An Architecture for Managing Knowledge and System Dynamism in the Worldwide Sensor Web
25
64 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited. Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited. Keywords: Bayesian Network, Conceptual Data Modeling, Multi-Agent Systems, Ontology Engineering, Semantic Middleware, Sensor Web, Uncertainty INTRODUCTION Advances in sensor technology and space sci- ence have resulted in the availability of vast quantities of both high and low quality, dis- tributed and heterogeneous earth observation data. This provides the potential for real-time monitoring of the earth and enhancement of our understanding of natural processes. The vision of Sensor Web researchers is to cre- ate a worldwide computing infrastructure that enables dynamic sharing and analysis of complex heterogeneous earth observation data sets (Balazinska et al., 2007; Gibbons, Karp, Ke, Nath, & Seshan, 2003; Liang, Croitoru, & Tao, 2005). Issues being investigated include dynamic data fusion, aggregation and analysis (Bröring et al., 2011). While current approaches provide promising ways to facilitate access to distributed sensor data, they do not provide ex- An Architecture for Managing Knowledge and System Dynamism in the Worldwide Sensor Web Deshendran Moodley, Centre for Artificial Intelligence Research, University of KwaZulu- Natal and Council for Scientific and Industrial Research, Durban, South Africa Ingo Simonis, International Geospatial Services Institute Ltd, Germany Jules Raymond Tapamo, University of KwaZulu-Natal, Durban, South Africa ABSTRACT Sensor Web researchers are currently investigating middleware to aid in the dynamic discovery, integration and analysis of vast quantities of both high and low quality, but distributed and heterogeneous earth observa- tion data. Key challenges being investigated include dynamic data integration and analysis, service discovery and semantic interoperability. However, few efforts deal with managing knowledge and system dynamism. Two emerging technologies that have shown promise in dealing with these issues are ontologies and software agents. This paper presents an integrated ontology driven agent based Sensor Web architecture for manag- ing knowledge and system dynamism. An application case study on wildfire detection is used to illustrate the operation of the architecture. DOI: 10.4018/jswis.2012010104
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of An Architecture for Managing Knowledge and System Dynamism in the Worldwide Sensor Web

64 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
Keywords: BayesianNetwork,ConceptualDataModeling,Multi-AgentSystems,OntologyEngineering,SemanticMiddleware,SensorWeb,Uncertainty
INTRODUCTION
Advances in sensor technology and space sci-ence have resulted in the availability of vast quantities of both high and low quality, dis-tributed and heterogeneous earth observation data. This provides the potential for real-time monitoring of the earth and enhancement of our understanding of natural processes. The
vision of Sensor Web researchers is to cre-ate a worldwide computing infrastructure that enables dynamic sharing and analysis of complex heterogeneous earth observation data sets (Balazinska et al., 2007; Gibbons, Karp, Ke, Nath, & Seshan, 2003; Liang, Croitoru, & Tao, 2005). Issues being investigated include dynamic data fusion, aggregation and analysis (Bröring et al., 2011). While current approaches provide promising ways to facilitate access to distributed sensor data, they do not provide ex-
An Architecture for Managing Knowledge and System Dynamism in the Worldwide Sensor Web
DeshendranMoodley,CentreforArtificialIntelligenceResearch,UniversityofKwaZulu-NatalandCouncilforScientificandIndustrialResearch,Durban,SouthAfrica
IngoSimonis,InternationalGeospatialServicesInstituteLtd,Germany
JulesRaymondTapamo,UniversityofKwaZulu-Natal,Durban,SouthAfrica
ABSTRACTSensorWebresearchersarecurrentlyinvestigatingmiddlewaretoaidinthedynamicdiscovery,integrationandanalysisofvastquantitiesofbothhighandlowquality,butdistributedandheterogeneousearthobserva-tiondata.Keychallengesbeinginvestigatedincludedynamicdataintegrationandanalysis,servicediscoveryandsemanticinteroperability.However,feweffortsdealwithmanagingknowledgeandsystemdynamism.Twoemergingtechnologiesthathaveshownpromiseindealingwiththeseissuesareontologiesandsoftwareagents.ThispaperpresentsanintegratedontologydrivenagentbasedSensorWebarchitectureformanag-ingknowledgeandsystemdynamism.Anapplicationcasestudyonwildfiredetectionisusedtoillustratetheoperationofthearchitecture.
DOI: 10.4018/jswis.2012010104

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 65
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
plicit support to formalize and expose scientific understanding and common belief as an explicit and integral component of the Sensor Web.
Scientific understanding and theories in the earth sciences are constantly evolving. Natural processes depend on dynamic micro-scale and meso-scale environments. Processes may vary significantly at different locations and typically change over time. Subsequently, theoretical positions differ greatly and may even be con-tradictory. An integral part of data analysis and scientific enquiry is the application of different theories to analyse incoming observations. Well-founded and established theories can be incorporated into end user applications to aid decision support, while new theories can be constantly adapted and evaluated against incom-ing observations to test their validity. Moreover, data mining and pattern analysis techniques can be continuously applied to data over time to capture new patterns, formulate new theories and to refine existing theories. Ultimately the scientific community should publish dynamic and formal models of their theories and valida-tion data online for immediate dissemination and reproducibility. This has the potential to accelerate and reduce the cost and effort for scientific discovery, and lower the barrier for end users to access the latest data analysis and simulation models to improve decision-making and planning.
The Sensor Web approach provides a more ambitious vision than current international ac-tivities, such as the Global Earth Observation System of Systems (GEOSS) (http://www.earthobservation.org) or the Infrastructure for Spatial Information in Europe (http://inspire.eu). (INSPIRE). It involves constructing a worldwide computing infrastructure that enables sharing, analysis and distribution of earth observation data. The availability of new and richer data sets provides new avenues for research and the potential for a better under-standing of our natural environment. In Sensor Web applications, data transformation, data analysis, and information extraction algorithms are assembled into executable workflows. These workflows are continuously applied to sensor
data to extract and deliver relevant information to decision makers. The algorithms, theories and knowledge used to compose individual workflows can be captured, shared and recon-figured for reuse in other workflows. This can ease the development of new applications and facilitate scientific experimentation.
Sensor Web research is still centered on the discovery, sharing and querying of data with many researchers taking a bottom up, data centric view (Balazinska et al., 2007; Janowicz, Schade, Bröring, Keßler, Maué, & Stasch, 2010). Though the Sensor Web has reached a level of maturity where sensor data can be transported and processed at several levels of abstraction, the integration of belief based assumptions with mathematic models is not properly addressed in current research. Scientists are still not fully empowered to cap-ture and share their knowledge. The ability to capture and formalize knowledge and to evolve knowledge to incorporate new data and new analysis results, i.e., knowledgedynamism, is missing in the Sensor Web. The management of knowledge dynamism would open new av-enues for research and the potential for a better understanding of our natural environment.
Two emerging technologies that have shown promise in dealing with these challenges are ontologies and software agents. Ontology based approaches (Corcho & Garcia-Castro, 2010; Stock, Hobona, Granell, & Jackson, 2011) have shown some success in modeling and querying distributed and heterogeneous geospatial data. However, most systems still focus only on quantitative evaluation of observa-tions. Qualitative aspects remain unformalized or are completely ignored. A combination of the two is required to effectively describe natural processes.
Agent researchers propose the use of soft-ware agents as logical abstractions to model and manage software components in large scale, dynamic and open environments (Jennings, 2001; Wijngaards, Overeinder, van Steen, & Brazier, 2002; Zambonelli, Jenning, Omicini, & Wooldridge, 2001). Software agents are autonomous software components that commu-

