A New Approach for Automatic Test Pattern Generation in Register Transfer Level Circuits
8
1 Abstract—In this paper, we propose an approach to generate high-level test patterns from the arithmetic model of an RTL circuit using a hybrid canonical data structure based on a decision diagram. High-level simplified and fast symbolic path activation strategy as well as input justification is combined with test pattern generation for circuits under consideration. The current approach has been implemented for a range of small to large benchmark circuits. The results clearly demonstrate that tests generated using the proposed method have achieved high fault coverage for known sequential circuit benchmarks in very short CPU time and minimum memory usage. Index Terms— Automatic Testing, Canonical Representation, Test Pattern Generation, RTL Circuits. I. INTRODUCTION IGH fault coverage achievement has traditionally been the main objective of the test development techniques. As these techniques have matured and this objective has been attained, other objectives have become important. Decreasing test generation and application time as well as test data volume are among other such objectives being pursued. Although, design flow is moving toward higher levels of abstraction, automatic test pattern generation (ATPG) and also design-for-testability (DFT) tools are based on gate- level techniques. The use of DFT features, such as scan and built-in-self-test, further exacerbates the problem. In order to improve this problem, several ATPG approaches have been proposed for detecting functional faults. It is shown test generation is non-polynomial (NP-complete) [1]. However, observations show that the test generation complexity of practically encountered combinational circuits is polynomial [2]. Also, different techniques for solving the problem of generating tests for functional faults have been proposed. For simplification of test procedure some ATPG approaches have been introduced based on Binary Decision Diagram (BDD) tools [3]. Since these methods require the design to be flattened into the bit level, they cannot be used to deal with large industrial benchmarks efficiently, either in terms of memory or run time. Evolutionary algorithmic methods used in [4-6] are better than the fully random-based method used in state- of-the-art ATPG approaches. However, they are not very robust methods for generation of test vectors to achieve highest coverage. Although these methods can get good coverage in small and medium designs, their random nature made these methods so poor in large circuits where the number of inputs and registers and flipflops increases drastically. In [7, 8] we proposed a method based on a hybrid Boolean-word level canonical representation named Horner Expansion Diagram (HED) [9] to alleviate the above mentioned problems by generating high level test vectors for combinational data paths and control parts. In this paper, we show our polynomial based approach in order to demonstrate robustness of this method for applying it to register-transfer-level (RTL) circuits as an automatic modeling and test generation methodology. As illustrated in Fig. 1, we obtain a Finite State Machine with Datapath (FSMD) model [10] from the RTL code which helps us to extract the transition and output polynomial functions (Section III). A fault model at the behavioral level of abstraction is defined. Following the proposed polynomial model, a process that is similar to the time frame expansion is presented which facilitates handling of fault propagation as well as justification phases to generate test patterns at a higher level of abstraction (Section IV). Finally, by considering generated high-level test patterns as constraints and passing them to a SMT-solver we are able to automatically and efficiently generate gate-level test patterns. Then a commercial gate-level fault simulator is used to estimate gate-level fault coverage. Experimental results show robustness and reliability of our method compared to other approaches in terms of gate-level fault coverage percentage and CPU time. The rest of this paper is organized as follows. In Section II, canonical data structure named Horner Expansion Diagram is introduced to represent polynomials in test generation process. Following the A New Approach for Automatic Test Pattern Generation in Register Transfer Level Circuits Mohammad Mirzaei*, Mahmoud Tabandeh*, Bijan Alizadeh**, Zainalabedin Navabi** M. Mirzaei and M. Tabandeh are with the Department of Electrical Engineering, Sharif University of Technology, Tehran, Iran (E-mail: [email protected]; [email protected]). ** B. Alizadeh and Z. Navabi are with the Department of Electrical and Computer Engineering, University of Tehran, Tehran, Iran (E-mail: [email protected]; [email protected]). H
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of A New Approach for Automatic Test Pattern Generation in Register Transfer Level Circuits

1
Abstract—In this paper, we propose an approach to
generate high-level test patterns from the arithmetic model
of an RTL circuit using a hybrid canonical data structure
based on a decision diagram. High-level simplified and fast
symbolic path activation strategy as well as input
justification is combined with test pattern generation for
circuits under consideration. The current approach has
been implemented for a range of small to large benchmark
circuits. The results clearly demonstrate that tests
generated using the proposed method have achieved high
fault coverage for known sequential circuit benchmarks in
very short CPU time and minimum memory usage.
Index Terms— Automatic Testing, Canonical
Representation, Test Pattern Generation, RTL Circuits.
I. INTRODUCTION
IGH fault coverage achievement has traditionally
been the main objective of the test development
techniques. As these techniques have matured and this
objective has been attained, other objectives have
become important. Decreasing test generation and
application time as well as test data volume are among
other such objectives being pursued. Although, design
flow is moving toward higher levels of abstraction,
automatic test pattern generation (ATPG) and also
design-for-testability (DFT) tools are based on gate-
level techniques. The use of DFT features, such as scan
and built-in-self-test, further exacerbates the problem.
