BAB 4 sistem kontrol
19
4 Sistem Kontrol 4.1 Pendahuluan Istilah otomasi digunakan untuk mendeskripsikan operasi atau kontrol otomatis dari sebuah proses. Dalam manufaktur modern, penggunaan otomasi terus mengalami peningkatan, contohnya mesin-mesin yang beroperasi secara oto- matis, mungkin pada jalur produksi yang menggunakan robot, yang dapat digunakan untuk memproduksi komponen-komponen tanpa intervensi manusia yang kelihatan. Bahkan penggunaan otomasi pada peralatan-peralatan rumah tangga dan perkantoran juga terus mengalami peningkatan. Otomasi meliputi operasi-operasi yang dijalankan dalam urutan yang dipersyaratkan serta pengendalian keluaran pada nilai-nilai yang dipersyaratkan. Berikut ini sejarah perkembangan otomasi. Tiga yang pertama berkaitan dengan perkembangan organisasi manufaktur yang membuat berkembangnya produksi terotomasi. I Industri modern dimulai di Inggris pada abad ke- 18 yang ditandai dengan penggunaan mesin uap. Hal ini berarti bahwa pengorganisasian kerja di industri menjadi semakin efisien jika dibandingkan dengan di rumah tangga yang dilakukan di dalam bengkel-bengkel kerja kecil. Perkembangan permesinan menandai gelora dari masa ini. 2 Perkembangan mesin-mesin berpenggerak pada awal tahun 1900-an me- miliki makna perbaikan tingkat akurasi dalam proses produksi komponen, sehingga komponen tidak lagi dibuat secara terpisah agar cocok dengan suatu produk tertentu, melainkan difabrikasi dalam kumpulannya (batch) yang identik dengan tingkat akurasi tertentu yang memastikan komponen- komponen tersebut cocok dengan setiap kumpulan suatu produk. Perhatikan masalah-masalah baut dan sekrup jika setiap baut harus dibuat secara terpisah agar cocok dengan sekrupnya, dan keuntungan melalui fabrikasi baut dan sekrup dengan tingkat akurasi tertentu yang tinggi di mana setiap kumpulan baut cocok dengan sekrupnya. 3 Ide jalur produksi diikuti oleh Henry Ford pada tahun 1909 dalam pengembangannya untuk memproduksi mobil. Proses produksi dalam sebuah jalur produksi diuraikannya menjadi sederetan kumpulan tugas yang memungkinkan untuk diotomasi sehingga berkembanglah jalur produksi terotomasi. 4 Pada tahun 1920-an, perkembangan terjadi pada prinsip-prinsip teoretis sistem kontrol dan penggunaan metode umpan balik. Salah satu yang menjadi titik perhatian khusus adalah perkembangan sistem kontrol untuk kemudi otomatis kapal dan pesawat udara. 5 Pada tahun 1940-an, selama Perang Dunia Kedua, perkembangan terjadi pada aplikasi sistem kontrol di dunia militer, misalnya pelacakan radar dan kontrol senapan. 6 Perkembangan analisis dan desain penguat umpan balik, contohnya I I
-
Upload
zecky-vikri -
Category
Documents
-
view
73 -
download
19
description
sistem kontrol instrumentasi
Transcript of BAB 4 sistem kontrol
-
4 Sistem Kontrol
4.1 Pendahuluan Istilah otomasi digunakan untuk mendeskripsikan operasi atau kontrol otomatisdari sebuah proses. Dalam manufaktur modern, penggunaan otomasi terusmengalami peningkatan, contohnya mesin-mesin yang beroperasi secara oto-matis, mungkin pada jalur produksi yang menggunakan robot, yang dapatdigunakan untuk memproduksi komponen-komponen tanpa intervensi manusiayang kelihatan. Bahkan penggunaan otomasi pada peralatan-peralatan rumahtangga dan perkantoran juga terus mengalami peningkatan. Otomasi meliputioperasi-operasi yang dijalankan dalam urutan yang dipersyaratkan sertapengendalian keluaran pada nilai-nilai yang dipersyaratkan.
Berikut ini sejarah perkembangan otomasi. Tiga yang pertama berkaitandengan perkembangan organisasi manufaktur yang membuat berkembangnyaproduksi terotomasi.
I Industri modern dimulai di Inggris pada abad ke- 18 yang ditandaidengan penggunaan mesin uap. Hal ini berarti bahwa pengorganisasiankerja di industri menjadi semakin efisien jika dibandingkan dengan dirumah tangga yang dilakukan di dalam bengkel-bengkel kerja kecil.Perkembangan permesinan menandai gelora dari masa ini.
2 Perkembangan mesin-mesin berpenggerak pada awal tahun 1900-an me-miliki makna perbaikan tingkat akurasi dalam proses produksi komponen,sehingga komponen tidak lagi dibuat secara terpisah agar cocok dengansuatu produk tertentu, melainkan difabrikasi dalam kumpulannya (batch)yang identik dengan tingkat akurasi tertentu yang memastikan komponen-komponen tersebut cocok dengan setiap kumpulan suatu produk.Perhatikan masalah-masalah baut dan sekrup jika setiap baut harus dibuatsecara terpisah agar cocok dengan sekrupnya, dan keuntungan melaluifabrikasi baut dan sekrup dengan tingkat akurasi tertentu yang tinggi dimana setiap kumpulan baut cocok dengan sekrupnya.
3 Ide jalur produksi diikuti oleh Henry Ford pada tahun 1909 dalampengembangannya untuk memproduksi mobil. Proses produksi dalamsebuah jalur produksi diuraikannya menjadi sederetan kumpulan tugasyang memungkinkan untuk diotomasi sehingga berkembanglah jalurproduksi terotomasi.
4 Pada tahun 1920-an, perkembangan terjadi pada prinsip-prinsip teoretissistem kontrol dan penggunaan metode umpan balik. Salah satu yangmenjadi titik perhatian khusus adalah perkembangan sistem kontrol untukkemudi otomatis kapal dan pesawat udara.
5 Pada tahun 1940-an, selama Perang Dunia Kedua, perkembangan terjadipada aplikasi sistem kontrol di dunia militer, misalnya pelacakan radardan kontrol senapan.
6 Perkembangan analisis dan desain penguat umpan balik, contohnya
II
-
Sistem Kontrol
4.2 Sistem
makalah ilmiah yang ditulis oleh Bode pada tahun 1945 tentang AnalisisJaringan dan Desain Penguat Pembalik, yang berguna dalam perkembanganlebih lanjut teori sistem kontrol.
7 Kontrol numerik dikembangkan pada tahun 1952 di mana penempatanposisi peralatan dilakukan melalui sederetan instruksi yang diberikanoleh program yang ditulis pada pita kertas berlubang (punched papertape). Program ini mengarahkan pergerakan motor yang menggerakkansumbu-sumbu dari peralatan mesin. Pada sistem kontrol ini tidak terdapatumpan balik data posisional untuk mengindikasikan apakah peralatantelah berada pada posisi yang benar atau belum. Sistem yang demikianini disebut sebagai kontrol loop terbuka.
8 Ditemukannya transistor di Amerika Serikat pada tahun 1948 menjadipembuka jalan bagi perkembangan IC, dan pada tahun l9l0-an, mikro-prosesor dan komputer memungkinkan sistem kontrol dibangun denganbiaya yang murah dan dapat digunakan untuk mengontrol berbagai macamproses. Akibatnya, otomasi menyebar ke banyak proses sehari-hari sepertimesin cuci rumah tangga dan kamera dengan fokus otomatis.
