







Bahasa
Halaman
Hukum


Copyright
by
David Edward Gaylor
2003
The Dissertation Committee for David Edward Gaylorcertifies that this is the approved version of the following dissertation:
Integrated GPS/INS Navigation System Design for
Autonomous Spacecraft Rendezvous
Committee:
E. Glenn Lightsey, Supervisor
Robert H. Bishop
Wallace T. Fowler
Bob E. Schutz
Kevin W. Key
Integrated GPS/INS Navigation System Design for
Autonomous Spacecraft Rendezvous
by
David Edward Gaylor, B.S., M.S.
DISSERTATION
Presented to the Faculty of the Graduate School of
The University of Texas at Austin
in Partial Fulfillment
of the Requirements
for the Degree of
DOCTOR OF PHILOSOPHY
THE UNIVERSITY OF TEXAS AT AUSTIN
December 2003
Acknowledgments
I would like to thank my advisor, Dr. Glenn Lightsey, for his enthusias-
tic support and guidance throughout this research. I would also like to thank
my committee members: Dr. Robert Bishop, Dr. Wallace Fowler, and Dr.
Bob Schutz of the Aerospace Engineering Department, and Dr. Kevin Key of
Titan Corporation at the NASA Johnson Space Center, for their assistance in
the preparation of this manuscript.
This research was partially funded by the NSTL Relative Navigation
Support Grant (NAG9-1189) from the Navigation Systems and Technology
Laboratory at the NASA Johnson Space Center. I would like to thank Janet
Bell and Susan Gomez for supporting this research and Daniel Adamo, John
Goodman, and Tim Crain for their technical support.
This is the third in a series of dissertations on the topic of GPS navi-
gation for spacecraft rendezvous applications, so I would like to acknowledge
the work of Takuji Ebinuma and Jaeyong Um, which provided the foundation
for this research. I would also like to thank Oliver Montenbruck for allowing
me to translate his SAT_Lib software library to Java.
The results presented in this dissertation were produced using software
from the Java Astrodynamics Toolkit, an open source software library, which
can be found on the Internet at: http://jat.sourceforge.net.
iv

Integrated GPS/INS Navigation System Design for
Autonomous Spacecraft Rendezvous
Publication No.
David Edward Gaylor, Ph.D.
The University of Texas at Austin, 2003
Supervisor: E. Glenn Lightsey
The goal of the NASA Space Launch Initiative (SLI) program is to
advance the technologies for the next generation reusable launch vehicle (RLV).
The SLI program has identified automated rendezvous and docking as an area
requiring further research and development. Currently, the Space Shuttle uses
a partially manual system for rendezvous, but a fully automated system could
be safer and more reliable.
Previous studies have shown that it is feasible to use the Global Po-
sitioning System (GPS) for spacecraft navigation during rendezvous with the
International Space Station (ISS). However, these studies have not accounted
for the effects of GPS signal blockage and multipath in the vicinity of the ISS,
which make a GPS-only navigation system less accurate and reliable.
One possible solution is to combine GPS with an inertial navigation
system (INS). The integration of GPS and INS can be achieved using a Kalman
v

filter. GPS/INS systems have been used in aircraft for many years and have
also been used in launch vehicles. However, the performance of GPS/INS
systems in orbit and during spacecraft rendezvous has not been characterized.
The primary objective of this research is to evaluate the ability of an
integrated GPS/INS to provide accurate navigation solutions during a ren-
dezvous scenario where the effects of ISS signal blockage, multipath and delta-v
maneuvers degrade GPS-only navigation. In order to accomplish this, GPS-
only and GPS/INS Kalman filters have been developed for both absolute and
relative navigation, as well as a new statistical multipath model for spacecraft
operating near the ISS.
Several factors that affect relative navigation performance were stud-
ied, including: filter tuning, GPS constellation geometry, rendezvous approach
direction, and inertial sensor performance. The results showed that each of
these factors has a large impact on relative navigation performance.
Finally, it has been demonstrated that a GPS/INS system based on
medium accuracy aircraft avionics-grade inertial sensors does not provide ad-
equate relative navigation performance for rendezvous with the ISS unless
accelerometer thresholding is used. However, the use of state-of-the-art iner-
tial navigation sensors provides relative position accuracy which is adequate
for rendezvous with ISS if an additional rendezvous sensor is included.
vi

Table of Contents
Acknowledgments iv
Abstract v
List of Tables xiii
List of Figures xv
Chapter 1. Introduction 1
1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Previous Work . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Research Contributions . . . . . . . . . . . . . . . . . . . . . . 7
1.3.1 INS Error Model . . . . . . . . . . . . . . . . . . . . . . 7
1.3.2 ISS Signal Blockage Model . . . . . . . . . . . . . . . . 7
1.3.3 ISS Multipath Model . . . . . . . . . . . . . . . . . . . 8
1.3.4 GPS/INS Extended Kalman Filter Design and Analysis 8
1.3.5 Rendezvous Simulation and Navigation Design Tool . . 10
1.4 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Chapter 2. Coordinate and Time Systems 12
2.1 Reference Frames . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.1 Earth Centered Inertial (ECI) . . . . . . . . . . . . . . . 13
2.1.2 Earth Centered Earth Fixed (ECEF) . . . . . . . . . . . 13
2.1.3 Spacecraft Centered (UVW) . . . . . . . . . . . . . . . 13
2.1.4 Body Frame . . . . . . . . . . . . . . . . . . . . . . . . 14
2.1.5 Navigation Frame . . . . . . . . . . . . . . . . . . . . . 15
2.1.6 Coordinate Transformations . . . . . . . . . . . . . . . . 15
2.1.7 Quaternions . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1.8 Small Angle Transformations . . . . . . . . . . . . . . . 18
vii
2.2 Time Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.1 Time Scales . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.2 Time Formats . . . . . . . . . . . . . . . . . . . . . . . 20
Chapter 3. GPS Measurement Models 21
3.1 GPS Constellation Model . . . . . . . . . . . . . . . . . . . . . 22
3.1.1 GPS Ephemeris Parameters . . . . . . . . . . . . . . . . 22
3.1.2 GPS SV Position Equations . . . . . . . . . . . . . . . . 23
3.1.3 GPS SV Velocity Equations . . . . . . . . . . . . . . . . 26
3.2 GPS Measurement Equations . . . . . . . . . . . . . . . . . . . 27
3.2.1 Pseudorange Measurement . . . . . . . . . . . . . . . . 27
3.2.2 Range Rate Equation . . . . . . . . . . . . . . . . . . . 29
3.2.3 Carrier Phase Measurement . . . . . . . . . . . . . . . . 29
3.2.4 Satellite Motion During Signal Propagation . . . . . . . 30
3.3 GPS Measurement Error Models . . . . . . . . . . . . . . . . . 31
3.3.1 Pseudorange and Carrier Phase . . . . . . . . . . . . . . 31
3.3.2 Single Difference Carrier Phase . . . . . . . . . . . . . . 32
3.4 ISS Blockage and Multipath Models . . . . . . . . . . . . . . . 33
3.4.1 ISS Signal Blockage Model . . . . . . . . . . . . . . . . 33
3.4.2 ISS Multipath Model . . . . . . . . . . . . . . . . . . . 36
3.4.3 GPS Carrier Phase Measurement Errors . . . . . . . . . 39
3.4.4 GPS C/A Code Measurement Errors . . . . . . . . . . . 39
3.4.4.1 Conjectures . . . . . . . . . . . . . . . . . . . . 41
3.4.4.2 Multipath Model Algorithm . . . . . . . . . . . 45
3.5 ISS and Spacecraft Orbit Models . . . . . . . . . . . . . . . . . 46
3.6 ISS Blockage Study Results . . . . . . . . . . . . . . . . . . . . 46
3.7 Multipath Study Results . . . . . . . . . . . . . . . . . . . . . 48
3.7.1 Geometry Dependence . . . . . . . . . . . . . . . . . . . 48
3.7.2 Distance from ISS . . . . . . . . . . . . . . . . . . . . . 49
3.7.3 Number of Multipath Rays . . . . . . . . . . . . . . . . 50
3.7.4 ISS Radar Cross-sectional Area . . . . . . . . . . . . . . 51
3.7.5 Model Tuning and Validation . . . . . . . . . . . . . . . 54
viii

Chapter 4. Inertial Navigation 56
4.1 Fundamentals of Inertial Navigation . . . . . . . . . . . . . . . 56
4.2 INS Error Sources . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2.1 Initialization Errors . . . . . . . . . . . . . . . . . . . . 58
4.2.2 System Alignment Errors . . . . . . . . . . . . . . . . . 58
4.2.3 Sensor Errors . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2.3.1 Gyro Measurement Noise . . . . . . . . . . . . 59
4.2.3.2 Gyro Drift (Bias) . . . . . . . . . . . . . . . . 59
4.2.3.3 Gyro Scale Factor . . . . . . . . . . . . . . . . . 59
4.2.3.4 Gyro Misalignments . . . . . . . . . . . . . . . 60
4.2.3.5 Gyro G-Sensitivity . . . . . . . . . . . . . . . . 60
4.2.3.6 Accelerometer Measurement Noise . . . . . . . 60
4.2.3.7 Accelerometer Bias . . . . . . . . . . . . . . . 60
4.2.3.8 Accelerometer Scale Factor . . . . . . . . . . . . 61
4.2.3.9 Accelerometer Misalignments . . . . . . . . . . 61
4.2.3.10 Accelerometer Non-linearity . . . . . . . . . . . 61
4.2.4 Gravity Model Errors . . . . . . . . . . . . . . . . . . . 61
4.2.5 Quantization and Computational Errors . . . . . . . . . 61
4.3 INS Error Model . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.3.1 Derivation of INS Error Model . . . . . . . . . . . . . . 62
4.3.2 Sensor Error Models . . . . . . . . . . . . . . . . . . . . 65
4.3.2.1 Gyro Error Model . . . . . . . . . . . . . . . . 65
4.3.2.2 Accelerometer Error Model . . . . . . . . . . . 66
4.3.3 Augmented INS Error Model . . . . . . . . . . . . . . . 67
4.3.3.1 Adding Gyro and Accelerometer Bias States . . 68
Chapter 5. GPS/INS Integration and Simulation 70
5.1 GPS/INS Simulation Description . . . . . . . . . . . . . . . . 70
5.1.1 Rendezvous Trajectory Generation . . . . . . . . . . . . 70
5.1.1.1 Rendezvous Guidance . . . . . . . . . . . . . . 73
5.1.1.2 Intercept Equation . . . . . . . . . . . . . . . . 73
5.1.1.3 Glideslope Targeting . . . . . . . . . . . . . . . 74
ix

5.1.1.4 Converting Impulses to Finite Burns . . . . . . 76
5.1.1.5 Open Loop vs. Closed Loop Guidance . . . . . 77
5.1.1.6 R-bar Approach . . . . . . . . . . . . . . . . . . 78
5.1.1.7 V-bar Approach . . . . . . . . . . . . . . . . . . 81
5.1.2 Generation of Simulated INS Measurements . . . . . . . 84
5.1.3 GPS Measurement Generation . . . . . . . . . . . . . . 89
5.1.3.1 Pseudorange and Carrier Phase Measurements . 89
5.1.3.2 Single Difference Carrier Phase Measurements . 90
5.1.3.3 GPS Receiver Clock Model . . . . . . . . . . . 91
5.1.3.4 Ionospheric Delay . . . . . . . . . . . . . . . . . 92
5.1.3.5 SV Clock and Ephemeris Errors . . . . . . . . . 94
5.1.3.6 Integer Ambiguity . . . . . . . . . . . . . . . . 95
5.2 GPS/INS Integration . . . . . . . . . . . . . . . . . . . . . . . 95
5.2.1 Extended Kalman Filter Equations . . . . . . . . . . . . 97
5.2.2 Numerical Integration of INS Solution . . . . . . . . . . 98
5.2.2.1 Analysis of Integration Algorithm Accuracy . . 100
5.2.3 State Propagation Models . . . . . . . . . . . . . . . . . 101
5.2.3.1 Earth Gravity Model . . . . . . . . . . . . . . . 102
5.2.3.2 Atmospheric Drag Model . . . . . . . . . . . . . 102
5.2.3.3 Drag Coefficient Correction State . . . . . . . . 103
5.2.3.4 Gyro and Accelerometer Bias States . . . . . . 104
5.2.3.5 GPS Receiver Clock States . . . . . . . . . . . . 104
5.2.3.6 Ionospheric Delay State . . . . . . . . . . . . . 104
5.2.3.7 URE State . . . . . . . . . . . . . . . . . . . . . 105
5.2.3.8 Integer Ambiguity State . . . . . . . . . . . . . 105
5.2.4 Process Noise Covariance . . . . . . . . . . . . . . . . . 106
5.2.5 Measurement Models . . . . . . . . . . . . . . . . . . . 107
5.2.5.1 Measurement Noise Covariance . . . . . . . . . 108
5.2.6 GPS/INS Absolute Navigation Filter . . . . . . . . . . . 109
5.2.7 GPS/INS Relative Navigation Filter . . . . . . . . . . . 110
5.2.8 GPS-only Relative Navigation Filter . . . . . . . . . . . 111
x

Chapter 6. GPS/INS Simulation Results 112
6.1 Absolute Navigation . . . . . . . . . . . . . . . . . . . . . . . . 112
6.1.1 C/A Code vs. Carrier Phase Measurements . . . . . . . 112
6.1.2 Absolute Navigation Filter Results . . . . . . . . . . . . 115
6.2 Relative Navigation . . . . . . . . . . . . . . . . . . . . . . . . 125
6.2.1 State Vector vs. Measurement Differencing . . . . . . . 126
6.2.2 Addition of a Thrust Model in GPS-Only Filter . . . . . 129
6.2.3 Filter Tuning . . . . . . . . . . . . . . . . . . . . . . . . 132
6.2.3.1 GPS-Only Filter Tuning . . . . . . . . . . . . . 132
6.2.3.2 GPS/INS Filter Tuning . . . . . . . . . . . . . 142
6.2.3.3 Tuning Comparison . . . . . . . . . . . . . . . . 155
6.2.4 Constellation Geometry and Approach Directions . . . . 159
6.2.5 Accelerometer Thresholding . . . . . . . . . . . . . . . . 162
6.2.6 Improved Inertial Sensors . . . . . . . . . . . . . . . . . 163
6.2.7 Use of GPS Satellites Below the Horizon . . . . . . . . . 167
6.2.8 Gain Scheduling . . . . . . . . . . . . . . . . . . . . . . 169
6.2.9 Monte Carlo Study . . . . . . . . . . . . . . . . . . . . . 170
Chapter 7. Conclusions 175
7.1 Summary of Results . . . . . . . . . . . . . . . . . . . . . . . . 175
7.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
Appendices 185
Appendix A. Unaided INS Simulation Results 186
A.1 Unforced Error Response . . . . . . . . . . . . . . . . . . . . . 187
A.1.1 Response to Initial Position Errors . . . . . . . . . . . . 188
A.1.2 Response to Initial Velocity Errors . . . . . . . . . . . . 190
A.1.3 Response to Initial Platform Tilts . . . . . . . . . . . . 192
A.2 Forced Error Response . . . . . . . . . . . . . . . . . . . . . . 194
A.2.1 Zero Specific Force Case . . . . . . . . . . . . . . . . . . 194
A.2.1.1 Response to Gyro Scale Factor Error and Mis-alignments . . . . . . . . . . . . . . . . . . . . . 194
xi

A.2.1.2 Response to Constant Gyro Biases . . . . . . . 196
A.2.1.3 Response to Gyro Measurement Noise . . . . . 197
A.2.2 Constant Specific Force Cases . . . . . . . . . . . . . . . 198
A.2.2.1 Response to Gyro Errors . . . . . . . . . . . . . 198
A.2.2.2 Response to Accelerometer Scale Factor Error . 205
A.2.2.3 Response to Accelerometer Misalignments . . . 208
A.2.2.4 Response to Constant Accelerometer Biases . . 212
A.2.2.5 Response to Accelerometer Measurement Noise 214
A.3 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
Appendix B. Stochastic Process Models 219
B.1 White Gaussian Noise . . . . . . . . . . . . . . . . . . . . . . . 219
B.2 Gaussian Random Constant . . . . . . . . . . . . . . . . . . . 219
B.3 Random Walk . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
B.4 First Order Markov . . . . . . . . . . . . . . . . . . . . . . . . 220
B.5 Equivalent Discrete-Time Models . . . . . . . . . . . . . . . . 220
B.5.1 First Order Markov . . . . . . . . . . . . . . . . . . . . 222
B.5.2 Random Walk . . . . . . . . . . . . . . . . . . . . . . . 222
Bibliography 223
Vita 230
xii

List of Tables
1.1 Space Shuttle Navigation Sensors[18] . . . . . . . . . . . . . . 2
3.1 GPS Satellite Ephemeris Parameters [33] . . . . . . . . . . . . 23
3.2 ISS Orbit Elements. . . . . . . . . . . . . . . . . . . . . . . . . 46
3.3 GPS Signal Outage Statistics (All-In-View Receiver) . . . . . 47
5.1 Spacecraft Characteristics . . . . . . . . . . . . . . . . . . . . 72
5.2 Chaser Nominal Thrust for Each Maneuver Type . . . . . . . 76
5.3 Initial ISS Orbit Elements . . . . . . . . . . . . . . . . . . . . 78
5.4 R-bar Approach Guidance Targets . . . . . . . . . . . . . . . . 79
5.5 R-bar Approach Maneuvers . . . . . . . . . . . . . . . . . . . 79
5.6 V-bar Approach Guidance Targets . . . . . . . . . . . . . . . 82
5.7 V-bar Approach Maneuvers . . . . . . . . . . . . . . . . . . . 82
5.8 SIGI Sensor Characteristics [41] . . . . . . . . . . . . . . . . . 88
5.9 Observed Ephemeris and Clock Errors . . . . . . . . . . . . . 94
5.10 Exponential Atmospheric Model [42] . . . . . . . . . . . . . . 103
5.11 GPS/INS Absolute Navigation Filter States . . . . . . . . . . 109
5.12 GPS/INS Relative Navigation Filter States . . . . . . . . . . . 110
5.13 GPS-only Relative Navigation Filter States . . . . . . . . . . . 111
6.1 Multipath Model Parameters . . . . . . . . . . . . . . . . . . . 115
6.2 GPS/INS Absolute Navigation Filter Process Noise . . . . . . 117
6.3 GPS-Only Absolute Navigation Filter Process Noise . . . . . . 117
6.4 GPS/INS vs GPS-Only Absolute Navigation Comparison . . . 124
6.5 GPS-Only Relative Navigation Filter Process Noise . . . . . . 133
6.6 GPS/INS Relative Navigation Filter Process Noise . . . . . . 143
6.7 Relative Navigation Filter Tuning Comparison . . . . . . . . . 156
6.8 GPS-only Relative Navigation Performance . . . . . . . . . . . 161
xiii

6.9 GPS/INS Relative Navigation Performance . . . . . . . . . . . 162
6.10 GPS/INS Relative Navigation Performance, Accelerometer Thresh-olding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
6.11 SIMU Sensor Characteristics . . . . . . . . . . . . . . . . . . . 165
6.12 GPS/SIMU Relative Navigation Performance . . . . . . . . . 166
6.13 GPS-only Relative Navigation Performance, Relative Naviga-tion Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
6.14 GPS/SIMU Relative Navigation Performance, Relative Naviga-tion Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
6.15 Relative Navigation Gain Scheduling vs. Relative NavigationTuning Comparison . . . . . . . . . . . . . . . . . . . . . . . . 170
6.16 Monte Carlo Study Results . . . . . . . . . . . . . . . . . . . . 172
A.1 Simulation Orbit Parameters . . . . . . . . . . . . . . . . . . . 186
xiv

List of Figures
3.1 The ISS Blockage and Multipath Scenario . . . . . . . . . . . 33
3.2 Line of Sight Vector Definitions . . . . . . . . . . . . . . . . . 34
3.3 GPS Signal Blockage Model . . . . . . . . . . . . . . . . . . . 36
3.4 Range Errors and Direct Signal Elevation Angles . . . . . . . 49
3.5 Carrier Phase Range Errors at 50m, 100 m and 200 m Belowthe ISS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.6 C/A Code Range Errors at 50m, 100 m and 200 m Below the ISS 51
3.7 Carrier Phase Range Errors with Various Numbers of MultipathRays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.8 C/A Code Range Errors with Various Numbers of MultipathRays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.9 Carrier Phase Range Errors with Different ISS Radar Cross-sectional Areas . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.10 C/A Code Range Errors with Different ISS Radar Cross-sectionalAreas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.11 Blockage and Multipath Simulation Flow Chart . . . . . . . . 55
5.1 R-bar Approach Trajectory . . . . . . . . . . . . . . . . . . . 80
5.2 R-bar Final Approach Trajectory . . . . . . . . . . . . . . . . 80
5.3 R-bar Glideslope Trajectory . . . . . . . . . . . . . . . . . . . 81
5.4 V-bar Approach Trajectory . . . . . . . . . . . . . . . . . . . 83
5.5 V-bar Final Approach Trajectory . . . . . . . . . . . . . . . . 83
5.6 GPS/INS Integration Architecture . . . . . . . . . . . . . . . 96
6.1 Rendezvous Trajectory . . . . . . . . . . . . . . . . . . . . . . 113
6.2 Comparision of Absolute Position Errors Using C/A Code andCarrier Phase Measurements . . . . . . . . . . . . . . . . . . . 114
6.3 Comparision of Absolute Velocity Errors Using C/A Code andCarrier Phase Measurements . . . . . . . . . . . . . . . . . . . 115
6.4 Number of Visible GPS SVs . . . . . . . . . . . . . . . . . . . 116
xv
6.5 Chaser Absolute Navigation Errors, GPS/INS . . . . . . . . . 118
6.6 Quaternion Estimation Errors, GPS/INS . . . . . . . . . . . . 118
6.7 Gyro Bias Estimation Errors, GPS/INS . . . . . . . . . . . . . 119
6.8 Accelerometer Bias Estimation Errors, GPS/INS . . . . . . . . 119
6.9 GPS Receiver Clock Estimation Errors, GPS/INS . . . . . . . 120
6.10 Ionospheric Delay Estimation Errors, GPS/INS . . . . . . . . 120
6.11 GPS SV Clock and Ephemeris Estimation Errors, GPS/INS . 121
6.12 Measurement Residuals, GPS/INS . . . . . . . . . . . . . . . . 121
6.13 Chaser Absolute Navigation Errors, GPS-Only . . . . . . . . . 122
6.14 GPS Receiver Clock Estimation Errors, GPS-Only . . . . . . . 122
6.15 Ionospheric Delay Estimation Errors, GPS-Only . . . . . . . . 123
6.16 GPS SV Clock and Ephemeris Estimation Errors, GPS-Only . 123
6.17 Measurement Residuals, GPS-Only . . . . . . . . . . . . . . . 124
6.18 Relative Position Errors Exchanging Absolute State Vectors . 127
6.19 Relative Velocity Errors Exchanging Absolute State Vectors . 127
6.20 Relative Position Errors Exchanging Measurements . . . . . . 128
6.21 Relative Velocity Errors Exchanging Measurements . . . . . . 128
6.22 GPS-only Relative Position Errors With and Without ThrusterModel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
6.23 GPS-only Relative Position Errors With and Without ThrusterModel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
6.24 Relative Position Errors, GPS-Only, Nominal Tuning . . . . . 133
6.25 Relative Velocity Errors, GPS-Only, Nominal Tuning . . . . . 134
6.26 Chaser Absolute Navigation Errors, GPS-Only, Nominal Tuning 134
6.27 ISS Absolute Navigation Errors, GPS-Only, Nominal Tuning . 135
6.28 GPS Receiver Clock Estimation Errors, GPS-Only, NominalTuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
6.29 Ionospheric Delay Estimation Errors, GPS-Only, Nominal Tuning136
6.30 GPS SV Clock and Ephemeris Estimation Errors, GPS-Only,Nominal Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . 136
6.31 Integer Ambiguity Estimation Errors, GPS-Only, Nominal Tuning137
6.32 Measurement Residuals, GPS-Only, Nominal Tuning . . . . . 137
6.33 Relative Position Errors, GPS-Only, Relative Navigation Tuning 138
xvi
6.34 Relative Velocity Errors, GPS-Only, Relative Navigation Tuning 138
6.35 Chaser Absolute Navigation Errors, GPS-Only, Relative Navi-gation Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
6.36 ISS Absolute Navigation Errors, GPS-Only, Relative Naviga-tion Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
6.37 GPS Receiver Clock Estimation Errors, GPS-Only, RelativeNavigation Tuning . . . . . . . . . . . . . . . . . . . . . . . . 140
6.38 Ionospheric Delay Estimation Errors, GPS-Only, Relative Nav-igation Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
6.39 GPS SV Clock and Ephemeris Estimation Errors, GPS-Only,Relative Navigation Tuning . . . . . . . . . . . . . . . . . . . 141
6.40 Integer Ambiguity Estimation Errors, GPS-Only, Relative Nav-igation Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
6.41 Measurement Residuals, GPS-Only, Relative Navigation Tuning 142
6.42 Relative Position Errors, GPS/INS, Nominal Tuning . . . . . 143
6.43 Relative Velocity Errors, GPS/INS, Nominal Tuning . . . . . 144
6.44 Chaser Absolute Navigation Errors, GPS/INS, Nominal Tuning 144
6.45 ISS Absolute Navigation Errors, GPS/INS, Nominal Tuning . 145
6.46 Quaternion Estimation Errors, GPS/INS, Nominal Tuning . . 145
6.47 Gyro Bias Estimation Errors, GPS/INS, Nominal Tuning . . . 146
6.48 Accelerometer Bias Estimation Errors, GPS/INS, Nominal Tun-ing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
6.49 GPS Receiver Clock Estimation Errors, GPS/INS, Nominal Tun-ing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
6.50 Ionospheric Delay Estimation Errors, GPS/INS, Nominal Tuning147
6.51 GPS SV Clock and Ephemeris Estimation Errors, GPS/INS,Nominal Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . 148
6.52 Integer Ambiguity Estimation Errors, GPS/INS, Nominal Tuning148
6.53 Measurement Residuals, GPS/INS, Nominal Tuning . . . . . . 149
6.54 Relative Position Errors, GPS/INS, Relative Navigation Tuning 149
6.55 Relative Velocity Errors, GPS/INS, Relative Navigation Tuning 150
6.56 Chaser Absolute Navigation Errors, GPS/INS, Relative Navi-gation Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
6.57 ISS Absolute Navigation Errors, GPS/INS, Relative NavigationTuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
xvii

6.58 Quaternion Estimation Errors, GPS/INS, Relative NavigationTuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
6.59 Gyro Bias Estimation Errors, GPS/INS, Relative NavigationTuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.60 Accelerometer Bias Estimation Errors, GPS/INS, Relative Nav-igation Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.61 GPS Receiver Clock Estimation Errors, GPS/INS, Relative Nav-igation Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.62 Ionospheric Delay Estimation Errors, GPS/INS, Relative Nav-igation Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.63 GPS SV Clock and Ephemeris Estimation Errors, GPS/INS,Relative Navigation Tuning . . . . . . . . . . . . . . . . . . . 154
6.64 Integer Ambiguity Estimation Errors, GPS/INS, Relative Nav-igation Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
6.65 Measurement Residuals, GPS/INS, Relative Navigation Tuning 155
6.66 Relative Position Error Comparison . . . . . . . . . . . . . . . 156
6.67 Relative Velocity Error Comparison . . . . . . . . . . . . . . . 157
6.68 Number of Visible GPS SVs vs. Time for Various ConstellationGeometry and Approach Directions . . . . . . . . . . . . . . . 160
6.69 GPS/SIMU Relative Position Error Sigmas During Final Ap-proach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
6.70 GPS/SIMU Relative Velocity Error Sigmas During Final Ap-proach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
6.71 GPS/SIMU Relative Position Error Sigmas During Filter Con-vergence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
6.72 GPS/SIMU Relative Velocity Error Sigmas During Filter Con-vergence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
A.1 Navigation Errors Due to an Initial Radial Position Error . . . 189
A.2 Navigation Errors Due to an Initial Along-track Position Error 189
A.3 Navigation Errors Due to an Initial Cross-track Position Error 190
A.4 Navigation Errors Due to an Initial Radial Velocity Error . . . 191
A.5 Navigation Errors Due to an Initial Along-track Velocity Error 192
A.6 Navigation Errors Due to an Initial Cross-track Velocity Error 193
A.7 Tilt Errors Due to Initial Tilt Errors . . . . . . . . . . . . . . 193
A.8 Tilt Errors Due to Gyro Scale Factor and Misalignments . . . 195
xviii

A.9 Tilt Errors Due to Constant Gyro Biases . . . . . . . . . . . . 196
A.10 Tilt Errors Due to Gyro Measurement Noise . . . . . . . . . . 197
A.11 Errors Due to Gyro Scale Factor Error with Along-Track Ac-celeration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
A.12 Errors Due to Constant Gyro Bias with Along-Track Acceleration200
A.13 Errors Due to Gyro Scale Factor Error with Radial Acceleration 201
A.14 Errors Due to Constant Gyro Bias with Radial Acceleration . 202
A.15 Errors Due to Gyro Misalignment with Cross-Track Acceleration203
A.16 Errors Due to Gyro Misalignment with Cross-Track Acceleration203
A.17 Errors Due to Constant Gyro Bias with Cross-Track Acceleration204
A.18 Errors Due to Constant Gyro Bias with Cross-Track Acceleration204
A.19 Errors Due to 350 ppm V-Accel Scale Factor Error with Along-Track Acceleration . . . . . . . . . . . . . . . . . . . . . . . . 206
A.20 Errors Due to 350 ppm U-Accel Scale Factor Error with RadialAcceleration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
A.21 Errors Due to 350 ppm W-Accel Scale Factor Error with Cross-Track Acceleration . . . . . . . . . . . . . . . . . . . . . . . . 207
A.22 Errors Due to 20 arc-s U-Accel Misalignment about W withAlong-Track Acceleration . . . . . . . . . . . . . . . . . . . . . 208
A.23 Errors Due to 20 arc-s W-Accel Misalignment about U withAlong-Track Acceleration . . . . . . . . . . . . . . . . . . . . . 209
A.24 Errors Due to 20 arc-s V-Accel Misalignment about W withRadial Acceleration . . . . . . . . . . . . . . . . . . . . . . . . 210
A.25 Errors Due to 20 arc-s W-Accel Misalignment about V withRadial Acceleration . . . . . . . . . . . . . . . . . . . . . . . . 210
A.26 Errors Due to 20 arc-s U-Accel Misalignment about V withCross-Track Acceleration . . . . . . . . . . . . . . . . . . . . . 211
A.27 Errors Due to 20 arc-s V-Accel Misalignment about U withCross-Track Acceleration . . . . . . . . . . . . . . . . . . . . . 212
A.28 Errors Due to 0.1 mg Constant V-Accel Bias with Along-TrackAcceleration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
A.29 Errors Due to 0.1 mg Constant U-Accel Bias with Radial Ac-celeration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
A.30 Errors Due to 0.1 mg Constant W-Accel Bias with Cross-TrackAcceleration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
xix

A.31 Errors Due to 10 micro-g/rt-Hz V-Accel Measurement Noisewith Along-Track Acceleration . . . . . . . . . . . . . . . . . . 215
A.32 Errors Due to 10 micro-g/rt-Hz U-Accel Measurement Noisewith Radial Acceleration . . . . . . . . . . . . . . . . . . . . . 216
A.33 Errors Due to 10 micro-g/rt-Hz W-Accel Measurement Noisewith Cross-Track Acceleration . . . . . . . . . . . . . . . . . . 216
xx
Chapter 1
Introduction
1.1 Background
The goal of NASA’s Space Launch Initiative (SLI) program is to ad-
vance the technologies needed to develop a space transportation system that
is safer, more reliable and less expensive than today’s Space Shuttle. These
technologies will be incorporated in the next generation reusable launch vehi-
cle (RLV), which is planned to be operational some time in the next decade.
The design and development of a next-generation crew transport vehicle is one
of the objectives of the SLI. [9]
Automated rendezvous and docking has been identified by the SLI pro-
gram as an area requiring further research and development. Currently, the
Space Shuttle uses a partially manual system for rendezvous, but a fully au-
tomated system could be safer and more reliable. [27]
The Orbital Space Plane (OSP) is intended to provide crew rescue,
crew transport and limited cargo access to and from the International Space
Station (ISS). The OSP will initially serve as a crew rescue vehicle for the ISS,
enabling a crew of at least four to depart safely in the event of an emergency
or an injured or ill crewmember. In an emergency, the OSP will be required
1
to quickly separate from the ISS and return to Earth. [8]
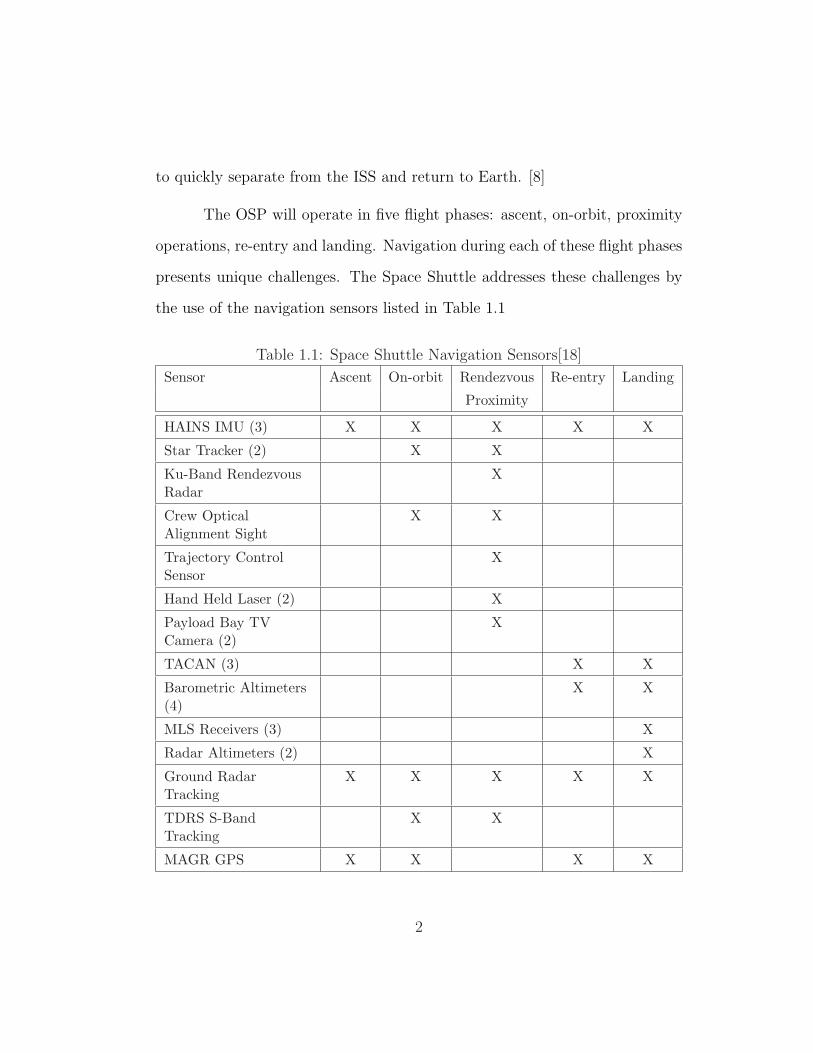
The OSP will operate in five flight phases: ascent, on-orbit, proximity
operations, re-entry and landing. Navigation during each of these flight phases
presents unique challenges. The Space Shuttle addresses these challenges by
the use of the navigation sensors listed in Table 1.1
Table 1.1: Space Shuttle Navigation Sensors[18]
Sensor Ascent On-orbit Rendezvous Re-entry Landing
Proximity
HAINS IMU (3) X X X X X
Star Tracker (2) X X
Ku-Band RendezvousRadar
X
Crew OpticalAlignment Sight
X X
Trajectory ControlSensor
X
Hand Held Laser (2) X
Payload Bay TVCamera (2)
X
TACAN (3) X X
Barometric Altimeters(4)
X X
MLS Receivers (3) X
Radar Altimeters (2) X
Ground RadarTracking
X X X X X
TDRS S-BandTracking
X X
MAGR GPS X X X X
2
Many of these sensors are used only during one or two flight phases.
The complexity, weight, reliability, and power consumption of this suite of
navigation sensors leads to the question: is it possible to design an all flight
phase navigation system with fewer sensors?
A GPS-only navigation system is not adequate because GPS is subject
to outages due to blockage, atmospheric ionization during re-entry, and delta-
v maneuvers. GPS is also subject to errors and integrity problems due to
multipath and other sources. For example, when a spacecraft approaches the
ISS to perform rendezvous and docking, the signals from the GPS satellites
may be blocked by the ISS or degraded by multipath signals reflected by the
ISS.
An unaided inertial navigation system (INS) is not adequate because
the navigation errors of an INS grow without bound over time. The errors
of even today’s most accurate INS systems would become unacceptably large
after several orbits, especially for rendezvous or re-entry.
One possible solution may be to combine GPS with an INS. GPS and
INS are complementary technologies. INS is accurate in the short-term and is
self-contained. GPS is accurate in the long-term but requires access to the GPS
signals. An integrated GPS/INS could take advantage of the strengths of both
systems while minimizing the impact of their weaknesses. The integration of
GPS and INS can be achieved using a Kalman filter, which attempts to find the
optimal navigation solution by proper weighting of the inputs from the GPS
and INS. The Kalman filter could be designed to recognize and adapt itself to
3
the current flight phase, therefore ensuring adequate performance during all
flight phases.
Integrated GPS/INS systems have been used in commercial launch ve-
hicles for the ascent phase. Their performance has been analyzed for the re-
entry and landing phases by Braden, Browning and Gelderloos.[5] GPS/INS
systems have been demonstrated to be capable of precision landing.[14] How-
ever, the performance of GPS/INS systems during remaining flight phases:
on-orbit and proximity operations, has not been completely characterized.
Therefore, the objective of this research is to determine if GPS/INS
navigation during a rendezvous with the ISS is feasible with existing inertial
sensor technology and if not, determine the requirements for future GPS and
inertial sensor technology to make it feasible.
A GPS/INS system is passive and self-contained, requiring only the
availability of GPS signals. Therefore, it can be used during all flight phases.
On the other hand, star trackers and TDRS can typically only be used during
the on-orbit flight phases. Furthermore, since GPS/INS is capable of support-
ing precision landing, it can replace TACAN, MLS receivers, and ground-based
radar, which require extensive support infrastructure on the ground. In ad-
dition to position and velocity information, GPS/INS can provide time and
attitude information. If GPS/INS can be shown to perform adequately for
rendezvous, it would provide a minimum set of sensors capable of navigating
during all mission phases.
4

1.2 Previous Work
The Space Integrated GPS/INS (SIGI) is an example of a spaceborne
integrated GPS/INS system. SIGI is a modified Honeywell H764G Embedded
GPS/INS system which is used on the ISS and was planned to be used on the
Crew Return Vehicle (CRV) before that program was cancelled.[47]
The SIGI flew on seven Space Shuttle missions from September 1997
to December 1999. ISS SIGIs were flown during STS-101 and STS-106 for
the SIGI Orbital Attitude Readiness (SOAR) experiment. The CRV SIGI
was flown on STS-100 and STS-108. The SIGI has been in operational use
on-board the ISS for position, velocity, and attitude since April 2002. How-
ever, the deactivation of Selective Availability and technical issues with the
GPS/INS filter has caused the ISS program to rely on the deterministic GPS-
only position and velocity solution from the embedded Force 19 GPS receiver.
[19]
During re-entry, GPS signals are not available during the “blackout re-
gion” because the air molecules around the vehicle become ionized, interfering
with radio signals. The SIGI was tested during the entire de-orbit and landing
on STS-100 and STS-108. During STS-100, the GPS receiver was not aided
and the GPS receiver dead-reckoned through the blackout region. The receiver
started tracking less than four GPS satellites at 240,000 feet and did not reac-
quire until 130,000 feet. The total time with less than four GPS satellites was
16 minutes. During STS-108, the GPS receiver was inertially aided and reac-
quired at 210,000 feet for a total time with less than four GPS satellites of six
5
minutes, demonstrating the benefit of integrating GPS and INS technology.
[17]
Much work has been done on integrated GPS/INS systems for aircraft
and missiles. There are many examples of these systems in operation today,
such as the Honeywell H764G Embedded GPS/INS, which is currently being
flown in several military aircraft and has been shown to be capable of precision
approach and landing by Elchynski.[14]
Ebinuma demonstrated the use of GPS-only navigation for rendezvous.
He developed an extended Kalman filter to perform real-time relative naviga-
tion and used a hardware-in-the-loop test facility, which integrates navigation
and guidance for rendezvous. However, his models assumed that GPS was
always available and did not include multipath or blockage of the GPS signals.
[13]
The recent research on navigation during proximity operations con-
ducted by Um examined spacecraft relative navigation using an integrated
GPS/INS in the vicinity of the ISS. [41] The GPS/INS was a loosely coupled
system, which included two Kalman filters, one to process the GPS measure-
ments and the other to combine the INS measurements with the output of the
GPS filter. The INS part of the system was simulated in software and the
GPS measurements were collected from a Mitel Architect GPS receiver being
stimulated by a Spirent STR4760 GPS simulator.
6
1.3 Research Contributions
The primary objective of this research is to evaluate the ability of an
integrated GPS/INS to provide accurate navigation solutions during a ren-
dezvous scenario where the effects of ISS signal blockage, multipath and delta-
v maneuvers degrade GPS navigation. In order to accomplish this, models for
an INS operating in orbit, ISS signal blockage and multipath have been devel-
oped and incorporated into a simulation of a GPS/INS during rendezvous.
1.3.1 INS Error Model
An error model for an INS operating in orbit has been developed. This
model has been used to provide the first known characterization of the behavior
on an INS in orbit, which is provided in Appendix A. This characterization can
be used to understand how inertial sensor errors affect navigation performance
in space.
Another contribution is the development of an algorithm for generating
simulated accelerometer and gyro measurements incorporating all significant
error sources. This is the first known publicly available description of such an
algorithm.
1.3.2 ISS Signal Blockage Model
This study is the first known analysis of the effects of the ISS blocking
GPS signals on GPS navigation near the ISS. The ISS is modelled as a sphere,
which given the receiver’s position at an instant of time, creates a cone where
7
GPS signals are blocked. While the ISS is not spherical and GPS signals are
expected to be received within the blockage cone, they may be so degraded by
multipath that it is prudent for GPS receivers to not use any measurements
coming from the area of the blockage cone.
1.3.3 ISS Multipath Model
A new statistical multipath model for spacecraft operating near the ISS
has been developed based on terrestrial urban and indoor multipath models.
The Friis transmission and bi-static radar equations have been used to estimate
parameters that normally are determined by experimental measurements of the
multipath environment. The model characterizes the multipath environment
in terms of the amplitudes, time delays and phases of the multipath signals,
which are used by the C/A code and carrier phase measurement error models
to determine the error in the GPS range measurements.
1.3.4 GPS/INS Extended Kalman Filter Design and Analysis
A complementary extended Kalman filter (EKF) for combining GPS
and INS measurements has been developed. The INS measurements provide
the reference trajectory for the EKF, which computes corrections to the ref-
erence trajectory. The reference trajectory is updated with these corrections
each filter cycle. Both absolute and relative navigation filters have been de-
veloped.
During the development of the absolute navigation filter, the navigation
8
results of using GPS C/A code measurements were compared to those resulting
from the use of GPS carrier phase measurements. For absolute navigation,
it was determined that while GPS carrier phase measurements were more
precise than C/A code measurements, the navigation accuracy was actually
better using C/A code measurements. The reason for this is that in the case
of absolute navigation, the filter was not able to adequately allocate errors
between ionospheric delay, GPS SV clock and ephemeris errors, and the integer
ambiguity.
One of the decisions to be made in the development of a GPS relative
navigation system is whether to exchange measurement data or processed state
data. In order to examine this issue, the absolute navigation filter was run
for both the chaser and ISS and their states were differenced to provide a
relative navigation state. These results were compared to the output of the
relative navigation filter which processed measurements from both the chaser
and ISS. The comparison showed about an order of magnitude improvement
in accuracy when using the relative navigation filter, demonstrating the value
of exchanging measurement data rather than processed state data for relative
navigation.
The inertial sensors come into play mostly during the final phase of
rendezvous, where GPS signals are blocked and are subject to multipath and
many small delta-v and attitude maneuvers that degrade the GPS navigation
performance. To demonstrate the value of the INS during this time, a high-
fidelity rendezvous simulation was developed which includes an algorithm for
9

computing delta-v maneuvers to create a decelerating glideslope trajectory.
The results of a GPS-only relative navigation filter, the GPS/INS relative
navigation filter with the SIGI inertial sensors, and the GPS/INS relative
navigation filter with improved inertial sensors were analyzed and compared.
1.3.5 Rendezvous Simulation and Navigation Design Tool
One of the contributions of this research is a high-fidelity GPS/INS
rendezvous simulator. This simulator provides an accurate simulation of a
Space Shuttle-ISS rendezvous scenario, including the effects of atmospheric
drag, gravity perturbations, and finite duration burns computed by a ren-
dezvous guidance algorithm. The GPS constellation and receiver models in-
clude all significant GPS errors sources for spacecraft in orbit in order to
generate pseudorange and carrier phase measurements. The INS error model
includes all significant INS error sources to generate accelerometer and gyro
measurements.
The simulation can be used to perform trade studies and design anal-
yses for many aspects of GPS and GPS/INS navigation for spacecraft, such
as GPS antenna location and field of view, rendezvous approach direction,
inertial sensor performance, multipath mitigation techniques, and navigation
algorithms.
The simulation is part of the Java Astrodynamics Toolkit (JAT), an
open source software project. Since JAT is licensed under the GNU General
Public License and there are a number of freely available Java development
10
environments, anyone with a computer and an Internet connection can access
the source code. The JAT project is located on the Internet at: http://jat.
sourceforge.net.
1.4 Overview
This section provides an overview of the remaining chapters of this
dissertation.
Chapter 2 describes the coordinate and time systems used in this re-
search and also describes how vectors are transformed from one coordinate
system into another.
Chapter 3 provides a description of the GPS measurement models, in-
cluding the ISS signal blockage and multipath models. The results of the
blockage and multipath simulations are also presented.
Chapter 4 provides a brief introduction into inertial navigation and
describes how the INS error model equations are derived.
Chapter 5 describes the GPS/INS integration architecture, Kalman
filter equations, filter models, and a description of the GPS/INS simulation
including the methods and models used to generate the true rendezvous tra-
jectories, the INS measurements and the GPS measurements.
Chapter 6 presents the results and analysis of the GPS/INS simulations.
Chapter 7 summarizes the research, states conclusions and lists topics
for possible future work.
11
Chapter 2
Coordinate and Time Systems
2.1 Reference Frames
According to Britting, navigation is the determination of a body’s po-
sition and velocity relative to a reference frame.[6] Therefore, the precise def-
inition of the reference frames to be used is fundamental to the navigation
process.
An inertial reference frame is one where Newton’s laws of motion apply.
The origin of such a reference frame must be non-accelerating and the frame
must be non-rotating. In practice, a truly inertial reference frame cannot be
defined in the vicinity of the solar system due to the gravitational fields of all
of the planets and other bodies orbiting the sun. However, it is possible to
define reference systems that are “inertial enough” so that the deviation of
the actual motion of an object from the motion predicted by Newton’s laws is
insignificant over the time span of interest.
Inertial and non-inertial reference frames will be used. The following
reference frames will be described in the next sections: Earth Centered Inertial,
Earth Centered Earth Fixed, Spacecraft Centered, the body frame, and the
navigation frame.
12
2.1.1 Earth Centered Inertial (ECI)
The origin of the ECI system is the center of mass of the Earth. The
fundamental plane is the Earth’s equator with the x-axis pointing towards the
vernal equinox, the y-axis is 90 degrees to the east in the equatorial plane and
the z-axis points to the North Pole. Since the location of the Earth’s equator
and the vernal equinox are time dependent, the ECI frame is not inertial unless
it is fixed at a specified time. The J2000 system represents the best realization
of an ideal, inertial frame at the J2000 epoch. The motion of the equator and
the equinox can be accounted for so inertial frames at other times defined by
the equator and equinox of date can be transformed to the J2000 ECI frame.
These other inertial frames are called true-of-date because they reference the
true equator and true equinox at a particular date. [42]
2.1.2 Earth Centered Earth Fixed (ECEF)
Like the ECI frame, the origin of the ECEF system is at the Earth’s
center of mass and its fundamental plane is the Earth’s equator. The differ-
ence is that it rotates with the Earth. The x-axis is always aligned with the
Greenwich meridian. [42]
2.1.3 Spacecraft Centered (UVW)
The origin of the UVW system is the center of mass of the spacecraft
and moves with the spacecraft. The U -axis lies along the position vector from
the center of mass of the Earth to the spacecraft (radial direction). The V -axis
13

is perpendicular to the x-axis and lies in the direction of motion (along-track
direction). The W -axis completes a right-handed reference system (cross-track
direction). [42]
The basis vectors for the UVW frame can be established at any point
in time by:
U =r
|r| , W =r× v
|r× v| , V = W × U (2.1)
Position vectors or position error vectors can be transformed from the UVW
(B) frame to the ECI (I) frame using the following transformation matrix:
CIB =
[U V W
](2.2)
Velocity vectors or velocity error vectors can be transformed from the ECI
frame to the UVW frame using the velocity rule:
d
dt(r)B =
d
dt(r)I − ωBI × rI (2.3)
where ωBI is the angular velocity of the UVW frame with respect to the ECI
frame.
2.1.4 Body Frame
The body frame is attached to the INS sensor cluster and rotates with it.
In this dissertation, the attitude of the chaser spacecraft and ISS are assumed
to be perfectly maintained so that their respective body frame axes are aligned
with the local UVW frame. The INS sensor cluster and phase center of the
14
GPS antenna are assumed to be located at the spacecraft center of mass. In
a real system, there would be some distance between the spacecraft center of
mass and each sensor, usually referred to as a lever arm. However, no lever
arms are modelled in this dissertation.
2.1.5 Navigation Frame
The navigation frame is the reference frame selected for performing
the inertial navigation computations. For most terrestrial and aircraft appli-
cations, a local geographic frame is selected, however, for an Earth orbiting
spacecraft, the Earth Centered Inertial (ECI) frame is the logical choice for
the navigation frame.
2.1.6 Coordinate Transformations
The transformation of vectors between coordinate systems can be rep-
resented by an orthonormal direction cosine matrix. The direction cosine ma-
trix representing the transformation from coordinate system A to coordinate
system B is denoted by CBA . Vector transformations can also be represented
by quaternions. Both direction cosine matrices and quaternions will be used
throughout this dissertation. The relationship between direction cosine matri-
ces and quaternions is discussed in the next section.
15
2.1.7 Quaternions
In this section, the important quaternion equations are summarized.
More detailed discussions of quaternions can be found in Farrell [15] and Wertz
[45].
A quaternion is a four-parameter set of numbers that can be used to
represent the orientation of a body or reference frame with respect to another
reference frame. Although Euler angles are more intuitively appealing, quater-
nions are free of singularities and are more computationally efficient than Euler
angles or direction cosine matrices. Therefore, strapdown inertial navigation
systems typically use quaternions.
There is more than one way to define a quaternion. In this dissertation,
a quaternion is defined as:
q =
e1 sin θ2
e2 sin θ2
e3 sin θ2
cos θ2
(2.4)
where e1, e2, and e3 are components of the unit vector e representing the axis
of rotation and θ is the rotation angle.
If the quaternion represents a transformation from reference frame A
to reference frame B, then frame A is aligned with frame B when frame A is
rotated by θ radians about e. The components e1, e2 and e3 are along the
coordinate axes of frame A. The norm of the quaternion is constrained to be
equal to 1, therefore, the quaternion has only 3 degrees of freedom.
16

The time derivative of a quaternion can be shown to be: [45]
dq (t)
dt= Ω (ω (t)) q (t) (2.5)
where, ω1, ω2, and ω3 are the components of the instantaneous angular veloc-
ity vector and:
Ω (ω) =1
2
0 ω3 −ω2 ω1
−ω3 0 ω1 ω2
ω2 −ω1 0 ω3
−ω1 −ω2 −ω3 0
(2.6)
Equation (2.6) can also be written as:
dq (t)
dt= Q (q) ω (2.7)
where:
Q (q) =1
2
q4 −q3 q2
q3 q4 −q1
−q2 q1 q4
−q1 −q2 −q3
(2.8)
According to Farrell [15], the quaternion representing a transformation
can be obtained from a direction cosine matrix by the following equations:
q4 =1
2
√1 + C [1, 1] + C [2, 2] + C [3, 3] (2.9)
q =[
C[3,2]−C[2,3]4q4
C[3,2]−C[2,3]4q4
C[3,2]−C[2,3]4q4
q4
](2.10)
It should be noted that (2.10) can become ill-conditioned if q4 ≈ 0. The
equivalent direction cosine matrix can be obtained from a quaternion by the
17

following equation:
C (q) =
q21 − q2
2 − q23 + q2
4 2 (q1q2 − q3q4) 2 (q1q3 + q2q4)2 (q1q2 + q3q4) q2
2 + q24 − q2
1 − q23 2 (q2q3 − q1q4)
2 (q1q3 − q2q4) 2 (q2q3 + q1q4) q23 + q2
4 − q21 − q2
2
(2.11)
2.1.8 Small Angle Transformations
Suppose reference frame A and reference frame B are oriented differ-
ently by the following three infinitesimal rotations: δθ3 about the third axis of
frame A, δθ2 about the second axis of the resultant frame of the first rotation,
and δθ1 about the first axis of the resultant frame of the second rotation. As-
suming the angles are small, the vector transformation from frame A to frame
B is:
CBA =
1 0 00 1 δθ1
0 −δθ1 1
1 0 −δθ2
0 1 0δθ2 0 1
1 δθ3 0−δθ3 1 0
0 0 1
(2.12)
Carrying out the multiplication and assuming δθiδθj ≈ 0 leads to:
CBA =
1 δθ3 −δθ2
−δθ3 1 δθ1
δθ2 −δθ1 1
(2.13)
which can also be written:
CBA =
1 0 00 1 00 0 1
−
0 −δθ3 δθ2
δθ3 0 −δθ1
−δθ2 δθ1 0
(2.14)
2.2 Time Systems
This section presents a brief description of the time scales relevant to
this dissertation. Detailed descriptions can be found in Montenbruck [30]
18
or Vallado [42]. Relevant time scales include: Terrestrial Time (TT), Inter-
national Atomic Time (TAI), GPS Time, and Coordinated Universal Time
(UTC).
Time can be expressed using various formats such as Julian Date (JD),
Modified Julian Date (MJD), GPS Week Number, and Seconds of the Week.
2.2.1 Time Scales
The fundamental time unit in the International System of Units (SI) is
the SI second. The current definition of the second is based on the resonant
frequency of the cesium atom.
Terrestrial Time is a conceptually uniform time scale which is measured
in days of 86400 SI seconds and is the independent variable of geocentric
ephemerides.
TAI is the practical realization of a uniform time scale based on atomic
clocks and agrees with TT except for a constant offset of 32.184 seconds and
the imperfections of the atomic clocks, such that:
TT = TAI + 32.184 sec (2.15)
GPS Time is an atomic time scale used by the GPS system. It is a
continuous time scale which began at 0 hours on January 6, 1980. GPS Time
is maintained to nominally have a constant offset of 19 seconds from TAI, such
that:
TAI = GPS + 19.0 sec (2.16)
19
UTC is a non-uniform time scale, which is tied to TAI by an integer
number of seconds commonly known as leap seconds. It is updated periodically
to keep UTC in close agreement with mean solar time (UT1) due to variations
in the Earth’s rotation, such that:
TAI = UTC + leap (2.17)
where leap is the integer number of leap seconds between TAI and UTC.
Therefore, UTC is related to GPS Time by:
UTC = GPS + 19.0 sec− leap (2.18)
2.2.2 Time Formats
The Julian Date (JD) is the interval of time in days from noon, January
1, 4713 B.C. Since JD values are typically quite large and begin at noon, it is
convenient to use Modified Julian Date (MJD), which is calculated as follows:
MJD = JD − 2, 400, 000.5 (2.19)
GPS Time is commonly provided in GPS week number and and seconds
of the week. The GPS week number is the number of weeks since the zero
hour, January 6, 1980 GPS epoch, where the first week is assigned a GPS
week number of 0. The GPS week starts on Sunday at zero hours GPS Time.
Within a GPS week, time is given in seconds past the start of the week, yielding
a maximum of 604,800 seconds per week.
20
Chapter 3
GPS Measurement Models
This chapter presents the mathematical models used to simulate the
GPS constellation and to generate simulated GPS measurements. The follow-
ing assumptions are made throughout this dissertation regarding GPS naviga-
tion:
• The chaser spacecraft and ISS each have a single GPS antenna pointed
along the zenith (or radial) direction. The spacecraft is assumed to per-
fectly maintain this orientation and no attitude maneuvers are simulated.
• The GPS antenna fields of view are unobstructed except for the effect
of blockage on the chaser spacecraft due to the ISS and a 10-degree
minimum elevation horizon mask.
• The GPS receivers are either all-in-view receivers or 12-channel receivers
programmed to track the highest elevation GPS satellites.
• The GPS receivers are able to instantly acquire and lock on to new GPS
satellites as they become visible.
• The GPS receivers are L1 single frequency receivers.
21
3.1 GPS Constellation Model
The positions and velocities of the GPS satellites are required in order
to model the GPS measurements. This section presents a description of the
GPS constellation model used in this dissertation and the equations needed to
determine the GPS satellite positions and velocities.
The GPS constellation model was constructed from a daily global broad-
cast ephemeris file in the Receiver Independent Exchange (RINEX) format
obtained from the National Geodetic Survey (NGS) Continuously Operating
Reference Stations (CORS) website. This file contains the GPS broadcast
ephemeris parameters for each satellite in the constellation for March 1, 2001.
There were a total of 28 satellites in the active constellation. The ephemeris
parameters and the equations used to determine the positions of the GPS
satellites at a given time are described below. This GPS constellation model
was used for all simulations in this dissertation.
3.1.1 GPS Ephemeris Parameters
Table 3.1 presents a list of the GPS ephemeris parameters in the broad-
cast navigation message. These parameters can be used to determine the
position and velocity of a GPS satellite.
22
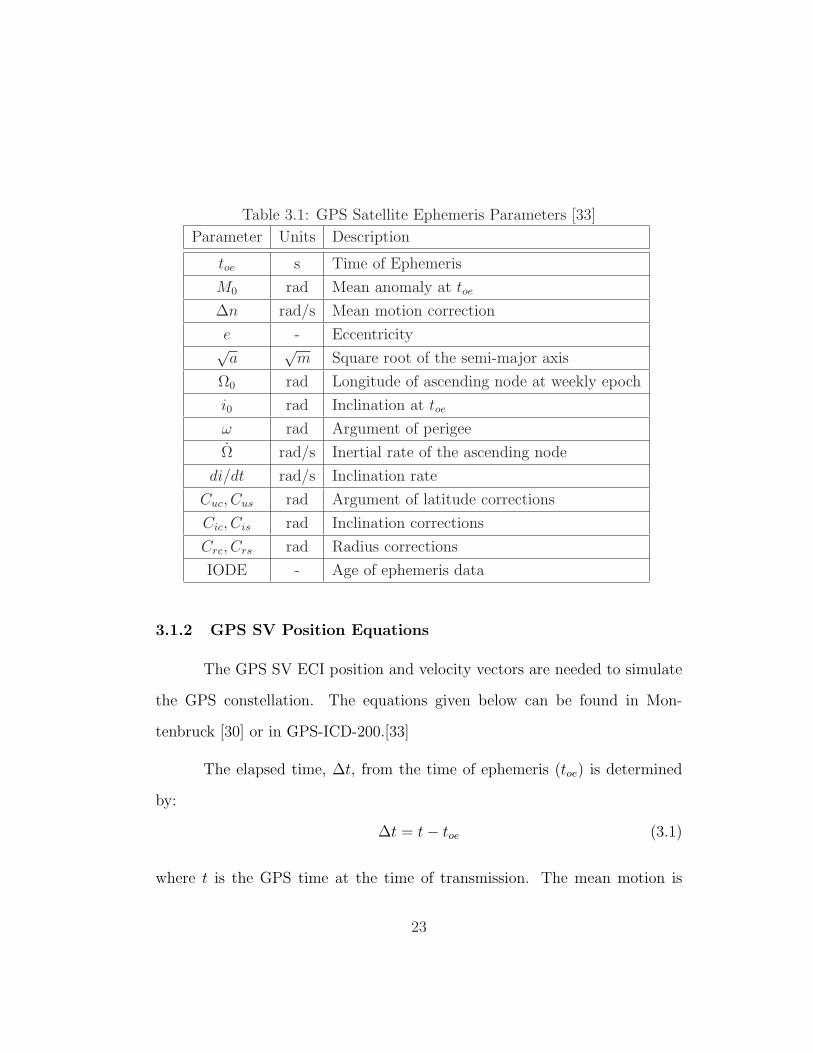
Table 3.1: GPS Satellite Ephemeris Parameters [33]
Parameter Units Description
toe s Time of Ephemeris
M0 rad Mean anomaly at toe
∆n rad/s Mean motion correction
e - Eccentricity√a
√m Square root of the semi-major axis
Ω0 rad Longitude of ascending node at weekly epoch
i0 rad Inclination at toe
ω rad Argument of perigee
Ω rad/s Inertial rate of the ascending node
di/dt rad/s Inclination rate
Cuc, Cus rad Argument of latitude corrections
Cic, Cis rad Inclination corrections
Crc, Crs rad Radius corrections
IODE - Age of ephemeris data
3.1.2 GPS SV Position Equations
The GPS SV ECI position and velocity vectors are needed to simulate
the GPS constellation. The equations given below can be found in Mon-
tenbruck [30] or in GPS-ICD-200.[33]
The elapsed time, ∆t, from the time of ephemeris (toe) is determined
by:
∆t = t− toe (3.1)
where t is the GPS time at the time of transmission. The mean motion is
23

computed using:
n =
õ
a3+ ∆n (3.2)
where µ = 3.986005 × 1014 m3
s2as defined by the WGS-84 system. Then the
mean anomaly is given by:
M = M0 + n∆t (3.3)
The eccentric anomaly is computed by iteratively solving Kepler’s equation:
M = E − e sin E (3.4)
Kepler’s equation can be solved using the following Newton iteration equation:
En+1 = En +M −Mn
1− e cos En
(3.5)
where:
Mn = En − e sin En (3.6)
The iteration can be initialized by letting E0 = M and finished when M −Mn
becomes acceptably small. The true anomaly is computed by:
ν = tan−1
[sin E
√1− e2/(1− e cos E)
(cos E − e)/(1− e cos E)
](3.7)
The uncorrected argument of latitude is defined as:
u = ν + ω (3.8)
24

The periodic corrections to the radius, argument of latitude and the inclination
can be computed using the following equations:
δr = Crs sin 2u + Crc cos 2u
δu = Cus sin 2u + Cuc cos 2u
δi = Cis sin 2u + Cic cos 2u (3.9)
The corrected orbit elements can be computed using:
r = a(1− e cos E) + δr
u = u + δu
i = i0 + (di/dt)∆t + δi (3.10)
Since the simulation requires a representative GPS constellation and
not the actual GPS constellation at a particular time, the longitude of the
ascending node (measured with respect to the ECEF frame) is treated as
the right ascension of the ascending node (measured with respect to the ECI
frame). This eliminates the need to determine the ECEF to ECI transforma-
tion matrix for a particular date and time. Therefore, the following equation
for right ascension of the ascending node is used:
Ω = Ω0 + Ω∆t (3.11)
The position vector in an orbit frame whose x-axis is pointed toward
the equator is:
rPQW =
r cos ur sin u
0
(3.12)
25

To rotate the position vector into the ECI frame:
rECI = R3(−Ω)R1(−i)rPQW (3.13)
where R3(−Ω) is a rotation about the third axis through an angle of −Ω and
R1 is a rotation about the first axis through an angle of −i.
3.1.3 GPS SV Velocity Equations
The ECI velocity of the GPS SV is the time derivative of the ECI
position given in (3.13), which can be expressed as:
vECI = M(Ω, i)rPQW + M(Ω, i)rPQW (3.14)
where M(Ω, i) = R3(−Ω)R1(−i). Taking the time derivative of (3.12), the
velocity vector in the perifocal plane becomes:
rPQW =
r cos u− ru sin ur sin u + ru cos u
0
(3.15)
where:
r = ae sin EE + δr
δr = 2ν(Crs cos 2u− Crc sin 2u)
u = ν + ˙δu
˙δu = 2ν(Cus cos 2u− Cuc sin 2u) (3.16)
The time derivatives of the eccentric and true anomalies are given by:
E =n
1− e cos E(3.17)
26

and:
ν =n√
1− e2
1 + e cos ν
1− e cos E(3.18)
The time derivative of M is given by:
M(Ω, i) = Ω
− sin Ω − cos i cos Ω sin i cos Ωcos Ω − cos i sin Ω sin i sin Ω
0 0 0
+ (di/dt + δi)
0 sin i sin Ω cos i sin Ω0 − sin i cos Ω − cos i cos Ω0 cos i − sin i
(3.19)
where:
δi = 2ν(Cis cos 2u− Cic sin 2u) (3.20)
3.2 GPS Measurement Equations
This section contains the equations for the GPS pseudorange and carrier
phase measurements. Detailed discussions of the GPS measurement equations
can be found in Hofmann-Wellenhof [21] and Ebinuma [13].
3.2.1 Pseudorange Measurement
Let tS be the reading on the satellite clock at the time the signal is sent
and tR be the reading on the receiver clock at the time the signal is received.
Both clocks are in error with respect to GPS system time, so that:
tR = tR(GPS) + ∆tR (3.21)
tS = tS(GPS) + ∆tS (3.22)
27
where tR(GPS) and tS(GPS) are the true GPS system times of receipt and
transmission, and ∆tR and ∆tS are the receiver and GPS satellite clock errors,
respectively.
The measured pseudorange is given by:
P (tR) = c(tR − tS) (3.23)
where c is the speed of light. Substituting (3.21) and (3.22) into (3.23) for the
following expression yields the pseudorange equation:
P (tR) = c(tR(GPS)− tS(GPS))− c(∆tR −∆tS) (3.24)
The geometric distance the signal travelled from transmission at the GPS
satellite to reception at the receiver is:
ρ(tR(GPS)) = c(tR(GPS)− tS(GPS)) (3.25)
However, the receiver provides the pseudorange measurement at time tR, not
at tR(GPS). Since the true GPS system time is unknown, the geometric
distance is linearized about the known receiver measured time using a Taylor
series, such that:
ρ(tR(GPS)) = ρ(tR −∆tR) ≈ ρ(tR)− ρ(tR)∆tR (3.26)
where second order and higher terms are ignored. Substituting (3.26) into
(3.24) yields the pseudorange measurement equation:
P (tR) ≈ ρ(tR) + (c− ρ(tR))∆tR − c∆tS (3.27)
28

