A new algorithm for realization of FIR filters using multiple constant multiplications
7
ABSTRACT This paper presents a new common subexpression elimination (CSE) algorithm for the realization of FIR filters based on multiple constant multiplications (MCMs). This algorithm shares the maximum number of partial terms amongst the minimum signed digit (MSD)-represented coefficients. The proposed algorithm modifies the iterated matching (ITM) algorithm to share more partial terms in MCMs and apply it to MSD-represented coefficients. These modifications provide a significant logic and consequently chip area savings. Employing the proposed algorithm yields efficient realizations of FIR filters with fewer adders compared to the conventional CSE algorithms. Experimental results demonstrate that the proposed algorithm can contribute up to a 22% reduction in the complexity of FIR filters over some conventional CSE algorithms. The proposed algorithm also addresses challenges encountered in resource-constrained applications that require banks of high-order filters such as in real-time distributed optical fiber sensor applications. Index Terms—Common subexpression elimination (CSE), finite impulse response (FIR) filter, minimal signed digit (MSD), multiple constant multiplications (MCMs) 1. INTRODUCTION An FIR filter is a linear time invariant system governed by a linear convolution of the input samples with the filter coefficients, as shown in (1). In this equation, C k stands for the filter coefficients, and x[n] and y[n] denote the input and output signals, respectively. [] ∑ [ ] The complexity of implementing FIR filters is mainly dominated by product operations between filter coefficients and input samples as reflected in the transposed structure of the FIR filter in Fig. 1. In recent years, there has been an increasing demand for efficient implementations of FIR filters driven by high accuracy and low power consumption requirements as well as the flexibility of their implementation on hardware platforms such as field programmable gate arrays (FPGAs) or application specific integrated circuits (ASICs). In applications such as distributed optical fiber sensors [1], the use of higher order filters with long bit-width coefficients is necessary, as the specification of filters should be exactly met. An efficient implementation of higher order filters with long bit-width coefficients is a major challenge since there are always tradeoffs concerning accuracy, power consumption, and speed in hardware implementations. Therefore, the realization of FIR filters with a reasonable tradeoff is demanding. As shown in the transposed structure of the FIR filter, the same input sample is multiplied by a set of coefficients at each time. This kind of operation is known as multiple constant multiplications (MCMs) and provides the opportunity to realize FIR filters with a less amount of computational resources. The realization of MCMs is closely related to the substitution of constant multiplications by shift and addition operations. The substitution of multipliers with adders and shift-registers enables significant savings in hardware platform resources as they are more cost-efficient than multipliers. It also enables the utilization of algorithms for the detection of redundancies among constants and sharing of partial terms. In general, algorithms used for realizations of MCMs are categorized into two approaches: graph-dependence (GD) and common subexpression elimination (CSE). The GD approach relies on the graph theory to synthesize the coefficients of a filter with a number of primitive Mohsen Amiri Farahani, Student Member, IEEE, Eduardo Castillo-Guerra, Bruce G. Colpitts, Senior Members, IEEE Department of Electrical and Computer engineering, University of New Brunswick, Canada A New Algorithm for Realization of FIR Filters Using Multiple Constant Multiplications Z -1 + × C N-1 × C N-2 Z -1 + × C N-3 Z -1 + × C 1 × C 0 Z -1 Y[n] X[n] + Fig. 1. Transposed structure of the FIR filter.
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of A new algorithm for realization of FIR filters using multiple constant multiplications

ABSTRACT
This paper presents a new common subexpression
elimination (CSE) algorithm for the realization of FIR filters
based on multiple constant multiplications (MCMs). This
algorithm shares the maximum number of partial terms
amongst the minimum signed digit (MSD)-represented
coefficients. The proposed algorithm modifies the iterated
matching (ITM) algorithm to share more partial terms in
MCMs and apply it to MSD-represented coefficients. These
modifications provide a significant logic and consequently
chip area savings. Employing the proposed algorithm yields
efficient realizations of FIR filters with fewer adders
compared to the conventional CSE algorithms.
Experimental results demonstrate that the proposed
algorithm can contribute up to a 22% reduction in the
complexity of FIR filters over some conventional CSE
algorithms. The proposed algorithm also addresses
challenges encountered in resource-constrained applications
that require banks of high-order filters such as in real-time
distributed optical fiber sensor applications.
Index Terms—Common subexpression elimination
(CSE), finite impulse response (FIR) filter, minimal signed
digit (MSD), multiple constant multiplications (MCMs)
1. INTRODUCTION
An FIR filter is a linear time invariant system governed
by a linear convolution of the input samples with the filter
coefficients, as shown in (1). In this equation, Ck stands for
the filter coefficients, and x[n] and y[n] denote the input and
output signals, respectively.