Kontrol otomatis terhadap mesin dan proses sekarang ini adalah bagianvital dari industri modern. Keuntungan sistem kontrol ini mencakup konsistensiproduk yang lebih baik, berkurangnya biaya operasi karena penggunaanpabrik dan bahan baku yang lebih baik, pengurangan jumlah tenaga kerjayang digunakan, dan tingkat keselamatan yang lebih tinggi.
Bab ini menyajikan bahasan pendahuluan mengenai ide-ide dasar sistemkontrol dan elemen-elemen yang digunakan.
kontrol Sebagai ilustrasi mengenai apa yang dapat dilakukan oleh sistem kontrol,tinjaulah beberapa hal berikut:Mengontrol sebuah variabel untuk mendapatkan nilai yang diinginkan1 Anda mengatur temperatur yang diinginkan pada suatu ruang dengan
cara mengatur termostat dari sebuah sistem pemanas terpusat padanilai temperatur ruang yang diinginkan. Ini merupakan contoh darisebuah sistem kontrol dengan variabel yang dikontrol adalah temperaturruang.
2 Pada sebuah pabrik pengisian botol, botol-botol secara otomatis diisidengan cairan hingga level/ketinggian yang telah ditentukan. Variabelyang dikontrol adalah level cairan di dalam botol dan kontrol dilakukanuntuk memastikan tidak ada perbedaan antara level cairan yang diinginkandan level cairan pada kenyataannya.
3 Peralatan mesin computer numerical control (CNC) digunakan untukmengerjakan sebuah benda kerja menjadi bentuk yang diinginkan secaraotomatis. Sistem kontrol memastikan tidak ada perbedaan antara dimensi-dimensi yang diinginkan dengan dimensi-dimensi pada kenyataannya.
4 Biskuit-biskuit dalam kemasan yang bergerak di sepanjang ban berjalanmemiliki berat yang harus diperiksa dan yang memiliki berat di bawahberat minimum yang dlizinkan akan secara otomatis ditolak. Variabelyang dikendalikan adalah beratnya.
Mengontrol urutan kejadian5 Sebuah ban berjalan digunakan untuk memindahkan kaleng ke sebuah
-
86 Sistem Instrumentasi dan Sistem Kontrol
Masukandengannilai yangdiinginkan
(a)
Masukan
denganurutankejadianyangdiinginkan
(b)
Masukan
denganurutankejadianyangdiinginkan
(c)
temperaturyangdiinginkan
Gambar 4.2terpusat
urutankejadianyang di-inginkan
variabeldengannilai yangdiinginkan
keluaran
munculnyakejadianapabilakondisi-kondisi
yang diper-syaratkanterpenuhi
temperaturyangdiinginkan
Sistem pemanas
urutankejadianyang di-inginkan
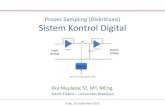
Gambar 4.1 Sistem kontrol (a)mengontrol sebuah variabel, (b)mengontrol urutan kejadian,(c) mengontrol apakah suatukejadian dapat teriadi.
mesin pres. Ketika kaleng mencapai mesin, ban berjalan tersebut akanberh'enti, kaleng diposisikan pada mesin pres, mesin pres bekerja untukmenghasilkan bentuk yang diinginkan, kemudian kaleng yang telah dipresdikeluarkan dari mesin dan seluruh proses ini berulang kembali. Dalamkasus ini, sederetan operasi dikontrol sedemikian rupa sehingga suatuoperasi hanya akan terjadi bila beberapa kondisi tertentu telah terpenuhi,contohnya aktivasi mesin pres hanya akan terjadi bila kaleng telah beradapada tempat seharusnya.
6 Anda mengatur sebuah tombol pada mesin cuci otomatis untukmengindikasikan bahwa baju berwarna putih sedang dicuci dan mesinselanjutnya bekerja dalam siklus kerja lengkapnya untuk mencuci jenispakaian ini. Kasus ini merupakan sebuah contoh mengenai sistem kontroldi mana muncul urutan kejadian yang terkontrol.
Mengontrol apakah suatu kejadian terjadi atau tidak1 Mesin cuci pakaian otomatis memiliki kunci pengaman pada pintunya,
sehingga mesin tidak akan beroperasi apabila catu dayanya mati danpintu mesin terbuka. Kontrolnya adalah kondisi yang membuat mesinberoperasi.
Sistem kontrol dapat dipandang sebagai sistem di mana suatu masukanatau beberapa masukan tertentu digunakan untuk mengontrol keluarannyapada nilai tertentu (Gambar 4.1(a)), memberikan urutan kejadian tertentu(Gambar 4.1(b)) atau memunculkan suatu kejadian jika beberapa kondisitertentu terpenuhi (Gambar 4.1(c)).
Contoh dari tipe sistem kontrol yang diperlihatkan oleh Gambar 4.1(a)adalah sebuah sistem kontrol pemanas terpusat yang memiliki masukanberupa temperatur ruangan yang dikehendaki dan keluaran berupa keadaanruang dengan temperatur tersebut (Gambar 4.2). Temperatur yang diinginkandisetel pada termostat dan sistem kontrol akan mengatur tungku pemanassedemikian rupa sehingga menghasilkan nilai temperatur yang diinginkantersebut. Sistem kontrol digunakan untuk mengontrol sebuah variabel padanilai yang telah ditetapkan.
Contoh dari tipe sistem kontrol yang diperlihatkan oleh Gambar 4.1(b)adalah sebuah mesin cuci yang memiliki masukan berupa sekumpulan instruksiurutan kejadian untuk mencuci pakaian, misalnya isi drum dengan air dingin,panaskan air hingga 40"C, kocok pakaian selama selang waktu tertentu,kosongkan drum air, dan lain sebagainya. Pabrikan mesin telah menyusunurut-urutan kejadian yang mungkin yang dapat dipilih dengan cara menekanatau memutar tombol untuk memilih urutan jenis pencucian yang sesuai. Jadimasukannya adalah informasi yang akan menentukan urutan kejadian yangdiinginkan dan keluarannya adalah urutan kejadian tersebut (Gambar 4.3).Sistem kontrol digunakan untuk mengontrol urutan kejadian.
4.2.1 Kontrol loop terbuka dan tertutupPerhatikan dua alternatif cara pemanasan ruangan untuk mencapai temperaturruang yang diinginkan. Pada contoh pertama, terdapat sebuah kawat listrikyang memiliki saklar pilihan untuk memilih elemen pemanas I kW atau2 kW. Keputusannya dapat berupa bahwa untuk mendapatkan temperaturruang yang diinginkan, maka yang diperlukan hanya menghidupkan saklar
Gambar 4.3 Sistem dari sebuahmesin cuci
-
Sistem Kontrol 87
Masukan
berupapemilihansaklar yangdinyalakan
Gambar 4.4 Kontrolterbuka
Keluaran
temperatur
elemen pemanas I kW. Ruangan akan dipanaskan dan mencapai temperaturyang ditentukan oleh kondisi elemen I kW yang menyala. Dengan demikian,temperatur ruangan dikendalikan oleh keputusan awal dan tidak akan adapenyesuaian atau pengaturan lebih jauh yang diperlukan. Ini merupakancontoh dan kontrol loop-terbuka. Gambar 4.4 mengilustrasikan kontrol loopterbuka tersebut. Jika terjadi perubahan kondisi, katakanlah seseorang tiba-tiba membuka jendela ruangan tersebut, maka tidak ada langkah penyesuaianyang dilakukan terhadap keluaran panas elemen untuk mengompensasiperubahan yang terjadi. Tidak ada informasi yang diumpankan kembali keelemen pemanas untuk melakukan penyesuaian agar dapat mempertahankantemperatur konstan.
