Batimetri_Kolam Pelabuhan
42
-
Upload
arroyan-suwarno -
Category
Documents
-
view
71 -
download
29
description
Cara mengukur Batimetri Kolam
Transcript of Batimetri_Kolam Pelabuhan
Pengambilan data batimetri dilakukan pada hari selasa tanggal 14 Oktober 2008 di daerah pelabuhan Tanjung Mas yang tepatnya di perairan antara Bogasari dan Intake PLN
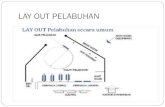
A. PeralatanSurvey bathimetri yang dilakukan di kolam pelabuhan OPSICO yang dilakukan pada tanggal 11 Februari 2011, menggunakan 2 (dua) jenis peralatan utama yaitu Echo Sounder dan Global Positioning System (GPS).1. Echo SounderEcho sounder adalah merupakan salah satu peralatan elektronik yang terdapat dikapal guna untuk mengukur kedalaman air laut.Prinsip kerja echo sounder adalah pengukuran kedalaman laut berdasarkan pulsa getaran suara. Getaran pulsa-pulsa tersebut dipancarkan dari transducer kapal secara vertikal ke dasar laut, selanjutnya permukaan dasar laut, selanjutnya permukaan dasar laut akan memantulkan kembali pulsa-pulsa itu kemudian diterima oleh transducer kapal (Yoyok Suariyoto, 2002) Selang waktu pulsa saat dipancarkan sampai kembali ke receiver dihitung, sedangkan kecepatan membuat suara di air dapat dikatakan tetap, sehingga setengah waktu tempuh dikalikan dengan kecepatan suara di air dapat dihitung sebagai kedalaman air (Akmal Ismail, 1975)Rumus kecepatan pulsa air di laut2d = V.T
d = dimana : d = jarak V = kecepatan rambat suaraT = waktu (dalam detik)
a. Sistem kerja echo sounder Recorder mengirimkan sinyal yang mengeluarkan suara ultrasonic dengan waktu selangan yang teratur dari dasar laut, kepada transmitter. Recorder mencatat kedalaman air secara otomatis dengan membangkitkan sinyak baru, setiap kali sinyal-sinyal yang dipantulkan dari receiver dikirimkan ke pencatat yang bergerak diatas kertas dengan kecepatan tertentu (Sonnenberg G. J. 1987).
RECORDERTRANSMITTERRECEIVERTRANSDUCER
Gambar 1. Skema Kerja Echo Sounder
Transmitter merupakan alat yang mengeluarkan sinar elektronik yang kuat untuk mengeluarkan gelombang dari transducer, waktunya mengeluarkan gelombang ultrasonic dikontrol oleh recorder. Transducer adalah alat yang mengeluarkan dan menerima gelombang suara. Gelombang suara tersebut mengubah sinyal-sinyal listrik dari transmitter ke pulsa-pulsa ultrasonic untuk dikirim kedalam air. Pulsa-pulsa ultrasonic ini merambat lewat air dan memantul didasar laut atau kawanan ikan mengembalikan ke transducer lagi sebagai gema. Gema ini dirubah lagi menjadi sinyal-sinyal elektro sebelum dikirim ke receiver. Receiver memperkuat penerimaan sinyal-sinyal dari transducer yang akan mengirim sinyal-sinyal gema ke pena-pencatat recorder (Sonnenberg G. J. 1987).