66 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
nicate at the knowledge level (Gaspari, 1998). A number of agent-based architectures have been proposed for the Sensor Web (Moodley & Simonis, 2006). However most approaches have limited support for the construction and evolution of the ontologies to support domain modeling, agent communication and reason-ing, and to represent the algorithms, scientific theories and beliefs that are routinely applied to sensor data. The authors are not aware of an integrated approach that incorporates both an agent architecture and a comprehensive semantic framework.
In previous work (Moodley & Simonis, 2006) we described an agent-based architecture for the Sensor Web, i.e., the Sensor Web Agent Platform (SWAP), and proposed initial compo-nents for the semantic infrastructure (Terhorst, Moodley, Simonis, Frost, McFerren, Roos, & van den Bergh, 2008). This paper describes how the specification of scientific theories and system modeling can be integrated into a comprehensive framework for representing all aspects of geospatial data (space, time, theme and uncertainty), the knowledge (theories and models) to interpret and analyse the data, and the system entities (agents, services and pro-cesses) that will manage and dynamically apply the knowledge to the data. Key features of the framework include a modular representation and reasoning system that eases conceptual modeling and allows for more flexible reasoning and the incorporation of Bayesian Networks to capture causal relations between sensor obser-vations and natural processes.
The rest of the paper is organised as follows. The next section is a review of related work. The SWAP framework is described afterward and an application on wildfire detection is used to illustrate the operation of the framework in the following section. Then an analysis and discussion of the framework and our conclu-sions are provided.
RELATED WORK
Key challenges being investigated by Sen-sor Web researchers include data integration; service discovery, reuse and composition, and semantic interoperability (Janowicz et al., 2010; Stock et al., 2011; Van Zyl, Simonis, & McFer-ren, 2009). Other aspects such as the handling of massive data sets, linked data approaches (Barnaghi & Presser, 2010; Kessler & Jano-wicz, 2010) as well as data originating from crowd-sourcing or civilian sources have also shifted into focus (Goodchild, 2007; Nagarjan et al., 2009). While it has been acknowledged that abstractions are required to bridge the gap between sensors and applications and to provide support for the rapid deployment of end user applications (Bröring et al., 2011; Corcho & Garcia-Castro, 2010), the most effective mecha-nism for modeling and managing application components remains an open issue.
Geospatial software agents have been recognized as important components of open and distributed geospatial systems (Sengupta & Sieber, 2007). Agent models offer a high level of disaggregation and address scale concerns at both a conceptual and functional level. A number of agent based Sensor Web architectures have been proposed (Moodley & Simonis, 2006). While these approaches are promising for single or even groups of organizations building distributed agent based applications, no explicit support is provided for creating and managing ontologies that are required for agent communi-cation and processing in an open Internet scale multi-agent system (Gaspari, 1998; Wijngaards et al., 2002; Zambonelli et al., 2001).
Ontologies are being widely investigated within the geospatial community to standardise, dynamically integrate and query complex earth observation data. Compton, Henson, Neuhaus, Lefort, and Sheth (2009) describe the range and expressive power of twelve sensor ontolo-gies, while Stock et al. (2011) provide a recent review of semantically aware systems from a

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 67
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
GEOSS context. Despite these efforts there are still many outstanding challenges. From a representational perspective, the added temporal and spatial dimension associated with geospatial data requires additional representation sup-port for modeling and formalising the domain (Agarwal, 2005; Balazinska et al., 2007). Linked data approaches use the Resource Description Framework (RDF) to markup streaming sen-sor data sources and propose different spatial and temporal extensions for SPARQL, the RDF query language (Le-Phuoc, Parreira, & Hauswirth, 2010; Rodriguez, McGrath, Liu, & Myers, 2009). More recently a spatial extension to SPARQL, GeoSPARQL (Battle & Kolas, in press), has been proposed as an OGC standard to provide a common way to represent and query geospatial data. Unel and Roman (2009), in their survey on stream reasoning, point out that current approaches are typically designed for static knowledge bases and often ignore rapidly changing data at both the terminologi-cal and assertion levels. There is a clear need for the design and implementation of reasoning methods for dynamic knowledge bases. While linked data approaches have significant benefits for representing and querying large, distributed and heterogeneous data sets, they are limited when it comes to integrating data or describing the inherent uncertainty associated with data (Bizer, Heath, & Berners-Lee, 2008).
The widely used Web Ontology Language (OWL) (Patel-Schneider & Horrocks, 2007) lacks core support for representing time, space and uncertainty (Shadbolt, Berners-Lee, & Hall, 2006) and for representing system entities such as agents, services and processes. A number of extensions have been proposed to incorporate uncertainty in OWL. Lightweight extensions, which introduce additional concepts in OWL to capture and represent Bayesian Networks, include OntoBayes (Yang & Calmet, 2005) and BayesOWL (Ding, Peng, & Pan, 2006). A more formal extension, PR-OWL (Costa & Laskey, 2006), aims to provide a first order Bayesian logic extension to OWL for represent-ing probabilistic logics. However, it is not fully compatible with OWL and does not provide a
formal bridge between OWL properties, classes and instances. Some of these limitations have been resolved in a new version, PR-OWL 2 (Laskey, Haberlin, Carvalho, & Costa, 2011). Non-Bayesian approaches include Fuzzy OWL (Stoilos, Simou, Stamou, & Kollias, 2006), a fuzzy logic extension to OWL that aims to capture imprecise and vague knowledge.
Besides formalisms that support machine representation and reasoning about geospatial data, Sensor Web ontologies must support conceptual modeling and be accessible and usable to a wide user community. One intui-tive approach to model geospatial entities is to follow the human cognition system. Humans store knowledge in three separate cognitive subsystems within the mind (Mennis, Peuquet, & Qian, 2000). The what system of knowledge operates by recognition, comparing evidence with a gradually accumulating store of known objects. The where system operates primarily by direct perception of scenes within the en-vironment, picking up invariants from the rich flow of sensory information. The when system operates through the detection of change over time in both stored object and place knowl-edge, as well as sensory information. Separate ontological representations for space, time and theme have been proposed (Perry, Hakimpour, & Sheth, 2006; Terhorst et al., 2008). However, trust in sensor data and model output must also be established. This requires well-formalized transparent models and the propagation of uncertainties involved at all steps of data ac-quisition and processing.
THE SWAP FRAMEWORK
Figure 1 shows the different ontologies provided by SWAP. Ontologies are split into two levels, a conceptual level and a technical level. Con-ceptual ontologies are used for modeling and representing observations and theories about the physical world. Technical ontologies are used for modeling and representing the software entities (agents) that will host and process these observations and theories.

68 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
The conceptual ontologies are based on creating separate subsystems as proposed by Mennis et al. (2000). SWAP defines four con-ceptual dimensions to represent and reason about knowledge, the traditional dimensions of theme, space and time, and introduces a fourth dimension for uncertainty. An ontology and an associated reasoner is provided for each dimen-sion. Domain ontologies for specific application domains are built by extending the swap-theme ontology. The eo-domain ontology extends the swap-theme ontology by adding concepts for building applications in the earth observation domain (Figure 1).
It currently references concepts from the SWEET ontologies (Raskin & Pan, 2005), an existing set of earth science ontologies. Ap-plication ontologies specify concepts that are used for specific applications, e.g., wildfire detection. Application specific concepts are de-
fined along one or more of the four dimensions. The four reasoners are applied independently as required to perform inferencing on the ap-plication ontology.
The Thematic Dimension
The thematic dimension provides a generic viewpoint for representing and reasoning about domain-specific concepts. The swap-theme ontology provides for the representation of observations and is based on the OGC’s model of observations and measurements (Cox, 2006). The Observation concept, defined in the swap-theme ontology, describes a single or a set of observations. Various thematic, spatial, tem-poral or uncertainty properties that are known may be specified for an observation (Figure 2). The different types of properties are defined in the respective conceptual ontologies, e.g., the-matic properties are defined in the swap-theme
Figure1.TheSWAPontologylevels

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 69
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
ontology and spatial properties are defined in the swap-space ontology.
Two thematic properties are defined in swap-theme, observesEntity describes the en-tity being observed (observedEntity), while observesProperty describes the property of the entity that is being measured (observedProp-erty). The eo-domain ontology (Figure 3) links observable properties, such as BrightnessTem-perature and DryBulbTemperature, from the NASA SWEET (Raskin & Pan, 2005) prop-erty ontology by making these properties a subclass of observedProperty. Geographical entities from the SWEET earth realm and SWEET phenomena ontologies are also linked by making these entities a subclass of obser-vedEntity, e.g., Air, Ocean, PlanetarySurface and Wind.
The schema for the thematic reasoner uses the eo-domain, swap-theme and the SWEET ontology. This allows the inference engine to infer relations with SWEET concepts not ex-plicitly referenced in the eo-domain ontology,
e.g., that BrightnessTemperature and DryBulb-Temperature are both subclasses of Tempera-ture.
The Spatial and Temporal Dimensions
The swap-space ontology provides concepts for representing and reasoning about topological spatial relationships between geometric objects in two-dimensional space. A part of the swap-space ontology is shown in Figure 4. Spatial entities include spatial reference systems, spatial projections, spatial resolution and location. Locations can be common descriptions such as a point coordinate or a bounding box, or well-defined spatial geometries such as a point, line or polygon.
A SpatialThing is defined as an entity that has a Location and the spatial reasoner deter-mines how two SpatialThings are related. Since OWL does not provide native support for spa-tial representation, a set of spatial rules were formulated using the Jena (http://jena.source-
Figure2.Representinganobservation
Figure3.Theeo-domainontologyandrepresentingadatasetofobservations

