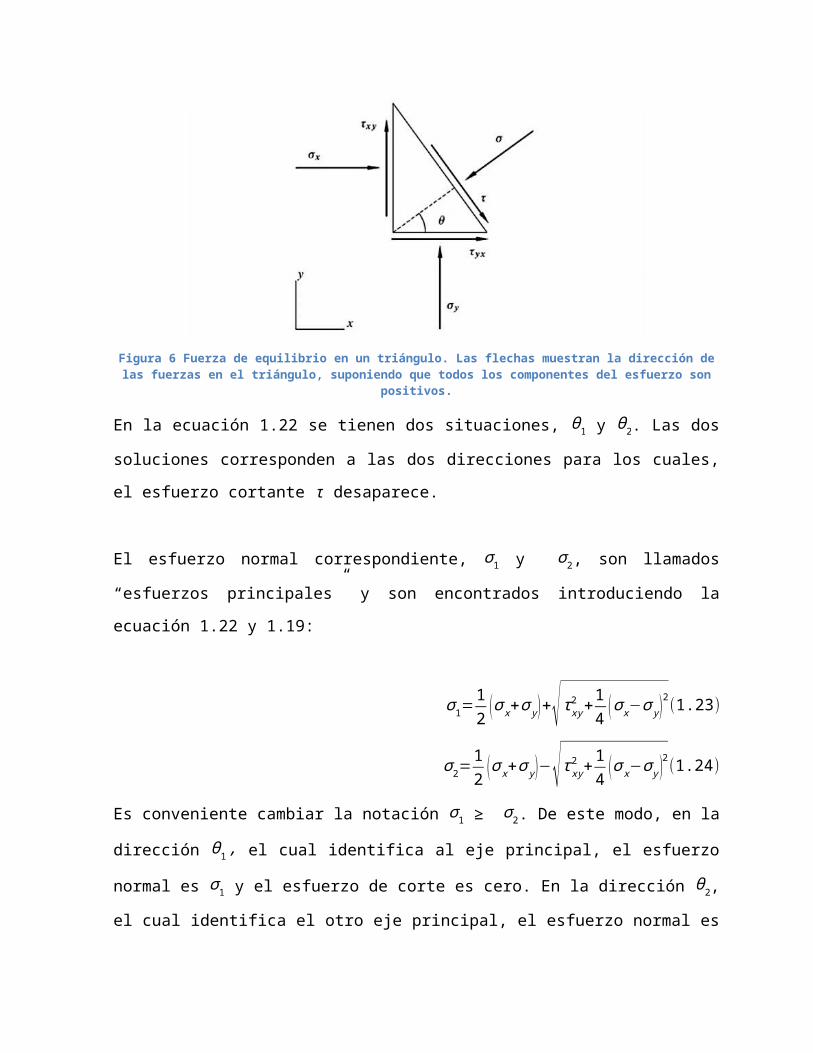
Figura 6 Fuerza de equilibrio en un triángulo. Las flechas muestran la dirección delas fuerzas en el triángulo, suponiendo que todos los componentes del esfuerzo son
positivos.
En la ecuación 1.22 se tienen dos situaciones, θ1 y θ2. Las dos
soluciones corresponden a las dos direcciones para los cuales,
el esfuerzo cortante τ desaparece.
El esfuerzo normal correspondiente, σ1 y σ2, son llamados
“esfuerzos principales” y son encontrados introduciendo la
ecuación 1.22 y 1.19:
σ1=12 (σx+σy)+√τxy2 +
14 (σx−σy)
2(1.23)
σ2=12 (σx+σy)−√τxy
2 +14 (σx−σy )2(1.24)
Es conveniente cambiar la notación σ1 ≥ σ2. De este modo, en la
dirección θ1, el cual identifica al eje principal, el esfuerzo
normal es σ1 y el esfuerzo de corte es cero. En la dirección θ2,
el cual identifica el otro eje principal, el esfuerzo normal es
σ2 y el esfuerzo de corte es cero. Los ejes principales son
ortogonales.
Círculo de esfuerzo de Mohr
Frecuentemente es conveniente reorientar el eje cartesiano, así
que ele eje x es paralelo al primer eje principal y el eje y esparalelo al otro. Entonces el esfuerzo σ y τ en dirección θrelativo al eje x llega a ser de las ecuaciones 1.19 y 1.21:
σ=12 (σ1+σ2)+
12 (σ1−σ2)cos2θ(1.25)
τ=−12 (σ1−σ2)sen2θ(1.26)
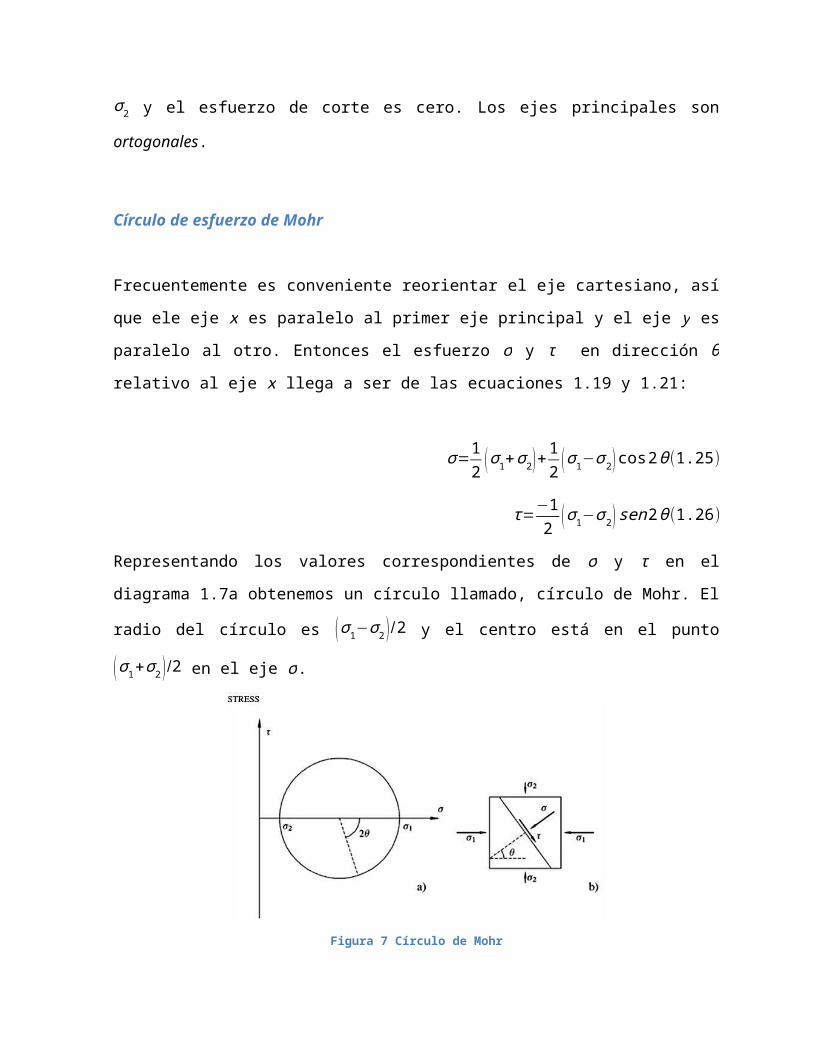
Representando los valores correspondientes de σ y τ en el
diagrama 1.7a obtenemos un círculo llamado, círculo de Mohr. El
radio del círculo es (σ1−σ2 )/2 y el centro está en el punto
(σ1+σ2 )/2 en el eje σ.