Gambar 2. Prinsip kerja echosounder
b. Perangkat utama echo sounderEcho sounder terdiri atas 4 komponen (gambar 1) antara lain : transmitter, transducer, receiver, dan recorder. Fungsi transmitter adalah memproduksi energi berupa listrik. Pada transducer listrik diubah menjadi pulsa suara yang dipancarkan ke air dan pada alat ini juga echo yang diterima berupa pulsa suara dirubah kembali menjadi pulsa listrik. Fungsi receiver adalah memperkuat pulsa listrik yang masih lemah yang datang dari transducer sampai dapat dicatat atau ditayangkan (Arso Martopo, 1992).Transmitter adalah bagian suatu alat yng memproduksi pulsa listrik untuk dikirimkan ke transducer, namun sebelum sampai di transducer pulsa listrik tadi diperkuat dulu dari hanya beberapa watt (W) menjadi ribuan Kilo watt (Kw) (Arso Martopo, 1992).Transducer, bagian suatu alat yang berfungsi merubah pulsa listrik menjadi pulsa suara yang kemudian memancarkanya kedalam air untuk mengenai sasaran maka akan dipantulkan lagi, yang akhirnya juga akan diterima kembali oleh receiver. Disini pulsa suara dirubah kembali menjadi pulsa listrik kemudian diperkuat oleh receiver amplifier (Arso Martopo, 1992).Receiver, bagian alat ini salak satu fungsinya adalah memperkuat energi pulsa listrik yang lemah dari transducer menjadi kira-kira satu juta kali yang kemudian siap diproses untuk diteruskan pada stylus (Arso Martopo, 1992).Recorder, alat yang berfungsi menggambarkan informasi pulsa listrik dalam bentuk goresan pada kertas pencatat dengan menggunakan stylus. Dilihat dari penggunaanya kertas pencatat pada echo sounder terbagi dua jenis yaitu kertas basah, dan kertas kering yang masing-masing mempunyai kekurangan dan kelebihan. Kekuranganya dalam penggunaan kertas basah adalah dalam hal penyimpananya, yaitu kertas harus selalu basah, karena apabila kertas yang akan dipakai menjadi mengering sebelum digunakan maka gambar hasil rekaman tidak jelas, sedangkan kelebihanya gambar hasil rekaman akan lebih jelas perbedaan-perbedaanya. Kertas kering kelebihanya gambar tidak akan menjadi kabur/berubah walupun disimpan untuk jangka waktu yang lama (Arso Martopo, 1992).Selain dengan kertas pencatat, sinyal listrik yang datang dari receiver dapat juga ditampilkan melalui suatu alat yang disebut Oscilloscope atau Cathode Ray Tube (CRT) yaitu berupa tayangan sinyal dalam layar monitor (Arso Martopo, 1992).
2. Global Positioning System (GPS) Global Positioning System (GPS) adalah suatu sistem navigasi yang memanfaatkan satelit. Penerima GPS memperoleh sinyal dari beberapa satelit yang mengorbit bumi. Satelit yang mengitari bumi pada orbit pendek ini terdiri dari 24 susunan satelit, dengan 21 satelit aktif dan 3 buah satelit sebagai cadangan. Dengan susunan orbit tertentu, maka satelit GPS bisa diterima diseluruh permukaan bumi dengan penampakan antara 4 sampai 8 buah satelit. GPS dapat memberikan informasi posisi dan waktu dengan ketelitian sangat tinggi (Dirjen Perikanan, 1999).
Gambar 3. Bagian-bagian GPSa. Bagian-bagian GPSPada umumnya menurut Dirjen Perikanan (1999), pesawat GPS terdiri dari dua bagian atau unit : Unit antenaBentuknya beragam, ada yang berbentuk tabung, bentuk setengah bulat, piringan tebal, bahkan ada berbentuk bola besar. Unit displayBiasanya bentuk display berupa layar monitor ( LED ) kecil berikut papan tombol ( keyboard ) nya menjadi satu.b. PengoperasianSaat tombol power ditekan on , unit display tidak langsung mengeluarkan tampilan posisi, namun harus menunggu kurang lebih dua menit untuk proses pencarian almanak ( data yang berisi informasi orbit )yang dipancarkan oleh satelit-satelit GPS. Karena setiap satelit selalu memancarkan data orbit dirinya sendiri serta perkiraan data orbit hampir semua satelit GPS yang ada. Kemudian barulah penerimaan awal almanac sekitar beberapa puluh detik. Proses tersebut secara kseluruhan memakan waktu 2 - 3 menit. Setelah itu unit Display akan menampilkan beberapa informasi pada layar LCD yang antara lain menurut Dirjen Perikanan (1999), yaitu mengenai :