In order to improve this problem, several ATPG
approaches have been proposed for detecting functional
faults. It is shown test generation is non-polynomial
(NP-complete) [1]. However, observations show that
the test generation complexity of practically encountered
combinational circuits is polynomial [2]. Also, different
techniques for solving the problem of generating tests
for functional faults have been proposed.
For simplification of test procedure some ATPG
approaches have been introduced based on Binary
Decision Diagram (BDD) tools [3]. Since these methods
require the design to be flattened into the bit level, they
cannot be used to deal with large industrial benchmarks
efficiently, either in terms of memory or run time.
Evolutionary algorithmic methods used in [4-6] are
better than the fully random-based method used in state-
of-the-art ATPG approaches. However, they are not
very robust methods for generation of test vectors to
achieve highest coverage. Although these methods can
get good coverage in small and medium designs, their
random nature made these methods so poor in large
circuits where the number of inputs and registers and
flipflops increases drastically.
In [7, 8] we proposed a method based on a hybrid
Boolean-word level canonical representation named
Horner Expansion Diagram (HED) [9] to alleviate the
above mentioned problems by generating high level test
vectors for combinational data paths and control parts.
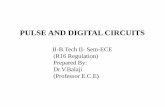
In this paper, we show our polynomial based
approach in order to demonstrate robustness of this
method for applying it to register-transfer-level (RTL)
circuits as an automatic modeling and test generation
methodology. As illustrated in Fig. 1, we obtain a Finite
State Machine with Datapath (FSMD) model [10] from
the RTL code which helps us to extract the transition
and output polynomial functions (Section III). A fault
model at the behavioral level of abstraction is defined.
Following the proposed polynomial model, a process
that is similar to the time frame expansion is presented
which facilitates handling of fault propagation as well as
justification phases to generate test patterns at a higher
level of abstraction (Section IV). Finally, by considering
generated high-level test patterns as constraints and
passing them to a SMT-solver we are able to
automatically and efficiently generate gate-level test
patterns. Then a commercial gate-level fault simulator is
used to estimate gate-level fault coverage. Experimental
results show robustness and reliability of our method
compared to other approaches in terms of gate-level
fault coverage percentage and CPU time.
The rest of this paper is organized as follows. In
Section II, canonical data structure named Horner
Expansion Diagram is introduced to represent
polynomials in test generation process. Following the
A New Approach for Automatic Test Pattern
Generation in Register Transfer Level Circuits
Mohammad Mirzaei*, Mahmoud Tabandeh*, Bijan Alizadeh**, Zainalabedin Navabi**
M. Mirzaei and M. Tabandeh are with the Department of Electrical Engineering, Sharif University of Technology, Tehran, Iran
(E-mail: [email protected]; [email protected]).
** B. Alizadeh and Z. Navabi are with the Department of Electrical and Computer Engineering, University of Tehran, Tehran, Iran
(E-mail: [email protected]; [email protected]).
H

2
proposed representation structure, we present a method
of obtaining set of polynomials to make a formal model
of an RTL circuit to extract the transition and output
polynomial functions in Section III. High-level test
pattern generation approach and conversion of patterns
to gate-level ones is demonstrated in Section IV in order
to estimate gate-level fault coverage. Experimental setup
and results and a brief conclusion are given in Sections
V and VI, respectively.
Fault Injection
Propagation/
Justification
SMT-Solver
Polynomial
Extraction
HED
Representation
High-level Test
Genration
Gate-level Test
Pattern
FSMD
Extrraction
Gate-level
NetlistRTL Description
Fault Simulator
Fig. 1 RTL automatic modeling and test generation methodology
II. HYBRID CANONICAL REPRESENTATION
In this section we introduce our graph-based
representation structure called HED [9] for functions
with a mixed Boolean and integer domain to integer
range for representing arithmetic operations at a high
level of abstraction. In HED, functions to be represented
are maintained as a single ordered, normalized and
reduced graph in strongly canonical form.
HED is a binary graph-based representation which
supports polynomial function by factorizing higher
orders of Taylor series expansion recursively as shown
in (1), where const is independent of variable X, while
linear is coefficient of variable X.
F(X,…)=F(X=0,…)+X×[F’(X=0,…)+…]=const+X×linear (1)
Definition 1: HED is a directed acyclic graph
G = (VR, ED) with vertex set VR and edge set ED.
While the vertex set VR consists of two types of
vertices: Constant (C) and Variable (V). The edge set
only indicates integer values as weight attribute. A
Constant node v has as its attribute a value val(v)Z. A
Variable node v has as attributes a variable var(v) and
two children const(v) and linear(v){V,C}.
According to the above definition, a vertex v in the
HED denotes an integer function fv that has been defined
recursively as follows:
1) If vC (is a Constant node), then fv=val(v).
