Backpropagation to train an evolving radial basis function neural network
8
ORIGINAL PAPER Backpropagation to train an evolving radial basis function neural network Jose ´ de Jesu ´s Rubio • Diana M. Va ´zquez • Jaime Pacheco Received: 23 October 2009 / Accepted: 21 August 2010 / Published online: 25 September 2010 Ó Springer-Verlag 2010 Abstract In this paper, a stable backpropagation algo- rithm is used to train an online evolving radial basis function neural network. Structure and parameters learning are updated at the same time in our algorithm, we do not make difference in structure learning and parameters learning. It generates groups with an online clustering. The center is updated to achieve the center is near to the incoming data in each iteration, so the algorithm does not need to generate a new neuron in each iteration, i.e., the algorithm does not generate many neurons and it does not need to prune the neurons. We give a time varying learning rate for backpropagation training in the parameters. We prove the stability of the proposed algorithm. Keywords Evolving systems Fuzzy neural networks Clustering Backpropagation Stability 1 Introduction In the last few years, the application of fuzzy neural networks to nonlinear system identification has been a very active area (Lin 1994; Mitra and Hayashi 2000). Fuzzy and neural net- works modeling involves structure and parameters identifi- cation. The parameters identification is usually addressed by some gradient descent variant, i.e., the least square algorithm and backpropagation. In this paper online identification is addressed (Angelov and Zhou 2006; Lughofer and Angelov 2009). The nonlinear system identification can be used for classification or for control (Iglesias et al. 2010). In online identification, model structure and parameters identification are updated immediately after each input– output pair has been presented, i.e., after each iteration. Online identification also includes: (i) model structure and (ii) parameters identification. There are some interesting methods which work online in the literature. In Juang and Lin (1998), the input space is partitioned according to an aligned clustering-based algorithm. After the number of rules is decided, the parameters are tuned by recursive least square algorithm, it is called SONFIN. In Wang (1997), it is the recurrent case of the above case, it is called RSONFIN. In Tzafestas and Zikidis (2001), the input space is automatically partitioned into fuzzy subsets by adaptive resonance theory mechanism. Fuzzy rules that tend to give high output error are split in two, by a specific fuzzy rule splitting procedure. In Kasabov (2001), he proposes that the radius to make clustering updates. In Angelov and Filev (2004a), it is considered that if a new data, which is accepted as a focal point of a new rule is too close to a previously existing rule then the old rule is replaced by the new one, but the self-constructing neural fuzzy networks above do not have a pruning method, though they can be used for on-line learning. In order to extract fuzzy rules in a growing fashion from a large numerical data-base, some self-constructing fuzzy networks have been presented. The self-organizing fuzzy neural network (SOFNN) (Leng et al. 2005) approach proposes a pruning method devised from the optimal brain surgeon (OBS) approach (Hassibi and Stork 1993). The basic idea of the SOFN N is to use the second derivative information to find the unimportant neuron. In the simplified method for learning evolving Takagi-Sugeno fuzzy models (simpl_eTS) given in Angelov and Filev (2005), they introduce the population, J. de Jesu ´s Rubio (&) D. M. Va ´zquez J. Pacheco Seccion de Estudios de Posgrado e Investigacion, ESIME Azcapotzalco, Instituto Polite ´cnico Nacional, Av. De las Granjas, No. 682, Col. Sta. Catarina. Azcapotzalco, 02250 Mexico, D.F., Mexico e-mail: [email protected] 123 Evolving Systems (2010) 1:173–180 DOI 10.1007/s12530-010-9015-9 Author's personal copy
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Backpropagation to train an evolving radial basis function neural network
ORIGINAL PAPER
Backpropagation to train an evolving radial basis functionneural network
Jose de Jesus Rubio • Diana M. Vazquez •
Jaime Pacheco
Received: 23 October 2009 / Accepted: 21 August 2010 / Published online: 25 September 2010
� Springer-Verlag 2010
Abstract In this paper, a stable backpropagation algo-
rithm is used to train an online evolving radial basis
function neural network. Structure and parameters learning
are updated at the same time in our algorithm, we do not
make difference in structure learning and parameters
learning. It generates groups with an online clustering. The
center is updated to achieve the center is near to the
incoming data in each iteration, so the algorithm does not
need to generate a new neuron in each iteration, i.e., the
algorithm does not generate many neurons and it does not
need to prune the neurons. We give a time varying learning
rate for backpropagation training in the parameters. We
prove the stability of the proposed algorithm.
Keywords Evolving systems � Fuzzy neural networks �Clustering � Backpropagation � Stability
1 Introduction
In the last few years, the application of fuzzy neural networks
to nonlinear system identification has been a very active area
(Lin 1994; Mitra and Hayashi 2000). Fuzzy and neural net-
works modeling involves structure and parameters identifi-
cation. The parameters identification is usually addressed by
some gradient descent variant, i.e., the least square algorithm
and backpropagation. In this paper online identification is
addressed (Angelov and Zhou 2006; Lughofer and Angelov
2009). The nonlinear system identification can be used for
classification or for control (Iglesias et al. 2010).
In online identification, model structure and parameters
identification are updated immediately after each input–
output pair has been presented, i.e., after each iteration.