[ ] ∑ [ ]
The complexity of implementing FIR filters is mainly
dominated by product operations between filter coefficients
and input samples as reflected in the transposed structure of
the FIR filter in Fig. 1.
In recent years, there has been an increasing demand for
efficient implementations of FIR filters driven by high
accuracy and low power consumption requirements as well
as the flexibility of their implementation on hardware
platforms such as field programmable gate arrays (FPGAs)
or application specific integrated circuits (ASICs).
In applications such as distributed optical fiber sensors
[1], the use of higher order filters with long bit-width
coefficients is necessary, as the specification of filters
should be exactly met. An efficient implementation of
higher order filters with long bit-width coefficients is a
major challenge since there are always tradeoffs concerning
accuracy, power consumption, and speed in hardware
implementations. Therefore, the realization of FIR filters
with a reasonable tradeoff is demanding.
As shown in the transposed structure of the FIR filter, the
same input sample is multiplied by a set of coefficients at
each time. This kind of operation is known as multiple
constant multiplications (MCMs) and provides the
opportunity to realize FIR filters with a less amount of
computational resources.
The realization of MCMs is closely related to the
substitution of constant multiplications by shift and addition
operations. The substitution of multipliers with adders and
shift-registers enables significant savings in hardware
platform resources as they are more cost-efficient than
multipliers. It also enables the utilization of algorithms for
the detection of redundancies among constants and sharing
of partial terms.
In general, algorithms used for realizations of MCMs are
categorized into two approaches: graph-dependence (GD)
and common subexpression elimination (CSE).
The GD approach relies on the graph theory to synthesize
the coefficients of a filter with a number of primitive
Mohsen Amiri Farahani, Student Member, IEEE, Eduardo Castillo-Guerra, Bruce G. Colpitts, Senior Members, IEEE
Department of Electrical and Computer engineering, University of New Brunswick, Canada
A New Algorithm for Realization of FIR Filters
Using Multiple Constant Multiplications
Z -1 +
× CN-1 × CN-2
Z -1 +
× CN-3
Z -1 +
× C1 × C0
Z -1
Y[n]
X[n]
+
Fig. 1. Transposed structure of the FIR filter.

arithmetic operations [2]. It models inner products of input
samples by nodes of the graph and the shift operations by
edges of the graph.
Several GD algorithms such as Bull Horrock’s modified
(BHM) [3] and reduced adder graph (RAG) [4] have been
reported in the literature. Recently, significantly more
efficient GD-based algorithms were introduced in [5], [6].
The authors in [5] used a new graph structure to code the set
of coefficients based on their probability and conditional
probability of occurrence. Voronenko and Püschel in [6]
presented an optimal GD-based algorithm, which
extensively explores possible partial products (intermediate
vertices) among constants.
The CSE approach is a subset of the general adder graph
theory. They encounter the MCM problem with respect to
the numerical representation of constants.
Hartley algorithm is one of the first reported CSE
algorithms [7]. It searches through canonical signed digit
(CSD)-represented coefficients to find several common
subexpressions that can be conveniently reduced to a single
instance. The efficient numerical representations such as
CSD or minimal signed digit (MSD) are more demanding as
they represent numbers with fewer nonzero bits than normal
binary representation [8].
The iterative matching (ITM) algorithm in [9] is another
basic algorithm of CSE. It finds the maximum coincidences
between pairs of constants based on the most common
pattern and then eliminates a number of parallel adders
between them. In [10], some modifications were applied to
the ITM algorithm to maximize the sharing of partial terms
amongst constants having binary or CSD representations.
Same as GD-based algorithms, the CSE algorithms have
enabled a reduction in area and power consumption and an
increase in the throughput when they are employed to
implement FIR filters. In [11], the logic depth of filters was
reduced by using each common subexpression only one
time.
To share a maximum number of adders amongst the
constants and to realize MCMs with a shorter logic depth,
we present a new CSE algorithm by modifying the ITM
algorithm presented in [9]. The proposed algorithm searches
inside MSD-represented constants to find the best match,
and then uses the pattern corresponding to the best match to
do further optimization steps.
The remainder of the paper is organized into several
sections. In Section 2, we present the limitations of the ITM
algorithm. Section 3 introduces the proposed algorithm. The
results of comparison between the proposed algorithm and
some conventional algorithms are presented in Section 4.
Finally, the conclusion along with the scope of future work
is presented in the last section.