Waktu ( time )Menerangkan waktu kini berdasarkan waktu internasional ( UTC ), untuk waktu lokal disesuaikan melalui cara yang biasanya diuraikan melalui fungsi tombol menu. Posisi koordinat garis lintang dan garis bujur ( latitude and longitude )Menerangkan posisi kini koordinat dimana alat GPS berada, contoh :340 44 321 N ( posisi kapal berada pada koordinat atau perpotongan antara Garis Lintang Utara 340 44, 321 dan 350 211 567 E Garis Bujur Timur 350 21 567 detik ). Haluan ( course )Menerangkan haluan kapal saat ini, contoh : C = 1230. Kecepatan ( speed )Menerangkan keccepatan kapal saat ini, tertulis dalam satuan knot ( KT ). Informasi tersebut diatas tampil pada layar Display sebagai tampilan standart atau sama dengan tampilan pada tombol pos .c. Cara kerja GPS untuk mengetahui posisinya :Untuk mengetahui posisi dari GPS, diperlukan minimal 3 satelit. Pengukuran posisi GPS didasarkan oleh sistem pengukuran matematika yang disebut dengan Triliterasi. Yaitu pengukuran suatu titik dengan bantuan 3 titik acu. Misalnya anda berada di suatu kota A (disini kota kita anggap sebagai titik), tetapi anda tidak mengetahui dimana anda berada. Untuk mengetahui keberadaan anda, anda bertanya kepada seseorang, dan orang tersebut menjawab bahwa anda 2 km dari kota B. Jawaban ini tidak memuaskan anda karena anda tidak tahu apakah anda di sebelah selatan, utara, barat, atau timur kota B. Kemudian anda bertanya kepada orang ke-2 dan mendapat jawaban bahwa anda berada 5 km dari kota C. Dengan jawaban ini anda sudah dapat membayangkan dimana posisi anda, hanya ada kemungkinan 2 titik berbeda yang berpotongan antara lingkaran dengan radius kota A dengan kota B dan lingkaran dengan radius kota A dengan kota C. Untuk lebih memperjelas lagi anda mumerlukan orang ke-3, misalnya anda berada di 1 km dari kota D. Dengan demikian anda mendapatkan perpotongan antara lingkaran dengan radius jarak kota A ke kota B, lingkaran antara kota A dan kota C, dan lingkaran antara kota A dan kota D. Dalam GPS kota A adalah alat penerima GPS, kota B, C, dan D adalah Satelit (Dirjen Perikanan, 1999).
B. Metode Survey BathimetriLangkah awal yang dilakukan adalah menentukan titik referensi pemetaan yang kemudian di ukur jaraknya dengan permukaan air laut. Titik referensi ini sebaiknya konstan atau tetap terhadap perubahan pasang surut air laut. Oleh karena itu kita mengambil PAL demaga bongkar sebagai titik referensi, kemudian dikonversikan dengan LWS.
Gambar 4. PAL Dermaga Bongkar sebagai Titik Referensi
Pemetaan bathimetri dilakukan menggunakan sistem tracking di perairan kolam pelabuhan dengan cara ditentukan jarak antar track yang dibuat sedapat mungkin tegak lurus terhadap PAL dermaga bongkar dan perekaman dilakukan dengan tenggang waktu 15 detik. Dalam penentuan titik fix dilakukan pemeruman dengan menggunakan perum gema. Adapun alat yang digunakan adalah Echosounder dimana kedudukan tranduser dipasang di permukaaan air.
Gambar 5. Kedudukan Tranduser pada alat Echosounder
Pasang Surut Perairan SemarangBerdasarkan data pasang surut perairan Semarang, Propinsi Jawa Tengah selama 15 hari, dimulai dari tanggal 1 Februari 15 Februari 2011. Grafik pasang surut ditampilkan dalam gambar dibawah ini, data pasang surut selanjutnya dianalisa dengan metode admiralty untuk mendapatkan karakteristik parameter pasang surut yang meliputi 9 (sembilan) konstanta harmonis pasang surut (M2, S2, N2, K2, K1, O1, P1, M4, MS4) dan tipe pasut, MSL, LLWL dan HHWL.
Grafik Pasang Surut Perairan Semarang Tanggal 1-15 Februari 2011
Berdasarkan analisa admiralty yang telah dilakukan, didapatkan nilai konstanta harmonik. Komponen penting pasang surut dari hasil analisa Admiralty didapatkan nilai muka laut rerata (MSL) adalah 92,20 cm, LLWL atau muka laut rendah terendah 31,11 cm dan nilai muka laut tinggi tertinggi HHWL adalah 153,28 cm. Nilai muka laut rerata (MSL) dari nilai muka laut rendah terendah adalah 61,08 cm. Dari nilai bilangan Formzahl (Nilai F =2,96) maka dapat disimpulkan bahwa jenis pasut disekitar perairan Semarang, Jawa Tengah adalah tipe campuran condong ke harian tunggal.
