
Artigo IJGIS
22
PLEASE SCROLL DOWN FOR ARTICLE This article was downloaded by: [Inst Nac De Pesquisas Espacia] On: 4 August 2009 Access details: Access Details: [subscription number 913173452] Publisher Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK International Journal of Geographical Information Science Publication details, including instructions for authors and subscription information: http://www.informaworld.com/smpp/title~content=t713599799 Using neural networks and cellular automata for modelling intra-urban land-use dynamics C. M. Almeida a ; J. M. Gleriani b ; E. F. Castejon c ; B. S. Soares-Filho d a National Institute for Space Research (INPE), Remote Sensing Division—DSR, São José dos Campos, SP, Brazil b Federal University of Viçosa (UFV), Department of Forest Engineering—DEF, Campus Universitário, s/n-36571-000, Viçosa, MG, Brazil c National Institute for Space Research (INPE), Images Processing Division-DPI, São José dos Campos, Brazil d Federal University of Minas Gerais (UFMG), Centre for Remote Sensing—CSR/IGC, Belo Horizonte, MG, Brazil Online Publication Date: 01 January 2008 To cite this Article Almeida, C. M., Gleriani, J. M., Castejon, E. F. and Soares-Filho, B. S.(2008)'Using neural networks and cellular automata for modelling intra-urban land-use dynamics',International Journal of Geographical Information Science,22:9,943 — 963 To link to this Article: DOI: 10.1080/13658810701731168 URL: http://dx.doi.org/10.1080/13658810701731168 Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf This article may be used for research, teaching and private study purposes. Any substantial or systematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply or distribution in any form to anyone is expressly forbidden. The publisher does not give any warranty express or implied or make any representation that the contents will be complete or accurate or up to date. The accuracy of any instructions, formulae and drug doses should be independently verified with primary sources. The publisher shall not be liable for any loss, actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directly or indirectly in connection with or arising out of the use of this material.
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Artigo IJGIS
PLEASE SCROLL DOWN FOR ARTICLE
This article was downloaded by: [Inst Nac De Pesquisas Espacia]On: 4 August 2009Access details: Access Details: [subscription number 913173452]Publisher Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal of Geographical Information SciencePublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t713599799
Using neural networks and cellular automata for modelling intra-urban land-usedynamicsC. M. Almeida a; J. M. Gleriani b; E. F. Castejon c; B. S. Soares-Filho d
a National Institute for Space Research (INPE), Remote Sensing Division—DSR, São José dos Campos, SP,Brazil b Federal University of Viçosa (UFV), Department of Forest Engineering—DEF, Campus Universitário,s/n-36571-000, Viçosa, MG, Brazil c National Institute for Space Research (INPE), Images ProcessingDivision-DPI, São José dos Campos, Brazil d Federal University of Minas Gerais (UFMG), Centre for RemoteSensing—CSR/IGC, Belo Horizonte, MG, Brazil
Online Publication Date: 01 January 2008
To cite this Article Almeida, C. M., Gleriani, J. M., Castejon, E. F. and Soares-Filho, B. S.(2008)'Using neural networks and cellularautomata for modelling intra-urban land-use dynamics',International Journal of Geographical Information Science,22:9,943 — 963
To link to this Article: DOI: 10.1080/13658810701731168
URL: http://dx.doi.org/10.1080/13658810701731168
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article may be used for research, teaching and private study purposes. Any substantial orsystematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply ordistribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae and drug dosesshould be independently verified with primary sources. The publisher shall not be liable for any loss,actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directlyor indirectly in connection with or arising out of the use of this material.

Research Article
Using neural networks and cellular automata for modelling intra-urbanland-use dynamics
C. M. ALMEIDA*{, J. M. GLERIANI{, E. F. CASTEJON§ and B. S. SOARES-
FILHO"
{National Institute for Space Research (INPE), Remote Sensing Division—DSR,
Avenida dos Astronautas, 1758-12227-010, Sao Jose dos Campos, SP, Brazil
{Federal University of Vicosa (UFV), Department of Forest Engineering—DEF,
Campus Universitario, s/n-36571-000, Vicosa, MG, Brazil
§National Institute for Space Research (INPE), Images Processing Division-DPI, PO
Box 515, Sao Jose dos Campos, Brazil
"Federal University of Minas Gerais (UFMG), Centre for Remote Sensing—CSR/IGC,
Avenida Antonio Carlos, 6627-31270-900, Belo Horizonte, MG, Brazil
(Received 1 June 2005; in final form 13 July 2007 )
Empirical models designed to simulate and predict urban land-use change in real
situations are generally based on the utilization of statistical techniques to
compute the land-use change probabilities. In contrast to these methods, artificial
neural networks arise as an alternative to assess such probabilities by means of
non-parametric approaches. This work introduces a simulation experiment on
intra-urban land-use change in which a supervised back-propagation neural
network has been employed in the parameterization of several biophysical and
infrastructure variables considered in the simulation model. The spatial land-use
transition probabilities estimated thereof feed a cellular automaton (CA)
simulation model, based on stochastic transition rules. The model has been
tested in a medium-sized town in the Midwest of Sao Paulo State, Piracicaba. A
series of simulation outputs for the case study town in the period 1985–1999 were
generated, and statistical validation tests were then conducted for the best results,
based on fuzzy similarity measures.
Keywords: Neural networks; Cellular automata; Urban modelling; Land-use
dynamics; Fuzzy similarity measures; Town planning
1. Introduction
Cellular automata (CA) models consist of a simulation environment represented by
a gridded space (raster), in which a set of transition rules determine the attribute of
each given cell taking into account the attributes of cells in its vicinities. These
models have been very successful in view of their operationality, simplicity, andability to embody logics—as well as mathematics-based transition rules in both
theoretical and practical examples. Even in the simplest CA, complex global
patterns can emerge directly from the application of local rules, and it is precisely
this property of emergent complexity that makes CA so fascinating and their use so
appealing.
*Corresponding author. Email: [email protected]
International Journal of Geographical Information Science
Vol. 22, No. 9, September 2008, 943–963
International Journal of Geographical Information ScienceISSN 1365-8816 print/ISSN 1362-3087 online # 2008 Taylor & Francis
http://www.tandf.co.uk/journalsDOI: 10.1080/13658810701731168
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