Sekarang tinjaulah sistem pemanas listrik yang berbeda. Untuk mem-peroleh temperatur yang diinginkan, seseorang berdiri di dalam ruangansambil memegang sebuah termometer dan menyalakan atau mematikansaklar-saklar pilihan elemen pemanas I kW dan 2 kW berdasarkan selisihyang teramati antara temperatur ruangan yang sebenarnya dan temperaturyang diinginkan untuk menjaga agar temperatur ruangan selalu konstan padanilai yang diinginkan. Terjadi perbandingan terus-menerus antara temperaturyang sebenarnya dan temperatur yang dikehendaki. Dalam situasi ini terjadiproses umpan balik, informasi diumpankan kembali dari keluaran sistemuntuk memodifikasi masukannya. Jadi jika jendela ruang tersebut dibukadan terjadi aliran udara dingin ke dalam ruangan, maka sinyal umpan balikakan berubah karena temperatur ruang berubah dan diumpankan kembaliuntuk memodifikasi masukan sistem. Tipe sistem seperti ini dikenal sebagailoop-tertutup. Masukan untuk proses pemanasan bergantung pada besarnyadeviasi antara temperatur sebenarnyayang diumpankan kembali dari keluaransistem dan temperatur yang dikehendaki yang telah disetel sebelumnya. Selisihdi antara keduanya dapat ditentukan melalui sebuah elemen pembanding.Dalam contoh ini, seseorang yang memegang termometer merupakan elemenpembandingnya. Gambar 4.5 mengilustrasikan sistem tipe loop tertutup ini.
Elemenkoreksi
Gambar 4.5 Sistem loop-tertutup pemanas listrik
Perhatikanlah bahwa elemen pembanding dalam sistem loop tertutupdirepresentasikan oleh sebuah simbol lingkaran dengan tanda + pada nilaipengaturan dari masukan dan tanda
- pada sinyal umpan baliknya. Lingkaran
merepresentasikan unit penjumlahan, dan penjumlahan yang didapatadalah,
+ nilai pengaturan -
nilai umpan balik = error.Selisih antara nilai pengaturan dan nilai umpan balik ini, disebut sebagaierror, merupakan sinyal yang digunakan untuk mengontrol proses. Jika
ruang
loop
I
:
Pengukurantemperatur
temperaturruang yangdiinginkan
-
88 Sistem lnstrumentasi dan Sistem Kontrol
Air terlapat selisih antara sinyal-sinyal ini, maka keluaran sebenarnya tidak samadengan keluaran yang diinginkan. Ketika keluaran sebenarnya sama dengankeluaran yang diinginkan, maka effornya akan sama dengan nol. Karenasinyal umpan balik dikurangkan dari sinyal nilai pengaturan, maka sistemdikatakan memiliki umpan balik negatif.
Perhatikan contoh katup bola di dalam sebuah tangki yang digunakanuntuk mengontrol ketinggian permukaan air (Gambar 4.6). Nilai pengaturandari ketinggian air di dalam tangki ditentukan oleh pengaturan awal titikpivot tuas pelampung dan bola untuk memotong aliran air di dalam katup.Apabila level air berada di bawah level yang dikehendaki, maka bola akanbergerak ke level yang lebih rendah sehingga tuas pelampung akan membukakatup dan air mengalir ke dalam tangki. Ketika level air berada pada levelyang diinginkan, maka bola akan menggerakkan tuas pelampung ke posisiyang mengoperasikan katup untuk menghentikan aliran air ke dalam tangki.Gambar 4.7 memperlihatkan sistem tersebut yang direpresentasikan sebagaidiagram blok.
Suplai air
Masukan Keluaran
Katup
Tuas danpelampungbola
Gambar 4.6 Katup bola didalam tangki air
nilai peng-aturanposisituas pe-lampung
ketinggi-an airdalamtangki
Umpan balik posisisebenarnya tuas' pelampung
Gambar 4.7 Katup bola yang digunakan untuk mengontol ketinggian airdi dalam tangki
Pada sistem kontrol loop-terbuka, keluaran dari sistem tidak memilikiefek pada sinyal masukan terhadap proses yang sedang berlangsung.Keluaran sepenuhnya ditentukan oleh pengaturan awal. Dalam sistemkontrol loop-tertutup, keluaran memiliki efek pada sinyal masukan yangakan memodifikasinya untuk mempertahankan sinyal keluaran pada nilaiyang dikehendaki.
Sistem loop-terbuka memiliki keuntungan berupa sistem yang relatifsederhana sehingga murah dengan reliabilitas yang umumnya cukup baik.Akan tetapi sistem ini sering kali tidak akurat karena tidak ada koreksi yangdilakukan terhadap error-error yang terjadi pada sinyal keluaran yang berasaldari gangguan-gangguan tambahan. Sistem loop-tertutup memiliki keuntunganberupa sistem yang relatif akurat di mana nilai sebenarnya hampir selalu samadengan nilai yang diinginkan. Namun demikian, sistem ini lebih komplekssehingga lebih mahal dengan peluang kerusakan lebih besar karena lebihbanyak komponen yang terlibat di dalamnya.
4.3 Elemen-elemen dasar Gambar 4.8 menunjukkan berbagai elemen dasar dari sebuah sistem kontrolloop-terbuka. Sistem ini mempunyai tiga buah elemen dasar yaitu elemenkontrol, koreksi, dan proses di mana variabelnya hendak dikontrol.
-
Sistem Kontrol
Ir, ,"",diset diinginkan
Gambar 4.8 Elemen-elemen dasar dari sebuah sistem kontrol loop-terbuka
I Elemen kontrolElemen ini akan menentukan aksi atau tindakan yang harus diambilsebagai akibat dari diberikannya masukan berupa sinyal dengan nilaiyang diinginkan ke dalam sistem.
2 Elemen koreksiElemen ini mendapat masukan dari pengontrol dan menghasilkan keluaranberupa tindakan untuk mengubah variabel yang sedang dikontrol.
3 ProsesMerupakan proses di mana suatu variabel dikontrol.Tidak ada perubahan tindakan kontrol yang dilakukan untuk menanggapi
gangguan-gangguan yang mengubah variabel keluaran.
4,3.1 Elemen-elemen dasar dari sebuah sistem loop-tertutupGambar 4.9 menunjukkan bentuk umum dari sebuah sistem kontrol dasarloop-tertutup.
Pembandingan Elemen-elemen alur majuMasukan
+
Nilai yangdiinginkan
Sinyal umpan balik yang
ff#rff:";-::x:&"''dikontrol
Gambar 4.9 Elemen-elemen dasar dari sistem kontrol loop tertutup
Berikut ini diuraikan fungsi-fungsi dari masing-masing elemen tersebut diatas:
1 Elemen pembandingElemen ini berfungsi untuk membandingkan nilai yang dikehendaki darivariabel yang sedang dikontrol dengan nilai terukur yang diperoleh danmenghasilkan sebuah sinyal error:Error = sinyal dengan nilai yang diinginkan
- sinyal dengan nilai
sebenarnya yang terukur.Jadi, jika keluarannya merupakan nilai yang diinginkan, maka tidakakan muncul sinyal error, sehingga tidak ada sinyal yang diumpankanuntuk memulai kontrol. Sinyal error hanya akan muncul dan memulaiaksi kontrol jika terdapat perbedaan antara nilai yang diinginkan dengannilai variabel sebenarnya.
