Pengolahan data A (1).pdf
24
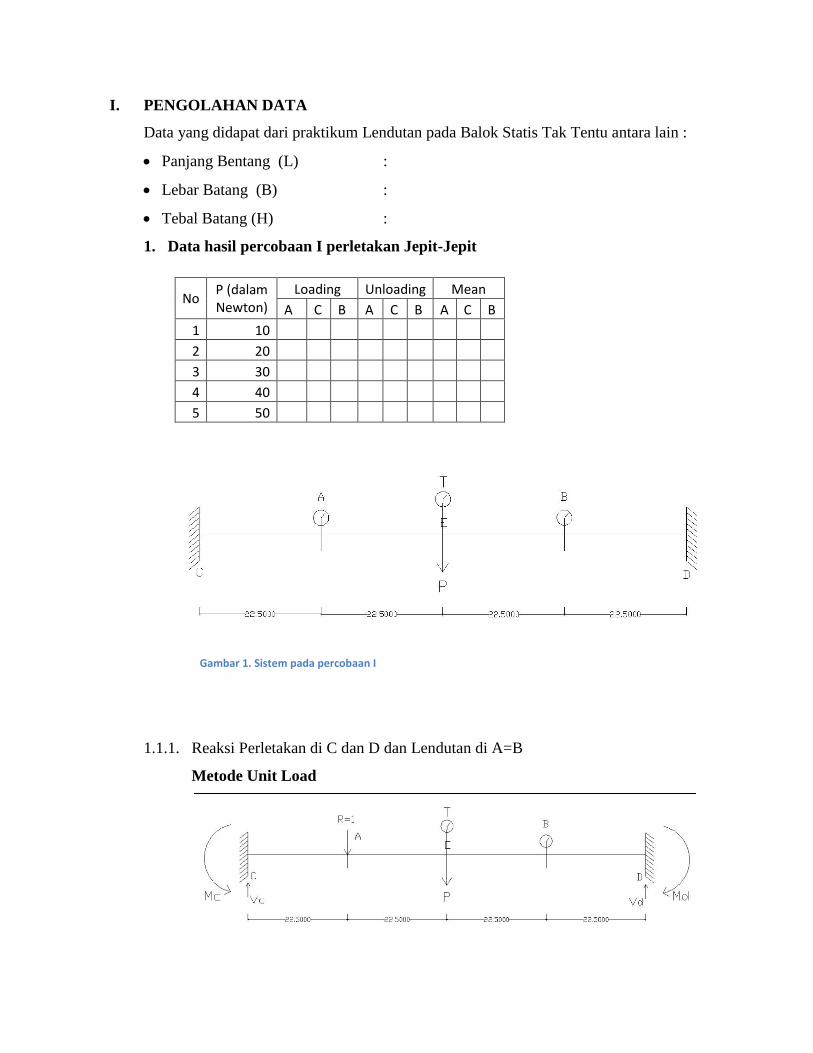
I. PENGOLAHAN DATA Data yang didapat dari praktikum Lendutan pada Balok Statis Tak Tentu antara lain : Panjang Bentang (L) : Lebar Batang (B) : Tebal Batang (H) : 1. Data hasil percobaan I perletakan Jepit-Jepit No P (dalam Newton) Loading Unloading Mean A C B A C B A C B 1 10 2 20 3 30 4 40 5 50 Gambar 1. Sistem pada percobaan I 1.1.1. Reaksi Perletakan di C dan D dan Lendutan di A=B Metode Unit Load
-
Upload
luthfiy-muhaimin -
Category
Documents
-
view
217 -
download
0
description
bnb
Transcript of Pengolahan data A (1).pdf
I. PENGOLAHAN DATA
Data yang didapat dari praktikum Lendutan pada Balok Statis Tak Tentu antara lain :
Panjang Bentang (L) :
Lebar Batang (B) :
Tebal Batang (H) :
1. Data hasil percobaan I perletakan Jepit-Jepit
No P (dalam Newton)
Loading Unloading Mean
A C B A C B A C B
1 10
2 20
3 30
4 40
5 50
Gambar 1. Sistem pada percobaan I
1.1.1. Reaksi Perletakan di C dan D dan Lendutan di A=B
Metode Unit Load

Gaya Real P
