Application of a three-dimensional ray-tracing technique to global P, PP and Pdiff traveltime...
11
Application of a three-dimensional ray-tracing technique to global P, PP and Pdiff traveltime tomography A. Gorbatov, 1, * Y. Fukao 1 and S. Widiyantoro 2 1 Earthquake Research Institute, University of Tokyo, Yayoi 1-1-1, Bunkyo-ku, Tokyo 113–0032, Japan 2 Institut Teknologi Bandung, Jl. Ganesa 10, Bandung 40132, Indonesia Accepted 2001 March 22. Received 2001 February 4; in original form 2000 April 7 SUMMARY A 3-D ray-path tracing algorithm was successfully applied to global P-wave traveltime tomography. The inversion was conducted iteratively using the resultant P-wave velocity model as the initial model for the subsequent iteration. The LSQR method was adopted to solve a large and sparse system of equations. This iteratively linearized inversion with 3-D ray tracing increased wave-speed anomalies, located heterogeneities better and reduced smearing as compared to those derived from a conventional one-step inversion using 1-D ray tracing, although the general pattern of velocity anomalies was similar. A major difference was found in the lowermost mantle, where the departure of a ray path from the great circle path tends to be in general greatest. In particular, a pronounced high- velocity anomaly develops beneath the Indian Ocean, a feature not obvious in the result of 1-D inversion. The final P-wave velocity model was obtained by including reported PP and Pdiff traveltime data. The addition of the PP data sharpened the images and enhanced velocity anomalies in the upper mantle, especially at latitudes above 45u of the Northern Hemisphere. The addition of the Pdiff data sharpened and amplified velocity anomalies in the lowermost mantle in general. Key words: inversion, ray tracing, traveltime tomography. 1 INTRODUCTION Traveltime tomography has become a powerful tool in the study of the Earth’s structure since the pioneering work of Aki & Lee 1976). Later, Sengupta & Toksoz (1976) and Dziewonski et al. (1977) extended the tomographic technique to the global scale, showing how powerful the tomographic method is in imaging the Earth’s large volume. Numerous global, regional and local tomographic models have now been reported. The inclusion of later-arrival data increased the resolution of velocity anomaly mapping (e.g. Van der Hilst 1990; Vasco et al. 1995; Vasco & Johnson 1998). The technique of tomographic inversion has also been developed and refined. The medium parametrization was changed from the simple regular blocks adopted in the early studies to irregular cells (e.g. Fukao et al. 1992; Sambridge & Gudmundsson 1998; Bijwaard et al. 1998) or node parametrization (e.g. Zhao et al. 1992). The ray-tracing algorithms advanced and 3-D ray-tracing techniques replaced 1-D techniques in local tomography (e.g. Thurber 1983; Zhao et al. 1992). Recently, such techniques have also been implemented in global-scale tomography by e.g. Bijwaard & Spakman (2000), Gorbatov et al. (2000) and Widiyantoro et al. (2000). Further improvement of the mantle model may be achieved through the addition of later-arrival data, as was suggested by Vasco et al. (1998). In the present study we incorporate a 3-D ray- tracing algorithm into the whole-mantle tomography and include PP and Pdiff data in the traveltime data. We present a new P-velocity model of the whole mantle and discuss how the effects of the incorporation of 3-D ray tracing and inclusion of PP and Pdiff data are reflected in the new model. 2 DATA The arrival times of P, PP and Pdiff phases with hypocentral parameters used in the study are selected from the carefully com- piled and processed catalogue of global seismicity published by Engdahl et al. (1998). This data set is based on the International Seismological Data Centre catalogue, continuously updated with more recent observations. The hypocentre parameters are deter- mined using a non-linear scheme, with the inclusion of depth * Now at: Research School of Earth Sciences, the Australian National University, Canberra ACT 0200, Australia Geophys. J. Int. (2001) 146, 583–593 # 2001 RAS 583 at Geoscience Australia on June 12, 2014 http://gji.oxfordjournals.org/ Downloaded from
Transcript of Application of a three-dimensional ray-tracing technique to global P, PP and Pdiff traveltime...

Application of a three-dimensional ray-tracing technique to globalP, PP and Pdiff traveltime tomography
A. Gorbatov,1,* Y. Fukao1 and S. Widiyantoro2
1 Earthquake Research Institute, University of Tokyo, Yayoi 1-1-1, Bunkyo-ku, Tokyo 113–0032, Japan2 Institut Teknologi Bandung, Jl. Ganesa 10, Bandung 40132, Indonesia
Accepted 2001 March 22. Received 2001 February 4; in original form 2000 April 7
SUMMARY
A 3-D ray-path tracing algorithm was successfully applied to global P-wave traveltimetomography. The inversion was conducted iteratively using the resultant P-wave velocitymodel as the initial model for the subsequent iteration. The LSQR method was adoptedto solve a large and sparse system of equations. This iteratively linearized inversion with3-D ray tracing increased wave-speed anomalies, located heterogeneities better and reducedsmearing as compared to those derived from a conventional one-step inversion using1-D ray tracing, although the general pattern of velocity anomalies was similar. A majordifference was found in the lowermost mantle, where the departure of a ray path fromthe great circle path tends to be in general greatest. In particular, a pronounced high-velocity anomaly develops beneath the Indian Ocean, a feature not obvious in the resultof 1-D inversion. The final P-wave velocity model was obtained by including reportedPP and Pdiff traveltime data. The addition of the PP data sharpened the images andenhanced velocity anomalies in the upper mantle, especially at latitudes above 45u of theNorthern Hemisphere. The addition of the Pdiff data sharpened and amplified velocityanomalies in the lowermost mantle in general.
Key words: inversion, ray tracing, traveltime tomography.
1 I N T R O D U C T I O N
Traveltime tomography has become a powerful tool in the
study of the Earth’s structure since the pioneering work of Aki
& Lee 1976). Later, Sengupta & Toksoz (1976) and Dziewonski
et al. (1977) extended the tomographic technique to the global
scale, showing how powerful the tomographic method is in
imaging the Earth’s large volume. Numerous global, regional
and local tomographic models have now been reported. The
inclusion of later-arrival data increased the resolution of
velocity anomaly mapping (e.g. Van der Hilst 1990; Vasco et al.
1995; Vasco & Johnson 1998). The technique of tomographic
inversion has also been developed and refined. The medium
parametrization was changed from the simple regular blocks
adopted in the early studies to irregular cells (e.g. Fukao et al.