Tabel Konstanta Harmonik Pasang Surut Perairan SemarangKonstantaA (cm)g ( o)
S092.20
M29.3082.64
S26.10121.89
N20.2233.62
K136.97335.06
O18.7065.37
M40.5531.05
MS40.79111.11
K21.65121.89
P112.20335.06
Tabel Komponen Penting Pasang Surut Perairan SemarangKomponen penting pasang surutElevasi (Cm)
LLWL31.11
HHWL 153.28
MSL 92.20
Range Tide (HHWL-LLWL)122.17
MSL-LLWL61.08
F (bilangan Formzahl)2.96
TipePasang surut campuran condong ke tunggal
C. Data Hasil PengamatanDari hasil pengukuran titik referensi serta perekaman data posisi dan kedalaman didapat data sebagai berikut:
Tabel 1. Data kedalaman perairan kolam pelabuhan OPSICONoPosisi KoordinatKedalaman
SEKedalaman (m)Elevasi LWS (m)Kedalaman thd LWS (m)
16.939833110.420150-12.70.589-12.1
26.939843110.419990-10.30.589-9.7
36.939852110.421120-9.10.589-8.5
46.939856110.420312-14.50.589-13.9
56.939856110.420875-15.00.589-14.4
66.939856110.421450-9.30.589-8.7
76.939867110.419600-11.70.589-11.1
86.939873110.419834-9.40.589-8.8
96.939883110.420567-80.589-7.4
106.939892110.420160-12.40.589-11.8
116.939901110.421446-9.10.589-8.5
126.939910110.421125-8.90.589-8.3
136.939914110.420879-14.70.589-14.1
146.939917110.419983-10.40.589-9.8
156.939919110.419598-11.10.589-10.5
166.939919110.420317-14.30.589-13.7
176.939923110.419834-9.30.589-8.7
186.939950110.420567-7.70.589-7.1
196.939959110.420182-11.20.589-10.6
206.939967110.419600-9.40.589-8.8
216.939967110.421450-90.589-8.4
226.939983110.420317-14.10.589-13.5
236.939983110.420883-14.50.589-13.9
246.939983110.421117-8.80.589-8.2
256.939995110.419852-9.10.589-8.5
266.939999110.419995-11.80.589-11.2
276.940017110.420567-7.50.589-6.9
286.940030110.419616-8.70.589-8.1
296.940033110.420200-9.80.589-9.2
306.940035110.420888-13.70.589-13.1
316.940048110.421441-8.80.589-8.2
326.940053110.420321-12.40.589-11.8
336.940057110.421143-8.40.589-7.8
346.940069110.419849-90.589-8.4
356.940084110.420557-7.80.589-7.2
366.940088110.420010-13.30.589-12.7
376.940089110.419631-7.80.589-7.2
386.940093110.420870-13.00.589-12.4
396.940106110.420218-8.60.589-8.0
406.940126110.421172-7.60.589-7.0
416.940133110.420333-10.80.589-10.2
426.940133110.421450-8.60.589-8.0
436.940142110.420008-12.20.589-11.6
446.940150110.420550-8.20.589-7.6
456.940150110.420850-120.589-11.4
466.940150110.419629-7.80.589-7.2
476.940155110.419848-8.80.589-8.2
486.940178110.421178-7.70.589-7.1
496.940183110.420233-9.50.589-8.9
506.940200110.421441-9.10.589-8.5
516.940209110.420352-9.80.589-9.2
526.940213110.419999-10.30.589-9.7
536.940217110.419633-7.70.589-7.1
546.940218110.420571-8.70.589-8.1
556.940226110.421176-7.80.589-7.2
566.940226110.419853-8.70.589-8.1
576.940236110.420843-11.00.589-10.4
586.940262110.420231-9.50.589-8.9
596.940267110.419638-8.00.589-7.4
606.940283110.420583-9.20.589-8.6
616.940283110.421433-9.40.589-8.8
626.940283110.420006-9.20.589-8.6
636.940289110.421174-8.20.589-7.6
646.940294110.419852-12.20.589-11.6
656.940299110.420378-8.70.589-8.1
666.940317110.419650-8.40.589-7.8
676.940317110.420833-9.60.589-9.0
686.940329110.420607-8.90.589-8.3
696.940343110.421424-9.20.589-8.6
706.940345110.420244-9.40.589-8.8
716.940356110.419999-9.40.589-8.8
