
Alat navigasi
19
CV. W ELLRA CO M N USA N TA RA ALAT-ALAT NAVIGASI PADA KAPAL Disusun oleh : Erwinda Palupi Agustantina
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of Alat navigasi
CV. W ELLRACO M NUSANTARA
ALAT-ALAT NAVIGASIPADA KAPAL
Disusun oleh :
Erwinda Palupi Agustantina

1. GPS (Global Position System)Yang dimaksud dengan GPS (Global Position System) dalahsystem navigasi yang berbasiskan satelit yang salingberhubungan yang berada di orbitnya. Nama formalnya adalahNAVSTAR GPS kependekan dari Navigation Satellite and RanginPositioning System.Teknologi GPS dapat digunakan untuk beberapa keperluansesuai dengan tujuannya yakni:
LokasiDigunakan untuk menentukan dimana lokasi suatu titikdipermukaan bumi berada.
NavigasiMembantu mencari lokasi suatu titik dibumi
Tracking Membantu untuk memonitoring pergerakan obyek, membantumemetakan posisi tertentu dan perhitungan jaringanterdekat.
TimingDapat dijadikan dasar penentuan jam seluruh dunia,karena memakai jam atom yang jauh lebih presisi dibanding dengan jam biasa.
Cara kerja GPS yakni dengan menggunakan sejumlah satelityang berada diorbit bumi, yang memancarkan sinyalnya kebumidan ditangkap oleh sebuah alat penerima. Dengan menggunakanmetode Triangulasi penerima (Reciever) GPS dapat menerimainformasi waktu dan posisi dari satelit, dengan time traveltersebut akan diketuhi jarak dari posisi satelit dengan alatGPS.

Karena alat ini bergantung penuh pada satelit, maka sinyalsatelit menjadi sangat penting. Alat navigasi berbasissatelit ini tidak dapat bekerja secara maksimal apabila :
a. Kondisi geografis yakni tinggi atau rendahnyapermukaan, semakin rendahnya permukaan (lembah) makatingkat akurasinya lebih rendah
b. Alat-alat elektronik yang dapat menge;uarkan gelombangelektromagnetik
c. Sinyal yang memantul, ketika diantara gedung-gedungtinggi.
Single Line Diagram

Produk-produk GPS
KGP-920 GPS Navigator

Fully compliant with New IMO requirements.
Features
・Meeting with New IMO requirements MSC.112(73) and IEC 61108-1 Ed.2 for SOLAS carriage requirements.Approved for U.S. Coast Guard Module B.
・The KGP-920 GPS Navigator can be used as a GNSS sensor of AIS.
・SBAS (Satellite Based Augmentation System) ready.
・The true parallel 18 channel GPS receiver provides precise and quick positioning at any time.
・The built-in beacon receiver is available as an option. It can be used as a high-accuracy differential GPS navigator.
Main Specifications
KGP-920 GPS Navigator
GPS receiver section
Receiving frequency
1575.42 MHz ± 1 MHz
Receiving channel
18-channel parallel
Sensitivity Better than -130 dBm (elevation angle: 5° or over)
Position accuracy
10 m 2drms (GPS), 5 m 2drms (DGPS), 8 m 2drms (SBAS)
Beacon receiver section (with DGPS option kit)

GPS receiver Samyung SPR-1400
GPS Receiver SPR-1400 (Samyung, Korea). Automatic ruling by accuracy of receiving. Graphic display of vessel route. Information reflection on a big LCD display screen. Main menu needs adjustments. Easy in installation.
Has a type approval from RMRS as navigational GPS-receiver.
Technical specifications:Parameters, function Values
Receiving frequencies L1 1575.42MHz (C/A CODE)
Receiving type Parallel, 12 channel, digital
Accuracy GPS - 5 mDGPS - 1 m
Speed 0.1kt
Destination memory 100 points
Interface SAMYUNG, NMEA0183, FURUNO (CIF), JRC (RS-232).Input DGPS - of signal (RTCM)
Power supply unit DC 10V - 40V
Consumed capacity Less 20W
Temperature range from -15 to +55°С (main unit)from -30 to +85°С (antenna)
Dimensions 159 х 103 х 67 mm (withoutmounting tools)190 х 112 х 73 mm (including mounting tools)