2) If vV (is a Variable node), then fv=const(v)+
val(v)×linear(v).
To normalize the weights, any common factor is
extracted by taking the greatest common divisor (GCD)
of the argument weights. In addition, we adopt the
convention that the sign of the extracted weight matches
that of the const part. This assumes that GCD always
returns a nonnegative value. As long as all vertices are
created, the graph will remain in canonical form.
Example 1: Fig. 2 illustrates how f(X,Y,Z)=24-8×Z+
12×Y×Z-6×X2-6×X2×Z is represented by HED.
Let the ordering of variables be X>Y>Z. First, the
decomposition with respect to variable X is taken into
account. As shown in Fig. 2(a), after rewriting f(X,Y,Z)
based on (1), const and linear parts will be (24–8×Z+
12×Y×Z) and (-6×X–6×X×Z). The linear part is
decomposed with respect to variable X again due to X2
term. After that, the decomposition is performed with
respect to variable Y. By rewriting 24–8×Z+12×Y×Z=
(24–8×Z)+Y×(12×Z), it can be determined that the
const and linear parts of the left hand side Y node in Fig.
2(b) are 24–8×Z and 12×Z. Finally, the expressions are
decomposed with respect to variable Z and a reduced
diagram is obtained. To reduce the size of an HED,
redundant nodes are removed and isomorphic sub-
graphs are merged. For this purpose, the GCD of the
argument weights are taken to figure out isomorphic
subgraphs as well as redundant nodes. In Fig. 2(b),
24−8×Z, 12×Z, and −6−6×Z are rewritten by
8×[3+Z×(−1)], 12×[0+Z×(1)], and −6×[1+Z×(1)]. In
order to normalize the weights, GCD(8, 12) = 4 and
GCD(0,−6) = +6 are taken to extract common factors.
Finally, Fig. 2(c) shows the normalized graph where
GCD(4,−6) = 2 is taken to extract common factor
between outgoing edges from X node. In this
representation, dashed and solid lines indicate const and
linear parts, respectively. Note that, in order to have a
simpler graph, paths to 0-terminal have not been drawn
in Fig. 2(c).
(b)
Fig. 2 HED Representation of 24-8×Z+12×Y×Z-6×X2-6×X2×Z
X
24-8Z+12YZ -6X-6XZ
X
Y X
24-8Z 12Z -6-6Z 0
(a)
(c)
X
Y X
Z Z -1
3
2
1
3
Z
-1
-1
2
3 2
1
1

3
In this representation, basic arithmetic operators such
as adders, subtractors, multipliers, divisors, shifters, and
multiplexers are available that work for symbolic integer
variables. In order to represent Boolean functions,
logical bitwise operations including NOT, AND, and
OR have been provided [9].
III. POLYNOMIAL MODEL OF RTL CIRCUITS
In this section, we introduce a formal model for
describing RTL circuits. Polynomial Model of an RTL
circuit is a set of algebraic functions that describe a
given circuit based on its datapath or a finite state
machine with datapath (FSMD) model. The FSMD is
formally defined by a universal specification model,
proposed in [10], that can represent all hardware
designs. The objective of defining the FSMD model is to
save considerable front-end implementation effort since
translating from RTL to an FSMD is a well-known
synthesis-like process.
Definition 2: An FSMD is defined as an octet
M = f (PI,S,V,PO,U,AR,trans,func), where:
1) PI is the set of primary input signals
2) S is the finite set of control states
3) V is the set of storage variables
4) PO is the set of primary output signals
5)U={xe|x(POV) and eE} represents a set of
storage or output assignments and E={g(p,q,r,…)|
p,q,r,…(PIV)} represents a set of arithmetic
expressions of input and storage variables over PIV
6) AR={R(a,b)|a,bE; and R is any arithmetic relation}
represents a set of status signals as arithmetic relations
between two expressions.
7) trans: S×AR→S, is the state transition function.
8) func: S×AR→U, is the update function of the output
and the storage variables.
The state transition function, trans, is a high-level
expression which describes the next state variables with
respect to the present state and the primary input signals.
This function is modeled by a polynomial function so
that it can be easily represented with a decision diagram.
When we need to traverse the FSMD from primary
outputs to primary inputs, a pre-image computation is
necessary in order to compute which previous state is
reachable from a given present state. To do so, the next
state variable in the polynomial model is replaced by the
related value. Finally a simple polynomial equation
should be solved to find out the values of the present
state and primary input signals. Also, trans and func
functions should be expressed based on a set of
polynomial functions. For this purpose, each state SkS
is encoded by a polynomial Pn(PS,k) defined as follows.
Definition 3: Consider an FSMD which has n states,
S=(S0,S1,…,Sn-1). If one-hot encoding is used, each
present state PS≡SkS (0≤k≤n-1) can be described as a
polynomial Pn(PS,k) in (2). In other words, after
replacing PS in (2) by 2k, Pn(PS,k) is computed as 1 and
therefore we say that Pn(PS,k) represents the present
state Sk . If PS is replaced by 2m(0≤m≤n-1,m≠k), then
zero value for (PS-2m) in (2) will result Pn(PS,k)=0.