726.940356110.421164-8.60.589-8.0
736.940361110.420383-8.30.589-7.7
746.940367110.419850-15.10.589-14.5
756.940367110.420633-8.60.589-8.0
766.940378110.420839-9.30.589-8.7
776.940383110.419647-8.70.589-8.1
786.940392110.421406-9.10.589-8.5
796.940414110.421151-9.00.589-8.4
806.940423110.419852-14.70.589-14.1
816.940423110.420245-9.10.589-8.5
826.940423110.420642-8.70.589-8.1
836.940429110.420386-7.60.589-7.0
846.940429110.419999-9.50.589-8.9
856.940450110.419650-9.30.589-8.7
866.940450110.421383-90.589-8.4
876.940454110.420848-8.90.589-8.3
886.940475110.421149-9.30.589-8.7
896.940481110.420004-9.50.589-8.9
906.940481110.420651-8.80.589-8.2
916.940486110.419834-14.40.589-13.8
926.940500110.420250-8.90.589-8.3
936.940508110.419633-9.30.589-8.7
946.940508110.420361-7.80.589-7.2
956.940517110.420850-8.60.589-8.0
966.940521110.421366-8.70.589-8.1
976.940530110.421143-9.10.589-8.5
986.940533110.419817-14.10.589-13.5
996.940535110.419990-9.70.589-9.1
1006.940550110.420650-8.90.589-8.3
1016.940553110.420240-8.80.589-8.2
1026.940561110.421339-8.40.589-7.8
1036.940567110.419633-9.40.589-8.8
1046.940583110.420350-7.90.589-7.3
1056.940584110.419821-13.30.589-12.7
1066.940588110.421111-8.90.589-8.3
1076.940591110.419987-9.60.589-9.0
1086.940593110.420857-8.90.589-8.3
1096.940611110.420647-9.10.589-8.5
1106.940617110.421317-8.10.589-7.5
1116.940619110.419638-9.10.589-8.5
1126.940628110.420231-8.70.589-8.1
1136.940650110.421100-8.80.589-8.2
1146.940655110.420343-8.30.589-7.7
1156.940664110.419816-12.20.589-11.6
1166.940664110.421468-8.80.589-8.2
1176.940667110.420867-9.10.589-8.5
1186.940678110.419968-10.40.589-9.8
1196.940678110.420629-9.30.589-8.7
1206.940683110.419650-8.80.589-8.2
1216.940700110.421303-7.80.589-7.2
1226.940717110.420233-8.70.589-8.1
1236.940717110.420350-8.70.589-8.1
1246.940727110.421093-8.70.589-8.1
1256.940727110.421468-9.30.589-8.7
1266.940733110.420617-9.40.589-8.8
1276.940744110.419814-11.20.589-10.6
1286.940744110.419660-8.70.589-8.1
1296.940745110.420866-9.30.589-8.7
1306.940767110.419964-110.589-10.4
1316.940783110.421298-7.50.589-6.9
1326.940785110.421459-9.50.589-8.9
1336.940789110.420223-9.00.589-8.4
1346.940789110.420615-9.30.589-8.7
1356.940794110.420352-9.20.589-8.6
1366.940798110.419812-10.70.589-10.1
1376.940800110.421100-8.80.589-8.2
1386.940802110.420876-9.50.589-8.9
1396.940817110.419667-8.70.589-8.1
1406.940829110.419959-11.90.589-11.3
1416.940834110.421294-8.00.589-7.4
1426.940852110.421102-9.10.589-8.5
1436.940856110.420593-9.20.589-8.6
1446.940856110.420875-9.40.589-8.8
1456.940861110.419674-9.00.589-8.4
1466.940861110.419803-10.20.589-9.6
1476.940865110.421455-9.80.589-9.2
1486.940867110.420217-9.20.589-8.6
1496.940867110.420350-9.40.589-8.8
1506.940901110.419950-13.10.589-12.5
1516.940910110.421298-8.70.589-8.1
1526.940913110.419803-9.60.589-9.0
1536.940916110.420582-9.20.589-8.6
1546.940917110.419683-9.30.589-8.7
1556.940919110.420879-9.50.589-8.9
1566.940923110.420218-9.30.589-8.7
1576.940923110.421080-9.20.589-8.6
1586.940945110.421464-10.00.589-9.4
1596.940950110.420339-9.30.589-8.7
1606.940963110.419803-9.80.589-9.2