Online identification also includes: (i) model structure and
(ii) parameters identification. There are some interesting
methods which work online in the literature. In Juang and
Lin (1998), the input space is partitioned according to an
aligned clustering-based algorithm. After the number of
rules is decided, the parameters are tuned by recursive least
square algorithm, it is called SONFIN. In Wang (1997), it
is the recurrent case of the above case, it is called
RSONFIN. In Tzafestas and Zikidis (2001), the input space
is automatically partitioned into fuzzy subsets by adaptive
resonance theory mechanism. Fuzzy rules that tend to give
high output error are split in two, by a specific fuzzy rule
splitting procedure. In Kasabov (2001), he proposes that
the radius to make clustering updates. In Angelov and Filev
(2004a), it is considered that if a new data, which is
accepted as a focal point of a new rule is too close to a
previously existing rule then the old rule is replaced by the
new one, but the self-constructing neural fuzzy networks
above do not have a pruning method, though they can be
used for on-line learning. In order to extract fuzzy rules in a
growing fashion from a large numerical data-base, some
self-constructing fuzzy networks have been presented. The
self-organizing fuzzy neural network (SOFNN) (Leng et al.
2005) approach proposes a pruning method devised from
the optimal brain surgeon (OBS) approach (Hassibi and
Stork 1993). The basic idea of the SOFN N is to use the
second derivative information to find the unimportant
neuron. In the simplified method for learning evolving
Takagi-Sugeno fuzzy models (simpl_eTS) given in
Angelov and Filev (2005), they introduce the population,
J. de Jesus Rubio (&) � D. M. Vazquez � J. Pacheco
Seccion de Estudios de Posgrado e Investigacion,
ESIME Azcapotzalco, Instituto Politecnico Nacional,
Av. De las Granjas, No. 682, Col. Sta. Catarina. Azcapotzalco,
02250 Mexico, D.F., Mexico
e-mail: [email protected]
123
Evolving Systems (2010) 1:173–180
DOI 10.1007/s12530-010-9015-9 Author's personal copy

they monitor the population of each cluster and if it amounts
to less than 1% of the total data samples, that cluster is
ignored. In the Sequential Adaptive Fuzzy Inference Sys-
tem (SAFIS) given in Rong et al. (2006), it is used one
threshold parameter for adding a rule or neuron and another
threshold parameter for pruning a rule or neuron.
In this paper, we propose the backpropagation algorithm
to train online an evolving radial basis function neural
network. Structure and parameters learning are updated at
the same time in our algorithm, we do not make difference
in structure learning and parameters learning. It generates
groups with an online clustering. The center is updated to
achieve the center is near to the incoming data in each
iteration, so the algorithm does not need to generate a
new neuron in each iteration, i.e., the algorithm does not
generate many neurons and it does not need to prune
the neurons. We give a time varying learning rate for
backpropagation training in the parameters. We prove the
stability of the proposed algorithm.
2 Evolving radial basis function neural network
Consider following unknown discrete-time nonlinear system:
yðk � 1Þ ¼ f Xðk � 1Þ½ � ð1Þ
where Xðk� 1Þ ¼ ½x1ðk� 1Þ. . .xNðk� 1Þ� ¼ ½yðk� 2Þ; . . .;yðk� n� 1Þ;u k� 2ð Þ; . . .;u k�m� 1ð Þ� 2 <N (N = n ? m)
is the input vector, uðk� 1Þj j2�u;yðk� 1Þ is the output of
the plant, f is a general nonlinear smooth function f [ C?.
In the case of Jang and Sun (1997), we consider the
evolving radial basis function neural network as follows:
byðk� 1Þ ¼ aðk� 1Þ=bðk� 1Þ
aðk� 1Þ ¼X
M
j¼1
vjðk� 1Þzjðk� 1Þ; bðk� 1Þ ¼X
M
j¼1
zjðk� 1Þ
zjðk� 1Þ ¼ exp �X
N
i¼1
xiðk� 1Þ� cijðk� 1Þrijðk� 1Þ
� �
" #28
<
:
9
=
;
ð2Þ
where xi(k - 1) are inputs of system (1), (i = 1…N),
cij(k - 1) and rij(k - 1) are the centers and the widths of
the Gaussian functions, respectively, (j = 1…M), vj(k - 1)
is the output of the Gaussian functions.
3 Structure identification
We use the online clustering to train the structure of the
algorithm (Chiu 1994). Choosing an appropriate number of
hidden neurons is important in designing the online clus-
tering for neuro fuzzy systems, because too many hidden
neurons result in a complex evolving system that may be
unnecessary for the problem and it can cause overfitting
(Jang and Sun 1997), whereas too few hidden neurons
produce a less powerful neural system that may be insuf-
ficient to achieve the objective (Soleimani et al. 2010). We
view the number of hidden neurons as a design parameter
and determine it based on the input–output pairs and on the
number of elements of each hidden neuron.
The basic idea is to group the input–output pairs into
clusters and use one hidden neuron for one cluster as in
Kasabov (2001), Soleimani et al. (2010), and Wang
(1997); i.e., the number of hidden neurons equals the
number of clusters.
One of the simplest clustering algorithms is the nearest
neighborhood clustering algorithm. In this algorithm, first
we put the first data as the center of the first cluster. Then, if
the distances of a data to the cluster centers are less than a
pre-specified value (the radius r), put this data into the cluster
whose center is the closest to this data; otherwise, set this
data as a new cluster center. The details are given as follows.
Let xi(k - 1) are newly incoming pattern, then we get:
pðk � 1Þ ¼ max1� j�M
zjðk � 1Þ ð3Þ
If p(k - 1) C r, then a rule or neuron is not generated
and in the case that zj(k - 1) = p(k - 1) we have the
winner rule or neuron cij� ðkÞ; the centers of this rule or
neuron are updated as:
cij� ðkÞ ¼ cij� ðk � 1Þ þ 1
1þ x2i ðk � 1Þ þ c2
ij� ðk � 1Þ� xiðk � 1Þ � cij� ðk � 1Þ� �
ð4Þ
While if zj(k - 1) is not equal to p(k - 1), nothing
happens.