3.2.2 Range Rate Equation
According to Ebinuma, the range rate contributes less than 1 mm to
the range measurement for a stationary receiver on the ground with a receiver
clock bias less than 1 msec. [13] Therefore, this small contribution is generally
neglected for stationary terrestrial applications. However, this is not true for
spacecraft in low Earth orbit.
The line of sight vector from the receiver to the jth GPS satellite is
defined as:
ρj = rGPSj(tS)− r(tR) (3.28)
The relative velocity between the receiver and the jth GPS SV can be defined
as:
vrelj = vGPSj(tS)− v(tR) (3.29)
where vGPSjis the velocity of the GPS SV and v is the velocity of the receiver.
Then, the following equation for the instantaneous range rate of the jth GPS
SV can be used: [13]
ρj (tR) =ρj · vrelj
ρj (tR) + ρj · (vGPSj(tS)/c)
(3.30)
3.2.3 Carrier Phase Measurement
The GPS carrier phase measurement is somewhat similar to the pseu-
dorange measurement except that instead of measuring the time it takes for
the signal to travel from the GPS satellite to the receiver, the receiver measures
29

the difference in the carrier phase between the receiver and the phase of a ref-
erence carrier. The measurement contains no information about the number
of whole cycles. This is referred to as the integer ambiguity. The scaled carrier
phase measurement equation differs from the pseudorange equation only by
the integer ambiguity N multiplied by the GPS wavelength λ:
λΦ(tR) ≈ ρ(tR) + (c− ρ(tR))∆tR − c∆tS + λN (3.31)
3.2.4 Satellite Motion During Signal Propagation
The true distance from the GPS satellite at the time of transmission
to the receiver at the time of reception ρ(tR) is a function of two time epochs.
Therefore, the motion of the GPS satellite during the signal travel time must
be accounted for. An iterative scheme is used to solve for the time of signal
transmission. The iteration is initialized by:
tS0 = tR (3.32)
The equation for the next estimate of the time of transmission is:
tSn+1 = tR +
∥∥rGPS(tSn)− r(tR)∥∥
c(3.33)
where rGPS(tSn) is the GPS SV position vector computed using (3.13) for the
nth approximation tSn and r(tR) is the receiver position vector at tR. The
iteration is continued until:
∣∣tSn+1 − tSn∣∣ < ε (3.34)
30
where ε is a small error tolerance. The true geometric distance for the jth
GPS SV can then be computed by:
ρj(tR) =∥∥rGPSj
(tS)− r(tR)∥∥ (3.35)
3.3 GPS Measurement Error Models
The GPS measurement error models for pseudorange, carrier phase,
and single difference carrier phase measurements are presented in this section.
3.3.1 Pseudorange and Carrier Phase
Ideally, the GPS receiver would measure the true range to the GPS SV,
however, the pseudorange and carrier phase measurements are biased and noisy
measurements. The errors included in the GPS measurement model include:
receiver and SV clock biases, GPS SV ephemeris errors, ionospheric delays,
multipath errors and random measurement noise. Therefore, the pseudorange
and carrier phase measurements models can be expressed as:
P (t) = ρ + [c− ρ] ∆tR − c∆tS + ∆URE + ∆iono + ∆mp + εpr (3.36)
λΦ(t) = ρ + [c− ρ] ∆tR − c∆tS + ∆URE + ∆iono + ∆mp + λN + εcp
where:
∆URE = user range error
∆iono = ionospheric delay range error
∆mp = multipath range error
31
εpr = pseudorange measurement error
εcp = carrier phase range measurement error
The user range error is caused by errors in the broadcast ephemerides
and GPS SV clock corrections. Tropospheric delay is not included because
both the chaser spacecraft and ISS are assumed to be above the troposphere.
Also, since Selective Availability (SA) was turned off on May 1, 2000, SA clock
dither and ephemeris errors are not included.
3.3.2 Single Difference Carrier Phase
If two spacecraft are close enough that the signal path from each GPS
SV is almost the same, the GPS SV related errors such as ionospheric delay,
GPS SV clock, and ephemeris errors are cancelled out when the difference
between measurements from the two spacecraft is taken. If simultaneous mea-
surements from the two spacecraft (denoted by the subscripts A and B) with
the same GPS SV exist, then the single difference carrier phase measurement
for the j th GPS SV can be defined by:
λΦjAB = ρj
AB + ρjA∆tA − ρj
B∆tB + c(∆tB −∆tA) + λN jAB + εj
AB (3.37)
where ∗jAB = ∗j
B − ∗jA. If the measurements are statistically independent, the
variance of the measurement noise is doubled when taking the difference of
two carrier phase measurements.
The measurements from both vehicles are assumed to be taken simul-
taneously and instantly received by the chaser vehicle. In the real world, the
32

d i r e c ts i g n a l
r e f l e c t e dr a y s
b l o c k e ds i g n a l
Figure 3.1: The ISS Blockage and Multipath Scenario
difference between the measurement times and the transmission delay would
have to be accounted for. One means of assuring that the measurements are
taken simultaneously would be to steer the receiver clocks to track GPS time.
3.4 ISS Blockage and Multipath Models
For spacecraft operating in the vicinity of the ISS, GPS signals can
be blocked or degraded by multipath signals being reflected off of the ISS as
shown in Figure 3.1.
3.4.1 ISS Signal Blockage Model
It has been hypothesized that the ISS will block GPS signals needed
by other spacecraft to navigate during rendezvous operations. To analyze this
33
X
Y
Z
I S S
G P S
C H A S E R
r G P S
r
r j
r I S S
r I S S
r G PS /
I S S
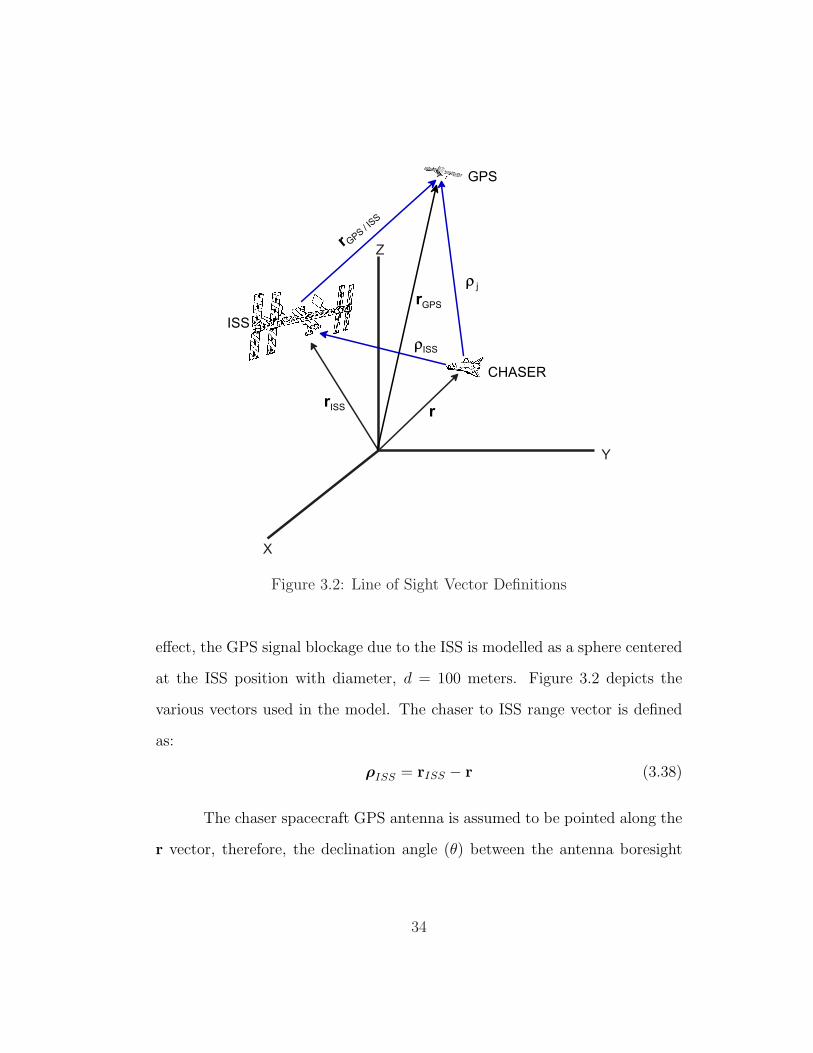
Figure 3.2: Line of Sight Vector Definitions
effect, the GPS signal blockage due to the ISS is modelled as a sphere centered
at the ISS position with diameter, d = 100 meters. Figure 3.2 depicts the
various vectors used in the model. The chaser to ISS range vector is defined
as:
ρISS = rISS − r (3.38)
The chaser spacecraft GPS antenna is assumed to be pointed along the
r vector, therefore, the declination angle (θ) between the antenna boresight
34

and the GPS line of sight vector can be found by:
cos θj =r · ρj
r ρj
(3.39)
where r = ‖r‖ and ρj = ‖ρj‖.
The region of GPS signal blockage is defined by a cone about the chaser
to ISS range vector. The central angle of the cone, γ, is determined by the
radius of the blockage sphere and the distance from the chaser to the ISS as
follows:
tan(γ) =d/2
ρISS
(3.40)
where ρISS = ‖ρISS‖.
The angle between the GPS line of sight vector and the chaser to ISS
range vector is found by:
cos χj =ρISS · ρj
ρISS ρj
(3.41)
If the angle χj is less than γ, the GPS signal would be within the
blockage cone and considered to be blocked. Additionally, any GPS signals
below a 10 minimum elevation angle from the horizonal plane, perpendicular
to the antenna boresight vector, are also considered to be blocked. A side view
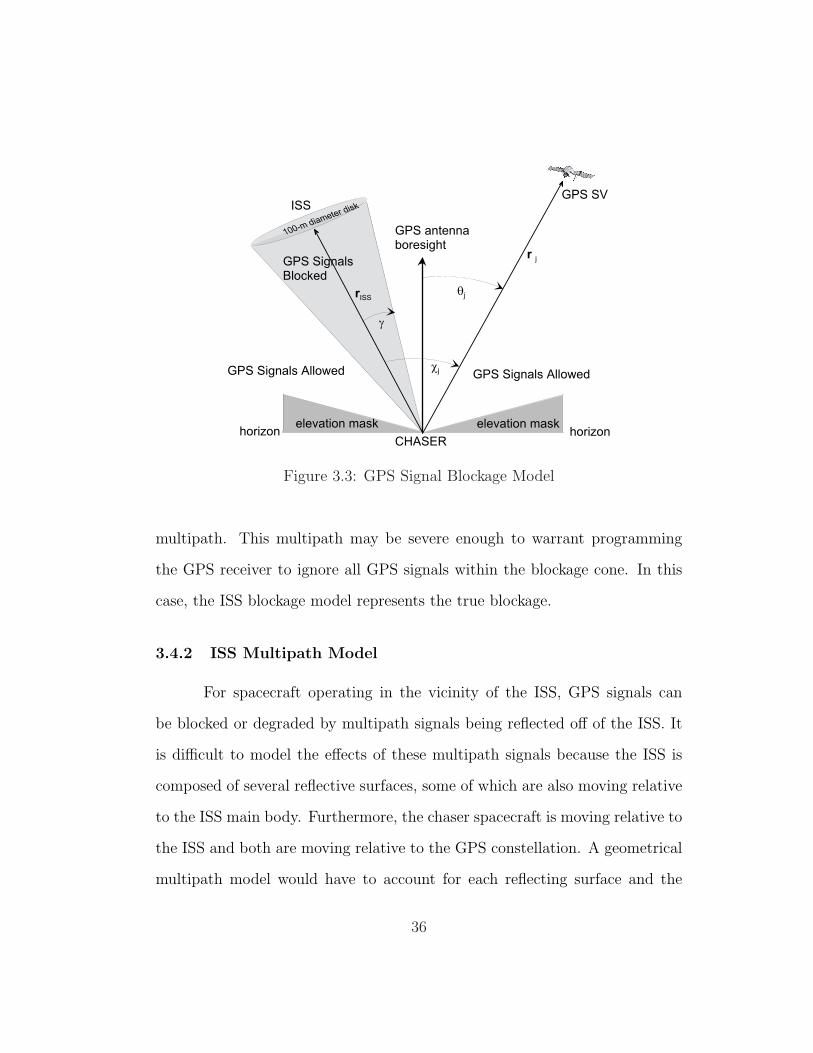
of the GPS signal blockage model is shown in Figure 3.3. The shaded areas
represent the regions where the GPS signals are blocked.
While the ISS is not actually a sphere and GPS signals will be received
from within the sphere, it is likely that those signals will be corrupted by
35
G P S a n t e n n ab o r e s i g h t
h o r i z o n h o r i z o ne l e v a t i o n m a s ke l e v a t i o n m a s k
G P S S i g n a l s A l l o w e dG P S S i g n a l s A l l o w e d
G P S S V
q j
G P S S i g n a l sB l o c k e d
r j
r I S S
g
c j
C H A S E R
I S S
Figure 3.3: GPS Signal Blockage Model
multipath. This multipath may be severe enough to warrant programming
the GPS receiver to ignore all GPS signals within the blockage cone. In this
case, the ISS blockage model represents the true blockage.
3.4.2 ISS Multipath Model
For spacecraft operating in the vicinity of the ISS, GPS signals can
be blocked or degraded by multipath signals being reflected off of the ISS. It
is difficult to model the effects of these multipath signals because the ISS is
composed of several reflective surfaces, some of which are also moving relative
to the ISS main body. Furthermore, the chaser spacecraft is moving relative to
the ISS and both are moving relative to the GPS constellation. A geometrical
multipath model would have to account for each reflecting surface and the
36

relative motion between the ISS, chaser spacecraft and GPS satellites. This
would be computationally intensive and not practical for some applications,
such as an integrated GPS/INS navigation simulation of a rendezvous scenario.
Therefore, a statistical multipath model was selected instead of a geometrical
multipath model.
The following assumptions are made in formulating this model:
1. If a GPS signal is not blocked by the ISS, it is subject to multipath.
2. For each GPS signal that is not blocked by the ISS, many reflections are
caused and there is no single dominant reflector.
3. The phases of the reflections are uniformly distributed over the angle [0,
2π). The rationale for this assumption is explained later in this chapter.
4. The relative velocity between the chaser spacecraft and the ISS is small,
so that there is no relative Doppler effect between the direct and reflected
signals.
According to Comp, an electromagnetic signal may reach an antenna by
a single direct path or indirectly through one or more reflected paths. Because
of the extra path length they travel, multipath signals usually arrive at the
antenna with a delay relative to the direct signal. For GPS carrier phase
measurements, multipath signals combine with the direct signal to distort the
received phase.[11] Assuming that there are multiple reflections, each reflected
path has an associated propagation delay and attenuation factor. Both the
37

propagation delays and attenuation factors are time varying due to the relative
motion and geometry of the vehicles.
Consider the transmission of an unmodulated carrier at frequency fc.
The transmitted signal can be expressed as:
x (t) = A0ej(2πfct) (3.42)
The multipath channel consists of multiple paths or rays that have real
positive gains βk, propagation delays τk and phase shifts θk, where k is the path
index and in principle ranges from 0 to ∞. The complex, low-pass channel
impulse response is given as:[35]
h (t) =∞∑
k=0
βk ejθkδ (t− τk) (3.43)
where δ (·) is the Dirac delta function. The composite received signal is the
time convolution of x (t)and h (t) and can be represented as:[35]
rc (t) =∞∑
k=0
A0 βk ej2π fc(t−τk)+θk (3.44)
If the direct path term is separated out and the range of k is limited to
a finite number N of multipath rays, the composite received signal becomes:
rc (t) = A0 β0 ej2π fct +N∑
k=1
A0 βk ej2π fc(t−τk)+θk (3.45)
If the direct signal phase is defined as φd = 2πfct and the multipath
relative phase shift of the kth ray is defined as ψk = 2πfcτk + θk, then the
38
composite received signal can be expressed as:
rc (t) = A0 β0 ej φd +N∑
k=1
A0 βk ej(φd+ψk) (3.46)
3.4.3 GPS Carrier Phase Measurement Errors
The error in the carrier phase measurement, δφ, due to multipath can
is given by:[1]
tan δφ =
N∑k=1
A0 βk sin ψk
A0 β0 +N∑
k=1
A0 βk cos ψk
(3.47)
where A0 represents the amplitude of the signal transmitted by the GPS satel-
lite. Factoring out A0 leaves:
tan δφ =
N∑k=1
βk sin ψk
β0 +N∑
k=1
βk cos ψk
(3.48)
3.4.4 GPS C/A Code Measurement Errors
The error due to multipath in GPS C/A code measurements for a non-
coherent GPS receiver has been derived by Braasch [4]. An approximation of
the code correlation function is:
R(τ) =
1− |τ |
T|τ | ≤ T
0 |τ | > T(3.49)
where T is the PRN code bit period. The normalized form of the discriminator
39

function with a single multipath ray is given by:[4]
D(τ) = R2(τ + τd)−R2(τ − τd)+
α2[R2(τ + τd + τm)−R2(τ − τd + τm)]+
2α cos(ψm)[R(τ + τd)R(τ + τd + τm)−
R(τ − τd)R(τ − τd + τm)] (3.50)
where τ is the delay lock loop (DLL) tracking error, α is the multipath relative
amplitude, τm is the multipath relative time delay and ψm is the multipath
relative phase angle. The τ corresponding to the zero-crossing of the discrim-
inator function is the DLL tracking error caused by multipath, which is equal
in magnitude but opposite in sign of the ranging error due to multipath.
Mora-Castro, et al, extended this equation to include the effects of
multiple multipath rays. In this case, the discriminator function is given by:[31]
D(τ) = R2(τ + τd)−R2(τ − τd)
+ 2N∑
k=1
αk cos(ψk)[R(τ + τd)R(τ + τd + τk)−R(τ − τd)R(τ − τd + τk)]
+N∑
k=1
N∑
l=1
αkαl cos(ψk−ψl)[R(τ+τd+τk)R(τ+τd+τl)−R(τ−τd+τk)R(τ−τd+τl)]
(3.51)
where:
αk =βk
β0
(3.52)
40
3.4.4.1 Conjectures
Some conjectures about the nature of multipath signals have been used
because there is limited spaceflight experiment data available. These conjec-
tures are based on terrestrial multipath models and measurements. Conjec-
tures about the relative phase shifts, relative amplitudes, the multipath power
delay profile and relative time delays are described in this section.
Phase Shifts. The multipath relative phase angle ψk changes by 2π when the
path length changes by one wavelength. For the GPS L1 signal, fc =1575.42
MHz, the wavelength is about 19 cm. This implies that small motions of the
reflector or receiver can cause ψk to change by 2π. The delays associated
with different paths are expected to change at different rates and in an unpre-
dictable or random manner. If one considers a fixed transmitter and a mobile
receiver, and imagines an ensemble of receiver positions spread over hundreds
or thousands of wavelengths, then the geometry of a single path with delay
τk will lead to a uniform distribution of phase for that path, while the ge-
ometrical relationship between separate paths with different delays will lead
to a uniform joint distribution of pairs of phases, thus the phases would be
independent. Therefore, the phase angles will be assumed to be statistically
independent random variables with a uniform distribution over the range [0,
2π). [35]
Amplitudes. The received multipath signals can be modelled as random
processes. When there are a large number of paths (in practice, greater than
6), the central limit theorem may be applied so that the received signal may
41
be modelled as a complex-valued Gaussian random process.[35]
The received signal can be broken down into in-phase and quadrature
components, I(t) and Q(t), which are independent Gaussian processes. This
means that they are completely characterized by their mean value and auto-
correlation function. I(t) and Q(t) have equal variance σ2 equal to the mean
square power. The total amplitude of the signal is the square root of the sum
of the squares of I(t) and Q(t), which are Gaussian. This leads to the con-
jecture that the amplitudes are Rayleigh distributed. Therefore, the βk’s are
Rayleigh distributed such that:
p(β2
k
)=
1
β2k
e−
(β2
k/β2k
)
(3.53)
where β2k= the average power gain at τk.[38]
Power Delay Profile. The multipath power-delay profile for a given en-
vironment is the expected power received as a function of delay. Numerous
measurements of the multipath power-delay profile for various environments
have been made, such as those by Van Rees[44] and Belloul[2]. Based on these
studies, a general model of the multipath average power delay profile can be
given as:[43]
P (τ) = P0 e−τ/τ (3.54)
where τ is the mean excess delay of the multipath reflections and P0 is the
total multipath power. The total multipath power is estimated by using the
42

bi-static radar equation:
P0 =ARCS λ2Gmp
r Pt Gt
(4π)3 ρISS2 r2
GPS/ISS
(3.55)
where ρISS is the distance from the chaser to the ISS, rGPS/ISS is the distance
from the ISS to the GPS satellite, ARCS is the radar cross sectional area of
the ISS, λ is the wavelength, Gmpr is the antenna gain of the receiver in the
direction of the multipath, and Pt Gt is the effective isotropic radiated power
from the GPS satellite.
The average power in each multipath signal is:
Pk =1
2A2
0 β2k (3.56)
Equating this with equation (3.54) and solving for β2k leads to:
β2k =
2P0
A20
e−τ/τ (3.57)
Substituting (3.55) into (3.57) and recognizing that A20 = 2Pt Gt results in the
following expression:
β2k (τ) =
ARCS λ2Gmpr
(4π)3 ρISS2 r2
GPS/ISS
e−τ/τ (3.58)
Since the multipath rays are being reflected off of the ISS, the mean excess
delay is approximated by:
τ =ρISS
c(3.59)
43

where c is the speed of light. The power of the direct signal is estimated by
using the Friis equation:
Pdirect =1
2A2
0 β20 =
λ2Gdirectr Pt Gt
(4πρj)2 (3.60)
Since A20 = 2Pt Gt,
β20 =
λ2Gdirectr(
4πrGPS/STS
)2 (3.61)
If a cardioid pattern antenna is used, then:
Gdirectr = 1 + cos θdirect (3.62)
where θdirect is the angle between the direct line of sight vector and the antenna
boresight vector. Substituting (3.62) into (3.61) leads to:
β0 =
√λ2 (1 + cos θdirect)
(4πρj)2 (3.63)
Delay Times. The mean excess delay and RMS delay spread are commonly
used to characterize multipath time delays. The parameters are determined
from a multipath power delay profile. The mean excess delay is the first
moment of the power delay profile and is defined to be:[36]
τ =
∑k
β2k τk
∑k
β2k
(3.64)
Turin, et al, proposed that the delay times form a Poisson sequence.[40]
The probability distribution of time delays is given by:[25]
p (τk) =1
τe−
τkτ (3.65)
44
3.4.4.2 Multipath Model Algorithm
This section describes how the multipath error for each GPS carrier
phase measurement is computed for the simulation. The algorithm is:
1. For each simulation time and each GPS satellite, compute: r, rGPS/ISS
and θdirect.
2. Compute β0 using (3.63) and τ using (3.59).
3. Given N , obtain the τk’s from the Poisson distribution given in (3.65).
4. For each τk:
• Given ARCS, compute β2k using (3.58).
• Obtain the βk’s from the Rayleigh distribution given in (3.53).
• Obtain the ψk’s from a uniform distribution over [0, 2π).
• Construct βk sin ψk and βk cos ψk
5. Determine the carrier phase range error from (3.48).
6. Determine the code range error from (3.51)
A flowchart of the combined ISS blockage and multipath models is
shown in Figure 3.11 which is located at the end of the chapter.
45

3.5 ISS and Spacecraft Orbit Models
The orbit models used in the ISS blockage and multipath studies are
presented in this section. The ISS orbit model was an unperturbed two-body
orbit with orbit elements presented in Table 3.2. To determine the GPS signal
blockage, the chaser was positioned so that it remained at a constant distance
∆r directly below the ISS along the radius vector from the center of the earth
to the ISS. ∆r was varied for each simulation run to determine the GPS signal
blockage and multipath effects at different distances below the ISS. While this
does not represent a rendezvous scenario, it allowed a large number of samples
to be collected over the course of the simulation while maintaining the same
geometry relative to the ISS. Another reason for placing the chaser at various
distances below the ISS is to evaluate the blockage at various points during
an R-bar approach in which the chaser approaches the ISS along the Earth to
ISS radius vector.
Table 3.2: ISS Orbit Elements.
a = 6678.0 km
e = 0.005
i = 56.0
3.6 ISS Blockage Study Results
The results from the computer simulation developed to study the GPS
signal blockage due to the ISS are presented in this section.
46
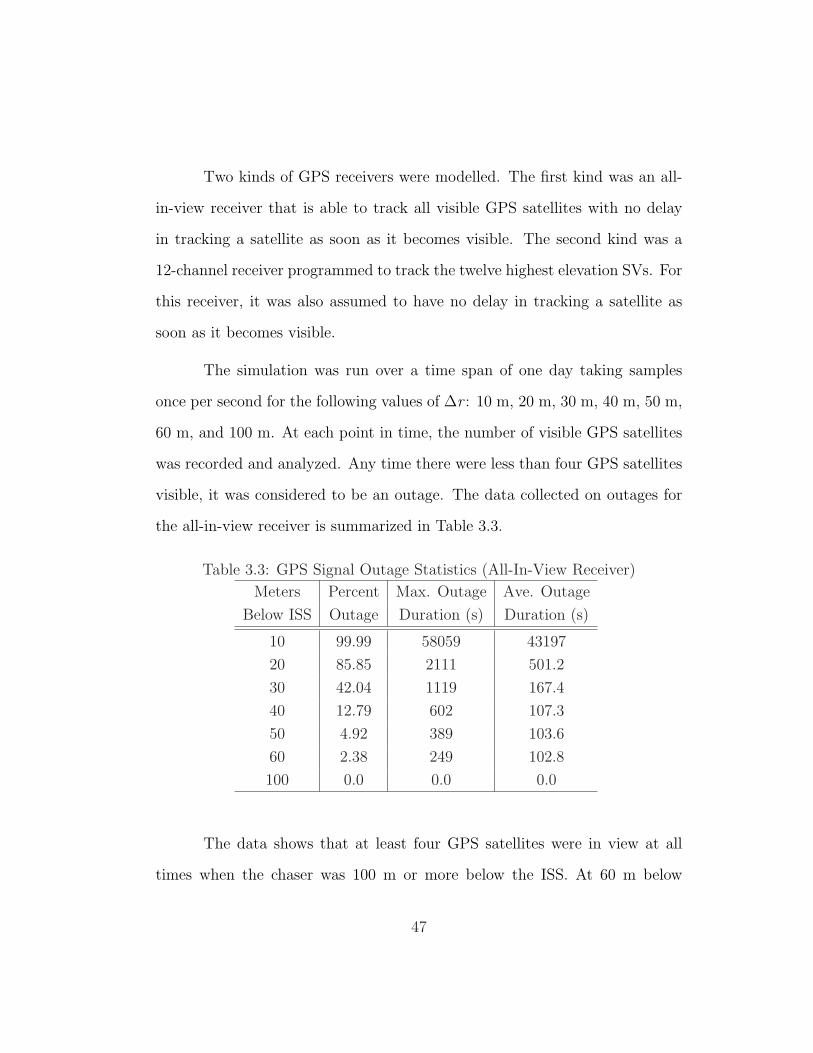
Two kinds of GPS receivers were modelled. The first kind was an all-
in-view receiver that is able to track all visible GPS satellites with no delay
in tracking a satellite as soon as it becomes visible. The second kind was a
12-channel receiver programmed to track the twelve highest elevation SVs. For
this receiver, it was also assumed to have no delay in tracking a satellite as
soon as it becomes visible.
The simulation was run over a time span of one day taking samples
once per second for the following values of ∆r : 10 m, 20 m, 30 m, 40 m, 50 m,
60 m, and 100 m. At each point in time, the number of visible GPS satellites
was recorded and analyzed. Any time there were less than four GPS satellites
visible, it was considered to be an outage. The data collected on outages for
the all-in-view receiver is summarized in Table 3.3.
Table 3.3: GPS Signal Outage Statistics (All-In-View Receiver)
Meters Percent Max. Outage Ave. Outage
Below ISS Outage Duration (s) Duration (s)
10 99.99 58059 43197
20 85.85 2111 501.2
30 42.04 1119 167.4
40 12.79 602 107.3
50 4.92 389 103.6
60 2.38 249 102.8
100 0.0 0.0 0.0
The data shows that at least four GPS satellites were in view at all
times when the chaser was 100 m or more below the ISS. At 60 m below
47
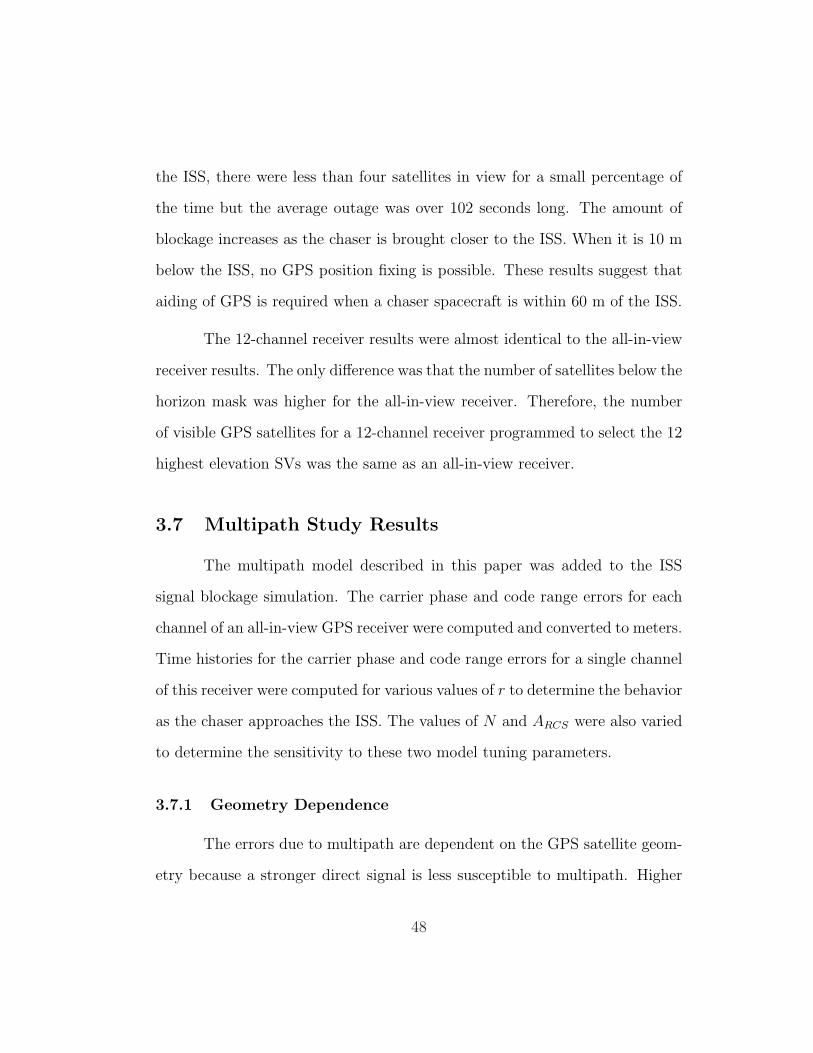
the ISS, there were less than four satellites in view for a small percentage of
the time but the average outage was over 102 seconds long. The amount of
blockage increases as the chaser is brought closer to the ISS. When it is 10 m
below the ISS, no GPS position fixing is possible. These results suggest that
aiding of GPS is required when a chaser spacecraft is within 60 m of the ISS.
The 12-channel receiver results were almost identical to the all-in-view
receiver results. The only difference was that the number of satellites below the
horizon mask was higher for the all-in-view receiver. Therefore, the number
of visible GPS satellites for a 12-channel receiver programmed to select the 12
highest elevation SVs was the same as an all-in-view receiver.
3.7 Multipath Study Results
The multipath model described in this paper was added to the ISS
signal blockage simulation. The carrier phase and code range errors for each
channel of an all-in-view GPS receiver were computed and converted to meters.
Time histories for the carrier phase and code range errors for a single channel
of this receiver were computed for various values of r to determine the behavior
as the chaser approaches the ISS. The values of N and ARCS were also varied
to determine the sensitivity to these two model tuning parameters.
3.7.1 Geometry Dependence
The errors due to multipath are dependent on the GPS satellite geom-
etry because a stronger direct signal is less susceptible to multipath. Higher
48
elevation signals are stronger because the receiving antenna gain is higher and
the GPS satellite is closer to the receiver. Both of these effects are accounted
for in equation (3.63).
The time history of carrier phase and C/A code range errors and the
corresponding direct signal elevation angles are shown in 3.4. As expected, the
magnitude of the range errors increases as the direct signal elevation decrease.
0 500 1000 1500 2000 2500 3000 3500−0.01
−0.005
0
0.005
0.01
rang
e er
ror
[m]
Carrier Phase Error, Chaser 100 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−20
−10
0
10
20
rang
e er
ror
[m]
C/A Code Error, Chaser 100 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 350010
20
30
40
50
60
70
time [s]
elev
atio
n [d
eg]
Elevation Angle, Chaser 100 meters below ISS, N = 5, Arcs = 500 m2
Figure 3.4: Range Errors and Direct Signal Elevation Angles
3.7.2 Distance from ISS
It is expected that the range errors due to multipath will increase as
the spacecraft approaches the ISS. This effect is evident in the time histories
of carrier phase ranges errors at 50 m, 100 m and 200 m below the ISS shown
in Figure 3.5 and for C/A code range errors in Figure 3.6.
49

0 500 1000 1500 2000 2500 3000 3500−0.02
−0.01
0
0.01
0.02
rang
e er
ror
[m]
Carrier Phase Error, Chaser 50 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−0.02
−0.01
0
0.01
0.02
rang
e er
ror
[m]
Carrier Phaser Error, Chaser 100 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−0.02
−0.01
0
0.01
0.02
time [s]
rang
e er
ror
[m]
Carrier Phase Error, Chaser 200 meters below ISS, N = 5, Arcs = 500 m2
Figure 3.5: Carrier Phase Range Errors at 50m, 100 m and 200 m Below theISS
3.7.3 Number of Multipath Rays
One of the model parameters is the number of multipath rays per GPS
signal. The number of reflected rays would be expected to increase as more
modules, solar arrays and thermal radiators are added to the ISS. It is expected
that the range errors due to multipath will increase as the number of multipath
rays (N) increases. This trend is seen in the time histories of carrier phase
range errors at 100 m below the ISS shown in Figure 3.7 and in C/A code
range errors in Figure 3.8.
50

0 500 1000 1500 2000 2500 3000 3500−30
−20
−10
0
10
20
30
rang
e er
ror
[m]
C/A Code Error, Chaser 50 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−30
−20
−10
0
10
20
30
rang
e er
ror
[m]
C/A Code Error, Chaser 100 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−30
−20
−10
0
10
20
30
time [s]
rang
e er
ror
[m]
C/A Code Error, Chaser 200 meters below ISS, N = 20, Arcs = 500 m2
Figure 3.6: C/A Code Range Errors at 50m, 100 m and 200 m Below the ISS
3.7.4 ISS Radar Cross-sectional Area
The ISS radar cross-sectional area is another model parameter. It acts
as a scaling factor on the total received multipath power and can be used to
account for the reflective properties and size of the various ISS structures. The
ISS radar cross-sectional area would be expected to increase as more modules,
solar arrays and thermal radiators are added to the ISS. It is expected that
the range errors due to multipath will increase as the ISS radar cross-sectional
area (ARCS) increases. This effect is shown in the time histories of carrier
phase range errors at 100 m below the ISS in Figure 3.9 and in C/A code
range errors in Figure 3.10.
51
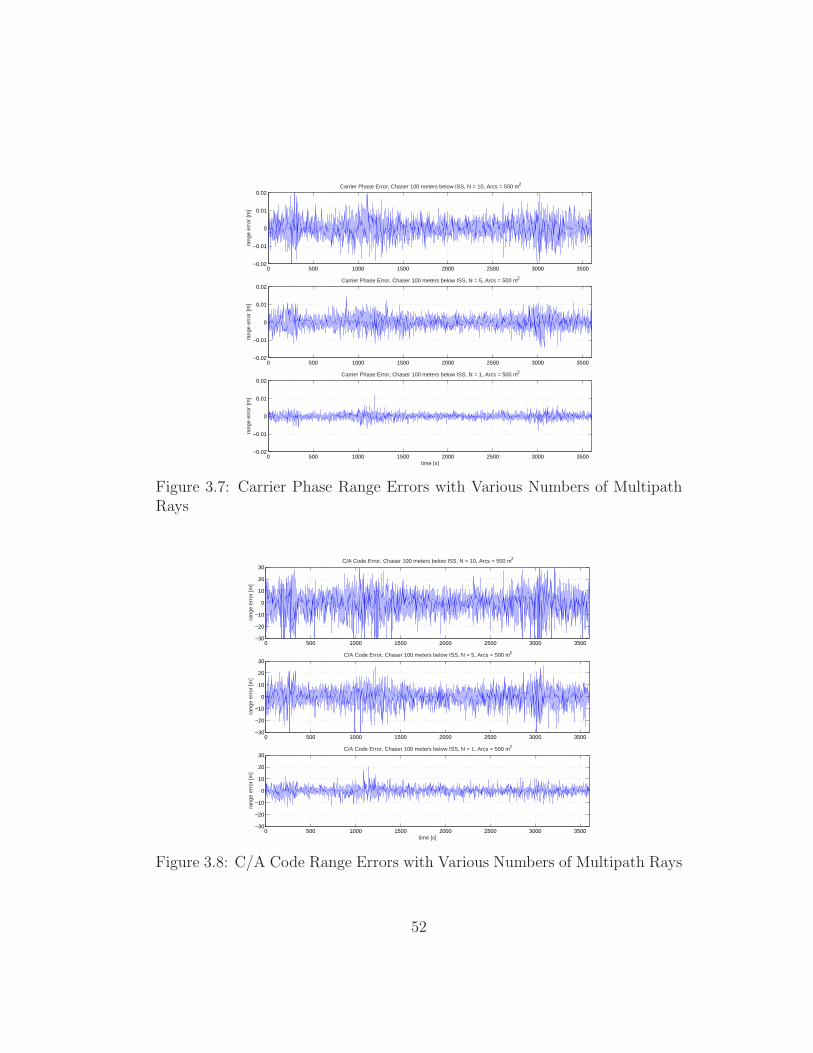
0 500 1000 1500 2000 2500 3000 3500−0.02
−0.01
0
0.01
0.02
rang
e er
ror
[m]
Carrier Phase Error, Chaser 100 meters below ISS, N = 10, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−0.02
−0.01
0
0.01
0.02
rang
e er
ror
[m]
Carrier Phase Error, Chaser 100 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−0.02
−0.01
0
0.01
0.02
time [s]
rang
e er
ror
[m]
Carrier Phase Error, Chaser 100 meters below ISS, N = 1, Arcs = 500 m2
Figure 3.7: Carrier Phase Range Errors with Various Numbers of MultipathRays
0 500 1000 1500 2000 2500 3000 3500−30
−20
−10
0
10
20
30
rang
e er
ror
[m]
C/A Code Error, Chaser 100 meters below ISS, N = 10, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−30
−20
−10
0
10
20
30
rang
e er
ror
[m]
C/A Code Error, Chaser 100 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−30
−20
−10
0
10
20
30
time [s]
rang
e er
ror
[m]
C/A Code Error, Chaser 100 meters below ISS, N = 1, Arcs = 500 m2
Figure 3.8: C/A Code Range Errors with Various Numbers of Multipath Rays
52
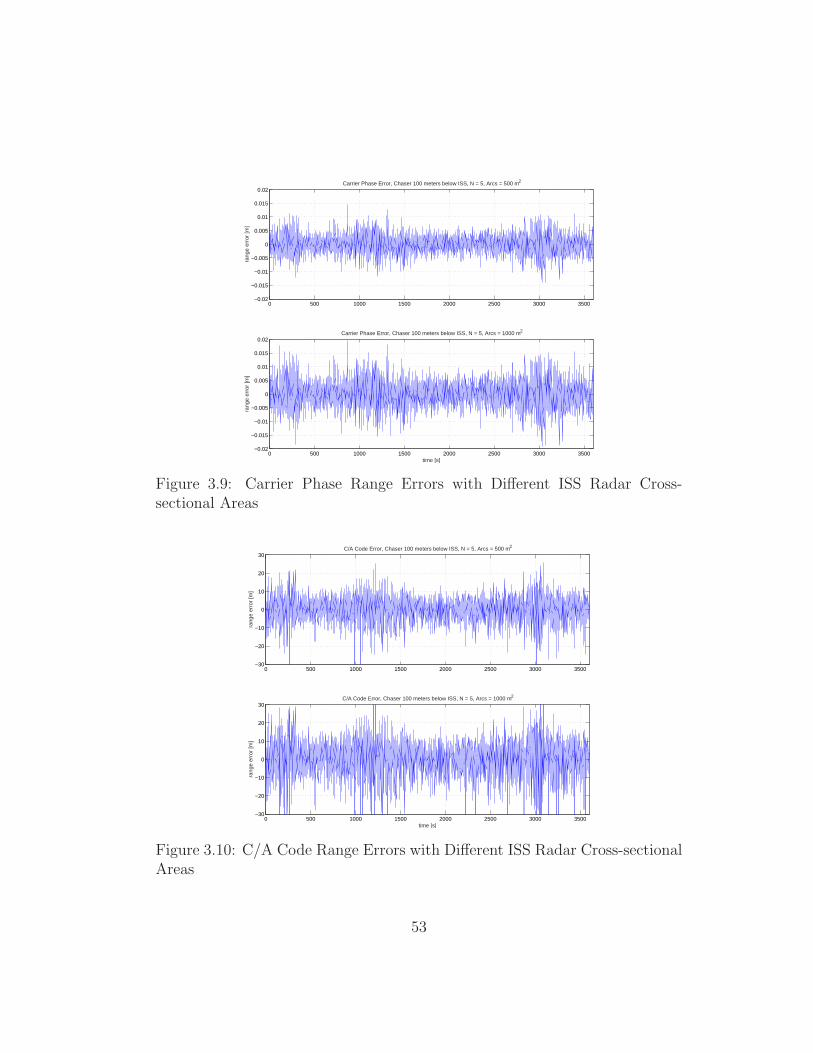
0 500 1000 1500 2000 2500 3000 3500−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
rang
e er
ror
[m]
Carrier Phase Error, Chaser 100 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
time [s]
rang
e er
ror
[m]
Carrier Phase Error, Chaser 100 meters below ISS, N = 5, Arcs = 1000 m2
Figure 3.9: Carrier Phase Range Errors with Different ISS Radar Cross-sectional Areas
0 500 1000 1500 2000 2500 3000 3500−30
−20
−10
0
10
20
30
rang
e er
ror
[m]
C/A Code Error, Chaser 100 meters below ISS, N = 5, Arcs = 500 m2
0 500 1000 1500 2000 2500 3000 3500−30
−20
−10
0
10
20
30
time [s]
rang
e er
ror
[m]
C/A Code Error, Chaser 100 meters below ISS, N = 5, Arcs = 1000 m2
Figure 3.10: C/A Code Range Errors with Different ISS Radar Cross-sectionalAreas
53
3.7.5 Model Tuning and Validation
The following parameters can be used to tune the multipath model: the
ISS radar cross-sectional area, the number of multipath reflections per direct
signal, and the direct signal antenna gain.
As more modules, solar arrays and thermal radiators are added to the
ISS, its radar cross-sectional area and the number of multipath reflections are
expected to increase. Therefore, the multipath model can readily adjust to
the changing configuration of the ISS over time.
After consulting with engineers at the NASA Johnson Space Center, it
was determined that the data needed to validate the ISS blockage and mul-
tipath models does not currently exist. Therefore, the values of the tuning
parameters used in the multipath study were chosen based on anecdotal expe-
rience and not on empirical data.
Since engineers are currently designing autonomous rendezvous and
docking systems for the ISS using GPS, it is recommended that a flight ex-
periment to determine the levels of GPS signal blockage and multipath for
pseudorange and carrier phase measurements near the ISS be flown as soon as
possible.
54
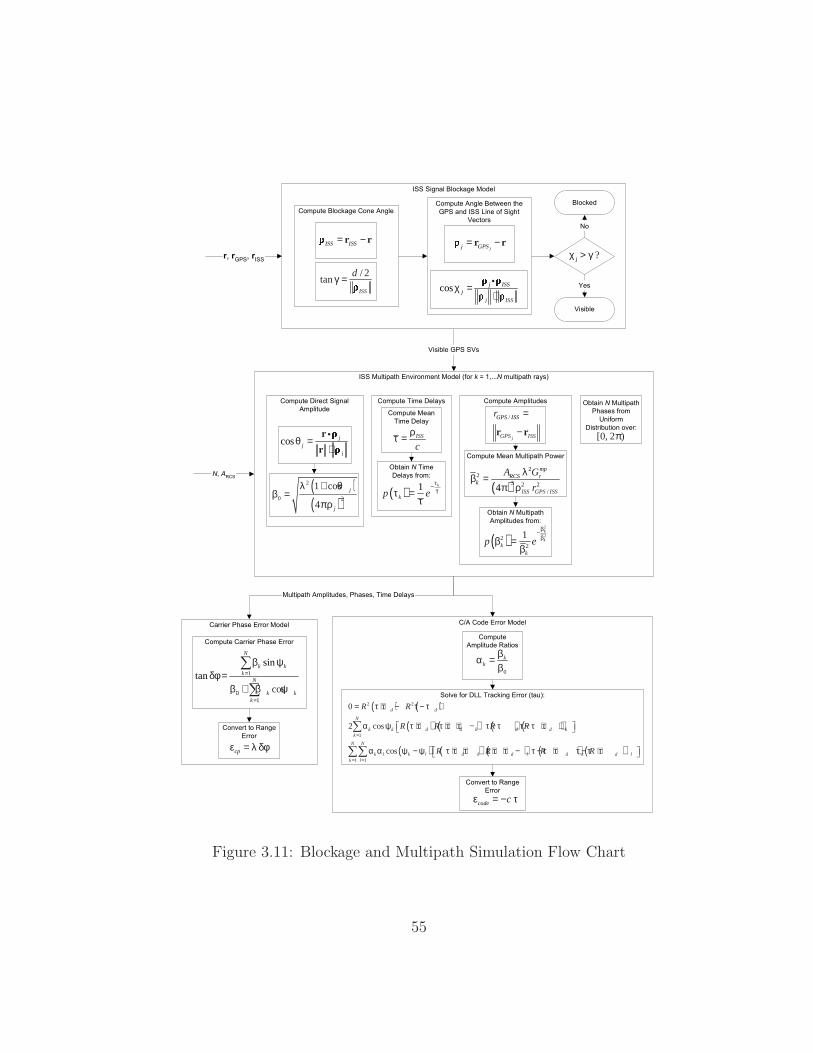
!
" #
[0, 2 )π
$%
/
j
GPS ISS
GPS ISS
r =
−r r
$ &
( )2
23 2 2
/4
mpRCS r
k
ISS GPS ISS
A G
r
λβ =π ρ
%#
( )2
222
1 k
kk
k
p eβ−ββ =
β
$"'(
%
cos jj
j
θ =⋅
r
r
( )( )
2
0 2
1 cos
4
j
j
λ + θβ =
πρ
$)"
$
)"
ISS
c
ρτ =
)
" #
( ) 1 k
kp eτ−ττ =
τ
* *
( +', (
j ?χ > γ
*
+',
-
.
$+', ($%(
ISS ISS= − r r
/ 2tan
ISS
dγ =
$%(+&
/(
*'
jj GPS= − r r
cos j ISSj
j ISS
χ =⋅
0$
$
$0 (
cpε = λ δφ
$$
1
1
sintan
cos
N
k kk
N
k kk
=
0=
β ψδφ =
β + β ψ
% )"
$1%$
$
%0
0
kk
βα =β
"//) ',( #
( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
2 2
1
1 1
0
2 cos
cos
d d
N
k k d d k d d kk
N N
k l k l d k d l d k d lk l
R R
R R R R
R R R R
=
= =
= τ + τ − τ − τ +
α ψ τ + τ τ + τ + τ − τ − τ τ − τ + τ +
α α ψ − ψ τ + τ + τ τ + τ + τ − τ − τ + τ τ − τ + τ
$0 (
code cε = − τ
Figure 3.11: Blockage and Multipath Simulation Flow Chart
55
Chapter 4
Inertial Navigation
4.1 Fundamentals of Inertial Navigation
An INS processes measurements from sensors that sense specific forces
and inertial angular velocity. A specific force is the force per unit mass of
any non-gravitational force. A correctly initialized INS is able to determine
position and velocity without the use of external sensors or measurements. An
INS performs the following functions: [6]
• Instruments a reference frame.
• Measures specific forces.
• Models the gravitational field.
• Integrates the specific force data to obtain position and velocity.
The fundamental equation of inertial navigation comes directly from
Newton’s Second Law:
d2r
dt2= CI
BfB + g (4.1)
where r is the inertial position vector, CIB is the transformation from the INS
body frame to the inertial reference frame, fB is the total specific force vector
56
measured in the body frame, and g is the acceleration due to gravity. This
equation is integrated once to obtain velocity and a second time to obtain
position, both relative to the inertial reference frame. Accelerometers measure
the specific forces. Gyroscopes (gyros) measure the angular motion of the INS
body with respect to inertial space in order to compute CIB. An INS uses an
internal gravity model to estimate the acceleration due to gravity based on its
current estimate of position.
Inertial navigation systems can be classified into two categories: stable
platform or strapdown. Stable platform systems attempt to keep the physical
platform containing the accelerometers and gyros in a fixed orientation with
respect to the navigation frame.
In a strapdown system, the sensors are attached to the case of the INS
and remain fixed with respect to the body of the vehicle. The INS computer
uses the gyro measurements to keep track of the body’s attitude relative to
the navigation frame.
Sensors other than gyros could be used to provide attitude informa-
tion, however, an INS, by definition, uses gyroscopes because they are inertial
sensors that do not require external input.
Before the early 1980’s, gyroscopes could not measure high angular
rates and computers could not perform the strapdown computations fast enough
for strapdown systems to be practical. However, by the late 1980’s, strapdown
systems became prevalent and stable platform systems are much less common
57

today. Therefore, stable platform systems will not be discussed any further
and a strapdown system will be assumed.
4.2 INS Error Sources
The major sources of error in an INS include initialization errors, sys-
tem alignment errors, sensor errors, gravity model errors, quantization, and
computational errors.
4.2.1 Initialization Errors
An INS integrates sensed accelerations to propagate initial estimates of
position and velocity. Imperfections in the initial estimates will cause position
and velocity errors.
4.2.2 System Alignment Errors
In order to properly resolve the components of sensed acceleration in
the navigation frame, an INS must have knowledge of the orientation of the
accelerometers with respect to the navigation frame. Typically an INS will
perform an alignment process to determine the initial orientation. Errors in
the initial alignment will cause position and velocity errors.
4.2.3 Sensor Errors
Despite sensor calibration, it is not uncommon for sensor characteris-
tics to change over time and between turn-ons. These changes cannot all be
58
compensated for and result in position and velocity errors. Sources of gyro
and accelerometer errors include input axis misalignments, scale factor errors,
non-linearities, bias instability from turn-on to turn-on and bias drift after
turn-on.
4.2.3.1 Gyro Measurement Noise
Gyro measurement noise is caused by random errors in the angular
velocity measurement. This is usually the predominant error source in ring
laser and fiber optic gyros but is usually not included in error models for most
mechanical gyros. This error is modelled as zero-mean, white Gaussian noise
and causes angular random walk.
4.2.3.2 Gyro Drift (Bias)
There are two components in gyro drift. There is the gyro drift that
varies from turn-on to turn-on (also referred to as bias repeatability or bias
stability). This is modelled as a Gaussian random constant. The second part is
bias drift or variability after turn-on (sometimes referred to as in-run stability)
and is usually modelled as a random walk or first-order Markov process.
4.2.3.3 Gyro Scale Factor
Gyro scale factor error is an error in the calibrated scale factor of the
gyro. This is modelled as a Gaussian random constant for each axis.
59
4.2.3.4 Gyro Misalignments
Gyro misalignments are errors in the alignment of the gyro input (or
sensitive) axes from the orthogonal platform axes. This is modelled as a pair
of Gaussian random constants for each gyro.
4.2.3.5 Gyro G-Sensitivity
Mechanical gyros may exhibit drifts that are linear and quadratic func-
tions of acceleration. These drifts are usually not associated with ring laser or
fiber optic gyros and are modelled as Gaussian random constants.
4.2.3.6 Accelerometer Measurement Noise
Accelerometer measurement noise is caused by random errors in the
specific force measurement. This is modelled as white Gaussian noise and
causes velocity random walk.
4.2.3.7 Accelerometer Bias
There are two components in accelerometer bias error. There is the bias
repeatability that varies from turn-on to turn-on (also sometimes referred to
as bias stability). This is modelled as a random constant. The second part is
bias drift or variability after turn-on (sometimes referred to as in-run stability)
and is usually modelled as a random walk or first-order Markov process.
60
4.2.3.8 Accelerometer Scale Factor
Accelerometer scale factor error is an error in the calibrated scale factor
of the accelerometer. This is modelled as a Gaussian random constant for each
axis.
4.2.3.9 Accelerometer Misalignments
Accelerometer misalignments are errors in the alignment of the ac-
celerometer input (or sensitive) axes from the orthogonal platform axes. This
is modelled as a pair of Gaussian random constants for each accelerometer.
4.2.3.10 Accelerometer Non-linearity
Accelerometers may exhibit errors that are quadratic functions of ac-
celeration. This error source is modelled by six Gaussian random constants
for each axis.
4.2.4 Gravity Model Errors
The Earth’s gravity field cannot be modelled perfectly and so an INS
designer must choose a gravity field model that meets the accuracy require-
ments of the particular application.
4.2.5 Quantization and Computational Errors
The navigation equations are typically performed by a digital computer
where quantization, overflow and numeric errors can occur.
61

4.3 INS Error Model
The INS error model has a number of uses. During INS testing, optimal
estimation theory can be applied to process all of the available test data to
obtain the best possible estimates of the sources of error of the INS under
test. In an integrated GPS/INS, an error state space (indirect) Kalman filter
uses the INS error model in the propagation step to predict the errors at the
next measurement time. The INS error model is also used in the design of
the GPS/INS Kalman filter to determine which error sources are important to
include in the filter and which ones can be ignored.
The navigation errors committed by an inertial navigation system can
be modelled by a set of first order, linear ordinary differential equations. These
equations are derived using linear perturbation theory and allow the use of
optimal estimation theory to estimate and remove the errors.
4.3.1 Derivation of INS Error Model
The derivation of the error model for a strapdown INS using quater-
nions presented in this section is based on Friedland [16] and provides some of
the missing steps. The first step in deriving the INS error model is to define
the state vector x as:
x =
rvq
(4.2)
where r is the position vector, v is the velocity vector and q is the quaternion
representing the body to inertial reference frame transformation. The system
62

will be driven by the angular velocity sensed by the gyros and specific forces
sensed by the accelerometers, so the forcing function vector u is defined as
follows:
u =
[ωf
](4.3)
Using these definitions and equations (4.1) and (5.77), the fundamental
equations of inertial navigation can be expressed in first order form as:
x =
rvq
=
v (t)CI
B (q) f (t) + g (r)Ω (ω) q (t)
= Γ (x, u, t) (4.4)
Let δx represent the error in the INS-indicated position, velocity and
attitude such that:
xtrue = x + δx (4.5)
where x is the INS-indicated state. Taking the time derivative of this equation
and rearranging leads to:
δx = xtrue − ˙x (4.6)
Also, let δu represent the error in the measured angular velocity and specific
force vector such that:
utrue = u + δu (4.7)
Expanding equation (4.4) in a Taylor’s series about the INS-indicated
state results in:
xtrue = Γ (xtrue, t) = Γ (x, t) +[
∂Γ(x,u,t)∂x
]∗(xtrue − x)
+[
∂Γ(x,u,t)∂u
]∗(utrue − u) + · · ·
(4.8)
63

where []∗ indicates that the partial derivative is evaluated on the INS-indicated
solution. If second order and higher terms are neglected and the proper substi-
tutions from equations (4.5), (4.6), and (4.7) are made, the following equation
is obtained:
δx (t) =
[∂Γ (x, u, t)
∂x
]∗δx (t) +
[∂Γ (x, u, t)
∂u
]∗δu (t) (4.9)
Taking the indicated partial derivatives leads to the following set of
first order, linear ordinary differential equations for INS errors:
δrδvδq
=
03×3 I3×3 03×4
∂g(r)∂r
03×3∂CI
B
∂qf (t)
04×3 04×3 Ω (ω)
δrδvδq
+
03×3 03×3
03×3 CIB (q)
∂Ω∂ω
q 03×3
[δωδf
]
(4.10)
In order to simplify the expression∂CI
B
∂qδq f (t), it is convenient to define a
matrix D such that∂CI
B
∂qδq f (t) ≡ D
(q, f
)δq where:
DT = 2
q1f1 + q2f2 + q3f3 q2f1 − q1f2 − q4f3 q3f1 + q4f2 − q1f3
−q2f1 + q1f2 + q4f3 q1f1 + q2f2 + q3f3 −q4f1 + q3f2 − q2f3
−q3f1 − q4f2 + q1f3 q4f1 − q3f2 + q2f3 q1f1 + q2f2 + q3f3
q4f1 − q3f2 + q2f3 q3f1 + q4f2 − q1f3 −q2f1 + q1f2 + q4f3
(4.11)
With this definition and noting that ∂Ω∂ω
q = Q, where Q is defined in Section
2.1.7, (4.10) simplifies to:
δrδvδq
=
03×3 I3×3 03×4
∂g(r)∂r
03×3 D(q, f
)
04×3 04×3 Ω (ω)
δrδvδq
+
03×3 03×3
03×3 CIB (q)
Q (q) 03×3
[δωδf
]
(4.12)
64

where the gravity gradient matrix, ∂g(r)∂r
for a two-body gravity field is:
∂g
∂r=
3µx2
r5 − µr3
3µxyr5
3µxzr5
3µxyr5
3µy2
r5 − µr3
3µyzr5
3µxzr5
3µyzr5
3µz2
r5 − µr3
(4.13)
4.3.2 Sensor Error Models
The error models for gyros and accelerometers are described in this
section. The models described in this section serve two purposes. First, they
form the basis for the truth model needed for covariance analysis. Second,
when an error source is determined to have a significant effect on navigation
error, the variables associated with that error source can be added to the error
state vector and estimated by the GPS/INS Kalman filter. Since gyros and
accelerometers are subject to random errors, stochastic models are needed to
adequately characterize them.
4.3.2.1 Gyro Error Model
The purpose of the gyro error model is to provide the δω term in (4.12).
The specific details of any gyro error model depend on the type of gyro and
the characteristics of the errors found during testing. Gyro manufacturers
usually provide some specification numbers but do not publish the detailed
error models. Therefore, early in the navigation system design process, before
a particular gyro has been selected, simplified error models are used to perform
trade studies and requirements analysis.
The error model for a set of three orthogonal gyros can be defined
65

as:[15]
δω = (SG + MG) ω + δbG + δnlG + nG (4.14)
where the gyro scale factor error matrix is defined as:
SG =
δSFGx 0 00 δSFGy 00 0 δSFGz
(4.15)
and the gyro misalignment matrix is defined as:
MG =
0 −XGz XGy
Y Gz 0 −Y Gx
−ZGy ZGx 0
(4.16)
δbG represents the gyro bias, δnlG represents the gyro g-sensitive errors
and nG represents the gyro measurement noise.
4.3.2.2 Accelerometer Error Model
The purpose of the accelerometer error model is to provide the δf term
in (4.12). The accelerometer error model is very similar to the gyro error
model. The error model for a set of three orthogonal accelerometers can be
defined as:[15]
δf = (SA + MA) f + δbA + δnlA + nA (4.17)
where the accelerometer scale factor error matrix is defined as:
SA =
δSFAx 0 00 δSFAy 00 0 δSFAz
(4.18)
66

and the accelerometer misalignments matrix is defined as:
MA =
0 −XAz XAy
Y Az 0 −Y Ax
−ZAy ZAx 0
(4.19)
δbArepresents the accelerometer bias, δnlA represents the accelerometer
non-linearity and nA represents the accelerometer measurement noise.
4.3.3 Augmented INS Error Model
Additional states must be added to the INS error model in order to
account for the effects of gyro and accelerometer errors. The process of adding
these states is called state augmentation. The INS error model given in (4.12)
is in the form:
δx (t) = F (t) δx (t) + G (t) δu (t) (4.20)
Suppose that δu can be generated by a linear shaping filter such that:
xf (t) = Ff (t)xf (t) + Gf (t)w (t) (4.21)
where w is a white Gaussian noise process and:
δu (t) = Hf (t)xf (t) (4.22)
Then the augmented state vector xa can be defined as:
xa (t) =
[δx (t)
xf (t)
](4.23)
and the augmented state equation becomes:[δx (t)
xf (t)
]=
[F (t) G (t)Hf (t)
0 Ff (t)
][δx (t)
xf (t)
]+
[0
Gf (t)
]w (t) (4.24)
67

