
A study of time-domain FXLMS algorithms with control output constraint
9
A study of time-domain FXLMS algorithms with control output constraint Xiaojun Qiu and Colin H. Hansen Department of Mechanical Engineering, The University of Adelaide, South Australia 5005, Australia ~Received 14 July 2000; accepted for publication 28 February 2001! A single input, single output active noise control system using the time-domain Filtered-X LMS algorithm with output constraint is investigated. The constraint on the output of the control filter is applied by three different methods: the leakage algorithm based on the transformation method using a penalty function; the re-scaling algorithm based on the active set method; and the simple practical ~clipping! algorithm which just clips the output if a constraint is encountered. A comparison of the three algorithms shows that the re-scaling algorithm can usually work successfully under the constraint, while the leakage algorithm usually needs a large leakage coefficient to satisfy the constraint with a resulting performance loss. The clipping algorithm has potential problems both with the stability and convergence speed. © 2001 Acoustical Society of America. @DOI: 10.1121/1.1367247# PACS numbers: 43.50.Ki @MRS# I. INTRODUCTION In some active noise and vibration control applications, the total power of the control signal or the amplitude of the individual control signal is limited, either because the system being controlled does not allow large injected power or the actuators used for control have limited driving capability. For example, when vibration actuators are used in aircraft to reduce the interior noise, an excessively large control power input to the aircraft body may reduce the fatigue life due to the spillover of the control energy. 1 Examples of constraints on the individual control signal amplitude can be found where smart foam ~driven by an embedded PVDF element! or electrostrictive polymer film are used as acoustic sources for sound radiation control, 2,3 and where the piezoceramic patches are used to control power transformer noise by con- trolling the tank vibration. 4 The filtered-X least mean square ~FXLMS! algorithm is widely used for adapting the coefficients of a finite impulse response ~FIR! filter for active noise control applications. 5–9 A common practical way to constrain the output amplitude is to use leakage during the updating of the control filter coef- ficients. This is a method based on using a penalty function, which transforms the constrained optimization problem into an unconstrained optimization problem by using Lagrange multipliers, leading to a very simple form which is effec- tively the same as the multiple error LMS algorithm with leakage. 10,11 Similar ideas were used for chemical plant pro- cess control, where an analysis of the robust stability of the quadratic dynamic matrix method with hard output con- straints was given. 12 The method of using leakage has several additional ad- vantages in practical applications. For example, if a fixed point processor is used, leakage is also useful for reducing the accumulation of numerical error due to the finite- precision implementation. 7,11 For a multiple feedforward ac- tive control system, increasing the value of the leakage co- efficient can always stabilize the control system at the expense of a degradation in the steady-state error reduction. 9 However, the method does not guarantee that the control output remains within any specified constraint and the selec- tion of the value of the leakage coefficient can only be done using a trial and error procedure. Many approaches have been put forward in the past for solving constrained optimization problems and they mostly fall into two categories: function modification followed by unconstrained optimization and direction modification with- out altering the function. 13–17 The first type of approach seeks to define a new function that has an unconstrained optimum at the same point as the optimum of the given constrained problem. Optimization of this new function then defines the required change in search direction. For the sec- ond type of approach, some methods attempt to follow a constraint while others try to rebound from the constraints and so continue the search in the feasible region. The common method of using leakage in active noise control system belongs to the first category. The main advan- tage of it is that the constraints are virtually ignored; but there are serious disadvantages such as the true function might not be optimized and the constraints might be violated during optimization. A new method is proposed here for ap- plying constraints to the FXLMS algorithm, which belongs to the second category of constrained optimization ap- proaches and these are usually more efficient than the first type of approach. With the new method, the constraints are guaranteed not be violated during the optimization and the true function is optimized. The third method that is also dis- cussed in the paper is a simple method that is often used in practical situations. Here this latter method is shown to have potential problems with stability and convergence speed. In this paper, the three different methods are used to apply constraint to the control output in a single input, single output ~SISO! active noise control system and the behavior of each is compared and discussed. Note that there is also an algorithm called the constraint filtered-X algorithm, 18 which uses modified residuals for the coefficient updating. This al- 2815 2815 J. Acoust. Soc. Am. 109 (6), June 2001 0001-4966/2001/109(6)/2815/9/$18.00 © 2001 Acoustical Society of America
Transcript of A study of time-domain FXLMS algorithms with control output constraint

A study of time-domain FXLMS algorithms with controloutput constraint
Xiaojun Qiu and Colin H. HansenDepartment of Mechanical Engineering, The University of Adelaide, South Australia 5005, Australia
~Received 14 July 2000; accepted for publication 28 February 2001!
A single input, single output active noise control system using the time-domain Filtered-X LMSalgorithm with output constraint is investigated. The constraint on the output of the control filter isapplied by three different methods: the leakage algorithm based on the transformation method usinga penalty function; the re-scaling algorithm based on the active set method; and the simple practical~clipping! algorithm which just clips the output if a constraint is encountered. A comparison of thethree algorithms shows that the re-scaling algorithm can usually work successfully under theconstraint, while the leakage algorithm usually needs a large leakage coefficient to satisfy theconstraint with a resulting performance loss. The clipping algorithm has potential problems bothwith the stability and convergence speed. ©2001 Acoustical Society of America.@DOI: 10.1121/1.1367247#
PACS numbers: 43.50.Ki@MRS#
nsheemthtyftwto
ndtce
icco
lse
ieiontg
c-tho-thn
ae
cinte-cthio
trollec-ne
fortlyyh-
inedenensec-
ants
isean-utctiontedp-s
ap-firstaretheis-d inave
tole
ioro an
al-
I. INTRODUCTION
In some active noise and vibration control applicatiothe total power of the control signal or the amplitude of tindividual control signal is limited, either because the systbeing controlled does not allow large injected power oractuators used for control have limited driving capabiliFor example, when vibration actuators are used in aircrareduce the interior noise, an excessively large control poinput to the aircraft body may reduce the fatigue life duethe spillover of the control energy.1 Examples of constraintson the individual control signal amplitude can be fouwhere smart foam~driven by an embedded PVDF elemen!or electrostrictive polymer film are used as acoustic sourfor sound radiation control,2,3 and where the piezocerampatches are used to control power transformer noise bytrolling the tank vibration.4
The filtered-X least mean square~FXLMS! algorithm iswidely used for adapting the coefficients of a finite impuresponse~FIR! filter for active noise control applications.5–9
A common practical way to constrain the output amplitudeto use leakage during the updating of the control filter coficients. This is a method based on using a penalty functwhich transforms the constrained optimization problem ian unconstrained optimization problem by using Lagranmultipliers, leading to a very simple form which is effetively the same as the multiple error LMS algorithm wileakage.10,11 Similar ideas were used for chemical plant prcess control, where an analysis of the robust stability ofquadratic dynamic matrix method with hard output costraints was given.12
The method of using leakage has several additionalvantages in practical applications. For example, if a fixpoint processor is used, leakage is also useful for reduthe accumulation of numerical error due to the finiprecision implementation.7,11 For a multiple feedforward active control system, increasing the value of the leakageefficient can always stabilize the control system atexpense of a degradation in the steady-state error reduct9
2815 J. Acoust. Soc. Am. 109 (6), June 2001 0001-4966/2001/10
,
e.toer
s
n-
sf-n,oe
e-
d-dg
-
o-en.
However, the method does not guarantee that the conoutput remains within any specified constraint and the setion of the value of the leakage coefficient can only be dousing a trial and error procedure.
