A bi-modal ad-hoc Localization Scheme for Wireless Networks based on RSS and ToF Fusion
6
A bi-modal ad-hoc Localization Scheme for Wireless Networks based on RSS and ToF Fusion Tobias G¨ adeke, Johannes Schmid, Marcel Kr¨ uger, Josefin Jany, Wilhelm Stork, Klaus D. M¨ uller-Glaser Karlsruhe Institute of Technology (KIT) Institute for Information Processing Technologies (ITIV) Karlsruhe, Germany Email: {firstname.lastname}@kit.edu Abstract—Localization of persons or equipment in ad-hoc sce- narios, e.g., after an earthquake still poses many challenges. The popular received signal strength (RSS) based localization methods usually cannot provide the needed accuracy especially if sensor equipment or tools are to be localized in a static environment with non line of sight conditions. On the other hand, time-of- flight (ToF) measurements have shown more accurate results but have difficulties especially if low power hardware or narrow- band wireless systems are used. Inadequate timing capabilities of common low power clocks make synchronization between different nodes in a network difficult. To solve this problem, usual ToF methods use bilateral round trip measurements and high numbers of packets. Compared to one-way RSS measurements, this approach results in a much higher channel load and thus poorer scalability if a large network is assumed. In this paper we present a bi-modal scheme for hybrid RSS/ToF localization in order to tackle this problem. The main idea of the developed approach is to find an equilibrium between inaccurate but efficient RSS measurements on the one hand and precise but more resource-consuming ToF measurements on the other. The goal is to achieve superior localization accuracy in comparison to the use of one method alone. The proposed concept is outlined and achievable results are shown based on experimental data and simulative evaluation. We conclude that the proposed scheme offers good possibilities for improved localization accuracy by keeping the channel usage low. I. I NTRODUCTION Due to the necessity of correlating captured data with the lo- cation of the measurement in almost all scenarios, localization in wireless sensor networks (WSN) is a widely discussed topic. With the growing number of WSN applications more and more customized solutions for specific scenarios are developed. Various principles have been investigated. Among the most common is the evaluation of the received signal strength (RSS) of radio packets although the obtained localization accuracy is usually comparably low. Often, inertial sensors are used additionally to improve the accuracy. Measurements of the time of flight of radio signals are known to be generally more accurate. However the very hard timing requirements on the order of a few nanoseconds make the implementation on typical WSN low power hardware difficult. Determining the location of persons and equipment is relevant in a number of applications such as warehouse management, optimization of hospital processes, or enhanced visitor experience in museums. However, most environments considered in the literature allow the installation of a system infrastructure beforehand. In this paper we consider ad-hoc scenarios where calibration or time-consuming infrastructure installation is not possible. Localization of persons and equipment (assets) is performed by means of an ad-hoc WSN. One such application is found in disaster scenarios like earthquakes, floods, fires or others where buildings are (partly) destroyed and trapped victims need to be rescued from under the debris. We assume that rescue team members are equipped with a pedestrian dead reckoning (PDR) unit to deploy and initialize the anchor node positions of an ad-hoc WSN [1], [2]. Some nodes are placed outside to obtain a reference position from GPS. Others are mainly used for sensing (e.g. acceleration sensor for vibration monitoring) but also serve as anchors for localization. When considering measurement equipment like laser scanners, a quite precise position estimate is needed, e.g., to merge data from multiple scanners into a 3D model of the site. To improve localization accuracy compared to standard RSS localization we propose a bi-modal localization scheme based on RSS measurements and ToF ranging. A Two-Way ToF (TW-ToF) principle is used which can be implemented on low power WSN hardware. Using TW-ToF alone would result in blocking a large amount of channel capacity strongly limiting data transmissions or the number of mobile localizable nodes. The basic principle relies on RSS for rough positioning and then using this estimate to select the most important links on which to perform ToF ranging (figure 1). The presented bi-modal RSS-ToF concept is generally applicable to vari- ous wireless ranging technologies (i.e., WSN, WiFi, Ultra- wideband, etc.). RSS TW-ToF Figure 1. Position estimation from RSS measurements in combination with refinement from TW-ToF range estimates on selected links.
Transcript of A bi-modal ad-hoc Localization Scheme for Wireless Networks based on RSS and ToF Fusion
A bi-modal ad-hoc Localization Scheme forWireless Networks based on RSS and ToF Fusion
Tobias Gadeke, Johannes Schmid, Marcel Kruger, Josefin Jany, Wilhelm Stork, Klaus D. Muller-GlaserKarlsruhe Institute of Technology (KIT)
Institute for Information Processing Technologies (ITIV)Karlsruhe, Germany
Email: {firstname.lastname}@kit.edu
Abstract—Localization of persons or equipment in ad-hoc sce-narios, e.g., after an earthquake still poses many challenges. Thepopular received signal strength (RSS) based localization methodsusually cannot provide the needed accuracy especially if sensorequipment or tools are to be localized in a static environmentwith non line of sight conditions. On the other hand, time-of-flight (ToF) measurements have shown more accurate results buthave difficulties especially if low power hardware or narrow-band wireless systems are used. Inadequate timing capabilitiesof common low power clocks make synchronization betweendifferent nodes in a network difficult. To solve this problem, usualToF methods use bilateral round trip measurements and highnumbers of packets. Compared to one-way RSS measurements,this approach results in a much higher channel load and thuspoorer scalability if a large network is assumed.