This process is applied to add states for gyro and accelerometer errors
into the INS error model. The gyro error model given by (4.14) and the ac-
celerometer error model given by (4.17) are used to form (4.22). The additional
states include a total of 24 states for gyro and accelerometer biases, misalign-
ments and scale factor errors. This increases the total number of states for the
INS error model to 34.
4.3.3.1 Adding Gyro and Accelerometer Bias States
States for gyro and accelerometer biases will be added to the INS error
model to illustrate the state augmentation process. The first step is to note
that equation (4.12) is written in the form of equation (4.20), where:
F (t) =
03×3 I3×3 03×4
∂g(r)∂r
03×3 D(q, f
)
04×3 04×3 Ω (ω)
(4.25)
G (t) =
03×3 03×3
03×3 CIB (q)
Q (q) 03×3
(4.26)
δu (t) =
[δωδf
](4.27)
Suppose that the gyro and accelerometer biases are modelled as first-order
Gauss-Markov processes such that:
δbG = − 1
τG
I3×3 δbG + wbG(t) (4.28)
δbA = − 1
τA
I3×3 δbA + wbA(t) (4.29)
68
Then, the augmented state vector becomes:
xa (t) =
δx (t)
δbG
δbA
(4.30)
and:
Hf (t) = Gf (t) = I6×6 (4.31)
The final piece needed to complete equation (4.24) is:
Ff (t) =
[ − 1τG
I3×3 03×3
03×3 − 1τA
I3×3
](4.32)
69
Chapter 5
GPS/INS Integration and Simulation
The integration of GPS and INS is achieved using a Kalman filter.
This chapter describes the integration architecture, Kalman filter design and
the GPS/INS simulation.
5.1 GPS/INS Simulation Description
The processes used to generate the chaser and ISS true trajectories,
the accelerometer and gyro measurements, and the GPS measurements for
the GPS/INS simulation are described in this section.
5.1.1 Rendezvous Trajectory Generation
The GPS/INS simulation is driven by the true trajectories of the chaser
and ISS. In order to generate the true trajectories, the following equations of
motion are integrated using an eighth-order Runge-Kutta numerical integrator
with a fixed step size of 0.5 seconds:
d2r
dt2= fdrag + fthrust + g (5.1)
70
where the acceleration due to atmospheric drag, fdrag, is computed using:
fdrag = −1
2
CDA
mρV 2
rel
Vrel
‖Vrel‖ (5.2)
where CD is the drag coefficient, A is the reference surface area, m is the mass.
The atmospheric density, ρ, is computed using the Harris-Priester density
model, which is described in Montenbruck [30].
Thrust is applied to maneuver the chaser spacecraft towards the ISS.
The magnitude of the acceleration due to thrust is assumed to be constant
during a maneuver and the direction of the thrust acceleration is assumed to
be fixed in the body frame. The process used to calculate the thrust direction
and duration is described in the next section.
The acceleration due to gravity, g, resulting from a spherical harmonic
gravity field is given by the gradient of the geopotential function:
g = ∇U (5.3)
where the geopotential function is given by:
U =µ
r
N∑n=2
n∑m=0
(RE
r
)n
Pnm sin φ [Cnm cos(mλ) + Snm sin(mλ)] (5.4)
71

and where:
µ = Earth’s gravitation constant
r = distance from the center of the Earth to the spacecraft
φ = geocentric latitude
λ = longitude measured east from the prime meridian
RE = the mean equatorial radius of the Earth
Pnm sin φ = associated Legendre function
Snm = sectorial harmonic coefficients
Cnm = tesseral harmonic coefficients
The JGM-3 (Joint Gravity Model) gravitation coefficients up to degree and
order 12, given in Montenbruck [30], were used to generate the chaser and
ISS truth trajectories. The spacecraft characteristics used for truth trajectory
generation are listed in Table 5.1.
Table 5.1: Spacecraft Characteristics
Chaser ISS
Mass (kg) 104328.0 128990.0
Area (m2) 454.4 640.7
Drag Coefficient 2.0 2.35
72
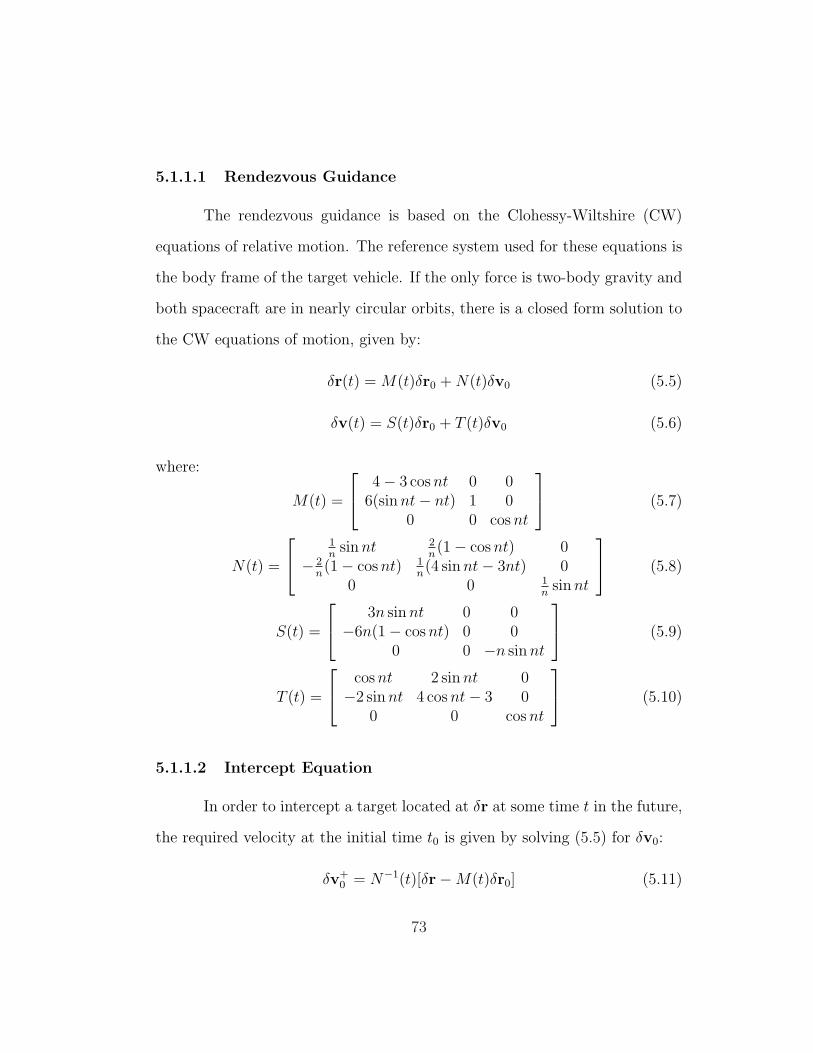
5.1.1.1 Rendezvous Guidance
The rendezvous guidance is based on the Clohessy-Wiltshire (CW)
equations of relative motion. The reference system used for these equations is
the body frame of the target vehicle. If the only force is two-body gravity and
both spacecraft are in nearly circular orbits, there is a closed form solution to
the CW equations of motion, given by:
δr(t) = M(t)δr0 + N(t)δv0 (5.5)
δv(t) = S(t)δr0 + T (t)δv0 (5.6)
where:
M(t) =
4− 3 cos nt 0 06(sin nt− nt) 1 0
0 0 cos nt
(5.7)
N(t) =
1n
sin nt 2n(1− cos nt) 0
− 2n(1− cos nt) 1
n(4 sin nt− 3nt) 0
0 0 1n
sin nt
(5.8)
S(t) =
3n sin nt 0 0−6n(1− cos nt) 0 0
0 0 −n sin nt
(5.9)
T (t) =
cos nt 2 sin nt 0−2 sin nt 4 cos nt− 3 0
0 0 cos nt
(5.10)
5.1.1.2 Intercept Equation
In order to intercept a target located at δr at some time t in the future,
the required velocity at the initial time t0 is given by solving (5.5) for δv0:
δv+0 = N−1(t)[δr−M(t)δr0] (5.11)
73

The required change in velocity needed to intercept the target is:
∆v0 = δv+0 − δv−0 (5.12)
where δv−0 is the relative velocity before the maneuver.
5.1.1.3 Glideslope Targeting
The glideslope targeting algorithm is described in Hablani [20] and
summarized here. At the initial time, the chaser vehicle is located at δr0 with
relative velocity equal to δv−0 . It is required to arrive at δr = δrT in a transfer
time of T .
A straight line from δr0 to δrT , which is the commanded path, is de-
noted by the vector ρ. The boundary conditions of ρ are ρ(t0) = δr0 − δrT
and ρ(T ) = 0.
The direction of the straight path is given by the unit vector uρ:
uρ =
x0−xT
ρ0y0−yT
ρ0z0−zT
ρ0
(5.13)
therefore, ρ(t) = ρuρ.
The glideslope guidance specifies the distance to go, ρ, as a function
of time so that the chaser is commanded to reach δrT in a period T with an
arrival velocity of ρTuρ, where ρT is a safe relative speed at the distance δrT
from the target.
74

As ρ diminishes, ρ must also diminish. The following linear relationship
is postulated:
ρ(t) = aρ(t) + ρT (5.14)
The boundary conditions on ρ and ρ at t0 are:
ρ(t0) = ρ0
ρ(t0) = ρ0 < 0 (5.15)
and at t = T :
ρ(T ) = 0
ρ(T ) = ρT < 0 (5.16)
The initial distance to go, ρ0, the initial commanded velocity, ρ0 and the final
commanded arrival velocity, ρT , are all known or specified. The slope, a is
given by:
a =ρ0 − ρT
ρ0
< 0 (5.17)
The solution to (5.14) with boundary conditions given by (5.15) and (5.16) is:
ρ(t) = ρ0eat +
ρT
a[eat − 1] (5.18)
and the transfer time is given by:
T =1
aln
ρT
ρ0
(5.19)
75
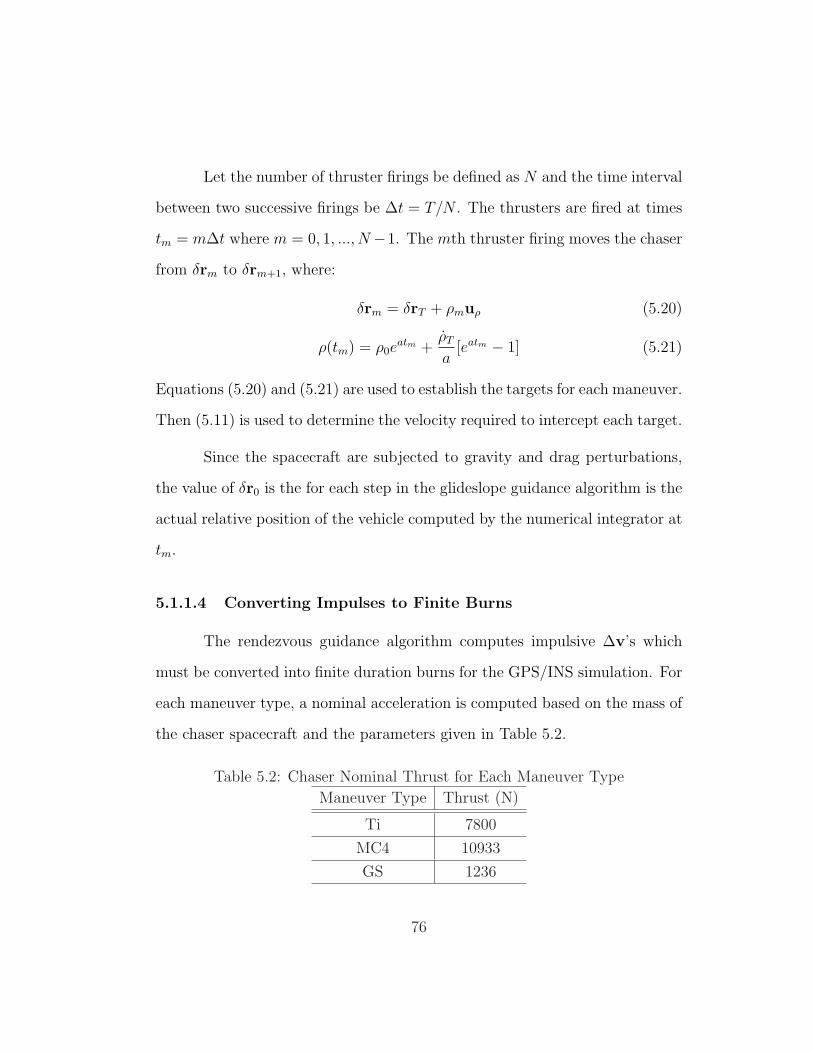
Let the number of thruster firings be defined as N and the time interval
between two successive firings be ∆t = T/N . The thrusters are fired at times
tm = m∆t where m = 0, 1, ..., N−1. The mth thruster firing moves the chaser
from δrm to δrm+1, where:
δrm = δrT + ρmuρ (5.20)
ρ(tm) = ρ0eatm +
ρT
a[eatm − 1] (5.21)
Equations (5.20) and (5.21) are used to establish the targets for each maneuver.
Then (5.11) is used to determine the velocity required to intercept each target.
Since the spacecraft are subjected to gravity and drag perturbations,
the value of δr0 is the for each step in the glideslope guidance algorithm is the
actual relative position of the vehicle computed by the numerical integrator at
tm.
5.1.1.4 Converting Impulses to Finite Burns
The rendezvous guidance algorithm computes impulsive ∆v’s which
must be converted into finite duration burns for the GPS/INS simulation. For
each maneuver type, a nominal acceleration is computed based on the mass of
the chaser spacecraft and the parameters given in Table 5.2.
Table 5.2: Chaser Nominal Thrust for Each Maneuver Type
Maneuver Type Thrust (N)
Ti 7800
MC4 10933
GS 1236
76

The magnitude of the thrust acceleration is given by:
athrust =thrust
mass(5.22)
The burn duration is computed by:
tburn =‖∆v‖athrust
(5.23)
Then the burn duration, tburn, is rounded up to the next even number of
seconds in order to start and stop the burns on integer seconds in simulation
time. The burn start time and stop times are computed by:
tstart = tm − tburn
2
tstop = tm +tburn
2
The thrust acceleration is then lowered to obtain the desired burn du-
ration. The direction of the thrust acceleration vector is held fixed in the
spacecraft body frame and is given by:
uthrust =∆v
‖∆v‖ (5.24)
5.1.1.5 Open Loop vs. Closed Loop Guidance
The true trajectory for the simulations in this dissertation are com-
puted and stored in a file before the measurement generation process is run.
Therefore, the output of the navigation process cannot be used to change
the true trajectory. So the guidance scheme used to generate the rendezvous
trajectories is not considered to be closed-loop.
77
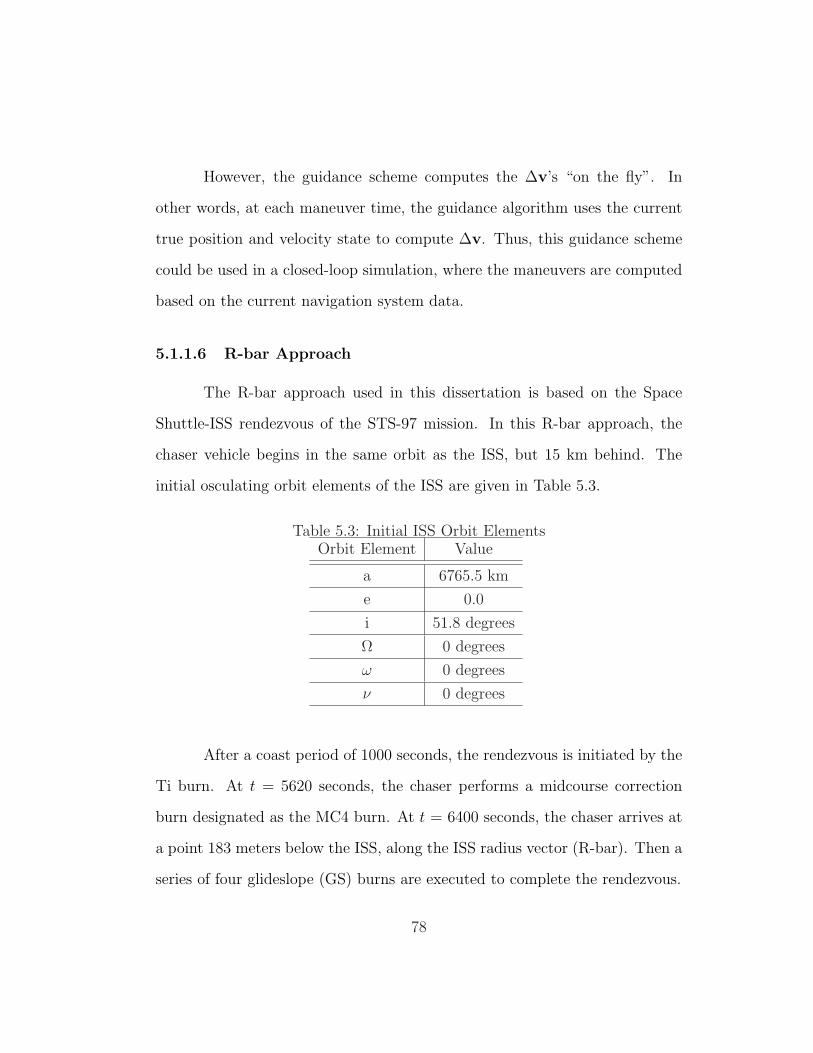
However, the guidance scheme computes the ∆v’s “on the fly”. In
other words, at each maneuver time, the guidance algorithm uses the current
true position and velocity state to compute ∆v. Thus, this guidance scheme
could be used in a closed-loop simulation, where the maneuvers are computed
based on the current navigation system data.
5.1.1.6 R-bar Approach
The R-bar approach used in this dissertation is based on the Space
Shuttle-ISS rendezvous of the STS-97 mission. In this R-bar approach, the
chaser vehicle begins in the same orbit as the ISS, but 15 km behind. The
initial osculating orbit elements of the ISS are given in Table 5.3.
Table 5.3: Initial ISS Orbit ElementsOrbit Element Value
a 6765.5 km
e 0.0
i 51.8 degrees
Ω 0 degrees
ω 0 degrees
ν 0 degrees
After a coast period of 1000 seconds, the rendezvous is initiated by the
Ti burn. At t = 5620 seconds, the chaser performs a midcourse correction
burn designated as the MC4 burn. At t = 6400 seconds, the chaser arrives at
a point 183 meters below the ISS, along the ISS radius vector (R-bar). Then a
series of four glideslope (GS) burns are executed to complete the rendezvous.
78
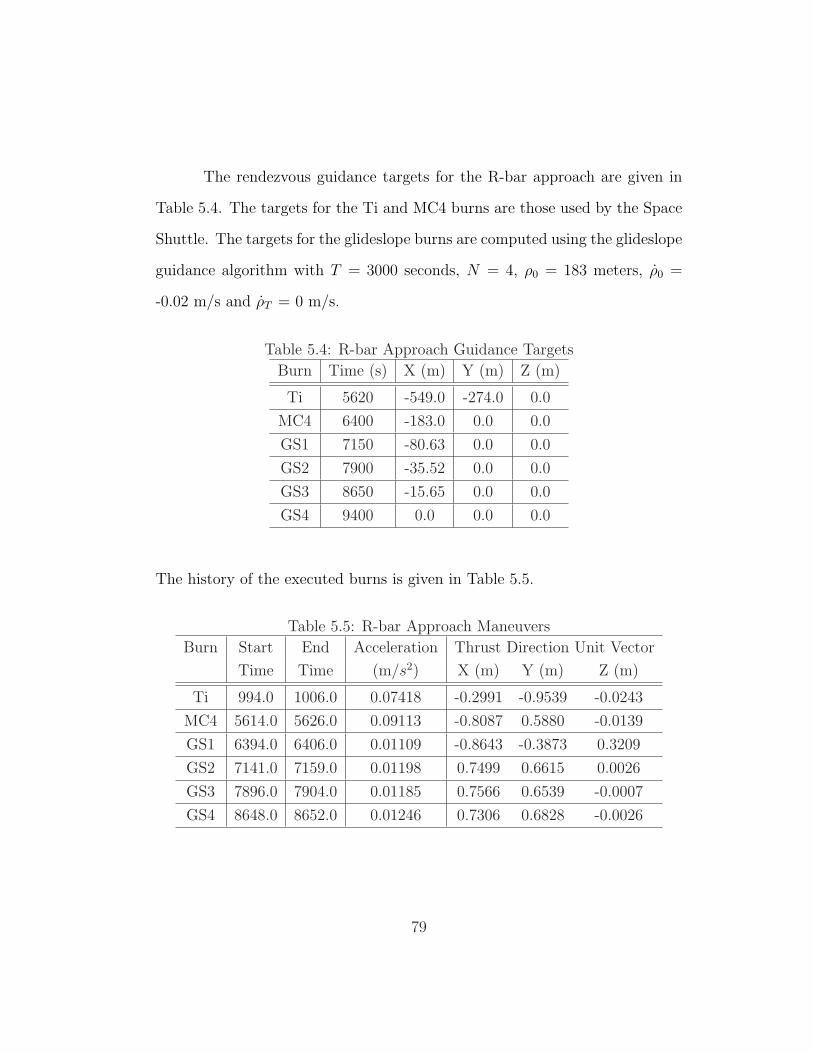
The rendezvous guidance targets for the R-bar approach are given in
Table 5.4. The targets for the Ti and MC4 burns are those used by the Space
Shuttle. The targets for the glideslope burns are computed using the glideslope
guidance algorithm with T = 3000 seconds, N = 4, ρ0 = 183 meters, ρ0 =
-0.02 m/s and ρT = 0 m/s.
Table 5.4: R-bar Approach Guidance Targets
Burn Time (s) X (m) Y (m) Z (m)
Ti 5620 -549.0 -274.0 0.0
MC4 6400 -183.0 0.0 0.0
GS1 7150 -80.63 0.0 0.0
GS2 7900 -35.52 0.0 0.0
GS3 8650 -15.65 0.0 0.0
GS4 9400 0.0 0.0 0.0
The history of the executed burns is given in Table 5.5.
Table 5.5: R-bar Approach Maneuvers
Burn Start End Acceleration Thrust Direction Unit Vector
Time Time (m/s2) X (m) Y (m) Z (m)
Ti 994.0 1006.0 0.07418 -0.2991 -0.9539 -0.0243
MC4 5614.0 5626.0 0.09113 -0.8087 0.5880 -0.0139
GS1 6394.0 6406.0 0.01109 -0.8643 -0.3873 0.3209
GS2 7141.0 7159.0 0.01198 0.7499 0.6615 0.0026
GS3 7896.0 7904.0 0.01185 0.7566 0.6539 -0.0007
GS4 8648.0 8652.0 0.01246 0.7306 0.6828 -0.0026
79
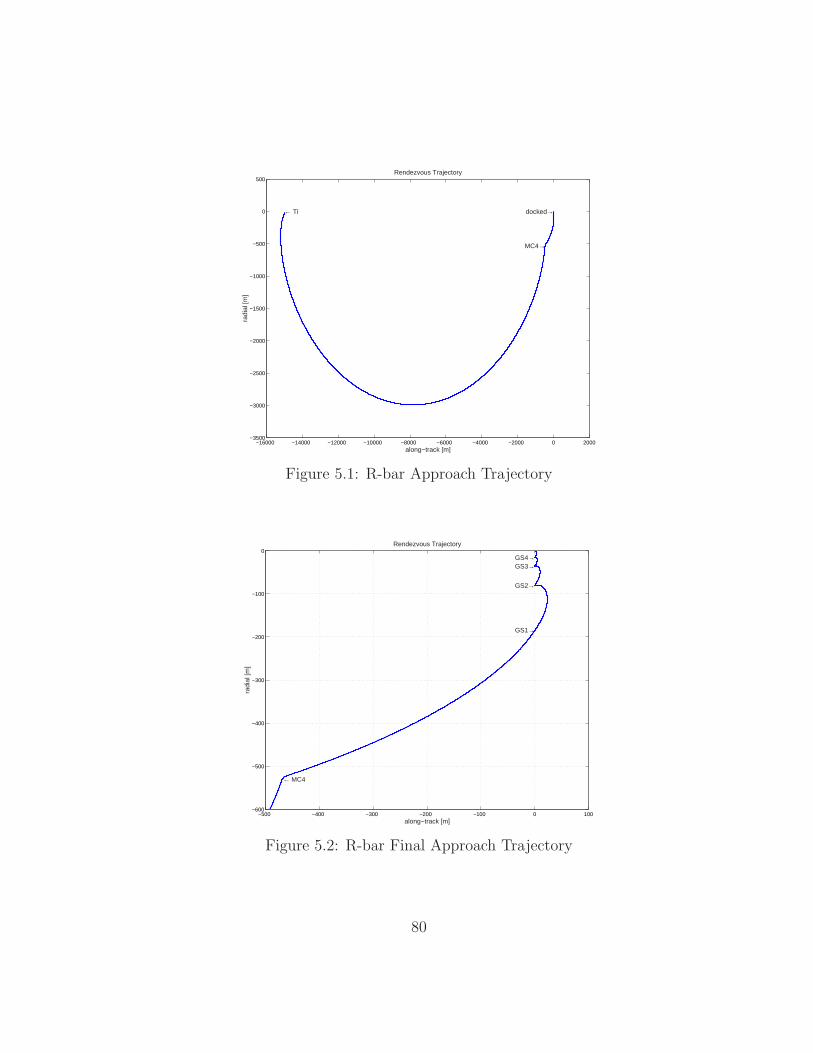
−16000 −14000 −12000 −10000 −8000 −6000 −4000 −2000 0 2000−3500
−3000
−2500
−2000
−1500
−1000
−500
0
500
along−track [m]
radi
al [m
]
← Ti docked→
MC4→
Rendezvous Trajectory
Figure 5.1: R-bar Approach Trajectory
−500 −400 −300 −200 −100 0 100−600
−500
−400
−300
−200
−100
0
along−track [m]
radi
al [m
]
← MC4
GS1→
GS2→
GS3→GS4→
Rendezvous Trajectory
Figure 5.2: R-bar Final Approach Trajectory
80
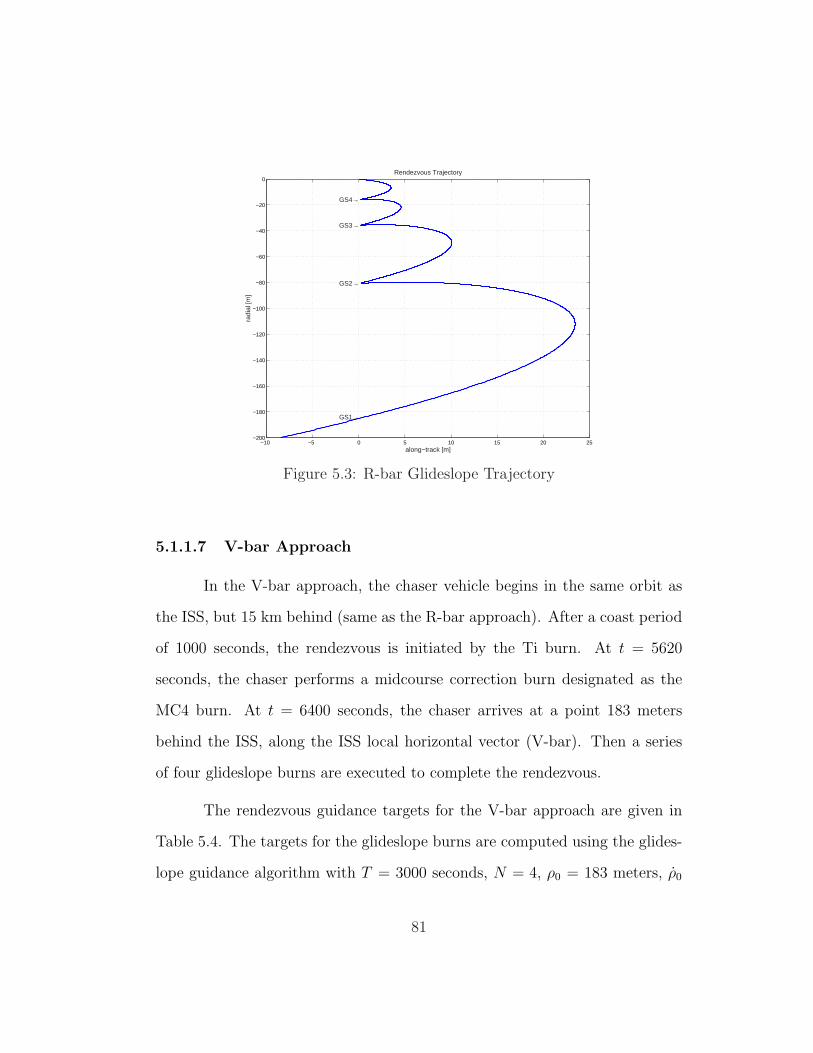
−10 −5 0 5 10 15 20 25−200
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
along−track [m]
radi
al [m
]
GS1→
GS2→
GS3→
GS4→
Rendezvous Trajectory
Figure 5.3: R-bar Glideslope Trajectory
5.1.1.7 V-bar Approach
In the V-bar approach, the chaser vehicle begins in the same orbit as
the ISS, but 15 km behind (same as the R-bar approach). After a coast period
of 1000 seconds, the rendezvous is initiated by the Ti burn. At t = 5620
seconds, the chaser performs a midcourse correction burn designated as the
MC4 burn. At t = 6400 seconds, the chaser arrives at a point 183 meters
behind the ISS, along the ISS local horizontal vector (V-bar). Then a series
of four glideslope burns are executed to complete the rendezvous.
The rendezvous guidance targets for the V-bar approach are given in
Table 5.4. The targets for the glideslope burns are computed using the glides-
lope guidance algorithm with T = 3000 seconds, N = 4, ρ0 = 183 meters, ρ0
81
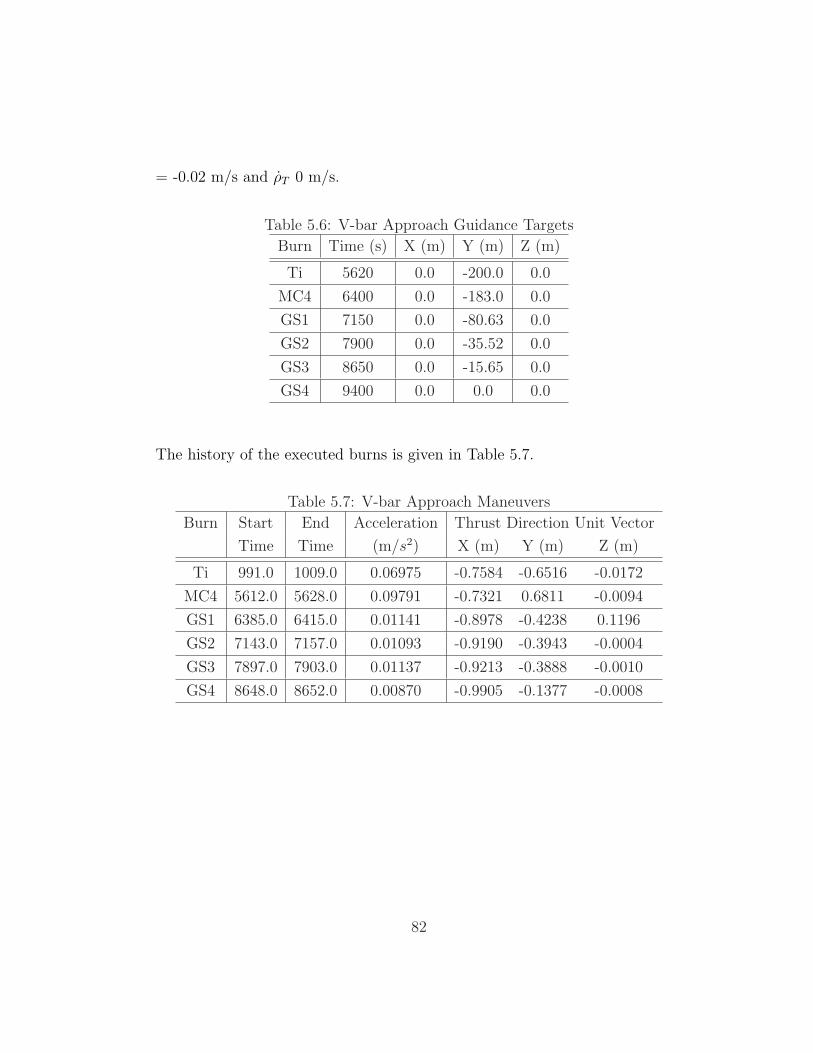
= -0.02 m/s and ρT 0 m/s.
Table 5.6: V-bar Approach Guidance Targets
Burn Time (s) X (m) Y (m) Z (m)
Ti 5620 0.0 -200.0 0.0
MC4 6400 0.0 -183.0 0.0
GS1 7150 0.0 -80.63 0.0
GS2 7900 0.0 -35.52 0.0
GS3 8650 0.0 -15.65 0.0
GS4 9400 0.0 0.0 0.0
The history of the executed burns is given in Table 5.7.
Table 5.7: V-bar Approach Maneuvers
Burn Start End Acceleration Thrust Direction Unit Vector
Time Time (m/s2) X (m) Y (m) Z (m)
Ti 991.0 1009.0 0.06975 -0.7584 -0.6516 -0.0172
MC4 5612.0 5628.0 0.09791 -0.7321 0.6811 -0.0094
GS1 6385.0 6415.0 0.01141 -0.8978 -0.4238 0.1196
GS2 7143.0 7157.0 0.01093 -0.9190 -0.3943 -0.0004
GS3 7897.0 7903.0 0.01137 -0.9213 -0.3888 -0.0010
GS4 8648.0 8652.0 0.00870 -0.9905 -0.1377 -0.0008
82
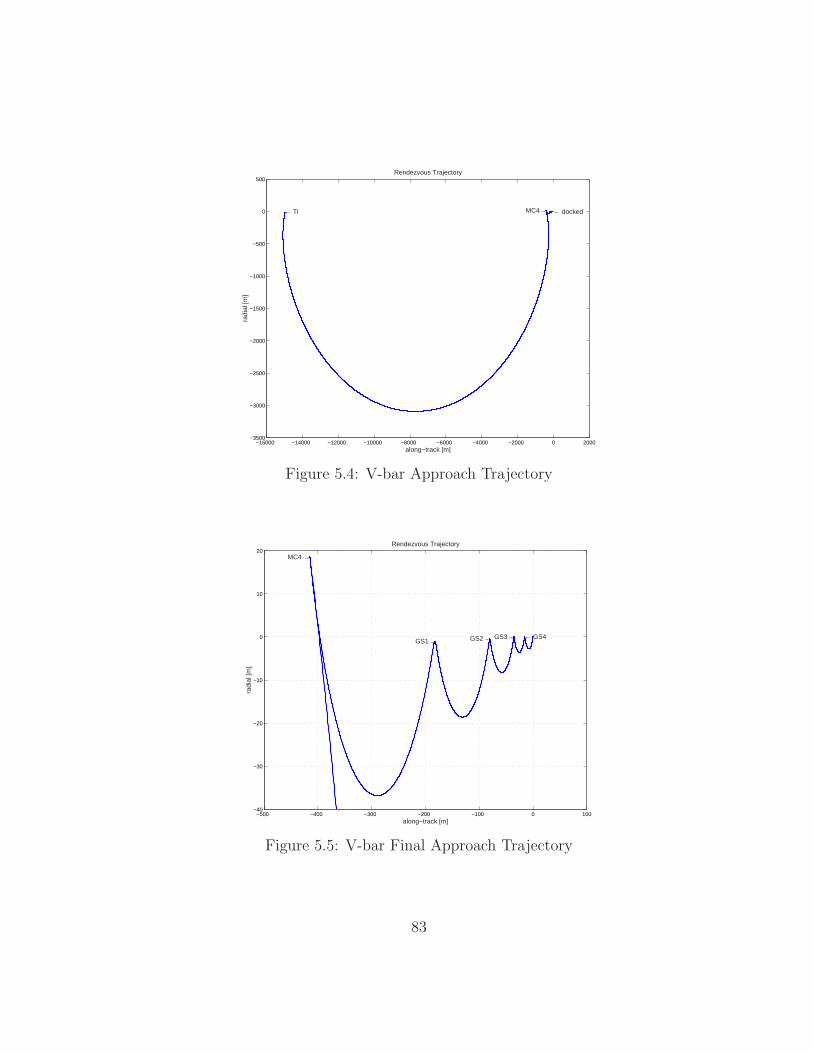
−16000 −14000 −12000 −10000 −8000 −6000 −4000 −2000 0 2000−3500
−3000
−2500
−2000
−1500
−1000
−500
0
500
along−track [m]
radi
al [m
]
← Ti ← dockedMC4→
Rendezvous Trajectory
Figure 5.4: V-bar Approach Trajectory
−500 −400 −300 −200 −100 0 100−40
−30
−20
−10
0
10
20
along−track [m]
radi
al [m
]
MC4 →
GS1→ GS2→ GS3→ ← GS4
Rendezvous Trajectory
Figure 5.5: V-bar Final Approach Trajectory
83
5.1.2 Generation of Simulated INS Measurements
The process used to generate simulated INS measurements is described
in this section. In modern digital systems, gyro and accelerometer outputs
are provided in the form of velocity and angle increments. The torques and
specific forces are summed over a short time interval, δt, referred to as the
sampling interval. This corresponds to the raw data rate of the IMU or some
multiple of it. The accumulated angle and velocity contains the high frequency
information of the dynamics even if δt is comparatively long. Typical values
for δt are 0.005 to 0.02 seconds for highly dynamic applications. For a space
application, the samples times can be much longer as shown in Section 5.2.2.1.
Let ∆θl be defined as a vector containing the angular increments from
all three gyros summed over the lth time increment, where the sampling in-
tervals, δt = tl − tl−1, are constant. The data received from the gyros can be
expressed as:
∆θl =
∫ tl
tl−1
ωBI (t) dt (5.25)
Similarly, let ∆vl be defined as a vector containing the velocity incre-
ments from all three accelerometers summed over the lth time increment. The
data received from the accelerometers can be expressed as:
∆vl =
∫ tl
tl−1
f (t) dt (5.26)
The gyro and accelerometer measurements can be represented by (5.25)
and (5.26) respectively. These equations can also be expressed as differential
84
equations over the sampling interval:
∆θl = ωBI (5.27)
∆vl = fB (5.28)
The measured quantities are equal to the true quantities minus the errors,
therefore:
∆θl = ωBItrue − δω (5.29)
∆vl = fBtrue − δf (5.30)
Substituting from the gyro and accelerometer error models, neglecting the
non-linearity terms, leads to the following:
∆θl = (I− SG −MG)3×3 ωBItrue − δbG − nG (5.31)
∆vl = (I− SA −MA)3×3 fBtrue − δbA − nA (5.32)
Since the scale factor and misalignment errors are modelled as random
constants, the first terms of these equations are deterministic after turn-on.
The gyro and accelerometer biases are modelled as first-order Gauss-Markov
processes for the SIGI sensors, therefore, the following additional equations
need to be integrated:
δbG = − 1
τG
I3×3 δbG + wbG(t) (5.33)
δbA = − 1
τA
I3×3 δbA + wbA(t) (5.34)
85

These equations can be written for the gyros and accelerometers in the follow-
ing form:
x (t) = F (t)x (t) + B (t)u (t) + G (t)w (t) (5.35)
The gyro equations can be written:
[δbG
∆θ
]=
[FbG
03×3
−I3×3 03×3
][δbG
∆θ
]+
[03×3 03×3
I− SG −MG 03×3
][03×1
ωBItrue
]
+
[I3×3 03×3
03×3 −I3×3
][wbG
nG
](5.36)
The accelerometer equations can be written:
[δbA
∆v
]=
[FbA
03×3
−I3×3 03×3
][δbA
∆v
]+
[03×3 03×3
I− SA −MA 03×3
][03×1
fBtrue
]
+
[I3×3 03×3
03×3 −I3×3
][wbA
nA
](5.37)
The contributions to the accumulated sensor measurements can be separated
into deterministic and stochastic parts. The middle terms of these equations
represent the deterministic contributions to the measurements and will be
handled separately. The stochastic equations then become:
[δbG
∆θ
]=
[FbG
03×3
−I3×3 03×3
][δbG
∆θ
]+
[I3×3 03×3
03×3 −I3×3
][wbG
nG
](5.38)
[δbA
∆v
]=
[FbA
03×3
−I3×3 03×3
][δbA
∆v
]+
[I3×3 03×3
03×3 −I3×3
][wbA
nA
](5.39)
86

The variables FbGand FbA
depend on the type of stochastic process used to
model the gyros and accelerometers. If gyro and accelerometer biases are
modelled as first order Gauss-Markov processes, then for three identical gyros
and three identical accelerometers:
FbG= − 1
τG
I3×3
FbA= − 1
τA
I3×3
where τG and τA are the gyro and accelerometer bias correlation times. For
details on stochastic process modelling, see Appendix B.
In order to generate the gyro and accelerometer measurements, these
differential equations are converted to equivalent stochastic difference equa-
tions of the following form:
x (ti+1) = Φ (ti+1, ti)x (ti) + wd (ti) (5.40)
The stochastic difference equations are then used to propagate the biases and
to accumulate the stochastic contribution to the sensor measurements. The
parameters presented in Table 5.8 were used to simulate the gyros and ac-
celerometers of the SIGI.
87
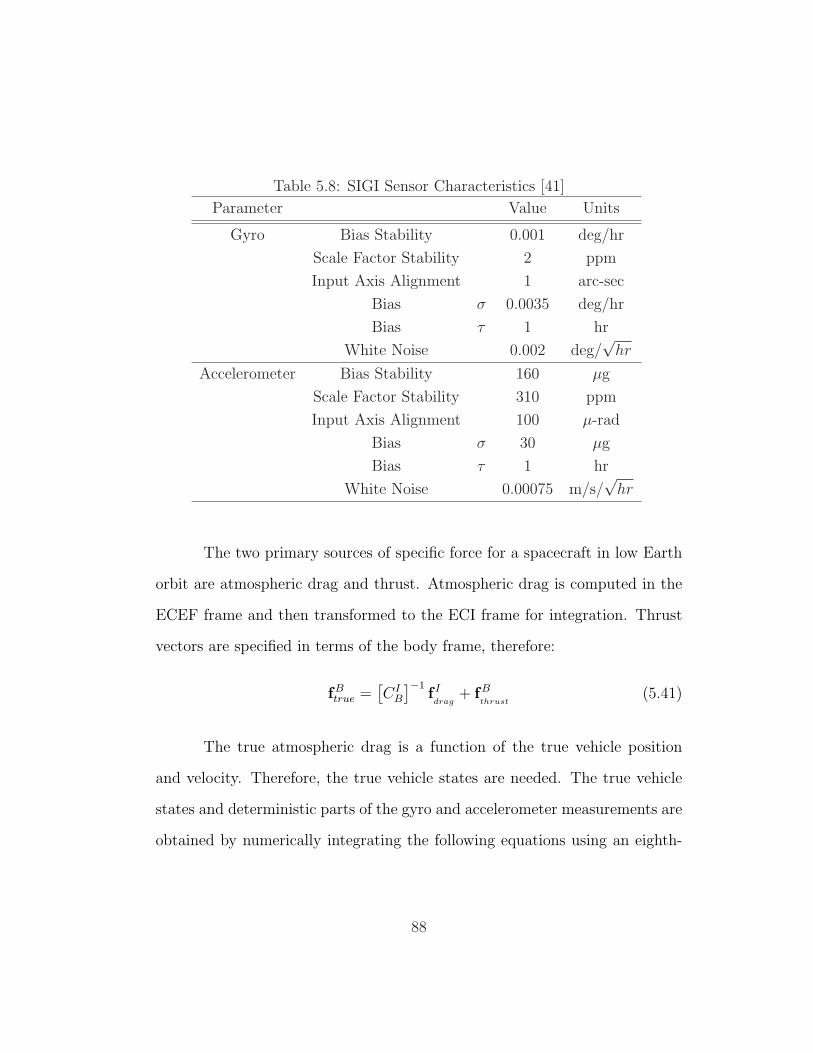
Table 5.8: SIGI Sensor Characteristics [41]
Parameter Value Units
Gyro Bias Stability 0.001 deg/hr
Scale Factor Stability 2 ppm
Input Axis Alignment 1 arc-sec
Bias σ 0.0035 deg/hr
Bias τ 1 hr
White Noise 0.002 deg/√
hr
Accelerometer Bias Stability 160 µg
Scale Factor Stability 310 ppm
Input Axis Alignment 100 µ-rad
Bias σ 30 µg
Bias τ 1 hr
White Noise 0.00075 m/s/√
hr
The two primary sources of specific force for a spacecraft in low Earth
orbit are atmospheric drag and thrust. Atmospheric drag is computed in the
ECEF frame and then transformed to the ECI frame for integration. Thrust
vectors are specified in terms of the body frame, therefore:
fBtrue =
[CI
B
]−1f I
drag+ fB
thrust(5.41)
The true atmospheric drag is a function of the true vehicle position
and velocity. Therefore, the true vehicle states are needed. The true vehicle
states and deterministic parts of the gyro and accelerometer measurements are
obtained by numerically integrating the following equations using an eighth-
88

order Runge-Kutta integrator:
rtrue
vtrue
qtrue
∆θ∆v
=
vtrue
CIBfB
true + gtrue
Ω (ωBItrue) qtrue
(I− SG −MG)ωBI
(I− SA −MA)fBtrue
(5.42)
Instead of carrying forward the ∆θ and ∆v states forward from one
integration step to the next, they are zeroed out after they are added to the
stochastic contributions and recorded at each sample time in order to simulate
the measurement accumulation process.
5.1.3 GPS Measurement Generation
This section describes the models used to generate simulated GPS mea-
surements for C/A code pseudorange and carrier phase measurements.
5.1.3.1 Pseudorange and Carrier Phase Measurements
The GPS pseudorange and carrier phase measurements are generated
at a once per second rate using the following equations:
P (t) = ρ + [c− ρ] ∆tR − c∆tS + ∆URE + ∆iono + ∆mp + εpr (5.43)
λΦ(t) = ρ + [c− ρ] ∆tR − c∆tS + ∆URE + ∆iono + ∆mp + λN + εcp
The pseudorange and carrier phase range measurement errors are as-
sumed to be zero-mean, white Gaussian random numbers with the following
89
standard deviations:
σεpr = 2.0 m (5.44)
σεcp = 0.02 m (5.45)
The multipath model is described in Chapter 3. The models used to
compute the GPS SV clock and ephemeris errors, and ionospheric delays are
described in the sections below.
5.1.3.2 Single Difference Carrier Phase Measurements
The single difference carrier phase measurements are generated for each
GPS SV as follows:
1. If the GPS SV is visible at the chaser, the carrier phase measurement
for the chaser is generated.
2. If the GPS SV is visible at the ISS, the carrier phase measurement for
the ISS is generated.
3. If the GPS SV is visible to both the chaser and ISS, the single difference
carrier phase measurement is generated by subtracting the ISS measure-
ment from the chaser measurement.
Each carrier phase measurement is generated with all appropriate error
sources included. When the single difference is formed, no assumption is made
about the cancellation of errors. Since the common errors between the chaser
90

and ISS are not exactly equal, there are small residual errors remaining in the
single difference carrier phase measurements sent to the Kalman filter.
5.1.3.3 GPS Receiver Clock Model
The GPS receiver clock model is described in Brown and Hwang [7] and
summarized in this section. Let bc denote the receiver clock bias converted to
meters, such that:
bc = c∆tR (5.46)
where c is the speed of light. The receiver clock bias and drift are modelled as
random-walk processes: [13]
bc = dc + wf + ch (5.47)
dc = wg (5.48)
where dc is the clock drift, h is the frequency correction due to relativistic
effects, and wf and wg are zero-mean white Gaussian variables with power
spectral amplitudes of Sf and Sg, respectively.
In near circular orbits, h can be approximated by: [13]
h =1
c2
(µ
RE
− µ
r− v2
2
)(5.49)
where r is the average distance of the the receiver from the center of the planet,
v is the average velocity in the inertial frame, and RE is the average radius of
91

the planet. For a spacecraft in the orbit defined in Table 5.3, the frequency
correction is:
h = −3.27× 10−10 (s/s) (5.50)
The discrete-time process noise covariance matrix is given by:
E[wbw
Tb
]=
Sf∆t + Sg∆t3
3Sg
∆t2
2
Sg∆t2
2Sg∆t
(5.51)
Typical values for temperature controlled crystal oscillators commonly used
on commercial GPS receivers are: [13]
Sf = 1.0c2 × 10−19(m2/s) (5.52)
Sg = 4.0c2π2 × 10−20(m2/s3) (5.53)
5.1.3.4 Ionospheric Delay
The ionosphere is an important source of errors for GPS receivers. The
ionospheric range error can vary from a few meters to tens of meters. Using a
first order approximation of the refractive index, the ionospheric range error
I can be written as: [34]
I =40.3
f 2
∫Ne ds (5.54)
where Ne is the number of electrons per cubic meter. The quantity∫
Ne ds is
the total electron content (TEC) integrated along the path from the receiver
to each GPS satellite. If the integration path is along the local vertical, the
92
total vertical electron content (TVEC) is: [13]
TVEC =
∫ h1
h0
Ne dh (5.55)
where h0 is the altitude of the GPS receiver and h1 is the altitude of the GPS
satellite. Then the ionospheric range error in meters for the L1 signal along
the local vertical is given by:
IV =40.3
f 2L1
TVEC (5.56)
where fL1 = 1575.42 × 106 Hz. The following simple model accounts for the
diurnal variation of TVEC: [13]
TVEC = TVECref [1 + 0.143 (usun · ur)]8 (5.57)
where usun is the unit vector pointing from the center of the Earth to the
Sun and uris the unit vector pointing from the center of the Earth to the
receiver.[2] For the GPS/INS simulation, the value of TVECref is a constant,
which is selectable by the user and set to 2.0× 1017 electrons/m2.
The ionospheric delay in meters for each GPS signal is computed using
the following obliquity equation:
∆iono =2.04 IV
sin E +√
sin2 E + 0.076(5.58)
where E is the elevation angle of the signal path with respect to the local
horizon. [13]
93

5.1.3.5 SV Clock and Ephemeris Errors
This section describes the model used to compute the range errors due
to GPS SV ephemeris and clock errors. Zumberge and Bertiger [34] studied
the accuracy of the ephemeris and clock corrections sent to users in the GPS
navigation message. Their study yielded standard deviations of the ephemeris
and clock correction errors, which are presented in Table 5.9.
Table 5.9: Observed Ephemeris and Clock Errors
Parameter Observed Standard Deviation
Radial (σr) 1.2 m
Cross-track (σc) 3.2 m
Along-track (σa) 4.5 m
Clock (no SA) (σt) 11.2 ns or 3.36 m
For each GPS SV, the ephemeris and clock errors are modelled as ran-
dom constants obtained from zero-mean, Gaussian distributions with standard
deviations given in Table 5.9. The radial, along-track and cross-track errors for
each GPS satellite form an ephemeris error vector in the UVW frame, centered
at the GPS SV position.
The ephemeris error vector is transformed to the ECI frame by:
εECI = CIB εUV W (5.59)
The range measurement error due to the ephemeris error is found by:
δρephem =εECI · ρj
ρj
(5.60)
94
The clock error is converted to meters and added to the ephemeris error
contribution to form the user range error (URE):
∆URE = δρephem + c∆tS (5.61)
5.1.3.6 Integer Ambiguity
The integer ambiguity is a bias error associated with each carrier phase
measurement. The integer ambiguity N for each receiver and GPS SV combina-
tion is obtained from a zero-mean, Gaussian random variable with a standard
deviation of 1×106 cycles and remains constant over the simulation. No cycle
slips are simulated.
5.2 GPS/INS Integration
The complementary filter method of integration with the INS provid-
ing the reference trajectory was chosen for a number of reasons. The INS was
chosen to provide the reference trajectory because it is self-contained, contin-
uous, and provides accurate position, velocity and attitude measurements in
the short term.
The complementary filter estimates the errors in the INS position, ve-
locity and attitude so that the linear INS error model can be used. It also
allows the addition of other sensors if needed. Finally, the complementary fil-
ter can be run at a lower update rate because the dynamics of the INS errors
have a much lower frequency than the dynamics of the total state variables.
95
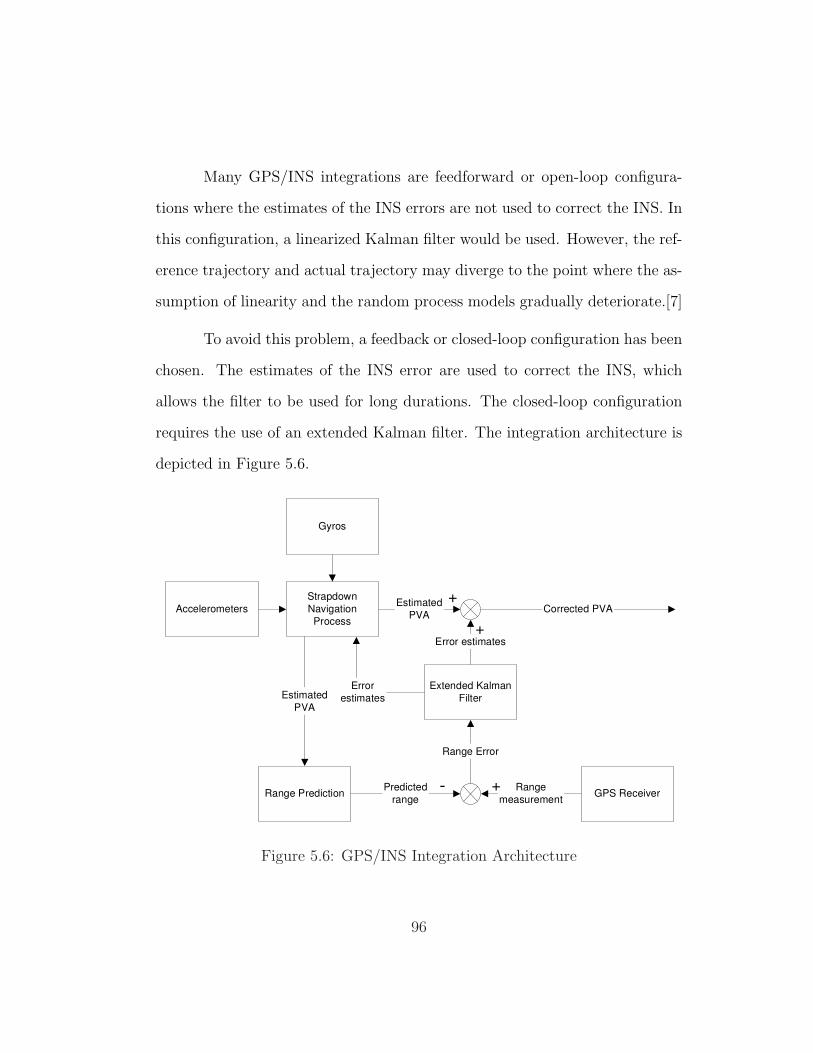
Many GPS/INS integrations are feedforward or open-loop configura-
tions where the estimates of the INS errors are not used to correct the INS. In
this configuration, a linearized Kalman filter would be used. However, the ref-
erence trajectory and actual trajectory may diverge to the point where the as-
sumption of linearity and the random process models gradually deteriorate.[7]
To avoid this problem, a feedback or closed-loop configuration has been
chosen. The estimates of the INS error are used to correct the INS, which
allows the filter to be used for long durations. The closed-loop configuration
requires the use of an extended Kalman filter. The integration architecture is
depicted in Figure 5.6.
Gyros
Accelerometers
Strapdown
Navigation
Process
Range Prediction GPS Receiver
Extended Kalman
FilterEstimated
PVA
Predicted
range
Range
measurement
Range Error
Estimated
PVA
Error
estimates
Error estimates
Corrected PVA
+-
+
+
Figure 5.6: GPS/INS Integration Architecture
96

One advantage of the closed-loop configuration is the ability to aid
the GPS tracking loops. This allows the GPS receiver to quickly re-acquire
satellites after loss of signal lock due to blockage, maneuvers or blackout during
re-entry.
In this dissertation, the GPS tracking loops are not simulated. The
simulated GPS receivers are able to acquire and track GPS SVs as soon as
they become visible. This would be the best case performance resulting from
aiding of the GPS tracking loops.
Three filters have been developed during this research: a GPS/INS
absolute navigation filter, a GPS/INS relative navigation filter, and a GPS-
only relative navigation filter. The details of these filters are described below.
5.2.1 Extended Kalman Filter Equations
The formulation of the extended Kalman filter equations is discussed
in detail in many textbooks, such as Brown and Hwang. [7] The equations are
summarized in this section. The general state and measurement models are
given by:
x(t) = f (x(t), t) + G (t)w (t) (5.62)
zk = h (xk) + vk (5.63)
where w (t) ∼ N (0, Q (t)) and vk ∼ N (0, Rk). In order to linearize the state
and measurement models, define the output and system matrices as:
Hk ≡ ∂h
∂x
∣∣∣∣x=x
F ≡ ∂f
∂x
∣∣∣∣x=x
(5.64)
97
The state and covariance propagation equations are:
x(t) = f (x(t), t) (5.65)
Φ (tk, tk−1) = F (tk−1) Φ (tk, tk−1) (5.66)
P−k = Φ (tk, tk−1) P+
k−1ΦT (tk, tk−1) + Qk (5.67)
The Kalman gain is computed by:
Kk = P−k HT
k
[HkP
−k HT
k + Rk
]−1(5.68)
The measurement update equations are:
x+k = x−k + Kk
[yk − h
(x−k
)](5.69)
P+k =
[I −KkHk
(x−k
)]P−
k (5.70)
5.2.2 Numerical Integration of INS Solution
In a complementary GPS/INS filter, the reference trajectory is sup-
plied by integrating the equations of motion using the gyro and accelerometer
measurements. The following classical fourth-order Runge-Kutta equation is
used in the EKF for this integration:
xi+1 = xi +∆t
6(k1 + 2k2 + 2k3 + k4) (5.71)
where:
k1 = f(ti,xi) (5.72)
k2 = f(ti +∆t
2,xi +
∆t
2k1) (5.73)
98

k3 = f(ti +∆t
2,xi +
∆t
2k2) (5.74)
k4 = f(ti + ∆t,xi + ∆tk3) (5.75)
This algorithm requires that the function being integrated be evaluated
at the ends of the integration interval and half way in between. Therefore, the
integration interval, ∆t, is defined to be twice the gyro and accelerometer
sampling interval:
∆t = 2δt (5.76)
In order to compute k1 through k4, the gyro measurements must be converted
to estimates of the angular velocity and the accelerometer measurements must
be converted to estimates of specific force at times tl−2, tl−1 and tl. This
process is discussed in detail in Jekeli [22] and summarized below.
For the gyro measurements, a Taylor series expansion of the angular
velocity vector about tl−2 yields:
ω (t) = ωl−2 + ωl−2 [t− tl−2] + O(∆t2
), |t− tl−2| ≤ ∆t (5.77)
Substituting (5.77) into (5.25) and assuming the angular velocity and
angular velocity rate are constant over the sampling interval yields:
δθl−1 = ωl−2δt +1
2ωl−2δt
2 + O(∆t3
)(5.78)
δθl = ωl−2δt +3
2ωl−2δt
2 + O(∆t3
)(5.79)
99

Ignoring the higher order terms and solving (5.78) and (5.79) for ωl−2 and
ωl−2 leads to:
ωl−2 =1
2δt(3δθl−1 − δθl) (5.80)
ωl−2 =1
δt2(δθl − δθl−1) (5.81)
Using (5.80) and (5.81) in (5.77) provides the following estimated quantities:
ωl−2 =3 δθl−1 − δθl
∆t(5.82)
ωl−1 =δθl−1 + δθl
∆t(5.83)
ωl =3 δθl − δθl−1
∆t(5.84)
Following the same procedure for the accelerometer measurements yields:
fl−2 ∆t = 3 δvl−1 − δvl (5.85)
fl−1 ∆t = δvl−1 + δvl (5.86)
fl ∆t = 3 δvl − δvl−1 (5.87)
5.2.2.1 Analysis of Integration Algorithm Accuracy
The algorithm errors are a function of the integration step size and ve-
hicle dynamics. It is desirable to choose an integration step size that results in
errors that are much smaller than the incoming measured data. The algorithm
errors for both the attitude and velocity integration algorithms are examined
in this section.
100
The angular error per unit time for the Runge-Kutta algorithm can be
approximated by: [22]
δω ≈ ωm+1 ∆tm+1
(m + 1)!(5.88)
where m is the order of the algorithm. At the ISS orbit, the angular rate of
the body frame with respect to the inertial frame is 0.0011 rad/s. With a ∆t=
1 s and a fourth-order algorithm, the angular rate error is 3.23×10−12 deg/hr,
which is well below the SIGI gyro bias of 0.0035 deg/hr.
The acceleration error for the integration algorithm can be approxi-
mated by: [22]
δa ≈ ωm a ∆tm
(m + 1)!(5.89)
During the rendezvous scenario, the largest non-gravitational acceler-
ation is due to thrust, which is about 0.1 m/s2. With a ∆t= 1 s and a
fourth-order algorithm, the acceleration error is 1.38 × 10−15 m/s2, which is
well below the SIGI accelerometer bias of 30 µg or 2.9×10−5 m/s2. Therefore,
an integration step size of one second is clearly adequate.
5.2.3 State Propagation Models
This section provides the mathematical models used to propagate the
states in the absolute and relative navigation filters.
101

5.2.3.1 Earth Gravity Model
The gravity model used in the absolute and relative navigation filters
includes the effects of the J2 zonal coefficient. Therefore, the gravitational
potential function is:
U =µ
r− µR2
EJ2
[3z2
2r5 − 12r3
](5.90)
and the acceleration due to gravity is given by:
∇U =
−µxr3
[1− 3
2
(µ
RE
)2
J2
(5z2
r2 − 1)]
−µyr3
[1− 3
2
(µ
RE
)2
J2
(5z2
r2 − 1)]
−µzr3
[1− 3
2
(µ
RE
)2
J2
(5z2
r2 − 3)]
(5.91)
5.2.3.2 Atmospheric Drag Model
In the GPS/INS relative navigation filter, it is assumed that the ISS
does not have an INS to measure the effects of atmospheric drag. In the GPS-
only relative navigation filter, neither vehicle can measure the effects of drag.
Therefore, an atmospheric drag model is required. The acceleration due to
atmospheric drag, fdrag, is computed using:
fdrag = −1
2
CDA
mρV 2
rel
Vrel
‖Vrel‖ (5.92)
where CD is the drag coefficient, A is the reference surface area, m is the mass.
The atmospheric density, ρ, is computed using an exponential atmospheric
density model, which is described in Vallado [42].
102

The exponential atmospheric density model assumes that the density of
the atmosphere decays exponentially with increasing altitude. It also assumes
a spherically symmetrical distribution of particles, in which the density, ρ,
varies according to:
ρ = ρ0 exp
[−hellp − h0
H
](5.93)
where ρ0 is a reference density, h0 is a reference altitude, hellp is the actual
height above the ellipsoid and H is the scale height. These values come from
the CIRA-72 model, which are presented in Table 5.10.
Table 5.10: Exponential Atmospheric Model [42]
hellp h0 ρ0 H
(km) (km) (kg/m3) (km)
300 - 350 300 2.418× 10−11 53.628
350 - 400 350 9.158× 10−12 53.298
400 - 450 400 3.725× 10−12 58.515
5.2.3.3 Drag Coefficient Correction State
Models of the effects of atmospheric drag in orbit can exhibit large
errors due to variations in the atmosphere. Therefore, an additional state is
needed in the relative navigation filters to account for these errors. The drag
coefficient is modelled as:
CD = (1 + ∆D)CD (5.94)
where ∆D is a scale factor error from a nominal drag coefficient value, CD and
is included in the relative navigation filter state vector. It is modelled as a
103
first-order Gauss-Markov process with the following time constant: [13]
τD = 180000 sec (5.95)
and standard deviation of:
σD = 0.5 (5.96)
5.2.3.4 Gyro and Accelerometer Bias States
The gyro and accelerometer bias states are modelled as first-order
Gauss-Markov processes. The parameters presented in Table 5.8 were used
for the SIGI cases.
5.2.3.5 GPS Receiver Clock States
The GPS receiver clock bias and drift model used in the filter is the
same model used to generate the GPS measurements, which is described in
Section 5.1.3.3.
5.2.3.6 Ionospheric Delay State
The state being estimated by the filter is the ionospheric scale factor,
denoted by ∆IV , where
IV = (1 + ∆IV ) IV (5.97)
and IV represents an average value of IV , whose value is recommended to be
5.2 m by Ebinuma. [13] The ionospheric scale factor state is modelled as a
104

first order Gauss-Markov process with a time constant of:
τIV = 2000 s (5.98)
and standard deviation of
σ∆IV= 0.82 (5.99)
5.2.3.7 URE State
The filter estimates the GPS user range error for each GPS SV. Usually
there would be one state per channel in the GPS receiver to save memory and
computation time, however, for this simulation, there is one state for each
GPS SV in the active constellation.
The user range error for each GPS SV is modelled as a first order
Gauss-Markov process with:
σURE =√
1.22 + 3.22 + 4.52 + 3.362 = 6.57 m (5.100)
and the recommended time constant from Ebinuma is: [13]
τURE = 7200 s (5.101)
5.2.3.8 Integer Ambiguity State
The single-difference integer ambiguity is estimated by the relative nav-
igation filters. Although the ambiguity is an integer, the filter estimates a real
number. Since the integer ambiguity is a fixed constant value while the carrier
105
phase is observed (if no cycle slip occurs), the single-difference integer ambi-
guity is also a fixed constant and is modelled as a random-walk process with
a standard deviation of:[13]
σλN = 0.0002 m (5.102)
A small amount of process noise is given to allow for innovations in the
estimate to occur over time.
5.2.4 Process Noise Covariance
The continuous time process noise covariance matrix is denoted by Q(t).
The values for Q(t) are provided in Chapter 6. The discrete equivalent of the
process noise covariance used in the discrete Kalman filter can be expressed
as:
Qk =
∫ tk+1
tk
Φ (tk+1, τ)G (τ)Q (τ)GT (τ) ΦT (tk+1, τ) dτ (5.103)
Since G(t) and Q(t) are constants and the dynamics are slowly varying,
the following approximation is used:
Qk ≈ Φ (tk+1, tk)GQGT ΦT (tk+1, tk) ∆t (5.104)
In the relative navigation filters, it is assumed that the two spacecraft
are orbiting near each other. Therefore the uncertainties in the spacecraft
dynamics are significantly correlated. If the matrix Qchaser represents the 6×6
covariance matrix for the position and velocity states for the chaser and QISS
106
represents the position and velocity covariance matrix for the ISS, then there
is an off-diagonal block matrix, QAB defined by:
QAB(k, l) = ρQ
√Qchaser(k, l)QISS(k, l) (5.105)
where Q(k, l) represents the kth row and lth column element of the matrix Q
and ρQ is the process noise correlation coefficient.
5.2.5 Measurement Models
The absolute navigation filter processes GPS C/A code pseudorange
measurements. The relative navigation filters process GPS C/A code pseu-
dorange measurements from the chaser and the ISS. The relative navigation
filters also process single difference carrier phase measurements formed by sub-
tracting carrier phase measurements from the ISS from measurements from the
chaser.
While many systems use double differenced measurements to remove
the GPS receiver clock bias, this would reduce the number of measurements
available to the filter. This is especially important when GPS signals can be
blocked. Fortunately, there is no need to use double difference measurements
because the filter can estimate the GPS receiver clock bias.
The measurement update processes a single measurement at a time as
they come in. If there is a carrier phase measurement from both vehicles with
the same time tag and using the same GPS SV, the single difference carrier
phase measurement is formed and processed. The relative navigation filters
107
do not enforce any common satellite requirement. Furthermore, it is assumed
that there is no delay in receiving or processing measurements from the ISS
by the chaser.
The measured range from the j th GPS satellite to the vehicle at time
tk can be represented by the following non-linear equation:
zj(tk) = hj(x, tk) + v(tk) (5.106)
where v(tk) is a zero-mean, white Gaussian noise process of strength R repre-
senting random range measurement noise. The linearized scalar measurements
presented to the filter are:
δzj(tk) = zj(tk)− hj(x, tk) (5.107)
The measurement model for C/A code pseudorange measurements is:
hj (x, tk) = ρ +
(1− ρ
c
)bc + ∆URE + ∆iono (5.108)
and for single difference carrier phase measurements is:
hj (x, tk) = ρ +
(1− ρchaser
c
)bcchaser
−(
1− ρISS
c
)bcISS
+ λN (5.109)
5.2.5.1 Measurement Noise Covariance
The C/A code pseudorange and carrier phase range measurement er-
rors are assumed to be zero-mean, white Gaussian random numbers with the
108

following standard deviations:
σεpr = 2.0 m (5.110)
σεcp = 0.02 m (5.111)
Since the measurements are presented to the filter one at a time, the
measurement noise covariance is a scalar. For pseudorange measurements:
Rk = σ2εpr
(5.112)
and for single difference carrier phase measurements:
Rk = σ2εcp
(5.113)
5.2.6 GPS/INS Absolute Navigation Filter
The states estimated by the GPS/INS absolute navigation filter are
shown in Table 5.11.
Table 5.11: GPS/INS Absolute Navigation Filter States
Description Number Symbol
of States
ECI Position Error 3 r
ECI Velocity Error 3 v
Attitude Quaternion Error 4 q
Gyro Biases 3 bG
Accelerometer Biases 3 bA
GPS Receiver Clock Bias 1 bc
GPS Receiver Clock Drift 1 dc
Ionospheric Delay 1 ∆iono
URE Error n ∆URE
109