If p(k - 1) \ r, then a new rule or neuron is generated
(each neuron correspond to each center) and M = M ? 1
where r is a selected radius, r 2 0; 1ð Þ: Once a new rule or
neuron is generated, the next step is to assign initial centers
and widths of the corresponding membership functions.
ci;Mþ1ðkÞ ¼ xiðkÞ ri;Mþ1ðkÞ ¼1
xiðkÞ � cij� ðkÞvMþ1ðkÞ ¼ yðkÞ
ð5Þ
where cij� ðkÞ is the winner rule or neuron defined in (4).
Remark 1 The structure identification is a little similar to
the given in Juang and Lin (1998), Juang and Lin (1999),
but they do not take the max of zj(k - 1) as (3), this idea is
taken from the competitive learning of ART recurrent
neural network (Hilera and Martines 1995; Jang and Sun
1997) to get the winner rule or neuron (in the case of ART
is the winner neuron). If the algorithm of Juang and Lin
(1998, 1999) do not generate a new rule or neuron, it does
nothing, in this paper the center is updated as in (4) to
174 Evolving Systems (2010) 1:173–180
123
Author's personal copy
achieve the center is near to the incoming data in each
iteration, in this way, it does not need to generate a new
rule or neuron in each iteration, i.e., it does not generate
many rules or neurons and it does not need to prune the
rules or neurons. This idea is similar to the updating of
weights in the Kohonen recurrent neural network (Hilera
and Martines 1995) (in this case they speak of weights of
their network and we speak about the weights of the
Gaussian function for our network).
4 Parameters identification
We need the stability of the identification of parameters
because this algorithm works online. We will analyze the
stability of centers and the widths of the input of the
Gaussian function and the outputs of the Gaussian function.
We assume from Jang and Sun (1997) that the radial
basis function neural network can approximate nonlinear
functions, then (1) can be written as:
yðk � 1Þ ¼ a�ðk � 1Þ=b�ðk � 1Þ � lðk � 1Þ
a�ðk � 1Þ ¼X
M
j¼1
v�j ðk � 1Þz�j ðk � 1Þ;
b�ðk � 1Þ ¼X
M
j¼1
z�j ðk � 1Þ
z�j ðk � 1Þ ¼Y
N
i¼1
exp �X
N
i¼1
xiðk � 1Þ � c�ijðk � 1Þr�ijðk � 1Þ
!" #28
<
:
9
=
;
ð6Þ
where v�j ðk � 1Þ; c�ijðk � 1Þ and r�ijðk � 1Þ are unknown
parameters which may minimize the modelling error
l(k - 1).
In the case of three independent variables, smooth
function has Taylor formula as:
f ðx1; x2; x3Þ ¼ f ðx10; x20; x30Þ þof ðx1; x2; x3Þ
ox1
x1 � x10ð Þ
þ of ðx1; x2; x3Þox2
x2 � x20ð Þ
þ of ðx1; x2; x3Þox3
x3 � x30ð Þ þ fðk � 1Þ ð7Þ
where f(k - 1) is the remainder of the Taylor formula. If we
let x1, x2, and x3 correspond to cij(k - 1), rij(k - 1),
and vj(k - 1), respectively, x10, x20, and x30 corres-
pond c�ijðk � 1Þ; r�ijðk � 1Þ; and v�j ðk � 1Þ; respectively, let
us define ecijðk � 1Þ ¼ cijðk � 1Þ � c�ijðk � 1Þ; erijðk � 1Þ ¼rijðk � 1Þ � r�ijðk � 1Þ; and evjðk�1Þ¼vjðk�1Þ�v�j ðk�1Þ;then applying the Taylor formula to (2) and (6) and gives:
byðk � 1Þ ¼ yðk � 1Þ þ obyðk � 1Þocijðk � 1Þecijðk � 1Þ
þ obyðk � 1Þorijðk � 1Þerijðk � 1Þ
þ obyðk � 1Þovjðk � 1Þerjðk � 1Þ þ fðk � 1Þ ð8Þ
Using the chain rule, we get:
obyðk�1Þocijðk�1Þ
¼2 vjðk�1Þ� byðk�1Þ� �
zjðk�1Þ xiðk�1Þ� cijðk�1Þ� �
bðk�1Þr2ijðk�1Þ
obyðk�1Þorijðk�1Þ
¼2 vjðk�1Þ� byðk�1Þ� �
zjðk�1Þ xiðk�1Þ� cijðk�1Þ� �2
bðk�1Þr3ijðk�1Þ
obyðk�1Þovjðk�1Þ¼
obyðk�1Þoaðk�1Þ
oaðk�1Þovjðk�1Þ¼
zjðk�1Þbðk�1Þ
We define the identification error as:
eðk � 1Þ ¼ byðk � 1Þ � yðk � 1Þ ð9Þ
So:
byðk�1Þ
¼2 vjðk�1Þ� byðk�1Þ� �
zjðk�1Þ xiðk�1Þ�cijðk�1Þ� �
bðk�1Þr2ijðk�1Þ ecijðk�1Þ
þ2 vjðk�1Þ� byðk�1Þ� �
zjðk�1Þ xiðk�1Þ�cijðk�1Þ� �2
bðk�1Þr3ijðk�1Þ erijðk�1Þ
þ zjðk�1Þbðk�1Þevjðk�1Þþyðk�1Þþ fðk�1Þ ð10Þ
If we define:
D1ijðk� 1Þ ¼2 vjðk� 1Þ� byðk� 1Þ� �
zjðk� 1Þ xiðk� 1Þ� cijðk� 1Þ� �
bðk� 1Þr2ijðk� 1Þ
D2ijðk� 1Þ ¼2 vjðk� 1Þ� byðk� 1Þ� �
zjðk� 1Þ xiðk� 1Þ� cijðk� 1Þ� �2
bðk� 1Þr3ijðk� 1Þ
D3jðk� 1Þ ¼ zjðk� 1Þbðk� 1Þ
ð11Þ
Then (10) is:
byðk � 1Þ ¼ yðk � 1Þ þ D1ijðk � 1Þecijðk � 1Þ þ fðk � 1Þþ D2ijðk � 1Þerijðk � 1Þ þ D3jðk � 1Þevjðk � 1Þ
ð12Þ
In order to assure the stability of identification we use
the following learning law to updated the weights of neural
identifier:
Evolving Systems (2010) 1:173–180 175
123
Author's personal copy