Simrad GN33
General dataPower supply
12 and 24 V DC (10-32 V DC max) 8-17 watt
Power cable
Power/NMEA cable, 2 m (153-6070-002)
DimensionsH:144 mm (5.8”) W:252 mm (10”) D:70 mm (2.8”)
Weight 1.5 kg (3.3 lbs)
Environment
-10 to +55°C, IEC 60945, waterproof USC 46 CFR and IP55
HousingCasted aluminum back, polycarbonate front
DisplaySTN transflective monochrome 6” 320x240 pixels
TFT color, power backlight: 5.7” 320x240 pixels
Presentation
4 pages. Manual, dedicated and remote switch, and automatic
sequencing. Lat/Long position with 4 decimals in minutes
Antenna offset
Longitudinal and Transverse offset in 1/10 meter
Interfacing
1 port in/out NMEA 0183/0182/0180
PC up/download WPL and RTE 1 port NMEA 2000 (optional)Alarm interface
General alarm relay (contact closure)
Position missing relay (contact closure)
200 pulses per nm 5 V 50 mA output
Fuse 4.0A slow
GPS sectionReceiver 14 channel parallel, C/A
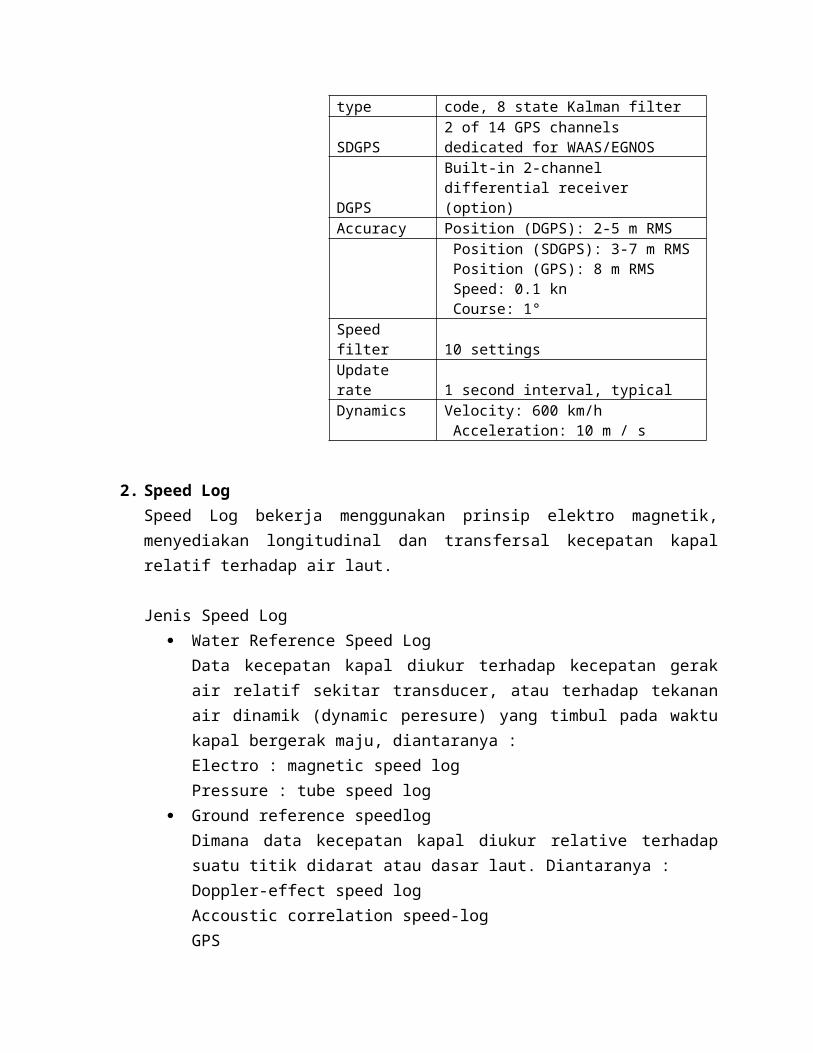
type code, 8 state Kalman filter
SDGPS2 of 14 GPS channels dedicated for WAAS/EGNOS
DGPS
Built-in 2-channel differential receiver (option)
Accuracy Position (DGPS): 2-5 m RMS Position (SDGPS): 3-7 m RMS Position (GPS): 8 m RMS Speed: 0.1 kn Course: 1°Speed filter 10 settingsUpdate rate 1 second interval, typicalDynamics Velocity: 600 km/h Acceleration: 10 m / s
2. Speed LogSpeed Log bekerja menggunakan prinsip elektro magnetik,menyediakan longitudinal dan transfersal kecepatan kapalrelatif terhadap air laut.
Jenis Speed Log Water Reference Speed Log
Data kecepatan kapal diukur terhadap kecepatan gerakair relatif sekitar transducer, atau terhadap tekananair dinamik (dynamic peresure) yang timbul pada waktukapal bergerak maju, diantaranya :Electro : magnetic speed logPressure : tube speed log
Ground reference speedlog Dimana data kecepatan kapal diukur relative terhadapsuatu titik didarat atau dasar laut. Diantaranya :Doppler-effect speed logAccoustic correlation speed-logGPS