Many approaches have been put forward in the pastsolving constrained optimization problems and they mosfall into two categories: function modification followed bunconstrained optimization and direction modification witout altering the function.13–17 The first type of approachseeks to define a new function that has an unconstraoptimum at the same point as the optimum of the givconstrained problem. Optimization of this new function thdefines the required change in search direction. For theond type of approach, some methods attempt to followconstraint while others try to rebound from the constraiand so continue the search in the feasible region.
The common method of using leakage in active nocontrol system belongs to the first category. The main advtage of it is that the constraints are virtually ignored; bthere are serious disadvantages such as the true funmight not be optimized and the constraints might be violaduring optimization. A new method is proposed here for aplying constraints to the FXLMS algorithm, which belongto the second category of constrained optimizationproaches and these are usually more efficient than thetype of approach. With the new method, the constraintsguaranteed not be violated during the optimization andtrue function is optimized. The third method that is also dcussed in the paper is a simple method that is often usepractical situations. Here this latter method is shown to hpotential problems with stability and convergence speed.
In this paper, the three different methods are usedapply constraint to the control output in a single input, singoutput ~SISO! active noise control system and the behavof each is compared and discussed. Note that there is alsalgorithm called the constraint filtered-X algorithm,18 whichuses modified residuals for the coefficient updating. This
28159(6)/2815/9/$18.00 © 2001 Acoustical Society of America
n
n.
-e
dge
ion
o
ut-
e
-
ua-
ed
sr.
forr
he
tro
gorithm is not relevant to the control output amplitude costraint problem discussed here.
II. DESCRIPTION OF THE METHODS
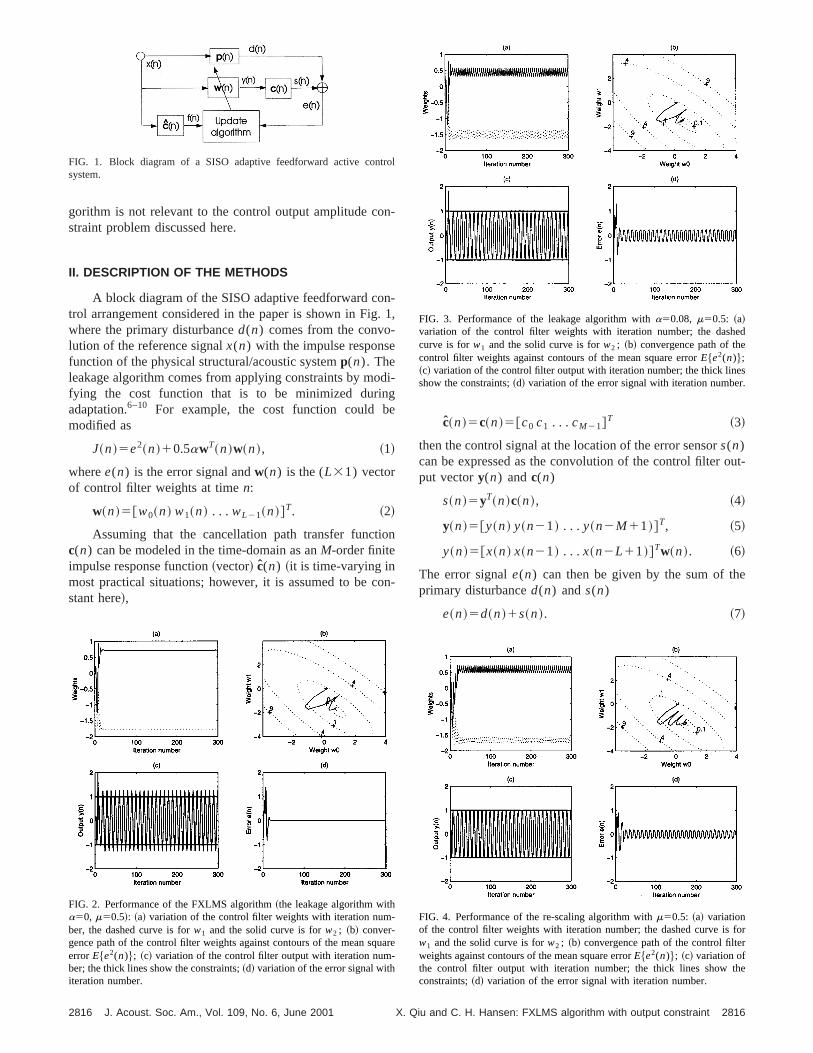
A block diagram of the SISO adaptive feedforward cotrol arrangement considered in the paper is shown in Figwhere the primary disturbanced(n) comes from the convolution of the reference signalx(n) with the impulse responsfunction of the physical structural/acoustic systemp(n). Theleakage algorithm comes from applying constraints by mofying the cost function that is to be minimized durinadaptation.6–10 For example, the cost function could bmodified as
J~n!5e2~n!10.5awT~n!w~n!, ~1!
wheree(n) is the error signal andw(n) is the (L31) vectorof control filter weights at timen:
w~n!5@w0~n! w1~n! . . . wL21~n!#T. ~2!
Assuming that the cancellation path transfer functc(n) can be modeled in the time-domain as anM-order finiteimpulse response function~vector! c(n) ~it is time-varying inmost practical situations; however, it is assumed to be cstant here!,
FIG. 2. Performance of the FXLMS algorithm~the leakage algorithm witha50, m50.5!: ~a! variation of the control filter weights with iteration number, the dashed curve is forw1 and the solid curve is forw2 ; ~b! conver-gence path of the control filter weights against contours of the mean sqerror E$e2(n)%; ~c! variation of the control filter output with iteration number; the thick lines show the constraints;~d! variation of the error signal withiteration number.
FIG. 1. Block diagram of a SISO adaptive feedforward active consystem.
2816 J. Acoust. Soc. Am., Vol. 109, No. 6, June 2001 X. Q
-
-1,
i-
n-
c~n!5c~n!5@c0 c1 . . . cM21#T ~3!
then the control signal at the location of the error sensors(n)can be expressed as the convolution of the control filter oput vectory(n) andc(n)
s~n!5yT~n!c~n!, ~4!
y~n!5@y~n! y~n21! . . . y~n2M11!#T, ~5!
y~n!5@x~n! x~n21! . . . x~n2L11!#Tw~n!. ~6!
The error signale(n) can then be given by the sum of thprimary disturbanced(n) ands(n)
e~n!5d~n!1s~n!. ~7!
re
FIG. 3. Performance of the leakage algorithm witha50.08, m50.5: ~a!variation of the control filter weights with iteration number; the dashcurve is forw1 and the solid curve is forw2 ; ~b! convergence path of thecontrol filter weights against contours of the mean square errorE$e2(n)%;~c! variation of the control filter output with iteration number; the thick lineshow the constraints;~d! variation of the error signal with iteration numbe
FIG. 4. Performance of the re-scaling algorithm withm50.5: ~a! variationof the control filter weights with iteration number; the dashed curve isw1 and the solid curve is forw2 ; ~b! convergence path of the control filteweights against contours of the mean square errorE$e2(n)%; ~c! variation ofthe control filter output with iteration number; the thick lines show tconstraints;~d! variation of the error signal with iteration number.
l
2816iu and C. H. Hansen: FXLMS algorithm with output constraint
-c-
l
t
lueem
rogil
agngneraniv
he
si-
two
anso-of
ngnd-them
r
he
ver-
ean
The resulting leaky FXLMS algorithm is expressed as
w~n11!5~12am!w~n!22me~n!f~n!, ~8!
wherea is the leakage coefficient,m is the convergence coefficient, andf(n) is called the filtered reference signal vetor, which is obtained by filtering the reference signalx(n)with c(n):
f~n!5@ f ~n! f ~n21! . . . f ~n2L11!#T, ~9!
f ~n!5@x~n! x~n21! . . . x~n2M11!#Tc~n!. ~10!
