A coastal erosion model to predict shoreline changes
7
A coastal erosion model to predict shoreline changes Francesco Adamo b , Claudio De Capua a , Pasquale Filianoti a , Anna Maria Lucia Lanzolla b , Rosario Morello a,⇑ a Department of Information Engineering, Infrastructure and Sustainable Energy, University ‘‘Mediterranea’’ of Reggio Calabria, Reggio Calabria, Italy b Department of Electric and Information Engineering, Politecnico di Bari, Bari, Italy article info Article history: Available online 5 October 2013 Keywords: Coastal erosion Wave propagation direction Measurement uncertainty Shoreline prediction abstract Coastal erosion is a natural phenomenon affecting a growing number of worldwide sites. The impact of the waves on coast is cause of debris removal and soil erosion. The effect depends on wave strength, action time, and wave direction. In literature, several models have been proposed to estimate the mean rate of sediments moved annually alongshore. In the manuscript, the authors propose a prediction model to estimate the evolution of shoreline due to coastal erosion. Three altimeters are used to measure the instantaneous sea surface elevation. Directional wave spectrum is computed in order to estimate the direction of wave propagation and its measurement uncertainty. The shoreline is discre- tised into a finite number of linear segments. Then, according to historical information on the shoreline transformation, the impact of the wave on the coast is evaluated. Subse- quently, the model predicts the changes of each line segment estimating the future shoreline. Ó 2013 Elsevier Ltd. All rights reserved. 1. Introduction Seaquakes, floods and coastal erosion are some effects of water impact on the soil. Such phenomena are due to large amounts of water colliding strikingly with earth. In such cases, water can be even cause of catastrophic events which shape the coast and the environment. The manu- script deals with coastal erosion issue and with prediction of shoreline changes. Such phenomenon is not caused only by sudden and extreme sea storms, but it is the conse- quence of the natural and continuous effect of the wave impacting against the coast. Consequently, attention is mainly turned on monitoring near-shore wave movements in sea and ocean. In literature, probabilistic models based on analyzing historical time series are widely used. Such solutions are cheap, however prediction results are often inaccurate and incomplete. Differently, coast monitoring systems are important tools in order to predict accurately planform and profile evolution of beach. So, real-time data concerning wave elevation and propagation have to be ac- quired. To this aim, near-shore sensor networks are com- monly used to get timely measurements of the sea state [1–8]. Nevertheless such sensor networks suffer of syn- chronization problems [9,10]. In these cases, the wave im- pact on the coast is investigated by analyzing the directional wave [11]. Information on the direction of wave propagation is thus used to estimate the debris removal and the coastal erosion. About this issue, different models and procedures have been proposed in literature. For in- stance, surface buoys with mounted measurement equip- ment such as altimeters [1–4], and wave radar are frequently used for measuring wave elevation in near- shore and off-shore regions [12,13]. Even satellite image processing techniques based on segmentation algorithms have been proposed [14,15]. Nevertheless measurements are often inaccurate entailing false alarms or underestima- tions of hazard events (see Fig. 1). 0263-2241/$ - see front matter Ó 2013 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.measurement.2013.09.048 ⇑ Corresponding author. Fax: +39 0965 875227. E-mail address: [email protected] (R. Morello). Measurement 47 (2014) 734–740 Contents lists available at ScienceDirect Measurement journal homepage: www.elsevier.com/locate/measurement
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of A coastal erosion model to predict shoreline changes

Measurement 47 (2014) 734–740
Contents lists available at ScienceDirect
Measurement
journal homepage: www.elsevier .com/ locate /measurement
A coastal erosion model to predict shoreline changes
0263-2241/$ - see front matter � 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.measurement.2013.09.048
⇑ Corresponding author. Fax: +39 0965 875227.E-mail address: [email protected] (R. Morello).