Figura 7 Círculo de Mohr
Los esfuerzos σ y τ en cualquier dirección θ (figura 7 b)
corresponden a un punto del círculo de Mohr. En la figura 7 se
ve que el valor absoluto más grande para el esfuerzo de corte
es (σ1−σ2 )/2 y ocurre para θ=3π4
(¿135º ). El círculo de Mohr es
una herramienta muy usada en el análisis de condiciones para
rocas fracturadas.
Esfuerzos principales en tres dimensiones
Ahora para el movimiento en 3 dimensiones, primero tenemos que
decidir cómo identificar una dirección en el espacio. Esto
puede ser hecho por la dirección de los cosenos.
lx=cosαx(1.27)
ly=cosαy(1.28)
lz=cosαz(1.29)

Figura 8 Cosenos direccionales
Los ángulos αx, αy y αz son los ángulos entre nuestras
direcciones seleccionadas y el eje x,y y z, respectivamente
(figura 8). El vector r=(lx,ly,lz) es una unidad de vector en ladirección seleccionada. Note que siempre tenemos
lx2+ly
2+lz2=1(1.30)
Los principales esfuerzos se pueden encontrar mediante la
resolución de σ
|σx−στyz
τxy τxz
σy−σ τyz
τzx τzy σz−σ|=0(1.31)
Las 3 soluciones de esta determinante están en los esfuerzos
principales σ1,σ2 y σ3. Las soluciones son organizadas
convencionalmente, así que, σ1≥σ2≥σ3. La dirección de los
cosenos l1x,l1yyl1z al identificar los principales ejes
correspondientes a σ1 sirven para encontrar la resolución de
las ecuaciones:
l1x (σx−σ1 )+l1yτxy+l1zτxz=0(1.32)
l1xτxy+l1y (σy−σ1)+l1zτyz=0(1.33)
l1xτxz+l1yτyz+l1z (σz−σ1 )=0(1.34)
Los ejes correspondientes para σ2 y σ3 se encuentran de manera
similar mediante la sustitución del subíndice 1 por el
subíndice 2 y 3, respectivamente, en las ecuaciones 1.32 a
1.34.
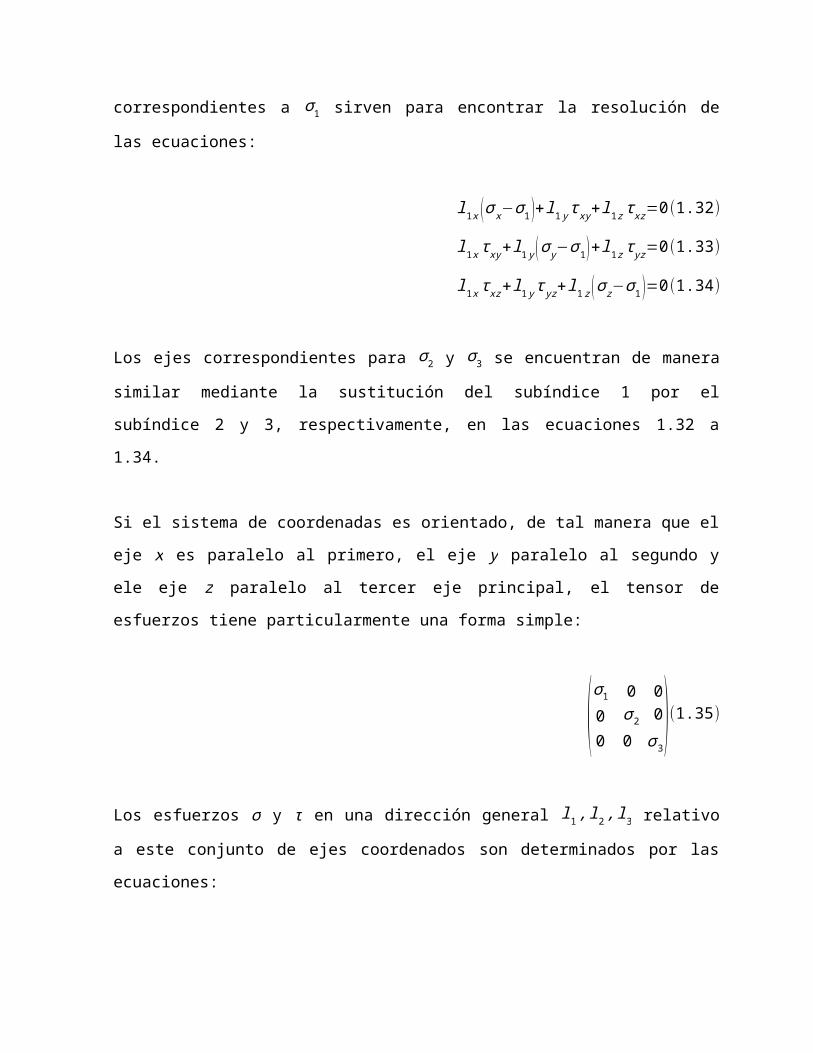
Si el sistema de coordenadas es orientado, de tal manera que el
eje x es paralelo al primero, el eje y paralelo al segundo yele eje z paralelo al tercer eje principal, el tensor de
esfuerzos tiene particularmente una forma simple:
(σ1
00 0σ2 0
0 0 σ3)(1.35)
Los esfuerzos σ y τ en una dirección general l1,l2,l3 relativo
a este conjunto de ejes coordenados son determinados por las
ecuaciones:
l12σ1+l2
2σ2+l32σ3=σ(1.36)
l12σ1
2+l22σ2
2+l32σ3
2=σ2+τ2(1.37)
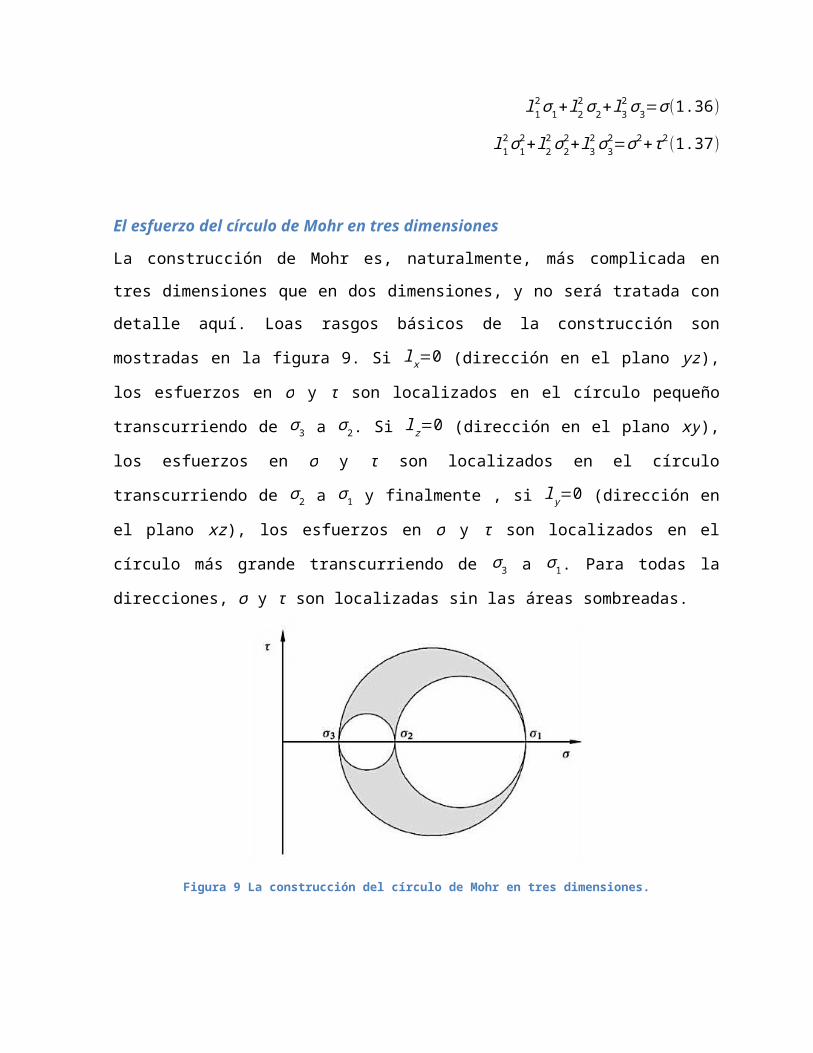
El esfuerzo del círculo de Mohr en tres dimensiones
La construcción de Mohr es, naturalmente, más complicada en
tres dimensiones que en dos dimensiones, y no será tratada con
detalle aquí. Loas rasgos básicos de la construcción son
mostradas en la figura 9. Si lx=0 (dirección en el plano yz),
los esfuerzos en σ y τ son localizados en el círculo pequeño
transcurriendo de σ3 a σ2. Si lz=0 (dirección en el plano xy),
los esfuerzos en σ y τ son localizados en el círculo
transcurriendo de σ2 a σ1 y finalmente , si ly=0 (dirección en
el plano xz), los esfuerzos en σ y τ son localizados en el
círculo más grande transcurriendo de σ3 a σ1. Para todas la
direcciones, σ y τ son localizadas sin las áreas sombreadas.
Figura 9 La construcción del círculo de Mohr en tres dimensiones.
Los esfuerzos invariantes
El tensor de esfuerzo es un tensor de esfuerzo de segundo
orden. Cuando se cambia a una sistema rotado de ejes