5.2.7 GPS/INS Relative Navigation Filter
The states estimated by the GPS/INS relative navigation filter are
shown in Table 5.12.
Table 5.12: GPS/INS Relative Navigation Filter States
Description Number Symbol
of States
Chaser ECI Position Error 3 r
Chaser ECI Velocity Error 3 v
Attitude Quaternion Error 4 q
Gyro Biases 3 bG
Accelerometer Biases 3 bA
Chaser GPS Receiver Clock Bias 1 bc
Chaser GPS Receiver Clock Drift 1 dc
Ionospheric Delay 1 ∆iono
URE Error n ∆URE
ISS ECI Position Error 3 r
ISS ECI Velocity Error 3 v
ISS GPS Receiver Clock Bias 1 bc
ISS GPS Receiver Clock Drift 1 dc
ISS Drag Coefficient 1 ∆D
Integer Ambiguities n λN
110

5.2.8 GPS-only Relative Navigation Filter
The states estimated by the GPS-only relative navigation filter are
shown in Table 5.13.
Table 5.13: GPS-only Relative Navigation Filter States
Description Number Symbol
of States
Chaser ECI Position Error 3 r
Chaser ECI Velocity Error 3 v
Chaser GPS Receiver Clock Bias 1 bc
Chaser GPS Receiver Clock Drift 1 dc
Chaser Drag Coefficient 1 ∆D
Ionospheric Delay 1 ∆iono
URE Error n ∆URE
ISS ECI Position Error 3 r
ISS ECI Velocity Error 3 v
ISS GPS Receiver Clock Bias 1 bc
ISS GPS Receiver Clock Drift 1 dc
ISS Drag Coefficient 1 ∆D
Integer Ambiguities n λN
111
Chapter 6
GPS/INS Simulation Results
The results of simulation runs using the absolute navigation filters and
relative navigation filters are discussed in this chapter.
6.1 Absolute Navigation
When a spacecraft is not in close proximity to any other spacecraft,
accurate absolute navigation may be required in order to perform a de-orbit
maneuver or to satisfy other mission objectives. Therefore, a brief discussion
of the results of the GPS/INS absolute navigation filter runs is presented in
this section.
6.1.1 C/A Code vs. Carrier Phase Measurements
The decision of whether to use C/A code or carrier phase measurements
was addressed early in the design process using a preliminary version of the
GPS/INS simulation. In this version, both the chaser and ISS are moving in
a two-body gravity field with no other forces acting. The chaser is initially
placed on a trajectory designed to rendezvous the ISS in a simple two-impulse
rendezvous scenario. The simulation begins just after the first impulse and
112
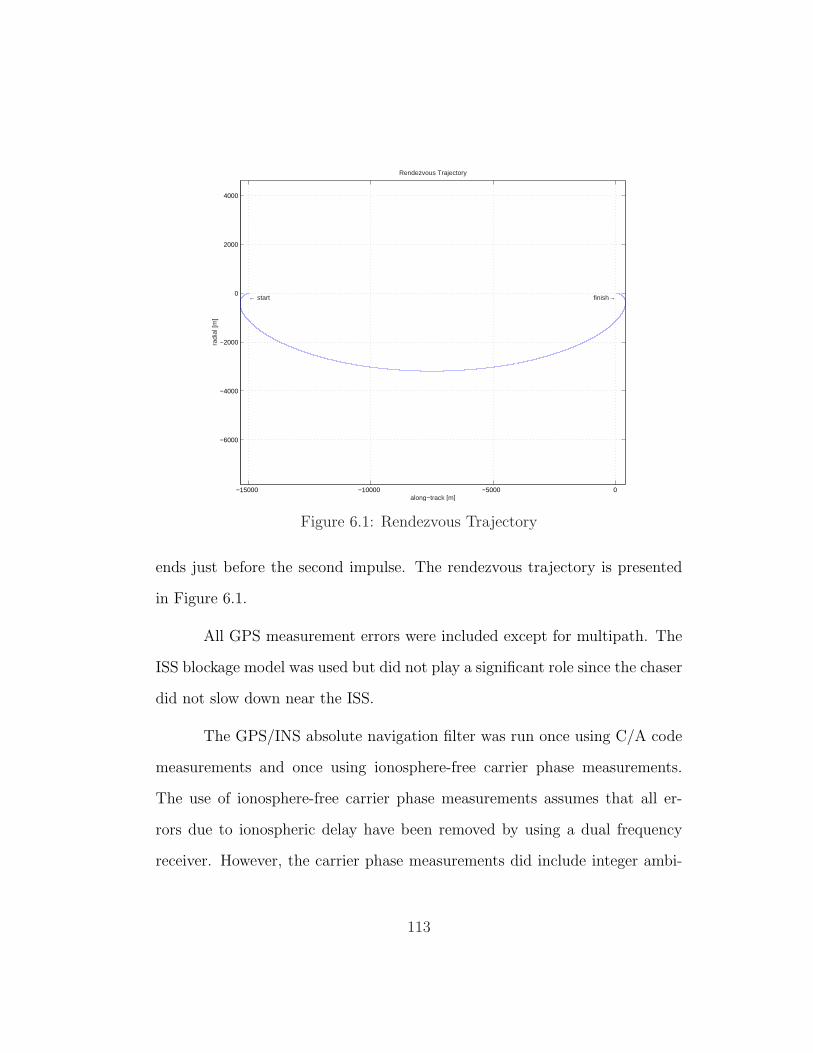
−15000 −10000 −5000 0
−6000
−4000
−2000
0
2000
4000
along−track [m]
radi
al [m
]
← start finish→
Rendezvous Trajectory
Figure 6.1: Rendezvous Trajectory
ends just before the second impulse. The rendezvous trajectory is presented
in Figure 6.1.
All GPS measurement errors were included except for multipath. The
ISS blockage model was used but did not play a significant role since the chaser
did not slow down near the ISS.
The GPS/INS absolute navigation filter was run once using C/A code
measurements and once using ionosphere-free carrier phase measurements.
The use of ionosphere-free carrier phase measurements assumes that all er-
rors due to ionospheric delay have been removed by using a dual frequency
receiver. However, the carrier phase measurements did include integer ambi-
113

guities, which were estimated by the modified GPS/INS absolute navigation
filter. The results of both runs are shown in Figures 6.2 and 6.3.
These runs show that although carrier phase measurements are more
precise than C/A code measurements, the GPS/INS filter is not able to esti-
mate the integers well enough to take advantage of the carrier phase measure-
ment precision. Therefore, the use of carrier phase measurements for absolute
navigation provides little additional information, since additional states are
required to estimate the integers. For this reason, the absolute navigation
filter was designed to use pseudorange measurements for this application.
0 1000 2000 3000 4000 5000 6000−10
−5
0
5
10
x er
ror
[m]
ECI Position Errors
C/A CodeCarrier Phase
0 1000 2000 3000 4000 5000 6000−10
−5
0
5
10
y er
ror
[m]
0 1000 2000 3000 4000 5000 6000−10
−5
0
5
10
time [s]
z er
ror
[m]
Figure 6.2: Comparision of Absolute Position Errors Using C/A Code andCarrier Phase Measurements
114
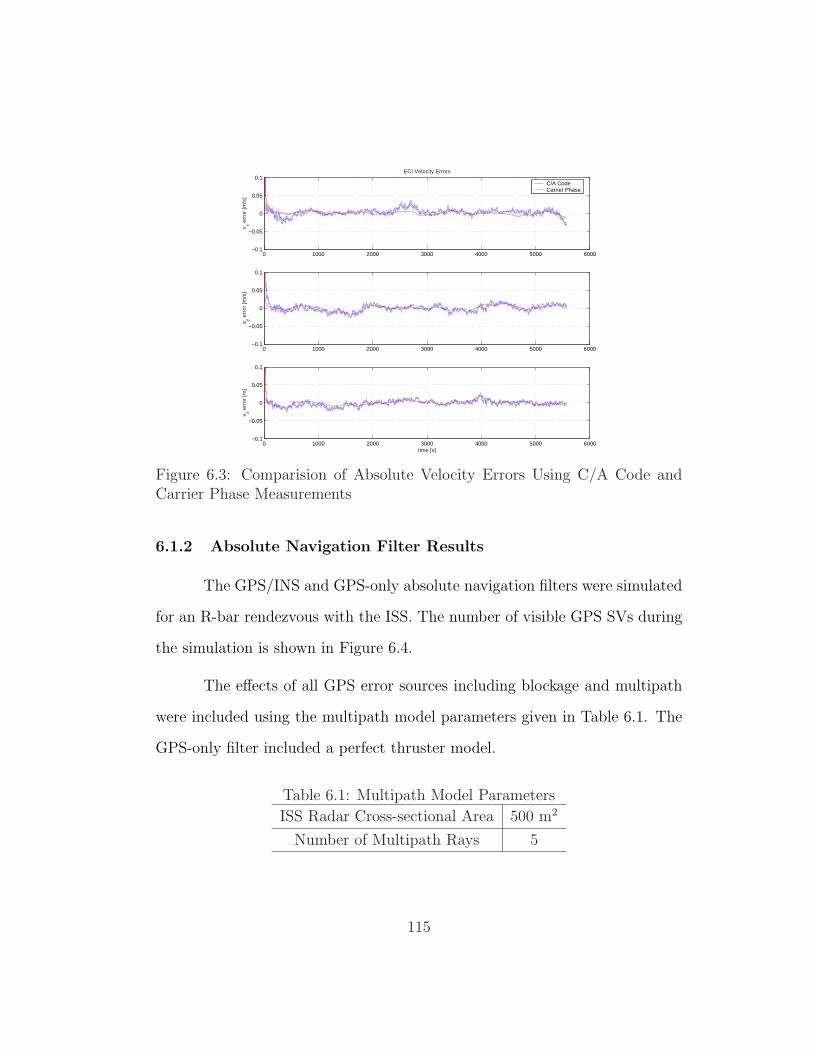
0 1000 2000 3000 4000 5000 6000−0.1
−0.05
0
0.05
0.1
v x err
or [m
/s]
ECI Velocity Errors
C/A CodeCarrier Phase
0 1000 2000 3000 4000 5000 6000−0.1
−0.05
0
0.05
0.1
v y err
or [m
/s]
0 1000 2000 3000 4000 5000 6000−0.1
−0.05
0
0.05
0.1
time [s]
v z err
or [m
]
Figure 6.3: Comparision of Absolute Velocity Errors Using C/A Code andCarrier Phase Measurements
6.1.2 Absolute Navigation Filter Results
The GPS/INS and GPS-only absolute navigation filters were simulated
for an R-bar rendezvous with the ISS. The number of visible GPS SVs during
the simulation is shown in Figure 6.4.
The effects of all GPS error sources including blockage and multipath
were included using the multipath model parameters given in Table 6.1. The
GPS-only filter included a perfect thruster model.
Table 6.1: Multipath Model Parameters
ISS Radar Cross-sectional Area 500 m2
Number of Multipath Rays 5
115
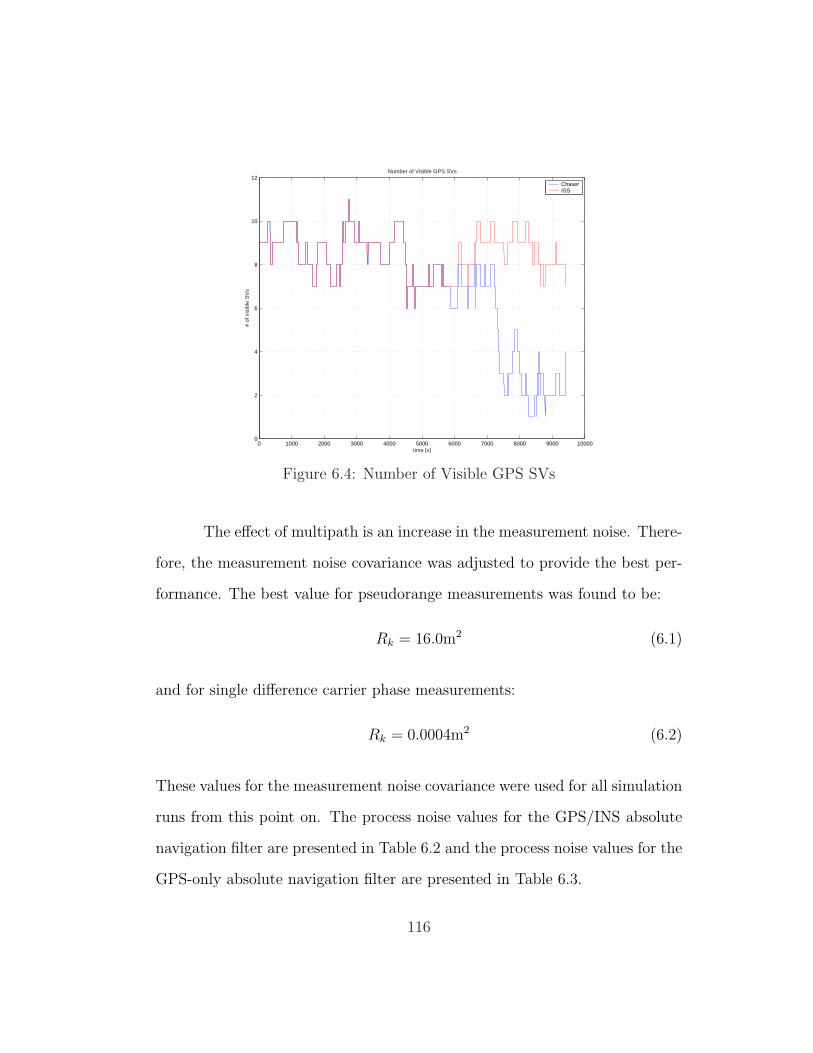
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
12
time [s]
# of
vis
ible
SV
s
Number of Visible GPS SVs
ChaserISS
Figure 6.4: Number of Visible GPS SVs
The effect of multipath is an increase in the measurement noise. There-
fore, the measurement noise covariance was adjusted to provide the best per-
formance. The best value for pseudorange measurements was found to be:
Rk = 16.0m2 (6.1)
and for single difference carrier phase measurements:
Rk = 0.0004m2 (6.2)
These values for the measurement noise covariance were used for all simulation
runs from this point on. The process noise values for the GPS/INS absolute
navigation filter are presented in Table 6.2 and the process noise values for the
GPS-only absolute navigation filter are presented in Table 6.3.
116

Table 6.2: GPS/INS Absolute Navigation Filter Process Noise
State Process Noise
ECI Velocity Error 1.0×10−6 m2/s3
Attitude Quaternion Error 3.6×10−6
Gyro Biases 2σ2G/τG
Accelerometer Biases 2σ2A/τA
GPS Receiver Clock Bias Sf
GPS Receiver Clock Drift Sg
Ionospheric Delay 2σ2IV /τIV
URE Error 2σ2URE/τURE
Table 6.3: GPS-Only Absolute Navigation Filter Process Noise
State Process Noise
ECI Velocity Error 1.0×10−6 m2/s3
Drag Coefficient 2σ2D/τD
GPS Receiver Clock Bias Sf
GPS Receiver Clock Drift Sg
Ionospheric Delay 2σ2IV /τIV
URE Error 2σ2URE/τURE
The results from the GPS/INS absolute navigation filter using SIGI
sensors are shown in Figures 6.5 through 6.12. The results from the GPS-only
absolute navigation filter using a perfect thruster model are shown in Figures
6.13 through 6.17.
117
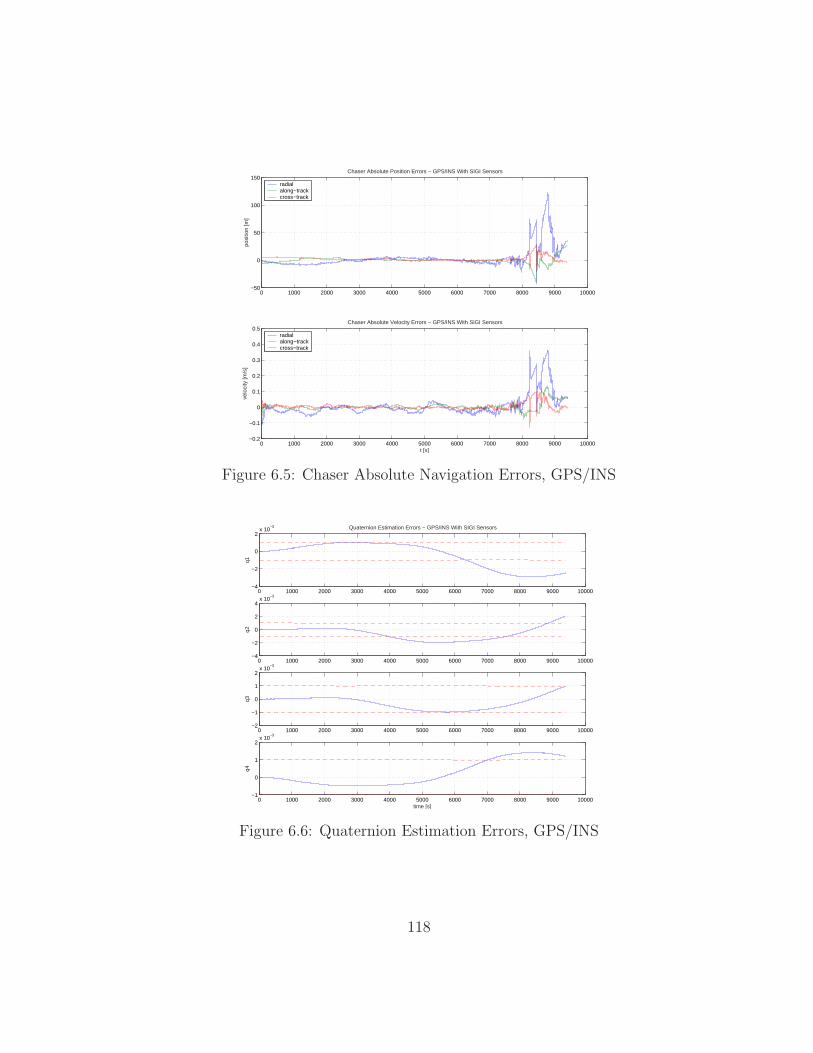
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−50
0
50
100
150
posi
tion
[m]
Chaser Absolute Position Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
t [s]
velo
city
[m/s
]
Chaser Absolute Velocity Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
Figure 6.5: Chaser Absolute Navigation Errors, GPS/INS
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−4
−2
0
2x 10
−3
q1
Quaternion Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−4
−2
0
2
4x 10
−3
q2
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
q3
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
0
1
2x 10
−3
time [s]
q4
Figure 6.6: Quaternion Estimation Errors, GPS/INS
118
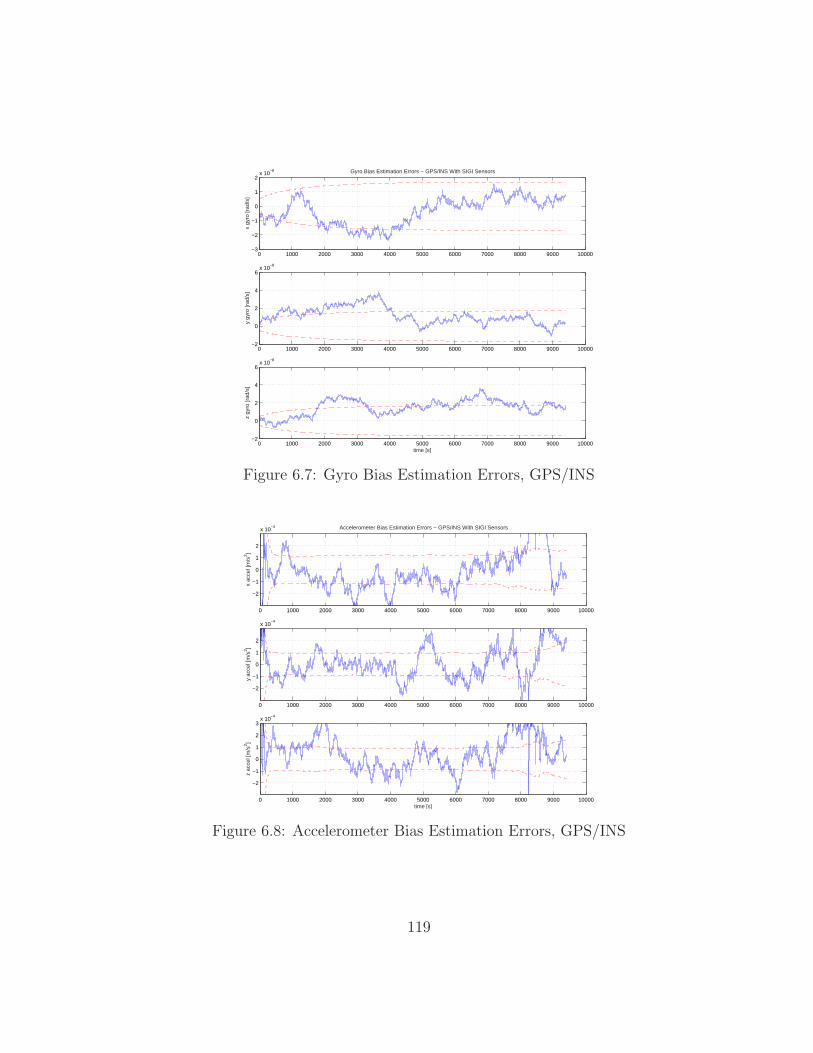
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−3
−2
−1
0
1
2x 10
−8
x gy
ro [r
ad/s
]
Gyro Bias Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
0
2
4
6x 10
−8
y gy
ro [r
ad/s
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
0
2
4
6x 10
−8
time [s]
z gy
ro [r
ad/s
]
Figure 6.7: Gyro Bias Estimation Errors, GPS/INS
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
−2
−1
0
1
2
x 10−4
x ac
cel [
m/s
2 ]
Accelerometer Bias Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
−2
−1
0
1
2
x 10−4
y ac
cel [
m/s
2 ]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
−2
−1
0
1
2
3x 10
−4
time [s]
z ac
cel [
m/s
2 ]
Figure 6.8: Accelerometer Bias Estimation Errors, GPS/INS
119
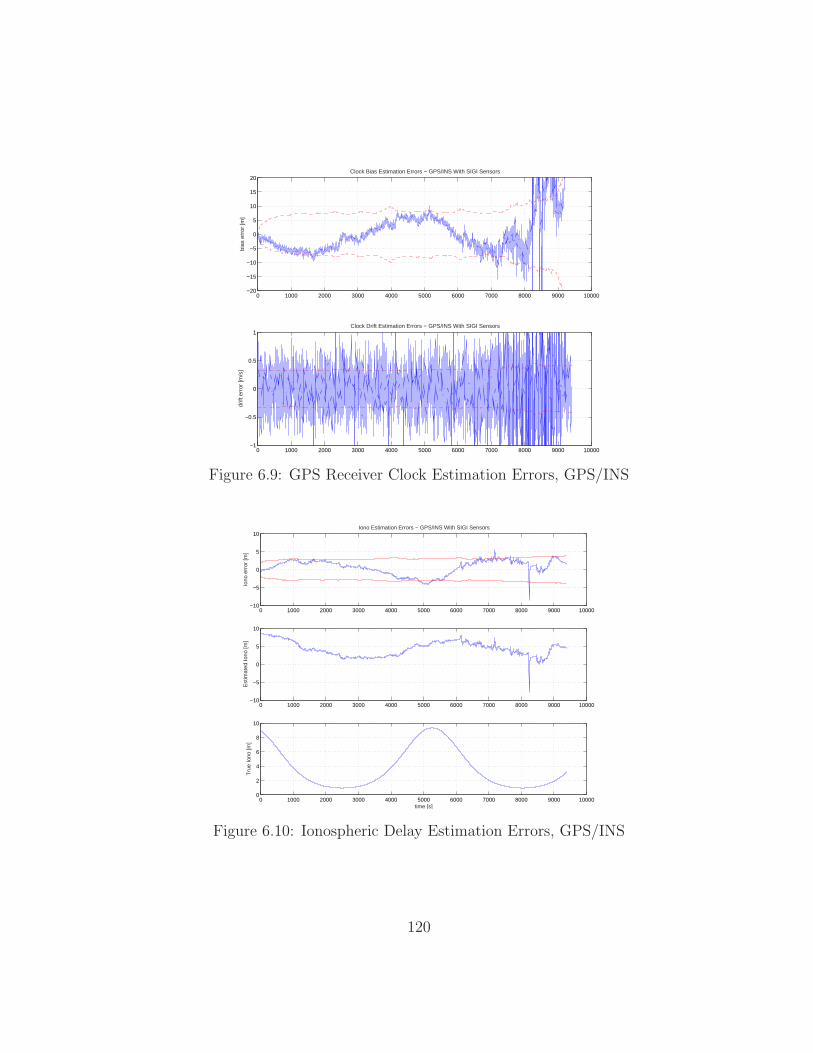
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−20
−15
−10
−5
0
5
10
15
20
bias
err
or [m
]
Clock Bias Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1
drift
err
or [m
/s]
Clock Drift Estimation Errors − GPS/INS With SIGI Sensors
Figure 6.9: GPS Receiver Clock Estimation Errors, GPS/INS
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
Iono
err
or [m
]
Iono Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
Est
imat
ed Io
no [m
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
time [s]
Tru
e Io
no [m
]
Figure 6.10: Ionospheric Delay Estimation Errors, GPS/INS
120
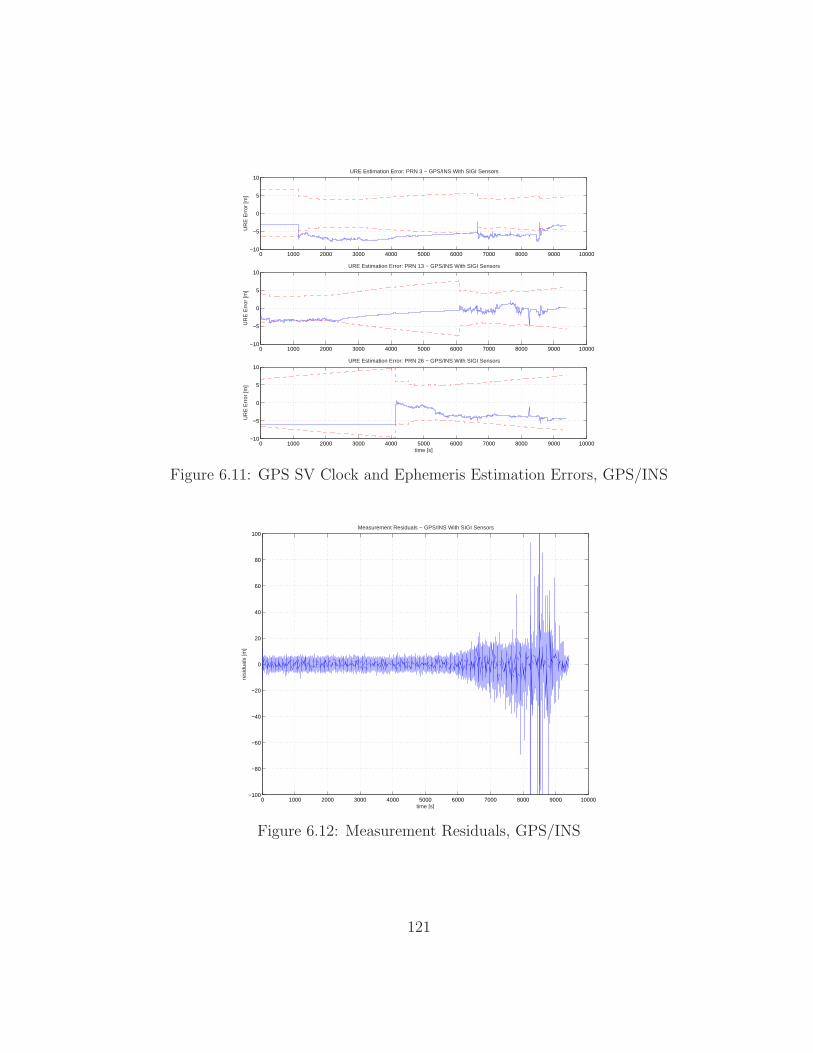
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
UR
E E
rror
[m]
URE Estimation Error: PRN 3 − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
UR
E E
rror
[m]
URE Estimation Error: PRN 13 − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
time [s]
UR
E E
rror
[m]
URE Estimation Error: PRN 26 − GPS/INS With SIGI Sensors
Figure 6.11: GPS SV Clock and Ephemeris Estimation Errors, GPS/INS
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−100
−80
−60
−40
−20
0
20
40
60
80
100
time [s]
resi
dual
s [m
]
Measurement Residuals − GPS/INS With SIGI Sensors
Figure 6.12: Measurement Residuals, GPS/INS
121
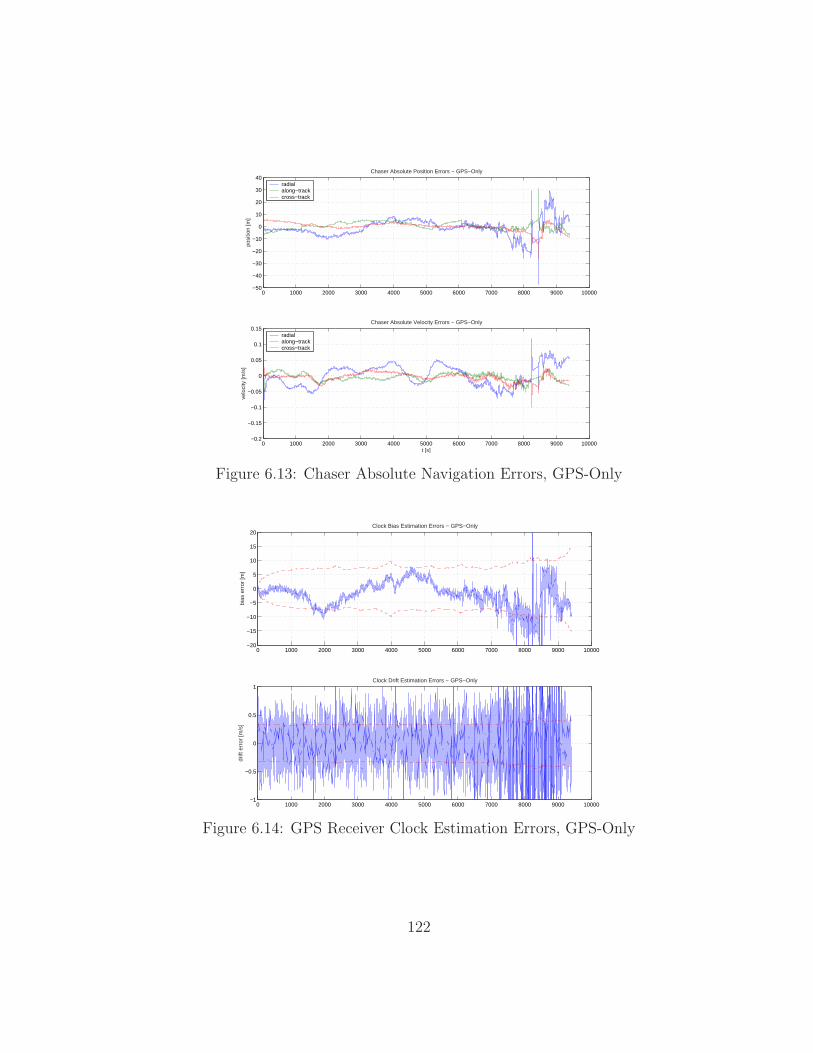
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−50
−40
−30
−20
−10
0
10
20
30
40
posi
tion
[m]
Chaser Absolute Position Errors − GPS−Only
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
t [s]
velo
city
[m/s
]
Chaser Absolute Velocity Errors − GPS−Only
radialalong−trackcross−track
Figure 6.13: Chaser Absolute Navigation Errors, GPS-Only
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−20
−15
−10
−5
0
5
10
15
20
bias
err
or [m
]
Clock Bias Estimation Errors − GPS−Only
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1
drift
err
or [m
/s]
Clock Drift Estimation Errors − GPS−Only
Figure 6.14: GPS Receiver Clock Estimation Errors, GPS-Only
122
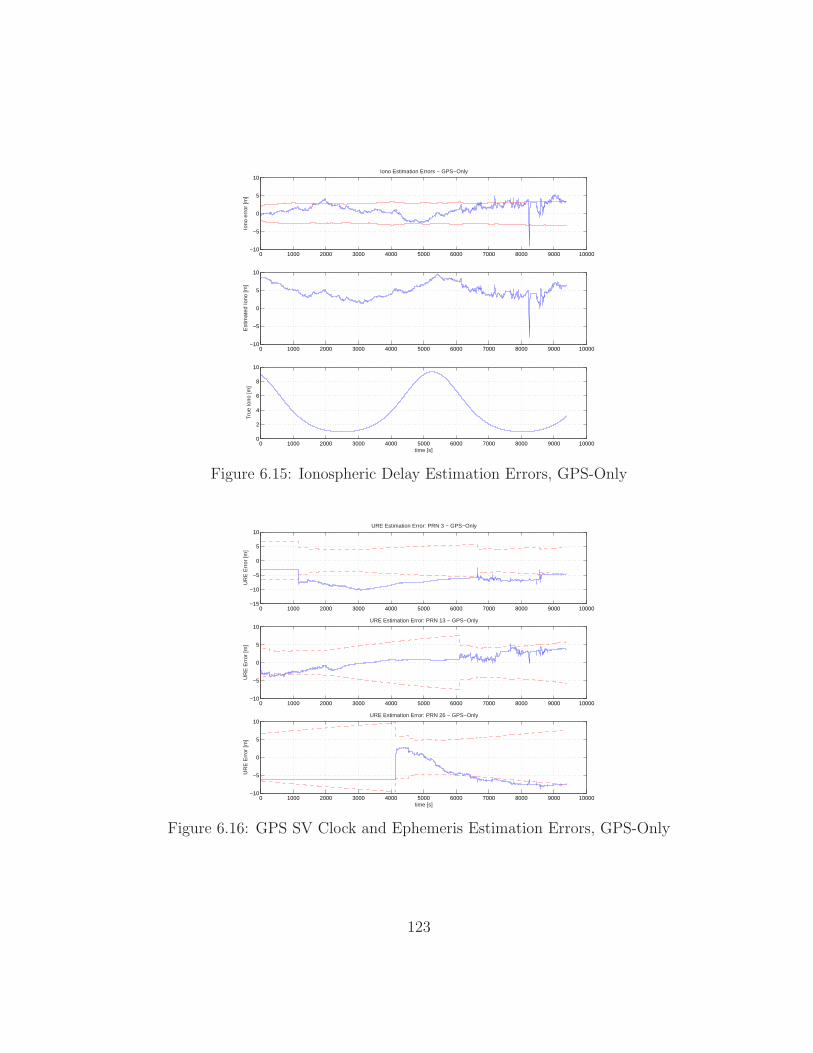
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
Iono
err
or [m
]
Iono Estimation Errors − GPS−Only
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
Est
imat
ed Io
no [m
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
time [s]
Tru
e Io
no [m
]
Figure 6.15: Ionospheric Delay Estimation Errors, GPS-Only
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−15
−10
−5
0
5
10
UR
E E
rror
[m]
URE Estimation Error: PRN 3 − GPS−Only
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
UR
E E
rror
[m]
URE Estimation Error: PRN 13 − GPS−Only
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
time [s]
UR
E E
rror
[m]
URE Estimation Error: PRN 26 − GPS−Only
Figure 6.16: GPS SV Clock and Ephemeris Estimation Errors, GPS-Only
123
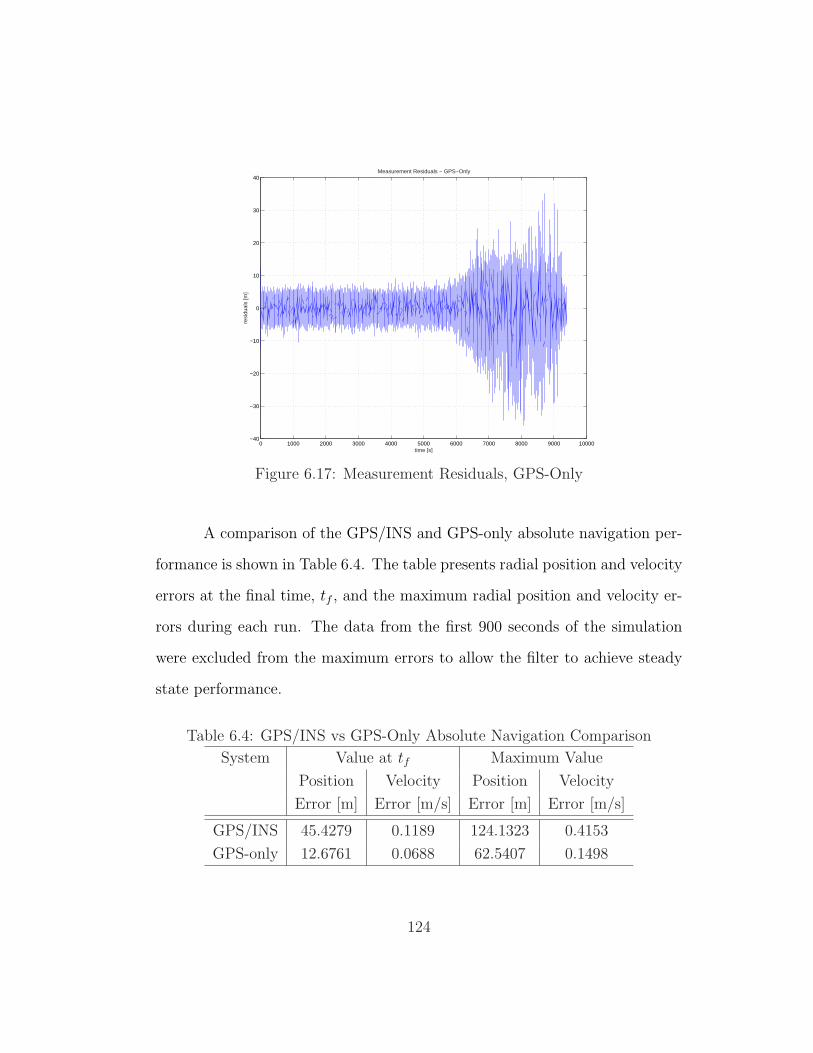
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−40
−30
−20
−10
0
10
20
30
40
time [s]
resi
dual
s [m
]
Measurement Residuals − GPS−Only
Figure 6.17: Measurement Residuals, GPS-Only
A comparison of the GPS/INS and GPS-only absolute navigation per-
formance is shown in Table 6.4. The table presents radial position and velocity
errors at the final time, tf , and the maximum radial position and velocity er-
rors during each run. The data from the first 900 seconds of the simulation
were excluded from the maximum errors to allow the filter to achieve steady
state performance.
Table 6.4: GPS/INS vs GPS-Only Absolute Navigation Comparison
System Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
GPS/INS 45.4279 0.1189 124.1323 0.4153
GPS-only 12.6761 0.0688 62.5407 0.1498
124
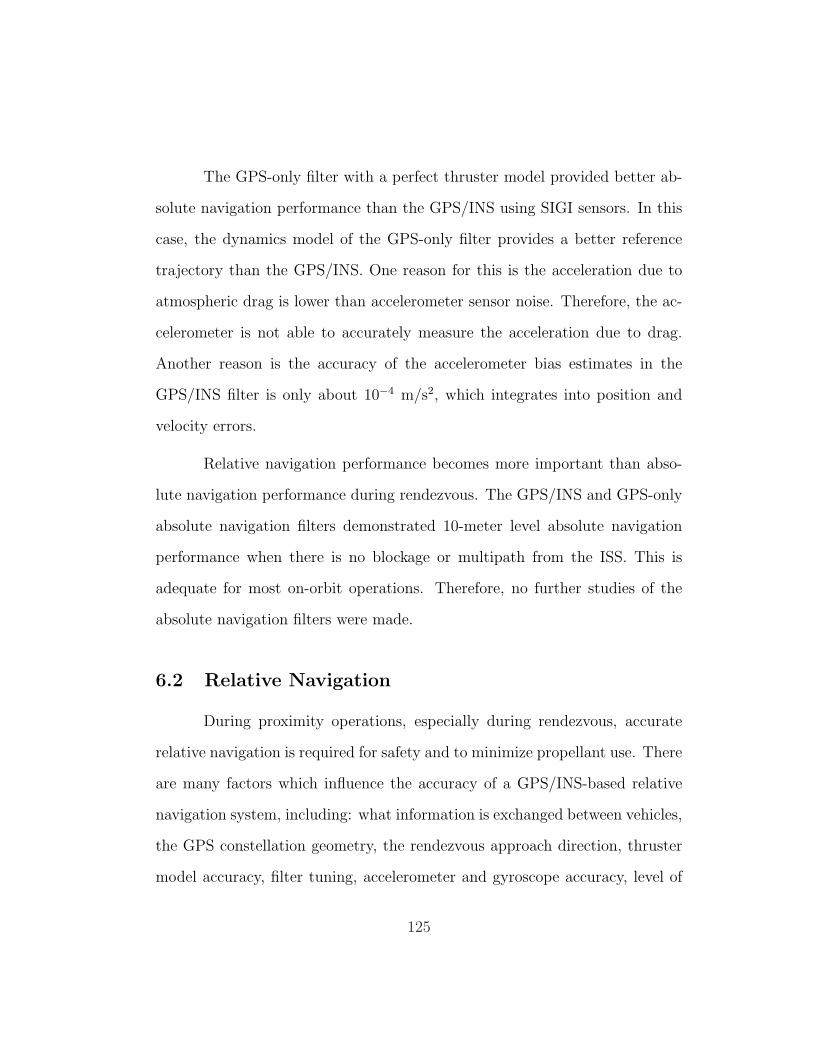
The GPS-only filter with a perfect thruster model provided better ab-
solute navigation performance than the GPS/INS using SIGI sensors. In this
case, the dynamics model of the GPS-only filter provides a better reference
trajectory than the GPS/INS. One reason for this is the acceleration due to
atmospheric drag is lower than accelerometer sensor noise. Therefore, the ac-
celerometer is not able to accurately measure the acceleration due to drag.
Another reason is the accuracy of the accelerometer bias estimates in the
GPS/INS filter is only about 10−4 m/s2, which integrates into position and
velocity errors.
Relative navigation performance becomes more important than abso-
lute navigation performance during rendezvous. The GPS/INS and GPS-only
absolute navigation filters demonstrated 10-meter level absolute navigation
performance when there is no blockage or multipath from the ISS. This is
adequate for most on-orbit operations. Therefore, no further studies of the
absolute navigation filters were made.
6.2 Relative Navigation
During proximity operations, especially during rendezvous, accurate
relative navigation is required for safety and to minimize propellant use. There
are many factors which influence the accuracy of a GPS/INS-based relative
navigation system, including: what information is exchanged between vehicles,
the GPS constellation geometry, the rendezvous approach direction, thruster
model accuracy, filter tuning, accelerometer and gyroscope accuracy, level of
125
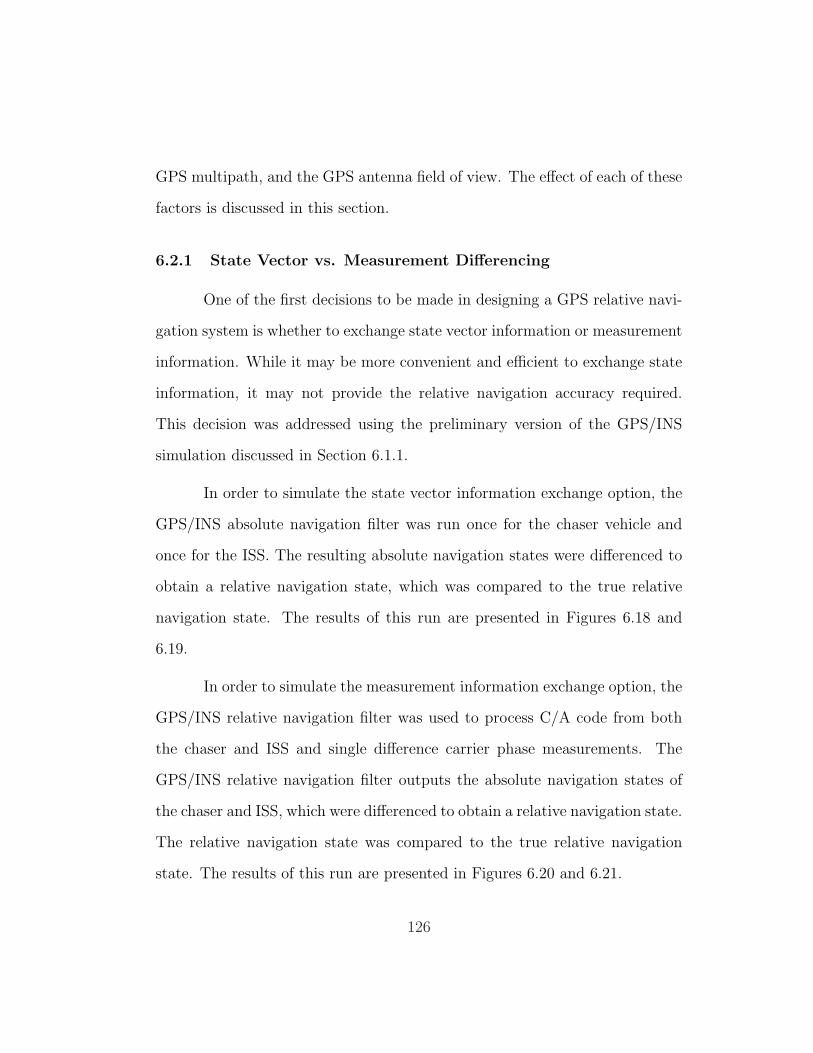
GPS multipath, and the GPS antenna field of view. The effect of each of these
factors is discussed in this section.
6.2.1 State Vector vs. Measurement Differencing
One of the first decisions to be made in designing a GPS relative navi-
gation system is whether to exchange state vector information or measurement
information. While it may be more convenient and efficient to exchange state
information, it may not provide the relative navigation accuracy required.
This decision was addressed using the preliminary version of the GPS/INS
simulation discussed in Section 6.1.1.
In order to simulate the state vector information exchange option, the
GPS/INS absolute navigation filter was run once for the chaser vehicle and
once for the ISS. The resulting absolute navigation states were differenced to
obtain a relative navigation state, which was compared to the true relative
navigation state. The results of this run are presented in Figures 6.18 and
6.19.
In order to simulate the measurement information exchange option, the
GPS/INS relative navigation filter was used to process C/A code from both
the chaser and ISS and single difference carrier phase measurements. The
GPS/INS relative navigation filter outputs the absolute navigation states of
the chaser and ISS, which were differenced to obtain a relative navigation state.
The relative navigation state was compared to the true relative navigation
state. The results of this run are presented in Figures 6.20 and 6.21.
126
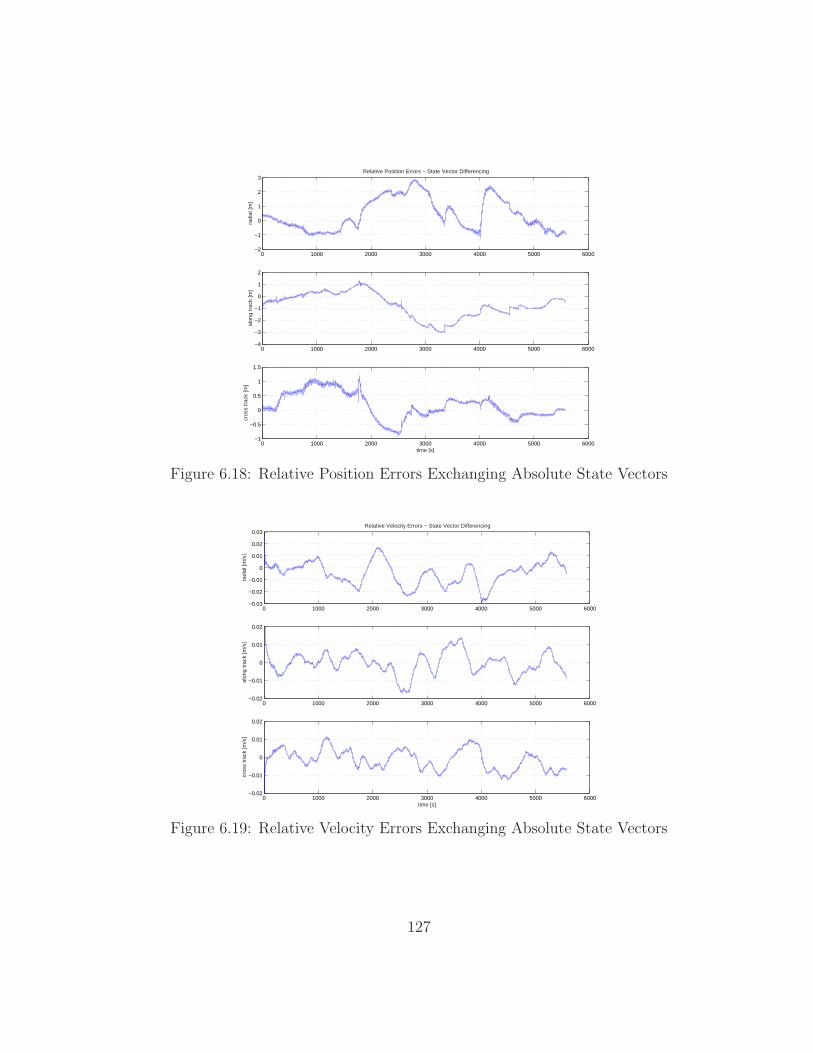
0 1000 2000 3000 4000 5000 6000−2
−1
0
1
2
3
radi
al [m
]
Relative Position Errors − State Vector Differencing
0 1000 2000 3000 4000 5000 6000−4
−3
−2
−1
0
1
2
alon
g tr
ack
[m]
0 1000 2000 3000 4000 5000 6000−1
−0.5
0
0.5
1
1.5
time [s]
cros
s tr
ack
[m]
Figure 6.18: Relative Position Errors Exchanging Absolute State Vectors
0 1000 2000 3000 4000 5000 6000−0.03
−0.02
−0.01
0
0.01
0.02
0.03
radi
al [m
/s]
Relative Velocity Errors − State Vector Differencing
0 1000 2000 3000 4000 5000 6000−0.02
−0.01
0
0.01
0.02
alon
g tr
ack
[m/s
]
0 1000 2000 3000 4000 5000 6000−0.02
−0.01
0
0.01
0.02
time [s]
cros
s tr
ack
[m/s
]
Figure 6.19: Relative Velocity Errors Exchanging Absolute State Vectors
127
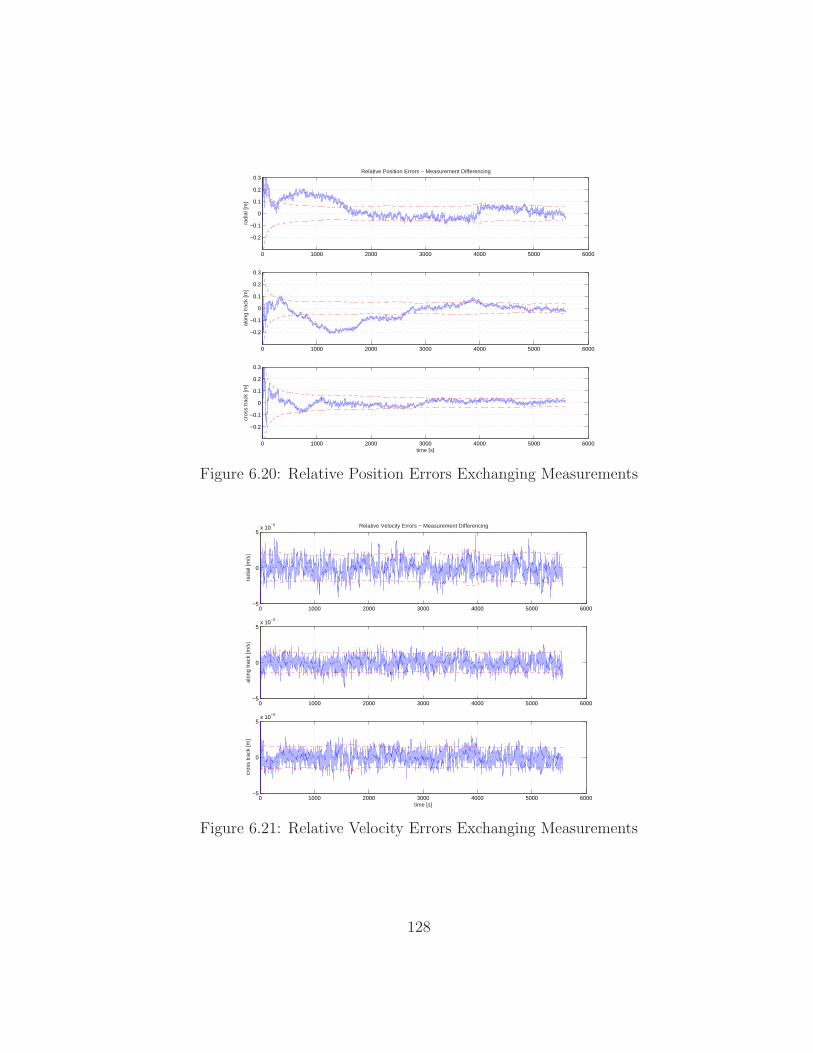
0 1000 2000 3000 4000 5000 6000
−0.2
−0.1
0
0.1
0.2
0.3
radi
al [m
]
Relative Position Errors − Measurement Differencing
0 1000 2000 3000 4000 5000 6000
−0.2
−0.1
0
0.1
0.2
0.3
alon
g tr
ack
[m]
0 1000 2000 3000 4000 5000 6000
−0.2
−0.1
0
0.1
0.2
0.3
time [s]
cros
s tr
ack
[m]
Figure 6.20: Relative Position Errors Exchanging Measurements
0 1000 2000 3000 4000 5000 6000−5
0
5x 10
−3
radi
al [m
/s]
Relative Velocity Errors − Measurement Differencing
0 1000 2000 3000 4000 5000 6000−5
0
5x 10
−3
alon
g tr
ack
[m/s
]
0 1000 2000 3000 4000 5000 6000−5
0
5x 10
−3
time [s]
cros
s tr
ack
[m]
Figure 6.21: Relative Velocity Errors Exchanging Measurements
128