Francesco Adamo b, Claudio De Capua a, Pasquale Filianoti a, Anna Maria Lucia Lanzolla b,Rosario Morello a,⇑a Department of Information Engineering, Infrastructure and Sustainable Energy, University ‘‘Mediterranea’’ of Reggio Calabria, Reggio Calabria, Italyb Department of Electric and Information Engineering, Politecnico di Bari, Bari, Italy
a r t i c l e i n f o
Article history:Available online 5 October 2013
Keywords:Coastal erosionWave propagation directionMeasurement uncertaintyShoreline prediction
a b s t r a c t
Coastal erosion is a natural phenomenon affecting a growing number of worldwide sites.The impact of the waves on coast is cause of debris removal and soil erosion. The effectdepends on wave strength, action time, and wave direction. In literature, several modelshave been proposed to estimate the mean rate of sediments moved annually alongshore.In the manuscript, the authors propose a prediction model to estimate the evolution ofshoreline due to coastal erosion. Three altimeters are used to measure the instantaneoussea surface elevation. Directional wave spectrum is computed in order to estimate thedirection of wave propagation and its measurement uncertainty. The shoreline is discre-tised into a finite number of linear segments. Then, according to historical informationon the shoreline transformation, the impact of the wave on the coast is evaluated. Subse-quently, the model predicts the changes of each line segment estimating the futureshoreline.
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
Seaquakes, floods and coastal erosion are some effectsof water impact on the soil. Such phenomena are due tolarge amounts of water colliding strikingly with earth. Insuch cases, water can be even cause of catastrophic eventswhich shape the coast and the environment. The manu-script deals with coastal erosion issue and with predictionof shoreline changes. Such phenomenon is not caused onlyby sudden and extreme sea storms, but it is the conse-quence of the natural and continuous effect of the waveimpacting against the coast. Consequently, attention ismainly turned on monitoring near-shore wave movementsin sea and ocean. In literature, probabilistic models basedon analyzing historical time series are widely used. Suchsolutions are cheap, however prediction results are ofteninaccurate and incomplete. Differently, coast monitoring
systems are important tools in order to predict accuratelyplanform and profile evolution of beach. So, real-time dataconcerning wave elevation and propagation have to be ac-quired. To this aim, near-shore sensor networks are com-monly used to get timely measurements of the sea state[1–8]. Nevertheless such sensor networks suffer of syn-chronization problems [9,10]. In these cases, the wave im-pact on the coast is investigated by analyzing thedirectional wave [11]. Information on the direction of wavepropagation is thus used to estimate the debris removaland the coastal erosion. About this issue, different modelsand procedures have been proposed in literature. For in-stance, surface buoys with mounted measurement equip-ment such as altimeters [1–4], and wave radar arefrequently used for measuring wave elevation in near-shore and off-shore regions [12,13]. Even satellite imageprocessing techniques based on segmentation algorithmshave been proposed [14,15]. Nevertheless measurementsare often inaccurate entailing false alarms or underestima-tions of hazard events (see Fig. 1).

Fig. 1. Wave elevation record.
F. Adamo et al. / Measurement 47 (2014) 734–740 735
The authors propose an innovative approach to predictthe coastal erosion evolution. It is based on a modelpreviously developed in [16], which is able to estimatethe direction of wave propagation by means of elevationmeasurements. The direction of wave propagation is animportant parameter to estimate the sediment transport.Measurement systems used in the practice are commonlybased on wave-gauges or altimeters. Sensor networks orarrays are among the most widely proposed solutions forwave direction measurements. Buoy data are processedto get information about spectrum peak direction and inci-dence angle [17–19]. However, measurement uncertaintyis often not considered during data processing. In the mod-el proposed, the authors entail with this issue [16]. Thedirectional wave spectrum is estimated to characterizewave movements and the sea state [20–24].