The constraint equation is
uy~n!u,Amax, ~11!
whereAmax is a number~depending on bits of the digital toanalog converter of the system! proportional to the maximaallowed voltage of the output.
The problem with the original FXLMS algorithm is thait sometimes fails to satisfy constraint equation~11! duringupdating. The addition of leakage in Eq.~8! remedies theproblem by continual removal, or leakage, of a small vafrom the weights, which represents a compromise betwbiasing the control filter weights from the original optimusolution@where the cost function ise2(n)] and bounding thecontrol effort. Therefore the final performance of the contalgorithm significantly depends on the value of the leakacoefficient and it is not guaranteed that the final solution wbe within the constraint.
It is possible to increase the performance of the leakalgorithm by applying a time-varying leakage coefficiea(n), corresponding to the minimization of a time-varyincost function,10,11 which, however, will not be discussed ithe paper. The leakage algorithm discussed in the papconfined to the normal adaptive algorithm with a constleakage coefficient that is most commonly used in actnoise control.
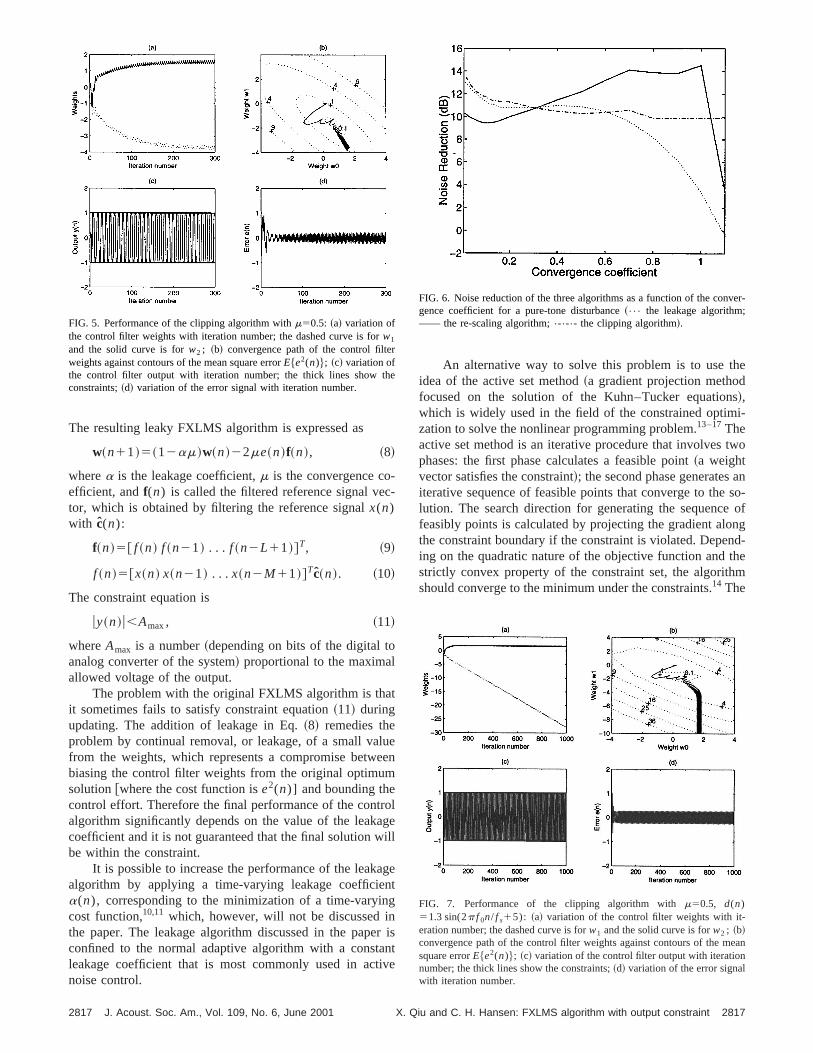
FIG. 5. Performance of the clipping algorithm withm50.5: ~a! variation ofthe control filter weights with iteration number; the dashed curve is forw1
and the solid curve is forw2 ; ~b! convergence path of the control filteweights against contours of the mean square errorE$e2(n)%; ~c! variation ofthe control filter output with iteration number; the thick lines show tconstraints;~d! variation of the error signal with iteration number.
2817 J. Acoust. Soc. Am., Vol. 109, No. 6, June 2001 X. Q
en
lel
et
iste
An alternative way to solve this problem is to use tidea of the active set method~a gradient projection methodfocused on the solution of the Kuhn–Tucker equation!,which is widely used in the field of the constrained optimzation to solve the nonlinear programming problem.13–17Theactive set method is an iterative procedure that involvesphases: the first phase calculates a feasible point~a weightvector satisfies the constraint!; the second phase generatesiterative sequence of feasible points that converge to thelution. The search direction for generating the sequencefeasibly points is calculated by projecting the gradient alothe constraint boundary if the constraint is violated. Depeing on the quadratic nature of the objective function andstrictly convex property of the constraint set, the algorithshould converge to the minimum under the constraints.14 The
FIG. 6. Noise reduction of the three algorithms as a function of the congence coefficient for a pure-tone disturbance~••• the leakage algorithm;—— the re-scaling algorithm;•-•-•- the clipping algorithm!.
FIG. 7. Performance of the clipping algorithm withm50.5, d(n)51.3 sin(2p f 0n/ f s15): ~a! variation of the control filter weights with it-eration number; the dashed curve is forw1 and the solid curve is forw2 ; ~b!convergence path of the control filter weights against contours of the msquare errorE$e2(n)%; ~c! variation of the control filter output with iterationnumber; the thick lines show the constraints;~d! variation of the error signalwith iteration number.
2817iu and C. H. Hansen: FXLMS algorithm with output constraint
hi
ra-
bti
oxis
ohthmieffirt
.eats
n
fatthemisn isoten-
his
ve
algorithm so obtained is called the rescaling algorithm in tpaper and is given by
w~n11!5w~n!22me~n!f~n!, ~12!
y~n11!5@x~n11! x~n! . . . x~n2L12!#Tw~n11!,~13!
if ~ uy~n11!u.Amax!, then
w~n11!5w~n11!~Amax/uy~n11!u!, ~14!
y~n11!5y~n11!~Amax/uy~n11!u!. ~15!
The original FXLMS algorithm uses the estimated gdient 2e(n)f(n) as the weight update vector, which, however, sometimes makesuy(n)u greater thanAmax after updat-ing. The proposed algorithm remedies the problemprojecting the estimated gradient into the constraint seobtain the new updated vector, which is simply obtainedEq. ~14! by re-scaling the control weight vector and controutput after the updating. Note, a faster algorithm may eby using the idea of the affine-scaling algorithm,15 however,this is outside the scope of this paper.