Diketahui bahwa :
Mc = 1
8 𝑃𝐿 =
1
8× 900 × 𝑃 = 112.5𝑃 𝑁
Md = 1
8 𝑃𝐿 =
1
8× 900 × 𝑃 = 112.5𝑃 𝑁
Vc =1
2𝑃 = 0.5𝑃
Vd =1
2𝑃 = 0.5𝑃
Redundant di A (beban 1 satuan di A)
Diketahui bahwa :
Mc = 𝑥(𝐿−𝑥)²
𝐿²× 𝑃 dan Md =
𝑥²(𝐿−𝑥)
𝐿²× 𝑃
Sehingga didapat,
Mc = 225(900−225)²
900²× 𝑃 = ⋯ 𝑁𝑚𝑚
Md = 225²(900−225)
900²× 𝑃 = ⋯ 𝑁𝑚𝑚
Persamaan kesetimbangan di titik C:
∑ 𝑀𝑐 = 0
Vd = … N
∑ 𝑀𝑑 = 0
Vc = … N
Menentukan Persamaan lendutan di A= B
CA (0 ≤ x ≤ 225)
Mx = …
mx = …
AE (0 ≤ x ≤ 225)
Mx = …
mx = …
EB (0 ≤ x ≤ 225)
Mx = …
mx = …
BD (0 ≤ x ≤ 225)
Mx = …
mx = …
Persamaan Lendutan di A
δA teori = ∫𝑀𝑥𝑚𝑥
𝐸𝐼 𝑑𝑥𝐿
0
δA teori = 𝑠𝑒𝑘𝑖𝑎𝑛 𝑃
𝐸𝐼
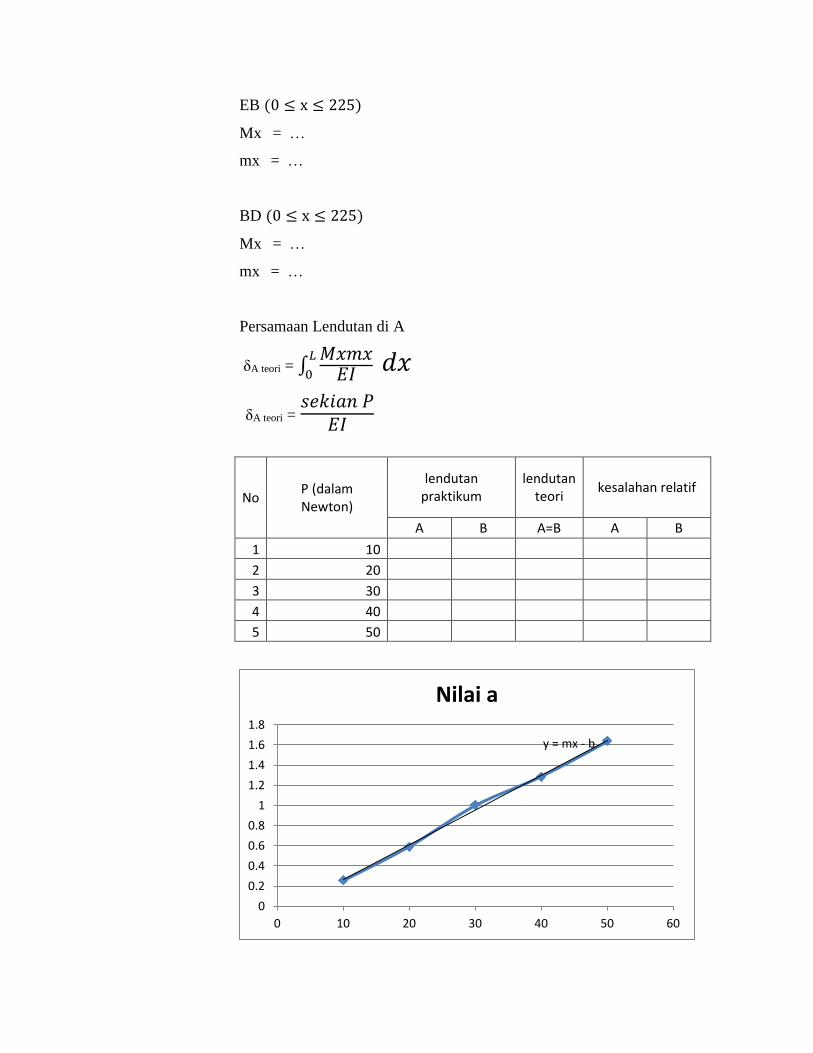
No P (dalam Newton)
lendutan praktikum
lendutan teori
kesalahan relatif
A B A=B A B
1 10
2 20
3 30
4 40
5 50
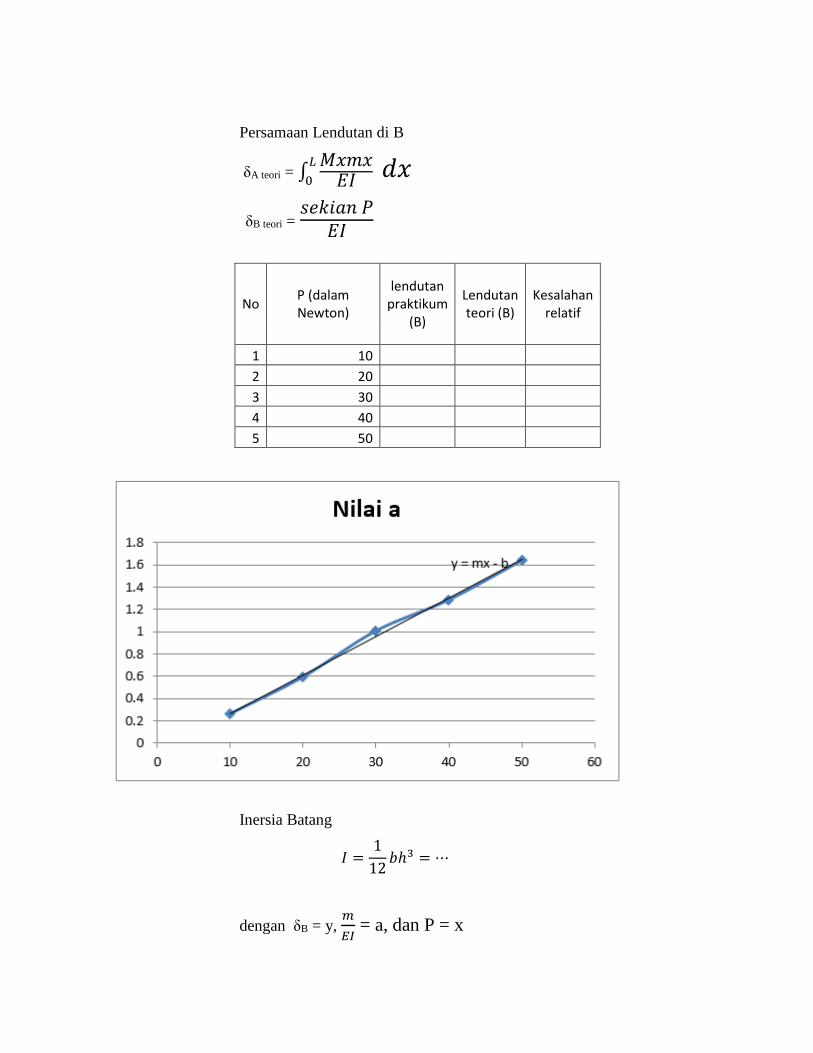
y = mx - b
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0 10 20 30 40 50 60
Nilai a

Inersia Batang
𝐼 =1
12𝑏ℎ3 = ⋯
dengan δA = y, 𝑚
𝐸𝐼 = a, dan P = x
𝑦 = 𝑎𝑥
𝑎 =𝑦
𝑥
𝑎 =δa
𝑃
𝑎 =𝑠𝑒𝑘𝑖𝑎𝑛
𝐸𝐼