In this paper we present a bi-modal scheme for hybridRSS/ToF localization in order to tackle this problem. The mainidea of the developed approach is to find an equilibrium betweeninaccurate but efficient RSS measurements on the one handand precise but more resource-consuming ToF measurements onthe other. The goal is to achieve superior localization accuracyin comparison to the use of one method alone. The proposedconcept is outlined and achievable results are shown basedon experimental data and simulative evaluation. We concludethat the proposed scheme offers good possibilities for improvedlocalization accuracy by keeping the channel usage low.
I. INTRODUCTION
Due to the necessity of correlating captured data with the lo-cation of the measurement in almost all scenarios, localizationin wireless sensor networks (WSN) is a widely discussed topic.With the growing number of WSN applications more and morecustomized solutions for specific scenarios are developed.Various principles have been investigated. Among the mostcommon is the evaluation of the received signal strength (RSS)of radio packets although the obtained localization accuracyis usually comparably low. Often, inertial sensors are usedadditionally to improve the accuracy. Measurements of thetime of flight of radio signals are known to be generallymore accurate. However the very hard timing requirementson the order of a few nanoseconds make the implementationon typical WSN low power hardware difficult.
Determining the location of persons and equipment isrelevant in a number of applications such as warehousemanagement, optimization of hospital processes, or enhancedvisitor experience in museums. However, most environments
considered in the literature allow the installation of a systeminfrastructure beforehand.
In this paper we consider ad-hoc scenarios where calibrationor time-consuming infrastructure installation is not possible.Localization of persons and equipment (assets) is performedby means of an ad-hoc WSN. One such application is foundin disaster scenarios like earthquakes, floods, fires or otherswhere buildings are (partly) destroyed and trapped victimsneed to be rescued from under the debris. We assume thatrescue team members are equipped with a pedestrian deadreckoning (PDR) unit to deploy and initialize the anchor nodepositions of an ad-hoc WSN [1], [2]. Some nodes are placedoutside to obtain a reference position from GPS. Others aremainly used for sensing (e.g. acceleration sensor for vibrationmonitoring) but also serve as anchors for localization. Whenconsidering measurement equipment like laser scanners, aquite precise position estimate is needed, e.g., to merge datafrom multiple scanners into a 3D model of the site.
To improve localization accuracy compared to standard RSSlocalization we propose a bi-modal localization scheme basedon RSS measurements and ToF ranging. A Two-Way ToF(TW-ToF) principle is used which can be implemented on lowpower WSN hardware. Using TW-ToF alone would result inblocking a large amount of channel capacity strongly limitingdata transmissions or the number of mobile localizable nodes.The basic principle relies on RSS for rough positioning andthen using this estimate to select the most important linkson which to perform ToF ranging (figure 1). The presentedbi-modal RSS-ToF concept is generally applicable to vari-ous wireless ranging technologies (i.e., WSN, WiFi, Ultra-wideband, etc.).
RSS
TW-ToF
Figure 1. Position estimation from RSS measurements in combination withrefinement from TW-ToF range estimates on selected links.

II. STATE OF THE ART
A. RSS Ranging
One of the most common methods to determine the dis-tance between two nodes in a WSN is to measure the RSSvalue from a radio packet and determining the correspondingdistance from a path-loss model [1], [3]. The advantage is thatRSS measurements are supported by most hardware platformsand can be obtained easily. The drawback is, however, thatRSS values are strongly affected by environmental conditions.This leads to very noisy measurements, especially for largedistances when more obstacles are present. One way to copewith these fluctuations is to use fingerprinting methods. Here,a database of RSS readings is set up beforehand and measuredRSS values are matched with database entries for specific loca-tions [4]. The major issue with this approach is to establish andmaintain the database. However, for ad-hoc scenarios the timeconsuming process to establish a fingerprint database is usuallynot an option. The other commonly used method to processnoisy measurements is to apply a stochastic filter [5]. Positionestimates are obtained by trilateration from the range measure-ments [6]. To map RSS values to corresponding distances, avariant of the log-distance path loss model is used usually [7].Recently, with the wide availability of inertial sensors, theycan be used to smooth RSS based localization [8]. Achievablelocalization accuracies with RSS measurements are typicallyon the order of a few meters depending mainly on the scenarioand anchor node density.
B. ToF Ranging
Another common way to estimate the distance betweennodes is to measure the time of flight (ToF) of a signal.Because of the low propagation speed of acoustic waves, soundor ultra-sound is very attractive [9], [10]. It is often used forthe localization of robots, with accuracies in the centimetersrange. One major drawback is the range, typically limited to asingle room due to extremely poor non-line of sight (NLOS)performance. Also, environmental noises can easily degradethe accuracy.