2. LIMITATIONS OF ITM ALGORITHM
In this section, we analyze the ITM algorithm [9] and
exlpain its main limitation: sharing the maximum number of
partial terms in realization of MCMs. For simplicity and
clarity, a basic example (Example 1) consisting of a set of
three constants, H = {c0, c1, c2}, is used. Table I shows the
set of constants and their CSD representation.
Table I
The set of constants of Example 1.
c0 583 0 1 0 0 1 0 0 1 0 01
c1 143 0 0 0 1 0 0 1 0 0 01
c2 -1145 10 010 0 0 1 0 01
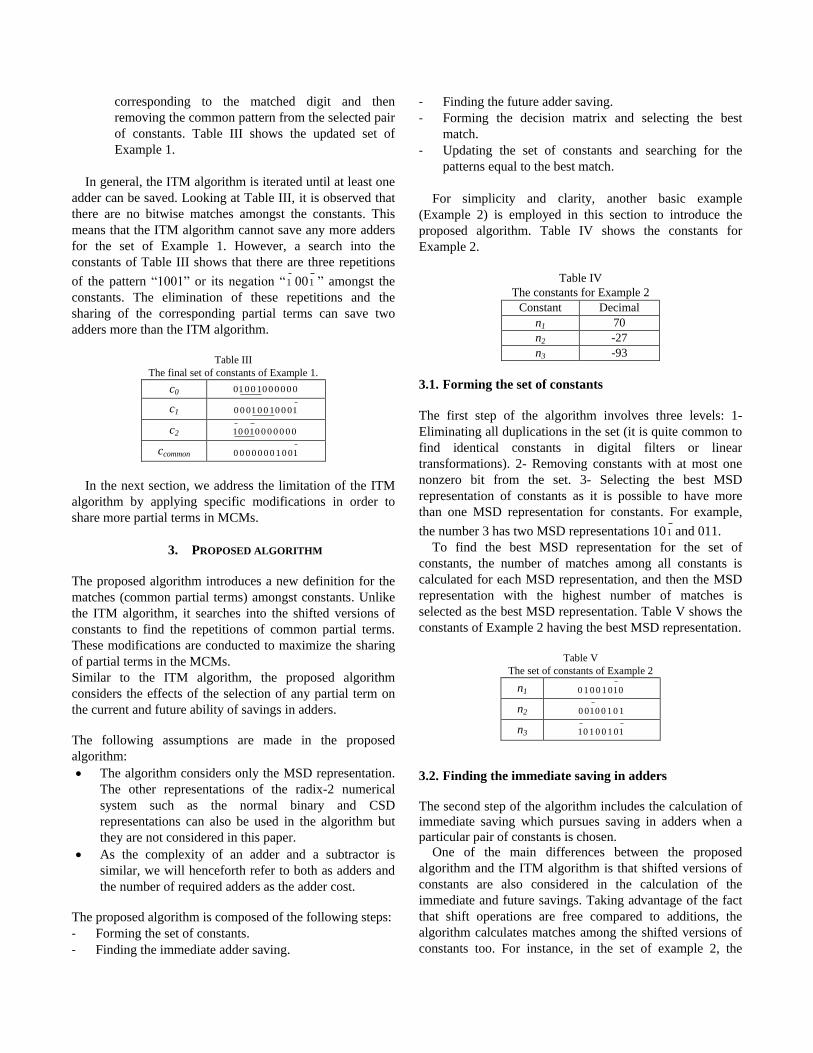
The ITM algorithm selects partial terms based on the
most common patterns amongst the constants. The common
patterns are chosen in advance based on the bitwise matches
amongst constants.
The ITM algorithm presented in [9] can be briefly
analyzed in three steps as follows:
1- The calculation of the current (immediate) saving in
adders. The immediate saving is the number of
adders that can be saved based on the nonzero
bitwise matches amongst pairs of constants. For
example, there are two nonzero bitwise matches
between c0 and c2, that make the immediate saving
of this pair equal to one. Table II shows the
immediate savings for the set of Example 1.
Table II
Immediate savings for the set of Example 1.
c0 c1 c2
c0 - 0 1
c1 0 - 0
c2 1 0 -
2- The calculation of the later (future) saving in adders.
The future saving is the number of adders that can
be saved at the next iteration of the algorithm. For
the set of Example 1, there is no future saving as
there is no match amongst constants in the next
iteration of the algorithm.
3- The selection of the best match using the immediate
and future savings. Based on Table II, the best
match is between c0 and c2 and the pattern
corresponding to the best match (the matched digit)
is “1001 ”.
4- Updating the set of constants. The algorithm
updates the set of constants by adding a constant
corresponding to the matched digit and then
removing the common pattern from the selected pair
of constants. Table III shows the updated set of
Example 1.