𝐸 𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 =𝑠𝑒𝑘𝑖𝑎𝑛
𝑎𝐼
Kesalahan Relatif E
𝐾𝑅 = |𝐸𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 − 𝐸𝑡𝑒𝑜𝑟𝑖
𝐸𝑡𝑒𝑜𝑟𝑖| 𝑥100%
1.1.2. Reaksi Perletakan di C dan D dan Lendutan di E
Gaya Real P
Sama seperti di lendutan A=B
Redundant di E (beban 1 satuan di E)
Diketahui bahwa :
1 ¼ L ¼ L
½ L
Mc = 𝑥(𝐿−𝑥)²
𝐿²× 𝑃 dan Md =
𝑥²(𝐿−𝑥)
𝐿²× 𝑃
Sehingga didapat,
Mc = … 𝑁𝑚𝑚
Md = … 𝑁𝑚𝑚
Persamaan kesetimbangan di titik C:
∑ 𝑀𝑐 = 0
Vd = … N
∑ 𝑀𝑑 = 0
Vc = … N
Menentukan Persamaan lendutan di E
CA (0 ≤ x ≤ 225)
Mx = …
mx = …
AE (0 ≤ x ≤ 225)
Mx = …
mx = …
EB (0 ≤ x ≤ 225)
Mx = …
mx = …
BD (0 ≤ x ≤ 225)
Mx = …
mx = …
Persamaan Lendutan di E
ΔE teori = ∫𝑀𝑥𝑚𝑥
𝐸𝐼 𝑑𝑥𝐿
0
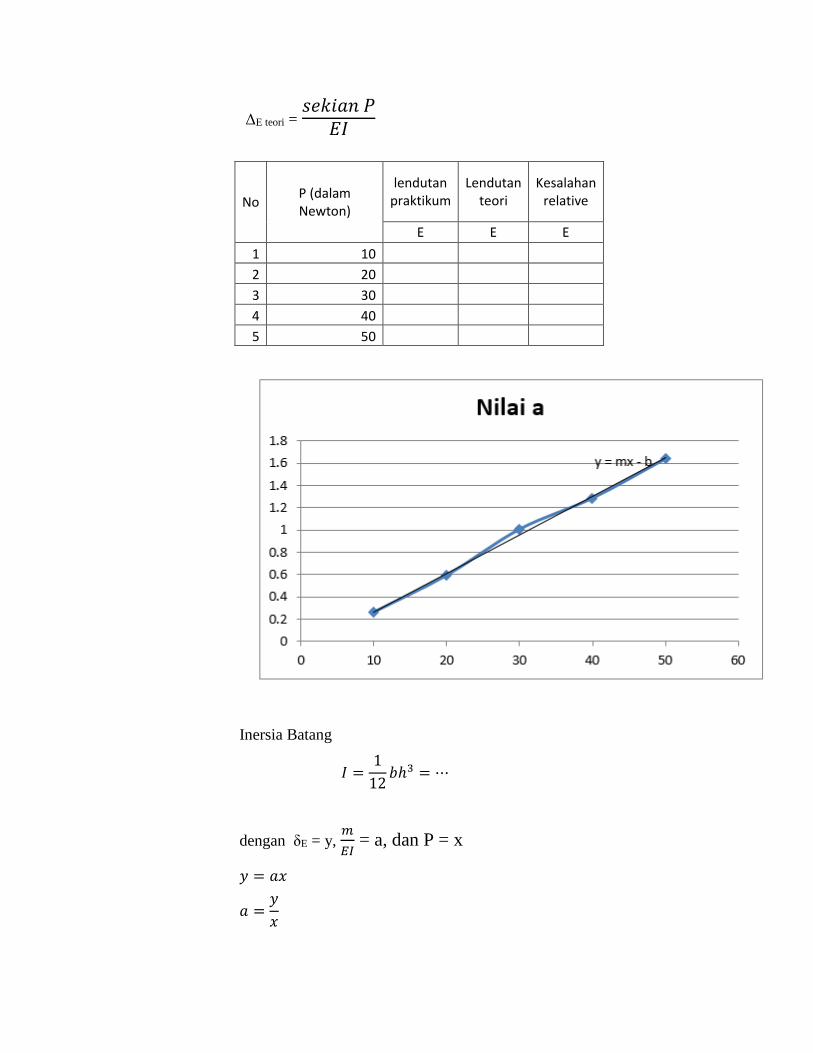
ΔE teori = 𝑠𝑒𝑘𝑖𝑎𝑛 𝑃
𝐸𝐼
No P (dalam Newton)
lendutan praktikum
Lendutan teori
Kesalahan relative
E E E
1 10
2 20
3 30
4 40
5 50
Inersia Batang
𝐼 =1
12𝑏ℎ3 = ⋯
dengan δE = y, 𝑚
𝐸𝐼 = a, dan P = x
𝑦 = 𝑎𝑥
𝑎 =𝑦
𝑥

𝑎 =δa
𝑃
𝑎 =𝑠𝑒𝑘𝑖𝑎𝑛
𝐸𝐼
𝐸 𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 =𝑠𝑒𝑘𝑖𝑎𝑛