cijðkÞ ¼ cijðk � 1Þ � gðk � 1ÞD1ijðk � 1Þe k � 1ð ÞrijðkÞ ¼ rijðk � 1Þ � gðk � 1ÞD2ijðk � 1Þe k � 1ð ÞvjðkÞ ¼ vjðk � 1Þ � gðk � 1ÞD3jðk � 1Þe k � 1ð Þ
ð13Þ
where j = 1…M, i = 1…N and D1ij(k - 1), D2ij(k - 1),
and D3j(k - 1) are given in (11). The dead-zone is applied
to g(k - 1) as:
gðk � 1Þ ¼g0
1þqðk�1Þ if e2 k � 1ð Þ� f2
1�g
0 if e2 k � 1ð Þ\ f2
1�g
8
<
:
ð14Þ
where q(k - 1) = D1ij2 (k - 1) ? D2ij
2 (k - 1) ? D3j2 (k - 1),
0 \ g0 B 1.
The following theorem gives the stability of neural
identification in the case of centers and widths input of the
Gaussian functions and the outputs of the Gaussian
functions.
Theorem 1 If we use radial basis function neural network
(2) to identify the nonlinear system (1), the learning law
(11), (13) with dead-zone (14) make the identification sta-
ble, i.e., (1) the identification error e(k - 1) is bounded (2)
The identification error e(k - 1) satisfies:
limk!1
e2 k � 1ð Þ ¼ f2
1� g0
ð15Þ
where f is upper bound of f (k - 1).
Proof Please see Appendix for proof of this theorem. h
Remark 2 The normal learning (11), (13) has similar form
as backpropagation (Wang 1997), the only difference is
that we use normalizing learning rate g(k - 1), Wang
(1997) use fixed learning rate. The time-varying learning
rate can assure the stability of the identification error. This
learning rate is easy to get, no any prior information is
required, for example we may select g0 = 0.9.
5 The proposed algorithm
The proposed algorithm is as given in Fig. 1.
Remark 3 The parameters r and g0 are selected to achieve
the best behavior of the algorithm, the other parameters are
are updated by the algorithm. If r is big, the algorithm
generates a high number of neurons, if r is small, the
algorithm generates a low number of neurons, but a too
high or a too low number of neurons could cause a bad
behavior of any algorithm, that is way r is bounded. If g0 is
small, the steps of the algorithm are short, so the algorithm
is slow, if g0 is big, the steps of the algorithm are long, so
the algorithm is fast, but if g0 is too big, it could cause that
the algorithm never reach the minimum, i.e. the algorithm
could become unstable, that is way the parameter g0 is
bounded.
Remark 4 The proposed algorithm is different to the
algorithms proposed by Juang and Lin (1998) and Juang
and Lin (1999) because of three reasons: (1) from Theorem
1 the proposed algorithm is assured to be stable while the
algorithms of Juang and Lin (1998) and Juang and Lin
(1999) are not assured to be stable. It is important to assure
the stability of the algorithms because an algorithm that
becomes unstable could cause damage of the instruments
or could cause accidents in people, (2) in Juang and Lin
(1998) and Juang and Lin (1999) after the number of rules
is decided, the parameters are tuned by recursive least
square algorithm while in the proposed algorithm the
number of rules or neurons and the parameters are updated
in each iteration, and (3) if the algorithms of Juang and Lin
(1998, 1999) do not generate a new rule or neuron, it does
nothing, while if the proposed algorithm does not generate
a new rule or neuron, the winner center is updated as in (4)
to get that the center is near to the incoming data in each
iteration.
Fig. 1 The proposed algorithm
176 Evolving Systems (2010) 1:173–180
123
Author's personal copy

Remark 5 Evolving systems are inspired by the idea of
system model evolution in a dynamically changing and
evolving environment. They use inheritance and gradual
change with the aim of life-long learning and adaptation,
self-organization including system structure evolution in
order to adapt to the (unknown and unpredictable) envi-
ronment as structures for information representation with
the ability to fully adapt their structure and adjust their
parameters (Angelov and Filev 2004b; Angelov et al.
2010). The aim of the life-long learning adaptation is
addressed with Eq. 4 because in this equation the center is
updated to achieve the center is near to the incoming data in
each iteration. The structure is updated with Eqs. 3 and 4.