coordenados, los componentes del tensor de esfuerzo son
cambiados. Sin embargo, algunos propiedades del tensor de
esfuerzo permanece invariable. Lo más simple de esto es el
significado de esfuerzo normal
σ=σx+σy+σz
3(1.38)
El cual es igual a 13 del indicio de la matriz. El significado
de esfuerzo normal es, de este modo, una invariación del
esfuerzo.
Hay también otra combinación de esfuerzos que son
independientes de los ejes coordenados. Algunas combinaciones
de esfuerzo invariantes, desde luego, será un esfuerzo
invariante también.
Los esfuerzos invariantes usados comúnmente son:
l1=σx+σy+σz(1.39)
l2=−(σxσy+σyσz+σzσx)+τxy2 +τyz
2 +τxz2 (1.40)
l3=σxσyσz+2τxyτyzτxz−σxτyz2 −σyτxz
2 −σzτxy2 (1.41)
Esfuerzos deviatóricos
El significado de esfuerzo normal σ, definida en la ecuación1.38 esencialmente causa compresión o extensión uniforme. La
deformación son esencialmente causados por el tan llamado
esfuerzos deviatóricos. Los esfuerzos deviatóricos son
obtenidos por la resta del significado de esfuerzo normal de
los componentes del esfuerzo normal:
( sx sxysxy sy
sxz
syz
sxz syz sz)=(σx−σ τxy
τxy σy−στxz
τyz
τxz τyz σz−σ)(1.42)
Los invariantes de la desviación de esfuerzos es similar a los
invariantes del esfuerzo definido en las ecuaciones 1.39-1.41,
son dadas por:
J1=sx+sy+sz=0(1.43)
J2=−(sxsy+sysz+szsx)+sxy2 +syz
2 +sxz2 (1.44)
J3=sxsysz+2sxysyzsxz−sxsyz2 −sysxz
2 −szsxy2 (1.45)
Los invariantes J1,J2, J3, y la combinación de ellos, son
independientes de la selección de ejes coordenados. Los
invariantes de desviación de esfuerzos aparecen, por ejemplo,
en el criterio de fallas, desde entonces sería independiente de
la selección de ejes coordenados (para materiales isotrópicos).
Hay muchas formas de escribir las invariantes de la desviación
de esfuerzos.
A menudo se encontrarán varias variantes de los esfuerzos
invariantes, en particular el parámetro q y r, el cual sonrelacionados a los invariantes básicos como:
q=√3J2=√13 [(σ1−σ )2+(σ2−σ )2+(σ3−σ )2](1.46)
r=3√272 J3=3√272 (σ1−σ ) (σ2−σ )(σ3−σ )(1.47)
Para un estado del esfuerzo, en el cual dos de los principales
esfuerzos son iguales (σ2−σ3 ) las expresiones se simplifican a
q=|σ1−σ3|(1.48)
r=σ1−σ3(1.49)
Interpretación geométrica de los invariantes esfuerzos deviatóricos
Los invariantes de los esfuerzos deviatóricos tienen una
sencilla interpretación geométrica en el espacio de los
esfuerzos principales, como es ilustrada en la figura 10. La
ecuación 1.46 es la ecuación del círculo centrado en σ, con los
puntos normales por los ejes hidrostáticos σ1=σ2=σ3. Por lo
tanto, la distancia de un punto (σ1,σ2,σ3 ) en el espacio delesfuerzo principal a los ejes hidrostáticos es
√23 q=√2J2(1.50)

Figura 10 Interpretación geométrica de los invariantes de los esfuerzos deviatóricosen el espacio del esfuerzo principal. Las líneas punteadas son las proyecciones delos ejes del esfuerzo principal en un plano deviatórico (i.e. un plano normal a losejes hidrostáticos σ1=σ2=σ3, también llamados plano π) pasando a través de los
puntos (σ1,σ2,σ3 ). El ángulo ϑ es llamado el lodo el ángulo.