In general, the ITM algorithm is iterated until at least one
adder can be saved. Looking at Table III, it is observed that
there are no bitwise matches amongst the constants. This
means that the ITM algorithm cannot save any more adders
for the set of Example 1. However, a search into the
constants of Table III shows that there are three repetitions
of the pattern “1001” or its negation “1 001 ” amongst the
constants. The elimination of these repetitions and the
sharing of the corresponding partial terms can save two
adders more than the ITM algorithm.
Table III
The final set of constants of Example 1.
c0 01001000000
c1 0 0 01 0 0 10 0 01
c2 10 010 0 0 0 0 0 0
ccommon 0 0 0 0 0 0 0 1 0 01
In the next section, we address the limitation of the ITM
algorithm by applying specific modifications in order to
share more partial terms in MCMs.
3. PROPOSED ALGORITHM
The proposed algorithm introduces a new definition for the
matches (common partial terms) amongst constants. Unlike
the ITM algorithm, it searches into the shifted versions of
constants to find the repetitions of common partial terms.
These modifications are conducted to maximize the sharing
of partial terms in the MCMs.
Similar to the ITM algorithm, the proposed algorithm
considers the effects of the selection of any partial term on
the current and future ability of savings in adders.
The following assumptions are made in the proposed
algorithm:
The algorithm considers only the MSD representation.
The other representations of the radix-2 numerical
system such as the normal binary and CSD
representations can also be used in the algorithm but
they are not considered in this paper.
As the complexity of an adder and a subtractor is
similar, we will henceforth refer to both as adders and
the number of required adders as the adder cost.
The proposed algorithm is composed of the following steps:
- Forming the set of constants.
- Finding the immediate adder saving.
- Finding the future adder saving.
- Forming the decision matrix and selecting the best
match.
- Updating the set of constants and searching for the
patterns equal to the best match.
For simplicity and clarity, another basic example
(Example 2) is employed in this section to introduce the
proposed algorithm. Table IV shows the constants for
Example 2.
Table IV
The constants for Example 2
Constant Decimal
n1 70
n2 -27
n3 -93
3.1. Forming the set of constants
The first step of the algorithm involves three levels: 1-
Eliminating all duplications in the set (it is quite common to
find identical constants in digital filters or linear
transformations). 2- Removing constants with at most one
nonzero bit from the set. 3- Selecting the best MSD
representation of constants as it is possible to have more
than one MSD representation for constants. For example,
the number 3 has two MSD representations 101 and 011.
To find the best MSD representation for the set of
constants, the number of matches among all constants is
calculated for each MSD representation, and then the MSD
representation with the highest number of matches is
selected as the best MSD representation. Table V shows the
constants of Example 2 having the best MSD representation.
Table V
The set of constants of Example 2
n1 0 1 0 0 1 010
n2 0 010 0 1 0 1
n3 10 1 0 0 1 01
3.2. Finding the immediate saving in adders
The second step of the algorithm includes the calculation of
immediate saving which pursues saving in adders when a
particular pair of constants is chosen.
One of the main differences between the proposed
algorithm and the ITM algorithm is that shifted versions of
constants are also considered in the calculation of the
immediate and future savings. Taking advantage of the fact
that shift operations are free compared to additions, the
algorithm calculates matches among the shifted versions of
constants too. For instance, in the set of example 2, the

constant n1 can be shifted one digit to the left or right and
then be compared with other constants to find common
patterns between them.
In addition to the consideration of shifted versions of
constants, in this work (unlike the ITM algorithm), the
definition of matches is also extended to: 1- The bitwise
match between two constants (what has been done in the
ITM algorithm) and 2- The bitwise match between one
constant and the negation of the other one (called negated
match). For example, there is a negated match between n1 =
“ 0 1 0 0 1 010 ” and n2 = “ 0 010 0 1 0 1 ” with the common pattern
“100001 ”. This extension in the definition of matches in the
proposed algorithm enables the sharing of more common
partial terms amongst the constants.
The immediate saving for the set of Example 2 is
calculated and shown in Fig. 2. In this figure, matrixes T
and T show the immediate savings based on the bitwise and
negated matches, respectively. The size of both symmetric
matrixes is N by N, where N is the number of constants in
the set.
Every particular element of the matrixes indicates a
number of adders that can be saved by selecting that pair.
For example, the element at row 1, column 3 of the matrix T indicates the number of adders that can be saved by
selecting n1 and n3 as the best match.
The immediate saving gives useful information about the
possible savings in adders, but in order to have maximum
sharing of partial terms, the effects of any selection on the
future saving in adders should be analyzed.
