Ringkasan Momentum Angular ARI SETIANI 4311411018
16
Tugas Kimia Kuantum Ari Setiani 4311411018 Rombel 1 RINGKASAN [BAB 4. MOMENTUM ANGULAR] THE QUANTUM IN CHEMISTRY: An Experimentalist’s View Roger Grinter School of Chemical Sciences and Pharmacy University of East Anglia 1
-
Upload
ari-setiani -
Category
Documents
-
view
26 -
download
0
description
4.1 PENDAHULUANDalam penerapan teori kimia kuantum, momentum sudut bisa dibilang sama pentingnya dengan energi. Memainkan bagian penting dalam spektroskopi dan teori struktur atom. Bahkan telah diusulkan, bahwa momentum sudut itu memainkan peran yang lebih penting daripada energi dalam menentukan hasil dari tabrakan intermolekular. Sebelum masuk ke teori kuantum momentum sudut, akan dijelaskan fenomena dalam istilah-istilah yang klasik.
Transcript of Ringkasan Momentum Angular ARI SETIANI 4311411018

Tugas Kimia Kuantum
Ari Setiani
4311411018
Rombel 1
RINGKASAN [BAB 4. MOMENTUM ANGULAR]
THE QUANTUMIN CHEMISTRY:An Experimentalist’s View
Roger Grinter
School of Chemical Sciences and PharmacyUniversity of East Anglia
1

4.1 PENDAHULUAN
Dalam penerapan teori kimia kuantum, momentum sudut bisa dibilang sama pentingnya dengan
energi. Memainkan bagian penting dalam spektroskopi dan teori struktur atom. Bahkan telah
diusulkan, bahwa momentum sudut itu memainkan peran yang lebih penting daripada energi
dalam menentukan hasil dari tabrakan intermolekular. Sebelum masuk ke teori kuantum
momentum sudut, akan dijelaskan fenomena dalam istilah-istilah yang klasik.
4.2 MOMENTUM ANGULAR DALAM MEKANIKA KLASIK
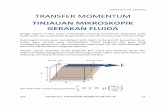
Misalkan massa (m) bergerak dengan kecepatan (v) dalam jalur melingkar (radius r) (Gambar
4.1). Pada setiap saat dalam waktu perputaran tubuh diarahkan pada sudut kanan garis yang
menghubungkan tubuh ke pusat lingkaran. Menurut definisi, momentum linear (p) dari tubuh
adalah produk dari massa dan kecepatan :
p = m v (1)
dan momentum sudut (a) adalah produk vektor p dan r, :
a = r × p = rp sin θ = rm v (2)
di mana θ adalah sudut antara r dan p . Jumlah dalam huruf tebal, r , v , p dan semua besaran
vektor , yaitu mereka memiliki kedua besaran dan arah . Vektor yang terletak di pusat lingkaran
sekitar yang berputar dan massa m, karena itu adalah produk vektor r dan p , arahnya adalah
pada sudut kanan terhadap bidang mengandung r dan p . Dalam rangka untuk menentukan
arah yang positif dan negatif untuk pertama kita mendefinisikan system koordinat tangan kanan
2
Gambar 1. Momentum sudut yang dihasilkan oleh massa yang mengorbit

( Gambar 1 ), yang merupakan salah satu di mana rotasi dari + x + y untuk kemajuan suatu
kidal sekrup sepanjang arah positif sumbu z.
Kemudian , jika v diarahkan dari + x + y terhadap momentum sudut yang dihasilkan
adalah positif, sedangkan jika arah gerakan adalah dari + y + xa adalah negatif . Dengan
demikian , dengan memutar roda pada poros kita baik yang dapat menghasilkan momentum
sudut positif atau negatif, tergantung pada arah rotasi . Momentum sudut sehingga dihasilkan
diwakili oleh vektor yang terletak sepanjang poros tersebut. Jika roda berputar dilihat dari + z,
searah jarum jam ( Gambar 3 ( a) ) dan
p = mv p = mv
(a) (b)
yang berlawanan arah jarum jam (Gambar 3 (b)) rotasi menghasilkan negatif (diarahkan jauh
dari pengamat) dan positif (diarahkan pengamat) momentum sudut masing-masing.
4.3 MOMENTUM ANGULAR SEBAGAI JUMLAH VEKTOR
Karena momentum angular adalah besaran vektor, maka momentum angular memiliki
komponen segala arah dalam ruang yang kita pilih untuk menentukan. Hal ini berguna untuk
dapat menentukan komponen sepanjang x, y dan z sumbu sistem koordinat Cartesian dan ini
3
Gambar 2.Dalam sistem koordinat tangan kanan, rotasi dari +X ke +Y kemajuan sekrup tangan kanan di positif Z-arah
Gambar 3.Momentum sudut yang dihasilkan oleh rotasi searah jarum jam dan berlawanan arah jarum jam