A promising technology for robust distance estimation cameup during the last years. Ultrawideband (UWB) signals havethe advantage that multipath components can be resolved,leading to a robust time resolution [11]. The good propagationproperties of UWB signals through walls and obstacles allowfor a much higher accuracy under NLOS conditions comparedto acoustic or narrow-band systems. Accuracies of UWBsystems are also in the centimeter range. A general challengewithin UWB systems is to deal with the complexity of largebandwidth signals, i.e., antenna design or analog and digitalsignal processing [11].
In WSN narrow band radio signal ToF has been used onspecialized hardware and has shown promising results [12].ToF ranging on a software defined radio (SDR) similar to the802.15.4 standard has shown much smaller errors comparedto RSS ranging, especially for long distances [13]. Whenusing ToF with off-the-shelf transceivers achievable results are
typically lower but still show advantages at longer distances[14]–[16]. The main problem is that most ToF approachesrequire bilateral communication between each two nodes forsynchronization (TW-ToF) and thus make it difficult to designa scalable system.
C. Hybrid RSS/ToF Localization
Although there have been many discussions about differentranging methods for a long time, the combination or fusion ofRSS and ToF measurements is a rather new topic. It has beenshown theoretically based on the Cramer-Rao lower bound(CRLB) that RSS ranging might outperform ToF ranging forshort distances while ToF attains high accuracy also for longerdistances [17]. In this work, it is thus suggested to switchbetween the two modes depending on the distance.
A fusion of ToF and RSS for WiFi localization has beenpresented in [18]. The ToF measurements are used to estimatethe path loss model parameters. Timing measurements areacquired with an additional circuit board. For the 802.15.4standard a fusion method is described in [19] and uses a hard-ware time to digital converter for precise time measurements.
However, scalability of the network and data throughput hasnot yet been considered. Especially in ad-hoc scenarios withlarger networks such considerations are of high importance.
III. SYSTEM CONCEPT
When looking at the theoretical aspects of time-basedand RSS ranging techniques we find the Cramer-Rao-Lower-Bound (CRB) by (1) and (2) [17].
V {d}ToF =c2
8π2β2SNR(1)
V {d}RSS =
(ln(10)
10
σSγ
)2
· d2 (2)
The CRB for RSS measurements is directly dependent onthe distance d. Also, it is proportional to the environmentalproperties described by σS and γ. For time-based rangingthe CRB is strongly affected by the used bandwidth β ofthe ranging signals which is the reason for the superiorranging capabilities of UWB systems. The speed of light cis considered constant, such that the SNRs influence has tobe analyzed. As the power received by a transceiver decreaseswith the distance, also the SNR is distance depended whenassuming a constant noise level.
Although the CRB for both methods depend on the distancethe factor of environmental influences in case of RSS is muchlarger compared to ToF-based methods.
A. RSS Ranging
For the localization of nodes by means of RSS valueswe consider a wireless network comprising a set of anchornodes with known positions. As shown in figure 2 on theleft the anchor nodes broadcast their own position in regularintervals. Then, mobile nodes with unknown positions receivethe broadcast messages from the anchor nodes and obtain

Figure 2. RSS broadcast based ranging (left) vs. TW-ToF RTT ranging onsingle link (right).
a distance measurement from the RSS value of the packet.Upon this distance measurement they calculate their positiondecentralized. This position estimate is further refined with astochastic filter [1].
In a more general setup an anchor node might also have anunknown or only roughly known position and also estimatesits position. The difference to a general mobile node would be,that it is not moving at all or only rarely moving. However,in this paper we assume that the anchor nodes have knownpositions and mobile nodes estimate their position upon datafrom these anchor nodes.
B. ToF Ranging
For ToF ranging, the method described in [14] is adoptedfor this paper. A TW-ToF method is used which can beimplemented on low power WSN hardware. A large number ofpackets (range measurements) is used and a mean timer valuefor the round trip time (RTT) is recorded. A measurement isperformed by two nodes A and B as shown in figure 2 onthe right. One of the nodes (A) is considered the Initiatorof the range measurement sending a request-to-range (RTR)packet to the Responder (B). Node B agrees on the rangingby sending an acceptance to range (ATR) back to A. TheInitiator starts a timer upon sending the first ranging packet(RNG). During the ranging period, B does nothing else thanresponding to the RNG packets immediately with constantprocessing delays. Node A reads out the timer after eachreply from the Responder. This procedure is performed fora large number of packets (100..5000) and the mean RTT iscalculated. From this value a calibration timer value at distanced = 0 is subtracted to remove the constant processing delaysoccurring in node B.
The accuracy of the range measurement can be controlledby the number of ranging packets with the trade-off againstlonger measurement times, thus blocking the channel for othercommunication. The chosen ToF method allows measuring theToF with a comparably low timer frequency (i.e., 32 MHz)with higher precision than the frequency would originallyallow. However, the accuracies are still limited by the smallbandwidth of the 802.15.4 PHY layer and can thus notcompete with other ToF systems like UWB.