3.3. Finding the future saving in adders
The future saving in adders focuses on the potential to save
adders in the next iteration of the algorithm after affecting
the selection of a particular pair as the best match. For a
particular pair, the future saving is calculated based on the
average of three top best savings in adders after applying the
effects of the selection of that pair as the best match to the
set. It was found in the experiments that the average of three
top best savings is a good estimation of the future saving.
The future saving for the set of Example 2 is calculated
and shown in Fig. 3. Every particular element of matrix P
points to the possible future saving in adders if the
corresponding pair is selected as the best match based on the
bitwise matches. In matrix P , every particular element
points to the possible future saving in adders if the
corresponding pair is selected as the best match based on the
negated matches.
The information behind these two recent matrixes
provides a good feedback about the effects of any selections
on future savings in adders. This information along with the
immediate saving is considered to the selection of the best
match in the next step of the algorithm.
3.4. Forming the decision matrixes and selecting the best
match
In this step of the algorithm, the decision matrixes are made
using the immediate and future savings in adders. These
matrixes allow the selection of the best match while both
current and future savings are considered.
The decision matrixes based on bitwise and negated
matches, D and D are formulated in (2).
Fig. 4 shows the resulting decision matrixes for Example
2. The location of maximums in the decision matrixes points
to the pair of constants that can be selected as the best
match.
There is more than one candidate for the best match in the
set of Example 2. In cases in which there are multiple
candidates for the best match (more than two maximums in
the decision matrixes), the algorithm calculates the
summation of the elements in the row and column of
decision matrixes corresponding to the location of the
candidates. It then selects the candidate with the smallest
summation as the best match. In Example 2, the smallest
summation is for the row 1, column 2 of the decision
matrixes. This means that the best match is between the pair
of n1 and n2.
0 0 1
0 0 1
1 1 0
T
0 1 1
1 0 1
1 1 0
T
Fig. 2. Immediate saving for the set of Example 2.
0 0 0 .6 6
0 0 0
0 .6 6 0 0
P
0 0 .6 6 0 .6 6
0 .6 6 0 0 .6 6
0 .6 6 0 .6 6 0
P
Fig. 3. Future saving in adders for Example 2.
.D T P & .D T P (2)
0 0 0 .6 6
0 0 0 .6 6
0 .6 6 0 .6 6 0
D
0 0 .6 6 0 .6 6
0 .6 6 0 0 .6 6
0 .6 6 0 .6 6 0
D
Fig. 4. Decision matrixes for Example 2.
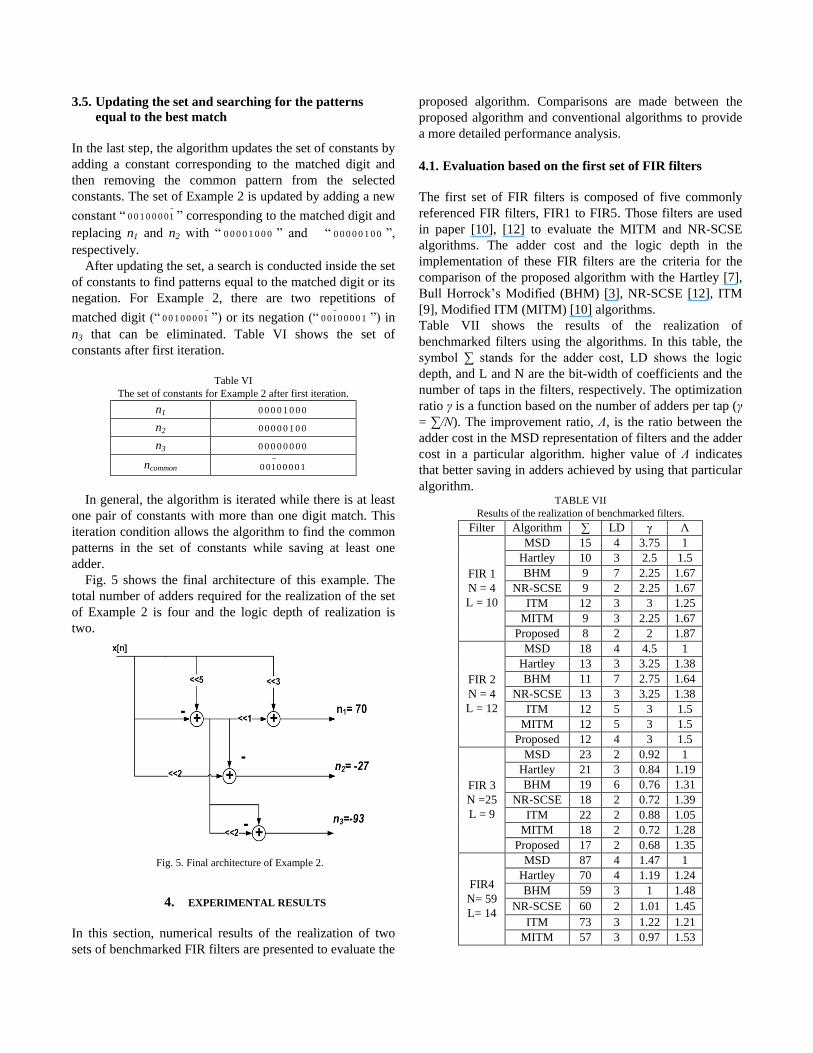
3.5. Updating the set and searching for the patterns
equal to the best match
In the last step, the algorithm updates the set of constants by
adding a constant corresponding to the matched digit and
then removing the common pattern from the selected
constants. The set of Example 2 is updated by adding a new
constant “ 0 0 1 0 0 0 01 ” corresponding to the matched digit and
replacing n1 and n2 with “ 0 0 0 0 1 0 0 0 ” and “ 0 0 0 0 0 1 0 0 ”,
respectively.