dapat dengan mudah dilakukan. Jika kita mengetahui sudut α, β dan γ antara momentum
angular vektor (a) dan x, y, dan z sumbu masing-masing, maka persamaan yang diperlukan
adalah :
ax = a cos α, ay = a cos β, az = a cos γ (3)
Momentum sudut klasik yang telah dijelaskan di atas juga disebut orbital momentum sudut
karena timbul sebagai akibat dari massa melaksanakan orbit di sekitar titik tetap.
4.4 MOMENTUM ANGULAR ORBITAL DI MEKANIKA KUANTUM
Momentum angular orbital juga ditemukan dalam mekanika kuantum, tapi kuantum dan klasik
orbital momentum sudut berbeda dalam dua aspek yang berkaitan dengan kuantisasi. Pertama,
dalam mekanika kuantum momentum sudut total quantised dengan besaran yang mungkin
diberikan oleh persamaan:
a =√d (d+1). h
2 π =√d (d+1). h (4)
di mana h adalah konstanta Planck dan d adalah bilangan kuantum yang dapat mengambil
semua nilai bilangan bulat positif, termasuk nol, yaitu d = 0 , 1 , 2 , 3 , ... Sebuah molekul
berputar bebas di angkasa memiliki momentum sudut dari jenis ini. Perhatikan bahwa jumlah
h/2π terjadi begitu sering dan sangat penting bahwa ia memiliki simbol sendiri (h ¯ ) yang
diucapkan 'h - salib '.
Apapun yang dipilih arah z dalam Persamaan (4.2), komponen quantised diperbolehkan
diberikan oleh persamaan :
az = md h/2π ≡ md h¯
dimana md adalah bilangan kuantum yang dapat mengambil semua nilai integer dari-d ke + d:
md = −d, −(d − 1), −(d − 2), . . . − 1, 0, +1, . . . + (d − 1), +d (6)
memberikan nilai-nilai 2d + 1 untuk md. Hasilnya dinyatakan dalam persamaan (4.4.1), (4.4.2)
dan (4.4.3) disimpulkan dari hubungan pergantian momentum sudut dalam kotak 4.1.
Jadi, untuk :
4
(7)
(5)
d = 0, md = 0
d = 1, md = −1, 0, +1
d = 2, md = −2, −1, 0, +1, etc.

4.5 OPERATOR MOMENTUM ANGULAR DAN ATURAN PERGANTIAN
Orbital momentum sudut (L) dari partikel tunggal tentang asal produk vektor jarak dari titik asal
(r) dan momentum linear (p):
L = r × p (B4.1.1)
Dalam Cartesian untuk mengkoordinasikan komponen L adalah::
Lx = ypz – zpy (B4.1.2a)
Ly = zpx – xpz (B4.1.2b)
Lz = xpy – ypx (B4.1.2c)
Perhatikan bagaimana komponen berturut-turut dapat diperoleh oleh siklik permutasi
dari
x → y → z → x . . .
Jika kita mengganti p oleh operator kuantum mekanik sesuai kita mendapatkan operator untuk
momentum sudut dalam satuan h/2π ≡ h¯ :
Lˆ x = −ih¯ {y∂/∂ z − z∂/∂y} (B4.1.3a)
Lˆ y = −ih¯ {z∂/∂ x − x∂/∂ z}
(B4.1.3b)
Lˆ z = −ih¯ {x∂/∂y − y∂/∂ x} (B4.1.3c)
Ketiga operator tidak bolak-balik satu sama lain, misalnya :
Lˆ x Lˆ y = −h¯ 2 {y∂/∂ z − z∂/∂y}{z∂/∂ x − x∂/∂ z}
= −h¯ 2 {y∂/∂ z[z∂/∂ x] − y∂/∂ z[x∂/∂ z] − z∂/∂y[z∂/∂ x] + z∂/∂y[x∂/∂ z]}
Istilah dalam tanda kurung siku harus dibedakan sebagai produk sehingga kita memiliki :
= −h¯ 2 {y∂/∂ x + yz∂ 2 /∂ z∂ x − yx ∂ 2 /∂ z2 − z2 ∂ 2 /∂y∂ x + zx∂ 2 /∂y∂ z}
Demikian pula :
5