The re-scaling algorithm is similar to the leakage algrithm in the sense of scaling the values of the filter weigwhen the output is too large. Actually, the leakage algoritcan be made to be equivalent to the re-scaling algorithm wsome kind of specific selection of the noncontinuous timvarying leakage coefficient. For example, the leaky coecienta is set to zero if the output is small and the leaky pa(12am) in Eq. ~8!, is set equal toAmax/uy(n11)u if theoutput is greater than the maximal allowed amplitude10
However, the re-scaling algorithm originates from an idthat is completely different to the ‘‘leaking’’ mechanism thtends to increase the robustness of the system at the cothe performance.
A method being used in many practical implementatio~called the clipping algorithm in this paper! is given by
w~n11!5w~n!22me~n!f~n!, ~16!
y~n11!5@x~n11! x~n! . . . x~n2L12!#Tw~n11!,~17!
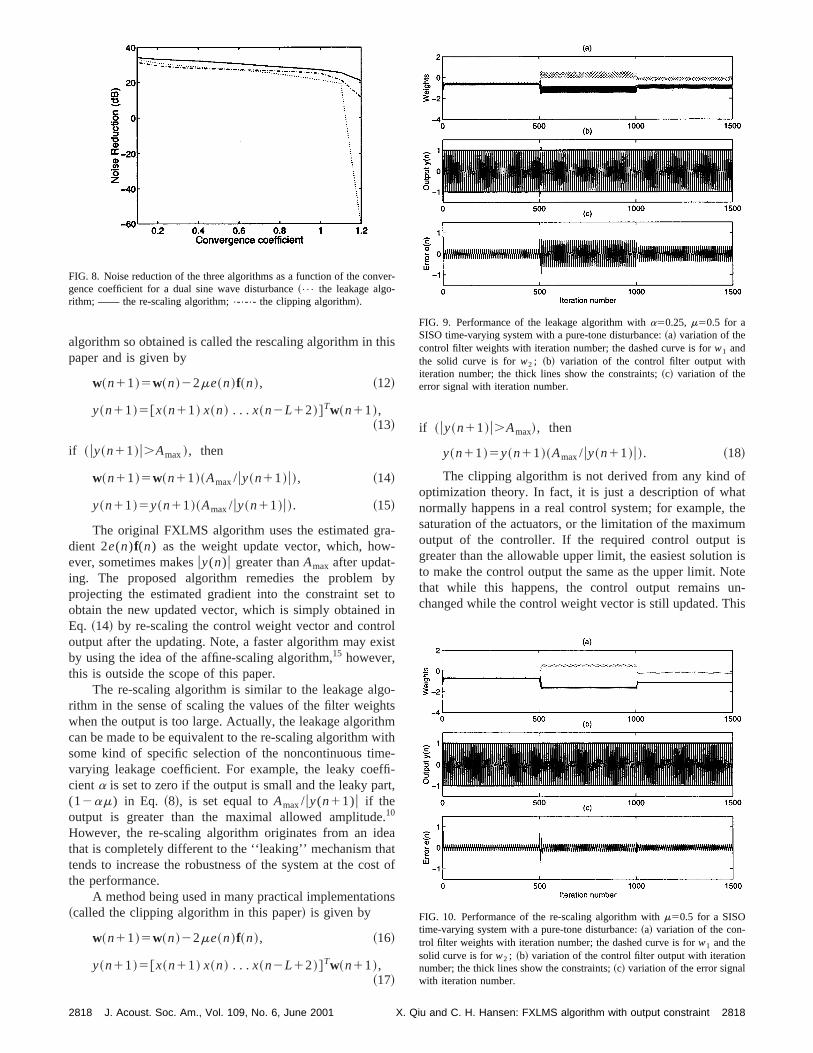
FIG. 8. Noise reduction of the three algorithms as a function of the congence coefficient for a dual sine wave disturbance~••• the leakage algo-rithm; —— the re-scaling algorithm;•-•-•- the clipping algorithm!.
2818 J. Acoust. Soc. Am., Vol. 109, No. 6, June 2001 X. Q
s
-
ytonlt
-s
th--,
a
t of
s
if ~ uy~n11!u.Amax!, then
y~n11!5y~n11!~Amax/uy~n11!u!. ~18!
The clipping algorithm is not derived from any kind ooptimization theory. In fact, it is just a description of whnormally happens in a real control system; for example,saturation of the actuators, or the limitation of the maximuoutput of the controller. If the required control outputgreater than the allowable upper limit, the easiest solutioto make the control output the same as the upper limit. Nthat while this happens, the control output remains uchanged while the control weight vector is still updated. T
r-
FIG. 9. Performance of the leakage algorithm witha50.25, m50.5 for aSISO time-varying system with a pure-tone disturbance:~a! variation of thecontrol filter weights with iteration number; the dashed curve is forw1 andthe solid curve is forw2 ; ~b! variation of the control filter output withiteration number; the thick lines show the constraints;~c! variation of theerror signal with iteration number.
FIG. 10. Performance of the re-scaling algorithm withm50.5 for a SISOtime-varying system with a pure-tone disturbance:~a! variation of the con-trol filter weights with iteration number; the dashed curve is forw1 and thesolid curve is forw2 ; ~b! variation of the control filter output with iterationnumber; the thick lines show the constraints;~c! variation of the error signalwith iteration number.
2818iu and C. H. Hansen: FXLMS algorithm with output constraint
tereleoa
e
ofro
udth,
ea
mth
pu
cute
in
o
l-oton
linthin
ththoir-thuti
ithtw
othth
igh-pli-
go-
as
the
-cu-
causes potential problems to the controller, as is shown laThe difference between the clipping algorithm and thescaling algorithm is that the clipping algorithm just re-scathe output instead of re-scaling both the output and the ctrol filter weights when a constraint is encountered. As cbe seen in the text, the clipping Eq.~18! is the same as there-scaling Eq.~15!, but that Eq.~14! is not applied.
III. SIMULATIONS AND DISCUSSION
For the first simulation, the following definitions werused: the sampling frequency of the systemf s52000 Hz, thefrequency of the disturbancef 05200 Hz, Amax51.0, x(n)5sin(2p f 0n/ f s), d(n)51.2 sin(2p f 0n/ f s15), c(n)[email protected] 0.5#T, m50.5. For clarity in presenting the resultsthe simulations, only two weights were used for the contfilter, which started fromw(0)[email protected] 0.0#T. Figures 2–5show the results of the above algorithms. The noise redtion NR after convergence is 10.9 dB, 12.2 dB, and 10.4for the leakage algorithm, the re-scaling algorithm, andclipping algorithm, respectively. For the FXLMS algorithmthe noise reduction tends to be infinitely large in this idsystem. NR is defined as~whereE$ % is the expected value!
NR510 log10~E$d2~n!%/E$e2~n!%!. ~19!
It can be seen from Fig. 2 that the FXLMS algorithcould successfully converge to the optimum and reduceddisturbance to almost zero. However, the control filter outconstraint was violated as shown in Fig. 2~c!. By a procedureof trial and error, the leakage coefficienta was selected as0.08, which made the control filter output after convergenlie within the constraint. However, the control filter outpstill violated the constraint during the early adaptation priod, as shown in Fig. 3~c!. Also, as shown in Fig. 3~b!, theconvergence path could not achieve the optimum po~where the cost function isE$e2(n)% due to the leakage!although it probably converged to the optimum solutionthe problem where the cost function isE$e2(n)10.5awT(n)w(n)%. The noise reduction of the leakage agorithm witha50.08 is less than that of the re-scaling algrithm or the clipping algorithm. However, it is possibleincrease the NR of the leakage algorithm after convergeby more careful selection of the leakage coefficient,a.