C. Fusion Concept
The basic differences between RSS and ToF measurementsmay be summarized as follows: RSS ranging scales very
well for large networks by packet broadcasting. Thus, froma single packet sent from one node, all neighboring nodes canobtain the distance to that active node. However, especiallywith growing distance, the obtained distance estimates have ahigh variance. ToF on the other hand can measure distancesmore precisely. The disadvantage is that each single link in anetwork needs to be measured separately leading to a complexranging procedure in large networks.
Thus, the underlying fusion concept has to take these aspectsinto account by minimizing the used network bandwidth andmaximizing the localization accuracy. This is achieved byusing the properties of the network structure, i.e., differentlinks between nodes carry different amounts of information.In a first attempt, the unknown nodes estimate their positionroughly by means of RSS broadcast messages. Upon thisfirst estimate, the most relevant links are selected basedon the estimated position. The position estimation is theniteratively improved by fusing RSS and ToF measurementsin an extended Kalman filter (EKF).
The selection of relevant links is based upon the geometricdilution of precision (GDOP), which is widely used in satelliteconstellations of global navigation satellite systems (GNSS)systems [20]. Depending on the geometric relation of anchorand mobile node, the position error is more or less affected.
IV. EXPERIMENTAL DATA COLLECTION
A. Hard- and Software for ToF Measurements
The ToF ranging hardware implementation is based on theCC2430 System-on-Chip (SoC) from Texas Instruments com-prising an 8051 microcontroller (MCU) and an IEEE802.15.4compliant radio transceiver. The MCUs fastest clock source isa 32 MHz clock which was used in all implementations. TheSoC also offers a 16 bit MAC timer which can be capturedat various RF interrupts, e.g., upon detection of the start offrame delimiter (SFD) sequence when receiving a packet.
For the software routines on the MCU four different imple-mentation variants were analyzed. The methods mainly differin the timing behavior of the firmware and use different eventsto generate the packets to be sent. The following combinationof methods will be described in the following:
• Interrupt service routine (ISR)• Hardware acknowledge packet (ACK)• Timer send & ISR response• Timer send & ACK responseIn the first and straightforward implementation the RNG
packet on the Initiator is generated upon an external command,i.e., for our measurements from an external trigger. TheResponder directly answers to that packet within an ISR whenthe SFD has been detected. We expect that the initiationof the ISR has a delay which depends on the pipeline andarchitecture of the MCU but that it is almost constant. Thesecond variant uses the same initiator routine but makes use ofthe acknowledge packet (ACK) defined by the IEEE 802.15.4standard. This packet is automatically generated in hardware,thus freeing the MCU from generating the ACK packet. The