Lˆ y Lˆ x = −h¯ 2 {z∂/∂ x − x∂/∂ z}{y∂/∂ z − z∂/∂y}
= −h¯ 2 {z∂/∂ x[y∂/∂ z] − z∂/∂ x[z∂/∂y] − x∂/∂ z[y∂/∂ z] + x∂/∂ z[z∂/∂y]}
= −h¯ 2 {zy∂ 2 /∂ x∂ z − z2 ∂ 2 /∂ x∂y − xy ∂ 2 /∂ z2 + x∂/∂y − xz∂ 2 /∂ z∂y}
Koordinat x, y dan z bolak-balik satu sama lain dan begitu juga operator untuk
diferensiasi parsial terhadap koordinat mereka. Oleh karena itu, yz ∂ 2 / ∂ z ∂ x = zy ∂ 2
/ ∂ x ∂ z dll, dan :
{Lˆ x Lˆ y−Lˆ y Lˆ x } = −h¯ 2 {y∂/∂ x − x∂/∂y} = −ih¯ · ih¯ {x∂/∂y − y∂/∂ x}
= ih¯ Lˆ z
Ini adalah hubungan pergantian antara operator untuk komponen Cartesian
momentum sudut. Simbol [a,b] = ab - ba, disebut komutator a dan b.
= Lˆ x Lˆ x Lˆ z − Lˆ x Lˆ z Lˆ x + Lˆ x Lˆ z Lˆ x − Lˆ z Lˆ x Lˆ x + Lˆ y Lˆ y Lˆ z − Lˆ y Lˆ z Lˆ
y + Lˆ y Lˆ z Lˆ y − Lˆ z Lˆ y Lˆ y
= Lˆ x (−ih¯ Lˆ y ) + (−ih¯ Lˆ y )Lˆ x + Lˆ y (ih¯ Lˆ x ) + (+ih¯ Lˆ x )Lˆ y = 0
Pada baris kedua di atas kita telah dikurangi dan kemudian ditambahkan L x L z L x dan L y L z
L y. Singkatnya:
[Lˆ 2 , Lˆ x ] = [Lˆ 2 , Lˆ y ] = [Lˆ 2 , Lˆ z ] = 0 (B4.1.5)
[L juga kemacetan dengan masing-masing komponen, tetapi itu adalah sederhana
untuk bekerja dengan L 2].
Dari Persamaan (B4.1.5) kita tahu bahwa ada satu set fungsi yang bersamaan
dengan fungsi eigen dari kedua Lˆ z and Lˆ 2 . Jika kita menggunakan bilangan kuantum
yang sesuai, M dan L, untuk mengkarakterisasi fungsi-fungsi yang menulis mereka
dalam bentuk |L, M, kita memiliki dua persamaan nilai eigen – fungsi eigen berikut, di
mana KL dan KM adalah nilai eigen untuk persegi total sudut momentum, dalam satuan
6
jadi: {Lˆ x Lˆ y − Lˆ y Lˆ x } ≡ [Lˆ x , Lˆ y ] =
ih¯ Lˆ z
(B4.1.4a)
demikian pula:
dan:
{Lˆ y Lˆ z − Lˆ z Lˆ y } ≡ [Lˆ y , Lˆ z ] = ih¯ Lˆ x
{Lˆ z Lˆ x − Lˆ x Lˆ z } ≡ [Lˆ z , Lˆ x ]
= ih¯ Lˆ y
(B4.1.4b)
(B4.1.4c)

h¯ ¯ 2, dan komponen z nya, dalam satuan h¯ , masing-masing:
Lˆ 2 |L, M = KL |L, M (B4.1.6)
dan
Lˆ z |L, M = KM |L, M (B4.1.7)
Mulai dari persamaan ini sekarang kita dapat menyimpulkan sifat yang paling penting
dari nilai eigen momentum angular :
dan
Dengan
demikian, fungsi |L, M juga merupakan fungsi eigen dari dan nilai eigen yang
merupakan jumlah kuadrat dari dua komponen momentum sudut positif sehingga :
KL ≥ (KM )2 (B4.1.11)
Kita sekarang dapat mendefinisikan dua operator baru, operator menaikkan dan
menurunkan, tangga atau langkah:
Lˆ + = Lˆ x + iLˆ y (B4.1.12a)
dan
Lˆ − = Lˆ x − iLˆ y (B4.1.12b)
Menggunakan aturan pergantian B4.1.4, kita dapat dengan mudah menunjukkan bahwa:
Lˆ z (Lˆ x + iLˆ y ) = (Lˆ x + iLˆ y )(Lˆ z + h¯ )
(B4.1.13a)
dan
Lˆ z (Lˆ x − iLˆ y ) = (Lˆ x − iLˆ y )(Lˆ z − h¯ )
(B4.1.13b)
Jika yang pertama dari dua urutan operasi yang diterapkan pada fungsi | L, M, maka kita
memiliki:
7