1992; Sambridge & Gudmundsson 1998; Bijwaard et al. 1998)
or node parametrization (e.g. Zhao et al. 1992). The ray-tracing
algorithms advanced and 3-D ray-tracing techniques replaced 1-D
techniques in local tomography (e.g. Thurber 1983; Zhao et al.
1992). Recently, such techniques have also been implemented
in global-scale tomography by e.g. Bijwaard & Spakman (2000),
Gorbatov et al. (2000) and Widiyantoro et al. (2000). Further
improvement of the mantle model may be achieved through
the addition of later-arrival data, as was suggested by Vasco
et al. (1998). In the present study we incorporate a 3-D ray-
tracing algorithm into the whole-mantle tomography and
include PP and Pdiff data in the traveltime data. We present a
new P-velocity model of the whole mantle and discuss how the
effects of the incorporation of 3-D ray tracing and inclusion of
PP and Pdiff data are reflected in the new model.
2 D A T A
The arrival times of P, PP and Pdiff phases with hypocentral
parameters used in the study are selected from the carefully com-
piled and processed catalogue of global seismicity published by
Engdahl et al. (1998). This data set is based on the International
Seismological Data Centre catalogue, continuously updated with
more recent observations. The hypocentre parameters are deter-
mined using a non-linear scheme, with the inclusion of depth* Now at: Research School of Earth Sciences, the Australian National
University, Canberra ACT 0200, Australia
Geophys. J. Int. (2001) 146, 583–593
# 2001 RAS 583
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from

phases (pP, pwP), and the ak135 earth model of Kennett
et al. (1995). The reported arrival times are reassociated with
seismic phases using the improved location to provide a set of
traveltimes. The variance of traveltime residuals is significantly
reduced compared with that for the original data catalogues.
The entire data set includes 7 458 864 P-wave, 155 817 PP-wave
and 129 033 Pdiff-wave arrivals. All data were corrected for
the Earth’s ellipticity and station elevations. The PP data were
also corrected for bounce-point altitude and water depth by
Engdahl et al. (1998).
For the P data the calculations of all the 3-D ray paths
are very time-consuming, hence, following the work of Van der
Hilst et al. (1997), we combined the information from event
clusters in a 1ur1ur50 km volume and station clusters in a
1ur1u region into a single summary ray path. The residual time
assigned to the summary ray was the median of all the relevant
data with residuals smaller than 5 s. Each summary ray was
composed of at least three individual rays. The resulting data
set contains 627 924 P-wave summary ray paths. The use
of summary rays reduces the uneven sampling of structure by
ray paths and the computational time required for ray tracing.
The complete data set of Pdiff and PP arrivals were used for
inversion due to the significantly smaller numbers of rays than
the P-arrival data set.
The medium was parametrized by uniform cells of 2ur2u and
19 layers down to the core–mantle boundary. The reference
1-D earth velocity model was ak135 of Kennett et al. (1995).
This earth parametrization is the same as that used by Van der
Hilst et al. (1997) so that our result may be compared directly
with their tomographic images derived by employing one-step
inversion with 1-D ray tracing.
3 M E T H O D
The fast and accurate computation of traveltimes and ray paths
in a heterogeneous earth model is essential in tomographic
studies. Several methods have been developed for such com-
putation (e.g. Farra & Madariaga 1987; Moser et al. 1992;
Nolet & Moser 1993; Snieder & Sambridge 1992) including
the pseudo-bending ray-tracing technique of Um & Thurber
(1987). Although their technique has been widely used in local
tomography, it has never been applied to global traveltime tomo-
graphy due to the relatively time-consuming algorithm and the
formalization in Cartesian coordinates. Recently, Koketsu &
Sekine (1998) extended the pseudo-bending technique developed
by Um & Thurber (1987) to the spherical earth. We implemented
this extended pseudo-bending ray-tracing algorithm in our tomo-
graphic code. This algorithm is based on the direct minimization
of traveltimes to construct propagation paths accordingly to
Fermat’s principle. The method searches iteratively the minimum-
traveltime ray path connecting the source and receiver, based
on a three-point perturbation with a straight-line approxi-
mation of ray-path segments. In the Pdiff ray-tracing pro-
cedure the medium is limited by the core–mantle boundary
(CMB) to prevent ray penetration below it. The application of
the algorithm of Koketsu & Sekine (1998) to global traveltime
tomography was successfully realized by Gorbatov et al. (2000)
and Widiyantoro et al. (2000).
The tomographic problem was solved in several iterations
where the system of linear equations was constructed based
on misfit between the observed traveltimes and those derived
through 3-D ray tracing in a laterally inhomogeneous model.
The resulting 3-D velocity model was used as the initial model
for subsequent iteration. Therefore, a set of linear equations
was defined as
Ai
aiIi
ciGi
26664
37775mi ¼
dti
�ai�1Ii�1mi�1
0
26664
37775 ,
where Ai is the matrix containing ray-segment lengths, ai and
ci are smoothness parameters, Ii is the identity matrix, Gi is
the matrix of gradient smoothing, dti is the data vector and mi
is the model vector containing the corresponding solutions
for slowness perturbations and hypocentral parameters for the
ith iteration. The term –aix1Iix1mix1 was included in order to
damp the result obtained towards the initial ak135 earth model
in each iteration. The system of linear equations described above
was solved by the LSQR method of Page & Saunders (1982).
Solving the system of linear equations takes about nine days on
a SUN Ultra 10 computer.
4 M O D E L D E V E L O P M E N T
Global tomographic images are commonly derived through
a one-step iteration procedure (e.g. Van der Hilst et al. 1997;
Bijwaard et al. 1998) and rarely through a multiple-step iteration
scheme (e.g. Fukao et al. 1992). However, the iterative strategy
should recover higher values of velocity perturbation than
those obtained from one-step inversion, especially if the 3-D
ray-bending algorithm is implemented in the inversion. For
example, seismic rays tend preferentially to pass through a high-
velocity zone in the vicinity of their great-circle paths. Such a
tendency makes it impossible in a linearized scheme to deter-
mine accurately both velocity anomalies and off-great-circle ray
paths in a one-step inversion and inherently requires iteration.
Iteration also reduces the influence of damping when a modi-
fication of the model is required by the data. The addition of
PP and Pdiff data could also enhance velocity perturbations
and improve the resolution of tomographic images. To evaluate
these influences, we compare the model with 1-D ray tracing,
the model with 3-D ray tracing and the model with 3-D ray
tracing including PP and Pdiff data.
4.1 P-wave model
The 3-D P-wave velocity model was developed using the same
parametrization as that employed by Van der Hilst et al. (1997).