𝑎𝐼
Kesalahan Relatif E
𝐾𝑅 = |𝐸𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 − 𝐸𝑡𝑒𝑜𝑟𝑖
𝐸𝑡𝑒𝑜𝑟𝑖| 𝑥100%
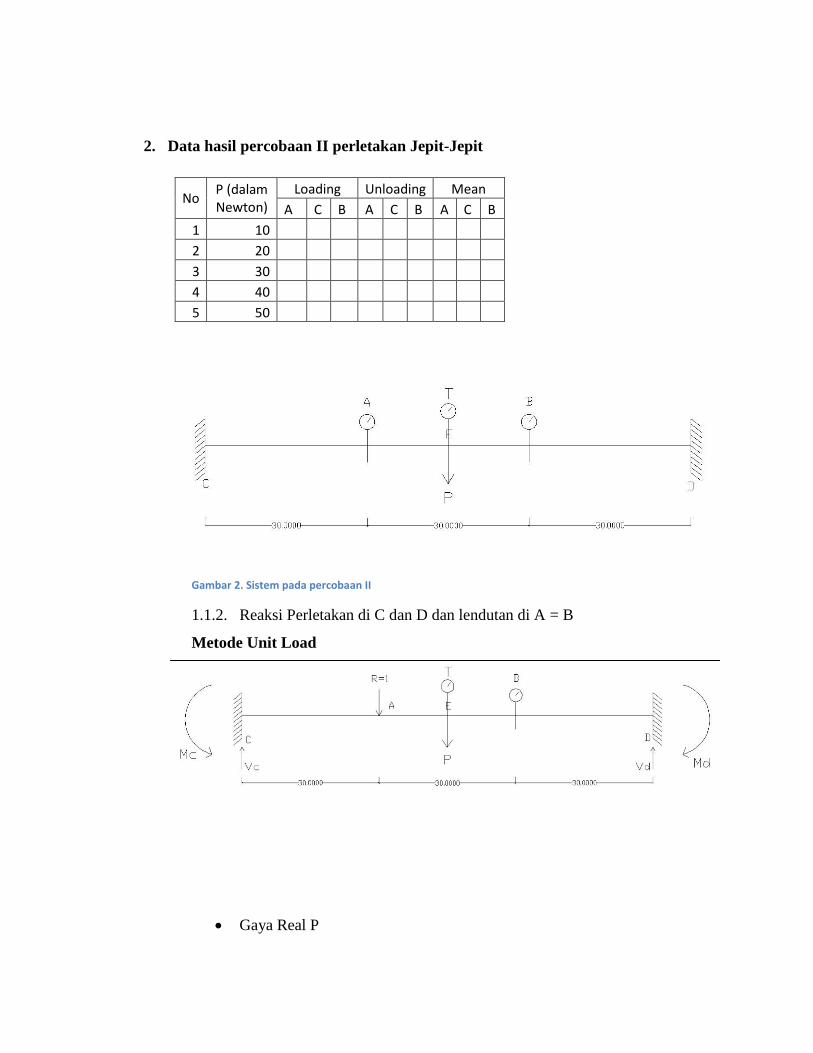
2. Data hasil percobaan II perletakan Jepit-Jepit
No P (dalam Newton)
Loading Unloading Mean
A C B A C B A C B
1 10
2 20
3 30
4 40
5 50
Gambar 2. Sistem pada percobaan II
1.1.2. Reaksi Perletakan di C dan D dan lendutan di A = B
Metode Unit Load
Gaya Real P
Diketahui bahwa :
Mc = 1
8 𝑃𝐿 =
1
8× 900 × 𝑃 = 112.5𝑃 𝑁
Md = 1
8 𝑃𝐿 =
1
8× 900 × 𝑃 = 112.5𝑃 𝑁
Vc =1
2𝑃 = 0.5𝑃
Vd =1
2𝑃 = 0.5𝑃
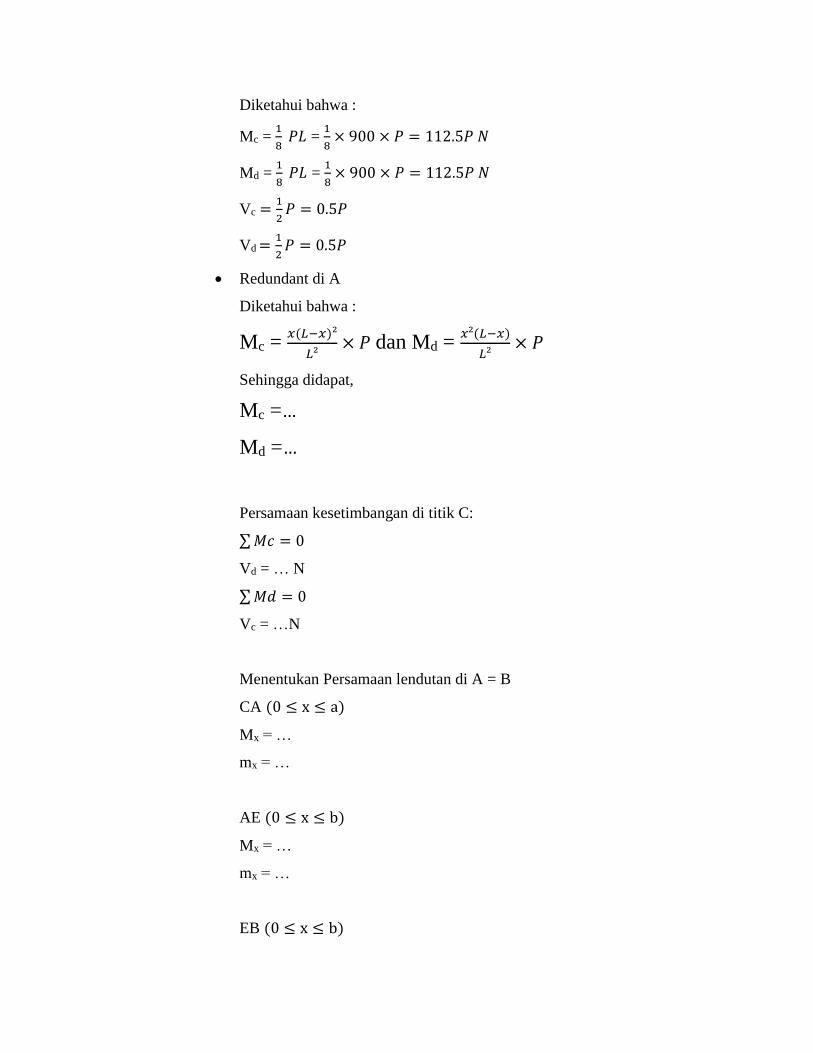
Redundant di A
Diketahui bahwa :
Mc = 𝑥(𝐿−𝑥)²
𝐿²× 𝑃 dan Md =
𝑥²(𝐿−𝑥)
𝐿²× 𝑃
Sehingga didapat,
Mc =…
Md =…
Persamaan kesetimbangan di titik C:
∑ 𝑀𝑐 = 0
Vd = … N
∑ 𝑀𝑑 = 0
Vc = …N
Menentukan Persamaan lendutan di A = B
CA (0 ≤ x ≤ a)
Mx = …
mx = …
AE (0 ≤ x ≤ b)
Mx = …
mx = …
EB (0 ≤ x ≤ b)

Mx = …
mx = …
BD (0 ≤ x ≤ a)
Mx = …
mx = …
Persamaan Lendutan di A
δA teori = ∫𝑀𝑥𝑚𝑥
𝐸𝐼 𝑑𝑥𝐿
0
δA teori = 𝑠𝑒𝑘𝑖𝑎𝑛 𝑃
𝐸𝐼
No P (dalam Newton)
lendutan praktikum