The first CA models applied to urban studies were usually based on very simple
methodological procedures, such as the use of neighbourhood coherence constraints
(Phipps 1989) or Boolean rules (Couclelis 1985) for the transition functions. Later
on, successive refinements started to be incorporated into these models, like the
adoption of dynamic transition rules (Deadman et al. 1993), which could change as
conditions and policies within the township under study changed. Other examples in
this direction are the work of Wu (1996), who conceived transition rules to capture
uncoordinated land development process based on heuristics and fuzzy sets theory,
and the work of Ward et al. (1999), in which transition rules are modified in
accordance with the outcomes of the optimization of economic, social, and
environmental target thresholds associated with sustainable urban development.
CA transition functions have also been enhanced by the incorporation of
decision-support tools, including AHP, i.e. analytical hierarchy process-based
techniques, which have been strongly enabled by the linkages between CA and GIS
(Engelen et al. 1997). Besides supporting CA internal operations (Clarke and
Gaydos 1998, Li and Yeh 2000), GIS have also been useful in implementing cellular
automata devices based on proximal models of space (Takeyama and Couclelis
1997) and in articulating spatial analysis factors of micro and macro scales (Phipps
and Langlois 1997).
Leading theoretical progresses in the broader discipline of artificial intelligence
(AI), such as expert systems, evolutionary computation and artificial neural
networks have recently been included in the domain of CA simulations. Artificial
neural networks (ANN) attempt to simulate human reasoning (Moore 2000)
offering fault-tolerant solutions. According to Fischer and Abrahart (2000), these
mechanisms are able to learn from and make decisions based on incomplete, noisy,
and fuzzy information.
Works associating ANN with CA models for urban analysis are still quite limited
in number. Li and Yeh (2001) conducted a simulation of land-use change for a city
in southern China and its immediate surroundings, using ANN embedded in a CA
model upon a dual-state approach (urban/non-urban). They further refined this
model dealing with multiple regional land uses (Li and Yeh 2002) and simulations
for alternative development scenarios (Yeh and Li 2003). Pijanowski et al. (2002a, b)
carried out forecasts of urban growth for two different regions at the margins of
Lake Michigan using neural nets to assess the importance of the land-use change
drivers in a so-called ‘Land Transformation Model (LTM)’, which presents the four
paradigms of cellular automata according to Batty et al. (1997): (i) space constituted
by an array of cells, (ii) discretization of cells states and time, (iii) local influence
neighbourhoods, and (iv) universally applied transition rules.
All such investigations did not scale down at the intra-urban level, inasmuch as
their scope concentrated on regional (macro scale) issues. More recently, similar
studies also dealt with ANN-based CA simulation models for metropolitan areas:
Detroit and the Twin Cities in Minnesota in the US (Pijanowski et al. 2005) and
Beijing in China (Guan and Wang 2005), always focusing their attention on the
urban sprawl phenomenon, and hence, generically categorizing the model states in a
binary way (urban/non-urban).
In contrast to these generalized approaches, the purpose of this paper is to deal
with the simulation of multiple intra-urban land uses (e.g. residential, commercial,
industrial, etc.) by means of an ANN-calibrated CA model. Scaling down at the
intra-urban level enables researchers and town planners to better understand the city
944 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

structure and its functioning, which hence may support more sound planning
policies and actions, based on a more solid knowledge of its inner land-use
dynamics.
One of the first proposals towards the use of ANN for urban simulations arose
already in the second half of last decade, when Clarke et al. (1997), in view of the
widely acknowledged and challenging complex nature of urban systems subject to
rapid growth, stated that neural network methods could be highly suitable for
modelling them. Researchers in this field have come to an agreement in recent years
in the sense that such non-parametric approaches could better cope with the
nonlinearities and chaotic behaviour of fast-changing urban environments (Li and
Yeh 2002, Yeh and Li 2003, Guan and Wang 2005), given the ANN ability to handle
the uncertainties, incompleteness, overdimensionality, and multimodal behaviour of
spatial data (Openshaw 1998, Fischer and Abrahart 2000).
2. Artificial neural networks
ANN can be simply defined as a massively parallel distributed computational device
consisting of processing units, also called neurons or nodes, which are organized in a
couple of layers. The neurons are entrusted with the storage of knowledge acquired
within the system, which is then rendered available for further use (Haykin 1999). A
neural network usually presents one input layer, one output layer, and one or more
hidden layers (or eventually none) in between. These successive layers of processing
units present connections running from every unit (neuron) in one layer to every unit
in the next layer. The connections are responsible for passing information
throughout the network, and they are characterized by weights, which are initially
set in a random way and can be positive or negative (Bishop 1995). All the neurons,
except those belonging to the input layer, perform two simple processing
functions—receiving the signal (activation) of the neurons in the previous layer
and transmitting a new signal as the input to the next layer.
Training a feed-forward neural network with supervised learning consists in
propagating forward an input signal (or pattern) in the net until activation reaches
the output layer. This constitutes the so-called forward propagation phase. The
output of the output layer is then compared with the teaching input. The error, i.e.
the difference (delta) dj between the output oj and the teaching input tj of a target
output unit j is then used together with the output oi of the source unit i to compute
the necessary changes in link wij. To compute the deltas of inner units for which no
teaching input is available, i.e. the units of hidden layers, the deltas of the following
layer (which are already computed) are retrieved. In this way, the errors (deltas) are
propagated backwards, and this exact phase is called backward propagation
(Rumelhart et al. 1986).
The training algorithm used in this work experiment was the ‘resilient back-
propagation’, which is a local adaptive learning scheme, performing supervised
batch learning in multi-layer neural networks. Basically, the backtracking step of the
conventional back-propagation is no longer executed, if a jump over a minimum
occurred. A weight-decay term (a) is also introduced in order to reduce the output
error and the size of the weights as well, which is essentially meant to improve
generalization. The composite error function is as follows:
E~X
ti{oið Þ2z10{aX
wij2 ð1Þ
Modelling intra-urban land-use dynamics 945
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