However, the data set used in this study is more extensive than
the catalogue exploited by Van der Hilst et al. (1997), and this
difference could give additional differences between the images
of their model and our model. Iteration was repeated three times
to obtain the final solution. The first iteration corresponds to
an ordinary tomographic inversion with 1-D ray tracing. The
variance reduction was 49 per cent at this stage. A similar
variance reduction was obtained by Van der Hilst et al. (1997).
The subsequent runs were made by incorporating 3-D ray
tracing. The further variance reduction was 14 per cent after
the second iteration and 9 per cent (corresponding to a residual
standard deviation of 1.01 s) after the third iteration. The tomo-
graphic image after the third iteration did not differ visually
584 A. Gorbatov, Y. Fukao and S. Widiyantoro
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from

from the image after the second iteration and the improve-
ment of residual standard deviation was less than 5 per cent.
Therefore, we adopted the result of the third iteration as the
final one. Although the images derived from the 1-D and 3-D
ray-tracing techniques are in general similar, they do show
differences as well. The differences include the enhancement
of velocity perturbations and the sharpening of tomographic
images.
Fig. 1(a) shows the root-mean-square (rms) velocity per-
turbation of each layer from the Earth’s surface to the CMB,
indicating that the iterative inversion scheme has gained a
significant fraction of velocity perturbation at each iteration
step. About 70 per cent of the total perturbation was achieved
by the first iteration but the remaining 30 per cent was attained
through subsequent iterations. The latter increase in velocity
perturbation is a consequence of the implementation of the 3-D
ray-tracing algorithm. Note that the velocity perturbation in
the transition region takes its relative maximum at depths of
520–660 km, just above the 660 km discontinuity (Fukao et al.
2000). Fig. 1(b) plots the spherically averaged velocity per-
turbation relative to the reference model ak135 as a function
of layer depth. In general, there is little systematic increase
or decrease of average perturbation among the first, second
and third iterations, demonstrating that the 3-D ray-tracing
algorithm does not bias the estimate of the spherically averaged
structure. A relatively large negative shift (yx0.05 per cent)
during the second and third iterations at depths of 520–660 and
1000–1200 km and a relatively large positive shift (y+0.15 per
cent) occurred at depths below 2400 km.
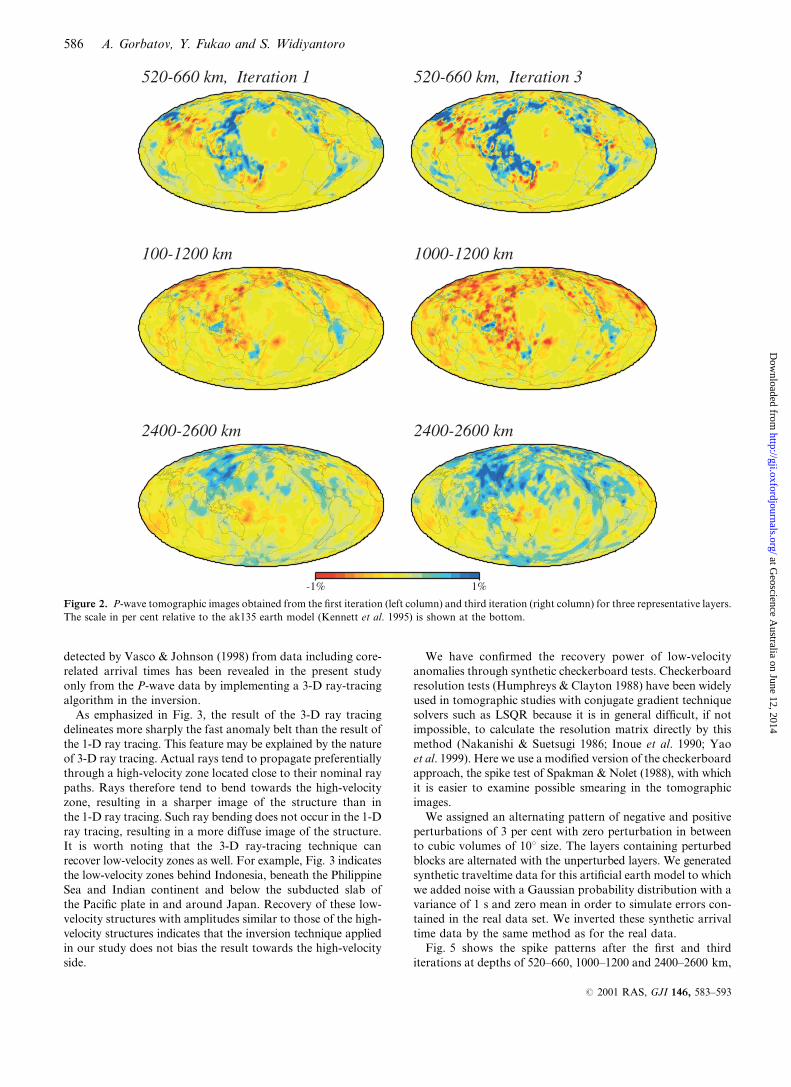
In order to see the effect of 3-D ray bending we compare the
tomographic maps after the first iteration to those after the third
iteration in the three layers at depths of 520–660, 1000–1200
and 2400–2600 km. The comparison in Fig. 2 clearly demon-
strates that the implementation of the 3-D ray tracing has
enhanced velocity perturbations and sharpened velocity contrasts
in general. Consequently, the dominance of slow anomalies at
depths of 1000–1200 km and the dominance of fast anomalies
at depths of 2400–2600 km (relative to ak135) have been
emphasized more.
Fig. 3 is a more detailed comparison of the maps at depths of
410–520 km in Asia, demonstrating again the effect of taking
into account off-great-circle ray bending, which has delineated
more sharply the fast anomaly belt associated with the sub-
ducted lithospheric slab. This point has been discussed more
fully in the tomographic study aimed at elucidating the details of
subducted slabs in the northern Pacific (Gorbatov et al. 2000).