70 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
forge.net) rule-based OWL reasoner to represent the eight spatial operators specified by the Open GIS Consortium (OGC,1999). Figure 5 depicts the rule used to determine whether two Spa-tialThings intersect, where spc is the name space of the swap-space ontology and spatiallyInter-sects is a custom spatial builtin function.
A builtin for each of the eight spatial rela-tions is implemented in the spatial reasoner using the JTS topology suite (Vivid Solutions, Inc., n.d.; Davis, 2007). To determine if a spe-cific relation holds between two spatial things, the spatial reasoner first converts spatial things into JTS geometry objects and then calls the appropriate method on the geometry objects to perform the check.
The swap-time ontology incorporates the OWL-Time (Hobbs & Pan, 2004) ontology to represent and reason about the temporal aspects
of data (Figure 6). OWL-Time considers a tem-poral entity to be either a temporal instant or a temporal interval. As with the spatial reasoner an additional set of temporal rules, based on the COBRA temporal reasoner (Chen, 2004), specify temporal relations.
Figure 7 depicts two rules that represent the inside and before temporal relations where tme is the name space of the OWL-Time ontol-ogy.
The first rule stipulates that a time instant x is within a time interval y if the starting time of y is before x, and x is before the ending time of y. The second rule uses the lessThan builtin to determine whether the time value of a time instant x is before the time value of another time instant y. Since the standard Jena builtin comparison procedures, equals, lessThan and
Figure4.ThespatialontologyandrepresentingspatialpropertiesofobservationsinSWAP
Figure5.Aspatialrulefortheintersectsrelation

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 71
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
greaterThan support time values, no additional builtins were required.
The Uncertainty Dimension
Bayesian probability is well suited for dealing with uncertainty on the Sensor Web: where no complete theory is available; where it exists but might be too tedious or complex to incorporate all the required observations; or where all the necessary observation data is not available (Rus-sell & Norvig, 2003). A Bayesian network can be used to determine the probability of the oc-currence of a phenomenon, which is determined by evaluating measurements of some observed property of an observed entity. These observable events are then used to infer the probability of the occurrence of other events. Two types of discrete random variables are required:
• Observableeventvariables: Represents the occurrence of a symptom of a phenomenon and is a qualitative measure for an observa-
tion. The variable must specify the entity and the characteristic of the entity being observed together with the data property that holds the measurement value. The states are predefined numerical ranges, corresponding to qualitative descriptions. For example, wind speed is often used as an indication of the extent of a storm: from 50 to 89 km/h is a gale; 90 to 117 km/h is a storm and speeds greater than 118 km/h is indicative of a hurricane. Observation values can be used to populate observable event variables.
• Inferred event variables: Represents the occurrence of a phenomenon, e.g., a hur-ricane. A phenomenon is represented as a subclass of Phenomenon in the swap-theme ontology. When a phenomenon is detected, an instance of the appropriate class is created. These events are inferred from observable events or other inferred events. Even though these variables are
Figure6.RepresentingthetemporalpropertiesofaDataSet
Figure7.Temporalrulesfortheinsiderelation

72 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
intended for representing the occurrence of a phenomenon, they can be used to represent any event that is not easily or directly measurable.
The swap-uncertainty ontology, shown in Figure 8, extends the BayesOWL (Ding et al., 2006) ontology. The BayesOWL ontology proposes five classes to represent a Bayesian network, i.e., ProbObj, which could either be a CondProb or a PriorProb, Variable and State. A ProbObj has a probability value (hasProbValue) of some variable (hasVariable) being true. In BayesOWL a Variable represents whether an instance is a member (rdf:type) of the specified class (hasClass) with one of two states, either True or False. One extension to the BayesOWL ontology is the specialization of the State class to allow for user defined DiscreteStates. The DiscreteRangeState could be a numeric interval for numerical data type properties or a Single-NumericState for single numeric values.
The BayesianNetwork class was introduced to represent Bayesian networks (BN). Each BN instance contains multiple nodes where a node represents either an observation or inferred event variable. An observation event variable specifies the observation value (hasValuePro-
perty) for some observed property (observes-Property) of an observed entity (observesEn-tity). An inferred variable represents the occurrence of some phenomena (hasClass). The influencedBy property specifies which variables influence the state of the variable.
The uncertainty reasoner uses the Bayesian network tools in Java (BNJ) (http://bnj.source-forge.net) toolkit for internal representation and inferencing. The schema ontology containing the BayesianNetwork instance and observation instances from the knowledge base are provided to the inference engine. The BN instance is used to create a BNJ graph model. To facilitate mapping between variables and states between the ontology and the graph, the URIs of the variables and the states in the ontology are used for the variable and state names in the graph.
All observation instances are analysed to identify instances that match the observed property and observed entity of the observable event variables. The observation values are used to populate the states of the variables. Inferenc-ing is performed by the BNJ inference engine and states of inferred event variables are deter-mined. If the probability of an inferred event is higher than a predetermined threshold, then an instance of the corresponding phenomenon
Figure8.AfragmentoftheSWAPuncertaintyontology

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 73
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
is created in the knowledge base. In this way, the uncertainty reasoner dynamically populates user defined Bayesian networks with observable events, performs inferencing on these events and determines and records the occurrence of other (inferred) events.
The uncertainty ontology allows for the specification and dynamic application of mul-tiple Bayesian networks that capture expert belief based on cause and effect theories between observations and events. The other conceptual ontologies are used to ground the thematic, spatial and temporal characteristics of the ob-servations and inferred events. The reasoner is used to continuously monitor new observations to determine and record the probabilities of the occurrence of specific phenomena.
System Ontologies
Three technical ontologies, i.e., swap-data, swap-agent, and swap-task provide represen-tational support to describe the system entities. The swap-data ontology provides descriptions of different data structures that can be exchanged between agents. This includes coverage (image) and feature data as well as units of measure.
The swap-agent ontology provides support for representing an agent, the service it hosts and the interaction protocol required to invoke the service. It provides support for represent-ing the six different types of agents, shown in the SWAP abstract architecture in Figure 9 (Moodley & Simonis, 2006). Each agent type has a corresponding service description with a set of common attributes that capture
Figure9.TheSWAPabstractagentarchitecture
74 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
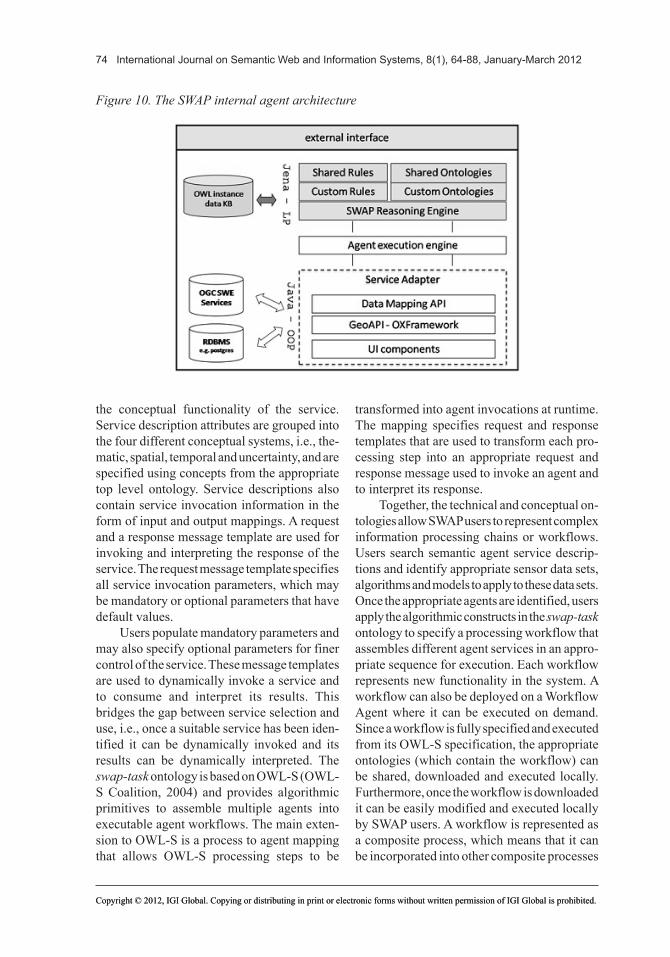
the conceptual functionality of the service. Service description attributes are grouped into the four different conceptual systems, i.e., the-matic, spatial, temporal and uncertainty, and are specified using concepts from the appropriate top level ontology. Service descriptions also contain service invocation information in the form of input and output mappings. A request and a response message template are used for invoking and interpreting the response of the service. The request message template specifies all service invocation parameters, which may be mandatory or optional parameters that have default values.
Users populate mandatory parameters and may also specify optional parameters for finer control of the service. These message templates are used to dynamically invoke a service and to consume and interpret its results. This bridges the gap between service selection and use, i.e., once a suitable service has been iden-tified it can be dynamically invoked and its results can be dynamically interpreted. The swap-task ontology is based on OWL-S (OWL-S Coalition, 2004) and provides algorithmic primitives to assemble multiple agents into executable agent workflows. The main exten-sion to OWL-S is a process to agent mapping that allows OWL-S processing steps to be
transformed into agent invocations at runtime. The mapping specifies request and response templates that are used to transform each pro-cessing step into an appropriate request and response message used to invoke an agent and to interpret its response.
Together, the technical and conceptual on-tologies allow SWAP users to represent complex information processing chains or workflows. Users search semantic agent service descrip-tions and identify appropriate sensor data sets, algorithms and models to apply to these data sets. Once the appropriate agents are identified, users apply the algorithmic constructs in the swap-task ontology to specify a processing workflow that assembles different agent services in an appro-priate sequence for execution. Each workflow represents new functionality in the system. A workflow can also be deployed on a Workflow Agent where it can be executed on demand. Since a workflow is fully specified and executed from its OWL-S specification, the appropriate ontologies (which contain the workflow) can be shared, downloaded and executed locally. Furthermore, once the workflow is downloaded it can be easily modified and executed locally by SWAP users. A workflow is represented as a composite process, which means that it can be incorporated into other composite processes
Figure10.TheSWAPinternalagentarchitecture