where ti is the teaching input of unit i; oi is the real output of unit i; a is the weight
decay term; j is an index of a successor to the current unit i with link wij from i to j.
The basic principle of the resilient back-propagation is to eliminate the harmful
influence of the size of the partial derivative on the weight step. In this way, only the
sign of the derivative is considered to indicate the direction of the weight update
(Riedmiller and Braun 1993). The size of the weight change is solely determined by a
specific ‘update-value’ D(t)ij:
Dwtð Þ
ij ~
{Dtð Þ
ij , if LE tð Þ
Lwijw0
zDtð Þ
ij , if LE tð Þ
Lwijv0
0, else
8>><
>>:ð2Þ
where LE/Lwij(t) refers to the summed gradient information over all patterns of the
pattern set (‘batch learning’). The second step of the resilient back-propagation
learning is to determine the new update-values D(t)ij. This is based on a sign-
dependent adaptation process according to the equation below:
Dtð Þ
ij ~
gz � D t{1ð Þij , if LE t{1ð Þ
Lwij� LE tð Þ
Lwijw0
g{ � D t{1ð Þij , if LE t{1ð Þ
Lwij� LE tð Þ
Lwijv0
Dt{1ð Þ
ij , else
8>>>><
>>>>:
where 0vg{v1vgz
ð3Þ
where g is the learning rate, which specifies the step width of the gradient descent.
The resilient back-propagation is aimed at adapting its learning process to the
topology of the error function, and hence, it follows the principle of ‘batch learning’.
This implies that weight-update and adaptation are performed after the gradient
information of the whole pattern set is computed (Riedmiller and Braun 1993).
One of the greatest advantages of ANN is their ability to generalize. This implies
that a trained net could classify data from the same class as the learning data that
have never been presented to it before. In real-world applications, only a small part
of all possible patterns for the generation of a neural net is at hand. In order to
achieve the best generalization, the data set should be split into three parts (Haykin
1999, Fischer and Abrahart 2000):
N the training set is used to train a neural net, and its error is minimized during
training;
N the validation set is used to determine the performance of a neural network on
patterns that are not trained during learning;
N the test set is meant for checking the overall performance of a neural net.
The learning should be stopped when the validation set error reaches its
minimum. At this very point, the net is able to attain the best generalization. If
learning is not stopped, overtraining occurs, and the performance of the net for the
entire data set will decrease, even though the error on the training data still becomes
smaller. After concluding the learning phase, the net should be finally checked with
the third data set—the test set.
The neural net learning process is decisive for the success of the intra-urban land-
use simulation model. In some cases, depending on the study area characteristics,
946 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009
like the observable land-use spatial configuration patterns and the respective driving
forces impelling land-use dynamics, the net outcomes can become highly sensitive inface of its architecture, learning algorithm, and internal parameters. These ANN
outputs concern the land-use change suitability maps, which will inform the CA
model of the exact cells that are most likely to undergo changes regarding their land-
use status. Although output values from a neural net cannot be directly interpreted
as probabilities in the strict sense, their logic resembles a transition probabilities
ranking in the particular case of this experiment, and they will be referred to as land-
use change probabilities hereafter.
3. ANN-based CA model for the simulation of intra-urban land-use change
As previously stated, ANN offer a great number of advantages for modelling
complex systems, of which urban areas are a major example. Their ability to be
robust and noise-resistant regardless of redundant, missing, or fuzzy data, to handle
nonlinear problems, to be unconstrained by the straitjacket of mathematical
formulations, and to adapt to non-normal frequency distributions (Openshaw 1998)
make their use suitable for unravelling the intricacies of the relationships between
site attributes and urban dynamics of growth and change.
The simulation model adopted in this experiment has been calibrated by neural
networks, i.e. maps of land-use change probability were generated in the Stuttgart
Neural Network Simulator (SNNS) software, where the teaching inputs were the
maps of land-use change, and the respective variables corresponded to maps relatingto the various types of site attractiveness, characterized by biophysical and
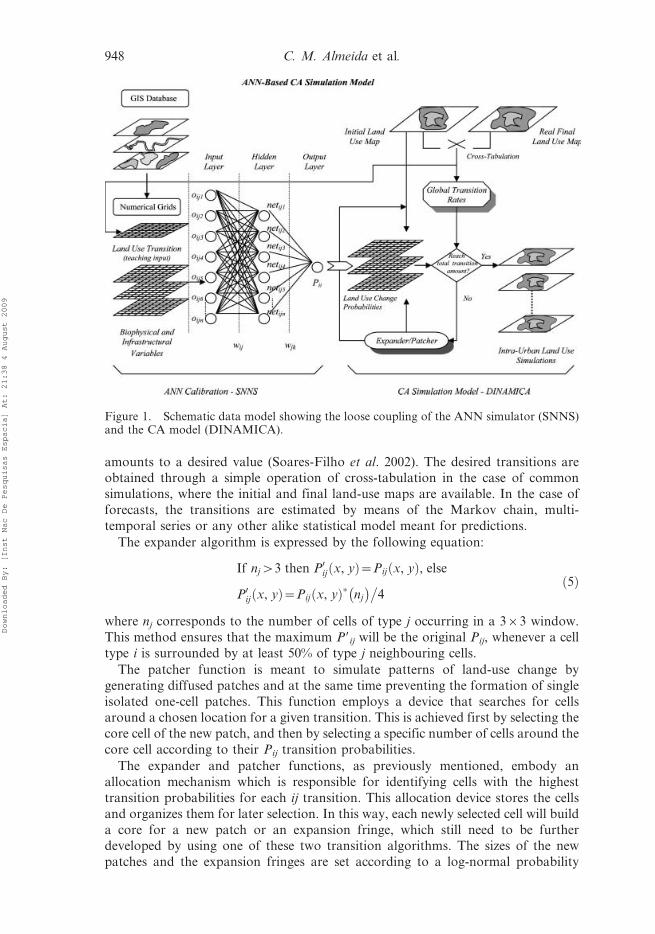
infrastructure variables. These probability maps drove an open framework CA
simulation model—DINAMICA (figure 1)—developed by the Centre for Remote
Sensing of the Federal University of Minas Gerais—CSR/UFMG.
DINAMICA is based on eight cell Moore neighbourhoods implemented by
means of two empirical land-use allocation algorithms (or transition functions):
‘expander’ and ‘patcher’. The expander function accounts for the expansion of
previous patches of a certain land-use class. The patcher function, on its turn, is
designed to generate new patches through a seedling mechanism. In summary, the
expander function performs transitions from a state i to a state j only in the adjacent
vicinities of cells with state j. And the patcher function performs transitions from astate i to a state j only in the adjacent vicinities of cells with state other than j.
These two processes can be merged into the following equation:
Qij~r� expander functionð Þzs� patcher functionð Þ ð4Þ
where Qij corresponds to the total amount of transitions of type ij, and r and s are
respectively the percentage of transitions performed by each function, with r + s51.
According to Soares-Filho et al. (2002), both transition algorithms use a
stochastic selecting mechanism. The applied algorithm consists in scanning the
initial land-use map to sort out the cells with the highest probabilities and then
arrange them in a data array. Following this procedure, cells are selected randomly
from top to bottom of the data array (the internal stochastic choosing mechanismcan be loosened or tightened depending on the degree of randomization desired). In
a final step, the land-use map is again scanned to perform the selected transitions.
In this case, the expander function does not perform the amount of estimated
changes after a fixed number of iterations; it transfers to the patcher function a
residual number of transitions, so that the total number of transitions always
Modelling intra-urban land-use dynamics 947
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009
amounts to a desired value (Soares-Filho et al. 2002). The desired transitions are
obtained through a simple operation of cross-tabulation in the case of common
simulations, where the initial and final land-use maps are available. In the case of
forecasts, the transitions are estimated by means of the Markov chain, multi-
temporal series or any other alike statistical model meant for predictions.
The expander algorithm is expressed by the following equation:
If njw3 then P0ij x, yð Þ~Pij x, yð Þ, else
P0ij x, yð Þ~Pij x, yð Þ� nj
� ��4
ð5Þ
where nj corresponds to the number of cells of type j occurring in a 363 window.
This method ensures that the maximum P9ij will be the original Pij, whenever a cell
type i is surrounded by at least 50% of type j neighbouring cells.
The patcher function is meant to simulate patterns of land-use change by
generating diffused patches and at the same time preventing the formation of single
isolated one-cell patches. This function employs a device that searches for cells
around a chosen location for a given transition. This is achieved first by selecting the
core cell of the new patch, and then by selecting a specific number of cells around the
core cell according to their Pij transition probabilities.
The expander and patcher functions, as previously mentioned, embody an
allocation mechanism which is responsible for identifying cells with the highest
transition probabilities for each ij transition. This allocation device stores the cells
and organizes them for later selection. In this way, each newly selected cell will build
a core for a new patch or an expansion fringe, which still need to be further
developed by using one of these two transition algorithms. The sizes of the new
patches and the expansion fringes are set according to a log-normal probability
Figure 1. Schematic data model showing the loose coupling of the ANN simulator (SNNS)and the CA model (DINAMICA).
948 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