)2(
)22(
)2(
),(:)(1
0
1
0 kiwhere
PS
kPSSPSn
i
ik
n
i
i
nk P
According to the concept of definition 3, expression
of the transition function trans(PS, PI) as well as output
function func(PS, PI) are expressed in a summation of
polynomial functions as equated in (3) and (4), where
ft(PS,PI,k):S×PI×AR→U, fo(PS,PI,k):S×PI×AR→U
show operations in each state of the FSMD to generate
next state and output functions, respectively.
)4(),,(),(),(
)3(),,(),(),(
1
0
1
0
n
kn
n
kn
kPIPSfokPSPIPSfunc
kPIPSftkPSPIPStrans
P
P
Example 2: Consider the schematic depicted in Fig. 3,
the FSMD of which is shown in Fig. 4. To describe the
transition function trans and output function func in
terms of the present state PS and primary input PI, each
state is encoded based on an initial state. State diagram
of this state-machine is shown in Fig. 4. Based on
definition 3, each state has a one-hot code such as reset
for the initial state encoded by 1(0001), and sA, sB and
sC are encoded by 2(0010), 4(0100) and 8(1000),
respectively. Furthermore, by definition 2, we can
extract PI, S, V, PO, E, U, and AR, separately. Primary
inputs and outputs of a circuit can be found from port
declaration in the circuit’s description. Thus, we can
easily extract these parts, whereby, PI={X,Y,Z,c1,c2,i},
PO={SC_O} and S={reset,sA,sB,sC}. Moreover, we can
find storage variables which are temporary variables and
signals in the design as the set V={T,T1,T2,T4,T4,T5}.
Set of arithmetic expressions over primary input and
storage variables can be considered as E={X+Y,X–
Y,T3×Z, T3+Z}. Hence, U={T1:=X+Y,T2:=X–
Y,T4:=T3×Z, T5:=T3+Z} will be the set of storage and
output assignments. Furthermore, the set of status
signals and conditions as arithmetic relations between
two expressions can be considered as AR={(c1=0)OR
(c1=1),(c2=0)OR(c2=1),(i=0)OR(i=1)}. Now we can
compute func function as illustrated in equations (5)-
(11). It should be noted that T and Ti (1≤i≤5) in these
equations are temporary variables, i.e., based on
definition 2, they should be described as polynomial
functions as well.

4
+
-
-
X
Y
Z
C
c1
c2
i
x
clock
Reg_A
Reg_B
Reg_C
>
Mux1
Mux3
ADD
MUL
SUB1
SUB2>
>
out
Mux2
t0t0-1t0-2
Fig. 3 Schematic circuit of FSMD circuit - Example 2
Also, trans function is computed as illustrated in
equation (11). According to each present state defined
by Pn(PS,k), it is only necessary to determine the
appropriate next state value as ft part of equation. For
example, the third term in (12), i.e.,
Pn(PS,4)×[8×(i)+4×(1-i)], indicates that if the state
machine is in state sB (encoded by 4), the next state
depends on input i. If i=1, then sB has a transition to sC
(encoded by 8) and the result is 8. Otherwise, the result
will be 4 that indicates the next state will be sB (encoded
by 4).
)8()11()(1)(
34
)7()11()(1)(
)11(2113
)6(2
)5(1
cZYXcZYX
ZTT
cYXcYX
cTcTT
YXT
YXT
)11(})22)(22)(22(
)2)(2)(2(
),(_{
)10(22)11()(
21)()21()11(
)()21(1)(
25)21(4
)9()11()(1)(
35
231303
210
TPSPSPS
PIPSOSCfunc
cZccYX
ccYXcc
ZYXccZYX
cTcTT
ZcYXcYX
ZTT
)12()2()22)(22)(22(
)2)(2)(2(
))1(4)(8()22)(22)(22(
)2)(2)(2()4(
)22)(22)(22(
)2)(2)(2(
)2()22)(22)(22(
)2)(2)(2()},,(
)22(
)2(
{
)},,(),({),(
231303
210
321202
310
312101
320
302010
321
3
,0
3
,03
0
3
0
PSPSPS
iiPSPSPSPSPSPS
PSPSPSKPIPSftrans
PS
KPIPSftransKPSPPIPStrans
kii
ik
kii
i
k
n
k
In this example we utilized a one-hot encoding method to
express the state machine with respect to the state variables.
It should be noted that other encoding techniques such as
gray encoding or integer encoding can easily be used as
well. For example, to use integer encoding, variables will
be rest=”00”=0, sA="01"=1, sB="10"=sA+1 and
sC="11"=sA+2. Although the polynomials for the next state
and output functions obtained from integer encoding
method are similar to those of the one-hot encoding
method, the processing time to compute the coefficients in
integer encoding is less than that of one-hot encoding.