It can be seen from Figs. 4 and 5 that both the re-scaalgorithm and the clipping algorithm were able to reduceerror signal while at the same time maintain the constrafor the current setup. Although the noise reduction ofre-scaling method is higher than the clipping method forcurrent setup, there may be other setups for which the nreduction of the clipping method is higher. One big diffeence between the two methods is that the re-scaling meseemed to stop convergence before it reached the optimwhile the clipping method continued going through the opmum point as seen from Figs. 4~b! and 5~b!. The clippingalgorithm tended to converge to control filter weights wlarger absolute values. Another difference between thealgorithms can be seen from Figs. 4~d! and 5~d!, where theclipping algorithm produced many high-frequency compnents in the residual error signal, which is caused bysimple crude clipping process. In this case, even though
2819 J. Acoust. Soc. Am., Vol. 109, No. 6, June 2001 X. Q
r.-sn-n
l
c-Be
l
et
e
-
t
f
-
ce
get
eese
odm,-
o
-ee
original noise was reduced, the generated uncorrelated hfrequency components may increase the time-domain amtude of the error signal, as can be seen in Fig. 5~d! afterabout iteration 30.
Figure 6 shows the noise reduction of the three alrithms as a function of the convergence coefficientm. For theleakage algorithm, the leakage coefficient was selecteda50.08. The convergence coefficientm was selected from0.01 to 1.1. This was obtained from a simulation whereFXLMS algorithm without leakage began to diverge whenmexceeded 0.8. Although a smallerm may achieve better performance, it takes longer to converge. For all the NR cal
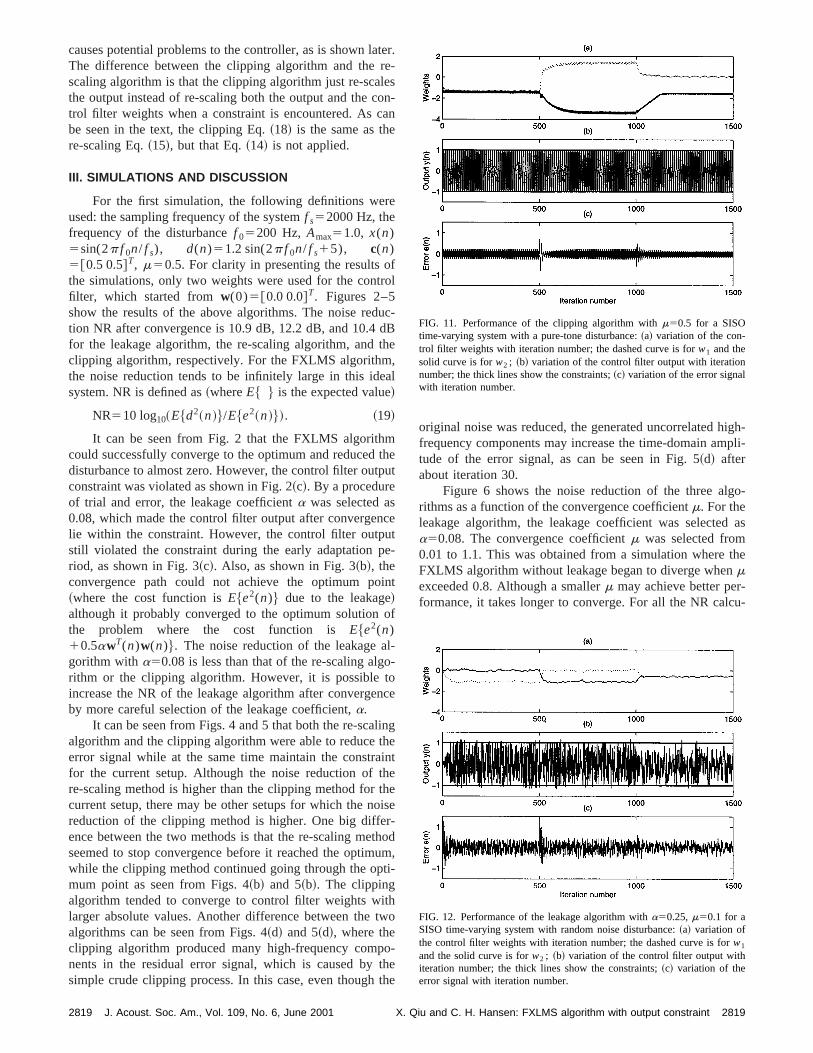
FIG. 11. Performance of the clipping algorithm withm50.5 for a SISOtime-varying system with a pure-tone disturbance:~a! variation of the con-trol filter weights with iteration number; the dashed curve is forw1 and thesolid curve is forw2 ; ~b! variation of the control filter output with iterationnumber; the thick lines show the constraints;~c! variation of the error signalwith iteration number.
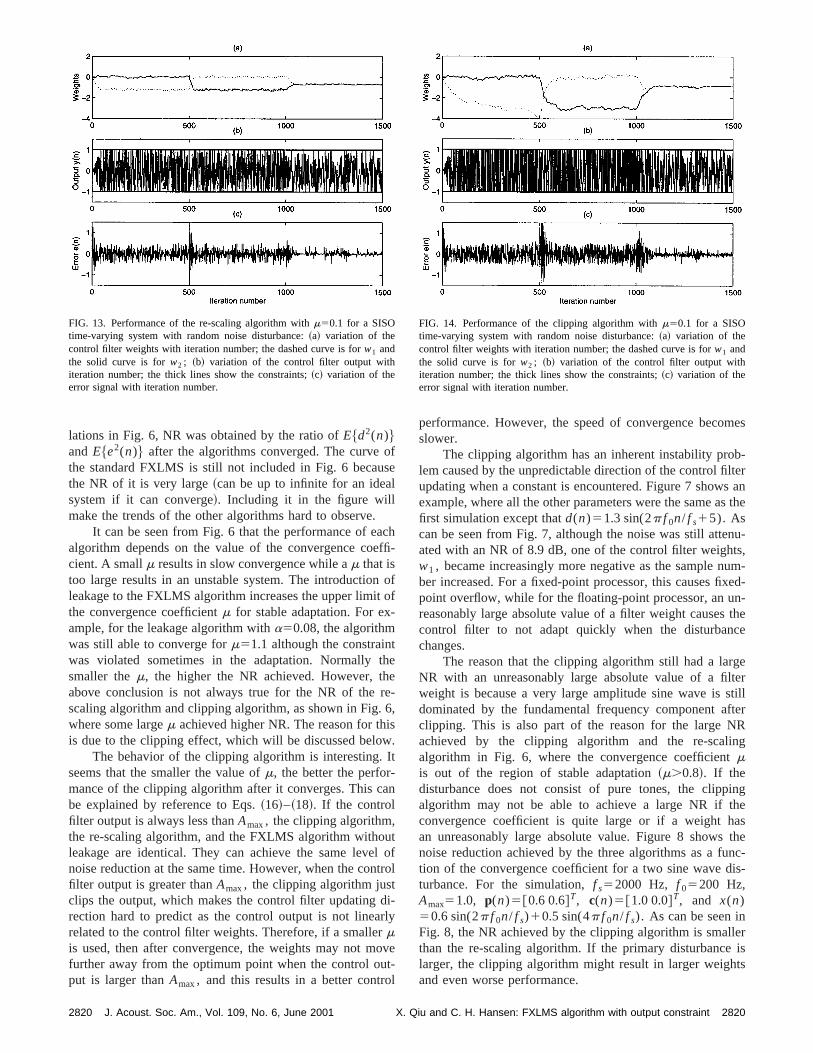
FIG. 12. Performance of the leakage algorithm witha50.25,m50.1 for aSISO time-varying system with random noise disturbance:~a! variation ofthe control filter weights with iteration number; the dashed curve is forw1
and the solid curve is forw2 ; ~b! variation of the control filter output withiteration number; the thick lines show the constraints;~c! variation of theerror signal with iteration number.