The impact of wave on the beach and the resultant ero-sion result depend on several factors such as the strength,the action time, the type of soil and mainly on the directionof propagation. Waves are mostly generated by the wind.In the beginning of generation, wave crests are very shortand typically waves move in many directions. With thegrowth stage, waves propagate in the wind direction andthe crests become longer. Wind waves typically leave thegeneration area becoming swells. The last ones cover longdistances and are long-crested waves. In this sight, thedirection of propagation of wind waves is easily estimatedby considering the wind direction. Differently, more atten-tion has to be paid on swells. So their representation interms of directional spectrum is a basic approach to this is-sue. During motion, when wave is approaching to thecoast, its energy disperses due to different factors such assea depth variation or currents. Information on wave prop-agation angle is therefore used to optimize the predictionof the beach planform evolution. An innovative modelstarts from the current shoreline of the monitored coast.It is discretised into a finite number of linear segments.Then, according to historical information on the shorelinetransformation and on the direction of wave propagation,the model predicts the changes of each line segment soto derive the next shoreline. A map of the beach profileevolution is depicted to compare the time trend and the le-vel of coastal erosion risk.
2. Estimation of wave propagation direction
Waves are principally originated by wind. The main fac-tors which have influence on the size of wind waves arethe wind speed and its duration, water depth, and the ex-tent of sea surface affected by wind. The ideal sea state canbe characterized by means of a sequence of wind waves inan undefined time interval with stationary state. Differ-
ently, the real sea state can be characterized by means ofa discrete number of consecutive waves N � 100–300. Suchnumber is optimal to consider the state as stationary andrepresentative of the sea conditions. With this assumption,the real sea state can be considered as a subsequence of theideal one. Assume to consider a specific point of the sea.After a time, waves start to generate. They can be windwaves or swells. In detail, when the waves are directlydue to local winds, we refer to wind waves. If the wavesare not generated by local wind at that time, we refer toswells, so such waves have been generated elsewhere, orsome time ago. Let us consider a buoy network in the seabeing able to perform wave measurements at near-shore[1–4]. Each boy mounts on board an altimeter. So, we haveto consider a record of the wave elevation g in the fixedpoint of the sea.
This parameter changes with the time. So g(t) is the ver-tical displacement of the wave free surface referred to theundisturbed average level. Each wave can be characterizedas the portion of g(t) between two consecutive zero up-crossings with the same slope. The period of the wave isthe time interval between the two consecutive zero up-crossings. The crest and trough are the points on a wavewith the maximum and minimum values respectively.The wave height is the vertical difference between thetrough and the crest. The wavelength is the time intervalfrom crest to crest.
Suppose to consider several records gi(t) of the wavevertical displacement acquired by the buoy in the consid-ered point of sea. Each record represents a real sea statewith N waves. According to the first-order Stokes theory ofsea state, the time series g1(t), g2(t), . . . , gn(t) are eventsof a stochastic stationary Gaussian process. Each eventhas an infinite time interval, so it represents an ideal seastate and can be described by the equation:
gðtÞ ¼XN
i¼1
ai cosðxit þ eiÞ ð1Þ
The ith element of the summation represents the verticaldisplacement of the wave free surface with amplitude ai,angular frequency xi and phase ei. The sea state theory as-sumes that:� N1;� ei values are stochastically independent and distributed
over a round angle;� xi values are unequal each other;� ai values are infinitesimal.
In order to estimate the line spectrum of the wave ele-vation, we have to consider time series g1, g2, . . . , gn with nbeing an odd number, where t1 = 0, t2 = Dtcamp, . . . , andtn = (n � 1)Dtcamp. The Fourier series gF(t) is obtained by
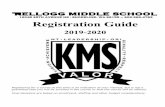
Fig. 2. Direction of wave propagation.
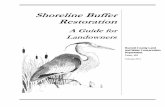
Fig. 3. Measurement uncertainty and direction of wave propagation.