By comparing the results shown in Figures 6.18 and 6.19 with those in
Figures 6.20 and 6.21, it can be seen that the measurement exchange approach
yields approximately an order of magnitude improvement in accuracy over the
state vector exchange approach. Since proximity operations require the highest
accuracy possible, the measurement exchange approach was selected.
The improved accuracy of the relative navigation state obtained using
the measurement exchange approach is achieved by processing single differ-
ence carrier phase measurements. These measurements provide very accurate
information on the relative position of the vehicles since the errors due to
ionospheric delay and GPS SV clock and ephemeris errors are removed in the
single difference process.
In both cases, there was no simulation of data dropouts or data trans-
mission delays. These issues would have to be addressed in the design of an
relative navigation system regardless of which information exchange approach
was chosen.
One benefit of scalar measurement processing used in the GPS/INS
and GPS-only relative navigation filters is that if there are data dropouts due
to communication link problems, the filter would continue to process the local
measurements to improve the absolute navigation state of the local vehicle.
6.2.2 Addition of a Thrust Model in GPS-Only Filter
The dynamics model of the GPS-only filter initially included the effects
of gravity including the J2 effect and atmospheric drag. Any thruster activity
129
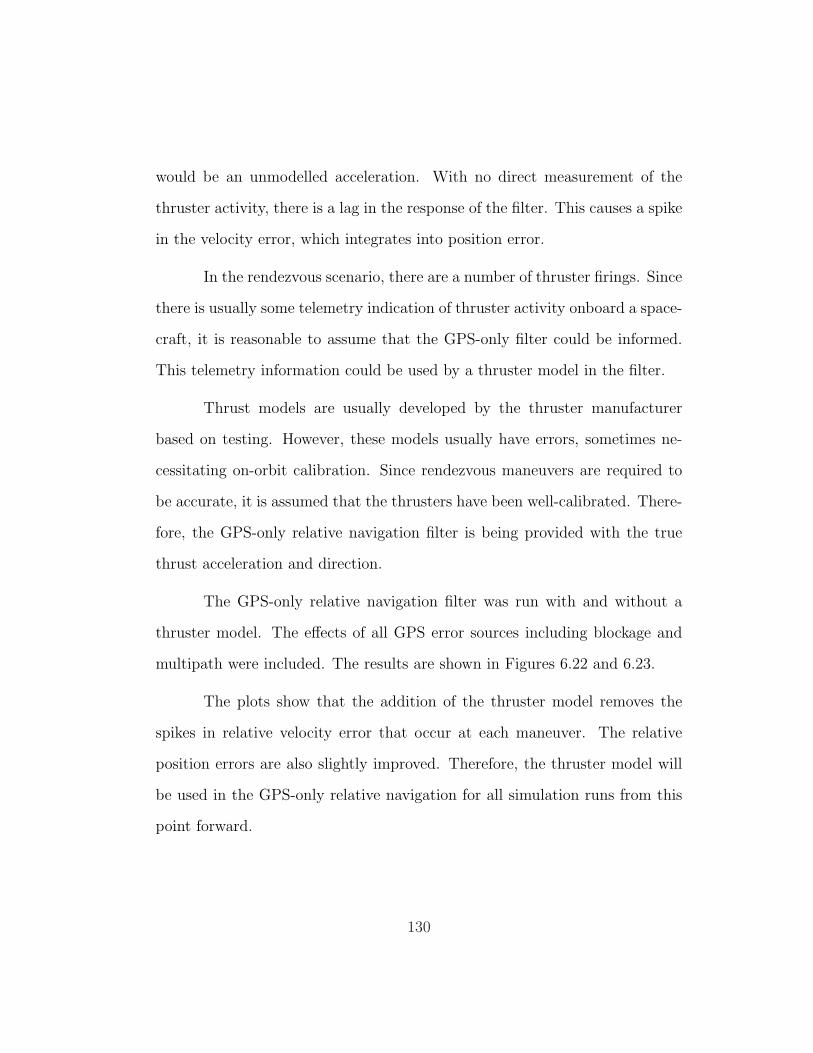
would be an unmodelled acceleration. With no direct measurement of the
thruster activity, there is a lag in the response of the filter. This causes a spike
in the velocity error, which integrates into position error.
In the rendezvous scenario, there are a number of thruster firings. Since
there is usually some telemetry indication of thruster activity onboard a space-
craft, it is reasonable to assume that the GPS-only filter could be informed.
This telemetry information could be used by a thruster model in the filter.
Thrust models are usually developed by the thruster manufacturer
based on testing. However, these models usually have errors, sometimes ne-
cessitating on-orbit calibration. Since rendezvous maneuvers are required to
be accurate, it is assumed that the thrusters have been well-calibrated. There-
fore, the GPS-only relative navigation filter is being provided with the true
thrust acceleration and direction.
The GPS-only relative navigation filter was run with and without a
thruster model. The effects of all GPS error sources including blockage and
multipath were included. The results are shown in Figures 6.22 and 6.23.
The plots show that the addition of the thruster model removes the
spikes in relative velocity error that occur at each maneuver. The relative
position errors are also slightly improved. Therefore, the thruster model will
be used in the GPS-only relative navigation for all simulation runs from this
point forward.
130
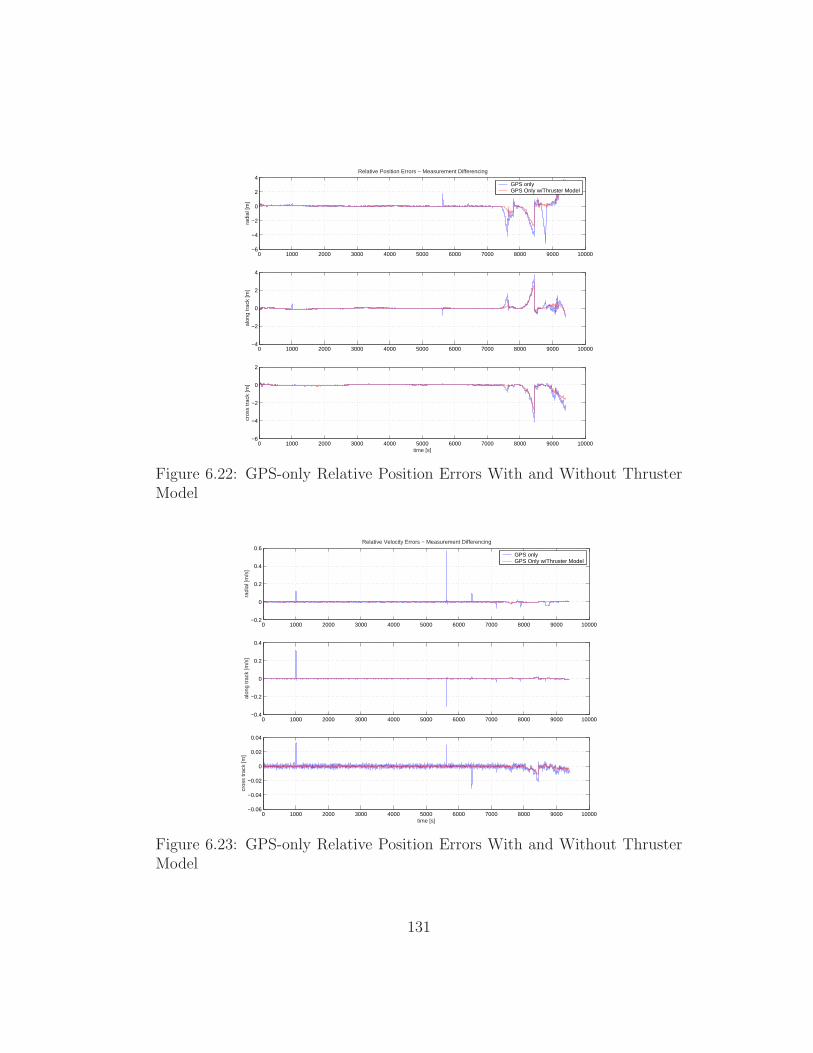
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−6
−4
−2
0
2
4
radi
al [m
]
Relative Position Errors − Measurement Differencing
GPS onlyGPS Only w/Thruster Model
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−4
−2
0
2
4
alon
g tr
ack
[m]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−6
−4
−2
0
2
time [s]
cros
s tr
ack
[m]
Figure 6.22: GPS-only Relative Position Errors With and Without ThrusterModel
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
0
0.2
0.4
0.6
radi
al [m
/s]
Relative Velocity Errors − Measurement Differencing
GPS onlyGPS Only w/Thruster Model
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.4
−0.2
0
0.2
0.4
alon
g tr
ack
[m/s
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.06
−0.04
−0.02
0
0.02
0.04
time [s]
cros
s tr
ack
[m]
Figure 6.23: GPS-only Relative Position Errors With and Without ThrusterModel
131
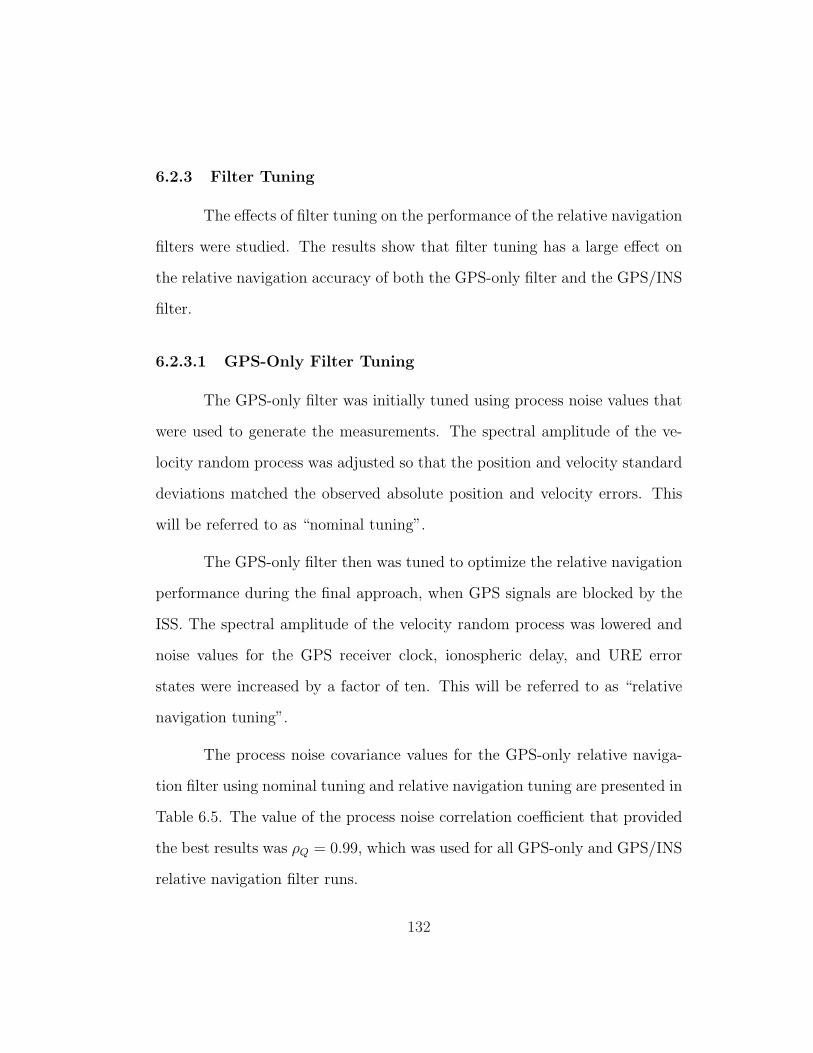
6.2.3 Filter Tuning
The effects of filter tuning on the performance of the relative navigation
filters were studied. The results show that filter tuning has a large effect on
the relative navigation accuracy of both the GPS-only filter and the GPS/INS
filter.
6.2.3.1 GPS-Only Filter Tuning
The GPS-only filter was initially tuned using process noise values that
were used to generate the measurements. The spectral amplitude of the ve-
locity random process was adjusted so that the position and velocity standard
deviations matched the observed absolute position and velocity errors. This
will be referred to as “nominal tuning”.
The GPS-only filter then was tuned to optimize the relative navigation
performance during the final approach, when GPS signals are blocked by the
ISS. The spectral amplitude of the velocity random process was lowered and
noise values for the GPS receiver clock, ionospheric delay, and URE error
states were increased by a factor of ten. This will be referred to as “relative
navigation tuning”.
The process noise covariance values for the GPS-only relative naviga-
tion filter using nominal tuning and relative navigation tuning are presented in
Table 6.5. The value of the process noise correlation coefficient that provided
the best results was ρQ = 0.99, which was used for all GPS-only and GPS/INS
relative navigation filter runs.
132
Table 6.5: GPS-Only Relative Navigation Filter Process Noise
State Nominal Tuning Rel. Nav. Tuning
ECI Velocity Error 1.0×10−6 m2/s3 1.0×10−9 m2/s3
Drag Coefficient 2σ2D/τD 2σ2
D/τD
GPS Receiver Clock Bias Sf 10Sf
GPS Receiver Clock Drift Sg 10Sg
Ionospheric Delay 2σ2IV /τIV 20σ2
IV /τIV
URE Error 2σ2URE/τURE 20σ2
URE/τURE
Integer Ambiguity 2σ2λN/τλN 2σ2
λN/τλN
The results of running the GPS-only filter using nominal tuning are
shown in Figures 6.24 through 6.32. The results of running the GPS-only
filter using relative navigation tuning are shown in Figures 6.33 through 6.41.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−3
−2
−1
0
1
2
3
radi
al [m
]
Relative Position Errors − GPS−only with Thrust Model, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−3
−2
−1
0
1
2
3
alon
g tr
ack
[m]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2
time [s]
cros
s tr
ack
[m]
Figure 6.24: Relative Position Errors, GPS-Only, Nominal Tuning
133
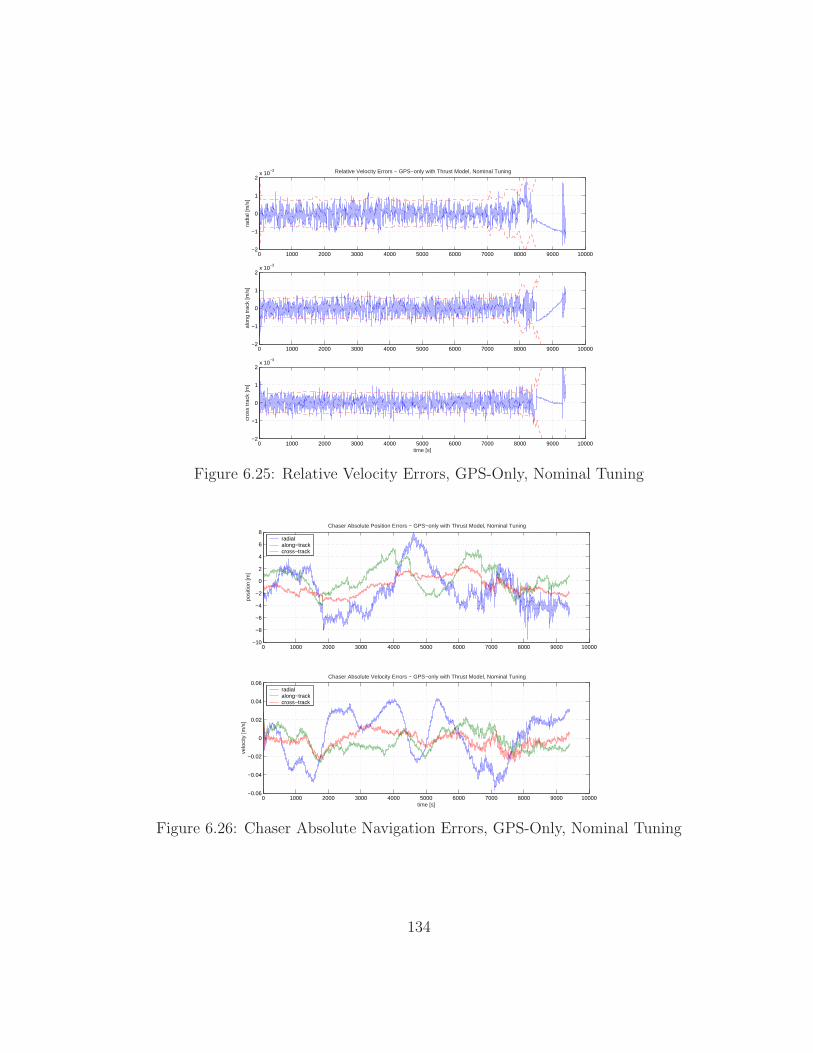
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
radi
al [m
/s]
Relative Velocity Errors − GPS−only with Thrust Model, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
alon
g tr
ack
[m/s
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
time [s]
cros
s tr
ack
[m]
Figure 6.25: Relative Velocity Errors, GPS-Only, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−8
−6
−4
−2
0
2
4
6
8
posi
tion
[m]
Chaser Absolute Position Errors − GPS−only with Thrust Model, Nominal Tuning
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.06
−0.04
−0.02
0
0.02
0.04
0.06
time [s]
velo
city
[m/s
]
Chaser Absolute Velocity Errors − GPS−only with Thrust Model, Nominal Tuning
radialalong−trackcross−track
Figure 6.26: Chaser Absolute Navigation Errors, GPS-Only, Nominal Tuning
134
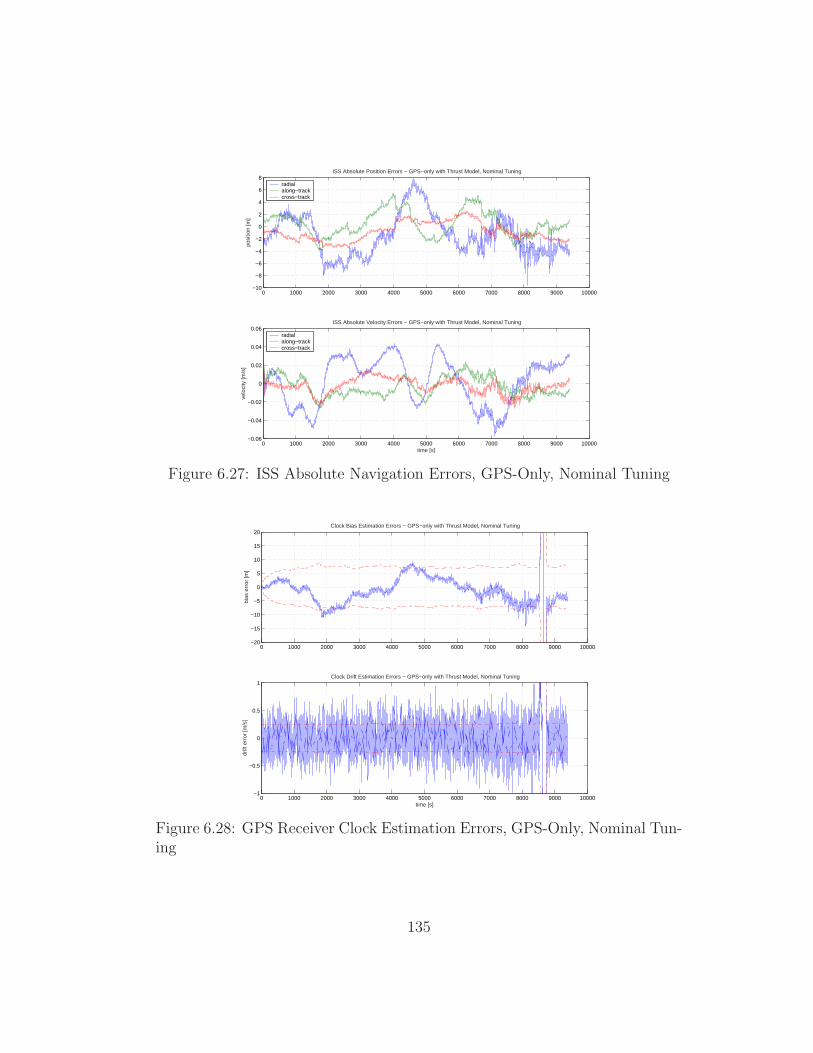
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−8
−6
−4
−2
0
2
4
6
8
posi
tion
[m]
ISS Absolute Position Errors − GPS−only with Thrust Model, Nominal Tuning
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.06
−0.04
−0.02
0
0.02
0.04
0.06
time [s]
velo
city
[m/s
]
ISS Absolute Velocity Errors − GPS−only with Thrust Model, Nominal Tuning
radialalong−trackcross−track
Figure 6.27: ISS Absolute Navigation Errors, GPS-Only, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−20
−15
−10
−5
0
5
10
15
20
bias
err
or [m
]
Clock Bias Estimation Errors − GPS−only with Thrust Model, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1
time [s]
drift
err
or [m
/s]
Clock Drift Estimation Errors − GPS−only with Thrust Model, Nominal Tuning
Figure 6.28: GPS Receiver Clock Estimation Errors, GPS-Only, Nominal Tun-ing
135
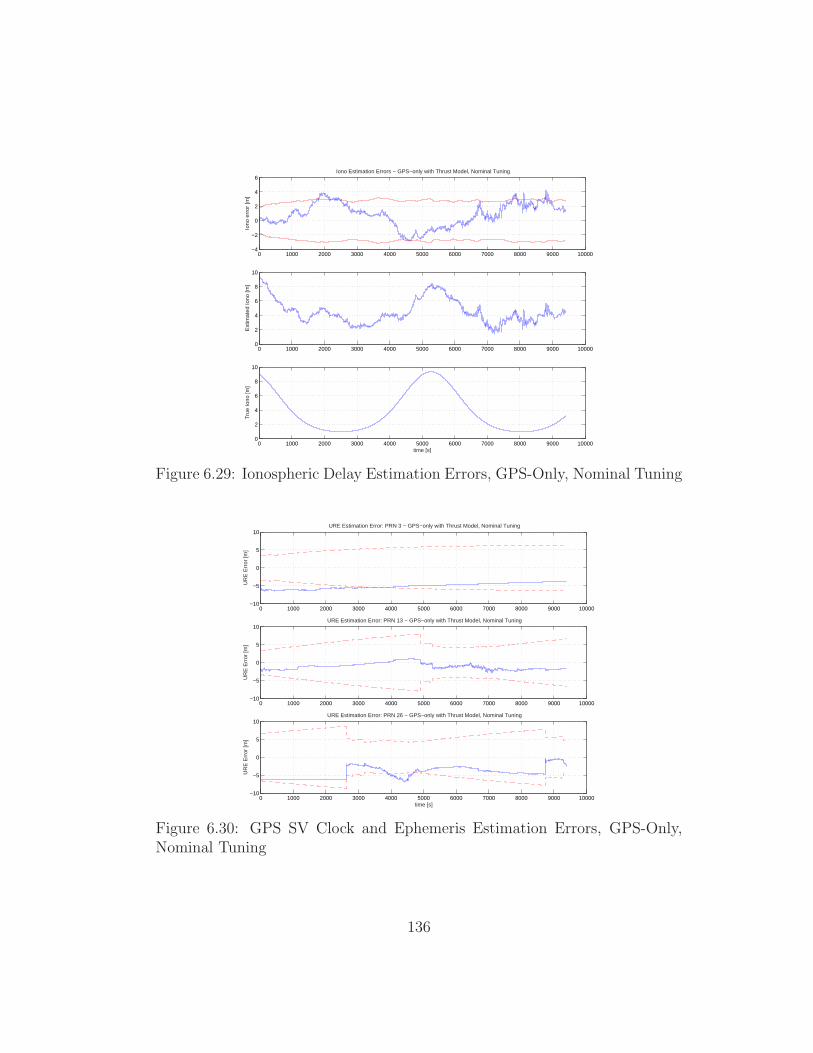
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−4
−2
0
2
4
6
Iono
err
or [m
]
Iono Estimation Errors − GPS−only with Thrust Model, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
Est
imat
ed Io
no [m
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
time [s]
Tru
e Io
no [m
]
Figure 6.29: Ionospheric Delay Estimation Errors, GPS-Only, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
UR
E E
rror
[m]
URE Estimation Error: PRN 3 − GPS−only with Thrust Model, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
UR
E E
rror
[m]
URE Estimation Error: PRN 13 − GPS−only with Thrust Model, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
time [s]
UR
E E
rror
[m]
URE Estimation Error: PRN 26 − GPS−only with Thrust Model, Nominal Tuning
Figure 6.30: GPS SV Clock and Ephemeris Estimation Errors, GPS-Only,Nominal Tuning
136
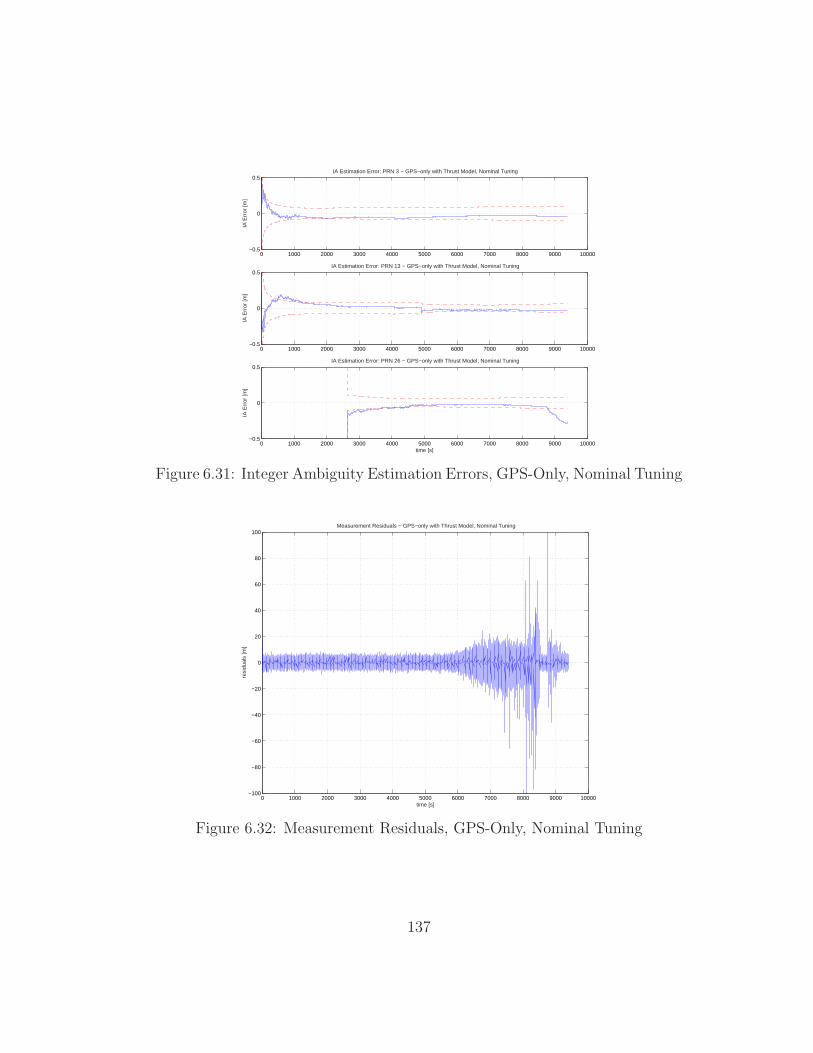
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.5
0
0.5
IA E
rror
[m]
IA Estimation Error: PRN 3 − GPS−only with Thrust Model, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.5
0
0.5
IA E
rror
[m]
IA Estimation Error: PRN 13 − GPS−only with Thrust Model, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.5
0
0.5
time [s]
IA E
rror
[m]
IA Estimation Error: PRN 26 − GPS−only with Thrust Model, Nominal Tuning
Figure 6.31: Integer Ambiguity Estimation Errors, GPS-Only, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−100
−80
−60
−40
−20
0
20
40
60
80
100
time [s]
resi
dual
s [m
]
Measurement Residuals − GPS−only with Thrust Model, Nominal Tuning
Figure 6.32: Measurement Residuals, GPS-Only, Nominal Tuning
137
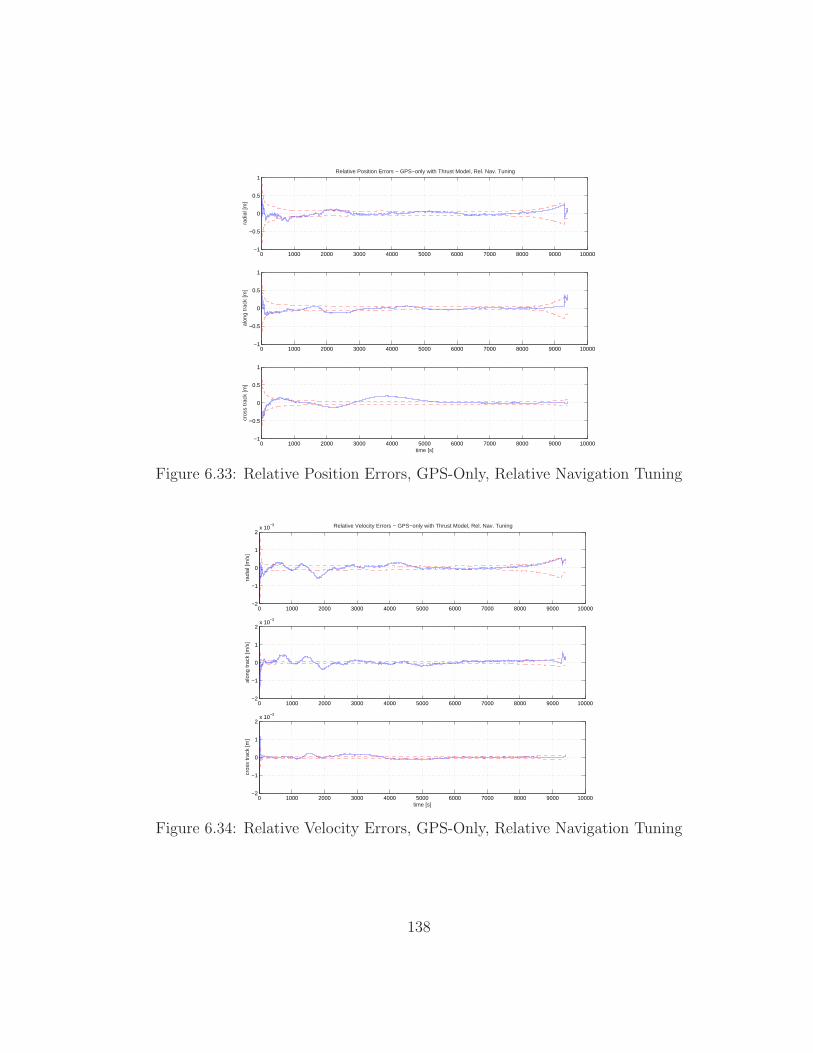
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1
radi
al [m
]
Relative Position Errors − GPS−only with Thrust Model, Rel. Nav. Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1
alon
g tr
ack
[m]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1
time [s]
cros
s tr
ack
[m]
Figure 6.33: Relative Position Errors, GPS-Only, Relative Navigation Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
radi
al [m
/s]
Relative Velocity Errors − GPS−only with Thrust Model, Rel. Nav. Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
alon
g tr
ack
[m/s
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
time [s]
cros
s tr
ack
[m]
Figure 6.34: Relative Velocity Errors, GPS-Only, Relative Navigation Tuning
138
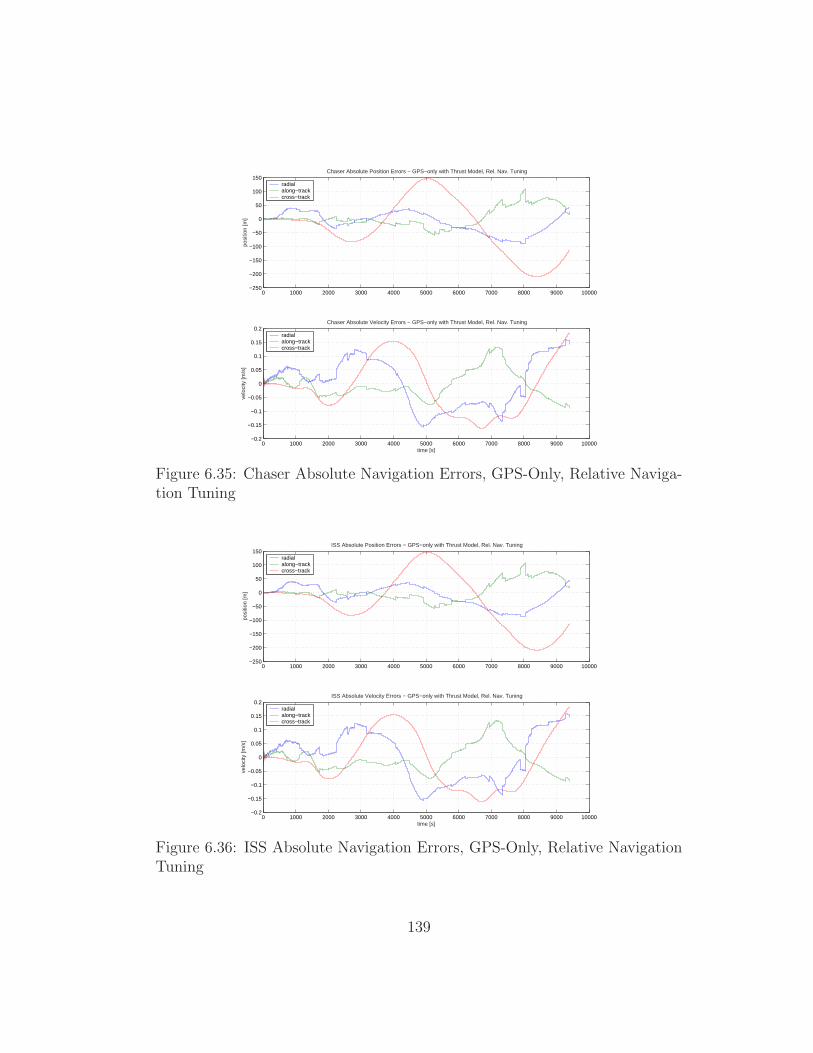
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−250
−200
−150
−100
−50
0
50
100
150
posi
tion
[m]
Chaser Absolute Position Errors − GPS−only with Thrust Model, Rel. Nav. Tuning
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
time [s]
velo
city
[m/s
]
Chaser Absolute Velocity Errors − GPS−only with Thrust Model, Rel. Nav. Tuning
radialalong−trackcross−track
Figure 6.35: Chaser Absolute Navigation Errors, GPS-Only, Relative Naviga-tion Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−250
−200
−150
−100
−50
0
50
100
150
posi
tion
[m]
ISS Absolute Position Errors − GPS−only with Thrust Model, Rel. Nav. Tuning
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
time [s]
velo
city
[m/s
]
ISS Absolute Velocity Errors − GPS−only with Thrust Model, Rel. Nav. Tuning
radialalong−trackcross−track
Figure 6.36: ISS Absolute Navigation Errors, GPS-Only, Relative NavigationTuning
139
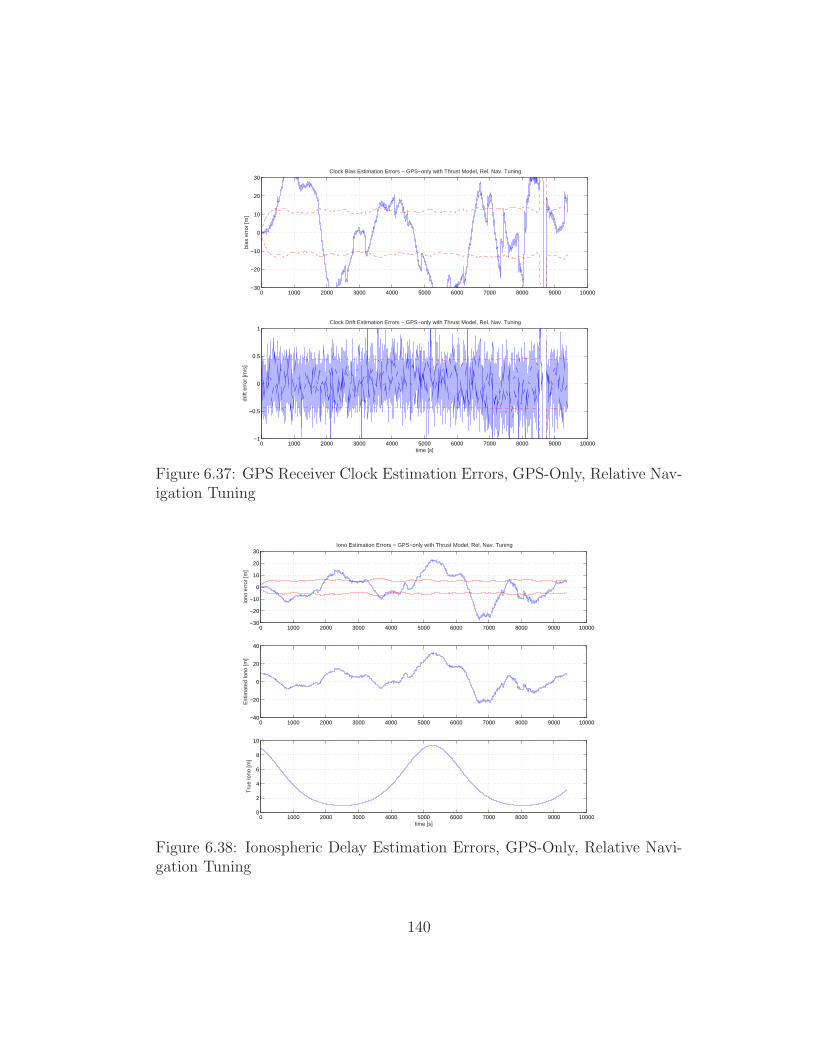
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−30
−20
−10
0
10
20
30
bias
err
or [m
]
Clock Bias Estimation Errors − GPS−only with Thrust Model, Rel. Nav. Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1
time [s]
drift
err
or [m
/s]
Clock Drift Estimation Errors − GPS−only with Thrust Model, Rel. Nav. Tuning
Figure 6.37: GPS Receiver Clock Estimation Errors, GPS-Only, Relative Nav-igation Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−30
−20
−10
0
10
20
30
Iono
err
or [m
]
Iono Estimation Errors − GPS−only with Thrust Model, Rel. Nav. Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−40
−20
0
20
40
Est
imat
ed Io
no [m
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
time [s]
Tru
e Io
no [m
]
Figure 6.38: Ionospheric Delay Estimation Errors, GPS-Only, Relative Navi-gation Tuning
140
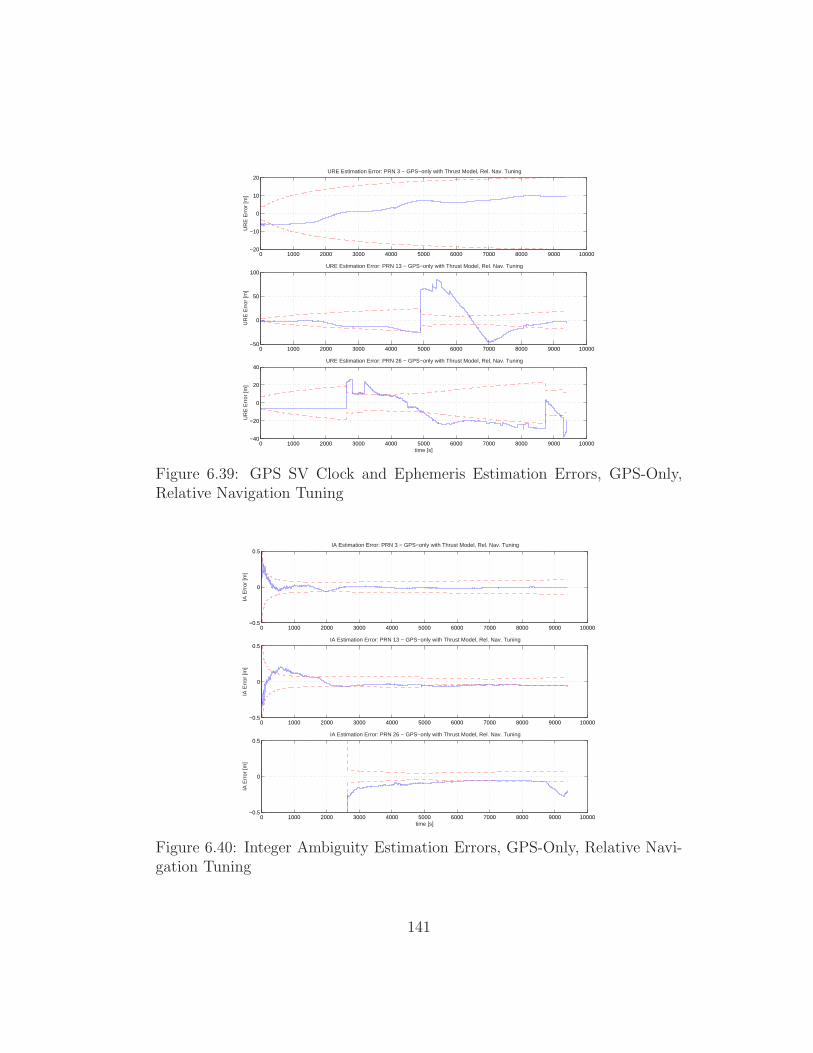
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−20
−10
0
10
20
UR
E E
rror
[m]
URE Estimation Error: PRN 3 − GPS−only with Thrust Model, Rel. Nav. Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−50
0
50
100
UR
E E
rror
[m]
URE Estimation Error: PRN 13 − GPS−only with Thrust Model, Rel. Nav. Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−40
−20
0
20
40
time [s]
UR
E E
rror
[m]
URE Estimation Error: PRN 26 − GPS−only with Thrust Model, Rel. Nav. Tuning
Figure 6.39: GPS SV Clock and Ephemeris Estimation Errors, GPS-Only,Relative Navigation Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.5
0
0.5
IA E
rror
[m]
IA Estimation Error: PRN 3 − GPS−only with Thrust Model, Rel. Nav. Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.5
0
0.5
IA E
rror
[m]
IA Estimation Error: PRN 13 − GPS−only with Thrust Model, Rel. Nav. Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.5
0
0.5
time [s]
IA E
rror
[m]
IA Estimation Error: PRN 26 − GPS−only with Thrust Model, Rel. Nav. Tuning
Figure 6.40: Integer Ambiguity Estimation Errors, GPS-Only, Relative Navi-gation Tuning
141
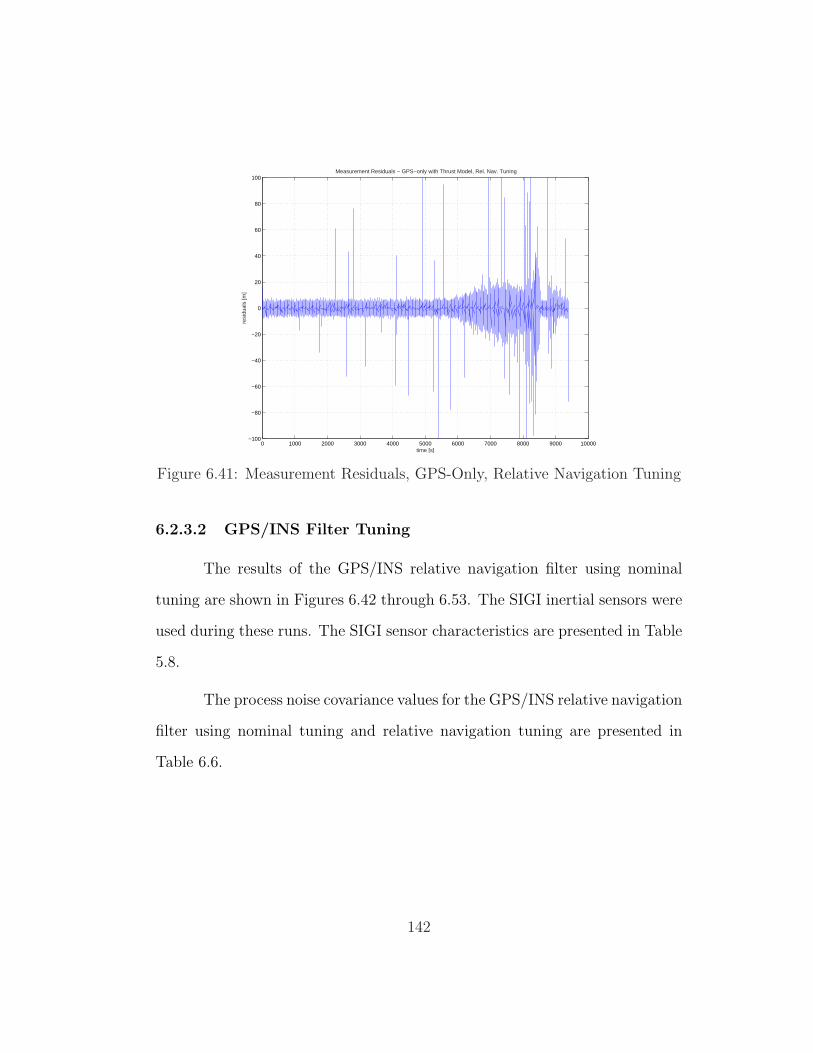
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−100
−80
−60
−40
−20
0
20
40
60
80
100
time [s]
resi
dual
s [m
]
Measurement Residuals − GPS−only with Thrust Model, Rel. Nav. Tuning
Figure 6.41: Measurement Residuals, GPS-Only, Relative Navigation Tuning
6.2.3.2 GPS/INS Filter Tuning
The results of the GPS/INS relative navigation filter using nominal
tuning are shown in Figures 6.42 through 6.53. The SIGI inertial sensors were
used during these runs. The SIGI sensor characteristics are presented in Table
5.8.
The process noise covariance values for the GPS/INS relative navigation
filter using nominal tuning and relative navigation tuning are presented in
Table 6.6.
142
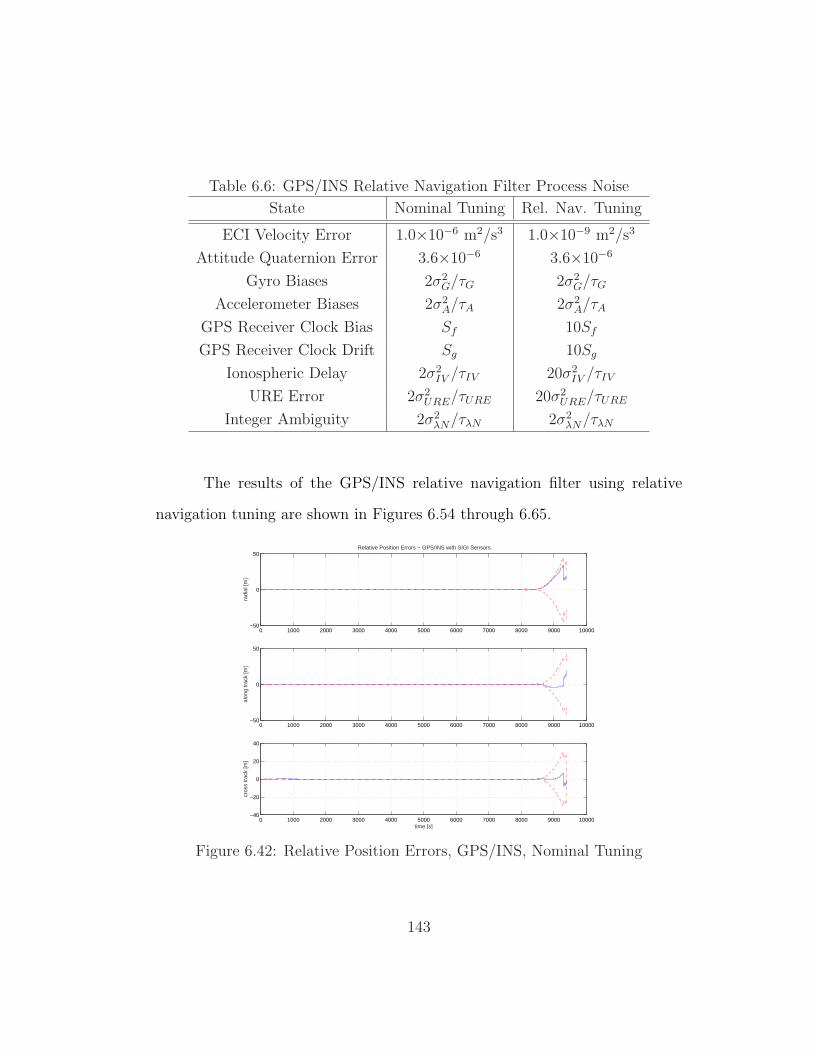
Table 6.6: GPS/INS Relative Navigation Filter Process Noise
State Nominal Tuning Rel. Nav. Tuning
ECI Velocity Error 1.0×10−6 m2/s3 1.0×10−9 m2/s3
Attitude Quaternion Error 3.6×10−6 3.6×10−6
Gyro Biases 2σ2G/τG 2σ2
G/τG
Accelerometer Biases 2σ2A/τA 2σ2
A/τA
GPS Receiver Clock Bias Sf 10Sf
GPS Receiver Clock Drift Sg 10Sg
Ionospheric Delay 2σ2IV /τIV 20σ2
IV /τIV
URE Error 2σ2URE/τURE 20σ2
URE/τURE
Integer Ambiguity 2σ2λN/τλN 2σ2
λN/τλN
The results of the GPS/INS relative navigation filter using relative
navigation tuning are shown in Figures 6.54 through 6.65.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−50
0
50
radi
al [m
]
Relative Position Errors − GPS/INS with SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−50
0
50
alon
g tr
ack
[m]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−40
−20
0
20
40
time [s]
cros
s tr
ack
[m]
Figure 6.42: Relative Position Errors, GPS/INS, Nominal Tuning
143
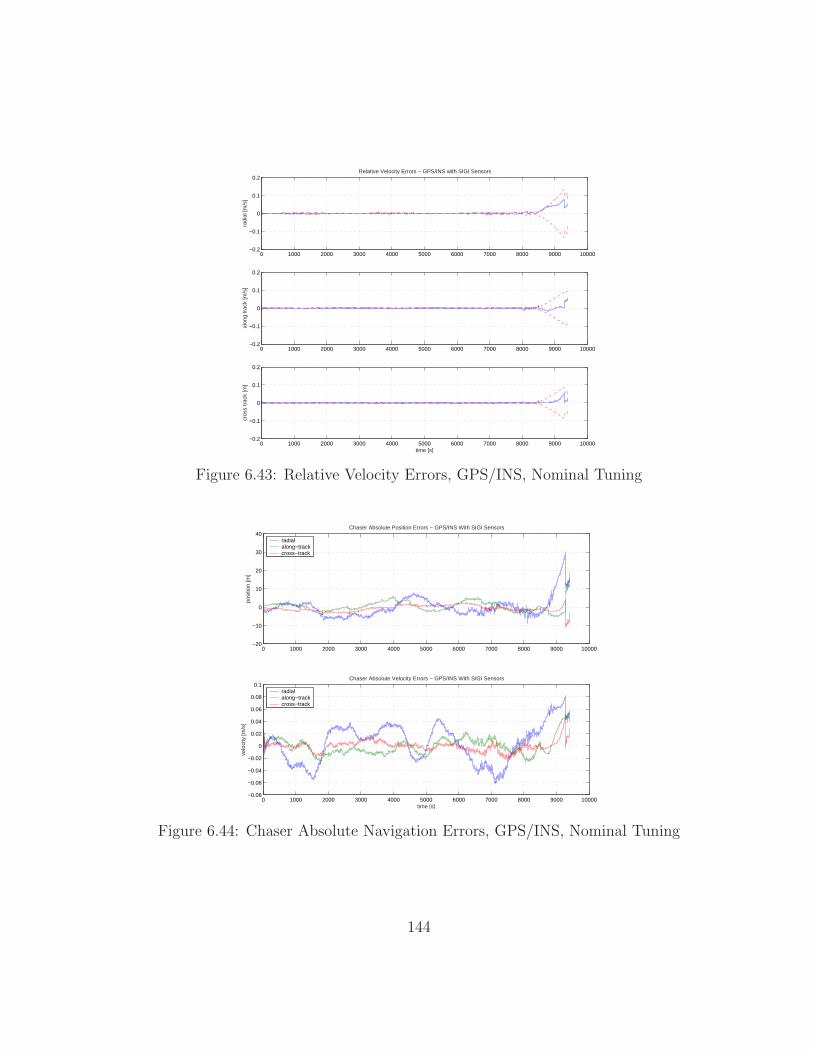
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
radi
al [m
/s]
Relative Velocity Errors − GPS/INS with SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
alon
g tr
ack
[m/s
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
time [s]
cros
s tr
ack
[m]
Figure 6.43: Relative Velocity Errors, GPS/INS, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−20
−10
0
10
20
30
40
posi
tion
[m]
Chaser Absolute Position Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
time [s]
velo
city
[m/s
]
Chaser Absolute Velocity Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
Figure 6.44: Chaser Absolute Navigation Errors, GPS/INS, Nominal Tuning
144
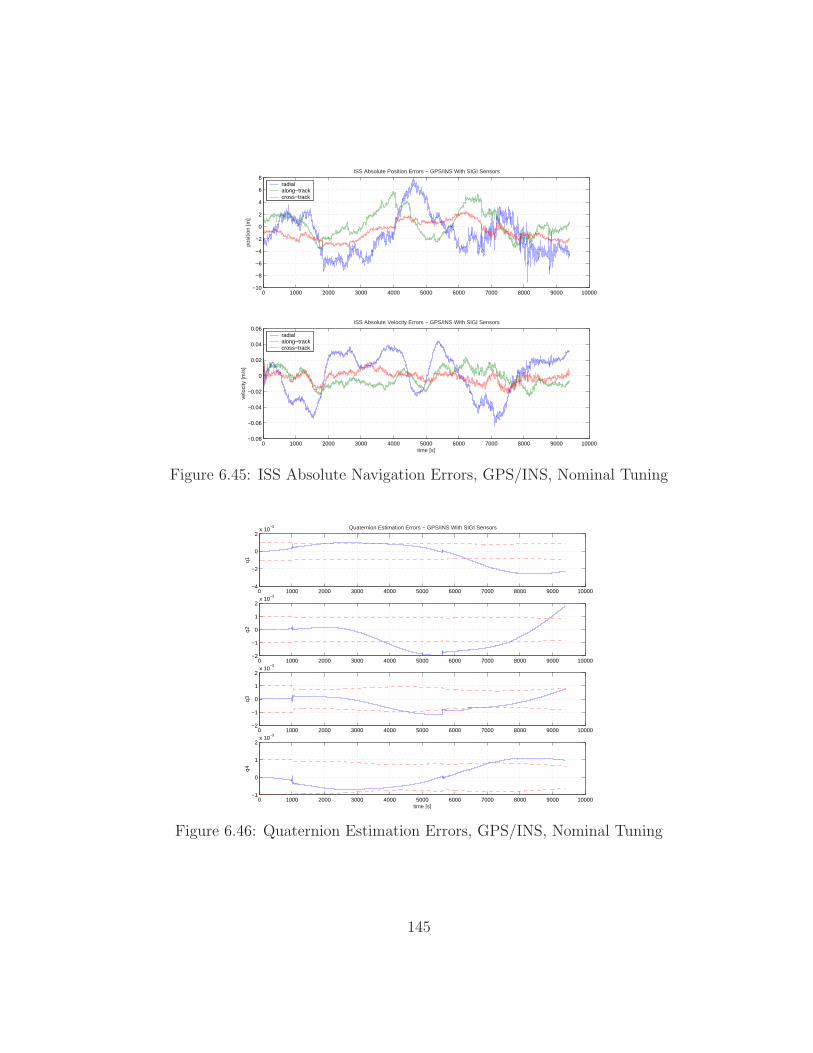
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−8
−6
−4
−2
0
2
4
6
8
posi
tion
[m]
ISS Absolute Position Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
time [s]
velo
city
[m/s
]
ISS Absolute Velocity Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
Figure 6.45: ISS Absolute Navigation Errors, GPS/INS, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−4
−2
0
2x 10
−3
q1
Quaternion Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
q2
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
q3
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
0
1
2x 10
−3
time [s]
q4
Figure 6.46: Quaternion Estimation Errors, GPS/INS, Nominal Tuning
145
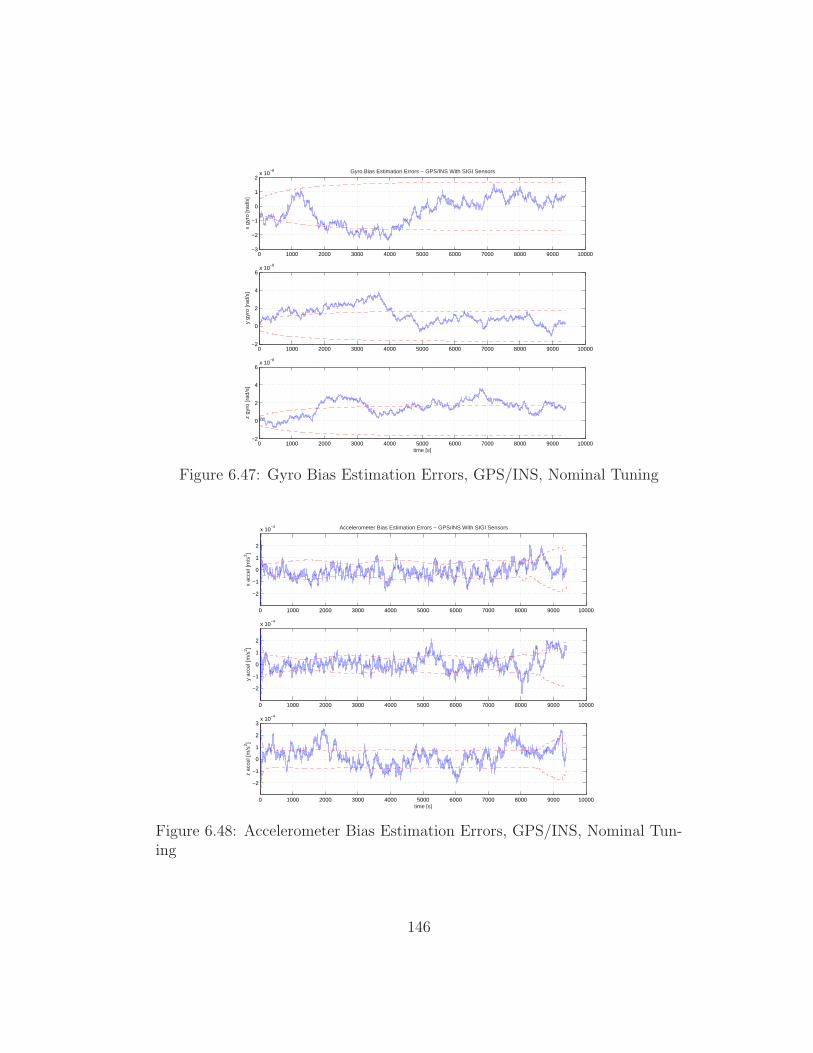
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−3
−2
−1
0
1
2x 10
−8
x gy
ro [r
ad/s
]
Gyro Bias Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
0
2
4
6x 10
−8
y gy
ro [r
ad/s
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
0
2
4
6x 10
−8
time [s]
z gy
ro [r
ad/s
]
Figure 6.47: Gyro Bias Estimation Errors, GPS/INS, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
−2
−1
0
1
2
x 10−4
x ac
cel [
m/s
2 ]
Accelerometer Bias Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
−2
−1
0
1
2
x 10−4
y ac
cel [
m/s
2 ]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
−2
−1
0
1
2
3x 10
−4
time [s]
z ac
cel [
m/s
2 ]
Figure 6.48: Accelerometer Bias Estimation Errors, GPS/INS, Nominal Tun-ing
146
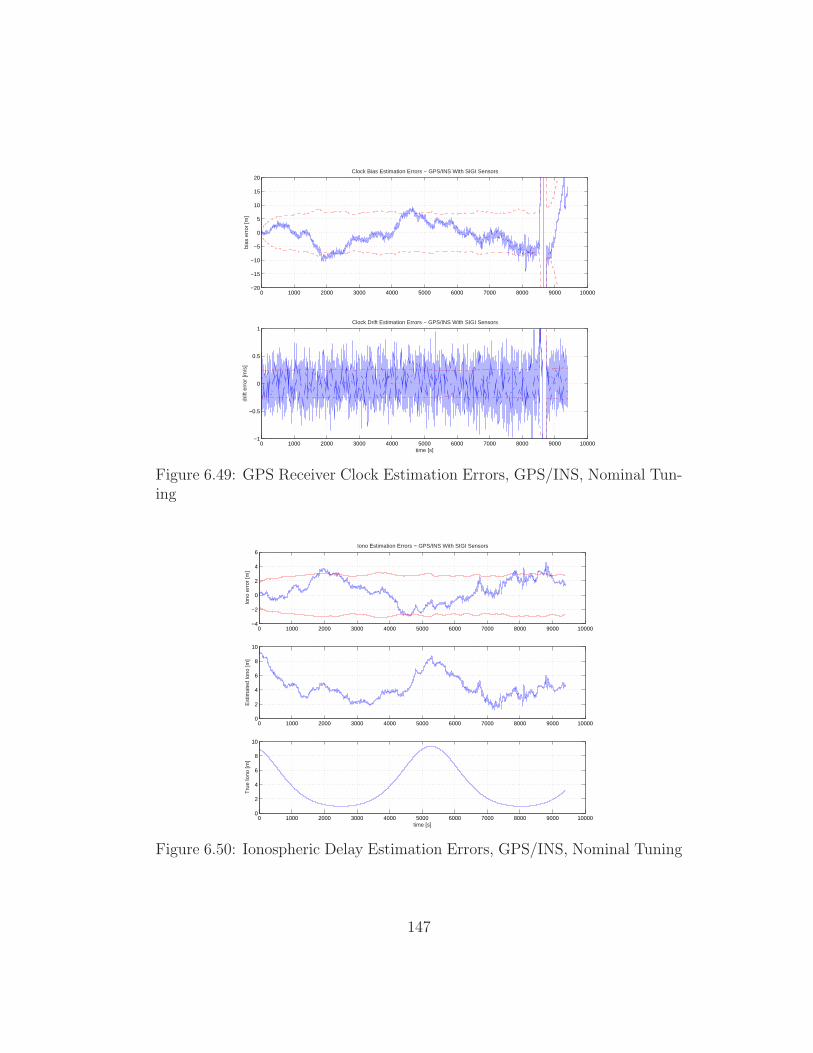
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−20
−15
−10
−5
0
5
10
15
20
bias
err
or [m
]
Clock Bias Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1
time [s]
drift
err
or [m
/s]
Clock Drift Estimation Errors − GPS/INS With SIGI Sensors
Figure 6.49: GPS Receiver Clock Estimation Errors, GPS/INS, Nominal Tun-ing
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−4
−2
0
2
4
6
Iono
err
or [m
]
Iono Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
Est
imat
ed Io
no [m
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
time [s]
Tru
e Io
no [m
]
Figure 6.50: Ionospheric Delay Estimation Errors, GPS/INS, Nominal Tuning
147
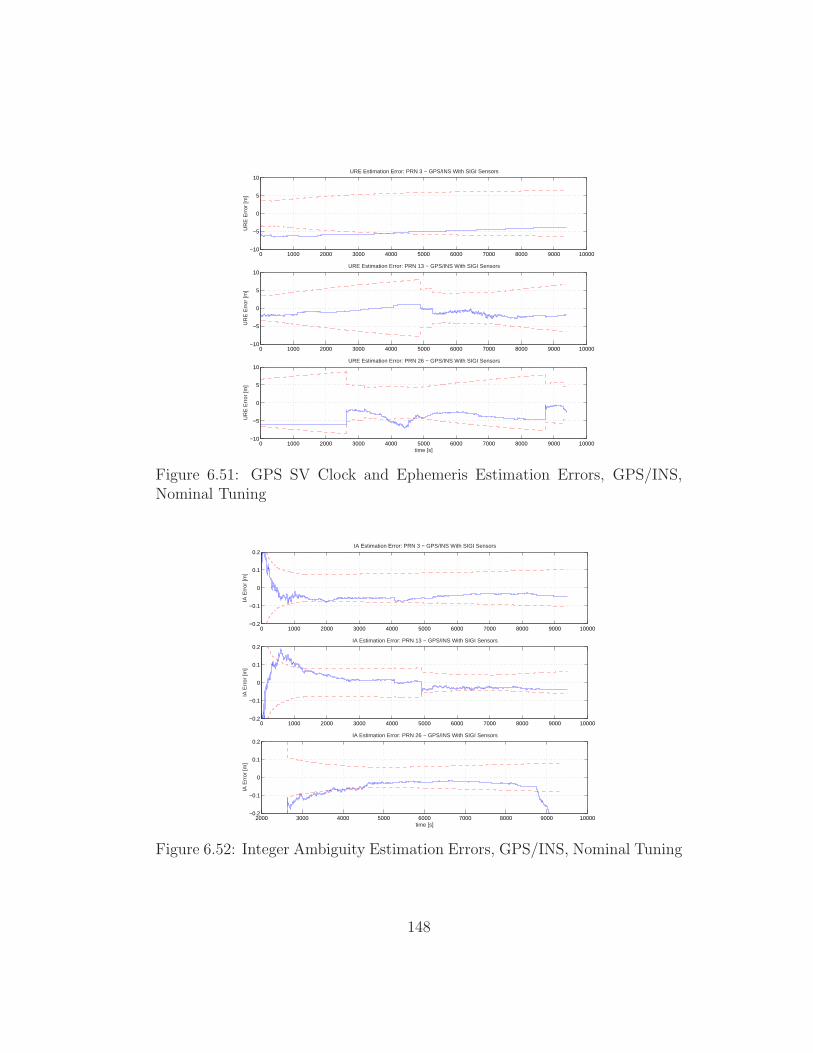
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
UR
E E
rror
[m]
URE Estimation Error: PRN 3 − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
UR
E E
rror
[m]
URE Estimation Error: PRN 13 − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−5
0
5
10
time [s]
UR
E E
rror
[m]
URE Estimation Error: PRN 26 − GPS/INS With SIGI Sensors
Figure 6.51: GPS SV Clock and Ephemeris Estimation Errors, GPS/INS,Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
IA E
rror
[m]
IA Estimation Error: PRN 3 − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
IA E
rror
[m]
IA Estimation Error: PRN 13 − GPS/INS With SIGI Sensors
2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
time [s]
IA E
rror
[m]
IA Estimation Error: PRN 26 − GPS/INS With SIGI Sensors
Figure 6.52: Integer Ambiguity Estimation Errors, GPS/INS, Nominal Tuning
148
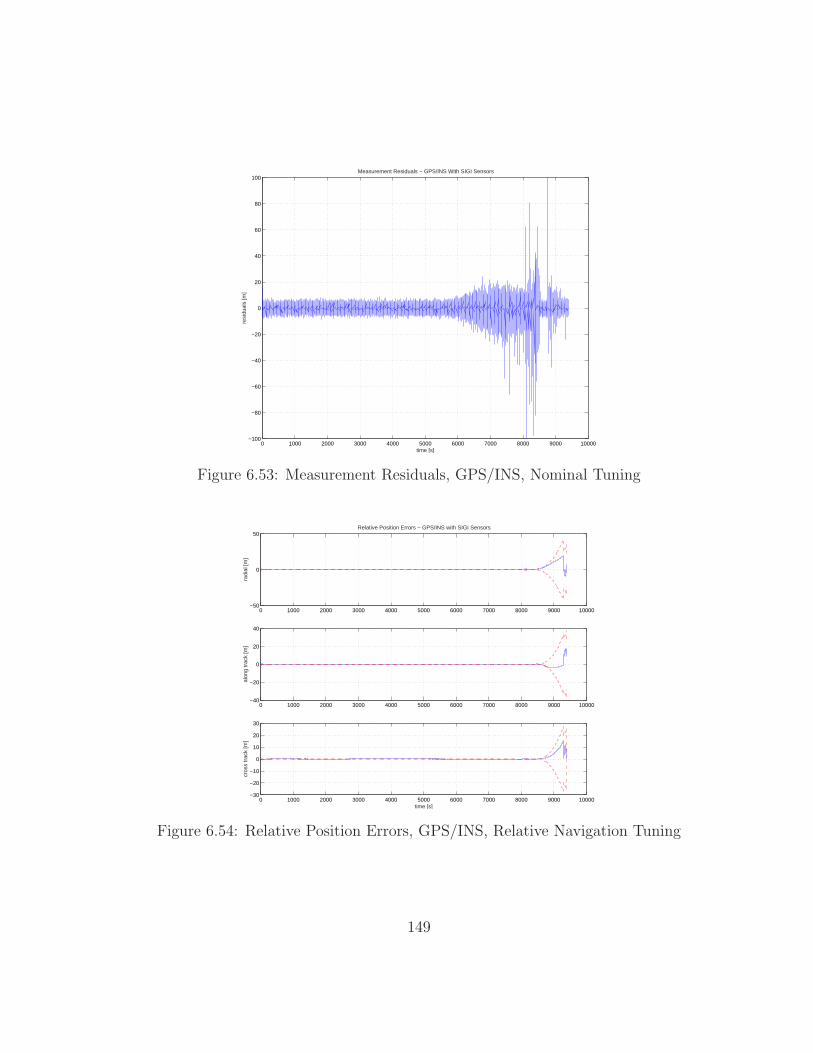
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−100
−80
−60
−40
−20
0
20
40
60
80
100
time [s]
resi
dual
s [m
]
Measurement Residuals − GPS/INS With SIGI Sensors
Figure 6.53: Measurement Residuals, GPS/INS, Nominal Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−50
0
50
radi
al [m
]
Relative Position Errors − GPS/INS with SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−40
−20
0
20
40
alon
g tr
ack
[m]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−30
−20
−10
0
10
20
30
time [s]
cros
s tr
ack
[m]
Figure 6.54: Relative Position Errors, GPS/INS, Relative Navigation Tuning
149
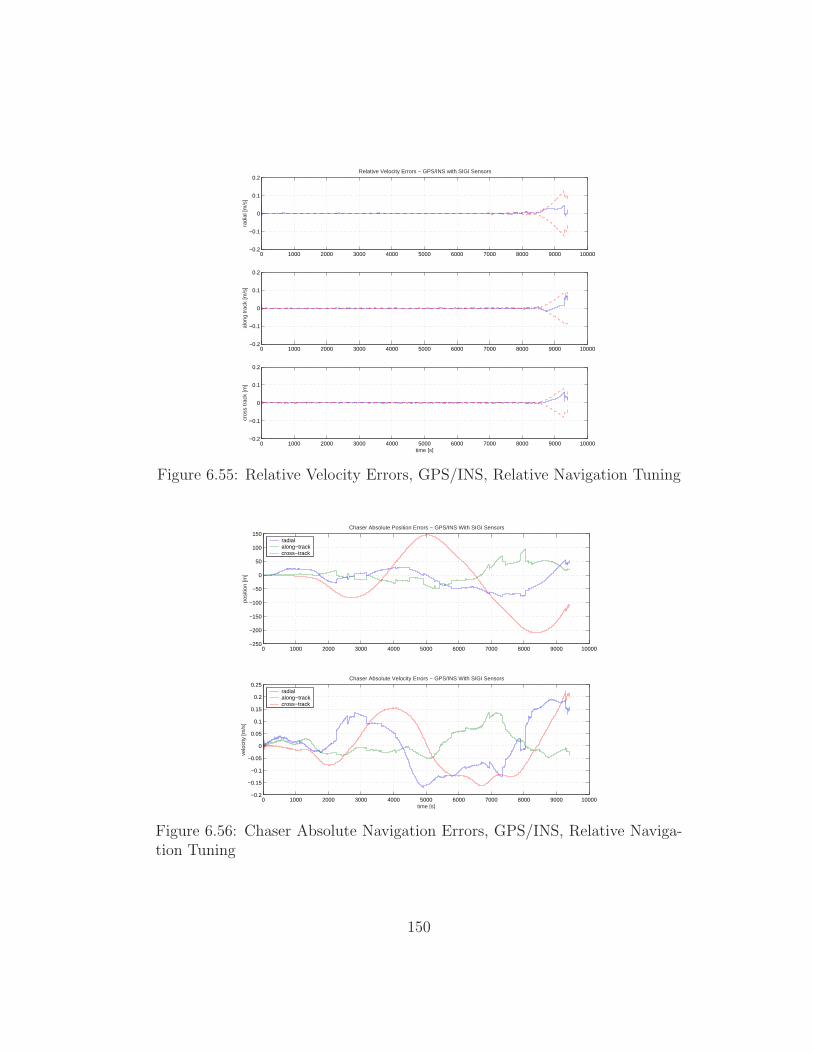
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
radi
al [m
/s]
Relative Velocity Errors − GPS/INS with SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
alon
g tr
ack
[m/s
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
time [s]
cros
s tr
ack
[m]
Figure 6.55: Relative Velocity Errors, GPS/INS, Relative Navigation Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−250
−200
−150
−100
−50
0
50
100
150
posi
tion
[m]
Chaser Absolute Position Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
time [s]
velo
city
[m/s
]
Chaser Absolute Velocity Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
Figure 6.56: Chaser Absolute Navigation Errors, GPS/INS, Relative Naviga-tion Tuning
150
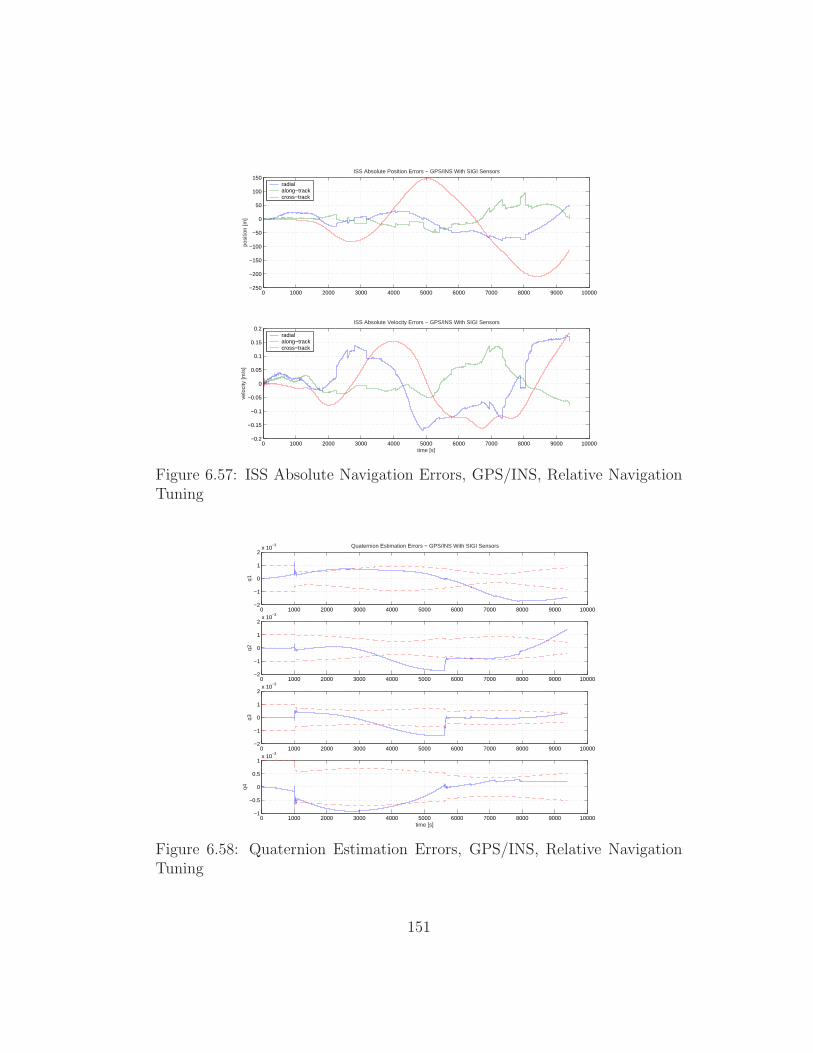
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−250
−200
−150
−100
−50
0
50
100
150
posi
tion
[m]
ISS Absolute Position Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
time [s]
velo
city
[m/s
]
ISS Absolute Velocity Errors − GPS/INS With SIGI Sensors
radialalong−trackcross−track
Figure 6.57: ISS Absolute Navigation Errors, GPS/INS, Relative NavigationTuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
q1
Quaternion Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
q2
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
−1
0
1
2x 10
−3
q3
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1x 10
−3
time [s]
q4
Figure 6.58: Quaternion Estimation Errors, GPS/INS, Relative NavigationTuning
151
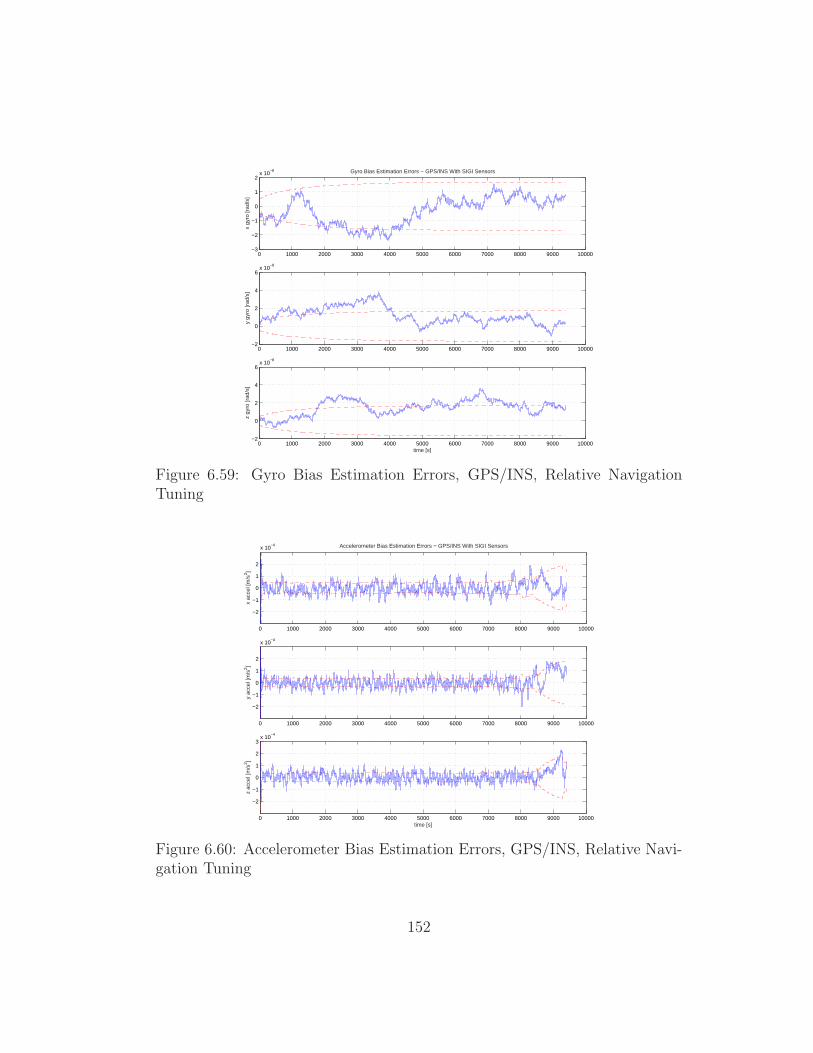
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−3
−2
−1
0
1
2x 10
−8
x gy
ro [r
ad/s
]
Gyro Bias Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
0
2
4
6x 10
−8
y gy
ro [r
ad/s
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
0
2
4
6x 10
−8
time [s]
z gy
ro [r
ad/s
]
Figure 6.59: Gyro Bias Estimation Errors, GPS/INS, Relative NavigationTuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
−2
−1
0
1
2
x 10−4
x ac
cel [
m/s
2 ]
Accelerometer Bias Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
−2
−1
0
1
2
x 10−4
y ac
cel [
m/s
2 ]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
−2
−1
0
1
2
3x 10
−4
time [s]
z ac
cel [
m/s
2 ]
Figure 6.60: Accelerometer Bias Estimation Errors, GPS/INS, Relative Navi-gation Tuning
152
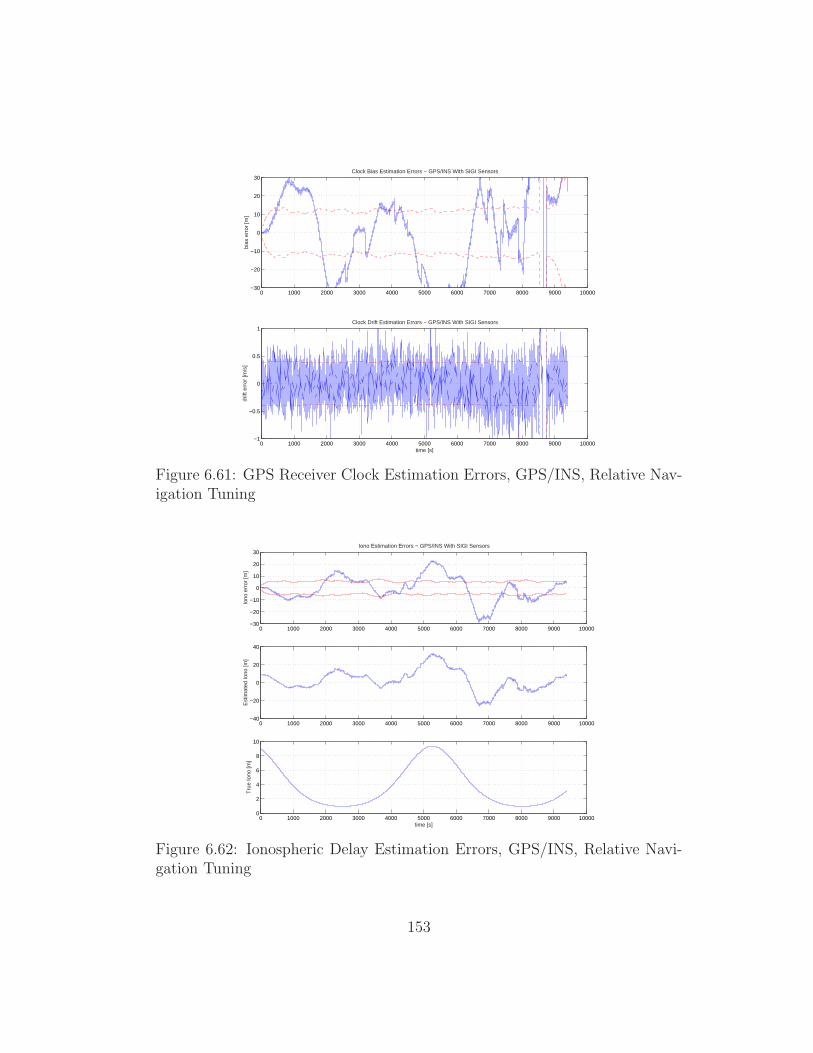
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−30
−20
−10
0
10
20
30
bias
err
or [m
]
Clock Bias Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
−0.5
0
0.5
1
time [s]
drift
err
or [m
/s]
Clock Drift Estimation Errors − GPS/INS With SIGI Sensors
Figure 6.61: GPS Receiver Clock Estimation Errors, GPS/INS, Relative Nav-igation Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−30
−20
−10
0
10
20
30
Iono
err
or [m
]
Iono Estimation Errors − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−40
−20
0
20
40
Est
imat
ed Io
no [m
]
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
time [s]
Tru
e Io
no [m
]
Figure 6.62: Ionospheric Delay Estimation Errors, GPS/INS, Relative Navi-gation Tuning
153
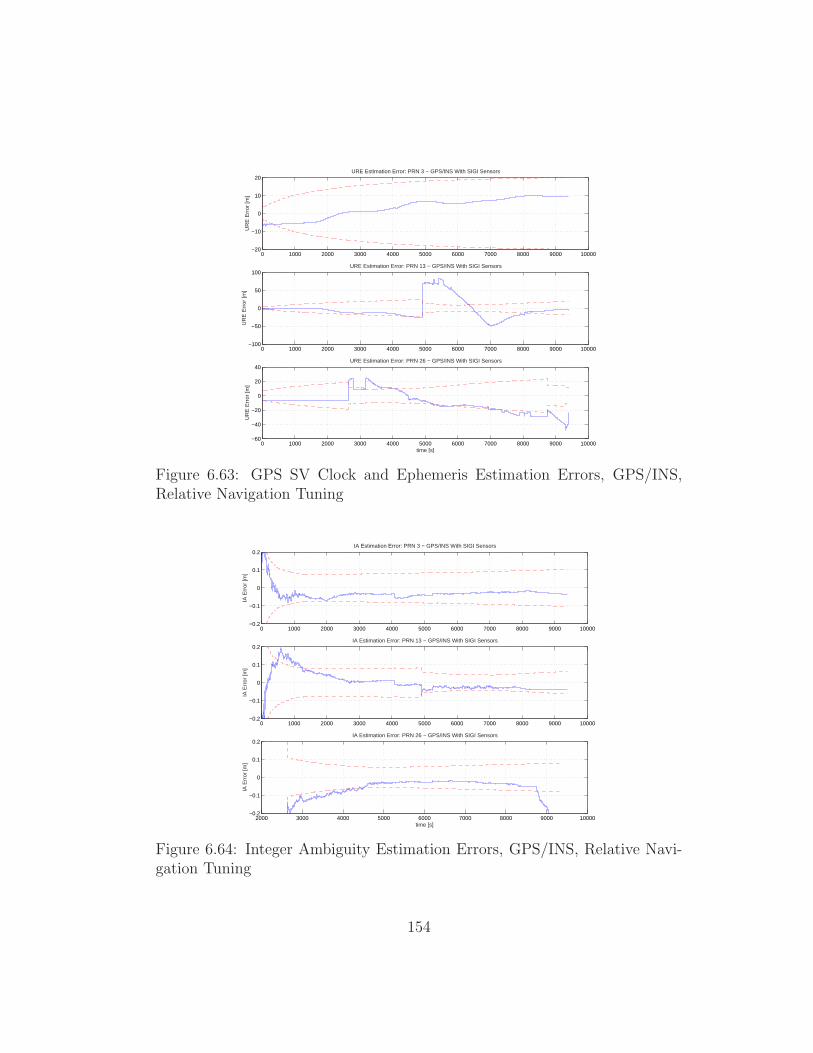
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−20
−10
0
10
20
UR
E E
rror
[m]
URE Estimation Error: PRN 3 − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−100
−50
0
50
100
UR
E E
rror
[m]
URE Estimation Error: PRN 13 − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−60
−40
−20
0
20
40
time [s]
UR
E E
rror
[m]
URE Estimation Error: PRN 26 − GPS/INS With SIGI Sensors
Figure 6.63: GPS SV Clock and Ephemeris Estimation Errors, GPS/INS,Relative Navigation Tuning
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
IA E
rror
[m]
IA Estimation Error: PRN 3 − GPS/INS With SIGI Sensors
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
IA E
rror
[m]
IA Estimation Error: PRN 13 − GPS/INS With SIGI Sensors
2000 3000 4000 5000 6000 7000 8000 9000 10000−0.2
−0.1
0
0.1
0.2
time [s]
IA E
rror
[m]
IA Estimation Error: PRN 26 − GPS/INS With SIGI Sensors
Figure 6.64: Integer Ambiguity Estimation Errors, GPS/INS, Relative Navi-gation Tuning
154