distribution, whose parameters are determined as a function of the mean size and
variance of each type of patch and expansion fringe to be generated (Soares-Filho
et al. 2002).
4. Applications
4.1 Study area and the GIS database
The ANN-based CA simulation model was applied to a medium-sized city,
Piracicaba, located in the Midwest of Sao Paulo State, at the margins of the
Piracicaba River, south-east of Brazil. The city comprised a total of 198 407
inhabitants in the initial time of simulation (1985), which rose to 309 531 inhabitants
in 1999. In this period, the annual population growth rate was around 1.56%, and
the resulting impact in the urban area was marked by the massive expansion of
existing residential areas together with a mushrooming of peripheral residential
settlements, which have been mostly incorporated into the main urban agglomera-
tion. Besides experiencing a rapid development concerning the residential use,
Piracicaba also witnessed intra-urban land-use changes like the increase in
industrial, institutional, and leisure areas (figure 2).
The city land-use maps in 1985 and 1999 were obtained from the Piracicaba
Municipal Secretariat for Town Planning. They were scanned, converted to vector
format in AutoCad, and then later pre-processed using SPRING GIS (developed by
the Images Processing Division of the Brazilian National Institute for Space
Research—DPI-INPE). These official maps do not always correspond to the real
situation, since they do not indicate informal (not legalized) settlements on the one
hand, and on the other hand, they show some of the legally approved settlements
that have not been built. To cope with these eventual disparities, satellite imagery
has been used to update the land-use maps exclusively regarding residential
settlements. Two Landsat images (WRS 220/76) were employed for this end: a TM-5
scene of 10 August 1985, and a second scene of 16 July 1999. The latest image was
georeferenced by means of an official topographic chart (UTM—SAD-69) with a
scale of 1:50 000, and the total average error was 1.2 pixels (with the tolerance
threshold lying around 1.5–2.0 pixels). It was then used for co-registering the 1985
image, and the total error amounted to only 0.3 pixel. The geographic coordinates of
the control points were later used for the registration of the city maps in vector
format using SPRING. Such maps were finally superimposed on linearly enhanced
colour composites of the registered images (4R_7G_1B), allowing a visual
crosscheck of existent and non-existent settlements.
For the purpose of simplifying the land-use maps, they were subject to
generalization procedures. Similar zones were reclassified to only one category,
e.g. residential zones of different densities were all reclassified to simply residential,
and special use and social infrastructure zones were reclassified to institutional.
Eight land-use zone categories were defined: residential, commercial, industrial,
services, institutional, leisure/recreation, water bodies, and non-urban use. Districts
located farther than 10 km from the main urban agglomeration were excluded from
the analysis, and the traffic network and minor non-occupied areas were disregarded
in the simulations.
All data used in this application were resampled to 50 m650 m for a better visual
adequacy of the maps (coarser resolutions would otherwise result in unpleasant
jags), but also with the aim of keeping a number of cells that would enable faster
Modelling intra-urban land-use dynamics 949
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

simulations. The adopted resolution formed a grid containing 334 lines and 360
columns, with a total of 120 240 cells (30 060 ha) defining the region for simulation.
4.2 Exploratory analysis
One of the first steps in the exploratory analysis is the identification of the existing
types of intra-urban land-use change. A simple cross-tabulation (figure 3) between
the initial and final land-use maps provides this information (table 1), besides
quantifying the amount of change in terms of percentage, also called global
transition rates (table 2). These rates express the likelihood of change in the study
area as a whole, regardless of the influence of the driving (biophysical and
Figure 3. Land use change in Piracicaba from 1985 to 1999.
Figure 2. Generalized land-use maps in Piracicaba in 1985 (left) and 1999 (right).
950 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

infrastructure) variables. In some cases, they can be referred to as ‘global transition
probabilities’.
After identifying the existent land-use transitions, the next step concerns the
determination of the different sets of variables governing each of the four types of
change. The variables available for the modelling analysis do not always represent
the set of necessary variables able to produce ideal simulation results. In fact, intra-
urban land-use dynamics is subject to sudden and unforeseeable forces, like
landlords’ decisions to develop certain areas in disregard of others. In other words,
land-use transitions are more likely to be determined by some factors than others
depending on the processes of acquisition and development undertaken by
developers and consumers of land (Almeida et al. 2003). But in a general way,
there is indeed a set of decisive factors for urban land-use transitions, in the sense
that they substantially respond for the main drivers of such changes. And these
precise factors have effectively guided the modelling experiment at issue.
The several maps of biophysical and infrastructure variables have been generated
on the basis of the information extracted from land-use maps, like distances to
certain uses, distances to the Piracicaba River as well as distances to different
categories of the traffic network, such as paved and non-paved urban or interurban
roads. In all cases, the Euclidean distance has been used, and methods to initially
sort out the ideal set of variables to explain a given type of land-use change were
based on heuristic procedures. These procedures basically regard the visualization of
distinct maps of variables (distances in grey scale) superposed on maps of land-use
transition, so as to identify those that are more meaningful to explain the different
types of land-use change. A map of land-use transition was made for each respective
type of land-use change (NU_RES; NU_IND; NU_INST; NU_LEIS) through
reclassification of the cross-tabulation map. These maps of transition indicate with
different colours the areas of change and no change, and a black colour is assigned
to areas not associated with the land-use change under consideration, i.e. all areas
Table 1. Existent land-use transitions.
Notation Land-use transition
NU_RES Non-urban to residentialNU_IND Non-urban to industrialNU_INST Non-urban to institutionalNU_LEIS Non-urban to leisure/recreation
Table 2. Global transition rates for Piracicaba, 1985–1999.
Landuse NonU Res Comm Indust Inst Serv
Waterbodies Leis/rec
NonU 0.8353 0.1501 0 0.0113 0.0028 0 0 0.0005Res 0 1 0 0 0 0 0 0Comm 0 0 1 0 0 0 0 0Indust 0 0 0 1 0 0 0 0Inst 0 0 0 0 1 0 0 0Serv 0 0 0 0 0 1 0 0Water 0 0 0 0 0 0 1 0Leis/Rec
0 0 0 0 0 0 0 1
Modelling intra-urban land-use dynamics 951
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

where the land-use at the initial time of simulation differs from the initial use of the
transition considered. All the overlays were carried out in spring, which enables
transparency in-between layers.
The natural environment (soil, vegetation, relief, conservation areas) has not been
regarded as a decisive driver for land-use change. In other words, natural
characteristics of the physical environment, excluding the Piracicaba River, have
not been considered as impedances to urban growth at a more generalized level. The
city sites are relatively flat, with mild slopes, and present no constraints regarding
soil, vegetation and conservation areas.
All variables selected to integrate the simulation model and their respective
notations are presented in table 3, and the sets of variables chosen to explain each of
the four transitions are indicated in table 4. The maps of variables in grid format
represent the input neurons, while the map of land-use transition consists in the net
teaching input, as previously mentioned.
4.3 Training
The DINAMICA model is driven by ‘n’ maps of transition probabilities which relate
to each of the ‘n’ existent types of land-use transition. Given this constraint, each
transition in this experiment was separately handled in the SNNS, and for each of
the four types of land-use change, there was a complete process of training,
validation, and testing of the respective neural net.
One of the key issues in this research was the design of the neural networks
architecture. Many authors have proposed mathematical formulations to meet this
end, but to date they have not yet come to an agreement as to the methods to
determine the optimal number of hidden layers or the ideal number of neurons in
the hidden layer. It is always desirable to work with reduced sizes of nets, in which
Table 3. Definition of the land-use change driving variables.
Notation Biophysical or infrastructure land use change variable
dist_riv Distances to riversdist_com Distances to commercial zonesdist_ind Distances to small-sized industrial zonesdist_inst Distances to institutional zonesdist_res Distances to residential zonesdist_leis Distances to leisure/recreation zonesint_rds Distances to main interurban roadsmain_rds Distances to main paved and non-paved urban and interurban roads
Table 4. Selection of variables determining land-use change.
Variables Nu_Res Nu_Ind Nu_Inst Nu_Leis
dist_riv Ndist_com Ndist_ind Ndist_inst Ndist_res N N Ndist_leis Nint_rds N Nmain_rds N
952 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