Fig. 4 is a perturbation map at great depths (2600–2750 km)
below the Indian Ocean and shows an even more dramatic
demonstration of this effect. In this figure the tomographic map
after the third iteration (Fig. 4b) shows a pronounced high-
velocity zone extending southwards from India to the Indian
Ocean region, while that after the first iteration (1-D ray bending,
Fig. 4a) does not. This pronounced high-velocity anomaly has
not been identified by Van der Hilst et al. (1997) and Bijwaard
et al. (1998), but was imaged by Vasco & Johnson (1998), who
used a more extensive data set with the inclusion of PcP and
PKP data. Note that the solution at each iteration is always
damped towards the initial 1-D model so that the solution
should remain unchanged from the that at the first iteration
if the 3-D ray-bending effect were ignored. We attribute the
intensification of the high-velocity anomaly beneath the Indian
Ocean to the effect of ray bending in three dimensions. Of
course, the intensification of anomalies, in general, could also
be achieved by suppressing the damping parameter without
employing 3-D ray tracing. The intensification in this case
is, however, a product of allowing a larger amount of short-
wavelength perturbations and should be different from the con-
sequence of considering the effect of 3-D bending. To clarify
this point, we performed experiments on the linear (first) iteration
with reduced values of the damping factor. Fig. 4(c) shows
the result for the case with the damping parameter reduced to
a half. This underdamped solution gives a patchy image with
high-velocity spots beneath the Indian Ocean and East India.
This patchy image is, however, clearly different from the image
shown in Fig. 4(b), where the relevant high-velocity anomaly is
a broad, coherent feature with amplitudes as large as those in
the underdamped solution. The iterative non-linear inversion
has thus revealed structures usually overdamped in the linear
inversions without introducing unstable, short-wavelength per-
turbations. We have also emphasized, in conjunction with Fig. 3,
the fact that 3-D ray tracing delineates more sharply a fast
anomaly belt such as the one associated with subducted slabs
than the result of the 1-D ray tracing. This feature may be
explained by the nature of 3-D ray tracing. Actual rays tend to
propagate preferentially through a high-velocity zone located
close to their nominal ray paths. Thus, the deepest anomaly
(a)
(b)Figure 1. (a) Rms velocity perturbation values as a function of depth
for the P-wave tomographic models of Obayashi et al. (1997), van der
Hilst et al. (1997) and those obtained in the present study from the first,
second and third iterations. (b) Average perturbation values relative
to the ak135 earth model (Kennett et al. 1995) for the P-wave tomo-
graphic models obtained in this study from the first, second and third
iterations.
P, PP and Pdiff traveltime tomography 585
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from
detected by Vasco & Johnson (1998) from data including core-
related arrival times has been revealed in the present study
only from the P-wave data by implementing a 3-D ray-tracing
algorithm in the inversion.
As emphasized in Fig. 3, the result of the 3-D ray tracing
delineates more sharply the fast anomaly belt than the result of
the 1-D ray tracing. This feature may be explained by the nature
of 3-D ray tracing. Actual rays tend to propagate preferentially
through a high-velocity zone located close to their nominal ray
paths. Rays therefore tend to bend towards the high-velocity
zone, resulting in a sharper image of the structure than in
the 1-D ray tracing. Such ray bending does not occur in the 1-D
ray tracing, resulting in a more diffuse image of the structure.
It is worth noting that the 3-D ray-tracing technique can
recover low-velocity zones as well. For example, Fig. 3 indicates
the low-velocity zones behind Indonesia, beneath the Philippine
Sea and Indian continent and below the subducted slab of
the Pacific plate in and around Japan. Recovery of these low-
velocity structures with amplitudes similar to those of the high-
velocity structures indicates that the inversion technique applied
in our study does not bias the result towards the high-velocity
side.
We have confirmed the recovery power of low-velocity
anomalies through synthetic checkerboard tests. Checkerboard
resolution tests (Humphreys & Clayton 1988) have been widely
used in tomographic studies with conjugate gradient technique
solvers such as LSQR because it is in general difficult, if not
impossible, to calculate the resolution matrix directly by this
method (Nakanishi & Suetsugi 1986; Inoue et al. 1990; Yao
et al. 1999). Here we use a modified version of the checkerboard
approach, the spike test of Spakman & Nolet (1988), with which
it is easier to examine possible smearing in the tomographic
images.
We assigned an alternating pattern of negative and positive
perturbations of 3 per cent with zero perturbation in between
to cubic volumes of 10u size. The layers containing perturbed
blocks are alternated with the unperturbed layers. We generated
synthetic traveltime data for this artificial earth model to which
we added noise with a Gaussian probability distribution with a
variance of 1 s and zero mean in order to simulate errors con-
tained in the real data set. We inverted these synthetic arrival
time data by the same method as for the real data.
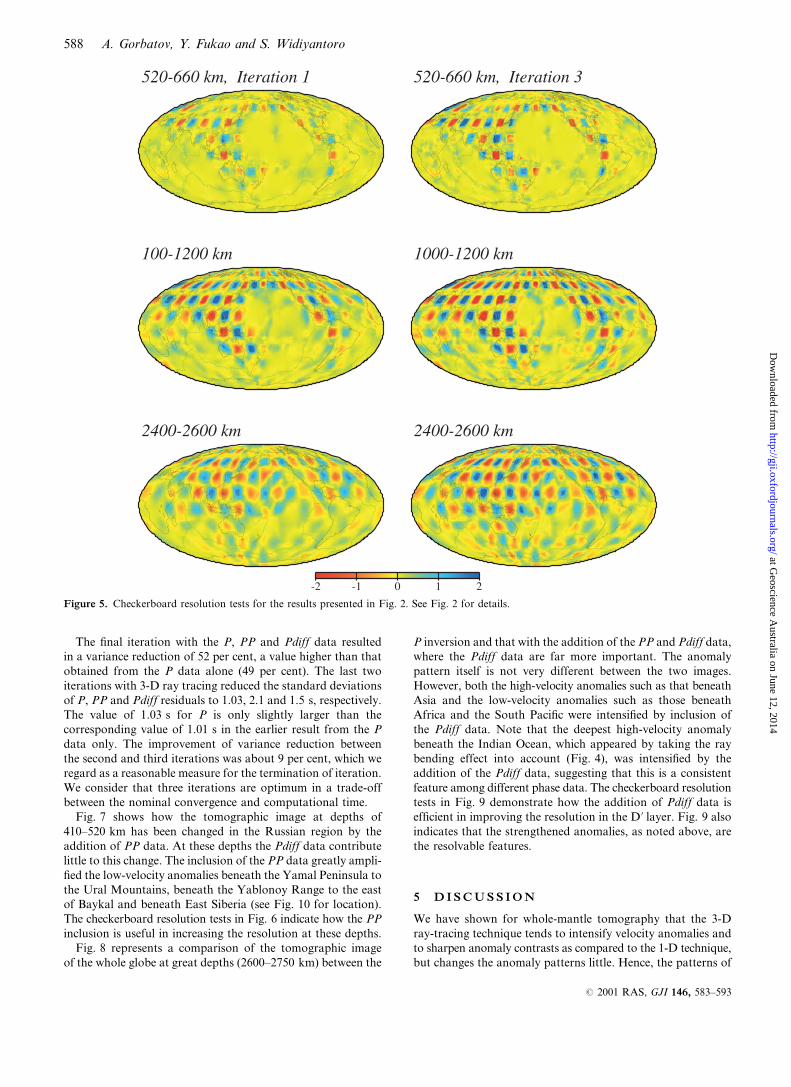
Fig. 5 shows the spike patterns after the first and third
iterations at depths of 520–660, 1000–1200 and 2400–2600 km,
-1% 1%
2400-2600 km
100-1200 km
520-660 km, Iteration 1 520-660 km, Iteration 3
1000-1200 km
2400-2600 km
Figure 2. P-wave tomographic images obtained from the first iteration (left column) and third iteration (right column) for three representative layers.