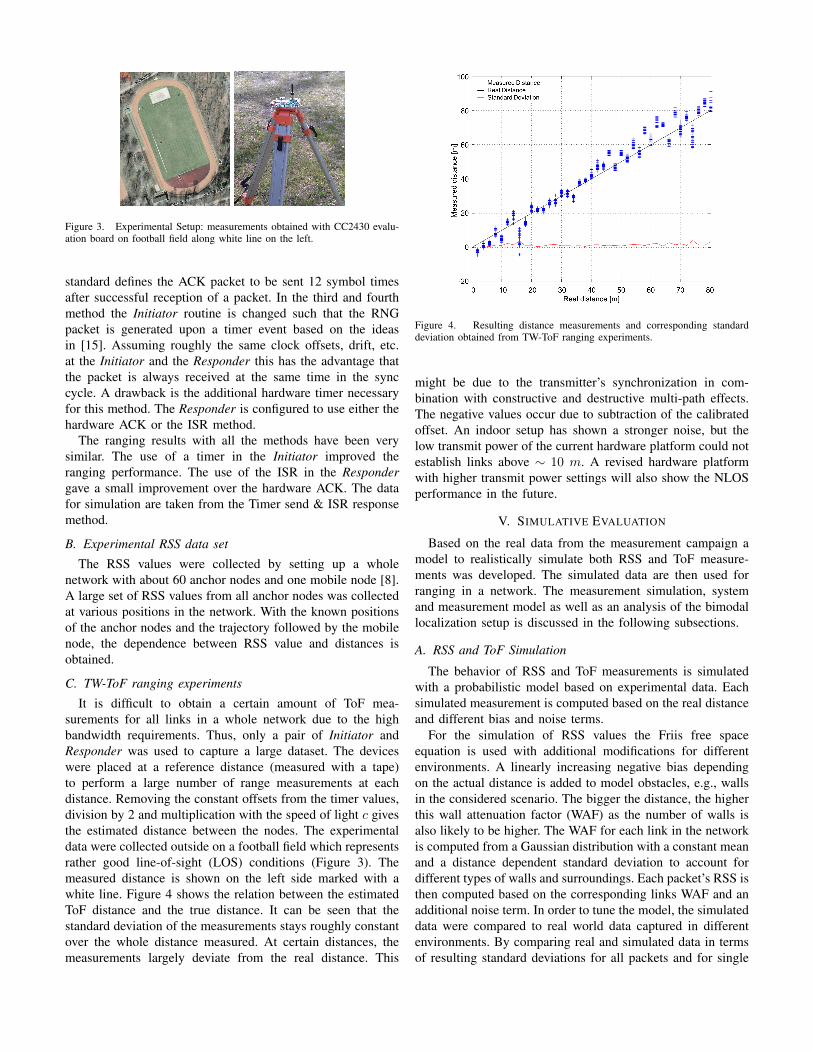
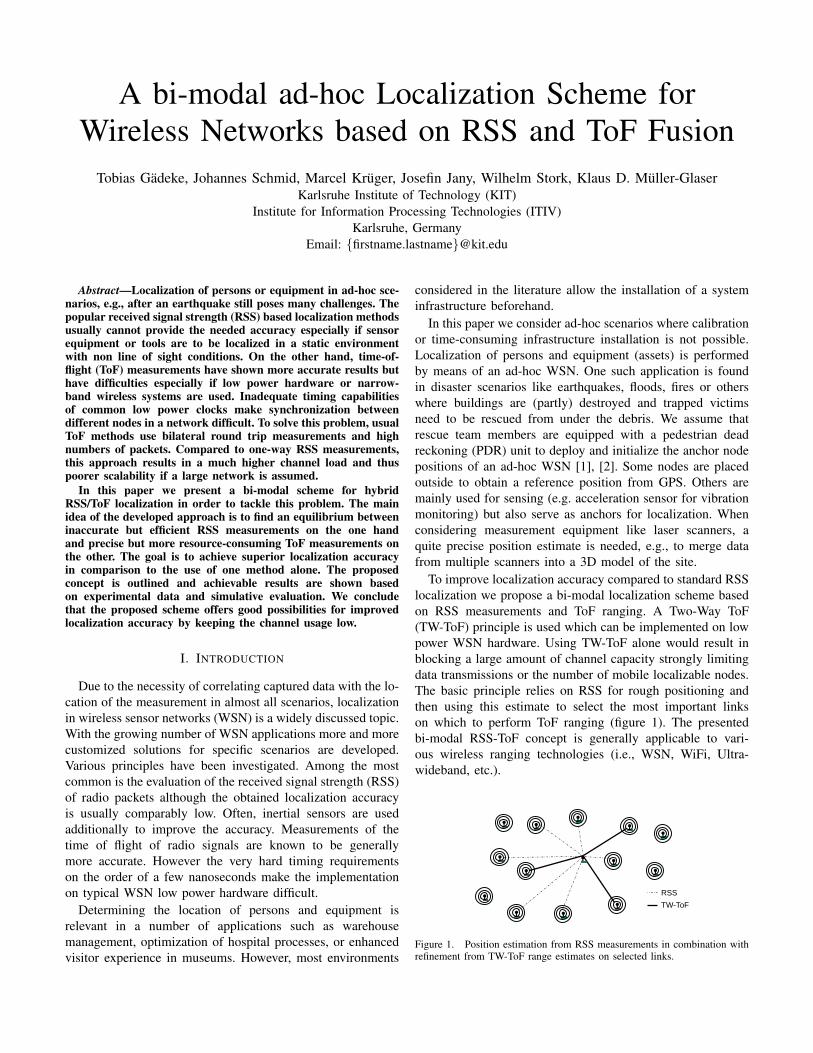
Figure 3. Experimental Setup: measurements obtained with CC2430 evalu-ation board on football field along white line on the left.
standard defines the ACK packet to be sent 12 symbol timesafter successful reception of a packet. In the third and fourthmethod the Initiator routine is changed such that the RNGpacket is generated upon a timer event based on the ideasin [15]. Assuming roughly the same clock offsets, drift, etc.at the Initiator and the Responder this has the advantage thatthe packet is always received at the same time in the synccycle. A drawback is the additional hardware timer necessaryfor this method. The Responder is configured to use either thehardware ACK or the ISR method.
The ranging results with all the methods have been verysimilar. The use of a timer in the Initiator improved theranging performance. The use of the ISR in the Respondergave a small improvement over the hardware ACK. The datafor simulation are taken from the Timer send & ISR responsemethod.
B. Experimental RSS data set
The RSS values were collected by setting up a wholenetwork with about 60 anchor nodes and one mobile node [8].A large set of RSS values from all anchor nodes was collectedat various positions in the network. With the known positionsof the anchor nodes and the trajectory followed by the mobilenode, the dependence between RSS value and distances isobtained.
C. TW-ToF ranging experiments
It is difficult to obtain a certain amount of ToF mea-surements for all links in a whole network due to the highbandwidth requirements. Thus, only a pair of Initiator andResponder was used to capture a large dataset. The deviceswere placed at a reference distance (measured with a tape)to perform a large number of range measurements at eachdistance. Removing the constant offsets from the timer values,division by 2 and multiplication with the speed of light c givesthe estimated distance between the nodes. The experimentaldata were collected outside on a football field which representsrather good line-of-sight (LOS) conditions (Figure 3). Themeasured distance is shown on the left side marked with awhite line. Figure 4 shows the relation between the estimatedToF distance and the true distance. It can be seen that thestandard deviation of the measurements stays roughly constantover the whole distance measured. At certain distances, themeasurements largely deviate from the real distance. This
Figure 4. Resulting distance measurements and corresponding standarddeviation obtained from TW-ToF ranging experiments.
might be due to the transmitter’s synchronization in com-bination with constructive and destructive multi-path effects.The negative values occur due to subtraction of the calibratedoffset. An indoor setup has shown a stronger noise, but thelow transmit power of the current hardware platform could notestablish links above ∼ 10 m. A revised hardware platformwith higher transmit power settings will also show the NLOSperformance in the future.