fast training and good performance can be ensured. For Kavzoglu and Mather
(1999), nets with more neurons or layers present the advantage to learn more
complex patterns, besides being less influenced by the initial random weights (Paola
and Schowengerdt 1997). But these complex neural nets, on the other hand, demand
more time for training and do not generalize well with unknown data, given the
excessive memorization of noise found in the training data sets (Haykin 1999).
According to Kolmogorov’s theorem, any continuous function W: XnRRc can be
implemented through a three-layer neural network with n neurons in the input layer,
(2n + 1) neurons in the single hidden layer, and c nodes in the output layer (Wang
1994). Fletcher and Goss (1993) suggested that the ideal number of neurons in the
hidden layer would be between 2n + 1 andffiffiffiffiffiffiffiffiffiffiffiffiffiffi2nzmp
, where n corresponds to the
number of neurons in the input layer, and m, to the number of neurons in the output
layer. Despite these divergences, there is a general consensus among researchers in
the field of urban CA modelling that empiricism is a reasonable way to determine
the best neural net structure for a specific problem (Li and Yeh 2001, Yeh and Li
2003, Guan and Wang 2005). All the four neural nets used in this experiment present
only one hidden layer with six neurons. The neurons in the input layer correspond to
the driving variables respectively available for each land-use change, and the output
layer presents just a single neuron, which refers to the local land-use transition
probabilities (table 5). The internal parameters of the nets were heuristically
determined.
The maps of land-use transition, used as teaching inputs, were converted into
grids, where 0.99 was assigned to the areas of change, 0.01, to the areas of no
change, and 0.000001 to the areas not concerned in the land-use change under
consideration. In the face of the sigmoid nature of the activation function, absolute
values of 0 and 1 were avoided in order to prevent excessively large values of weights
(Kavzoglu and Mather 2003) and, hence, biases in the numerical ranking of the
output nets. The grids generated in SPRING with extension SPR were converted
into ASCII format for their insertion in the neural network simulator (SNNS).
A special routine was created in C + + to randomly select 12 000 grid points,
which accounts for nearly 10% of the total amount of pixels in the study area, and to
further organize them in a array of 120 lines by 100 columns. Samples of this size
were used both as the training and validation sets, and the whole area was used as
the test set.
As already mentioned, the learning was interrupted when the validation set error
reached its minimum (figure 4). The SNNS displays three different types of error
Table 5. Parameters used in the neural nets.
Type oftransition
Trainingalgorithm
Inputneurons
Hiddenneurons
Numberof cycles
Initialupdate-value
(D0)
Maximumstep size(Dmax)
Weight-decay (a)
NU_RES ResilientBackProp
2 6 30 0.1 50 4
NU_IND ResilientBackProp
4 6 20 0.1 50 4
NU_INST ResilientBackProp
2 6 20 0.1 50 4
NU_LEIS ResilientBackProp
3 6 20 0.1 50 4
Modelling intra-urban land-use dynamics 953
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

according to the number of cycles: the overall sum-of-the-squares of the output
error (SSE); the overall mean square error (MSE), which refers to the average of the
square of the error, namely the average of the difference between the desired
response or teaching input (ti) and the actual system output (oi); and the SSE divided
by the number of output units (SSE/out), which, for the kth training pattern, is:
SSE=out~1
no: of outputs
Xtk{okð Þ2 ð6Þ
The output grids were converted in thematic maps so as to allow a visual
comparison between such maps of local transition probabilities (output neurons)
and the respective maps of land-use transition, which correspond to the teaching
inputs (figure 5). This comparison enables a final empirical evaluation of the neural
nets performance. It is worth remarking that the DINAMICA model automatically
sets to 0 (zero) the areas where the land use at the initial time of simulation differs
from the initial use of the transition considered, in the cases when the maps of
transition probabilities are generated within the DINAMICA environment through
statistical methods. Since the maps of transition probabilities were produced by the
SNNS, areas with high transition probabilities were somehow overestimated. But
this surplus is disregarded when the DINAMICA algorithms entrusted with the
cells’ land-use change scan the maps of transition, for they take into account the
actual cells use according to the initial land-use map, and hence, the areas that can
effectively undergo changes are considerably reduced.
5. Validation
For assessing the accuracy of the CA simulation model performance, fuzzy
similarity measures applied within a neighbourhood context were used. Several
validation methods operating on a pixel vicinity basis have been proposed (Costanza
1989, Pontius 2002, Hagen 2003), aimed at depicting the spatial patterns similarity
between a simulated and reference map, so as to relax the strictness of the pixel-by-
pixel agreement. The fuzzy similarity method employed in this work is a variation of
Figure 4. Error decay curve for the training set (dark grey) and validation set (light grey)regarding the ‘NU_INST’ neural net.
954 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009
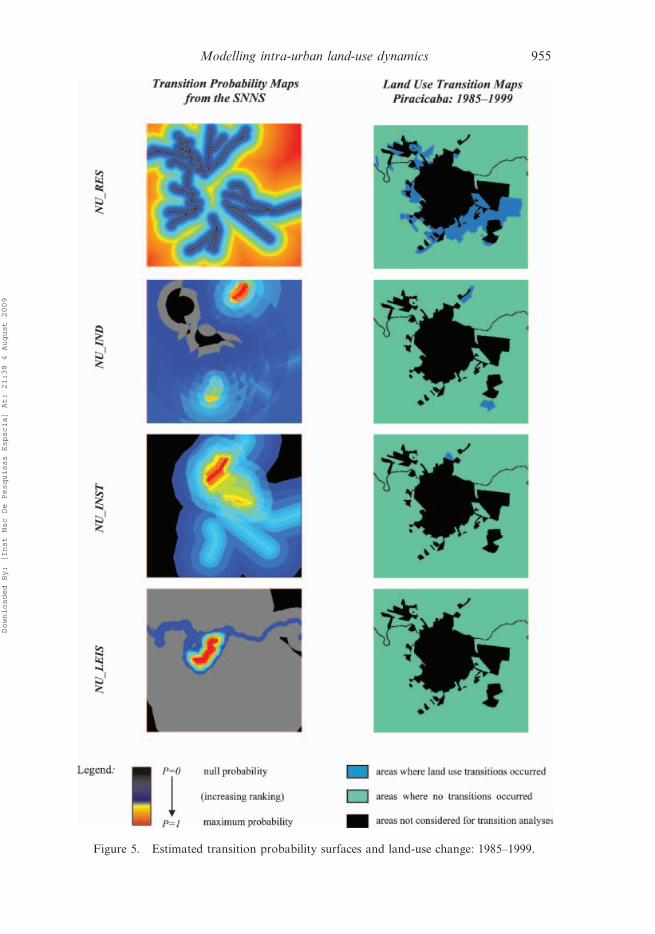
Figure 5. Estimated transition probability surfaces and land-use change: 1985–1999.
Modelling intra-urban land-use dynamics 955
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