2 Elemen implementasi kontrolElemen kontrol menentukan aksi atau tindakan apa yang akan diambilbila diterima sebuah sinyal error. Kontrol yang dilakukan dapat berupa
-
90 Sistem Instrumentasi dan Sistem Kontrol
diberikannya sebuah sinyal yang akan menyalakan atau memadamkansebuah saklar jika terdapat sinyal error, seperti misalnya pada termostatruangan, atau mungkin juga diberikannya sebuah sinyal yang proporsionalterhadap ukuran dari error yang terjadi, yakni jika errornya kecil, makahanya sinyal kontrol yang kecil yang dihasilkan, dan jika errornya besar,maka dibangkitkan sinyal kontrol besar yang proporsional. Aksi-aksikontrol lainnya di antaranya meliputi mode integral di mana sinyalkontrol akan terus-menerus bertambah selama terus terjadi error, dan modederivatif di mana sinyal kontrol proporsional terhadap laju perubahanerror yang terjadi.
Istilah unit kontrol atau pengontrol (controller) sering kali digunakanuntuk menyatakan kombinasi atau gabungan antara elemen pembanding,yaitu detektor error dan elemen implementasi kontrol. Salah satu contohdari elemen semacam ini adalah penguat diferensial yang mempunyaidua buah masukan, yaitu satu masukan untuk nilai pengaturan dan satumasukan lainnya untuk sinyal umpan balik. Setiap perbedaan yang munculdi antara kedua sinyal masukan ini akan diperkuat untuk menghasilkansinyal error. Apabila tidak terdapat perbedaan di antara keduanya, makatidak akan ada sinyal error yang dihasilkan.
3 Elemen koreksiElemen koreksi atau sering pula disebut sebagai elemen kontrol akhinmenghasilkan suatu perubahan di dalam proses, yang bertujuan untukmengoreksi atau mengubah kondisi yang dikontrol. Istilah aktuatordigunakan untuk menyatakan elemen dari sebuah unit koreksi yangmembangkitkan daya untuk menjalankan aksi kontrol. Contoh dari elemenkoreksi ini antara lain katup kontrol direksional yang digunakan untukmengalihkan arah aliran fluida yang berarti mengontrol pergerakan darisebuah aktuator, seperti misalnya pergerakan piston di dalam silinder.Contoh lainnya adalah motor listrik di mana sebuah sinyal digunakanuntuk mengontrol kecepatan putaran porosnya.
4 ProsesProses adalah sistem di mana terdapat sebuah variabel yang dikontrol,contohnya antara lain sebuah ruangan di dalam rumah dengan variabelyang dikendalikan adalah temperatur ruangan tersebut.
5 Elemen pengukuranElemen pengukuran menghasilkan sebuah sinyal yang berhubungandengan kondisi variabel dari proses yang sedang dikontrol. Sebagaicontoh, elemen pengukuran ini dapat berupa sebuah sensor temperaturdengan unit pemrosesan sinyalnya yang bersesuaian.
Berikut ini beberapa istilah yang digunakan untuk mendeskripsikanberbagai jalur atau lintasan sinyal di dalam sistem:I Alur umpan balik
Umpan balik adalah cara di mana sebuah sinyal yang terkait dengan kondisisebenarny a y ang tercapai, diumpankan kembali untuk memodifikasi sinyalmasukan bagi suatu proses. Umpan balik dikatakan negatif apabila sinyalyang diumpankan kembali mengurangi nilai masukan. Umpan baliknegatif adalah jenis umpan balik yang diperlukan untuk mengontrolsebuah sistem. Umpan balik positiJ terjadi apabila yang diumpankankembali bersifat menambahkan nilai masukan.
asusHighlight
asusHighlight
asusHighlight
asusHighlight
asusHighlight
-
Sistem Kontrol 9l
4.4 Studi kasus
Pembandingan dan pemrosesanmemberikan sinyal kontrol yang
2 Alur majuIstilah alur maju digunakan untuk menyatakan jalur atau lintasan darisinyal effor sampai dengan keluaran. Pada Gambar 4.9, elemen-elemenalur maju ini terdiri dari elemen kontrol, elemen koreksi, dan elemenproses.
Istilah kontrol proses sering kali digunakan untuk menggambarkankontrol terhadap variabel-variabel, misalnya level cairan atau aliran fluida,yang terkait dengan sebuah proses demi mempertahankan nilai-nilai variabeltersebut pada suatu nilai tertentu. Perhatikan bahwa istilah regulator digunakanbagi sebuah sistem kontrol dengan fungsi untuk menjaga agar keluarannyakonstan meskipun muncul gangguan-gangguan eksternal. Karena itu, istilahregulator kadang diterapkan bagi suatu unit koreksi.
Berikut ini diberikan beberapa contoh kontrol loop-tertutup untuk meng-ilustrasikan bagaimana sistem, terlepas dari perbedaan bentuk kontrol yangsedang ditelaah, semuanya mempunyai elemen-elemen struktural dasar yangsama.
4.4.1 Kontrol kecepatan putaran poros motorTinjaulah sistem motor yang ditunjukkan oleh Gambar 4.I0, yang merupakankontrol terhadap kecepatan putaran poros motor, dengan representasi blokdiagramnya tampak pada Gambar 4.11.
terhadap error yang muncul
Potensiometeruntuk mem-bangkitkan sinyaltegangan untuknilai pengaturankecepatan
Gambar 4.10 Kontrol kecepatan putaran poros motor
sinyal untukproporsional Motor
sebagaielemenkoreksi
Sinyalkontrol kemotor
Gir bevel,untukmem-berikantap-off
Pengontrol: penguat:: " """ .'""'
::
i. Pembandingan
diferensial
Keluaran sistem:perputaran poros
Tachogenerator untukpengukuran kecepatanputaran poros: instrumenini memberikan tegangankeluaran yang proporsionalterhadap kecepatan poros
Keluaran
Putaranporos
Poros motor
Masukan
Nilai pengatur-an daripengaturanpotensiometer
Umpan balikTachogenerator
Gambar 4.ll Blok diagram kontrol kecepatan putcrran poros motor
Sinyal umpan balik
-
Sistem Instrumentasi dan Sistem Kontrol
Masukan berupa nilai kecepatan yang diinginkan dapat diperoleh melaluipengaturen posisi kontak potensiometer. Langkah ini akan menentukanberapa besar tegangan yang diberikan ke elemen pembanding, yaitu penguatdiferensial, sebagai penunjuk kecepatan putaran yang diinginkan. Penguatdiferensial menghasilkan sebuah sinyal keluaran yang diperkuat, yangproporsional terhadap selisih antara kedua sinyal masukannya. Apabilatidak terdapat selisih di antara keduanya, maka keluaran penguat adalahsama dengan nol. Dengan demikian penguat diferensial digunakan untukmembandingkan dan mengimplementasikan kontrol. Sinyal kontrol yangdihasilkan selanjutnya diumpankan ke motor yang akan mengatur kecepatanputaran porosnya agar sesuai dengan besarnya sinyal kontrol. Kecepatanputaran poros motor diukur dengan menggunakan tachogenerator. Instrumenini dihubungkan pada poros yang berputar melalui sepasang gir tirus (bevet).Sinyal dari tachogenerator merupakan sinyal umpan balik yang diberikan keelemen penguat diferensial.