Fig. 4 State diagram of FSMD circuit - Example 2
IV. HIGH LEVEL TEST GENERATION
1. High-level Fault Injection
After representing RTL circuits with algebraic
equations, in order to complete test generation procedure
we obtain a set of high-level test sequences using
various coverage metrics. The key point that has to be
appreciated in this decomposition is that linear part
indicates under what conditions the function will be
dependent on the related variable (see (1)). Now
suppose the top variable is a faulty variable named
FAULT as shown in (13), so linear portion expresses
conditions that cause the FAULT variable to be
observed at the output. This property completely covers
path sensitization, while no computation needs to be
performed.
f (FAULT, …) = const + FAULT × linear (13)
Obviously, the const part is equivalent to the fault-
free behavior, while linear is exploited as a set of test
vectors which are formally represented. Indeed, HED
representation has an inherent property of automatically
separating fault-free behavior from the faulty part of a
faulty design. We will point out how this property helps
us generating test vectors from the faulty specification.
2. High-level Test pattern Extraction
In contrast to other approaches of test generation, it
is not necessary to perform justification/propagation
phase, because HED is able to express primary outputs
in terms of primary inputs. If we can find some
conditions that reach the specified fault to one of the
primary outputs, according to the above-mentioned
if (c2) then SC_O=T3×Z
else SC_O=T3 - Z
SC_O=0
8
2
i=1
if (c1) then T3=X+Y
else T3=X-Y
sC
sA sB
4
SC_O=0
reset
1
SC_O=0
i=0

5
property, we have already fulfilled path sensitization as
well as justification phases all together. It should be
noted that if fault propagation needs to go through
storage variables, our method tries to symbolically
manipulate the transition function instead of duplicating
the circuit by applying time-frame expansion. In our
proposed high-level test generation behavioral
specifications (BS) in HDL as well as a fault list (FL)
are treated as inputs to the algorithm. Each fault in the
FL is characterized by the name of the affected signal,
the line of behavioral model, and the type of stuck-at
fault. We define a fault model that comprises two kinds
of faults: (1) bit failure including stuck-at less than (-
FAULT) and stuck-at greater than (+FAULT) the fault-
free value, (2) condition failure indicates that each
condition can be stuck-at true (causing to remove else
execution path) or stuck-at false (causing to remove then
execution path). It is worth noting that such a fault
model provides a good correlation with gate-level fault
models, i.e., stuck-at zero and one, while allowing a
faster and simpler analysis than gate-level approaches.
The test generation algorithm starts by selecting and
then injecting a fault into the behavioral specification
(BS). To do so, a variable FAULT is added to
(subtracted from) the fault-free symbolic value of the
related signal. After that, the highest order of variables
is set to the FAULT due to beneficial property of HED
representation discussed earlier. Finally during HED
representation of different outputs, they are checked to
see whether the linear child of FAULT variable is not
zero. As soon as we can find such an output, the
algorithm has succeeded to detect the fault. Hence the
linear child of variable FAULT is returned as a set of
test vectors that are formally represented in HED,
otherwise the fault is undetectable.
Example 3: Consider Example 2 again. The stuck-at
greater than faults (FAULT1, FAULT2, FAULT3 and
FAULT4), have been injected in ADD(X+Y), SUB(X-
Y), MULT(C×Z) and SUB(C-Z) operators. Fig. 5(a)
illustrates HED representation of the func variable as a
primary output in this example. The coefficients of
FAULTi(1≤i≤4) variables, i.e., linear child, express
conditions under which the specified fault can be
observed at the output func. It should be noted that the
const child of FAULT4 variable represents the fault-free
behavior of the circuit for this fault. Let the variable
ordering be FAULT1>FAULT2>FAULT3>FAULT4>
X>Y>Z>c1>c2>PS. After writing symbolic value of
func in terms of primary inputs and present state, (15),
replacing T3 from (14), we obtain (15).
)15(}42)3(()3)21(3{(
)22)(22)(22(
)2)(2)(2(
)14()11()2(1)1(3
231303
210
FAULTcZTFAULTcZT
PSPSPSfunc
cFAULTYXcFAULTYXT
func = FAULT1×(TP1)+FAULT2×(TP2)+FAULT3×(TP3)+ FAULT4× (TP4) + FFB (16)
In (16), TPi and FFB stand for TestPattern for
FAULTi and FaultFreeBehavior in func, respectively
and they are:
]21[)22)(22)(22(
)2)(2)(2(4
]2[)22)(22)(22(
)2)(2)(2(3
)]21()11(2)11[([)22)(22)(22(
)2)(2)(2(2
)]21(121[)22)(22)(22(
)2)(2)(2(1
231303
210
231303
210
231303
210
231303
210
cPSPSPS
TP
cPSPSPS
TP
ccccZPSPSPS
TP
ccccZPSPSPS
TP
)}21()]21(21[)]21(21))21(
)11(2)11(([{)22)(22)(22(
)2)(2)(2(231303
210
cZcccZYcccZc
cccZYXPSPSPS
FFB
The stuck-at zero and one faults (FAULT5 and
FAULT6) for input variable i have been injected into
trans. Let the variable ordering be FAULT5>FAULT6>
i>PS. We first describe the polynomial function of trans
in (17). Fig. 5(b) illustrates the HED representation of
trans according to (18), where TP5, TP6, and FIP_ns
stand for TestPattern for FAULT5, FAULT6, and
FaultIndependent-Part, respectively, and their equations
are given in (19). The coefficients of FAULT5 and
FAULT6 variables express conditions under which the
state machine has an incorrect transition.