The scale in per cent relative to the ak135 earth model (Kennett et al. 1995) is shown at the bottom.
586 A. Gorbatov, Y. Fukao and S. Widiyantoro
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from

which can serve as a check for the patterns at the same depths
obtained from the real data (Fig. 2). A comparison of these
patterns clearly indicates that, for a given ray path coverage,
the 3-D ray tracing has recovered the intensities and patterns
of the original perturbation more satisfactorily than the 1-D
ray tracing. This comparison also demonstrates that the 3-D
ray tracing does not bias the resultant pattern systematically
towards either the high- or the low-velocity side.
4.2 Addition of PP and Pdiff data
Exploitation of additional data could increase the resolution
of tomographic images and introduce new information into
the inversion results. PP seismic data were successfully included
previously (e.g. Van der Hilst 1990; Vasco et al. 1995; Vasco &
Johnson 1998), although the reading of PP arrivals is inherently
more difficult than first-arrival reading, in part because PP is
a later phase and in part because it is shifted in phase by p /2
relative to P (Choy & Richards 1975; Darragh 1985; Woodward
& Masters 1991; Paulseen & Stutzman 1996). No attempt has
been made so far to incorporate reported Pdiff data into tomo-
graphic inversions. In an attempt to improve our tomographic
image we will add the PP and Pdiff arrival times to the P data,
all from the newly compiled data set of Engdahl et al. (1998).
-10˚
0˚
10˚
20˚
30˚
40˚
50˚
(a)
410-520 km
70˚ 80˚ 90˚ 100˚ 110˚ 120˚ 130˚ 140˚ 150˚-10˚
0˚
10˚
20˚
30˚
40˚
50˚
-1% -0.5 0.0 0.5 1%
(b)
Figure 3. Comparison of tomographic images obtained from the first
(a) and third (b) iterations for Asia at the 410–520 km layer. Note that
the third non-linear iteration produces a sharper image than the first
iteration corresponding to the conventional linearized tomography.
The scale in per cent relative to the ak135 earth model (Kennett et al.
1995) is shown at the bottom.
-30˚
-20˚
-10˚
0˚
10˚
20˚
30˚
a)
2750 km
-30˚
-20˚
-10˚
0˚
10˚
20˚
30˚
b)
20˚ 30˚ 40˚ 50˚ 60˚ 70˚ 80˚ 90˚ 100˚ 110˚ 120˚-30˚
-20˚
-10˚
0˚
10˚
20˚
30˚
-0.5% 0.5%
c)
(a)
(b)
(c)
Figure 4. Results of tomographic inversion at a depth of 2750 km
below the Indian Ocean (a) from the first linear iteration, (b) from the
third non-linear iteration, and (c) from the first linear iteration with
the damping parameter decreased by a factor of two (see text for
explanation).
P, PP and Pdiff traveltime tomography 587
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from
The final iteration with the P, PP and Pdiff data resulted
in a variance reduction of 52 per cent, a value higher than that
obtained from the P data alone (49 per cent). The last two
iterations with 3-D ray tracing reduced the standard deviations
of P, PP and Pdiff residuals to 1.03, 2.1 and 1.5 s, respectively.
The value of 1.03 s for P is only slightly larger than the
corresponding value of 1.01 s in the earlier result from the P
data only. The improvement of variance reduction between
the second and third iterations was about 9 per cent, which we
regard as a reasonable measure for the termination of iteration.
We consider that three iterations are optimum in a trade-off
between the nominal convergence and computational time.
Fig. 7 shows how the tomographic image at depths of
410–520 km has been changed in the Russian region by the
addition of PP data. At these depths the Pdiff data contribute
little to this change. The inclusion of the PP data greatly ampli-
fied the low-velocity anomalies beneath the Yamal Peninsula to
the Ural Mountains, beneath the Yablonoy Range to the east
of Baykal and beneath East Siberia (see Fig. 10 for location).
The checkerboard resolution tests in Fig. 6 indicate how the PP
inclusion is useful in increasing the resolution at these depths.
Fig. 8 represents a comparison of the tomographic image
of the whole globe at great depths (2600–2750 km) between the
P inversion and that with the addition of the PP and Pdiff data,
where the Pdiff data are far more important. The anomaly
pattern itself is not very different between the two images.
However, both the high-velocity anomalies such as that beneath
Asia and the low-velocity anomalies such as those beneath
Africa and the South Pacific were intensified by inclusion of
the Pdiff data. Note that the deepest high-velocity anomaly
beneath the Indian Ocean, which appeared by taking the ray
bending effect into account (Fig. 4), was intensified by the
addition of the Pdiff data, suggesting that this is a consistent
feature among different phase data. The checkerboard resolution
tests in Fig. 9 demonstrate how the addition of Pdiff data is
efficient in improving the resolution in the Dk layer. Fig. 9 also
indicates that the strengthened anomalies, as noted above, are
the resolvable features.
5 D I S C U S S I O N
We have shown for whole-mantle tomography that the 3-D
ray-tracing technique tends to intensify velocity anomalies and
to sharpen anomaly contrasts as compared to the 1-D technique,
but changes the anomaly patterns little. Hence, the patterns of
-2 -1 0 1 2
2400-2600 km
100-1200 km
520-660 km, Iteration 1 520-660 km, Iteration 3
1000-1200 km
2400-2600 km
Figure 5. Checkerboard resolution tests for the results presented in Fig. 2. See Fig. 2 for details.
