







Bahasa
Halaman
Hukum


Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Theoretical aspects of High-SpeedSupercavitation Vehicle Control
Bálint Vanek1 József Bokor1,2 Gary J. Balas1
1Department of Aerospace Engineering and MechanicsUniversity of Minnesota
2on sabbatical leave from Hungarian Academy of SciencesThis work was supported by ONR, Dr. Kam Ng program officer
American Control Conference, Minneapolis 2006

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Outline
1 MotivationProblem DescriptionVehicle Configuration
2 Control DesignControl ApproachControllability AnalysisSimulation
3 SummaryReferences
(Image:PSU/ARL)

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Supercavitation
• Pressure of fluid dropsdue to high speed,leading to vaporization
• Reduced skin frictiondrag
• Planing force can beused to sustain the tail
• Transition tosupercavitation needs effort
• Control surfaces immersionchanges
• Large, nonlinear planingforces

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Longitudinal Vehicle States
Cavity envelopeCavity centerline
Torpedo’s symmetry line
imm.
imm.
fin
cav
p
fin
g
cav
• The switching hyperplane depends on the delayedstate variable x(t − τ),
• First mode the system dynamics is linear, second modeis nonlinear input affine
• Switching condition does not depend on the controlinputs

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
System Equations
x(t) = Ax(t) + Bu(t) + Fg + Fp(t , x , δ) (1)
Bimodal, Switched System:
Fp(x , δ) = P(1− R′
h′(x , δ) + R′ )2(
1 + h′(x , δ)
1 + 2h′(x , δ))α(x , δ), (2)
h′(x , δ) =
{R−1c(δ)x(t) if c(δ)x(t) ≤ 0,
0 if c(δ)x(t) ≥ 0,(3)
α(x , δ) =
{cα(δ)x(t)− V−1Rc if c(δ)x(t) ≤ 0,
0 if c(δ)x(t) ≥ 0,(4)

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Control Approach
• Feedback laws for each mode transforms system to LTI• Control design synthesized in a new multivariable
canonic coordinate frame• Extending controllability results on bimodal switched
LTI systems to time delayed, switched, with the analysisof time delayed zero dynamics
• Tracking problem using multivariable pole placement

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Control Architecture
Vehicle
fincavitator
Feedback Linearizing Controller
cB.Actv
gravF 0x
∫ sC
cA
planeF
δ
(Bimodal)
sy
cx
)( τ−txc
(switching)

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Feedback LinearizationInput variables enter linearly in both modes. Coordinatetransformation for canonical coordinates:
Tc =
1 0 0 00 −V 1 00 1 0 00 0 0 1
(5)
Linear dynamics in new coordinates:
Ac =
0 1 0 0
−α110 −α111 −α120 −α1210 0 0 1
−α210 −α211 −α220 −α221,
Bc =
0
c1AB0
c2AB
(6)
Two outputs: y1 = x1 and y2 = x3, vector relative degree inboth modes are identically (2,2).

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
State Feedback
Applying a switched nonlinear feedback:
uflc =
{(CAB)−1(y13(t)− Fαx(t)− Fg + vI(t)(CAB)−1(y13(t)− Fαx(t)− Fg − Fp(x , δ) + vII(t)
(7)the switching condition is given by the sign of ys = c(δ)xc
• Nilpotent system with identical linear dynamics in bothmodes
• The system is continuous on the switching hypersurface• The relative degrees are equal in both modes
Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
System Decomposition
Selecting a direction p ∈ Im{B} such that the system is leftand right invertible:
x = Ax + pup + Bu, ys = Cx . (8)
the largest (A, p) - invariant subspace in ker{C} and thesmallest (C, A) invariant subspace over Im{p} induce thefollowing decomposition:
ξ = A11ξ + γv (9)
up =1γ
(−A12η − B21u + v) (10)
η = Pη + Qu + Rys, (11)
Last equation denoting the zero dynamics on the switchinghyperplane assuming Q is monic.

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Controllability ConditionsIf the pair (P, Q) is controllable, then η is controllablewithout using ys,If the pair (P, Q) is not controllable, then usingunconstrained u and nonnegative ys
1 The pair (P, [Q R]) has to be controllable.2 Consider the decomposition induced by the reachability
subspace R(P, Q),
η1 = P11η1 + P12η2 + Qu + R1ys (12)η2 = P22η2 + R2ys, (13)
where R2 6= 0. Then the imaginary part of the eigenvaluesof P22 cannot be zero.

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Application for the HSSV
HSSV has time delay dependency Discretize the systemusing backward difference scheme
Cd = [1, 0, L, 0,−1] (14)
The relative degrees are identically r = 2 for both modes.Zero dynamics obtained:
Tcd =
cs
csA1 0 0 0 00 0 1 0 00 β41T 0 −β21T 0
(15)

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Switched Zero DynamicsDecomposing the system to: [ξT (t), ηT (t)]T = Tcdx(t)
ξ(t + 1) =
[0 a120 a22
]ξ(t) +
[0 0 00 e22 e23
]η(t)+
+
[0
b21
]v1(t) +
[0
f22
]v2(t) (16)
ys =[1 0
]ξ(t) switching condition (17)
η(t + 1) = Pη(t) + Rξ(t) + Qv2(t), (18)
where
P =
p11 p12 p130 p22 p230 0 p33
, R =
0 r120 r220 0
, Q =
00
q31
. (19)
The zero dynamics are described by the last equation.The HSSV is controllable.