)17()2()22)(22)(22(
)2)(2)(2(
)]1)(64())(58[()22)(22)(22(
)2)(2)(2(
)4()22)(22)(22(
)2)(2)(2()2(
)22)(22)(22(
)2)(2)(2(
231303
210
321202
310
312101
320
302010
321
PSPSPS
iFAULTiFAULTPSPSPS
PSPSPSPSPSPStrans
trans = FAULT5×(TP5) + FAULT6×(TP6) + FIP_ns (18)
)1()22)(22)(22(
)2)(2)(2(6
)()22)(22)(22(
)2)(2)(2(5
321202
310
321202
310
iPSPSPS
TP
iPSPSPS
TP
)19()2()22)(22)(22(
)2)(2)(2()]1(4)(8(
)22)(22)(22(
)2)(2)(2(
)4()22)(22)(22(
)2)(2)(2()2(
)22)(22)(22(
)2)(2)(2(_
231303
210
321202
310
312101
320
302010
321
PSPSPSii
PSPSPS
PSPSPSPSPSPSnsFIP
TP5 indicates that if the input variable i becomes 1,
while the present state is PS=4 (sB in Fig. 4), stuck-at-
zero on i will be detectable due to having a transition to
PS=4 instead of PS=8 (sC in Fig. 4). Each TPi in (16)

6
and (18) indicates that the injected faults will be
detected if at least one condition can be satisfied.
Otherwise, TPi becomes 0 and, therefore, that fault will
be undetectable.
Fig. 5 HED Fault Representation - Example 3
3. Gate-level Coverage Computation
Although functional tests generated at the behavioral
level are effective in traversing through much of the
control space of a digital circuit, exercising all values of
variables is not possible due to the large number of
possible values. Hence, for testing arithmetic operators,
a gate-level approach may be more effective in finding
values that exercise potential faults. We employ a gate
level ATPG to generate a test pattern targeting structural
faults in the corresponding functional unit. We use
functional methods based on the pre-image computation
techniques to compute justification sequences. We
assume that every FSMD has an initial state, and pre-
image computation is continued until the initial state is
reached. Note that we do not assume that the circuits
have synchronizing sequences. According to conditions
generated for this fault, we assign some values to the
related variables in each time slice to generate a
sequence of gate-level test vectors. Although we utilize
a PODEM-like algorithm, any other gate-level test
pattern generation algorithms can be applied. Moreover,
instead of using ATPG tools, we are able to take
advantage of SMT Solvers to solve a list of equations
extracted from the high-level test patterns [12].
Example 4: Consider behavioral test pattern TP1,
generated for FAULT1 in example 3. This test shows
that in order to detect fault behavior in ADD operation
which provides X+Y, it should satisfy one of the
following conditions:
1- (c1)≠0,(c2)≠0,(Z)≠0, and ((PS-1)(PS-2)(PS-4))≠0
2- (c1)≠0,(1-c2)≠0, and ((PS-1)(PS-2)(PS-4))≠0
According to Fig. 3 which depicted an RTL
schematic of the FSMD in Example 2, to extract gate-
level tests for condition 1, variables c1 and c2 should be
set to one and variable Z to a non-zero value at time
slice t0, while the state machine should be reached to a
state where (PS-1)(PS-2)(PS-4) ≠ 0. On the other hand,
according to the state encoding described in Section III,
(PS-1)(PS-2)(PS-4) ≠ 0 will be satisfied if PS is set to 8,
i.e., sC state in Fig. 4. On the other hand, in order to
reach this state from the initial state sA, we need to
recursively apply the pre-image computation to the state
transition function until the initial state, i.e., sA, is
reached. Therefore, to propagate FAULT1 to the primary
output func, at time slice t0+1, variables c2 and Z should
be set to one and a nonzero value, respectively, at time
slice t0. This way, Reg_C=Reg_b×Z is computed by the
MUL unit in Fig. 3. After doing the first pre-image
computation, the present state sB (Reg_B in Fig. 3) is
reached where the primary input i, i.e., the select bit of
Mux2, should be set to one at time slice t0−1. Performing
the second pre-image computation gets us to the initial
state sA while variable c1 should be set to one at time
slice t0−2. It causes the ADDER unit, the faulty
operation, computes Reg_A=X+Y. In this example, since
there is no constraint on X and Y variables, all
combinations of their values are applied to the ADDER
unit when the conditions for different time slices are
fixed. Note that, in contrast to the conventional methods
of sequential circuit test generation, in our method it is
not necessary to have different copies of a circuit for
different time slices as time frames.