Electro magnetik speed logBekerjanya electro-magnetic speed log, didasarkan padaprinsip “hukum Faraday” yaitu : ‘jika suatu penghantarlistrik mengalami perubahan medan magnit atau bergerakmemotong garis gaya medan magnit, maka penghantarlistrik tersebut timbul perubahan tegangan listrik ataue.m.f (electro motoric force)
Penggunaan Prinsip Doppler pada SpeedlogEfek Doppler adalah perubahan frekuensi atau pancanggelombang dari sebuah sumber gelombang yang diterima olehpengamat, jika sumber suara/gelombang tersebut bergerakrelatif terhadap pengamat/pendengar.
Adanya pergeseran frekuensi (fs) pada Doppler Effect,dimanfaatkan untuk mengukur kecepatan gerak suatu benda yangmembawa sumber getaran beserta pesawat penerimanya. Speedlog modern menggunakan prinsip Doppler effect umtuk mengukurkecepatan kapal (v) relatif terhadap dasar laut (groundreference speedlog).Ada dua macam cara pemancaran getaran mekanik Ultrasonik :
Continous Wave (CW) Menggunakan 2 buah tranducer keramik, dimana satu buahberfungsi sebagai tranducer pemancar dan memancarkan

getaran makanik ultrasonic secara terus-menerus.Sedangkan yang satunya berfungsi sebagai tranducerpenerima, siap menerima echo (gema) untuk diukurfrekuensi penerimanya yaitu fr.