After updating the set, a search is conducted inside the set
of constants to find patterns equal to the matched digit or its
negation. For Example 2, there are two repetitions of
matched digit (“ 0 0 1 0 0 0 01 ”) or its negation (“ 0 010 0 0 0 1 ”) in
n3 that can be eliminated. Table VI shows the set of
constants after first iteration.
Table VI
The set of constants for Example 2 after first iteration.
n1 0 0 0 0 1 0 0 0
n2 0 0 0 0 0 1 0 0
n3 0 0 0 0 0 0 0 0
ncommon 0 010 0 0 0 1
In general, the algorithm is iterated while there is at least
one pair of constants with more than one digit match. This
iteration condition allows the algorithm to find the common
patterns in the set of constants while saving at least one
adder.
Fig. 5 shows the final architecture of this example. The
total number of adders required for the realization of the set
of Example 2 is four and the logic depth of realization is
two.
4. EXPERIMENTAL RESULTS
In this section, numerical results of the realization of two
sets of benchmarked FIR filters are presented to evaluate the
proposed algorithm. Comparisons are made between the
proposed algorithm and conventional algorithms to provide
a more detailed performance analysis.
4.1. Evaluation based on the first set of FIR filters
The first set of FIR filters is composed of five commonly
referenced FIR filters, FIR1 to FIR5. Those filters are used
in paper [10], [12] to evaluate the MITM and NR-SCSE
algorithms. The adder cost and the logic depth in the
implementation of these FIR filters are the criteria for the
comparison of the proposed algorithm with the Hartley [7],
Bull Horrock’s Modified (BHM) [3], NR-SCSE [12], ITM
[9], Modified ITM (MITM) [10] algorithms.
Table VII shows the results of the realization of
benchmarked filters using the algorithms. In this table, the
symbol ∑ stands for the adder cost, LD shows the logic
depth, and L and N are the bit-width of coefficients and the
number of taps in the filters, respectively. The optimization
ratio γ is a function based on the number of adders per tap (γ
= ∑/N). The improvement ratio, Λ, is the ratio between the
adder cost in the MSD representation of filters and the adder
cost in a particular algorithm. higher value of Λ indicates
that better saving in adders achieved by using that particular
algorithm. TABLE VII
Results of the realization of benchmarked filters.
Filter Algorithm ∑ LD γ Λ
FIR 1
N = 4
L = 10
MSD 15 4 3.75 1
Hartley 10 3 2.5 1.5
BHM 9 7 2.25 1.67
NR-SCSE 9 2 2.25 1.67
ITM 12 3 3 1.25
MITM 9 3 2.25 1.67
Proposed 8 2 2 1.87
FIR 2
N = 4
L = 12
MSD 18 4 4.5 1
Hartley 13 3 3.25 1.38
BHM 11 7 2.75 1.64
NR-SCSE 13 3 3.25 1.38
ITM 12 5 3 1.5
MITM 12 5 3 1.5
Proposed 12 4 3 1.5
FIR 3
N =25
L = 9
MSD 23 2 0.92 1
Hartley 21 3 0.84 1.19
BHM 19 6 0.76 1.31
NR-SCSE 18 2 0.72 1.39
ITM 22 2 0.88 1.05
MITM 18 2 0.72 1.28
Proposed 17 2 0.68 1.35
FIR4
N= 59
L= 14
MSD 87 4 1.47 1
Hartley 70 4 1.19 1.24
BHM 59 3 1 1.48
NR-SCSE 60 2 1.01 1.45
ITM 73 3 1.22 1.21
MITM 57 3 0.97 1.53
Fig. 5. Final architecture of Example 2.