736 F. Adamo et al. / Measurement 47 (2014) 734–740
gFðtÞ ¼XN
i¼1
a0i cosðxitÞ þ a00i sinðxitÞ ð2Þ
with
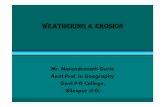
Fig. 4. The applic
gFðt1Þ ¼ g1; . . . ;gFðtnÞ ¼ gn
N ¼ ðn� 1Þ=2
xi ¼2p
Dtcamp
in
a0i ¼2n
Xn
j¼1
gj cosðxitjÞ
a00i ¼2n
Xn
j¼1
gj sinðxitjÞ
and gFðt þ TFÞ ¼ gFðtÞ.The Fourier series gF(t) can be computed by the
equation:
gFðtÞ ¼XN
i¼1
ai cosðxit þ eiÞ ð3Þ
Consequently the line spectrum EF(x) of gF(t) is givenby [25–28]:
EFðxÞ ¼XN
i¼1
12
a2i dðx�xiÞ ð4Þ
In order to analyse the direction of wave propagation,we have to estimate the directional wave spectrum start-ing from the previous equation. To this aim, the authorsstarts from the model in [29]. It was applied successfullyalso in [30] during a small scale field experiment carriedout directly at sea. This model considers three buoys ormeasurements points A, B and C as in Fig. 2. In each point,an altimeter measures the wave elevation. According tothe model in [29,30], the wave elevation in the three pointscan be estimated by the following equations:
gAðtÞ ¼XN
i¼1
ai cosð�xit þ eiÞ ð5Þ
gBðtÞ ¼XN
i¼1
ai cosðkiDx sin hi �xit þ eiÞ ð6Þ
gCðtÞ ¼XN
i¼1
ai cosðkiDy cos hi �xit þ eiÞ ð7Þ
ation case.

Fig. 5. A specific portion of the beach profile.
F. Adamo et al. / Measurement 47 (2014) 734–740 737
where k is the number of waves, and hi is the angle of thedirection of wave propagation.
The previous equations can be rewritten in the follow-ing form:
gAðtÞ ¼XN
i¼1
A0i cos xit þ A00i sinxit ð8Þ
gBðtÞ ¼XN
i¼1
B0i cos xit þ B00i sinxit ð9Þ
gCðtÞ ¼XN
i¼1
C 0i cos xit þ C 00i sinxit ð10Þ
As a consequence, we can obtain the direction angle ofthe wave propagation:
tanðkiDx sin hiÞ ¼A0iB
00i � A00i B0i
A0iB0i þ A00i B00i
ð11Þ
or
tanðkiDy cos hiÞ ¼A0iC
00i � A00i C 0i
A0iC0i þ A00i C00i
ð12Þ
s1
s2
s3
si
sn
Fig. 6. Discretised shoreline.
According to the linear theory of wind-generated wavesin [29,30], the direction angle of the wave propagation hi isgot by estimating the quantities A0i;A
00i ;B
0i;B00i ;C
0i;C
00i . By
resolving Eqs. (11) and (12) respectively, the solution isone if kiDx < p or as an alternative kiDy < p. Two solutionsare possible if p < kiDx < 2p or as an alternative p < ki-
Dy < 2p. We have more of one solution if kiDx > 2p or asan alternative kiDy > 2p.
In brief, the solution for hi is unique if Dx and Dy aresmaller than p/ki, so that
Fig. 7. Coordinates of the pre-erosion ith linear segment.
Fig. 8. Coordinates of the post-erosion ith linear segment.