588 A. Gorbatov, Y. Fukao and S. Widiyantoro
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from

our tomographic image are not, in general, very different from
those of previous studies (e.g. Fukao et al. 1992; Van der Hilst
et al. 1997; Bijwaard et al. 1998; Vasco & Johnson 1998). The
synthetic recovery tests for given structures have confirmed
that the application of the 3-D technique, in general, reduces
smearing in tomograms. The increase in velocity perturbation
with increasing number of iterations is clearly demonstrated
in Fig. 1. Also shown in this figure are the rms variations for
the two tomographic models of Van der Hilst et al. (1997) and
Obayashi et al. (1997) (see Fukao et al. 2000). All the curves
show a similar trend. The rms perturbation has its maximum in
the uppermost mantle, decreases rapidly with increasing depth
down to 400 km and then increases to take a relative maximum
at a depth of 500 km. The perturbation then decreases relatively
rapidly down to a depth of 1000 km. The perturbation curve in
the depth range 1000–2400 km is fairly flat with a broad mini-
mum at approximately 2000 km. At depths below 2400 km
the perturbation begins to increase sharply. The contrast in the
behaviour of the rms variation across a depth of 1000 km has
been pointed out by Tanimoto (1990), Montagner (1994) and
Wen & Anderson (1995). The above trend is common in all
the curves in Fig. 1, which provides support for the earlier
conclusion that the non-linear inversion with 3-D ray tracing
does not alter the general features of the tomographic image
of the Earth obtained by a linearized inversion with 1-D ray
tracing (Van der Hilst et al. 1997) or a non-linear inversion with
1-D ray tracing (Obayashi et al. 1997). It may be noted that the
models from the non-linear inversions, either 3-D or 1-D ray
tracing, show similar rms variations in terms of not only the
trend but also the amplitude, although a precise comparison is
meaningless because of many differences in methodology.
The addition of the PP data has improved the resolution in
the upper mantle, especially in the Russian region (Fig. 6). For
example, on the tomographic map at depths of 410–520 km in
Fig. 7, the PP addition has revealed the low-velocity anomaly
beneath the Ural Range that separates the high-velocity anomaly
20˚
30˚
40˚
50˚
30˚
40˚
20˚
30˚
40˚
50˚
30˚
40˚
410-520 km
20˚
30˚
40˚
50˚
30˚
40˚
20˚
30˚
40˚
50˚
60˚
70˚
80˚
90˚
100˚
110˚
120˚
130˚
30˚
30˚40˚
-2% 2%
410-520 km
(a)
(b)
Figure 6. Checkerboard resolution tests for the tomographic images presented in the Fig. 7. The inclusion of PP-wave arrival times (b) increases
resolution in the upper mantle.
P, PP and Pdiff traveltime tomography 589
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from
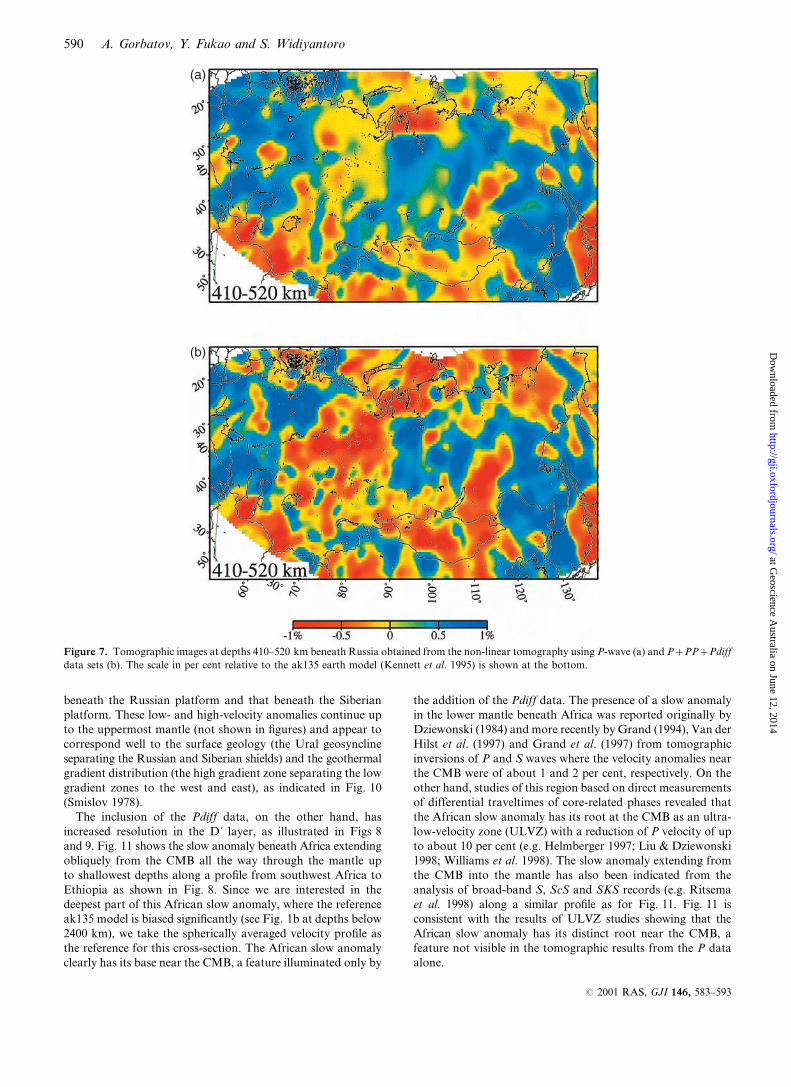
beneath the Russian platform and that beneath the Siberian
platform. These low- and high-velocity anomalies continue up
to the uppermost mantle (not shown in figures) and appear to
correspond well to the surface geology (the Ural geosyncline
separating the Russian and Siberian shields) and the geothermal
gradient distribution (the high gradient zone separating the low
gradient zones to the west and east), as indicated in Fig. 10
(Smislov 1978).
The inclusion of the Pdiff data, on the other hand, has
increased resolution in the Dk layer, as illustrated in Figs 8
and 9. Fig. 11 shows the slow anomaly beneath Africa extending
obliquely from the CMB all the way through the mantle up
to shallowest depths along a profile from southwest Africa to
Ethiopia as shown in Fig. 8. Since we are interested in the
deepest part of this African slow anomaly, where the reference
ak135 model is biased significantly (see Fig. 1b at depths below
2400 km), we take the spherically averaged velocity profile as
the reference for this cross-section. The African slow anomaly
clearly has its base near the CMB, a feature illuminated only by
the addition of the Pdiff data. The presence of a slow anomaly
in the lower mantle beneath Africa was reported originally by
Dziewonski (1984) and more recently by Grand (1994), Van der
Hilst et al. (1997) and Grand et al. (1997) from tomographic
inversions of P and S waves where the velocity anomalies near
the CMB were of about 1 and 2 per cent, respectively. On the
other hand, studies of this region based on direct measurements
of differential traveltimes of core-related phases revealed that
the African slow anomaly has its root at the CMB as an ultra-
low-velocity zone (ULVZ) with a reduction of P velocity of up
to about 10 per cent (e.g. Helmberger 1997; Liu & Dziewonski
1998; Williams et al. 1998). The slow anomaly extending from
the CMB into the mantle has also been indicated from the
analysis of broad-band S, ScS and SKS records (e.g. Ritsema
et al. 1998) along a similar profile as for Fig. 11. Fig. 11 is
consistent with the results of ULVZ studies showing that the
African slow anomaly has its distinct root near the CMB, a
feature not visible in the tomographic results from the P data
alone.