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Tracking: Multivariable PolePlacement
Feedback linearized system
∫cT pplF
FLA
FLBrefx
FLxv 1−cT
xdtd
11−M
[u1(t)u2(t)
]= (CAB)−1(
[x1(t)x2(t)
]ref− [αu]
[x1(t)x2(t)
]−
− [αl ]
[x3(t)x4(t)
]− [Gc]− [Pc(t , τ)]−
[v1(t)v2(t)
]) (20)

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Reference Tracking Controller
[v1(t)v2(t)
]= [αu]
[x1(t)− x1,ref (t)x2(t)− x2,ref (t)
]+ [αl ]
[x3(t)− x3,ref (t)x4(t)− x4,ref (t)
](21)
• The system behaves the same regardless of theinterior switching state
• One linear outer loop controller can guarantee stabilityand appropriate tracking
• Position and angle command dynamics are decoupled

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Vehicle Parameters
Parameter Description Value and Units
g Gravitational acceleration 9.81 ms2
m Density ratio, ρmρ 2
Rn Cavitator radius 0.01905mR Vehicle radius 0.0508mRc Cavity radius at tail 0.0647mL Length 1.8mV Velocity 75m
sσ Cavitation number 0.035
C1 Cav. lift coefficient 2685 N/radC2 Fin lift coefficient 1343 N/rad
Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Simulation Setup
• Obstacle avoidance maneuver, 75m/s, 17.5mtranslation within 4 s
• Pressure, temperature, viscosity etc. are constant• 10% disturbance on cavity wall• Model mismatch due to actuators (Gact = 1
200s+1 )• Trajectory reference commands and reduce limit cycle
oscillations.

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
17.5 m Maneuver
0 1 2 3 4 5 6 7−10
0
10
20z
(m)
Basic
0 1 2 3 4 5 6 70
0.1
0.2
0.3
0.4
time (s)
h (
m)
0 1 2 3 4 5 6 7−0.4
−0.2
0
0.2
0.4
pit
ch r
ate
(rad
/sec
)
Basic
0 1 2 3 4 5 6 7−4000
−2000
0
2000
4000
time (s)
Fin
Fo
rce
(N)
• High planing depth induces high actuator deflections• Good reference tracking• High pitch rate oscillations and accelerations due to the
cavity disturbance

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Role of Disturbance Model
0 1 2 3 4 5 6 7−1
−0.5
0
0.5
1
pit
ch r
ate
(rad
/sec
)
High Noise
0 1 2 3 4 5 6 7−5000
0
5000
time (s)
Fin
Fo
rce
(N)
0 1 2 3 4 5 6 7−0.5
0
0.5
pit
ch r
ate
(rad
/sec
)
Slow Noise
0 1 2 3 4 5 6 7−4000
−2000
0
2000
4000
time (s)
Fin
Fo
rce
(N)
• Higher noise ⇒ higher pitch rate and accelerations ontail but same immersion depth
• Control scheme is sensitive to bandwidth ofdisturbance model
Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
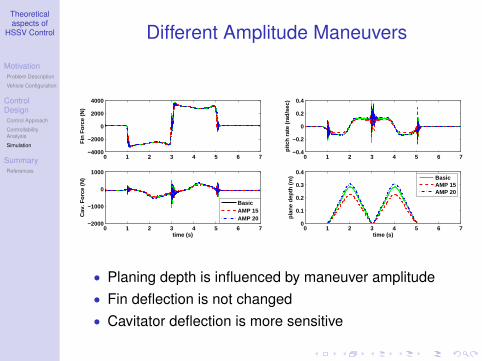
Different Amplitude Maneuvers
0 1 2 3 4 5 6 7−4000
−2000
0
2000
4000
Fin
Fo
rce
(N)
0 1 2 3 4 5 6 7−2000
−1000
0
1000
Cav
. Fo
rce
(N)
time (s)
BasicAMP 15AMP 20
0 1 2 3 4 5 6 7−0.4
−0.2
0
0.2
0.4
pit
ch r
ate
(rad
/sec
)
0 1 2 3 4 5 6 70
0.1
0.2
0.3
0.4
time (s)
pla
ne
dep
th (
m) Basic
AMP 15AMP 20
• Planing depth is influenced by maneuver amplitude• Fin deflection is not changed• Cavitator deflection is more sensitive
Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
Summary• Supercavitation is a promising way to increase the
speed of underwater vehicles• Control design challenges including delayed state
dependency, nonlinearities and switching with noisyswitching surface were analyzed
• The controllability problems related with the systemwere analyzed
• An inversion based control methodology was developed• A successful implementation of a two-loop control
strategy was demonstrated• Further development requires increased collaboration
between fluid and control researchers
Future goals: three dimensional trajectory tracking(asymmetric fin immersion and non-vertical planing forces),robust constraint fulfillment, control the vehicle using onesurface.

Theoreticalaspects of
HSSV Control
MotivationProblem Description
Vehicle Configuration
ControlDesignControl Approach
ControllabilityAnalysis
Simulation
SummaryReferences
References
G.J. Balas, J. Bokor, B. Vanek and R.E.A. ArndtControl of Uncertain Systems: Modelling,Approximation and Design.Control of High-Speed Underwater VehiclesSpringer-Verlag, 2006.
DARPA Advanced Technology OfficeUnderwater ExpressBAA06-13 Proposer Information Pamphlet (PIP), 2005.
G.J. Balas, Z. Szabó and J. BokorControllability of bimodal LTI systemsaccepted to: IEEE Transactions on Automatic Control,2006.
Top Related
Copyright © 2022 FDOKUMEN