4.4.2 Kontrol posisi peralatanGambar 4.12 menunjukkan sistem kontrol posisi yang menggunakan sebuahsabuk yang digerakkan oleh motor langkah (stepper) untuk tmengontrolposisi dari sebuah peralatan. Gambar 4.13 menampilkan representasi blokdiagramnya.
Masukan untuk pengontrol adalah tegangan posisi yang diinginkan dansuatu nilai tegangan yang merupakan ukuran dari posisi benda kerja, yangdihasilkan dari potensiometer yang digunakan sebagai sensor posisi. Karena
Potensiometeruntuk mem-bangkitkansinyalteganganuntuk nilaipengaturandari posisi
Pembandingan dan pemrosesan sinyaluntuk menghasilkan sinyal kontrol
\
Konverteranalog-ke-digital
Sinyal umpan balik
Elemen koreksi
Ban berjalan penggerak
Potensiometer untukpengukuran posisi
Motorlangkah
Gambar 4.12 Sistem kontrol posisi
i Pembandingan
nilai peng-aturan daripenyetelanpotensiometer
Umpan balik
Gambar 4.13 Blok diagram sistem kontrol posisi
Potensiometer
-
Sistem Kontrol 93
mikroprosesor digunakan. sebagai pengontrol, maka sinyal-sinyal ini harusdiproses terlebih dahulu rnenjadi sinyal digital. Keluaran pengontrol adalahsinyal listrik yang nilainya bergantung pada error antara posisi yang diinginkandan posisi sebenarnya, dan melalui sebuah unit penggerak, sinyal tersebutdigunakan untuk mengoperasikan sebuah motor langkah. Masukan motorlangkah akan mengakibatkan perputaran poros motor langkah demi langkahyang selanjutnya akan memutar sabuk dan menggerakkan peralatan.
4.4.3 Power steeringSistem-sistem kontrol tidak hanya digunakan untuk mempertahankan nilaivariabel konstan pada suatu nilai yang diinginkan, tetapi juga digunakanuntuk mengontrol sebuah variabel sedemikian rupa sehingga dapat selalumengikuti perubahan yang diinginkan yang diberikan melalui sebuah sinyalmasukan variabel. Contoh dari sistem tersebut adalah sistem power steeringpada mobil. Sistem ini akan beroperasi bila resistansi untuk memutar rodapenggerak (steering) melampaui suatu nilai tertentu yang telah ditetapkansebelumnya, dan memungkinkan pergerakan roda untuk mengikuti pergerakansudut dari roda penggerak. Masukan sistem adalah posisi sudut roda penggerak.Sinyal mekanis ini diturunkan skalanya melalui gir dan telah dikurangkandari sinyal umpan balik yang merepresentasikan posisi roda sebenarnya.Umpan balik ini diperoleh melalui sebuah penghubung mekanis. Jadi ketikaroda penggerak diputar dan terjadi perbedaan antara posisi roda penggerakdan posisi roda yang diinginkan, maka akan muncul sebuah sinyal error.Sinyal error ini selanjutnya digunakan untuk mengoperasikan sebuah katuphidrolik sehingga menghasilkan sebuah sinyal hidrolik untuk mengoperasikansilinder. Melalui sebuah penghubung, keluaran silinder selanjutnya digunakanuntuk mengubah posisi roda. Gambar 4.14 memperlihatkan blok diagram darisistem power steering tersebut.
Pengontrol Elemen koreksiKeluaran
Posisisudutroda
Masukan
Posisisudutdari rodapenggerak
Umpan balik negatif
Gambar 4.I4 Diagram blok dari sistem power steering
Pengukuran
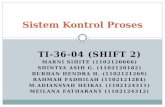
4.4.4 Kontrol tekanan bahan bakarMobil-mobil modern melibatkan banyak sistem kontrol di dalamnya. Sebagaicontoh, pada sebuah mobil modern akan dapat dijumpai sistem manajemenmesin yang dimaksudkan untuk mengontrol jumlah bahan bakar yangdiinjeksikan ke setiap silinder dan waktu penyulutan bunga api untuk penyalaanmesin. Bagian dari sistem semacam ini terkait dengan penyaluran bahanbakar bertekanan konstan ke dalam sistem pengapian kendaraan. Gambar4.15(a) memperlihatkan elemen-elemen yang digunakan untuk membentuksistem seperti ini. Bahan bakar dari tangki bahan bakar dipompakan melaluisebuah saringan bahan bakar menuju injektor, tekanan dalam saluran bahanbakar dikontrol pada nilai 2,5 bar (2,5 x 0,1 MPa) di atas tekanan manipololeh sebuah katup regulator. Gambar 4.15(b) menunjukkan prinsip kerja dari
-
Sistem Instrumentasi dan Sistem Kontrol
katup semacam ini. Sistem katup ini terdiri dari sebuah diafragma yang akanmenekan sebuah busi bola ke dalam lintasan aliran bahan bakar. Pada salahsatu sisi diafragma akan bekerja tekanan bahan bakar, sedangkan pada sisilainnya bekerja tekanan manipol dan pegas. Jika tekanannya terlalu tinggi,diafragma akan bergerak dan membuka lintasan balik ke tangki bahan bakaruntuk mengalirkan kelebihan bahan bakar, sehingga mengatur kembali tekananbahan bakar pada nilai yang diinginkan.
Sistem kontrol tekanan ini dapat direpresentasikan oleh sistem looptertutup seperti tampak pada Gambar 4.16. Nilai tekanan yang disetel akanditentukan oleh regangan pegas. Fungsi komparator dan kontrol diberikanoleh diafragma dan pegas. Elemen koreksinya adalah bola pada dudukannyadan pengukuran tekanan dilakukan oleh elemen diafragma.
Tekanan manipol
Regulatortekanan
bahan bakar
Kelebihan Ibahan bakar I
Saluranmasukbahanbakar
keluar{> bahan bakar
(b) regulator tekanan bahan
Sistembertekanan
Gambar 4.15 (a) Sistem suplai bahan bakanbakar
Diafragma dan Pegas Busi bolaNirai peng- !ii3n"".u,
Gambar 4.16 Sistem kontrol suplai bahan bakar
4.4.5 Rem antilockSalah satu contoh lain sistem kontrol pada mobil adalah sistem rem antilock,disingkat ABS (Antilock Brake System). Jika salah satu roda atau lebihdari sebuah kendaraan terkunci, tergelincir selama pengereman, maka jarakpengereman akan bertambah panjang, kontrol kemudi hilang, dan kerusakanban bertambah. Rem antilock dirancang untuk mengeliminasi penguncianroda seperti ini. Sistem ini pada dasarnya merupakan sebuah sistem kontrolyang mengatur besarnya tekanan yang dikenakan pada rem sedemikianrupa sehingga penguncian roda tidak akan terjadi. Sistem ini mensyaratkanpemonitoran kontinu terhadap roda dan penyesuaian tekanan untuk memastikanbahwa dalam kondisi normal penguncian tidak akan terjadi. Gambar 4.17memperlihatkan prinsip kerja dari sisrem ini.