(a)
(b)
Figure 7. Tomographic images at depths 410–520 km beneath Russia obtained from the non-linear tomography using P-wave (a) and P+PP+Pdiff
data sets (b). The scale in per cent relative to the ak135 earth model (Kennett et al. 1995) is shown at the bottom.
590 A. Gorbatov, Y. Fukao and S. Widiyantoro
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from

6 C O N C L U S I O N S
Implementation of a 3-D ray-tracing technique to the whole-
mantle P-wave traveltime tomography shows that the pattern
of the tomographic image does not, in general, differ signifi-
cantly from that obtained from the conventional tomography
with 1-D ray tracing. The incorporation of 3-D ray tracing,
however, enhanced velocity anomalies and sharpened velocity
contrasts appreciably. A typical example is found beneath
the Indian Ocean in the Dk layer, where a prominent high-
velocity anomaly has appeared only by implementing this
algorithm. The addition of later seismic phases such as PP and
Pdiff has increased resolution in the upper and lowermost
mantle, respectively. In particular, a remarkable improvement
of resolution is achieved beneath Siberia due to the inclusion of
PP traveltimes, where a pair of high- and low-velocity zones
has appeared in the upper mantle that correlates well with
the Siberian shield and the Ural Range, and with low and high
heat flow regions, respectively. The inclusion of Pdiff data, on
the other hand, has increased significantly the amplitudes of
anomalies in the lowermost mantle. An example is the African
low-velocity anomaly with its roots just above the CMB
underneath southwest Africa.
-1% 1%
2600-2750 km
P+PP+Pdiff
A
A’
2600-2750 km
P
Figure 8. Tomographic images for the inversions using P (shown at
the top) and P+PP+Pdiff (shown at the bottom) data sets at the depth
range 2600–2750 km. Black solid line AAk denotes the location of the
cross-section presented in Fig. 11. Grey areas show the zones without
ray coverage. The scale in per cent relative to the ak135 earth model
(Kennett et al. 1995) is shown at the bottom.
-2 -1 0 1 2
2600-2750 km
P+PP+Pdiff
2600-2750 km
P
Figure 9. Checkerboard resolution tests for the tomographic models
presented in Fig. 8. See Fig. 8 for explanation.
2800km
410km660km
A A’
2800km
410km660km
-1% +1%Figure 11. Cross-sections of the tomographic models from the P
(shown at the top) and P+PP+Pdiff data (shown at the bottom)
across the African slow anomaly. See Fig. 8 for location. The scale in
per cent relative to the spherically averaged velocity profile of the final
model is shown at the bottom.
P, PP and Pdiff traveltime tomography 591
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from

A C K N O W L E D G M E N T S
We thank B. L. N. Kennett and M. Obayashi for useful sug-
gestions and discussions. We are very grateful to E. R. Engdahl,
R. D. van der Hilst and R. Buland for the updated version
of their hypocentre and phase global data set. G. Nolet and
J. Virieux provided us with helpful comments and suggestions
that improved the manuscript.
R E F E R E N C E S
Aki, K. & Lee, W.H.K., 1976. Determination of three-dimensional
velocity anomalies under a seismic array using first P arrival times
from local earthquakes, 1, A homogeneous initial model, J. geophys.
Res., 81, 4381–4399.
Bijwaard, H. & Spakman, W., 2000. Non-linear global P-wave
tomography by iterated linearized inversion, Geophys. J. Int., 141,
71–82.
Bijwaard, H., Spakman, W. & Engdahl, E.R., 1998. Closing the gap
between regional and global travel-time tomography, J. geophys.
Res., 103, 30 055–30 078.
Choy, G.L. & Richards, P., 1975. Pulse distortion and Hilbert
transformation in multiply reflected and refracted body waves,
Bull. seism. Soc. Am., 65, 55–70.
Darragh, R.B., 1985. Mapping of upper-mantle structure from
differential (PP-P) travel-time residuals, Phys. Earth planet Inter.,
41, 6–17.
Dziewonski, A.M., 1984. Mapping the lower mantle: determination
of lateral heterogeneity in P velocity up to degree and order 6,
J. geophys. Res., 89, 5929–5925.
Dziewonski, A.M., Hager, B.H. & O’Connell, R.J., 1977. Large-scale
heterogeneities in the lower mantle, J. geophys. Res., 82, 239–255.
Engdahl, E.R., Van der Hilst, R.D. & Buland, R.P., 1998. Global
teleseismic earthquake relocation with improved travel times
and procedures for depth determination, Bull. seism. Soc. Am., 88,
722–743.
Farra, V. & Madariaga, R., 1987. Seismic waveform modeling in
heterogeneous media by ray perturbation theory, J. geophys. Res., 92,
2697–2712.
Fukao, Y., Obayashi, M., Inoue, H. & Nenbai, M., 1992. Subducting
slabs stagnant in the mantle transition zone, J. geophys. Res., 97,
4809–4822.
Fukao, Y., Widiyantoro, S. & Obayashi, M., 2000. Stagnant slabs in
the upper and lower mantle transition region, Rev. Geophys., in press.
Gorbatov, A., Widiyantoro, S., Fukao, Y. & Gordeev, E., 2000.
Signature of remnant slabs in the North Pacific from P-wave
tomography, Geophys. J. Int., 142, 27–36.
Grand, S.P., 1994. Mantle shear structure beneath the Americas and
the surrounding oceans, J. geophys. Res., 99, 11 591–11 621.
Grand, S.P., Van der Hilst, R.D. & Widiyantoro, S., 1997. Global
seismic tomography: a snapshot of convection in the Earth, Geol.
Soc. Am. Today, 7, 1–7.
Helmberger, D.V., 1997. Extremes in CMB structure beneath Europe
and Africa, EOS Trans. Am. geophys. Un., Fall Mtng, U11A-6, F1.