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 75
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
(workflows). This allows for reuse of existing workflows within other workflows and for cre-ating and managing large and complex nested workflows. Currently, workflows are created and modified manually via an ontology editor. However, given that the semantics of both the conceptual and the technical aspects of each service are specified in the service description, this provides a sound foundation for automating workflow composition.
The Internal Agent Architecture
Figure 10 shows the internal architecture of an agent. An agent uses the shared ontologies and shared rules to interpret and reason about in-coming messages. Custom rules and ontologies, which encode additional knowledge required for its internal operation, may also be specified. This allows for different agents to respond differently to request messages as determined by their custom ontologies and custom rules.
The Java based Jena platform is used to represent and execute rules. Jena provides a rule-based implementation of the OWL lite subset of OWL full. These rules can be ex-tended to specify additional domain or applica-tion specific rules. In this way, Jena bridges the gap between ontologies and rule-based systems. Jena also supports procedural attachments, i.e., rules may refer to external functions.
The reasoning engine combines the themat-ic, spatial, temporal and uncertainty reasoner. Each agent must be able to receive, process, and respond to incoming requests and information. The reasoners are applied independently as required to perform inferencing. Each reasoner works independently on the knowledge base and execution is performed sequentially. Consider a query for observations to a Sensor Agent that specifies thematic, spatial and temporal constraints. The thematic reasoner is executed and returns observations that satisfy the thematic constraints. The spatial and temporal reason-ers are then executed on these observations respectively and those observations that satisfy both the spatial and temporal constraints are returned. The Bayesian reasoner is currently
only used at the Application Agent to analyse incoming observations and to create instances of phenomena with their associated probabilities. Having four separate representation and reason-ing systems increases the flexibility and speed of the reasoning process. Since the reasoners operate independently, each reasoner can be customised, extended or exchanged without affecting the others. The different reasoners currently use different inferencing engines: the thematic reasoner uses a Pellet reasoner; the temporal and spatial reasoners use a Jena rule-based engine; and the uncertainty reasoner uses a Bayesian inference engine.
The MASII platform (Moodley & Kinyua, 2006) is used for agent execution and deploy-ment. The agent execution engine provides the runtime environment for an agent. It implements a communication infrastructure that provides a transport layer for message passing, message handlers to handle different messages and a message queue that redirects incoming mes-sages to the appropriate message handlers. These message handlers use the reasoning engine to interpret, reason about, and respond to these messages.
Various initiatives are underway in the geoinformatics community to provide open source development libraries to serve, access, process and visualise sensor data. The SWAP architecture attempts to leverage and reuse these libraries where possible. SWAP uses a service adapter to incorporate functionality from exist-ing Java based GIS libraries. Adapters uses a data mapping API to allow agent developers to in-corporate functionality from existing Java based GIS libraries. The data mapping API, shown in Table 1, transforms spatial and temporal ontol-ogy data instances into corresponding OpenGIS data structures. For example, the Geometry class in the JTS Java libraries naturally maps to the Geometry concept defined in the swap-space ontology. The initial mappings support access to the GeoAPI (http://geoapi.sourceforge.net), 52 North’s OXFramework (http://52north.org), and the Java Topology Suite (JTS) (Davis, 2007) and are shown in Table 1.

76 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
For each mapping, the ontology concept, the corresponding Java representation class and the library to which the classes belong are shown. One challenge encountered while de-veloping the mapping is how to map the the-matic properties used in the ontologies to ob-servations in a Sensor Observation Service. The current approach is to match the name of the ObservedProperty instance in the agent’s knowledge base to the description of the observ-able property (observedProperty) field of the offerings provided by the Sensor Observation Service.
The data mapping API is used within an agent to convert incoming ontology instance data to OpenGIS Java data objects. These objects can then be processed using the functionality provided within OpenGIS Java libraries. Once the processing is completed, the data mapping API is used to convert the results into ontol-ogy instances that can be exchanged with other agents.
A key feature of the internal agent architec-ture is a mechanism that bridges the gap between the declarative programming approach used for programming ontology and agent systems and the imperative approach used in object oriented
development. In this regard the data mapping API allows agent developers to incorporate and integrate existing programming libraries, sensor data stores and GUI components available to the geoinformatics community.
MODELING AND DETECTING WILDFIRE IN SWAP
The Advanced Fire Information System (AFIS) is a near real-time satellite-based fire monitor-ing system in Africa (Frost & Vosloo, 2006; Terhorst et al., 2008). The current system uses OGC Sensor Web Enablement (SWE) (Botts, Percivall, Reed, & Davidson, 2008) services to analyse brightness temperature images from the SEVIRI sensor on the Meteostat Second Generation (MSG) satellite and MODIS sen-sors aboard the TERRA and AQUA satellites. The image values serve as an indication of the temperature on specific locations of the earth’s surface. Abnormally high temperature values are used as an indicator of a wildfire.
A wildfire detection application, based on AFIS, was designed and implemented on SWAP. The SWAP abstract architecture (Fig-ure 9) provides three levels of abstractions to
Table1.MappingsbetweenSWAPontologystructuresandOpenGISJavaclassstructures
GeoAPI
Ontology Concept/Representation Interface/class
Swap-time TemporalThing ITime
Swap-time InstantThing TimePosition
Swap-time IntervalThing TimePeriod
Swap-space BoundingBox IBoundingBox
JTS
Swap-space Geometry Geometry
Swap-space PointCoordinate Coordinate
Swap-space List of PointCoordinates CoordinateList
OXFramework
Swap-space List of SingleValues with spatial extent Collection<OXFFeature>
Java
Swap-data ImageFileValue File

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 77
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
facilitate data analysis and information extrac-tion. The abstractions guided the identification of the different data transformations, shown in Figure 11, required for detecting wildfires. Brightness temperature images are retrieved at the Sensor Layer, thermal hotspots are identi-fied at the Knowledge Layer, and are used to detect and manage to potential wildfires at the Application Layer.
Concepts from the SWAP top level and the eo-domain ontologies (Figure 1) were ex-tended to create a wildfire application ontology. A fragment of this ontology is shown in Figure 12.
The following classes are used to represent the concepts required for wildfire detection:
• MSGThermalValue instances represent individual values from the MSG bright-ness temperature (BT) images. It has an instance of BrightnessTemperature (ref-erenced from the SWEET ontology) as its observed property and an instance of PlanetarySurface as its ObservedEntity.
• MSGThermalHotspot instances are MS-GThermalValue instances that have abnor-mally high BT values. Hotspot instances
that are also instances of MSGThermalVal-ue are defined as MSGThermalHotspots.
• Wildfire instances are those MSGTherm-alHotspot instances that are deemed to be wildfires.
Figure 13 shows the agents that are required at each layer to provide or transform data. At the Sensor Layer, the MSG Sensor agent offers brightness temperature image data as georef-erenced GeoTiff images. The agent executes the thematic, spatial and temporal reasoners in sequence to identify and return images that satisfy the query constraints. The agent uses a data adaptor to redirect queries to either a Sensor Observation Service or a relational database. The retrieved data is returned to the requestor, marked up with appropriate thematic, spatial and temporal attributes from the SWAP ontologies.
At the Knowledge Layer, a Tool Agent detects pixels with spatial anomalies from georeferenced raster data and outputs these pixel values with their real world coordinates. In this case pixels with abnormally high values relative to neighbouring pixels (temperature hotspots) are detected. A workflow agent or-chestrates the data retrieval and processing using an OWL-S workflow. The Fire Spread
Figure11.Datatransformationsforextractingwildfiresfromsatellitedata