Lˆ z (Lˆ x + iLˆ y )|L, M = (Lˆ x + iLˆ y )(Lˆ z + h¯ )|L, M = (Lˆ x + iLˆ y )(KM + h¯ )|L, M
= (KM + h¯ )(Lˆ x + iLˆ y )|L, M = (KM + h¯ )Lˆ + |L, M
(B4.1.14a)
Jadi, (Lˆ x + iLˆ y )|L, M dapat dicari menggunakan fungsi eigen Lˆ z dengan nilai eigen
dari (KM + h¯ ). Sebab, Lˆ 2 diganti dengan Lˆ x and Lˆ y dan juga diganti oleh Lˆ+ dan fungsi
eigen (Lˆ x + iLˆ y )|L, M tersisa fungsi eigen dariLˆ 2 dengan nilai eigen KL. Jadi, kita tahu
bahwa (Lˆ x − iLˆ y )|L, M a dalah fungsi eigen dari Lˆ z dengan nilai eigen dari (KM − h¯ )
yang menggantikan fungsi eigen dari Lˆ 2 dengan nilai eigen KL :
Lˆ z (Lˆ x − iLˆ y )|L, M = (KM + h¯ )(Lˆ x − iLˆ y )|L, M = (KM − h¯
)Lˆ − |L, M
(B4.1.14b)
Oleh karena itu, kami memiliki serangkaian fungsi eigen Lˆ 2 and Lˆ z , semua dengan nilai
eigen KL for Lˆ 2 tetapi dengan urutan berikut nilai eigen dari Lˆ z :
. . . (KM − 3h¯ ), (KM − 2h¯ ), (KM − h¯ ), KM , (KM + h¯ ), (KM + 2h¯ ), (KM + 3h¯ )
. . .
Seri harus berhenti di kedua ujungnya karena KL ≥ (KM)2. Jadi, jika kita menunjukkan nilai
tertinggi oleh KM dan terendah oleh KM urutan lengkap :
KM . . . (KM − 2h¯ ), (KM − h¯ ), KM , (KM + h¯ ), (KM + 2h¯ ) . . . KM
(B4.1.15)
Oleh karena itu, jika fungsi eigen yang sesuai adalah |L, M and |L, M kita harus punya :
Lˆ + |L, M = 0 (B4.1.16a)
dan
Lˆ − |L, M = 0 (B4.1.16b)
Menerapkan Lˆ - untuk Persamaan (B4.1.16a) kita memiliki :
8

Jadi : KL = (KM )2 + h¯ KM
(B4.1.17a)
Dengan mengoperasikan dengan Lˆ + pada Persamaan (B4.1.16b) kita juga bisa menunjukkan
bahwa:
KL = (KM )2 − h¯ KM
(B4.1.17b)
Dalam rangka untuk memenuhi Persamaan (B4.1.17a) dan (B4.1.17b) dan harus konsisten
dengan asumsi bahwa KM < KM
kita harus memiliki KM
= −KM . Selanjutnya, urutan
(Persamaan (B4.1.15)) mensyaratkan bahwa KM lebih besar dari KM
dengan jumlah integral
unit h¯. Dengan demikian, KM harus menjadi bentuk nh- di mana n adalah bilangan bulat,
termasuk 0, atau setengah integer. Sejauh ini kita telah terpasang ada signifikansi khusus
untuk L. Oleh karena itu, KM karena hanya bergantung pada L kita dapat menetapkan n = L
dan kami memiliki:
KM = Lh¯ (B4.1.18)
Menggunakan Persamaan (B4.1.17a)
KL = (Lh¯ )2 + h¯ Lh¯
atau
KL = L(L + 1)h¯ 2 (B4.1.19)
Sekarang, nilai yang mungkin dari KM adalah:
Dan M, yang telah kita terpasang tidak penting tertentu belum, bisa digunakan untuk
mengkarakterisasi ini urutan nilai KM:
KM = M h¯ , L ≥ M ≥ −L (B4.1.21)
Jika L adalah M bilangan bulat adalah integer, jika L adalah setengah-integral demikian pula M.
Persamaan (B4.1.6) dan (B4.1.7) sekarang dapat ditulis:
9