Humphreys, E. & Clayton, R.W., 1988. Adaption of back projection
tomography to seismic travel time problems, J. geophys. Res., 93,
1073–1085.
Inoue, H., Fukao, Y., Tanabe, K. & Ogata, Y., 1990. Whole mantle
P-wave travel time tomography, Phys. Earth. planet. Inter., 59,
294–328.
Kennett, B.L.N., Engdahl, E.R. & Buland, R., 1995. Constraints on
seismic velocities in the Earth from traveltimes, Geophys. J. Int., 122,
108–124.
Koketsu, K. & Sekine, S., 1998. Pseudo-bending method for
three-dimensional seismic ray tracing in a spherical earth with
discontinuities, Geophys. J. Int., 132, 339–346.
Liu, X.-F. & Dziewonski, 1998. Global analysis of shear wave velocity
anomalies in the lowermost mantle, in The Core–Mantle Boundary
Region, eds Gurnis, M., Wysession, M., Knittle, E. & Buffett, B.A.,
Am. geophys. Un. Geodyn. Ser., 28, 21–36.
Montagner, J.-P., 1994. Can seismology tell us anything about
convection in the mantle, Rev. Geophys., 32, 115–137.
Moser, T.J., Nolet, G. & Snieder, R., 1992. Ray bending revised, Bull.
seism. Soc. Am., 82, 259–288.
Nakanishi, I. & Suetsugi, D., 1986. Resolution matrix calculated by a
tomographic inversion method, J. Phys. Earth, 34, 95–99.
Nolet, G. & Moser, T.J., 1993. Teleseismic delay times in a 3-D Earth
and a new look at the S discrepancy, Geophys. J. Int., 114, 185–195.
Obayashi, M., Sakurai, T. & Fukao, Y., 1997. Comparison of recent
tomographic models, in Int. Symp. New Images of the Earth’s Interior
Through Long-Term Ocean-Floor Observations, Vol. 29, Tokyo.
Page, C.C. & Saunders, M.A., 1982. LSQR: an algorithm for sparse
linear equations and sparse least squares, ACM Trans. Math. Soft.,
8, 43–71.
Paulseen, H. & Stutzman, E., 1996. On PP-P differential travel-time
measurements, Geophys. Res. Lett., 23, 1833–1836.
10 15 20 25 40
C/1000 m
64
60
56
52
48
44
40
174144967248302418
O
Siberiaplatform
Russianplatform
Ura
lR
ange
Yamal pen.
Yablonoy Ra.
Bay
kal l
ake
Figure 10. Schematic map of the heat flow distribution over the former URSS, recompiled from Smislov (1978).
592 A. Gorbatov, Y. Fukao and S. Widiyantoro
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from

Ritsema, J., Ni, S., Helmberger, D.V. & Crotwell, H.P., 1998.
Evidence for strong shear velocity reductions and velocity gradients
in the lower mantle beneath Africa, Geophys. Res. Lett., 25,
4245–4248.
Sambridge, M. & Gudmundsson, O., 1998. Tomographic systems of
equations with irregular cells, J. geophys. Res., 103, 773–781.
Sengupta, M. & Toksoz, M.N., 1976. Three-dimensional model of
seismic velocity variation in the Earth’s mantle, Geophys. Res. Lett.,
3, 84–86.
Smislov, A.A., 1978. The Map of the Geothermal Flow of the Earth
Crust of the USSR, VSEGEI, MINGEO USSR, Moscow.
Snieder, R. & Sambridge, M., 1992. Ray perturbation theory for
traveltimes and ray paths in 3-D heterogeneous media, Geophys. J.
Int., 109, 294–322.
Spakman, W. & Nolet, G., 1988. Imaging algorithms, accuracy and
resolution in delay time tomography, in Mathematical Geophysics,
pp. 155–187, eds Vlaar, N.J. et al., D. Reidel, Norwell, MA.
Tanimoto, T., 1990. Predominance of large-scale heterogeneity and
the shift of velocity anomalies between the upper and lower mantle,
J. Phys. Earth, 38, 493–509.
Thurber, C.H., 1983. Earthquake locations and three-dimensional
crustal structure in the Coyote Lake area, central California,
J. geophys. Res., 88, 8226–8236.
Um, J. & Thurber, C., 1987. A fast algorithm for two-point seismic ray
tracing, Bull. seism. Soc. Am., 77, 972–986.
Van der Hilst, R.D., 1990. Tomography with P, PP and pP delay-time
data and the three-dimensional mantle structure below the Caribbean
region, PhD thesis, Utrecht University, Utrecht, the Netherlands.
Van der Hilst, R.D., Widiyantoro, S. & Engdahl, E.R., 1997. Evidence
for deep mantle circulation from global tomography, Nature, 386,
578–584.
Vasco, D.W. & Johnson, L.R., 1998. Whole Earth structure estimated
from seismic arrival times, J. geophys. Res., 103, 2633–2671.
Vasco, D.W., Johnson, L.R. & Pulliam, R.J., 1995. Lateral variations
in mantle velocity structure and discontinuities determined from P,
PP, S, SS, and SS-SdS travel time residuals, J. geophys. Res., 100,
24 037–24 059.
Wen, L. & Anderson, D.L., 1995. The fate of slabs inferred from
seismic tomography and 130 million years of subduction, Earth planet.
Sci. Lett., 133, 185–198.
Widiyantoro, S., Gorbatov, A., Kennett, B.L.N. & Fukao, Y., 2000.
Improving global shear wave traveltime tomography using three-
dimensional ray tracing and iterative inversion, Geophys. J. Int., 141,
747–758.
Williams, Q., Revenaugh, J. & Garnero, E., 1998. A correlation
between ultra-low basal velocities in the mantle and hot spots,
Science, 281, 546–549.
Woodward, R.L. & Masters, G., 1991. Global upper mantle structure
from long-period differential travel times, J. geophys. Res., 96,
6351–6377.
Yao, Z.S., Roberts, R.G. & Tryggvason, A., 1999. Calculating
resolution and covariance matrices for seismic tomography with
the LSQR method, Geophys. J. Int., 138, 886–894.
Zhao, D., Hasegawa, A. & Horiuchi, S., 1992. Tomographic imaging
of P and S wave velocity structure beneath northeastern Japan,
J. geophys. Res., 97, 19 909–19 928.
P, PP and Pdiff traveltime tomography 593
# 2001 RAS, GJI 146, 583–593
at Geoscience A
ustralia on June 12, 2014http://gji.oxfordjournals.org/
Dow
nloaded from