Proposed 57 3 0.97 1.53
FIR5
N= 60
L= 14
MSD 114 6 1.9 1
Hartley 85 4 1.42 1.35
BHM 61 8 1.02 1.86
NR-SCSE 58 3 0.97 1.96
ITM 66 4 1.10 1.72
MITM 57 3 0.95 2.00
Proposed 56 3 0.93 2.04
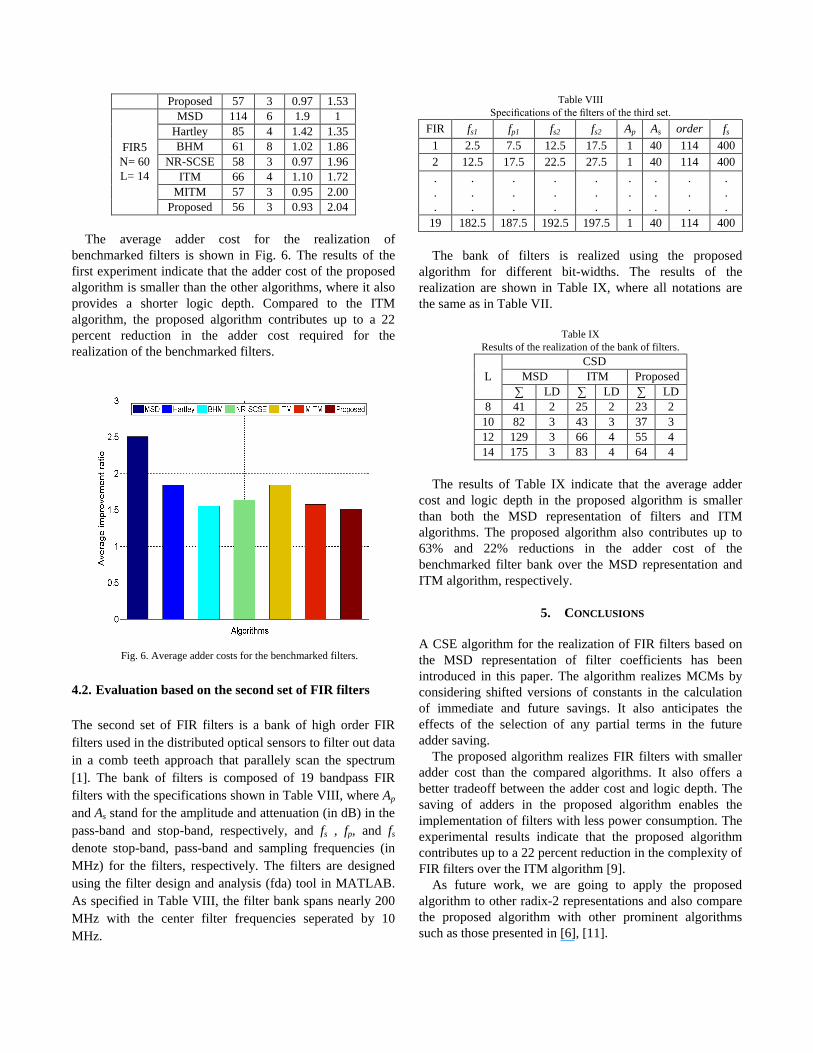
The average adder cost for the realization of
benchmarked filters is shown in Fig. 6. The results of the
first experiment indicate that the adder cost of the proposed
algorithm is smaller than the other algorithms, where it also
provides a shorter logic depth. Compared to the ITM
algorithm, the proposed algorithm contributes up to a 22
percent reduction in the adder cost required for the
realization of the benchmarked filters.
4.2. Evaluation based on the second set of FIR filters
The second set of FIR filters is a bank of high order FIR
filters used in the distributed optical sensors to filter out data
in a comb teeth approach that parallely scan the spectrum
[1]. The bank of filters is composed of 19 bandpass FIR
filters with the specifications shown in Table VIII, where Ap
and As stand for the amplitude and attenuation (in dB) in the
pass-band and stop-band, respectively, and fs , fp, and fs
denote stop-band, pass-band and sampling frequencies (in
MHz) for the filters, respectively. The filters are designed
using the filter design and analysis (fda) tool in MATLAB.
As specified in Table VIII, the filter bank spans nearly 200
MHz with the center filter frequencies seperated by 10
MHz.
Table VIII
Specifications of the filters of the third set.