Pulse modeYaitu system pulsa secara berkala dengan PRF (PulseRepeatation Frequency) tertentu tranducer pemancarmemancarkan pulsa getaran mekanik ultrasonic setelahitu tranducer tersebut berfungsi sebagai tranducerpenerima dan seterusnya. Dengan demikian diperlukansatu buah tranducer.
Cara kerja Speed log
Untuk membangkitkan getaran medan magnit disekitar tranducer, solenoid (s) dialiri arus bolak balik (i) dengan frekuensi dan intensitas arus tetap, sehingga intensitas medan magnet dari B menjadi “B sin ωt” tetap. Sebagai penghantar adalah air laut disekitar tranducer dengan jarak (l) sama dengan jarak antara kontak elektroda “a” dan “b”.
Perbedaan Antara Elektromagnetik Speed log dan Doppler Speed log.
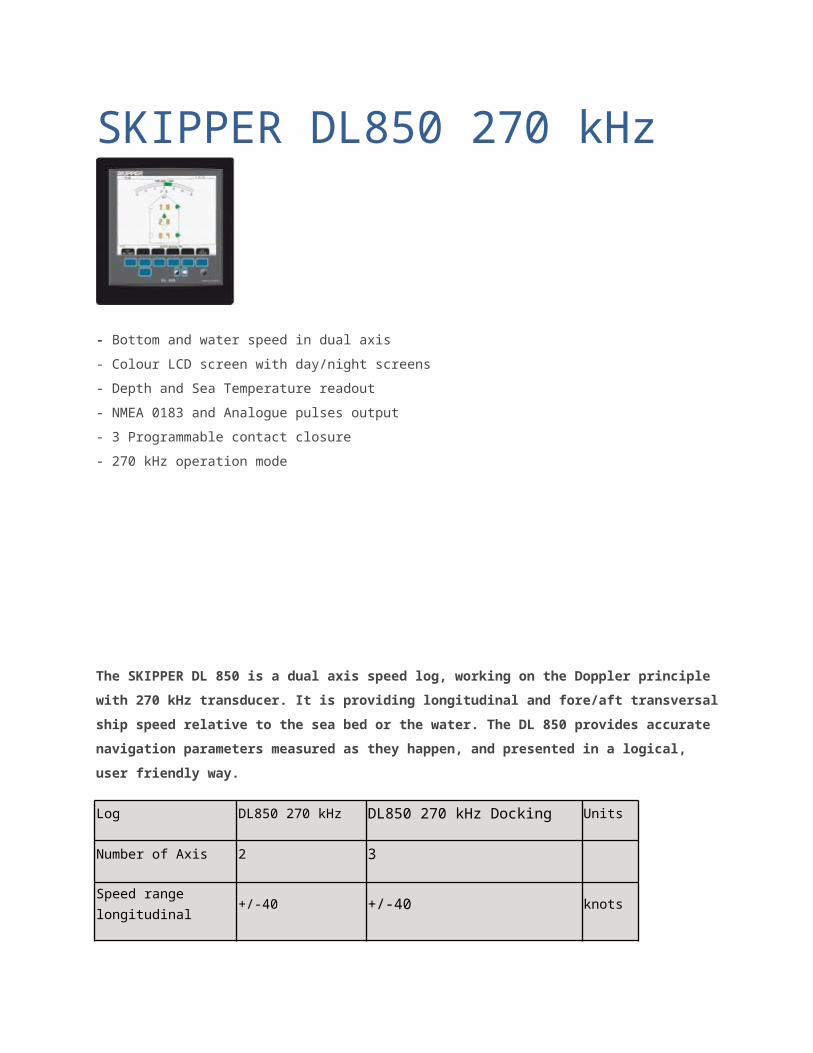
SKIPPER DL850 270 kHz
- Bottom and water speed in dual axis- Colour LCD screen with day/night screens- Depth and Sea Temperature readout- NMEA 0183 and Analogue pulses output- 3 Programmable contact closure- 270 kHz operation mode
The SKIPPER DL 850 is a dual axis speed log, working on the Doppler principle with 270 kHz transducer. It is providing longitudinal and fore/aft transversalship speed relative to the sea bed or the water. The DL 850 provides accurate navigation parameters measured as they happen, and presented in a logical, user friendly way.
Log DL850 270 kHz DL850 270 kHz Docking Units
Number of Axis 2 3
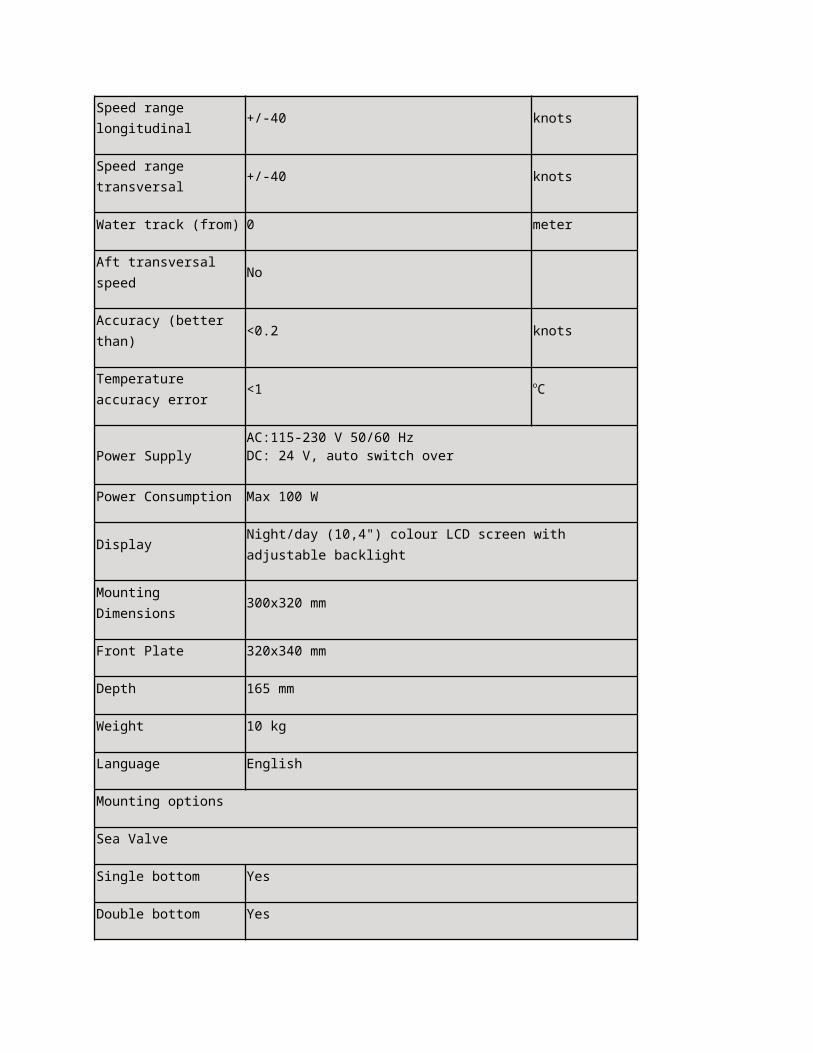
Speed range longitudinal +/-40 +/-40 knots