Kedua katup yang digunakan untuk mengontrol tekanan adalah katupkontrol solenoide operasi direksional, biasanya kedua katup digabungkan
-
Sistem Kontrol 95
dari silinder Tekananmaster balik
Pengontrol+Masukan
Penguat
Gir pereduksi
Modulator,yaitu katup
Keluaran
Data yangdisimpandi dalammemoripengontrol
Sensor kecepatan
Gambar 4.17 Rem antilock: (a) diagram skematik, (b) diagram blok sistem kontrol
Rodayang tidaktergelincir
dalam sebuah komponen yang dikenal sebagai modulator. Ketika pengemudikendaraan menekan pedal rem, sebuah piston bergerak di dalam silinder masterdan membuat fluida hidrolik bertekanan. Tekanan ini menyebabkan kaliperrem beroperasi dan rem bekerja. Kecepatan roda dimonitor oleh sebuah sensorkecepatan. Ketika roda mengunci, kecepatan roda akan berubah secara tiba-tibasehingga sinyal umpan balik dari sensor juga berubah. Sinyal umpan balikini diberikan ke pengontrol dan selanjutnya dibandingkan dengan sinyal yangdiharapkan yang disimpan pada basis data memori pengontrol. Pengontrolkemudian dapat menyuplai sinyal-sinyal keluaran yang akan mengoperasikankatup sehingga terjadi penyesuaian tekanan yang diterapkan pada rem.
4.4.6 Kontrol ketebalanSebagai ilustrasi dari sistem kontrol proses, Gambar 4.18 memperlihatkansebuah jenis sistem yang dapat digunakan untuk mengontrol ketebalanlembaran material yang dihasilkan oleh roller (penggulung). Gambar 4.19menampilkan blok diagram dari sistem ini.
Ketebalan lembaran material dipantau oleh sebuah sensor, misalnyatransformator diferensial variabel linear (LVDT). Posisi probe LVDT disetelsedemikian rupa sehingga pada saat ketebalan lembaran material yangdiinginkan telah tercapai, maka tidak akan ada keluaran yang dihasilkan
Konverter A.C ke D.CMotor D.Cdengan arusjangkar yangdikontrol
LVDTRo// yangdikontrol
+E
-r-r-( _ ) nott t"trp Lembaran materialGambar 4.18 Sistem kontrol ketebalan lembaran material
-
96 Sistem Instrumentasi dan Sistem Kontrol
Penerapan hukum-hukum kontrol
Proses di manaElemen sebuah variabelkoreksi dikontrolMasukan + Keluaran
Ketebalan Ketebalanlembaranmaterial
yang disetel
LVDT merupakansensor dan komparator
Gambar 4.19 Blok diagram sistem kontrol ketebalan lembaran material
oleh LVDT. Komponen LVDT akan menghasilkan keluaran arus bolak-balik, dengan amplitudo berbanding lurus dengan error yang muncul. Sinyalkeluaran ini selanjutnya dikonversi menjadi sinyal error d.c. yang diumpankanke komponen penguat. Sinyal yang telah diperkuat selanjutnya digunakanuntuk mengendalikan kecepatan dari sebuah motor d.c., yang umumnyadigunakan untuk mengatur arus jangkar motor. Perputaran poros motor harusditurunkan melalui perangkat gir atau roda gigi, dan kemudian digunakanuntuk memutar ulir yang akan mengubah posisi roller bagian atas, sehinggamengubah ketebalan dari lembaran material yang diproduksi.
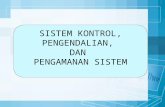
4.4.7 Kontrol ketinggian cairanGambar 4.20 memperlihatkan sebuah sistem kontrol yang digunakanuntuk mengontrol level (ketinggian) cairan di dalam sebuah tangki denganmenggunakan sebuah pengontrol pneumatik yang dioperasikan oleh sebuahpelampung. Seperti contoh sebelumnya, diagram blok dari sistem iniditunjukkan pada Gambar 4.21.
Bila level cairan di dalam tangki berada pada level yang diinginkandan aliran masuk sama dengan aliran keluar, maka kedua katup pengontrolakan menutup. Jika terjadi pengurangan aliran keluar dari dalam tangki,maka level cairan akan meningkat dan pelampung bergerak naik. Kondisiini mengakibatkan titik P bergerak naik. Apabila hal ini terjadi, maka katupyang terhubung dengan suplai udara akan membuka dan tekanan udara dalamsistem meningkat. lni mengakibatkan pergerakan diafragma katup kontrol aliran
Pembuangan ,oara f I suolai udara
Diafragma
Aliran masuk AlirarGambar 4.20 Sistem kontrol ketinggian cairan
Pengukurandengan LVDT
_>
-
Sistem Kontrol
Nilai pengaturandari level yangditentukan olehpenyetelanpelampung dankomponen-komponen peng-hubungnya
Gambar 4.21 Diagram blok sistem kontrol ketinggian cairan
Gambar 4.22 Salah satu contolxlengan penggenggam
Ketinggianzat cair
ke arah bawah, sehingga mengakibatkan pula pergerakan batang katup kearah bawah. Kejadian ini mengakibatkan aliran cairan yang masuk ke dalamtangki berkurang. Peningkatan tekanan udara di dalam ruang udara pengontrolmengakibatkan elemen pengembus (bellow) terkompresi dan menggerakkanpenghubung mekanisnya ke arah bawah. Kondisi ini pada akhirnya akanmenutup katup sehingga katup kontrol aliran dipertahankan pada suatu nilaitekanan yang baru dan diperoleh laju aliran yang baru pula.
Jika terjadi peningkatan aliran keluar dari dalam tangki cairan, makalevel cairan akan berkurang dan pelampung bergerak turun. Kondisi inimengakibatkan titik P bergerak turun ke bawah. Apabila situasi ini terjadi,maka katup yang terhubung dengan pembuangan udara akan membuka dantekanan udara di dalam sistem berkurang. Ini mengakibatkan pergerakankatup kontrol aliran diafragma ke arah atas, sehingga mengakibatkan pulapergerakan batang katup ke arah atas. Kejadian ini mengakibatkan alirancairan yang masuk ke dalam tangki bertambah. Alat pengembus bereaksiterhadap tekanan udara yang baru ini dengan menggerakkan penghubungmekanisnya, yang pada akhirnya akan menutup saluran buang (exhaust)sehingga mempertahankan tekanan udara pada suatu nilai tekanan yang baru,dan katup kontrol aliran pada pengaturan laju aliran yang baru.4.4.8 Lengan penggenggam robotIstilah robot digunakan untuk sebuah mesin yang merupakan manipulatormultifungsi yang dapat diprogram ulang, yang dirancang untuk menggerakkanperalatan, material, dan lain-lain melalui pergerakan terprogram variabeldengan maksud untuk menjalankan tugas-tugas tertentu yang spesifik. Disini hanya satu aspek saja yang akan ditinjau, yaitu penggenggam yangdipasangkan pada ujung lengan robot untuk meraih dan mencengkeram obyek.Bentuk penggenggam yang umum adalah yang mempunyai 'jari'atau 'rahang'.Dengan demikian, aksi penggenggaman akan melibatkan proses penjepitanobyek. Gambar 4.22 menunjukkan salah satu bentuk penggenggam di manaterdapat dua buah jari yang dapat menutup dan memegang sebuah obyekbersisi sejajar. Ketika sebuah batang besi bergerak masuk menuju jari-jaripenggenggam, maka jari-jari ini akan bergerak pada sumbu pivotnya dansaling mendekat. Sebaliknya, ketika batang besi bergerak keluar, maka jari-jaripenggenggam akan bergerak saling menjauhi. Pergerakan semacam ini perludikontrol sedemikian rupa sehingga daya genggam yang dikeluarkan olehjari-jari penggenggam terhadap obyek hanya cukup untuk menggenggamnyasaja. Jika daya genggamnya terlalu kecil, maka obyek akan jatuh, sedangkanjika daya genggamnya terlalu besar, maka kemungkinan besar obyek akanmengalami kerusakan bentuk atau bahkan hancur. Jadi perlu ada umpan
Katup-katuppneumatik
Pengukuran melaluisebuah pelampung yangakan menggerakkan tuas
Pegas
-
98 Sistem Instrumentasi dan Sistem Kontrol
gaya yangdiperlukanuntuk meng-ambil obyek
Gambar 4.23 Sistem kontrol lengan penggenggam
Masukan berupaprogram yangberisi instruksi-instruksi yangterkait denganposisi-posisi yangdiinginkan
Gambar 2.24 Sistem kontrol loop-tertutup untuk peralatan mesin
Obyek yangdiambil dengangaya kontakyang tepat
balik besarnya gaya yang bekerja saat terjadi kontak antara penggenggamdan obyek. Gambar 4.23 memperlihatkan sistem kontrol loop tertutup untukcontoh kasus ini.