78 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
Agent uses current wildfire observations to predict the probability of the spread of the wildfire towards a specified location. The Fire Detection Application Agent receives and stores the temperature hotspots from the Workflow Agent and uses these hotspots to indicate pos-sible wildfires. It also retrieves wildfire spread predictions for current wildfires from the Fire Spread Modeling Agent. The Fire Detection User Agent registers alert requests with the Fire Detection Application Agent, by providing a filter of features or areas of interest. The ap-plication agent continuously applies the the-matic and spatial reasoner in sequence on each alert request to identify wildfires in the specified areas and responds with the matching wildfires and spread predictions.
Dealing with Uncertainty in Wildfire Detection
Uncertainty is encountered at each stage of the detection process (Figure 11) and should be captured, propagated and included in the wildfire alert. Brightness temperature readings at the Sensor Layer have a degree of inaccuracy resulting from accuracy and precision imperfec-tions of the observation device. Observations incorporate three time elements, i.e., the time
when the observation was performed, the time the result is assigned, and the time the event occurred. A number of factors impact on spatial accuracy including the orthorectification pro-cess, measurements taken from a moving satel-lite platform, and arithmetic precision caused by the number of digits used to store the spatial coordinates of the observation. Algorithms used in processing chains that are applied to observa-tions at the Knowledge Layer inherently add a degree of inaccuracy. In this case the accuracy of the hotspot detection process depends on the effectiveness of the contextual algorithm. At the Application Layer, hotspots are used as a basis for wildfires. However, not every hotspot is a wildfire. Hotspots caused by power stations and heavy industry and naturally occurring tempera-ture anomalies, e.g., volcanos and geyers, must be filtered. Uncertainty is multidimensional by nature, can be difficult to be characterized and may not even be quantifiable.
A Bayesian network, shown in Figure 14, was designed using the swap-uncertainty ontol-ogy, to interrogate brightness temperature values and to determine the probability of wildfires.
An instance of an MSGThermalValue, which represents a pixel value in a MSG bright-ness temperature image, is shown in Figure 15. If an MSGThermalValue instance exceeds 315
Figure12.Thematicconceptsforwildfiredetection

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 79
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
kelvin and is significantly higher than the neighbouring values it is classified as a thermal hotspot (MSGThermalHotspot). The values of the hasSpatialVariance and hasNumericValue properties are evaluated to determine whether an MSGThermalValue instance is a MSGTher-malHotspot. The occurrence of a thermal hotspot is an indication of a potential wildfire at that location, resulting in some hotspots being clas-sified as wildfires.
The Bayesian network (Figure 14) for-malises these cause and effect relations. The network consists of four variables. MSG_thm_value_var and MSG_thm_variance_var repre-sent the value and the variance of a MSG brightness temperature respectively, while is_hotspot_var and is_wildfire_var represent the occurrence of a hotspot and a wildfire. The directed arcs between variables represent the cause and effect relations between events in the
real world. Therefore a wildfire causes a ther-mal hotspot, a thermal hotspot in turn causes a high thermal value and a high spatial variance relative to its neighbours.
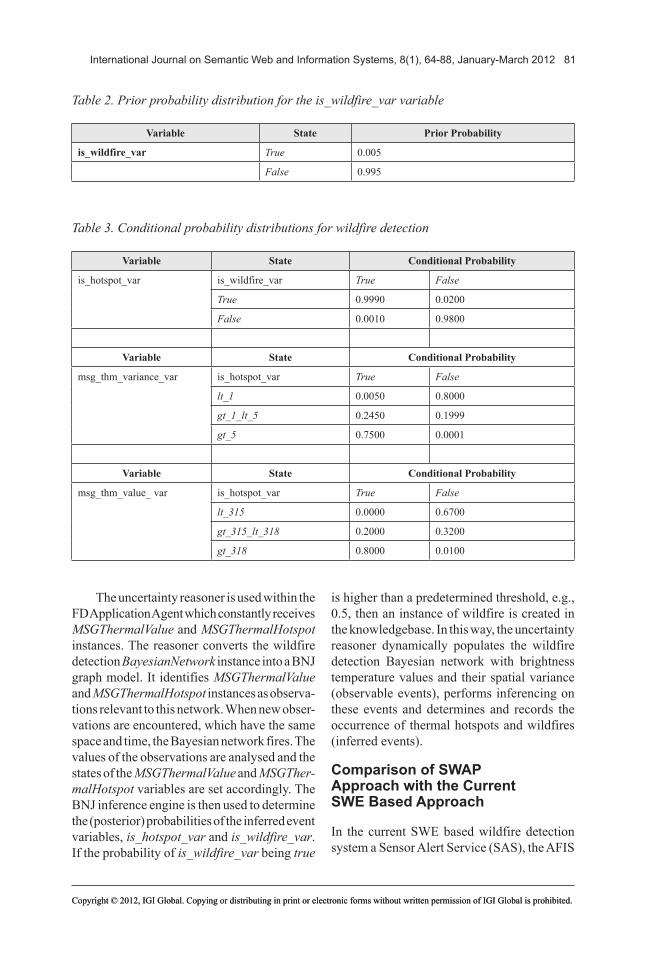
To qualify these relations a joint conditional probability table must be specified. Each vari-able must have either a prior or conditional probability distribution. The prior probability of an event is the belief that an event is oc-curring if there is no information about other events in the domain. It must be specified for all independent variables, i.e., those that are not influenced by any other variables. Since is_wildfire_var is not influenced by any other variables, prior probabilities must be provided for each of its states. Table 2 shows mock values, representing our belief, for the prior probabilities for is_wildfire_var. Real belief values can be determined by domain experts and remote sensing specialist who have expert
Figure13.Architectureofawildfiredetectionapplication

80 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
knowledge of the wildfire detection process, and can be validated using historical brightness temperature readings and wildfires.
Since MSG_thm_value_var, MSG_thm_variance_var and is_hotspot_var are influenced by the states of other variables, conditional probabilities distributions must be provided for all possible combinations of its states and the states of the influencing variables. Table 3 shows mock values for the conditional probability distributions for these variables. The columns under conditional probability contain the states of the influencing variable. The first value for is_hotspot_var, 0.9990, is the probability that
is_hotspot_var is True given that is_wildfire_var is True. Consider the distribution for MSG_thm_variance_var. Since it is influenced by is_hotspot_var, a column is provided for each of the states of is_hotspot_var (true or false) and a row for each of the states of MSG_thm_variance_var (lt_1, gt_1_lt_5 and gt_5). This results in conditional probability values for all possible states of the two variables
The Bayesian network and probability distributions are stored in the ontology as an instance of BayesianNetwork using concepts from the swap-uncertainty ontology.
Figure14.ABayesiannetworkforwildfiredetection
Figure15.RepresentinganMSGbrightnesstemperaturemeasurement
International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 81
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
The uncertainty reasoner is used within the FD Application Agent which constantly receives MSGThermalValue and MSGThermalHotspot instances. The reasoner converts the wildfire detection BayesianNetwork instance into a BNJ graph model. It identifies MSGThermalValue and MSGThermalHotspot instances as observa-tions relevant to this network. When new obser-vations are encountered, which have the same space and time, the Bayesian network fires. The values of the observations are analysed and the states of the MSGThermalValue and MSGTher-malHotspot variables are set accordingly. The BNJ inference engine is then used to determine the (posterior) probabilities of the inferred event variables, is_hotspot_var and is_wildfire_var. If the probability of is_wildfire_var being true
is higher than a predetermined threshold, e.g., 0.5, then an instance of wildfire is created in the knowledgebase. In this way, the uncertainty reasoner dynamically populates the wildfire detection Bayesian network with brightness temperature values and their spatial variance (observable events), performs inferencing on these events and determines and records the occurrence of thermal hotspots and wildfires (inferred events).
Comparison of SWAP Approach with the Current SWE Based Approach
In the current SWE based wildfire detection system a Sensor Alert Service (SAS), the AFIS
Table2.Priorprobabilitydistributionfortheis_wildfire_varvariable
Variable State Prior Probability
is_wildfire_var True 0.005
False 0.995
Table3.Conditionalprobabilitydistributionsforwildfiredetection
Variable State Conditional Probability
is_hotspot_var is_wildfire_var True False
True 0.9990 0.0200
False 0.0010 0.9800
Variable State Conditional Probability
msg_thm_variance_var is_hotspot_var True False
lt_1 0.0050 0.8000
gt_1_lt_5 0.2450 0.1999
gt_5 0.7500 0.0001
Variable State Conditional Probability
msg_thm_value_ var is_hotspot_var True False
lt_315 0.0000 0.6700
gt_315_lt_318 0.2000 0.3200
gt_318 0.8000 0.0100