0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−100
−80
−60
−40
−20
0
20
40
60
80
100
time [s]
resi
dual
s [m
]
Measurement Residuals − GPS/INS With SIGI Sensors
Figure 6.65: Measurement Residuals, GPS/INS, Relative Navigation Tuning
6.2.3.3 Tuning Comparison
The effects of all GPS error sources including blockage and multipath
using the multipath model parameters given in Table 6.1 were included in
all four runs. A comparison of the relative navigation performance obtained
from nominal and relative navigation tuning for the GPS-only filter and the
GPS/INS filter is shown in Table 6.7.
155
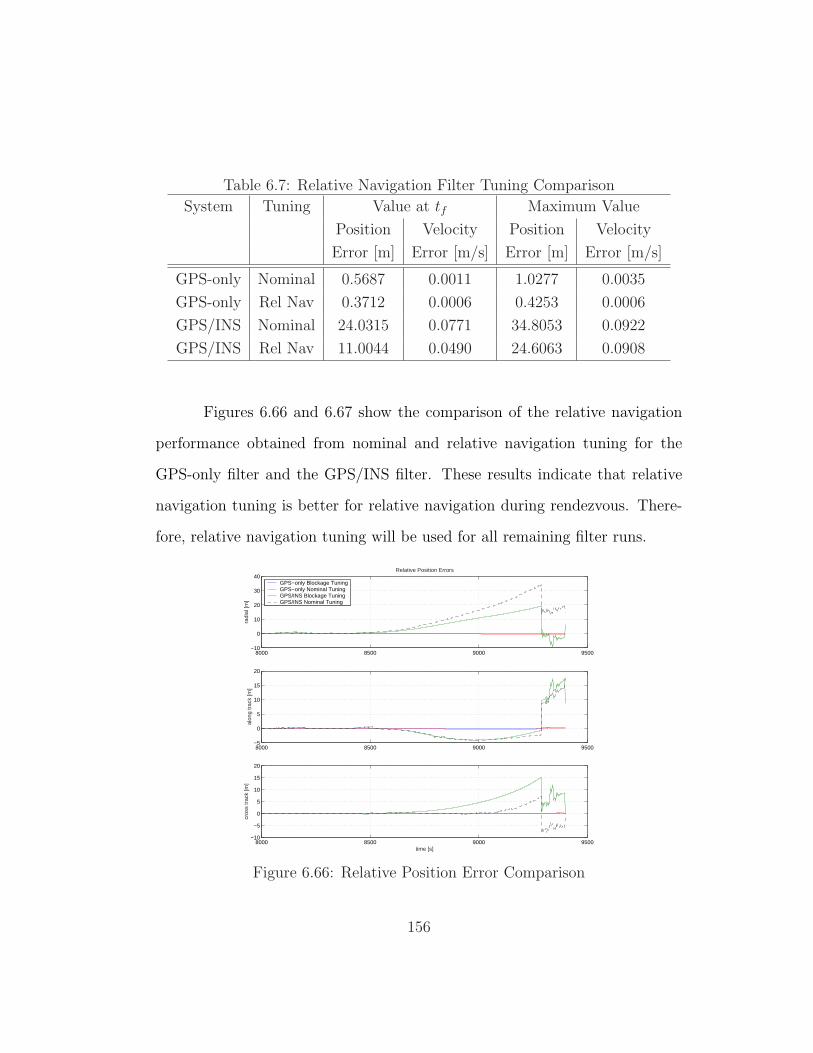
Table 6.7: Relative Navigation Filter Tuning Comparison
System Tuning Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
GPS-only Nominal 0.5687 0.0011 1.0277 0.0035
GPS-only Rel Nav 0.3712 0.0006 0.4253 0.0006
GPS/INS Nominal 24.0315 0.0771 34.8053 0.0922
GPS/INS Rel Nav 11.0044 0.0490 24.6063 0.0908
Figures 6.66 and 6.67 show the comparison of the relative navigation
performance obtained from nominal and relative navigation tuning for the
GPS-only filter and the GPS/INS filter. These results indicate that relative
navigation tuning is better for relative navigation during rendezvous. There-
fore, relative navigation tuning will be used for all remaining filter runs.
8000 8500 9000 9500−10
0
10
20
30
40
radi
al [m
]
Relative Position Errors
GPS−only Blockage TuningGPS−only Nominal TuningGPS/INS Blockage TuningGPS/INS Nominal Tuning
8000 8500 9000 9500−5
0
5
10
15
20
alon
g tr
ack
[m]
8000 8500 9000 9500−10
−5
0
5
10
15
20
time [s]
cros
s tr
ack
[m]
Figure 6.66: Relative Position Error Comparison
156
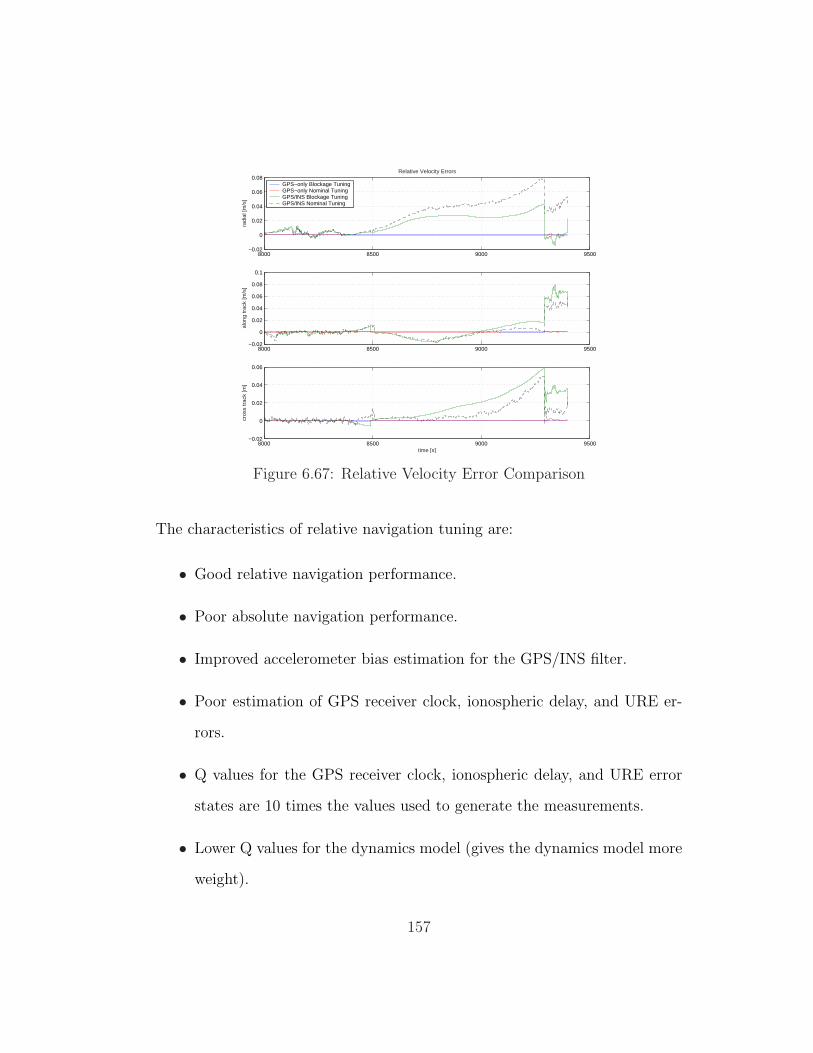
8000 8500 9000 9500−0.02
0
0.02
0.04
0.06
0.08
radi
al [m
/s]
Relative Velocity Errors
GPS−only Blockage TuningGPS−only Nominal TuningGPS/INS Blockage TuningGPS/INS Nominal Tuning
8000 8500 9000 9500−0.02
0
0.02
0.04
0.06
0.08
0.1
alon
g tr
ack
[m/s
]
8000 8500 9000 9500−0.02
0
0.02
0.04
0.06
time [s]
cros
s tr
ack
[m]
Figure 6.67: Relative Velocity Error Comparison
The characteristics of relative navigation tuning are:
• Good relative navigation performance.
• Poor absolute navigation performance.
• Improved accelerometer bias estimation for the GPS/INS filter.
• Poor estimation of GPS receiver clock, ionospheric delay, and URE er-
rors.
• Q values for the GPS receiver clock, ionospheric delay, and URE error
states are 10 times the values used to generate the measurements.
• Lower Q values for the dynamics model (gives the dynamics model more
weight).
157
The characteristics of nominal tuning are:
• Poor relative navigation performance.
• Good absolute navigation performance.
• Good estimation of GPS receiver clock, ionospheric delay, and URE er-
rors.
• Q values are set to the values used to generate the GPS measurements.
• Higher Q values for the dynamics model (gives the GPS measurements
more weight).
The navigation performance of the GPS/INS can be at least partially
explained by the filter’s ability to estimate the accelerometer biases to only
within about 1× 10−4 m/s2. If there is a constant 1× 10−4 m/s2 error in the
estimate in the accelerometer bias, it will integrate into a 50-meter position
error during a 1000-second GPS blockage. Given this analysis, the accelerom-
eter bias needs to be estimated within 2× 10−6 m/s2 per axis in order to limit
the position error to 1 meter per axis during a 1000-second GPS blockage.
Another contributing factor is the measurement of atmospheric drag
by the SIGI accelerometers. The magnitude of the specific force due to at-
mospheric drag on the chaser vehicle is approximately 1 µg. The white noise
specification of accelerometer is an indication of its sensitivity. Based on this
158
value for the SIGI accelerometer, it can be concluded that the SIGI accelerom-
eter is unable to adequately measure the effect of atmospheric drag because it
is below the SIGI accelerometer noise threshold.
The measurement of thrust by the SIGI accelerometers is also imper-
fect, even though the accelerations due to thrust are above the noise threshold.
Since the GPS-only filter was given a perfect thruster model, the GPS-only
filter is being provided better thrust information than any accelerometer could
provide. This is another contributing factor explaining the better navigation
performance of the GPS-only filter
6.2.4 Constellation Geometry and Approach Directions
The effects of GPS constellation geometry and the rendezvous approach
direction were studied. The GPS constellation was moved forward in time
to obtain four different geometrical configurations. The R-bar and V-bar
approaches were simulated with each GPS constellation configuration. The
number of visible GPS satellites at both the chaser and ISS for the eight com-
binations of constellation geometry and approach direction is shown in Figure
6.68.
159
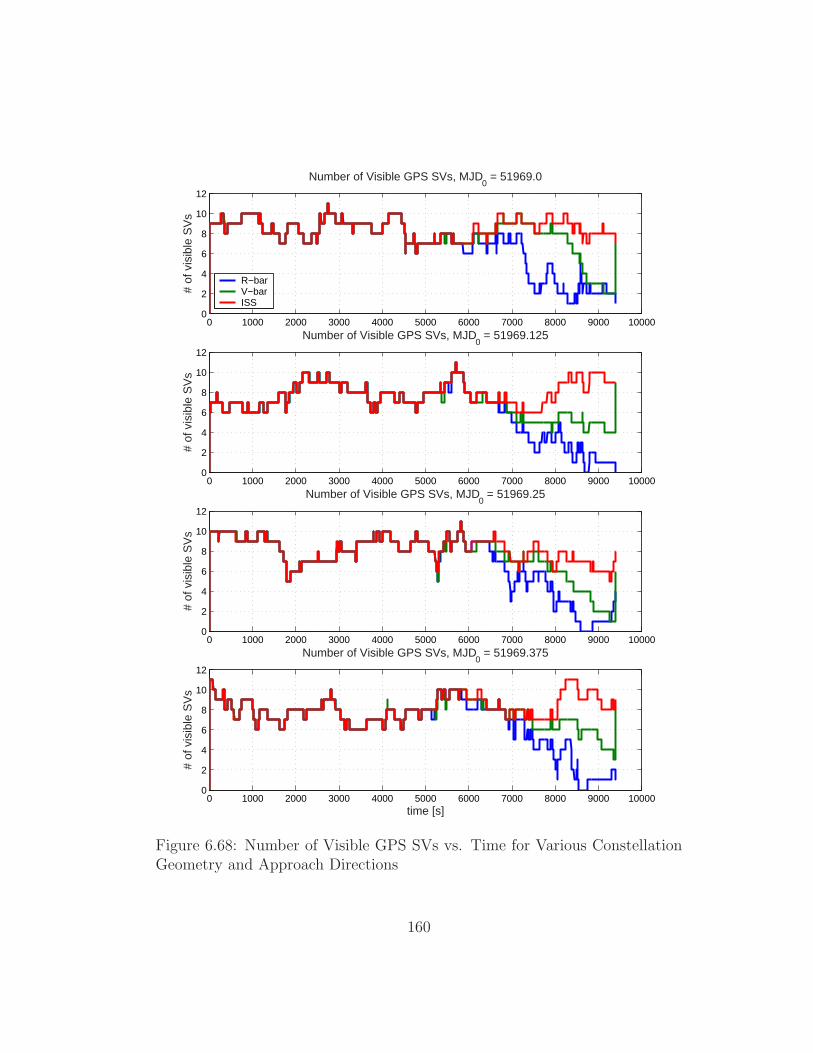
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
12#
of v
isib
le S
Vs
Number of Visible GPS SVs, MJD0 = 51969.0
R−barV−barISS
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
12
# of
vis
ible
SV
s
Number of Visible GPS SVs, MJD0 = 51969.125
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
12
# of
vis
ible
SV
s
Number of Visible GPS SVs, MJD0 = 51969.25
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6
8
10
12
time [s]
# of
vis
ible
SV
s
Number of Visible GPS SVs, MJD0 = 51969.375
Figure 6.68: Number of Visible GPS SVs vs. Time for Various ConstellationGeometry and Approach Directions
160
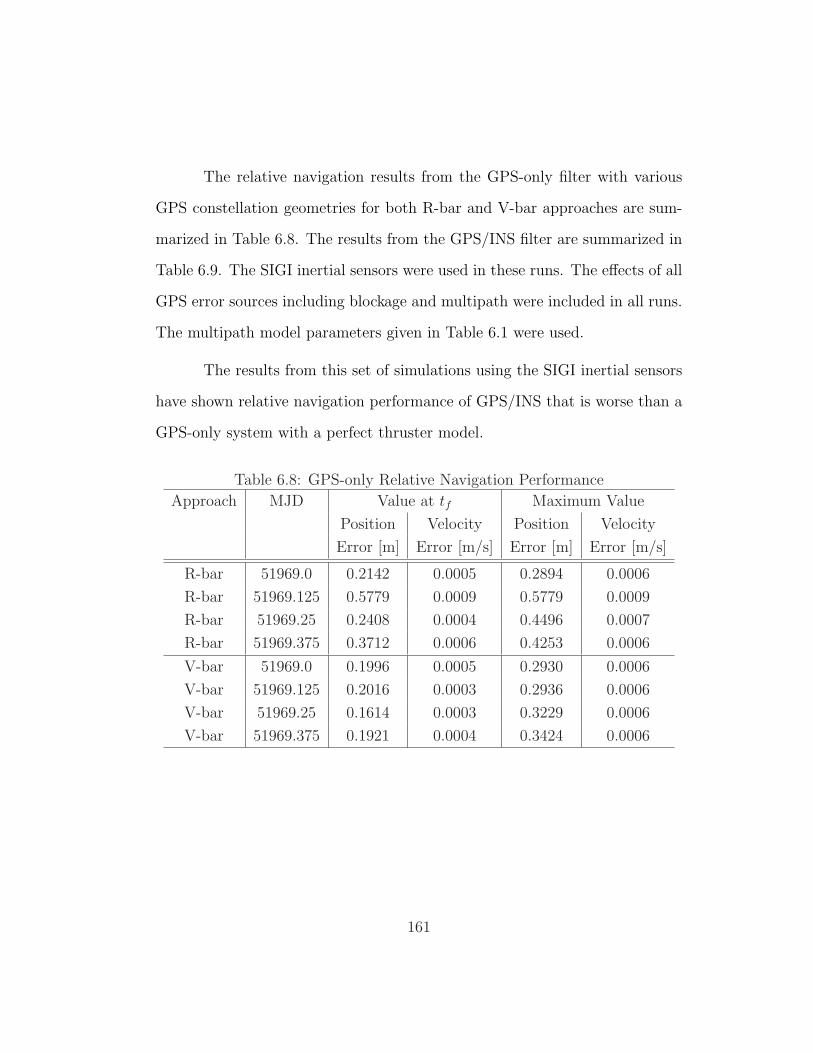
The relative navigation results from the GPS-only filter with various
GPS constellation geometries for both R-bar and V-bar approaches are sum-
marized in Table 6.8. The results from the GPS/INS filter are summarized in
Table 6.9. The SIGI inertial sensors were used in these runs. The effects of all
GPS error sources including blockage and multipath were included in all runs.
The multipath model parameters given in Table 6.1 were used.
The results from this set of simulations using the SIGI inertial sensors
have shown relative navigation performance of GPS/INS that is worse than a
GPS-only system with a perfect thruster model.
Table 6.8: GPS-only Relative Navigation Performance
Approach MJD Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
R-bar 51969.0 0.2142 0.0005 0.2894 0.0006
R-bar 51969.125 0.5779 0.0009 0.5779 0.0009
R-bar 51969.25 0.2408 0.0004 0.4496 0.0007
R-bar 51969.375 0.3712 0.0006 0.4253 0.0006
V-bar 51969.0 0.1996 0.0005 0.2930 0.0006
V-bar 51969.125 0.2016 0.0003 0.2936 0.0006
V-bar 51969.25 0.1614 0.0003 0.3229 0.0006
V-bar 51969.375 0.1921 0.0004 0.3424 0.0006
161
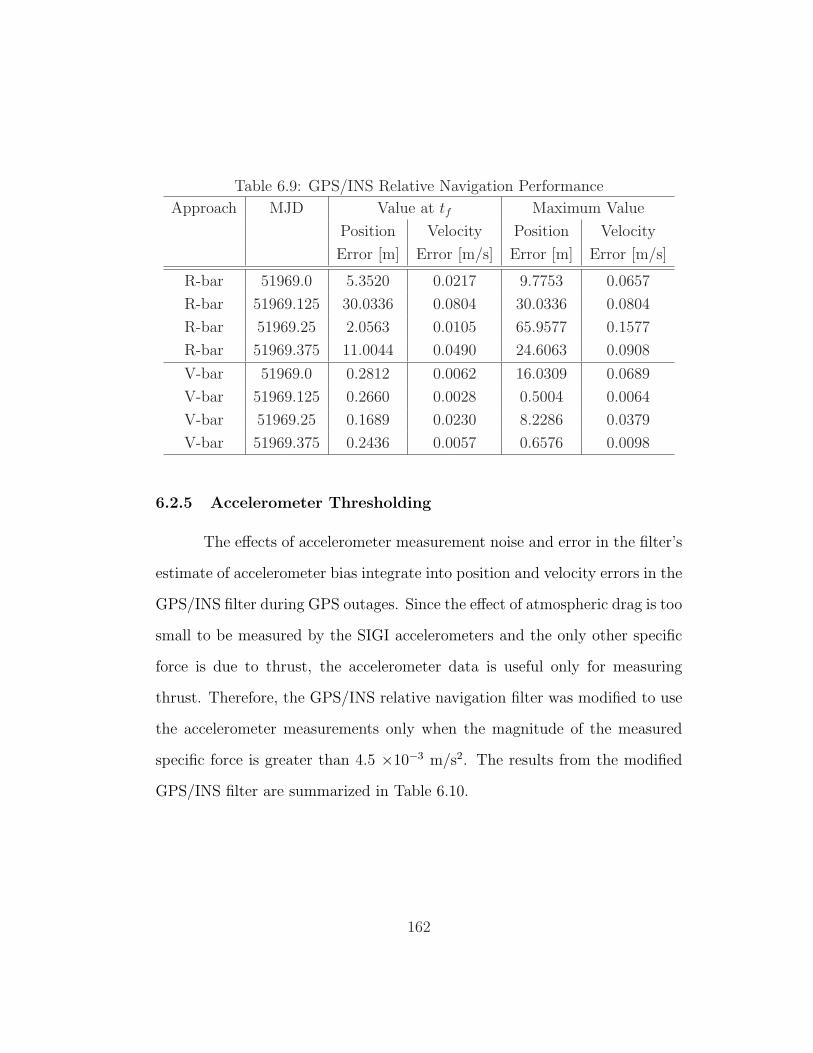
Table 6.9: GPS/INS Relative Navigation Performance
Approach MJD Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
R-bar 51969.0 5.3520 0.0217 9.7753 0.0657
R-bar 51969.125 30.0336 0.0804 30.0336 0.0804
R-bar 51969.25 2.0563 0.0105 65.9577 0.1577
R-bar 51969.375 11.0044 0.0490 24.6063 0.0908
V-bar 51969.0 0.2812 0.0062 16.0309 0.0689
V-bar 51969.125 0.2660 0.0028 0.5004 0.0064
V-bar 51969.25 0.1689 0.0230 8.2286 0.0379
V-bar 51969.375 0.2436 0.0057 0.6576 0.0098
6.2.5 Accelerometer Thresholding
The effects of accelerometer measurement noise and error in the filter’s
estimate of accelerometer bias integrate into position and velocity errors in the
GPS/INS filter during GPS outages. Since the effect of atmospheric drag is too
small to be measured by the SIGI accelerometers and the only other specific
force is due to thrust, the accelerometer data is useful only for measuring
thrust. Therefore, the GPS/INS relative navigation filter was modified to use
the accelerometer measurements only when the magnitude of the measured
specific force is greater than 4.5 ×10−3 m/s2. The results from the modified
GPS/INS filter are summarized in Table 6.10.
162
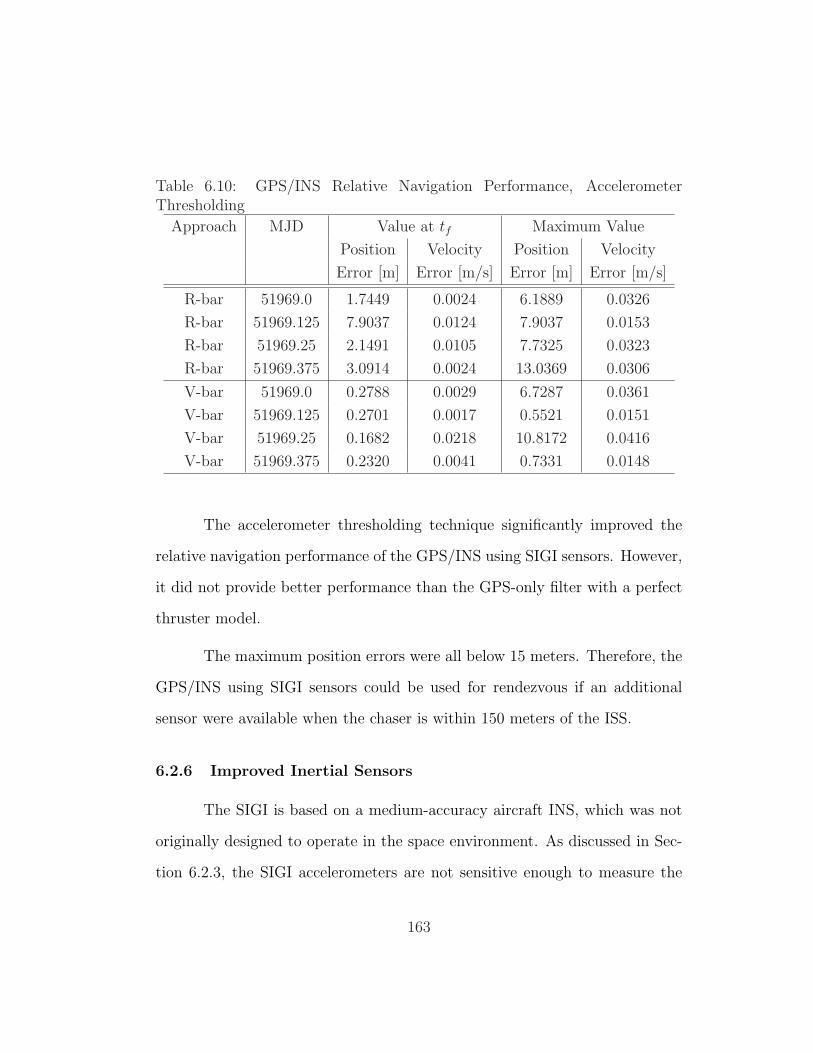
Table 6.10: GPS/INS Relative Navigation Performance, AccelerometerThresholding
Approach MJD Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
R-bar 51969.0 1.7449 0.0024 6.1889 0.0326
R-bar 51969.125 7.9037 0.0124 7.9037 0.0153
R-bar 51969.25 2.1491 0.0105 7.7325 0.0323
R-bar 51969.375 3.0914 0.0024 13.0369 0.0306
V-bar 51969.0 0.2788 0.0029 6.7287 0.0361
V-bar 51969.125 0.2701 0.0017 0.5521 0.0151
V-bar 51969.25 0.1682 0.0218 10.8172 0.0416
V-bar 51969.375 0.2320 0.0041 0.7331 0.0148
The accelerometer thresholding technique significantly improved the
relative navigation performance of the GPS/INS using SIGI sensors. However,
it did not provide better performance than the GPS-only filter with a perfect
thruster model.
The maximum position errors were all below 15 meters. Therefore, the
GPS/INS using SIGI sensors could be used for rendezvous if an additional
sensor were available when the chaser is within 150 meters of the ISS.
6.2.6 Improved Inertial Sensors
The SIGI is based on a medium-accuracy aircraft INS, which was not
originally designed to operate in the space environment. As discussed in Sec-
tion 6.2.3, the SIGI accelerometers are not sensitive enough to measure the
163
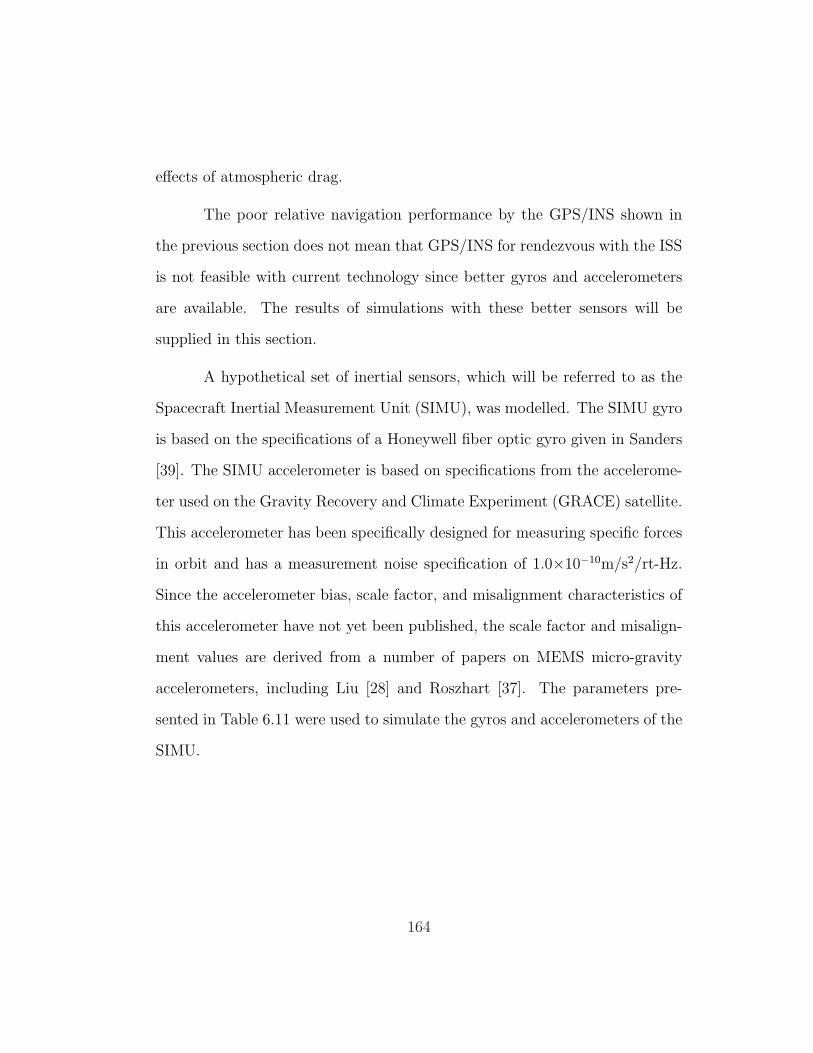
effects of atmospheric drag.
The poor relative navigation performance by the GPS/INS shown in
the previous section does not mean that GPS/INS for rendezvous with the ISS
is not feasible with current technology since better gyros and accelerometers
are available. The results of simulations with these better sensors will be
supplied in this section.
A hypothetical set of inertial sensors, which will be referred to as the
Spacecraft Inertial Measurement Unit (SIMU), was modelled. The SIMU gyro
is based on the specifications of a Honeywell fiber optic gyro given in Sanders
[39]. The SIMU accelerometer is based on specifications from the accelerome-
ter used on the Gravity Recovery and Climate Experiment (GRACE) satellite.
This accelerometer has been specifically designed for measuring specific forces
in orbit and has a measurement noise specification of 1.0×10−10m/s2/rt-Hz.
Since the accelerometer bias, scale factor, and misalignment characteristics of
this accelerometer have not yet been published, the scale factor and misalign-
ment values are derived from a number of papers on MEMS micro-gravity
accelerometers, including Liu [28] and Roszhart [37]. The parameters pre-
sented in Table 6.11 were used to simulate the gyros and accelerometers of the
SIMU.
164
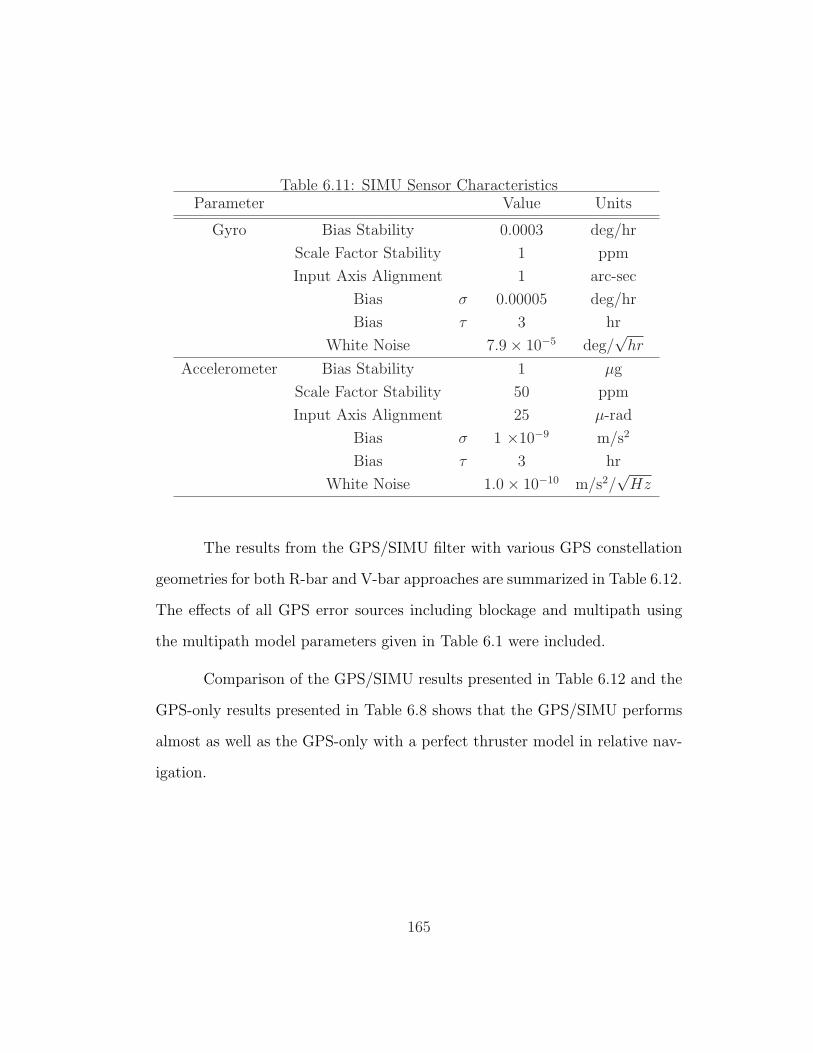
Table 6.11: SIMU Sensor CharacteristicsParameter Value Units
Gyro Bias Stability 0.0003 deg/hr
Scale Factor Stability 1 ppm
Input Axis Alignment 1 arc-sec
Bias σ 0.00005 deg/hr
Bias τ 3 hr
White Noise 7.9× 10−5 deg/√
hr
Accelerometer Bias Stability 1 µg
Scale Factor Stability 50 ppm
Input Axis Alignment 25 µ-rad
Bias σ 1 ×10−9 m/s2
Bias τ 3 hr
White Noise 1.0× 10−10 m/s2/√
Hz
The results from the GPS/SIMU filter with various GPS constellation
geometries for both R-bar and V-bar approaches are summarized in Table 6.12.
The effects of all GPS error sources including blockage and multipath using
the multipath model parameters given in Table 6.1 were included.
Comparison of the GPS/SIMU results presented in Table 6.12 and the
GPS-only results presented in Table 6.8 shows that the GPS/SIMU performs
almost as well as the GPS-only with a perfect thruster model in relative nav-
igation.
165
Table 6.12: GPS/SIMU Relative Navigation Performance
Approach MJD Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
R-bar 51969.0 0.8159 0.0019 0.8385 0.0033
R-bar 51969.125 0.9058 0.0020 0.9058 0.0029
R-bar 51969.25 0.7383 0.0014 1.1900 0.0031
R-bar 51969.375 1.0153 0.0021 1.0254 0.0031
V-bar 51969.0 0.2559 0.0011 0.3783 0.0039
V-bar 51969.125 0.2506 0.0007 0.4320 0.0031
V-bar 51969.25 0.2165 0.0009 0.8242 0.0022
V-bar 51969.375 0.2458 0.0008 0.5817 0.0028
Both the GPS-only and GPS/SIMU systems have shown one meter
level performance and both would be capable of rendezvous navigation if an
additional rendezvous sensor were available to provide aiding after the chaser
closes to within 10 to 20 meters of the ISS. Therefore, it has been demonstrated
that it is feasible for a state-of-the-art GPS/INS to be used for spacecraft
rendezvous.
The relative navigation performance of both systems is limited by the
accuracy of the GPS measurements. The GPS/INS is also limited by the
quality of the inertial sensors. The performance of the GPS-only system is
also limited by the fidelity of its dynamics models. In order for the GPS/INS
system to outperform a GPS-only system, the measurements from the inertial
system must provide more accurate information than the GPS-only system’s
dynamics model.
166
6.2.7 Use of GPS Satellites Below the Horizon
It might be possible to improve relative navigation performance by al-
lowing the use of signals from GPS satellites below the horizon. In order
to investigate this possibility, the minimum elevation angle restriction was re-
placed with an Earth blockage cone in the blockage model. The Earth blockage
cone is defined by a sphere with a radius of 6478 km, which includes 100 km
for the atmosphere.
The blockage model for the chaser spacecraft included blockage cones
for the ISS and the Earth. The blockage model for the ISS included only an
Earth blockage cone. The results from the GPS-only filter are summarized
in Table 6.13 and the results from the GPS/INS filter using SIMU sensors
are summarized in Table 6.14. When these results are compared with those
presented in Tables 6.8 and 6.12, no consistent improvement in the relative
navigation performance is found. The additional GPS measurements did not
improve the relative navigation performance. This may be explained by the
fact that lower elevation signals are more susceptible to multipath.
167
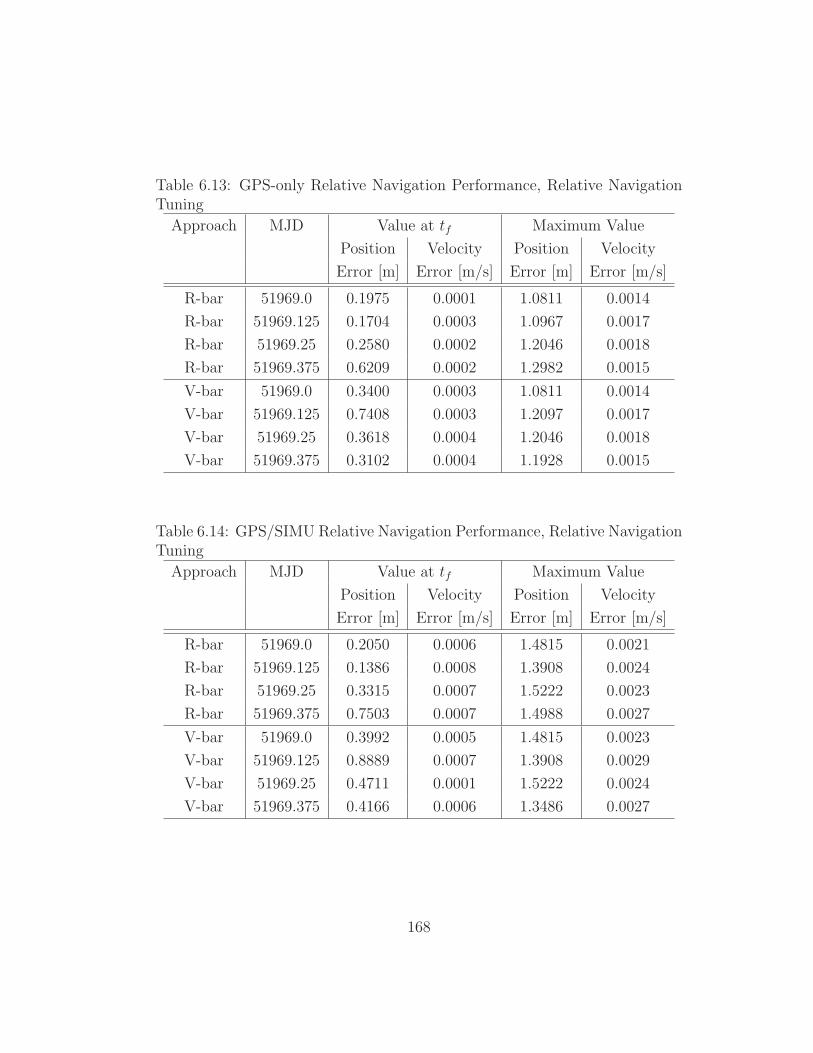
Table 6.13: GPS-only Relative Navigation Performance, Relative NavigationTuning
Approach MJD Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
R-bar 51969.0 0.1975 0.0001 1.0811 0.0014
R-bar 51969.125 0.1704 0.0003 1.0967 0.0017
R-bar 51969.25 0.2580 0.0002 1.2046 0.0018
R-bar 51969.375 0.6209 0.0002 1.2982 0.0015
V-bar 51969.0 0.3400 0.0003 1.0811 0.0014
V-bar 51969.125 0.7408 0.0003 1.2097 0.0017
V-bar 51969.25 0.3618 0.0004 1.2046 0.0018
V-bar 51969.375 0.3102 0.0004 1.1928 0.0015
Table 6.14: GPS/SIMU Relative Navigation Performance, Relative NavigationTuning
Approach MJD Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
R-bar 51969.0 0.2050 0.0006 1.4815 0.0021
R-bar 51969.125 0.1386 0.0008 1.3908 0.0024
R-bar 51969.25 0.3315 0.0007 1.5222 0.0023
R-bar 51969.375 0.7503 0.0007 1.4988 0.0027
V-bar 51969.0 0.3992 0.0005 1.4815 0.0023
V-bar 51969.125 0.8889 0.0007 1.3908 0.0029
V-bar 51969.25 0.4711 0.0001 1.5222 0.0024
V-bar 51969.375 0.4166 0.0006 1.3486 0.0027
168
6.2.8 Gain Scheduling
The results presented in Section 6.2.3 showed that relative navigation
performance during a rendezvous with the ISS can be improved by properly
tuning the dynamics noise. However, this improvement comes at the expense
of absolute navigation performance. It may be possible to minimize the loss
of absolute navigation performance while maintaining good relative naviga-
tion performance by changing the tuning parameters from nominal tuning to
relative navigation tuning at some point as the chaser approaches the ISS.
The GPS-only and GPS/INS filters were modified to switch from nomi-
nal tuning to relative navigation tuning two minutes before less than four GPS
SVs were visible at the chaser. The GPS-only filter used a perfect thruster
model and the GPS/INS filter used the SIMU sensors and all GPS and INS er-
ror sources were simulated for an R-bar approach. The results are summarized
in Table 6.15.
The results show improved relative navigation performance when using
gain scheduling instead of the relative navigation tuning. This suggests that
gain scheduling should be investigated further for this application.
169
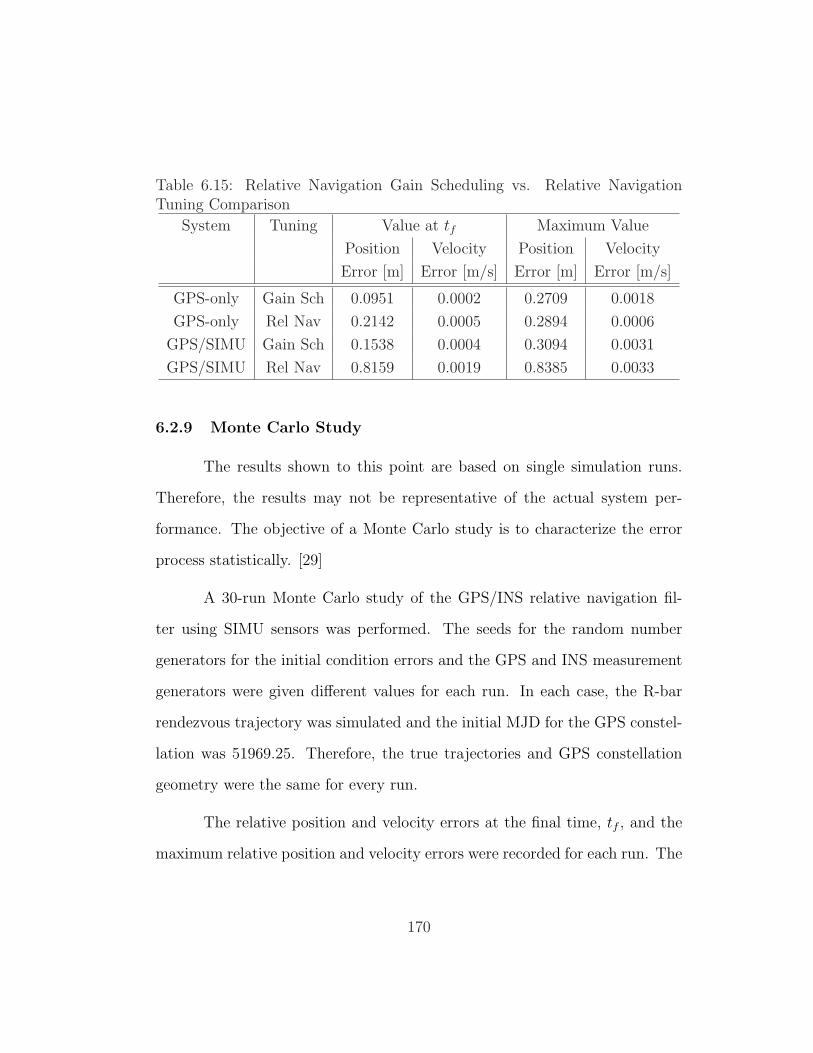
Table 6.15: Relative Navigation Gain Scheduling vs. Relative NavigationTuning Comparison
System Tuning Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
GPS-only Gain Sch 0.0951 0.0002 0.2709 0.0018
GPS-only Rel Nav 0.2142 0.0005 0.2894 0.0006
GPS/SIMU Gain Sch 0.1538 0.0004 0.3094 0.0031
GPS/SIMU Rel Nav 0.8159 0.0019 0.8385 0.0033
6.2.9 Monte Carlo Study
The results shown to this point are based on single simulation runs.
Therefore, the results may not be representative of the actual system per-
formance. The objective of a Monte Carlo study is to characterize the error
process statistically. [29]
A 30-run Monte Carlo study of the GPS/INS relative navigation fil-
ter using SIMU sensors was performed. The seeds for the random number
generators for the initial condition errors and the GPS and INS measurement
generators were given different values for each run. In each case, the R-bar
rendezvous trajectory was simulated and the initial MJD for the GPS constel-
lation was 51969.25. Therefore, the true trajectories and GPS constellation
geometry were the same for every run.
The relative position and velocity errors at the final time, tf , and the
maximum relative position and velocity errors were recorded for each run. The
170
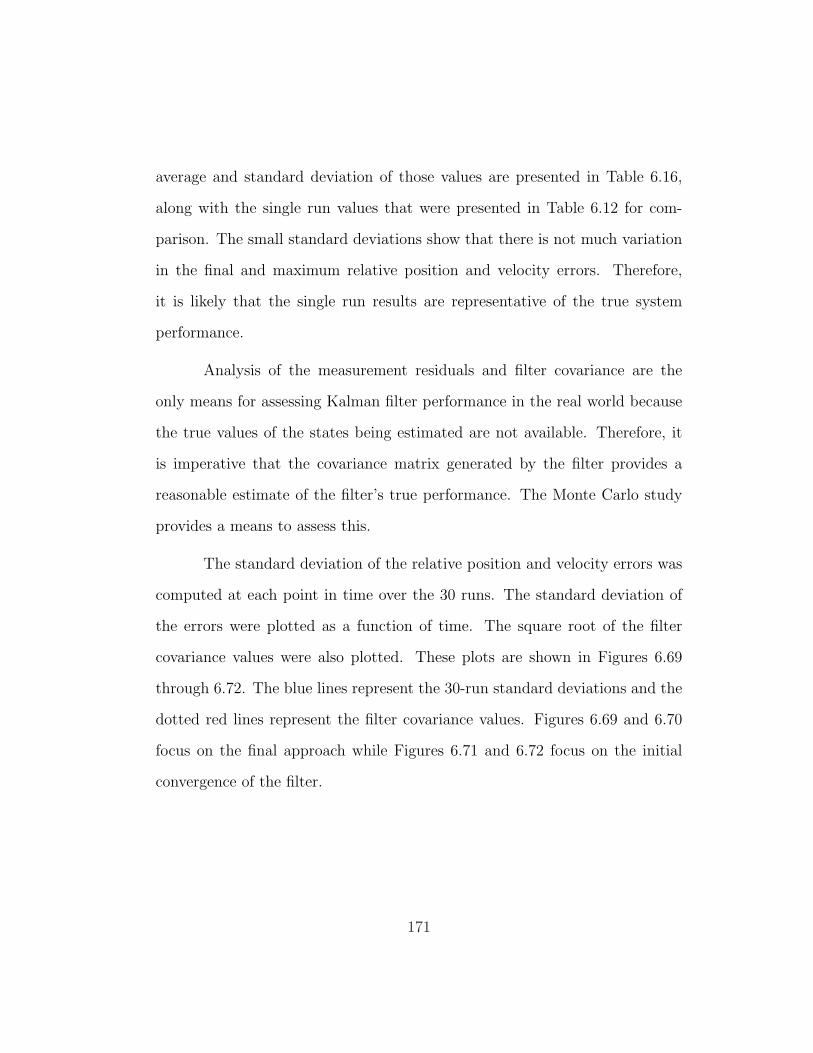
average and standard deviation of those values are presented in Table 6.16,
along with the single run values that were presented in Table 6.12 for com-
parison. The small standard deviations show that there is not much variation
in the final and maximum relative position and velocity errors. Therefore,
it is likely that the single run results are representative of the true system
performance.
Analysis of the measurement residuals and filter covariance are the
only means for assessing Kalman filter performance in the real world because
the true values of the states being estimated are not available. Therefore, it
is imperative that the covariance matrix generated by the filter provides a
reasonable estimate of the filter’s true performance. The Monte Carlo study
provides a means to assess this.
The standard deviation of the relative position and velocity errors was
computed at each point in time over the 30 runs. The standard deviation of
the errors were plotted as a function of time. The square root of the filter
covariance values were also plotted. These plots are shown in Figures 6.69
through 6.72. The blue lines represent the 30-run standard deviations and the
dotted red lines represent the filter covariance values. Figures 6.69 and 6.70
focus on the final approach while Figures 6.71 and 6.72 focus on the initial
convergence of the filter.
171
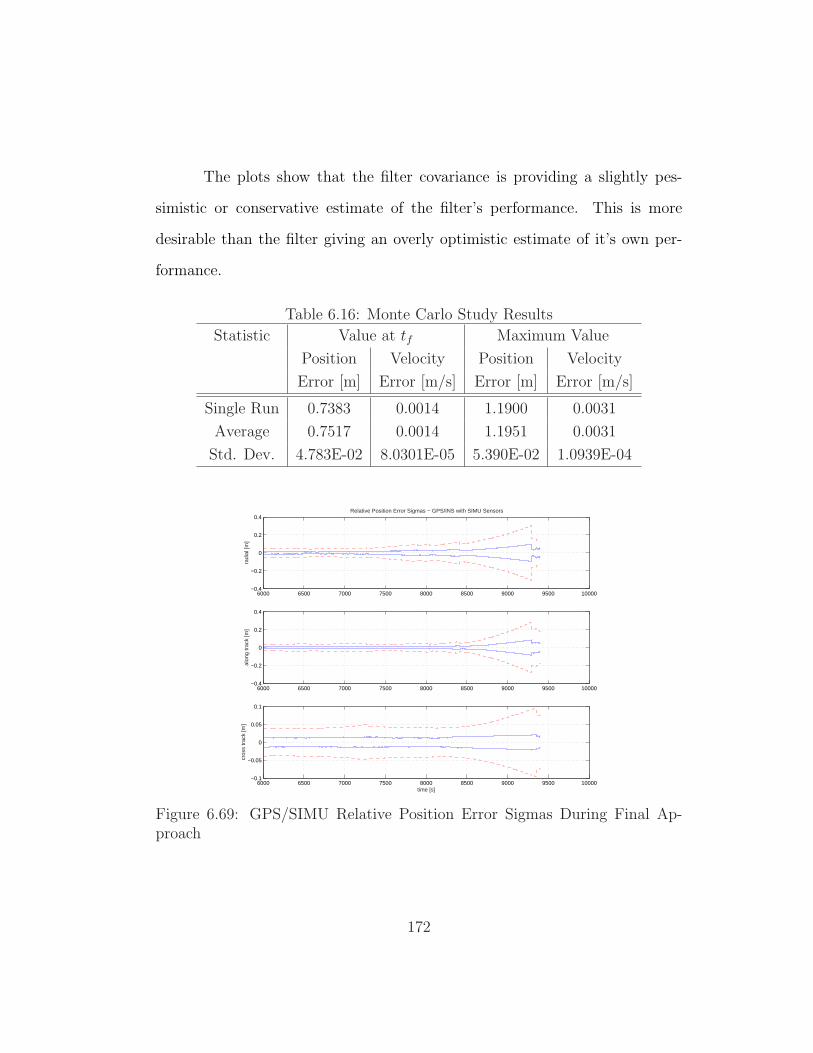
The plots show that the filter covariance is providing a slightly pes-
simistic or conservative estimate of the filter’s performance. This is more
desirable than the filter giving an overly optimistic estimate of it’s own per-
formance.
Table 6.16: Monte Carlo Study Results
Statistic Value at tf Maximum Value
Position Velocity Position Velocity
Error [m] Error [m/s] Error [m] Error [m/s]
Single Run 0.7383 0.0014 1.1900 0.0031
Average 0.7517 0.0014 1.1951 0.0031
Std. Dev. 4.783E-02 8.0301E-05 5.390E-02 1.0939E-04
6000 6500 7000 7500 8000 8500 9000 9500 10000−0.4
−0.2
0
0.2
0.4
radi
al [m
]
Relative Position Error Sigmas − GPS/INS with SIMU Sensors
6000 6500 7000 7500 8000 8500 9000 9500 10000−0.4
−0.2
0
0.2
0.4
alon
g tr
ack
[m]
6000 6500 7000 7500 8000 8500 9000 9500 10000−0.1
−0.05
0
0.05
0.1
time [s]
cros
s tr
ack
[m]
Figure 6.69: GPS/SIMU Relative Position Error Sigmas During Final Ap-proach
172
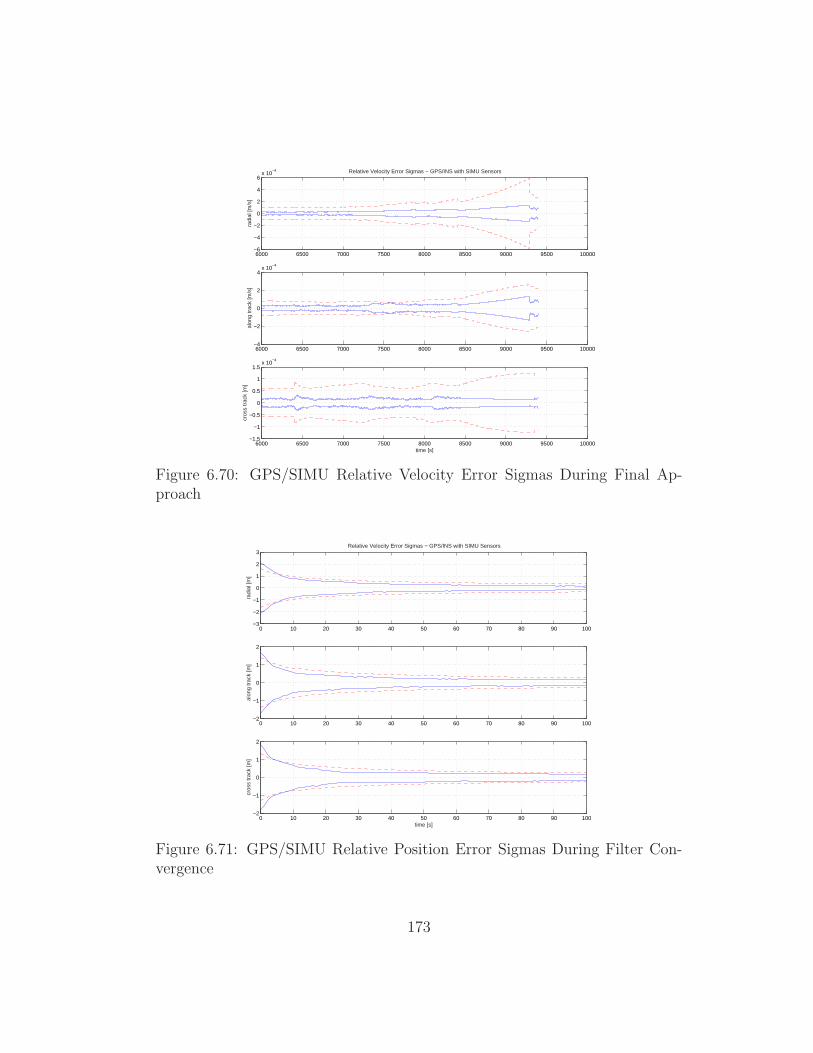
6000 6500 7000 7500 8000 8500 9000 9500 10000−6
−4
−2
0
2
4
6x 10
−4
radi
al [m
/s]
Relative Velocity Error Sigmas − GPS/INS with SIMU Sensors
6000 6500 7000 7500 8000 8500 9000 9500 10000−4
−2
0
2
4x 10
−4
alon
g tr
ack
[m/s
]
6000 6500 7000 7500 8000 8500 9000 9500 10000−1.5
−1
−0.5
0
0.5
1
1.5x 10
−4
time [s]
cros
s tr
ack
[m]
Figure 6.70: GPS/SIMU Relative Velocity Error Sigmas During Final Ap-proach
0 10 20 30 40 50 60 70 80 90 100−3
−2
−1
0
1
2
3
radi
al [m
]
Relative Velocity Error Sigmas − GPS/INS with SIMU Sensors
0 10 20 30 40 50 60 70 80 90 100−2
−1
0
1
2
alon
g tr
ack
[m]
0 10 20 30 40 50 60 70 80 90 100−2
−1
0
1
2
time [s]
cros
s tr
ack
[m]
Figure 6.71: GPS/SIMU Relative Position Error Sigmas During Filter Con-vergence
173
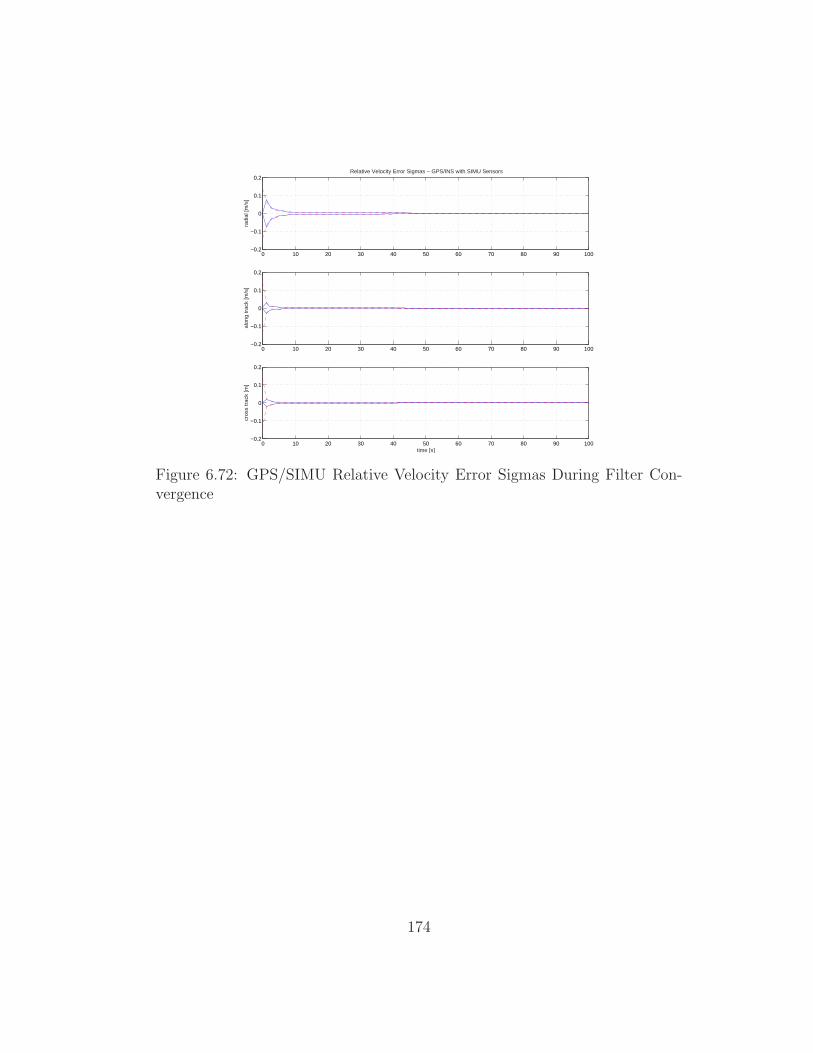
0 10 20 30 40 50 60 70 80 90 100−0.2
−0.1
0
0.1
0.2
radi
al [m
/s]
Relative Velocity Error Sigmas − GPS/INS with SIMU Sensors
0 10 20 30 40 50 60 70 80 90 100−0.2
−0.1
0
0.1
0.2
alon
g tr
ack
[m/s
]
0 10 20 30 40 50 60 70 80 90 100−0.2
−0.1
0
0.1
0.2
time [s]
cros
s tr
ack
[m]
Figure 6.72: GPS/SIMU Relative Velocity Error Sigmas During Filter Con-vergence
174
Chapter 7
Conclusions
The objective of this research is to determine if GPS/INS navigation
during a rendezvous with the ISS is feasible with existing inertial sensor tech-
nology and if not, determine the requirements for future GPS and inertial
sensor technology to make it feasible. This chapter provides a summary of the
results and suggests topics for future research.
7.1 Summary of Results
The results of the relative navigation simulations demonstrate that both
the GPS-only and GPS/INS systems can achieve one meter level relative nav-
igation accuracy during rendezvous with the ISS. Therefore, it is feasible to
use GPS/INS for rendezvous with ISS if state-of-the-art inertial sensors are
used and if an additional rendezvous sensor were available to provide aiding
after the chaser closes to within 10 to 20 meters of the ISS. These simulations
included all significant GPS and INS error sources as well as a high-fidelity
representation of realistic ISS rendezvous trajectories. They also included re-
alistic models of GPS signal blockage and multipath near the ISS.
In order to obtain these results, an error model for an INS operating
175
in orbit has been developed. This model has been used to characterize the
behavior on an INS in orbit. This characterization can be used to understand
how accelerometer and gyro errors affect inertial navigation performance in
space.
A simple model of the blockage of GPS signals by the ISS has been
developed and the effect on GPS navigation near the ISS has been studied. The
blockage simulation showed that aiding of GPS is needed when the spacecraft
approaches within 60 meters the ISS. The multipath simulation results show
the expected trends in the range errors as a function of the GPS satellite
elevation angle, distance from the ISS, the number of multipath rays modelled,
and the radar cross-sectional area of the ISS. Both effects may significantly
degrade GPS navigation near the ISS. These models can be used to predict the
performance obtained by combining various sensors with GPS for navigation
or attitude determination for spacecraft operating near the ISS or other large
reflecting body.
A new statistical multipath model for spacecraft operating near the ISS
has been developed based on terrestrial urban and indoor multipath models.
The model characterizes the multipath environment in terms of the amplitudes,
time delays and phases of the multipath signals, which are used by the C/A
code and carrier phase measurement error models to determine the error in
GPS range measurements.
A complementary extended Kalman filter (EKF) for combining GPS
and INS measurements has been developed. The INS measurements provide
176
the reference trajectory for the EKF, which computes corrections to the ref-
erence trajectory. The reference trajectory is updated with these corrections
each filter cycle. Both absolute and relative navigation filters have been de-
veloped.
During the development of the absolute navigation filter, the navigation
results of GPS C/A code measurements were compared to those resulting
from the use of GPS carrier phase measurements. For absolute navigation,
it was determined that while GPS carrier phase measurements were more
precise than C/A code measurements, the navigation accuracy was actually
better using C/A code measurements. The reason for this is that in the case
of absolute navigation, the filter was not able to adequately allocate errors
between ionospheric delay, GPS SV clock and ephemeris errors, and the integer
ambiguity.
One of the decisions to be made in the development of a GPS relative
navigation system is whether to exchange measurement data or processed state
data. The simulation showed that processing measurements from both chaser
and target vehicles provides an order of magnitude improvement in relative
navigation accuracy over the the use of state vector differencing.
The inertial sensors come into play mostly during the final phase of
rendezvous, where GPS signals are blocked and are subject to multipath and
many small delta-v and attitude maneuvers that disturb the GPS tracking
loops. To demonstrate the value of the INS during this time, a realistic ren-
dezvous simulation was developed which includes the effects of gravity and
177
atmospheric drag perturbations as well as delta-v maneuvers planned to cre-
ate a decelerating glideslope trajectory. The results of a GPS-only relative
navigation filter, the GPS/INS relative navigation filter with the SIGI gyros
and accelerometers, and the GPS/INS relative navigation filter with improved
gyros and accelerometers were analyzed and compared.
The effects of filter tuning on the performance of the relative navigation
filters were studied. The results show that filter tuning has a large effect on
the relative navigation accuracy of both the GPS-only and GPS/INS filters.
The effects of GPS constellation geometry and the rendezvous approach
direction were studied. The GPS constellation was moved forward in time to
obtain four different geometrical configurations. The R-bar and V-bar ap-
proach were simulated with each GPS constellation configuration. The results
of this analysis showed that the relative navigation performance is highly de-
pendent on GPS constellation geometry and approach direction.
The results from the simulations using the SIGI sensors have shown that
relative navigation performance of the GPS/INS is not adequate for rendezvous
and is actually worse than a GPS-only system with a perfect thruster model.
The relative navigation performance of the GPS/INS filter during GPS
blockage is limited by the filter’s ability to estimate accelerometer bias. In
order to limit the position error to 1 meter per axis during a 1000-second GPS
blockage, the accelerometer bias needs to be estimated within 2× 10−6 m/s2.
The use of accelerometer thresholding was shown to significantly im-
178
prove the performance of the GPS/INS relative navigation filter using SIGI
sensors. In this case, the maximum relative position error was below 15 me-
ters. Therefore, it would be feasible to use the GPS/INS with SIGI sensors
if an additional rendezvous sensor were available to provide aiding after the
chaser closes to within 150 meters of the ISS.
Comparison of a GPS/INS using state-of-the-art inertial sensors with
a GPS-only filter with a perfect thruster model shows that the improved
GPS/INS performs almost as well as the GPS-only system in relative navi-
gation. Research on micromechanical accelerometers and fiber optic gyros is
likely to yield even better inertial sensors. With these sensors, a GPS/INS will
be able to outperform a GPS-only system in the future.
The accelerometer used on-orbit probably could not be used during the
other flight phases because highly sensitive accelerometers would not become
saturated at high levels of specific force. However, the mass penalty of carrying
two sets of accelerometers would be small if micromechanical accelerometers
are used.
The relative navigation performance of both GPS/INS and GPS-only
navigation systems is limited by the accuracy of the GPS measurements. The
GPS/INS is also limited by the accuracy of the inertial sensors. The perfor-
mance of the GPS-only system is also limited by the fidelity of its dynamics
models. In order for the GPS/INS system to outperform a GPS-only sys-
tem, the measurements from the inertial system must provide more accurate
information than the GPS-only system’s dynamics model.
179
The GPS-only system’s dynamics model for a spacecraft in orbit can be
very accurate if there are no unexpected forces acting on the spacecraft, such
as an unbalanced force due to attitude control thrusters. One of the benefits
of having inertial sensors onboard is that they would be able to sense the un-
expected forces and maintain accurate navigation. This makes the GPS/INS a
more robust solution than the GPS-only, which is needed for manned missions.
Two possible improvements to the relative navigation filters were also
investigated. The use of GPS satellites below the horizon was found not to pro-
vide any improvement to relative navigation performance during a rendezvous
with the ISS.
The other improvement was the use of gain scheduling, where the pro-
cess noise is switched during the flight. This was found to provide some im-
provement in relative navigation performance. Therefore, it is recommended
that gain scheduling be investigated in the future.
The effects of GPS signal blockage and multipath near the ISS on GPS
and GPS/INS navigation are the main focus of this research. However, many
of the results and lessons learned can be applied to other two spacecraft ren-
dezvous problems. For example, during a Hubble telescope servicing mission,
multipath signals reflected off of the telescope could be modelled using the ISS
multipath model.
180
7.2 Future Work
The results of the relative navigation filter simulations suggest that a
different filter formulation may potentially produce better relative navigation
results in periods of GPS blockage. The current filter formulation estimates
the absolute position and velocity of the chaser and target, however, a special
rendezvous filter that estimates the relative position and relative velocity may
be more ideally suited to this problem. But an absolute navigation filter would
still be required for some on-orbit operations.
Another possible approach would be to use a filter that varies the mea-
surement or process noise according to the number of GPS satellites in view.
When there are four or more GPS satellites in view, the filter solution would
put more weight on the measurements, when fewer than four GPS satellites
are in view, the filter would rely more on the dynamics model. Various switch-
ing criteria, such as number of visible GPS satellites and distance from ISS,
should be studied to determine the optimal switching criteria.
Standard avionics-grade accelerometers and gyros are not designed for
space applications, where specific forces are very small and attitude rates are
low. In order to increase the effectiveness of GPS/INS in space, accelerometers
and gyros need to be more sensitive (lower measurement noise) and have well
known and predictable run-to-run and in-run bias behavior. The unique sensor
requirements for accelerometers and gyros operating in space should be studied
and documented. The new sensor requirements will likely require new test
methods and equipment in order to verify on-orbit sensor performance. These
181