The parameters learning is updated with Eqs. 2, 9, 11, 13,
and 14. As the three characteristics of the evolving systems
are satisfied, the proposed algorithm is an evolving system.
6 Simulations
In this section, the suggested online self-organized algo-
rithm is applied for nonlinear system identification (Rivals
and Personnaz 2003). Note that in this study, the structure
and parameters learning work at each time-step and they
work online. Two examples are considered in this section.
In the first example, the proposed network will be com-
pared with networks that add and remove neurons online,
such as the Simpl_eTS (Angelov and Filev 2005), the
SOFNN (Leng et al. 2005), and the SAFIS (Rong et al.
2006), because these networks have good performance. In
the second example, the proposed network will be com-
pared with the network that add neurons online called
RSONFIN (Juang and Lin 1999).
The evolving radial basis function neural network as all
the neural networks has a training phase and a testing phase
because they have the capacity to learn a nonlinear behav-
ior. The training phase is where the weights of the evolving
radial basis function neural network are updated to learn a
nonlinear behavior. The testing phase is where the weights
of the evolving radial basis function neural network are not
updated because the evolving radial basis function neural
network ended to learn the nonlinear behavior.
Example 1 Let us consider the nonlinear system given
and used in earlier studies (Rong et al. 2006; Wang 1997):
yðkÞ ¼ yðk � 1Þyðk � 2Þ yðk � 1Þ � 0:5½ �1þ y2ðk � 1Þ þ y2ðk � 2Þ þ uðk � 1Þ ð16Þ
As in the earlier studies (Rong et al. 2006; Wang 1997),
the input u(k) is given by uðkÞ ¼ sinð2pk=25Þ: The three
values y(k - 1), y(k - 2), and u(k - 1) are the inputs of
the networks or systems and y(k) is the output of the
networks or systems.
The parameters of the proposed algorithm are g0 = 0.12,
r = 0.99. For the purpose of training and testing, 5,000 and
200 data are produced, respectively. The average perfor-
mance comparison of the proposed algorithm with the
eTS (Angelov and Filev 2004a) with parameters r = 1.8,
X = 106, the Simpl_eTS (Angelov and Filev 2005) with
parameters r = 2.0, X = 106, and the SAFIS (Rong et al.
2006) with parameters c = 0.997, emax = 1, k = 1, emin =
0.1, eg = 0.05, ep = 0.005 is shown in Table 1, where the
root mean square error (RMSE) (Kasabov 2001) is:
RMSE ¼ 1
N
XN
k¼1
e2ðk � 1Þ !1
2
ð17Þ
From Table 1, it can be seen that the proposed algorithm
achieves similar accuracy when compared with the other
networks. In addition, the proposed algorithm achieves this
accuracy with the smallest number of neurons. The evo-
lution of the neurons for the proposed algorithm for a
typical run is shown in Fig. 2. From this figure, it can be
seen that the proposed algorithm produces 6 neurons and
changes in the behavior are before 500 iterations.
Figure 3 gives a clear illustration of the neuron evolu-
tion tendency from 0 to 500 iterations, and shows how the
proposed algorithm can automatically add a neuron during