V. EXPERIMENTAL SETUP AND RESULTS
In this section we report some experimental results
that show the robustness of the HED based test
generation compared to other methods. We have
implemented the algorithms in C++ and carried out on
an Intel® 933 MHz Processor and 256 MB of memory
running Windows XP. The effectiveness of the proposed
-16
26
-1
-11
1
trans
FAULT5
Next-State
Fault-Free
Behavior
i
FAULT6
i
PS
PS
PS
(b)
-1
FAULT1
TestPattern
(TP1)
func
Z
-1
FAULT1
c1
c2
-1
c1
c2
FAULT2
Z
c1
c2
c1
c2
-1
FAULT3
FAULT4
Fault-Free
Behavior
-8
(a) 1
PS
-7
14
PS
PS

7
approach has been evaluated on 1999 International Test
Conference VHDL benchmarks [13]. General
information about the benchmark circuits are given in
Table I. Column VHDL Spec provides the number of
lines in RTL representations. In columns GATE Level
Spec, an idea about size of the circuits, number of
primary inputs (PI), primary outputs (PO),
combinational gates (CG), flip-flops (FF), total faults
(TF), and collapsed faults (CF) are given. Experimental
results have been compared with ARTIST [4], ARPIA
[5] and RAGE99 [6] which are behavioral RTL ATPG
tools based on evolutionary and genetic algorithm.
ARTIST and RAGE99 were run on a Sun Ultra 5
running at 333 MHz with 256 MB of memory and
ARPIA was run on a Sun Enterprise 250 running at 400
MHz and equipped with 2 GB of memory. In order to
represent a design in HED, first of all we utilize GAUT
[11] as a high-level synthesis tool to obtain the FSMD
model of the design. After that, the data path and
controller parts of the design are represented in HED
based on the polynomial model defined in section III.
Table II reports the results of running HED package
for each benchmark. For this purpose, based on
statement and path coverage metrics, different high-level
faults are taken into account. Time, memory usage,
number of equations, and the number of variables
needed to generate high-level test patterns have been
reported in columns Time in seconds, Memory in
Mbytes, #EQ, and #Var respectively.
Test patterns generated by HED are simulated at the
gate level when the stuck-at faults are considered. Table
III summarizes the results of our method in comparison
with ARTIST, ARPIA and RAGE99. In this table,
columns F.C. and Time indicate the fault coverage and
the CPU time required by fault simulator to report the
related fault coverage. Although column #Test shows
the number of test vectors reported by methods in Table
III, this information was not accessible for ARPIA
approach.
Although HED package was run on Windows XP
and other methods were run on Sun platforms, in order
to have a fair comparison of their processing times we
have used the benchmarks in [14] which evaluate the
performance of different platforms. It is reported in [14]
that an Intel® 933 MHz processor running Windows XP
is about two times faster than other platforms mentioned
in this paper. For example, in circuit b05, ARTIST
achieved 33,393 seconds, ARPIA achieved 1,932.2
seconds and RAGE99 achieved 2,583.2 seconds, while
our method achieved 97.3 seconds which needs to be
multiplied by 2 since our platform is almost two times
faster than other platforms. Obviously, the run times
(columns Time in Table III) for test generation using
HED for all circuits reported in our experiment, are
almost two orders of magnitude lower than those of
reported using other methods. Therefore this gives us
ways to use the proposed approach to get coverage
driven high level test generation ability within practical
time.
VI. SUMMARY AND CONCLUSION
An arithmetic approach for modeling RTL circuits
with polynomial expressions using a hybrid canonical
data structure based on a decision diagram is introduced
in this paper. Models were modified to generate test
patterns at the behavioral level. Fault coverage at the
logic level is computed by converting the high level test
vectors to gate-level test patterns and applying them to
the related logic circuits. We have applied our approach
to some standard benchmarks which include Boolean
logic expressions as well as arithmetic expressions.
Experimental results show the efficiency of our method
even on large industrial circuits. A possible avenue for
future work would be to apply this method for inserting
optimal test points in the circuit in order to use it for
design for testability.
TABLE I
BENCHMARK CHARACTERISTICS FOR HED-BASED APPROACH
Bench-
mark
VHDL
Spec. GATE LEVEL Spec.