V. SIMULATIVE EVALUATION
Based on the real data from the measurement campaign amodel to realistically simulate both RSS and ToF measure-ments was developed. The simulated data are then used forranging in a network. The measurement simulation, systemand measurement model as well as an analysis of the bimodallocalization setup is discussed in the following subsections.
A. RSS and ToF Simulation
The behavior of RSS and ToF measurements is simulatedwith a probabilistic model based on experimental data. Eachsimulated measurement is computed based on the real distanceand different bias and noise terms.
For the simulation of RSS values the Friis free spaceequation is used with additional modifications for differentenvironments. A linearly increasing negative bias dependingon the actual distance is added to model obstacles, e.g., wallsin the considered scenario. The bigger the distance, the higherthis wall attenuation factor (WAF) as the number of walls isalso likely to be higher. The WAF for each link in the networkis computed from a Gaussian distribution with a constant meanand a distance dependent standard deviation to account fordifferent types of walls and surroundings. Each packet’s RSS isthen computed based on the corresponding links WAF and anadditional noise term. In order to tune the model, the simulateddata were compared to real world data captured in differentenvironments. By comparing real and simulated data in termsof resulting standard deviations for all packets and for single
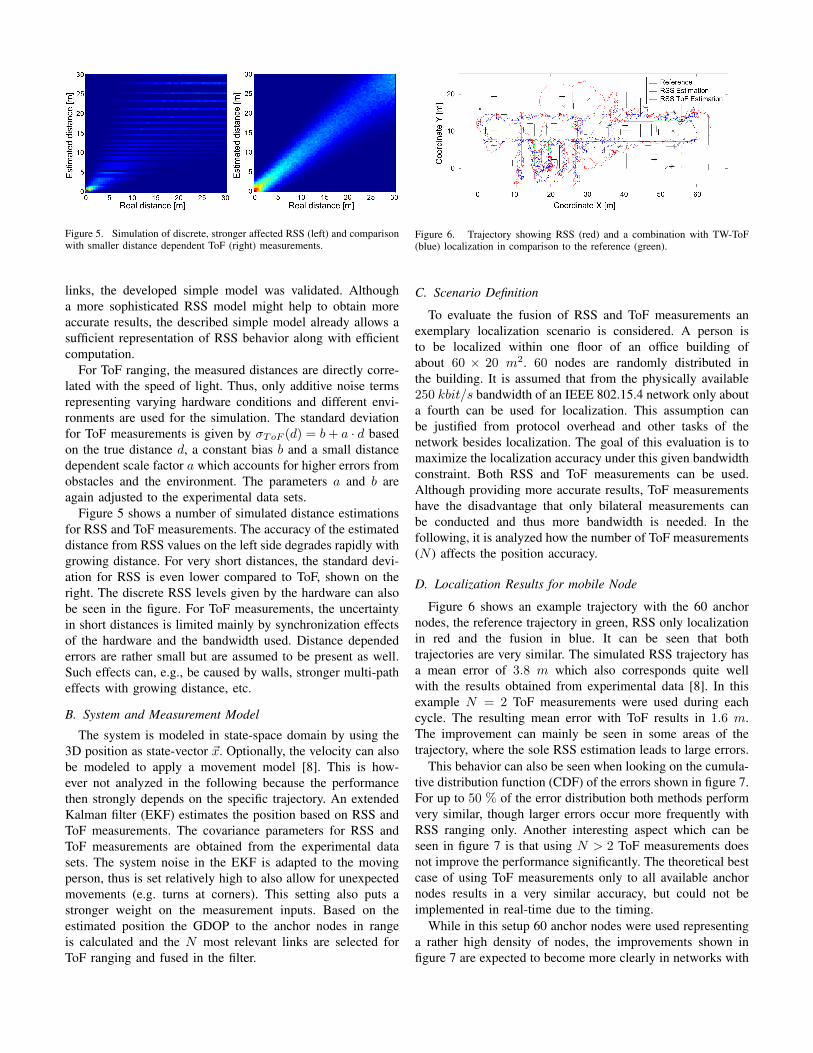
Figure 5. Simulation of discrete, stronger affected RSS (left) and comparisonwith smaller distance dependent ToF (right) measurements.
links, the developed simple model was validated. Althougha more sophisticated RSS model might help to obtain moreaccurate results, the described simple model already allows asufficient representation of RSS behavior along with efficientcomputation.
For ToF ranging, the measured distances are directly corre-lated with the speed of light. Thus, only additive noise termsrepresenting varying hardware conditions and different envi-ronments are used for the simulation. The standard deviationfor ToF measurements is given by σToF (d) = b+ a · d basedon the true distance d, a constant bias b and a small distancedependent scale factor a which accounts for higher errors fromobstacles and the environment. The parameters a and b areagain adjusted to the experimental data sets.