El ángulo ϑ, llamado lodo del ángulo, indicado en la figura 10es dado por la invariante como
cos (3ϑ)=(rq )3
=3√3J3
2J232
(1.51)
(Note que desde los arcos tiene una función multi-evaluada, el
lodo del ángulo calculado de la ecuación 1.51 no es único. Si
uno de los cambios de la división principal de los arcos, el
resultado será 0º a 60º aunque el estado del esfuerzo actual
corresponda a otros valores.)
El esfuerzo octahedral
Un plano normal a la dirección (1, 1, 1) en el espacio del
esfuerzo principal es llamado plano octahedral, un plano π o unplano deviatórico.
El esfuerzo normal en un esfuerzo de corte en este plano son
algunas veces llamado esfuerzo normal octahedral y esfuerzo de corte
octahedral, y son dados por:
σoct=13 (σ1+σ2+σ3 )=σ=
13I1(1.52)
τoct=13 √(σ2−σ3)
2+(σ3−σ1)
2+(σ1−σ2)2=√23J2=
√23q(1.53)
Nota que el esfuerzo normal en la dirección igual inclinada a
los ejes del esfuerzo principal es, por lo tanto, igual al
significado de esfuerzo.
DeformaciónConsiderar una muestra como en la figura 11. La posición de una
partícula específica dentro de la muestra es inicialmente
x,y,z. Después la acción de una fuerza externa, la posición deesta partícula es movida. Denotaríamos si el cambio en la
dirección x por u, el cambio en la dirección y por v, y elcambio en la dirección z por w.
Figura 11 Muestra deformada
Las cantidades u, v y w son llamados remplazo de partículas. Eneste orden para hacer el símbolo del remplazo compatible con
los símbolos del esfuerzo. Por lo tanto, la nueva posición de
la partícula inicial en x,𝑦 y z llegan a ser:
x'=x−u(1.54)
y'=y−v(1.55)
z'=z−w(1.56)
Si la sustitución u, v y w son constantes, i.e. hay lo mismopara cada partícula dentro la muestra, entonces la sustitución
es simplemente una translación de un cuerpo rígido. Otra forma simple
de sustitución es la rotación de un cuerpo rígido. Para una rotación
específica pequeña por ω, donde la magnitud |ω| da un ángulo derotación mientras que la dirección de ω da el eje de rotación,la nueva posición de la partícula se convierte:
r'=r+ωx (r−r0 )(1.57)
Posición
inicial
Posición
modificad
donde r=(x,y,z), r'=(x',y',z' ) y “x” denota el producto cruz. El
vector r0 es el centro de la rotación, por el cual el eje de
rotación gira.
Si la posición relativa de las partículas dentro de las
muestras son cambiadas, así que la nueva posición no puede ser
obtenida de forma simple por la traslación rígida o por la
rotación de una muestra. La figura 11 muestra un ejemplo de
muestra deformada. La sustitución relacionada a la posición OyP no son iguales. La cantidad definida como elongación
corresponde al punto O y a la dirección OP.
ε=L−L'L
=−ΔLL
(1.58)
Se sigue con el símbolo convencional de esfuerzo, requerimos
que la elongación sea positiva para una contracción.
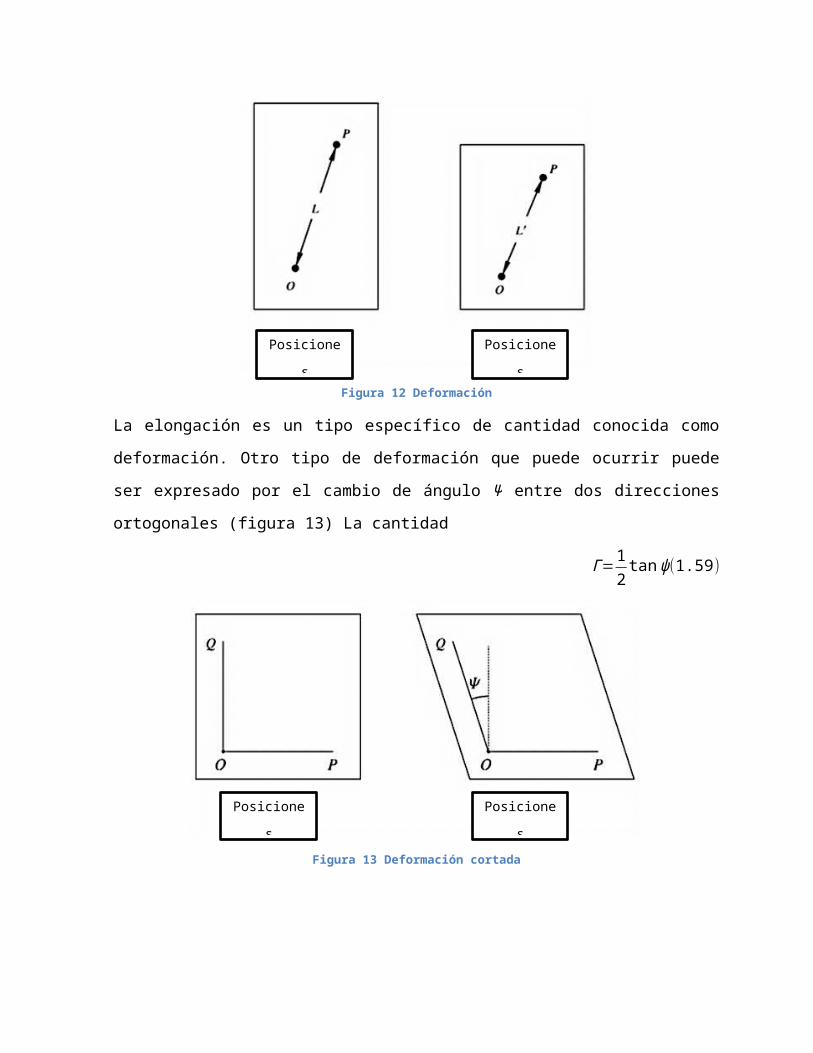
Figura 12 Deformación
La elongación es un tipo específico de cantidad conocida como
deformación. Otro tipo de deformación que puede ocurrir puede
ser expresado por el cambio de ángulo Ψ entre dos direccionesortogonales (figura 13) La cantidad
Γ=12tanψ(1.59)
Figura 13 Deformación cortada
Posicione
s
Posicione
s
Posicione
s
Posicione
s
Para muchas aplicaciones solamente una será tratada con esfuerzo
infinitésimal, el cual implica que el esfuerzo ε y Γ son tan
pequeños que sus productos y cuadrados pueden ser ignorados y
haremos esta siguiente aproximación.