lendutan teori
kesalahan relatif
A B A=B A B
1 10
2 20
3 30
4 40
5 50

Inersia Batang
𝐼 =1
12𝑏ℎ3 = ⋯
dengan δA = y, 𝑚
𝐸𝐼 = a, dan P = x
𝑦 = 𝑎𝑥
𝑎 =𝑦
𝑥
𝑎 =δa
𝑃
𝑎 =𝑠𝑒𝑘𝑖𝑎𝑛
𝐸𝐼
𝐸 𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 =𝑠𝑒𝑘𝑖𝑎𝑛
𝑎𝐼
Kesalahan Relatif E
𝐾𝑅 = |𝐸𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 − 𝐸𝑡𝑒𝑜𝑟𝑖
𝐸𝑡𝑒𝑜𝑟𝑖| 𝑥100%
2.1.1. Reaksi Perletakan di C dan D dan Lendutan di E
Gaya Real P
Sama seperti di lendutan A=B
Redundant di E (beban 1 satuan di E)
Diketahui bahwa :
Mc = 𝑥(𝐿−𝑥)²
𝐿²× 𝑃 dan Md =
𝑥²(𝐿−𝑥)
𝐿²× 𝑃
1 a a
L-2a
Sehingga didapat,
Mc = … 𝑁𝑚𝑚
Md = … 𝑁𝑚𝑚
Persamaan kesetimbangan di titik C:
∑ 𝑀𝑐 = 0
Vd = … N
∑ 𝑀𝑑 = 0
Vc = … N
Menentukan Persamaan lendutan di E
CA (0 ≤ x ≤ 225)
Mx = …
mx = …
AE (0 ≤ x ≤ 225)
Mx = …
mx = …
EB (0 ≤ x ≤ 225)
Mx = …
mx = …
BD (0 ≤ x ≤ 225)
Mx = …
mx = …
Persamaan Lendutan di E
ΔE teori = ∫𝑀𝑥𝑚𝑥
𝐸𝐼 𝑑𝑥𝐿
0
ΔE teori = 𝑠𝑒𝑘𝑖𝑎𝑛 𝑃
𝐸𝐼

No P (dalam Newton)
lendutan praktikum
Lendutan teori
Kesalahan relative
E E E
1 10
2 20
3 30
4 40
5 50
Inersia Batang
𝐼 =1