82 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
Fire Alert service (FAS), extracts and analyses hotspots from the MODIS and SEVIRI satellite image data to produce wildfire alerts (Terhorst et al., 2008). The FAS uses two separate image processing chains, one dedicated to MODIS imagery, the other dedicated to SEVIRI imagery. The hotspot detection process is hidden behind the SAS interface. Only by reading the system documentation would developers discover the algorithm and the sensor data set that was used to produce the data. The SWAP approach exposes the different application components, the data retrieval (Sensor Agents), the data processing algorithms (Tool Agents) and the image processing chains (Workflow Agents) as separate software components. This eases modification and extension of the application. For example a weather sensor agent can be introduced to provide weather data to the fire spread modeling agent. Minor improvements to the hotspot extraction algorithm can be deployed by modifying only the CA Tool Agent, or intro-ducing additional Tool Agents. The current CA Tool Agent can be used for other applications that involve the detection of spatial anomalies, e.g., detecting temperature lowspots to detect ice clouds. The fire alerts produced by the current system lack explicit semantics, which affect their interpretation and use by end users. Even though a confidence value is attached to fire alerts, there is no inherent information on how this is derived. In the SWAP approach users can access the Bayesian network that generated the probability value associated with a fire alert, and semantic service descriptions of the processing chain including the individual processing steps that generated the alert. Users can also access the SWAP ontologies to interpret concepts used in these service descriptions.
The case study application illustrates important features of the SWAP framework. It shows how the abstract architecture can be used to analyse and model information extraction processes, and design and implement modular and reusable application components (agents) for a Sensor Web application. It also illustrates how a cause and effect theory can be formally captured and dynamically applied to incom-
ing observations. The uncertainty reasoner dynamically identifies relevant observations, fires when these observations are encountered and determines the probability of the occurrence of a natural phenomenon. Users are exposed not only to the observations, but also the theory (the Bayesian network and probability distributions) that was used to detect the phenomenon.
ANALYSIS AND DISCUSSION
The SWE based approach has a limited meth-odology for developing complex application and provides weak semantics for service descriptions. This limits the degree of reuse and maintenance and changeability of the underlying components of a SWE service. New services must be built from scratch even if they incorporate similar data sources and algorithms used within existing services. This duplication of efforts is compounded as the number and complexity of services increases. Since a limited methodology is provided for developing SWE end-user applications, services and applications that use these services will be developed on a custom and ad hoc basis and often must be manually upgraded to incorporate new services or changes to existing services. In SWE based systems complex application components, e.g., sensor data providers and data processing algorithms may be hidden behind the SAS interface. For simple, static and closed applications, comprising of one data provider, a single data processing step that and a well defined user community that will not change, the SWE approach will work. However, it has limitations in terms of the changeability and maintainability for more complex and open applications that involve multiple data providers, algorithms and user communities that change over time. Furthermore, SWE applications provide little information about the origin and quality of alerts and users have difficulty in interpreting and comparing alerts from multiple applications. Another inherent limitation of SWE is the limitation on distrib-uted processing. The incorporation of complex

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 83
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
data processing within a SAS interface limits potential scalability and performance gains of a distributed approach. SWAP Workflow Agents control the retrieving, processing and the flow of data over time. The processing load is distributed over multiple agents, supporting both asynchronous and synchronous processing. This facilitates the detection and resolution of processing bottlenecks in the system.
Despite these limitations SWE has been adopted as a standard way to publish and retrieve data in the geospatial community. Even though semantic and agent based architectures provide significant benefits in an open and dynamic Sensor Web moving these technologies out of research labs, and wide spread adoption and use in real world applications remains challenging.
Compatibility with standards and technolo-gies is essential. A key feature of the internal agent architecture is a mechanism that bridges the gap between the declarative programming approach used for programming ontology and agent systems and the imperative approach used in object oriented development. The data mapping API allows for agents to retrieve and enrich observation data from OGC services. Agent developers can incorporate and inte-grate existing programming libraries and GUI
components available to the geoinformatics community to access, process and visualise sensor data.
Each SWAP agent contributes towards an aspect of knowledge and system dynamism. Table 4 describes the knowledge and system dynamism supported by the different agents.
The reasoners provide a semantic founda-tion for combining thematic, spatial and tem-poral reasoning. For example, a task for detect-ing wildfires first triggers the thematic reasoner, which links wildfires to temperature hotspots. The temporal reasoner analyzes if a hotspot has been detected previously in the area, possibly a burnt area, which reduces the likelihood of a new fire in the area. The spatial reasoner then analyzes neighboring fires to detect the danger of fire merging situations.
Conceptual Modeling
The framework aims to provide an integrated and lightweight modeling framework to assist the earth observation community to capture and share domain knowledge. From a model-ing perspective having separate subsystems for each of the modeling dimensions is more intuitive to human modelers since it is similar to the human cognitive system (Mennis et al.,
Table4.Knowledgeandsystemdynamismbyagenttype
Agent Knowledge dynamism System dynamism
Sensor Agent Thematic-temporal-spatial reasoning over semantic descriptions of data sets aids in data discovery and reuse
Modify or add new data sources, e.g., SOS, spatial database
Tool Agent Thematic-temporal-spatial reasoning over algorithm descriptions, aids in discovery and reuse of algorithms
Modify or add new data processing or transformation algorithms
Workflow Agent Semantic workflow descriptions aid in constructing complex processing chains and thematic-temporal-spatial reasoning over workflow descriptions, and discovery and reuse of data analysis results
Construct new or modify existing data pro-cessing chains to utilize new agent services
Application Agent Incorporates expert knowledge to detect com-plex natural phenomena, thematic-temporal-spatial-uncertainty reasoning used to detect real world phenomena and aids in discovery of these phenomena
Construct new, modify and extend existing applications

84 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
2000). By combining concepts from the dif-ferent ontologies modelers can create more consistent descriptions of complex geospatial entities, e.g., observable and inferred events. Modelers can more easily discover and correct logical inconsistencies in each of the different dimensions. The conceptual ontologies incor-porate existing lightweight representations for each of the dimensions and showed how these representations could be integrated to create a holistic modeling framework. Our stance is that lightweight formalisms are simpler, more accessible and usable to a larger community than heavyweight and complex formalisms.
Modular Representation and Reasoning Subsystems
Developments in formal representation lan-guages for ontologies are generally evolving separately along each of the four conceptual dimensions. OWL is intended for domain (the-matic) modeling and does not provide support for time, space and uncertainty. Spatial, tem-poral and probabilistic extensions to OWL are evolving separately from OWL. Any integrated representation should support a migration path to new developments in each conceptual di-mension.
Development of the SWAP ontologies started in 2005. The choice of ontology to use in each conceptual dimension was determined by the ontologies that were available at that time. Ontologies were selected based on: their ease of use and adoption, alignment to OGC conceptual data models, lightweight and com-patibility with OWL. Complex formalisms which were not fully compatible with OWL were avoided. An advantage of having independent representation and reasoning subsystems is that one subsystem can be migrated or mapped to a new system with little modification to the other subsystems. This allows for the evolution of thematic, spatial, temporal and uncertainty ontologies, while still allowing integration between the representations.
A preliminary analysis of recent lightweight ontologies, i.e., GeoSPARQL and the SSN on-
tology, in terms of their compatibility with the SWAP ontologies was undertaken. Conceptu-ally, there are many similarities between the SWAP spatial ontology and the GeoSPARQL ontology (Battle & Kolas, in press). SWAP uses SpatialThing, which is similar to SpatialObject in the GeoSPARQL ontology. Both reference implementations are based on Jena rules. How-ever, SWAP ontology only supports the spatial relations from the OGC’s Simple Features, while GeoSPARQL also supports Egenhofer’s 9-intersection model and RCC8. Given the conceptual similarities a preliminary analysis shows that migration of the current spatial on-tology and reasoning system to GeoSPARQL is possible. The SSN ontology (Lefort et al., 2011) has some similarities to the SWAP thematic ontology from the observation perspective. The Observation, PropertyandFeatureOfInterest concepts from SSN are similar to the Obser-vation, ObservedProperty ObservedEntity concepts in swap-theme. The SSN ontology is more comprehensive than swap-theme as it also provides concepts to describe the sensors and the sensing procedure. A preliminary analysis shows that there is sufficient overlap between the swap-theme ontology and the SSN ontology to investigate a migration.
The modular design also increases the flexibility of the reasoning process. Differ-ent reasoners can be selected for each of the dimensions. Each reasoner can be modified or replaced without affecting other reasoners. Logical inconsistencies in one dimension can be more easily detected and fixed without impact-ing on other dimensions. However, even though the reasoners run independently they act on and modify a shared knowledge base. Even though we have not detected any unintended conse-quences in our investigations, further study is required on the effects of applying independent reasoners on a shared knowledgebase and how additional reasoners can be added to create an ensemble of reasoners. The approach also has the potential to deal with intractability of the reasoning process. In our preliminary testing we noticed that inference times were shortened by using separate reasoners, but this requires