Sistem penggerak yang digunakan untuk mengoperasikan penggenggamdapat berupa sistem penggerak listrik, pneumatik, ataupun hidrolik. Penggerakpneumatik merupakan jenis penggerak yang banyak digunakan untuk aplikasipenggenggam seperti pada contoh ini, mengingat instalasinya yang mudahdan murah, sistemnya mudah untuk dipelihara dan dirawat, serta suplai udaradapat dengan mudah dihubungkan ke penggenggam. Jika bebannya besar,maka jenis penggerak hidrolik akan lebih cocok untuk digunakan. Sensoryang dapat digunakan untuk pengukuran gaya kontak antara penggenggamdan obyek antara lain sensor piezoelektrik atau strain gauge. Jadi pada saatstrain gauge dilekatkan pada permukaan penggenggam dan gaya dikenakanpada penggenggam, strain gauge akan mengalami regangan dan menghasilkanperubahan nilai resistansi yang bekaitan dengan gaya yang dirasakanpenggenggam ketika terjadi kontak dengan obyek yang diambilnya.
Lengan robot dengan penggenggam umumnya mempunyai loop kontrollebih jauh untuk mengindikasikan apakah penggenggam telah berada padaposisi yang tepat untuk mengambil sebuah obyek. Jadi penggenggam mungkinmemiliki sebuah loop kontrol untuk mengindikasikan bahwa penggenggamtelah berada dalam kontak dengan obyek yang diambilnya, sehingga untukselanjutnya penggenggam ini dapat digerakkan dan sistem kontrol gayadapat beroperasi untuk mengontrol cengkeramannya. Sensor yang digunakanuntuk loop kontrol semacam ini dapat berupa saklar mikro yang digerakkanoleh sebuah tuas, roller, ataupun probe yang berada dalam kontak denganobyek.
4.4.9 Kontrol peralatan mesinSistem kontrol peralatan mesin digunakan untuk mengontrol posisi sebuahperalatan atau benda kerja serta operasi peralatan selama operasi mesinberlangsung. Gambar 4.24 menunjukkan blok diagram dari elemen-elemendasar sebuah sistem loop-tertutup untuk pemantauan kontinu terhadappergerakan dan posisi meja kerja tempat peralatan mesin terpasang, danbenda kerja hendak diproses.
Benda kerja yangdiolah secarabenar dengandimensi-dimensiyang diinginkan
Pengukuran posisimeja kerja
-
Sistem Kontrol
Besar dan arah pergerakan yang diinginkan untuk menghasilkan bendakerja dengan ukuran dan bentuk yang dikehendaki merupakan masukan bagisistem. Masukan ini berupa program instruksi-instruksi yang dimasukkan kedalam memori yang selanjutnya menyuplai informasi-informasi sebagaimanadiinginkan. Dengan demikian urutan langkah-langkahnya dapat diuraikansebagai berikut:1 Sinyal masukan diumpankan dari simpanan memori.2 Error yang muncul antara sinyal masukan dan pergerakan serta posisi
meja kerja sebenarnya merupakan sinyal error yang akan digunakan untukmengaplikasikan koreksi yang dibutuhkan. Koreksi ini misalnya motorlistrik untuk mengontrol pergerakan meja kerja. Meja kerja kemudianbergerak untuk mereduksi error yang terjadi sehingga posisi sebenarnyaakan sama dengan posisi yang diinginkan.
3 Sinyal masukan berikutnya akan diumpankan dari simpanan memori.4 Langkah ke-2 di atas diulang kembali.5 Sinyal masukan berikutnya akan diumpankan dari simpanan memori,
dan seterusnya.
4.4,10 Kontrol aliran fluidaGambar 4.25 memperlihatkan elemen-elemen dari sebuah sistem kontrolyang digunakan untuk mengontrol laju aliran zat cair pada nilai yang di-kehendaki, terlepas dari besarnya fluktuasi yang terjadi pada tekanan suplaiataupun tekanan balik. Gambar 4.26 menunjukkan blok diagram dari sistemtersebut.
Katup kontrol laju aliran fluida
Pengontrol
Gambar 4.25 Sistem kontrol untuk pengontrolan laju aliran fluida
Aliran sepanjang pipaKeluaran
Laju aliranyang di-inginkan
Gambar 4.26fluida
Tekanan diferensial Pelat orificePengukuran
Blok diagram sistem kontrol untuk pengontrolan laju aliran
Pengukuran tekanandiferensial
-
100 Sistem Instrumentasi dan Sistem Kontrol
4.5 Sistem kontrol waktudiskrit
Masukannn_nff Pengontrol
Gambar 4.27 Kontrol kejadian-diskrit dengan pengontrol yangakan membuka katup apabiladiterima sinyal kosong, danmenutup katup apabila sinyalpenuh
Keluaran untuk sfarf (mulai)
Gambar 4,28 Bor otomatis
Sistem kontrol waktu-diskrit adalah sistem kontrol di mana satu atau lebihmasukan berubah secara diskrit terhadap waktu, contohnya adalah masukanberupa sinyal on-off sehingga lebih merupakan bentuk digital, dan bukannyaanalog, sebagaimana yang telah dibahas sebelumnya dalam bab ini. Bentukkontrol ini sering pula disebut dengan istilah kontrol sekuensial (urutan) yangmenggambarkan sistem kontrol yang melibatkan fungsi-fungsi kontrol logika,yaitu ada atau tidak ada sinyal yang diberikan oleh sensor A, atau mungkinpula berupa sebuah sistem logika AND, yang membutuhkan masukan darisensor A dan masukan dari sensor B, untuk menentukan apakah diberikansebuah sinyal keluaran dan mengalihkan kondisi suatu peranti pada posision atau off.
Sistem kontrol waktu-diskrit adalah sistem-sistem kontrol di mana satu ataulebih masukannya berubah secara diskrit terhadap waktu dan melibatkanfungsi-fungsi kontrol logika.
Sebagai sebuah ilustrasi sederhana mengenai kontrol sekuensial ini, mariperhatikan sebuah alat yang disebut sebagai ketel otomatis. Ketika keteldinyalakan, maka air di dalam ketel akan dipanaskan dan proses pemanasanakan terus berlangsung hingga sebuah sensor mengindikasikan bahwa airtelah mendidih. Sensor hanya akan memberikan sebuah sinyal on-off. Ketelselanjutnya akan secara otomatis padam. Elemen pemanas ketel tidak dikontrolsecara kontinu tetapi hanya diberikan sinyal start (mulai) dan srop (berhenti)saja.