the fuzzy similarity metrics developed by Hagen (2003), and has been implemented
in the DINAMICA model by the CSR team.
Hagen’s method is based on the concept of fuzziness of location, in which the
representation of a cell is influenced by the cell itself and, to a lesser extent, by the
cells in its neighbourhood. Not considering fuzziness of category, the fuzzy
neighbourhood vector can represent the fuzziness of location. In the fuzzy similarity
validation method, a crisp vector is associated with each cell in the map. This vector
has as many positions as map categories (land uses), assuming 1 for a category5i,
and 0 for categories other than i. Thus, the fuzzy neighbourhood vector (Vnbhood)
for each cell is given as:
Vnbhood~
mnbhood1
mnbhood2
..
.
mnbhoodC
266664
377775
ð7Þ
mnbhood~ mcrisp i, 1�m1, mcrisp i, 2�m2, . . . , mcrisp i, n�mn
�� �� ð8Þ
where mnbhood i represents the membership for category i within a neighbourhood of N
cells (usually N5n2); mcrisp ij is the membership of category i for neighbouring cell j,
assuming, as in a crisp vector, 1 for i and 0 for categories other than i (i,C); mj is the
distance-based membership of neighbouring cell j, where m accounts for a distance
decay function, for instance, an exponential decay (m522d/2). The selection of the
most appropriate decay function and the size of the window depend on the vagueness
of the data and the spatial error tolerance threshold (Hagen 2003). As the intention is
to assess the model spatial fit at different resolutions, besides the exponential decay, a
constant function equal to 1 inside the neighbourhood window and to 0 outside can
also be applied. Equation (11) sets the category membership for the central cell,
assuming that the highest contribution is found within a neighbourhood window n x
n. Next, a similarity measure for a pair of maps can be obtained through a cell-by-cell
fuzzy set intersection between their fuzzy and crisp vectors:
S(VA,VB)~½ mA,1
�� ,mB,1jMin, mA,2
�� ,mB,2jMin,:::::::::::, mA,i
�� ,mB,ijMin�Max ð9Þ
where VA and VB refer to the fuzzy neighbourhood vectors for maps A and B, and mA,i
and mB,i are their neighbourhood memberships for categories i,C in maps A and B, as
in equation (10). According to Hagen (2003), since the similarity measure S (VA, VB)
tends to overestimate the spatial fit, the two-way similarity is applied instead:
Stwoway(A,B)~ Sj (VnbhoodA,VcrispB),S(VcrispA,VnbhoodB)jMin ð10Þ
The overall similarity of a pair of maps can be calculated by averaging the two-
way similarity values for all map cells. However, when comparing a simulated map
to the reference map (real land use in the final time of simulation), this calculation
carries out an inertial similarity between them due to their areas that did not suffer
any change. To avoid this problem, the CSR team introduced a modification into
the overall two-way similarity method of DINAMICA, using two maps of
differences, which present value 1 for the cells that underwent change, and 0 for
those that did not change. In this way, each type of change is analysed separately
956 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

using pairwise comparisons involving maps of differences: (i) between the initial
land-use map and a simulated one and (ii) between the same initial land-use map
and the reference one. This modification is able to tackle two matters. First, as it
deals with only one type of change at a time, the overall two-way similarity measure
can be applied to the entire map, regardless of the different number of cells per
category. Second, the inherited similitude between the initial and simulated maps
can be eliminated from this comparison by simply ignoring the null cells from the
overall count. However, there are two ways of performing this function. One
consists of counting only two-way similarity values for non-null cells in the first map
of difference, and the other consists in doing the opposite. As a result, three
measures of overall similarity are obtained, with the third representing the average
of the two ways of counting. As random pattern maps tend to score higher due to
chance depending on the manner in which the nulls are counted, it is advisable to
pay close attention to the minimum overall similarity value. This method has proven
to be the most comprehensive when compared with the aforementioned methods, as
it yields fitness measures with the highest contrast for a series of synthetic patterns
that depart from a perfect fit to a totally random pattern (Soares-Filho et al. 2004).
6. Simulations and discussion
Based on the assignment of appropriate weights to the input variables, the SNNS-
generated maps of local transition probabilities drove the CA simulation model—
DINAMICA. This model is also guided by internal parameters, determined
empirically, and which concern the average size and variance of patches and the
relative proportion of the transition algorithms (table 6). Due to the randomness of
the DINAMICA transition algorithms, even though the same internal parameters
are kept in different runs, different simulation results will be produced after each run
of the model. In this way, the three best urban land-use simulation results for the
city of Piracicaba in the period 1985–1999 are presented in figure 6.
It is observed that the transition from non-urban to residential use (NU_RES)
largely depends on the previous existence of residential settlements in their
surroundings, because this implies the possibility of extending existing nearby
infrastructure. It also depends on the available accessibility to such areas. The
implementation of large institutional areas (NU_INST) occurs near peripheral
roads and previously existent institutional areas, since they grow as extensions of
already established institutional zones. Likewise this transition, the expansion of
industrial districts (NU_IND) also requires the proximity to previously existent
industrial zones and the availability of road access. This can be explained by the fact
that in the industrial production process, the output of certain industries represents
Table 6. DINAMICA internal parameters for the simulation of urban land-use change inPiracicaba: 1985–1999.
Type oftransition
Average size ofpatches (ha)
Variance ofpatch size
(ha)Proportion of
‘expander’Proportion of
‘patcher’Number ofiterations
NU_RES 300 30 0.85 0.15 10NU_IND 150 1 0.45 0.55 10NU_INST 75 1 1.0 0 10NU_LEIS 20 0 1.0 0 10
Modelling intra-urban land-use dynamics 957
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