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 85
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
further investigation. Further research is also required to integrate simulation and predic-tion models and techniques, including pattern recognition and classification techniques such as neural networks and support vector ma-chines, stochastic and mathematic models. The framework shows how to model simple types of events, i.e., events that occur at a specific point in time, within a time interval or in a specific sequence. More complex situations, e.g., events that are based on the occurrence of previous events, such as shrinking frequen-cies or complex temporal topologies and event constellations (e.g., event a occurs if event b happens before event c but after event d) require further investigation.
Representing and Reasoning about Uncertainty
Domain experts currently create products based on sensor data to allow decision mak-ers to understand natural process or identify phenomena or events of interest in the physi-cal world. Typically the expertise, theoretical models and workflows used are not easily accessible. The framework described herein proposes an approach to formalize and expose expert knowledge as independent and explicit entities in a worldwide Sensor Web. It provides a mechanism using Bayesian networks for domain experts to formalise cause and effect relations between specific sensor observations (observed events) and inferred events or natural processes that are of interest to end users. The incorporation of uncertainty allows end users to better understand the process and quality of information generated within the Sensor Web. The nature and availability of sensor data, the accuracy and completeness of the theory that underpins the choice, and the sequence of the processing steps may contribute an additional element of uncertainty. The approach bridges the gap between sensor data, domain experts and decision makers. It allows for incorporating and propagating uncertainty associated from sensor inaccuracy, data integration, data analysis and information extraction. Bayesian networks can
be continuously applied to incoming observa-tions in real-time to produce information that can be easily consumed by end users. Users have direct access to the model that produces the information on which their decisions are based. This opens the expertise and underpin-ning theories to scrutiny by decision makers. Since the model forms an independent entity in the system, it can be directly modified and refined in most cases without any reengineering of other components in the system
Uncertainty, in particular the combination of multiple uncertainties produced by observ-ing or deriving data on the three dimensions space, time, and theme, has been tackled to some extent in this paper, but there are several avenues that require further investigation. The framework allows for capturing the uncertainty associated with the occurrence of each event and uncertainties related to causal relations between events. However, recorded events have separate uncertainties for time, space and theme. Our approach aggregates these uncertainties into one probability belief value and does not allow for the propagation of component probability values. Users are unaware of the weighting of each of the component uncertainties contributed to the uncertainty value. In cases where one component uncertainty is significantly more important than the others, decision making will be difficult. The current Bayesian model works orthogonal to the other reasoners, and allows only for capturing basic Bayesian networks. It cannot capture and reason about relations between past, current and future events and events occurring at different locations.
CONCLUSION
This paper proposes a modular and flexible con-ceptual knowledge representation and reasoning framework for the Sensor Web. It shows how the framework can be used to capture, share and apply complex causal theories between sensor observations and natural processes. A key feature of the framework is a mechanism to move seamlessly from the declarative para-

86 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
digm of the ontology and agent community to the imperative programming paradigm of the geospatial community. While software agents and ontologies have been shown to be effec-tive for managing various aspects of system and knowledge dynamism on the Sensor Web, further research is required on how to move these technologies out of research labs and into the main stream geospatial software develop-ment community.
REFERENCES
Agarwal, P. (2005). Ontological considerations in GI science. International Journal of Geo-graphical Information Science, 19(5), 501–535. doi:10.1080/13658810500032321
Balazinska, M., Deshpande, A., Franklin, M. J., Gibbons, P. B., Gray, J., & Hansen, M. (2007). Data management in the worldwide Sensor Web. IEEEPervasive Computing, 6(2), 30–40. doi:10.1109/MPRV.2007.27
Barnaghi, P., & Presser, M. (2010). Publishing linked sensor data. In Proceedingsofthe3rdInternationalWorkshoponSemanticSensorNetworks, Shanghai, China.
Battle, R., & Kolas, D. (in press). GeoSPARQL: Enabling a geospatial semantic Web. SemanticWeb–Interoperability,Usability. Applicability.
Bizer, T. H., Heath, T., & Berners-Lee, T. (2009). Linked data - The story so far. InternationalJournalon SemanticWeb and Information Systems, 5(3), 1–22. doi:10.4018/jswis.2009081901
Botts, M., Percivall, G., Reed, C., & Davidson, J. (2008). OGC Sensor Web enablement: Overview and high level architecture. In S. Nittel, A. Labrinidis, & A. Stefanidis (Eds.), ProceedingsoftheSecondInternationalConferenceonGeosensorNetworks (LNCS 4540, pp. 175-190).
Bröring, A., Echterhoff, J., Jirka, S., Simonis, I., Everding, T., & Stasch, C. (2011). New generation sensor web enablement. Sensors, 11(3), 2652–2699. doi:10.3390/s110302652
Chen, H. L. (2004). Anintelligentbrokerarchitectureforpervasivecontext-awaresystems (Unpublished doctoral dissertation). University of Maryland, Baltimore, MD.
Coalition, O. W. L.-S. (2004). OWL-S: Semanticmarkup for Web services. Retrieved October 22, 2011, from http://www.w3.org/Submission/OWL-S/
Compton, M., Henson, C., Neuhaus, H., Lefort, L., & Sheth, A. (2009). A survey of the semantic specification of sensors. In Proceedingsofthe2ndInternationalWorkshop on Semantic SensorNet-works, Washington, DC.
Corcho, O., & Garcia-Castro, R. (2010). Five chal-lenges for the semantic Sensor Web. SemanticWeb, 1(1-2), 121–125.
Costa, P. C. G., & Laskey, K. B. (2006). PR-OWL: A framework for probabilistic ontologies. In Proceed-ingsoftheFourthInternationalConferenceonFor-malOntologyinInformationSystems (pp. 237-249).
Cox, S. (2006). Observations and measurements (OGC 05-087r3 Version 0.13.0). Retrieved Febru-ary 29, 2012, from http://www.opengeospatial.org/standards/om
Davis, M. (2007). SecretsoftheJTSTopologySuite. Paper presented at the Free and Open Source Software for Geospatial, Victoria, BC, Canada.
Ding, Z., Peng, Y., & Pan, R. (2006). BayesOWL: Uncertainty modeling in semantic web ontologies. In Ma, Z. (Ed.), SoftcomputinginontologiesandsemanticWeb (pp. 3–29). Berlin, Germany: Springer-Verlag. doi:10.1007/978-3-540-33473-6_1
Frost, P., & Vosloo, H. (2006). Providing satellite-based early warnings of fires to reduce fire flashovers on transmission lines. ESIAfrica, 2, 48–51.
Gaspari, M. (1998). Concurrency and knowledge-level communication in agent languages. ArtificialIntelligence, 105(1-2), 1–45. doi:10.1016/S0004-3702(98)00080-0
Gibbons, P. B., Karp, B., Ke, Y., Nath, S., & Seshan, S. (2003). IrisNet: An architecture for a worldwide Sensor Web. IEEE Pervasive Computing, 2(4), 22–33. doi:10.1109/MPRV.2003.1251166
Goodchild, M. F. (2007). Citizens as sensors: The world of volunteered geography. GeoJournal, 69, 211–221. doi:10.1007/s10708-007-9111-y
Hobbs, J. R., & Pan, F. (2004). An ontology of time for the semantic web. ACMTransactionsonAsianLanguage Information Processing, 3(1), 66–85. doi:10.1145/1017068.1017073