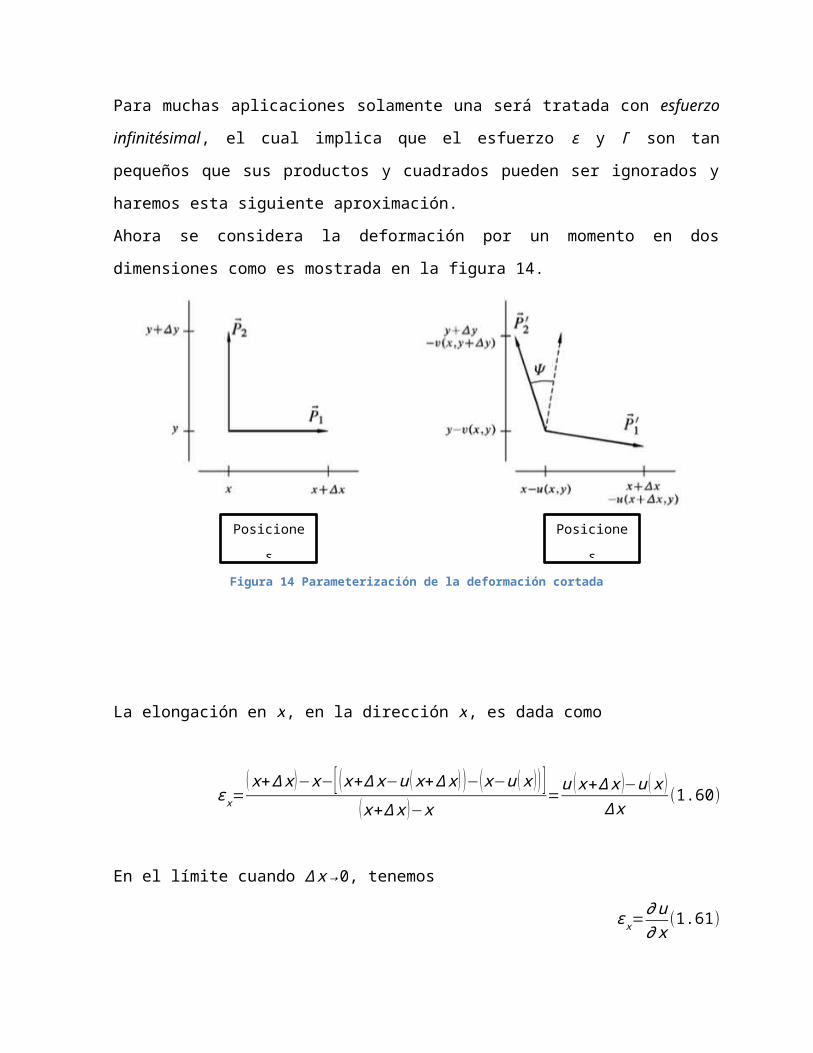
Ahora se considera la deformación por un momento en dos
dimensiones como es mostrada en la figura 14.
Figura 14 Parameterización de la deformación cortada
La elongación en x, en la dirección x, es dada como
εx=(x+Δx)−x−[ (x+Δx−u (x+Δx) )−(x−u (x )) ]
(x+Δx )−x=u (x+Δx )−u (x )
Δx(1.60)
En el límite cuando Δx→0, tenemos
εx=∂u∂x
(1.61)
Posicione
s
Posicione
s
Desde que los esfuerzos son pequeños, encontramos para la
deformación cortada correspondiente a la dirección x
Γxy=12tanψ≈ 1
2sinψ=
−12cos(π2+ψ)=−1
2P1'. P2
'
|P1
→ |.|P2→ |¿)
Los vectores P1,P1',P2,P2' son encontrados en la figura 14.
Cuando Δx→0, Δy→0 y los cuadrados y productos de la
deformación son abandonados, encontramos que
Γxy=12 (∂u∂y+
∂y∂x )(1.63)
Esto es despejado de la ecuación 1.63, que el esfuerzo cortado
corresponde a la dirección y, Γyx es igual a Γxy.
Dar una descripción completa del estado de la deformación en un
punto en tres dimensiones, la elongación y la deformación
cortada correspondiente a todos los 3 ejes sería especificado.
De acuerdo con la las ecuaciones 1.61 y 1.63, estos esfuerzos
son definidos como:
εx=∂u∂x
(1.64)
εy=∂v∂y
(1.65)
εz=∂w∂z
(1.66)
Γxy=Γyx=12 (∂u∂y+
∂v∂x )(1.67)
Γxz=Γzx=12 (∂u∂z+
∂w∂x )(1.68)
Γyz=Γzy=12 (∂v∂z+
∂w∂y )(1.69)
El tensor de deformación y las deformaciones invariantes
El tensor de la deformación es
ε=( εx Γxy
Γyx εyΓxz
Γyz
Γxz Γyz εz)(1.70)
El trazo de tensor de deformación
εvol=εx+εy+εz(1.71)
Es idéntico a la deformación volumétrica, i.e. el volumen
relativo decrece. La deformación volumétrica es independiente
en la selección de ejes coordenados, y así una invariante de
deformación. Similar a las invariantes de deformación de las
ecuaciones 1.40-1.41
J2=−(εxεy+εyεz+εzεx)+Γxy2 +Γyz
2 +Γxz2 (1.72)
J3=εxεyεz+2ΓxyΓyzΓxz−εxΓyz2 −εyΓxz
2 −εzΓxy2 (1.73)
son también invariantes de la deformación.
Hay también una notación matemática para la deformación,
similar a la ecuación 1.9. En esta notación todas las
deformaciones son definidas por
εij=12 (∂ui
∂xj+∂uj
∂xi )(1.74)
El subíndice i y j pueden ser cualquiera de los números 1, 2, 3presentando los ejes x, y, y z, respectivamente. Así,
u1=u,u2=v,u3=w,mientras x1=x,x2=y,x3=z. Entonces tenemos
ε11=εx,ε13=Γxz etc.
En esta notación de tensor de deformación se convierte
(ε11 ε12ε12 ε22
ε13ε23
ε13 ε23 ε33)(1.75)
Condiciones de compatibilidad
Notemos que de la definición general de deformación (ecuación
1.74) todas las deformaciones son derivativas ( en varias
combinaciones) de los componentes del vector remplazado
u=(u1,u2u3 ). Algunas expresiones útiles pueden ser derivadas deeste hecho. Por ejemplo, observamos que la ecuación (1.71 y
1.74) que la deformación volumétrica εvolem es igual a la
divergencia de u, i.e.
εvol=∨.u=−dVV
(1.76)
El signo de menos es debido al signo convencional de la
deformación. Otras relaciones pueden ser obtenidas por
comparación de algunas de las segundas derivadas de la
deformación. Encontramos e.g.
∂2∂εx∂y2 +
∂2εy
∂x2 =2∂2Γxy∂x∂y (¿ ∂3u
∂x∂y2+∂3v
∂y∂x2 )(1.77)
∂2εx∂z2
+∂2εz
∂x2 =2∂2Γxz∂x∂z (¿ ∂3u
∂x∂z2+∂3w
∂z∂x2 )(1.78)
∂2εz∂y2
+∂2εy∂z2 =2
∂2Γzy∂z∂y (¿ ∂3w
∂z∂y2+∂3v
∂y∂z2 )(1.79)
Estas tres relaciones diferenciales , junto con otras tres que
expresan ∂2εx
∂y∂z,
∂2εy
∂x∂z y
∂2εz
∂x∂y en términos de la segunda
derivada de la deformación cortada son conocidas como condiciones
compatibles de la deformación.