new test methods and equipment requirements may also necessitate further
research and development.
Another possible configuration that should be examined is a gyro-free
GPS/INS, where the GPS would be aided by accelerometers with attitude
provided by GPS or some other attitude sensor. This could potentially improve
performance or reduce cost, weight, and power requirements as well as increase
reliability.
In this dissertation, it was assumed that both the chaser and target
vehicle were each equipped with a single, zenith-pointed antenna and that the
spacecraft always maintained the zenith-pointed attitude. In a rendezvous
scenario, the attitude of the spacecraft is just as important as its position
and velocity. Therefore, the addition of spacecraft attitude modelling would
greatly enhance the value of the GPS/INS rendezvous simulation. Further-
more, the ability to study multiple GPS antennas and various GPS antenna
locations could potentially allow designers to minimize the effects of blockage
and multipath.
The GPS/INS simulation assumed that the GPS receiver is immediately
able to resume tracking satellites after an outage due to blockage, which is not
realistic. In a tightly integrated GPS/INS, the GPS receiver tracking loops
are aided by the INS so that it can recover faster. Therefore, a tracking loop
simulation capability should be added.
182
The incorporation of better models for the GPS SV clock and ephemeris
errors, ionospheric delays and the addition of cycle slips would improve the
fidelity of the simulation.
The blockage and multipath models presented in this dissertation are
theoretical and have not been validated with flight data. After numerous dis-
cussion with engineers at the NASA Johnson Space Center, it was determined
that the data needed to validate these models currently does not exist. With-
out this data, engineers are designing autonomous rendezvous systems “in the
blind.” Therefore, it is recommended that a flight experiment specifically de-
signed to collect GPS multipath and blockage information in the vicinity of
the ISS be performed as soon as possible.
Researchers have developed many ways to minimize the effects of mul-
tipath on GPS navigation. Some of these methods include special antennas,
correlators and processing software. For example, the filter could be modified
to increase the measurement noise as the chaser approaches the ISS. The ef-
fectiveness of these techniques in the rendezvous scenario could be evaluated
using this simulation.
The effects of signal blockage near the ISS could possibly be reduced by
the addition of measurements from GLONASS or Galileo in the future. The
GPS/INS simulation could also be used to study the addition of rendezvous
sensors such as pseudolites or optical sensors to mitigate the effects of blockage
and multipath.
183
Another possible way to improve the navigation performance near the
ISS might be to allow the use of GPS signals within the ISS blockage cone
since the ISS is not a solid spherical shape. One way to simulate this would be
to randomly allow a certain percentage of the signals within the ISS blockage
cone to be used.
Finally, this simulation could be used to study the emergency egress
from ISS scenario. In this case, the GPS/INS would be required to initialize
and align itself in flight. The GPS signal blockage due to the ISS could have a
significant impact on the time required to lock on to four GPS satellites. This
may impact the ability to perform the de-orbit maneuver in an accurate and
timely manner.
184

Appendices
185
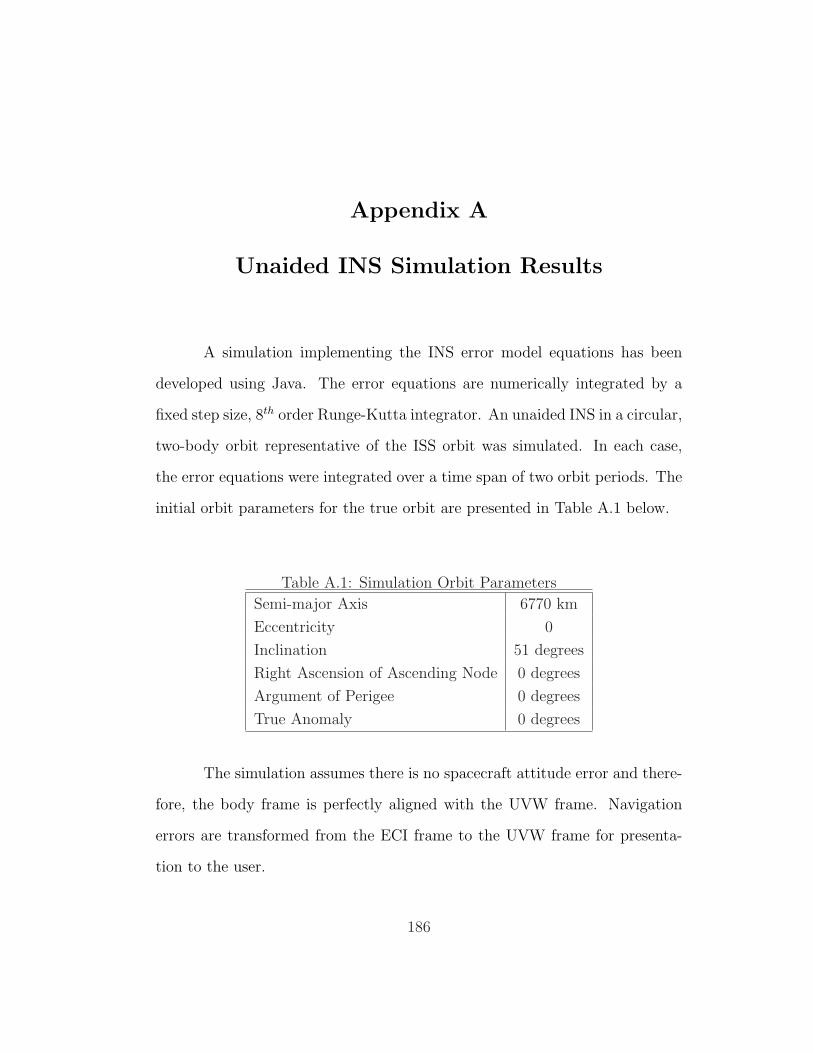
Appendix A
Unaided INS Simulation Results
A simulation implementing the INS error model equations has been
developed using Java. The error equations are numerically integrated by a
fixed step size, 8th order Runge-Kutta integrator. An unaided INS in a circular,
two-body orbit representative of the ISS orbit was simulated. In each case,
the error equations were integrated over a time span of two orbit periods. The
initial orbit parameters for the true orbit are presented in Table A.1 below.
Table A.1: Simulation Orbit Parameters
Semi-major Axis 6770 km
Eccentricity 0
Inclination 51 degrees
Right Ascension of Ascending Node 0 degrees
Argument of Perigee 0 degrees
True Anomaly 0 degrees
The simulation assumes there is no spacecraft attitude error and there-
fore, the body frame is perfectly aligned with the UVW frame. Navigation
errors are transformed from the ECI frame to the UVW frame for presenta-
tion to the user.
186

The initial position and velocity errors for the simulation are specified
in the UVW by the user and then transformed to the ECI frame by using the
inverse transformations.
The results of this simulation are presented in this section. Each sim-
ulation run includes only one error source. Since the INS error equations are
linear, the concepts of superposition and scaling apply.
A.1 Unforced Error Response
The unforced error response is due only to errors in the initial conditions
of the INS. In this case, the difference between two nearby, nearly circular two
body orbits is being computed as a function of time. If the INS indicated orbit
is considered to be the primary satellite and the true orbit is considered to be
the secondary satellite, the position and velocity errors should behave accord-
ing to the Clohessy-Wiltshire (CW) equations, also known as Hill’s equations.
In fact, for this case, there exists a closed form solution to these equations,
which is presented in Vallado. [42]
Since there are no gyro errors, the platform tilt angles behave according
to:
φB = −ωBIB × φB (A.1)
In the case of a two-body orbit, the angular velocity of the body frame with
respect to the ECI frame is constant:
ωBIB =
[0 0 h/r2
]T(A.2)
187

The components of equation (A.1) become:
φ1 +(
hr2
)2φ1 = 0
φ2 +(
hr2
)2φ2 = 0
φ3 = 0
(A.3)
Therefore, the tilts about the radial and along track directions are
simple harmonic oscillators and the tilt about the cross track direction is a
constant.
The period of these oscillations coincides with the orbit period. There-
fore, the Schuler period for an INS in orbit is equal to the period of its orbit
instead of the 84.4 minute period associated with a terrestrial INS.
A.1.1 Response to Initial Position Errors
The propagation of navigation errors due to initial position errors are
presented in this section. In each case, the errors behave according to the CW
equations as expected.
Figure A.1 shows the error history due to a 1-meter initial radial posi-
tion error. The along-track position error grows without bound and is almost
40 meters after one orbit period.
188
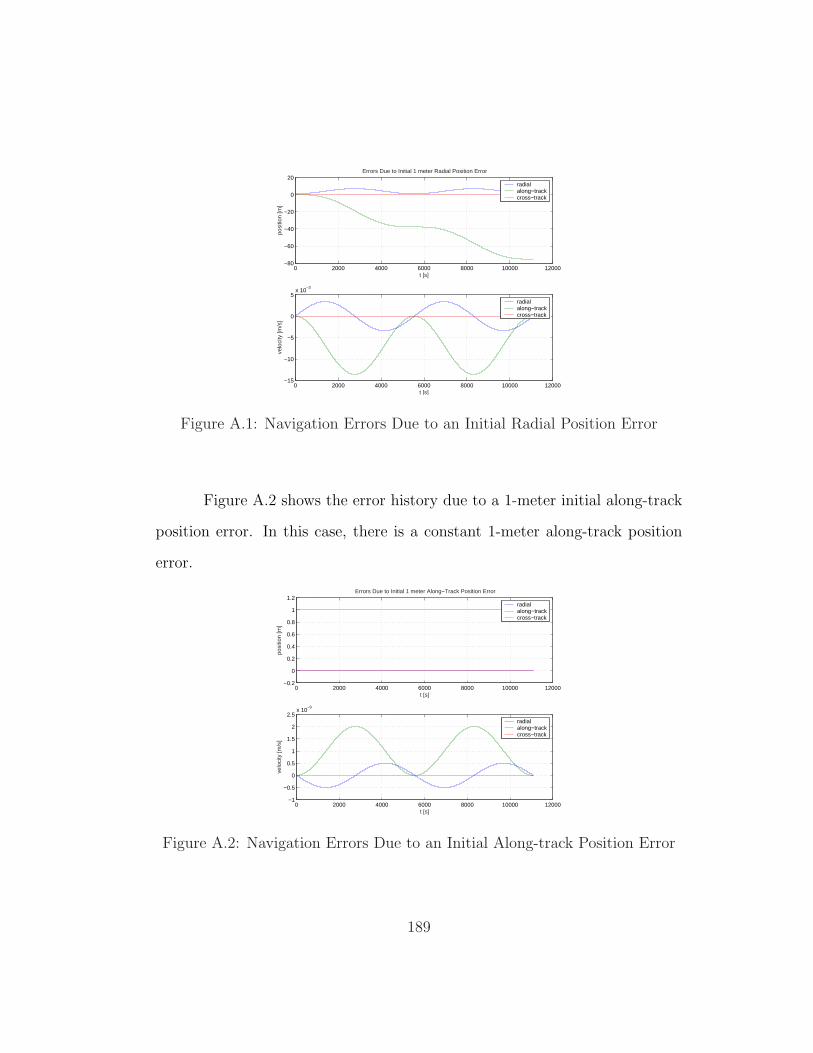
0 2000 4000 6000 8000 10000 12000−80
−60
−40
−20
0
20
t [s]po
sitio
n [m
]
Errors Due to Initial 1 meter Radial Position Error
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−15
−10
−5
0
5x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.1: Navigation Errors Due to an Initial Radial Position Error
Figure A.2 shows the error history due to a 1-meter initial along-track
position error. In this case, there is a constant 1-meter along-track position
error.
0 2000 4000 6000 8000 10000 12000−0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s]
posi
tion
[m]
Errors Due to Initial 1 meter Along−Track Position Error
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1
−0.5
0
0.5
1
1.5
2
2.5x 10
−9
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.2: Navigation Errors Due to an Initial Along-track Position Error
189
Figure A.3 shows the error history due to a 1-meter initial cross-track
position error. In this case, the cross-track position error oscillates between
+1 and -1 meters with a period coincident with the orbit period. No radial or
along-track errors are induced because the cross-track direction is not coupled
with the other directions.
0 2000 4000 6000 8000 10000 12000−1
−0.5
0
0.5
1
t [s]
posi
tion
[m]
Errors Due to Initial 1 meter Cross−Track Position Error
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1.5
−1
−0.5
0
0.5
1
1.5x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.3: Navigation Errors Due to an Initial Cross-track Position Error
A.1.2 Response to Initial Velocity Errors
The propagation of navigation errors due to initial velocity errors are
presented in this section. In each case, the errors behave according to the CW
equations as expected.
Figure A.4 shows the error history due to a 0.1-m/s initial radial ve-
locity error. In this case, large but stable position errors are observed. The
radial position error oscillates between +100 and -100 meters and the along-
190
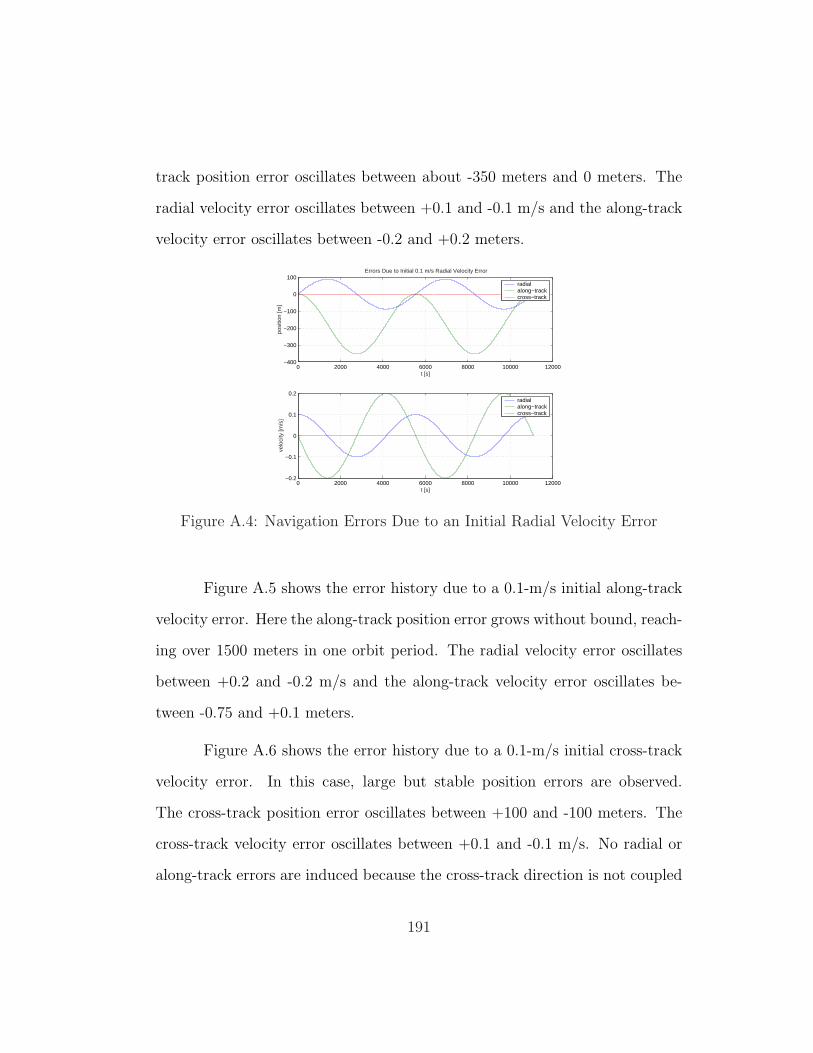
track position error oscillates between about -350 meters and 0 meters. The
radial velocity error oscillates between +0.1 and -0.1 m/s and the along-track
velocity error oscillates between -0.2 and +0.2 meters.
0 2000 4000 6000 8000 10000 12000−400
−300
−200
−100
0
100
t [s]
posi
tion
[m]
Errors Due to Initial 0.1 m/s Radial Velocity Error
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.2
−0.1
0
0.1
0.2
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.4: Navigation Errors Due to an Initial Radial Velocity Error
Figure A.5 shows the error history due to a 0.1-m/s initial along-track
velocity error. Here the along-track position error grows without bound, reach-
ing over 1500 meters in one orbit period. The radial velocity error oscillates
between +0.2 and -0.2 m/s and the along-track velocity error oscillates be-
tween -0.75 and +0.1 meters.
Figure A.6 shows the error history due to a 0.1-m/s initial cross-track
velocity error. In this case, large but stable position errors are observed.
The cross-track position error oscillates between +100 and -100 meters. The
cross-track velocity error oscillates between +0.1 and -0.1 m/s. No radial or
along-track errors are induced because the cross-track direction is not coupled
191
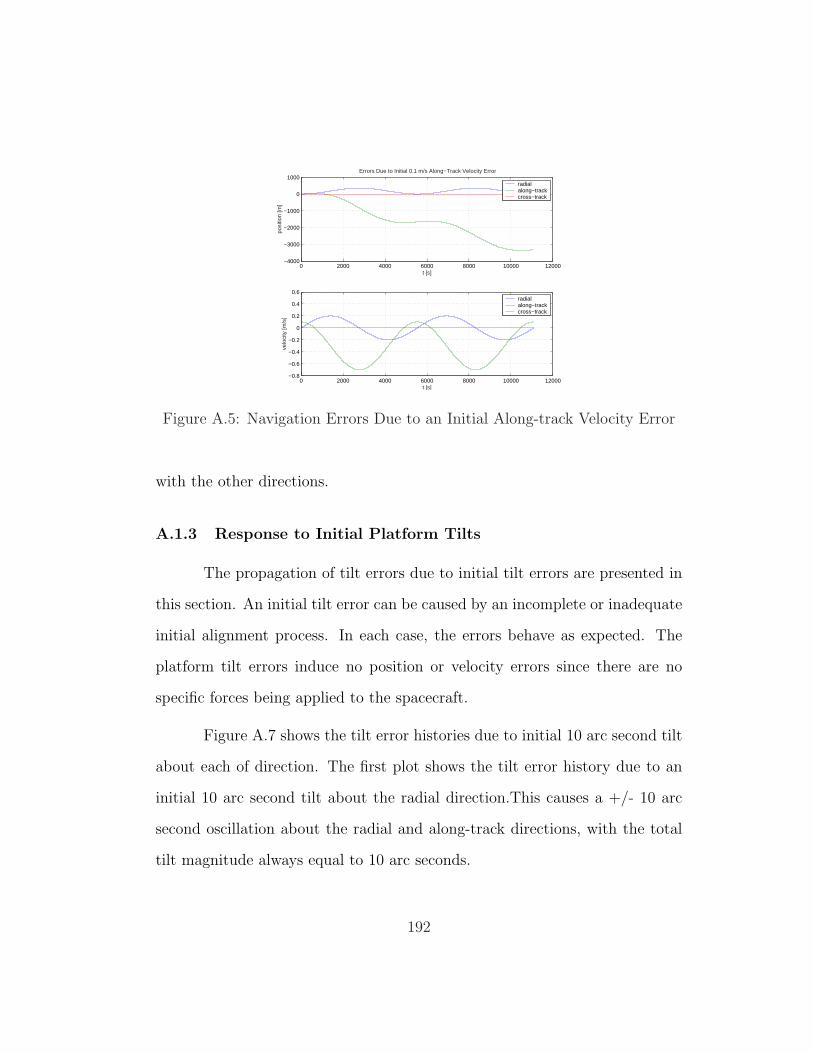
0 2000 4000 6000 8000 10000 12000−4000
−3000
−2000
−1000
0
1000
t [s]po
sitio
n [m
]
Errors Due to Initial 0.1 m/s Along−Track Velocity Error
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.5: Navigation Errors Due to an Initial Along-track Velocity Error
with the other directions.
A.1.3 Response to Initial Platform Tilts
The propagation of tilt errors due to initial tilt errors are presented in
this section. An initial tilt error can be caused by an incomplete or inadequate
initial alignment process. In each case, the errors behave as expected. The
platform tilt errors induce no position or velocity errors since there are no
specific forces being applied to the spacecraft.
Figure A.7 shows the tilt error histories due to initial 10 arc second tilt
about each of direction. The first plot shows the tilt error history due to an
initial 10 arc second tilt about the radial direction.This causes a +/- 10 arc
second oscillation about the radial and along-track directions, with the total
tilt magnitude always equal to 10 arc seconds.
192
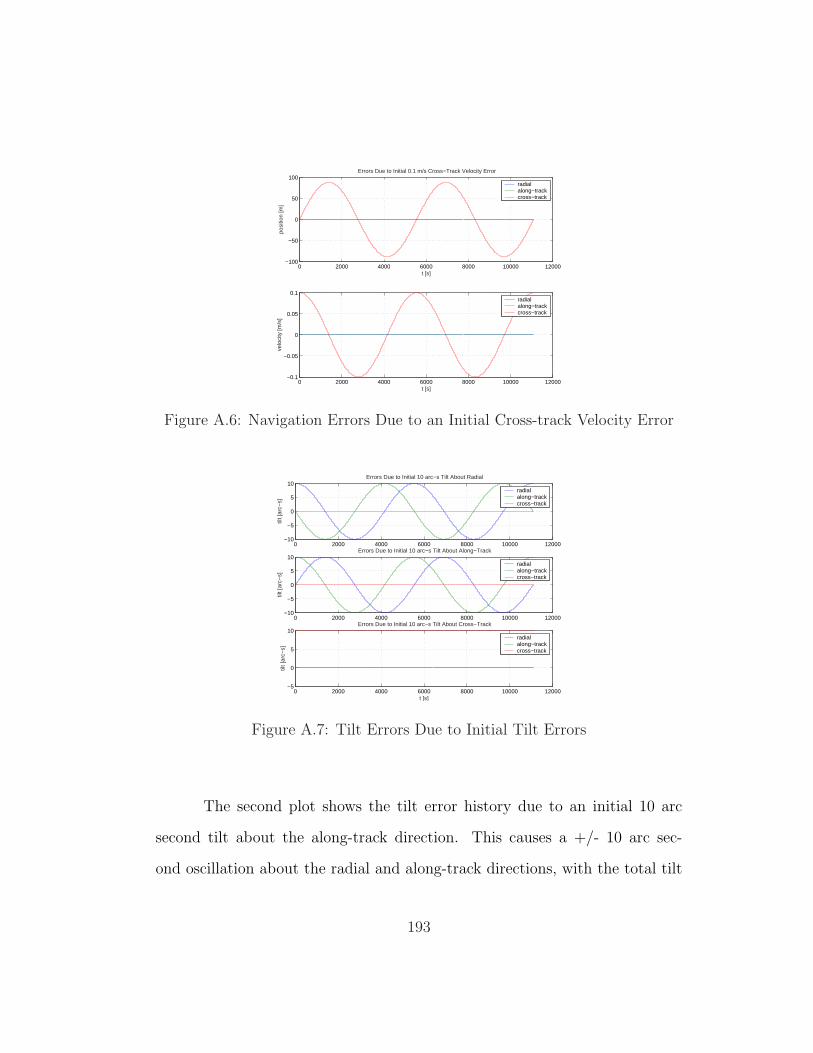
0 2000 4000 6000 8000 10000 12000−100
−50
0
50
100
t [s]po
sitio
n [m
]
Errors Due to Initial 0.1 m/s Cross−Track Velocity Error
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.1
−0.05
0
0.05
0.1
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.6: Navigation Errors Due to an Initial Cross-track Velocity Error
0 2000 4000 6000 8000 10000 12000−10
−5
0
5
10
tilt [
arc−
s]
Errors Due to Initial 10 arc−s Tilt About Radial
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−10
−5
0
5
10
tilt [
arc−
s]
Errors Due to Initial 10 arc−s Tilt About Along−Track
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−5
0
5
10
t [s]
tilt [
arc−
s]
Errors Due to Initial 10 arc−s Tilt About Cross−Track
radialalong−trackcross−track
Figure A.7: Tilt Errors Due to Initial Tilt Errors
The second plot shows the tilt error history due to an initial 10 arc
second tilt about the along-track direction. This causes a +/- 10 arc sec-
ond oscillation about the radial and along-track directions, with the total tilt
193
magnitude always equal to 10 arc seconds.
The third plot shows the tilt error history due to an initial 10 arc
second tilt about the cross-track direction. In this case, there is a constant 10
arc second tilt about the cross-track direction because tilts are constant in an
inertial reference frame and the cross-track direction is defined by the orbital
angular momentum vector, which is also fixed in inertial space.
A.2 Forced Error Response
The forced error response is due to imperfect gyro and accelerometer
measurements. Some gyro errors can be observed in the absence of specific
forces. Accelerometer errors are only observed when a specific force is applied
to the vehicle.
A.2.1 Zero Specific Force Case
Gyro errors cause tilt errors which are observable without any specific
forces acting on the vehicle. These errors are presented in this section.
A.2.1.1 Response to Gyro Scale Factor Error and Misalignments
Figure A.8 shows the tilt errors due to gyro scale factor and misalign-
ment errors. Since the angular velocity vector is aligned with the W-axis, only
the following scale factor and misalignment errors are observable: W-axis gyro
scale factor errors, U-axis gyro misalignment about the V-axis and V-axis gyro
misalignment about the U-axis.
194
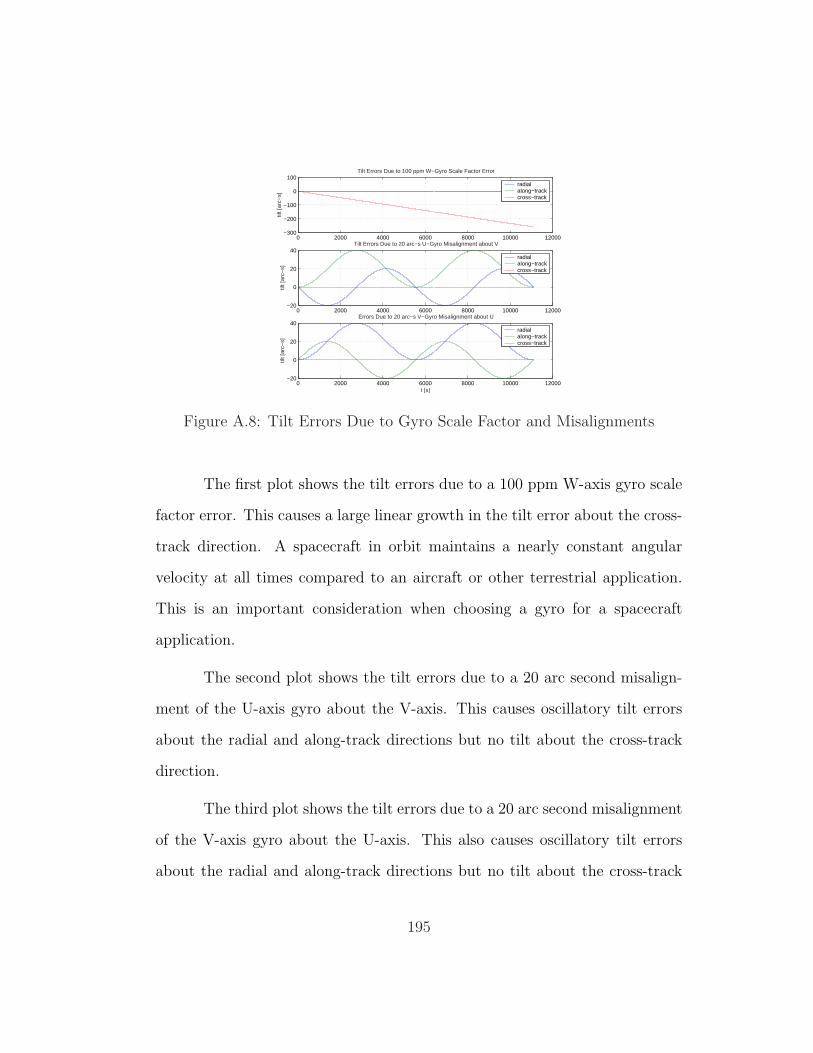
0 2000 4000 6000 8000 10000 12000−300
−200
−100
0
100
tilt [
arc−
s]
Tilt Errors Due to 100 ppm W−Gyro Scale Factor Error
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−20
0
20
40
tilt [
arc−
s]
Tilt Errors Due to 20 arc−s U−Gyro Misalignment about V
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−20
0
20
40
t [s]
tilt [
arc−
s]
Errors Due to 20 arc−s V−Gyro Misalignment about U
radialalong−trackcross−track
Figure A.8: Tilt Errors Due to Gyro Scale Factor and Misalignments
The first plot shows the tilt errors due to a 100 ppm W-axis gyro scale
factor error. This causes a large linear growth in the tilt error about the cross-
track direction. A spacecraft in orbit maintains a nearly constant angular
velocity at all times compared to an aircraft or other terrestrial application.
This is an important consideration when choosing a gyro for a spacecraft
application.
The second plot shows the tilt errors due to a 20 arc second misalign-
ment of the U-axis gyro about the V-axis. This causes oscillatory tilt errors
about the radial and along-track directions but no tilt about the cross-track
direction.
The third plot shows the tilt errors due to a 20 arc second misalignment
of the V-axis gyro about the U-axis. This also causes oscillatory tilt errors
about the radial and along-track directions but no tilt about the cross-track
195
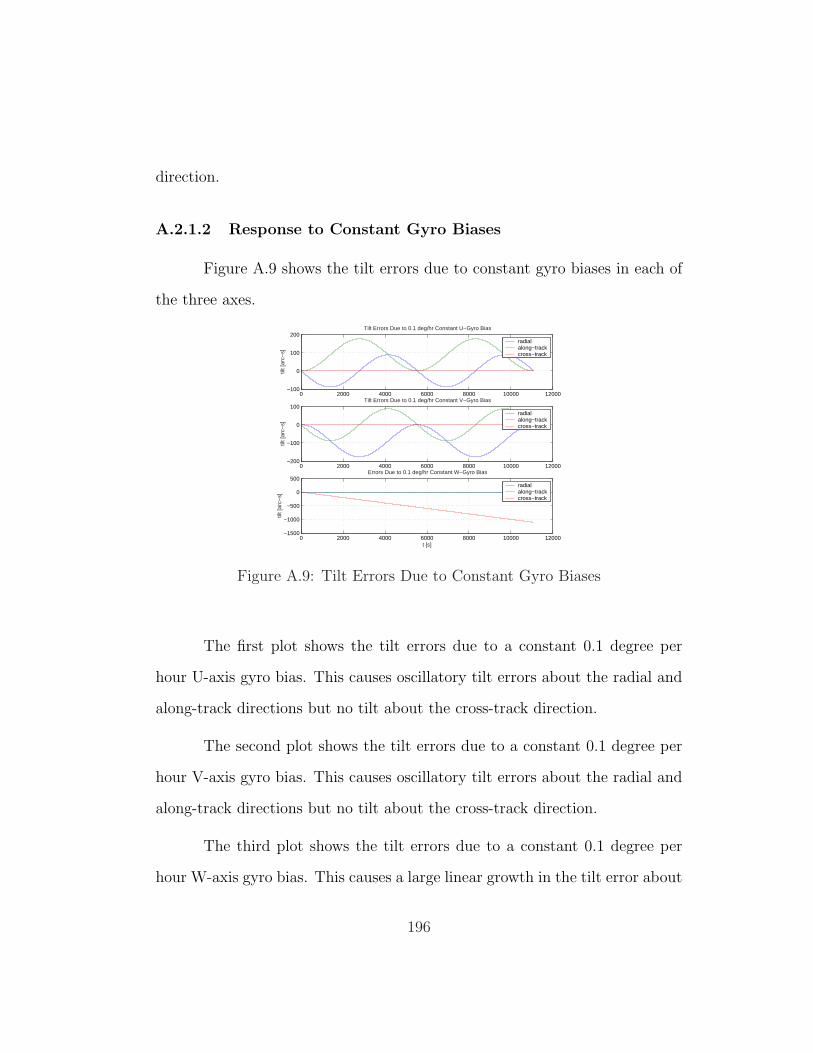
direction.
A.2.1.2 Response to Constant Gyro Biases
Figure A.9 shows the tilt errors due to constant gyro biases in each of
the three axes.
0 2000 4000 6000 8000 10000 12000−100
0
100
200
tilt [
arc−
s]
Tilt Errors Due to 0.1 deg/hr Constant U−Gyro Bias
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−200
−100
0
100
tilt [
arc−
s]
Tilt Errors Due to 0.1 deg/hr Constant V−Gyro Bias
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1500
−1000
−500
0
500
t [s]
tilt [
arc−
s]
Errors Due to 0.1 deg/hr Constant W−Gyro Bias
radialalong−trackcross−track
Figure A.9: Tilt Errors Due to Constant Gyro Biases
The first plot shows the tilt errors due to a constant 0.1 degree per
hour U-axis gyro bias. This causes oscillatory tilt errors about the radial and
along-track directions but no tilt about the cross-track direction.
The second plot shows the tilt errors due to a constant 0.1 degree per
hour V-axis gyro bias. This causes oscillatory tilt errors about the radial and
along-track directions but no tilt about the cross-track direction.
The third plot shows the tilt errors due to a constant 0.1 degree per
hour W-axis gyro bias. This causes a large linear growth in the tilt error about
196
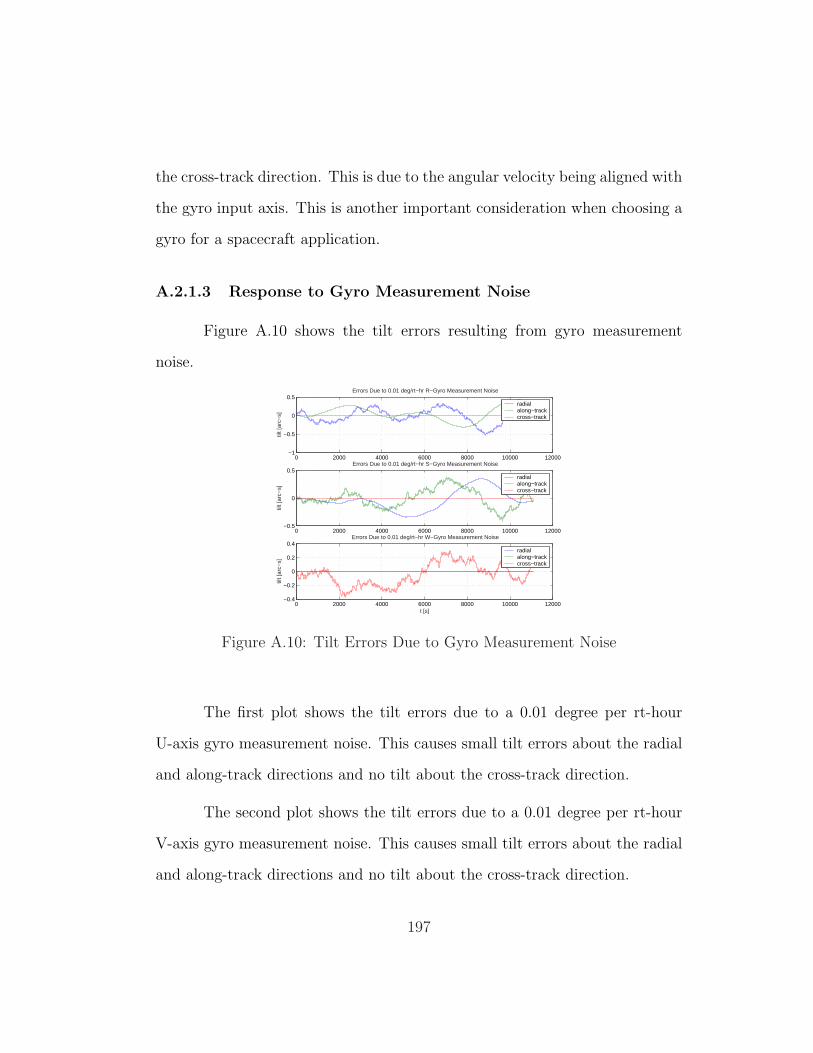
the cross-track direction. This is due to the angular velocity being aligned with
the gyro input axis. This is another important consideration when choosing a
gyro for a spacecraft application.
A.2.1.3 Response to Gyro Measurement Noise
Figure A.10 shows the tilt errors resulting from gyro measurement
noise.
0 2000 4000 6000 8000 10000 12000−1
−0.5
0
0.5
tilt [
arc−
s]
Errors Due to 0.01 deg/rt−hr R−Gyro Measurement Noise
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.5
0
0.5
tilt [
arc−
s]
Errors Due to 0.01 deg/rt−hr S−Gyro Measurement Noise
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.4
−0.2
0
0.2
0.4
t [s]
tilt [
arc−
s]
Errors Due to 0.01 deg/rt−hr W−Gyro Measurement Noise
radialalong−trackcross−track
Figure A.10: Tilt Errors Due to Gyro Measurement Noise
The first plot shows the tilt errors due to a 0.01 degree per rt-hour
U-axis gyro measurement noise. This causes small tilt errors about the radial
and along-track directions and no tilt about the cross-track direction.
The second plot shows the tilt errors due to a 0.01 degree per rt-hour
V-axis gyro measurement noise. This causes small tilt errors about the radial
and along-track directions and no tilt about the cross-track direction.
197
The third plot shows the tilt errors due to a 0.01 degree per rt-hour
W-axis gyro measurement noise. This causes small tilts about the cross-track
direction and no tilt errors about the radial or cross-track directions.
A.2.2 Constant Specific Force Cases
Accelerometer errors are only observable in the presence of specific
forces. In order to observe the position and velocity errors resulting from
imperfect gyros and accelerometers, a 100 µg constant specific force is applied
along one of the true UVW axes.
A.2.2.1 Response to Gyro Errors
The position and velocity errors due to imperfect gyros are presented
in this section. In each case, the platform tilt error caused by the gyro error
leads to an erroneous transformation of the specific force vector from the body
frame to the ECI frame, leading to increasing position and velocity errors.
Figure A.11 shows the errors due to a 100 ppm scale factor error in
the W-axis gyro when a constant specific force is applied in the along-track
direction. This causes a tilt about the cross-track direction which grows lin-
early with time. The tilt causes part of the along-track specific force to be
interpreted as a specific force in the radial direction. This causes position and
velocity errors in radial and along-track directions.
Figure A.12 shows the errors due to a 0.1 deg/hr constant bias in the W-
axis gyro when a constant specific force is applied in the along-track direction.
198
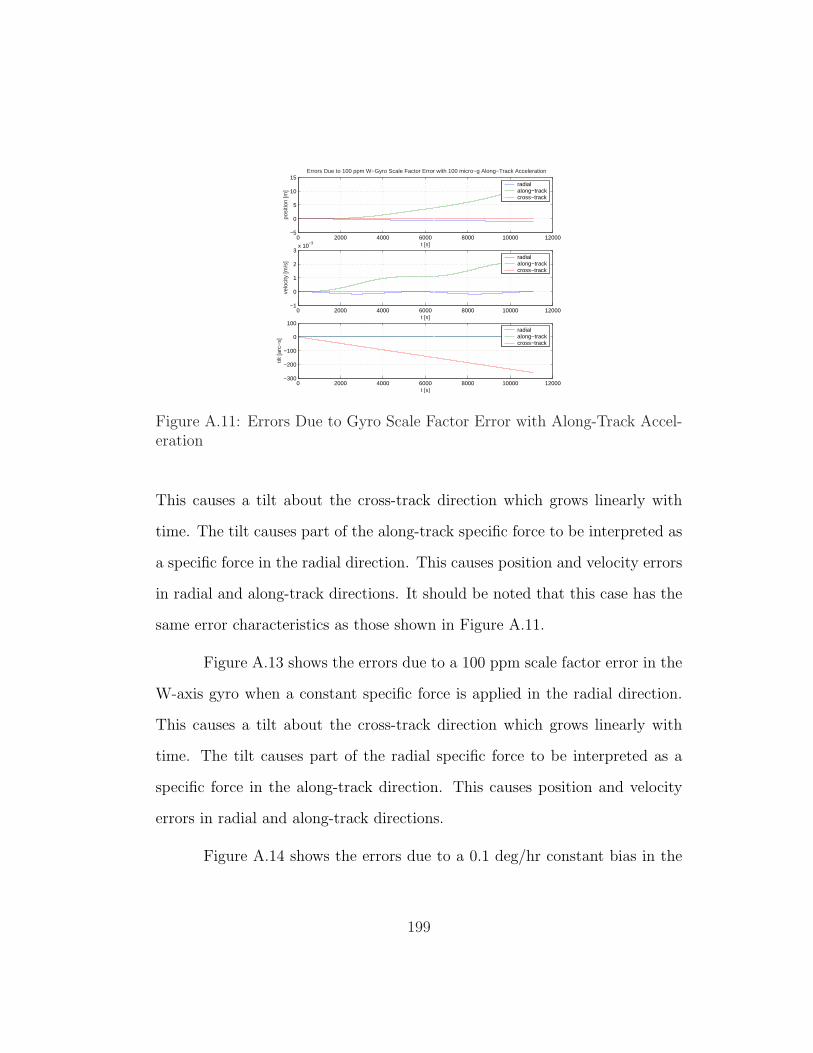
0 2000 4000 6000 8000 10000 12000−5
0
5
10
15
t [s]
posi
tion
[m]
Errors Due to 100 ppm W−Gyro Scale Factor Error with 100 micro−g Along−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1
0
1
2
3x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−300
−200
−100
0
100
t [s]
tilt [
arc−
s]
radialalong−trackcross−track
Figure A.11: Errors Due to Gyro Scale Factor Error with Along-Track Accel-eration
This causes a tilt about the cross-track direction which grows linearly with
time. The tilt causes part of the along-track specific force to be interpreted as
a specific force in the radial direction. This causes position and velocity errors
in radial and along-track directions. It should be noted that this case has the
same error characteristics as those shown in Figure A.11.
Figure A.13 shows the errors due to a 100 ppm scale factor error in the
W-axis gyro when a constant specific force is applied in the radial direction.
This causes a tilt about the cross-track direction which grows linearly with
time. The tilt causes part of the radial specific force to be interpreted as a
specific force in the along-track direction. This causes position and velocity
errors in radial and along-track directions.
Figure A.14 shows the errors due to a 0.1 deg/hr constant bias in the
199