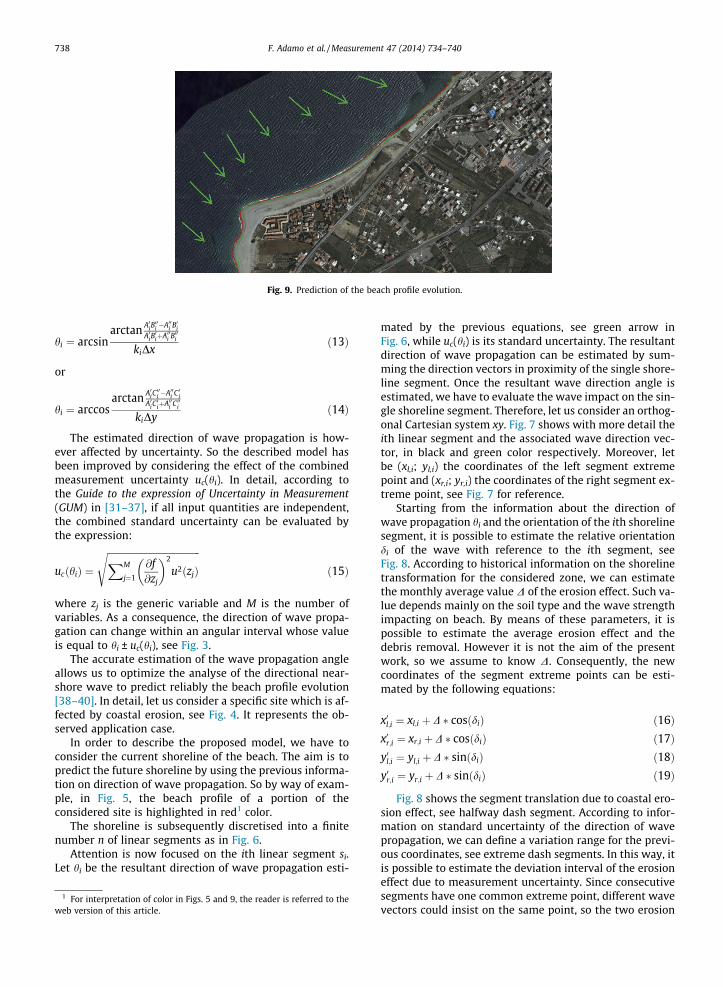
Fig. 9. Prediction of the beach profile evolution.
738 F. Adamo et al. / Measurement 47 (2014) 734–740
hi ¼ arcsinarctan A0iB
00i �A00i B0i
A0iB0iþA00i B00i
kiDxð13Þ
or
hi ¼ arccosarctan A0iC
00i �A00i C0i
A0iC0iþA00i C00i
kiDyð14Þ
The estimated direction of wave propagation is how-ever affected by uncertainty. So the described model hasbeen improved by considering the effect of the combinedmeasurement uncertainty uc(hi). In detail, according tothe Guide to the expression of Uncertainty in Measurement(GUM) in [31–37], if all input quantities are independent,the combined standard uncertainty can be evaluated bythe expression:
ucðhiÞ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiXM
j¼1
@f@zj
� �2
u2ðzjÞ
sð15Þ
where zj is the generic variable and M is the number ofvariables. As a consequence, the direction of wave propa-gation can change within an angular interval whose valueis equal to hi ± uc(hi), see Fig. 3.
The accurate estimation of the wave propagation angleallows us to optimize the analyse of the directional near-shore wave to predict reliably the beach profile evolution[38–40]. In detail, let us consider a specific site which is af-fected by coastal erosion, see Fig. 4. It represents the ob-served application case.
In order to describe the proposed model, we have toconsider the current shoreline of the beach. The aim is topredict the future shoreline by using the previous informa-tion on direction of wave propagation. So by way of exam-ple, in Fig. 5, the beach profile of a portion of theconsidered site is highlighted in red1 color.
The shoreline is subsequently discretised into a finitenumber n of linear segments as in Fig. 6.
Attention is now focused on the ith linear segment si.Let hi be the resultant direction of wave propagation esti-
1 For interpretation of color in Figs. 5 and 9, the reader is referred to theweb version of this article.
mated by the previous equations, see green arrow inFig. 6, while uc(hi) is its standard uncertainty. The resultantdirection of wave propagation can be estimated by sum-ming the direction vectors in proximity of the single shore-line segment. Once the resultant wave direction angle isestimated, we have to evaluate the wave impact on the sin-gle shoreline segment. Therefore, let us consider an orthog-onal Cartesian system xy. Fig. 7 shows with more detail theith linear segment and the associated wave direction vec-tor, in black and green color respectively. Moreover, letbe (xl,i; yl,i) the coordinates of the left segment extremepoint and (xr,i; yr,i) the coordinates of the right segment ex-treme point, see Fig. 7 for reference.