the input of other ones, which raises the need of rationalization and optimization of
costs by the clustering of plants interrelated in the same production chain. This
transition supposes as well the nearness to the labour-force supply centres
(peripheral residential areas) and also a location not too far from commercial
zones, since industrial activities depend on the supply of commercial goods. New
leisure and recreation zones (NU_LEIS) also take place adjacent to already existent
zones of this type, since they are commonly created as extensions of the latter ones.
These areas are created along low and flat riverbanks, since they are floodable and
hence unsuitable for sheltering other urban uses. They are also strategically located
in relation to their catchment area, i.e. near central residential areas, which are those
sheltering higher population densities and which in fact correspond to the demand
market for leisure and recreation. It is implied by the above analyses that the land-
use transitions show compliance with economic theories of urban growth and
change, where there is a continuous search for the optimal location, able to ensure
Figure 6. Three best simulations compared with actual land use in 1999. The centralcommercial zone (orange) and the services corridors (dark yellow) did not undergo anytransitions during the observed time period. The new residential (dark blue) and institutionalareas (light yellow) as well as the leisure and recreational zones (red) were well modelled,particularly in the first and second simulations.
958 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009
competitive real estate prices, good accessibility, rationalization of transportation
costs, and a strategic location in relation to supply and demand markets.
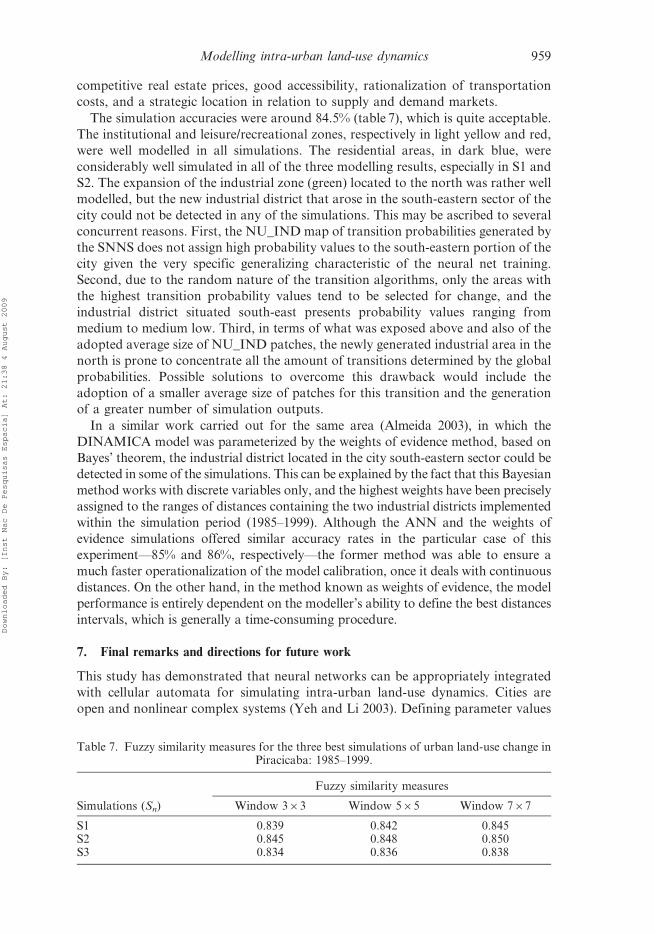
The simulation accuracies were around 84.5% (table 7), which is quite acceptable.
The institutional and leisure/recreational zones, respectively in light yellow and red,
were well modelled in all simulations. The residential areas, in dark blue, were
considerably well simulated in all of the three modelling results, especially in S1 and
S2. The expansion of the industrial zone (green) located to the north was rather well
modelled, but the new industrial district that arose in the south-eastern sector of the
city could not be detected in any of the simulations. This may be ascribed to several
concurrent reasons. First, the NU_IND map of transition probabilities generated by
the SNNS does not assign high probability values to the south-eastern portion of the
city given the very specific generalizing characteristic of the neural net training.
Second, due to the random nature of the transition algorithms, only the areas with
the highest transition probability values tend to be selected for change, and the
industrial district situated south-east presents probability values ranging from
medium to medium low. Third, in terms of what was exposed above and also of the
adopted average size of NU_IND patches, the newly generated industrial area in the
north is prone to concentrate all the amount of transitions determined by the global
probabilities. Possible solutions to overcome this drawback would include the
adoption of a smaller average size of patches for this transition and the generation
of a greater number of simulation outputs.
In a similar work carried out for the same area (Almeida 2003), in which the
DINAMICA model was parameterized by the weights of evidence method, based on
Bayes’ theorem, the industrial district located in the city south-eastern sector could be
detected in some of the simulations. This can be explained by the fact that this Bayesian
method works with discrete variables only, and the highest weights have been precisely
assigned to the ranges of distances containing the two industrial districts implemented
within the simulation period (1985–1999). Although the ANN and the weights of
evidence simulations offered similar accuracy rates in the particular case of this
experiment—85% and 86%, respectively—the former method was able to ensure a
much faster operationalization of the model calibration, once it deals with continuous
distances. On the other hand, in the method known as weights of evidence, the model
performance is entirely dependent on the modeller’s ability to define the best distances
intervals, which is generally a time-consuming procedure.
7. Final remarks and directions for future work
This study has demonstrated that neural networks can be appropriately integrated
with cellular automata for simulating intra-urban land-use dynamics. Cities are
open and nonlinear complex systems (Yeh and Li 2003). Defining parameter values
Table 7. Fuzzy similarity measures for the three best simulations of urban land-use change inPiracicaba: 1985–1999.
Simulations (Sn)
Fuzzy similarity measures
Window 363 Window 565 Window 767
S1 0.839 0.842 0.845S2 0.845 0.848 0.850S3 0.834 0.836 0.838
Modelling intra-urban land-use dynamics 959
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

for assessing the relative importance of the intra-urban land-use change drivers in
traditional CA models is usually done on a basis of trial-and-error approaches,
which rely on the test of many possible parameter values in the search of an optimal
fit (Li and Yeh 2002). These procedures are commonly computation-intensive and
time-consuming, and do not always provide the best results. Neural networks, in
view of their ability to model nonlinear features and handle noisy, redundant, and
inaccurate spatial data, were shown to be robust and efficient for calibrating such
models, thus saving time and effort in automatically determining these parameter
values.
The ANN-based CA simulation model has been successfully applied to a medium-
sized town, Piracicaba, located in Sao Paulo State, south-east of Brazil.
DINAMICA is endowed with a stochastic structure, which embodies unpredict-
ability and chance in the logic of land-use change as observed in reality. And this is
precisely what differs DINAMICA from other exclusively ANN-based simulation
models (Yeh and Li 2003, Pijanowski et al. 2005), in which neural networks are used
not only for parameterizing the model, i.e. assessing the variables weights, but also
for accomplishing land-use transitions. In such models, randomization does not play
a direct role in the transitions themselves.
The ANN-generated maps of transition probabilities reflect the influence the set
of selected variables have in defining the compatibility extent between the predicted
and real land-use change areas, the latter shown in the land-use transition maps.
Researchers, planners, practitioners, and consultants in the urban field are able to
deal interactively with the model, so as to include or suppress one or more variables
and then evaluate the resulting impacts such changes produce in the land-use change
probabilities and land-use simulation maps. In this sense, the SNNS-generated maps
of transition probabilities can help planners and policy makers understand the
spatial driving forces and current trends of intra-urban dynamics, and hence
subsidise their actions towards urban development and regulations as well as
technical and social infrastructure implementation. Since knowledge can be easily
learned by the model and stored for further simulation (Li and Yeh 2001), future
land-use change alternatives could also be simulated on the basis of ANN-calibrated
land-use transition probability maps, so as to anticipate possible urban development
scenarios and orientate upcoming planning actions and policies.
Neural networks present though some inherent limitations in the sense that they
do not offer explicit knowledge on the process of assessing the weights of variables
driving land-use change. Moreover, the user’s intervention in defining the training
algorithm, the net architecture and its parameters are still important for the quality
of results. The SNNS environment itself enables users to initially assign more
importance to certain driving variables (input neurons) in comparison with others,
according to their a priori judgements. In this way, further studies are needed to
assess the responsiveness of simulations in the face of variations in the type,
structure, and internal parameters of the network.
Acknowledgements
The authors wish to thank the Piracicaba Water Supply and Waste Water Disposal
Department and the Piracicaba Planning Secretariat for providing the city maps. We
are also grateful for the help and cooperation of the technical and administrative
staff of the Centre for Remote Sensing of the Federal University of Minas Gerais
(CSR-UFMG). This study has received financial support from the Remote Sensing
960 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