1616.940968110.420580-8.90.589-8.3
1626.940977110.420200-9.40.589-8.8
1636.940977110.420865-9.50.589-8.9
1646.940978110.419956-14.10.589-13.5
1656.940983110.421300-9.50.589-8.9
1666.940994110.419683-9.40.589-8.8
1676.941000110.421067-9.30.589-8.7
1686.941017110.420350-9.20.589-8.6
1696.941021110.419803-9.60.589-9.0
1706.941026110.419955-14.40.589-13.8
1716.941035110.420580-8.50.589-7.9
1726.941039110.421294-9.50.589-8.9
1736.941039110.421457-10.20.589-9.6
1746.941050110.420200-9.40.589-8.8
1756.941062110.420870-10.70.589-10.1
1766.941067110.419683-9.50.589-8.9
1776.941070110.421067-9.40.589-8.8
1786.941075110.420343-9.10.589-8.5
1796.941083110.421300-9.60.589-9.0
1806.941088110.419794-9.70.589-9.1
1816.941093110.420205-9.20.589-8.6
1826.941106110.419928-14.70.589-14.1
1836.941115110.420567-8.30.589-7.7
1846.941124110.421459-10.90.589-10.3
1856.941128110.419683-9.50.589-8.9
1866.941128110.420325-8.90.589-8.3
1876.941131110.420873-110.589-10.4
1886.941133110.421067-9.30.589-8.7
1896.941154110.419795-9.50.589-8.9
1906.941155110.421290-11.00.589-10.4
1916.941167110.419917-15.10.589-14.5
1926.941169110.420196-9.10.589-8.5
1936.941183110.419683-9.60.589-9.0
1946.941183110.420317-8.70.589-8.1
1956.941187110.421080-9.10.589-8.5
1966.941195110.420879-11.80.589-11.2
1976.941200110.420562-8.20.589-7.6
1986.941217110.421283-120.589-11.4
1996.941217110.421450-12.80.589-12.2
2006.941218110.419794-9.50.589-8.9
2016.941233110.420200-8.70.589-8.1
2026.941244110.419669-9.90.589-9.3
2036.941249110.420562-8.00.589-7.4
2046.941253110.419919-15.00.589-14.4
2056.941253110.420307-8.80.589-8.2
2066.941253110.421062-8.90.589-8.3
2076.941271110.420879-13.10.589-12.5
2086.941276110.421272-13.30.589-12.7
2096.941285110.419794-9.40.589-8.8
2106.941294110.421459-13.90.589-13.3
2116.941298110.420200-8.50.589-7.9
2126.941317110.419667-11.40.589-10.8
2136.941317110.421050-8.60.589-8.0
2146.941329110.420562-7.80.589-7.2
2156.941333110.419933-14.90.589-14.3
2166.941333110.420300-8.90.589-8.3
2176.941333110.421267-14.50.589-13.9
2186.941346110.419799-9.20.589-8.6
2196.941346110.420869-13.90.589-13.3
2206.941361110.420187-8.10.589-7.5
2216.941365110.421049-8.40.589-7.8
2226.941367110.421467-14.80.589-14.2
2236.941378110.419652-12.70.589-12.1
2246.941392110.420294-9.10.589-8.5
2256.941401110.419794-9.10.589-8.5
2266.941401110.420571-7.70.589-7.1
2276.941410110.420870-14.40.589-13.8
2286.941410110.421254-14.70.589-14.1
2296.941417110.419933-13.30.589-12.7
2306.941417110.420183-7.90.589-7.3
2316.941419110.421049-8.10.589-7.5
2326.941432110.419653-14.20.589-13.6
2336.941441110.420272-9.30.589-8.7
2346.941454110.421468-14.90.589-14.3
2356.941472110.419785-8.90.589-8.3
2366.941476110.420574-7.60.589-7.0
2376.941481110.419928-12.80.589-12.2
2386.941481110.420169-7.80.589-7.2
2396.941481110.420848-14.70.589-14.1
2406.941483110.421050-7.80.589-7.2
2416.941483110.421250-15.10.589-14.5
2426.941499110.419652-14.50.589-13.9
2436.941500110.420267-9.40.589-8.8
2446.941530110.420165-7.70.589-7.1
2456.941530110.420571-7.80.589-7.2
2466.941533110.419767-8.70.589-8.1
2476.941533110.421483-15.10.589-14.5
2486.941548110.420276-9.40.589-8.8
2496.941548110.421040-7.70.589-7.1