Starting from the information about the direction ofwave propagation hi and the orientation of the ith shorelinesegment, it is possible to estimate the relative orientationdi of the wave with reference to the ith segment, seeFig. 8. According to historical information on the shorelinetransformation for the considered zone, we can estimatethe monthly average value D of the erosion effect. Such va-lue depends mainly on the soil type and the wave strengthimpacting on beach. By means of these parameters, it ispossible to estimate the average erosion effect and thedebris removal. However it is not the aim of the presentwork, so we assume to know D. Consequently, the newcoordinates of the segment extreme points can be esti-mated by the following equations:
x0l;i ¼ xl;i þ D � cosðdiÞ ð16Þx0r;i ¼ xr;i þ D � cosðdiÞ ð17Þy0l;i ¼ yl;i þ D � sinðdiÞ ð18Þy0r;i ¼ yr;i þ D � sinðdiÞ ð19Þ
Fig. 8 shows the segment translation due to coastal ero-sion effect, see halfway dash segment. According to infor-mation on standard uncertainty of the direction of wavepropagation, we can define a variation range for the previ-ous coordinates, see extreme dash segments. In this way, itis possible to estimate the deviation interval of the erosioneffect due to measurement uncertainty. Since consecutivesegments have one common extreme point, different wavevectors could insist on the same point, so the two erosion

F. Adamo et al. / Measurement 47 (2014) 734–740 739
effects have to be added. By applying the model to eachsegment, it is possible to predict the monthly changes ofthe whole shoreline and the consequent evolution of thebeach profile.
Simulations have been performed in order to estimatethe shoreline changes of the considered site shown inFig. 4. The model has been applied and the results areshown in Fig. 9. The current and the predicted shorelineprofiles are shown in red and green color respectively.
The results have shown a good agreement with the ex-pected behavior. At the moment, experimentation is carry-ing out in order to validate the model.
3. Conclusions
In the paper, the authors have proposed a model to pre-dict the shoreline changes due to coastal erosion. The usedprocedure is based on a revised directional wave spectrummodel previously developed by the authors in order to pre-dict accurately the direction of wave propagation. Buoyswith altimeters provide measures of the vertical displace-ment of the wave free surface. Information on wave eleva-tion is then used to estimate the directional wavespectrum. Nevertheless, uncertainty affecting measure-ments can be cause of errors and inaccurate estimationof the wave propagation angle. Therefore, the measure-ment uncertainty is evaluated in order to optimize the esti-mation. The current shoreline of the monitored area issubsequently discretised into a finite number of linear seg-ments, and the wave propagation angle is used to estimatethe debris removal and so the translation of the single seg-ment. A final map showing the evolution of the beach pro-file is depicted.
The aim of the present work is to support the design ofsuitable intervention plans in the areas affected with great-er risk of coastal erosion to reduce the consequent effects.
References
[1] M.L. Heron, W.J. Skirving, K.J. Michael, Short-wave ocean wave slopemodels for use in remote sensing data analysis, IEEE Transactions onGeoscience and Remote Sensing 44 (7) (2006) 1962–1973.
[2] K.E. Steele, Pitch-roll buoy mean wave directions from heaveacceleration, bow magnetism, and starboard magnetism, OceanEngineering Journal 30 (2003) 2179–2199.
[3] S.N. Londhe, Development of wave buoy network using softcomputing techniques, in: Proc. IEEE OCEANS Conference 2008 –MTS/IEEE Kobe Techno-Ocean, 2008, pp. 1–8.
[4] A. Sieber et al., ZigBee based buoy network platform forenvironmental monitoring and preservation: Temperature profilingfor better understanding of Mucilage massive blooming, Proc. 2008International IEEE Workshop on Intelligent Solutions in EmbeddedSystems (2008) 1–14.
[5] L.F. Ferreira, P. Antunesa, F. Dominguesa, P.A. Silvaa, P.S. Andréa,Monitoring of sea bed level changes in nearshore regions using fiberoptic sensors, Measurement 45 (6) (2012) 1527–1533.
[6] k. Jinsoo et al., Accuracy evaluation of a smart phone-basedtechnology for coastal monitoring, Measurement 46 (1) (2013)233–248.