2819iu and C. H. Hansen: FXLMS algorithm with output constraint
osel
.acef
o-
tthe
re6iswIt
a
utltr
dirly
ot-l
mes
b-lters ans the
nu-s,um-xed-n-the
ce
geterstillfterR
ng
ingheasthenc-is-
leris
ts
lations in Fig. 6, NR was obtained by the ratio ofE$d2(n)%and E$e2(n)% after the algorithms converged. The curvethe standard FXLMS is still not included in Fig. 6 becauthe NR of it is very large~can be up to infinite for an ideasystem if it can converge!. Including it in the figure willmake the trends of the other algorithms hard to observe
It can be seen from Fig. 6 that the performance of ealgorithm depends on the value of the convergence cocient. A smallm results in slow convergence while am that istoo large results in an unstable system. The introductionleakage to the FXLMS algorithm increases the upper limitthe convergence coefficientm for stable adaptation. For example, for the leakage algorithm witha50.08, the algorithmwas still able to converge form51.1 although the constrainwas violated sometimes in the adaptation. Normallysmaller them, the higher the NR achieved. However, thabove conclusion is not always true for the NR of thescaling algorithm and clipping algorithm, as shown in Fig.where some largem achieved higher NR. The reason for this due to the clipping effect, which will be discussed belo
The behavior of the clipping algorithm is interesting.seems that the smaller the value ofm, the better the perfor-mance of the clipping algorithm after it converges. This cbe explained by reference to Eqs.~16!–~18!. If the controlfilter output is always less thanAmax, the clipping algorithm,the re-scaling algorithm, and the FXLMS algorithm witholeakage are identical. They can achieve the same levenoise reduction at the same time. However, when the confilter output is greater thanAmax, the clipping algorithm justclips the output, which makes the control filter updatingrection hard to predict as the control output is not linearelated to the control filter weights. Therefore, if a smallermis used, then after convergence, the weights may not mfurther away from the optimum point when the control ouput is larger thanAmax, and this results in a better contro
FIG. 13. Performance of the re-scaling algorithm withm50.1 for a SISOtime-varying system with random noise disturbance:~a! variation of thecontrol filter weights with iteration number; the dashed curve is forw1 andthe solid curve is forw2 ; ~b! variation of the control filter output withiteration number; the thick lines show the constraints;~c! variation of theerror signal with iteration number.
2820 J. Acoust. Soc. Am., Vol. 109, No. 6, June 2001 X. Q
f
hfi-
off
e
-,
.
n
ofol
-
ve
performance. However, the speed of convergence becoslower.
The clipping algorithm has an inherent instability prolem caused by the unpredictable direction of the control fiupdating when a constant is encountered. Figure 7 showexample, where all the other parameters were the same afirst simulation except thatd(n)51.3 sin(2p f 0n/ f s15). Ascan be seen from Fig. 7, although the noise was still atteated with an NR of 8.9 dB, one of the control filter weightw1 , became increasingly more negative as the sample nber increased. For a fixed-point processor, this causes fipoint overflow, while for the floating-point processor, an ureasonably large absolute value of a filter weight causescontrol filter to not adapt quickly when the disturbanchanges.
The reason that the clipping algorithm still had a larNR with an unreasonably large absolute value of a filweight is because a very large amplitude sine wave isdominated by the fundamental frequency component aclipping. This is also part of the reason for the large Nachieved by the clipping algorithm and the re-scalialgorithm in Fig. 6, where the convergence coefficientmis out of the region of stable adaptation~m.0.8!. If thedisturbance does not consist of pure tones, the clippalgorithm may not be able to achieve a large NR if tconvergence coefficient is quite large or if a weight han unreasonably large absolute value. Figure 8 showsnoise reduction achieved by the three algorithms as a fution of the convergence coefficient for a two sine wave dturbance. For the simulation,f s52000 Hz, f 05200 Hz,Amax51.0, p(n)[email protected] 0.6#T, c(n)[email protected] 0.0#T, and x(n)50.6 sin(2p f 0n/ f s)10.5 sin(4p f 0n/ f s). As can be seen inFig. 8, the NR achieved by the clipping algorithm is smalthan the re-scaling algorithm. If the primary disturbancelarger, the clipping algorithm might result in larger weighand even worse performance.
FIG. 14. Performance of the clipping algorithm withm50.1 for a SISOtime-varying system with random noise disturbance:~a! variation of thecontrol filter weights with iteration number; the dashed curve is forw1 andthe solid curve is forw2 ; ~b! variation of the control filter output withiteration number; the thick lines show the constraints;~c! variation of theerror signal with iteration number.
2820iu and C. H. Hansen: FXLMS algorithm with output constraint
ans
ed
s
u-ls
ovgomtimfoefa
iiefegb
nts
tahmta
erur
ed
co-fis-e
rom
oes
ple
rm
r;
If the disturbance is so large that the control output cnot achieve the required amplitude, there always existcertain level of residual error signal. As shown in Eqs.~8!,~12!, and~16!, the amplitude of the update vector is decidby the product of the convergence coefficientm and the am-plitude of the error signal~the filtered reference signal iassumed fixed!, so reducing the value ofm will reduce theswung amplitude of the control filter weights. This will usally increase the performance of the algorithm. This can abe seen in Fig. 8, where the smaller them, the higher the NRachieved for all three algorithms~remember smallm meansslow adaptation!.
Some short conclusions can be drawn from the absimulations. First, all three algorithms, the leakage alrithm, the re-scaling algorithm, and the clipping algorithare able to reduce the disturbance while at the samemaintain the output constraint. Second, it is normally trueall three algorithms that the smaller the convergence cocient, the larger the noise reduction, and the slower theaptation speed. Some exceptions exist for the re-scalinggorithm and the clipping algorithm where the disturbancea pure tone, in which case a large convergence coefficresulted in large noise reductions due to the nonlinear efassociated with clipping of a sine wave. Third, the leakaalgorithm does not guarantee that the constraint will notviolated, even for a large leakage coefficient~the larger theleakage, the lower the noise reduction!; the clipping algo-rithm sometimes has potential problems with stability aconvergence speed due to the large absolute value ofcontrol weights. The re-scaling algorithm seems to be a uful algorithm that can reduce the disturbance and mainthe output constraint at all times. It is also a stable algoritprovided that the convergence coefficient is within the sbility constraint for the FXLMS algorithm.