learning. In addition, the number of neurons of the pro-
posed algorithm grows very slowly because the centers of
the neurons are updated each iteration.
Figure 4 shows the testing result for the proposed
algorithm, i.e. this figure presents the comparison between
the output of the plant y(k - 1) given by Eq. 1 and the
output of the evolving radial basis function neural network
byðk � 1Þ given by Eq. 2, it is the testing result because it is
the case where the weights of the evolving radial basis
function neural network are not updated (the testing phase).
Example 2 Let us consider the system used in the earlier
study (Juang and Lin 1999):
yðk þ 1Þ
¼ yðkÞyðk � 1Þyðk � 2Þuðk � 1Þ yðk � 2Þ � 1½ � þ uðkÞ1þ y2ðk � 2Þ þ y2ðk � 1Þ
ð18Þ
As in the earlier study (Juang and Lin 1999), the input
u(k) for the testing is given by:
Table 1 Results for Example 1
Methods No. of neurons/
clusters
Training
RMSE
Testing
RMSE
eTS 49 0.0292 0.0212
Simpl_eTS 22 0.0528 0.0225
SAFIS 17 0.0539 0.0221
Proposed algorithm 6 0.0737 0.0225
Evolving Systems (2010) 1:173–180 177
123
Author's personal copy
uðkÞ ¼
sinðpk=25Þ k\250
1 250� k\500
�1 500� k\750
aðkÞ 750� k\1000
8
>
>
<
>
>
:
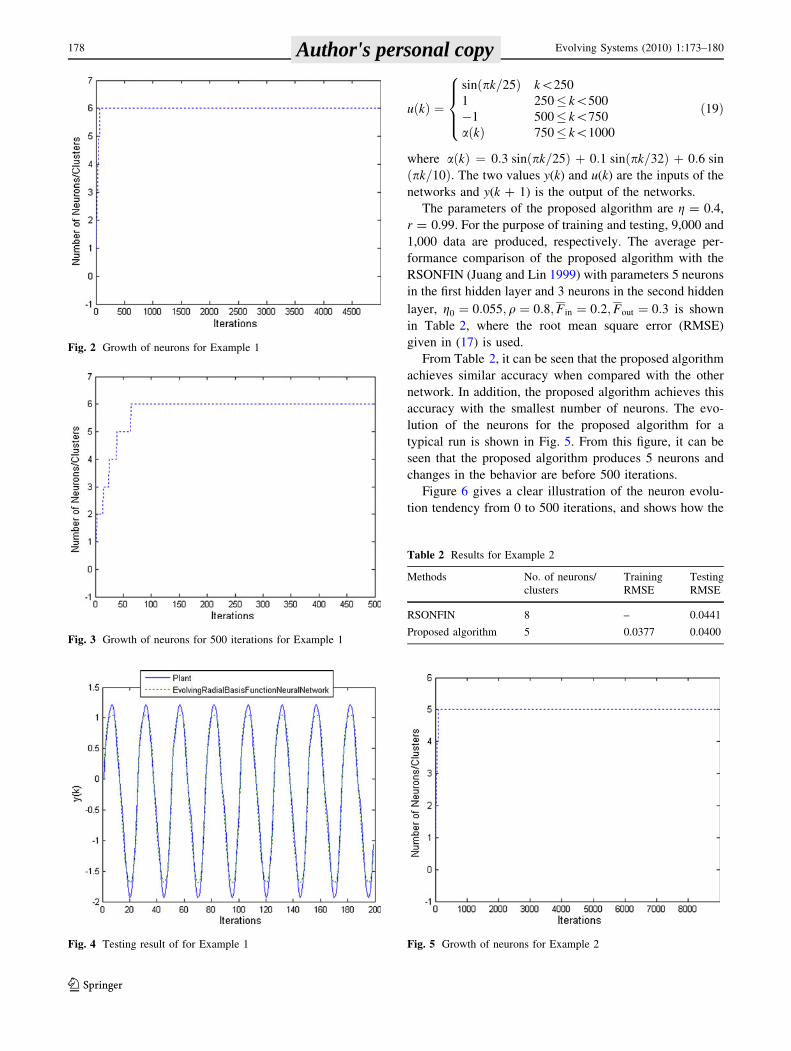
ð19Þ
where aðkÞ ¼ 0:3 sinðpk=25Þ þ 0:1 sinðpk=32Þ þ 0:6 sin
ðpk=10Þ: The two values y(k) and u(k) are the inputs of the
networks and y(k ? 1) is the output of the networks.
The parameters of the proposed algorithm are g = 0.4,
r = 0.99. For the purpose of training and testing, 9,000 and
1,000 data are produced, respectively. The average per-
formance comparison of the proposed algorithm with the
RSONFIN (Juang and Lin 1999) with parameters 5 neurons
in the first hidden layer and 3 neurons in the second hidden
layer, g0 ¼ 0:055; q ¼ 0:8;Fin ¼ 0:2;Fout ¼ 0:3 is shown
in Table 2, where the root mean square error (RMSE)
given in (17) is used.
From Table 2, it can be seen that the proposed algorithm
achieves similar accuracy when compared with the other
network. In addition, the proposed algorithm achieves this
accuracy with the smallest number of neurons. The evo-
lution of the neurons for the proposed algorithm for a
typical run is shown in Fig. 5. From this figure, it can be
seen that the proposed algorithm produces 5 neurons and
changes in the behavior are before 500 iterations.
Figure 6 gives a clear illustration of the neuron evolu-
tion tendency from 0 to 500 iterations, and shows how the
Fig. 2 Growth of neurons for Example 1
Fig. 3 Growth of neurons for 500 iterations for Example 1
Fig. 4 Testing result of for Example 1
Table 2 Results for Example 2
Methods No. of neurons/
clusters
Training
RMSE
Testing
RMSE
RSONFIN 8 – 0.0441
Proposed algorithm 5 0.0377 0.0400
Fig. 5 Growth of neurons for Example 2
178 Evolving Systems (2010) 1:173–180
123
Author's personal copy
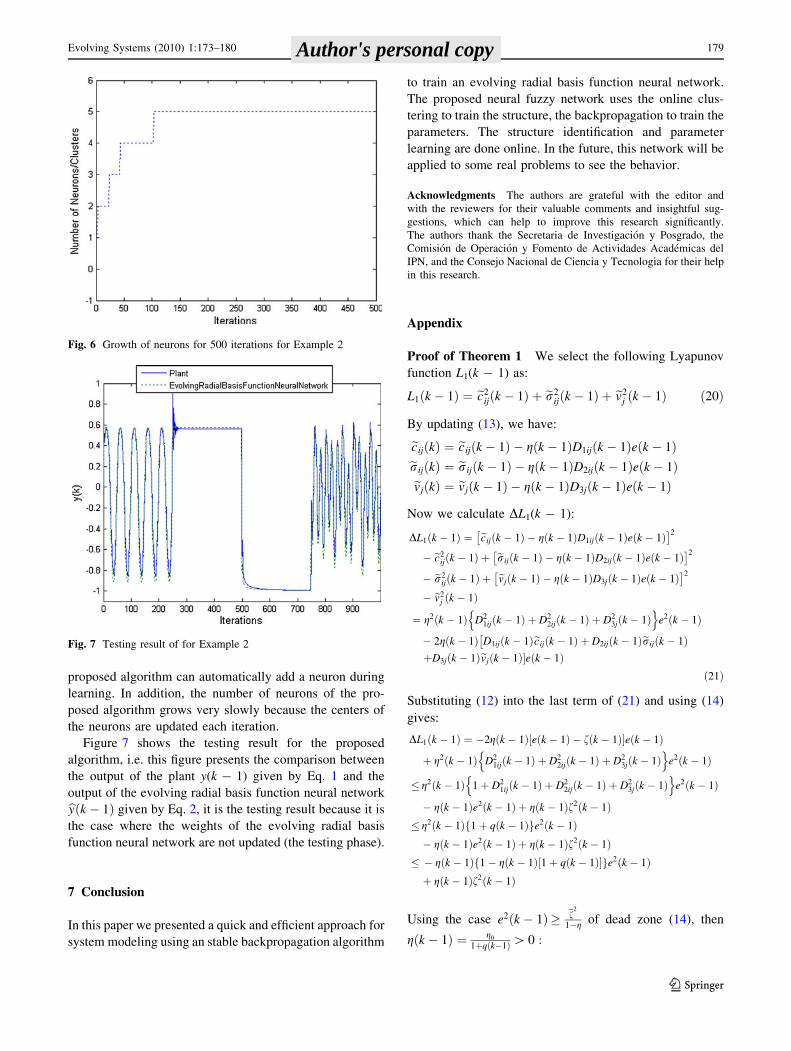
proposed algorithm can automatically add a neuron during
learning. In addition, the number of neurons of the pro-
posed algorithm grows very slowly because the centers of
the neurons are updated each iteration.