#lines #PI #PO #CG #FF #TF #CF
b01 110 2 2 49 5 260 114
b02 70 1 1 28 4 148 62
b03 141 4 4 160 30 872 386
b04 102 11 8 737 66 4,102 1,646
b05 332 1 36 998 34 5,732 2,440
b11 118 7 6 770 31 4,332 1,726
b12 569 5 6 1,076 121 6,306 2,856
b13 296 10 10 362 53 1,906 830
b14 509 32 54 10,098 245 58,348 22,634
b15 671 36 70 8,922 449 53,018 21,776
TABLE II
HED REPRESENTATION
Benchmark Time
(mSec)
Memory
(Mbytes) # EQ # Var
b01 120 0.25 36 55
b02 100 0.18 21 29
b03 80 0.15 43 93
b04 50 0.14 17 40
b05 100 0.22 39 71
b11 70 0.18 80 85
b12 110 0.28 167 227
b13 100 0.25 113 187
b14 190 0.33 179 253
b15 210 0.38 267 326

8
References
[1] P.Goel, “Test generation costs analysis and projections”, in Proc.
17th DAC, pp. 77-84, June 1980.
[2] M.R.Prasad, et.al., “Why is ATPG easy?”, in Proc. 36th DAC,
pp. 22-28, June 1999.
[3] M.K.Ganai, et.al., “Enhancing Simulation with BDDs and
ATPGs”, in Proc. of Design Automation Conference (DAC), pp.
385-390, 1999.
[4] F.Corno, et.al., “ITC’99 benchmarks and First ATPG Results”,
IEEE Design & Test of computers, Vol. 17, No. 3, pp. 44-53,
July-September 2000.
[5] G.Cumani, “High-Level Test of Electronic Systems”, PhD thesis,
Politecnico di Torino, 2003.
[6] F.Corno, et.al., “High Quality Test Pattern Generation for RT-
level VHDL Descriptions”, MTV99: 2nd Int. Workshop on
Microprocessor Test and Verification Common Challenges and
Solutions, Atlantic City (USA), September 1999.
[7] B.Alizadeh, M.Fujita, “High level test generation without ILP
and SAT Solvers”, in Int. Workshop on High Level Design
Validation and Testing (HLDVT07), pp. 298-304, 2007.
[8] B.Alizadeh, M.Fujita, “Guided gate-level ATPG for sequential
circuits using a high-level test generation approach,” in Proc.
Asia South Pacific-Design Automation Conference (ASP-DAC),
pp. 425–430, 2010.
[9] B.Alizadeh, M.Fujita, “HED: A Canonical and Compact Hybrid
Word-Boolean Representation as a Formal Model for
Hardware/Software Co-designs”, in 4th Int. Workshop on
Constraints in Formal Verification (CFV07), pp. 15-29, 2007.
[10] D. Gajski, et.al., "Introduction to high-level synthesis", in IEEE
Transactions on Design and Test of Computers, pp. 44-54, 1994.
[11] E. Martin, et.al., “GAUT: An architectural synthesis tool for
dedicated signal processors,” in Proceeding European Design
Automation Conference (EURO-DAC), pp. 14–19, 1993.
[12] B.Alizadeh, M.Fujita, “A Hybrid Approach for Equivalence
Checking between System Level and RTL Descriptions”, in Int.
Workshop on Logic and Synthesis (IWLS07), pp. 298-304, 2007.
[13] S.Davidson, ITC99 Benchmarks, 1999. Available:
http://www.cad.polito.it/tools/itc99.html.
[14] J. L. Henning, Standard Performance Evaluation Corporation
(SPEC), 2006. Available: http://www.spec.org/cpu
TABLE III
COMPARING FAULT COVERAGE OF HED METHOD WITH ARTIST, RAGE99 AND ARPIA
Benchmark
ARTIST RAGE99 ARPIA HED
F.C.
(%) #test
Time
(Sec)
F.C.
(%) #test
Time
(Sec)
F.C.
(%) #test
Time
(Sec)
F.C.
(%) #test
Time
(Sec)
b01 100 1,061 4,118 100 259 549.0 100 N.A. 78.8 100 315 77.5
b02 99.33 940 1,731 99.33 114 51.61 99.33 N.A. 39.1 100 175 3.6
b03 74.33 374 5,131 73.48 174 69.36 74.82 N.A. 1,089,9 75.72 146 32.5
b04 89.42 427 6,905 80.18 83 518.4 90.44 N.A. 1,627.8 99.95 107 72.5
b05 33.50 2,800 33,393 40.26 68 2,583.2 33.43 N.A. 1,932.2 89.95 216 97.3
b11 85.98 532 5,092 91.11 1,222 1,741.0 91.14 N.A. 34,837.1 99.95 114 70.1
b12 45.99 5,541 67,575 20.86 155 1,231.7 20.92 N.A. 7,890.2 89.98 756 350.8
b13 68.37 4,538 43,450 84.49 3,303 5,531.4 82.56 N.A. 2,801.8 99.88 896 487.1
b14 79.65 4,743 55,240 79.01 4,597 9,722.9 81.78 N.A. 473,741.9 99.99 1,023 1,172.5
b15 31.96 2,733 60,990 38.11 2,838 11,566.9 32.50 N.A. 590,611.3 79.99 840 1,807.8