Deformaciones principales
En la parte de esfuerzos vimos que para algunas direcciones
específicas desaparece el esfuerzo cortante, así que para la
orientación específica del sistema coordenado (con los ejes
paralelos al eje principal del esfuerzo) el tensor de esfuerzos
llega a ser particularmente simple. La situación es similar
para la deformación.
En dos dimensiones, esto puede ser mostrado que la deformación
cortante desaparece en la dirección θ relativa al eje x, elcual satisface la ecuación:
tan2θ=2Γxyεx−εy
(1.80)
Por lo tanto, en dos dimensiones, hay dos direcciones
ortogonales por el cual la deformación cortante desaparece.
Estas direcciones son llamadas ejes principales de la deformación. Las
elongaciones en las direcciones de los ejes principales de la
deformación son llamados deformaciones principales.
En las tres dimensiones hay tres ejes principales de
deformación. La principal deformación se encuentra por la
solución de la determinante
|ϵx−ε Γxy
Γxy ϵy−εΓxz
Γyz
Γxz Γyz ϵz−ε|=0(1.81)
Las soluciones son denotadas ε1, ε2, ε3. La dirección de cosenos
l1x,l1y,l1z identificando los ejes principales correspondiendo a
ε1 se encuentra por la solución de las ecuaciones
l1x (εx−ε1)+l1yΓxy+l1zΓxz=0(1.82)
l1xΓxy+l1y (εy−ε1 )+l1zΓyz=0(1.83)
l1xΓxz+l1yΓyz+l1z (εz−ε1 )=0(1.84)
Los principales ejes correspondientes a ε2y ε3 se encuentran de
forma similar por la sustitución del subíndice 1 y 2,
respectivamente. Las ecuaciones (1.81 y 1.82-1.84) son
equivalentes a las ecuaciones (1.31 y 1.32-1.34) identificando
los esfuerzos principales y los ejes principales del esfuerzo.
Deformación plana y esfuerzo plano
En varias aplicaciones prácticas es bueno suponer que todos los
cortes transversales por los ejes dados son de la misma
condición y que no hay sustitución de los ejes. Ese estado de
deformación se llama deformación plana.
A continuación se supondremos un eje único para ser el eje z.El tensor de la deformación para la deformación plana es
entonces,
( εx (x,y ) Γxy (x,y )Γxy (x,y ) εy (x,y )
00
0 0 0)(1.85)
donde todos los componentes de la deformación son
independientes de z. El término plano por supuesto se refiereal hecho que la deformación es limitada al plano.
Si sólo hemos sustituido por z, y esta sustitución es
independiente de z, el estado de la deformación se refiere a undeformación antiplana. El tensor de la deformación es entonces,
( 0 00 0
Γxz (x,y)Γyz (x,y)
Γxy (x,y ) Γyz (x,y) 0 )(1.86)
donde otra vez todos los componentes son independientes de z.Una situación general en el cual la sustitución por ele eje zes independiente de z se puede descomponer en una suma de
deformación plana y la deformación antiplana. Este estado de
deformación se refiere a una deformación plana generalizada. El
tensor de la deformación es
( εx (x,y ) Γxy (x,y )Γxy (x,y ) εy (x,y )
Γxz (x,y)Γyz (x,y)
Γxy (x,y ) Γyz (x,y) 0 )(1.87)
Note, sin embargo, que el concepto de plano generalizado de la
deformación no es una definición única en la literatura.
Algunas veces el término es usado cuando εz más que la
sustitución por z es independiente de z. Esto lleva al tensorde deformación
( εx (x,y ) Γxy (x,y )Γxy (x,y ) εy (x,y )
Γxz (x,y)Γyz (x,y)
Γxy (x,y ) Γyz (x,y) εz (x,y ) )(1.88)
De forma similar, si todos los componentes de la deformación
son independientes de z y σz=τxz=τyz=0 (aún tomando z como único
eje), llamamos esta situación como esfuerzo plano. El tensor de
esfuerzos es entonces
( σx (x,y ) τxy (x,y )τxy (x,y ) σy (x,y )
00
0 0 0)(1.89)
El esfuerzo plano generalizado es usado cuando todos los
componentes son independientes de z, llevando al tensor delesfuerzo
( σx (x,y ) τxy (x,y )τxy (x,y ) σy (x,y )
τxz (x,y)τyz (x,y)
τxz (x,y ) τyz (x,y) σz (x,y ) )(1.90)
Módulos elásticos
La teoría de la elasticidad lineal se da con situaciones donde
hay relación lineal entre los esfuerzos aplicados y la
deformación resultante. Mientras muchas rocas tienen un
comportamiento no lineal cuando se someten a grandes
esfuerzos, su comportamiento normalmente puede ser descrito por
una relación lineal para cambios esfuerzos pequeños.
Considerar una muestra de longitud L y un área de corte
transversal A=D2 (figura 15). Cuando la fuerza F es aplicada enel final de superficie la longitud de la muestra es reducida a
L'. El esfuerzo aplicado es entonces σx=FA y la elongación
correspondiente es εx=(L−L' )L
. Si la muestra se comporta
linealmente hay una relación lineal entre σx y εz, el cual
podemos escribir como
εx=1Eσx(1.91)
La ecuación 1.91 es conocida como la Ley de Hooke, mientras que
el coeficiente E es llamado módulo de Young o simplemente Módulo-
E. Los módulos de Young pertenece al grupo de coeficientes
llamados módulos elásticos. Es una medida de la rigidez de la
muestra, i.e. la resistencia de la muestra contra lo comprimido
por el esfuerzo uniaxial.