Lˆ 2 |L, M = L(L+1)h¯ 2 |L, M (B4.1.22b)
And
Lˆ z |L, M = M h¯ |L, M (B4.1.22b)
Tugas utama dari operator ini, sebvagai pengurangan aturan pergantian untuk momentum
sudut orbital dan dari mereka Persamaan (B4.1.22a) dan (B4.1.22b), kini telah dicapai. Tapi
dalam proses kita juga 'menemukan' kesadaran dan operator menurunkan, L+ dan L- yang kita
temukan sangat berguna dalam buku ini.
Kita sekarang dalam posisi untuk memeriksa properti mereka sedikit lebih dekat. Kami
menemukan bahwa, dalam satuan h-, ketika L+ diterapkan | L, M kita mendapatkan sebuah
fungsi eigen dari L z dengan nilai eigen dari (M + 1) yang masih merupakan fungsi eigen dari L
2 dengan nilai yang sama dari bilangan kuantum L. Demikian pula, kami menemukan bahwa L -
| L, M adalah fungsi eigen dari L 2, dengan nilai yang sama L, dan L z dengan nilai eigen (M -
1).
Persamaan (B4.1.23a) dan (B4.1.23b) :
Lˆ + |L, M = C+ |L, M + 1 (B4.1.23a)
Lˆ − |L, M = C− |L, M − 1 (B4.1.23b)
C + dan C-adalah nomor yang mungkin hasil dari operasi dengan L+ dan L- pada| L, M. Laporan
tepat di atas tidak akan berlaku jika hasil fungsi eigen yang dikalikan dengan konstanta tersebut
dan kita perlu menentukan nilai-nilai mereka. Kompleks konjugasi (Lampiran 8) Persamaan
(B4.1.23a) adalah:
{Lˆ + |L, M }∗ = {C+ |L, M + 1 }∗ (B4.1.24)
Tetapi, {Lˆ + }∗ = Lˆ − , |L, M ∗ = L, M | dan |L, M + 1 ∗ = L, M + 1|, dan
persamaan (B4.1.24) dapat ditulis :
L, M |Lˆ − = C+∗ L, M + 1| (B4.1.25)
Jika sekarang kita kalikan sisi kanan dan kiri Persamaan (B4.1.23a), pada kiri, oleh pihak yang
10

sama Persamaan (B4.1.25) kita memperoleh Persamaan (B4.1.26):
L, M |Lˆ − Lˆ + |L, M = C+ C+∗ L, M + 1|L, M + 1 = C+ C+
∗ (B4.1.26)
Sisi kanan mengurangi ke C+ C+* karena α | β berarti mengintegrasikan produk αβ atas semua
ruang dan karena itu L, M + 1 | L, M + 1 = 1 jika eigenfunctions yang dinormalisasi, yang kita
pasti meminta mereka untuk menjadi. Operator produk L– dan L+ bisa dievaluasi dengan
menggunakan rumus (B4.1.4) dan (B4.1.12) dan kita menemukan, dalam satuan h¯, bahwa :
Disana
karena L, M | L, M = 1 untuk eigenfunctions normal. Akhirnya, membandingkan persamaan-
tions (B4.1.26) dan (B4.1.28) kita memiliki:
C+ C+ ∗ = L(L + 1) − M(M + 1)
Oleh karena itu, karena tidak ada alasan untuk menganggap bahwa C + adalah apa pun selain
nyata:
C+ ∗ = C+ = {L(L + 1) − M(M + 1)} 2 (B4.1.29)
Perkembangan analog mulai dari Persamaan (B4.1.23b) memberikan:
C− ∗ = C− = {L(L + 1) − M(M − 1)} 2 (B4.1.30)
dan bentuk lengkap Persamaan (B4.1.23a) dan (B4.1.23b) adalah:
Lˆ + |L, M = {L(L + 1) − M(M + 1)} 2 |L, M + 1 (B4.1.31a)
Lˆ − |L, M = {L(L + 1) − M(M − 1)} 2 |L, M − 1 (B4.1.31b)
11

12