FIR fs1 fp1 fs2 fs2 Ap As order fs
1 2.5 7.5 12.5 17.5 1 40 114 400
2 12.5 17.5 22.5 27.5 1 40 114 400
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19 182.5 187.5 192.5 197.5 1 40 114 400
The bank of filters is realized using the proposed
algorithm for different bit-widths. The results of the
realization are shown in Table IX, where all notations are
the same as in Table VII.
Table IX
Results of the realization of the bank of filters.
L
CSD
MSD ITM Proposed
∑ LD ∑ LD ∑ LD
8 41 2 25 2 23 2
10 82 3 43 3 37 3
12 129 3 66 4 55 4
14 175 3 83 4 64 4
The results of Table IX indicate that the average adder
cost and logic depth in the proposed algorithm is smaller
than both the MSD representation of filters and ITM
algorithms. The proposed algorithm also contributes up to
63% and 22% reductions in the adder cost of the
benchmarked filter bank over the MSD representation and
ITM algorithm, respectively.
5. CONCLUSIONS
A CSE algorithm for the realization of FIR filters based on
the MSD representation of filter coefficients has been
introduced in this paper. The algorithm realizes MCMs by
considering shifted versions of constants in the calculation
of immediate and future savings. It also anticipates the
effects of the selection of any partial terms in the future
adder saving.
The proposed algorithm realizes FIR filters with smaller
adder cost than the compared algorithms. It also offers a
better tradeoff between the adder cost and logic depth. The
saving of adders in the proposed algorithm enables the
implementation of filters with less power consumption. The
experimental results indicate that the proposed algorithm
contributes up to a 22 percent reduction in the complexity of
FIR filters over the ITM algorithm [9].
As future work, we are going to apply the proposed
algorithm to other radix-2 representations and also compare
the proposed algorithm with other prominent algorithms
such as those presented in [6], [11].
Fig. 6. Average adder costs for the benchmarked filters.

REFERENCES
[1] P. Chaube et all., “Distributed fiber-optic sensor for dynamic
strain measurement,” IEEE Sensors Journal, vol. 8, no. 7,
July 2008.
[2] A. Dempster and M. D. Macleod, “Constant integer
multiplication using minimum adders,” Proc. Inst. Elec. Eng.
Circuits and Systems, vol. 141, no. 5, pp. 407–413, 1994.
[3] D. R. Bull and D. H. Horrocks, “Primitive operator digital
filter,” Proc. Inst. Elec. Eng. Circuits, Devices and Systems,
vol. 138, pt. G, pp. 401–412, 1991.
[4] A. Dempster and M. D. Macleod, “Use of minimum-adder
multiplier blocks in FIR digital filters,” IEEE Trans. Circuits
Syst. II, vol. 42, pp. 569–577, 1995.
[5] C. H. Chang, J. Chen, and A. P. Vinod, “Information theoretic
approach to complexity reduction of FIR filter design,” IEEE
Trans. Circuits Syst. I, Reg. Papers, vol. 55, no. 8, pp. 2310-
2321, Sep. 2008.
[6] Y. Voronenko and M. Puschel, “Multiplierless multiple
constant multiplication,” ACM Trans. Algorithms, vol. 3, no.
2, May 2007.
[7] R. Hartley, “Optimization of canonical signed digit
multipliers for filter design,” IEEE Int. Symp. Circuits Syst.,
Singapore, pp. 1992–1995, 1991.
[8] M. D. Macleod and A. G. Dempster, “Multiplierless FIR filter
design algorithms,” IEEE Signal Process. Lett., vol. 12, no. 3,
pp. 186–189, 2005.
[9] M. Potkonjak et al., “Multiple constant multiplication:
Efficient and versatile framework and algorithms for
exploring common subexpression elimination,” IEEE Trans.
Comput. Aid. Des., vol. 15, no. 2, pp. 151–165, 1996.
[10] M. A. Farahani, E. C. Guerra, and B. G. Colpitts, “Efficient
implementation of FIR filters based on a novel common
subexpression elimination algorithm,” CCECE’10, 2010.
[11] L. Aksoy et al., “Exact and approximate algorithms for the
optimization of area and delay in multiple constant
multiplications,” IEEE Trans. Comput. Aid. Des. Integr.
Circuits Syst., vol. 27, no. 6, pp. 1013-1026, 2008.
[12] M. M. Peiro, E. I. Boemo, and L. Wanhammar, “Design of
high-speed multiplierless filters using a nonrecursive signed
common subexpression algorithm,” IEEE Trans. Circuits
Syst. II, Analog Digit. Signal Process. vol. 49, no. 3, pp. 196–
203, 2002.