Figure 7 shows the testing result for the proposed
algorithm, i.e. this figure presents the comparison between
the output of the plant y(k - 1) given by Eq. 1 and the
output of the evolving radial basis function neural network
byðk � 1Þ given by Eq. 2, it is the testing result because it is
the case where the weights of the evolving radial basis
function neural network are not updated (the testing phase).
7 Conclusion
In this paper we presented a quick and efficient approach for
system modeling using an stable backpropagation algorithm
to train an evolving radial basis function neural network.
The proposed neural fuzzy network uses the online clus-
tering to train the structure, the backpropagation to train the
parameters. The structure identification and parameter
learning are done online. In the future, this network will be
applied to some real problems to see the behavior.
Acknowledgments The authors are grateful with the editor and
with the reviewers for their valuable comments and insightful sug-
gestions, which can help to improve this research significantly.
The authors thank the Secretaria de Investigacion y Posgrado, the
Comision de Operacion y Fomento de Actividades Academicas del
IPN, and the Consejo Nacional de Ciencia y Tecnologia for their help
in this research.
Appendix
Proof of Theorem 1 We select the following Lyapunov
function L1(k - 1) as:
L1ðk � 1Þ ¼ ec2ijðk � 1Þ þ er2
ijðk � 1Þ þ ev2j ðk � 1Þ ð20Þ
By updating (13), we have:
ecijðkÞ ¼ ecijðk � 1Þ � gðk � 1ÞD1ijðk � 1Þe k � 1ð ÞerijðkÞ ¼ erijðk � 1Þ � gðk � 1ÞD2ijðk � 1Þe k � 1ð ÞevjðkÞ ¼ evjðk � 1Þ � gðk � 1ÞD3jðk � 1Þe k � 1ð Þ
Now we calculate DL1(k - 1):
DL1ðk � 1Þ ¼ ecijðk � 1Þ � gðk � 1ÞD1ijðk � 1Þe k � 1ð Þ� �2
� ec2ijðk � 1Þ þ erijðk � 1Þ � gðk � 1ÞD2ijðk � 1Þe k � 1ð Þ
� �2
� er2ijðk � 1Þ þ evjðk � 1Þ � gðk � 1ÞD3jðk � 1Þe k � 1ð Þ
� �2
� ev2j ðk � 1Þ
¼ g2ðk � 1Þ D21ijðk � 1Þ þ D2
2ijðk � 1Þ þ D23jðk � 1Þ
n o
e2 k � 1ð Þ
� 2gðk � 1Þ D1ijðk � 1Þecijðk � 1Þ þ D2ijðk � 1Þerijðk � 1Þ�
þD3jðk � 1Þevjðk � 1Þ�e k � 1ð Þð21Þ
Substituting (12) into the last term of (21) and using (14)
gives:
DL1ðk � 1Þ ¼ �2gðk � 1Þ e k � 1ð Þ � fðk � 1Þ½ �e k � 1ð Þ
þ g2ðk � 1Þ D21ijðk � 1Þ þ D2
2ijðk � 1Þ þ D23jðk � 1Þ
n o
e2 k � 1ð Þ
� g2ðk � 1Þ 1þ D21ijðk � 1Þ þ D2
2ijðk � 1Þ þ D23jðk � 1Þ
n o
e2 k � 1ð Þ
� gðk � 1Þe2 k � 1ð Þ þ gðk � 1Þf2ðk � 1Þ� g2ðk � 1Þ 1þ qðk � 1Þf ge2 k � 1ð Þ� gðk � 1Þe2 k � 1ð Þ þ gðk � 1Þf2ðk � 1Þ
� � gðk � 1Þ 1� gðk � 1Þ 1þ qðk � 1Þ½ �f ge2 k � 1ð Þþ gðk � 1Þf2ðk � 1Þ
Using the case e2 k � 1ð Þ� f2
1�g of dead zone (14), then
gðk � 1Þ ¼ g0
1þqðk�1Þ[ 0 :
Fig. 6 Growth of neurons for 500 iterations for Example 2
Fig. 7 Testing result of for Example 2
Evolving Systems (2010) 1:173–180 179
123
Author's personal copy

DL1ðk� 1Þ� � gðk� 1Þ 1� g0
1þ qðk� 1Þ 1þ qðk� 1Þ½ ��
e2 k� 1ð Þþ gðk� 1Þf2ðk� 1ÞDL1ðk� 1Þ� � gðk� 1Þ 1� g0ð Þe2 k� 1ð Þ
þ gðk� 1Þf2ðk� 1Þ
With f2 k� 1ð Þ�f2
:
DL1ðk � 1Þ� � gðk � 1Þ 1� g0ð Þe2 k � 1ð Þ � f2
h i
ð22Þ
From the dead-zone, e2 k � 1ð Þ� f2
1�g0and g(k - 1) [ 0,
DL1(k - 1) B 0. L1(k) is bounded. If e2 k � 1ð Þ\ f2
1�g0;
from (14) we know g(k - 1) = 0, all of weights are not
changed, they are bounded, so L1(k) is bounded.