International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012 87
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
Janowicz, K., Schade, S., Bröring, A., Keßler, C., Maué, P., & Stasch, C. (2010). Semantic enable-ment for spatial data infrastructures. Transactionsin GIS, 14(2), 111–129. doi:10.1111/j.1467-9671.2010.01186.x
Jennings, N. R. (2001). An agent-based ap-proach for building complex software systems. Communications of the ACM, 44(4), 35–41. doi:10.1145/367211.367250
Kessler, C., & Janowicz, K. (2010). Linking sensor data - Why, to what, and how? In Proceedingsofthe3rdInternationalWorkshoponSemanticSensorNetworks, Shanghai, China.
Laskey, K. B., Haberlin, R., Carvalho, R. N., & Costa, P. C. G. (2011). PR-OWL 2 case study: A maritime domain probabilistic ontology. In Proceedingsofthe6thInternationalConferenceonSemanticTechnolo-giesforIntelligence,Defense,andSecurity, Fairfax, VA (pp. 76-83).
Le-Phuoc, D. L., Parreira, J. X., & Hauswirth, M. (2010). Challenges in linked stream data processing: A position paper. In Proceedingsofthe3rdInter-nationalWorkshoponSemanticSensorNetworks, Shanghai, China.
Lefort, L., Henson, C., Taylor, K., Barnaghi, P., Compton, M., & Corcho, O. …Page, K. (2011). Se-manticSensorNetworkXGFinalReport. Retrieved February 27, 2012, from http://www.w3.org/2005/Incubator/ssn/XGR-ssn/
Liang, S. H. L., Croitoru, A., & Tao, C. V. (2005). A distributed geospatial infrastructure for sensor Web. Computers&Geosciences, 31(2), 221–231. doi:10.1016/j.cageo.2004.06.014
Mennis, J., Peuquet, D., & Qian, L. (2000). A concep-tual framework for incorporating cognitive principles into geographical database representation. Interna-tionalJournalofGeographicalInformationScience, 1414(6), 501–520. doi:10.1080/136588100415710
Moodley, D., & Kinyua, J. D. M. (2006). Towards a multi-agent infrastructure for distributed Internet applications. In Proceedings of the 8th AnnualConferenceonWWWApplications, Bloemfontein, South Africa.
Moodley, D., & Simonis, I. (2006). A new archi-tecture for the sensor web: The SWAP-framework. In Proceedings of the Semantic SensorNetworksWorkshop, Athens, GA.
Nagarajan, M., Gomadam, K., Sheth, A., Ranabahu, A., Mutharaju, R., & Jadhav, A. (2009). Spatio-temporal-thematic analysis of citizen sensor data: Challenges and experiences. In G. Vossen, D. D. Long, & J. X. Yu (Eds.), Proceedingsofthe10thIn-ternationalConferenceofWebSystemsEngineering (LNCS 5802, pp. 539-553).
Open, G. I. S. Consortium (OGC). (1999). OpenGISsimplefeaturesspecificationforSQLRevision1.1 (Tech. Rep. OpenGIS Project Document 99-049). Retrieved February 28, 2012, from http://portal.opengeospatial.org/files/?artifact_id=829
Patel-Schneider, P. F., & Horrocks, I. (2007). OWL1.1:Web ontology language overview. Retrieved February 28, 2012, from http://www.w3.org/Submis-sion/owl11-overview/
Perry, M., Hakimpour, F., & Sheth, A. (2006). Ana-lyzing theme, space, and time: An ontology-based approach. In Proceedingsofthe14thAnnualACMInternationalSymposiumonAdvancesinGeographicInformationSystems (pp. 147-154).
Raskin, R. G., & Pan, M. J. (2005). Knowledge representation in the semantic web for Earth and environmental terminology (SWEET). Computers&Geosciences, 31(9), 1119–1125. doi:10.1016/j.cageo.2004.12.004
Rodriguez, A., McGrath, R., Liu, Y., & Myers, J. D. (2009). Semantic management of streaming data. In Proceedingsofthe2ndInternationalWorkshoponSemanticSensorNetworks, Washington, DC.
Russell, S., & Norvig, P. (2003). Artificial intel-ligence:Amodernapproach. Upper Saddle River, NJ: Prentice Hall.
Sengupta, R., & Sieber, R. (2007). Geospatial agents, agents everywhere. Transactions in GIS, 9(4), 483–506. doi:10.1111/j.1467-9671.2007.01057.x
Shadbolt, N., Berners-Lee, T., & Hall, W. (2006). The Semantic Web revisited. IEEEIntelligentSystems, 21(3), 96–101. doi:10.1109/MIS.2006.62
Solutions, V. Inc. (n.d.). JTStopologysuite. Retrieved from http://www.vividsolutions.com/JTS/
Stock, K., Hobona, G., Granell, C., & Jackson, M. (2011). Ontology-based geospatial approaches for semantic awareness in earth observation systems. In Ashish, N., & Sheth, A. P. (Eds.), GeospatialSeman-ticsandtheSemanticWeb (pp. 97–118). New York, NY: Springer. doi:10.1007/978-1-4419-9446-2_5

88 International Journal on Semantic Web and Information Systems, 8(1), 64-88, January-March 2012
Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.Copyright © 2012, IGI Global. Copying or distributing in print or electronic forms without written permission of IGI Global is prohibited.
Stoilos, G., Simou, N., Stamou, G., & Kollias, S. (2006). Uncertainty and the Semantic Web. IEEEIntelligent Systems, 21(5), 84–87. doi:10.1109/MIS.2006.105
Terhorst, A., Moodley, D., Simonis, I., Frost, P., McFerren, G., Roos, S., & van den Bergh, F. (2008). Using the sensor web to detect and monitor the spread of vegetation fires in Southern Africa. In S. Nittel, A. Labrinidis, & A. Stefanidis (Eds.), ProceedingsoftheSecondInternationalConferenceonGeosensorNetworks (LNCS 4540, pp. 239-251).
Unel, G., & Roman, D. (2009). Stream reasoning: A survey and further research directions. In Andreasen, T., Yager, R., Bulskov, H., Christiansen, H., & Larsen, H. (Eds.), Flexiblequeryansweringsystems (pp. 653–662). Berlin, Germany: Springer-Verlag. doi:10.1007/978-3-642-04957-6_56
Van Zyl, T. L., Simonis, I., & McFerren, G. (2009). The Sensor Web: Systems of sensor systems. In-ternationalJournalofDigitalEarth, 2(1), 16–30. doi:10.1080/17538940802439549
Wijngaards, N. J. E., Overeinder, B. J., van Steen, M., & Brazier, F. M. T. (2002). Supporting internet-scale multi-agent systems. Data & KnowledgeEngineering, 41(2-3), 229–245. doi:10.1016/S0169-023X(02)00042-3
Yang, Y., & Calmet, J. (2005). OntoBayes: An ontology-driven uncertainty model. In ProceedingsoftheInternationalConferenceonComputationalIntelligenceforModelling,ControlandAutomationandInternationalConferenceonIntelligentAgents,WebTechnologiesandInternetCommerce (Vol. 1, pp. 457-463).
Zambonelli, F., Jenning, N. R., Omicini, A., & Wooldridge, M. J. (2001). Agent-orientedsoftwareengineering for Internet agents. London, UK: Springer.
DeshendranMoodleyisaseniorlecturerincomputerscience,theresearchleaderoftheHealthArchitectureLabanddeputydirectorofthejointUniversityofKwaZulu-NatalandCSIRMerakaCentreforArtificialIntelligenceResearch.Hisresearchinterestsincludethesemanticsensorweb,architecturesforhealthinformationsystemsanddynamicknowledgedrivensystems.
IngoSimonis isManagingDirectorResearchof theInternationalGeospatialServicesInsti-tuteLtd.,GermanyandresearchleaderattheCouncilforScientificandIndustrialResearch,SouthAfrica.Hisresearchactivities focusonadvancedITsystems,knowledgemanagementandrepresentation,andinterfacedesignthatallowfortheefficientinformationexchangeandprocessingacrossheterogeneoussystems.Throughouthiscareer,Dr.SimonishaspublishednumerousscientificpapersandreviewsintheareasofITinfrastructureandenterprisesystems,interoperablesystemdesignwithfocusonSensorWebtechnology,emergencymanagement,andsystemengineering.Dr.Simonisservesasareviewerforseveraljournalsandparticipatesinnumerousprogramcommitteesforscientificconferences.
JulesR.TapamoisProfessorofComputerScienceandEngineeringattheSchoolofEngineering,UniversityofKwaZulu-Natal,SouthAfrica.HisresearchinterestsareSurfaceCharacterization,ImageProcessing,ComputerVision,MachineLearning,Biometrics, IntelligentMonitoring,ActivityrecognitionandFormalMethods.HeisamemberoftheIEEEComputerSociety,IEEESignalProcessingSociety,IEEEGeoscienceandRemoteSensingSocietyandtheACM.