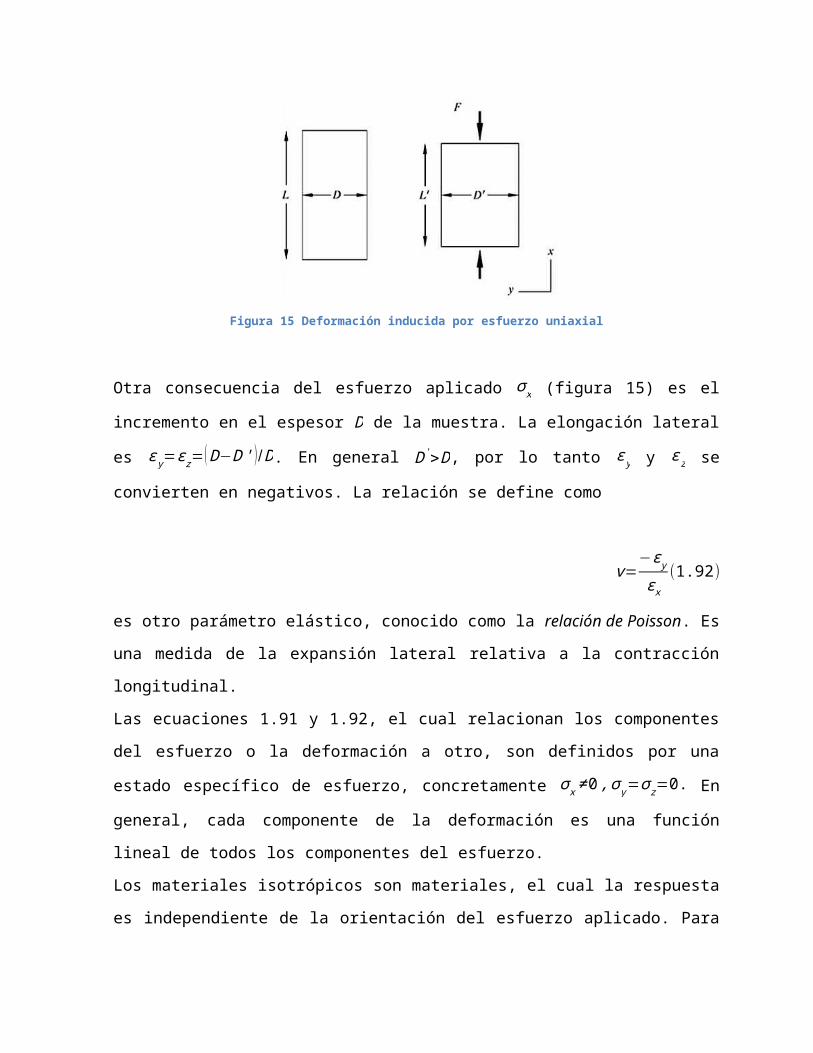
Figura 15 Deformación inducida por esfuerzo uniaxial
Otra consecuencia del esfuerzo aplicado σx (figura 15) es el
incremento en el espesor D de la muestra. La elongación lateral
es εy=εz=(D−D' )/D. En general D'>D, por lo tanto εy y εz se
convierten en negativos. La relación se define como
v=−εyεx
(1.92)
es otro parámetro elástico, conocido como la relación de Poisson. Es
una medida de la expansión lateral relativa a la contracción
longitudinal.
Las ecuaciones 1.91 y 1.92, el cual relacionan los componentes
del esfuerzo o la deformación a otro, son definidos por una
estado específico de esfuerzo, concretamente σx≠0,σy=σz=0. En
general, cada componente de la deformación es una función
lineal de todos los componentes del esfuerzo.
Los materiales isotrópicos son materiales, el cual la respuesta
es independiente de la orientación del esfuerzo aplicado. Para
tales materiales los ejes principales del esfuerzo y los ejes
principales de la deformación siempre coindicen. Para
materiales isotrópicos las relaciones generales entre los
esfuerzos y la deformaciones pueden escribirse así
σx=(λ+2G )εx+λεy+λεz(1.93)
σy=λεx+ (λ+2G)εy+λεz(1.94)
σz=λεx+λεy+(λ+2G )εz(1.95)
τyz=2GΓyz(1.96)
τxz=2GΓxz(1.97)
τxy=2GΓxy(1.98)
Los coeficientes λ y G son módulos elásticos, conocidos comoparámetros de Lamé. G es también conocido como el módulo de larigidez o el módulo de corte. G es la medida de la resistenciade la muestra contra el corte de la deformación.
Otro módulo elástico importante es el módulo de masa K. Se
define como la relación de los esfuerzos hidrostáticos σp
relativa a la deformación volumétrica εvol (ecuación 1. 71).
Para un estado de esfuerzo hidrostático tenemos σp=σx=σy=σz
mientras τxy=τyz=τxz=0 de las ecuaciones 1.93-1.95 encontramos
entonces
K=σp
εvol=λ+2
3G(1.99)
K es la cantidad de la resistencia de la muestra contra lacompresión hidrostática. El inverso de K, i.e. 1 /K, es conocidocomo compresibilidad.
En el experimento de la figura 15 definiendo el módulo de Young
y la relación de Poisson, el esfuerzo es uniaxial, i.e.
σy=σz=τxy=τyz=τxz=0. De las ecuaciones 1.93-1.95 encontramos
entonces
E=σx
εx=G3λ+2G
λ+G(1.100)
v=−εyεx
=λ
2 (λ+G)(1.101)
De las relaciones 1.99-1.101, puede ser visto que cuando
cualquiera de los dos de los módulos E,v,λ,G y K son
definidos, los siguientes son fijados por estas relaciones.
Dependiendo en cual de los dos de módulos son conocidos, las
combinaciones especiales de las ecuaciones 1.99-1-101 puede ser
necesaria. Algunas de las combinaciones más usadas son
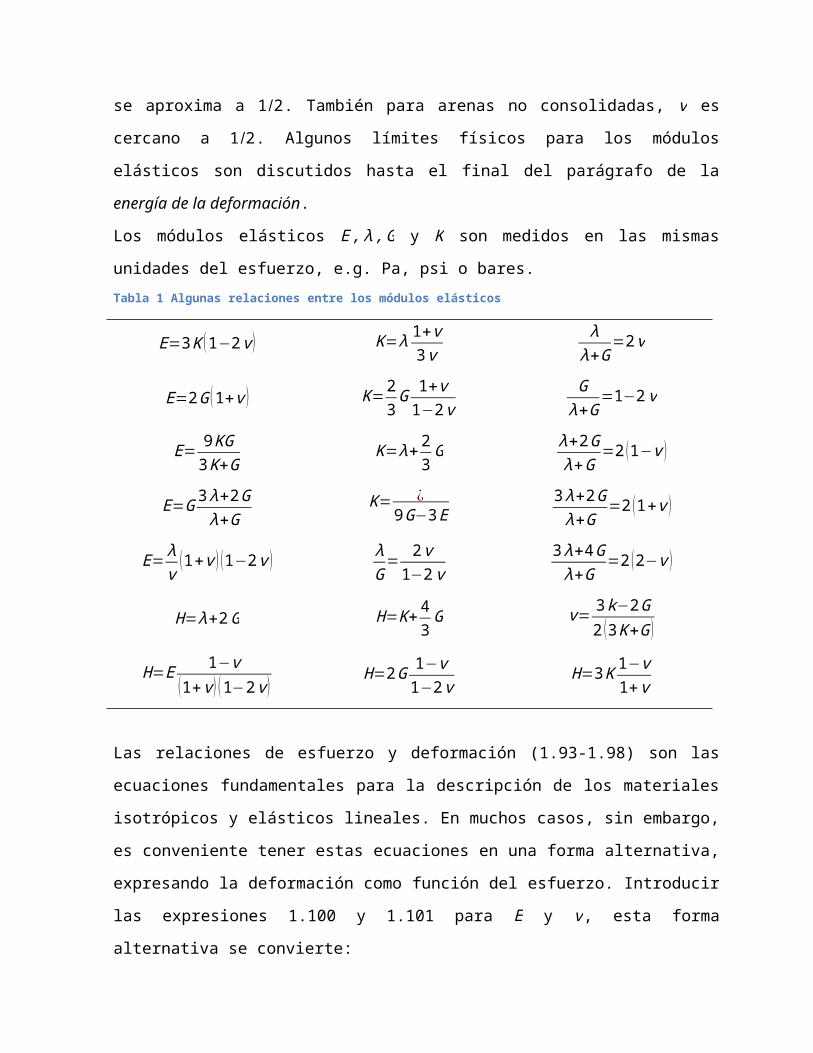
enlistadas en la tabla 1.