12𝑏ℎ3 = ⋯
dengan δE = y, 𝑚
𝐸𝐼 = a, dan P = x
𝑦 = 𝑎𝑥
𝑎 =𝑦
𝑥
𝑎 =δa
𝑃
𝑎 =𝑠𝑒𝑘𝑖𝑎𝑛
𝐸𝐼

𝐸 𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 =𝑠𝑒𝑘𝑖𝑎𝑛
𝑎𝐼
Kesalahan Relatif E
𝐾𝑅 = |𝐸𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 − 𝐸𝑡𝑒𝑜𝑟𝑖
𝐸𝑡𝑒𝑜𝑟𝑖| 𝑥100%

3. Data hasil percobaan III perletakan Rol-Jepit
No P (dalam Newton)
Loading Unloading Mean
A C B A C B A C B
1 10
2 20
3 30
4 40
5 50
Gambar 3. Sistem pada percobaan III
1.1.3. Reaksi Perletakan di C dan D dan Lendutan di A dan B
Metode Konsisten Deformasi

CE (0 ≤ 𝑥 ≤ 450)
𝑀𝑥 = ⋯
𝑚𝑥 = ⋯
ED (0 ≤ 𝑥 ≤ 450)
𝑀𝑥 = ⋯
𝑚𝑥 = ⋯
Persamaaan Kompatibilitas
∆𝑐 + 𝑉𝑐∆𝑐𝑐= 0
𝑉𝑐 = ⋯
∑ 𝑉 = 0
𝑉𝐷 = …
∑ 𝑀𝐷 = 0
𝑀𝐷 = ⋯
Mencari nilai 𝛿𝐴 dan 𝛿𝐵
Mencari nilai Vd, Vc dan Md ketika beban 1 satuan di titik A dengan deformasi
konsisten

Menentukan Persamaan lendutan di A
CA (0 ≤ x ≤ 225)
Mx = …
mx = …
AE (0 ≤ x ≤ 225)
Mx = …
mx = …
EB (0 ≤ x ≤ 225)
Mx = …
mx = …
BD (0 ≤ x ≤ 225)
Mx = …
mx = …
Persamaan Lendutan di A
δA teori = ∫𝑀𝑥𝑚𝑥
𝐸𝐼 𝑑𝑥𝐿
0
δA teori = 𝑠𝑒𝑘𝑖𝑎𝑛 𝑃
𝐸𝐼
1

No P (dalam Newton)