Contoh lainnya, proses pengisian sebuah kontainer dengan air akanmemiliki sebuah sensor pada bagian bawahnya, untuk mendeteksi kondisibahwa kontainer dalam keadaan kosong dan memberikan masukan kepengontrol untuk menyalakan aliran air, serta sebuah sensor pada bagianatasnya untuk mendeteksi kondisi bahwa kontainer telah penuh danmemberikan masukan ke pengontrol untuk mematikan aliran air ke dalamkontainer (Gambar 4.21). Di sini terdapat dua buah sensor yang memberikansinyal-sinyal on-off untuk memperoleh urutan kejadian yang diinginkan.
Sebagai ilustrasi dari jenis kontrol semacam ini yang digunakan dalamproses permesinan, tinjaulah sebuah sistem bor yang diinginkan agar secaraotomatis mengebor sebuah lubang pada benda kerja ketika benda kerjatersebut diletakkan di atas meja kerja (Gambar 4.28). Sebuah sensor saklardapat digunakan untuk mendeteksi apakah benda kerja telah berada di mejaatau belum, sensor seperti ini merupakan sebuah sensor on-off. Sensor iniselanjutnya akan memberikan sinyal masukan bagi pengontrol dan kemudianpengontrol akan memberikan sebuah sinyal keluaran untuk menggerakkansebuah motor untuk menurunkan kepala bor dan memulai proses pengeboran.Ketika bor telah mencapai pergerakan penuhnya pada benda kerja, makakepala bor akan memicu sensor saklar yang lain. Akibatnya sensor ini akanmemberikan masukan ke pengontrol untuk membalik arah putaran motorkepala bor.
Silakan lihat Bab 7 untuk pembahasan lebih jauh dan detail mengenaisistem kontrol sekuensial ini serta bagaimana sistem-sistem ini dapatdirealisasikan.
-
Sistem Kontrol 101
Soal-soal latihan Pertanyaan I sampai 4 memiliki empat buah pilihan jawaban: A, B, Cdan D. Pilihlah salah satu jawaban yang benar dari pilihan jawaban yangdisediakan.
I Tentukanlah apakah masing-masing pernyataan berikut ini Benar (B)atau Salah (S).Sebuah sistem kontrol loop-terbuka:(i) memiliki umpan balik negatif.(ii) merespons perubahan kondisi yang terjadi.A (i) B (ii) BB (i) B (ii) sc (i) s (ii) BD (i) s (ii) s
2 Tentukanlah apakah masing-masing pernyataan berikut ini Benar (B)atau Salah (S).Sebuah sistem kontrol loop-tertutup:(i) memiliki umpan balik negatif.(ii) merespons perubahan kondisi yang terjadi.A (i) B (ii) BB (i) B (ii) sc (i) s (ii) BD (i) s (ii) s
3 Tentukanlah apakah masing-masing pernyataan berikut ini Benar (B)atau Salah (S).Sebuah sistem kontrol loop-tertutup:(i) memiliki sebuah sistem pengukuran yang memberikan sinyal umpanbalik yang merupakan ukuran dari variabel yang sedang dikontrol.(ii) memiliki sebuah pengontrol yang mempunyai masukan berdasarkanselisih antara nilai pengaturan dan nilai umpan balik untuk variabel yangsedang dikontrol.A (i) B (ii) BB (i) B (ii) sc (i) s (ii) BD (i) s (ii) s
4 Tentukanlah apakah masing-masing pernyataan berikut ini Benar (B)atau Salah (S).Umpan balik negatif untuk suatu sistem terjadi ketika:(i) sinyal umpan balik dijumlahkan terhadap sinyal masukan.(ii) sinyal umpan balik merupakan ukuran dari nilai keluaran sistemkontrolA (i) B (ii) BB (i) B (ii) sc (i) s (ii) BD (i) s (ii) s
5 Sebutkan bentuk-bentuk sistem kontrol yang mungkin untuk berbagaisituasi berikut ini:(a) Pengontrolan ketebalan lembaran baja yang dihasilkan oleh sebuahrolling mill.
-
r02 Sistem Instrumentasi dan Sistem Kontrol
Penguatdiferensial Pemanas
Daya listrik
L, H(b) Sebuah ban berjalan yang digunakan untuk mengirimkan paket-paketdari sebuah mesin pengisi ke area pengambilan. Sistem kontrolnya harusdapat menggerakkan ban pada saat paket-paket diletakkan di atas ban,menjalankan ban hingga paket sampai di area pengambilan, kemudianmenghentikan ban hingga paket-paket tersebut dipindahkan. Setelah ituseluruh urutan kejadiannya dimulai kembali.(c) Pemantauan kondisi pernafasan pada sebuah unit perawatan intensif(ICU/UGD) sebuah rumah sakit, dan membunyikan alarm jika pernafasanberhenti.(d) Pengontrolan banyaknya bahan kimia yang disuplai ke dalam sebuahkantong.(e) Pengontrolan volume air yang disuplai ke dalam sebuah tangki untukmempertahankan level air yang konstan.(f) Pengontrolan penerangan jalan di depan kendaraan dengan menyalakanlampu-lampu.(g) Pengontrolan temperatur ruang sebuah kendaraan oleh pengemudi yangdilakukan secara manual dengan cara memilih kontrol-kontrol pemanasyang diperlukan untuk mendapatkan temperatur yang diinginkan.
6 Gambar 4.29 menunjukkan dua buah sistem yang dapat digunakan untukmengontrol temperatur dari sebuah ruangan. Jelaskan bagaimana masing-masing sistem tersebut bekerja.
7 Gambarkan sebuah diagram blok untuk sistem pemanas terpusat rumahtangga yang memiliki elemen-elemen berikut ini:(a) Sebuah termostat yang memiliki tombol yang disetel pada nilaitemperatur yang diinginkan serta memiliki masukan berupa temperatursebenarnya di dalam rumah, dan beroperasi sebagai sebuah saklar yangmemberikan sinyal listrik keluaran dalam kondisi on atau off.(b) Sebuah katup solenoide yang mempunyai masukan berupa sinyallistrik dari termostat dan mengontrol aliran minyak ke tungku pemanaspusat.(c) Sebuah tungku pemanas di mana masukannya adalah aliran minyakdan keluarannya adalah panas yang dialirkan ke ruangan melalui air yangmengalir pada radiator-radiator rumah.(d) Ruangan-ruangan di rumah di mana masukannya adalah panas dariradiator dan keluarannya adalah temperatur ruangan.Gambar 4.30 memperlihatkan sebuah sistem kontrol ketinggian air.Identifikasikanlah elemen-elemen fungsional dasar dari sistem ini.Gambarkan sebuah diagram blok untuk sistem umpan balik negatif yangdapat digunakan untuk mengontrol level cahaya di dalam sebuah ruangpada suatu nilai yang konstan.Gambarkan diagram blok yang dapat digunakan untuk menggambarkanoperasi dari sebuah pemanggang roti listrik dalam bentuk (a) sistemloop-terbuka, (b) sistem loop-tertutup.
Teganganacuan
Titik peng-aturan
Konverter resistansi-ketegangan
Daya listrik
(a)
Lo.aE
P
Mikrokontroler
Konverter Konverteranalog-ke- resistansi-ke-(b) digital tegangan
Gambar 4.29 Sistem kontroltemperatur ruangan (Soal no.6)
Katup solenoide untukmenyalakan atau
memadamkan tekanan udara
Katupterkendalitekanan
udara
Gambar 4.30 Sisrem kontrolketinggian air (Soal no.8)
10
level air