Figures 9–14 further illustrate the behavior of the thralgorithms. Figures 9–11 show results of simulations fotime-varying SISO system. During the simulation, the distbance is a pure tone with a frequency off 05200 Hz, f s
52000 Hz, x(n)5sin(2p f 0n/ f s), and c(n)[email protected] 0.5#T.
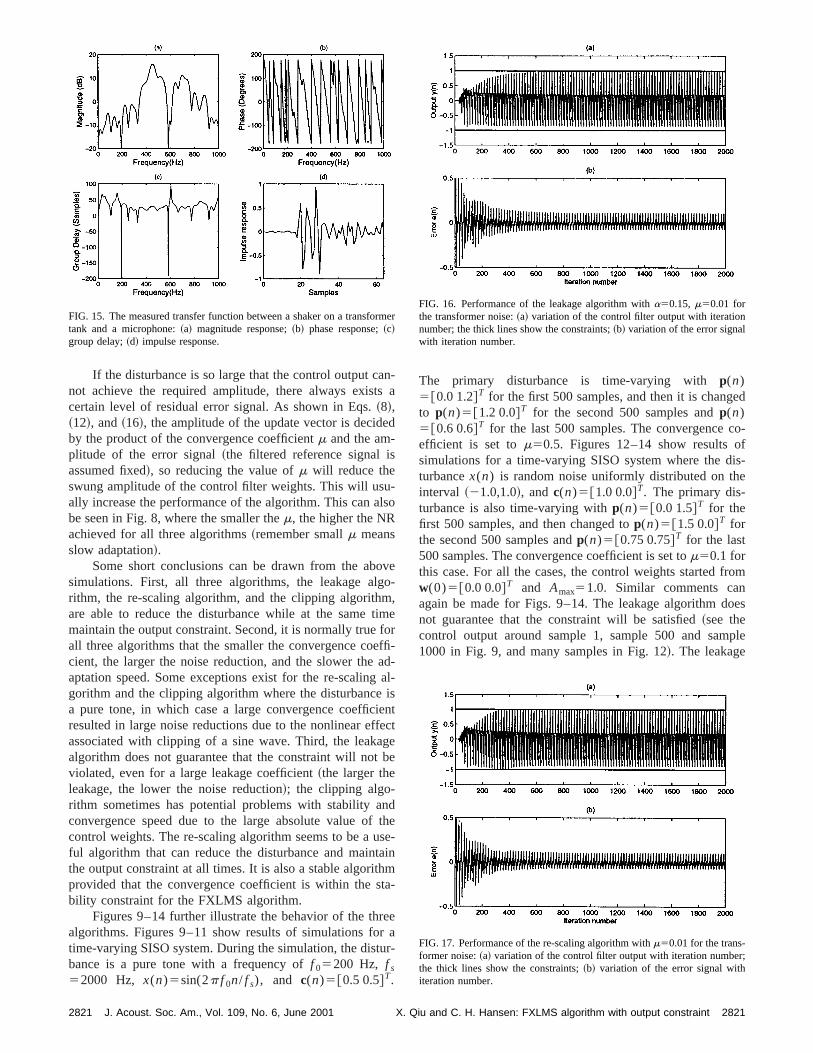
FIG. 15. The measured transfer function between a shaker on a transfotank and a microphone:~a! magnitude response;~b! phase response;~c!group delay;~d! impulse response.
2821 J. Acoust. Soc. Am., Vol. 109, No. 6, June 2001 X. Q
-a
o
e-
,e
rfi-d-al-sntctee
dhee-in
-
ea-
The primary disturbance is time-varying withp(n)[email protected] 1.2#T for the first 500 samples, and then it is changto p(n)[email protected] 0.0#T for the second 500 samples andp(n)[email protected] 0.6#T for the last 500 samples. The convergenceefficient is set tom50.5. Figures 12–14 show results osimulations for a time-varying SISO system where the dturbancex(n) is random noise uniformly distributed on thinterval ~21.0,1.0!, andc(n)[email protected] 0.0#T. The primary dis-turbance is also time-varying withp(n)[email protected] 1.5#T for thefirst 500 samples, and then changed top(n)[email protected] 0.0#T forthe second 500 samples andp(n)[email protected] 0.75#T for the last500 samples. The convergence coefficient is set tom50.1 forthis case. For all the cases, the control weights started fw(0)[email protected] 0.0#T and Amax51.0. Similar comments canagain be made for Figs. 9–14. The leakage algorithm dnot guarantee that the constraint will be satisfied~see thecontrol output around sample 1, sample 500 and sam1000 in Fig. 9, and many samples in Fig. 12!. The leakage
erFIG. 16. Performance of the leakage algorithm witha50.15, m50.01 forthe transformer noise:~a! variation of the control filter output with iterationnumber; the thick lines show the constraints;~b! variation of the error signalwith iteration number.
FIG. 17. Performance of the re-scaling algorithm withm50.01 for the trans-former noise:~a! variation of the control filter output with iteration numbethe thick lines show the constraints;~b! variation of the error signal withiteration number.
2821iu and C. H. Hansen: FXLMS algorithm with output constraint
atncdsooa
ioakroh
hio
-onthl
rtioman
mev-
nbthageBthgon
tlyt theuce
be
mtere
er.tionm
tical-u-wasns-ns-m
theeffi-ss.
he
r
rol’’ J.
r-nd
tic
n,
r; ion:
coefficienta had to be selected as large asa50.25 so thatthe control output after convergence would seldom violthe constraint. However, this resulted in poor performafor the leakage algorithm. The clipping algorithm adaptelittle slower than the other algorithms due to the large ablute value of the control filter weights. The re-scaling algrithm usually has the smallest residual error signal while sisfying the constraint at all times.
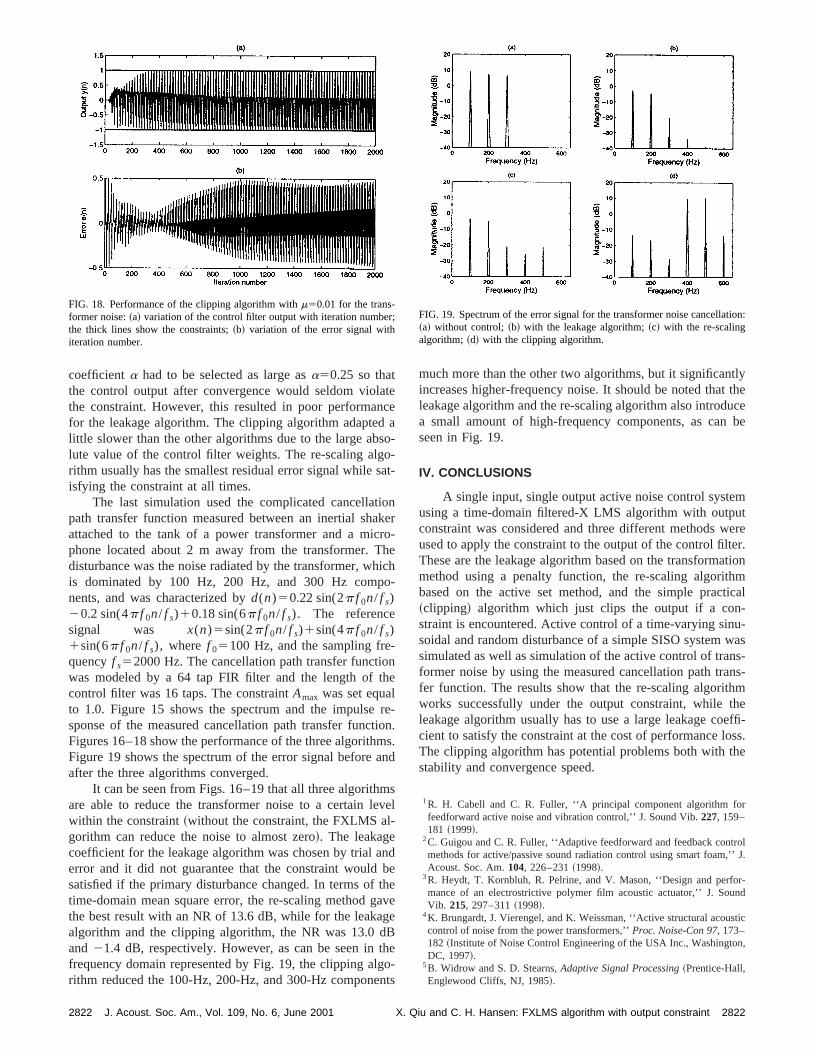
The last simulation used the complicated cancellatpath transfer function measured between an inertial shattached to the tank of a power transformer and a micphone located about 2 m away from the transformer. Tdisturbance was the noise radiated by the transformer, wis dominated by 100 Hz, 200 Hz, and 300 Hz compnents, and was characterized byd(n)50.22 sin(2p f 0n/ f s)20.2 sin(4p f 0n/ f s)10.18 sin(6p f 0n/ f s). The referencesignal was x(n)5sin(2p f 0n/ f s)1sin(4p f 0n/ f s)1sin(6p f 0n/ f s), where f 05100 Hz, and the sampling frequencyf s52000 Hz. The cancellation path transfer functiwas modeled by a 64 tap FIR filter and the length ofcontrol filter was 16 taps. The constraintAmax was set equato 1.0. Figure 15 shows the spectrum and the impulsesponse of the measured cancellation path transfer funcFigures 16–18 show the performance of the three algorithFigure 19 shows the spectrum of the error signal beforeafter the three algorithms converged.