0 2000 4000 6000 8000 10000 12000−20
0
20
40
60
t [s]
posi
tion
[m]
Errors Due to 0.1 deg/hr Constant W−Gyro Bias with 100 micro−g Along−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−5
0
5
10x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1500
−1000
−500
0
500
t [s]
tilt [
arc−
s]
radialalong−trackcross−track
Figure A.12: Errors Due to Constant Gyro Bias with Along-Track Acceleration
W-axis gyro when a constant specific force is applied in the radial direction.
This causes a tilt about the cross-track direction which grows linearly with
time. The tilt causes part of the radial specific force to be interpreted as a
specific force in the along-track direction. This causes position and velocity
errors in radial and along-track directions. It should be noted that this case
has the same error characteristics as those shown in Figure A.13.
Figure A.15 shows the errors due to a 20 arc-second misalignment of
the V-axis gyro about the U-axis when a constant specific force is applied
in the cross-track direction. This causes tilts about the radial and along-
track directions. The tilts cause part of the cross-track specific force to be
interpreted as a specific force in the radial and along-track directions. This
causes the position and velocity errors in the radial and along-track directions
as well as very small position and velocity errors in the cross-track direction,
200
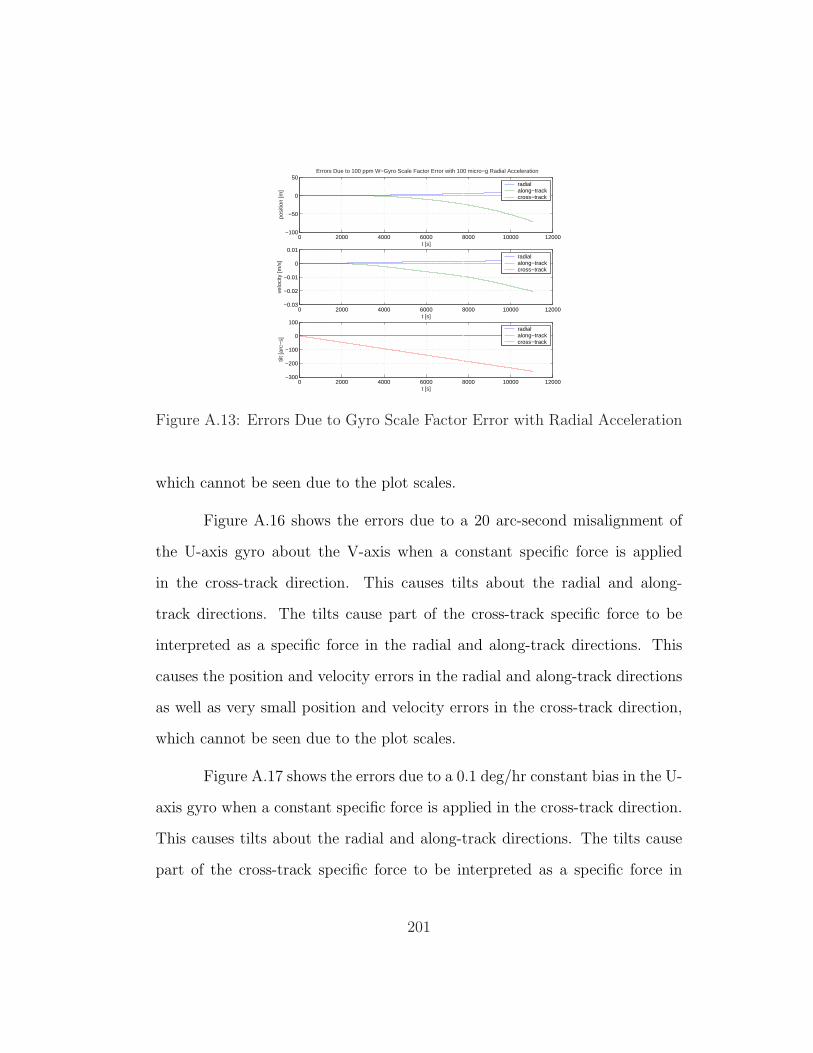
0 2000 4000 6000 8000 10000 12000−100
−50
0
50
t [s]
posi
tion
[m]
Errors Due to 100 ppm W−Gyro Scale Factor Error with 100 micro−g Radial Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.03
−0.02
−0.01
0
0.01
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−300
−200
−100
0
100
t [s]
tilt [
arc−
s]
radialalong−trackcross−track
Figure A.13: Errors Due to Gyro Scale Factor Error with Radial Acceleration
which cannot be seen due to the plot scales.
Figure A.16 shows the errors due to a 20 arc-second misalignment of
the U-axis gyro about the V-axis when a constant specific force is applied
in the cross-track direction. This causes tilts about the radial and along-
track directions. The tilts cause part of the cross-track specific force to be
interpreted as a specific force in the radial and along-track directions. This
causes the position and velocity errors in the radial and along-track directions
as well as very small position and velocity errors in the cross-track direction,
which cannot be seen due to the plot scales.
Figure A.17 shows the errors due to a 0.1 deg/hr constant bias in the U-
axis gyro when a constant specific force is applied in the cross-track direction.
This causes tilts about the radial and along-track directions. The tilts cause
part of the cross-track specific force to be interpreted as a specific force in
201
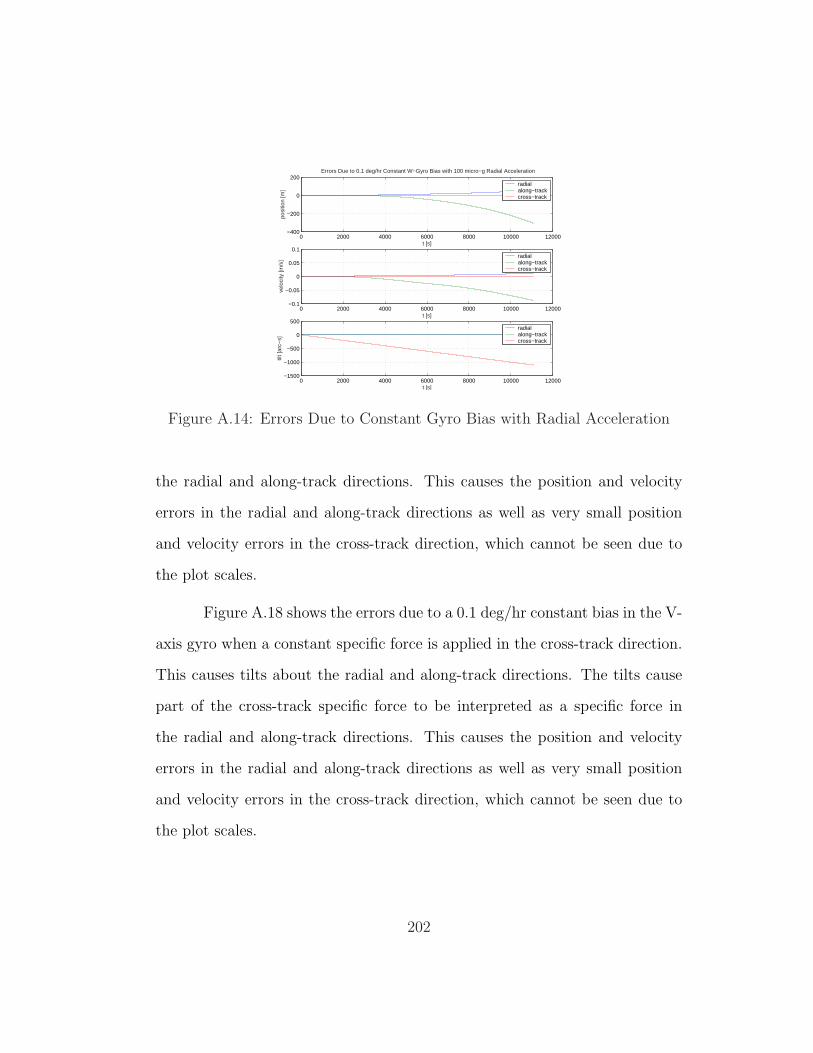
0 2000 4000 6000 8000 10000 12000−400
−200
0
200
t [s]
posi
tion
[m]
Errors Due to 0.1 deg/hr Constant W−Gyro Bias with 100 micro−g Radial Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.1
−0.05
0
0.05
0.1
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1500
−1000
−500
0
500
t [s]
tilt [
arc−
s]
radialalong−trackcross−track
Figure A.14: Errors Due to Constant Gyro Bias with Radial Acceleration
the radial and along-track directions. This causes the position and velocity
errors in the radial and along-track directions as well as very small position
and velocity errors in the cross-track direction, which cannot be seen due to
the plot scales.
Figure A.18 shows the errors due to a 0.1 deg/hr constant bias in the V-
axis gyro when a constant specific force is applied in the cross-track direction.
This causes tilts about the radial and along-track directions. The tilts cause
part of the cross-track specific force to be interpreted as a specific force in
the radial and along-track directions. This causes the position and velocity
errors in the radial and along-track directions as well as very small position
and velocity errors in the cross-track direction, which cannot be seen due to
the plot scales.
202
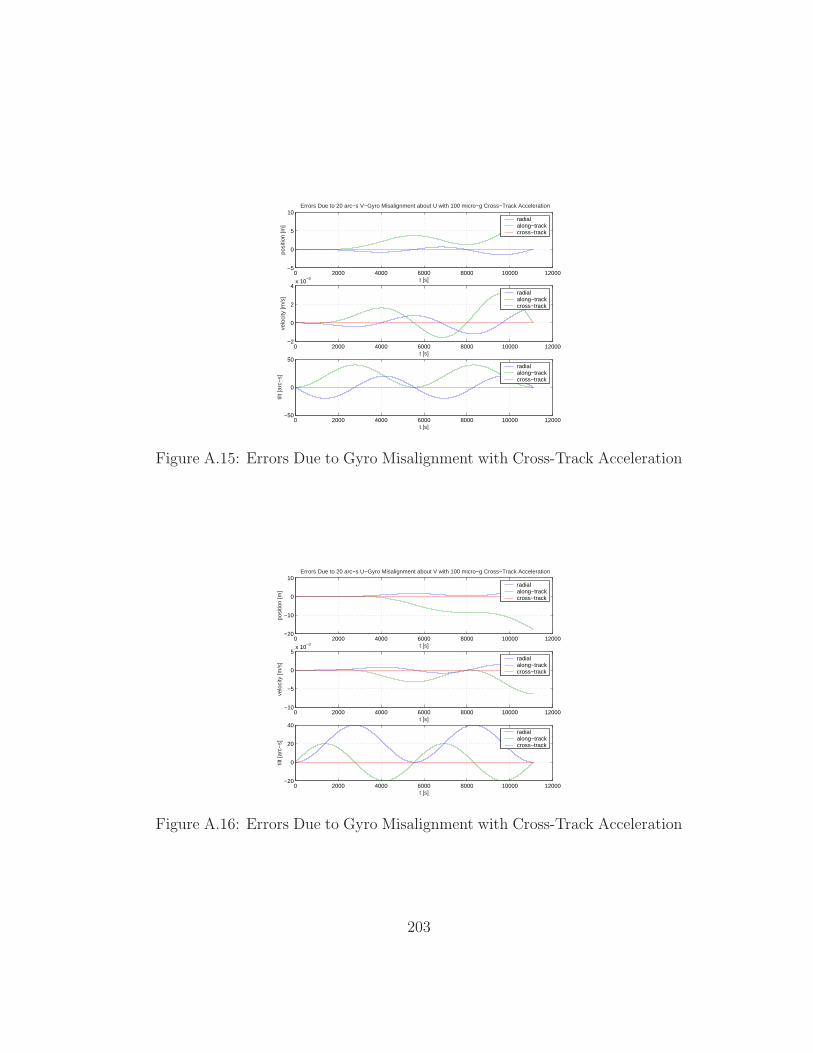
0 2000 4000 6000 8000 10000 12000−5
0
5
10
t [s]po
sitio
n [m
]
Errors Due to 20 arc−s V−Gyro Misalignment about U with 100 micro−g Cross−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−2
0
2
4x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−50
0
50
t [s]
tilt [
arc−
s]
radialalong−trackcross−track
Figure A.15: Errors Due to Gyro Misalignment with Cross-Track Acceleration
0 2000 4000 6000 8000 10000 12000−20
−10
0
10
t [s]
posi
tion
[m]
Errors Due to 20 arc−s U−Gyro Misalignment about V with 100 micro−g Cross−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−10
−5
0
5x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−20
0
20
40
t [s]
tilt [
arc−
s]
radialalong−trackcross−track
Figure A.16: Errors Due to Gyro Misalignment with Cross-Track Acceleration
203
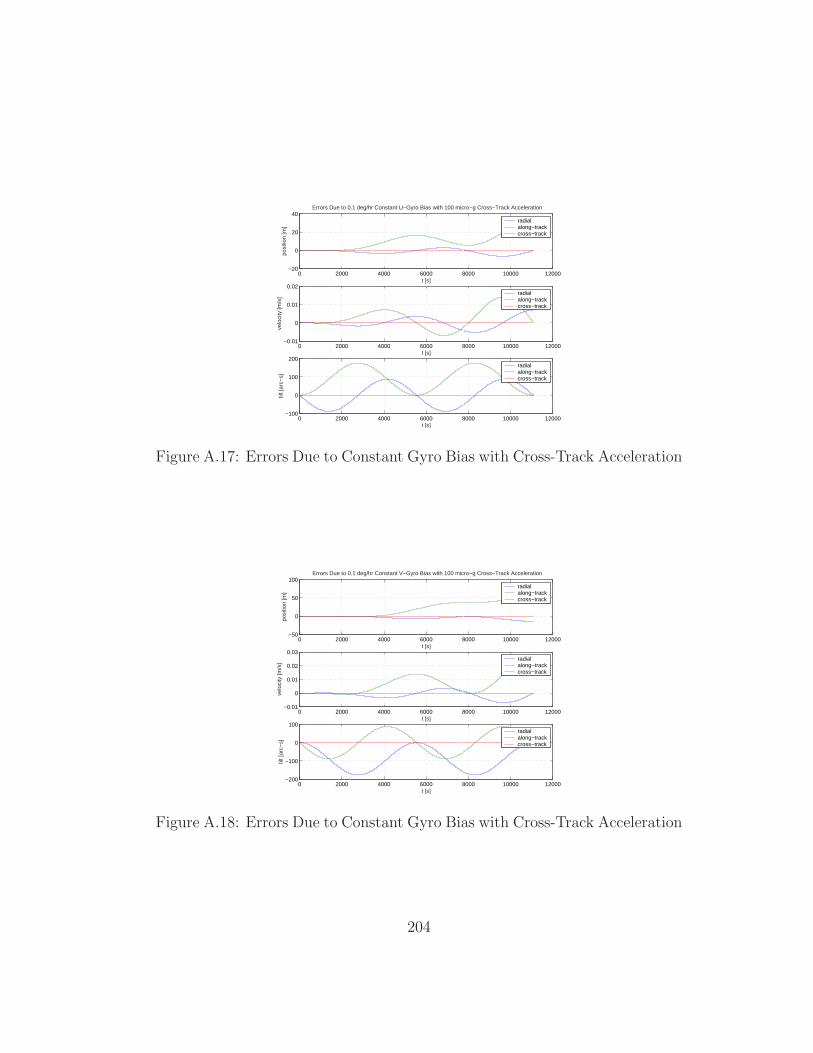
0 2000 4000 6000 8000 10000 12000−20
0
20
40
t [s]po
sitio
n [m
]
Errors Due to 0.1 deg/hr Constant U−Gyro Bias with 100 micro−g Cross−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.01
0
0.01
0.02
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−100
0
100
200
t [s]
tilt [
arc−
s]
radialalong−trackcross−track
Figure A.17: Errors Due to Constant Gyro Bias with Cross-Track Acceleration
0 2000 4000 6000 8000 10000 12000−50
0
50
100
t [s]
posi
tion
[m]
Errors Due to 0.1 deg/hr Constant V−Gyro Bias with 100 micro−g Cross−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.01
0
0.01
0.02
0.03
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−200
−100
0
100
t [s]
tilt [
arc−
s]
radialalong−trackcross−track
Figure A.18: Errors Due to Constant Gyro Bias with Cross-Track Acceleration
204
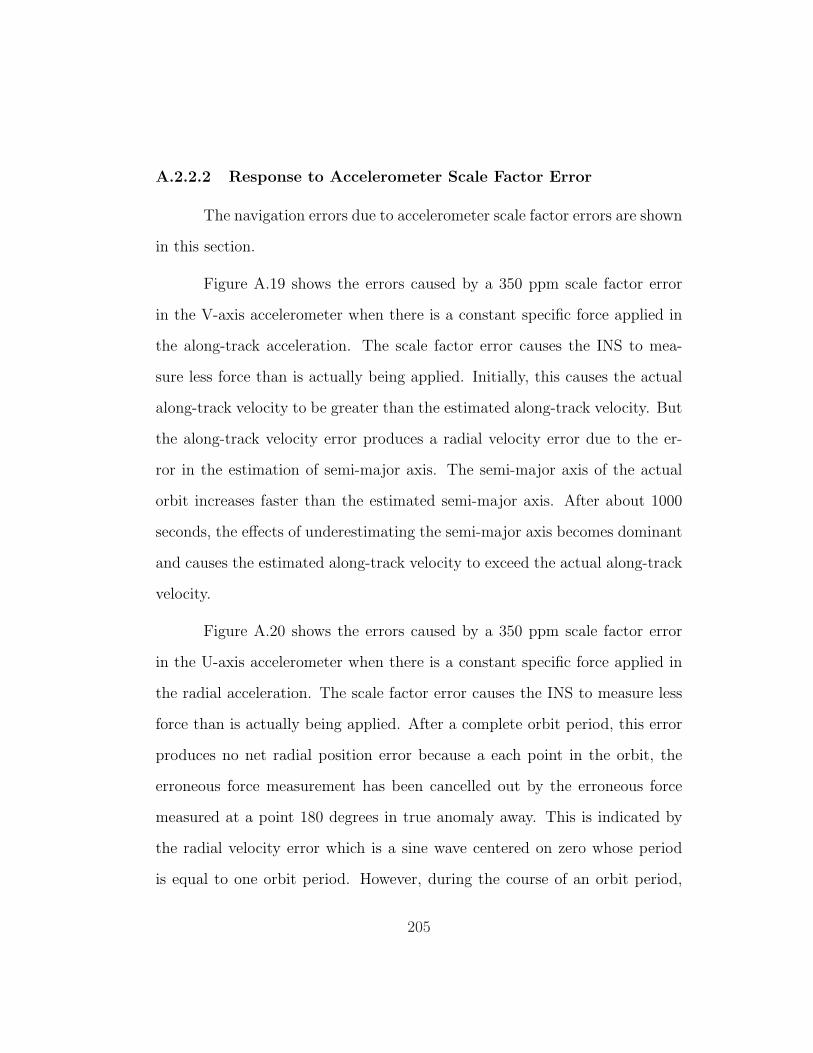
A.2.2.2 Response to Accelerometer Scale Factor Error
The navigation errors due to accelerometer scale factor errors are shown
in this section.
Figure A.19 shows the errors caused by a 350 ppm scale factor error
in the V-axis accelerometer when there is a constant specific force applied in
the along-track acceleration. The scale factor error causes the INS to mea-
sure less force than is actually being applied. Initially, this causes the actual
along-track velocity to be greater than the estimated along-track velocity. But
the along-track velocity error produces a radial velocity error due to the er-
ror in the estimation of semi-major axis. The semi-major axis of the actual
orbit increases faster than the estimated semi-major axis. After about 1000
seconds, the effects of underestimating the semi-major axis becomes dominant
and causes the estimated along-track velocity to exceed the actual along-track
velocity.
Figure A.20 shows the errors caused by a 350 ppm scale factor error
in the U-axis accelerometer when there is a constant specific force applied in
the radial acceleration. The scale factor error causes the INS to measure less
force than is actually being applied. After a complete orbit period, this error
produces no net radial position error because a each point in the orbit, the
erroneous force measurement has been cancelled out by the erroneous force
measured at a point 180 degrees in true anomaly away. This is indicated by
the radial velocity error which is a sine wave centered on zero whose period
is equal to one orbit period. However, during the course of an orbit period,
205
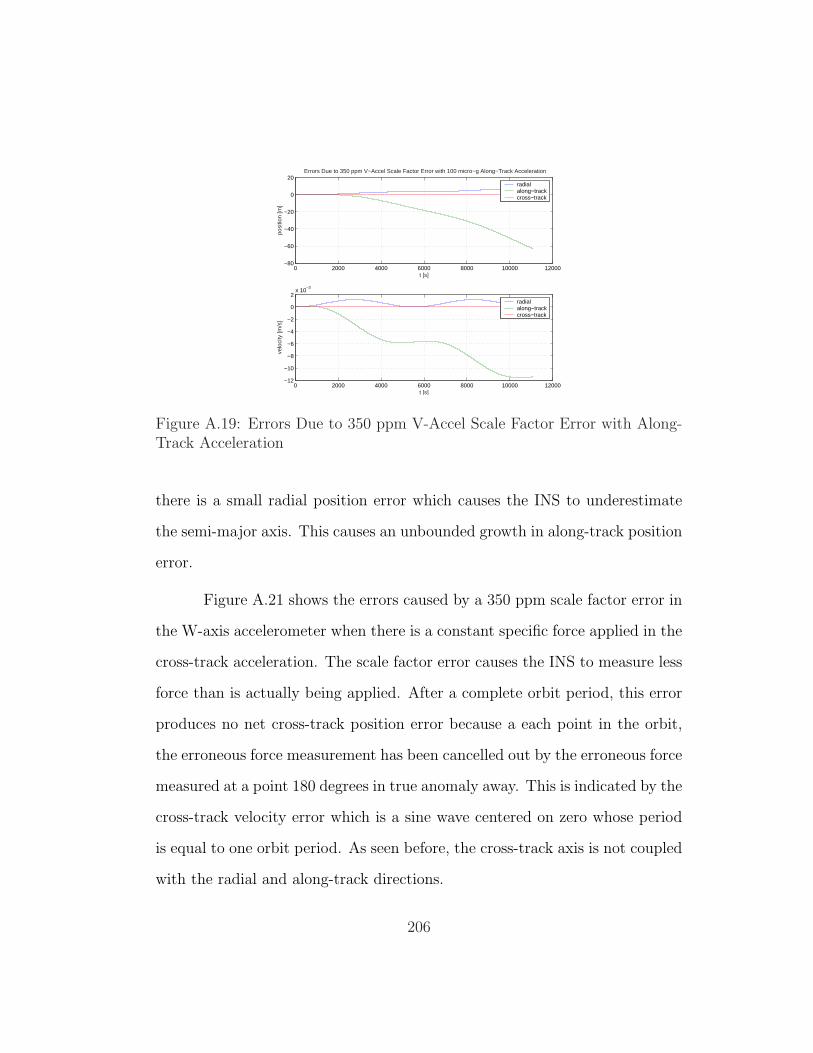
0 2000 4000 6000 8000 10000 12000−80
−60
−40
−20
0
20
t [s]po
sitio
n [m
]
Errors Due to 350 ppm V−Accel Scale Factor Error with 100 micro−g Along−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−12
−10
−8
−6
−4
−2
0
2x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.19: Errors Due to 350 ppm V-Accel Scale Factor Error with Along-Track Acceleration
there is a small radial position error which causes the INS to underestimate
the semi-major axis. This causes an unbounded growth in along-track position
error.
Figure A.21 shows the errors caused by a 350 ppm scale factor error in
the W-axis accelerometer when there is a constant specific force applied in the
cross-track acceleration. The scale factor error causes the INS to measure less
force than is actually being applied. After a complete orbit period, this error
produces no net cross-track position error because a each point in the orbit,
the erroneous force measurement has been cancelled out by the erroneous force
measured at a point 180 degrees in true anomaly away. This is indicated by the
cross-track velocity error which is a sine wave centered on zero whose period
is equal to one orbit period. As seen before, the cross-track axis is not coupled
with the radial and along-track directions.
206
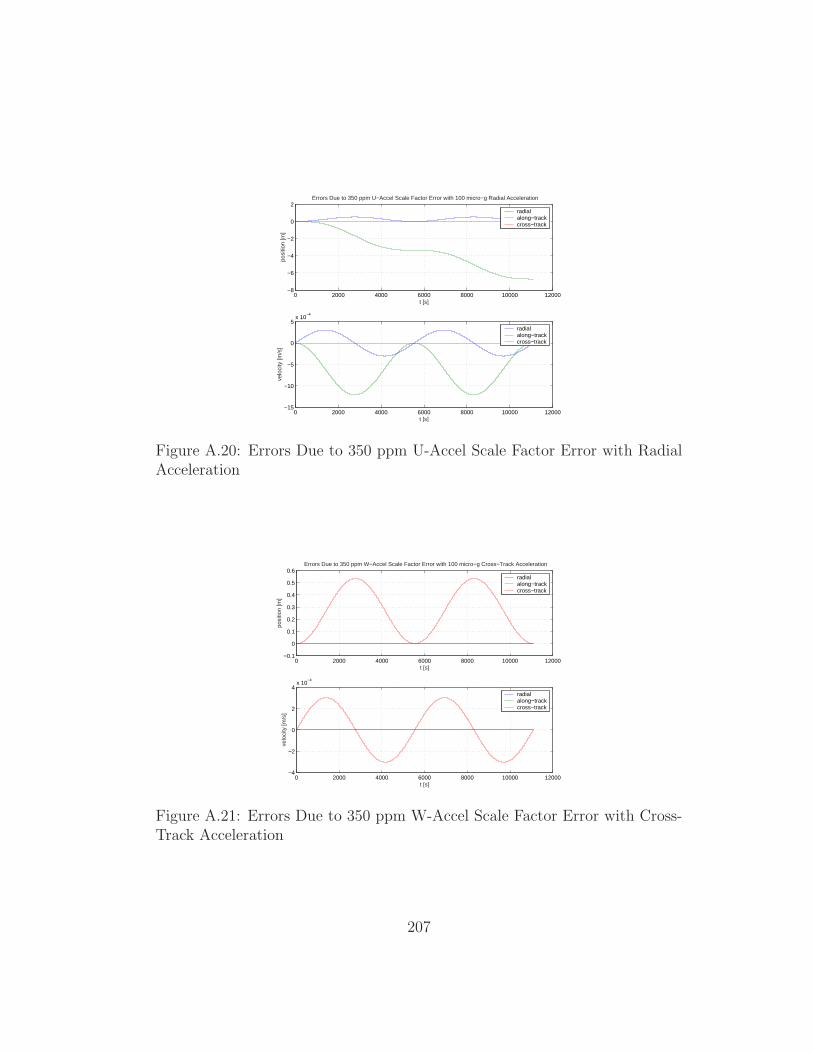
0 2000 4000 6000 8000 10000 12000−8
−6
−4
−2
0
2
t [s]
posi
tion
[m]
Errors Due to 350 ppm U−Accel Scale Factor Error with 100 micro−g Radial Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−15
−10
−5
0
5x 10
−4
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.20: Errors Due to 350 ppm U-Accel Scale Factor Error with RadialAcceleration
0 2000 4000 6000 8000 10000 12000−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
t [s]
posi
tion
[m]
Errors Due to 350 ppm W−Accel Scale Factor Error with 100 micro−g Cross−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−4
−2
0
2
4x 10
−4
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.21: Errors Due to 350 ppm W-Accel Scale Factor Error with Cross-Track Acceleration
207
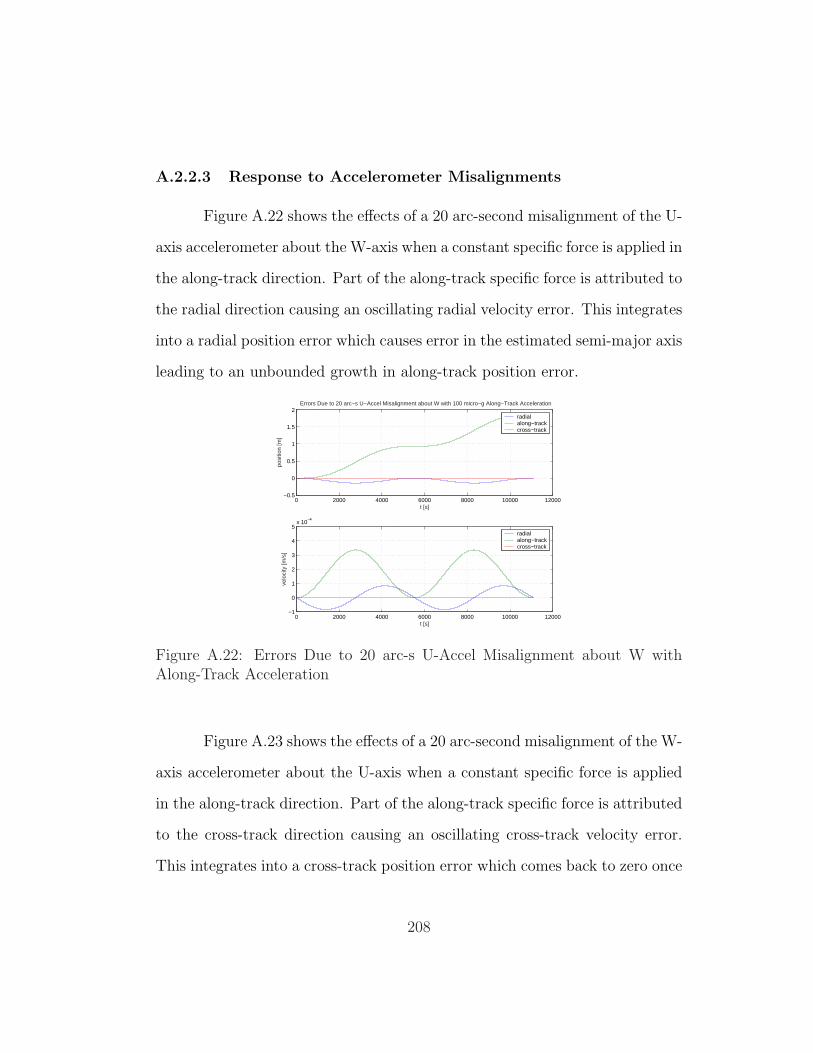
A.2.2.3 Response to Accelerometer Misalignments
Figure A.22 shows the effects of a 20 arc-second misalignment of the U-
axis accelerometer about the W-axis when a constant specific force is applied in
the along-track direction. Part of the along-track specific force is attributed to
the radial direction causing an oscillating radial velocity error. This integrates
into a radial position error which causes error in the estimated semi-major axis
leading to an unbounded growth in along-track position error.
0 2000 4000 6000 8000 10000 12000−0.5
0
0.5
1
1.5
2
t [s]
posi
tion
[m]
Errors Due to 20 arc−s U−Accel Misalignment about W with 100 micro−g Along−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1
0
1
2
3
4
5x 10
−4
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.22: Errors Due to 20 arc-s U-Accel Misalignment about W withAlong-Track Acceleration
Figure A.23 shows the effects of a 20 arc-second misalignment of the W-
axis accelerometer about the U-axis when a constant specific force is applied
in the along-track direction. Part of the along-track specific force is attributed
to the cross-track direction causing an oscillating cross-track velocity error.
This integrates into a cross-track position error which comes back to zero once
208
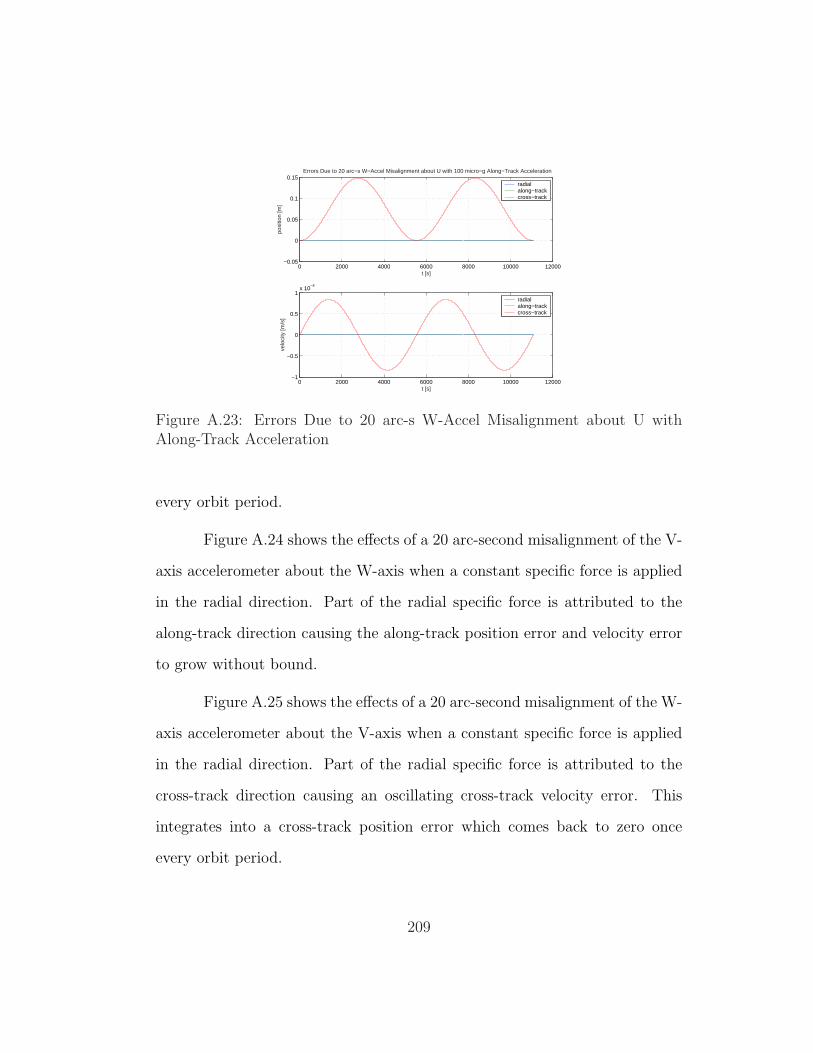
0 2000 4000 6000 8000 10000 12000−0.05
0
0.05
0.1
0.15
t [s]po
sitio
n [m
]
Errors Due to 20 arc−s W−Accel Misalignment about U with 100 micro−g Along−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1
−0.5
0
0.5
1x 10
−4
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.23: Errors Due to 20 arc-s W-Accel Misalignment about U withAlong-Track Acceleration
every orbit period.
Figure A.24 shows the effects of a 20 arc-second misalignment of the V-
axis accelerometer about the W-axis when a constant specific force is applied
in the radial direction. Part of the radial specific force is attributed to the
along-track direction causing the along-track position error and velocity error
to grow without bound.
Figure A.25 shows the effects of a 20 arc-second misalignment of the W-
axis accelerometer about the V-axis when a constant specific force is applied
in the radial direction. Part of the radial specific force is attributed to the
cross-track direction causing an oscillating cross-track velocity error. This
integrates into a cross-track position error which comes back to zero once
every orbit period.
209
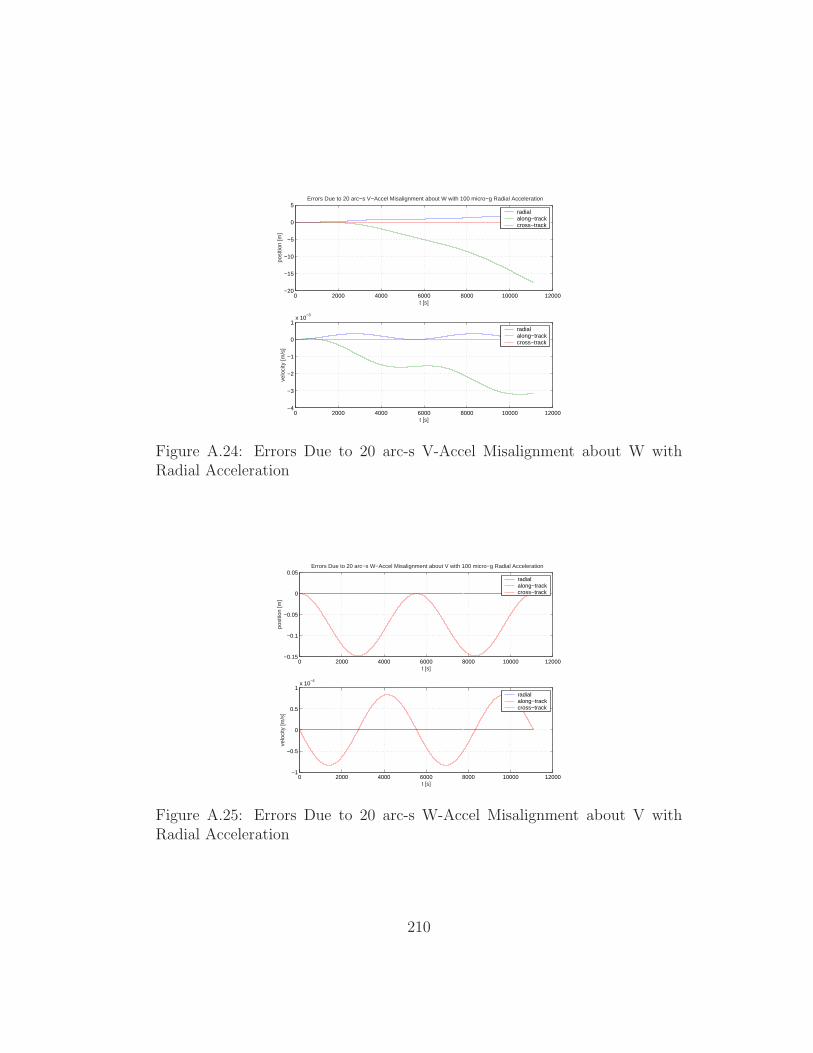
0 2000 4000 6000 8000 10000 12000−20
−15
−10
−5
0
5
t [s]
posi
tion
[m]
Errors Due to 20 arc−s V−Accel Misalignment about W with 100 micro−g Radial Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−4
−3
−2
−1
0
1x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.24: Errors Due to 20 arc-s V-Accel Misalignment about W withRadial Acceleration
0 2000 4000 6000 8000 10000 12000−0.15
−0.1
−0.05
0
0.05
t [s]
posi
tion
[m]
Errors Due to 20 arc−s W−Accel Misalignment about V with 100 micro−g Radial Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1
−0.5
0
0.5
1x 10
−4
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.25: Errors Due to 20 arc-s W-Accel Misalignment about V withRadial Acceleration
210
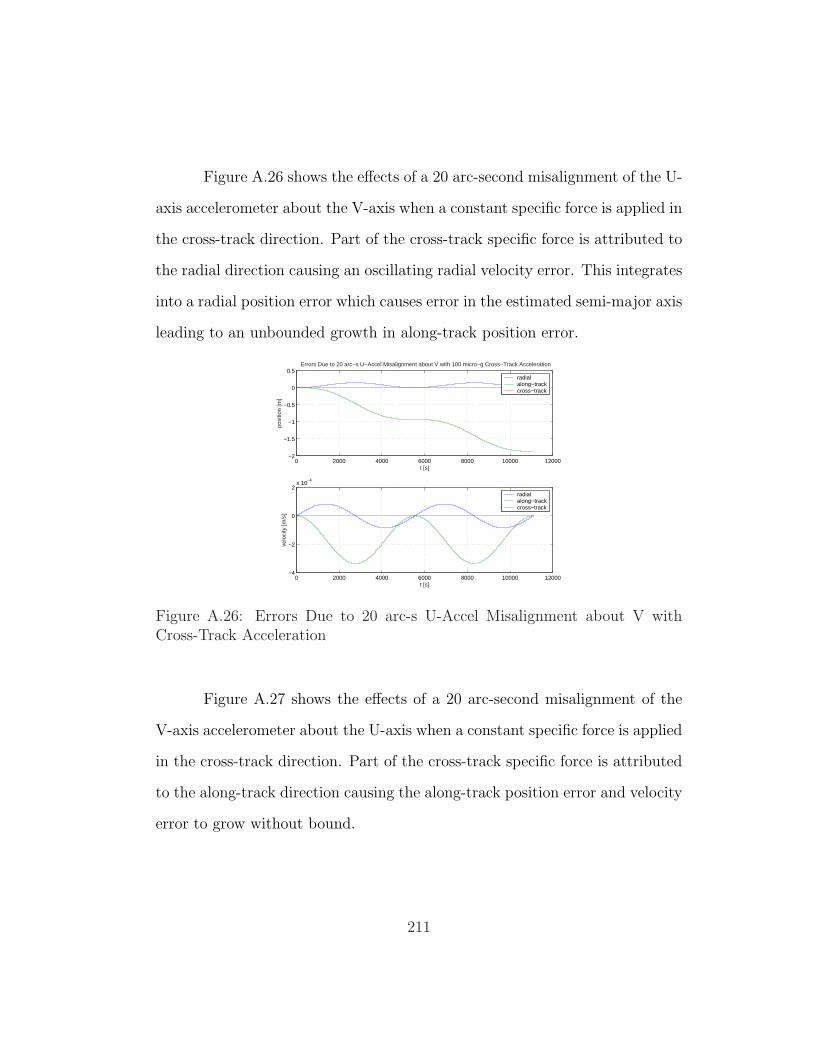
Figure A.26 shows the effects of a 20 arc-second misalignment of the U-
axis accelerometer about the V-axis when a constant specific force is applied in
the cross-track direction. Part of the cross-track specific force is attributed to
the radial direction causing an oscillating radial velocity error. This integrates
into a radial position error which causes error in the estimated semi-major axis
leading to an unbounded growth in along-track position error.
0 2000 4000 6000 8000 10000 12000−2
−1.5
−1
−0.5
0
0.5
t [s]
posi
tion
[m]
Errors Due to 20 arc−s U−Accel Misalignment about V with 100 micro−g Cross−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−4
−2
0
2x 10
−4
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.26: Errors Due to 20 arc-s U-Accel Misalignment about V withCross-Track Acceleration
Figure A.27 shows the effects of a 20 arc-second misalignment of the
V-axis accelerometer about the U-axis when a constant specific force is applied
in the cross-track direction. Part of the cross-track specific force is attributed
to the along-track direction causing the along-track position error and velocity
error to grow without bound.
211
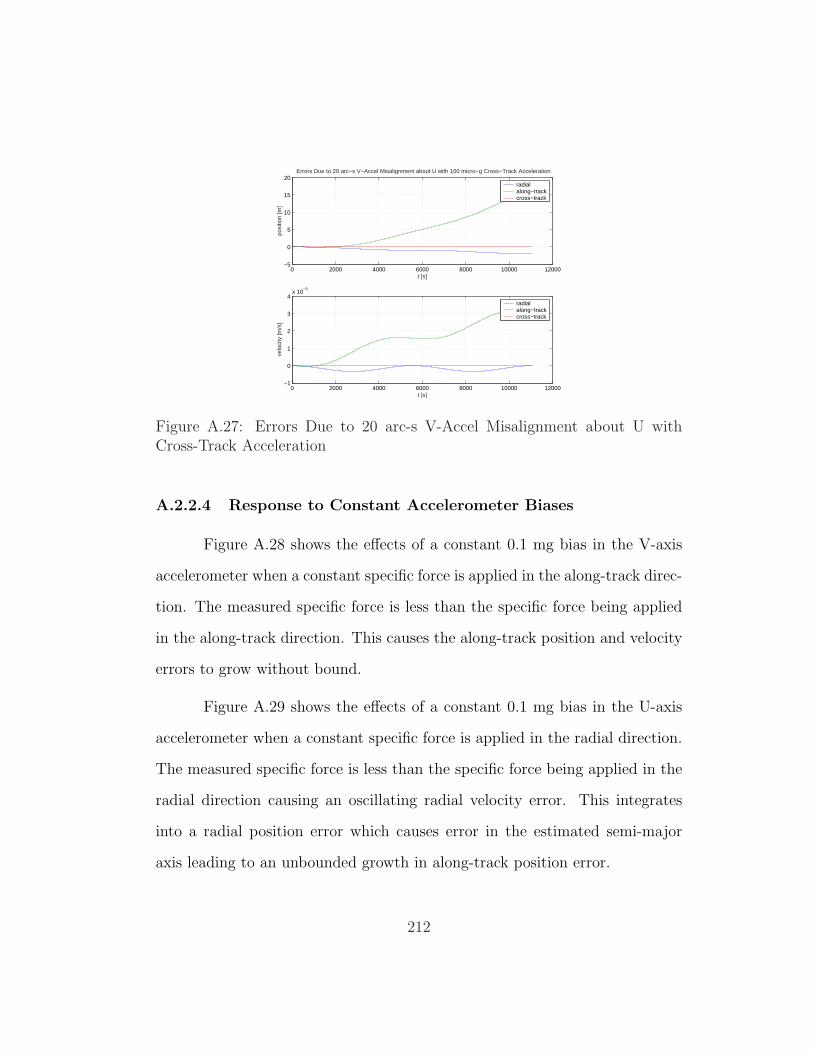
0 2000 4000 6000 8000 10000 12000−5
0
5
10
15
20
t [s]po
sitio
n [m
]
Errors Due to 20 arc−s V−Accel Misalignment about U with 100 micro−g Cross−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1
0
1
2
3
4x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.27: Errors Due to 20 arc-s V-Accel Misalignment about U withCross-Track Acceleration
A.2.2.4 Response to Constant Accelerometer Biases
Figure A.28 shows the effects of a constant 0.1 mg bias in the V-axis
accelerometer when a constant specific force is applied in the along-track direc-
tion. The measured specific force is less than the specific force being applied
in the along-track direction. This causes the along-track position and velocity
errors to grow without bound.
Figure A.29 shows the effects of a constant 0.1 mg bias in the U-axis
accelerometer when a constant specific force is applied in the radial direction.
The measured specific force is less than the specific force being applied in the
radial direction causing an oscillating radial velocity error. This integrates
into a radial position error which causes error in the estimated semi-major
axis leading to an unbounded growth in along-track position error.
212
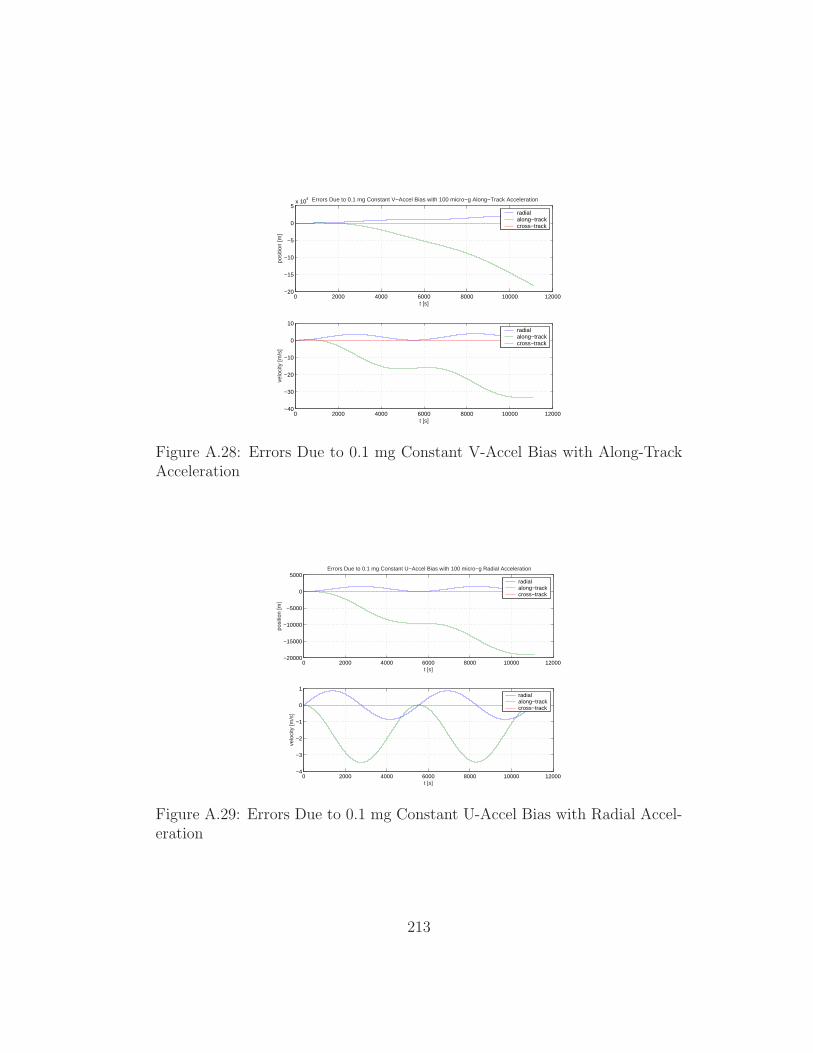
0 2000 4000 6000 8000 10000 12000−20
−15
−10
−5
0
5x 10
4
t [s]
posi
tion
[m]
Errors Due to 0.1 mg Constant V−Accel Bias with 100 micro−g Along−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−40
−30
−20
−10
0
10
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.28: Errors Due to 0.1 mg Constant V-Accel Bias with Along-TrackAcceleration
0 2000 4000 6000 8000 10000 12000−20000
−15000
−10000
−5000
0
5000
t [s]
posi
tion
[m]
Errors Due to 0.1 mg Constant U−Accel Bias with 100 micro−g Radial Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−4
−3
−2
−1
0
1
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.29: Errors Due to 0.1 mg Constant U-Accel Bias with Radial Accel-eration
213
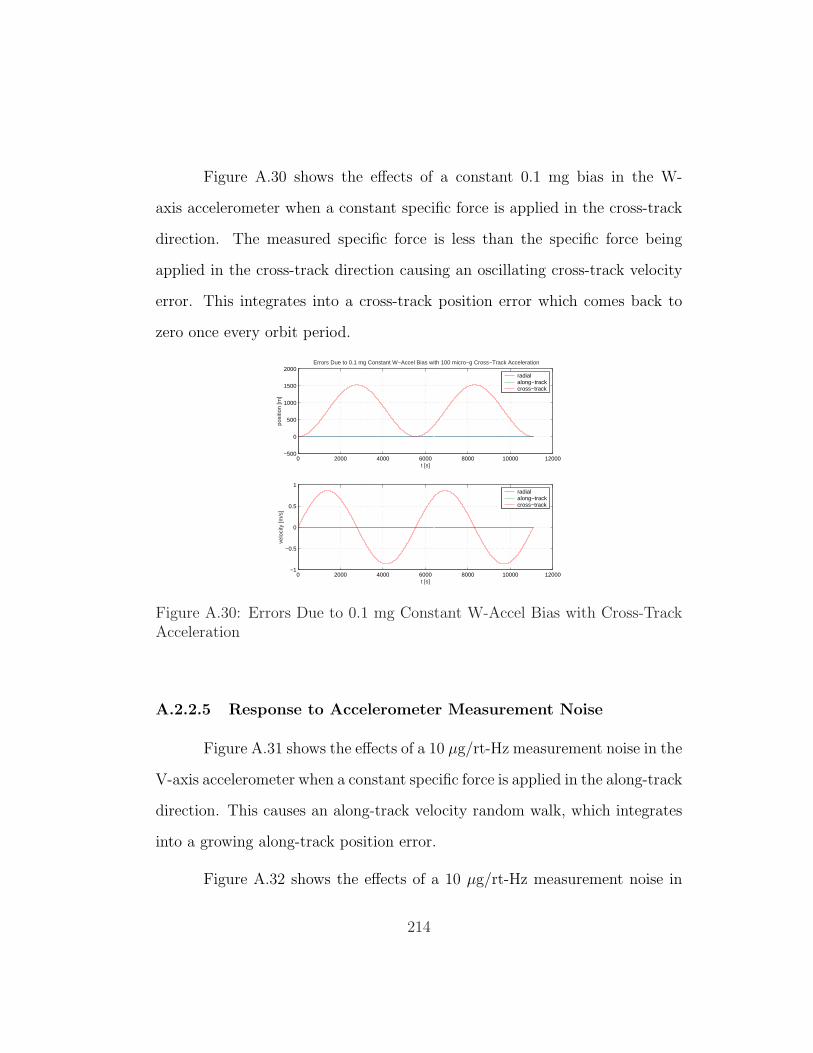
Figure A.30 shows the effects of a constant 0.1 mg bias in the W-
axis accelerometer when a constant specific force is applied in the cross-track
direction. The measured specific force is less than the specific force being
applied in the cross-track direction causing an oscillating cross-track velocity
error. This integrates into a cross-track position error which comes back to
zero once every orbit period.
0 2000 4000 6000 8000 10000 12000−500
0
500
1000
1500
2000
t [s]
posi
tion
[m]
Errors Due to 0.1 mg Constant W−Accel Bias with 100 micro−g Cross−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−1
−0.5
0
0.5
1
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.30: Errors Due to 0.1 mg Constant W-Accel Bias with Cross-TrackAcceleration
A.2.2.5 Response to Accelerometer Measurement Noise
Figure A.31 shows the effects of a 10 µg/rt-Hz measurement noise in the
V-axis accelerometer when a constant specific force is applied in the along-track
direction. This causes an along-track velocity random walk, which integrates
into a growing along-track position error.
Figure A.32 shows the effects of a 10 µg/rt-Hz measurement noise in
214
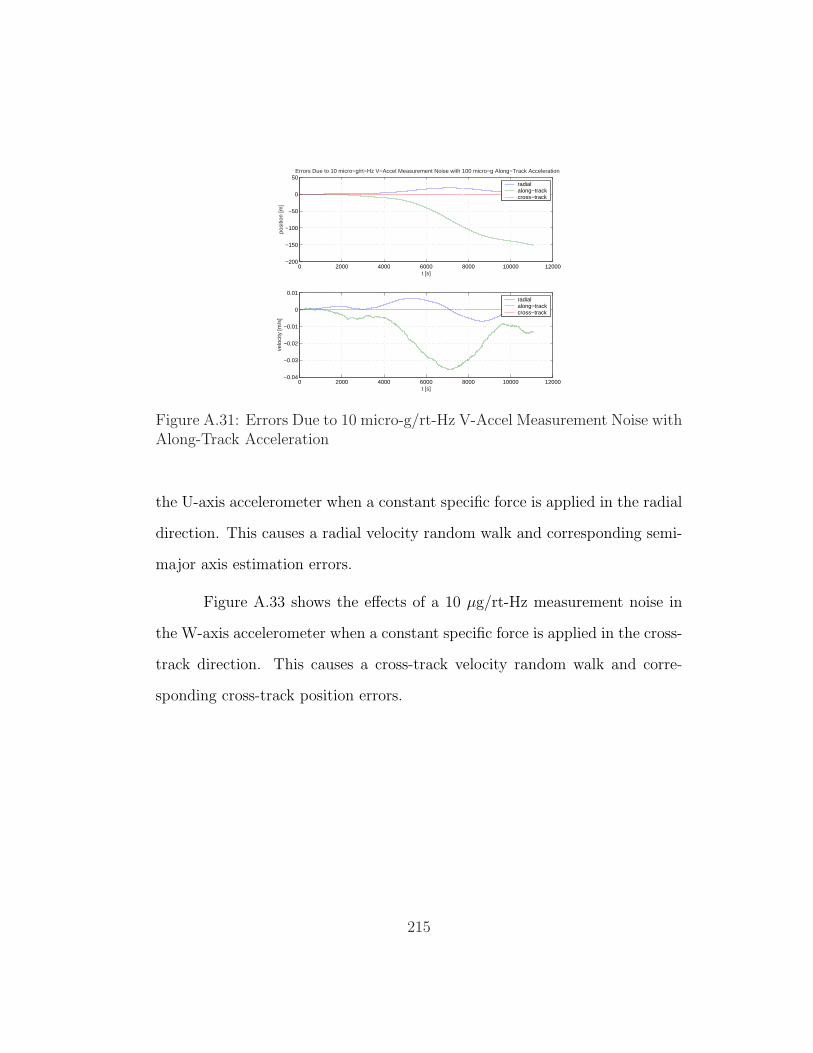
0 2000 4000 6000 8000 10000 12000−200
−150
−100
−50
0
50
t [s]po
sitio
n [m
]
Errors Due to 10 micro−g/rt−Hz V−Accel Measurement Noise with 100 micro−g Along−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.04
−0.03
−0.02
−0.01
0
0.01
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.31: Errors Due to 10 micro-g/rt-Hz V-Accel Measurement Noise withAlong-Track Acceleration
the U-axis accelerometer when a constant specific force is applied in the radial
direction. This causes a radial velocity random walk and corresponding semi-
major axis estimation errors.
Figure A.33 shows the effects of a 10 µg/rt-Hz measurement noise in
the W-axis accelerometer when a constant specific force is applied in the cross-
track direction. This causes a cross-track velocity random walk and corre-
sponding cross-track position errors.
215
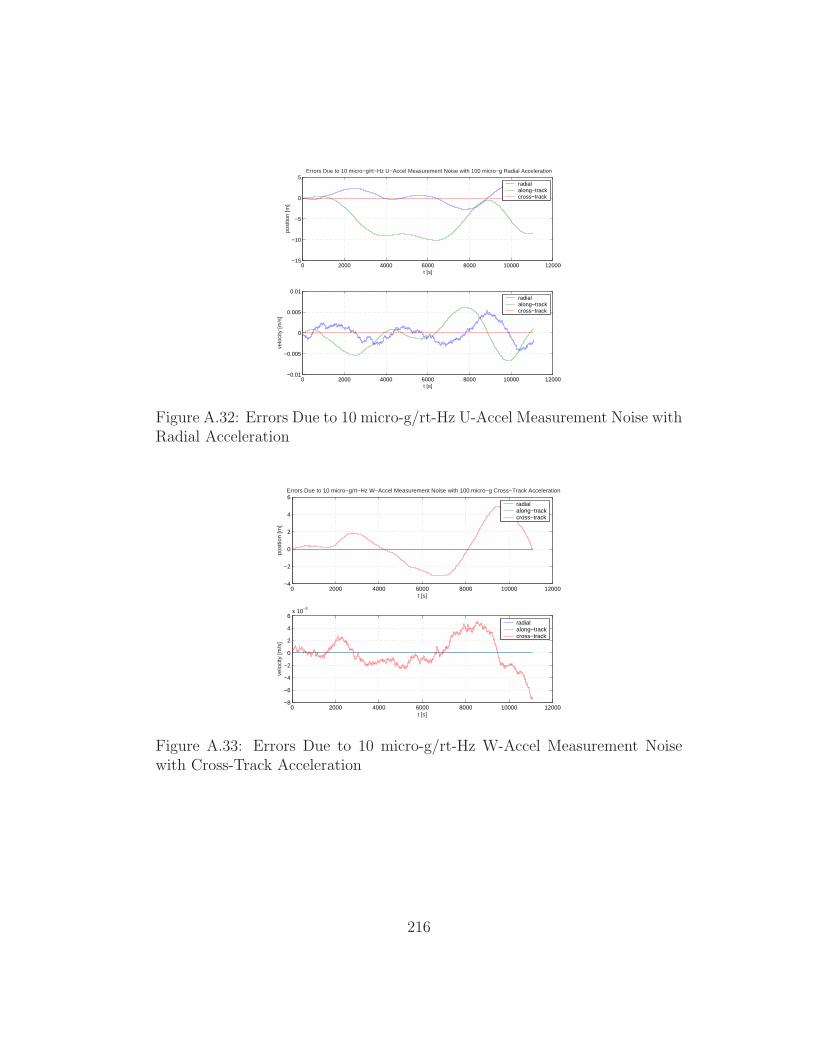
0 2000 4000 6000 8000 10000 12000−15
−10
−5
0
5
t [s]
posi
tion
[m]
Errors Due to 10 micro−g/rt−Hz U−Accel Measurement Noise with 100 micro−g Radial Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−0.01
−0.005
0
0.005
0.01
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.32: Errors Due to 10 micro-g/rt-Hz U-Accel Measurement Noise withRadial Acceleration
0 2000 4000 6000 8000 10000 12000−4
−2
0
2
4
6
t [s]
posi
tion
[m]
Errors Due to 10 micro−g/rt−Hz W−Accel Measurement Noise with 100 micro−g Cross−Track Acceleration
radialalong−trackcross−track
0 2000 4000 6000 8000 10000 12000−8
−6
−4
−2
0
2
4
6x 10
−3
t [s]
velo
city
[m/s
]
radialalong−trackcross−track
Figure A.33: Errors Due to 10 micro-g/rt-Hz W-Accel Measurement Noisewith Cross-Track Acceleration
216
A.3 Conclusions
A linear INS error model for a spacecraft in orbit has been developed.
This error model was used to construct an orbital INS error simulator, which
computes the navigation and attitude errors committed by an unaided INS in
orbit. The following conclusions about unaided INS navigation can be drawn
from the simulation results:
1. The unforced errors behave according to the CW equations.
2. The Schuler period = the orbit period.
3. Initial radial position errors and along-track velocity errors cause un-
bounded position error growth. This is equivalent to an initial error in
the estimate of semi-major axis.
4. Radial and along-track errors are coupled because they both affect the
energy or semi-major axis of the estimated orbit.
5. Errors in the estimation of the semi-major axis lead to unbounded error
growth. Therefore, the ability to accurately estimate the semi-major
axis should be a key figure of merit for evaluating a spacecraft INS.
6. Cross-track errors are not coupled with the along-track or radial errors.
7. Unforced platform tilts are constant in inertial space.
217
8. Spacecraft have a constant, high angular rate due to orbital motion,
therefore an INS in orbit is sensitive to gyro scale factor and bias errors
about the angular momentum vector.
9. Unbounded along-track position errors result from: along-track accelerom-
eter scale factor or bias errors with along-track specific force, radial ac-
celerometer scale factor or bias errors with radial specific force, mis-
alignment of radial accelerometer with along-track or cross-track spe-
cific force, and misalignment of along-track accelerometer with radial or
cross-track specific force.
218
Appendix B
Stochastic Process Models
Maybeck [29] provides an excellent discussion of stochastic process mod-
els, which is summarized briefly in this section. The following stochastic pro-
cesses are used in INS error models: white Gaussian noise, Gaussian random
constants, random walks and first order Markov processes, whose characteris-
tics are described below.
B.1 White Gaussian Noise
A process x (· , ·) is a white Gaussian process if, for any choice of N
times, the N random vectors x (t1, ·) , . . . ,x (tN , ·) are independent Gaussian
random vectors. This implies:
Ex (ti)x
T (tj)
= Ψxx (ti) δ (ti − tj) (B.1)
B.2 Gaussian Random Constant
A random constant is modelled as a Gaussian random constant x (t0)
with a specified mean m0 and covariance P0 that behaves according to:
x (t) = 0 (B.2)
219

This model is used for bias stability for gyros and accelerometers, scale
factor errors and misalignments. The value can vary from one turn-on to the
next but remains constant while the instrument is turned on.
B.3 Random Walk
Random walk is the output generated by integrating white Gaussian
noise. If w (t)is zero-mean, white Gaussian noise process then:
x (t) = w (t) ; x (t0) ≡ 0 (B.3)
where E w (t) w (t + τ) = Qδ (τ) and E x2 (t) = Q [t− t0].
B.4 First Order Markov
A first order Markov process is a first order lag driven by zero-mean
white Gaussian noise of strength Q described by:
x (t) = − 1
Tx (t) + w (t) (B.4)
where E [x (t) x (t + τ)] = σ2e− |τ |/T and Q = 2σ2
/T .
B.5 Equivalent Discrete-Time Models
The implementation of stochastic process models on a digital computer
necessitates the development of discrete-time models that are equivalent to
the continuous-time models. This development presented in Maybeck [29] is
summarized below.
220

The general continuous-time differential equation is given by
x (t) = F (t)x (t) + B (t)u (t) + G (t)w (t) (B.5)
where u(t) is a vector of deterministic controls (or forcing functions) applied
at time t and w(t) is a zero-mean, white Gaussian noise vector of strength
Q(t). If u(t) is held constant over each sample period from sample time ti to
ti+1, at time ti+1, the solution to equation (B.5) can be written as:
x (ti+1) = Φ (ti+1, ti)x (ti) +[∫ ti+1
tiΦ (ti+1, τ)B (τ) dτ
]u (ti)
+[∫ ti+1
tiΦ (ti+1, τ)G (τ) dβ (τ)
] (B.6)
This can be written as an equivalent stochastic difference equation as:
x (ti+1) = Φ (ti+1, ti)x (ti) + Bd (ti)u (ti) + wd (ti) (B.7)
where:
Bd (ti) =
∫ ti+1
ti
Φ (ti+1, τ)B (τ) dτ (B.8)
and wd (ti) is a white Gaussian discrete-time stochastic process whose statistics
are equal to those of∫ ti+1
tiΦ (ti+1, τ)G (τ) dβ (τ) for all sample times, hence:
E wd (ti) = 0 (B.9)
Ewd (ti)w
Td (ti)
= Qd (B.10)
Qd =
∫ ti+1
ti
Φ (ti+1, τ)G (τ)Q (τ)GT (τ) ΦT (ti+1, τ) dτ (B.11)
Ewd (ti)w
Td (tj)
= 0 (B.12)
221

In the case of a time-invariant system with stationary noise inputs, and
a sample period that is short compared to the system’s natural transients, the
following first order approximations may be used:
Φ (ti+1, ti) ≈ I + F (ti) [ti+1 − ti] (B.13)
Bd (ti) ≈ B (ti) [ti+1 − ti] (B.14)
Qd (ti) ≈ G (ti)Q (ti) GT (ti) [ti+1 − ti] (B.15)
B.5.1 First Order Markov
For a scalar, first order Markov process with a fixed time interval be-
tween samples ∆t:
Φ (ti+1, ti) = e−1T
∆t; G = 1; Q =2σ2
T(B.16)
Substituting (B.16) into (B.11) leads to:
Qd = Q
∫ ti+1
ti
e−2T
(ti+1−τ)dτ =QT
2
[1− e−
2T
∆t]
= σ2[1− e−
2T
∆t]
(B.17)
B.5.2 Random Walk
For a random walk process with a fixed time interval between samples:
Φ (ti+1, ti) = 1; G = 1 (B.18)
therefore,
Qd = Q ∆t (B.19)
222
Bibliography
[1] Penina Axelrad, Christopher J. Comp, and Peter F. MacDoran. SNR-
Based Multipath Error Correction for GPS Differential Phase. IEEE
Transactions on Aerospace and Electronic Systems, 32(2), April 1996.
[2] B. Belloul, S.R. Saunders, M.A.N. Parks, and B.G. Evans. Measurement
and Modelling of Wideband Propagation at L- and S-bands Applicable to
the LMS Channel. IEEE Proceedings: Microwave Antenna Propagation,
147(2), April 2000.
[3] Donald O. Benson. A Comparison of Two Approaches to Pure-Inertial
and Doppler-Inertial Error Analysis. IEEE Transactions on Aerospace
and Electronic Systems, AES-11(4):447–455, July 1975.
[4] Michael S. Braasch. On the Characterization of Multipath Errors in
Satellite-Based Precision Approach and Landing Systems. PhD thesis,
Ohio University, June 1992.
[5] Kevin Braden, Clint Browning, and Hendrik Gelderloos. Integrated Iner-
tial Navigation System/Global Positioning System (INS/GPS) for Auto-
matic Space Return Vehicle. Proceedings of the IEEE/AIAA/NASA 9th
Digital Avionics Systems Conference, October 1990.
223
[6] Kenneth R. Britting. Inertial Navigation Systems Analysis. John Wiley
& Sons, Inc., New York, 1971.
[7] Robert Grover Brown and Patrick Y.C. Hwang. Introduction to Random
Signals and Applied Kalman Filtering. John Wiley & Sons, New York,
3rd edition, 1997.
[8] NASA Marshall Spaceflight Center. Beginning a New Era of Space Flight:
The Orbital Space Plane. NASA Fact Sheets, (FS-2003-05-64-MSFC),
May 2003.
[9] NASA Marshall Spaceflight Center. The Space Launch Initiative: Tech-
nology to Pioneer the Space Frontier. NASA Fact Sheets, (FS-2003-02-
28-MSFC), February 2003.
[10] Averil B. Chatfield. Fundamentals of High Accuracy Inertial Naviga-
tion. American Institute of Aeronautics and Astronautics, Inc., Reston,
Virginia, 1997.
[11] Christopher J. Comp. GPS Carrier Phase Multipath Characterization
and a Mitigation Technique Using the Signal-To-Noise Ratio. PhD thesis,
University of Colorado, July 1996.
[12] Timothy P. Crain and Robert H. Bishop. Mars Entry Navigation: Atmo-
spheric Interface Through Parachute Deploy. Proceedings of the AIAA
Atmospheric Flight Mechanics Conference, (AIAA Paper 2002-4501), Au-
gust 2002.
224
[13] Takuji Ebinuma. Precision Spacecraft Rendezvous Using Global Posi-
tioning System: An Integrated Hardware Approach. PhD thesis, The
University of Texas at Austin, August 2001.
[14] Joseph Elchynski, Jeff Kirkland, and Jim Conner. Development and
Test Results of a Precision Approach and Landing Capability for Military
Aircraft Using an Embedded GPS/INS (EGI) System. Proceedings of
IEEE Position Location and Navigation Symposium.
[15] Jay A. Farrell and Matthew Barth. The Global Positioning System and
Inertial Navigation. McGraw-Hill, New York, 1999.
[16] Bernard Friedland. Analysis of Strapdown Navigation Using Quater-
nions. IEEE Transactions on Aerospace and Electronic Systems, AES-
14(5):764–768, September 1978.
[17] Susan F. Gomez. Flying High: GPS on the International Space Station
and Crew Return Vehicle. GPS World, June 2002.
[18] John L. Goodman. Space Shuttle Navigation in the GPS Era. Proceed-
ings of the ION National Technical Meeting, January 2001.
[19] John L. Goodman. GPS in Earth Orbit - Experiences from the Space
Shuttle, International Space Station and Crew Return Vehicle Programs.
Proceedings of the Core Technologies for Space Systems Conference, Novem-
ber 2002. Available at: http://www.spacecoretech.org/.
225
[20] Hari B. Hablani, Myron L. Tapper, and David J. Dana-Bashian. Guid-
ance and Relative Navigation for Autonomous Rendezvous in a Circular
Orbit. Journal of Guidance, Control, and Dynamics, 25(3), May - June
2002.
[21] Bernhard Hoffman-Wellenhof, Herbert Lichtenegger, and James Collins.
Global Positioning System: Theory and Practice. Springer-Verlag/Wien,
New York, 5th edition, 2001.
[22] Christopher Jekeli. Inertial Navigations Systems with Geodetic Applica-
tions. Walter de Gruyter GmbH & Co., Berlin, Germany, 2000.
[23] Elliott D. (ed.) Kaplan. Understanding GPS: Principles and Applica-
tions. Artech House Publishers, Norwood, MA, 1996.
[24] Karl Kovach. New User Equivalent Range Error (UERE) Budget for the
Modernized Navstar Global Positioning System (GPS). Proceedings of
the ION National Technical Meeting, January 2000.
[25] William C.Y. Lee. Mobile Communications Design Fundamentals. Howard
W. Sams & Co., Indianapolis, IN, 1986.
[26] E. Glenn Lightsey. Development and Flight Demonstration of a GPS
Receiver for Space. PhD thesis, Stanford University, February 1997.
[27] E. Glenn Lightsey and Jaeyong Um. Autonomous Relative Navigation
Methods in the Proximity of the International Space Station. Proceedings
of the KIS-2001 Conference.
226
[28] Cheng-Hsien Liu and et al. Characterization of a High-Sensitivity Mi-
cromachined Tunneling Accelerometer with Micro-g Resolution. Journal
of Micromechanical Systems, 7(2), June 1998.
[29] Peter S. Maybeck. Stochastic Models, Estimation, and Control, volume 1.
Academic Press, Inc., Florida, 1997.
[30] Oliver Montenbruck and Eberhard Gill. Satellite Orbits: Models, Meth-
ods, and Applications. Springer-Verlag, Berlin, Germany, 2000.
[31] Emilio Mora-Castro, Carmelo Carrascosa-Sanz, and Guillermo Ortega.
Characterisation of the Multipath Effects on the GPS Pseudorange and
Carrier Phase Measurements. Proceedings of the ION-GPS 1998 Confer-
ence, 1998.
[32] NASA. Introduction to NASA’s Integrated Space Transportation Plan
and Space Launch Initiative. May 2001. http:\\www.nasa.gov.
[33] GPS Program Office. NAVSTAR GPS Space Segment/Navigation User
Interfaces. Technical Report ICD-GPS-200, ARINC Research Corp.,
Fountain Valley, CA, 1997.
[34] Bradford W. Parkinson and James J. Spilker, Jr, editors. Global Posi-
tioning System: Theory and Applications, volume 1 of Progress in Astro-
nautics and Aeronautics. American Institute of Aeronautics and Astro-
nautics, Inc., Washington, DC, 1996.
[35] J.G. Proakis. Digital Communications. Wiley & Sons, New York, 1989.
227
[36] Theodore S. Rappaport. Wireless Communications: Principles and Prac-
tice. Prentice-Hall, Inc., Upper Saddle River, NJ, 2nd edition, 2002.
[37] Terry V. Roszhart, Hal Jerman, Joe Drake, and Constant de Cotiis. An
Inertial-Grade, Micromachined Vibrating Beam Accelerometer. Proceed-
ings of Transducers ’95, June 1995.
[38] Adel A. M. Saleh and Reinaldo A. Valenzuela. A Statistical Model for
Indoor Multipath Propagation. IEEE Journal on Selected Areas in Com-
munications, SAC-5(2), February 1987.
[39] S.J. Sanders, L.K. Strandjord, and D. Mead. Fiber Optic Technology
Trends - A Honeywell Perspective. Optical Fiber Sensors Conference
Technical Digest, May 2002.
[40] G. L. Turin, F. D. Clapp, T. L. Johnston, S. B. Fine, and D. Lavry. A
Statistical Model of Urban Multipath Propagation. IEEE Transactions
on Vehicular Technology, VT-21(1), February 1972.
[41] Jayeong Um. Relative Navigation and Attitude Determination Using a
GPS/INS Integrated System Near the International Space Station. PhD
thesis, The University of Texas at Austin, December 2001.
[42] David A. Vallado. Fundamentals of Astrodynamics and Applications.
Microcosm Press, El Segundo, CA, 2nd edition, 2001.
[43] Richard D. J. Van Nee. Multipath Effects on GPS Code Phase Measure-
ments. Journal of The Institute of Navigation, 39(2), 1992.
228
[44] Jan Van Rees. Measurements of the Wide-Band Radio Channel Charac-
teristics for Rural, Residential and Suburban Areas. IEEE Transactions
on Vehicular Technology, VT-36, February 1987.
[45] James E. (ed.) Wertz. Spacecraft Attitude Determination and Control.
D. Reidel Publishing Company, Dordrecht, Holland, 1978.
[46] W. S. Widnall and P. A. Grundy. Inertial Navigation System Error Mod-
els. Technical Report Intermetrics TR-03-73, Intermetrics, Inc., Cam-
bridge, Massachusetts, May 1973.
[47] Bob Willms. Space Integrated GPS/INS (SIGI) Navigation System for
Space Shuttle. Proceedings of 18th IEEE Digital Avionics Systems Con-
ference, 2, October 1999.
229
Vita
David Edward Gaylor was born on November 15, 1962 in Lansing,
Michigan, the son of George and Toshiko Gaylor. He attended Oshkosh West
High School where he graduated with Highest Honors. He received a Bachelor
of Science in Astronautical Engineering from the U.S. Air Force Academy. He
was commissioned as an officer in the Air Force and stationed at the Central
Inertial Test Facility (CIGTF), Holloman AFB, NM, where he was an Inertial
Navigation Systems Analyst. He attended the Air Force Institute of Technol-
ogy and received a Master of Science in Astronautical Engineering. He was
stationed at the Consolidated Space Test Center, Onizuka, AFB, CA, where he
served as Satellite Operations Director for 3 Strategic Defense Initiative pro-
grams and Chief of Engineering for Mission Control Complex 6. After leaving
the Air Force, he has worked as a GPS Navigation System Analyst, a Mission
Analyst for the Globalstar satellite constellation, and a Systems Engineer for
the Iridium and Teledesic satellite constellations.
Permanent address: 1260 Greenfield TrailOshkosh, WI 54904Email: [email protected]
This dissertation was typeset with LATEX† by the author.
†LATEX is a document preparation system developed by Leslie Lamport as a specialversion of Donald Knuth’s TEX Program.
230
Top Related
Copyright © 2022 FDOKUMEN