When e2 k � 1ð Þ� f2
1�g0; summarize (22) from 2 to T:
XT
k¼2
gðk � 1Þ 1� g0ð Þe2 k � 1ð Þ � f2
h i
� L1ð1Þ � L1ðTÞ
ð23Þ
Since L1(T) is bounded and using gðk � 1Þ ¼ g0
1þqðk�1Þ [ 0 :
limT!1
XT
k¼2
g0
1þ qðk � 1Þ
� �
1� g0ð Þe2 k � 1ð Þ � f2
h i
\1
ð24Þ
Because
e2 k � 1ð Þ� f2
1�g ;g0
1þqðk�1Þ
�
1� g0ð Þe2 k � 1ð Þ � f2
h i
� 0;
so:
limk!1
g0
1þ qðk � 1Þ
� �
1� g0ð Þe2 k � 1ð Þ � f2
h i
¼ 0 ð25Þ
Because L1(k - 1) is bounded, so q(k - 1) \?, and asg0
1þqðk�1Þ [ 0 :
limk!1
1� g0ð Þe2 k � 1ð Þ ¼ f2 ð26Þ
That is (15). When e2 k � 1ð Þ\ f2
1�g0½ � ; it is already in this
zone.
References
Angelov PP, Filev DP (2004a) A approach to online identification of
Takagi-Sugeno fuzzy models. IEEE Trans Syst Man Cybern
32(1):484–498
Angelov PP, Filev DP (2004b) Flexible models with evolving
structure. Int J Intell Syst 19(4):327–340
Angelov PP, Filev DP (2005) Simpl_eTS: a simplified method for
learning evolving Takagi-Sugeno fuzzy models. In: The inter-
national conference on fuzzy systems, pp 1068–1072
Angelov P, Zhou X (2006) Evolving fuzzy systems from data streams
in real-time. In: International symposium on evolving fuzzy
systems, pp 29–35
Angelov P, Ramezany R, Zhou X (2008) Autonomous novelty
detection and object tracking in video streams using evolving
clustering and Takagi-Sugeno type neuro-fuzzy system. In: IEEE
World Congress on computational intelligence, pp 1457–1464
Angelov P, Filev D, Kasabov N (2010) Editorial. Evol Syst 1:1–2
Chiu SL (1994) Fuzzy Model Identification based on cluster
estimation. J Intell Fuzzy Syst 2(3):267–278
Hassibi D, Stork DG (1993) Second order derivatives for network
pruning. In: Advances in neural information processing, vol 5.
Morgan Kaufmann, Los Altos, pp 164–171
Hilera JR, Martines VJ (1995) Redes Neuronales Artificiales,
Fundamentos, Modelos y Aplicaciones. Adison Wesley Ibero-
americana, USA
Iglesias JA, Angelov P, Ledezma A, Sanchis A (2010) Evolving
classification of agents’ behaviors: a general approach. Evol
Syst 3
Jang JSR, Sun CT (1997) Neuro-fuzzy and soft computing. Prentice
Hall, Englewood Cliffs
Juang CF, Lin CT (1998) An on-line self constructing nural fuzzy
inference network and its applications. IEEE Trans Fuzzy Syst
6(1):12–32
Juang CF, Lin CT (1999) A recurrent self-organizing fuzzy inference
network. IEEE Trans Neural Netw 10(4):828–845
Kasabov N (2001) Evolving fuzzy nural networks for supervised/
unsupervised online knowledge-based learning. IEEE Trans Syst
Man Cybern 31(6):902–918
Leng G, McGinnity TM, Prasad G (2005) An approach for online
extraction of fuzzy rules using a self-organising fuzzy neural
network. Fuzzy Sets Syst 150:211–243
Lin CT (1994) Neural fuzzy control systems with structure and
parameter learning. World Scientific, New York
Lughofer E, Angelov P (2009) Detecting and reacting on drifts and
shifts in on-line data streams with evolving fuzzy systems. In:
International Fuzzy Systems Association World Congress,
pp 931–937
Mitra S, Hayashi Y (2000) Neuro-fuzzy rule generation: survey in
soft computing framework. IEEE Trans Neural Netw 11(3):
748–769
Rivals I, Personnaz L (2003) Neural network construction and
selection in non linear modelling. IEEE Trans Neural Netw
14(4):804–820
Rong HJ, Sundararajan N, Huang GB, Saratchandran P (2006)
Sequential adaptive fuzzy inference system (SAFIS) for nonlin-
ear system identification and prediction. Fuzzy Sets Syst 157(9):
1260–1275
Soleimani H, Lucas C, Araabi BN (2010) Recursive Gath–Geva
clustering as a basis for evolving neuro-fuzzy modeling. Evol
Syst 1:59–71
Tzafestas SG, Zikidis KC (2001) On-line neuro-fuzzy ART-based
structure and parameter learning TSK model. IEEE Trans Syst
Man Cybern 31(5):797–803
Wang LX (1997) A course in fuzzy systems and control. Prentice
Hall, Englewood Cliffs
180 Evolving Systems (2010) 1:173–180
123
Author's personal copy