It can be seen from Figs. 16–19 that all three algorithare able to reduce the transformer noise to a certain lwithin the constraint~without the constraint, the FXLMS algorithm can reduce the noise to almost zero!. The leakagecoefficient for the leakage algorithm was chosen by trial aerror and it did not guarantee that the constraint wouldsatisfied if the primary disturbance changed. In terms oftime-domain mean square error, the re-scaling method gthe best result with an NR of 13.6 dB, while for the leakaalgorithm and the clipping algorithm, the NR was 13.0 dand 21.4 dB, respectively. However, as can be seen infrequency domain represented by Fig. 19, the clipping alrithm reduced the 100-Hz, 200-Hz, and 300-Hz compone
FIG. 18. Performance of the clipping algorithm withm50.01 for the trans-former noise:~a! variation of the control filter output with iteration numbethe thick lines show the constraints;~b! variation of the error signal withiteration number.
2822 J. Acoust. Soc. Am., Vol. 109, No. 6, June 2001 X. Q
eea-
-t-
ner-ech-
e
e-n.s.d
sel
deeve
e-
ts
much more than the other two algorithms, but it significanincreases higher-frequency noise. It should be noted thaleakage algorithm and the re-scaling algorithm also introda small amount of high-frequency components, as canseen in Fig. 19.
IV. CONCLUSIONS
A single input, single output active noise control systeusing a time-domain filtered-X LMS algorithm with outpuconstraint was considered and three different methods wused to apply the constraint to the output of the control filtThese are the leakage algorithm based on the transformamethod using a penalty function, the re-scaling algorithbased on the active set method, and the simple prac~clipping! algorithm which just clips the output if a constraint is encountered. Active control of a time-varying sinsoidal and random disturbance of a simple SISO systemsimulated as well as simulation of the active control of traformer noise by using the measured cancellation path trafer function. The results show that the re-scaling algorithworks successfully under the output constraint, whileleakage algorithm usually has to use a large leakage cocient to satisfy the constraint at the cost of performance loThe clipping algorithm has potential problems both with tstability and convergence speed.
1R. H. Cabell and C. R. Fuller, ‘‘A principal component algorithm fofeedforward active noise and vibration control,’’ J. Sound Vib.227, 159–181 ~1999!.
2C. Guigou and C. R. Fuller, ‘‘Adaptive feedforward and feedback contmethods for active/passive sound radiation control using smart foam,Acoust. Soc. Am.104, 226–231~1998!.
3R. Heydt, T. Kornbluh, R. Pelrine, and V. Mason, ‘‘Design and perfomance of an electrostrictive polymer film acoustic actuator,’’ J. SouVib. 215, 297–311~1998!.
4K. Brungardt, J. Vierengel, and K. Weissman, ‘‘Active structural acouscontrol of noise from the power transformers,’’Proc. Noise-Con 97, 173–182 ~Institute of Noise Control Engineering of the USA Inc., WashingtoDC, 1997!.
5B. Widrow and S. D. Stearns,Adaptive Signal Processing~Prentice-Hall,Englewood Cliffs, NJ, 1985!.
FIG. 19. Spectrum of the error signal for the transformer noise cancellat~a! without control;~b! with the leakage algorithm;~c! with the re-scalingalgorithm; ~d! with the clipping algorithm.
2822iu and C. H. Hansen: FXLMS algorithm with output constraint

s
rd
rd
ys
ic
ort
p-
-
tic
rob-
de in
6S. J. Elliott and P. A. Nelson,Active Control of Sound~Academic, NewYork, 1992!, Chap. 12.
7S. M. Kuo and D. R. Morgan,Active Noise Control Systems—Algorithmand DSP Implementations~Wiley, New York, 1992!, Chap. 3.
8C. H. Hansen and S. D. Snyder,Active Control of Noise and Vibration~E&FN SPON, London, UK, 1997!, Chap. 6.
9S. J. Elliott and C. C. Boucher, ‘‘Interaction between multiple feedforwaactive control system,’’ IEEE Trans. Speech Audio Process.2, 521–530~1994!.
10S. J. Elliott and K. H. Baek, ‘‘Effort constraints in adaptive feedforwacontrol,’’ IEEE Signal Process. Lett.3, 7–9 ~1995!.
11S. D. Snyder, ‘‘Microprocessors for active control: Bigger is not alwaenough,’’ Proceedings of Active 99, 45–63 ~Institute of Noise ControlEngineering of the USA Inc., Washington, DC, 1999!.
12E. Zafiriou and A. L. Marchal, ‘‘Robust stability of quadratic dynam
2823 J. Acoust. Soc. Am., Vol. 109, No. 6, June 2001 X. Q
matrix method with hard output constraints,’’ Technical research repTR91-2, Systems Research Center, University of Maryland~1991!.
13R. Fletcher,Practical Methods of Optimization, Vol. 2, Constrained Otimization ~Wiley, New York, 1981!.
14P. E. Gill and W. Murray,Numerical Methods for Constrained Optimization ~Academic, New York, 1974!, p. 165.
15R. J. Vanderbei,Linear Programming: Foundations and Extensions~Klu-wer Academic, Boston, 1997!, p. 315.
16J. J. More and G. Toraldo, ‘‘Algorithms for bound constrained quadraprogramming problems,’’ Numer. Math.55, 377–400~1989!.
17A. Dax, ‘‘On computational aspects of bounded linear least squares plems,’’ ACM Trans. Math. Softw.17, 64–73~1991!.
18I. S. Kim, H. S. Na, K. J. Kim, and Y. Park, ‘‘Constraint filtered-X anfiltered-U least-mean square algorithms for the active control of noisducts,’’ J. Acoust. Soc. Am.95, 3379–3389~1994!.
2823iu and C. H. Hansen: FXLMS algorithm with output constraint




