lendutan praktikum
(A)
Lendutan teori (A)
Kesalahan relatif
1 10
2 20
3 30
4 40
5 50
Inersia Batang
𝐼 =1
12𝑏ℎ3 = ⋯
dengan δA = y, 𝑚
𝐸𝐼 = a, dan P = x
𝑦 = 𝑎𝑥
𝑎 =𝑦
𝑥
𝑎 =δa
𝑃
𝑎 =𝑠𝑒𝑘𝑖𝑎𝑛
𝐸𝐼

𝐸 𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 =𝑠𝑒𝑘𝑖𝑎𝑛
𝑎𝐼
Kesalahan Relatif E
𝐾𝑅 = |𝐸𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 − 𝐸𝑡𝑒𝑜𝑟𝑖
𝐸𝑡𝑒𝑜𝑟𝑖| 𝑥100%
Mencari nilai Vd, Vc dan Md ketika beban 1 satuan di titik B dengan deformasi
konsisten
Menentukan Persamaan lendutan di B
CA (0 ≤ x ≤ 225)
Mx = …
mx = …
AE (0 ≤ x ≤ 225)
Mx = …
mx = …
EB (0 ≤ x ≤ 225)
Mx = …
mx = …
BD (0 ≤ x ≤ 225)
Mx = …
mx = …
1
Persamaan Lendutan di B
δA teori = ∫𝑀𝑥𝑚𝑥
𝐸𝐼 𝑑𝑥𝐿
0
δB teori = 𝑠𝑒𝑘𝑖𝑎𝑛 𝑃
𝐸𝐼
No P (dalam Newton)
lendutan praktikum
(B)
Lendutan teori (B)
Kesalahan relatif
1 10
2 20
3 30
4 40
5 50
Inersia Batang
𝐼 =1
12𝑏ℎ3 = ⋯
dengan δB = y, 𝑚
𝐸𝐼 = a, dan P = x
𝑦 = 𝑎𝑥
𝑎 =𝑦
𝑥
𝑎 =δa
𝑃
𝑎 =𝑠𝑒𝑘𝑖𝑎𝑛
𝐸𝐼
𝐸 𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 =𝑠𝑒𝑘𝑖𝑎𝑛
𝑎𝐼
Kesalahan Relatif E
𝐾𝑅 = |𝐸𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 − 𝐸𝑡𝑒𝑜𝑟𝑖