2506.941549110.42085-150.589-14.4
2516.941553110.421241-14.90.589-14.3
2526.941562110.419928-11.10.589-10.5
2536.941567110.419667-15.10.589-14.5
2546.941583110.420167-7.60.589-7.0
2556.941588110.419768-8.80.589-8.2
2566.941593110.420548-7.90.589-7.3
2576.941602110.420852-15.10.589-14.5
2586.941602110.421486-14.60.589-14.0
2596.941606110.421035-7.70.589-7.1
2606.941617110.421233-14.80.589-14.2
2616.941628110.420272-9.50.589-8.9
2626.941633110.419933-10.30.589-9.7
2636.941637110.419656-15.00.589-14.4
2646.941653110.420539-80.589-7.4
2656.941660110.419763-8.90.589-8.3
2666.941664110.420160-8.00.589-7.4
2676.941667110.421033-7.60.589-7.0
2686.941669110.420848-15.00.589-14.4
2696.941683110.420267-9.50.589-8.9
2706.941683110.421500-14.40.589-13.8
2716.941691110.421231-14.00.589-13.4
2726.941695110.419932-9.30.589-8.7
2736.941700110.419650-14.90.589-14.3
2746.941700110.420540-8.50.589-7.9
2756.941717110.419767-8.90.589-8.3
2766.941727110.421035-8.00.589-7.4
2776.941733110.420842-150.589-14.4
2786.941750110.420167-8.40.589-7.8
2796.941750110.421250-12.80.589-12.2
2806.941754110.421491-13.10.589-12.5
2816.941758110.419937-8.70.589-8.1
2826.941762110.419656-14.30.589-13.7
2836.941762110.420544-9.10.589-8.5
2846.941776110.420281-9.60.589-9.0
2856.941789110.420839-14.70.589-14.1
2866.941794110.419763-9.20.589-8.6
2876.941794110.421031-8.40.589-7.8
2886.941798110.420169-9.10.589-8.5
2896.941817110.419650-13.20.589-12.6
2906.941817110.419950-8.20.589-7.6
2916.941820110.421267-11.40.589-10.8
2926.941833110.420550-9.80.589-9.2
2936.941833110.421500-11.70.589-11.1
2946.941843110.420826-14.40.589-13.8
2956.941850110.420283-9.70.589-9.1
2966.941850110.421033-8.90.589-8.3
2976.941867110.419767-9.40.589-8.8
2986.941870110.419950-7.90.589-7.3
2996.941874110.419660-11.80.589-11.2
3006.941879110.420156-9.70.589-9.1
3016.941883110.421283-100.589-9.4
3026.941896110.420544-10.50.589-9.9
3036.941902110.420819-140.589-13.4
3046.941917110.419667-10.30.589-9.7
3056.941923110.419772-9.50.589-8.9
3066.941923110.421491-11.00.589-10.4
3076.941928110.419959-7.70.589-7.1
3086.941937110.421026-9.80.589-9.2
3096.941950110.420150-10.60.589-10.0
3106.941950110.420281-10.90.589-10.3
3116.941954110.420535-11.20.589-10.6
3126.941963110.420812-12.40.589-11.8
3136.941963110.421294-9.10.589-8.5
3146.941977110.419790-9.40.589-8.8
3156.941983110.419967-7.50.589-6.9
3166.942000110.421500-9.60.589-9.0
3176.942003110.419665-9.40.589-8.8
3186.942004110.420147-11.50.589-10.9
3196.942017110.420533-12.30.589-11.7
3206.942017110.421033-110.589-10.4
3216.942017110.421300-8.10.589-7.5
3226.942017110.420808-11.20.589-10.6
3236.942033110.419783-9.30.589-8.7
3246.942033110.420283-12.50.589-11.9
3256.942048110.419968-7.70.589-7.1
3266.942057110.420138-12.10.589-11.5
3276.942070110.420808-10.50.589-9.9
3286.942075110.421026-11.90.589-11.3
3296.942075110.421491-9.60.589-9.0
3306.942079110.420535-13.10.589-12.5
3316.942083110.419667-8.20.589-7.6
3326.942093110.419785-9.10.589-8.5
3336.942097110.419977-7.80.589-7.2
3346.942102110.421308-7.80.589-7.2
3356.942117110.420133-13.70.589-13.1
3366.942124110.420290-13.70.589-13.1