Speed range transversal +/-40 +/-40 knots
Bottom lock 1-200 1-200 meter
Water track (from) 2 2 meter
Aft transversal speed No Yes
Pulse output power (rms) 100 100 Watt
Accuracy (better than) <0.2 <0.2 knots
Echo Sounder
Range 200 200 meter
Frequency 270 270 kHz
Accuracy error <1 <1 %
Temperature accuracy error <1 <1 oC
Power SupplyAC:115-230 V 50/60 HzDC: 24 V, auto switch over
Power Consumption Max 100 W
DisplayNight/day (10,4") colour LCD screen with adjustable backlight
Mounting Dimensions 300 mm wide x 320 mm high
Weight 10 kg
Language English

MemoryCompact flash - for retaining operational settings and diagnostic data
ClockYear-month-day/hour-min (taken from GPS if available)
Mounting options
Sea Valve
Single bottom Yes Yes
Double bottom Yes Yes
Tank
Steel Yes Yes
Aluminium Yes Yes
Speed alarmsHigh speed limitLow speed limits
Depth alarms Deep and shallow limits
Outputs
2xNMEA 01833x0-10 V or 4-20 mA analogue3xcontact closure (pulse)Alarm (relay)VGA additional screen
Inputs 2xNMEA 0183 (OPTO isolated)
Accepted NMEA formats
Inputs
Gyro Rot, HDT
GPS GLL, GGA, RMC, VTG
Depth DPT, DBS, DBT, DBK