𝐸𝑡𝑒𝑜𝑟𝑖| 𝑥100%
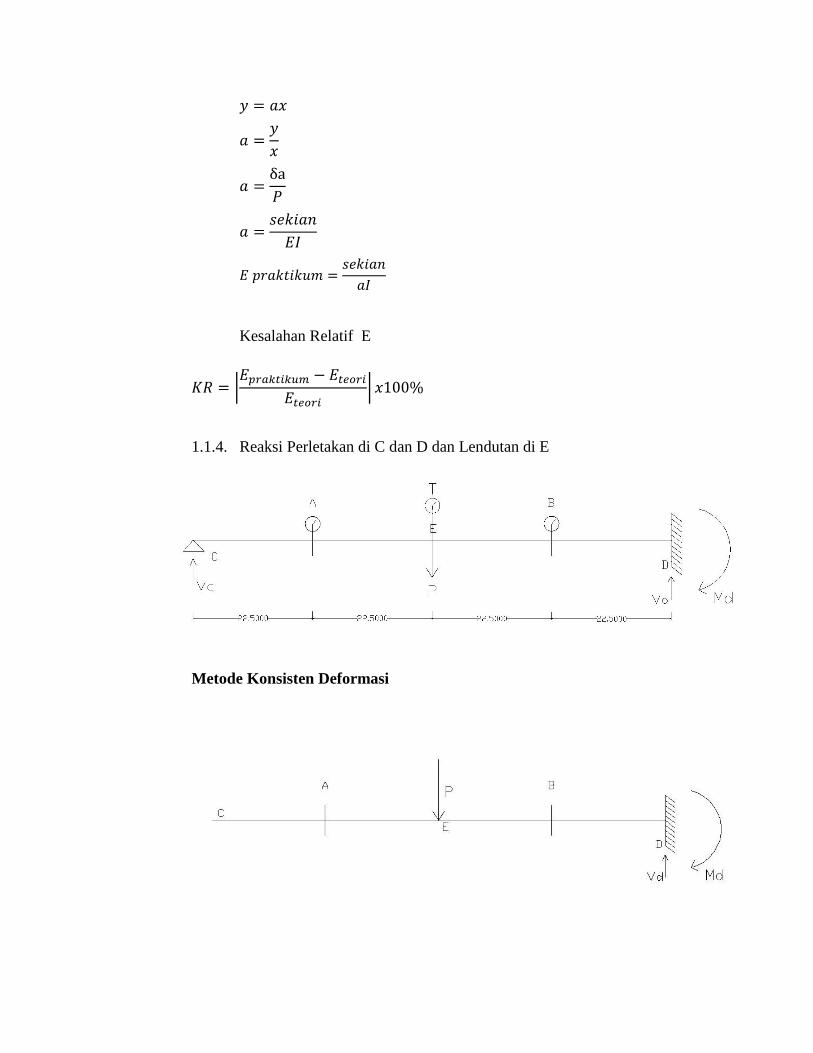
1.1.4. Reaksi Perletakan di C dan D dan Lendutan di E
Metode Konsisten Deformasi
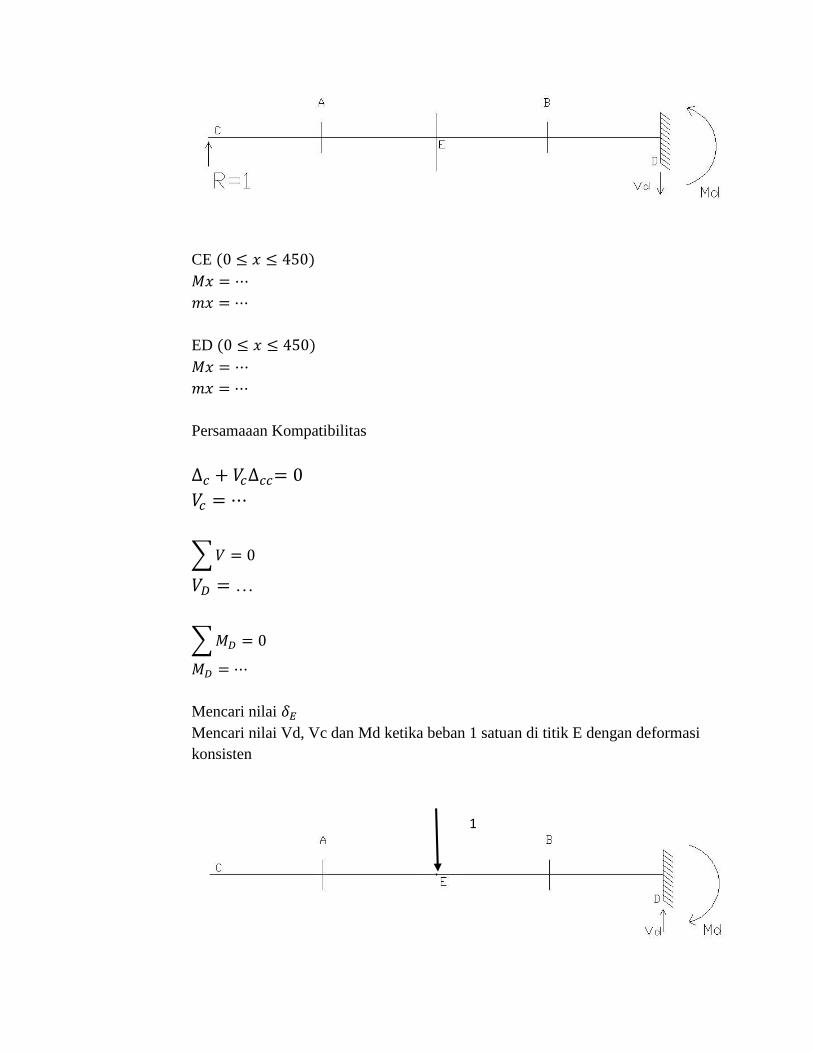
CE (0 ≤ 𝑥 ≤ 450)
𝑀𝑥 = ⋯
𝑚𝑥 = ⋯
ED (0 ≤ 𝑥 ≤ 450)
𝑀𝑥 = ⋯
𝑚𝑥 = ⋯
Persamaaan Kompatibilitas
∆𝑐 + 𝑉𝑐∆𝑐𝑐= 0
𝑉𝑐 = ⋯
∑ 𝑉 = 0
𝑉𝐷 = …
∑ 𝑀𝐷 = 0
𝑀𝐷 = ⋯
Mencari nilai 𝛿𝐸
Mencari nilai Vd, Vc dan Md ketika beban 1 satuan di titik E dengan deformasi
konsisten
1

Menentukan Persamaan lendutan di E
CA (0 ≤ x ≤ 225)
Mx = …
mx = …
AE (0 ≤ x ≤ 225)
Mx = …
mx = …
EB (0 ≤ x ≤ 225)
Mx = …
mx = …
BD (0 ≤ x ≤ 225)
Mx = …
mx = …
Persamaan Lendutan di E
ΔE teori = ∫𝑀𝑥𝑚𝑥
𝐸𝐼 𝑑𝑥𝐿
0
ΔE teori = 𝑠𝑒𝑘𝑖𝑎𝑛 𝑃
𝐸𝐼
No P (dalam Newton)
lendutan praktikum
(E)
Lendutan teori (E)
Kesalahan relatif
1 10
2 20
3 30
4 40
5 50

Inersia Batang
𝐼 =1
12𝑏ℎ3 = ⋯
dengan δE = y, 𝑚
𝐸𝐼 = a, dan P = x
𝑦 = 𝑎𝑥
𝑎 =𝑦
𝑥
𝑎 =δa
𝑃
𝑎 =𝑠𝑒𝑘𝑖𝑎𝑛
𝐸𝐼
𝐸 𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 =𝑠𝑒𝑘𝑖𝑎𝑛
𝑎𝐼
Kesalahan Relatif E
𝐾𝑅 = |𝐸𝑝𝑟𝑎𝑘𝑡𝑖𝑘𝑢𝑚 − 𝐸𝑡𝑒𝑜𝑟𝑖
𝐸𝑡𝑒𝑜𝑟𝑖| 𝑥100%