Division of the Brazilian National Institute for Space Research (DSR/INPE). And
finally, the authors would like to thank the anonymous reviewers for their valuable
contributions in improving the quality of this paper.
ReferencesALMEIDA, C.M., 2003, Spatial dynamic modelling as a planning tool: simulation of urban
land use change in Bauru and Piracicaba (SP), Brazil. Sao Jose dos Campos.
Published PhD thesis, Brazilian National Institute for Space Research (INPE-10567-
TDI/942/B).
ALMEIDA, C.M., BATTY, M., MONTEIRO, A.V.M., CAMARA, G., SOARES-FILHO, B.S.,
CERQUEIRA, G.C. and PENNACHIN, C.L., 2003, Stochastic cellular automata
modelling of urban land use dynamics: empirical development and estimation.
Computers, Environment and Urban Systems, 27, pp. 481–509.
BATTY, M., COUCLELIS, H. and EICHEN, M., 1997, Urban systems as cellular automata.
Environmental and Planning B, 24, pp. 175–192.
BISHOP, C.M., 1995, Neural Networks for Pattern Recognition (Oxford: Oxford University
Press).
CLARKE, K.C. and GAYDOS, L., 1998, Loose-coupling a cellular automaton model and GIS:
long-term urban growth predictions for San Francisco and Baltimore. International
Journal of Geographical Information Science, 12, pp. 699–714.
CLARKE, K.C., HOPPEN, S. and GAYDOS, L.J., 1997, A self-modifying cellular automaton
model of historical urbanization in the San Francisco Bay area. Environment and
Planning B, 24, pp. 247–261.
COSTANZA, R., 1989, Model goodness of fit: a multiple resolution procedure. Ecological
Modeling, 47, pp. 199–215.
COUCLELIS, H., 1985, Cellular worlds: a framework for modeling micro-macro dynamics.
Environmental and Planning A, 17, pp. 585–596.
DEADMAN, P., BROWN, R.D. and GIMBLETT, P., 1993, Modeling rural residential settlement
patterns with cellular automata. Journal of Environmental Management, 37, pp.
147–160.
ENGELEN, G., WHITE, R. and ULJEE, I., 1997, Integrating constrained cellular automata
models, GIS and decision support tools for urban planning and policy making. In
Decision Support Systems in Urban Planning, H.P.J. Timmermans (Ed.), pp. 125–155
(London: E&FN Spon, 1997).
FISCHER, M.M. and ABRAHART, R.J., 2000, Neurocomputing—Tools for Geographers. In
GeoComputation, S. Openshaw and R.J. Abrahart (Eds), pp. 187–217 (New York:
Taylor & Francis, 2000).
FLETCHER, D. and GOSS, E., 1993, Forecasting with neural networks: an application using
bankruptcy data. Information and Management, 24, pp. 159–167.
GUAN, Q. and WANG, L., 2005, An Artificial-Neural-Network-Based Constrained CA
Model for Simulating Urban Growth and Its Application. In Auto-Carto Con-
ference, 18–23 March 2005, Las Vegas, NV. Available online at: http://www.
geog.ucsb.edu/,guan/papers/ Guan_AutoCarto2005.pdf (accessed 26 December
2005).
HAGEN, A., 2003, Multi-method assessment of map similarity. In 5th AGILE Conference on
Geographic Information Science, 25–27 April 2002, Palma, Spain (Palma: Universitat
de les Illes Balears), pp. 171–182.
HAYKIN, S.S., 1999, Neural Networks: A Comprehensive Foundation (Upper Saddle River, NJ:
Prentice-Hall).
KAVZOGLU, T. and MATHER, P.M., 1999, Pruning artificial neural networks: an example
using land cover classification of multi-sensor images. International Journal of Remote
Sensing, 20, pp. 2787–2803.
Modelling intra-urban land-use dynamics 961
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

KAVZOGLU, T. and MATHER, P.M., 2003, The use of backpropagation artificial neural
networks in land cover classification. International Journal of Remote Sensing, 24, pp.
4907–4938.
LI, X. and YEH, A.G., 2000, Modeling sustainable urban development by the integration of
constrained cellular automata and GIS. International Journal of Geographical
Information Science, 14, pp. 131–152.
LI, X. and YEH, A.G., 2001, Calibration of cellular automata by using neural networks for the
simulation of complex urban systems. Environmental and Planning A, 33, pp.
1445–1462.
LI, X. and YEH, A.G., 2002, Neural-network-based cellular automata for simulating multiple
land use changes using GIS. International Journal of Geographical Information
Science, 16, pp. 323–343.
MOORE, T., 2000, Geospatial expert systems. In GeoComputation, S. Openshaw and R.J.
Abrahart (Eds), pp. 127–159 (New York: Taylor & Francis, 2000).
OPENSHAW, S., 1998, Neural network, genetic, and fuzzy logic models of spatial interaction.
Environmental and Planning A, 30, pp. 1857–1872.
PAOLA, J.D. and SCHOWENGERDT, R.A., 1997, The effect of neural-network structure on a
multispectral land-use/land-cover classification. Photogrammetric Engineering &
Remote Sensing, 63, pp. 535–544.
PHIPPS, M., 1989, Dynamical behaviour of cellular automata under constraints of
neighbourhood coherence. Geographical Analysis, 21, pp. 197–215.
PHIPPS, M. and LANGLOIS, A., 1997, Spatial dynamics, cellular automata, and parallel
processing computers. Environmental and Planning B, 24, pp. 193–204.
PIJANOWSKI, B.C., BROWN, D., SHELLITO, B. and MANIK, G., 2002a, Using neural networks
and GIS to forecast land use changes: A land transformation model. Computers,
Environment and Urban Systems, 26, pp. 553–575.
PIJANOWSKI, B.C., PITHADIA, S., SHELLITO, B.A. and ALEXANDRIDIS, K., 2005, Calibrating a
neural network-based urban change model for two metropolitan areas of the Upper
Midwest of the United States. International Journal of Geographical Information
Science, 19, pp. 197–215.
PIJANOWSKI, B.C., SHELLITO, B.A., PITHADIA, S. and ALEXANDRIDIS, K., 2002b, Using
artificial neural networks, geographic information systems and remote sensing to
model urban sprawl in coastal watersheds along eastern Lake Michigan. Lakes and
Reservoirs, 7, pp. 271–285.
PONTIUS, G., 2002, Statistical methods to partition effects of quantity and location during
comparison of categorical maps at multiple resolutions. Photogrammetric Engineering
and Remote Sensing, 68, pp. 1041–1049.
RIEDMILLER, M. and BRAUN, H., 1993, A direct adaptive method for faster backpropagation
learning: the RPROP algorithm. In IEEE International Conference on Neural
Networks, 28 March–1 April 1993, San Francisco (San Francisco: ICNN), pp.
586–591.
RUMELHART, D.E., HINTON, G.E. and WILLIAMS, R.J., 1986, Learning representations by
back-propagation errors. Nature, 323, pp. 533–536.
SOARES-FILHO, B.S., ALENCAR, A., NEPSTAD, D., CERQUEIRA, G.C., DIAL, M., DEL, C.,
SOLOZARNO, L. and VOLL, E., 2004, Simulating the response of land-cover changes to
road paving and governance along a major Amazon Highway: the Santarem-Cuiaba
corridor. Global Change Biology, 10, pp. 745–764.
SOARES-FILHO, B.S., CERQUEIRA, G.C. and PENNACHIN, C.L., 2002, DINAMICA—a
stochastic cellular automata model designed to simulate the landscape dynamics in
an Amazonian colonization frontier. Ecological Modelling, 154, pp. 217–235.
TAKEYAMA, M. and COUCLELIS, H., 1997, Map dynamics: integrating cellular automata and
GIS through geo-algebra. International Journal of Geographical Information Science,
11, pp. 73–91.
962 C. M. Almeida et al.
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009

WANG, F., 1994, The use of artificial neural networks in a geographical information system
for agricultural land-suitability assessment. Environment and Planning A, 26, pp.
265–284.
WARD, D.P., MURRAY, A.T. and PHINN, S.R., 1999, An optimized cellular automata
approach for sustainable urban development in rapidly urbanizing regions. Available
online at: http://www.geovista.psu.edu/sites/geocomp99/Gc99/025/gc_025.htm
(accessed 30 October 2002).
WU, F., 1996, A linguistic cellular automata simulation approach for sustainable urban
development in a fast growing region. Computers, Environment and Urban Systems,
20, pp. 367–387.
YEH, A.G. and LI, X., 2003, Simulation of development alternatives using neural networks,
cellular automata, and GIS for urban planning. Photogrammetric Engineering and
Remote Sensing, 69, pp. 1043–1052.
Modelling intra-urban land-use dynamics 963
Downloaded By: [Inst Nac De Pesquisas Espacia] At: 21:38 4 August 2009




