[7] A. D’Orazio, A. Lay Ekuakille, C. Ciminelli, M. De Sario, V. Petruzzelli,F. Prudenzano, Architecture design of an integrated remote sensingcenter for now casting weather prediction inmediterranean area: anoverview, in: Proc. European Geophysical Society Plinius Conferenceon Mediterranean Storms, 1999.
[8] A. D’Orazio, C. Ciminelli, M. De Sario, A. Lay Ekuakille, V. Petruzzelli,F. Prudenzano, Genetic algorithm application for rass-wind profilerdata processing in remote sensing, in: Proc. 2013 IEEE International
Instrumentation and Measurement Technology Conference (IMTC2000), 2000, pp. 386–391.
[9] R. Almeida, N. Cruz, A. Matos, Synchronized intelligent buoy networkfor underwater positioning, in: Proc. IEEE OCEANS Conference 2010,2010, pp. 1–6.
[10] F. Lamonaca, D. Grimaldi, R. Morello, Sub-ls Synchronizationaccuracy in distributed measurement system by PDAs and PCs’triggers reallignement, in: Proc. 2013 IEEE InternationalInstrumentation and Measurement Technology Conference (I2MTC2013), 2013, pp. 801–806.
[11] Marshall D. Earle, Kenneth E. Steele, David W.C. Wang, Commentsand discussion on wave direction analysis from data buoys by Min-Chih Huang and Jia-Yuan Chen, Ocean Engineering Journal 27 (2000)1265–1272.
[12] D.B. Trizna, Coherent marine radar measurements of directionalwave spectra using vertically polarized antennas, in: Proc. IEEEOceans Conference, 2012, pp. 1–5.
[13] D.B. Trizna, Coherent marine radar measurements of ocean surfacecurrents and directional wave spectra, in: Proc. IEEE OCEANSConference, 2011, pp. 1–5.
[14] N.S. Pearre, J.A. Puleo, Quantifying seasonal shoreline variability atRehoboth beach, Delaware, using automated imaging techniques,Journal of Coastal Research 25 (2009) 900–914.
[15] G. Andria, A. D’Orazio, A. Lay Ekuakille, M. Moretti, P. Pieri, F. Tralli,M. Tropeano, Accuracy assessment in photo interpretation of remotesensing ERS-2/SAR images, in: Proc. 2013 IEEE InternationalInstrumentation and Measurement Technology Conference (IMTC2000), 2000, pp. 392–394.
[16] R. Morello, C. De Capua, F. Filianoti, A near-shore wave monitoringmodel for beach planform evolution prediction, in: Proc. 4th ImekoTC19 Symposium on Environmental Instrumentation andMeasurements Protecting Environment, Climate Changes andPollution Control, 2013, pp. 114–118.
[17] A.A. Fernandes, Y.V.B. Sarma, H.B. Menon, Directional spectrum ofocean waves from array measurements using phase/time/pathdifference methods, Ocean Engineering Journal 27 (2000) 345–363.
[18] R. Pascal, I. Bryden, Directional spectrum methods for deterministicwaves, Ocean Engineering Journal 38 (2011) 1382–1396.
[19] V. Sanil Kumar, N.M. Anand, Variations in wave direction estimatedusing first and second order Fourier coefficients, Ocean EngineeringJournal 31 (2004) 2105–2119.
[20] Z. Jianjun, E.W. Gill, Extraction of ocean wave spectra from simulatednoisy bistatic high-frequency radar data, IEEE Journal of OceanicEngineering 31 (4) (2006) 779–796.
[21] H.E. Yijun, W. Perrie, X. Tao, Z. Qingping, Ocean wave spectra from alinear polarimetric SAR, IEEE Transactions on Geoscience andRemote Sensing 42 (11) (2004) 2623–2631.
[22] L.R. Wyatt, High-frequency radar measurements of the ocean wave-directional spectrum, IEEE Journal of Oceanic Engineering 16 (1)(1991) 163–169.