La tabla 1 también incluye algunas relaciones abarcando H=λ+2G, los módulos de compactación uniaxial o los módulos oedométricos. En el
contexto de la acústica, H se refiere como el plano del módulo de
la onda o el módulo de la onda P.
Para las rocas, el relación de Poisson es típicamente 0.15-
0.25. Para las rocas porosas v puede ser acercarse a cero oinclusive puede ser negativa. Para los fluidos, la rigidez Gdesparece, el cual de acuerdo a la ecuación 1.101 implica que v
se aproxima a 1 /2. También para arenas no consolidadas, v escercano a 1 /2. Algunos límites físicos para los módulos
elásticos son discutidos hasta el final del parágrafo de la
energía de la deformación.
Los módulos elásticos E,λ,G y K son medidos en las mismas
unidades del esfuerzo, e.g. Pa, psi o bares. Tabla 1 Algunas relaciones entre los módulos elásticos
E=3K (1−2v) K=λ 1+v3v
λλ+G
=2v
E=2G (1+v ) K=23G 1+v1−2v
Gλ+G
=1−2v
E= 9KG3K+G
K=λ+23G λ+2G
λ+G=2 (1−v )
E=G 3λ+2Gλ+G
K= ¿9G−3E
3λ+2Gλ+G
=2 (1+v )
E=λv (1+v ) (1−2v ) λ
G=
2v1−2v
3λ+4Gλ+G
=2 (2−v )
H=λ+2G H=K+43G v= 3k−2G
2 (3K+G )
H=E 1−v(1+v) (1−2v)
H=2G 1−v1−2v
H=3K 1−v1+v
Las relaciones de esfuerzo y deformación (1.93-1.98) son las
ecuaciones fundamentales para la descripción de los materiales
isotrópicos y elásticos lineales. En muchos casos, sin embargo,
es conveniente tener estas ecuaciones en una forma alternativa,
expresando la deformación como función del esfuerzo. Introducir
las expresiones 1.100 y 1.101 para E y v, esta forma
alternativa se convierte:

Eεx=σx−v (σy+σz)(1.102)
Eεy=σy−v (σx+σz)(1.103)
Eεz=σz−v (σx+σy )(1.104)
GΓyz=12τyz(1.105)
GΓxz=12τxz(1.106)
GΓxy=12τxy(1.107)
Las relaciones de esfuerzo y deformación pueden ser escritas en
una forma más compacta
σij=λεvolδij+2Gεij(1.108)
donde δij es el símbolo de Kronecker.
En concepto de deformación plana se introdujo en el parágrafo
de “deformación plana y esfuerzo plano”. Considere una vez más
la situación de la figura 15, pero ahora supondremos que el
cuerpo es constreñido de tal forma que no hay deformación en la
dirección z, i.e. es un estado de deformación plana.
Introduciendo εz=0 y σy=0 en las ecuaciones 1.102-1.104
encontramos una ecuación correspondiente a la ecuación 1.91
E'=σx
εx=
E1−v2=
2G1−v
(1.109)
E' es llamado el módulo de la deformación plana desde que se
muestra en problemas de deformación plana.
La energía de la deformaciónUn cuerpo deformado posee una energía potencial el cual puede
ser liberado durante una descarga. Considerar un cubo pequeño
de un material, el cual el lado a, cargado uniaxialmente con elesfuerzo σ. La elongación resultante es ε=σ /E. El trabajo hecho
por el incremento del esfuerzo es de 0 aσ1.
Trabajo=Fuerzapordistancia
¿∫0
σ1
(a2σ ) (adε)=a3∫0
σ1
σ 1E dσ=12a3 σ1
2
E =12a3Eε1
2=12a3σ1ε1(1.110)
donde ε1=σ1/E. Como el estado de esfuerzo en este caso es
uniaxial, σ1 es un esfuerzo principal mientras que ε1 es una
deformación principal. Cuando los otros dos esfuerzos no son
cero, los términos correspondientes sumarán la expresión para
el trabajo. El trabajo por unidad de volumen (= energía
potencial por unidad de volumen), entonces se convierte en
W=12 (σ1ε1+σ2ε2+σ3ε3)(1.111)
W es llamado energía de la deformación.Una variedad de las expresiones para la energía de la
deformación puede ser obtenida por la sustitución apropiada
para los esfuerzos principales o las deformaciones principales.
Usando las ecuaciones 1.93-1.95 para expresar los esfuerzos en
términos de la deformación, encontramos que la energía de la
deformación es igual a:
W=2 [ (λ+2G) (ε12+ε12+ε2
2+ε32)+2λ (ε1ε2+ε1ε3+ε2ε3 ) ](1.112)
Comparando con las ecuaciones 1.71-1.73 para las invariantes de
la deformación, encontramos que la energía de la deformación
también puede ser expresada como:
W=12 [ (λ+2G)εvol
2 +4GJ2 ]=12 [(λ+2G ) (ε12+ε12+ε2
2+ε32)+2λ (εxεy+εyεz+εzεx )+4G (Γxy2 +Γyz
2 +Γxz2 )](1.113)
Las relaciones útiles pueden ser establecidas por el análisis
de la energía de la deformación. Tomando la derivada de la
ecuación 1.113 con respecto εx, usando la ecuación 1.93,
encontramos que:
∂W∂εx
=12 [2 (λ+2G )εx+2λ (εy+εz) ](1.114)
Expresiones similares que conectan σy a εy, etcétera, también
pueden ser establecidas en la misma manera. Ahora observamos,
que tomando la derivada de la ecuación 1.114 con respecto a εy,
que es imposible establecer un conjunto de expresiones del
tipo:
∂σx
∂εy=
∂2W∂εy∂εx
=∂σy
∂εx(1.115)
Esta ecuación da el ascenso general restricción simétrica en el
módulo elástico.
Regresando a la ecuación 1.110, observamos que el módulo de
Young E no sería negativo, a parte de eso, el sistema sería
inestable (E<0 implica que ε1→∞ será enérgicamente favorable).
Al considerar otras geometrías del esfuerzo, similarmente
podemos mostrar que también el módulo cortante G y el módulo demasa K no serían negativos. Eso se deduce de la tabla 1 que larelación de Poisson v es entonces limitada para estar en laregión −1<v<1 /2. (Note que estas limitaciones son derivadas
suponiendo que el material es isotrópico y linealmente
elástico.)




