3376.942133110.419665-8.00.589-7.4
3386.942137110.421026-13.00.589-12.4
3396.942142110.419803-8.90.589-8.3
3406.942142110.420808-10.10.589-9.5
3416.942150110.419983-7.90.589-7.3
3426.942150110.421500-9.50.589-8.9
3436.942155110.420517-14.00.589-13.4
3446.942167110.421333-7.50.589-6.9
3456.942173110.420133-14.10.589-13.5
3466.942183110.419667-7.50.589-6.9
3476.942200110.419817-8.90.589-8.3
3486.942200110.420300-14.60.589-14.0
3496.942200110.421033-14.10.589-13.5
3506.942200110.420808-9.30.589-8.7
3516.942204110.419981-8.10.589-7.5
3526.942240110.420133-14.50.589-13.9
3536.942240110.421334-7.90.589-7.3
3546.942245110.419656-7.70.589-7.1
3556.942245110.420303-14.80.589-14.2
3566.942245110.421481-9.40.589-8.8
3576.942250110.420517-14.70.589-14.1
3586.942258110.420808-8.70.589-8.1
3596.942271110.419995-8.50.589-7.9
3606.942285110.419816-9.30.589-8.7
3616.942285110.421035-14.50.589-13.9
3626.942300110.419650-80.589-7.4
3636.942300110.420133-150.589-14.4
3646.942300110.421350-8.20.589-7.6
3656.942316110.420307-15.00.589-14.4
3666.942316110.420799-8.40.589-7.8
3676.942317110.420017-8.80.589-8.2
3686.942322110.421477-9.30.589-8.7
3696.942329110.420513-14.90.589-14.3
3706.942347110.420133-15.10.589-14.5
3716.942365110.419652-8.50.589-7.9
3726.942365110.421348-8.70.589-8.1
3736.942367110.419817-7.60.589-7.0
3746.942367110.421033-150.589-14.4
3756.942370110.420017-9.00.589-8.4
3766.942383110.421473-9.30.589-8.7
3776.942383110.420300-15.10.589-14.5
3786.942387110.420790-8.00.589-7.4
3796.942400110.420517-15.10.589-14.5
3806.942419110.419821-7.70.589-7.1
3816.942419110.420124-15.00.589-14.4
3826.942419110.421031-15.00.589-14.4
3836.942433110.421360-9.10.589-8.5
3846.942435110.419661-90.589-8.4
3856.942437110.420298-15.00.589-14.4
3866.942445110.420022-9.20.589-8.6
3876.942463110.420517-15.30.589-14.7
3886.942467110.420117-150.589-14.4
3896.942472110.421468-9.40.589-8.8
3906.942486110.419834-7.80.589-7.2
3916.942488110.420785-7.80.589-7.2
3926.942490110.421022-14.90.589-14.3
3936.942499110.421348-9.00.589-8.4
3946.942500110.420033-9.40.589-8.8
3956.942504110.420294-14.80.589-14.2
3966.942508110.419660-9.10.589-8.5
3976.942533110.419833-7.90.589-7.3
3986.942542110.421456-9.40.589-8.8
3996.942544110.420517-15.50.589-14.9
4006.942550110.421017-14.90.589-14.3
4016.942553110.420115-15.30.589-14.7
4026.942566110.420776-7.60.589-7.0
4036.942567110.420283-14.60.589-14.0
4046.942571110.420035-9.70.589-9.1
4056.942571110.421344-8.80.589-8.2
4066.942583110.419667-9.40.589-8.8
D. Peta Hasil Analisa DataAnalisis data hasil pemeruman disusun dalam format koordinat dan kedalaman untuk dikoreksi terhadap pasut dan selanjutnya diperoleh data koordinat kedalaman terkoreksi. Data koordinat kedalaman terkoreksi inilah yang akan menjadi dasar dalam pembuatan peta bathimetri yang digabung dengan peta garis pantai.Pembuatan peta bathimetri tersebut dilakukan dengan perangkat lunak Surfer 7,0 atau dengan program yang sesuai dan dibuat untuk survei ini.
Gambar 4. Peta lokasi survey
Gambar 5. Peta titik survey
Gambar 6. Peta persebaran kedalaman
Gambar 7. Peta kontur dan Potongan Melintang Dasar Perairan
Gambar 8. Peta Tiga Dimensi