[23] S. Zhanfeng et al., Performance of ocean wave spectrometer indetecting ocean wave spectra, in: Proc. 2012 2nd InternationalConference on Remote Sensing, Environment and Transportation,Engineering (RSETE), 2012, pp. 1–4.
[24] B. Lipa, B. Nyden, Directional wave information from the SeaSonde,IEEE Journal of Oceanic Engineering 30 (1) (2005) 221–231.
[25] Chang-Kyu Rheem, Measurement of directional spectrum of seasurface waves by using a microwave pulse Doppler radar with twofixed antennas, in: Proc. IEEE OCEANS 2011 Conference, 2011, pp. 1–6.
[26] Zheng Wei, Zhang Dianlun, Sun Dajun, Hybrid genetic algorithmapplied to wave directional spectrum estimation by array, in: Proc.IEEE Intelligent Computation Technology and AutomationConference, vol. 1, 2009, pp. 334–338.
[27] P. Vergallo, A. Lay-Ekuakille, Spectral analysis of wind profilersignalfor environment monitoring, in: Proc. 2013 IEEE InternationalInstrumentation and Measurement Technology Conference (I2MTC2012), 2012.
[28] A. Lay Ekuakille, M. Moretti, P. Pieri, F. Tralli, M. Tropeano, Spectralcharacterization of soil by using Ers-2/Sar satellite images, in: Proc.EGS European Geophysicist Society Congress, 1999.
[29] P. Boccotti, A method to obtain the directional wave spectrum,Ocean Engineering Journal 31 (2004) 539–545.
[30] S.M. Camporeale, P. Filianoti, Energy conversion of OWC deviceswith additional vertical ducts, in: Proceedings of the 27thInternational Conference on Offshore Mechanics and, ArcticEngineering, vol. 6, 2008, pp. 101–106.
[31] R. Morello, C. De Capua, M.G. Belvedere, Uncertainty analysis inhemodynamic variables measurement for reliable diagnosis of

740 F. Adamo et al. / Measurement 47 (2014) 734–740
pulmonary hypertension with non-invasive techniques, in: Proc.IEEE 6th International Workshop on Medical Measurement andApplications, 2011, pp. 261–266.
[32] V. Giniotis, K.T.V. Grattan, M. Rybokas, R. Kulvietiene, Uncertaintyand indeterminacy of measurement data, Measurement 36 (2)(2004) 195–202.
[33] F. Attivissimo, A. Cataldo, L. Fabbiano, N. Giaquinto, Systematicerrors and measurement uncertainty: an experimental approach,Measurement 44 (9) (2011) 1781–1789.
[34] Hung-Chia Chen, Pei-Chen Wu, Huang Jing-Ye, Chen Lin-An,Uncertainty analysis for measurement of measurand,Measurement 43 (9) (2010) 1250–1254.
[35] Wladyslaw Jakubiec, Wojciech Płowucha, Marcin Starczak,Analytical estimation of coordinate measurement uncertainty,Measurement 45 (10) (2012) 2299–2308.
[36] JCGM 100, Evaluation of Measurement Data – Guide to theexpression of Uncertainty in Measurement (GUM), BIPM, 2008.
[37] C. De Capua, R. Morello, N. Pasquino, A fuzzy approach to decisionmaking about compliance of environmental electromagnetic fieldwith exposure limits, IEEE Transaction on Instrumentation andMeasurement 58 (3) (2009) 612–617.
[38] S. Corbella, D.D. Stretch, Predicting coastal erosion trends using non-stationary statistics and process-based models, Coastal EngineeringJournal 70 (2012) 40–49.
[39] C. Hapke, N. Plant, Predicting coastal cliff erosion using a Bayesianprobabilistic model, Marine Geology Journal 278 (2010) 140–149.
[40] P. Ekphisutsuntorn, P. Wongwises, C. Chinnarasri, Numericalmodeling of erosion for muddy coast at bangkhuntien shoreline,Thailand, International Journal of Civil and EnvironmentalEngineering 2 (2010) 230–240.