Figure 5 shows a number of simulated distance estimationsfor RSS and ToF measurements. The accuracy of the estimateddistance from RSS values on the left side degrades rapidly withgrowing distance. For very short distances, the standard devi-ation for RSS is even lower compared to ToF, shown on theright. The discrete RSS levels given by the hardware can alsobe seen in the figure. For ToF measurements, the uncertaintyin short distances is limited mainly by synchronization effectsof the hardware and the bandwidth used. Distance dependederrors are rather small but are assumed to be present as well.Such effects can, e.g., be caused by walls, stronger multi-patheffects with growing distance, etc.
B. System and Measurement Model
The system is modeled in state-space domain by using the3D position as state-vector ~x. Optionally, the velocity can alsobe modeled to apply a movement model [8]. This is how-ever not analyzed in the following because the performancethen strongly depends on the specific trajectory. An extendedKalman filter (EKF) estimates the position based on RSS andToF measurements. The covariance parameters for RSS andToF measurements are obtained from the experimental datasets. The system noise in the EKF is adapted to the movingperson, thus is set relatively high to also allow for unexpectedmovements (e.g. turns at corners). This setting also puts astronger weight on the measurement inputs. Based on theestimated position the GDOP to the anchor nodes in rangeis calculated and the N most relevant links are selected forToF ranging and fused in the filter.
Figure 6. Trajectory showing RSS (red) and a combination with TW-ToF(blue) localization in comparison to the reference (green).
C. Scenario Definition
To evaluate the fusion of RSS and ToF measurements anexemplary localization scenario is considered. A person isto be localized within one floor of an office building ofabout 60 × 20 m2. 60 nodes are randomly distributed inthe building. It is assumed that from the physically available250 kbit/s bandwidth of an IEEE 802.15.4 network only abouta fourth can be used for localization. This assumption canbe justified from protocol overhead and other tasks of thenetwork besides localization. The goal of this evaluation is tomaximize the localization accuracy under this given bandwidthconstraint. Both RSS and ToF measurements can be used.Although providing more accurate results, ToF measurementshave the disadvantage that only bilateral measurements canbe conducted and thus more bandwidth is needed. In thefollowing, it is analyzed how the number of ToF measurements(N ) affects the position accuracy.
D. Localization Results for mobile Node
Figure 6 shows an example trajectory with the 60 anchornodes, the reference trajectory in green, RSS only localizationin red and the fusion in blue. It can be seen that bothtrajectories are very similar. The simulated RSS trajectory hasa mean error of 3.8 m which also corresponds quite wellwith the results obtained from experimental data [8]. In thisexample N = 2 ToF measurements were used during eachcycle. The resulting mean error with ToF results in 1.6 m.The improvement can mainly be seen in some areas of thetrajectory, where the sole RSS estimation leads to large errors.
This behavior can also be seen when looking on the cumula-tive distribution function (CDF) of the errors shown in figure 7.For up to 50 % of the error distribution both methods performvery similar, though larger errors occur more frequently withRSS ranging only. Another interesting aspect which can beseen in figure 7 is that using N > 2 ToF measurements doesnot improve the performance significantly. The theoretical bestcase of using ToF measurements only to all available anchornodes results in a very similar accuracy, but could not beimplemented in real-time due to the timing.
While in this setup 60 anchor nodes were used representinga rather high density of nodes, the improvements shown infigure 7 are expected to become more clearly in networks with

much lower anchor node densities, as ranging has to rely moreoften on long distance links, thus using the benefits of ToF.
VI. CONCLUSION
In this paper a bi-modal localization scheme based onRSS and ToF ranging was presented. It has been shown thatRSS has many benefits in terms of network scalability andmight have a similar or better ranging accuracy for shortdistances. However, due to the susceptibility to environmentalinfluences the performance for growing distances degradesquickly. Therefore, ToF methods have shown promising rang-ing capabilities over a wide range of distances. A drawbackis that usually each link in a network has to be measuredseparately. The shown concept takes those effects into accountby sequentially processing RSS for rough positioning andToF on the most relevant links for accuracy improvements.Therefore, the GDOP to the anchor nodes is estimated and the’most promising’ anchor nodes are selected for ToF ranging. Inan example scenario the results show that the mean error couldbe decreased by about 50 %, especially for larger errors inRSS-only localization. This makes the concept very attractivefor localization of assets like sensors and tools in ad-hocscenarios.
VII. FUTURE WORK
With the experimental setup presented in this paper, onlydata from a LOS scenario could be evaluated, due to thelimited output power of the current hardware platform. Aradio chip with higher power output will demonstrate theadvantages of ToF and RSS fusion more clearly, becauselarger distances can be bridged and NLOS conditions can beevaluated. Furthermore, it is planned to evaluate the approachwith a UWB ToF system, in which the same trade-offs betweenscalability, accuracy and data throughput have to be made.In a UWB system, we expect even clearer results becausethe difference in accuracy between RSS and ToF ranging isbigger. From an algorithmic point of view, the selection ofimportant links might be interesting, e.g., by further evaluating
Figure 7. CDF comparing localization error of RSS and ToF fusion withdifferent numbers of ToF estimations.
the estimated accuracy or applying cluster analysis methods todetermine the most relevant links. Also the fusion of RSS, ToFand inertial signals might improve overall system performancebecause of a complementary short term stable system.