Outputs
Speed VBW, VHW, VTG
Distance VLW
Depth DPT, DBS, DBT, DBK
Others MTW (temp), ALR (alarm)
Classification Made to IMO performance standard
ServiceAvailable in most major harbours, world-wide through extensive dealer network
SKIPPER EML224 Graphic-Water speed in dual axis-Colour LCD screen with day/night screens-Sea Temperature readout-NMEA 0183 and Analogue pulses output-3 Programmable contact closures
The SKIPPER EML 224 is a dual axis speed log, working on the electromagnetic principle. It is providing longitudinal and transversal ship speed relative tosea water. The EML 224 gives accurate navigation parameters, measured as they happen, and presented in a logical, user friendly way.
EML224 Graphic Units
Number of Axis 2
Speed range longitudinal +/-40 knots
Speed range transversal +/-40 knots
Water track (from) 0 meter
Aft transversal speed No
Accuracy (better than) <0.2 knots
Temperature accuracy error <1 oC
Power SupplyAC:115-230 V 50/60 HzDC: 24 V, auto switch over
Power Consumption Max 100 W
Display Night/day (10,4") colour LCD screen with adjustable backlight
Mounting Dimensions 300x320 mm
Front Plate 320x340 mm
Depth 165 mm
Weight 10 kg
Language English
Mounting options
Sea Valve
Single bottom Yes
Double bottom Yes
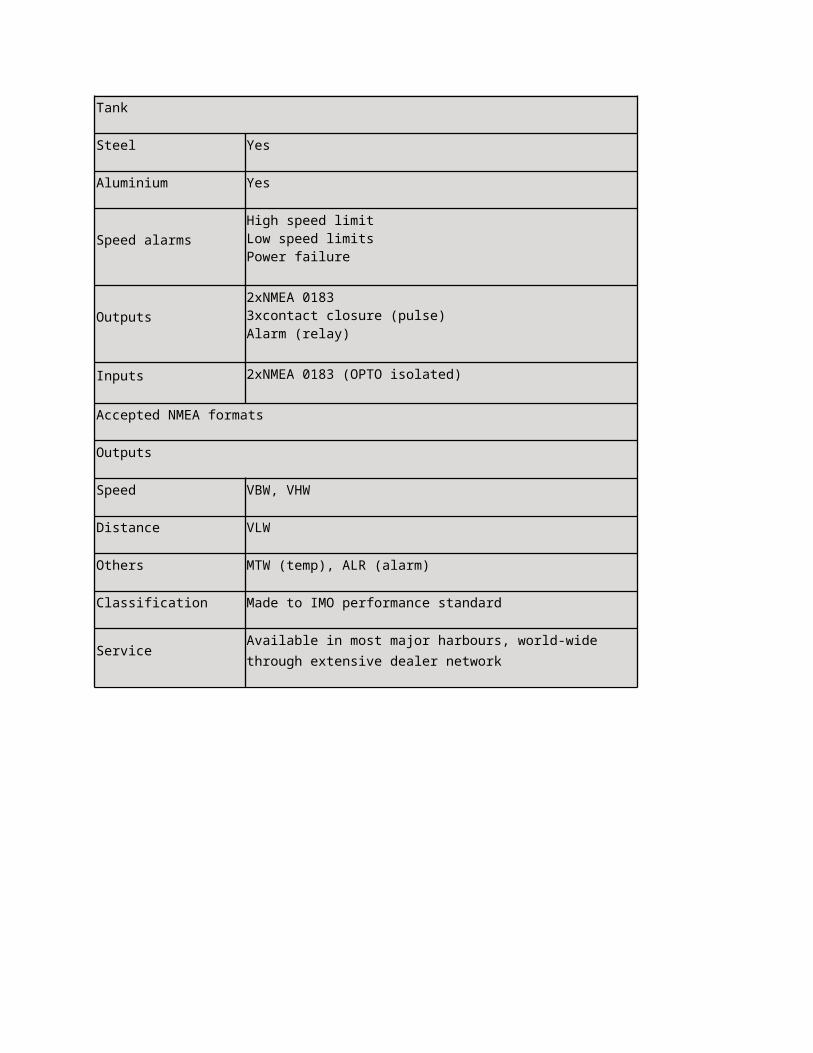
Tank
Steel Yes
Aluminium Yes
Speed alarmsHigh speed limitLow speed limitsPower failure
Outputs2xNMEA 01833xcontact closure (pulse)Alarm (relay)
Inputs 2xNMEA 0183 (OPTO isolated)
Accepted NMEA formats
Outputs
Speed VBW, VHW
Distance VLW
Others MTW (temp), ALR (alarm)
Classification Made to IMO performance standard
Service Available in most major harbours, world-wide through extensive dealer network

Ben Marine Electromagnetic Log – Anthea
AntheaElectromagnetic Speed Log simple or dual axisThe Anthea E/M Speed Log is composed of one IP65 metal case, one 48mm sensor that can be dismantled when ship is afloat including a 16m cable and one weldable or screw-on-type hullfitting with valve.
SPECIFICATIONS•Dimensions : 244 x 164 x 95 mm,•Weight: 3 kg,•Power supply : 24 Vdc or 220 Vac 50 or 60 Hz,•Outputs :•x 1/200 mile (relay outputs 24 V 250mA),•1 x 1/10 mile (open collector),•2 alarm outputs (relay outputs 50 V-2A),•1 analog output (0-500 ?A),

SingleLine Diagram – EML224
AntheaElectromagnetic Speed Log simple or dual axisThe Anthea E/M Speed Log is composed of one IP65 metal case, one 48mm sensor that can be dismantled when ship is afloat including a 16m cable and one weldable or screw-on-type hullfitting with valve.
SPECIFICATIONS•Dimensions : 244 x 164 x 95 mm,•Weight: 3 kg,•Power supply : 24 Vdc or 220 Vac 50 or 60 Hz,•Outputs :•x 1/200 mile (relay outputs 24 V 250mA),•1 x 1/10 mile (open collector),•2 alarm outputs (relay outputs 50 V-2A),•1 analog output (0-500 ?A),

Ecco sounder




