ACKNOWLEDGMENT
This work was supported by the German Research Foun-dation (DFG) within the Research Training Group GRK 1194”Self-organizing Sensor-Actuator Networks”. We would liketo thank the DFG for supporting our work.
REFERENCES
[1] J. Schmid, M. Volker, T. Gadeke, P. Weber, W. Stork, and K. D. Muller-Glaser, “An approach to infrastructure-independent person localizationwith an IEEE 802.15.4 WSN,” in Proc. Int Indoor Positioning andIndoor Navigation (IPIN) Conference, 2010.
[2] T. Gadeke, J. Schmid, W. Stork, and K. D. Muller-Glaser, “Pedestriandead reckoning as a complementary method for wireless sensor networkad-hoc person localization,” in Proceedings of the 1st InternationalConference on Sensor Networks (SENSORNETS), Rome, Italy, 2012.
[3] H. Liu, H. Darabi, P. Banerjee, and J. Liu, “Survey of Wireless IndoorPositioning Techniques and Systems,” IEEE Transactions on Systems,Man, and Cybernetics, Part C: Applications and Reviews, vol. 37, 2007.
[4] K. Lorincz and M. Welsh, “MoteTrack: a Robust, Decentralized Ap-proach to RF-based Location Tracking,” Personal and Ubiquitous Com-puting, vol. 11, no. 6, pp. 489–503, 2007.
[5] A. Paul and E. Wan, “Rssi-Based Indoor Localization and Tracking usingSigma-Point Kalman Smoothers,” Selected Topics in Signal Processing,IEEE Journal of, vol. 3, no. 5, pp. 860–873, 2009.
[6] K. Whitehouse, C. Karlof, and D. Culler, “A Practical Evaluation of Ra-dio Signal Strength for Ranging-Based Localization,” ACM SIGMOBILEMobile Computing and Communications Review, 2007.
[7] X. Li, “RSS-Based Location Estimation with Unknown Pathloss Model,”Wireless Communications, IEEE Transactions on, 2006.
[8] J. Schmid, T. Gaedeke, W. Stork, and K. D. Mueller-Glaser, “On thefusion of inertial data for signal strength localization,” in Proc. of the8th Workshop on Positioning, Navigation and Communication, 2011.
[9] N. B. Priyantha, “The cricket indoor location system,” Ph.D. dissertation,Massachusetts Institute of Technology, Juni 2005.
[10] A. Yazici, U. Yayan, and H. Yucel, “An ultrasonic based indoor posi-tioning system,” in Innovations in Intelligent Systems and Applications(INISTA), 2011 International Symposium on, Juni 2011, pp. 585–589.
[11] Z. Sahinoglu, S. Gezici, and I. Guvenc, Ultra-wideband PositioningSystems: Theoretical Limits, Ranging Algorithms, and Protocols. Cam-bridge University Press, Juni 2008.
[12] T. Karalar and J. Rabaey, “An rf tof based ranging implementation forsensor networks,” in Communications, 2006. ICC ’06. IEEE Interna-tional Conference on, vol. 7, Juni 2006, pp. 3347–3352.
[13] S. Lanzisera, D. Zats, and K. Pister, “Radio frequency time-of-flightdistance measurement for low-cost wireless sensor localization,” SensorsJournal, IEEE, vol. 11, no. 3, pp. 837–845, 2011.
[14] B. Thorbjornsen, N. White, A. Brown, and J. Reeve, “Radio frequency(rf) time-of-flight ranging for wireless sensor networks,” MeasurementScience and Technology, vol. 21, 2010.
[15] E. Mazomenos, D. De Jager, J. Reeve, and N. White, “A two-way timeof flight ranging scheme for wireless sensor networks,” Wireless SensorNetworks, pp. 163–178, 2011.
[16] S. Adler, S. Pfeiffer, H. Will, T. Hillebrandt, and J. Schiller, “Measuringthe distance between wireless sensor nodes with standard hardware,” inPositioning Navigation and Communication (WPNC), 2012 9th Work-shop on. IEEE, 2012, pp. 114–119.
[17] Y. Qi and H. Kobayashi, “On relation among time delay and signalstrength based geolocation methods,” in Proc. IEEE Global Telecom-munications Conf. GLOBECOM ’03, vol. 7, 2003, pp. 4079–4083.
[18] A. Bahillo, S. Mazuelas, R. Lorenzo, P. Fernandez, J. Prieto, R. Duran,and E. Abril, “Hybrid rss-rtt localization scheme for indoor wirelessnetworks,” EURASIP Journal on Advances in Signal Processing, 2010.
[19] D. Macii, A. Colombo, P. Pivato, and D. Fontanelli, “A data fusion tech-nique for wireless ranging performance improvement,” Instrumentationand Measurement, IEEE Transactions on, no. 99, 2012.
[20] R. Langley, “Dilution of precision,” GPS world, 1999.